Modellierung von Echtzeitsystemen
|
|
|
- Elke Bieber
- vor 5 Jahren
- Abrufe
Transkript
1 Modellierung von n Synchroner Datenfluss Werkzeug: EasyLab 121
2 Entwicklungsprozess in EasyLab 1. Spezifikation der Zielhardware 2. Modellierung der Zustandslogik sowie der abzuarbeitenden Aufgabe je Zustand 3. Simulation des Programms zum Testen und zur Erkennung von Fehlern 4. Codegenerierung und Echtzeit-Visualisierung des Zustands der Zielhardware 1. Hardwaremodell 3. Simulation 4. Codegenerierung, Deployment Testen, Parametrisieren 2. Anwendungsmodell Echtzeit- Visualisierung

 Funktionsblöcke")
3 Synchroner Datenfluss Funktionsblöcke Grundlagen Eingänge und Ausgänge Synchronitätshypothese Interner Zustand Black boxes -Sicht Zugeordnete Aktionen Effizienz und Zuverlässigkeit Komposition von Funktionsblöcken Berechnung statischer Schedules Typisierte Verbindungen Deterministisches Laufzeitverhalten In Bearbeitung: Hierarchische Statische Speicherallokation (RAM) Funktionsblöcke Erzeugung kompakten Codes (ROM)


4 Überladen von Aktoren Aktoren können typunabhängig angeboten werden Der Typ eines Aktors ist solange frei wählbar, bis sich durch Anschlussbelegung der Typ automatisch ergibt 124


5 Geräte Hardware Mikrocontroller Sensoren und Aktoren Geräte Hierarchische Beschreibung der Hardware Ressourcenmanagement Modellierung der Hardwarefunktionalität Beispiele: I/O-Pins, ADCs, Timer, Schnittstelle zur Anwendungslogik Hardwarezugriff Geräte bieten eine Menge von Funktionsblöcken an


6 Anwendung Pneumatischer Zylinder Hardware Zylinder Positionssensor (Kolben) Endlagenschalter Zwei Magnetventile Steuerungseinheit Mikrocontroller Analog-Digital-Wandler Treiber für induktive Lasten Ventile Ziel: Positionssteuerung des Kolbens Umsetzung Hardware-Modell aus Bibliothek für Match-X Anwendungsmodell Kleines Datenflussdiagramm Integration der Hardwarefunktionalität Steuereinheit Wegsensor
7 EasyLab: Zustandsfluss-Diagramme Zustandsfluss-Diagramme An IEC angelehnt Zustand: Referenz auf SDF-Modell Transitionsbedingungen: Boolesche Ausdrücke mit Variablen Komposition von Zuständen Zustandsfolgen Alternativ- und Parallelzweige Sprünge Vorteile Modellierung von Zuständen (vgl. Automaten) Diagrammart weit verbreitet in Anwendungsdomäne




8 Perspektiven Ausdehnung der Modellierung auf verteilte Systeme Automatische Parallelisierung für Multi- und Many-Core-Systeme: Besseren Verhältnisses von Leistung / Energieeinsatz Berücksichtigung nicht-funktionaler Eigenschaften Automatische Erzeugung energieeffizienten Codes Fehlertoleranz-Mechanismen Quality of Service Verstärker Einsatz in Lehre und Ausbildung Mikrocontroller-Praktikum Übung zur Vorlesung
9 Modellierung von n Zeitgesteuerte Systeme Werkzeug: Giotto 129
10 Giotto: Hintergrund Programmierumgebung für eingebettete Systeme (evtl. ausgeführt im verteilten System) Ziel: strikte Trennung von plattformunabhängiger Funktionalität und plattformabhängigen Scheduling und Kommunikation temporaler Determinismus Hauptkonzept: Logische Ausführungszeiten Aktoren: Tasks Programmblock aus sequentiellen Code keine Synchronisationspunkte, blockende Operationen erlaubt Schnittstellen: Ports Drivers: realisieren die Kommunikation zwischen Ports Flexibilität durch Modes/Guards Ausführung durch virtuelle Maschinen: Embedded Machine: Reaktion der Tasks auf physikalische Ereignisse Scheduling Machine: physikalisches Scheduling 130
11 Logische Ausführungszeit Port Port Logical Execution Time Logical Task Invocation Physical Start Suspend Resume Stop Motivation siehe 131
12 Kommunikation zwischen Tasks 132
13 Modes / Guards Um die Ausführung flexibel zu gestalten, bietet Giotto Modes und Guards an Guards: Boolsche Funktion, die über die Ausführung eines Tasks entscheidet (wird vor Start des Tasks aufgerufen) Mode: Menge von Tasks und Drivers die zeitgleich ausgeführ werden, es kann immer nur ein Mode aktiv sein. Nicht-harmonischer Moduswechsel (Unterbrechung eines laufenden Modes): Voraussetzung: [m]/ task = [m ]/ task m: Quellmodus, m : Zielmodus, [m]: Modusdauer m, task : Taskfrequenz Logische Ausführungszeit muss gleich sein Wechselmechanismus: = LCM { [m]/ task { task,t, ) Invokes[m], = [m ]-( - ) mit = n* LCM: least common multiple, : aktuelle Rundenzeit, : neue Rundenzeit in m, - : Zeit bis zum nächsten gleichzeitigen Beendigungspunkt Task 1: ω task1 =1 Task 2: ω task2 =3 Task 1: ω task1 =1 Task 3: ω task2 =2 π[m]=12 δ = 8 π[m ]=12 δ =? 133
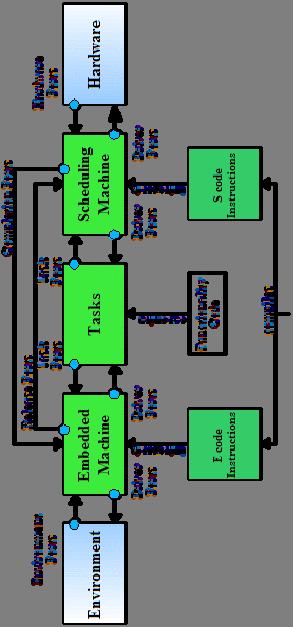
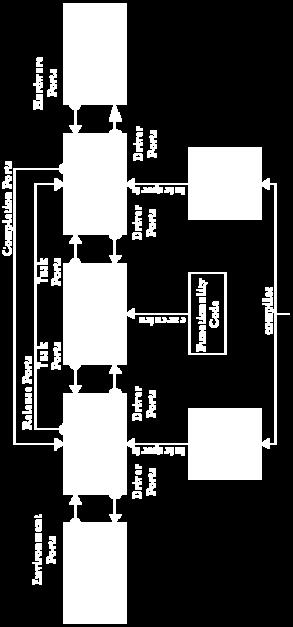
14 Ausführungsumgebung 134
15 Zusammenfassung Das Konzept der logischen Ausführungszeiten erlaubt eine Abstrahierung von der physikalischen Ausführungszeit und somit die Trennung von plattformunabhängigem Verhalten (Funktionalität und zeitl. Verhalten) und plattformabhängiger Realisierung (Scheduling, Kommunikation) Die Ausführung erfolgt über zwei virtuelle Maschinen: E-Machine: Interaktion mit der Umgebung (reaktiv) S-Machine: Interaktion mit der ausführenden Plattform (proaktiv), Vorteil: Schedule kann vorab berechnet werden Weitere Literaturhinweise: Henzinger et al.: Giotto: A time-triggered language für embedded programming, Proceedings of the IEEE, vol.91, no.1, pp , Jan 2003 Henzinger et al.: Schedule-Carrying Code, Proceedings of the Third International Conference on Embedded Software (EMSOFT),
Fakultät für Informatik der Technischen Universität München. Kapitel 3. Echtzeitsysteme Lehrstuhl Informatik VI Robotics and Embedded Systems WS 11/12
 Kapitel 3 Modellgetriebene Entwicklung von n (inkl. Werkzeuge) 71 Inhalt Fokus: Konzepte und Werkzeuge zur Modellierung und Generierung von Code für Echtzeit und eingebettete Systeme Motivation Grundsätzlicher
Kapitel 3 Modellgetriebene Entwicklung von n (inkl. Werkzeuge) 71 Inhalt Fokus: Konzepte und Werkzeuge zur Modellierung und Generierung von Code für Echtzeit und eingebettete Systeme Motivation Grundsätzlicher
Modell-basierte Entwicklung mit der Timing Definition Language (TDL)
") Modell-basierte Entwicklung mit der Timing Definition Language (TDL) Prof. Dr. Wolfgang Pree Univ. Salzburg Inhalt Motivation für einen Paradigmenwechsel bisher: zuerst Plattform, dann Software => Software
Modell-basierte Entwicklung mit der Timing Definition Language (TDL) Prof. Dr. Wolfgang Pree Univ. Salzburg Inhalt Motivation für einen Paradigmenwechsel bisher: zuerst Plattform, dann Software => Software
Modellierung von Echtzeitsystemen
 Modellierung von n Aktoren, Ausführungsmodelle Werkzeuge: Ptolemy 87 Ptolemy Das Ptolemy*-Projekt an der UC Berkeley untersucht verschiedene Modellierungsmethodiken für eingebettete Systeme mit einem Fokus
Modellierung von n Aktoren, Ausführungsmodelle Werkzeuge: Ptolemy 87 Ptolemy Das Ptolemy*-Projekt an der UC Berkeley untersucht verschiedene Modellierungsmethodiken für eingebettete Systeme mit einem Fokus
Example Ptolemy Model of Comp.: Synchronous Reactive
 Prinzip: Example Ptolemy Model of Comp.: Synchronous Reactive Annahme: unendlich schnelle Maschine Diskrete Ereignisse (DE) werden zyklisch verarbeitet (Ereignisse müssen nicht jede Runde eintreffen) Pro
Prinzip: Example Ptolemy Model of Comp.: Synchronous Reactive Annahme: unendlich schnelle Maschine Diskrete Ereignisse (DE) werden zyklisch verarbeitet (Ereignisse müssen nicht jede Runde eintreffen) Pro
Fakultät für Informatik der Technischen Universität München. Kapitel 2. Modellierung von Echtzeitsystemen und Werkzeuge
 Kapitel 2 Modellierung von n und Werkzeuge 39 Inhalt Motivation Grundsätzlicher Aufbau, Models of Computation Werkzeug Ptolemy Synchrone Sprachen (Esterel, Lustre) Reaktive Systeme: Werkzeuge Esterel Studio,
Kapitel 2 Modellierung von n und Werkzeuge 39 Inhalt Motivation Grundsätzlicher Aufbau, Models of Computation Werkzeug Ptolemy Synchrone Sprachen (Esterel, Lustre) Reaktive Systeme: Werkzeuge Esterel Studio,
Softwareentwicklung eingebetteter Systeme
 Xpert.press Softwareentwicklung eingebetteter Systeme Grundlagen, Modellierung, Qualitätssicherung Bearbeitet von Peter Scholz 1. Auflage 2005. Buch. xii, 232 S. Hardcover ISBN 978 3 540 23405 0 Format
Xpert.press Softwareentwicklung eingebetteter Systeme Grundlagen, Modellierung, Qualitätssicherung Bearbeitet von Peter Scholz 1. Auflage 2005. Buch. xii, 232 S. Hardcover ISBN 978 3 540 23405 0 Format
Uhren und Synchronisation
 Uhren und Synchronisation Synchronisation bei fehlerbehafteten Uhren 67 Problemstellung Die bisherigen Algorithmen basierten alle auf der Annahme von fehlerfreien Uhren. Im Folgenden werden Algorithmen
Uhren und Synchronisation Synchronisation bei fehlerbehafteten Uhren 67 Problemstellung Die bisherigen Algorithmen basierten alle auf der Annahme von fehlerfreien Uhren. Im Folgenden werden Algorithmen
An Overview of the Signal Clock Calculus
 An Overview of the Signal Clock Calculus, Jennifer Möwert Inhaltsverzeichnis Synchrone Programmiersprachen Clock Calculus Synchrone Paradigmen SLTS Clocks SIGNAL Definitionen Endochrony Bäume, Jennifer
An Overview of the Signal Clock Calculus, Jennifer Möwert Inhaltsverzeichnis Synchrone Programmiersprachen Clock Calculus Synchrone Paradigmen SLTS Clocks SIGNAL Definitionen Endochrony Bäume, Jennifer
Fakultät für Informatik der Technischen Universität München. Echtzeitsysteme Lehrstuhl Informatik VI Robotics and Embedded Systems.
 Lehrstuhl Informatik VI Robotics and Embedded Systems Eh Wintersemester 2010/2011 Prof. Dr. Alois Knoll, Dr. Christian Buckl TU München Lehrstuhl VI Robotics and Embedded Systems WS 10/11 1 : Organisation
Lehrstuhl Informatik VI Robotics and Embedded Systems Eh Wintersemester 2010/2011 Prof. Dr. Alois Knoll, Dr. Christian Buckl TU München Lehrstuhl VI Robotics and Embedded Systems WS 10/11 1 : Organisation
Kapitel 2. Fakultät für Informatik der Technischen Universität München. Echtzeitsysteme Lehrstuhl Informatik VI Robotics and Embedded Systems
 Kapitel 2 Modellierung von n und Werkzeuge WS 10/11 46 Inhalt Motivation Grundsätzlicher Aufbau, Modelle und Models of Computation Werkzeug Ptolemy Synchrone Sprachen (Esterel, Lustre) Reaktive Systeme:
Kapitel 2 Modellierung von n und Werkzeuge WS 10/11 46 Inhalt Motivation Grundsätzlicher Aufbau, Modelle und Models of Computation Werkzeug Ptolemy Synchrone Sprachen (Esterel, Lustre) Reaktive Systeme:
Software Engineering. 5. Architektur
 Software Engineering 5. Architektur Gliederung Vorlesung Einführung V-Modell XT Analyse und Anforderungsmanagement Benutzungsoberflächen Architektur Entwurf Entwurfsmuster Persistenz Implementierung Konfigurationsmanagement
Software Engineering 5. Architektur Gliederung Vorlesung Einführung V-Modell XT Analyse und Anforderungsmanagement Benutzungsoberflächen Architektur Entwurf Entwurfsmuster Persistenz Implementierung Konfigurationsmanagement
Diskrete Ereignissysteme. Spezielle Netzstrukturen- Übersicht. Beispiele zu speziellen Netzstrukturen. Petri-Netze und Zustandsautomaten
 Diskrete Ereignissysteme 4.4 Spezialisierungen von Petri Netzen Spezielle Netzstrukturen- Übersicht Ein S-T-Netz heisst Zustands-System gdw. gilt:. W(f) = für alle Kanten f F. 2. t = t = für alle Transitionen
Diskrete Ereignissysteme 4.4 Spezialisierungen von Petri Netzen Spezielle Netzstrukturen- Übersicht Ein S-T-Netz heisst Zustands-System gdw. gilt:. W(f) = für alle Kanten f F. 2. t = t = für alle Transitionen
EasyLab: Modell-basierte Software-Entwicklung für mechatronische Systeme
 EasyLab: Modell-basierte Software-Entwicklung für mechatronische Systeme Prof. Dr.-Ing. habil. Alois Knoll (k@tum.de) Lehrstuhl für Echtzeitsysteme und Robotik Institut für Informatik Technische Universität
EasyLab: Modell-basierte Software-Entwicklung für mechatronische Systeme Prof. Dr.-Ing. habil. Alois Knoll (k@tum.de) Lehrstuhl für Echtzeitsysteme und Robotik Institut für Informatik Technische Universität
FPGA vs. Mikrocontroller. Agenda
 FPGA vs. Mikrocontroller Name: Jan Becker Matrikelnummer: 546508 Agenda - Kurzvorstellung eines FPGAs - Komponenten eines FPGAs - Programmierung eines FPGAs - Kurzvorstellung eines Mikrocontrollers - Komponenten
FPGA vs. Mikrocontroller Name: Jan Becker Matrikelnummer: 546508 Agenda - Kurzvorstellung eines FPGAs - Komponenten eines FPGAs - Programmierung eines FPGAs - Kurzvorstellung eines Mikrocontrollers - Komponenten
Modellierung verteilter Systeme Grundlagen der Programm und Systementwicklung
 Modellierung verteilter Systeme Grundlagen der Programm und Systementwicklung Sommersemester 2012 Prof. Dr. Dr. h.c. Manfred Broy Unter Mitarbeit von Dr. M. Spichkova, J. Mund, P. Neubeck Lehrstuhl Software
Modellierung verteilter Systeme Grundlagen der Programm und Systementwicklung Sommersemester 2012 Prof. Dr. Dr. h.c. Manfred Broy Unter Mitarbeit von Dr. M. Spichkova, J. Mund, P. Neubeck Lehrstuhl Software
Electronic Design Automation (EDA) Spezifikation
 Spezifikation") Electronic Design Automation (EDA) Spezifikation Inhalte einer Spezifikation Beispielspezifikation Ampelsteuerung Formale Beschreibung Blockdiagramme... für die Ampel Zustandsübergangs-diagramme... für
Electronic Design Automation (EDA) Spezifikation Inhalte einer Spezifikation Beispielspezifikation Ampelsteuerung Formale Beschreibung Blockdiagramme... für die Ampel Zustandsübergangs-diagramme... für
EasyKit Eine allgemeine Methodik für die Entwicklung von Steuerungskomponenten
 EasyKit Eine allgemeine Methodik für die Entwicklung von Steuerungskomponenten Alois Knoll Lehrstuhl für Eingebettete Systeme und Robotik Fakultät für Informatik Technische Universität München 18. März
EasyKit Eine allgemeine Methodik für die Entwicklung von Steuerungskomponenten Alois Knoll Lehrstuhl für Eingebettete Systeme und Robotik Fakultät für Informatik Technische Universität München 18. März
1.4! Einführung. Systemmodellierung. Methoden und Werkzeuge
 Einführung. Vorbemerkungen und Überblick. Die elektronischen e des Fahrzeugs. Prozesse in der Fahrzeugentwicklung im Überblick,.4 Grundlagen. Steuerungs- und regelungstechnische e (Prof. Schumacher). Diskrete
Einführung. Vorbemerkungen und Überblick. Die elektronischen e des Fahrzeugs. Prozesse in der Fahrzeugentwicklung im Überblick,.4 Grundlagen. Steuerungs- und regelungstechnische e (Prof. Schumacher). Diskrete
Validierbare Architekturen für Industrielle Automatisierungssysteme
 Validierbare Architekturen für Industrielle Automatisierungssysteme Pro-Sign GmbH Barleben Lehrstuhl für Automatisierungstechnik, Martin Luther Universität Halle-Wittenberg ifak system GmbH Magdeburg Präsentiert
Validierbare Architekturen für Industrielle Automatisierungssysteme Pro-Sign GmbH Barleben Lehrstuhl für Automatisierungstechnik, Martin Luther Universität Halle-Wittenberg ifak system GmbH Magdeburg Präsentiert
Lab4PLC. Lab4Arduino. SPS Hersteller unabhängiger SPS Trainer
 SPS Hersteller unabhängiger SPS Trainer Industrieunabhängig / Anwendungsunabhängig Lab4Arduino Flexibel Individuell Innovativ 1. 2. 3. 4. Übungsmodell am Whiteboard visualisieren Magnetische Sensoren und
SPS Hersteller unabhängiger SPS Trainer Industrieunabhängig / Anwendungsunabhängig Lab4Arduino Flexibel Individuell Innovativ 1. 2. 3. 4. Übungsmodell am Whiteboard visualisieren Magnetische Sensoren und
Simon Barner Michael Geisinger Technische Universität München
 Simon Barner Michael Geisinger Technische Universität München Inhalte des Workshops 1. Entwicklungsprozess mit EasyKit 2. Hardware Überblick über EasyKit Starter Aufbau von Prototypen 3. Software Bedienung
Simon Barner Michael Geisinger Technische Universität München Inhalte des Workshops 1. Entwicklungsprozess mit EasyKit 2. Hardware Überblick über EasyKit Starter Aufbau von Prototypen 3. Software Bedienung
Grundlagen der Automatisierungstechnik für den Studiengang BEL 1. Semester
 für den Studiengang BEL 1. Semester 0. Grundlagen 0.1 Grundbegriffe~ 1 ~ 0.1.1 Definition des Begriffs Automatisierung Automatisierung ist Einsatz technischer Einrichtungen zum selbsttätigen Ablauf von
für den Studiengang BEL 1. Semester 0. Grundlagen 0.1 Grundbegriffe~ 1 ~ 0.1.1 Definition des Begriffs Automatisierung Automatisierung ist Einsatz technischer Einrichtungen zum selbsttätigen Ablauf von
Inhaltsverzeichnis Einführung und Überblick
 Inhaltsverzeichnis 1 Einführung und Überblick......................... 1 1.1 Das System Fahrer-Fahrzeug-Umwelt................. 2 1.1.1 Aufbau und Wirkungsweise elektronischer Systeme...... 3 1.1.2 Elektronische
Inhaltsverzeichnis 1 Einführung und Überblick......................... 1 1.1 Das System Fahrer-Fahrzeug-Umwelt................. 2 1.1.1 Aufbau und Wirkungsweise elektronischer Systeme...... 3 1.1.2 Elektronische
Analyse und Entwurf von Softwaresystemen mit der UML
 Analyse und Entwurf von Softwaresystemen mit der UML Bearbeitet von Horst A. Neumann 2. Auflage 2002. Buch. XVI, 480 S. Hardcover ISBN 978 3 446 22038 6 Format (B x L): 17,7 x 24,5 cm Gewicht: 1049 g Zu
Analyse und Entwurf von Softwaresystemen mit der UML Bearbeitet von Horst A. Neumann 2. Auflage 2002. Buch. XVI, 480 S. Hardcover ISBN 978 3 446 22038 6 Format (B x L): 17,7 x 24,5 cm Gewicht: 1049 g Zu
Prinzipen und Komponenten Eingebetteter Systeme (PKES) Sebastian Zug Arbeitsgruppe Eingebettete Systeme und Betriebssysteme
 Sebastian Zug Arbeitsgruppe Eingebettete Systeme und Betriebssysteme") 1 Vorlesung Prinzipen und Komponenten Eingebetteter Systeme (PKES) (2) Was ist ein eingebettetes Gerät? Sebastian Zug Arbeitsgruppe Eingebettete Systeme und Betriebssysteme 2 Veranstaltungslandkarte Fehlertoleranz,
1 Vorlesung Prinzipen und Komponenten Eingebetteter Systeme (PKES) (2) Was ist ein eingebettetes Gerät? Sebastian Zug Arbeitsgruppe Eingebettete Systeme und Betriebssysteme 2 Veranstaltungslandkarte Fehlertoleranz,
Die Integration zukünftiger In-Car Multimedia Systeme unter Verwendung von Virtualisierung und Multi-Core Plattformen
 Die Integration zukünftiger In-Car Multimedia Systeme unter Verwendung von Virtualisierung und Multi-Core Plattformen 0. November 0 Sergio Vergata, Andreas Knirsch, Joachim Wietzke Echtzeit 0 Agenda Motivation
Die Integration zukünftiger In-Car Multimedia Systeme unter Verwendung von Virtualisierung und Multi-Core Plattformen 0. November 0 Sergio Vergata, Andreas Knirsch, Joachim Wietzke Echtzeit 0 Agenda Motivation
Seminar: Multi-Core Architectures and Programming
 Seminar: Multi-Core Architectures and Programming Parallelisierung des Viola-Jones Algorithmus auf Tilera Hardware-Software-Co-Design Universität Erlangen-Nürnberg 1 Übersicht Einleitung Erste Versuche
Seminar: Multi-Core Architectures and Programming Parallelisierung des Viola-Jones Algorithmus auf Tilera Hardware-Software-Co-Design Universität Erlangen-Nürnberg 1 Übersicht Einleitung Erste Versuche
Kernprozess zur System- und Softwareentwicklung. Logische Systemarchitektur f 1. f 2 f 3. f 4 Funktion. Technische Systemarchitektur SG 1 SG 2 SG 3
 Systems Engineering Systems Engineering ist die gezielte Anwendung von wissenschaftlichen und technischen Ressourcen! zur Transformation eines operationellen Bedürfnisses in die Beschreibung einer Systemkonfiguration
Systems Engineering Systems Engineering ist die gezielte Anwendung von wissenschaftlichen und technischen Ressourcen! zur Transformation eines operationellen Bedürfnisses in die Beschreibung einer Systemkonfiguration
Microsoft.NET Framework & Component Object Model. ein Vortrag von Florian Steuber
 Microsoft.NET Framework & Component Object Model ein Vortrag von Florian Steuber Übersicht I..NET Framework 1. Was ist das.net Framework? 2. Das.NET Execution Model 3. Sprachunabhängigkeit, CTS und CLS
Microsoft.NET Framework & Component Object Model ein Vortrag von Florian Steuber Übersicht I..NET Framework 1. Was ist das.net Framework? 2. Das.NET Execution Model 3. Sprachunabhängigkeit, CTS und CLS
Leicht konfigurierbare Hardware-Abstraktionsschicht für flexible Automatisierung
 Leicht konfigurierbare Hardware-Abstraktionsschicht für flexible Automatisierung Einleitung Motivation Lösungsansatz Architektur Abstraktion Beispiel Echtzeit Fazit & Ausblick Ziele der Industrial Automation
Leicht konfigurierbare Hardware-Abstraktionsschicht für flexible Automatisierung Einleitung Motivation Lösungsansatz Architektur Abstraktion Beispiel Echtzeit Fazit & Ausblick Ziele der Industrial Automation
Virtuelle Inbetriebnahme. Digitalization Days 2017
 Virtuelle Inbetriebnahme Digitalization Days 2017 Frei verwendbar Siemens AG 2017 Realize innovation. Aktuelle maschinenbauliche Herausforderungen Ist dies»nur«eine Beladetür? Endschalter Sicherheitsrelais
Virtuelle Inbetriebnahme Digitalization Days 2017 Frei verwendbar Siemens AG 2017 Realize innovation. Aktuelle maschinenbauliche Herausforderungen Ist dies»nur«eine Beladetür? Endschalter Sicherheitsrelais
Unified Modelling Language
 Unified Modelling Language SEP 72 Software-Entwicklung Software-Entwicklung ist Prozess von Anforderung über Modellierungen zu fertigen Programmen Anforderungen oft informell gegeben fertige Programme
Unified Modelling Language SEP 72 Software-Entwicklung Software-Entwicklung ist Prozess von Anforderung über Modellierungen zu fertigen Programmen Anforderungen oft informell gegeben fertige Programme
Software Engineering in der Praxis
 Software Engineering in der Praxis Praktische Übungen Pinte, Spisländer FAU Erlangen-Nürnberg Objektorientiertes Design 1 / 17 Objektorientiertes Design Florin Pinte Marc Spisländer Lehrstuhl für Software
Software Engineering in der Praxis Praktische Übungen Pinte, Spisländer FAU Erlangen-Nürnberg Objektorientiertes Design 1 / 17 Objektorientiertes Design Florin Pinte Marc Spisländer Lehrstuhl für Software
Projekt Beispiele: HiL-Testsysteme
 Projekt Beispiele: HiL-Testsysteme Übersicht realisierte Projekte Übersicht Projektverlauf Spezifikation eines HIL-Systems Aufbau eines HIL-Systems Inbetriebnahme Testbetrieb Übersicht realisierte Projekte
Projekt Beispiele: HiL-Testsysteme Übersicht realisierte Projekte Übersicht Projektverlauf Spezifikation eines HIL-Systems Aufbau eines HIL-Systems Inbetriebnahme Testbetrieb Übersicht realisierte Projekte
UML (Unified Modelling Language) von Christian Bartl
 von Christian Bartl") UML (Unified Modelling Language) von Inhaltsverzeichnis Inhaltsverzeichnis... 2 1 UML Unified Modelling Language... 3 2 Diagrammtypen... 3 2.1 Aktivitätsdiagramm... 3 2.1.1 Notation... 4 2.1.2 Beispieldiagramm...
UML (Unified Modelling Language) von Inhaltsverzeichnis Inhaltsverzeichnis... 2 1 UML Unified Modelling Language... 3 2 Diagrammtypen... 3 2.1 Aktivitätsdiagramm... 3 2.1.1 Notation... 4 2.1.2 Beispieldiagramm...
Modellierung verteilter Systeme Grundlagen der Programm und Systementwicklung
 Modellierung verteilter Systeme Grundlagen der Programm und Systementwicklung Wintersemester 2009/10 Prof. Dr. Dr. h.c. Manfred Broy Unter Mitarbeit von Dr. K. Spies, Dr. M. Spichkova, L. Heinemann, P.
Modellierung verteilter Systeme Grundlagen der Programm und Systementwicklung Wintersemester 2009/10 Prof. Dr. Dr. h.c. Manfred Broy Unter Mitarbeit von Dr. K. Spies, Dr. M. Spichkova, L. Heinemann, P.
FPGA-basierte Automatisierungssysteme
 Fakultät Informatik Institut für Technische Informatik, Professur für VLSI-Entwurfssysteme, Diagnostik und Architektur FPGA-basierte Automatisierungssysteme Stephan Hensel Dresden, 05.12.2012 Gliederung
Fakultät Informatik Institut für Technische Informatik, Professur für VLSI-Entwurfssysteme, Diagnostik und Architektur FPGA-basierte Automatisierungssysteme Stephan Hensel Dresden, 05.12.2012 Gliederung
Prinzipien und Komponenten eingebetteter Systeme
 1 Prinzipen und Komponenten Eingebetteter Systeme (PKES) (2) Mikrocontroller I Sebastian Zug Arbeitsgruppe: Embedded Smart Systems 2 Veranstaltungslandkarte Fehlertoleranz, Softwareentwicklung Mikrocontroller
1 Prinzipen und Komponenten Eingebetteter Systeme (PKES) (2) Mikrocontroller I Sebastian Zug Arbeitsgruppe: Embedded Smart Systems 2 Veranstaltungslandkarte Fehlertoleranz, Softwareentwicklung Mikrocontroller
EasyKit - Innovative Entwicklungs- und Didaktikwerkzeuge für mechatronische Systeme
 EasyKit - Innovative Entwicklungs- und Didaktikwerkzeuge für mechatronische Systeme Dr.-Ing. Reinhard Pittschellis Festo Didactic GmbH & Co. KG Denkendorf pitt@de.festo.com www.festo-didactic.de Ausgangslage
EasyKit - Innovative Entwicklungs- und Didaktikwerkzeuge für mechatronische Systeme Dr.-Ing. Reinhard Pittschellis Festo Didactic GmbH & Co. KG Denkendorf pitt@de.festo.com www.festo-didactic.de Ausgangslage
Parallel Ein-/Ausgabe Box
 M1110 Parallel Ein-/Ausgabe Box Technische Beschreibung Eiserstraße 5 Telefon 056/709-0 15 Verl Telefax 056/70980 Datum 05.05.9 Version.1 Seite 1 von 17 Inhaltsverzeichnis 1. Funktionsbeschreibung Hardware....
M1110 Parallel Ein-/Ausgabe Box Technische Beschreibung Eiserstraße 5 Telefon 056/709-0 15 Verl Telefax 056/70980 Datum 05.05.9 Version.1 Seite 1 von 17 Inhaltsverzeichnis 1. Funktionsbeschreibung Hardware....
Software Engineering in der Praxis
 Software Engineering in der Praxis Praktische Übungen Pinte, Spisländer FAU Erlangen-Nürnberg Objektorientiertes Design 1 / 17 Objektorientiertes Design Florin Pinte Marc Spisländer Lehrstuhl für Software
Software Engineering in der Praxis Praktische Übungen Pinte, Spisländer FAU Erlangen-Nürnberg Objektorientiertes Design 1 / 17 Objektorientiertes Design Florin Pinte Marc Spisländer Lehrstuhl für Software
Objektorientierte Programmierung (OOP)
") orientierte Programmierung (OOP) 1. Motivation Die objektorientierte Sichtweise der Welt Als Motivation für die OOP sieht man sich am besten die reale Welt an: Die reale Welt besteht aus "en", z. B.: Gegenstände,
orientierte Programmierung (OOP) 1. Motivation Die objektorientierte Sichtweise der Welt Als Motivation für die OOP sieht man sich am besten die reale Welt an: Die reale Welt besteht aus "en", z. B.: Gegenstände,
J. Reinier van Kampenhout Robert Hilbrich Hans-Joachim Goltz. Workshop Echtzeit Fraunhofer FIRST
 Modellbasierte Generierung von statischen Schedules für sicherheitskritische, eingebettete Systeme mit Multicore Prozessoren und harten Echtzeitanforderungen J. Reinier van Kampenhout Robert Hilbrich Hans-Joachim
Modellbasierte Generierung von statischen Schedules für sicherheitskritische, eingebettete Systeme mit Multicore Prozessoren und harten Echtzeitanforderungen J. Reinier van Kampenhout Robert Hilbrich Hans-Joachim
Modellierung verteilter Systeme (Grundlagen der Programm- und Systementwicklung II)
") Modellierung verteilter Systeme (Grundlagen der Programm- und Systementwicklung II) 02 Grundlagen Dr. Sebastian Voss fortiss GmbH Kompetenzfeldleiter Model-based Systeme Engineering Themenübersicht - Gesamtvorlesung
Modellierung verteilter Systeme (Grundlagen der Programm- und Systementwicklung II) 02 Grundlagen Dr. Sebastian Voss fortiss GmbH Kompetenzfeldleiter Model-based Systeme Engineering Themenübersicht - Gesamtvorlesung
CANape Option Bypassing
 Produktinformation Inhaltsverzeichnis 1 Übersicht... 3 1.1 Einführung... 3 1.2 Die Vorteile im Überblick... 3 1.3 Anwendungsgebiete... 4 1.4 Systemvoraussetzung... 4 1.5 Weiterführende Informationen...
Produktinformation Inhaltsverzeichnis 1 Übersicht... 3 1.1 Einführung... 3 1.2 Die Vorteile im Überblick... 3 1.3 Anwendungsgebiete... 4 1.4 Systemvoraussetzung... 4 1.5 Weiterführende Informationen...
LabVIEW. 1.Einleitung
 LabVIEW Visuelle Programmierung vorgestellt am Beispiel der Programmierumgebung LabVIEW Referat: gehalten am 12.11.2001 Von: Roman Ulm und Günter Helbing 1. Einleitung 2. Sprachelemente von LabVIEW 3.
LabVIEW Visuelle Programmierung vorgestellt am Beispiel der Programmierumgebung LabVIEW Referat: gehalten am 12.11.2001 Von: Roman Ulm und Günter Helbing 1. Einleitung 2. Sprachelemente von LabVIEW 3.
CANape Option Bypassing
 Produktinformation Inhaltsverzeichnis 1 Übersicht... 3 1.1 Einführung... 3 1.2 Die Vorteile im Überblick... 3 1.3 Anwendungsgebiete... 4 1.4 Systemvoraussetzung... 4 1.5 Weiterführende Informationen...
Produktinformation Inhaltsverzeichnis 1 Übersicht... 3 1.1 Einführung... 3 1.2 Die Vorteile im Überblick... 3 1.3 Anwendungsgebiete... 4 1.4 Systemvoraussetzung... 4 1.5 Weiterführende Informationen...
Simulation in Verbindung mit Hardwarekomponenten
 Platzhalter für Bild, Bild auf Titelfolie hinter das Logo einsetzen Simulation in Verbindung mit Hardwarekomponenten Vorlesung: Simulation mechatronischer Systeme 2 Software-Simulationen Vorgehen: reales
Platzhalter für Bild, Bild auf Titelfolie hinter das Logo einsetzen Simulation in Verbindung mit Hardwarekomponenten Vorlesung: Simulation mechatronischer Systeme 2 Software-Simulationen Vorgehen: reales
OpenCL. Programmiersprachen im Multicore-Zeitalter. Tim Wiersdörfer
 OpenCL Programmiersprachen im Multicore-Zeitalter Tim Wiersdörfer Inhaltsverzeichnis 1. Was ist OpenCL 2. Entwicklung von OpenCL 3. OpenCL Modelle 1. Plattform-Modell 2. Ausführungs-Modell 3. Speicher-Modell
OpenCL Programmiersprachen im Multicore-Zeitalter Tim Wiersdörfer Inhaltsverzeichnis 1. Was ist OpenCL 2. Entwicklung von OpenCL 3. OpenCL Modelle 1. Plattform-Modell 2. Ausführungs-Modell 3. Speicher-Modell
Abschlussveranstaltung des BMBF-Verbundprojektes EasyKit 11. November 2009 EasyKit in der Praxis Rapid Prototyping bei Pumpensteuerungen
 Abschlussveranstaltung des BMBF-Verbundprojektes EasyKit 11. November 2009 EasyKit in der Praxis Rapid Prototyping bei Pumpensteuerungen Dr. Jochen Mades, KSB AG, P522 Leiter Mechatronische Entwicklung
Abschlussveranstaltung des BMBF-Verbundprojektes EasyKit 11. November 2009 EasyKit in der Praxis Rapid Prototyping bei Pumpensteuerungen Dr. Jochen Mades, KSB AG, P522 Leiter Mechatronische Entwicklung
Automatisierung kompletter Kühlanlagen mittels LabVIEW und PAC-Systemen
 Automatisierung kompletter Kühlanlagen mittels LabVIEW und PAC-Systemen "Auf der Grundlage des PAC-Konzeptes mit CompactFieldPoint und LabVIEW 8.6.1 wurde innerhalb kürzester Zeit eine voll funktionsfähige
Automatisierung kompletter Kühlanlagen mittels LabVIEW und PAC-Systemen "Auf der Grundlage des PAC-Konzeptes mit CompactFieldPoint und LabVIEW 8.6.1 wurde innerhalb kürzester Zeit eine voll funktionsfähige
Komponenten- HIL und Fahrzeug- HIL sind heute weit verbreitet. i.w. höhere Qualität der Fahrzeuge und Steuergeräte
 HIL Aktueller Status ECU Validierung mit HIL Technologie Komponenten- HIL und Fahrzeug- HIL sind heute weit verbreitet fester Bestandteil im Fahrzeug- Entwicklungsprozess Wertschöpfung und Nutzen für den
HIL Aktueller Status ECU Validierung mit HIL Technologie Komponenten- HIL und Fahrzeug- HIL sind heute weit verbreitet fester Bestandteil im Fahrzeug- Entwicklungsprozess Wertschöpfung und Nutzen für den
Jan Krückel, Industrie- und Gebäudeautomation / ABB Automation Day, Modul 40A Neuheiten der Industrie-Automation
 Jan Krückel, Industrie- und Gebäudeautomation / ABB Automation Day, 27.03.2012 Modul 40A Neuheiten der Industrie-Automation Neuheiten der Industrie-Automation Inhalt Steuerungsfamilie Ein- und Ausgangsmodule
Jan Krückel, Industrie- und Gebäudeautomation / ABB Automation Day, 27.03.2012 Modul 40A Neuheiten der Industrie-Automation Neuheiten der Industrie-Automation Inhalt Steuerungsfamilie Ein- und Ausgangsmodule
CMC 850. Das Schutzprüfgerät speziell für IEC Umgebungen
 CMC 850 Das Schutzprüfgerät speziell für IEC 61850-Umgebungen CMC 850 Schutzprüfung mit Sampled Values Das CMC 850 ist das erste Gerät weltweit, das speziell für das Prüfen in IEC 61850-Umgebungen konzipiert
CMC 850 Das Schutzprüfgerät speziell für IEC 61850-Umgebungen CMC 850 Schutzprüfung mit Sampled Values Das CMC 850 ist das erste Gerät weltweit, das speziell für das Prüfen in IEC 61850-Umgebungen konzipiert
Einführung. ECU-übergreifende Funktionen nehmen immer mehr zu! z.b. bei Fahrerassistenz-Systemen
 Einführung ECU-übergreifende Funktionen nehmen immer mehr zu! z.b. bei Fahrerassistenz-Systemen Einparken, Abstandsregeltempomat, unterstützt diesen Trend durch eine geeignete Entwicklungs-Methodik! Funktion
Einführung ECU-übergreifende Funktionen nehmen immer mehr zu! z.b. bei Fahrerassistenz-Systemen Einparken, Abstandsregeltempomat, unterstützt diesen Trend durch eine geeignete Entwicklungs-Methodik! Funktion
E Mikrocontroller-Programmierung
 E Mikrocontroller-Programmierung E Mikrocontroller-Programmierung E.1 Überblick Mikrocontroller-Umgebung Prozessor am Beispiel AVR-Mikrocontroller Speicher Peripherie Programmausführung Programm laden
E Mikrocontroller-Programmierung E Mikrocontroller-Programmierung E.1 Überblick Mikrocontroller-Umgebung Prozessor am Beispiel AVR-Mikrocontroller Speicher Peripherie Programmausführung Programm laden
Echtzeitprogrammierung und Echtzeitverhalten von Keil RTX. Frank Erdrich Semester AI 7
 Echtzeitprogrammierung und Echtzeitverhalten von Frank Erdrich Semester AI 7 Inhalt Einleitung Echtzeit und Echtzeitsysteme Echtzeitprogrammierung Real-Time Operating System Keil RTOS RTX Zusammenfassung
Echtzeitprogrammierung und Echtzeitverhalten von Frank Erdrich Semester AI 7 Inhalt Einleitung Echtzeit und Echtzeitsysteme Echtzeitprogrammierung Real-Time Operating System Keil RTOS RTX Zusammenfassung
Aufbau eines modernen Betriebssystems (Windows NT 5.0)
") Aufbau eines modernen Betriebssystems (Windows NT 5.0) Moritz Mühlenthaler 14.6.2004 Proseminar KVBK Gliederung 1.Das Designproblem a) Überblick b) Design Goals c) Möglichkeiten der Strukturierung 2. Umsetzung
Aufbau eines modernen Betriebssystems (Windows NT 5.0) Moritz Mühlenthaler 14.6.2004 Proseminar KVBK Gliederung 1.Das Designproblem a) Überblick b) Design Goals c) Möglichkeiten der Strukturierung 2. Umsetzung
Fakultät für Informatik der Technischen Universität München. Kapitel 3. Nebenläufigkeit
 Kapitel 3 Nebenläufigkeit 136 Inhalt Motivation Unterbrechungen (Interrupts) (Software-) Prozesse Threads Interprozesskommunikation (IPC) 137 Links: Literatur Maurice Herlihy, Nir Shavit, The Art of Multiprocessor
Kapitel 3 Nebenläufigkeit 136 Inhalt Motivation Unterbrechungen (Interrupts) (Software-) Prozesse Threads Interprozesskommunikation (IPC) 137 Links: Literatur Maurice Herlihy, Nir Shavit, The Art of Multiprocessor
Abschlusspräsentation - Bachelorarbeit
 Abschlusspräsentation - Bachelorarbeit Thema: Möglichkeiten der kombinierten Simulation in Multisim Matthias Ottmar Fakultät Elektrotechnik und Informationstechnik HTWG-Konstanz Gliederung Motivation,
Abschlusspräsentation - Bachelorarbeit Thema: Möglichkeiten der kombinierten Simulation in Multisim Matthias Ottmar Fakultät Elektrotechnik und Informationstechnik HTWG-Konstanz Gliederung Motivation,
Javakurs für Fortgeschrittene
 Javakurs für Fortgeschrittene Einheit 07: Nebenläufigkeit Lorenz Schauer Lehrstuhl für Mobile und Verteilte Systeme Heutige Agenda Einführung in die Nebenläufigkeit und Java Thread Konzept: Motivation
Javakurs für Fortgeschrittene Einheit 07: Nebenläufigkeit Lorenz Schauer Lehrstuhl für Mobile und Verteilte Systeme Heutige Agenda Einführung in die Nebenläufigkeit und Java Thread Konzept: Motivation
Grundlagen der Technischen Informatik. 13. Übung
 Grundlagen der Technischen Informatik 13. Übung Christian Knell Keine Garantie für Korrekt-/Vollständigkeit 13. Übungsblatt Themen Aufgabe 1: Aufgabe 2: Aufgabe 3: Aufgabe 4: Arithmetik VHDL - Funktionen
Grundlagen der Technischen Informatik 13. Übung Christian Knell Keine Garantie für Korrekt-/Vollständigkeit 13. Übungsblatt Themen Aufgabe 1: Aufgabe 2: Aufgabe 3: Aufgabe 4: Arithmetik VHDL - Funktionen
Architekturen, Werkzeuge und Laufzeitumgebungen für eingebettete Systeme
 Farbverlauf Architekturen, Werkzeuge und Laufzeitumgebungen für eingebettete Systeme Embedded Systems Christian Hochberger Professur Mikrorechner Fakultät Informatik Technische Universität Dresden Nötiges
Farbverlauf Architekturen, Werkzeuge und Laufzeitumgebungen für eingebettete Systeme Embedded Systems Christian Hochberger Professur Mikrorechner Fakultät Informatik Technische Universität Dresden Nötiges
Fehlertoleranz in eingebetteten Systemen
 Fehlertoleranz in eingebetteten Systemen Ausgewählte Kapitel eingebetteter Systeme (AKES) 19.07.2006 1 / 36 Was ist ein Fehler? Fehlerklassen Überblick Einführung Was ist ein Fehler? Fehlerklassen 2 /
Fehlertoleranz in eingebetteten Systemen Ausgewählte Kapitel eingebetteter Systeme (AKES) 19.07.2006 1 / 36 Was ist ein Fehler? Fehlerklassen Überblick Einführung Was ist ein Fehler? Fehlerklassen 2 /
Das zentrale Werkzeug für kürzere Entwicklungs- und Releasezyklen von software-basierten Kundenfunktionen in der Automobilindustrie
 Virtualisierung Das zentrale Werkzeug für kürzere Entwicklungs- und Releasezyklen von software-basierten Kundenfunktionen in der Automobilindustrie 3. Automobil Symposium Wildau Strenge, Alexander (CQPP),
Virtualisierung Das zentrale Werkzeug für kürzere Entwicklungs- und Releasezyklen von software-basierten Kundenfunktionen in der Automobilindustrie 3. Automobil Symposium Wildau Strenge, Alexander (CQPP),
PiXtend mit CODESYS Demo Projekt
 Beschreibung des PiXtend Demo Projektes Stand 18.08.2016, V1.3 Qube Solutions UG (haftungsbeschränkt) Arbachtalstr. 6, 72800 Eningen, Germany http://www.qube-solutions.de/ http://www.pixtend.de www.pixtend.de
Beschreibung des PiXtend Demo Projektes Stand 18.08.2016, V1.3 Qube Solutions UG (haftungsbeschränkt) Arbachtalstr. 6, 72800 Eningen, Germany http://www.qube-solutions.de/ http://www.pixtend.de www.pixtend.de
n 1. Der Begriff Informatik n 2. Syntax und Semantik von Programmiersprachen - 1 -
 n 1. Der Begriff Informatik n 2. Syntax und Semantik von Programmiersprachen I.2. I.2. Grundlagen von von Programmiersprachen. - 1 - 1. Der Begriff Informatik n "Informatik" = Kunstwort aus Information
n 1. Der Begriff Informatik n 2. Syntax und Semantik von Programmiersprachen I.2. I.2. Grundlagen von von Programmiersprachen. - 1 - 1. Der Begriff Informatik n "Informatik" = Kunstwort aus Information
High Performance Embedded Processors
 High Performance Embedded Processors Matthias Schwarz Hardware-Software-Co-Design Universität Erlangen-Nürnberg martin.rustler@e-technik.stud.uni-erlangen.de matthias.schwarz@e-technik.stud.uni-erlangen.de
High Performance Embedded Processors Matthias Schwarz Hardware-Software-Co-Design Universität Erlangen-Nürnberg martin.rustler@e-technik.stud.uni-erlangen.de matthias.schwarz@e-technik.stud.uni-erlangen.de
MCX08M Programmierbarer Regler
 Technische Broschüre MCX08M Programmierbarer Regler Der MCX08M ist mit oder ohne einem graphischen LCD Display erhältlich. Mit den verschiedensten Ein- und Ausgängen ausgestattet ist er in der Modulgröße
Technische Broschüre MCX08M Programmierbarer Regler Der MCX08M ist mit oder ohne einem graphischen LCD Display erhältlich. Mit den verschiedensten Ein- und Ausgängen ausgestattet ist er in der Modulgröße
EasyKit. Innovative Entwicklungsmethodik für mechatronische Systeme
 Innovative Entwicklungsmethodik für mechatronische Systeme Gerd Bauer efm-systems GmbH Dr. Reinhard Pittschellis Festo Didactic GmbH & Co. KG Anwendung Steuer- und Regelungstechnik Mechatronischer Pneumatikzylinder:
Innovative Entwicklungsmethodik für mechatronische Systeme Gerd Bauer efm-systems GmbH Dr. Reinhard Pittschellis Festo Didactic GmbH & Co. KG Anwendung Steuer- und Regelungstechnik Mechatronischer Pneumatikzylinder:
Virtuelle Produktion für industrielle Fertigungsanlagen mit spurgeführten Werkstückträgertransfersystemen. - eigene Vorarbeiten zum Antrag A3 -
 Virtuelle Produktion für industrielle Fertigungsanlagen mit spurgeführten Werkstückträgertransfersystemen - eigene Vorarbeiten zum Antrag A3 - Prof. Dr.-Ing. Jürgen Roßmann Dipl.-Inform Inform. Oliver
Virtuelle Produktion für industrielle Fertigungsanlagen mit spurgeführten Werkstückträgertransfersystemen - eigene Vorarbeiten zum Antrag A3 - Prof. Dr.-Ing. Jürgen Roßmann Dipl.-Inform Inform. Oliver
Übung zur Vorlesung Echtzeitsysteme
 Technische Universität München Fakultät für Informatik Forschungs- und Lehreinheit Informatik VI Übung zur Vorlesung Echtzeitsysteme Simon Barner barner@in.tum.de Irina Gaponova gaponova@in.tum.de Stephan
Technische Universität München Fakultät für Informatik Forschungs- und Lehreinheit Informatik VI Übung zur Vorlesung Echtzeitsysteme Simon Barner barner@in.tum.de Irina Gaponova gaponova@in.tum.de Stephan
Aktuelle Trends bei der Simulation mechatronischer Systeme
 Hauptseminar Technische Informationssysteme Dresden,18.06.2009 Gliederung Einleitung Modellierungssprache MODELICA Trends bei der Simulation VHDL-AMS Projekt MODELISAR Zusammenfassung Folie 2 Einleitung
Hauptseminar Technische Informationssysteme Dresden,18.06.2009 Gliederung Einleitung Modellierungssprache MODELICA Trends bei der Simulation VHDL-AMS Projekt MODELISAR Zusammenfassung Folie 2 Einleitung
Große Simulink-Modelle mit Bus Objects effizienter gestalten
 Große Simulink-Modelle mit Bus Objects effizienter gestalten Sebastian Bewersdorff Product Manager, TESIS DYNAware GmbH, München Matlab Expo 2015, 12.05.2015 TESIS DYNAware GmbH, www.tesis-dynaware.com
Große Simulink-Modelle mit Bus Objects effizienter gestalten Sebastian Bewersdorff Product Manager, TESIS DYNAware GmbH, München Matlab Expo 2015, 12.05.2015 TESIS DYNAware GmbH, www.tesis-dynaware.com
OSEK / OSEKtime - ein Vergleich
 OSEK / OSEKtime - ein Vergleich Hauptseminar WS 07/08 André Puschmann andre.puschmann@stud.tu-ilmenau.de Technische Universität Ilmenau Fakultät für Informatik und Automatisierung Fachgebiet Rechnerarchitektur
OSEK / OSEKtime - ein Vergleich Hauptseminar WS 07/08 André Puschmann andre.puschmann@stud.tu-ilmenau.de Technische Universität Ilmenau Fakultät für Informatik und Automatisierung Fachgebiet Rechnerarchitektur
Klausur. Betriebssysteme SS 2007
 Matrikelnummer: 9999999 Klausur FB Informatik und Mathematik Prof. R. Brause Betriebssysteme SS 2007 Vorname: Nachname: Matrikelnummer: Geburtsdatum: Studiengang: Bitte tragen Sie auf jeder Seite Ihre
Matrikelnummer: 9999999 Klausur FB Informatik und Mathematik Prof. R. Brause Betriebssysteme SS 2007 Vorname: Nachname: Matrikelnummer: Geburtsdatum: Studiengang: Bitte tragen Sie auf jeder Seite Ihre
, SS2012 Übungsgruppen: Do., Mi.,
 VU Technische Grundlagen der Informatik Übung 3: Schaltnete 83.579, SS202 Übungsgruppen: Do., 9.04. Mi., 25.04.202 Aufgab: Vereinfachung mittels KV-Diagramm Gegeben ist folgende Wahrheitstafel: e 0 Z Z
VU Technische Grundlagen der Informatik Übung 3: Schaltnete 83.579, SS202 Übungsgruppen: Do., 9.04. Mi., 25.04.202 Aufgab: Vereinfachung mittels KV-Diagramm Gegeben ist folgende Wahrheitstafel: e 0 Z Z
Entwicklung einer sensorlosen Motorregelung für Dentalbohrer nach IEC Dr. Michael Schwarz
 Entwicklung einer sensorlosen Motorregelung für Dentalbohrer nach IEC 62304 Dr. Michael Schwarz Agenda ITK Engineering AG Von der Idee bis zum Produkt Überblick und Motivation Herausforderungen sensorlose
Entwicklung einer sensorlosen Motorregelung für Dentalbohrer nach IEC 62304 Dr. Michael Schwarz Agenda ITK Engineering AG Von der Idee bis zum Produkt Überblick und Motivation Herausforderungen sensorlose
PiXtend mit CODESYS Demo Projekt
 Beschreibung des PiXtend Demo Projektes Stand 14.09.2015, V1.2 Qube Solutions UG (haftungsbeschränkt) Luitgardweg 18, D-71083 Herrenberg, Germany http://www.qube-solutions.de/ http://www.pixtend.de www.pixtend.de
Beschreibung des PiXtend Demo Projektes Stand 14.09.2015, V1.2 Qube Solutions UG (haftungsbeschränkt) Luitgardweg 18, D-71083 Herrenberg, Germany http://www.qube-solutions.de/ http://www.pixtend.de www.pixtend.de
Software Engineering
 Software Engineering Gustav Pomberger, Wolfgang Pree Architektur-Design und Prozessorientierung ISBN 3-446-22429-7 Weitere Informationen oder Bestellungen unter http://www.hanser.de/3-446-22429-7 sowie
Software Engineering Gustav Pomberger, Wolfgang Pree Architektur-Design und Prozessorientierung ISBN 3-446-22429-7 Weitere Informationen oder Bestellungen unter http://www.hanser.de/3-446-22429-7 sowie
Embedded CASE Tool Systems Embedded Control Solutions
 Embedded CASE Tool Systems Embedded Control Solutions ein Werkzeug mit allen Funktionen Was ist radcase? radcase ist ein Software-Tool zur objektorientierten Modellierung und Generierung technischer Applikationen.
Embedded CASE Tool Systems Embedded Control Solutions ein Werkzeug mit allen Funktionen Was ist radcase? radcase ist ein Software-Tool zur objektorientierten Modellierung und Generierung technischer Applikationen.
Prof. Dr. Uwe Brinkschulte. Lehrstuhl für Eingebettete Systeme
 Prof. Dr. Uwe Brinkschulte Lehrstuhl für Eingebettete Systeme brinks@es.cs.uni-frankfurt.de Robert-Mayer-Straße 11-15 Sekretariat: Linda Stapleton, Raum 211a stapleton@es.cs.uni-frankfurt.de 1 Forschungsgebiete
Prof. Dr. Uwe Brinkschulte Lehrstuhl für Eingebettete Systeme brinks@es.cs.uni-frankfurt.de Robert-Mayer-Straße 11-15 Sekretariat: Linda Stapleton, Raum 211a stapleton@es.cs.uni-frankfurt.de 1 Forschungsgebiete
Simulation digitaler Schaltungen auf GPUs
 Simulation digitaler Schaltungen auf GPUs Yohan Humbert TU Kaiserslautern Embedded Systems Group 1 Inhalt 1. Motivation und Geschichte 2. Simulation 3. Synchrones Verfahren 4. Asynchrones Verfahren 5.
Simulation digitaler Schaltungen auf GPUs Yohan Humbert TU Kaiserslautern Embedded Systems Group 1 Inhalt 1. Motivation und Geschichte 2. Simulation 3. Synchrones Verfahren 4. Asynchrones Verfahren 5.
IEC Windows- Programmiersoftware für CPS500
 IEC61131-3 Windows- Programmiersoftware für CPS500 16/13-089.231.01 esitron-electronic GmbH Ernst-Zimmermann-Str. 18 D-88045 Friedrichshafen Internet: www.esitron.de Telefon +49 (0) 7541/6000-0 Telefax
IEC61131-3 Windows- Programmiersoftware für CPS500 16/13-089.231.01 esitron-electronic GmbH Ernst-Zimmermann-Str. 18 D-88045 Friedrichshafen Internet: www.esitron.de Telefon +49 (0) 7541/6000-0 Telefax
Bounded Model Checking mit SystemC
 Bounded Model Checking mit SystemC S. Kinder, R. Drechsler, J. Peleska Universität Bremen {kinder,drechsle,jp}@informatik.uni-bremen.de 2 Überblick Motivation Formale Verifikation Äquivalenzvergleich Eigenschaftsprüfung
Bounded Model Checking mit SystemC S. Kinder, R. Drechsler, J. Peleska Universität Bremen {kinder,drechsle,jp}@informatik.uni-bremen.de 2 Überblick Motivation Formale Verifikation Äquivalenzvergleich Eigenschaftsprüfung
TensorFlow Open-Source Bibliothek für maschinelles Lernen. Matthias Täschner Seminar Deep Learning WS1718 Abteilung Datenbanken Universität Leipzig
 TensorFlow Open-Source Bibliothek für maschinelles Lernen Seminar Deep Learning WS1718 Abteilung Datenbanken Universität Leipzig Motivation Renaissance bei ML und KNN Forschung bei DNN fortgeschrittene
TensorFlow Open-Source Bibliothek für maschinelles Lernen Seminar Deep Learning WS1718 Abteilung Datenbanken Universität Leipzig Motivation Renaissance bei ML und KNN Forschung bei DNN fortgeschrittene
Absicherung von Automotive Software Funktionen
 GI Themenabend "Automotive" Absicherung von Automotive Software Funktionen 27.02.2013 Jürgen Schüling Überblick Berner & Mattner Gründung: 1979 Mitarbeiter: 400 Umsatz 2011: Standorte: Angebot: Branchen:
GI Themenabend "Automotive" Absicherung von Automotive Software Funktionen 27.02.2013 Jürgen Schüling Überblick Berner & Mattner Gründung: 1979 Mitarbeiter: 400 Umsatz 2011: Standorte: Angebot: Branchen:
1.4 Spezifikation. Inhalte einer. Spezifikation
 1.4 Spezifikation Spezifikation Inhalte einer Spezifikation Beispielspezifikation Ampelsteuerung Formale Beschreibung Blockdiagramme... für die Ampel Zustandsübergangsdiagramme... für die Ampel Task-Flow-Graphen...
1.4 Spezifikation Spezifikation Inhalte einer Spezifikation Beispielspezifikation Ampelsteuerung Formale Beschreibung Blockdiagramme... für die Ampel Zustandsübergangsdiagramme... für die Ampel Task-Flow-Graphen...
Intelligente Agenten
 Intelligente Agenten Melanie Kruse 22.06.2004 Seminar Komponentenorientierte Softwareentwicklung und Hypermedia FH Dortmund SS 2004 Was sind Agenten? Agentenforscher diskutieren seit längerem: jedoch keine
Intelligente Agenten Melanie Kruse 22.06.2004 Seminar Komponentenorientierte Softwareentwicklung und Hypermedia FH Dortmund SS 2004 Was sind Agenten? Agentenforscher diskutieren seit längerem: jedoch keine
Bessere Service-Modellierung durch Kombination von BPMN und SoaML. Nürnberg, 24. Februar 2011
 Bessere Service-Modellierung durch Kombination von BPMN und SoaML Nürnberg, 24. Februar 2011 Vorstellung Maria Deeg Project Manager, Leiterin der MID Akademie m.deeg@mid.de Studium Lehramt Gymnasium Mathematik
Bessere Service-Modellierung durch Kombination von BPMN und SoaML Nürnberg, 24. Februar 2011 Vorstellung Maria Deeg Project Manager, Leiterin der MID Akademie m.deeg@mid.de Studium Lehramt Gymnasium Mathematik
So testen Sie ein selbstorganisiertes System
 GI TAV 37 A Framework for Testing Self-organisation Algorithms Benedikt Eberhardinger, Gerrit Anders, Hella Seebach, Florian Siefert und Wolfgang Reif Ausbau erneuerbarer Energien in Bayern Offenheit:
GI TAV 37 A Framework for Testing Self-organisation Algorithms Benedikt Eberhardinger, Gerrit Anders, Hella Seebach, Florian Siefert und Wolfgang Reif Ausbau erneuerbarer Energien in Bayern Offenheit:
HW/SW CODESIGN. Echtzeitverhalten. Mehmet Ozgan 0526530. 17. November 2015
 HW/SW CODESIGN Echtzeitverhalten 17. November 2015 Mehmet Ozgan 0526530 ÜBERBLICK 1. Echtzeitsysteme 2. Hardware im Zeitbereich 3. Software im Zeitbereich 2 ECHTZEITSYSTEME REAL-TIME SYSTEM Ein Echtzeitsystem
HW/SW CODESIGN Echtzeitverhalten 17. November 2015 Mehmet Ozgan 0526530 ÜBERBLICK 1. Echtzeitsysteme 2. Hardware im Zeitbereich 3. Software im Zeitbereich 2 ECHTZEITSYSTEME REAL-TIME SYSTEM Ein Echtzeitsystem
Jochen Ludewig Horst Lichter. Software Engineering. Grundlagen, Menschen, Prozesse, Techniken. dpunkt.verlag
 Jochen Ludewig Horst Lichter Software Engineering Grundlagen, Menschen, Prozesse, Techniken dpunkt.verlag Inhaltsverzeichnis 1 Modelle und Modellierung 1.1 Modelle, die uns umgeben 1.2 Modelltheorie 1.3
Jochen Ludewig Horst Lichter Software Engineering Grundlagen, Menschen, Prozesse, Techniken dpunkt.verlag Inhaltsverzeichnis 1 Modelle und Modellierung 1.1 Modelle, die uns umgeben 1.2 Modelltheorie 1.3
Obj ektorientierte Systemanalyse
 Sally Shlaer Stephen J. Mellor Obj ektorientierte Systemanalyse Ein Modell der Welt in Daten h HANSER I Eine Coedition der Verlage Carl Hanser und Prentice-Hall International IX Warum Daten-Modellierung?
Sally Shlaer Stephen J. Mellor Obj ektorientierte Systemanalyse Ein Modell der Welt in Daten h HANSER I Eine Coedition der Verlage Carl Hanser und Prentice-Hall International IX Warum Daten-Modellierung?
Vertiefungsrichtung Rechnerarchitektur
 srichtung () ( für ) Prof. Dietmar Fey Ziele der srichtung RA Vertiefen des Verständnis vom Aufbau, Funktionsweise von Rechnern und Prozessoren Modellierung und Entwurf von Rechnern und Prozessoren ()
srichtung () ( für ) Prof. Dietmar Fey Ziele der srichtung RA Vertiefen des Verständnis vom Aufbau, Funktionsweise von Rechnern und Prozessoren Modellierung und Entwurf von Rechnern und Prozessoren ()
PiXtend mit CODESYS Demo Projekt
 Beschreibung des PiXtend Demo Projektes Stand 17.12.2014, V1.00 Qube Solutions UG (haftungsbeschränkt) Luitgardweg 18, D-71083 Herrenberg http://www.qube-solutions.de/ http://www.pixtend.de www.pixtend.de
Beschreibung des PiXtend Demo Projektes Stand 17.12.2014, V1.00 Qube Solutions UG (haftungsbeschränkt) Luitgardweg 18, D-71083 Herrenberg http://www.qube-solutions.de/ http://www.pixtend.de www.pixtend.de
Paul Molitor und Jörg Ritter VHDL. Eine Einführung. ein Imprint von Pearson Education
 Paul Molitor und Jörg Ritter VHDL Eine Einführung ein Imprint von Pearson Education München Boston San Francisco Harlow, England Don Mills, Ontario Sydney Mexico City Madrid Amsterdam Inhaltsverzeichnis
Paul Molitor und Jörg Ritter VHDL Eine Einführung ein Imprint von Pearson Education München Boston San Francisco Harlow, England Don Mills, Ontario Sydney Mexico City Madrid Amsterdam Inhaltsverzeichnis
Methode zur Entwicklung sicherheitskritischer eingebetteter Systeme mittels deterministischer UML-Modelle
 Methode zur Entwicklung sicherheitskritischer eingebetteter Systeme mittels deterministischer UML-Modelle Workshop "Entwicklung zuverlässiger Software-Systeme" MSc Dipl.- Ing. Zamira Daw Regensburg, 18.
Methode zur Entwicklung sicherheitskritischer eingebetteter Systeme mittels deterministischer UML-Modelle Workshop "Entwicklung zuverlässiger Software-Systeme" MSc Dipl.- Ing. Zamira Daw Regensburg, 18.
Systemkonzept eines modularen HiL-Systems für modellbasierte Funktionsentwicklung fahrzeugmechatronischer Systeme
 Systemkonzept eines modularen HiL-Systems für modellbasierte Funktionsentwicklung fahrzeugmechatronischer Systeme Workshop der ASIM/GI-Fachgruppen, 09./10.03.2017, Ulm Prof. Dr.-Ing. X. Liu-Henke M.Eng.
Systemkonzept eines modularen HiL-Systems für modellbasierte Funktionsentwicklung fahrzeugmechatronischer Systeme Workshop der ASIM/GI-Fachgruppen, 09./10.03.2017, Ulm Prof. Dr.-Ing. X. Liu-Henke M.Eng.
LTL und Spin. Stefan Radomski
 LTL und Spin Stefan Radomski sr@oop.info Gliederung Wiederholung Grundlagen Vorstellung LTL Syntax Semantik Beispiele Model Checking mit Spin Fallbeispiele Einführung in Promela Vorführung Zusammenfassung
LTL und Spin Stefan Radomski sr@oop.info Gliederung Wiederholung Grundlagen Vorstellung LTL Syntax Semantik Beispiele Model Checking mit Spin Fallbeispiele Einführung in Promela Vorführung Zusammenfassung