Piezoelektrische Aktoren und ihr Anwendungspotenzial
|
|
|
- Günter Rothbauer
- vor 8 Jahren
- Abrufe
Transkript
1 Piezoelektrische Aktoren und ihr Anwendungspotenzial Vortrag an der ETH Zürich am Dr. Jürgen Maas Research Electronics and Mechatronics Motion Control & Comfort (REM/A) Phone: +49 (0)
 juergen.maas@daimlerchrysler.")
2 Piezoelektrische Aktoren Gliederung Piezoelektrische Energiekonversion Einteilung und Beispiele piezoelektrischer Aktoren Piezomotoren Ultraschall-Wanderwellenmotor Modellierung und Regelung von Wanderwellenantrieben Applikationsbeispiele und Übertragbarkeit der hergeleiteten Konzepte 2

3 Piezoelektrische Energiekonversion Piezoelektrischer Effekt (Brüder Curie, 1880): elektromechanische Wechselwirkung zwischen dem mechanischen und elektrischen Zustand in Kristallen es wird unterscheiden in: - direkten piezoelektrischen Effekt: mechanische pannung induziert Ladungsverschiebung im Kristall (ensoren) - indirekten piezoelektrischen Effekt: äußeres Feld (Ladung) verursacht mechanische Verformung des Kristalls (Aktoren) Piezo-Aktuatoren: nutzen inversen piezoelektrischer Effekt beinhalten als piezoelektrischen Werkstoff überwiegend Keramiken auf Basis von Blei-Zirkonat-Titan verwenden sowohl den Quereffekt (d 31 ) als auch Längs- (d 33 ) weisen im Vergleich zu elektromagnetischen Aktoren hohe Kraftdichte auf werden in verschiedenen Bauformen ausgeführt 3
 als auch Längs- (d 33 ) weisen im Vergleich zu elektromagnetischen Aktoren hohe Kraftdichte auf werden in verschiedenen Bauformen")
4 Piezoelektrische Energiekonversion Lineare Piezogleichung: Piezoaktor (chwingungssystem): mit ( ): Elektrische Ersatzanordnung: 4
: mit ( ):")
5 Piezoelektrische Aktoren Einteilung und Beispiele Piezo-Transformatoren Ultraschallbearbeitung Positioniersysteme (nm-bereich) Piezo-Aktuator-Antriebe einmalig ausgeführte tellbewegung (One-troke-Aktoren / tapelelemente mit und ohne Wegübersetzung) Piezo-Resonator-Antriebe Anregung resonanter chwingungen durch piezokeramische Aktoren Piezomotoren Aktive chwingungsdämpfung Piezoelektrische Ventile 5

6 Applikationsbeispiel zur aktiven chwingungsund Geräuschdämpfung BK117 Quelle: EAD ervoklappe EAD EAD ervoklappe ervoklappe Quelle: EAD 6

7 Applikationsbeispiele für One-troke-Aktoren Piezoelektrisches Einspritzsystem Bosch Piezo-teuerventil für adaptive Fahrwerksdämpfung 7

8 Ultraschall-Wanderwellenmotor (WWM) AWM-90 n 0 = 200 min -1 M max = 5 Nm P max = 50 W 8
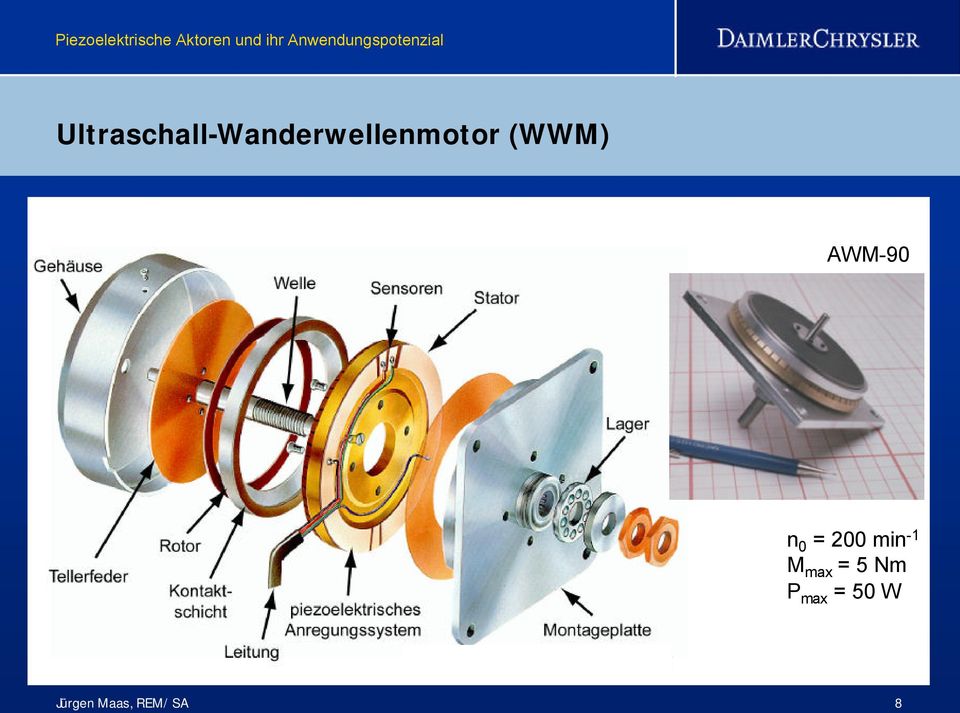
9 Funktionsprinzip des WWM Vorteile: Kompakte Bauform, hohe Drehmomentdichte Hohes Drehmoment bei niedriger Drehzahl Niedrige EM-Emission / Betrieb im magn. Feld Kontaktbereich zwischen tator und Rotor auf tatoroberseite λ 4 λ Anregesystem 1 Anregesystem 2 (inus-mode) (Kosinus-Mode) Nachteile: Geringer Wirkungsgrad (Reibungsverluste) eingeschränkter Betrieb (Wärmeabführung) Hoher Aufwand für tromrichter und Regelung (zweisträngiger peisung im Ultraschallbereich) ensorelement 1 ensorelement 2 tarke Temperaturabhängigkeit erfordert grundsätzlich geregelten Betrieb des Aktors 9
 eingeschränkter Betrieb (Wärmeabführung) Hoher Aufwand für tromrichter und Regelung (zweisträngiger")
10 Applikationsbeispiel für WWM -- Direktantrieb 10

11 Applikationsbeispiel für WWM -- Geräuscharmut AMO steering wheel adjuster im Low-Cost-Bereich zu kostenintensiv Applikationspotential beruht auf Charakteristika 11

12 WWM-Funktionsmodule in Blockdarstellung Entwurf einer modellgestützten Regelung für WWM: Modellierung des Kontaktvorgangs Konzept zur Führung der Biegewelle und peisung des Motors Modellierung des dynamischen Gesamtsystems Modellgestützter Entwurf der Regelung Experimentelle Validierung Applikationsbeispiele und Übertragbarkeit der hergeleiteten Konzepte 12

13 Ellipsenbewegung der Oberflächenpunkte ϕ m = 90 ŵ 1 ŵ 2 = 1 (reine Wanderwelle) 13
")
14 Ellipsenbewegung der Oberflächenpunkte ϕ m = 90 ŵ 1 ŵ 2 1 (Amplitudenabweichung) ϕ m 90 ŵ 1 ŵ 2 = 1 (Phasenabweichung) 14

15 tator-rotor-kontaktmodell F N n, v R Axialkraft und Drehmoment: c N τ antr τ brems w R = ŵ cos kx 0 x 0 F Rz = nb px ()x d x 0 wx ( ) x Ellipse x 0 M M = r w nb τ( x) dx x 0 ρ v R x c ρ v t x ( ) x Axiale und tangentiale Rückwirkungskraft: ρ τ( x) x sl x 0 x c 0 x sr x 0 antreibende Zone bremsende Zone x F dn F + = F d1 d = F dt F d2 15

16 Drehzahl-Drehmoment-Verhalten des WWM Äquivalenz bei Amplituden-Phasen-Verstimmung Identisches Drehzahl- Drehmoment-Verhalten bei: ŵ2 1 + ŵ = 2 ŵ 2 = konstant und 1 ŵ rel ŵ rel mit 2 P1 P2 = sin ϕ m P sin ϕ m P1 ŵ ŵ 2 ŵ 1 rel = = ŵ 2 ŵ 2 ŵ 16

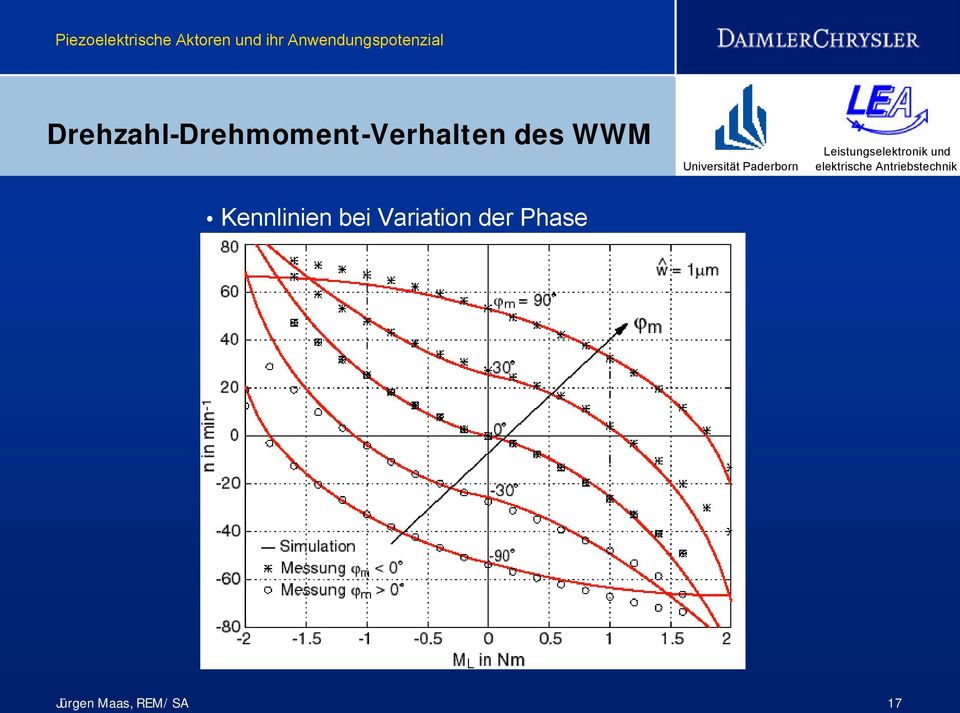
17 Drehzahl-Drehmoment-Verhalten des WWM Kennlinien bei Variation der Phase 17
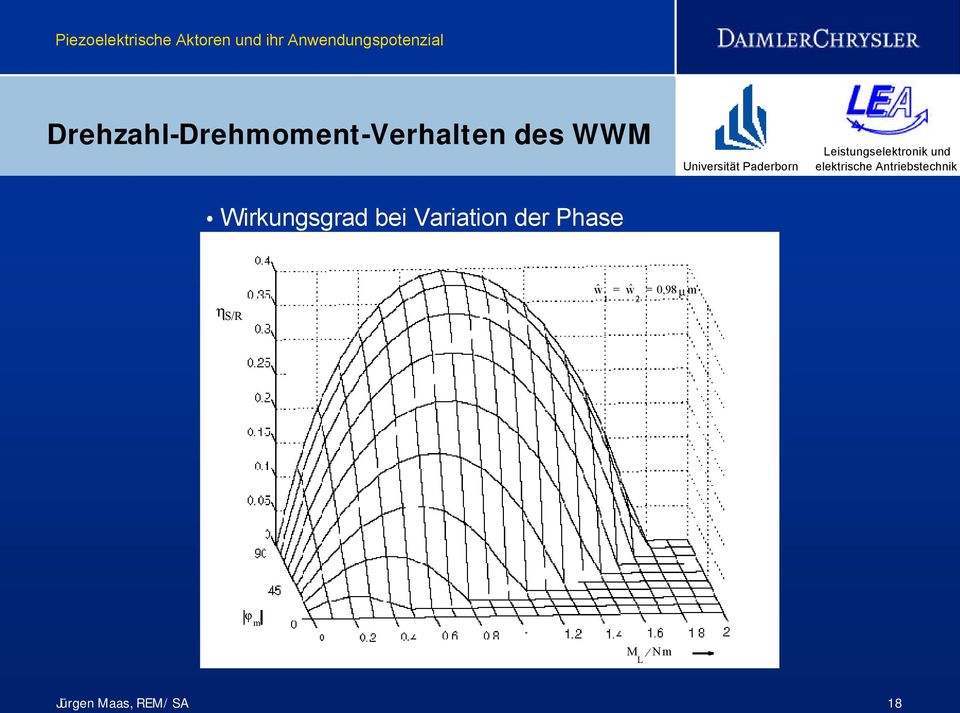
18 Drehzahl-Drehmoment-Verhalten des WWM Wirkungsgrad bei Variation der Phase ŵ = ŵ = 0,98 µm 1 2 η /R ϕ m M L Nm 18
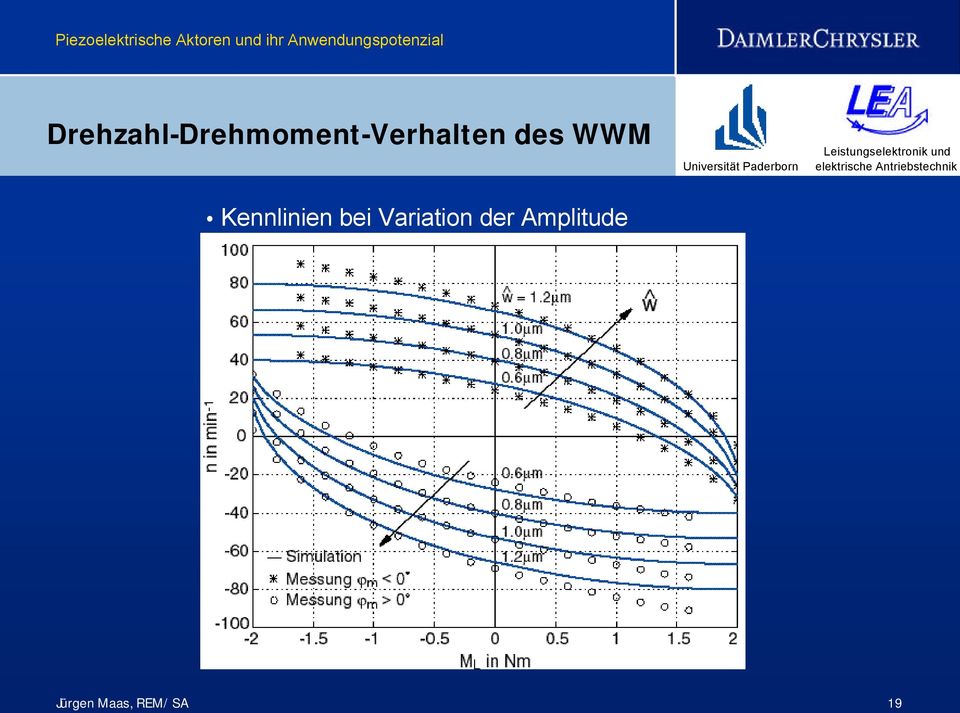
19 Drehzahl-Drehmoment-Verhalten des WWM Kennlinien bei Variation der Amplitude 19
20 Optimierte Kontaktkraftübertragung Konzept zur Führung der Biegewelle 1. Amplitudendifferenz stets zu null regeln: ŵ rel = 0 2. Amplitudensteuerung im oberen Drehzahl-Drehmoment-Bereich: ŵ min ŵ ŵ max mit ϕ m = Phasensteuerung im unteren Drehzahl-Drehmoment-Bereich: 90 ϕ m 90 mit ŵ min 20

21 Konzept zur Motorspeisung Zweisträngiger Resonanz-tromrichter mit WWM 21
22 Konzept zur Motorspeisung Messung am tromrichter mit WWM u Cp1 2u wr1 200V div i Ls1 0,8A div β 1 ϕ elek 2u wr2 β 2 u Cp V div i Ls2 0,8A div 1 f 5 µs div 22
23 imulationsmodell des WWM mit R 23
24 imulationsmodell des Einschwingvorgangs ystemdynamik ist durch chwebungen der Ultraschallschwingungen charakterisiert Reglersynthese erfordert Modell zur Beschreibung der Grundschwingungen und zeitveränderlichen Gleichanteile 24
25 25 Piezoelektrische Aktoren und ihr Anwendungspotenzial Dynamisches Mittelwertmodell Dynamisches Mittelwertmodell eines tromrichterstrangs Zustandsgleichung des Ultraschallmodells: + = w u C R A C L A L u i C R C L L R u i dt d wr P P P Ls P P P Ls Beschreibungsfunktion des Wechselrichters: + + = 2 sin 2 cos 2 sin 4,max ˆ β β ϕ β ϕ π wr u d wrc wrs üu u u ( ) ( ) ( ) ) cos( ) sin( t t u t t u t u wrc wrs wr ω ω + Approximation der Ultraschallschwingungen: ( ) ( ) ( ) ) cos( ) sin( t t u t t u t u C ω ω + t u dt du t u dt du dt du C C ω ω ω ω cos( ) sin( ' + +
26 26 Piezoelektrische Aktoren und ihr Anwendungspotenzial Zustandsgleichung des Mittelwertmodells: Dynamisches Mittelwertmodell eines tromrichterstrangs + = C WC W P P P P P P C C P P P P P P C C w w u u C R A C R A C L A L C L A L u u i i C R C C R C L L R L L R u u i i dt d ω ω ω ω Dynamisches Mittelwertmodell
27 Vergleich Ultraschall- vs. Mittelwertmodell Eigenschaften des Mittelwertmodells: Methode liefert die Hüllkurve der hochfrequenten Ultraschwingungen zeitveränderliche Gleichanteile charakterisieren die Kräfte der Rotordynamik imulation wird beträchtlich beschleunigt Erkenntnisse für die Reglersynthese: methodischer Ansatz ist prädestiniert für tromrichterstellglied kaskadierte Regelung ist zweckmäßig für elektromechanische chwingkreise aufgrund des Dynamikunterschieds 27
28 Übertragungsverhalten der chwingsysteme chematische Darstellung der Eigenwertverschiebung durch Mittelwertmodellierung dominant G ( s jω ) G( s + jω ) G, G ± H K 28
29 Übertragungsverhalten der chwingsysteme prungantwort eines tromrichterstrangs Mehrgrößenstrecke u wrs = σ ( t) 50V 29
30 Regelungskonzept für ein Resonanzsystem Vektorregelung in kartesischen Koordinaten 30
31 Regelungskonzept für ein Resonanzsystem prungantwort der pannungsregelung 31
32 pannungs-biegewellen-regelung 32
33 pannungs-biegewellen-regelung 33
34 34 Piezoelektrische Aktoren und ihr Anwendungspotenzial Kippeffekt bei Wanderwellenmotoren ( ) a w w j G m m ˆ ˆ 4 ) ˆ) ( ( = + = ω δ ω ω ω Nichtlineare Resonanzkennlinie ( ) a w w j G m m ˆ ˆ 4 ) ˆ) ( ( = + = ω δ ω ω ω (nichtlineare Resonanzkennlinie)
35 Kippeffekt bei Wanderwellenmotoren tabilisierung durch Biegewellenregelung 35
36 Optimierungspotential bei Resonanzbetrieb pannungsbedarf des Wanderwellenmotors Resonanzbetrieb senkt den pannungsbedarf beträchtlich Verringerung der tromrichter- und Keramikverluste 36
37 Führungsverhalten der Biegewellenregelung 37
38 Konzept für drehzahlgeregelten Antrieb Näherungsweise lineare Verhältnisse von M * zu M M bei Verwendung ~ eines inversen Kontaktmodells N -1 zur Kompensation der Nichtlinearität N drehmomentgesteuerter Betrieb möglich Entwurf eines linearen Drehzahlreglers wie bei klassischen elektrischen Antrieben 38
39 Modellgestützte Regelung für Ultraschall- Wanderwellenantriebe 39
40 Modellgestützte Regelung für Ultraschall- Wanderwellenantriebe Drehzahl-Drehmoment-Kennlinien 40
41 Modellgestützte Regelung für Ultraschall- Wanderwellenantriebe ollwertrechner / Inverses Kontaktmodell 41
42 Messungen am drehzahlgeregelten Antrieb Führungsverhalten der Drehzahlregelung 42
43 Geregelter Ultraschall-Wanderwellenantrieb Eigenschaften des Wanderwellenmotors: drehmomentstark, kompakt und geräuscharm erfordert einen angepassten tromrichter und ggf. eine aufwendige Regeleinrichtung Eigenschaften der zu regelnden trecke: zwei ausgeprägte, veränderliche Resonanzsysteme Instabilität im gesteuerten Betrieb Nichtlinearität bei Drehmomentbildung 43
44 Geregelter Ultraschall-Wanderwellenantrieb Modellgestütztes Regelungskonzept: Biegewellenregelung vermeidet Kippeffekt Adaption der chaltfrequenz reduziert Verluste kombinierte Amplituden-/Phasensteuerung optimiert Kontaktkraftübertragung inverses Kontaktmodell linearisiert Drehmoment-Führungsverhalten entworfene Drehzahlregelung zeigt hochdynamische Eigenschaften 44
45 Applikationen: Aktiver Handkraftaktor Active-Control-tick (Force-Feedback-Actuator) - drehmomentgesteuerter Betrieb nach vorgebbarer Kraftkennlinie mögliche Anwendung z.b. in der Luftfahrt: 45
46 Applikationen: Gelenkantrieb für Roboter Roboterhandgelenk auf Basis eines WWM (EAD) EAD robot hand joint 35 Nm peak AWM with gear & CAN interface 46
47 Applikationen: High power piezoelectric motor (HPM) Pamela (EUREKA) Aktor von agem Funktionsprinzip: agem (F) rotor disk oscillator axial piezo tang. piezo fixed to stator anvisierte Anwendung: Wirkleistung: 20 kw Blindleistung: 80 kvar mech. Leistung: 4 kw Drehmoment: 500 Nm Drehzahl: 80 min pannung: 540 V Betriebsfrequenz: 19-21kHz 47
48 Übertragung der Konzepte auf einsträngige Piezo-Resonator-Antriebe Anwendungen in der Ultraschallbearbeitung: z.b. Ultraschall-Messer auf Piezobasis (Projekt an ) C. Kauczor, et. al.; Actuator 2002, Bremen 48
49 Vergleich zu konventionellen Aktoren Piezoelektrische Aktoren vergleichsweise hohe Kraftdichten bei niedriger Geschwindigkeit - Direktantrieb - neue Möglichkeiten der mechanischen Adaption/Integration dynamisch, präzise, kompakt, geräuscharm erfordern tromrichter - induktive Entkopplung bei spannungseinprägenden Netzten - hohe Blindleistungsaufnahme vorrangige Einsatzgebiete - tellsystem zur Präzisionspositionierung - Ultraschallbearbeitung - Nischenprodukt aufgrund besonderer Eigenschaften kostenintensiv im Vergleich zu konventionellen Aktoren 49
Piezo-Ultraschallmotoren in Mikropositionsverstellern. Autor: Marc Thelen Seite: 1
 Piezo-Ultraschallmotoren in Mikropositionsverstellern Autor: Marc Thelen Seite: 1 Firmenüberblick Gegründet 1970 Firmensitz in Karlsruhe 500 Mitarbeiter weltweit Spezialisiert auf Feinstpositionierung
Piezo-Ultraschallmotoren in Mikropositionsverstellern Autor: Marc Thelen Seite: 1 Firmenüberblick Gegründet 1970 Firmensitz in Karlsruhe 500 Mitarbeiter weltweit Spezialisiert auf Feinstpositionierung
Komplexpraktikum Elektrotechnik - Elektrische Antriebe. Umrichtergespeister Drehstromantrieb
 April 2012 Komplexpraktikum Elektrotechnik - Elektrische Antriebe Umrichtergespeister Drehstromantrieb für tudiengang CT/AT, Fakultät ET 1. Versuchsziel ie lernen das stationäre Betriebsverhalten eines
April 2012 Komplexpraktikum Elektrotechnik - Elektrische Antriebe Umrichtergespeister Drehstromantrieb für tudiengang CT/AT, Fakultät ET 1. Versuchsziel ie lernen das stationäre Betriebsverhalten eines
Inhaltsverzeichnis. Rainer Hagl. Elektrische Antriebstechnik. ISBN (Buch): ISBN (E-Book):
: ISBN (E-Book):") Inhaltsverzeichnis Rainer Hagl Elektrische Antriebstechnik ISBN (Buch): 978-3-446-43350-2 ISBN (E-Book): 978-3-446-43378-6 Weitere Informationen oder Bestellungen unter http://www.hanser-fachbuch.de/978-3-446-43350-2
Inhaltsverzeichnis Rainer Hagl Elektrische Antriebstechnik ISBN (Buch): 978-3-446-43350-2 ISBN (E-Book): 978-3-446-43378-6 Weitere Informationen oder Bestellungen unter http://www.hanser-fachbuch.de/978-3-446-43350-2
Jan Krückel und Uwe Przywecki, ABB Schweiz AG, Industrieautomation / ABB Automation & Power World 2013 Effiziente Antriebssysteme Eine Klasse für
 Jan Krückel und Uwe Przywecki, ABB Schweiz AG, Industrieautomation / ABB Automation & Power World 2013 Effiziente Antriebssysteme Eine Klasse für sich Agenda Energieeffizienz und Technologien Motoren Frequenzumrichter
Jan Krückel und Uwe Przywecki, ABB Schweiz AG, Industrieautomation / ABB Automation & Power World 2013 Effiziente Antriebssysteme Eine Klasse für sich Agenda Energieeffizienz und Technologien Motoren Frequenzumrichter
Linearaktuatoren. Typen Anwendungsgebiete. Berechnungen Probleme 1-16
 Typen Anwendungsgebiete Berechnungen Probleme 1-16 Standard-Hybrid-Linearaktuatoren Linearaktuatoren - Typen Baugröße/ NEMA Max. Geschwindigkeit* Technische Daten Max. Schubkraft* Bezeichnung Gewindesteigung
Typen Anwendungsgebiete Berechnungen Probleme 1-16 Standard-Hybrid-Linearaktuatoren Linearaktuatoren - Typen Baugröße/ NEMA Max. Geschwindigkeit* Technische Daten Max. Schubkraft* Bezeichnung Gewindesteigung
Hochschule Düsseldorf University of Applied Sciences. 05. Januar 2017 HSD. Physik. Schwingungen II
 Physik Schwingungen II Ort, Geschwindigkeit, Beschleunigung x(t) = cos! 0 t v(t) =ẋ(t) =! 0 sin! 0 t t a(t) =ẍ(t) =! 2 0 cos! 0 t Energie In einem mechanischen System ist die Gesamtenergie immer gleich
Physik Schwingungen II Ort, Geschwindigkeit, Beschleunigung x(t) = cos! 0 t v(t) =ẋ(t) =! 0 sin! 0 t t a(t) =ẍ(t) =! 2 0 cos! 0 t Energie In einem mechanischen System ist die Gesamtenergie immer gleich
Direktantrieb ATR. Der schnellste Drehtisch mit revolutionärer eisenloser Motortechnologie
 Direktantrieb ATR Der schnellste Drehtisch mit revolutionärer eisenloser Motortechnologie Hochleistungs-Anwendungen, die eine schnelle Schaltbewegung erfordern 15 Grad bis 180 Grad bewegen sich in der
Direktantrieb ATR Der schnellste Drehtisch mit revolutionärer eisenloser Motortechnologie Hochleistungs-Anwendungen, die eine schnelle Schaltbewegung erfordern 15 Grad bis 180 Grad bewegen sich in der
Feldorientierte Regelung
 Dieter Gerling Audi-Forum elektrische Kleinantriebe im Fahrzeug Ingolstadt, 05.05.2014 Inhalt Grundlagen Feldorientierte Regelung am Beispiel Asynchronmaschine Feldorientierte Regelung am Beispiel Permanentmagnet-Maschine
Dieter Gerling Audi-Forum elektrische Kleinantriebe im Fahrzeug Ingolstadt, 05.05.2014 Inhalt Grundlagen Feldorientierte Regelung am Beispiel Asynchronmaschine Feldorientierte Regelung am Beispiel Permanentmagnet-Maschine
Induktion. Bewegte Leiter
 Induktion Bewegte Leiter durch die Kraft werden Ladungsträger bewegt auf bewegte Ladungsträger wirkt im Magnetfeld eine Kraft = Lorentzkraft Verschiebung der Ladungsträger ruft elektrisches Feld hervor
Induktion Bewegte Leiter durch die Kraft werden Ladungsträger bewegt auf bewegte Ladungsträger wirkt im Magnetfeld eine Kraft = Lorentzkraft Verschiebung der Ladungsträger ruft elektrisches Feld hervor
Steuerungs- und Regelungskonzepte für eine fluidisch betriebene Roboterhand
 Steuerungs- und Regelungskonzepte für eine fluidisch betriebene Roboterhand Sebastian Beck, Arne Lehmann, Jan Martin, Thomas Lotz, Ralf Mikut Forschungszentrum Karlsruhe, Institut für Angewandte Informatik
Steuerungs- und Regelungskonzepte für eine fluidisch betriebene Roboterhand Sebastian Beck, Arne Lehmann, Jan Martin, Thomas Lotz, Ralf Mikut Forschungszentrum Karlsruhe, Institut für Angewandte Informatik
EC-Axialventilator. Airfoil-Flügel Doppelflansch-Wandring
 ebm-papst Mulfingen GmbH & Co. KG Bachmühle 2 D-74673 Mulfingen Phone +49 7938 81- Fax +49 7938 81-11 info1@de.ebmpapst.com www.ebmpapst.com Kommanditgesellschaft Sitz Mulfingen Amtsgericht Stuttgart HRA
ebm-papst Mulfingen GmbH & Co. KG Bachmühle 2 D-74673 Mulfingen Phone +49 7938 81- Fax +49 7938 81-11 info1@de.ebmpapst.com www.ebmpapst.com Kommanditgesellschaft Sitz Mulfingen Amtsgericht Stuttgart HRA
diesbezüglich gerne eine an Für Ihre Unterstützung möchte ich mich bereits im Voraus bei Ihnen bedanken.
 6 Vorwort diesbezüglich gerne eine E-Mail an rainer.hagl@fh-rosenheim.desenden. Für Ihre Unterstützung möchte ich mich bereits im Voraus bei Ihnen bedanken. Formelsymbole Im gesamten Manuskript wurde versucht,
6 Vorwort diesbezüglich gerne eine E-Mail an rainer.hagl@fh-rosenheim.desenden. Für Ihre Unterstützung möchte ich mich bereits im Voraus bei Ihnen bedanken. Formelsymbole Im gesamten Manuskript wurde versucht,
Feldorientierte Regelung einer Asynchronmaschine 1. Inbetriebnahme des Versuchsstandes. Vorstellung der Schaltung.
 Fachhochschule Bielefeld Praktikum Versuch LE 6 FB 3 Leistungselektronik und Prof. Dr. Hofer Elektrotechnik Antriebe Feldorientierte Regelung einer Asynchronmaschine 1. Inbetriebnahme des Versuchsstandes.
Fachhochschule Bielefeld Praktikum Versuch LE 6 FB 3 Leistungselektronik und Prof. Dr. Hofer Elektrotechnik Antriebe Feldorientierte Regelung einer Asynchronmaschine 1. Inbetriebnahme des Versuchsstandes.
White Paper: Optimale Spannungsauslegung von mobilen Systemen
 U I P White Paper: Optimale Spannungsauslegung von mobilen Systemen Einleitung Bekannte Zusammenhänge: + Höhere Spannungen ermöglichen die gleiche Leistung mit geringerem Strom und damit geringeren Kupferquerschnitten
U I P White Paper: Optimale Spannungsauslegung von mobilen Systemen Einleitung Bekannte Zusammenhänge: + Höhere Spannungen ermöglichen die gleiche Leistung mit geringerem Strom und damit geringeren Kupferquerschnitten
Simulationsgestützte Entwicklung von Hydraulikkompaktaggregaten
 Simulationsgestützte Entwicklung von Hydraulikkompaktaggregaten Exkursion des VDI-Mechatronik im HAWE-Werk Freising, 03.11.2015 Alexander Leonhard, Sergej Klassen 1 HAWE Hydraulik SE 18.12.2015 1 Hydraulikkompaktaggregate
Simulationsgestützte Entwicklung von Hydraulikkompaktaggregaten Exkursion des VDI-Mechatronik im HAWE-Werk Freising, 03.11.2015 Alexander Leonhard, Sergej Klassen 1 HAWE Hydraulik SE 18.12.2015 1 Hydraulikkompaktaggregate
Widerstandskraft bzw. Widerstandsmoment
 7. ABS: Kräfte und Drehmomente Seite 1 iderstandskraft bzw. iderstandsmoment Bei einer gleichförmigen Bewegung muss die antreibende Kraft F bzw. M gleich der iderstandskraft (Lastmoment) F bzw. M sein
7. ABS: Kräfte und Drehmomente Seite 1 iderstandskraft bzw. iderstandsmoment Bei einer gleichförmigen Bewegung muss die antreibende Kraft F bzw. M gleich der iderstandskraft (Lastmoment) F bzw. M sein
Piezokreuztisch. Flaches XY-Nanopositioniersystem mit großer Apertur
 Piezokreuztisch Flaches XY-Nanopositioniersystem mit großer Apertur P-541.2 P-542.2 Niedrige Bauhöhe für einfache Integration: 16,5 mm Apertur 80 mm 80 mm Stellweg bis 200 µm 200 µm Schnellere Ansprechzeiten
Piezokreuztisch Flaches XY-Nanopositioniersystem mit großer Apertur P-541.2 P-542.2 Niedrige Bauhöhe für einfache Integration: 16,5 mm Apertur 80 mm 80 mm Stellweg bis 200 µm 200 µm Schnellere Ansprechzeiten
Regelung von regenerativen Energiesystemen
 Regelung von regenerativen Energiesystemen Christoph Hackl Munich School of Engineering (MSE) Research group Control of Renewable Energy Systems (CRES) (TUM) 05.12.2014 05.12.2014 Christoph Hackl: Regelung
Regelung von regenerativen Energiesystemen Christoph Hackl Munich School of Engineering (MSE) Research group Control of Renewable Energy Systems (CRES) (TUM) 05.12.2014 05.12.2014 Christoph Hackl: Regelung
Geberlose Antriebssysteme für Hochleistungs- Textilmaschinen
 Asynchronmotor oder Servoantrieb? Die ABM Greiffenberger Antriebstechnik GmbH präsentiert eine Alternative: Geberlose Antriebssysteme für Hochleistungs- Textilmaschinen Höchste Verfügbarkeit und sehr gute
Asynchronmotor oder Servoantrieb? Die ABM Greiffenberger Antriebstechnik GmbH präsentiert eine Alternative: Geberlose Antriebssysteme für Hochleistungs- Textilmaschinen Höchste Verfügbarkeit und sehr gute
 β Ζ φ ε = δ δ = + = = = = = ρ ρ γ γ γ γ γ γ γ = = = = = = + + = = = + + = = = = $ σ r ( ) K r = = = O M L r M r r = = O M L r M r r = = = = = = = = ( ) ( ) = ( ) = ± ( ) ( ) = ± ( ) = ± (
β Ζ φ ε = δ δ = + = = = = = ρ ρ γ γ γ γ γ γ γ = = = = = = + + = = = + + = = = = $ σ r ( ) K r = = = O M L r M r r = = O M L r M r r = = = = = = = = ( ) ( ) = ( ) = ± ( ) ( ) = ± ( ) = ± (
9. Vorlesung Wintersemester
 9. Vorlesung Wintersemester 1 Die Phase der angeregten Schwingung Wertebereich: bei der oben abgeleiteten Formel tan φ = β ω ω ω0. (1) ist noch zu sehen, in welchem Bereich der Winkel liegt. Aus der ursprünglichen
9. Vorlesung Wintersemester 1 Die Phase der angeregten Schwingung Wertebereich: bei der oben abgeleiteten Formel tan φ = β ω ω ω0. (1) ist noch zu sehen, in welchem Bereich der Winkel liegt. Aus der ursprünglichen
Einfluss von Spannungsoberschwingungen und Rastmomenten auf den Gleichlauf von Servoantrieben mit Permanentmagnet-Synchronmotoren
 Einfluss von Spannungsoberschwingungen und Rastmomenten auf den Gleichlauf von Servoantrieben mit Permanentmagnet-Synchronmotoren Influence of voltage harmonics and cogging torque on speed deviations of
Einfluss von Spannungsoberschwingungen und Rastmomenten auf den Gleichlauf von Servoantrieben mit Permanentmagnet-Synchronmotoren Influence of voltage harmonics and cogging torque on speed deviations of
LISA Linearaktor und Positioniertisch
 LISA Linearaktor und Positioniertisch Dynamisch und positionsstabil P-753 Geführter Stelltisch und Aktor zugleich Stellweg bis 38 µm Auflösung 0,1 nm Nichtmagnetische Versionen verfügbar Besonders schnelles
LISA Linearaktor und Positioniertisch Dynamisch und positionsstabil P-753 Geführter Stelltisch und Aktor zugleich Stellweg bis 38 µm Auflösung 0,1 nm Nichtmagnetische Versionen verfügbar Besonders schnelles
Fachhochschule Bielefeld Praktikum Versuch 1. Prof. Dr.-Ing. Hofer EM 1 GM FB Ingenieurwissenschaften Elektrische Maschinen. Gleichstrommaschine
 Trafo Fachhochschule Bielefeld Praktikum Versuch 1 Gleichstrommaschine Versuchsaufgabe: Die hier zu untersuchende fremderregte Gleichstrommaschine (GM) wird im Verbund mit einer Drehstromasynchronmaschine
Trafo Fachhochschule Bielefeld Praktikum Versuch 1 Gleichstrommaschine Versuchsaufgabe: Die hier zu untersuchende fremderregte Gleichstrommaschine (GM) wird im Verbund mit einer Drehstromasynchronmaschine
cyber force motors Linearaktuatoren
 c yber motor cyber force motors Linearaktuatoren zuverlässig kompakt präzise Ihre Anwendungen WITTENSTEIN Einsatz ohne Grenzen Fügen Elektromechanische Antriebszylinder mit hoher Wiederholgenauigkeit für
c yber motor cyber force motors Linearaktuatoren zuverlässig kompakt präzise Ihre Anwendungen WITTENSTEIN Einsatz ohne Grenzen Fügen Elektromechanische Antriebszylinder mit hoher Wiederholgenauigkeit für
Induktives Laden ein Themenschwerpunkt der Elektromobilität
 Induktives Laden ein Themenschwerpunkt der Elektromobilität 1 Warum berührungslos elektrische Energie übertragen? Kabel ist eine kritische Komponente. Insbesondere bei Übertragungen zwischen stehenden
Induktives Laden ein Themenschwerpunkt der Elektromobilität 1 Warum berührungslos elektrische Energie übertragen? Kabel ist eine kritische Komponente. Insbesondere bei Übertragungen zwischen stehenden
Der Elektrische Traktionsantrieb key component für die zukünftige Mobilität
 Dieter Gerling Universität der Bundeswehr München Audi Konferenz Center, Ingolstadt 1. Mai 211 Gehirn: IKT ( bits and bytes don t move you forward ) Herz: Batterie, Leistungselektronik Beine: E-Motor Übersicht
Dieter Gerling Universität der Bundeswehr München Audi Konferenz Center, Ingolstadt 1. Mai 211 Gehirn: IKT ( bits and bytes don t move you forward ) Herz: Batterie, Leistungselektronik Beine: E-Motor Übersicht
Elektrische Antriebe im Kfz
 Lehrveranstaltung Elektrische Antriebstechnik Grundlagen und Anwendungen Elektrische Antriebe im Kfz Prof. Dr. Ing. Ralph Kennel (ralph.kennel@tum.de) Technische Universität München Arcisstraße 21 80333
Lehrveranstaltung Elektrische Antriebstechnik Grundlagen und Anwendungen Elektrische Antriebe im Kfz Prof. Dr. Ing. Ralph Kennel (ralph.kennel@tum.de) Technische Universität München Arcisstraße 21 80333
Elektrische Antriebe im Kfz
 Lehrveranstaltung Elektrische Antriebstechnik Grundlagen und Anwendungen Elektrische Antriebe im Kfz Prof. Dr. Ing. Ralph Kennel (ralph.kennel@tum.de) Technische Universität München Arcisstraße 21 80333
Lehrveranstaltung Elektrische Antriebstechnik Grundlagen und Anwendungen Elektrische Antriebe im Kfz Prof. Dr. Ing. Ralph Kennel (ralph.kennel@tum.de) Technische Universität München Arcisstraße 21 80333
Vorlesung Elektrische Aktoren und Sensoren in geregelten Antrieben. Linear Drives
 Vorlesung Elektrische Aktoren und Sensoren in geregelten Antrieben Linear Drives Prof.Dr.-Ing. Ralph Kennel Ls.f.Elektrische Antriebssysteme und Leistungselektronik Technische Universität München 1 Direct
Vorlesung Elektrische Aktoren und Sensoren in geregelten Antrieben Linear Drives Prof.Dr.-Ing. Ralph Kennel Ls.f.Elektrische Antriebssysteme und Leistungselektronik Technische Universität München 1 Direct
PIMag Elektromagnetisches Antriebsprinzip: Vom OEM Antrieb zum 6D-System. Dr.-Ing. Thomas Haase
 PIMag Elektromagnetisches Antriebsprinzip: Vom OEM Antrieb zum 6D-System Dr.-Ing. Thomas Haase Worum geht es? Antriebstechnologien bei PI Um die Art und Weise, wie wir unsere Tische bewegen Um Aktoren
PIMag Elektromagnetisches Antriebsprinzip: Vom OEM Antrieb zum 6D-System Dr.-Ing. Thomas Haase Worum geht es? Antriebstechnologien bei PI Um die Art und Weise, wie wir unsere Tische bewegen Um Aktoren
Aufgaben zur Asynchronmaschine
 Blatt 1 Aufgaben zur Asynchronmaschine 1. Aufgabe Grundlagen Gegeben ist eine Asynchronmaschine (ASM) mit Kurzschlußläufer. Daten: U 1 = 566 V Statornennspannung F 1 = 60 Hz Statornennfrequenz = 2 Polpaarzahl
Blatt 1 Aufgaben zur Asynchronmaschine 1. Aufgabe Grundlagen Gegeben ist eine Asynchronmaschine (ASM) mit Kurzschlußläufer. Daten: U 1 = 566 V Statornennspannung F 1 = 60 Hz Statornennfrequenz = 2 Polpaarzahl
Physik III im Studiengang Elektrotechnik
 Physik III im Studiengang Elektrotechnik - harmonische Schwingungen - Prof. Dr. Ulrich Hahn WS 216/17 kinematische Beschreibung Auslenkungs Zeit Verlauf: ( t) ˆ cost Projektion einer gleichförmigen Kreisbewegung
Physik III im Studiengang Elektrotechnik - harmonische Schwingungen - Prof. Dr. Ulrich Hahn WS 216/17 kinematische Beschreibung Auslenkungs Zeit Verlauf: ( t) ˆ cost Projektion einer gleichförmigen Kreisbewegung
Entwicklung eines getriebelosen Transversalflussgenerators für Fluss-Strom-Anwendungen. S. Hieke, M. Stamann, T. Schallschmidt, R.
 Entwicklung eines getriebelosen Transversalflussgenerators für Fluss-Strom-Anwendungen S. Hieke, M. Stamann, T. Schallschmidt, R. Leidhold Lehrstuhl für Elektrische Antriebssysteme 27.09.16, Magdeburg
Entwicklung eines getriebelosen Transversalflussgenerators für Fluss-Strom-Anwendungen S. Hieke, M. Stamann, T. Schallschmidt, R. Leidhold Lehrstuhl für Elektrische Antriebssysteme 27.09.16, Magdeburg
WEKA Leistungsbremsen für Motorenprüfstände
 PRODUKTKATALOG WEKA Leistungsbremsen WEKA Leistungsbremsen für Motorenprüfstände Die WEKA Leistungsbremsen sind luftgekühlte Wirbelstrombremsen für Leistungssprüfungen an elektrischen Maschinen und Dieselmotoren.
PRODUKTKATALOG WEKA Leistungsbremsen WEKA Leistungsbremsen für Motorenprüfstände Die WEKA Leistungsbremsen sind luftgekühlte Wirbelstrombremsen für Leistungssprüfungen an elektrischen Maschinen und Dieselmotoren.
Die Stoppuhren der Forschung: Femtosekundenlaser
 Die Stoppuhren der Forschung: Femtosekundenlaser Stephan Winnerl Institut für Ionenstrahlphysik und Materialforschung Foschungszentrum Rossendorf Inhalt Femtosekunden Laserpulse (1 fs = 10-15 s) Grundlagen
Die Stoppuhren der Forschung: Femtosekundenlaser Stephan Winnerl Institut für Ionenstrahlphysik und Materialforschung Foschungszentrum Rossendorf Inhalt Femtosekunden Laserpulse (1 fs = 10-15 s) Grundlagen
Präzisions-Drehtisch Baureihe ACD
 Präzisions-Drehtisch Baureihe ACD Das spezielle geschützte magnetische Design des eisenlosen Torquemotors erzielt durch seine Kraftdichte eine außergewöhnliche Dynamik. Eisenloser Torquer mit minimaler
Präzisions-Drehtisch Baureihe ACD Das spezielle geschützte magnetische Design des eisenlosen Torquemotors erzielt durch seine Kraftdichte eine außergewöhnliche Dynamik. Eisenloser Torquer mit minimaler
Grundlagen der Elektrotechnik für Maschinenbauer
 Universität Siegen Grundlagen der Elektrotechnik für Maschinenbauer Fachbereich 12 Prüfer : Dr.-Ing. Klaus Teichmann Datum : 3. Februar 2005 Klausurdauer : 2 Stunden Hilfsmittel : 5 Blätter Formelsammlung
Universität Siegen Grundlagen der Elektrotechnik für Maschinenbauer Fachbereich 12 Prüfer : Dr.-Ing. Klaus Teichmann Datum : 3. Februar 2005 Klausurdauer : 2 Stunden Hilfsmittel : 5 Blätter Formelsammlung
Physik 1 für Ingenieure
 Physik 1 für Ingenieure Othmar Marti Experimentelle Physik Universität Ulm Othmar.Marti@Physik.Uni-Ulm.de Skript: http://wwwex.physik.uni-ulm.de/lehre/physing1 Übungsblätter und Lösungen: http://wwwex.physik.uni-ulm.de/lehre/physing1/ueb/ue#
Physik 1 für Ingenieure Othmar Marti Experimentelle Physik Universität Ulm Othmar.Marti@Physik.Uni-Ulm.de Skript: http://wwwex.physik.uni-ulm.de/lehre/physing1 Übungsblätter und Lösungen: http://wwwex.physik.uni-ulm.de/lehre/physing1/ueb/ue#
Mechatronik und elektrische Antriebe
 Prof. Dr. Ing. Joachim Böcker Mechatronik und elektrische Antriebe 03.09.2014 Name: Matrikelnummer: Vorname: Studiengang: Aufgabe: (Punkte) 1 (30) 2 (18) 3 (22) Gesamt (60) Note Bearbeitungszeit: 120 Minuten
Prof. Dr. Ing. Joachim Böcker Mechatronik und elektrische Antriebe 03.09.2014 Name: Matrikelnummer: Vorname: Studiengang: Aufgabe: (Punkte) 1 (30) 2 (18) 3 (22) Gesamt (60) Note Bearbeitungszeit: 120 Minuten
Vorlesung Bewegungssteuerung durch geregelte elektrische Antriebe. Regelung 1
 Vorlesung Bewegungssteuerung durch geregelte elektrische Antriebe Regelung 1 Klassische Kaskade (Strom-, Drehmoment-, Drehzahl-Regelung) Regelung 2 Control Schemes s* Lageregelung position controller speed
Vorlesung Bewegungssteuerung durch geregelte elektrische Antriebe Regelung 1 Klassische Kaskade (Strom-, Drehmoment-, Drehzahl-Regelung) Regelung 2 Control Schemes s* Lageregelung position controller speed
NANO III - MSR. Steuern Regeln Regelkreis PID-Regler Dimensionierung eines PID Reglers. Themen: Nano III MSR Physics Basel, Michael Steinacher 1
 NANO III - MSR Themen: Steuern Regeln Regelkreis PID-Regler Dimensionierung eines PID Reglers Nano III MSR Physics Basel, Michael Steinacher 1 Ziele 1. Unterschied Steuern Regeln 2. Was ist ein Regelkreis
NANO III - MSR Themen: Steuern Regeln Regelkreis PID-Regler Dimensionierung eines PID Reglers Nano III MSR Physics Basel, Michael Steinacher 1 Ziele 1. Unterschied Steuern Regeln 2. Was ist ein Regelkreis
Aufgabe 1: Klausur Physik für Maschinenbauer (SS 2009) Lösungen 1. (10 Punkte)
 Lösungen 1. (10 Punkte)") Klausur Physik für Maschinenbauer (SS 2009) Lösungen 1 Aufgabe 1: Schiefe Ebene Auf einer reibungsfreien, schiefen Ebene mit dem Winkel 30 befindet sich eine Kiste der Masse m = 100 kg zunächst in Ruhe.
Klausur Physik für Maschinenbauer (SS 2009) Lösungen 1 Aufgabe 1: Schiefe Ebene Auf einer reibungsfreien, schiefen Ebene mit dem Winkel 30 befindet sich eine Kiste der Masse m = 100 kg zunächst in Ruhe.
Institut für Elektrotechnik und Informationstechnik. Aufgabensammlung zur. Regelungstechnik B. Prof. Dr. techn. F. Gausch Dipl.-Ing. C.
 Institut für Elektrotechnik und Informationstechnik Aufgabensammlung zur Regelungstechnik B Prof. Dr. techn. F. Gausch Dipl.-Ing. C. Balewski 10.03.2011 Übungsaufgaben zur Regelungstechnik B Aufgabe 0
Institut für Elektrotechnik und Informationstechnik Aufgabensammlung zur Regelungstechnik B Prof. Dr. techn. F. Gausch Dipl.-Ing. C. Balewski 10.03.2011 Übungsaufgaben zur Regelungstechnik B Aufgabe 0
Motoren der Omni -Serie
 DREHMOMENT Motoren und Aktoren PRODUKTDATENBLATT Motoren der Omni -Serie Direktantriebe mit geringer Bauhöhe für die Maschinen und Roboter der Welt Die Omni-Serie ermöglicht es Erstausrüstern, zuverlässige,
DREHMOMENT Motoren und Aktoren PRODUKTDATENBLATT Motoren der Omni -Serie Direktantriebe mit geringer Bauhöhe für die Maschinen und Roboter der Welt Die Omni-Serie ermöglicht es Erstausrüstern, zuverlässige,
Hightech-Schwungräder als Speicher für Öko-Strom
 Hightech-Schwungräder als Speicher für Öko-Strom Institut für Mechanik und Mechatronik Univ.-Prof.Dr. Johann Wassermann Forschergruppe: S. Hartl, T. Hinterdorfer, A. Schulz, H. Sima Vortrags-Überblick
Hightech-Schwungräder als Speicher für Öko-Strom Institut für Mechanik und Mechatronik Univ.-Prof.Dr. Johann Wassermann Forschergruppe: S. Hartl, T. Hinterdorfer, A. Schulz, H. Sima Vortrags-Überblick
III. Schwingungen und Wellen
 III. Schwingungen und Wellen III.1 Schwingungen Physik für Mediziner 1 Schwingungen Eine Schwingung ist ein zeitlich periodischer Vorgang Schwingungen finden im allgemeinen um eine stabile Gleichgewichtslage
III. Schwingungen und Wellen III.1 Schwingungen Physik für Mediziner 1 Schwingungen Eine Schwingung ist ein zeitlich periodischer Vorgang Schwingungen finden im allgemeinen um eine stabile Gleichgewichtslage
Advanced Motion Control Techniques. Dipl. Ing. Jan Braun maxon motor ag Switzerland
 Advanced Motion Control Techniques Dipl. Ing. Jan Braun maxon motor ag Switzerland Agenda Schematiascher Aufbau Positionsregelkreis Übersicht Motion Control Systeme PC based mit CANopen für DC und EC Motoren
Advanced Motion Control Techniques Dipl. Ing. Jan Braun maxon motor ag Switzerland Agenda Schematiascher Aufbau Positionsregelkreis Übersicht Motion Control Systeme PC based mit CANopen für DC und EC Motoren
U-521 PILine Linearversteller
 U-521 PILine Linearversteller Kompakter Versteller mit Ultraschall-Piezomotor Positioniert kleine Lasten schnell und präzise: Geschwindigkeit bis 200 mm/s, kleinste Schrittweite bis 0,3 µm Platzsparend:
U-521 PILine Linearversteller Kompakter Versteller mit Ultraschall-Piezomotor Positioniert kleine Lasten schnell und präzise: Geschwindigkeit bis 200 mm/s, kleinste Schrittweite bis 0,3 µm Platzsparend:
σ ½ 7 10-8 cm = 7 10-10 m σ ½ 1 nm
 Zahlenbeispiele mittlere freie Weglänge: Λ = 1 / (σ n B ) mittlere Zeit zwischen Stößen τ = Λ / < v > Gas: Stickstoff Druck: 1 bar = 10 5 Pa Dichte n = 3 10 19 cm -3 σ = 45 10-16 cm 2 σ ½ 7 10-8 cm = 7
Zahlenbeispiele mittlere freie Weglänge: Λ = 1 / (σ n B ) mittlere Zeit zwischen Stößen τ = Λ / < v > Gas: Stickstoff Druck: 1 bar = 10 5 Pa Dichte n = 3 10 19 cm -3 σ = 45 10-16 cm 2 σ ½ 7 10-8 cm = 7
Simulation alternativer Fahrzeuge mit Dymola/Modelica
 Simulation alternativer Fahrzeuge mit Dymola/Modelica Dragan SIMIC arsenal research Einleitung Motivation Modelica/Dymola Entwickelte Libraries in Modelica SmartElectricDrives Library SmartHybridElectricVehicles
Simulation alternativer Fahrzeuge mit Dymola/Modelica Dragan SIMIC arsenal research Einleitung Motivation Modelica/Dymola Entwickelte Libraries in Modelica SmartElectricDrives Library SmartHybridElectricVehicles
AC Square Motors. AMP Series 90 -> kW HP. t-telectric.com. Rechteckige Drehstrommotoren Prospekt 2009/04 D
 AC Square Motors Rechteckige Drehstrommotoren Prospekt 2009/04 D AMP Series 90 ->225 1-300kW 1.3-402 HP t-telectric.com Leistungsdaten Leistung Betrieb in hohen Drehzahlbereichen (bis zu 8000 U / min)
AC Square Motors Rechteckige Drehstrommotoren Prospekt 2009/04 D AMP Series 90 ->225 1-300kW 1.3-402 HP t-telectric.com Leistungsdaten Leistung Betrieb in hohen Drehzahlbereichen (bis zu 8000 U / min)
03/2006. Magnetgelagerte. Hochgeschwindigkeitsantriebssysteme xx x x x x
 Magnetgelagerte Hochgeschwindigkeitsantriebssysteme Inhalt Magnetlagertechnik Systemkomponenten Spindelsystem Applikationen Diskussion 2 Aktive Magnetlager i m Leistungsverstärker Fluß s f m mg Distanzsensor
Magnetgelagerte Hochgeschwindigkeitsantriebssysteme Inhalt Magnetlagertechnik Systemkomponenten Spindelsystem Applikationen Diskussion 2 Aktive Magnetlager i m Leistungsverstärker Fluß s f m mg Distanzsensor
Was ist Physik? Modell der Natur universell es war schon immer so
 Was ist Physik? Modell der Natur universell es war schon immer so Kultur Aus was sind wir gemacht? Ursprung und Aufbau der Materie Von wo/was kommen wir? Ursprung und Aufbau von Raum und Zeit Wirtschaft
Was ist Physik? Modell der Natur universell es war schon immer so Kultur Aus was sind wir gemacht? Ursprung und Aufbau der Materie Von wo/was kommen wir? Ursprung und Aufbau von Raum und Zeit Wirtschaft
Motoren und Getriebe. Torquemotoren IndraDyn T - für hohe Drehmomente
 Torquemotoren IndraDyn T - für hohe Drehmomente 2 Bosch Rexroth AG Electric Drives and Controls Dokumentation Projektierungshilfe Kraftvoll und direkt Maximaldrehmomente bis 13.800 Nm Volles Drehmoment
Torquemotoren IndraDyn T - für hohe Drehmomente 2 Bosch Rexroth AG Electric Drives and Controls Dokumentation Projektierungshilfe Kraftvoll und direkt Maximaldrehmomente bis 13.800 Nm Volles Drehmoment
ÜBERWACHUNG UND REGELUNG FREQUENZUMRICHTER (VARIABLE FREQUENCY DRIVE, VFD)
") ÜBERWACHUNG UND REGELUNG FREQUENZUMRICHTER (VARIABLE FREQUENCY DRIVE, VFD) Gleichmäßige Bewässerung Wenn man eine effiziente Bewässerung garantieren möchte, muss man zunächst verstehen, warum es wichtig
ÜBERWACHUNG UND REGELUNG FREQUENZUMRICHTER (VARIABLE FREQUENCY DRIVE, VFD) Gleichmäßige Bewässerung Wenn man eine effiziente Bewässerung garantieren möchte, muss man zunächst verstehen, warum es wichtig
INFORMATIONSMATERIAL DREHDURCHFÜHRUNGEN
 INFORMATIONSMATERIAL DREHDURCHFÜHRUNGEN EINLEITUNG: Vielen Dank für Ihr Interesse an den Drehdurchführungen der Firma Tries. Wir haben mehr als 50 Jahre Erfahrung in der Entwicklung und der Herstellung
INFORMATIONSMATERIAL DREHDURCHFÜHRUNGEN EINLEITUNG: Vielen Dank für Ihr Interesse an den Drehdurchführungen der Firma Tries. Wir haben mehr als 50 Jahre Erfahrung in der Entwicklung und der Herstellung
Effizienzsteigerung durch zukunftsorientierte Antriebslösungen
 Effizienzsteigerung durch zukunftsorientierte Antriebslösungen Presentation for Efficiency Arena Hannover 2013 April 2013 Bauer Gear Motor GmbH Kennzahlen Stand 2012 Unternehmen Gegründet 1927 Firmensitz
Effizienzsteigerung durch zukunftsorientierte Antriebslösungen Presentation for Efficiency Arena Hannover 2013 April 2013 Bauer Gear Motor GmbH Kennzahlen Stand 2012 Unternehmen Gegründet 1927 Firmensitz
Fachpraktikum Hochdynamische Antriebssysteme. Theoretische Grundlagen
 Fachpraktikum Hochdynamische Antriebssysteme Christof Zwyssig Franz Zürcher Philipp Karutz HS 2008 Permanentmagneterregte Synchronmaschine Die hier aufgeführten theoretischen Betrachtungen dienen dem Grundverständnis
Fachpraktikum Hochdynamische Antriebssysteme Christof Zwyssig Franz Zürcher Philipp Karutz HS 2008 Permanentmagneterregte Synchronmaschine Die hier aufgeführten theoretischen Betrachtungen dienen dem Grundverständnis
Flachheitsbasierte Regelung Adaptiver Optik
 Flachheitsbasierte Regelung Adaptiver Optik Thomas Ruppel Institut für Systemdynamik Universität Stuttgart Elgersburger Arbeitstagung Feb. 2008 Systemdynamische Grundlagen Adaptiver Optik Der Planet Neptun
Flachheitsbasierte Regelung Adaptiver Optik Thomas Ruppel Institut für Systemdynamik Universität Stuttgart Elgersburger Arbeitstagung Feb. 2008 Systemdynamische Grundlagen Adaptiver Optik Der Planet Neptun
Elektrischer Antrieb vs. Antriebssystem im Spannungsfeld von Gesetzen, Normen und Applikation
 Elektrischer Antrieb vs. Antriebssystem im Spannungsfeld von Gesetzen, Normen und Applikation VEM-Gruppe www.vem-group.com Forum Industrial Automation, Hannover Messe Industrie, 15.04.15 Dipl.-Ing. Sylvia
Elektrischer Antrieb vs. Antriebssystem im Spannungsfeld von Gesetzen, Normen und Applikation VEM-Gruppe www.vem-group.com Forum Industrial Automation, Hannover Messe Industrie, 15.04.15 Dipl.-Ing. Sylvia
Advanced Motion Control Techniques
 Advanced Motion Control Techniques Dipl. Ing. Jan Braun maxon motor ag Switzerland Dipl. Ing. Alexander Rudolph National Instruments Switzerland Agenda Schematiascher Aufbau Positionsregelkreis Übersicht
Advanced Motion Control Techniques Dipl. Ing. Jan Braun maxon motor ag Switzerland Dipl. Ing. Alexander Rudolph National Instruments Switzerland Agenda Schematiascher Aufbau Positionsregelkreis Übersicht
Institut für Elektrische Maschinen, Antriebe und Bahnen
 Prof. Dr.-Ing. Markus Henke markus.henke@tu-braunschweig.de, 0531 3913914 (Elektrische Antriebssysteme) Prof. Dr.-Ing. Regine Mallwitz (Leistungselektronik) regine.mallwitz@tu-braunschweig.de, 0531 3913901
Prof. Dr.-Ing. Markus Henke markus.henke@tu-braunschweig.de, 0531 3913914 (Elektrische Antriebssysteme) Prof. Dr.-Ing. Regine Mallwitz (Leistungselektronik) regine.mallwitz@tu-braunschweig.de, 0531 3913901
3.4 Frequenzbereiche, Ultraschall
 3.4 Frequenzbereiche, Ultraschall Frequenzbereich, Frequenzspektrum, Reflexion von Schallwellen, Anwendungen Bsp.: Ultraschalluntersuchungen, Farbdoppler für die Analyse von Strömungen (Herzklappenfunktion,
3.4 Frequenzbereiche, Ultraschall Frequenzbereich, Frequenzspektrum, Reflexion von Schallwellen, Anwendungen Bsp.: Ultraschalluntersuchungen, Farbdoppler für die Analyse von Strömungen (Herzklappenfunktion,
Entwicklung und sensorlose Regelung von PM-Außenläufer- Traktions-Maschinen. Development and Sensorless Control of PM Outer Rotor Traction Machines
 Entwicklung und sensorlose Regelung von PM-Außenläufer- Traktions-Maschinen Development and Sensorless Control of PM Outer Rotor Traction Machines Florian Demmelmayr 04. Juli 2013 Überblick Motivation
Entwicklung und sensorlose Regelung von PM-Außenläufer- Traktions-Maschinen Development and Sensorless Control of PM Outer Rotor Traction Machines Florian Demmelmayr 04. Juli 2013 Überblick Motivation
Motorparkanalyse. 1. Das Konzept der MPA. 2. Exkurs: Elektromotor. 3. Die MPA Online. 4. Die Grobanalyse. 5. Die Feinanalyse. 6.
 Motorparkanalyse Jens Hapke 1. Das Konzept der MPA 2. Exkurs: Elektromotor 3. Die MPA Online 4. Die Grobanalyse 5. Die Feinanalyse 6. Der Maßnahmenplan 7. Die Motorparkanalyse am Beispiel 15.02.2017 Wir
Motorparkanalyse Jens Hapke 1. Das Konzept der MPA 2. Exkurs: Elektromotor 3. Die MPA Online 4. Die Grobanalyse 5. Die Feinanalyse 6. Der Maßnahmenplan 7. Die Motorparkanalyse am Beispiel 15.02.2017 Wir
Einführung in die Robotik. Jianwei Zhang
 - Jianwei Zhang zhang@informatik.uni-hamburg.de Fakultät für Mathematik, Informatik und Naturwissenschaften Technische Aspekte Multimodaler Systeme 7. Juni 2011 J. Zhang 272 Roboterregelung Gliederung
- Jianwei Zhang zhang@informatik.uni-hamburg.de Fakultät für Mathematik, Informatik und Naturwissenschaften Technische Aspekte Multimodaler Systeme 7. Juni 2011 J. Zhang 272 Roboterregelung Gliederung
Title of the presentation. further informations Arial 24 pt. Mai, 2006 page 1
 Title of the presentation maximum ADVANCED two ELEVATOR lines, Arial 24 TECHNOLOGIES pt, bold further informations Arial 24 pt Mai, 2006 page 1 BUCHER HYDRAULICS Neuheim / CH Ihr Partner für hydraulische
Title of the presentation maximum ADVANCED two ELEVATOR lines, Arial 24 TECHNOLOGIES pt, bold further informations Arial 24 pt Mai, 2006 page 1 BUCHER HYDRAULICS Neuheim / CH Ihr Partner für hydraulische
Gliederung. Gliederung (cont.) Klassifikation der Regelung von Roboterarmen
 Klassifikation der Regelung von Roboterarmen") - Roboterregelung Gliederung Jianwei Zhang zhang@informatik.uni-hamburg.de Fakultät für Mathematik, Informatik und Naturwissenschaften Technische Aspekte Multimodaler Systeme 19. Juni 2012 Allgemeine Informationen
- Roboterregelung Gliederung Jianwei Zhang zhang@informatik.uni-hamburg.de Fakultät für Mathematik, Informatik und Naturwissenschaften Technische Aspekte Multimodaler Systeme 19. Juni 2012 Allgemeine Informationen
7. Elektromagnetische Wellen (im Vakuum)
") 7. Elektromagnetische Wellen (im Vakuum) Wir betrachten das elektromagnetische Feld bei Abwesenheit von Ladungen und Strömen und untersuchen die Lösungen der Maxwellschen Gleichungen. 7.1 Wellengleichungen
7. Elektromagnetische Wellen (im Vakuum) Wir betrachten das elektromagnetische Feld bei Abwesenheit von Ladungen und Strömen und untersuchen die Lösungen der Maxwellschen Gleichungen. 7.1 Wellengleichungen
ENTWURF EINES WINDKRAFTGENERATORS
 Entwurf eines Windkraftgenerators 1 ENTWURF EINES WINDKRAFTGENERATORS I. Verde, G. Bühler 1 EINLEITUNG Die Nutzung der Windenergie nahm in den letzten Jahren nicht zuletzt durch die Förderprograe der Länder
Entwurf eines Windkraftgenerators 1 ENTWURF EINES WINDKRAFTGENERATORS I. Verde, G. Bühler 1 EINLEITUNG Die Nutzung der Windenergie nahm in den letzten Jahren nicht zuletzt durch die Förderprograe der Länder
XY-Piezonanopositionierer
 XY-Piezonanopositionierer Hochpräziser XY-Scanner mit Apertur P-733.2 Stellwege bis 100 µm 100 µm in X und Y Auflösung bis 0,1 nm durch kapazitive Sensoren Hochgeschwindigkeitsversionen mit Direktantrieb
XY-Piezonanopositionierer Hochpräziser XY-Scanner mit Apertur P-733.2 Stellwege bis 100 µm 100 µm in X und Y Auflösung bis 0,1 nm durch kapazitive Sensoren Hochgeschwindigkeitsversionen mit Direktantrieb
Regelung eines inversen Pendels
 Regelung eines inversen Pendels Dr.-Ing. Michael Buchholz 29.10.2010 Institut für Mess-, Regel- und Mikrotechnik NI Dozenten- und Ausbildertag 2010 Fürstenfeldbruck Seite 2 Anwendungsgebiete in der Forschung
Regelung eines inversen Pendels Dr.-Ing. Michael Buchholz 29.10.2010 Institut für Mess-, Regel- und Mikrotechnik NI Dozenten- und Ausbildertag 2010 Fürstenfeldbruck Seite 2 Anwendungsgebiete in der Forschung
Presseinformation. Es geht auch ohne Kabel. Hocheffizientes induktives Ladesystem für Elektrofahrzeuge entwickelt
 Seite 1 Es geht auch ohne Kabel Hocheffizientes induktives Ladesystem für Elektrofahrzeuge entwickelt Wissenschaftler des Fraunhofer-Instituts für Solare Energiesysteme ISE in Freiburg haben ein hocheffizientes
Seite 1 Es geht auch ohne Kabel Hocheffizientes induktives Ladesystem für Elektrofahrzeuge entwickelt Wissenschaftler des Fraunhofer-Instituts für Solare Energiesysteme ISE in Freiburg haben ein hocheffizientes
Zusammenfassung der 6. Vorlesung
 Zusammenfassung der 6. Vorlesung Dynamische Systeme 2-ter Ordnung (PT 2 -System) Schwingungsfähige Systeme 2-ter Ordnung. - Systeme mit Speicher für potentielle und kinetische Energie - Beispiel: Feder-Masse-Dämpfer
Zusammenfassung der 6. Vorlesung Dynamische Systeme 2-ter Ordnung (PT 2 -System) Schwingungsfähige Systeme 2-ter Ordnung. - Systeme mit Speicher für potentielle und kinetische Energie - Beispiel: Feder-Masse-Dämpfer
Schrittmotor mit integrierter Elektronik Baureihe STP
 Schrittmotor mit integrierter Elektronik Baureihe STP Mit der neuen Generation von dynamischen Schrittmotoren mit integrierter Elektronik, sparen Sie mit einfachster Inbetriebnahme (Plug & Play) und geringem
Schrittmotor mit integrierter Elektronik Baureihe STP Mit der neuen Generation von dynamischen Schrittmotoren mit integrierter Elektronik, sparen Sie mit einfachster Inbetriebnahme (Plug & Play) und geringem
We Keep the World in Motion. Mixer
 We Keep the World in Motion. Mixer www.elinmotoren.at Mai 2017 Wassergekühlte Mororen seit 1973 weltweit tausendfach bewährt Mixer 132 kw - 1650 kw Spritzguss Maschinen 37 kw - 250 kw Bergbau 100 kw -
We Keep the World in Motion. Mixer www.elinmotoren.at Mai 2017 Wassergekühlte Mororen seit 1973 weltweit tausendfach bewährt Mixer 132 kw - 1650 kw Spritzguss Maschinen 37 kw - 250 kw Bergbau 100 kw -
Hybrid Positioniersysteme für Picometer Auflösung mit Millimeter Stellbereich. Rainer Gloess R&D Head of Advanced Mechatronics
 Hybrid Positioniersysteme für Picometer Auflösung mit Millimeter Stellbereich Rainer Gloess R&D Head of Advanced Mechatronics r.gloess@pi.ws Motivation Wie groß ist ein Picometer? Welche Applikationen
Hybrid Positioniersysteme für Picometer Auflösung mit Millimeter Stellbereich Rainer Gloess R&D Head of Advanced Mechatronics r.gloess@pi.ws Motivation Wie groß ist ein Picometer? Welche Applikationen
Leseprobe aus Kapitel 4 Mechanische Dynamik des Buchs Strukturbildung und Simulation technischer Systeme
 Reibungskraft F.R Leseprobe aus Kapitel 4 Mechanische Dynamik des Buchs Strukturbildung und Simulation technischer Systeme In diesem Beispiel wird gezeigt, wie Formeln Strukturbildung numerisch berechnet
Reibungskraft F.R Leseprobe aus Kapitel 4 Mechanische Dynamik des Buchs Strukturbildung und Simulation technischer Systeme In diesem Beispiel wird gezeigt, wie Formeln Strukturbildung numerisch berechnet
Piezoelektrische Antriebstechnologie für Kleinventile: Gesamtkonzept, Ansteuerelektroniken und inhärente Sensorfunktionen
 Piezoelektrische Antriebstechnologie für Kleinventile: Gesamtkonzept, Ansteuerelektroniken und inhärente Sensorfunktionen Der Fakultät Maschinenwesen der Technischen Universität Dresden zur Erlangung des
Piezoelektrische Antriebstechnologie für Kleinventile: Gesamtkonzept, Ansteuerelektroniken und inhärente Sensorfunktionen Der Fakultät Maschinenwesen der Technischen Universität Dresden zur Erlangung des
Diplomvorprüfung WS 2009/10 Grundlagen der Elektrotechnik Dauer: 90 Minuten
 Diplomvorprüfung Grundlagen der Elektrotechnik Seite 1 von 8 Hochschule München Fakultät 03 Zugelassene Hilfsmittel: Taschenrechner, zwei Blatt DIN A4 eigene Aufzeichnungen Diplomvorprüfung WS 2009/10
Diplomvorprüfung Grundlagen der Elektrotechnik Seite 1 von 8 Hochschule München Fakultät 03 Zugelassene Hilfsmittel: Taschenrechner, zwei Blatt DIN A4 eigene Aufzeichnungen Diplomvorprüfung WS 2009/10
Servohydraulik - Geregelte hydraulische Antriebe
 AACHEN Antriebe und Steuerungen Univ.-Prof. H. Univ.-Prof. Dr.-lng. H. Murrenhoff Umdruck zur Vorlesung Servohydraulik - Geregelte hydraulische Antriebe 4., neu iiberarbeitete Auflage 2012 unter Mitwirkung
AACHEN Antriebe und Steuerungen Univ.-Prof. H. Univ.-Prof. Dr.-lng. H. Murrenhoff Umdruck zur Vorlesung Servohydraulik - Geregelte hydraulische Antriebe 4., neu iiberarbeitete Auflage 2012 unter Mitwirkung
Motoren, die die Welt bewegen. Extruder
 Motoren, die die Welt bewegen. Extruder www.elinmotoren.at Mai 2017 Wassergekühlte Mororen seit 1973 weltweit tausendfach bewährt Mixer 132 kw - 1650 kw Spritzguss Maschinen 37 kw - 250 kw Bergbau 100
Motoren, die die Welt bewegen. Extruder www.elinmotoren.at Mai 2017 Wassergekühlte Mororen seit 1973 weltweit tausendfach bewährt Mixer 132 kw - 1650 kw Spritzguss Maschinen 37 kw - 250 kw Bergbau 100
Dynamische Wechselwirkung von Windparks mit dem Übertragungsnetz
 Dynamische Wechselwirkung von Windparks mit dem Übertragungsnetz Prof. Dr.-Ing. habil I. Erlich Universität Duisburg-Essen Fachgebiet Elektrische Anlagen und Netze Dr.-Ing. W. Winter E.ON Netz GmbH Dr.-Ing.
Dynamische Wechselwirkung von Windparks mit dem Übertragungsnetz Prof. Dr.-Ing. habil I. Erlich Universität Duisburg-Essen Fachgebiet Elektrische Anlagen und Netze Dr.-Ing. W. Winter E.ON Netz GmbH Dr.-Ing.
MISSION ALPHA. Wähle einen Zielraum und führe dort eine Interagieren-Aktion aus. Wähle drei Schleusen aus und zerstöre sie. Sammle 5 Frags.
 MISSION ALPHA Wähle einen Zielraum und führe dort eine Interagieren-Aktion aus. Wähle drei Schleusen aus und zerstöre sie. Sammle 5 Frags. MISSION BETA Wähle einen Zielraum aus, führe dort eine Interagieren-Aktion
MISSION ALPHA Wähle einen Zielraum und führe dort eine Interagieren-Aktion aus. Wähle drei Schleusen aus und zerstöre sie. Sammle 5 Frags. MISSION BETA Wähle einen Zielraum aus, führe dort eine Interagieren-Aktion
Einfluss von Messfehlern der elektrischen Leistung auf die Zusatzverlustbestimmung. Einführung Verfahren zur Wirkungsgradbestimmung
 Einfluss von Messfehlern der elektrischen Leistung auf die Zusatzverlustbestimmung Einführung Verfahren zur Wirkungsgradbestimmung Direkte Verfahren Indirekte Verfahren Toleranz der Wirkungsgradangabe
Einfluss von Messfehlern der elektrischen Leistung auf die Zusatzverlustbestimmung Einführung Verfahren zur Wirkungsgradbestimmung Direkte Verfahren Indirekte Verfahren Toleranz der Wirkungsgradangabe
Pumpenregelung simpel oder intelligent?
 Pumpenregelung simpel oder intelligent? Regelpumpen haben einen festen Platz in der Hydraulik. Ihr Vorteil: Sie stellen nur soviel Förderstrom bzw. Leistung zur Verfügung, wie für die vorgegebene Bewegungsaufgabe
Pumpenregelung simpel oder intelligent? Regelpumpen haben einen festen Platz in der Hydraulik. Ihr Vorteil: Sie stellen nur soviel Förderstrom bzw. Leistung zur Verfügung, wie für die vorgegebene Bewegungsaufgabe
Ü b u n g s b l a t t 11
 Mathe für Physiker I Wintersemester 0/04 Walter Oevel 8. 1. 004 Ü b u n g s b l a t t 11 Abgabe von Aufgaben am 15.1.004 in der Übung. Aufgabe 91*: (Differentialgleichungen, Separation. 10 Bonuspunkte
Mathe für Physiker I Wintersemester 0/04 Walter Oevel 8. 1. 004 Ü b u n g s b l a t t 11 Abgabe von Aufgaben am 15.1.004 in der Übung. Aufgabe 91*: (Differentialgleichungen, Separation. 10 Bonuspunkte
Von der Piezokeramik zum Piezokomposit. Frank Möller, PI Ceramic GmbH / Dr. Peter Wierach, DLR
 Von der Piezokeramik zum Piezokomposit Frank Möller, PI Ceramic GmbH / Dr. Peter Wierach, DLR PI Ceramic: Piezotechnologie Gegründet 1992 als Tochter von Physik Instrumente (PI) Firmensitz in Lederhose,
Von der Piezokeramik zum Piezokomposit Frank Möller, PI Ceramic GmbH / Dr. Peter Wierach, DLR PI Ceramic: Piezotechnologie Gegründet 1992 als Tochter von Physik Instrumente (PI) Firmensitz in Lederhose,
Oberwellenorientierte Wicklungsmodifikation von permanentmagneterregten Synchronmaschinen mit Zahnspulenwicklung
 Oberwellenorientierte Wicklungsmodifikation von permanentmagneterregten Synchronmaschinen mit Zahnspulenwicklung FEMAG Anwendertreffen 2013 Christopher Veeh WITTENSTEIN cyber motor GmbH WITTENSTEIN 1 WITTENSTEIN
Oberwellenorientierte Wicklungsmodifikation von permanentmagneterregten Synchronmaschinen mit Zahnspulenwicklung FEMAG Anwendertreffen 2013 Christopher Veeh WITTENSTEIN cyber motor GmbH WITTENSTEIN 1 WITTENSTEIN
Strukturvariable Regelung eines humanoiden Roboterarmes mit bildgebenden und Kraft-Momenten-Sensoren. Bodmar Diestel-Feddersen, Giulio Milighetti
 mit bildgebenden und Kraft-Momenten-Sensoren Bodmar Diestel-Feddersen, Giulio Milighetti Inhalt 1. Motivation und Aufgabenstellung 2. Multisensorielles Regelungskonzept zum Fallbeispiel Peg-In-Hole 3.
mit bildgebenden und Kraft-Momenten-Sensoren Bodmar Diestel-Feddersen, Giulio Milighetti Inhalt 1. Motivation und Aufgabenstellung 2. Multisensorielles Regelungskonzept zum Fallbeispiel Peg-In-Hole 3.
Musterlösung Grundlagen der Elektrotechnik B
 Prof. Dr.-Ing. Joachim Böcker Musterlösung Grundlagen der Elektrotechnik B 01.04.2015 01.04.2015 Musterlösung Grundlagen der Elektrotechnik B Seite 1 von 14 Aufgabe 1: Gleichstrommaschine (20 Punkte) LÖSUNG
Prof. Dr.-Ing. Joachim Böcker Musterlösung Grundlagen der Elektrotechnik B 01.04.2015 01.04.2015 Musterlösung Grundlagen der Elektrotechnik B Seite 1 von 14 Aufgabe 1: Gleichstrommaschine (20 Punkte) LÖSUNG
1. Beobachtung von Spannungen und Strömen am 4Q-SR mit dem Oszilloskop: u, i, u d, i d, u T.
 Fachhochschule Praktikum Versuch AS 1 Bielefeld Leistungselektronik und Antriebe Prof. Dr. Hofer FB Elektrotechnik Regelungstechnik und Leistungselektronik UKEHRSTRORICHTER - ANTRIEBE Versuchsaufgabe Der
Fachhochschule Praktikum Versuch AS 1 Bielefeld Leistungselektronik und Antriebe Prof. Dr. Hofer FB Elektrotechnik Regelungstechnik und Leistungselektronik UKEHRSTRORICHTER - ANTRIEBE Versuchsaufgabe Der
Stromortskurve Asynchronmaschine
 Stromortskurve der Asynchronmaschine Prof. Dr.-Ing. Carsten Fräger Folie 1 von 61 Prof. Dr.-Ing. Stromortskurve Asynchronmaschine Stromortskurve der Drehstrom-Asynchronmaschine mit kurzgeschlossenem Rotor
Stromortskurve der Asynchronmaschine Prof. Dr.-Ing. Carsten Fräger Folie 1 von 61 Prof. Dr.-Ing. Stromortskurve Asynchronmaschine Stromortskurve der Drehstrom-Asynchronmaschine mit kurzgeschlossenem Rotor
der Strombereiche für die Leistungsmessung
 Erweiterung der Strombereiche für die Leistungsmessung Yokogawa Deutschland GmbH Test- & Messtechnik 82211 Herrsching Dipl.-Ing. Matthias Preß V2.1 Dezember 2014 1 Precision Making tmi.yokogawa.com Übersicht
Erweiterung der Strombereiche für die Leistungsmessung Yokogawa Deutschland GmbH Test- & Messtechnik 82211 Herrsching Dipl.-Ing. Matthias Preß V2.1 Dezember 2014 1 Precision Making tmi.yokogawa.com Übersicht