Kybernetik Intelligent Agents- Action Selection
|
|
|
- Mohamed Oubbati
- vor 10 Jahren
- Abrufe
Transkript
1 Kybernetik Intelligent Agents- Action Selection Mohamed Oubbati Institut für Neuroinformatik Tel.: (+49) 731 / [email protected]
 731 / 50 24153 mohamed.")
2 Intelligent Agents

3 Intelligent Agents Environment Agent Intelligent Agents continuously perform 4 functions: 1. Perception (sensory data + interpretation). 2. Reasoning. 3. Decision making. 4. Action selection to affect the environment in order to meet its design objectives.

4 Intelligent Agents Agent objective Environment - Perception - Reasoning -Decision Action selection

5 Intelligent Agents Agent objective Environment - Perception - Reasoning -Decision Action selection How should the agent select actions?

6 Intelligent Agents How should the agent select actions? One way is to use architectures from control theory.

7 Intelligent Agents How should the agent select actions? Sollwert + - e Regler System Sensor

8 Intelligent Agents How should the agent select actions? Sollwert + - e Agent (action selection) Environment Sensor

9 Intelligent Agents How should the agent select actions? We consider the following control architectures 1. ON-OFF 2. PID 3. MRAC (Model Reference Adaptive Control) 4. MPC (Model Predictive Control)

10 ON-OFF Regler

11 ON-OFF Regler Diese Art der Regelung wird nur für einfache Anwendungen eingesetzt. Beispiel 1

12 ON-OFF Regler Beispiel 2: Regelung der Temperature im Backofen Soll-Wert + - ON/OFF Aktuelle Temperatur Temperatur Sensor - Der Regler schaltet "Aus", wenn die Temperatur höher als der Soll-Wert ist. - Der Regler schaltet "Ein", wenn der Soll-Wert unterschritten wird.

13 PID Regler

14 PID Regler PID-Regler besteht aus folgenden Anteilen: - Proportionalen Anteil (P-Regler) - Integralen Anteil (I-Regler) - Differentialen Anteil (D-Regler)
 - Differentialen Anteil")
15 PID Regler P-Regler Er bestimmt die Stellgröße u(t) durch Multiplikation der Regelabweichung e(t) mit einem Faktor Kp: V(t) + e(t) P-Regler u(t) System y(t) - u(t)= Kp e(t)
 + e(t) P-Regler u(t) System y(t) -")
16 PID Regler P-Regler Er bestimmt die Stellgröße u(t) durch Multiplikation der Regelabweichung e(t) mit einem Faktor Kp: V(t) + e(t) P-Regler u(t) System y(t) - u(t)= Kp e(t) - reagiert nur auf aktuellen Wert der Regelabweichung e(t) berücksichtigt nur die Gegenwart. - je größer (kleiner) die Regelabweichung e(t), desto größer (kleiner) ist die Stellgröße u(t). - Getting closer to the desired value means that the control signal u(t) does practically nothing! eine bleibende Regelabweichung.
 die Regelabweichung e(t), desto größer (kleiner) ist die Stellgröße u(t).")
17 P-Regler Simulation V(t) + - e(t) P-Regler u(t) System && y + 10 y& + 5 = u y(t)

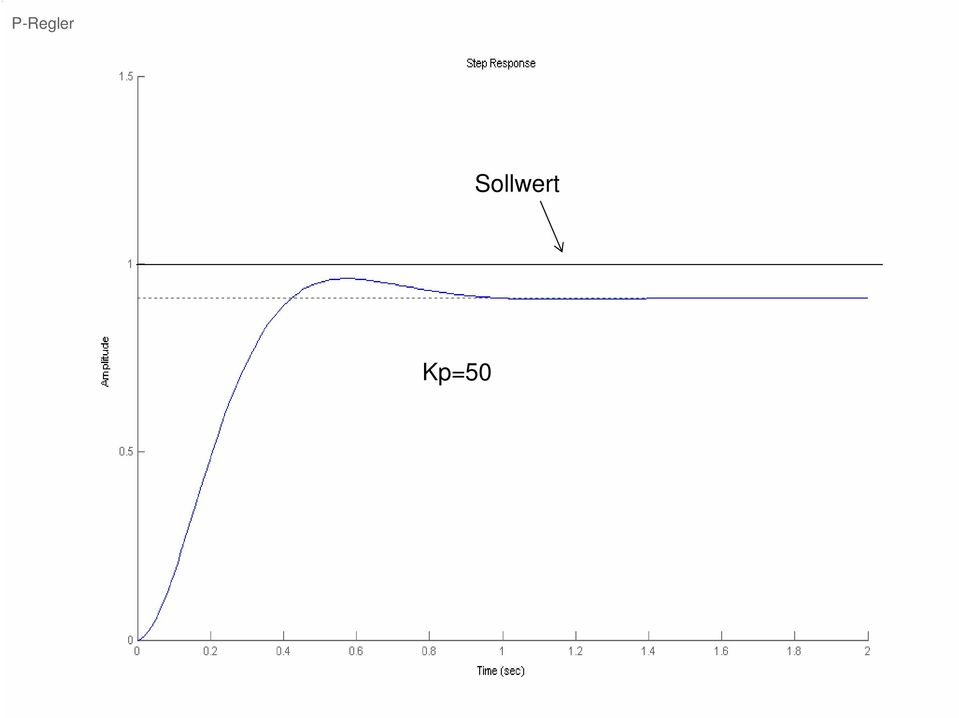
18 P-Regler Sollwert Kp=50
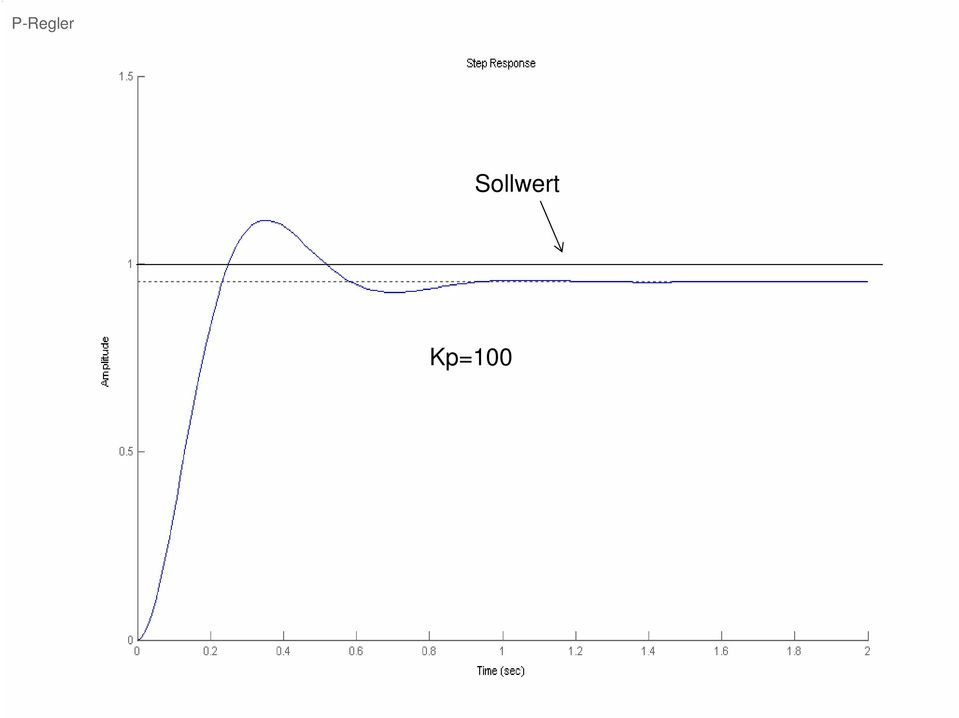
19 P-Regler Sollwert Kp=100
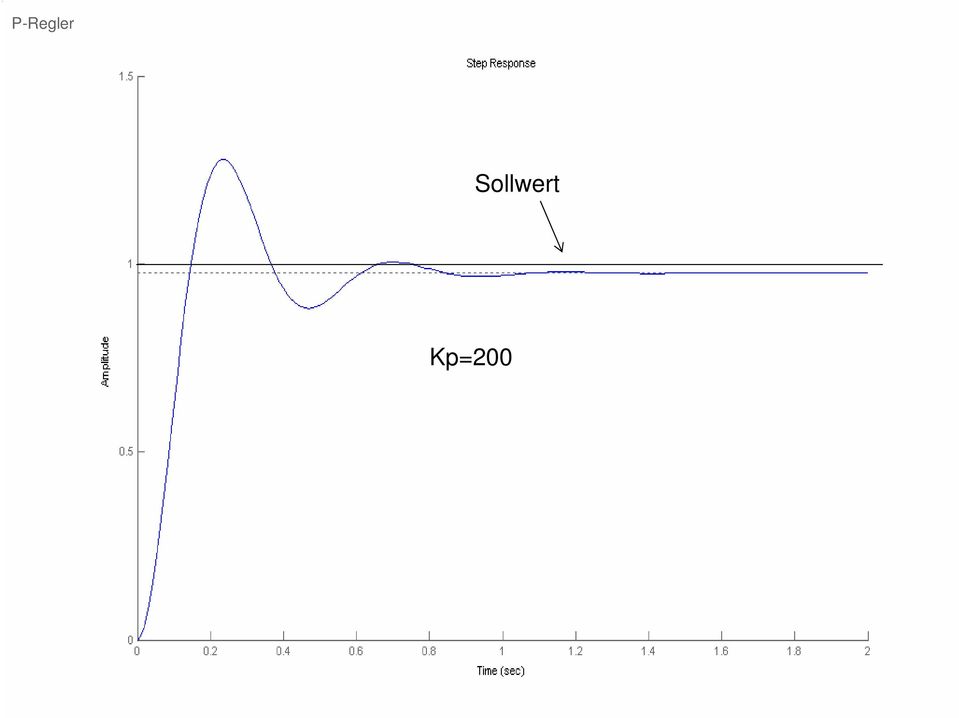
20 P-Regler Sollwert Kp=200
21 P-Regler Sollwert Kp=300
22 P-Regler P-Regler Zusammenfassung Die Regeldifferenz und die Ausregelzeit werden kleiner, wenn Kp größer gewählt wird. Aber dazu erhalt man eine stärkere Überschwingung!
23 P-Regler P-Regler einfach im Aufbau und damit relative preiswert. das Verhalten wird nur durch die Einstellung des Parameters Kp. Kp Kp bleibende Regeldifferenz Überschwingweite
24 I-Regler I-Regler Beim I-Regler (integrierender Regler) ist die Stellgröße u(t), abgesehen vom Anfangswert, proportional zum Zeitintegral der Regelabweichung e(t): V + e I-Regler u System y - u 1 ( t ) = e ( τ ) d τ k i t 0 alle zurückliegenden Werte der Regelabweichung e(t) werden integriert. berücksichtigt die Vergangenheit. Advantage If e(t) remains non-zero (even for small values) for a length of time, the control signal u(t) gets larger and larger as time goes on! keine bleibende Regelabweichung
25 I-Regler I-Regler Simulation V(t) + - e(t) I-Regler u(t) System && y + 10 y& + 5 = u y(t)
26 I-Regler Ki=0.8
27 I-Regler Ki=10
28 I-Regler Ki=30
29 I-Regler Ki=50
30 I-Regler I-Regler keine bleibende Regeldifferenz. I-Regler greift langsamer ein als P-Regler.
31 PI-Regler PI-Regler Die Kombination eines I-Reglers mit einem P-Regler führt zum PI-Regler. u 1 ( t ) = K + p e ( t ) e ( τ ) d τ k i t 0
32 PI-Regler PI-Regler Simulation V(t) + - e(t) PI-Regler u(t) System && y + 10 y& + 5 = u y(t)
33 PI-Regler PI-Regler Kp=60 Ki=30
34 PI-Regler Kp=60 Ki=30
35 PI-Regler Kp=100 Ki=90
36 PI-Regler PI-Regler - anfangs schneller als der I-Regler. - präziser als der P-Regler (keine bleibende Regeldifferenz) Einstellung von zwei Reglerparametern (Zeit Aufwand beim Tuning)
37 D-Regler D-Regler Der D-Regler (differentialer Regler) bestimmt den Stellwert aus der zeitlichen Ableitung der Regelabweichung. V + e D-Regler u System y - u ( t ) = K d de ( t ) dt -Der D-Regler reagiert auf der Änderung der Regelabweichung. - Die Änderung zeigt, wohin die Regelabweichung in der Zukunft gehen wird. berücksichtigt die Zukunft. - Je stärker die Änderung der Regelabweichung e(t), desto größer ist die Stellgröße u(t). Überschwingen wird minimiert.
38 PI-Regler D-Regler Simulation V(t) + - e(t) D-Regler u(t) System && y + 10 y& + 5 = u y(t)
39 D-Regler Sollwert Kd=50
40 D-Regler Sollwert Kd=50
41 D-Regler D-Regler greift sofort ein beim Auftreten einer Regeldifferenz. Das Überschwingen zu minimieren. - reagiert nicht auf eine konstante Regeldifferenz. - verstärkt Messrauschen.
42 PD-Regler PD-Regler Die Parallelschaltung eines D-Reglers und eines P-Reglers führt zum PD-Regler. u( t) = K e( t) + p K d de( t) dt
43 PI-Regler D-Regler Simulation V(t) + - e(t) PD-Regler u(t) System && y + 10 y& + 5 = u y(t)
44 PD-Regler Sollwert Kp=10 Kd=50
45 PD-Regler Sollwert Kp=100 Kd=60
46 PD-Regler PD-Regler sehr schneller Regler, und größere Regeldifferenz werden vermieden. bleibende Regeldifferenz tritt auf.
47 PID-Regler PID-Regler Der PID-Regler vereint die Verhaltensweisen der P-, I-, und D-Regler. u( t) 1 = K p e( t) + e( τ ) dτ + K i t 0 K d d dt e( t)
48 PI-Regler PID-Regler Simulation V(t) + - e(t) PID-Regler u(t) System && y + 10 y& + 5 = u y(t)
49 PID-Regler Sollwert Kp=300 Ki=150 Kd=80
50 PID-Regler PID-Regler - reagiert schnell - läßt keine bleibende Regeldifferenz zu - erlaubt keine großen Regelabweichungen Einstellung eines PID-Regler erfordert einen großen Zeitaufwand
51 PID-Regler Die Merkmale der elementaren PID-Regler
52 Model Reference Adaptive Control (MRAC)
53 MRAC desired output actual output reference model Regler Adjustment Mechanism System + - Das Modell-Referenz-Verfahren besteht aus dem Regler und einem Referenzmodell. Das Ziel ist dann, das dynamische Verhalten des Regelkreises in Übereinstimmung mit dem Referenzmodell zu bringen.
54 Model Predictive Control (MPC)
55 MPC desired output actual output Regler control inputs System System model Systemidentifikation Beim MPC wird zuerst ein Modell des Systems verwendet, um die zukünftigen Zustände des Systems zu berechnen (vorhersagen). Aufgrund dieser Prädiktion wird dann die geeignete Eingangssignale (control inputs) gewählt.
Einführung in die Robotik Regelung. Mohamed Oubbati Institut für Neuroinformatik. Tel.: (+49) 731 / 50 24153 [email protected] 04. 12.
 731 / 50 24153 mohamed.oubbati@uni-ulm.de 04. 12.") Einführung in die Robotik Regelung Mohamed Oubbati Institut für Neuroinformatik Tel.: (+49) 731 / 50 24153 [email protected] 04. 12. 2012 The human is perhaps the most intelligent control system
Einführung in die Robotik Regelung Mohamed Oubbati Institut für Neuroinformatik Tel.: (+49) 731 / 50 24153 [email protected] 04. 12. 2012 The human is perhaps the most intelligent control system
Kybernetik Regelung. Mohamed Oubbati Institut für Neuroinformatik. Tel.: (+49) 731 / 50 24153 [email protected] 19. 06.
 731 / 50 24153 mohamed.oubbati@uni-ulm.de 19. 06.") Kybernetik Regelung Mohamed Oubbati Institut für Neuroinformatik Tel.: (+49) 73 / 50 2453 [email protected] 9. 06. 202 Was ist Regelung? Regelung ist eine gezielte Beeinflussung dynamischer Systeme,
Kybernetik Regelung Mohamed Oubbati Institut für Neuroinformatik Tel.: (+49) 73 / 50 2453 [email protected] 9. 06. 202 Was ist Regelung? Regelung ist eine gezielte Beeinflussung dynamischer Systeme,
Autonome Mobile Systeme
 Autonome Mobile Systeme Teil II: Systemtheorie für Informatiker Dr. Mohamed Oubbati Institut für Neuroinformatik Universität Ulm SS 2007 Wiederholung vom letzten Mal! Die Übertragungsfunktion Die Übertragungsfunktion
Autonome Mobile Systeme Teil II: Systemtheorie für Informatiker Dr. Mohamed Oubbati Institut für Neuroinformatik Universität Ulm SS 2007 Wiederholung vom letzten Mal! Die Übertragungsfunktion Die Übertragungsfunktion
Kybernetik LTI-Systeme
 Kybernetik LTI-Systeme Mohamed Oubbati Institut für Neuroinformatik Tel.: (+49) 731 / 50 24153 [email protected] 26. 04. 2012 Was ist Kybernetik? environment agent Kybernetik ermöglicht, die Rückkopplung
Kybernetik LTI-Systeme Mohamed Oubbati Institut für Neuroinformatik Tel.: (+49) 731 / 50 24153 [email protected] 26. 04. 2012 Was ist Kybernetik? environment agent Kybernetik ermöglicht, die Rückkopplung
Kybernetik Systemidentifikation
 Kberneti Sstemidentifiation Mohamed Oubbati Institut für euroinformati Tel.: +49 73 / 50 2453 [email protected] 2. 06. 202 Was ist Sstemidentifiation? Der Begriff Sstemidentifiation beschreibt
Kberneti Sstemidentifiation Mohamed Oubbati Institut für euroinformati Tel.: +49 73 / 50 2453 [email protected] 2. 06. 202 Was ist Sstemidentifiation? Der Begriff Sstemidentifiation beschreibt
LTAM-T2EE-ASSER FELJC/GOERI 3. P-Regler
 3. P-Regler 3.1. Einleitung 3.1.1. Allgemeines Der Regler muss im Regelkreis dafür sorgen, dass der Istwert der Regelgröße X möglichst wenig vom Sollwert W abweicht. Das Verhalten der Regelstrecke ist
3. P-Regler 3.1. Einleitung 3.1.1. Allgemeines Der Regler muss im Regelkreis dafür sorgen, dass der Istwert der Regelgröße X möglichst wenig vom Sollwert W abweicht. Das Verhalten der Regelstrecke ist
Institut für Leistungselektronik und Elektrische Antriebe. Übungen Regelungstechnik 2
 Institut für Leistungselektronik und Elektrische Antriebe Prof. Dr.-Ing. J. Roth-Stielow Übungen Regelungstechnik 2 Inhalt der Übungen: 1. Grundlagen (Wiederholung RT1) 2. Störgrößenaufschaltung 3. Störgrößennachbildung
Institut für Leistungselektronik und Elektrische Antriebe Prof. Dr.-Ing. J. Roth-Stielow Übungen Regelungstechnik 2 Inhalt der Übungen: 1. Grundlagen (Wiederholung RT1) 2. Störgrößenaufschaltung 3. Störgrößennachbildung
Lineargleichungssysteme: Additions-/ Subtraktionsverfahren
 Lineargleichungssysteme: Additions-/ Subtraktionsverfahren W. Kippels 22. Februar 2014 Inhaltsverzeichnis 1 Einleitung 2 2 Lineargleichungssysteme zweiten Grades 2 3 Lineargleichungssysteme höheren als
Lineargleichungssysteme: Additions-/ Subtraktionsverfahren W. Kippels 22. Februar 2014 Inhaltsverzeichnis 1 Einleitung 2 2 Lineargleichungssysteme zweiten Grades 2 3 Lineargleichungssysteme höheren als
Fuzzy Logik und Genetische Algorithmen für adaptive Prozesskontrolle
 Fuzzy Logik und Genetische Algorithmen für adaptive Prozesskontrolle Umgang mit unsicherem Wissen VAK 03-711.08 Oliver Ahlbrecht 8. Dezember 2005 Struktur 1. Einleitung 2. Beispiel Cart-Pole 3. Warum Hybride
Fuzzy Logik und Genetische Algorithmen für adaptive Prozesskontrolle Umgang mit unsicherem Wissen VAK 03-711.08 Oliver Ahlbrecht 8. Dezember 2005 Struktur 1. Einleitung 2. Beispiel Cart-Pole 3. Warum Hybride
Professionelle Seminare im Bereich MS-Office
 Der Name BEREICH.VERSCHIEBEN() ist etwas unglücklich gewählt. Man kann mit der Funktion Bereiche zwar verschieben, man kann Bereiche aber auch verkleinern oder vergrößern. Besser wäre es, die Funktion
Der Name BEREICH.VERSCHIEBEN() ist etwas unglücklich gewählt. Man kann mit der Funktion Bereiche zwar verschieben, man kann Bereiche aber auch verkleinern oder vergrößern. Besser wäre es, die Funktion
Handbuch ECDL 2003 Modul 2: Computermanagement und Dateiverwaltung Der Task-Manager
 Handbuch ECDL 2003 Modul 2: Computermanagement und Dateiverwaltung Der Task-Manager Dateiname: ecdl2_03_05_documentation Speicherdatum: 22.11.2004 ECDL 2003 Modul 2 Computermanagement und Dateiverwaltung
Handbuch ECDL 2003 Modul 2: Computermanagement und Dateiverwaltung Der Task-Manager Dateiname: ecdl2_03_05_documentation Speicherdatum: 22.11.2004 ECDL 2003 Modul 2 Computermanagement und Dateiverwaltung
Simulink: Einführende Beispiele
 Simulink: Einführende Beispiele Simulink ist eine grafische Oberfläche zur Ergänzung von Matlab, mit der Modelle mathematischer, physikalischer bzw. technischer Systeme aus Blöcken mittels plug-and-play
Simulink: Einführende Beispiele Simulink ist eine grafische Oberfläche zur Ergänzung von Matlab, mit der Modelle mathematischer, physikalischer bzw. technischer Systeme aus Blöcken mittels plug-and-play
1.) Aufrufen des Programms WinFACT 7 (BORIS)
 Aufrufen des Programms WinFACT 7 (BORIS)") Dampftemperaturregelung mit WAGO und WinFACT 7 (BORIS) 1.) Aufrufen des Programms WinFACT 7 (BORIS) Über die Start Menüleiste gelangen Sie über Programme, WinFACT 7 und Blockorientierte Simulation BORIS
Dampftemperaturregelung mit WAGO und WinFACT 7 (BORIS) 1.) Aufrufen des Programms WinFACT 7 (BORIS) Über die Start Menüleiste gelangen Sie über Programme, WinFACT 7 und Blockorientierte Simulation BORIS
Einführung in die Robotik Analog-Digital und Digital-Analog Wandler
 Einführung in die Robotik Analog-Digital und Digital-Analog Wandler Mohamed Oubbati Institut für Neuroinformatik Tel.: (+49) 73 / 5 2453 [email protected] 3.. 22 Analog-Digital (A/D) Wandler Digital
Einführung in die Robotik Analog-Digital und Digital-Analog Wandler Mohamed Oubbati Institut für Neuroinformatik Tel.: (+49) 73 / 5 2453 [email protected] 3.. 22 Analog-Digital (A/D) Wandler Digital
Kybernetik Braitenberg Vehikel
 Kybernetik Braitenberg Vehikel Mohamed Oubbati Institut für Neuroinformatik Tel.: (+49) 731 / 50 24153 [email protected] 29. 05. 2012 Was ist Kybernetik? environment agent Kybernetik ermöglicht,
Kybernetik Braitenberg Vehikel Mohamed Oubbati Institut für Neuroinformatik Tel.: (+49) 731 / 50 24153 [email protected] 29. 05. 2012 Was ist Kybernetik? environment agent Kybernetik ermöglicht,
Senkung des technischen Zinssatzes und des Umwandlungssatzes
 Senkung des technischen Zinssatzes und des Umwandlungssatzes Was ist ein Umwandlungssatz? Die PKE führt für jede versicherte Person ein individuelles Konto. Diesem werden die Beiträge, allfällige Einlagen
Senkung des technischen Zinssatzes und des Umwandlungssatzes Was ist ein Umwandlungssatz? Die PKE führt für jede versicherte Person ein individuelles Konto. Diesem werden die Beiträge, allfällige Einlagen
Algorithmische Kryptographie
 Algorithmische Kryptographie Walter Unger Lehrstuhl für Informatik I 16. Februar 2007 Quantenkryptographie 1 Einleitung Grundlagen aus der Physik 2 Datenübertragung 1. Idee 2. Idee Nochmal Physik 3 Sichere
Algorithmische Kryptographie Walter Unger Lehrstuhl für Informatik I 16. Februar 2007 Quantenkryptographie 1 Einleitung Grundlagen aus der Physik 2 Datenübertragung 1. Idee 2. Idee Nochmal Physik 3 Sichere
Kybernetik Laplace Transformation
 Kybernetik Laplace Transformation Mohamed Oubbati Institut für Neuroinformatik Tel.: (+49) 73 / 50 2453 [email protected] 08. 05. 202 Laplace Transformation Was ist eine Transformation? Was ist
Kybernetik Laplace Transformation Mohamed Oubbati Institut für Neuroinformatik Tel.: (+49) 73 / 50 2453 [email protected] 08. 05. 202 Laplace Transformation Was ist eine Transformation? Was ist
FOREX und Währungsanalyse? COT Report. DollarIndex - AUD/USD? CHF/JPY? EUR/CHF, EUR/JPY, EUR/USD? GBP/CHF? NZD/JPY
 MikeC.Kock FOREX und Währungsanalyse? COT Report DollarIndex - AUD/USD? CHF/JPY? EUR/CHF, EUR/JPY, EUR/USD? GBP/CHF? NZD/JPY Fangen wir heute zuerst mit der Patternanalyse an. Gleich sieben Währungspaare
MikeC.Kock FOREX und Währungsanalyse? COT Report DollarIndex - AUD/USD? CHF/JPY? EUR/CHF, EUR/JPY, EUR/USD? GBP/CHF? NZD/JPY Fangen wir heute zuerst mit der Patternanalyse an. Gleich sieben Währungspaare
SIMULATION. example Data Transfer (XDT) Protocol. entwickelt im Rahmen der Bachelor-Arbeit. von. Tobias Weimann. User-Manual
 Protocol. entwickelt im Rahmen der Bachelor-Arbeit. von. Tobias Weimann. User-Manual") SIMULATION example Data Transfer (XDT) Protocol entwickelt im Rahmen der Bachelor-Arbeit von Tobias Weimann User-Manual Copyright 2004 Lehrstuhl Rechnernetze und Kommunikationssysteme Institut für Informatik
SIMULATION example Data Transfer (XDT) Protocol entwickelt im Rahmen der Bachelor-Arbeit von Tobias Weimann User-Manual Copyright 2004 Lehrstuhl Rechnernetze und Kommunikationssysteme Institut für Informatik
Rheinische Fachhochschule Köln
 Inhaltsverzeichnis: 1.3 Schwerpunkte und Begriffe der MSR-Technik 2 1.3.1 Steuern, Regeln, Leiten 2 1.3.1.1 Steuern 2 1.3.1.2 Regeln 4 1.3.1.3 Leiten 6 1 von 8 1.3 Schwerpunkte und Begriffe der MSR-Technik
Inhaltsverzeichnis: 1.3 Schwerpunkte und Begriffe der MSR-Technik 2 1.3.1 Steuern, Regeln, Leiten 2 1.3.1.1 Steuern 2 1.3.1.2 Regeln 4 1.3.1.3 Leiten 6 1 von 8 1.3 Schwerpunkte und Begriffe der MSR-Technik
Folgende Voraussetzungen für die Konfiguration müssen erfüllt sein: - Ein Bootimage ab Version 7.4.4. - Optional einen DHCP Server.
 1. Dynamic Host Configuration Protocol 1.1 Einleitung Im Folgenden wird die Konfiguration von DHCP beschrieben. Sie setzen den Bintec Router entweder als DHCP Server, DHCP Client oder als DHCP Relay Agent
1. Dynamic Host Configuration Protocol 1.1 Einleitung Im Folgenden wird die Konfiguration von DHCP beschrieben. Sie setzen den Bintec Router entweder als DHCP Server, DHCP Client oder als DHCP Relay Agent
Teambildung. 1 Einleitung. 2 Messen der Produktivität
 1 Einleitung Teambildung In der Entwicklung, speziell bei hohem Softwareanteil, stellen Personalkosten den primären Kostenanteil dar. Daher ist es wichtig, den Personalbedarf optimal zu bestimmen. You
1 Einleitung Teambildung In der Entwicklung, speziell bei hohem Softwareanteil, stellen Personalkosten den primären Kostenanteil dar. Daher ist es wichtig, den Personalbedarf optimal zu bestimmen. You
GDI - Lohn & Gehalt Umstieg auf Firebird 2.5
 Umstieg auf Firebird 2.5 14.06.2012 Für den Umstieg auf Firebird 2.5 ist es erforderlich, die Datenbankstruktur zu aktualisieren. Dieser Vorgang wird "Datenbank-Upgrade" genannt. Damit kann eine ältere
Umstieg auf Firebird 2.5 14.06.2012 Für den Umstieg auf Firebird 2.5 ist es erforderlich, die Datenbankstruktur zu aktualisieren. Dieser Vorgang wird "Datenbank-Upgrade" genannt. Damit kann eine ältere
Erweiterung der Aufgabe. Die Notenberechnung soll nicht nur für einen Schüler, sondern für bis zu 35 Schüler gehen:
 VBA Programmierung mit Excel Schleifen 1/6 Erweiterung der Aufgabe Die Notenberechnung soll nicht nur für einen Schüler, sondern für bis zu 35 Schüler gehen: Es müssen also 11 (B L) x 35 = 385 Zellen berücksichtigt
VBA Programmierung mit Excel Schleifen 1/6 Erweiterung der Aufgabe Die Notenberechnung soll nicht nur für einen Schüler, sondern für bis zu 35 Schüler gehen: Es müssen also 11 (B L) x 35 = 385 Zellen berücksichtigt
Grundlagen der Elektro-Proportionaltechnik
 Grundlagen der Elektro-Proportionaltechnik Totband Ventilverstärkung Hysterese Linearität Wiederholbarkeit Auflösung Sprungantwort Frequenzantwort - Bode Analyse Der Arbeitsbereich, in dem innerhalb von
Grundlagen der Elektro-Proportionaltechnik Totband Ventilverstärkung Hysterese Linearität Wiederholbarkeit Auflösung Sprungantwort Frequenzantwort - Bode Analyse Der Arbeitsbereich, in dem innerhalb von
Künstliches binäres Neuron
 Künstliches binäres Neuron G.Döben-Henisch Fachbereich Informatik und Ingenieurwissenschaften FH Frankfurt am Main University of Applied Sciences D-60318 Frankfurt am Main Germany Email: doeben at fb2.fh-frankfurt.de
Künstliches binäres Neuron G.Döben-Henisch Fachbereich Informatik und Ingenieurwissenschaften FH Frankfurt am Main University of Applied Sciences D-60318 Frankfurt am Main Germany Email: doeben at fb2.fh-frankfurt.de
Technical Note Nr. 101
 Seite 1 von 6 DMS und Schleifringübertrager-Schaltungstechnik Über Schleifringübertrager können DMS-Signale in exzellenter Qualität übertragen werden. Hierbei haben sowohl die physikalischen Eigenschaften
Seite 1 von 6 DMS und Schleifringübertrager-Schaltungstechnik Über Schleifringübertrager können DMS-Signale in exzellenter Qualität übertragen werden. Hierbei haben sowohl die physikalischen Eigenschaften
Zusammenfassung der 8. Vorlesung
 Zusammenfassung der 8. Vorlesung Beschreibung und und Analyse dynamischer Systeme im im Zustandsraum Steuerbarkeit eines dynamischen Systems Unterscheidung: Zustandssteuerbarkeit, Zustandserreichbarkeit
Zusammenfassung der 8. Vorlesung Beschreibung und und Analyse dynamischer Systeme im im Zustandsraum Steuerbarkeit eines dynamischen Systems Unterscheidung: Zustandssteuerbarkeit, Zustandserreichbarkeit
Projekt 2HEA 2005/06 Formelzettel Elektrotechnik
 Projekt 2HEA 2005/06 Formelzettel Elektrotechnik Teilübung: Kondensator im Wechselspannunskreis Gruppenteilnehmer: Jakic, Topka Abgabedatum: 24.02.2006 Jakic, Topka Inhaltsverzeichnis 2HEA INHALTSVERZEICHNIS
Projekt 2HEA 2005/06 Formelzettel Elektrotechnik Teilübung: Kondensator im Wechselspannunskreis Gruppenteilnehmer: Jakic, Topka Abgabedatum: 24.02.2006 Jakic, Topka Inhaltsverzeichnis 2HEA INHALTSVERZEICHNIS
DSO. Abtastrate und Speichertiefe
 DSO Abtastrate und Speichertiefe Inhalt Inhalt...- 1 - Feine Signaldetails und lange Abtastzeiträume...- 2 - Was ein großer Speicher bewirkt...- 2 - Einfluss der Oszilloskop-Architektur auf die Update-Rate...-
DSO Abtastrate und Speichertiefe Inhalt Inhalt...- 1 - Feine Signaldetails und lange Abtastzeiträume...- 2 - Was ein großer Speicher bewirkt...- 2 - Einfluss der Oszilloskop-Architektur auf die Update-Rate...-
Kybernetik Übertragungsfunktion
 Kybernetik Übertragungsfunktion Mohamed Oubbati Institut für Neuroinformatik Tel.: (49) 731 / 50 24153 [email protected] 15. 05. 2012 Übertragungsfunktion Wie reagiert ein LTI System auf ein beliebiges
Kybernetik Übertragungsfunktion Mohamed Oubbati Institut für Neuroinformatik Tel.: (49) 731 / 50 24153 [email protected] 15. 05. 2012 Übertragungsfunktion Wie reagiert ein LTI System auf ein beliebiges
How to do? Projekte - Zeiterfassung
 How to do? Projekte - Zeiterfassung Stand: Version 4.0.1, 18.03.2009 1. EINLEITUNG...3 2. PROJEKTE UND STAMMDATEN...4 2.1 Projekte... 4 2.2 Projektmitarbeiter... 5 2.3 Tätigkeiten... 6 2.4 Unterprojekte...
How to do? Projekte - Zeiterfassung Stand: Version 4.0.1, 18.03.2009 1. EINLEITUNG...3 2. PROJEKTE UND STAMMDATEN...4 2.1 Projekte... 4 2.2 Projektmitarbeiter... 5 2.3 Tätigkeiten... 6 2.4 Unterprojekte...
Stellvertretenden Genehmiger verwalten. Tipps & Tricks
 Tipps & Tricks INHALT SEITE 1. Grundlegende Informationen 3 2.1 Aktivieren eines Stellvertretenden Genehmigers 4 2.2 Deaktivieren eines Stellvertretenden Genehmigers 11 2 1. Grundlegende Informationen
Tipps & Tricks INHALT SEITE 1. Grundlegende Informationen 3 2.1 Aktivieren eines Stellvertretenden Genehmigers 4 2.2 Deaktivieren eines Stellvertretenden Genehmigers 11 2 1. Grundlegende Informationen
Grundlagen der Videotechnik. Redundanz
 Grundlagen der Videotechnik Redundanz Redundanz beruht auf: - statistischen Abhängigkeiten im Signal, - Information, die vorher schon gesendet wurde - generell eine Art Gedächtnis im Signal Beispiel: Ein
Grundlagen der Videotechnik Redundanz Redundanz beruht auf: - statistischen Abhängigkeiten im Signal, - Information, die vorher schon gesendet wurde - generell eine Art Gedächtnis im Signal Beispiel: Ein
Der Anschluss an einen Computer
 Firmware version: 2.1 GUI version: 2.1 Board version: siehe Abbildung Der Anschluss an einen Computer Man verbindet das Controllerboard mit dem PC mit einem USB-Kabel und natürlich den Sensor mit dem entsprechenden
Firmware version: 2.1 GUI version: 2.1 Board version: siehe Abbildung Der Anschluss an einen Computer Man verbindet das Controllerboard mit dem PC mit einem USB-Kabel und natürlich den Sensor mit dem entsprechenden
Controlling Konzepte für pneumatische Muskeln
 Controlling Konzepte für pneumatische Muskeln Ausarbeitung im Rahmen des Seminars Humanoide Roboter von Sebastian Adelstein WS04/05 Inhaltsverzeichnis Der McKibben Muskel...3 Einführung in die Regelungstheorie...3
Controlling Konzepte für pneumatische Muskeln Ausarbeitung im Rahmen des Seminars Humanoide Roboter von Sebastian Adelstein WS04/05 Inhaltsverzeichnis Der McKibben Muskel...3 Einführung in die Regelungstheorie...3
DAUERHAFTE ÄNDERUNG VON SCHRIFTART, SCHRIFTGRÖßE
 DAUERHAFTE ÄNDERUNG VON SCHRIFTART, SCHRIFTGRÖßE UND ZEILENABSTAND Word 2010 und 2007 Jedes neue leere Dokument, das mit Word 2010 erstellt wird, basiert auf einer Dokumentvorlage mit dem Namen Normal.dotx.
DAUERHAFTE ÄNDERUNG VON SCHRIFTART, SCHRIFTGRÖßE UND ZEILENABSTAND Word 2010 und 2007 Jedes neue leere Dokument, das mit Word 2010 erstellt wird, basiert auf einer Dokumentvorlage mit dem Namen Normal.dotx.
Regelungs- und Systemtechnik 1. Kapitel 1: Einführung
 Regelungs- und Systemtechnik 1 Kapitel 1: Einführung Prof. Dr.-Ing. Pu Li Fachgebiet Simulation und Optimale Prozesse (SOP) Luft- und Raumfahrtindustrie Zu regelnde Größen: Position Geschwindigkeit Beschleunigung
Regelungs- und Systemtechnik 1 Kapitel 1: Einführung Prof. Dr.-Ing. Pu Li Fachgebiet Simulation und Optimale Prozesse (SOP) Luft- und Raumfahrtindustrie Zu regelnde Größen: Position Geschwindigkeit Beschleunigung
Usability ohne Maus und ohne Bildschirm
 Usability ohne Maus und ohne Bildschirm Referent: Jan Eric Hellbusch Publikationen Buch "Barrierefreies Webdesign" (1. Auflage 2005, 391 Seiten) bf-w.de/dpunkt/ KnowWare-Heft "Barrierefreies Webdesign"
Usability ohne Maus und ohne Bildschirm Referent: Jan Eric Hellbusch Publikationen Buch "Barrierefreies Webdesign" (1. Auflage 2005, 391 Seiten) bf-w.de/dpunkt/ KnowWare-Heft "Barrierefreies Webdesign"
Das Recht auf gesundheitliche Versorgung ein Menschenrecht!
 Das Recht auf gesundheitliche Versorgung ein Menschenrecht! Ein Positionspapier des Bundesverbands evangelische Behindertenhilfe e.v. Sätze zum Recht auf gesundheitliche Versorgung in leichter Sprache
Das Recht auf gesundheitliche Versorgung ein Menschenrecht! Ein Positionspapier des Bundesverbands evangelische Behindertenhilfe e.v. Sätze zum Recht auf gesundheitliche Versorgung in leichter Sprache
Primzahlen und RSA-Verschlüsselung
 Primzahlen und RSA-Verschlüsselung Michael Fütterer und Jonathan Zachhuber 1 Einiges zu Primzahlen Ein paar Definitionen: Wir bezeichnen mit Z die Menge der positiven und negativen ganzen Zahlen, also
Primzahlen und RSA-Verschlüsselung Michael Fütterer und Jonathan Zachhuber 1 Einiges zu Primzahlen Ein paar Definitionen: Wir bezeichnen mit Z die Menge der positiven und negativen ganzen Zahlen, also
Definition 3.1: Ein Differentialgleichungssystem 1. Ordnung
 Kapitel 3 Dynamische Systeme Definition 31: Ein Differentialgleichungssystem 1 Ordnung = f(t, y) ; y R N ; f : R R N R N heißt namisches System auf dem Phasenraum R N Der Parameter t wird die Zeit genannt
Kapitel 3 Dynamische Systeme Definition 31: Ein Differentialgleichungssystem 1 Ordnung = f(t, y) ; y R N ; f : R R N R N heißt namisches System auf dem Phasenraum R N Der Parameter t wird die Zeit genannt
Verwendung von LS-OPT zur Generierung von Materialkarten am Beispiel von Schaumwerkstoffen
 Verwendung von LS-OPT zur Generierung von Materialkarten am Beispiel von Schaumwerkstoffen Katharina Witowski (DYNAmore GmbH) Peter Reithofer (4a engineering GmbH) Übersicht Problemstellung Parameteridentifikation
Verwendung von LS-OPT zur Generierung von Materialkarten am Beispiel von Schaumwerkstoffen Katharina Witowski (DYNAmore GmbH) Peter Reithofer (4a engineering GmbH) Übersicht Problemstellung Parameteridentifikation
Unterrichtsmaterialien in digitaler und in gedruckter Form. Auszug aus: Übungsbuch für den Grundkurs mit Tipps und Lösungen: Analysis
 Unterrichtsmaterialien in digitaler und in gedruckter Form Auszug aus: Übungsbuch für den Grundkurs mit Tipps und Lösungen: Analysis Das komplette Material finden Sie hier: Download bei School-Scout.de
Unterrichtsmaterialien in digitaler und in gedruckter Form Auszug aus: Übungsbuch für den Grundkurs mit Tipps und Lösungen: Analysis Das komplette Material finden Sie hier: Download bei School-Scout.de
KI im Weltall: Der Remote Agent
 KI im Weltall: Der Remote Agent Proseminar Künstliche Intelligenz Ulrich Tschaffon Universität Ulm Einleitung A Einleitung Remote Agent Intelligentes Steuerungsprogramm eines Raumgefährtes Wozu braucht
KI im Weltall: Der Remote Agent Proseminar Künstliche Intelligenz Ulrich Tschaffon Universität Ulm Einleitung A Einleitung Remote Agent Intelligentes Steuerungsprogramm eines Raumgefährtes Wozu braucht
K L A U S U R D E C K B L A T T
 K L A U S U R D E C K B L A T T Name der Prüfung: Einführung in die Robotik Datum und Uhrzeit: 16.04.2014 um 11Uhr Bearbeitungszeit: : Institut: Neuroinformatik Prüfer: Oubbati Vom Prüfungsteilnehmer auszufüllen:
K L A U S U R D E C K B L A T T Name der Prüfung: Einführung in die Robotik Datum und Uhrzeit: 16.04.2014 um 11Uhr Bearbeitungszeit: : Institut: Neuroinformatik Prüfer: Oubbati Vom Prüfungsteilnehmer auszufüllen:
Aktuell 2014 als Startseite der PK-Website auf Firefox einstellen
 SG April 2014 Aktuell 2014 als Startseite der PK-Website auf Firefox einstellen Stand 21.04.2014 PK 2014-1/58 Seite 1 von 5 Seiten Von den Besuchern der PK-Website verwenden inzwischen 54 % die Browser
SG April 2014 Aktuell 2014 als Startseite der PK-Website auf Firefox einstellen Stand 21.04.2014 PK 2014-1/58 Seite 1 von 5 Seiten Von den Besuchern der PK-Website verwenden inzwischen 54 % die Browser
Matrix42. Use Case - Sicherung und Rücksicherung persönlicher Einstellungen über Personal Backup. Version 1.0.0. 23. September 2015 - 1 -
 Matrix42 Use Case - Sicherung und Rücksicherung persönlicher Version 1.0.0 23. September 2015-1 - Inhaltsverzeichnis 1 Einleitung 3 1.1 Beschreibung 3 1.2 Vorbereitung 3 1.3 Ziel 3 2 Use Case 4-2 - 1 Einleitung
Matrix42 Use Case - Sicherung und Rücksicherung persönlicher Version 1.0.0 23. September 2015-1 - Inhaltsverzeichnis 1 Einleitung 3 1.1 Beschreibung 3 1.2 Vorbereitung 3 1.3 Ziel 3 2 Use Case 4-2 - 1 Einleitung
ecall sms & fax-portal
 ecall sms & fax-portal Beschreibung des s Dateiname Beschreibung_-_eCall 2015.08.04 Version 1.1 Datum 04.08.2015 Dolphin Systems AG Informieren & Alarmieren Samstagernstrasse 45 CH-8832 Wollerau Tel. +41
ecall sms & fax-portal Beschreibung des s Dateiname Beschreibung_-_eCall 2015.08.04 Version 1.1 Datum 04.08.2015 Dolphin Systems AG Informieren & Alarmieren Samstagernstrasse 45 CH-8832 Wollerau Tel. +41
Kondensatoren ( Verdichter, von lat.: condensus: dichtgedrängt, bezogen auf die elektrischen Ladungen)
") Der Kondensator Kondensatoren ( Verdichter, von lat.: condensus: dichtgedrängt, bezogen auf die elektrischen Ladungen) Kondensatoren sind Bauelemente, welche elektrische Ladungen bzw. elektrische Energie
Der Kondensator Kondensatoren ( Verdichter, von lat.: condensus: dichtgedrängt, bezogen auf die elektrischen Ladungen) Kondensatoren sind Bauelemente, welche elektrische Ladungen bzw. elektrische Energie
Modellbildungssysteme: Pädagogische und didaktische Ziele
 Modellbildungssysteme: Pädagogische und didaktische Ziele Was hat Modellbildung mit der Schule zu tun? Der Bildungsplan 1994 formuliert: "Die schnelle Zunahme des Wissens, die hohe Differenzierung und
Modellbildungssysteme: Pädagogische und didaktische Ziele Was hat Modellbildung mit der Schule zu tun? Der Bildungsplan 1994 formuliert: "Die schnelle Zunahme des Wissens, die hohe Differenzierung und
Thermoguard. Thermoguard CIM Custom Integration Module Version 2.70
 Thermoguard Thermoguard CIM Custom Integration Module Version 2.70 Inhalt - Einleitung... 3 - Voraussetzungen... 3 - Aktivierung und Funktion der Schnittstelle... 3 - Parameter... 4 - NLS-Einfluss... 4
Thermoguard Thermoguard CIM Custom Integration Module Version 2.70 Inhalt - Einleitung... 3 - Voraussetzungen... 3 - Aktivierung und Funktion der Schnittstelle... 3 - Parameter... 4 - NLS-Einfluss... 4
Gezielt über Folien hinweg springen
 Gezielt über Folien hinweg springen Nehmen wir an, Sie haben eine relativ große Präsentation. Manchmal möchten Sie über Folien hinweg zu anderen Folien springen. Das kann vorkommen, weil Sie den gesamten
Gezielt über Folien hinweg springen Nehmen wir an, Sie haben eine relativ große Präsentation. Manchmal möchten Sie über Folien hinweg zu anderen Folien springen. Das kann vorkommen, weil Sie den gesamten
Charakteristikenmethode im Beispiel
 Charakteristikenmethode im Wir betrachten die PDE in drei Variablen xu x + yu y + (x + y )u z = 0. Das charakteristische System lautet dann ẋ = x ẏ = y ż = x + y und besitzt die allgemeine Lösung x(t)
Charakteristikenmethode im Wir betrachten die PDE in drei Variablen xu x + yu y + (x + y )u z = 0. Das charakteristische System lautet dann ẋ = x ẏ = y ż = x + y und besitzt die allgemeine Lösung x(t)
Zeichen bei Zahlen entschlüsseln
 Zeichen bei Zahlen entschlüsseln In diesem Kapitel... Verwendung des Zahlenstrahls Absolut richtige Bestimmung von absoluten Werten Operationen bei Zahlen mit Vorzeichen: Addieren, Subtrahieren, Multiplizieren
Zeichen bei Zahlen entschlüsseln In diesem Kapitel... Verwendung des Zahlenstrahls Absolut richtige Bestimmung von absoluten Werten Operationen bei Zahlen mit Vorzeichen: Addieren, Subtrahieren, Multiplizieren
Vertical-Spreads Iron Condor Erfolgsaussichten
 www.mumorex.ch 08.03.2015 1 Eigenschaften Erwartung Preis Long Calls Long Puts Kombination mit Aktien Vertical-Spreads Iron Condor Erfolgsaussichten www.mumorex.ch 08.03.2015 2 www.mumorex.ch 08.03.2015
www.mumorex.ch 08.03.2015 1 Eigenschaften Erwartung Preis Long Calls Long Puts Kombination mit Aktien Vertical-Spreads Iron Condor Erfolgsaussichten www.mumorex.ch 08.03.2015 2 www.mumorex.ch 08.03.2015
Simulation LIF5000. Abbildung 1
 Simulation LIF5000 Abbildung 1 Zur Simulation von analogen Schaltungen verwende ich Ltspice/SwitcherCAD III. Dieses Programm ist sehr leistungsfähig und wenn man weis wie, dann kann man damit fast alles
Simulation LIF5000 Abbildung 1 Zur Simulation von analogen Schaltungen verwende ich Ltspice/SwitcherCAD III. Dieses Programm ist sehr leistungsfähig und wenn man weis wie, dann kann man damit fast alles
Projektmanagement für Ingenieure
 Springer Vieweg PLUS Zusatzinformationen zu Medien von Springer Vieweg Projektmanagement für Ingenieure Ein praxisnahes Lehrbuch für den systematischen Projekterfolg 2013 2. Auflage Kapitel 9 Lösungen
Springer Vieweg PLUS Zusatzinformationen zu Medien von Springer Vieweg Projektmanagement für Ingenieure Ein praxisnahes Lehrbuch für den systematischen Projekterfolg 2013 2. Auflage Kapitel 9 Lösungen
IBIS Professional. z Dokumentation zur Dublettenprüfung
 z Dokumentation zur Dublettenprüfung Die Dublettenprüfung ist ein Zusatzpaket zur IBIS-Shopverwaltung für die Classic Line 3.4 und höher. Dubletten entstehen dadurch, dass viele Kunden beim Bestellvorgang
z Dokumentation zur Dublettenprüfung Die Dublettenprüfung ist ein Zusatzpaket zur IBIS-Shopverwaltung für die Classic Line 3.4 und höher. Dubletten entstehen dadurch, dass viele Kunden beim Bestellvorgang
teischl.com Software Design & Services e.u. [email protected] www.teischl.com/booknkeep www.facebook.com/booknkeep
 teischl.com Software Design & Services e.u. [email protected] www.teischl.com/booknkeep www.facebook.com/booknkeep 1. Erstellen Sie ein neues Rechnungsformular Mit book n keep können Sie nun Ihre eigenen
teischl.com Software Design & Services e.u. [email protected] www.teischl.com/booknkeep www.facebook.com/booknkeep 1. Erstellen Sie ein neues Rechnungsformular Mit book n keep können Sie nun Ihre eigenen
SMP Financial Engineering GmbH Begleitmaterial zum Softwarepaket CheckForTrend des Nanotraders bzw. der Futurestation
 SMP Financial Engineering GmbH Begleitmaterial zum Softwarepaket CheckForTrend des Nanotraders bzw. der Futurestation Dies ist keine Empfehlung zum Kauf oder Verkauf von Aktien, Aktienderivaten, Futures
SMP Financial Engineering GmbH Begleitmaterial zum Softwarepaket CheckForTrend des Nanotraders bzw. der Futurestation Dies ist keine Empfehlung zum Kauf oder Verkauf von Aktien, Aktienderivaten, Futures
Gimp Kurzanleitung. Offizielle Gimp Seite: http://www.gimp.org/
 Gimp Kurzanleitung Offizielle Gimp Seite: http://www.gimp.org/ Inhalt Seite 2 Seite 3-4 Seite 5-6 Seite 7 8 Seite 9 10 Seite 11-12 Ein Bild mit Gimp öffnen. Ein Bild mit Gimp verkleinern. Ein bearbeitetes
Gimp Kurzanleitung Offizielle Gimp Seite: http://www.gimp.org/ Inhalt Seite 2 Seite 3-4 Seite 5-6 Seite 7 8 Seite 9 10 Seite 11-12 Ein Bild mit Gimp öffnen. Ein Bild mit Gimp verkleinern. Ein bearbeitetes
2. Negative Dualzahlen darstellen
 2.1 Subtraktion von Dualzahlen 2.1.1 Direkte Subtraktion (Tafelrechnung) siehe ARCOR T0IF Nachteil dieser Methode: Diese Form der Subtraktion kann nur sehr schwer von einer Elektronik (CPU) durchgeführt
2.1 Subtraktion von Dualzahlen 2.1.1 Direkte Subtraktion (Tafelrechnung) siehe ARCOR T0IF Nachteil dieser Methode: Diese Form der Subtraktion kann nur sehr schwer von einer Elektronik (CPU) durchgeführt
Regelungstechnik 1 Praktikum Versuch 1.1. 1 Unterschied zwischen Steuerung und Regelung Reglereinstellung mittels Schwingversuch
 Regelungstechnik 1 Praktikum Versuch 1.1 1 nterschied zwischen Steuerung und Regelung Reglereinstellung mittels Schwingversuch Die Aufgabe der Regelungstechnik besteht im weitesten Sinne darin, einen bestimmten
Regelungstechnik 1 Praktikum Versuch 1.1 1 nterschied zwischen Steuerung und Regelung Reglereinstellung mittels Schwingversuch Die Aufgabe der Regelungstechnik besteht im weitesten Sinne darin, einen bestimmten
Bedienungsanleitung für den Online-Shop
 Hier sind die Produktgruppen zu finden. Zur Produktgruppe gibt es eine Besonderheit: - Seite 1 von 18 - Zuerst wählen Sie einen Drucker-Hersteller aus. Dann wählen Sie das entsprechende Drucker- Modell
Hier sind die Produktgruppen zu finden. Zur Produktgruppe gibt es eine Besonderheit: - Seite 1 von 18 - Zuerst wählen Sie einen Drucker-Hersteller aus. Dann wählen Sie das entsprechende Drucker- Modell
Reinforcement Learning
 Effiziente Darstellung von Daten Reinforcement Learning 02. Juli 2004 Jan Schlößin Einordnung Was ist Reinforcement Learning? Einführung - Prinzip der Agent Eigenschaften das Ziel Q-Learning warum Q-Learning
Effiziente Darstellung von Daten Reinforcement Learning 02. Juli 2004 Jan Schlößin Einordnung Was ist Reinforcement Learning? Einführung - Prinzip der Agent Eigenschaften das Ziel Q-Learning warum Q-Learning
Anbindung des eibport an das Internet
 Anbindung des eibport an das Internet Ein eibport wird mit einem lokalen Router mit dem Internet verbunden. Um den eibport über diesen Router zu erreichen, muss die externe IP-Adresse des Routers bekannt
Anbindung des eibport an das Internet Ein eibport wird mit einem lokalen Router mit dem Internet verbunden. Um den eibport über diesen Router zu erreichen, muss die externe IP-Adresse des Routers bekannt
AGROPLUS Buchhaltung. Daten-Server und Sicherheitskopie. Version vom 21.10.2013b
 AGROPLUS Buchhaltung Daten-Server und Sicherheitskopie Version vom 21.10.2013b 3a) Der Daten-Server Modus und der Tresor Der Daten-Server ist eine Betriebsart welche dem Nutzer eine grosse Flexibilität
AGROPLUS Buchhaltung Daten-Server und Sicherheitskopie Version vom 21.10.2013b 3a) Der Daten-Server Modus und der Tresor Der Daten-Server ist eine Betriebsart welche dem Nutzer eine grosse Flexibilität
erster Hauptsatz der Thermodynamik,
 1.2 Erster Hautsatz der hermodynamik Wir betrachten ein thermodynamisches System, dem wir eine beliebige Wärmemenge δq zuführen, und an dem wir eine Arbeit da leisten wollen. Werden umgekehrt dem System
1.2 Erster Hautsatz der hermodynamik Wir betrachten ein thermodynamisches System, dem wir eine beliebige Wärmemenge δq zuführen, und an dem wir eine Arbeit da leisten wollen. Werden umgekehrt dem System
Auktionen erstellen und verwalten mit dem GV Büro System und der Justiz Auktion
 Auktionen erstellen und verwalten mit dem GV Büro System und der Justiz Auktion Workshop Software GmbH Siemensstr. 21 47533 Kleve 02821 / 731 20 02821 / 731 299 www.workshop-software.de Verfasser: SK [email protected]
Auktionen erstellen und verwalten mit dem GV Büro System und der Justiz Auktion Workshop Software GmbH Siemensstr. 21 47533 Kleve 02821 / 731 20 02821 / 731 299 www.workshop-software.de Verfasser: SK [email protected]
Systemen im Wandel. Autor: Dr. Gerd Frenzen Coromell GmbH Seite 1 von 5
 Das Management von Informations- Systemen im Wandel Die Informations-Technologie (IT) war lange Zeit ausschließlich ein Hilfsmittel, um Arbeitsabläufe zu vereinfachen und Personal einzusparen. Sie hat
Das Management von Informations- Systemen im Wandel Die Informations-Technologie (IT) war lange Zeit ausschließlich ein Hilfsmittel, um Arbeitsabläufe zu vereinfachen und Personal einzusparen. Sie hat
Rohstoffanalyse - COT Daten - Gold, Fleischmärkte, Orangensaft, Crude Oil, US Zinsen, S&P500 - KW 07/2009
 MikeC.Kock Rohstoffanalyse - COT Daten - Gold, Fleischmärkte, Orangensaft, Crude Oil, US Zinsen, S&P500 - KW 07/2009 Zwei Märkte stehen seit Wochen im Mittelpunkt aller Marktteilnehmer? Gold und Crude
MikeC.Kock Rohstoffanalyse - COT Daten - Gold, Fleischmärkte, Orangensaft, Crude Oil, US Zinsen, S&P500 - KW 07/2009 Zwei Märkte stehen seit Wochen im Mittelpunkt aller Marktteilnehmer? Gold und Crude
Elektronenstrahloszilloskop
 - - Axel Günther 0..00 laudius Knaak Gruppe 7 (Dienstag) Elektronenstrahloszilloskop Einleitung: In diesem Versuch werden die Ein- und Ausgangssignale verschiedener Testobjekte gemessen, auf dem Oszilloskop
- - Axel Günther 0..00 laudius Knaak Gruppe 7 (Dienstag) Elektronenstrahloszilloskop Einleitung: In diesem Versuch werden die Ein- und Ausgangssignale verschiedener Testobjekte gemessen, auf dem Oszilloskop
Leichtathletik Datenverarbeitung Handbuch für Ausrichter
 http://ladv.de/handbuch November, 2012 Leichtathletik Datenverarbeitung Handbuch für Ausrichter Jugend trainiert für Olympia Entwickler Marc Schunk Julian Michel Pascal Burkhardt Handbuch Dolf Klein Copyright
http://ladv.de/handbuch November, 2012 Leichtathletik Datenverarbeitung Handbuch für Ausrichter Jugend trainiert für Olympia Entwickler Marc Schunk Julian Michel Pascal Burkhardt Handbuch Dolf Klein Copyright
Diskussionshilfe zum Thema: mit Ergebnissen der Wareneingangskontrolle
 Vergleich der Angaben in Datenblättern mit Ergebnissen der Wareneingangskontrolle H. Mehling Ausgangssituation Messtechnischer Hintergrund Diskussion: gespeicherte Wärmemenge Ausgangssituation Zusammenhang
Vergleich der Angaben in Datenblättern mit Ergebnissen der Wareneingangskontrolle H. Mehling Ausgangssituation Messtechnischer Hintergrund Diskussion: gespeicherte Wärmemenge Ausgangssituation Zusammenhang
Informatik 2 Labor 2 Programmieren in MATLAB Georg Richter
 Informatik 2 Labor 2 Programmieren in MATLAB Georg Richter Aufgabe 3: Konto Um Geldbeträge korrekt zu verwalten, sind zwecks Vermeidung von Rundungsfehlern entweder alle Beträge in Cents umzuwandeln und
Informatik 2 Labor 2 Programmieren in MATLAB Georg Richter Aufgabe 3: Konto Um Geldbeträge korrekt zu verwalten, sind zwecks Vermeidung von Rundungsfehlern entweder alle Beträge in Cents umzuwandeln und
Der naldo-offline-handyfahrplan
 Der naldo-offline-handyfahrplan Erste Schritte mit dem neuen naldo-offline-handyfahrplan Bedienungsanleitung Inhaltsverzeichnis: 1. Erster Programmstart 2. Die Programmbedienung 3. Favoriten 4. Meine Fahrten
Der naldo-offline-handyfahrplan Erste Schritte mit dem neuen naldo-offline-handyfahrplan Bedienungsanleitung Inhaltsverzeichnis: 1. Erster Programmstart 2. Die Programmbedienung 3. Favoriten 4. Meine Fahrten
Windows XP Jugendschutz einrichten. Monika Pross Molberger PC-Kurse
 Windows XP Jugendschutz einrichten Monika Pross Molberger PC-Kurse Um ein Benutzerkonto mit Jugendschutzeinstellungen zu verwenden, braucht man ein Eltern- Konto (Administrator) und eine Kinderkonto (Standard).
Windows XP Jugendschutz einrichten Monika Pross Molberger PC-Kurse Um ein Benutzerkonto mit Jugendschutzeinstellungen zu verwenden, braucht man ein Eltern- Konto (Administrator) und eine Kinderkonto (Standard).
Laborübung Gegentaktendstufe Teil 1
 Inhaltsverzeichnis 1.0 Zielsetzung...2 2.0 Grundlegendes zu Gegentaktverstärkern...2 3.0 Aufgabenstellung...3 Gegeben:...3 3.1.0 Gegentaktverstärker bei B-Betrieb...3 3.1.1 Dimensionierung des Gegentaktverstärkers
Inhaltsverzeichnis 1.0 Zielsetzung...2 2.0 Grundlegendes zu Gegentaktverstärkern...2 3.0 Aufgabenstellung...3 Gegeben:...3 3.1.0 Gegentaktverstärker bei B-Betrieb...3 3.1.1 Dimensionierung des Gegentaktverstärkers
Unterrichtsmaterialien in digitaler und in gedruckter Form. Auszug aus:
 Unterrichtsmaterialien in digitaler und in gedruckter Form Auszug aus: If-clauses - conditional sentences - Nie mehr Probleme mit Satzbau im Englischen! Das komplette Material finden Sie hier: School-Scout.de
Unterrichtsmaterialien in digitaler und in gedruckter Form Auszug aus: If-clauses - conditional sentences - Nie mehr Probleme mit Satzbau im Englischen! Das komplette Material finden Sie hier: School-Scout.de
Reglement der Verwaltungskommission der Kantonalen Pensionskasse Schaffhausen zur Bildung von technischen Rückstellungen
 85.03 Reglement der Verwaltungskommission der Kantonalen Pensionskasse Schaffhausen zur Bildung von technischen Rückstellungen vom 3. Dezember 006 Die Verwaltungskommission der Kantonalen Pensionskasse
85.03 Reglement der Verwaltungskommission der Kantonalen Pensionskasse Schaffhausen zur Bildung von technischen Rückstellungen vom 3. Dezember 006 Die Verwaltungskommission der Kantonalen Pensionskasse
Warum kann ein Flugzeug fliegen?
 4. Dezember 2003 Warum kann ein Flugzeug fliegen? Wer oder was kann fliegen? Warum können Hexen und Harry Potter fliegen? Joanne K. Rowling / Carlsen Verlag GmbH Weil sie zaubern können! Wer oder was kann
4. Dezember 2003 Warum kann ein Flugzeug fliegen? Wer oder was kann fliegen? Warum können Hexen und Harry Potter fliegen? Joanne K. Rowling / Carlsen Verlag GmbH Weil sie zaubern können! Wer oder was kann
Konvertieren von Settingsdateien
 Konvertieren von Settingsdateien Mit SetEdit können sie jedes der von diesem Programm unterstützten Settingsformate in jedes andere unterstützte Format konvertieren, sofern Sie das passende Modul (in Form
Konvertieren von Settingsdateien Mit SetEdit können sie jedes der von diesem Programm unterstützten Settingsformate in jedes andere unterstützte Format konvertieren, sofern Sie das passende Modul (in Form
Skalierung des Ausgangssignals
 Skalierung des Ausgangssignals Definition der Messkette Zur Bestimmung einer unbekannten Messgröße, wie z.b. Kraft, Drehmoment oder Beschleunigung, werden Sensoren eingesetzt. Sensoren stehen am Anfang
Skalierung des Ausgangssignals Definition der Messkette Zur Bestimmung einer unbekannten Messgröße, wie z.b. Kraft, Drehmoment oder Beschleunigung, werden Sensoren eingesetzt. Sensoren stehen am Anfang
Datensicherung und Wiederherstellung
 Dokumentation Datensicherung und Wiederherstellung Versionsverzeichnis Version: Datum: Revisionsgrund: Version 1.0 Januar 2011 Erste Ausgabe www.babe-informatik.ch 1/7 Datensicherung von Voraussetzung
Dokumentation Datensicherung und Wiederherstellung Versionsverzeichnis Version: Datum: Revisionsgrund: Version 1.0 Januar 2011 Erste Ausgabe www.babe-informatik.ch 1/7 Datensicherung von Voraussetzung
Wie Sie mit Mastern arbeiten
 Wie Sie mit Mastern arbeiten Was ist ein Master? Einer der großen Vorteile von EDV besteht darin, dass Ihnen der Rechner Arbeit abnimmt. Diesen Vorteil sollten sie nutzen, wo immer es geht. In PowerPoint
Wie Sie mit Mastern arbeiten Was ist ein Master? Einer der großen Vorteile von EDV besteht darin, dass Ihnen der Rechner Arbeit abnimmt. Diesen Vorteil sollten sie nutzen, wo immer es geht. In PowerPoint
Informationsblatt Induktionsbeweis
 Sommer 015 Informationsblatt Induktionsbeweis 31. März 015 Motivation Die vollständige Induktion ist ein wichtiges Beweisverfahren in der Informatik. Sie wird häufig dazu gebraucht, um mathematische Formeln
Sommer 015 Informationsblatt Induktionsbeweis 31. März 015 Motivation Die vollständige Induktion ist ein wichtiges Beweisverfahren in der Informatik. Sie wird häufig dazu gebraucht, um mathematische Formeln
Erfahrungen mit Hartz IV- Empfängern
 Erfahrungen mit Hartz IV- Empfängern Ausgewählte Ergebnisse einer Befragung von Unternehmen aus den Branchen Gastronomie, Pflege und Handwerk Pressegespräch der Bundesagentur für Arbeit am 12. November
Erfahrungen mit Hartz IV- Empfängern Ausgewählte Ergebnisse einer Befragung von Unternehmen aus den Branchen Gastronomie, Pflege und Handwerk Pressegespräch der Bundesagentur für Arbeit am 12. November
Speicher in der Cloud
 Speicher in der Cloud Kostenbremse, Sicherheitsrisiko oder Basis für die unternehmensweite Kollaboration? von Cornelius Höchel-Winter 2013 ComConsult Research GmbH, Aachen 3 SYNCHRONISATION TEUFELSZEUG
Speicher in der Cloud Kostenbremse, Sicherheitsrisiko oder Basis für die unternehmensweite Kollaboration? von Cornelius Höchel-Winter 2013 ComConsult Research GmbH, Aachen 3 SYNCHRONISATION TEUFELSZEUG
Würfelt man dabei je genau 10 - mal eine 1, 2, 3, 4, 5 und 6, so beträgt die Anzahl. der verschiedenen Reihenfolgen, in denen man dies tun kann, 60!.
 040304 Übung 9a Analysis, Abschnitt 4, Folie 8 Die Wahrscheinlichkeit, dass bei n - maliger Durchführung eines Zufallexperiments ein Ereignis A ( mit Wahrscheinlichkeit p p ( A ) ) für eine beliebige Anzahl
040304 Übung 9a Analysis, Abschnitt 4, Folie 8 Die Wahrscheinlichkeit, dass bei n - maliger Durchführung eines Zufallexperiments ein Ereignis A ( mit Wahrscheinlichkeit p p ( A ) ) für eine beliebige Anzahl
ZfP-Sonderpreis der DGZfP beim Regionalwettbewerb Jugend forscht BREMERHAVEN. Der Zauberwürfel-Roboter. Paul Giese. Schule: Wilhelm-Raabe-Schule
 ZfP-Sonderpreis der DGZfP beim Regionalwettbewerb Jugend forscht BREMERHAVEN Der Zauberwürfel-Roboter Paul Giese Schule: Wilhelm-Raabe-Schule Jugend forscht 2013 Kurzfassung Regionalwettbewerb Bremerhaven
ZfP-Sonderpreis der DGZfP beim Regionalwettbewerb Jugend forscht BREMERHAVEN Der Zauberwürfel-Roboter Paul Giese Schule: Wilhelm-Raabe-Schule Jugend forscht 2013 Kurzfassung Regionalwettbewerb Bremerhaven
Besonderheiten und Einstellungen von BLDC-Motoren
 Besonderheiten und Einstellungen von BLDC-Motoren Besonderheiten von BLDC-Motoren Übung: Konfigurieren Sie die Eingänge 1 bis 3 low-aktiv. Besonderheiten von BLDC- Motoren auf der Registerkarte "Input"
Besonderheiten und Einstellungen von BLDC-Motoren Besonderheiten von BLDC-Motoren Übung: Konfigurieren Sie die Eingänge 1 bis 3 low-aktiv. Besonderheiten von BLDC- Motoren auf der Registerkarte "Input"
Wie ist das Wissen von Jugendlichen über Verhütungsmethoden?
 Forschungsfragen zu Verhütung 1 Forschungsfragen zu Verhütung Wie ist das Wissen von Jugendlichen über Verhütungsmethoden? Wie viel Information über Verhütung ist enthalten? Wie wird das Thema erklärt?
Forschungsfragen zu Verhütung 1 Forschungsfragen zu Verhütung Wie ist das Wissen von Jugendlichen über Verhütungsmethoden? Wie viel Information über Verhütung ist enthalten? Wie wird das Thema erklärt?
Makroökonomie II: Vorlesung Nr. 2. Die offene Volkswirtschaft bei vollständiger Kapitalmobilität (Mundell- Fleming-Analyse)
") Makroökonomie II: Vorlesung Nr. 2 Die offene Volkswirtschaft bei vollständiger Kapitalmobilität (Mundell- Fleming-Analyse) Makro II/Vorlesung Nr. 2 1 Zusammenfassung 1. Komparativ-statische IS-LM Analyse
Makroökonomie II: Vorlesung Nr. 2 Die offene Volkswirtschaft bei vollständiger Kapitalmobilität (Mundell- Fleming-Analyse) Makro II/Vorlesung Nr. 2 1 Zusammenfassung 1. Komparativ-statische IS-LM Analyse
Downloadfehler in DEHSt-VPSMail. Workaround zum Umgang mit einem Downloadfehler
 Downloadfehler in DEHSt-VPSMail Workaround zum Umgang mit einem Downloadfehler Downloadfehler bremen online services GmbH & Co. KG Seite 2 Inhaltsverzeichnis Vorwort...3 1 Fehlermeldung...4 2 Fehlerbeseitigung...5
Downloadfehler in DEHSt-VPSMail Workaround zum Umgang mit einem Downloadfehler Downloadfehler bremen online services GmbH & Co. KG Seite 2 Inhaltsverzeichnis Vorwort...3 1 Fehlermeldung...4 2 Fehlerbeseitigung...5
RT-E: Entwurf der Drehzahlregelung eines Gebläsemotors
 RT-E: Entwurf der Drehzahlregelung eines Gebläsemotors Quelle: http://de.wikipedia.org/w/index.php?title=datei:radialventilator- Wellringrad.jpg&filetimestamp=20061128101719 (Stand: 26.09.2012) Martin
RT-E: Entwurf der Drehzahlregelung eines Gebläsemotors Quelle: http://de.wikipedia.org/w/index.php?title=datei:radialventilator- Wellringrad.jpg&filetimestamp=20061128101719 (Stand: 26.09.2012) Martin
Algorithmen und Datenstrukturen
 Algorithmen und Datenstrukturen Dipl. Inform. Andreas Wilkens 1 Organisatorisches Freitag, 05. Mai 2006: keine Vorlesung! aber Praktikum von 08.00 11.30 Uhr (Gruppen E, F, G, H; Vortestat für Prototyp)
Algorithmen und Datenstrukturen Dipl. Inform. Andreas Wilkens 1 Organisatorisches Freitag, 05. Mai 2006: keine Vorlesung! aber Praktikum von 08.00 11.30 Uhr (Gruppen E, F, G, H; Vortestat für Prototyp)
Digitale Signaturen. Sven Tabbert
 Digitale Signaturen Sven Tabbert Inhalt: Digitale Signaturen 1. Einleitung 2. Erzeugung Digitaler Signaturen 3. Signaturen und Einweg Hashfunktionen 4. Digital Signature Algorithmus 5. Zusammenfassung
Digitale Signaturen Sven Tabbert Inhalt: Digitale Signaturen 1. Einleitung 2. Erzeugung Digitaler Signaturen 3. Signaturen und Einweg Hashfunktionen 4. Digital Signature Algorithmus 5. Zusammenfassung