Geschichte. Zum ersten Einsatz eines Industrieroboter (Unimate) kam es dann im Jahr 1961 bei General Motors in einer Produktionslinie.
|
|
|
- Sofie Bauer
- vor 6 Jahren
- Abrufe
Transkript

1 Industrieroboter

2 Geschichte Die ersten Industrieroboter waren in der Reaktortechnik zu suchen, wobei diese noch handgesteuert waren. Für den ersten wirklichen programmierbaren Industrieroboter der Welt wurde offiziell im Jahr 1954 in den USA ein Patent angemeldet. Zum ersten Einsatz eines Industrieroboter (Unimate) kam es dann im Jahr 1961 bei General Motors in einer Produktionslinie.

3 Geschichte Hydraulische Industrieroboter wurden in Japan ab 1967 und in Deutschland bei Mercedes-Benz in der Automobilproduktion ab 1970 eingesetzt. Im Jahr 1973 baute der deutsche Robotikpionier KUKA den weltweit ersten Industrieroboter mit sechs elektromechanisch angetriebenen Achsen, bekannt als Famulus.
4




5 Bauformen von Industrierobotern t Portalroboter Vertikal-Knickarmroboter Horizontaler Knickarmroboter Deltaroboter
6 Portalroboter Vorteile: Verfahren in kartesischen Raumkoordinaten ohne Koordinatentransformation möglich(einfache Steuerung) Keine großen Anforderungen an das räumliche Vorstellungsvermögen des Programmierers Steife Struktur,daher sehr große Arbeitsräume möglich Nachteile: Großer Kollisionsraum Große Stellfläche Niedrige Arbeitsgeschwindigkeit Arbeitsraum innerhalb der Roboterabmessungen

7 Portalroboter Anwendungsgebiete: Palettieren,Kommissionieren Fertigteilfertigung für die Bauindustrie
8 Horizontaler Knickarmroboter Vorteile: Hohe Steifigkeit in vertikaler Richtung Eigengewicht des Roboters wirkt nicht auf die Antriebe Hohe Geschwindigkeit und Beweglichkeit auch bei großen Reichweiten Nachteile: Form des Arbeitsraums beschrankt die Anwendungsgebiete

9 Horizontaler Knickarmroboter Anwendungsgebiete: Montage,Fügen,Bestücken von Leiterplatten und Magazinen,Löten
10 Vertikal-Knickarmroboter Vorteile: Geringes Störvolumen Umgreifen von Hindernissen möglich Von allen Roboterbauarten am universellsten einsetzbar Nachteile: Belastung der Antriebe durch das Eigengewicht erfordert meist einen Gewichtsausgleich

11 Vertikal-Knickarmroboter Anwendungsgebiete: Beschichten und Lackieren,Punkt-und Bahnschweißen, Werkstückhandhabung,Palettieren,Entgraten,Kleberauftrag
12 Delta Roboter Vorteile: Höhere Genauigkeit und Steifigkeit Besseres Last-Massen-Verhältnis, da die Antriebe direkt auf die Last wirken und nicht noch zusätzlich nachfolgende Armglieder tragen müsse. Nachteile: Eingeschränkter Arbeitsraum,da sich die Bewegungen der Antriebseinheiten nicht addieren.

13 Deltaroboter Anwendungsgebiete: Pick and Place
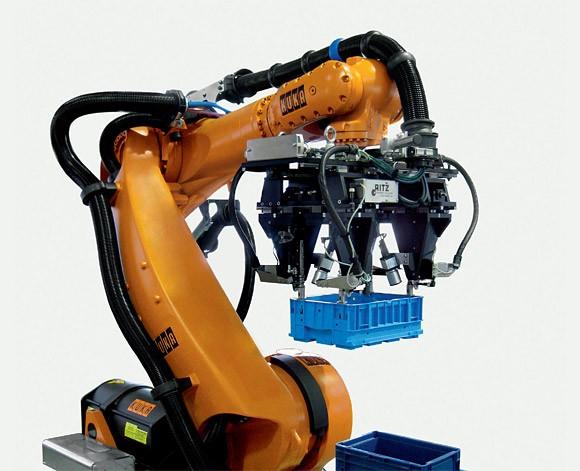
14 Knickarmroboter System Roboterarm Steuerung Handbediengerät


15 Roboterarm Fanuc M-2000iA/2300 Maximale Tragkraft 2300 kg Reichweite 3734mm Stäubli TX200 Maximale Tragkraft 150 kg Reichweite 2194mm
16 Achsen eines Knickarmroboters Die Achsen 1,2 und 3 sind die Hauptachsen des Roboters. Mit Hilfe der Hauptachsen werden die Achsen 4,5 und 6,die als Kopfoder Handachsen bezeichnet werden,im Arbeitsraum positioniert. Durch die zusätzlichen Bewegungsmöglichkeiten der Handachsen kann der Greifer oder das Werkzeug im Raum so orientiert werden, wie es für die Bearbeitungsoder Handhabungsaufgabe erforderlich ist
17 Arbeitsraum Knickarmroboter Seitenansicht (Stäubli TX90) Draufsicht

18 Technische Merkmale TX90

19 Robotersteuerung
20 Aufgaben einer Robotersteuerung Steuerung der Verfahrbewegungen des Roboters Kommunikation mit dem Benutzer und mit externen Fertigungsrechnern Fehlererkennung und diagnose am Roboter Aufnahme und Auswertung von Sensorsignalen
21 Kommunikationsmöglichkeiten der Robotersteuerung Ein- und Ausgänge an der Steuerung Serielle Schnittstelle RS232/422, Ethernet, ModBus, DeviceNet, Profibus, CANopen, ModBus, ProfiNet

22 Handbediengerät
23 Handbediengerät Starten und Stoppen des Anwenderprogramms Programmieren oder ändern eines Anwenderprogramms Händisches verfahren jeder einzelnen Roboterachse, sowie einzelner Bewegungssteuerungen aus dem Anwenderprogramm Steuern und auslesen der Ein- und Ausgängen
24 Programmierverfahren Onlineprogrammierung Teach-In -Verfahren: Unter dem Verfahren versteht man alle Verfahren, bei denen einem Roboter sein späteres Verhalten angelernt wird, bis dass das gewünschte Ergebnis erzielt ist. Play-Back -Verfahren: Beim diesem Verfahren wird der Roboter programmiert, indem er entweder direkt, oder indirekt bewegt wird. Parametereingabe per Handbediengerät
25 Programmierverfahren Offline-Programmierung Zur Programmierung des Roboters wird dieser nicht benötigt. Textuelle Programmierung Die Aufgaben werden auf der Basis einer problemorientierten Sprache beschrieben. Das Verfahren ist vergleichbar mit dem Programmieren in einer höheren Programmiersprache. CAD gestütztes Verfahren Bei der CAD gestützten Programmierung wird der Roboter an einem PC-Arbeitsplatz auf Basis von Konstruktionszeichnungen und Simulationen programmiert.
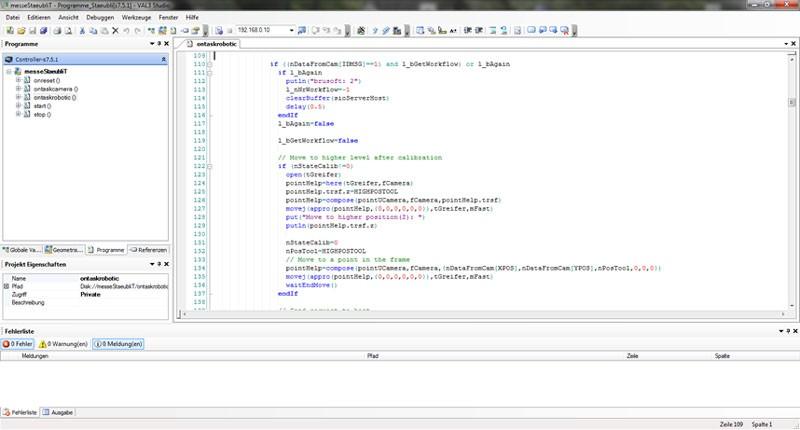
26 Textuelle Programmierung

27 CAD gestütztes Verfahren

28 Koordinatensystem Robroot: Roboter Grundkoordinatensystem World: Welt-Koordinatensystem Base: Werkstück Koordinatensystem Tool: Werkzeug-Koordinatensystem

29 Weltkoordinatensystem Raum.- bzw. Weltkoordinaten Roboter Weltkoordinaten Welt-Koordinatensystem ist ein kartesisches Koordinatensystem zur Beschreibung der Arbeitspunkte im Arbeitsraum. Die Koordinatensysteme ROBOOT und BASE bauen auf das WELTKoordinatensystem auf.

30 Weltkoordinatensystem Vorteil: Lage der Punkte lassen sich leicht und überschaubar beschreiben. Nachteil: Es kann zu einer Mehrdeutigkeit bei den Gelenkstellungen von Gelenkarmrobotern kommen.
 Das Werkzeugkoordinatensystem wird durch die sogenannte Werkzeugvermessung einem bestimmten Werkzeug")
31 Werkzeugkoordinaten Werkzeugkoordinaten umfassen Daten des Werkzeuges wie: wo befindet sich der TCP (tool center point) wie ist die Geometrie des Werkzeuges (Orientierung des Werkstückes) Das Werkzeugkoordinatensystem wird durch die sogenannte Werkzeugvermessung einem bestimmten Werkzeug zugeordnet.
 die Geschwindigkeit am TCP auch bei komplizierten Bahnen konstant zu halten das Werkzeug in Stoßrichtung zu")
32 Werkzeugkoordinaten Mittels Werkzeugkoordinatensystem werden folgende Anforderungen einfacher zu programmieren: das Drehen des Werkzeuges um den TCP (tool center point) die Geschwindigkeit am TCP auch bei komplizierten Bahnen konstant zu halten das Werkzeug in Stoßrichtung zu fahren

33 Werkstück Koordinatensystem Das Werkstück-Koordinatensystem ist ein rechtwinkliges, kartesisches Koordinatensystem, dessen Ursprung in oder an einem Werkstück bzw. Vorrichtung liegt. Vorteile: Für den Programmierer ist es einfach, die verschiedenen Verarbeitungspositionen am Werkstück exakt anzufahren und die Bewegung zu programmieren Wenn mehrere Werkstücke auf der Palette liegen, genügt es, die Werkstückgeometrie einmal zu wissen. Es muss lediglich der Nullpunkt eines neuen Werkstückes einmal angefahren werden.
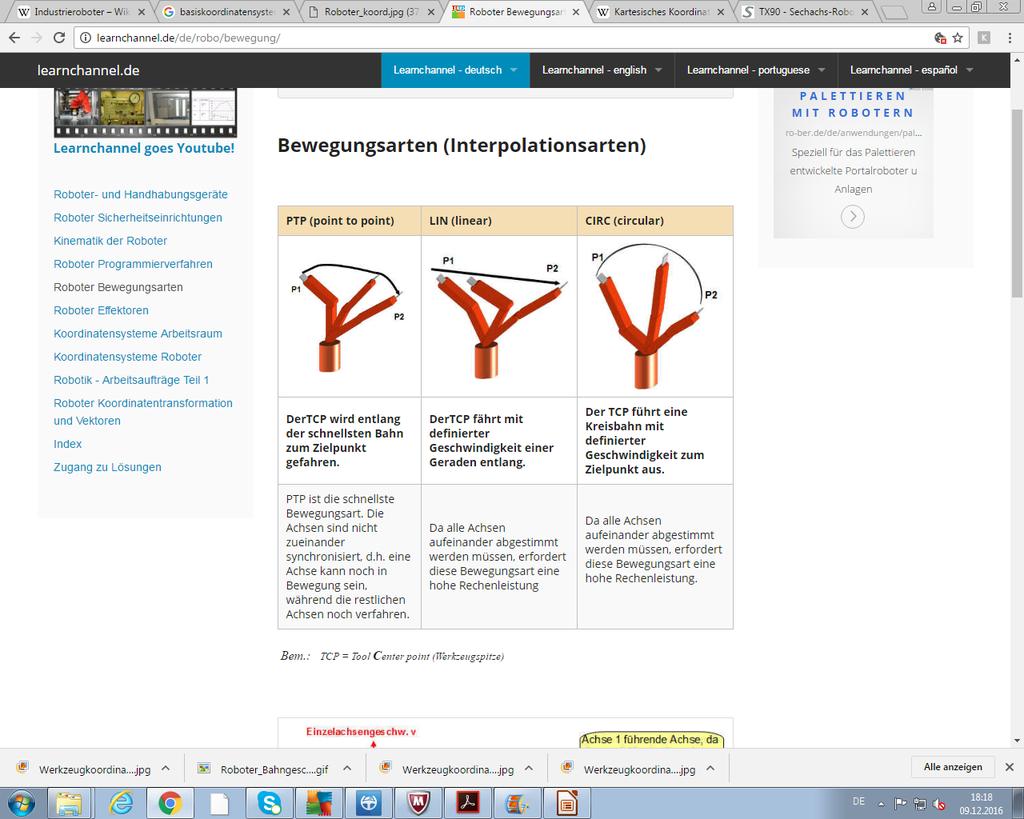
34 Bewegungsarten
35 Überschleifen Wenn man verschiedene Punkte nacheinander anfahren muss und es die Toleranz erlaubt, dann ist das sogenannte "Überschleifen" möglich. Beim Überschleifen werden Positionen nicht genau angefahren. Vorteile sind folgende: Motor wird nicht in diesem Maße abgebremst, was ein geringeren Verbrauch bedeutet. Zykluszeit wird besser

36 Roboter Effektor(Aktor) Roboterflansch
37 Arten von Effektoren Verschiedenste Greifer (je nach Anwendung) Saugheber Frässpindeln Lackierpistolen Schweißzangen Schweißbrenner Laserschneidkopf

38 Schnellwechselsystem Fluidmodul E-modul Steuerungsmodul Vierregelungsmodl Schweißstrommodul Pneumatisches Werkzeugwechselsystem
39 Sicherheit Die Gefahren, die vom Roboter ausgehen, bestehen in den für den Menschen oft völlig unvorhersehbaren, komplexen Bewegungsmustern und starken Beschleunigungen, bei gleichzeitig enormen Kräften. Als erste Schutzmaßnahme steht daher meistens das Trennen des Bewegungsraums von Mensch und Industrieroboter durch Schutzgitter mit gesicherten Schutztüren oder Lichtschranken. Neuere Entwicklungen gehen in die Richtung, dass der Roboter mittels Sensorik eine Annäherung eines Fremdobjekts oder eines Menschen rechtzeitig erkennt und seine Bewegung verlangsamt, stoppt, oder sogar selbsttätig zurückweicht.

40 Roboterzelle Trennender und nicht Trennender Schutzeinrichtung

41 Nicht Trennende Schutzeinrichtung
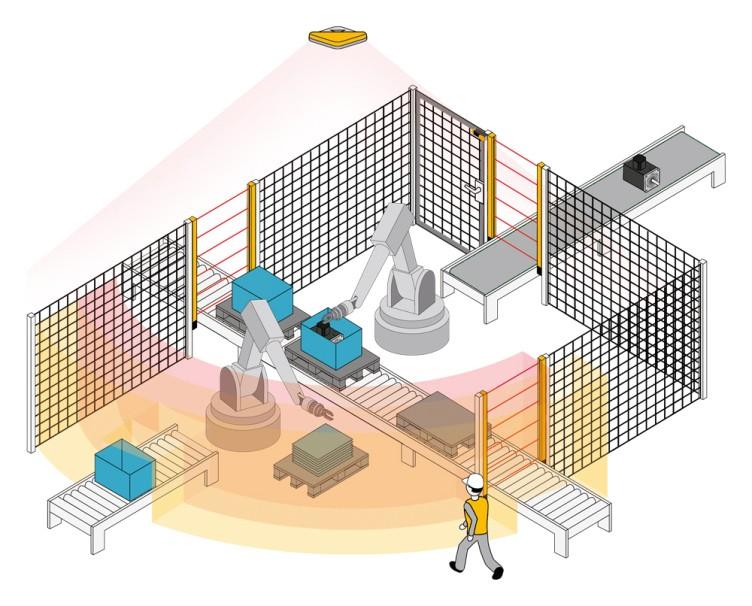
42 Sichere Kamerasysteme
1 EINFÜHRUNG Interdisziplinäre Wissenschaft Definition des Roboters... 16
 Inhaltsverzeichnis 1 EINFÜHRUNG... 15 1.1 Interdisziplinäre Wissenschaft... 15 1.2 Definition des Roboters... 16 2 GESCHICHTE DER ROBOTER... 18 2.1 Erste Ansätze... 18 2.2 Jahrhunderte danach... 19 2.3
Inhaltsverzeichnis 1 EINFÜHRUNG... 15 1.1 Interdisziplinäre Wissenschaft... 15 1.2 Definition des Roboters... 16 2 GESCHICHTE DER ROBOTER... 18 2.1 Erste Ansätze... 18 2.2 Jahrhunderte danach... 19 2.3
Roboter- und Automatisierungstechnik Teil 6: Robotik
 Roboter- und Automatisierungstechnik Teil 6: Robotik Hochschule Bremerhaven SS 2006/2007 Prof. Dr. Oliver Zielinski 6.1 Robotik: Einführung Robotertechnik Basiert auf dem Werk des tschechischen Schriftstellers
Roboter- und Automatisierungstechnik Teil 6: Robotik Hochschule Bremerhaven SS 2006/2007 Prof. Dr. Oliver Zielinski 6.1 Robotik: Einführung Robotertechnik Basiert auf dem Werk des tschechischen Schriftstellers
EUROPA R-SERIE. bis 80 kg Nutzlast
 EUROPA R-SERIE bis 80 kg Nutzlast »Simple and friendly«in DIE ZUKUNFT Kawasaki Robotics erfindet sich neu. Die R-SERIE erfüllt als innovative Robotergeneration die steigenden Ansprüche ihrer Kunden.»40
EUROPA R-SERIE bis 80 kg Nutzlast »Simple and friendly«in DIE ZUKUNFT Kawasaki Robotics erfindet sich neu. Die R-SERIE erfüllt als innovative Robotergeneration die steigenden Ansprüche ihrer Kunden.»40
Die hochdynamischen Linearmotorachsen HL
 Die hochdynamischen Linearmotorachsen HL Die Linearmotorachsen HL bieten kompromisslose, modernste Antriebstechnik hoch integriert und einbaufertig. Kompakte und präzise Kugelumlaufführungen und ein absolutes
Die hochdynamischen Linearmotorachsen HL Die Linearmotorachsen HL bieten kompromisslose, modernste Antriebstechnik hoch integriert und einbaufertig. Kompakte und präzise Kugelumlaufführungen und ein absolutes
Prüfung WS 2006/07. Robotik
 Prüfung WS 26/7 Robotik Anmerkungen: Aufgabenblätter auf Vollständigkeit überprüfen Nur Blätter mit Namen und Matr.Nr. werden korrigiert. Keine rote Farbe verwenden. Zu jeder Lösung Aufgabennummer angeben.
Prüfung WS 26/7 Robotik Anmerkungen: Aufgabenblätter auf Vollständigkeit überprüfen Nur Blätter mit Namen und Matr.Nr. werden korrigiert. Keine rote Farbe verwenden. Zu jeder Lösung Aufgabennummer angeben.
Nullpunkte und Nullpunktverschiebungen
 Begriffsdefinitionen Maschinen-Nullpunkt M Der Maschinen-Nullpunkt ist der Nullpunkt des Maschinen-Koordinatensystems. Er wird vom Maschinenhersteller festgelegt und ist Ausgangspunkt für alle weiteren
Begriffsdefinitionen Maschinen-Nullpunkt M Der Maschinen-Nullpunkt ist der Nullpunkt des Maschinen-Koordinatensystems. Er wird vom Maschinenhersteller festgelegt und ist Ausgangspunkt für alle weiteren
Entwicklungstendenzen in der Industrierobotik. Prof. Dr.-Ing. Heinz Wörn
 VDI/VDE-GMA Fachausschuss Steuerung und Regelung von Robotern Ladenburg, 25 Januar, 2006 Entwicklungstendenzen in der Industrierobotik Institut für Prozessrechentechnik, Automation und Robotik (IPR) -1-
VDI/VDE-GMA Fachausschuss Steuerung und Regelung von Robotern Ladenburg, 25 Januar, 2006 Entwicklungstendenzen in der Industrierobotik Institut für Prozessrechentechnik, Automation und Robotik (IPR) -1-
Höhere Maschinenleistung- Linearmotoren ergänzen Pneumatik Linearmotorelement LME
 Höhere Maschinenleistung- Linearmotoren ergänzen Pneumatik Linearmotorelement LME Die von Held AG weiterentwickelten bewährten Linearelemente, NEU mit integrierten elektromagnetischen Linearmotoren eignen
Höhere Maschinenleistung- Linearmotoren ergänzen Pneumatik Linearmotorelement LME Die von Held AG weiterentwickelten bewährten Linearelemente, NEU mit integrierten elektromagnetischen Linearmotoren eignen
AW 1 - Vortrag. Simulationsmodell für visuell geführte Roboter. von Bernd Pohlmann. Betreuender: Prof. Dr. Andreas Meisel
 AW 1 - Vortrag Simulationsmodell für visuell geführte Roboter von Betreuender: Prof. Dr. Andreas Meisel Inhalt 1. Motivation 2. Ziel 3. Einführung Robotik 4. Kinematik 5. Denavit-Hartenberg 6. Kameramodell
AW 1 - Vortrag Simulationsmodell für visuell geführte Roboter von Betreuender: Prof. Dr. Andreas Meisel Inhalt 1. Motivation 2. Ziel 3. Einführung Robotik 4. Kinematik 5. Denavit-Hartenberg 6. Kameramodell
Mechanik und Motoren
 Mechanik und Motoren Mechanik und Antrieb (Aktuatoren) Welche Art von Mechanik und Aktuatoren verwendet werden, wird durch die gewünscht Funktion des Roboters bestimmt Früher versuchte man Roboter zu bauen,
Mechanik und Motoren Mechanik und Antrieb (Aktuatoren) Welche Art von Mechanik und Aktuatoren verwendet werden, wird durch die gewünscht Funktion des Roboters bestimmt Früher versuchte man Roboter zu bauen,
Inbetriebnahme des EYECOM EasyVision an einem MOTOMAN Roboter
 Inbetriebnahme des EYECOM EasyVision an einem MOTOMAN Roboter Zur Inbetriebnahme des Kamerasystems EYECOM EasyVision sind folgende Schritte notwendig: 1. Montage der Kamera an den Roboter ( Kamera in Waage
Inbetriebnahme des EYECOM EasyVision an einem MOTOMAN Roboter Zur Inbetriebnahme des Kamerasystems EYECOM EasyVision sind folgende Schritte notwendig: 1. Montage der Kamera an den Roboter ( Kamera in Waage
White Paper Kartesische Handling Systeme ein technischer Vergleich mit klassischen Robotern
 White Paper Kartesische Handling Systeme ein technischer Vergleich mit klassischen Robotern Warum lohnt es sich, kartesische Handling Systeme einzusetzen? Der Trend bei klassischen Montage- und Handhabungs-Lösungen
White Paper Kartesische Handling Systeme ein technischer Vergleich mit klassischen Robotern Warum lohnt es sich, kartesische Handling Systeme einzusetzen? Der Trend bei klassischen Montage- und Handhabungs-Lösungen
der klügere Roboter gibt nach BioRob Leichtbauroboter Für die sichere Mensch-Roboter-Kooperation
 der klügere Roboter gibt nach BioRob Leichtbauroboter Für die sichere Mensch-Roboter-Kooperation DIE EVOLUTION DER ROBOTIK BioRob reicht die Hand. Ein Roboter darf kein menschliches Wesen verletzen [...]
der klügere Roboter gibt nach BioRob Leichtbauroboter Für die sichere Mensch-Roboter-Kooperation DIE EVOLUTION DER ROBOTIK BioRob reicht die Hand. Ein Roboter darf kein menschliches Wesen verletzen [...]
Trainingssysteme für die Robotik. Mit den Schulungsrobotern auf leichte und verständliche Weise komplexe Themen der Robotik vermitteln
 Trainingssysteme für die Robotik Mit den Schulungsrobotern auf leichte und verständliche Weise komplexe Themen der Robotik vermitteln Automatisierungstechnik Trainingssysteme für die Robotik Der Start
Trainingssysteme für die Robotik Mit den Schulungsrobotern auf leichte und verständliche Weise komplexe Themen der Robotik vermitteln Automatisierungstechnik Trainingssysteme für die Robotik Der Start
Готовые к интеграции Системы позиционирования Каталог 2008
 Готовые к интеграции Системы позиционирования Каталог 2008 www.drivesets.de DriveSet MR105 Auswahlkriterien: Beschreibung Anwendungsgebiete Tragfähigkeitsklasse Geschwindigkeitsklasse Präzisionsklasse
Готовые к интеграции Системы позиционирования Каталог 2008 www.drivesets.de DriveSet MR105 Auswahlkriterien: Beschreibung Anwendungsgebiete Tragfähigkeitsklasse Geschwindigkeitsklasse Präzisionsklasse
Fragenkatalog CRS bei Herrn Dipl. Ing. Niedeck
 Fragenkatalog CRS bei Herrn Dipl. Ing. Niedeck 1. Was versteht man unter dem Begriff FRONTLOADING Dies ist eine kurzfristige Vorhabuntersuchung. Hierzu wird das Produkt untersucht ob dies zu fertigen ist.
Fragenkatalog CRS bei Herrn Dipl. Ing. Niedeck 1. Was versteht man unter dem Begriff FRONTLOADING Dies ist eine kurzfristige Vorhabuntersuchung. Hierzu wird das Produkt untersucht ob dies zu fertigen ist.
MotoLogix. Roboterprogrammierung über SPS. Robotics Division YASKAWA Europe GmbH. All Rights Reserved.
 MotoLogix Roboterprogrammierung über SPS Robotics Division 2016 2016 YASKAWA Europe GmbH. All Rights Reserved. Überblick: - Programmiersprachen in der Produktionszelle - MotoLogix - Komponenten - Kundenvorteile
MotoLogix Roboterprogrammierung über SPS Robotics Division 2016 2016 YASKAWA Europe GmbH. All Rights Reserved. Überblick: - Programmiersprachen in der Produktionszelle - MotoLogix - Komponenten - Kundenvorteile
Grundlagen. Seminar Einführung in die Robotertechnik
 Grundlagen Seminar Einführung in die Robotertechnik Was ist ein Roboter? Was ist ein Roboter? Was ist ein Roboter? Roboter beim Training Roboter Marke Eigenbau... Ein ganz kleiner Roboter... Humanoide
Grundlagen Seminar Einführung in die Robotertechnik Was ist ein Roboter? Was ist ein Roboter? Was ist ein Roboter? Roboter beim Training Roboter Marke Eigenbau... Ein ganz kleiner Roboter... Humanoide
Schnelle, bequeme und sichere Inbetrieb nahme durch einzig artige Bedienersoftware. WEISS Application Software
 SH 75 Dreheinheiten Hub-Dreheinheit SH 75 SH Hub-DrehEinheit WEISS Application Software Schnelle, bequeme und sichere Inbetrieb nahme durch einzig artige Bedienersoftware WEISS Application Software 198
SH 75 Dreheinheiten Hub-Dreheinheit SH 75 SH Hub-DrehEinheit WEISS Application Software Schnelle, bequeme und sichere Inbetrieb nahme durch einzig artige Bedienersoftware WEISS Application Software 198
Entwicklung einer allgemeinen dynamischen inversen Kinematik
 Entwicklung einer allgemeinen dynamischen inversen Kinematik Christoph Schmiedecke Studiendepartment Informatik Hochschule für Angewandte Wissenschaften Hamburg 06. Januar 2010 Inhaltsverzeichnis 1 Motivation
Entwicklung einer allgemeinen dynamischen inversen Kinematik Christoph Schmiedecke Studiendepartment Informatik Hochschule für Angewandte Wissenschaften Hamburg 06. Januar 2010 Inhaltsverzeichnis 1 Motivation
4. Roboterkinematiken
 4. Roboterkinematiken Begriffe Kinematik, Dynamik und Achsen Freiheitsgrad und Bewegungsfreiheitsgrad Symbolische Darstellung von Kinematiken Konfigurationen und Arbeitsräume Direkte und inverse Kinematik
4. Roboterkinematiken Begriffe Kinematik, Dynamik und Achsen Freiheitsgrad und Bewegungsfreiheitsgrad Symbolische Darstellung von Kinematiken Konfigurationen und Arbeitsräume Direkte und inverse Kinematik
Hexapoden in der Automatisierung
 Hexapoden in der Automatisierung Standardisierte Feldbusschnittstellen vereinfachen die Integration Seite 1 von 5 In vielen Bereichen der Automatisierungstechnik steigen die Anforderungen an die Präzision.
Hexapoden in der Automatisierung Standardisierte Feldbusschnittstellen vereinfachen die Integration Seite 1 von 5 In vielen Bereichen der Automatisierungstechnik steigen die Anforderungen an die Präzision.
SH HUB-DREHEINHEIT SH 75 DREHEINHEITEN HUB-DREHEINHEIT SH 75 WEISS APPLICATION SOFTWARE
 SH 75 DREHEINHEITEN HUB-DREHEINHEIT SH 75 SH HUB-DREHEINHEIT WEISS APPLICATION SOFTWARE Schnelle, bequeme und sichere Inbetrieb nahme durch einzig artige Bedienersoftware WEISS Application Software 198
SH 75 DREHEINHEITEN HUB-DREHEINHEIT SH 75 SH HUB-DREHEINHEIT WEISS APPLICATION SOFTWARE Schnelle, bequeme und sichere Inbetrieb nahme durch einzig artige Bedienersoftware WEISS Application Software 198
Robotik. Prüfung. Prüfer Note
 Prüfung Robotik Anmerkungen: Nur Blätter mit Namen und Matr.Nr. werden korrigiert. Keine rote Farbe verwenden. Zu jeder Lösung Aufgabennummer angeben. Aufgabe max. Punkte 1 a) 3 b) 2 c) 6 d) 3 e) 3 2 a)
Prüfung Robotik Anmerkungen: Nur Blätter mit Namen und Matr.Nr. werden korrigiert. Keine rote Farbe verwenden. Zu jeder Lösung Aufgabennummer angeben. Aufgabe max. Punkte 1 a) 3 b) 2 c) 6 d) 3 e) 3 2 a)
Die Positioniertechnik kann als externe Roboterachsen in die Robotersteuerung. Dies erleichtert die Programmierung.
 0. Roboterzellen 8 Roboterzellen Baureihe: EU-RBZ Ausführung: Unsere Roboterzellen sind standardmäßig mit Fanuc-Robotern ausgestattet. Die Positioniertechnik wird bei uns hergestellt und kann je nach Aufgabe
0. Roboterzellen 8 Roboterzellen Baureihe: EU-RBZ Ausführung: Unsere Roboterzellen sind standardmäßig mit Fanuc-Robotern ausgestattet. Die Positioniertechnik wird bei uns hergestellt und kann je nach Aufgabe
edesign LINEARROBOTER
 edesign LINEARROBOTER ROBOT MODELLREIHE FLEXIBILITÄT Die neue edesign Robot Serie ist entwickelt sowohl für Pick & Place Anwendungen als auch für Automatisierungen welche mehr Flexibilität fordern. Mit
edesign LINEARROBOTER ROBOT MODELLREIHE FLEXIBILITÄT Die neue edesign Robot Serie ist entwickelt sowohl für Pick & Place Anwendungen als auch für Automatisierungen welche mehr Flexibilität fordern. Mit
Volker Miegel, Robotics Deutschland / ABB Automation & Power World, 7./8. Juni 2011 Mensch-Robter-Kooperation: Die Zukunft der industriellen
 Volker Miegel, Robotics Deutschland / ABB Automation & Power World, 7./8. Juni 2011 Mensch-Robter-Kooperation: Die Zukunft der industriellen Montageautomatisierung Industrielle Montage in der Konsumgüterelektronik
Volker Miegel, Robotics Deutschland / ABB Automation & Power World, 7./8. Juni 2011 Mensch-Robter-Kooperation: Die Zukunft der industriellen Montageautomatisierung Industrielle Montage in der Konsumgüterelektronik
Neues Verfahren zur Roboterzielführung ohne Kalibrierung
 Lernende Roboterführung Roboteraugen werden autonomer, leistungsfähiger und genauer Neues Verfahren zur Roboterzielführung ohne Kalibrierung Unter dem Namen AURA (Adaptive Uncalibrated Robot Automation)
Lernende Roboterführung Roboteraugen werden autonomer, leistungsfähiger und genauer Neues Verfahren zur Roboterzielführung ohne Kalibrierung Unter dem Namen AURA (Adaptive Uncalibrated Robot Automation)
Raumportale Merkmale. Auf einen Blick Ein Raumportal (YXCR) ist ein Zusammenbau mehrerer Achsmodule
 ist ein Zusammenbau mehrerer Achsmodule") Merkmale Auf einen Blick Ein Raumportal (YXCR) ist ein Zusammenbau mehrerer Achsmodule (EHM /DHMZ) zur Erzeugung einer Bewegung im 3D Raum. Universell einsetzbar für leichte bis sehr schwere Werkstücke
Merkmale Auf einen Blick Ein Raumportal (YXCR) ist ein Zusammenbau mehrerer Achsmodule (EHM /DHMZ) zur Erzeugung einer Bewegung im 3D Raum. Universell einsetzbar für leichte bis sehr schwere Werkstücke
Herausforderungen für die Automation von robusten Produktionsprozessen für Faserverbundstrukturen
 Herausforderungen für die Automation von robusten Produktionsprozessen für Faserverbundstrukturen 18. Mai 2011 Dr. Tobias Gerngross, Thomas Schmidt, Florian Krebs Folie 1 Überblick Robuste Produktionsprozesse
Herausforderungen für die Automation von robusten Produktionsprozessen für Faserverbundstrukturen 18. Mai 2011 Dr. Tobias Gerngross, Thomas Schmidt, Florian Krebs Folie 1 Überblick Robuste Produktionsprozesse
C x Hexapod Motion Controller
 C-887.52x Hexapod Motion Controller Kompaktes Tischgerät zur Steuerung von 6-Achs-Systemen Leistungsfähiger Controller mit Vektorsteuerung Kommandierung in kartesischen Koordinaten Änderungen des Bezugssystems
C-887.52x Hexapod Motion Controller Kompaktes Tischgerät zur Steuerung von 6-Achs-Systemen Leistungsfähiger Controller mit Vektorsteuerung Kommandierung in kartesischen Koordinaten Änderungen des Bezugssystems
Robotik Mein Roboter erledigt das für mich
 myresearch Robotik Mein Roboter erledigt das für mich Wien 2008-11-06 Dipl. Ing.(FH) Christof Hieger Hieger C., Technikum Wien - Institut Mechatronics Übersicht 1. Do., 23.10.2008 Forschung und Entwicklung
myresearch Robotik Mein Roboter erledigt das für mich Wien 2008-11-06 Dipl. Ing.(FH) Christof Hieger Hieger C., Technikum Wien - Institut Mechatronics Übersicht 1. Do., 23.10.2008 Forschung und Entwicklung
1 Ein Roboter darf keinem Menschen verletzen oder diurch Unterlassung die Verletzung eines Menschen hervorrufen
 Robotik Vorbereitung Asimov s Robotergesetze 1 Ein Roboter darf keinem Menschen verletzen oder diurch Unterlassung die Verletzung eines Menschen hervorrufen 2 Roboter muß Anweisungen Menschen gehorchen,
Robotik Vorbereitung Asimov s Robotergesetze 1 Ein Roboter darf keinem Menschen verletzen oder diurch Unterlassung die Verletzung eines Menschen hervorrufen 2 Roboter muß Anweisungen Menschen gehorchen,
Quelle: BMW Group. Optische Doppelständer Robotermesszelle für Gesamtfahrzeuge im Prototypen- und Vorserienstatus.
 Quelle: BMW Group Optische Doppelständer Robotermesszelle für Gesamtfahrzeuge im Prototypen- und Vorserienstatus www.topometric.de BMW Group Optische Doppelständer Robotermesszelle für Gesamtfahrzeuge
Quelle: BMW Group Optische Doppelständer Robotermesszelle für Gesamtfahrzeuge im Prototypen- und Vorserienstatus www.topometric.de BMW Group Optische Doppelständer Robotermesszelle für Gesamtfahrzeuge
Wirtschaftlicher Technologievergleich der Antriebstechnik
 Wirtschaftlicher Technologievergleich der Antriebstechnik Elektrische Antriebe Pneumatik Hydraulik Energie ----- Steuerung ----- Leistung 1 Hydraulische Antriebstechnik Die Geschwindigkeiten selten über
Wirtschaftlicher Technologievergleich der Antriebstechnik Elektrische Antriebe Pneumatik Hydraulik Energie ----- Steuerung ----- Leistung 1 Hydraulische Antriebstechnik Die Geschwindigkeiten selten über
Industrieroboter in der spanenden Bearbeitung
 Markus Zapke (SIEMENS ENERGY) Industrieroboter in der spanenden Bearbeitung Praxisbeispiel Kantenbearbeitung von Turbinenbauteilen Security classification All rights reserved. http://siemens.com/energy/power-generation/gas-turbines
Markus Zapke (SIEMENS ENERGY) Industrieroboter in der spanenden Bearbeitung Praxisbeispiel Kantenbearbeitung von Turbinenbauteilen Security classification All rights reserved. http://siemens.com/energy/power-generation/gas-turbines
KUKA Ein Unternehmen im Wandel. Dr. Till Reuter (CEO) September 2011
 September 2011") KUKA Ein Unternehmen im Wandel Dr. Till Reuter (CEO) September 2011 Historie KUKA Wie alles begann 1898: Historie KUKA Geschichte im Überblick Gründung des Unternehmens durch Johann Josef Keller und Jakob
KUKA Ein Unternehmen im Wandel Dr. Till Reuter (CEO) September 2011 Historie KUKA Wie alles begann 1898: Historie KUKA Geschichte im Überblick Gründung des Unternehmens durch Johann Josef Keller und Jakob
Motion Controller. b Alle technischen Informationen zu den Produkten in diesem b
 Motion Controller b Alle technischen Informationen zu den Produkten in diesem b Inhalt PacDrive b Allgemeines v > Industriemaschinen... / >... / v.../ und / v.../ und / b v... / v... / v... / b Bestelldaten
Motion Controller b Alle technischen Informationen zu den Produkten in diesem b Inhalt PacDrive b Allgemeines v > Industriemaschinen... / >... / v.../ und / v.../ und / b v... / v... / v... / b Bestelldaten
Robotics. Automatisch erfolgreich Roboterlösungen für die Fertigung von Solarzellen und Solarmodulen
 Robotics Automatisch erfolgreich Roboterlösungen für die Fertigung von Solarzellen und Solarmodulen Automatisch für Sie ABB-Robotics entwickelt präzise Lösungen für die Automatisierung in vielen Bereichen,
Robotics Automatisch erfolgreich Roboterlösungen für die Fertigung von Solarzellen und Solarmodulen Automatisch für Sie ABB-Robotics entwickelt präzise Lösungen für die Automatisierung in vielen Bereichen,
Portabler Leichtbauroboter
 Portabler Leichtbauroboter Starke Argumente. Vielfältige Möglichkeiten. Gesamtgewicht nur 5,7 kg Einfache Installation Kraftvoll Wetterbeständig Kohlefaserstruktur Geringer Energieverbrauch Geräuscharm
Portabler Leichtbauroboter Starke Argumente. Vielfältige Möglichkeiten. Gesamtgewicht nur 5,7 kg Einfache Installation Kraftvoll Wetterbeständig Kohlefaserstruktur Geringer Energieverbrauch Geräuscharm
Robogistics Robotik und Logistik im Wandel 14. Dt. Materialflusskongress TU München, April 2005
 Robogistics Robotik und Logistik im Wandel 14. Dt. Materialflusskongress TU München, 7.-8. April 2005 Inhalt Einführung Logistische Konzepte Notwendige Komponenten Greiftechnologie Sensorik Praxisbeispiele
Robogistics Robotik und Logistik im Wandel 14. Dt. Materialflusskongress TU München, 7.-8. April 2005 Inhalt Einführung Logistische Konzepte Notwendige Komponenten Greiftechnologie Sensorik Praxisbeispiele
Fragebogen zur Programmierung mit Aseba / VPL
 Fragebogen zur Programmierung mit Aseba / VPL Liebe/er Schüler/in Mit diesem Fragebogen möchten wir die Anwendungsmöglichkeiten des Thymio-II Roboter und der Aseba/VPL Software verbessern. Bitte beantworte
Fragebogen zur Programmierung mit Aseba / VPL Liebe/er Schüler/in Mit diesem Fragebogen möchten wir die Anwendungsmöglichkeiten des Thymio-II Roboter und der Aseba/VPL Software verbessern. Bitte beantworte
Linienportale. Als elektrische Lösung frei positionierbar/beliebige Zwischenpositionen
 Linienportale Bewegungen in 2D: Ein Linienportal besteht aus einer Portalachse und einem Jochantrieb. Hohe mechanische Steifigkeit und robuster Aufbau Pneumatische und elektrische Komponenten frei kombinierbar
Linienportale Bewegungen in 2D: Ein Linienportal besteht aus einer Portalachse und einem Jochantrieb. Hohe mechanische Steifigkeit und robuster Aufbau Pneumatische und elektrische Komponenten frei kombinierbar
Vom Standardroboter zum Spezialisten
 Vom Standardroboter zum Spezialisten Inhalt Kurzporträt Stäubli Standardroboter Baureihen Technologie Eigenschaften Anwendungen Spezialroboter Einsatzzweck Modifikationen Anwendungen 2 Stäubli Konzern
Vom Standardroboter zum Spezialisten Inhalt Kurzporträt Stäubli Standardroboter Baureihen Technologie Eigenschaften Anwendungen Spezialroboter Einsatzzweck Modifikationen Anwendungen 2 Stäubli Konzern
Gemeinsame Pressekonferenz von Siemens und KUKA
 Gemeinsame Pressekonferenz von Siemens und KUKA Redner Manfred Gundel CEO KUKA Roboter GmbH Dr. Robert Neuhauser CEO Business Unit Motion Control Systems, Siemens-Division Drive Technologies Seite 2 Wandel
Gemeinsame Pressekonferenz von Siemens und KUKA Redner Manfred Gundel CEO KUKA Roboter GmbH Dr. Robert Neuhauser CEO Business Unit Motion Control Systems, Siemens-Division Drive Technologies Seite 2 Wandel
Bau eines mobilen, personengesteuerten Roboter
 Technische Universität Berlin Wintersemester 2013/14 PROJEKTDOKUMENTATION im Projektlabor Robotik MINTgrün Bau eines mobilen, personengesteuerten Roboter Projektleiter: Verfasser: Felix Bonowski Charlotte
Technische Universität Berlin Wintersemester 2013/14 PROJEKTDOKUMENTATION im Projektlabor Robotik MINTgrün Bau eines mobilen, personengesteuerten Roboter Projektleiter: Verfasser: Felix Bonowski Charlotte
IRC5 - Kooperative Steuerungsfunktionen für Industrieroboter
 Dr. Sönke Kock VDI/VDE GMA Fachausschuss 4.13 38. Sitzung IRC5 - Kooperative Steuerungsfunktionen für Industrieroboter Gliederung Definition Kooperation Kooperierende Roboter brauchen kooperative Steuerungsfunktionen
Dr. Sönke Kock VDI/VDE GMA Fachausschuss 4.13 38. Sitzung IRC5 - Kooperative Steuerungsfunktionen für Industrieroboter Gliederung Definition Kooperation Kooperierende Roboter brauchen kooperative Steuerungsfunktionen
Sigma Pick & Place Die bessere Alternative
 Sigma Pick & Place Die bessere Alternative inside Sigma S1 Einzelmodule: S1-H-5 S1-H-1 S1-V-5 Fahrzeiten für Horizontalbewegungen Hubzeit in [ms] 8 7 6 5 4 Hub 1 3 Hub 5 2 1,5 1, 1,5 2, 2,5 3, 3,5 4,5
Sigma Pick & Place Die bessere Alternative inside Sigma S1 Einzelmodule: S1-H-5 S1-H-1 S1-V-5 Fahrzeiten für Horizontalbewegungen Hubzeit in [ms] 8 7 6 5 4 Hub 1 3 Hub 5 2 1,5 1, 1,5 2, 2,5 3, 3,5 4,5
SO GEHT FORTSCHRITT: ROBOTER EINFACH SELBST PROGRAMMIEREN. KOCH ROBOTERSYSTEME Mehr begreifen Mehr bewegen!
 SO GEHT FORTSCHRITT: ROBOTER EINFACH SELBST PROGRAMMIEREN KOCH ROBOTERSYSTEME Mehr begreifen Mehr bewegen! Einen Industrieroboter zu programmieren ist keine leichte Aufgabe. Außer man verwendet einen Universal
SO GEHT FORTSCHRITT: ROBOTER EINFACH SELBST PROGRAMMIEREN KOCH ROBOTERSYSTEME Mehr begreifen Mehr bewegen! Einen Industrieroboter zu programmieren ist keine leichte Aufgabe. Außer man verwendet einen Universal
INFO BLATT. Das Handbediengerät fungiert als Dialog zwischen Mensch und Steuerung. Handbediengerät. Softwareausstattung SCP
 INFO BLATT Steuerung SCP Mit einer B&R - Steuerung verwalten wir über einen Feldbus die digitalen Servoantriebe und die meisten Ein- und Ausgänge (einige von ihnen direkt). Die Servoachsen können beliebig
INFO BLATT Steuerung SCP Mit einer B&R - Steuerung verwalten wir über einen Feldbus die digitalen Servoantriebe und die meisten Ein- und Ausgänge (einige von ihnen direkt). Die Servoachsen können beliebig
LBR iiwa. Mit Gefühl.
 LBR iiwa. Mit Gefühl. ii invite you KUKA Roboter GmbH R-IBD M. Micheler 12.06.2014 Seite 2 LBR iiwa die Features [+] Mobilität Programmieren durch Vormachen [+] Steuerung für sensorbasierte Robotik [+]
LBR iiwa. Mit Gefühl. ii invite you KUKA Roboter GmbH R-IBD M. Micheler 12.06.2014 Seite 2 LBR iiwa die Features [+] Mobilität Programmieren durch Vormachen [+] Steuerung für sensorbasierte Robotik [+]
SCHULUNGSKATALOG Stand 04/2015
 SCHULUNGSKATALOG Stand 04/2015 INHALT 1. FANUC ( RJ3iA -ic, R30iA - ib ) 3-6 1.1 Bedienerlehrgang 3 1.2 Grundkurs Programmierung Handling Tool 4 1.3 Aufbaukurs Programmierung Handling Tool 5 1.4 Quereinsteiger
SCHULUNGSKATALOG Stand 04/2015 INHALT 1. FANUC ( RJ3iA -ic, R30iA - ib ) 3-6 1.1 Bedienerlehrgang 3 1.2 Grundkurs Programmierung Handling Tool 4 1.3 Aufbaukurs Programmierung Handling Tool 5 1.4 Quereinsteiger
samos pro kompakte Sicherheitssteuerung
 samos pro kompakte Sicherheitssteuerung samos pro ist eine kompakte und leistungsfähige Sicherheitssteuerung für den Maschinenund Anlagenbau. Mit den nur 22,5 mm breiten Modulen sind programmierbare Sicherheitslösungen
samos pro kompakte Sicherheitssteuerung samos pro ist eine kompakte und leistungsfähige Sicherheitssteuerung für den Maschinenund Anlagenbau. Mit den nur 22,5 mm breiten Modulen sind programmierbare Sicherheitslösungen
Rückblick Motorik. Regelung Beispiel. Regelung. Intern - Tachometer. Interne Sensorik. Thomas Röfer
 Sensorik Rückblick Motorik Antriebs-/Lenkachse er Antrieb Thomas Röfer Steuerung und Regelung Interne Sensorik Rotation, Belastung,... Externe Sensorik Taktil,,,... Lenkmotor Stützräder Synchronantrieb
Sensorik Rückblick Motorik Antriebs-/Lenkachse er Antrieb Thomas Röfer Steuerung und Regelung Interne Sensorik Rotation, Belastung,... Externe Sensorik Taktil,,,... Lenkmotor Stützräder Synchronantrieb
Simply Universal. Neue Roboterbaureihen 6X Visual: 6-Achs Knickarmroboter 5X Line: Roboter mit 5 CNC Achsen. Für Spritzgießmaschinen von 20 4000 t
 Simply Universal Für Spritzgießmaschinen von 20 4000 t Neue Roboterbaureihen 6X Visual: 6-Achs Knickarmroboter 5X Line: Roboter mit 5 CNC Achsen Die Partnerschaft von zwei führenden Herstellern des Robotermarktes:
Simply Universal Für Spritzgießmaschinen von 20 4000 t Neue Roboterbaureihen 6X Visual: 6-Achs Knickarmroboter 5X Line: Roboter mit 5 CNC Achsen Die Partnerschaft von zwei führenden Herstellern des Robotermarktes:
Berlin Online Bahnkorrektur eines Industrieroboters basierend auf Laser-Messdaten
 Berlin 21.03.2014 Online Bahnkorrektur eines Industrieroboters basierend auf Laser-Messdaten Dipl. Ing. Kaveh Haddadian Gliederung 1. Vorstellung des Instituts 2. Motivation 3. Problemstellung / Lösungsidee
Berlin 21.03.2014 Online Bahnkorrektur eines Industrieroboters basierend auf Laser-Messdaten Dipl. Ing. Kaveh Haddadian Gliederung 1. Vorstellung des Instituts 2. Motivation 3. Problemstellung / Lösungsidee
Prof. J. Zhang Universität Hamburg. AB Technische Aspekte Multimodaler Systeme. 6. Januar 2005
 zhang@informatik.uni-hamburg.de Universität Hamburg AB Technische Aspekte Multimodaler Systeme zhang@informatik.uni-hamburg.de Inhaltsverzeichnis 7. Roboterregelung..........................370 Klassifikation
zhang@informatik.uni-hamburg.de Universität Hamburg AB Technische Aspekte Multimodaler Systeme zhang@informatik.uni-hamburg.de Inhaltsverzeichnis 7. Roboterregelung..........................370 Klassifikation
YuMi IRB Überblick
 YuMi IRB 14000 Überblick YuMi: IRB 14000 Agenda Überblick und Vision Hauptmerkmale Handhabungskapazität Arbeitsbereich Leistung und Genauigkeit Abmessungen Einfache Integration Ansicht Manipulator Tischmontage
YuMi IRB 14000 Überblick YuMi: IRB 14000 Agenda Überblick und Vision Hauptmerkmale Handhabungskapazität Arbeitsbereich Leistung und Genauigkeit Abmessungen Einfache Integration Ansicht Manipulator Tischmontage
Mess- und Regelungstechnik
 Mess- und Regelungstechnik Professor: Dr. Löffler Mang Semester: WS 00/01 Inhaltsverzeichnis 1. Thema 2. Das Mind- Storm- System 2.1 Der RCX 2.2 Die Sensoren 2.2.1 Der Tastsensor 2.2.2 Der Lichtsensor
Mess- und Regelungstechnik Professor: Dr. Löffler Mang Semester: WS 00/01 Inhaltsverzeichnis 1. Thema 2. Das Mind- Storm- System 2.1 Der RCX 2.2 Die Sensoren 2.2.1 Der Tastsensor 2.2.2 Der Lichtsensor
Programmieren mit RoboLab Bauen mit Lego
 Programmieren mit RoboLab 2.5.2 Bauen mit Lego 1. Doppelstunde Kommunikation zwischen Computer und RCX herstellen können. Motoren im und gegen den Uhrzeigersinn für eine bestimmte Zeit drehen lassen können.
Programmieren mit RoboLab 2.5.2 Bauen mit Lego 1. Doppelstunde Kommunikation zwischen Computer und RCX herstellen können. Motoren im und gegen den Uhrzeigersinn für eine bestimmte Zeit drehen lassen können.
Robotics. Flex Finishing Force Control Kraftsteuerung für Roboterbearbeitungsprozesse
 Robotics Flex Finishing Force Control Kraftsteuerung für Roboterbearbeitungsprozesse Force Control (FC) Der traditionelle Weg einen Roboter zu programmieren war, den Pfad, die Verfahrgeschwindigkeit sowie
Robotics Flex Finishing Force Control Kraftsteuerung für Roboterbearbeitungsprozesse Force Control (FC) Der traditionelle Weg einen Roboter zu programmieren war, den Pfad, die Verfahrgeschwindigkeit sowie
Handling mit Feingefühl servoelektrische Greifer mit individuell abgestimmter Greifkraft für Ihr Greifgut
 Handling mit Feingefühl servoelektrische Greifer mit individuell abgestimmter Greifkraft für Ihr Greifgut Flexible elektrische Greifsysteme für anspruchsvolle Greifaufgaben Ansteuerung von Position, Kraft
Handling mit Feingefühl servoelektrische Greifer mit individuell abgestimmter Greifkraft für Ihr Greifgut Flexible elektrische Greifsysteme für anspruchsvolle Greifaufgaben Ansteuerung von Position, Kraft
ONYX -S EINKANAL-PYROMETER ZUR OPTISCHEN TEMPERATURMESSUNG PRÄZISE TEMPERATURMESSUNG FÜR ANSPRUCHSVOLLE INDUSTRIEANWENDUNGEN
 ONYX -S EINKANAL-PYROMETER ZUR OPTISCHEN TEMPERATURMESSUNG PRÄZISE TEMPERATURMESSUNG FÜR ANSPRUCHSVOLLE INDUSTRIEANWENDUNGEN Genaue, reproduzierbare und zuverlässige Temperaturmessung unter härtesten industriellen
ONYX -S EINKANAL-PYROMETER ZUR OPTISCHEN TEMPERATURMESSUNG PRÄZISE TEMPERATURMESSUNG FÜR ANSPRUCHSVOLLE INDUSTRIEANWENDUNGEN Genaue, reproduzierbare und zuverlässige Temperaturmessung unter härtesten industriellen
BOHREN SÄGEN FRÄSEN STANZEN MESSEN TRANSPORTIEREN POSITIONIEREN MULTIFUNKTION
 er Längenanschlag MD-50m Bis 50 kg Messlineal Bis RD-200 Mit unserem manuellen Längenanschlag MD-50m bieten wir Ihnen einen preiswerten Längenanschlag mit einfachster Bedienbarkeit an, um die Produktivität
er Längenanschlag MD-50m Bis 50 kg Messlineal Bis RD-200 Mit unserem manuellen Längenanschlag MD-50m bieten wir Ihnen einen preiswerten Längenanschlag mit einfachster Bedienbarkeit an, um die Produktivität
Alexander Kamleithner, ABB AG, Summer School 28.Mai 2014 Sicherheitstechnik in der Robotik
 Alexander Kamleithner, ABB AG, Summer School 28.Mai 2014 Sicherheitstechnik in der Robotik Agenda 28.Mai 2014 09:00 09:30 Vorstellung ABB und Allgemeiner Überblick Robotertechnik 09:30 12:30 Block 1: Gruppe
Alexander Kamleithner, ABB AG, Summer School 28.Mai 2014 Sicherheitstechnik in der Robotik Agenda 28.Mai 2014 09:00 09:30 Vorstellung ABB und Allgemeiner Überblick Robotertechnik 09:30 12:30 Block 1: Gruppe
Gateway. Pluto. Profibus DP DeviceNet CANopen Ethernet. Anwendung: übermittlung von der Sicherheits-SPS. Merkmale:
 Pluto Gateway Anwendung: übermittlung von der Sicherheits-SPS Pluto Profibus DP DeviceNet CANopen Ethernet Merkmale: Bidirektionale Kommunikation Integrierte Filterfunktion, Aufteilung von Netzen Nur 22,5
Pluto Gateway Anwendung: übermittlung von der Sicherheits-SPS Pluto Profibus DP DeviceNet CANopen Ethernet Merkmale: Bidirektionale Kommunikation Integrierte Filterfunktion, Aufteilung von Netzen Nur 22,5
3.2. 3.1 Honen. A Honen und Schleifen. B Langhubhonen von Bohrungen
 Lernfeld 9 Feinbearbeitungsverfahren 3.2 3.1 Honen A Honen und Schleifen Beschreiben Sie das Fertigungsverfahren Honen und zeigen Sie den Unterschied zum Schleifen. Welche Honverfahren werden unterschieden?
Lernfeld 9 Feinbearbeitungsverfahren 3.2 3.1 Honen A Honen und Schleifen Beschreiben Sie das Fertigungsverfahren Honen und zeigen Sie den Unterschied zum Schleifen. Welche Honverfahren werden unterschieden?
Koordinaten, Transformationen und Roboter
 Koordinaten, Transformationen und Roboter Dipl.-Inform. Wolfgang Globke Institut für Algebra und Geometrie Arbeitsgruppe Differentialgeometrie Universität Karlsruhe 1 / 48 Einleitung Seit Anbeginn der
Koordinaten, Transformationen und Roboter Dipl.-Inform. Wolfgang Globke Institut für Algebra und Geometrie Arbeitsgruppe Differentialgeometrie Universität Karlsruhe 1 / 48 Einleitung Seit Anbeginn der
Unterrichtseinheit Technisches Zeichnen
 Unterrichtseinheit Technisches Zeichnen Schülerinnen und Schüler lernen technische Zeichnungen kennen und erstellen selber Skizzen. Sie erfahren, welche Arbeitsschritte zur Umsetzung von der Skizze zum
Unterrichtseinheit Technisches Zeichnen Schülerinnen und Schüler lernen technische Zeichnungen kennen und erstellen selber Skizzen. Sie erfahren, welche Arbeitsschritte zur Umsetzung von der Skizze zum
Technische Daten. HURON Fräszentren MU-TECH
 HURON Fräszentren MU-TECH HURON FRÄSMASCHINEN GMBH 70839 Gerlingen Deutschland Tel 07156 92836-12 www.huron.eu verkauf@huron.de TechDaten_Huron_Masch_MU-TECH_Jan2015.doc Page n 1 und Beschreibung Maschinen
HURON Fräszentren MU-TECH HURON FRÄSMASCHINEN GMBH 70839 Gerlingen Deutschland Tel 07156 92836-12 www.huron.eu verkauf@huron.de TechDaten_Huron_Masch_MU-TECH_Jan2015.doc Page n 1 und Beschreibung Maschinen
Radiuskorrektur 2 - Standardsteuerung. An- und Abfahren mit der Radiuskorrektur
 Radiuskorrektur 2 - Standardsteuerung An- und Abfahren mit der Radiuskorrektur Im ersten Teil wurde die Verhaltensweise der Radiuskorrektur während der Bearbeitung an einer Kontur beschrieben. Und das
Radiuskorrektur 2 - Standardsteuerung An- und Abfahren mit der Radiuskorrektur Im ersten Teil wurde die Verhaltensweise der Radiuskorrektur während der Bearbeitung an einer Kontur beschrieben. Und das
ROBOTER UND ROBOTERINNOVATIONEN FÜR DIE LOGISTIK. Kirt Laeske Swisslog AG, CH Buchs
 ROBOTER UND ROBOTERINNOVATIONEN FÜR DIE LOGISTIK Kirt Laeske Swisslog AG, CH Buchs Die Welt verändert sich Die Welt verändert sich Auswirkungen auf die Automatisierung Neue Anforderungen an die Logistik
ROBOTER UND ROBOTERINNOVATIONEN FÜR DIE LOGISTIK Kirt Laeske Swisslog AG, CH Buchs Die Welt verändert sich Die Welt verändert sich Auswirkungen auf die Automatisierung Neue Anforderungen an die Logistik
Einleitung 2. 1 Koordinatensysteme 2. 2 Lineare Abbildungen 4. 3 Literaturverzeichnis 7
 Sonja Hunscha - Koordinatensysteme 1 Inhalt Einleitung 2 1 Koordinatensysteme 2 1.1 Kartesisches Koordinatensystem 2 1.2 Polarkoordinaten 3 1.3 Zusammenhang zwischen kartesischen und Polarkoordinaten 3
Sonja Hunscha - Koordinatensysteme 1 Inhalt Einleitung 2 1 Koordinatensysteme 2 1.1 Kartesisches Koordinatensystem 2 1.2 Polarkoordinaten 3 1.3 Zusammenhang zwischen kartesischen und Polarkoordinaten 3
Verschmelzung von Motion Control, PLC und Robotik auf einer CPU
 Keywords Supplement TwinCAT Kinematik Roboter-Integration Robotersteuerung Transformation Delta-Kinematik Roboter-Kinematik Verschmelzung von Motion Control, PLC und Robotik auf einer CPU In diesem Application
Keywords Supplement TwinCAT Kinematik Roboter-Integration Robotersteuerung Transformation Delta-Kinematik Roboter-Kinematik Verschmelzung von Motion Control, PLC und Robotik auf einer CPU In diesem Application
Kapitel Grundlagen 1
 Kapitel1 8 1 Kapitel 1 1.1 Maschinenachsen Die Bewegungsachsen von numerisch gesteuerten Maschinen sind nach DIN 66217 bzw. ISO 841 in einem rechtwinkligen Koordinatensystem festgelegt. Dieses System bezieht
Kapitel1 8 1 Kapitel 1 1.1 Maschinenachsen Die Bewegungsachsen von numerisch gesteuerten Maschinen sind nach DIN 66217 bzw. ISO 841 in einem rechtwinkligen Koordinatensystem festgelegt. Dieses System bezieht
EINFÜHRUNG LEGO MINDSTORMS
 EINFÜHRUNG LEGO MINDSTORMS LabVIEW 2014 Prof. Dr.-Ing. Dahlkemper 1 NXT DIRECT COMMANDS Es gibt zwei verschiedene Möglichkeiten, die Lego-Roboter zu programmieren: Man kann das Programm direkt auf den
EINFÜHRUNG LEGO MINDSTORMS LabVIEW 2014 Prof. Dr.-Ing. Dahlkemper 1 NXT DIRECT COMMANDS Es gibt zwei verschiedene Möglichkeiten, die Lego-Roboter zu programmieren: Man kann das Programm direkt auf den
Handling mit Feingefühl. Die servoelektrischen Greifer mit der individuell abgestimmten Greifkraft für Ihr Greifgut.
 Handling mit Feingefühl Die servoelektrischen Greifer mit der individuell abgestimmten Greifkraft für Ihr Greifgut. SG30 SG50 SG150 hohe Positioniergenauigkeit und hohe Spannkraft bei kleinster Baugröße
Handling mit Feingefühl Die servoelektrischen Greifer mit der individuell abgestimmten Greifkraft für Ihr Greifgut. SG30 SG50 SG150 hohe Positioniergenauigkeit und hohe Spannkraft bei kleinster Baugröße
Hexamove Testing System PRJ00099
 Hexamove Testing System PRJ00099 Kräfte in 6 Freiheitsgraden Messen und Regeln Hohe Kräfte und Momente Hohe Präzision Programmierbar auf beliebigen Bezugspunkt Technology of Switzerland Einleitung Wie
Hexamove Testing System PRJ00099 Kräfte in 6 Freiheitsgraden Messen und Regeln Hohe Kräfte und Momente Hohe Präzision Programmierbar auf beliebigen Bezugspunkt Technology of Switzerland Einleitung Wie
Innovative Braunkohlen Integration in Mitteldeutschland ibi. Neue Strategien zur stofflichen Verwertung
 Innovative Braunkohlen Integration in Mitteldeutschland ibi. Neue Strategien zur stofflichen Verwertung Vortragsthema : GPS-Anwendungen in Leach Pad Systemen Referent : Gilbert Lilienthal am am 26. 26.
Innovative Braunkohlen Integration in Mitteldeutschland ibi. Neue Strategien zur stofflichen Verwertung Vortragsthema : GPS-Anwendungen in Leach Pad Systemen Referent : Gilbert Lilienthal am am 26. 26.
NC/CNC Handbuch 2003/2004
 NC/CNC Handbuch 2003/2004 NC, CNC, DNC, CAD, CAM, FFS, SPS, NC-Maschinen, NC-Roboter, LAN, Fachwortverzeichnis von Hans B. Kief 1. Auflage Hanser München 2003 Verlag C.H. Beck im Internet: www.beck.de
NC/CNC Handbuch 2003/2004 NC, CNC, DNC, CAD, CAM, FFS, SPS, NC-Maschinen, NC-Roboter, LAN, Fachwortverzeichnis von Hans B. Kief 1. Auflage Hanser München 2003 Verlag C.H. Beck im Internet: www.beck.de
Flächenportale Merkmale
 Merkmale Auf einen Blick Ein Flächenportal (YXCF) ist ein Zusammenbau mehrerer Achsmodule (EHM ) zur Erzeugung einer Bewegung im 2D Raum. Universell einsetzbar für leichte bis sehr schwere Werkstücke bzw.
Merkmale Auf einen Blick Ein Flächenportal (YXCF) ist ein Zusammenbau mehrerer Achsmodule (EHM ) zur Erzeugung einer Bewegung im 2D Raum. Universell einsetzbar für leichte bis sehr schwere Werkstücke bzw.
Gliederung. Differentielle Bewegungen. Gliederung (cont.)
") - Gliederung Jianwei Zhang zhang@informatik.uni-hamburg.de Fakultät für Mathematik, Informatik und Naturwissenschaften Technische Aspekte Multimodaler Systeme 15. May 2012 Allgemeine Informationen Einführung
- Gliederung Jianwei Zhang zhang@informatik.uni-hamburg.de Fakultät für Mathematik, Informatik und Naturwissenschaften Technische Aspekte Multimodaler Systeme 15. May 2012 Allgemeine Informationen Einführung
Fräsen ohne Radiuskorrektur Mit Berechnung der Fräsermittelpunktsbahn
 Fräsen ohne Radiuskorrektur Mit Berechnung der Fräsermittelpunktsbahn Wer mit einer Uralt-NC oder einer Eigenbausteuerung arbeitet, kann oft nicht auf die Fräserradiuskorrektur G41 / G42 zurück greifen
Fräsen ohne Radiuskorrektur Mit Berechnung der Fräsermittelpunktsbahn Wer mit einer Uralt-NC oder einer Eigenbausteuerung arbeitet, kann oft nicht auf die Fräserradiuskorrektur G41 / G42 zurück greifen
WSG. Anwendungsbeispiel. Elektrisch 2-Finger-Parallelgreifer Universalgreifer. Baugrößen 50. Greifkraft 120 N. Eigenmasse 1.2 kg
 Baugrößen 50 Eigenmasse 1.2 kg Greifkraft 120 N Hub pro Backe 55 mm Werkstückgewicht 0.8 kg Anwendungsbeispiel Roboter zur flexiblen Be- und Entladung von sensiblen Werkstücken Servoelektrischer 2-Finger-Parallelgreifer
Baugrößen 50 Eigenmasse 1.2 kg Greifkraft 120 N Hub pro Backe 55 mm Werkstückgewicht 0.8 kg Anwendungsbeispiel Roboter zur flexiblen Be- und Entladung von sensiblen Werkstücken Servoelektrischer 2-Finger-Parallelgreifer
Bewegungsbefehle. Bewegungsbefehle eines Roboters enthalten folgende Angaben:
 Bewegungsbefehle Bewegungsbefehle eines Roboters enthalten folgende Angaben: eine Roboterstellung detaillierte Angaben zu der Bewegung, mit der der die betreffende Roboterstellung angefahren werden soll.
Bewegungsbefehle Bewegungsbefehle eines Roboters enthalten folgende Angaben: eine Roboterstellung detaillierte Angaben zu der Bewegung, mit der der die betreffende Roboterstellung angefahren werden soll.
Radiuskorrektur 3. Beispiele zur Radiuskorrektur
 Radiuskorrektur 3 Beispiele zur Radiuskorrektur Zuerst nochmals die schon bekannte Werkstückkontur, diesmal komplett Fräsen der Kontur 10mm tief mit Schaftfräser Ø 20mm im Gleichlauf Anfang und Ende am
Radiuskorrektur 3 Beispiele zur Radiuskorrektur Zuerst nochmals die schon bekannte Werkstückkontur, diesmal komplett Fräsen der Kontur 10mm tief mit Schaftfräser Ø 20mm im Gleichlauf Anfang und Ende am
Radiuskorrektur 4. Ergänzung für Spezielle Steuerung. Anfahren mit der Radiuskorrektur
 Radiuskorrektur 4 Ergänzung für Spezielle Steuerung Anfahren mit der Radiuskorrektur Im ersten Teil wurde die Verhaltensweise der Radiuskorrektur während der Bearbeitung an einer Kontur beschrieben. Und
Radiuskorrektur 4 Ergänzung für Spezielle Steuerung Anfahren mit der Radiuskorrektur Im ersten Teil wurde die Verhaltensweise der Radiuskorrektur während der Bearbeitung an einer Kontur beschrieben. Und
Ministerium für Kultus, Jugend und Sport Baden-Württemberg
 Ministerium für Kultus, Jugend und Sport Baden-Württemberg Schulversuch 41-6621.10-05/1 vom 27. April 2012 Bildungsplan für die Berufsschule Zusatzqualifikation CAD/CNC-Fachkraft Holztechnik Schuljahr
Ministerium für Kultus, Jugend und Sport Baden-Württemberg Schulversuch 41-6621.10-05/1 vom 27. April 2012 Bildungsplan für die Berufsschule Zusatzqualifikation CAD/CNC-Fachkraft Holztechnik Schuljahr
aflex Die flexible Komponente Faszination Bewegung. Gestern. Heute. Morgen.
 aflex Die flexible Komponente Faszination Bewegung. Gestern. Heute. Morgen. aflex die flexible Zuführkomponente Die Systemkomponente aflex wurde als Komponente für komplexe Anforderungen im Bereich Zuführtechnik
aflex Die flexible Komponente Faszination Bewegung. Gestern. Heute. Morgen. aflex die flexible Zuführkomponente Die Systemkomponente aflex wurde als Komponente für komplexe Anforderungen im Bereich Zuführtechnik
Softstarter SMC-Flex kw
 Softstarter SMC-Flex 0.37 450 kw Kompakte Bauform: - Der SMC - Flex beinhaltet Features die bis jetzt in Softstarter nicht verfügbar waren. - Integrierter Motorschutz und eingebauter Bypass/3Phasig - Anbindung
Softstarter SMC-Flex 0.37 450 kw Kompakte Bauform: - Der SMC - Flex beinhaltet Features die bis jetzt in Softstarter nicht verfügbar waren. - Integrierter Motorschutz und eingebauter Bypass/3Phasig - Anbindung
ONYX -S2C ZWEIFARBIGES QUOTIENTEN-PYROMETER ZUR OPTISCHEN TEMPERATURMESSUNG PRÄZISE TEMPERATURMESSUNG FÜR ANSPRUCHSVOLLE INDUSTRIEANWENDUNGEN
 ONYX -S2C ZWEIFARBIGES QUOTIENTEN-PYROMETER ZUR OPTISCHEN TEMPERATURMESSUNG PRÄZISE TEMPERATURMESSUNG FÜR ANSPRUCHSVOLLE INDUSTRIEANWENDUNGEN Genaue, reproduzierbare und zuverlässige Temperaturmessung
ONYX -S2C ZWEIFARBIGES QUOTIENTEN-PYROMETER ZUR OPTISCHEN TEMPERATURMESSUNG PRÄZISE TEMPERATURMESSUNG FÜR ANSPRUCHSVOLLE INDUSTRIEANWENDUNGEN Genaue, reproduzierbare und zuverlässige Temperaturmessung
Was ist Physik? Modell der Natur universell es war schon immer so
 Was ist Physik? Modell der Natur universell es war schon immer so Kultur Aus was sind wir gemacht? Ursprung und Aufbau der Materie Von wo/was kommen wir? Ursprung und Aufbau von Raum und Zeit Wirtschaft
Was ist Physik? Modell der Natur universell es war schon immer so Kultur Aus was sind wir gemacht? Ursprung und Aufbau der Materie Von wo/was kommen wir? Ursprung und Aufbau von Raum und Zeit Wirtschaft
AMU, maskin og værktøj. CNC-Drehe Technik, Bediener. Kursnummer 45187. Udviklet af EUCSyd, Sønderborg 1
 CNC-Drehe Technik, Bediener Kursnummer 45187 Udviklet af EUCSyd, Sønderborg 1 Inhaltsverzeichnis Inhaltsverzeichnis... 2 Kursusinformation... 3 CNC-Werkzeugmaschinen... 4 Koordinatensystem... 5 Übung 1
CNC-Drehe Technik, Bediener Kursnummer 45187 Udviklet af EUCSyd, Sønderborg 1 Inhaltsverzeichnis Inhaltsverzeichnis... 2 Kursusinformation... 3 CNC-Werkzeugmaschinen... 4 Koordinatensystem... 5 Übung 1
Neue Technologien für die sichere Mensch- Roboter-Interaktion. Geschäftsfeld Robotersysteme
 Geschäftsfeld Robotersysteme 1 Aktuelle Arbeitsfelder im Geschäftsfeld Robotersysteme Serviceroboter für Inspektion, Reinigung und Wartung Mobile Assistenzrobotik Robotik- und Handhabungstechnik für Industrie
Geschäftsfeld Robotersysteme 1 Aktuelle Arbeitsfelder im Geschäftsfeld Robotersysteme Serviceroboter für Inspektion, Reinigung und Wartung Mobile Assistenzrobotik Robotik- und Handhabungstechnik für Industrie
Feldbus & Netzwerk Technologie
 Feldbus & Netzwerk Technologie Feldbustechnologie Motivation Grundlegende Merkmale von Bussystemen Feldbussysteme PROFIBUS DP Ethernet AS-Interface INTERBUS CANopen 2 Motivation Was ist ein Feldbus? -
Feldbus & Netzwerk Technologie Feldbustechnologie Motivation Grundlegende Merkmale von Bussystemen Feldbussysteme PROFIBUS DP Ethernet AS-Interface INTERBUS CANopen 2 Motivation Was ist ein Feldbus? -
NEU LMS 400. Lasermesssystem LMS 400 Pole-Position für Robotik und Material-Handling. Produktinformation
 NEU LMS 400 Produktinformation Lasermesssystem LMS 400 Pole-Position für Robotik und Material-Handling. LMS 400 Mehr bewegen mit Präzision und Zuverlässigkeit. Lasermesssystem LMS 400. Die Handlings- und
NEU LMS 400 Produktinformation Lasermesssystem LMS 400 Pole-Position für Robotik und Material-Handling. LMS 400 Mehr bewegen mit Präzision und Zuverlässigkeit. Lasermesssystem LMS 400. Die Handlings- und
Integration eines pneumatischen Roboters in die Robotics API
 Integration eines pneumatischen Roboters in die Robotics API Ziel: Integration eines AirArms in die Robotics API und Umsetzung eines Demo-Anwendung Idee: Die MRK (Mensch Roboter Kooperation) bekommt zunehmend
Integration eines pneumatischen Roboters in die Robotics API Ziel: Integration eines AirArms in die Robotics API und Umsetzung eines Demo-Anwendung Idee: Die MRK (Mensch Roboter Kooperation) bekommt zunehmend
MITSUBISHI - RH-3SDHR, RP-1/3/5ADH 55.2 MITSUBISHI - RH-3FH/6FH/12FH/20FH 55.3 MITSUBISHI - RV-2FB/4F/4FL 55.7
 www.geva.info ROBOTER Index Warengruppe 55 MITSUBISHI - RH-3SDHR, RP-1/3/5ADH 55.2 MITSUBISHI - RH-3FH/6FH/12FH/20FH 55.3 MITSUBISHI - RV-2FB/4F/4FL 55.7 MITSUBISHI - RV-4FM/4FLM/7F/7FL/7FM/7FLM 55.8 MITSUBISHI
www.geva.info ROBOTER Index Warengruppe 55 MITSUBISHI - RH-3SDHR, RP-1/3/5ADH 55.2 MITSUBISHI - RH-3FH/6FH/12FH/20FH 55.3 MITSUBISHI - RV-2FB/4F/4FL 55.7 MITSUBISHI - RV-4FM/4FLM/7F/7FL/7FM/7FLM 55.8 MITSUBISHI
Sie fordern ganzheitliche Systeme. Sie wollen minimalen Aufwand. Wir sind Ihr Partner für passende Lösungen.
 Handlingsysteme Sie fordern ganzheitliche Systeme. Sie wollen minimalen Aufwand. Wir sind Ihr Partner für passende Lösungen. Handlingsysteme von Festo: Vielfältig, passgenau, wirtschaftlich. Sie suchen
Handlingsysteme Sie fordern ganzheitliche Systeme. Sie wollen minimalen Aufwand. Wir sind Ihr Partner für passende Lösungen. Handlingsysteme von Festo: Vielfältig, passgenau, wirtschaftlich. Sie suchen