Materialflusssystemen
|
|
|
- Gerburg Ziegler
- vor 9 Jahren
- Abrufe
Transkript

1 Seite 1 / 21
2 Topographieerfassung und Berechnung von Bewegungsbahnen für Instandhaltungseinheiten auf Materialflusssystemen Dipl.-Ing. Matthias Bücker Dipl.-Ing. Tobias Brutscheck Teilprojektleiter: Prof. Dr. Bernd Kuhlenkötter Seite 2 / 21



3 Gliederung Einleitung Aufbau der Instandhaltungseinheit Automatische Fahrsteuerung Topographieerfassung Lokale Bahnplanung Bewegungssteuerung Zusammenfassung und Ausblick Seite 3 / 21

4 Automatisierte Instandhaltung Automatisierte Instandhaltung mit mobilem Roboter: Mobile Einheit i fährt zur Instandhaltungsstelle ll Durchführung der Instandhaltung Mechanische Fixierung Programmadaption Programmausführung Bewegung zur nächsten Einsatzstelle Seite 4 / 21




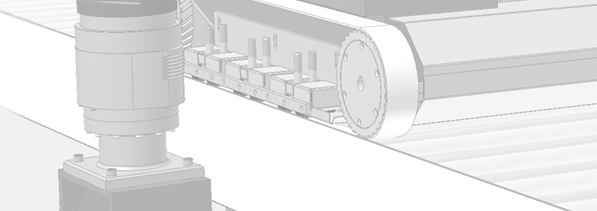
5 Systembeschreibung Hauptkomponenten der Instandhaltungseinheit MIRO Mobile Plattform mit Raupenfahrwerk Roboterarm zur Führung von Sensoren /Aktoren Steuerungskomponenten Seite 5 / 21



6 Steuerungsstruktur Instandhaltungsvorgang wird gestartet Auftragsliste wird gelesen Bewegung g zum Ziel erforderlich Positionsbestimmung und Berechnung des Weges im Programmteil Navigation Automatische Fahrsteuerung Fahrbahnerkennung Lokale Bahnplanung Bewegungssteuerung Seite 6 / 21
7 Automatische Fahrsteuerung Aufgaben der automatischen Fahrsteuerung Erkennung der Fahrbahn Berechnung eines lokalen Bewegungspfades Steuerung der Bewegung g Herausforderungen Untergrund uneben und löcherig Unterschiedliche Farben und Reflexionseigenschaften Bewegungsbahn muss in enger Toleranz berechnet werden Keine seitliche Bewegung mit der Plattform möglich Seite 7 / 21










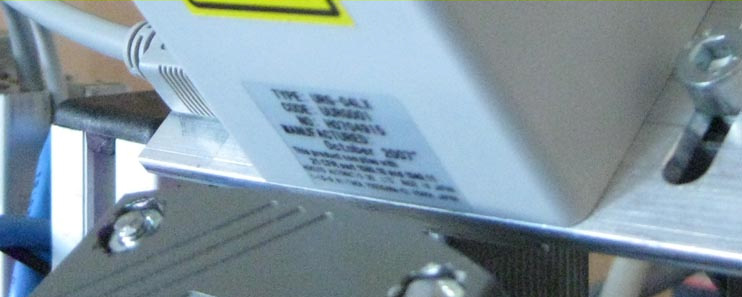

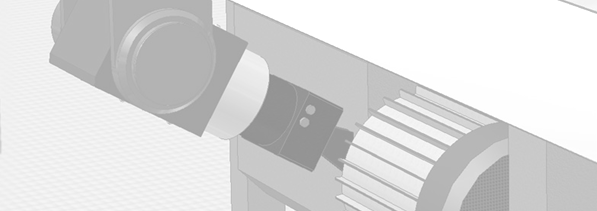
8 Wichtige Sensoren Systembeschreibung Laserscanner: Bahnerkennung, Lokalisierung Gyroskop: Bewegungserfassung, Stabilisierung PMD: Bahnerkennung, Hinderniserkennung Seite 8 / 21
9 Fahrbahnerkennung Aufgaben der Fahrbahnerkennung Erfassung der befahrbaren Bereiche Erfassung von Hindernissen Erfassung von Vertiefungen Bereitstellung einer Datenbasis für die lokale Bahnplanung Herausforderungen 3D-Erfassung notwendig Erfassungsbereich der Sensoren beschränkt Berücksichtigung Messfehlern Reflexionen Geometrische Fehler Rauschen Seite 9 / 21
10 Fahrbahnerkennung g Fahrbahnerkennung durch Topographieerfassung Unebene und löchrige Bahnstruktur Glänzende Oberflächen Geringer g Abstand zwischen min. Objekthöhe j und Rauschen Seite 10 / 21
11 Funktionsweise Kartenerstellung Messwerte werden höhenbasiert klassifiziert Ergebnisse werden in Belegungskarte eingetragen Seite 11 / 21





12 Ergebnis der Kartenerstellung Belegungskarte Fahrbahn h Hindernissen Vertiefungen Mögliche Fehler Lücken Falsch erkannte Hindernisse Berücksichtigung bei lokaler l Bahnplanung möglich Seite 12 / 21
13 Lokale Bahnplanung Lokale Bahnplanung Generierung von Bahnen für die Bewegungssteuerung Definition von lokalen Zielpunkten (Nahziel) Anweisungsliste für Zielauswahl von Navigation vorgegeben g Bahn folgen (+ Länge) Links/ Rechts halten (+ Länge) Geradeaus fahren (+ Länge) Drehen (+ Winkel) Herausforderungen Ermittlung der Fahrspur aus der Karte Erkennung von Verzweigungssituationen Seite 13 / 21





14 Berechnung der Nahziele Lokale Bahnplanung Kartenabtastung in definierten Suchbereichen Gefundene Kantenpunkte werden in Segmenten gemittelt Berechnung der Randvektoren Situationsermittlung Strategieauswahl nach Anweisungsliste Berechnung des nächsten Nahziels auf Basis der Randvektoren Seite 14 / 21




15 Plausibilitätsprüfung Plausibilitätsprüfung der Bereichssuche Suchbereiche werden linear abgetastet Ergebnis wird pro Tastlinie gespeichert Bei Hindernissen/Vertiefungen erfolgt Plausibilitätsprüfung Betrachtung von Nachbarzellen und Messhäufigkeiten???????? Seite 15 / 21



16 Kollisionsprüfung Sicherheitsüberprüfungen Prüfung auf Basis der Außengeometrie Stabilitätsprüfung Überschneidungen der Außengeometrie zulässig Prüfung auf Basis einer Sicherheitszone um den Schwerpunkt Zulässige Zustände Unzulässige Zustände Seite 16 / 21
17 Bewegungssteuerung Bewegungssteuerung g g Bewegung zum Nahziel mit definiertem Pfad Ausführung von Rangierbewegungen Feininterpolation notwendig Herausforderungen Lineare Bewegung zum Ziel ungeeignet Schlupfausgleich notwendig (insbesondere Drehfehler) Lineare Bewegung zum Zielpunkt Seite 17 / 21
18 Bewegungssteuerung g g Bewegungssteuerung auf Basis von Bezier-Kurven Kreisbögen lassen sich gut approximieren Graden und S-Kurven möglich Teilbarkeit der Bahn erlaubt Berechnung von Korrekturen Seite 18 / 21
19 Evaluierung Evaluierung Verfahren zur Bewegungsplanung am Demonstrator erprobt: Bahn wird zuverlässig erkannt Abzweigungen werden zuverlässig erkannt Strategie an Verzweigungen g kann durch Anweisungsliste bestimmt werden Geschwindigkeit der Kartengenerierung durch Sensorik begrenzt (bis 100 mm/s) Schnellere Scanner, 2D Sensoren Sichere automatische Behandlung von Kollisionssituationen erfordert zusätzliche Sensorik Größere Erfassungswinkel Sensoren für beide Fahrtrichtungen Seite 19 / 21
20 Kartenerstellung und Bahnplanung Seite 20 / 21
21 Kartenerstellung und Bahnplanung Seite 21 / 21
22 Zusammenfassung Zusammenfassung und Ausblick Die automatische Fahrsteuerung ist für den Einsatz der mobilen Instandhaltungseinheit notwendig Verfahren für folgende Teilprobleme wurden vorgesellt: Bahnerfassung und Erstellung einer lokalen Karte Bahnplanung Bewegungssteuerung Die Verfahren wurden evaluiert Ausblick Kopplung von Navigation und Fahrsteuerung Zusammenführung des Gesamtsystems aus mobiler Plattform und sensorisch geführtem Roboterarm Seite 22 / 21
23 Topographieerfassung und Berechnung von Bewegungsbahnen für Instandhaltungseinheiten auf Materialflusssystemen Dipl.-Ing. Matthias Bücker Dipl.-Ing. Tobias Brutscheck Teilprojektleiter: Prof. Dr. Bernd Kuhlenkötter Seite 23 / 21
24 Funktionsweise Kartenerstellung Seite 24 / 21
Entwicklung eines mobilen Roboters für die automatisierte Instandhaltung von Materialflusssystemen
 Entwicklung eines mobilen Roboters für die automatisierte Instandhaltung von Materialflusssystemen Von der Fakultät Maschinenbau der Technischen Universität Dortmund zur Erlangung des Grades eines Doktor-Ingenieurs
Entwicklung eines mobilen Roboters für die automatisierte Instandhaltung von Materialflusssystemen Von der Fakultät Maschinenbau der Technischen Universität Dortmund zur Erlangung des Grades eines Doktor-Ingenieurs
Teach-In für die 3D-Scan Akquise mit einem Roboter. Teach-In für die 3D-Scanakquise mit einem mobilen Roboter
 Teach-In für die 3D-Scan Akquise mit einem Roboter DoritStruckmeier, Borrmann Dorit Oldenburger 2017 Oliver Borrmann,3D-Tage Andreas Nüchter 1 Zielsetzung der Arbeit Ein mobiler Roboter fährt einen angelernten
Teach-In für die 3D-Scan Akquise mit einem Roboter DoritStruckmeier, Borrmann Dorit Oldenburger 2017 Oliver Borrmann,3D-Tage Andreas Nüchter 1 Zielsetzung der Arbeit Ein mobiler Roboter fährt einen angelernten
Intelligente Transportsysteme
 Intelligente Transportsysteme Universität Ulm Fakultät für Informatik Proseminar Künstliche Intelligenz SS 2004 Michael Arnold Typen intelligenter Transportsysteme Fahrer-Assistenz-Systeme Mensch hat Kontrolle
Intelligente Transportsysteme Universität Ulm Fakultät für Informatik Proseminar Künstliche Intelligenz SS 2004 Michael Arnold Typen intelligenter Transportsysteme Fahrer-Assistenz-Systeme Mensch hat Kontrolle
Sturzvermeidung von zweibeinigen Robotern durch reflexartige Reaktionen
 Sturzvermeidung von zweibeinigen Robotern durch reflexartige Reaktionen Oliver Höhn Appelstr. 11, 30167 Hannover http://www.irt.uni-hannover.de Page: 2 Gliederung Motivation Falluntersuchungen Sensorik
Sturzvermeidung von zweibeinigen Robotern durch reflexartige Reaktionen Oliver Höhn Appelstr. 11, 30167 Hannover http://www.irt.uni-hannover.de Page: 2 Gliederung Motivation Falluntersuchungen Sensorik
Modellgestützte Online-Programmierverfahren für Industrieroboter
 Modellgestützte Online-Programmierverfahren für Industrieroboter 40. Sitzung des FA 4.13 Steuerung und Regelung von Robotern Universität Karlsruhe(TH) Institut für Prozessrechentechnik,Automation und Robotik
Modellgestützte Online-Programmierverfahren für Industrieroboter 40. Sitzung des FA 4.13 Steuerung und Regelung von Robotern Universität Karlsruhe(TH) Institut für Prozessrechentechnik,Automation und Robotik
3D-Sensoren auf PMD-Basis zur Objekterkennung und -verfolgung
 3D-Sensoren auf PMD-Basis zur Objekterkennung und -verfolgung Dipl.-Phys. Hartmut Eigenbrod 10 Jahre Fraunhofer-Allianz Vision Erlangen, 26. Oktober 2007 1 Gliederung Laufzeitkameras und ihre Vor- und
3D-Sensoren auf PMD-Basis zur Objekterkennung und -verfolgung Dipl.-Phys. Hartmut Eigenbrod 10 Jahre Fraunhofer-Allianz Vision Erlangen, 26. Oktober 2007 1 Gliederung Laufzeitkameras und ihre Vor- und
Bahnplanung am stationären Hindernis
 Bahnplanung am stationären Hindernis von Ilona Blanck 01. Dez 2008 im Rahmen der Seminar Ring Vorlesung des Masterstudiums Informatik der Fakultät Technik und Informatik der HAW Hamburg Übersicht 1. Motivation
Bahnplanung am stationären Hindernis von Ilona Blanck 01. Dez 2008 im Rahmen der Seminar Ring Vorlesung des Masterstudiums Informatik der Fakultät Technik und Informatik der HAW Hamburg Übersicht 1. Motivation
Die Teleoperation als Ansatz zur fahrerlosen Fahrzeugführung
 Die Teleoperation als Ansatz zur fahrerlosen Fahrzeugführung Sebastian Gnatzig, Erick Haas, Prof. Dr. Markus Lienkamp Gliederung Einleitung Stand der Technik Vorgehen Durchführung Diskussion Zusammenfassung
Die Teleoperation als Ansatz zur fahrerlosen Fahrzeugführung Sebastian Gnatzig, Erick Haas, Prof. Dr. Markus Lienkamp Gliederung Einleitung Stand der Technik Vorgehen Durchführung Diskussion Zusammenfassung
Hindernisumfahrung eines autonomen Roboters in einer unbekannten statischen Umgebung. Ronny Menzel
 Hindernisumfahrung eines autonomen Roboters in einer unbekannten statischen Umgebung. Ronny Menzel Inhalt Aufgabenstellung Begriffserklärung Hindernisumfahrungsstrategien Anforderungen an die Hindernisumfahrung
Hindernisumfahrung eines autonomen Roboters in einer unbekannten statischen Umgebung. Ronny Menzel Inhalt Aufgabenstellung Begriffserklärung Hindernisumfahrungsstrategien Anforderungen an die Hindernisumfahrung
LiDAR Mobile Mapping
 Institut für Kartographie und Geoinformatik Leibniz Universität Hannover LiDAR Mobile Mapping Visualisierung, Vermessung, Fahrerassistenz [email protected] IKG Erfassungsfahrzeug Riegl
Institut für Kartographie und Geoinformatik Leibniz Universität Hannover LiDAR Mobile Mapping Visualisierung, Vermessung, Fahrerassistenz [email protected] IKG Erfassungsfahrzeug Riegl
Roboterassistierte Reponierung von Oberschenkelfrakturen
 Roboterassistierte Reponierung von Oberschenkelfrakturen Ralf Westphal 1, Simon Winkelbach 1, Friedrich Wahl 1, Markus Oszwald 2, Thomas Gösling 2, Tobias Hüfner 2, Christian Krettek 2, 1 2 Inhalt Einleitung
Roboterassistierte Reponierung von Oberschenkelfrakturen Ralf Westphal 1, Simon Winkelbach 1, Friedrich Wahl 1, Markus Oszwald 2, Thomas Gösling 2, Tobias Hüfner 2, Christian Krettek 2, 1 2 Inhalt Einleitung
Arbeitsblatt: Wie rede ich mit einem Roboter?
 Arbeitsblatt: Wie rede ich mit einem Roboter? Ausgangslage: Ein Roboter besitzt Sensoren, um seine Umgebung wahrzunehmen, und Aktoren, um seine Umgebung zu beeinflussen. Auch Menschen besitzen Sensoren
Arbeitsblatt: Wie rede ich mit einem Roboter? Ausgangslage: Ein Roboter besitzt Sensoren, um seine Umgebung wahrzunehmen, und Aktoren, um seine Umgebung zu beeinflussen. Auch Menschen besitzen Sensoren
Aktivitäten mit dem Roboter Thymio II für die Einführung in die Informatik und Robotik
 Aktivitäten mit dem Roboter Thymio II für die Einführung in die Informatik und Robotik Diese Aktivitäten beruhen auf Aufgaben, die mit dem Roboter Thymio II durchgeführt werden sollen, entworfen für die
Aktivitäten mit dem Roboter Thymio II für die Einführung in die Informatik und Robotik Diese Aktivitäten beruhen auf Aufgaben, die mit dem Roboter Thymio II durchgeführt werden sollen, entworfen für die
Automatischer Kursachsen- Generator AUGE. Rolf R. Huber ibh Ingenieurbüro Huber
 zurück zum Programm zur Kurzfassung Automatischer Kursachsen- Generator AUGE Rolf R. Huber ibh Ingenieurbüro Huber 1 Zielsetzung Automatische Erzeugung optimaler Kursachsen und Ermittlung des zugehörigen
zurück zum Programm zur Kurzfassung Automatischer Kursachsen- Generator AUGE Rolf R. Huber ibh Ingenieurbüro Huber 1 Zielsetzung Automatische Erzeugung optimaler Kursachsen und Ermittlung des zugehörigen
Out of the box: Flexible fahrerlose Transportfahrzeuge für den Mittelstand
 Institut für Integrierte Produktion Hannover Out of the box: Flexible fahrerlose Transportfahrzeuge für den Mittelstand Dr. Björn Eilert, IPH - Institut für Integrierte Produktion ggmbh BVL-Forum Solution
Institut für Integrierte Produktion Hannover Out of the box: Flexible fahrerlose Transportfahrzeuge für den Mittelstand Dr. Björn Eilert, IPH - Institut für Integrierte Produktion ggmbh BVL-Forum Solution
Segmentierung und Datenapproximation von Laserscanneraufnahmen mittels statistischer Methoden
 Segmentierung und Datenapproximation von Laserscanneraufnahmen mittels statistischer Methoden Ingo Neumann, Jens-André Paffenholz und Nico Lindenthal GEODÄTISCHES INSTITUT HANNOVER Session: Laserscanning
Segmentierung und Datenapproximation von Laserscanneraufnahmen mittels statistischer Methoden Ingo Neumann, Jens-André Paffenholz und Nico Lindenthal GEODÄTISCHES INSTITUT HANNOVER Session: Laserscanning
Quadrocopters and it s Applications: Overview of State of the Art Techniques
 : Overview of State of the Art Techniques Visual Tracking for Robotic Applications Sebastian Brunner Lehrstuhl für Echtzeitsysteme und Robotik Technische Universität München Email: [email protected] Date:
: Overview of State of the Art Techniques Visual Tracking for Robotic Applications Sebastian Brunner Lehrstuhl für Echtzeitsysteme und Robotik Technische Universität München Email: [email protected] Date:
Sichere Steuerungstechnik für die Mensch-Roboter Kooperation
 Sichere Steuerungstechnik für die Mensch-Roboter Kooperation Koordinator Forschungs- und Verbundprojekte REIS ROBOTICS Obernburg / Main Folie 1 Übersicht Erweiterte Funktionen einer sicheren Robotersteuerung
Sichere Steuerungstechnik für die Mensch-Roboter Kooperation Koordinator Forschungs- und Verbundprojekte REIS ROBOTICS Obernburg / Main Folie 1 Übersicht Erweiterte Funktionen einer sicheren Robotersteuerung
IdentPro Intralogistiklösungen für. Rostock, 01. Juni 2016
 IdentPro Intralogistiklösungen für Rostock, 01. Juni 2016 IdentPro Intralogistiklösungen für Seehafen Wismar I N D U S T R I E 4.0 Teilnehmer Herr Groß Herr Peters Herr Rudat Herr Kremp Wismar, 16. Novemberr
IdentPro Intralogistiklösungen für Rostock, 01. Juni 2016 IdentPro Intralogistiklösungen für Seehafen Wismar I N D U S T R I E 4.0 Teilnehmer Herr Groß Herr Peters Herr Rudat Herr Kremp Wismar, 16. Novemberr
Improving the Accuracy of GPS
 Improving the Accuracy of GPS Stephan Kopf, Thomas King, Wolfgang Effelsberg Lehrstuhl für Praktische Informatik IV Universität Mannheim Gliederung Motivation ierungsfehler von GPS Steigerung der Genauigkeit
Improving the Accuracy of GPS Stephan Kopf, Thomas King, Wolfgang Effelsberg Lehrstuhl für Praktische Informatik IV Universität Mannheim Gliederung Motivation ierungsfehler von GPS Steigerung der Genauigkeit
Uberblick 1. Problemstellung 2. Kongurationsraum 3. Bewegungsplanung fur einen Punktroboter 4. Minkowski Summen 5. Pseudo-Scheiben 6. Bewegungsplanung
 Vorlesung Geometrische Algorithmen Bewegungsplanung fur Roboter (Robot Motion Planning) Sven Schuierer Uberblick 1. Problemstellung 2. Kongurationsraum 3. Bewegungsplanung fur einen Punktroboter 4. Minkowski
Vorlesung Geometrische Algorithmen Bewegungsplanung fur Roboter (Robot Motion Planning) Sven Schuierer Uberblick 1. Problemstellung 2. Kongurationsraum 3. Bewegungsplanung fur einen Punktroboter 4. Minkowski
Ein Structure and Motion Ansatz zur Umfeldrekonstruktion in komplexen Fahrzeugumgebungen
 Sicherheit durch Fahrerassistenz 2010 Ein Structure and Motion Ansatz zur Umfeldrekonstruktion in komplexen Fahrzeugumgebungen Wojciech Derendarz, Thorsten Graf Volkswagen AG Friedrich M. Wahl TU Braunschweig,
Sicherheit durch Fahrerassistenz 2010 Ein Structure and Motion Ansatz zur Umfeldrekonstruktion in komplexen Fahrzeugumgebungen Wojciech Derendarz, Thorsten Graf Volkswagen AG Friedrich M. Wahl TU Braunschweig,
Verkehrslageberechnung mit Floating Car Data und GIP Karl Rehrl, Salzburg Research Präsentation beim GIP Day 2014, 4.7.
 Verkehrslageberechnung mit Floating Car Data und GIP Karl Rehrl, Salzburg Research Präsentation beim GIP Day 2014, 4.7.2014 Überblick 2 1. Motivation 2. Prinzip der Verkehrslageberechnung mit FCD 3. Erkennung
Verkehrslageberechnung mit Floating Car Data und GIP Karl Rehrl, Salzburg Research Präsentation beim GIP Day 2014, 4.7.2014 Überblick 2 1. Motivation 2. Prinzip der Verkehrslageberechnung mit FCD 3. Erkennung
Umsetzung eines Online-SLAM-Verfahrens auf der Roboterplattform VolksBot-Lab
 Umsetzung eines Online-SLAM-Verfahrens auf der Roboterplattform VolksBot-Lab Bachelorarbeit Frank Engelhardt Institut für Verteilte Systeme Gliederung Motivation Problemexposition Lösungsverfahren Zeitverhalten
Umsetzung eines Online-SLAM-Verfahrens auf der Roboterplattform VolksBot-Lab Bachelorarbeit Frank Engelhardt Institut für Verteilte Systeme Gliederung Motivation Problemexposition Lösungsverfahren Zeitverhalten
10. Vermessungsingenieurtag Workshop 3 Mobile Mapping an der HFT Stuttgart
 10. Vermessungsingenieurtag Workshop 3 Mobile Mapping an der HFT Stuttgart M.Eng. Marius Ziegler Projektleiter: Prof. Dr. M. Hahn 07. November 2014 Mobile Mapping Kernelemente Messgeräte zur Positionsbestimmung
10. Vermessungsingenieurtag Workshop 3 Mobile Mapping an der HFT Stuttgart M.Eng. Marius Ziegler Projektleiter: Prof. Dr. M. Hahn 07. November 2014 Mobile Mapping Kernelemente Messgeräte zur Positionsbestimmung
Automatisierung mit kontaktloser Energie- und Datenübertragung
 Automatisierung mit kontaktloser Energie- und Datenübertragung Möglichkeiten, Grenzen und Chancen Axel Hoppe KONTENDA GmbH Werner-Heisenberg-Str. 1 39106 Magdeburg E-Mail: [email protected] Gliederung 1.
Automatisierung mit kontaktloser Energie- und Datenübertragung Möglichkeiten, Grenzen und Chancen Axel Hoppe KONTENDA GmbH Werner-Heisenberg-Str. 1 39106 Magdeburg E-Mail: [email protected] Gliederung 1.
Integration eines pneumatischen Roboters in die Robotics API
 Integration eines pneumatischen Roboters in die Robotics API Ziel: Integration eines AirArms in die Robotics API und Umsetzung eines Demo-Anwendung Idee: Die MRK (Mensch Roboter Kooperation) bekommt zunehmend
Integration eines pneumatischen Roboters in die Robotics API Ziel: Integration eines AirArms in die Robotics API und Umsetzung eines Demo-Anwendung Idee: Die MRK (Mensch Roboter Kooperation) bekommt zunehmend
Prof. Dr.-Ing. Holger Voos M.Sc. Suparchoek Wangmanaopituk. Hochschule Ravensburg-Weingarten Labor für mobile Robotik und Mechatronik
 Agent-based Automation of a flexible Microproduction System including Teams of Mobile Robots Prof. Dr.-Ing. Holger Voos M.Sc. Suparchoek Wangmanaopituk Hochschule Labor für mobile Robotik und Mechatronik
Agent-based Automation of a flexible Microproduction System including Teams of Mobile Robots Prof. Dr.-Ing. Holger Voos M.Sc. Suparchoek Wangmanaopituk Hochschule Labor für mobile Robotik und Mechatronik
Dynamic Maps: Von Karten zu Prozessen
 Dynamic Maps: Von Karten zu Prozessen Claus Brenner Institut für Kartographie und Geoinformatik Universität Hannover Der Titel... Dynamic Maps: Von Karten zu Prozessen? Der Titel... Dynamic Maps: Von Karten
Dynamic Maps: Von Karten zu Prozessen Claus Brenner Institut für Kartographie und Geoinformatik Universität Hannover Der Titel... Dynamic Maps: Von Karten zu Prozessen? Der Titel... Dynamic Maps: Von Karten
7 WERKZEUGKORREKTUR. 7.1 Eingabe der Korrekturtabelle aus dem Part-Programm
 7 WERKZEUGKORREKTUR Die Werkzeugkorrektur erlaubt die Erstellung eines allgemeinen Part-Programms, das für verschiedene Durchmesser- bzw. Werkzeuglängen-Werte eingesetzt werden kann. Man unterscheidet
7 WERKZEUGKORREKTUR Die Werkzeugkorrektur erlaubt die Erstellung eines allgemeinen Part-Programms, das für verschiedene Durchmesser- bzw. Werkzeuglängen-Werte eingesetzt werden kann. Man unterscheidet
ES-Projektseminar (SS 2012)
") ES-Projektseminar (SS 2012) Endvortrag Team Justice League of America Dominik Matthias [Team ] Pascal Stephen Vorname Name; ES Real-Time Systems Lab Prof. Dr. rer. nat. Andy Schürr Dept. of Electrical
ES-Projektseminar (SS 2012) Endvortrag Team Justice League of America Dominik Matthias [Team ] Pascal Stephen Vorname Name; ES Real-Time Systems Lab Prof. Dr. rer. nat. Andy Schürr Dept. of Electrical
Visuelle Information zur robusten Zuordnung von Landmarken für die Navigation mobiler Roboter
 Visuelle Information zur robusten Zuordnung von Landmaren für die Navigation mobiler Roboter Forum Bildverarbeitung 2010 Thomas Emter Thomas Ulrich Loalisierung Herausforderungen Relative Sensoren (Dead
Visuelle Information zur robusten Zuordnung von Landmaren für die Navigation mobiler Roboter Forum Bildverarbeitung 2010 Thomas Emter Thomas Ulrich Loalisierung Herausforderungen Relative Sensoren (Dead
FINDEN FOLGEN FÜLLEN EINSATZ VON SENSORSYSTEMEN BEI ROBOTERGESTÜTZTEN SCHWEISSPROZESSEN
 FINDEN FOLGEN FÜLLEN EINSATZ VON SENSORSYSTEMEN BEI ROBOTERGESTÜTZTEN SCHWEISSPROZESSEN igm www.igm.at 1 EINLEITUNG INHALT > TOP 1 EINLEITUNG > TOP 2 GRÜNDE FÜR SENSOREINSATZ > TOP 3 EINTEILUNG DER SENSOREN
FINDEN FOLGEN FÜLLEN EINSATZ VON SENSORSYSTEMEN BEI ROBOTERGESTÜTZTEN SCHWEISSPROZESSEN igm www.igm.at 1 EINLEITUNG INHALT > TOP 1 EINLEITUNG > TOP 2 GRÜNDE FÜR SENSOREINSATZ > TOP 3 EINTEILUNG DER SENSOREN
Prüfung WS 2006/07. Robotik
 Prüfung WS 26/7 Robotik Anmerkungen: Aufgabenblätter auf Vollständigkeit überprüfen Nur Blätter mit Namen und Matr.Nr. werden korrigiert. Keine rote Farbe verwenden. Zu jeder Lösung Aufgabennummer angeben.
Prüfung WS 26/7 Robotik Anmerkungen: Aufgabenblätter auf Vollständigkeit überprüfen Nur Blätter mit Namen und Matr.Nr. werden korrigiert. Keine rote Farbe verwenden. Zu jeder Lösung Aufgabennummer angeben.
Sicher Rad fahren Regeln und Tipps
 Sicher Rad fahren Regeln und Tipps Bochum, September 2010 Klaus Kuliga ADFC Bochum Ideale Verhältnisse... 2 ... und tägliche Realität 3 Sicher Rad fahren Warum? Radfahrer können durch ihr Verhalten zur
Sicher Rad fahren Regeln und Tipps Bochum, September 2010 Klaus Kuliga ADFC Bochum Ideale Verhältnisse... 2 ... und tägliche Realität 3 Sicher Rad fahren Warum? Radfahrer können durch ihr Verhalten zur
Kalkulation von Kontaktlinsen ein Workbook
 Kalkulation von Kontaktlinsen ein Workbook Betreuer: Prof. Dr. Anna Nagl Dipl.-Ing. (FH) Gunther Oesker 1 Gliederung Einleitung: Weshalb ist eine eigene Kalkulation notwendig? Problemstellung Ziele dieser
Kalkulation von Kontaktlinsen ein Workbook Betreuer: Prof. Dr. Anna Nagl Dipl.-Ing. (FH) Gunther Oesker 1 Gliederung Einleitung: Weshalb ist eine eigene Kalkulation notwendig? Problemstellung Ziele dieser
Der diskrete Kalman Filter
 Der diskrete Kalman Filter Fachbereich: Informatik Betreuer: Marc Drassler Patrick Winkler 1168954 6. Dezember 2004 Technische Universität Darmstadt Simulation und Systemoptimierung Darmstadt Dribbling
Der diskrete Kalman Filter Fachbereich: Informatik Betreuer: Marc Drassler Patrick Winkler 1168954 6. Dezember 2004 Technische Universität Darmstadt Simulation und Systemoptimierung Darmstadt Dribbling
2. Teil: Programmierung der Roboter
 ,, 2. Teil: Programmierung der Lego Mindstorms Schulprojekt der Technischen Universität Dänemark Technische Universität Dänemark Institut für Mathematik Januar 2008 , Der Labyrinth- Wettbewerb Lego Mindstorms
,, 2. Teil: Programmierung der Lego Mindstorms Schulprojekt der Technischen Universität Dänemark Technische Universität Dänemark Institut für Mathematik Januar 2008 , Der Labyrinth- Wettbewerb Lego Mindstorms
Vom Körper zum Server: Mobile und drahtlose Datenerfassung und -Übertragung in Gesundheitspflege-, Notfall- und AAL-Szenarien
 Technische Universität Technische Universität Braunschweig Carl- Fried rich-ga uß- Faku Ität Institut für Betriebssysteme und Rechnerverbund Vom Körper zum Server: Mobile und drahtlose Datenerfassung und
Technische Universität Technische Universität Braunschweig Carl- Fried rich-ga uß- Faku Ität Institut für Betriebssysteme und Rechnerverbund Vom Körper zum Server: Mobile und drahtlose Datenerfassung und
4 Autonomie bei mobilen Robotern
 4 Autonomie bei mobilen Robotern Nachdem im vorhergehenden Kapitel die Begriffe autonom und Autonomie recht oft verwendet wurden, ist es an der Reihe, diese Begriffe und ihre technische Umsetzung etwas
4 Autonomie bei mobilen Robotern Nachdem im vorhergehenden Kapitel die Begriffe autonom und Autonomie recht oft verwendet wurden, ist es an der Reihe, diese Begriffe und ihre technische Umsetzung etwas
Verfahren zur Anpassung der Ortungsgenauigkeit an die Leistungsanforderung bei Eisenbahnstrecken
 HEFT 57 BRAUNSCHWEIG 1997 SCHRIFTENREIHE INSTITUT FÜR EISENBAHNWESEN UND VERKEHRSSICHERUNG TECHNISCHE UNIVERSITÄT BRAUNSCHWEIG DR.-ING. JÖRN PACHL, UNIVERSITÄTSPROFESSOR Verfahren zur Anpassung der Ortungsgenauigkeit
HEFT 57 BRAUNSCHWEIG 1997 SCHRIFTENREIHE INSTITUT FÜR EISENBAHNWESEN UND VERKEHRSSICHERUNG TECHNISCHE UNIVERSITÄT BRAUNSCHWEIG DR.-ING. JÖRN PACHL, UNIVERSITÄTSPROFESSOR Verfahren zur Anpassung der Ortungsgenauigkeit
Sicher Rad fahren Regeln und Tipps
 Sicher Rad fahren Regeln und Tipps Bernd Zanke Mitglied des Vorstandes ADFC Berlin e.v. pööös Ideale Verhältnisse... pööös 2 ... und tägliche Realität pööös 3 Sicher Rad fahren Warum? Radfahrer können
Sicher Rad fahren Regeln und Tipps Bernd Zanke Mitglied des Vorstandes ADFC Berlin e.v. pööös Ideale Verhältnisse... pööös 2 ... und tägliche Realität pööös 3 Sicher Rad fahren Warum? Radfahrer können
Strassenlärm: Korrekturen zum Strassenlärm- Berechnungsmodell
 Vollzug Umwelt MITTEILUNGEN ZUR LÄRMSCHUTZ-VERORDNUNG (LSV) NR. 6 Strassenlärm: Korrekturen zum Strassenlärm- Berechnungsmodell Bundesamt für Umwelt, Wald und Landschaft BUWAL Herausgeber Bundesamt für
Vollzug Umwelt MITTEILUNGEN ZUR LÄRMSCHUTZ-VERORDNUNG (LSV) NR. 6 Strassenlärm: Korrekturen zum Strassenlärm- Berechnungsmodell Bundesamt für Umwelt, Wald und Landschaft BUWAL Herausgeber Bundesamt für
EINFACH SICHER UND SKALIERBAR
 ssi autocruiser AUTOCRUISER EINFACH SICHER UND SKALIERBAR Der Autocruiser von SSI SCHÄFER ist ein preisgünstiges und extrem flexibles Transportsystem für kleinere bis mittlere Durchsätze. Es ist für praktisch
ssi autocruiser AUTOCRUISER EINFACH SICHER UND SKALIERBAR Der Autocruiser von SSI SCHÄFER ist ein preisgünstiges und extrem flexibles Transportsystem für kleinere bis mittlere Durchsätze. Es ist für praktisch
IDENTIFIKATION DYNAMISCHER ROBOTERPARAMETER
 IDENTIFIKATION DYNAMISCHER ROBOTERPARAMETER Arbeit für 1-2 Personen Modellierung und Ableitung der Identifikationsgleichung für serielle Robotersysteme Elimination linearer Abhängigkeiten Berechnung optimaler
IDENTIFIKATION DYNAMISCHER ROBOTERPARAMETER Arbeit für 1-2 Personen Modellierung und Ableitung der Identifikationsgleichung für serielle Robotersysteme Elimination linearer Abhängigkeiten Berechnung optimaler
Dashcam-Videos als Kontext im Mechanikunterricht
 Wuppertal Dashcam-Videos als Kontext im Mechanikunterricht Prof. Dr., Max Dittewig Institut für Didaktik der Physik Goethe-Universität Frankfurt Dashcam-Videos Gliederung: 1. Grundideen 2. Drei Beispiele
Wuppertal Dashcam-Videos als Kontext im Mechanikunterricht Prof. Dr., Max Dittewig Institut für Didaktik der Physik Goethe-Universität Frankfurt Dashcam-Videos Gliederung: 1. Grundideen 2. Drei Beispiele
Ermittlung relationsbezogener Angebotsqualitäten in multimodalen Verkehrsnetzen
 Ermittlung relationsbezogener Angebotsqualitäten in multimodalen Verkehrsnetzen Dipl.-Ing. Gerd Schleupen Universität Stuttgart Seidenstr. 36, 70174 Stuttgart [email protected] 1 Einleitung
Ermittlung relationsbezogener Angebotsqualitäten in multimodalen Verkehrsnetzen Dipl.-Ing. Gerd Schleupen Universität Stuttgart Seidenstr. 36, 70174 Stuttgart [email protected] 1 Einleitung
RatSLAM. Torben Becker. 24. Mai HAW Hamburg
 HAW Hamburg 24. Mai 2012 Gliederung 1 Motivation 2 3 Aussicht 2 / 21 Motivation Warum SLAM? Navigation Umgebungskartografie Feststellung der Position innerhalb eines Geländes ohne Funksignale Keine vorherige
HAW Hamburg 24. Mai 2012 Gliederung 1 Motivation 2 3 Aussicht 2 / 21 Motivation Warum SLAM? Navigation Umgebungskartografie Feststellung der Position innerhalb eines Geländes ohne Funksignale Keine vorherige
Projektarbeit: Ein Verfahren zur Erzeugung stabiler Differenzbilder
 Projektarbeit: Ein Verfahren zur Erzeugung stabiler Differenzbilder AG Eingebettete Systeme und Robotik (RESY),, http://resy.informatik.uni-kl.de/ 1. Einführung 2. Filterung des Kamerarauschens 3. Feature
Projektarbeit: Ein Verfahren zur Erzeugung stabiler Differenzbilder AG Eingebettete Systeme und Robotik (RESY),, http://resy.informatik.uni-kl.de/ 1. Einführung 2. Filterung des Kamerarauschens 3. Feature
Johannes Stier. ni.com
 1 Johannes Stier Technische Universität Dresden Studiendekan Mechatronik Prof. Dr.-Ing. Michael Beitelschmidt Lego Mindstorms EV3 hat Einzug in das Einführungsprojekt Mechatronik gefunden [email protected]
1 Johannes Stier Technische Universität Dresden Studiendekan Mechatronik Prof. Dr.-Ing. Michael Beitelschmidt Lego Mindstorms EV3 hat Einzug in das Einführungsprojekt Mechatronik gefunden [email protected]
Grundfahraufgaben für die Klasse CE (Anlage 7 Nr FeV)
") Prüfungsrichtlinie gemäß Annex II Anlage 6 (Stand 28.01.2009) Seite 1 von 5 Anlage 6 zur Prüfungsrichtlinie Grundfahraufgaben für die Klasse CE (Anlage 7 Nr. 2.1.4.5 FeV) 1 Allgemeine Hinweise Die Grundfahraufgaben
Prüfungsrichtlinie gemäß Annex II Anlage 6 (Stand 28.01.2009) Seite 1 von 5 Anlage 6 zur Prüfungsrichtlinie Grundfahraufgaben für die Klasse CE (Anlage 7 Nr. 2.1.4.5 FeV) 1 Allgemeine Hinweise Die Grundfahraufgaben
Prozessbegleitende Qualitätssicherung für eine automatisierte Verarbeitung von Hybridgarn-Textil-Thermoplasten (HGTT)
") Prozessbegleitende Qualitätssicherung für eine automatisierte Verarbeitung von Hybridgarn-Textil-Thermoplasten (HGTT) Einordnung in den Gesamtprozess Bauteilauslegung Zuschnittgenerierung Lagenzuschnitt
Prozessbegleitende Qualitätssicherung für eine automatisierte Verarbeitung von Hybridgarn-Textil-Thermoplasten (HGTT) Einordnung in den Gesamtprozess Bauteilauslegung Zuschnittgenerierung Lagenzuschnitt
Anhang E. Richtlinie über Flächen für die Feuerwehr - Fassung August
 Anhang E Richtlinie über Flächen für die Feuerwehr - Fassung August 2006 - Zur Ausführung des 5 der Landesbauordnung Mecklenburg-Vorpommern wird hinsichtlich der Flächen für die Feuerwehr Folgendes bestimmt:
Anhang E Richtlinie über Flächen für die Feuerwehr - Fassung August 2006 - Zur Ausführung des 5 der Landesbauordnung Mecklenburg-Vorpommern wird hinsichtlich der Flächen für die Feuerwehr Folgendes bestimmt:
Kollisionsvermeidung mittels fahrzeugautarker Ortung unter Verwendung Bild gebender Verfahren und GNSS
 Kollisionsvermeidung mittels fahrzeugautarker Ortung unter Verwendung Bild gebender Verfahren und GNSS Dipl.-Ing. Markus Pelz Ansatz für eine Kollisionsvermeidung bei Eisenbahnen > POSNAV 6. 7. November
Kollisionsvermeidung mittels fahrzeugautarker Ortung unter Verwendung Bild gebender Verfahren und GNSS Dipl.-Ing. Markus Pelz Ansatz für eine Kollisionsvermeidung bei Eisenbahnen > POSNAV 6. 7. November
Mobile Robotik KMP 1500
 Mobile Robotik KMP 1500 DE KMP 1500 Autonomie, Intelligenz, Präzision Kürzere Reaktionszeiten und höhere Flexibilität über die Vollautomatisierung hinaus: Das sind die neuen, sich immer schneller verändernden
Mobile Robotik KMP 1500 DE KMP 1500 Autonomie, Intelligenz, Präzision Kürzere Reaktionszeiten und höhere Flexibilität über die Vollautomatisierung hinaus: Das sind die neuen, sich immer schneller verändernden
CAIMAN M Weitwinkel STOP+MOTION Radardetektor
 SWARCO TRAFFIC SYSTEMS GMBH TECHNOLOGIETAG SWARCO 2015 13. März 2015 CAIMAN M Weitwinkel STOP+MOTION Radardetektor CAIMAN M Weitwinkel STOP+MOTION Radar CAIMAN M Weitwinkel STOP+MOTION Radardetektor 1
SWARCO TRAFFIC SYSTEMS GMBH TECHNOLOGIETAG SWARCO 2015 13. März 2015 CAIMAN M Weitwinkel STOP+MOTION Radardetektor CAIMAN M Weitwinkel STOP+MOTION Radar CAIMAN M Weitwinkel STOP+MOTION Radardetektor 1
Konzeption einer roboterbasierten Unterstützung für die Realisierung einer 24/7-Bibliothek an der Technischen Hochschule Wildau
 Konzeption einer roboterbasierten Unterstützung für die Realisierung einer 24/7-Bibliothek an der Technischen Hochschule Wildau 9. Bibliothekssymposium an der Technischen Hochschule Wildau 14.09.2016 Christian
Konzeption einer roboterbasierten Unterstützung für die Realisierung einer 24/7-Bibliothek an der Technischen Hochschule Wildau 9. Bibliothekssymposium an der Technischen Hochschule Wildau 14.09.2016 Christian
Richtlinien über Flächen für die Feuerwehr
 Richtlinien über Flächen für die Feuerwehr - Fassung Juli 1998 - Zur Ausführung des Art. 15 Abs. 3 Bayerische Bauordnung (BayBO) wird hinsichtlich der Flächen für die Feuerwehr folgendes bestimmt: 1 Befestigung
Richtlinien über Flächen für die Feuerwehr - Fassung Juli 1998 - Zur Ausführung des Art. 15 Abs. 3 Bayerische Bauordnung (BayBO) wird hinsichtlich der Flächen für die Feuerwehr folgendes bestimmt: 1 Befestigung
Differenzierung von Robotern in Industrie und Service - Probleme der Robotik bei mobilen Systemen -
 Differenzierung von Robotern in Industrie und Service - Probleme der Robotik bei mobilen Systemen - Christoph Schmiedecke Studiendepartment Informatik Hochschule für Angewandte Wissenschaften Hamburg 16.
Differenzierung von Robotern in Industrie und Service - Probleme der Robotik bei mobilen Systemen - Christoph Schmiedecke Studiendepartment Informatik Hochschule für Angewandte Wissenschaften Hamburg 16.
Richtlinie über Flächen für die Feuerwehr vom 25. März 2002 (ABl. S. 466, 1015) Zuletzt geändert durch Bekanntmachung vom 9. Juli 2007 (ABl. S.
 Zuletzt geändert durch Bekanntmachung vom 9. Juli 2007 (ABl. S.") Richtlinie über Flächen für die Feuerwehr vom 25. März 2002 (ABl. S. 466, 1015) Zuletzt geändert durch Bekanntmachung vom 9. Juli 2007 (ABl. S. 1631) Zur Ausführung des 5 der Brandenburgischen Bauordnung
Richtlinie über Flächen für die Feuerwehr vom 25. März 2002 (ABl. S. 466, 1015) Zuletzt geändert durch Bekanntmachung vom 9. Juli 2007 (ABl. S. 1631) Zur Ausführung des 5 der Brandenburgischen Bauordnung
Rechnerübung 4: Roboter-Regelung mit Initialisierung
 Rechnerübung 4: Roboter-Regelung mit Initialisierung Aufgabe 4.1: Auf der Vorlesungs-Webpage https://www.eal.ei.tum.de/index.php?id=psvms0 befindet sich eine Bibliothek für Antriebsstrangelemente mit einem
Rechnerübung 4: Roboter-Regelung mit Initialisierung Aufgabe 4.1: Auf der Vorlesungs-Webpage https://www.eal.ei.tum.de/index.php?id=psvms0 befindet sich eine Bibliothek für Antriebsstrangelemente mit einem
1 Einleitung LEGO MINDSTORMS als informationsverarbeitendes System Lehrbeitrag des Buchs Aufbau des Buchs...
 Inhaltsverzeichnis 1 Einleitung... 1 1.1 LEGO MINDSTORMS als informationsverarbeitendes System.... 2 1.2 Lehrbeitrag des Buchs...... 3 1.3 Aufbau des Buchs...... 4 2 Robotik... 5 2.1 Roboter.... 5 2.1.1
Inhaltsverzeichnis 1 Einleitung... 1 1.1 LEGO MINDSTORMS als informationsverarbeitendes System.... 2 1.2 Lehrbeitrag des Buchs...... 3 1.3 Aufbau des Buchs...... 4 2 Robotik... 5 2.1 Roboter.... 5 2.1.1
10.1 Geometrische Wegplanung im Konfigurationsraum
 10 Pfadplanung 10.1 Geometrische Wegplanung im Konfigurationsraum Vorausetzungen Roboter bewegt sich in der Ebene, ohne sich zu drehen Hindernisse sind konvexe Polygone Beispiel Grundgedanke Problem wird
10 Pfadplanung 10.1 Geometrische Wegplanung im Konfigurationsraum Vorausetzungen Roboter bewegt sich in der Ebene, ohne sich zu drehen Hindernisse sind konvexe Polygone Beispiel Grundgedanke Problem wird
5. Erschütterungen. 1. Ausbreitung von Erschütterungen. 2. Beurteilung von Erschütterungen. 3. Reduktion von Erschütterungen
 1. Ausbreitung von Erschütterungen 2. Beurteilung von Erschütterungen 3. Reduktion von Erschütterungen Grundsätzliche Überlegungen Grundsätzliche Überlegungen Grundsätzliche Überlegungen Sender Weg Empfänger
1. Ausbreitung von Erschütterungen 2. Beurteilung von Erschütterungen 3. Reduktion von Erschütterungen Grundsätzliche Überlegungen Grundsätzliche Überlegungen Grundsätzliche Überlegungen Sender Weg Empfänger
Navigation: Einführung
 Navigation: Einführung Definition (Levitt & Lawton 1990) Navigation als Prozess zur Beantwortung der Fragen (a) Wo bin ich? (b) Wo befinden sich andere Orte im Bezug zu mir? (c) Wie gelange ich von meinem
Navigation: Einführung Definition (Levitt & Lawton 1990) Navigation als Prozess zur Beantwortung der Fragen (a) Wo bin ich? (b) Wo befinden sich andere Orte im Bezug zu mir? (c) Wie gelange ich von meinem
Linearaktuatoren. Typen Anwendungsgebiete. Berechnungen Probleme 1-16
 Typen Anwendungsgebiete Berechnungen Probleme 1-16 Standard-Hybrid-Linearaktuatoren Linearaktuatoren - Typen Baugröße/ NEMA Max. Geschwindigkeit* Technische Daten Max. Schubkraft* Bezeichnung Gewindesteigung
Typen Anwendungsgebiete Berechnungen Probleme 1-16 Standard-Hybrid-Linearaktuatoren Linearaktuatoren - Typen Baugröße/ NEMA Max. Geschwindigkeit* Technische Daten Max. Schubkraft* Bezeichnung Gewindesteigung
Kinematische Bestandsdatenerfassung mit Laserscannern
 Kinematische Bestandsdatenerfassung mit Laserscannern 3D MAPPING Das Mobile Straßen Erfassungs- System (MoSES) Aufnahme des Straßen- oder Schienenkorridors mit ca. 40 m Breite Erfassung des Raumes mit
Kinematische Bestandsdatenerfassung mit Laserscannern 3D MAPPING Das Mobile Straßen Erfassungs- System (MoSES) Aufnahme des Straßen- oder Schienenkorridors mit ca. 40 m Breite Erfassung des Raumes mit
CalcVectorPC v Veröffentlicht 2016 Copyright S-cubic GmbH. Krebsbachstr. 12 D Bergisch Gladbach
 CalcVectorPC v1.0.0 CalcVectorPC v1.0.0 Veröffentlicht 2016 Copyright 2016 S-cubic GmbH Krebsbachstr. 12 D-51429 Bergisch Gladbach Tel +49 (0) 2204 9160 30 Fax +49 (0) 2204 9199 416 email: [email protected]
CalcVectorPC v1.0.0 CalcVectorPC v1.0.0 Veröffentlicht 2016 Copyright 2016 S-cubic GmbH Krebsbachstr. 12 D-51429 Bergisch Gladbach Tel +49 (0) 2204 9160 30 Fax +49 (0) 2204 9199 416 email: [email protected]
Stabilitätsprüfung projizierter Referenzpunkte für die Erfassung großvolumiger Messobjekte
 Stabilitätsprüfung projizierter Referenzpunkte für die Erfassung großvolumiger Messobjekte Murat ÜRÜN, Manfred WIGGENHAGEN, Hubertus NITSCHKE, Christian HEIPKE VWN Hannover, IPI Universität Hannover IPI
Stabilitätsprüfung projizierter Referenzpunkte für die Erfassung großvolumiger Messobjekte Murat ÜRÜN, Manfred WIGGENHAGEN, Hubertus NITSCHKE, Christian HEIPKE VWN Hannover, IPI Universität Hannover IPI
[ tutorial - block animation ]
![[ tutorial - block animation ]](/thumbs/56/38357820.jpg "[ tutorial - block animation ]") Grundlagen zum Thema Keyframing auf: http://de.wikipedia.org/wiki/keyframe Keyframeanimation oder Schlüsselbildanimation kommt aus der Zeichentrickbranche Schlüsselbilder werden gezeichnet und geben die
Grundlagen zum Thema Keyframing auf: http://de.wikipedia.org/wiki/keyframe Keyframeanimation oder Schlüsselbildanimation kommt aus der Zeichentrickbranche Schlüsselbilder werden gezeichnet und geben die
Tag X [mm] Y [mm] Z [mm] Rx [ ] Ry [ ] Rz [ ] T T T T
![Tag X [mm] Y [mm] Z [mm] Rx [ ] Ry [ ] Rz [ ] T T T T](/thumbs/53/33060008.jpg "Tag X [mm] Y [mm] Z [mm] Rx [ ] Ry [ ] Rz [ ] T T T T") EASY-ROB Bedienungshinweis Bahnbewegung und Interpolation Zeitverhalten bei verschiedenen Interpolationsarten Die Bahnplanung hat die Aufgabe den Weg im kartesischen Raum vom Startpunkt A zum Zielpunkt
EASY-ROB Bedienungshinweis Bahnbewegung und Interpolation Zeitverhalten bei verschiedenen Interpolationsarten Die Bahnplanung hat die Aufgabe den Weg im kartesischen Raum vom Startpunkt A zum Zielpunkt
MSR OFFICE: VERWALTUNG VON SICHERHEITSKREISEN
 MSR OFFICE: VERWALTUNG VON SICHERHEITSKREISEN ÜBERBLICK Ab MSR Office 4.0 werden die Sicherheitskreise (SIF-Kreise) in einer nach VDI 2180 / IEC 61508 vergebenen Form verwaltet. Ein Sicherheitskreis besteht
MSR OFFICE: VERWALTUNG VON SICHERHEITSKREISEN ÜBERBLICK Ab MSR Office 4.0 werden die Sicherheitskreise (SIF-Kreise) in einer nach VDI 2180 / IEC 61508 vergebenen Form verwaltet. Ein Sicherheitskreis besteht
"Parkharfe" für Faller Car System
 "Parkharfe" für Faller Car System Inhaltsverzeichnis 1 Einleitung... 2 2 Bau... 2 2.1 Vorbereitung... 2 2.2 Grundplatte... 2 2.3 elektrische Bauteile... 3 2.4 Verlegung des Fahrdrahts... 3 2.5 Oberflächenbearbeitung...
"Parkharfe" für Faller Car System Inhaltsverzeichnis 1 Einleitung... 2 2 Bau... 2 2.1 Vorbereitung... 2 2.2 Grundplatte... 2 2.3 elektrische Bauteile... 3 2.4 Verlegung des Fahrdrahts... 3 2.5 Oberflächenbearbeitung...
Fragen? Wie komme ich effizient zu einem Programm? Wie beschreibe/dokumentiere ich meine Idee?
 Fragen? Wie komme ich effizient zu einem Programm? Wie beschreibe/dokumentiere ich meine Idee? Schritte beim Programmieren Idee, was der Roboter tun soll? EVA-Prinzip E: Eingabe Welche Daten werden über
Fragen? Wie komme ich effizient zu einem Programm? Wie beschreibe/dokumentiere ich meine Idee? Schritte beim Programmieren Idee, was der Roboter tun soll? EVA-Prinzip E: Eingabe Welche Daten werden über
Simulationsgestützte tzte Auslegung von Lineardirektantrieben mit MAXWELL, SIMPLORER und ANSYS. Matthias Ulmer, Universität Stuttgart
 Simulationsgestützte tzte Auslegung von Lineardirektantrieben mit MAXWELL, SIMPLORER und ANSYS Matthias Ulmer, Universität Stuttgart Gliederung 1. Motivation und Zielsetzung 2. Elektrodynamische Lineardirektantriebe
Simulationsgestützte tzte Auslegung von Lineardirektantrieben mit MAXWELL, SIMPLORER und ANSYS Matthias Ulmer, Universität Stuttgart Gliederung 1. Motivation und Zielsetzung 2. Elektrodynamische Lineardirektantriebe
POSITRON ein sicheres Ortungssystem
 POSITRON ein sicheres Ortungssystem Dipl.-Ing. Katrin Gerlach, DLR POSITRON- ein sicheres Ortungssystem > 24. Oktober 2008 > Folie 1 Gliederung Ortung im Schienenverkehr Motivation für fahrzeugseitige
POSITRON ein sicheres Ortungssystem Dipl.-Ing. Katrin Gerlach, DLR POSITRON- ein sicheres Ortungssystem > 24. Oktober 2008 > Folie 1 Gliederung Ortung im Schienenverkehr Motivation für fahrzeugseitige
Statistiken. Features
 Bild 5.6_1 Statistiken 2001 waren 17 % der Unfälle in Deutschland Auffahrunfälle mit dem vorausfahrenden Fahrzeug (Quelle: Statistisches Bundesamt) Eine Studie stellte eine um 40 % gesteigerte Reaktionsfähigkeit
Bild 5.6_1 Statistiken 2001 waren 17 % der Unfälle in Deutschland Auffahrunfälle mit dem vorausfahrenden Fahrzeug (Quelle: Statistisches Bundesamt) Eine Studie stellte eine um 40 % gesteigerte Reaktionsfähigkeit
Navigation anhand natürlicher Landmarken mit Hilfe der Scale Invariant Feature Transform. Thorsten Jost INF-M2 AW1 Sommersemester
 Navigation anhand natürlicher Landmarken mit Hilfe der Scale Invariant Feature Transform Thorsten Jost INF-M2 AW1 Sommersemester 2008 Agenda Motivation Feature Detection Beispiele Posenbestimmung in Räumen
Navigation anhand natürlicher Landmarken mit Hilfe der Scale Invariant Feature Transform Thorsten Jost INF-M2 AW1 Sommersemester 2008 Agenda Motivation Feature Detection Beispiele Posenbestimmung in Räumen
Biomechanische Wirbelsäulenforschung
 Automatische Datenauswertung Johann Jakob Preuß Michael Steffes Westfälische Wilhelms-Universität Münster Abschlusspräsentation, 08.07.2008 Gliederung 1 Aktueller Forschungsstand Benötigte Daten Gliederung
Automatische Datenauswertung Johann Jakob Preuß Michael Steffes Westfälische Wilhelms-Universität Münster Abschlusspräsentation, 08.07.2008 Gliederung 1 Aktueller Forschungsstand Benötigte Daten Gliederung
Einführung in die Robotik. Jianwei Zhang
 - Jianwei Zhang [email protected] Fakultät für Mathematik, Informatik und Naturwissenschaften Technische Aspekte Multimodaler Systeme 28. Juni 2011 J. Zhang 324 Programmierung auf Aufgabenebene
- Jianwei Zhang [email protected] Fakultät für Mathematik, Informatik und Naturwissenschaften Technische Aspekte Multimodaler Systeme 28. Juni 2011 J. Zhang 324 Programmierung auf Aufgabenebene
Erreichen eines Ziels (ohne Kamera) Teil II: Realisation
 Teil II: Realisation") Erreichen eines Ziels (ohne Kamera) Teil II: Realisation Vortrag im PSBVLego 2003, PDF-Version Christoph Sommer 2003-01-20 1 Aufgabenstellung Anfahren einer Lampe hinter einem kleinen
Erreichen eines Ziels (ohne Kamera) Teil II: Realisation Vortrag im PSBVLego 2003, PDF-Version Christoph Sommer 2003-01-20 1 Aufgabenstellung Anfahren einer Lampe hinter einem kleinen
Muster-Richtlinien über Flächen für die Feuerwehr (Fassung Juli ) *)
 *)") Muster-Richtlinien über Flächen für die Feuerwehr (Fassung Juli 1998 1 ) *) Zur Ausführung des 5 MBO wird hinsichtlich der Flächen für die Feuerwehr Folgendes bestimmt: 1 Befestigung und Tragfähigkeit
Muster-Richtlinien über Flächen für die Feuerwehr (Fassung Juli 1998 1 ) *) Zur Ausführung des 5 MBO wird hinsichtlich der Flächen für die Feuerwehr Folgendes bestimmt: 1 Befestigung und Tragfähigkeit
Moderne Hacktechnik zur mechanischen Beikrautregulierung - Teil 1 - Verschieberahmen
 Moderne Hacktechnik zur mechanischen Beikrautregulierung - Teil 1 - Verschieberahmen Am 30.6.2016 fand auf den Flächen der Fam. Jugovits, Schachendorf die BIO-AUSTRIA- Maschinenvorführung zum Thema Hacktechnik
Moderne Hacktechnik zur mechanischen Beikrautregulierung - Teil 1 - Verschieberahmen Am 30.6.2016 fand auf den Flächen der Fam. Jugovits, Schachendorf die BIO-AUSTRIA- Maschinenvorführung zum Thema Hacktechnik
Messungen mit dem Lichtsensor
 Messungen mit dem Lichtsensor Für die Programmierung eines Roboters, der einer Linie folgt, brauchen wir für die drei Farben die Helligkeitswerte, die dein Lichtsensor jeweils ausgibt. Arbeite dazu folgende
Messungen mit dem Lichtsensor Für die Programmierung eines Roboters, der einer Linie folgt, brauchen wir für die drei Farben die Helligkeitswerte, die dein Lichtsensor jeweils ausgibt. Arbeite dazu folgende
Muster-Richtlinien über Flächen für die Feuerwehr. Fassung Februar 2007
 Muster-Richtlinien über Flächen für die Feuerwehr Fassung Februar 2007 (zuletzt geändert durch Beschluss der Fachkommission Bauaufsicht vom Oktober 2009) Zur Ausführung des 5 MBO wird hinsichtlich der
Muster-Richtlinien über Flächen für die Feuerwehr Fassung Februar 2007 (zuletzt geändert durch Beschluss der Fachkommission Bauaufsicht vom Oktober 2009) Zur Ausführung des 5 MBO wird hinsichtlich der
INTUITIVE PROGRAMMIERUNG. Einsatz von industriellen Robotersystemen im Mittelstand
 INTUITIVE PROGRAMMIERUNG Einsatz von industriellen Robotersystemen im Mittelstand Herausforderung: Industrieroboter im Mittelstand Industrieroboter werden derzeit aufgrund ihrer Komplexität und des damit
INTUITIVE PROGRAMMIERUNG Einsatz von industriellen Robotersystemen im Mittelstand Herausforderung: Industrieroboter im Mittelstand Industrieroboter werden derzeit aufgrund ihrer Komplexität und des damit
Zahnformen in mechanischen Kleinuhren
 Fakultät Maschinenwesen, Institut für Maschinenelemente und Maschinenkonstruktion, Lehrstuhl Maschinenelemente Berechnung, Optimierung und Messung geometrischer und kinematischer Eigenschaften Feinwerktechnische
Fakultät Maschinenwesen, Institut für Maschinenelemente und Maschinenkonstruktion, Lehrstuhl Maschinenelemente Berechnung, Optimierung und Messung geometrischer und kinematischer Eigenschaften Feinwerktechnische
Univ.-Prof. DDr. Franz Adunka, A
 Univ.-Prof. DDr. Franz Adunka, A Warum die Diskussion über den JMF? EN 1434 legt für die zulässigen Messabweichungen fest: Seite 2 Grundsätzliche Überlegungen Messfehler / Messabweichung ist wichtig für
Univ.-Prof. DDr. Franz Adunka, A Warum die Diskussion über den JMF? EN 1434 legt für die zulässigen Messabweichungen fest: Seite 2 Grundsätzliche Überlegungen Messfehler / Messabweichung ist wichtig für
Lokalisierung von inneren und äußeren Grenzen in Sensornetzwerken
 Lokalisierung von inneren und äußeren Grenzen in Sensornetzwerken Seminararbeit: Algorithmen für Sensornetzwerke Thomas Gramer 1 Thomas Gramer: KIT Universität des Landes Baden-Württemberg und nationales
Lokalisierung von inneren und äußeren Grenzen in Sensornetzwerken Seminararbeit: Algorithmen für Sensornetzwerke Thomas Gramer 1 Thomas Gramer: KIT Universität des Landes Baden-Württemberg und nationales