Einführung in die Robotik
|
|
|
- Stefanie Kruse
- vor 5 Jahren
- Abrufe
Transkript
 731 / 50 24153 mohamed.")
1 Einführung in die Robotik Vorlesung 1 14 Oktober 2008 Dr. Mohamed Oubbati Institut für Neuroinformatik Tel.: (+49) 731 / mohamed.oubbati@uni-ulm.de WS 2008/2009
2 Heutiges Thema: Allgemeines
3 Homepage der Vorlesung Skript & Foliensammlung Sprechstunde: fast jede Zeit, nur bitte vorher anmelden. M. Oubbati Raum O27 / 4306 tel.: (+49) 731 / fax.: (+49) 731 / mohamed.oubbati@uni-ulm.de
4 Was ist Robotik?

5 Das Wort Roboter! Der Begriff Roboter kommt vom slawischen Wort robot (Zwang-) Arbeit übersetzt werden kann. Das erste Auftreten dieses Begriffs ist in dem Theaterstück R.U.R. (Rossum's Universal Robots) zu finden (von Karel Capek 1923).
6 What is robotics? We don t know exactly!...
7 Was ist Robotik? Definition der RIA (Robot Institute of America, 1979): a robot is a reprogrammable, multifunctional manipulator designed to move material, parts, tools, or specialized devices through various programmed motions for the performance of a variety of tasks. Ein Roboter ist ein programmierbares Mehrzweck-Handhabungsgerät für das Bewegen von Material, Werkstücken, Werkzeugen oder Spezialgeräten. Der frei programmierbare Bewegungsablauf macht ihn für verschiedene Aufgaben einsetzbar. Roboticists today are not agree with this definition! Until now there is no general definition for Robotics
8 Asimov's Law Der wichtigste Aspekt in der Robotik ist die Sicherheit für die Menschen. Dazu schlug Issac Asimaov die drei Gesetze der Robotik vor, die wie folgt lauten: 1. Ein Roboter darf keinen Menschen verletzen. 2. Ein Roboter muss den Anweisungen gehorchen, die ihm von Menschen gegeben werden, außer wenn diese dem ersten Gesetz widersprechen. 3. Ein Roboter muss seine eigene Existenz solange zu sichern versuchen, wie dies nicht dem ersten oder zweiten Gesetz widerspricht.
9 Einsatzgebiete
 So ein Roboter ist für einen eindeutigen und repetitiven Arbeitsablauf")
10 Einsatzgebiete Industrie Arm Roboter (von ABB) Armroboter im Rohbau der Mercedes A-Klasse (KUKA GmbH) So ein Roboter ist für einen eindeutigen und repetitiven Arbeitsablauf ausgelegt.


11 Einsatzgebiete Die Roboter erobern jetzt auch das Wohnzimmer! Zwei Roboter-Staubsauger Personal roboter


12 Einsatzgebiete Service Roboter Elder Assistant (FHG IPA- Stuttgart) Service Roboter (Forschungszentrum Informatik-Karlsruhe)

")
13 Einsatzgebiete Forschung Forschungsroboter können Vulkane oder Abwasserrohre vordringen, und sie können sogar andere Planeten erkunden. Fraunhofer IAIS (Sankt Augustin, Deutschland) Mars Rover (NASA)

14 Einsatzgebiete Medizin Der Vorteil von Robotern in der Medizin ist die Unabhängigkeit von mentalen Einflüssen und natürlich die konstante Arbeitsleistung. Uni Stuttgart

15 Einsatzgebiete Militär So ein Soldat hat keinen Hunger, kriegt keinen Sold, und vor allem kennt keine Angst! Assault TALON (US-Army)
 genutzt. Drone: MQ-1 Predator UAV (U.")
16 Einsatzgebiete Militär Um feindliches Gebiet auszuspionieren werden Roboter (Dronen) genutzt. Drone: MQ-1 Predator UAV (U.S Airforce).




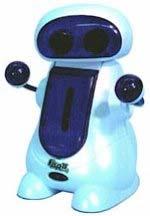


17 Einsatzgebiete Entertainment robots
18 Einsatzgebiete Worldwide robotics market (35% are in the EU) Source: Japan Robotics Association
.")
19 Einsatzgebiete What about Germany? Germany has the world s highest robot density. For every 10,000 persons employed in the German industry, there were 148 industrial robots (year 2003). Source: United Nations Economic Commission for Europe
20 Autonome Roboter
21 Was ist ein autonomer Roboter? Autonom bedeutet, dass der Roboter ohne externe Unterstützung in seiner Umgebung funktionieren kann. Je nach Einsatzumgebung kann die Autonomie in verschiedene Grade unterteilt werden.
22 Klassifikation von Robotern Es gibt insgesamt zwei Hauptgruppen von Robotern, welche in unterschiedlichen Gebieten eingesetzt werden. Stationäre Roboter Mobile Roboter
23 Was ist ein Stationäre Roboter? Wie der Name schon sagt, ein stationärer Roboter ist an einem festen Punkt gebunden. Industrie Roboter (ABB)
24 Was ist ein mobiler Roboter? Mobile Ein Roboter wird mobile genannt, wenn er sich in seiner Umgebung (Land, Wasser, Luft) bewegen kann. Bewegungsarten: Fahren, Laufen, Fliegen, Schwimmen usw.

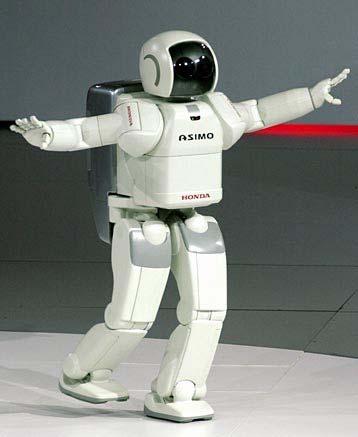
 Fliegen ASIMO")

25 Fahren Laufen Roboter Stanley (Standford- Univ USA) Fliegen ASIMO (Honda) Schimmen Technische Uni-Berlin MIT- Institute (USA)
26 Anforderungen der Anwender Ein mobiler Roboter soll fähig sein, effizient und kollisionsfrei in seiner Umgebung zu bewegen. Hindernisse Das Ziel
27 Insect-inspired bug Algorithms goal Switching between two simple behaviors: moving toward the goal. follow obstacles until you can head toward the goal again Beispiel: Program Bug 1 Repeat: 1. Head toward the goal. 2. If the goal is attained then stop. start 3. If contact is made with an obstacle then follow the obstacle s boundary (toward the left) until heading toward the goal is possible again.
28 bug Algorithms funktioniern nicht immer! goal Hier funktioniert Bug 1 nicht! start

29 Let see a short History Shakey ( , Stanford Research Institute USA) First AI robot Leave in a world of blocks Model based - Modell-Abhängig - Langsame Reaktion
30 Sense-Plan-Act Welt Sensoren Plan Aktoren Welt
31 Sense-Plan-Act Welt Sensoren Sensordaten erfassen Weltmodel Planen Agieren Aktoren Welt
32 Sense-Plan-Act Auf der Grundlage des Weltmodells können optimale Lösungen gefunden werden Alle Module sind voneinander abhängig (wenn ein Module ausfällt, das gesamte System fällt aus) Veränderungen der Umgebung erfordern Anpassung des Weltmodells.

33 Genghis (Massachusetts Institute of Technology) Behavior based control Brooks, Rodney A. A Robot That Walks; Emergent Behaviors from a Carefully Evolved Network MIT AI Lab Memo 1091, February beiniger Roboter Dezentrale Steuerung Aus den einzelnen Reaktionen setzt sich die Fortbewegung zusammen
34 Behavior-based Robotics (Brooks, MIT Lab 1986) PLAN SENSE ACT SENSE-ACT couplings are called behaviors SENSE ACT Behaviors are independent, and run in parallel SENSE ACT
35 Behavior-based Robotics Einfache reactive behaviors können ein komplexes Behavior erzeugen. Welt Sensoren Sensordaten erfassen Hindernis vermeiden Zielanfahren Objekterkennen Verhaltensfusion Aktoren Welt
36 Behavior-based Robotics Fahren Motors Das Verhalten Fahren bewegt den Roboter Vorwärts.
37 Behavior-based Robotics Ultraschall, Laser Avoid Fahren Arbiter Motors Das Verhalten Avoid : Wenn ein Hindernis nah ist, Stop und dann mit 90 Grad umdrehen.
38 Behavior-based Robotics Bumper Ultraschall, Laser Escape Avoid Arbitration Techniques - Fixed priority - Random priority Fahren Arbiter Motors Das Verhalten Escape : Stop, 50 cm Rückwärtsfahren, und dann 90 Grad umdrehen.
39 Behavior-based Robotics kein Weltmodell ist notwendig Einfacher Entwurf und Implementierung, da jede Ebene für sich betrachtet werden kann. Robust: die Ebenen sind voneinander unabhängig. Pläne und Optimierungen sind schwer zu implementieren
 Fahrerlos (autonom) durch die Wüste 2 Millions $ Preisgeld vom Pentagon In 23 Teams nur 5")
40 Beispiel für autonome mobile Roboter Grand DARPA Challenge Meilen (212.4 km) Fahrerlos (autonom) durch die Wüste 2 Millions $ Preisgeld vom Pentagon In 23 Teams nur 5 Teams erreichten das Ziel!
41 Was wollen wir in dieser Vorlesung lernen?
42 Was wir lernen wollen Cognitive level (perhaps just an introduction) Path-planing, Potential fields, - Target acquisition - Obstacle avoidance Reactive level control Sensors Low-level control PID controllers Environment Robot - kinematic control. - dynamic control.
43 Geplante Inhalte Einführung Grundbestandteile eines Roboters Kinematik Bewegungsregelung Einführung in die Navigation
44 Geplante Inhalte Grundbestandteile eines Roboters Sensoren Aktoren A/D & D/A Wandler
45 Geplante Inhalte Kinematik Antriebskonzepte Vorwärtskinematik Rückwärtskinematik
46 Geplante Inhalte Bewegungsregelung Regelung PID Regler Motion Control
47 Geplante Inhalte Navigation Lokalisierung Bahnplanung Steuerungsarchitekturen

48 Ulm University Neural Fields for Mobile Robot Navigation


49 Ulm University Biologically inspired control for humanoid robot Recurrent Neural Networks for motion control


50 Ulm University - Behavior-based control with neural networks - Learning Skills - Artificial Curiosity
51 Robotikveranstaltungen WS2008/2009 Praktika, Diplomarbeiten, Masterarbeit Neural Fields for Robot Navigation. Biologically inspired motion control for Humanoid robot. Behavior-based control with recurrent neural networks. Bitte bei mir melden, wenn sie Interesse haben!
Einführung in die Robotik
 Einführung in die Robotik Vorlesung 2 30 Oktober 2007 Dr. Mohamed Oubbati Institut für Neuroinformatik WS 2007 Was will ich in dieser Vorlesung erreichen? Ich will dass sie eine Grundlage haben um: 1.
Einführung in die Robotik Vorlesung 2 30 Oktober 2007 Dr. Mohamed Oubbati Institut für Neuroinformatik WS 2007 Was will ich in dieser Vorlesung erreichen? Ich will dass sie eine Grundlage haben um: 1.
Autonome Mobile Systeme
 Dr. Mohamed Oubbati Institut für Neuroinformatik Universität Ulm SS 2007 Heutiges Thema: Mobile Roboter Ein Mobiler Roboter ist ein System, das mit einer Recheneinheit, Sensoreinheit, und Bewegungseinheit
Dr. Mohamed Oubbati Institut für Neuroinformatik Universität Ulm SS 2007 Heutiges Thema: Mobile Roboter Ein Mobiler Roboter ist ein System, das mit einer Recheneinheit, Sensoreinheit, und Bewegungseinheit
Einführung in die Robotik Autonome Mobile Roboter
 Einführung in die Robotik Autonome Mobile Roboter Mohamed Oubbati Institut für Neuroinformatik Tel.: (+49) 731 / 50 24153 mohamed.oubbati@uni-ulm.de 30. 10. 2012 Klassifikation von Robotern Klassifikation
Einführung in die Robotik Autonome Mobile Roboter Mohamed Oubbati Institut für Neuroinformatik Tel.: (+49) 731 / 50 24153 mohamed.oubbati@uni-ulm.de 30. 10. 2012 Klassifikation von Robotern Klassifikation
Autonome Roboter. Von Matthias Hauth Seminar Moderne Robotik
 Autonome Roboter Von Matthias Hauth Seminar Moderne Robotik Inhalt Autonome Roboter Mobile Roboter Roboter Architekturen Deliberative, reactive (z.b. Genghis), hybrid Gegenüberstellung deliberative - reactive
Autonome Roboter Von Matthias Hauth Seminar Moderne Robotik Inhalt Autonome Roboter Mobile Roboter Roboter Architekturen Deliberative, reactive (z.b. Genghis), hybrid Gegenüberstellung deliberative - reactive
Einführung in die Robotik Steuerungsarchitekturen. Mohamed Oubbati Institut für Neuroinformatik. Tel.: (+49) 731 / 50 24153 mohamed.oubbati@uni-ulm.
 731 / 50 24153 mohamed.oubbati@uni-ulm.") Einführung in die Robotik Steuerungsarchitekturen Mohamed Oubbati Institut für Neuroinformatik Tel.: (+49) 731 / 50 24153 mohamed.oubbati@uni-ulm.de 29. 01. 2013 Steuerungsarchitekturen - Deliberative
Einführung in die Robotik Steuerungsarchitekturen Mohamed Oubbati Institut für Neuroinformatik Tel.: (+49) 731 / 50 24153 mohamed.oubbati@uni-ulm.de 29. 01. 2013 Steuerungsarchitekturen - Deliberative
Einführung in die Robotik Einführung. Mohamed Oubbati Institut für Neuroinformatik. Tel.: (+49) 731 / 50 24153 mohamed.oubbati@uni-ulm.de 23. 10.
 731 / 50 24153 mohamed.oubbati@uni-ulm.de 23. 10.") Einführung in die Robotik Einführung Mohamed Oubbati Institut für Neuroinformatik Tel.: (+49) 731 / 50 24153 mohamed.oubbati@uni-ulm.de 23. 10. 2012 Was ist ein Roboter? Was ist ein Roboter? Jeder hat
Einführung in die Robotik Einführung Mohamed Oubbati Institut für Neuroinformatik Tel.: (+49) 731 / 50 24153 mohamed.oubbati@uni-ulm.de 23. 10. 2012 Was ist ein Roboter? Was ist ein Roboter? Jeder hat
Einführung in die Robotik
 Einführung in die Robotik Vorlesung 7 13 Januar 2009 Dr. Mohamed Oubbati Institut für Neuroinformatik WS 2008/2009 Wiederholung vom letzten Mal! Signalverarbeitungskette Bewegungsregelung A/D Wandler D/A
Einführung in die Robotik Vorlesung 7 13 Januar 2009 Dr. Mohamed Oubbati Institut für Neuroinformatik WS 2008/2009 Wiederholung vom letzten Mal! Signalverarbeitungskette Bewegungsregelung A/D Wandler D/A
Einführung in die Robotik
 Einführung in die Robotik Vorlesung 10 5 Februar 008 Dr. Mohamed Oubbati Institut für Neuroinformatik WS 007/008 Heutiges Thema: Navigation Navigation Wie bewege ich mich sinnvoll in meiner Umgebung? Hindernisse
Einführung in die Robotik Vorlesung 10 5 Februar 008 Dr. Mohamed Oubbati Institut für Neuroinformatik WS 007/008 Heutiges Thema: Navigation Navigation Wie bewege ich mich sinnvoll in meiner Umgebung? Hindernisse
Kybernetik Intelligent Agents- Decision Making
 Kybernetik Intelligent Agents- Decision Making Mohamed Oubbati Institut für Neuroinformatik Tel.: (+49) 731 / 50 24153 mohamed.oubbati@uni-ulm.de 03. 07. 2012 Intelligent Agents Environment Agent Intelligent
Kybernetik Intelligent Agents- Decision Making Mohamed Oubbati Institut für Neuroinformatik Tel.: (+49) 731 / 50 24153 mohamed.oubbati@uni-ulm.de 03. 07. 2012 Intelligent Agents Environment Agent Intelligent
Kybernetik Einführung
 Kybernetik Einführung Mohamed Oubbati Institut für Neuroinformatik Tel.: (+49) 731 / 50 24153 mohamed.oubbati@uni-ulm.de 24. 04. 2012 Einführung Was ist Kybernetik? Der Begriff Kybernetik wurde im 1948
Kybernetik Einführung Mohamed Oubbati Institut für Neuroinformatik Tel.: (+49) 731 / 50 24153 mohamed.oubbati@uni-ulm.de 24. 04. 2012 Einführung Was ist Kybernetik? Der Begriff Kybernetik wurde im 1948
Verteilte Systeme / Kooperierende Roboter
 Verteilte Systeme / Kooperierende Roboter Proseminar Anwendungen und Methoden der Modernen Robotik SoSe 2005 Uni Hamburg Claudius Herder, Justus Winter 4herder@informatik.uni-hamburg.de, 4winter@informatik.uni-hamburg.de
Verteilte Systeme / Kooperierende Roboter Proseminar Anwendungen und Methoden der Modernen Robotik SoSe 2005 Uni Hamburg Claudius Herder, Justus Winter 4herder@informatik.uni-hamburg.de, 4winter@informatik.uni-hamburg.de
Einführung in die Robotik
 Einführung in die Robotik Vorlesung 6 04 Dezember 2007 Dr. Mohamed Oubbati Institut für Neuroinformatik WS 2007/2008 Heutiges Thema: Kinematik Einführung Was ist die Kinematik? Die Kinematik beschäftigt
Einführung in die Robotik Vorlesung 6 04 Dezember 2007 Dr. Mohamed Oubbati Institut für Neuroinformatik WS 2007/2008 Heutiges Thema: Kinematik Einführung Was ist die Kinematik? Die Kinematik beschäftigt
Intelligente Roboter lectures/2007ws/vorlesung/ir
 18.424 Intelligente Roboter 18.424 Intelligente Roboter http://tams-www.informatik.uni-hamburg.de/ lectures/2007ws/vorlesung/ir Jianwei Zhang Universität Hamburg Fakultät für Mathematik, Informatik und
18.424 Intelligente Roboter 18.424 Intelligente Roboter http://tams-www.informatik.uni-hamburg.de/ lectures/2007ws/vorlesung/ir Jianwei Zhang Universität Hamburg Fakultät für Mathematik, Informatik und
Nachbau von einem automatischen Theater
 Robotik Mira Geschichte Antike: Musikmaschinen und automatische Theater von Heron von Alexandria, fliegende Taube von Archytas von Tarent 1205: Al-Dschazarī: Autor vom Buch des Wissens von sinnreichen
Robotik Mira Geschichte Antike: Musikmaschinen und automatische Theater von Heron von Alexandria, fliegende Taube von Archytas von Tarent 1205: Al-Dschazarī: Autor vom Buch des Wissens von sinnreichen
Einführung in die Robotik Wegplanung. Mohamed Oubbati Institut für Neuroinformatik. Tel.: (+49) 731 /
 731 /") Einführung in die Rbtik Wegplanung Mhamed Oubbati Institut für Neurinfrmatik Tel.: (+49) 731 / 50 24153 mhamed.ubbati@uni-ulm.de 15. 01. 2013 Dr. Oubbati, Einführung in die Rbtik (Neurinfrmatik, Uni-Ulm)
Einführung in die Rbtik Wegplanung Mhamed Oubbati Institut für Neurinfrmatik Tel.: (+49) 731 / 50 24153 mhamed.ubbati@uni-ulm.de 15. 01. 2013 Dr. Oubbati, Einführung in die Rbtik (Neurinfrmatik, Uni-Ulm)
Grundlagen der Signalverarbeitung und Robotik
 64-544 Grundlagen der Signalverarbeitung und Robotik 64-544 Grundlagen der Signalverarbeitung und Robotik http://tams.informatik.uni-hamburg.de/ lectures/2013ss/vorlesung/gdsr Jianwei Zhang, Bernd Schütz
64-544 Grundlagen der Signalverarbeitung und Robotik 64-544 Grundlagen der Signalverarbeitung und Robotik http://tams.informatik.uni-hamburg.de/ lectures/2013ss/vorlesung/gdsr Jianwei Zhang, Bernd Schütz
Exercise (Part II) Anastasia Mochalova, Lehrstuhl für ABWL und Wirtschaftsinformatik, Kath. Universität Eichstätt-Ingolstadt 1
 Anastasia Mochalova, Lehrstuhl für ABWL und Wirtschaftsinformatik, Kath. Universität Eichstätt-Ingolstadt 1") Exercise (Part II) Notes: The exercise is based on Microsoft Dynamics CRM Online. For all screenshots: Copyright Microsoft Corporation. The sign ## is you personal number to be used in all exercises. All
Exercise (Part II) Notes: The exercise is based on Microsoft Dynamics CRM Online. For all screenshots: Copyright Microsoft Corporation. The sign ## is you personal number to be used in all exercises. All
DROHNENTECHNOLOGIE UND ANWENDUNGEN. Prof. Dr. Wolfram Hardt Dr. Ariane Heller, Dipl.-Inf. Stephan Blokzyl
 DROHNENTECHNOLOGIE UND Prof. Dr. Wolfram Hardt ANWENDUNGEN Prof. Dr. Wolfram Hardt Dr. Ariane Heller, Dipl.-Inf. Stephan Blokzyl Today Mobility reaches 3 rd Dimension Quelle: COPTERview airdata UG Individuality
DROHNENTECHNOLOGIE UND Prof. Dr. Wolfram Hardt ANWENDUNGEN Prof. Dr. Wolfram Hardt Dr. Ariane Heller, Dipl.-Inf. Stephan Blokzyl Today Mobility reaches 3 rd Dimension Quelle: COPTERview airdata UG Individuality
Roboter verlassen die Produktionshallen
 Shaping the future Roboter verlassen die Produktionshallen Prof. Dr. Roland Siegwart www.asl.ethz.ch www.wysszurich.ch 18. Thurgauer Technologietage UNIMA AG, MATZINGEN, 23.03.2018 Roland Siegwart 19.03.2018
Shaping the future Roboter verlassen die Produktionshallen Prof. Dr. Roland Siegwart www.asl.ethz.ch www.wysszurich.ch 18. Thurgauer Technologietage UNIMA AG, MATZINGEN, 23.03.2018 Roland Siegwart 19.03.2018
Kybernetik. Vorlesung Juni Dr. Mohamed Oubbati Institut für Neuroinformatik SS 2008
 Kybernetik Vorlesung 7 10 Juni 2008 Dr. Mohamed Oubbati Institut für Neuroinformatik SS 2008 Heutiges Thema: Einführung in die Robotik Was ist ein Roboter? Ein Roboter ist ein technisches Gerät, das von
Kybernetik Vorlesung 7 10 Juni 2008 Dr. Mohamed Oubbati Institut für Neuroinformatik SS 2008 Heutiges Thema: Einführung in die Robotik Was ist ein Roboter? Ein Roboter ist ein technisches Gerät, das von
Bahnplanung am stationären Hindernis
 Bahnplanung am stationären Hindernis von Ilona Blanck 01. Dez 2008 im Rahmen der Seminar Ring Vorlesung des Masterstudiums Informatik der Fakultät Technik und Informatik der HAW Hamburg Übersicht 1. Motivation
Bahnplanung am stationären Hindernis von Ilona Blanck 01. Dez 2008 im Rahmen der Seminar Ring Vorlesung des Masterstudiums Informatik der Fakultät Technik und Informatik der HAW Hamburg Übersicht 1. Motivation
Autonome Mobile Systeme
 Autonome Mobile Systeme Teil II: Systemtheorie für Informatier Dr. Mohamed Oubbati Institut für Neuroinformati Universität Ulm SS 2007 Heutiges Thema: PID Implementierung und Überblic Zeitontinuierlicher
Autonome Mobile Systeme Teil II: Systemtheorie für Informatier Dr. Mohamed Oubbati Institut für Neuroinformati Universität Ulm SS 2007 Heutiges Thema: PID Implementierung und Überblic Zeitontinuierlicher
Magic Figures. We note that in the example magic square the numbers 1 9 are used. All three rows (columns) have equal sum, called the magic number.
 have equal sum, called the magic number.") Magic Figures Introduction: This lesson builds on ideas from Magic Squares. Students are introduced to a wider collection of Magic Figures and consider constraints on the Magic Number associated with such
Magic Figures Introduction: This lesson builds on ideas from Magic Squares. Students are introduced to a wider collection of Magic Figures and consider constraints on the Magic Number associated with such
Connecting the dots on Germany s Energiewende and its impact on European energy policy
 Connecting the dots on Germany s Energiewende and its impact on European energy policy Rebecca Bertram Heinrich Böll Foundation Heinrich-Böll-Stiftung Schumannstraße 8 Telefon 030.285 34-0 Die grüne politische
Connecting the dots on Germany s Energiewende and its impact on European energy policy Rebecca Bertram Heinrich Böll Foundation Heinrich-Böll-Stiftung Schumannstraße 8 Telefon 030.285 34-0 Die grüne politische
Einführung in die Robotik Regelung in der Robotik. Mohamed Oubbati Institut für Neuroinformatik. Tel.: (+49) 731 / 50 24153 mohamed.oubbati@uni-ulm.
 731 / 50 24153 mohamed.oubbati@uni-ulm.") Einführung in die Robotik Regelung in der Robotik Mohamed Oubbati Institut für Neuroinformatik Tel.: (+49) 731 / 50 24153 mohamed.oubbati@uni-ulm.de 11. 12. 2012 Standardprobleme der mobilen Robotik Standardprobleme
Einführung in die Robotik Regelung in der Robotik Mohamed Oubbati Institut für Neuroinformatik Tel.: (+49) 731 / 50 24153 mohamed.oubbati@uni-ulm.de 11. 12. 2012 Standardprobleme der mobilen Robotik Standardprobleme
Bewegungsplanung von mehrachsigen Gelenkrobotern
 Bewegungsplanung von mehrachsigen Gelenkrobotern 13.01.2010 Vortrag zur Veranstaltung Anwendungen 1 Übersicht Einleitung Steuerungsarten Bahnplanungsalgorithmen Forschungsprojekte Ausblick 2 Motivation
Bewegungsplanung von mehrachsigen Gelenkrobotern 13.01.2010 Vortrag zur Veranstaltung Anwendungen 1 Übersicht Einleitung Steuerungsarten Bahnplanungsalgorithmen Forschungsprojekte Ausblick 2 Motivation
Grundlagen der Signalverarbeitung und Robotik
 64-544 Grundlagen der Signalverarbeitung und Robotik 64-544 Grundlagen der Signalverarbeitung und Robotik http://tams.informatik.uni-hamburg.de/ lectures/2011ss/vorlesung/gdsr Jianwei Zhang Universität
64-544 Grundlagen der Signalverarbeitung und Robotik 64-544 Grundlagen der Signalverarbeitung und Robotik http://tams.informatik.uni-hamburg.de/ lectures/2011ss/vorlesung/gdsr Jianwei Zhang Universität
«Roboter verlassen die Produktionshallen»
 Shaping the future «Roboter verlassen die Produktionshallen» Prof. Dr. Roland Siegwart www.asl.ethz.ch www.wysszurich.ch Berufslandschaft der Zukunft Zurich, 26 April, 2017 Roland Siegwart 26.04.2017 1
Shaping the future «Roboter verlassen die Produktionshallen» Prof. Dr. Roland Siegwart www.asl.ethz.ch www.wysszurich.ch Berufslandschaft der Zukunft Zurich, 26 April, 2017 Roland Siegwart 26.04.2017 1
Möglichkeiten der Verhaltenssteuerung
 Möglichkeiten der Verhaltenssteuerung Reaktive Robotik-Systeme [1] Übersicht Einführung Zentrale Begriffe Problematik Historie Reaktive Architekturen Beispiele [2] Einführung Begriff Roboter seit 1921
Möglichkeiten der Verhaltenssteuerung Reaktive Robotik-Systeme [1] Übersicht Einführung Zentrale Begriffe Problematik Historie Reaktive Architekturen Beispiele [2] Einführung Begriff Roboter seit 1921
Rolland. Niels Schütte Hristo Gurdzhanov. 1 Vorstellung 2 Gliederung 3 Forschung 4 Rolland 1 5 Rolland 2. 6 Obstacle Map 7 Rolland 3 8 Projekte
 Rolland Niels Schütte Gliederung Forschung Rolland 1 Rolland 2 ObstacleMap Rolland 3 Projekte Probleme Finanzierung Forschung Navigation/Raumkognition Sichere Systeme Rolland 1 Kamera Jede Menge Sensoren
Rolland Niels Schütte Gliederung Forschung Rolland 1 Rolland 2 ObstacleMap Rolland 3 Projekte Probleme Finanzierung Forschung Navigation/Raumkognition Sichere Systeme Rolland 1 Kamera Jede Menge Sensoren
Autonomes Fahren Technologien und Chancen
 Shaping the future Autonomes Fahren Technologien und Chancen Roland Siegwart, ETH Zurich www.asl.ethz.ch www.wysszurich.ch ETH, Januar 31, 2017 Roland Siegwart 31.01.2017 1 Mobilität der Puls unserer Gesellschaft
Shaping the future Autonomes Fahren Technologien und Chancen Roland Siegwart, ETH Zurich www.asl.ethz.ch www.wysszurich.ch ETH, Januar 31, 2017 Roland Siegwart 31.01.2017 1 Mobilität der Puls unserer Gesellschaft
Steuerungsarchitekturen für Stand-Alone-Robotersysteme
 tand-alone-systeme eminar Robotik W 04/05 Torsten Ehli nhalt 1. Allgemeine Anforderungen an 2. Klassische Zerlegung 3. Ansatz von Brooks: Ebenenentwicklung 4. Beschreibung der Ebenen 5. Weiterentwicklungen
tand-alone-systeme eminar Robotik W 04/05 Torsten Ehli nhalt 1. Allgemeine Anforderungen an 2. Klassische Zerlegung 3. Ansatz von Brooks: Ebenenentwicklung 4. Beschreibung der Ebenen 5. Weiterentwicklungen
VIRGINIA CODE 159. Interkulturelle und landeskundliche Aspekte. Schreibmaterial
 VIRGINIA Fertigkeit Hören Relevante(r) Deskriptor(en) Deskriptor 1: Kann Gesprächen über vertraute Themen die Hauptpunkte entnehmen, wenn Standardsprache verwendet und auch deutlich gesprochen wird. (B1)
VIRGINIA Fertigkeit Hören Relevante(r) Deskriptor(en) Deskriptor 1: Kann Gesprächen über vertraute Themen die Hauptpunkte entnehmen, wenn Standardsprache verwendet und auch deutlich gesprochen wird. (B1)
Support Technologies based on Bi-Modal Network Analysis. H. Ulrich Hoppe. Virtuelles Arbeiten und Lernen in projektartigen Netzwerken
 Support Technologies based on Bi-Modal Network Analysis H. Agenda 1. Network analysis short introduction 2. Supporting the development of virtual organizations 3. Supporting the development of compentences
Support Technologies based on Bi-Modal Network Analysis H. Agenda 1. Network analysis short introduction 2. Supporting the development of virtual organizations 3. Supporting the development of compentences
There are 10 weeks this summer vacation the weeks beginning: June 23, June 30, July 7, July 14, July 21, Jul 28, Aug 4, Aug 11, Aug 18, Aug 25
 Name: AP Deutsch Sommerpaket 2014 The AP German exam is designed to test your language proficiency your ability to use the German language to speak, listen, read and write. All the grammar concepts and
Name: AP Deutsch Sommerpaket 2014 The AP German exam is designed to test your language proficiency your ability to use the German language to speak, listen, read and write. All the grammar concepts and
Cycling and (or?) Trams
 Trams") Cycling and (or?) Trams Can we support both? Experiences from Berne, Switzerland Roland Pfeiffer, Departement for cycling traffic, City of Bern Seite 1 A few words about Bern Seite 2 A few words about
Cycling and (or?) Trams Can we support both? Experiences from Berne, Switzerland Roland Pfeiffer, Departement for cycling traffic, City of Bern Seite 1 A few words about Bern Seite 2 A few words about
FACHKUNDE FüR KAUFLEUTE IM GESUNDHEITSWESEN FROM THIEME GEORG VERLAG
 FACHKUNDE FüR KAUFLEUTE IM GESUNDHEITSWESEN FROM THIEME GEORG VERLAG DOWNLOAD EBOOK : FACHKUNDE FüR KAUFLEUTE IM GESUNDHEITSWESEN Click link bellow and free register to download ebook: FACHKUNDE FüR KAUFLEUTE
FACHKUNDE FüR KAUFLEUTE IM GESUNDHEITSWESEN FROM THIEME GEORG VERLAG DOWNLOAD EBOOK : FACHKUNDE FüR KAUFLEUTE IM GESUNDHEITSWESEN Click link bellow and free register to download ebook: FACHKUNDE FüR KAUFLEUTE
Mercedes OM 636: Handbuch und Ersatzteilkatalog (German Edition)
") Mercedes OM 636: Handbuch und Ersatzteilkatalog (German Edition) Mercedes-Benz Click here if your download doesn"t start automatically Mercedes OM 636: Handbuch und Ersatzteilkatalog (German Edition) Mercedes-Benz
Mercedes OM 636: Handbuch und Ersatzteilkatalog (German Edition) Mercedes-Benz Click here if your download doesn"t start automatically Mercedes OM 636: Handbuch und Ersatzteilkatalog (German Edition) Mercedes-Benz
Elementary Intensive Reading I German UN1113 Fall 2017
 Section Elementary Intensive Reading I German UN1113 Fall 2017 Instructor Day/Time Location UN1113-Section 001 Ross Shields MW 10:11-2:25pm TBA Hamilton Hall Elementary German I. Course Objectives: The
Section Elementary Intensive Reading I German UN1113 Fall 2017 Instructor Day/Time Location UN1113-Section 001 Ross Shields MW 10:11-2:25pm TBA Hamilton Hall Elementary German I. Course Objectives: The
Vorlesung Einführung in die Technologie mobiler Roboter. Einführung in die Technologie mobiler Roboter SS Prof. Dr.-Ing.
 Einführung in die Technologie mobiler Roboter SS 2005 Prof. Dr.-Ing. Karsten Hartmann Literatur Jens Altenburg, Uwe Altenburg: Mobile Roboter, Carl Hanser Verlag München Wien, 1999. Joseph L. Johns, Anita.
Einführung in die Technologie mobiler Roboter SS 2005 Prof. Dr.-Ing. Karsten Hartmann Literatur Jens Altenburg, Uwe Altenburg: Mobile Roboter, Carl Hanser Verlag München Wien, 1999. Joseph L. Johns, Anita.
Einführung in die Artificial Intelligence
 Einführung in die Artificial Intelligence Institut für Computertechnik ICT Institute of Computer Technology Roland Lang mailto:langr@ict.tuwien.ac.at Definition: Was ist AI? ISO 4177: Artificial Intelligence
Einführung in die Artificial Intelligence Institut für Computertechnik ICT Institute of Computer Technology Roland Lang mailto:langr@ict.tuwien.ac.at Definition: Was ist AI? ISO 4177: Artificial Intelligence
Bosch Rexroth - The Drive & Control Company
 Bosch Rexroth - The Drive & Control Company Alle Rechte bei Bosch Rexroth AG, auch für den Fall von Schutzrechtsanmeldungen. Jede Verfügungsbefugnis, wie Kopier- und Weitergaberecht, bei uns. 1 Case study
Bosch Rexroth - The Drive & Control Company Alle Rechte bei Bosch Rexroth AG, auch für den Fall von Schutzrechtsanmeldungen. Jede Verfügungsbefugnis, wie Kopier- und Weitergaberecht, bei uns. 1 Case study
Accelerating Information Technology Innovation
 Accelerating Information Technology Innovation http://aiti.mit.edu Ghana Summer 2011 Lecture 05 Functions Weather forecast in Accra Thursday Friday Saturday Sunday 30 C 31 C 29 C 28 C f = 9 5 c + 32 Temperature
Accelerating Information Technology Innovation http://aiti.mit.edu Ghana Summer 2011 Lecture 05 Functions Weather forecast in Accra Thursday Friday Saturday Sunday 30 C 31 C 29 C 28 C f = 9 5 c + 32 Temperature
DIBELS TM. German Translations of Administration Directions
 DIBELS TM German Translations of Administration Directions Note: These translations can be used with students having limited English proficiency and who would be able to understand the DIBELS tasks better
DIBELS TM German Translations of Administration Directions Note: These translations can be used with students having limited English proficiency and who would be able to understand the DIBELS tasks better
Informatics Master Programs
 Informatics Master Programs T. Huckle Technichal University of Munich Department of Informatics Scientific Computing Garching, 8.6.2018 Overview Master Informatics Master Informatics: Games Engineering
Informatics Master Programs T. Huckle Technichal University of Munich Department of Informatics Scientific Computing Garching, 8.6.2018 Overview Master Informatics Master Informatics: Games Engineering
Non users after Cochlear Implantation in Single Sided Deafness
 Non users after Cochlear Implantation in Single Sided Deafness W. Pethe*, J. Langer*, S. Lissel**, K. Begall* *HNO-Klinik, AMEOS Klinikum Halberstadt **Cochlear Implant Rehabilitationszentrum Sachsen-Anhalt
Non users after Cochlear Implantation in Single Sided Deafness W. Pethe*, J. Langer*, S. Lissel**, K. Begall* *HNO-Klinik, AMEOS Klinikum Halberstadt **Cochlear Implant Rehabilitationszentrum Sachsen-Anhalt
Mitglied der Leibniz-Gemeinschaft
 Methods of research into dictionary use: online questionnaires Annette Klosa (Institut für Deutsche Sprache, Mannheim) 5. Arbeitstreffen Netzwerk Internetlexikografie, Leiden, 25./26. März 2013 Content
Methods of research into dictionary use: online questionnaires Annette Klosa (Institut für Deutsche Sprache, Mannheim) 5. Arbeitstreffen Netzwerk Internetlexikografie, Leiden, 25./26. März 2013 Content
Produktübersicht Gaszähler Product Overview Gas Meters.
 Produktübersicht Gaszähler Product Overview Gas Meters www.ritter.de/de www.ritter.de/en Hochpräzise Gaszähler High Precision Gas Meters»Als Leiter einer Forschungsabteilung sind Know-how und Präzision
Produktübersicht Gaszähler Product Overview Gas Meters www.ritter.de/de www.ritter.de/en Hochpräzise Gaszähler High Precision Gas Meters»Als Leiter einer Forschungsabteilung sind Know-how und Präzision
Killy Literaturlexikon: Autoren Und Werke Des Deutschsprachigen Kulturraumes 2., Vollstandig Uberarbeitete Auflage (German Edition)
") Killy Literaturlexikon: Autoren Und Werke Des Deutschsprachigen Kulturraumes 2., Vollstandig Uberarbeitete Auflage (German Edition) Walther Killy Click here if your download doesn"t start automatically
Killy Literaturlexikon: Autoren Und Werke Des Deutschsprachigen Kulturraumes 2., Vollstandig Uberarbeitete Auflage (German Edition) Walther Killy Click here if your download doesn"t start automatically
p^db=`oj===pìééçêíáåñçêã~íáçå=
 p^db=`oj===pìééçêíáåñçêã~íáçå= Error: "Could not connect to the SQL Server Instance" or "Failed to open a connection to the database." When you attempt to launch ACT! by Sage or ACT by Sage Premium for
p^db=`oj===pìééçêíáåñçêã~íáçå= Error: "Could not connect to the SQL Server Instance" or "Failed to open a connection to the database." When you attempt to launch ACT! by Sage or ACT by Sage Premium for
3 Programmierung von Robotern
 3 Programmierung von Robotern 3.1 Arten der Programmierung Arten Programmierung durch Beispiele Programmierung durch Training roboterorientierte Programmierung aufgabenorientierte Programmierung 3.1.1
3 Programmierung von Robotern 3.1 Arten der Programmierung Arten Programmierung durch Beispiele Programmierung durch Training roboterorientierte Programmierung aufgabenorientierte Programmierung 3.1.1
Geistes-, Natur-, Sozial- und Technikwissenschaften gemeinsam unter einem Dach. Programmes for refugees at Bielefeld University
 Programmes for refugees at Bielefeld University 1 Bielefeld University Funded in 1969 Middle-sized university with 28.000 students, 1800 of them international students, 13 faculties: main focus on Natural
Programmes for refugees at Bielefeld University 1 Bielefeld University Funded in 1969 Middle-sized university with 28.000 students, 1800 of them international students, 13 faculties: main focus on Natural
CB RADIO Service Manual AE 6890
 CB RADIO Service Manual AE 6890 Downloaded from www.cbradio.nl Technische Mitteilung zu AE 6890 Problem: Bei Montage einer schlecht geerdeten Antenne oder einer Antenne mit schlechtem SWR sehr nahe am
CB RADIO Service Manual AE 6890 Downloaded from www.cbradio.nl Technische Mitteilung zu AE 6890 Problem: Bei Montage einer schlecht geerdeten Antenne oder einer Antenne mit schlechtem SWR sehr nahe am
Newest Generation of the BS2 Corrosion/Warning and Measurement System
 Newest Generation of the BS2 Corrosion/Warning and Measurement System BS2 System Description: BS2 CorroDec 2G is a cable and energyless system module range for detecting corrosion, humidity and prevailing
Newest Generation of the BS2 Corrosion/Warning and Measurement System BS2 System Description: BS2 CorroDec 2G is a cable and energyless system module range for detecting corrosion, humidity and prevailing
Weather forecast in Accra
 Weather forecast in Accra Thursday Friday Saturday Sunday 30 C 31 C 29 C 28 C f = 9 5 c + 32 Temperature in Fahrenheit Temperature in Celsius 2 Converting Celsius to Fahrenheit f = 9 5 c + 32 tempc = 21
Weather forecast in Accra Thursday Friday Saturday Sunday 30 C 31 C 29 C 28 C f = 9 5 c + 32 Temperature in Fahrenheit Temperature in Celsius 2 Converting Celsius to Fahrenheit f = 9 5 c + 32 tempc = 21
Routing in WSN Exercise
 Routing in WSN Exercise Thomas Basmer telefon: 0335 5625 334 fax: 0335 5625 671 e-mail: basmer [ at ] ihp-microelectronics.com web: Outline Routing in general Distance Vector Routing Link State Routing
Routing in WSN Exercise Thomas Basmer telefon: 0335 5625 334 fax: 0335 5625 671 e-mail: basmer [ at ] ihp-microelectronics.com web: Outline Routing in general Distance Vector Routing Link State Routing
Die Bedeutung neurowissenschaftlicher Erkenntnisse für die Werbung (German Edition)
") Die Bedeutung neurowissenschaftlicher Erkenntnisse für die Werbung (German Edition) Lisa Johann Click here if your download doesn"t start automatically Download and Read Free Online Die Bedeutung neurowissenschaftlicher
Die Bedeutung neurowissenschaftlicher Erkenntnisse für die Werbung (German Edition) Lisa Johann Click here if your download doesn"t start automatically Download and Read Free Online Die Bedeutung neurowissenschaftlicher
Where are we now? The administration building M 3. Voransicht
 Let me show you around 9 von 26 Where are we now? The administration building M 3 12 von 26 Let me show you around Presenting your company 2 I M 5 Prepositions of place and movement There are many prepositions
Let me show you around 9 von 26 Where are we now? The administration building M 3 12 von 26 Let me show you around Presenting your company 2 I M 5 Prepositions of place and movement There are many prepositions
TRAVEL AND HOTEL INFORMATION
 15th Annual Meeting of the Biofeedback Foundation of Europe February 22-26, 2011, Munich, Germany TRAVEL AND HOTEL INFORMATION Conference location Hochschule München: Fakultät Elektrotechnik und Informationstechnik
15th Annual Meeting of the Biofeedback Foundation of Europe February 22-26, 2011, Munich, Germany TRAVEL AND HOTEL INFORMATION Conference location Hochschule München: Fakultät Elektrotechnik und Informationstechnik
Fachübersetzen - Ein Lehrbuch für Theorie und Praxis
 Fachübersetzen - Ein Lehrbuch für Theorie und Praxis Radegundis Stolze Click here if your download doesn"t start automatically Fachübersetzen - Ein Lehrbuch für Theorie und Praxis Radegundis Stolze Fachübersetzen
Fachübersetzen - Ein Lehrbuch für Theorie und Praxis Radegundis Stolze Click here if your download doesn"t start automatically Fachübersetzen - Ein Lehrbuch für Theorie und Praxis Radegundis Stolze Fachübersetzen
Wie man heute die Liebe fürs Leben findet
 Wie man heute die Liebe fürs Leben findet Sherrie Schneider Ellen Fein Click here if your download doesn"t start automatically Wie man heute die Liebe fürs Leben findet Sherrie Schneider Ellen Fein Wie
Wie man heute die Liebe fürs Leben findet Sherrie Schneider Ellen Fein Click here if your download doesn"t start automatically Wie man heute die Liebe fürs Leben findet Sherrie Schneider Ellen Fein Wie
Tube Analyzer LogViewer 2.3
 Tube Analyzer LogViewer 2.3 User Manual Stand: 25.9.2015 Seite 1 von 11 Name Company Date Designed by WKS 28.02.2013 1 st Checker 2 nd Checker Version history Version Author Changes Date 1.0 Created 19.06.2015
Tube Analyzer LogViewer 2.3 User Manual Stand: 25.9.2015 Seite 1 von 11 Name Company Date Designed by WKS 28.02.2013 1 st Checker 2 nd Checker Version history Version Author Changes Date 1.0 Created 19.06.2015
Englisch-Grundwortschatz
 Englisch-Grundwortschatz Die 100 am häufigsten verwendeten Wörter also auch so so in in even sogar on an / bei / in like wie / mögen their with but first only and time find you get more its those because
Englisch-Grundwortschatz Die 100 am häufigsten verwendeten Wörter also auch so so in in even sogar on an / bei / in like wie / mögen their with but first only and time find you get more its those because
Diktat: Der Weg zur Arbeit
 Diktat: Der Weg zur Arbeit Learning Unit: Locations and getting around Reading & Writing Level A2 www.lingoda.com 1 Diktat: Der Weg zur Arbeit Leitfaden/Outline Inhalt/Content Es gibt viele Möglichkeiten
Diktat: Der Weg zur Arbeit Learning Unit: Locations and getting around Reading & Writing Level A2 www.lingoda.com 1 Diktat: Der Weg zur Arbeit Leitfaden/Outline Inhalt/Content Es gibt viele Möglichkeiten
Harry gefangen in der Zeit Begleitmaterialien
 Episode 015 - A very strange date Focus: how to express the exact date, the year and the names of the months Grammar: ordinal numbers, expressing dates, the pronoun es It's the 31 st of April, but April
Episode 015 - A very strange date Focus: how to express the exact date, the year and the names of the months Grammar: ordinal numbers, expressing dates, the pronoun es It's the 31 st of April, but April
Die Intrige: Historischer Roman (German Edition)
") Die Intrige: Historischer Roman (German Edition) Ehrenfried Kluckert Click here if your download doesn"t start automatically Die Intrige: Historischer Roman (German Edition) Ehrenfried Kluckert Die Intrige:
Die Intrige: Historischer Roman (German Edition) Ehrenfried Kluckert Click here if your download doesn"t start automatically Die Intrige: Historischer Roman (German Edition) Ehrenfried Kluckert Die Intrige:
Geschäftsprozesse und Regeln
 Geschäftsprozesse und Regeln 7 Szenarien einer möglichen Integration Jana Koehler Hochschule Luzern Lucerne University of Applied Sciences and Arts jana.koehler@hslu.ch Gartner: Organizations struggle
Geschäftsprozesse und Regeln 7 Szenarien einer möglichen Integration Jana Koehler Hochschule Luzern Lucerne University of Applied Sciences and Arts jana.koehler@hslu.ch Gartner: Organizations struggle
Contract Based Design
 Contract Based Design The Problem + = How can we avoid this in complex software and systems? How do we describe what we want? Requirement or Specification: REQ-1: The two traffic lights must not be green
Contract Based Design The Problem + = How can we avoid this in complex software and systems? How do we describe what we want? Requirement or Specification: REQ-1: The two traffic lights must not be green
Mein Haus energetisch sanieren: Komfort verbessern, Kosten senken, Klima schützen (German Edition)
") Mein Haus energetisch sanieren: Komfort verbessern, Kosten senken, Klima schützen (German Edition) Der Schweizerische Beobachter, Reto Westermann, Üsé Meyer Click here if your download doesn"t start automatically
Mein Haus energetisch sanieren: Komfort verbessern, Kosten senken, Klima schützen (German Edition) Der Schweizerische Beobachter, Reto Westermann, Üsé Meyer Click here if your download doesn"t start automatically
Geschichte. Automatische Theater und Musik. Leonardo da Vinci zeichnete Androiden. von Heron von Alexandria. Beeinflusst von Al-Dschazari
 Was ist Robotik? Robotertechnik Besteht aus: Physik, Informatik & Kinetik Bereiche: Elektronik und Maschinenbau Ziel: Zusammenarbeit zwischen Elektronik und Mechanik Beweggrund: Arbeit zu erleichtern oder
Was ist Robotik? Robotertechnik Besteht aus: Physik, Informatik & Kinetik Bereiche: Elektronik und Maschinenbau Ziel: Zusammenarbeit zwischen Elektronik und Mechanik Beweggrund: Arbeit zu erleichtern oder
How to get Veränderung: Krisen meistern, Ängste loslassen, das Leben lieben! (German Edition)
") How to get Veränderung: Krisen meistern, Ängste loslassen, das Leben lieben! (German Edition) Click here if your download doesn"t start automatically How to get Veränderung: Krisen meistern, Ängste loslassen,
How to get Veränderung: Krisen meistern, Ängste loslassen, das Leben lieben! (German Edition) Click here if your download doesn"t start automatically How to get Veränderung: Krisen meistern, Ängste loslassen,
Fakultät III Univ.-Prof. Dr. Jan Franke-Viebach
 1 Universität Siegen Fakultät III Univ.-Prof. Dr. Jan Franke-Viebach Klausur Monetäre Außenwirtschaftstheorie und politik / International Macro Wintersemester 2011-12 (2. Prüfungstermin) Bearbeitungszeit:
1 Universität Siegen Fakultät III Univ.-Prof. Dr. Jan Franke-Viebach Klausur Monetäre Außenwirtschaftstheorie und politik / International Macro Wintersemester 2011-12 (2. Prüfungstermin) Bearbeitungszeit:
Im Zeichen der Sonne: Schamanische Heilrituale (German Edition)
") Im Zeichen der Sonne: Schamanische Heilrituale (German Edition) Click here if your download doesn"t start automatically Im Zeichen der Sonne: Schamanische Heilrituale (German Edition) Im Zeichen der Sonne:
Im Zeichen der Sonne: Schamanische Heilrituale (German Edition) Click here if your download doesn"t start automatically Im Zeichen der Sonne: Schamanische Heilrituale (German Edition) Im Zeichen der Sonne:
LIO der persönliche Betreuungsassistent
 8. ALS Tag - «ALS Betreuung und Begleitung» LIO der persönliche Betreuungsassistent Michael Früh Stv. Geschäftsführer, CFO Zürich-Regensdorf, 9. November 2018 Übersicht 1. Einleitung und Vorstellung 2.
8. ALS Tag - «ALS Betreuung und Begleitung» LIO der persönliche Betreuungsassistent Michael Früh Stv. Geschäftsführer, CFO Zürich-Regensdorf, 9. November 2018 Übersicht 1. Einleitung und Vorstellung 2.
Soziale Arbeit mit rechten Jugendcliquen: Grundlagen zur Konzeptentwicklung (German Edition)
") Soziale Arbeit mit rechten Jugendcliquen: Grundlagen zur Konzeptentwicklung (German Edition) Click here if your download doesn"t start automatically Soziale Arbeit mit rechten Jugendcliquen: Grundlagen
Soziale Arbeit mit rechten Jugendcliquen: Grundlagen zur Konzeptentwicklung (German Edition) Click here if your download doesn"t start automatically Soziale Arbeit mit rechten Jugendcliquen: Grundlagen
Mock Exam Behavioral Finance
 Mock Exam Behavioral Finance For the following 4 questions you have 60 minutes. You may receive up to 60 points, i.e. on average you should spend about 1 minute per point. Please note: You may use a pocket
Mock Exam Behavioral Finance For the following 4 questions you have 60 minutes. You may receive up to 60 points, i.e. on average you should spend about 1 minute per point. Please note: You may use a pocket
EXPOSÉ. Mercedes-Benz 220 Cabriolet A ID 1293
 EXPOSÉ Mercedes-Benz 220 Cabriolet A ID 1293 BECHTEL MOTOR COMPANY GMBH GESCHÄFTSFÜHRER / MANAGING DIRECTOR TIM BECHTEL CONTENT PICTURES TECHNICAL DATA HISTORY RESTORATION DOCUMENTATION BECHTEL MOTOR COMPANY
EXPOSÉ Mercedes-Benz 220 Cabriolet A ID 1293 BECHTEL MOTOR COMPANY GMBH GESCHÄFTSFÜHRER / MANAGING DIRECTOR TIM BECHTEL CONTENT PICTURES TECHNICAL DATA HISTORY RESTORATION DOCUMENTATION BECHTEL MOTOR COMPANY
Handbuch der therapeutischen Seelsorge: Die Seelsorge-Praxis / Gesprächsführung in der Seelsorge (German Edition)
") Handbuch der therapeutischen Seelsorge: Die Seelsorge-Praxis / Gesprächsführung in der Seelsorge (German Edition) Reinhold Ruthe Click here if your download doesn"t start automatically Handbuch der therapeutischen
Handbuch der therapeutischen Seelsorge: Die Seelsorge-Praxis / Gesprächsführung in der Seelsorge (German Edition) Reinhold Ruthe Click here if your download doesn"t start automatically Handbuch der therapeutischen
Berlin Speakers Pool. convention.visitberlin.com. Top-Redner aus Berlin Top speakers from Berlin
 Berlin Speakers Pool convention.visitberlin.com Anne Kjær Riechert, Foto: TEDxBerlin 2016 / Sebastian Gabsch Top-Redner aus Berlin Top speakers from Berlin Kongresse, Tagungen, Events in Berlin Gute Redner
Berlin Speakers Pool convention.visitberlin.com Anne Kjær Riechert, Foto: TEDxBerlin 2016 / Sebastian Gabsch Top-Redner aus Berlin Top speakers from Berlin Kongresse, Tagungen, Events in Berlin Gute Redner
Die kreative Manufaktur - Naturseifen zum Verschenken: Pflegende Seifen selbst herstellen (German Edition)
") Die kreative Manufaktur - Naturseifen zum Verschenken: Pflegende Seifen selbst herstellen (German Edition) Gesine Harth, Jinaika Jakuszeit Click here if your download doesn"t start automatically Die kreative
Die kreative Manufaktur - Naturseifen zum Verschenken: Pflegende Seifen selbst herstellen (German Edition) Gesine Harth, Jinaika Jakuszeit Click here if your download doesn"t start automatically Die kreative
European Qualification Strategies in Information and Communications Technology (ICT)
") European Qualification Strategies in Information and Communications Technology (ICT) Towards a European (reference) ICT Skills and Qualification Framework Results and Recommendations from the Leornardo-da-Vinci-II
European Qualification Strategies in Information and Communications Technology (ICT) Towards a European (reference) ICT Skills and Qualification Framework Results and Recommendations from the Leornardo-da-Vinci-II
CALCULATING KPI QUANTITY-INDEPENDENT ROUTE TIME
 CALCULATING KPI QUANTITY-INDEPENDENT ROUTE TIME Wenn Sie diesen Text lesen können, müssen Sie die Folie im Post-Menü mit der Funktion «Folie einfügen» erneut einfügen. Sonst kann die Fläche nicht eingefärbt
CALCULATING KPI QUANTITY-INDEPENDENT ROUTE TIME Wenn Sie diesen Text lesen können, müssen Sie die Folie im Post-Menü mit der Funktion «Folie einfügen» erneut einfügen. Sonst kann die Fläche nicht eingefärbt
Smart Specialisation. Practical Example: Creative Industries Network Baden-Wuerttemberg
 Smart Specialisation Practical Example: Creative Industries Network Baden-Wuerttemberg Ulrich Winchenbach MFG Innovation Agency for ICT and Media of the State of Baden-Wuerttemberg Stuttgart, 24. Mai 2012
Smart Specialisation Practical Example: Creative Industries Network Baden-Wuerttemberg Ulrich Winchenbach MFG Innovation Agency for ICT and Media of the State of Baden-Wuerttemberg Stuttgart, 24. Mai 2012
Modul 2 Robotik (Teil 2)
") RWTH Aachen Lehr- und Forschungsgebiet Informatik 9 Learning Technologies & Didaktik der Informatik Modul 2 Robotik (Teil 2) Nadine Bergner, Stefan Moritz Überblick Rückblick & Anknüpfung Einführung Modul
RWTH Aachen Lehr- und Forschungsgebiet Informatik 9 Learning Technologies & Didaktik der Informatik Modul 2 Robotik (Teil 2) Nadine Bergner, Stefan Moritz Überblick Rückblick & Anknüpfung Einführung Modul
H o c h s c h u l e D e g g e n d o r f H o c h s c h u l e f ü r a n g e w a n d t e W i s s e n s c h a f t e n
 Time Aware Shaper Christian Boiger christian.boiger@hdu-deggendorf.de IEEE 802 Plenary September 2012 Santa Cruz, California D E G G E N D O R F U N I V E R S I T Y O F A P P L I E D S C I E N C E S Time
Time Aware Shaper Christian Boiger christian.boiger@hdu-deggendorf.de IEEE 802 Plenary September 2012 Santa Cruz, California D E G G E N D O R F U N I V E R S I T Y O F A P P L I E D S C I E N C E S Time
EXPOSÉ. Mercedes-Benz 220 Cabriolet A ID 1246
 EXPOSÉ Mercedes-Benz 220 Cabriolet A ID 1246 BECHTEL MOTORCOMPANY GMBH GESCHÄFTSFÜHRER / MANAGING DIRECTOR TIM BECHTEL CONTENT PICTURES TECHNICAL DATA HISTORY RESTORATION DOCUMENTATION BECHTEL MOTORCOMPANY
EXPOSÉ Mercedes-Benz 220 Cabriolet A ID 1246 BECHTEL MOTORCOMPANY GMBH GESCHÄFTSFÜHRER / MANAGING DIRECTOR TIM BECHTEL CONTENT PICTURES TECHNICAL DATA HISTORY RESTORATION DOCUMENTATION BECHTEL MOTORCOMPANY
Exercise (Part I) Anastasia Mochalova, Lehrstuhl für ABWL und Wirtschaftsinformatik, Kath. Universität Eichstätt-Ingolstadt 1
 Anastasia Mochalova, Lehrstuhl für ABWL und Wirtschaftsinformatik, Kath. Universität Eichstätt-Ingolstadt 1") Exercise (Part I) Notes: The exercise is based on Microsoft Dynamics CRM Online. For all screenshots: Copyright Microsoft Corporation. The sign ## is you personal number to be used in all exercises. All
Exercise (Part I) Notes: The exercise is based on Microsoft Dynamics CRM Online. For all screenshots: Copyright Microsoft Corporation. The sign ## is you personal number to be used in all exercises. All
Was heißt Denken?: Vorlesung Wintersemester 1951/52. [Was bedeutet das alles?] (Reclams Universal-Bibliothek) (German Edition)
![Was heißt Denken?: Vorlesung Wintersemester 1951/52. [Was bedeutet das alles?] (Reclams Universal-Bibliothek) (German Edition)](/thumbs/68/59244907.jpg "Was heißt Denken?: Vorlesung Wintersemester 1951/52. [Was bedeutet das alles?] (Reclams Universal-Bibliothek) (German Edition)") Was heißt Denken?: Vorlesung Wintersemester 1951/52. [Was bedeutet das alles?] (Reclams Universal-Bibliothek) (German Edition) Martin Heidegger Click here if your download doesn"t start automatically Was
Was heißt Denken?: Vorlesung Wintersemester 1951/52. [Was bedeutet das alles?] (Reclams Universal-Bibliothek) (German Edition) Martin Heidegger Click here if your download doesn"t start automatically Was
Orientierungsarbeit Englisch
 Sächsisches Staatsministerium Geltungsbereich: Klassenstufe 6 für Kultus Mittelschule / Förderschule Schuljahr 2007/2008 Orientierungsarbeit Englisch Mittelschule Klassenstufe 6 Material für Schüler Allgemeine
Sächsisches Staatsministerium Geltungsbereich: Klassenstufe 6 für Kultus Mittelschule / Förderschule Schuljahr 2007/2008 Orientierungsarbeit Englisch Mittelschule Klassenstufe 6 Material für Schüler Allgemeine
Psychologie der Informationsverarbeitung Bachelor- und Master-Thesen
 Psychologie der Informationsverarbeitung Bachelor- und Master-Thesen Wintersemester 2016/17 Prof. C. Rothkopf, PhD 08.12.2016 Fachbereich 03 Institut für Psychologie Psychologie der Informationsverarbeitung
Psychologie der Informationsverarbeitung Bachelor- und Master-Thesen Wintersemester 2016/17 Prof. C. Rothkopf, PhD 08.12.2016 Fachbereich 03 Institut für Psychologie Psychologie der Informationsverarbeitung
Mobility trends in the Baltic Sea Region
 Mobility trends in the Baltic Sea Region Conference on promoting strategic and innovative mobility for students and researchers 23 November 2010 in Copenhagen by Dr. Birger Hendriks Outline Forms of mobility
Mobility trends in the Baltic Sea Region Conference on promoting strategic and innovative mobility for students and researchers 23 November 2010 in Copenhagen by Dr. Birger Hendriks Outline Forms of mobility
Hindernisumfahrung eines autonomen Roboters in einer unbekannten statischen Umgebung. Ronny Menzel
 Hindernisumfahrung eines autonomen Roboters in einer unbekannten statischen Umgebung. Ronny Menzel Inhalt Aufgabenstellung Begriffserklärung Hindernisumfahrungsstrategien Anforderungen an die Hindernisumfahrung
Hindernisumfahrung eines autonomen Roboters in einer unbekannten statischen Umgebung. Ronny Menzel Inhalt Aufgabenstellung Begriffserklärung Hindernisumfahrungsstrategien Anforderungen an die Hindernisumfahrung
Im Fluss der Zeit: Gedanken beim Älterwerden (HERDER spektrum) (German Edition)
 (German Edition)") Im Fluss der Zeit: Gedanken beim Älterwerden (HERDER spektrum) (German Edition) Ulrich Schaffer Click here if your download doesn"t start automatically Im Fluss der Zeit: Gedanken beim Älterwerden (HERDER
Im Fluss der Zeit: Gedanken beim Älterwerden (HERDER spektrum) (German Edition) Ulrich Schaffer Click here if your download doesn"t start automatically Im Fluss der Zeit: Gedanken beim Älterwerden (HERDER
Komplexität beherrschen mit Contract Based Design
 Komplexität beherrschen mit Contract Based Design Thomas Schütz / PROTOS GmbH P4You-Thementag 5.5.2017 - Bamberg The Problem + = How can we avoid this in complex software and systems? How do we describe
Komplexität beherrschen mit Contract Based Design Thomas Schütz / PROTOS GmbH P4You-Thementag 5.5.2017 - Bamberg The Problem + = How can we avoid this in complex software and systems? How do we describe
Informatik für Mathematiker und Physiker Woche 2. David Sommer
 Informatik für Mathematiker und Physiker Woche 2 David Sommer David Sommer 25. September 2018 1 Heute: 1. Self-Assessment 2. Feedback C++ Tutorial 3. Modulo Operator 4. Exercise: Last Three Digits 5. Binary
Informatik für Mathematiker und Physiker Woche 2 David Sommer David Sommer 25. September 2018 1 Heute: 1. Self-Assessment 2. Feedback C++ Tutorial 3. Modulo Operator 4. Exercise: Last Three Digits 5. Binary
Duell auf offener Straße: Wenn sich Hunde an der Leine aggressiv verhalten (Cadmos Hundebuch) (German Edition)
 (German Edition)") Duell auf offener Straße: Wenn sich Hunde an der Leine aggressiv verhalten (Cadmos Hundebuch) (German Edition) Nadine Matthews Click here if your download doesn"t start automatically Duell auf offener
Duell auf offener Straße: Wenn sich Hunde an der Leine aggressiv verhalten (Cadmos Hundebuch) (German Edition) Nadine Matthews Click here if your download doesn"t start automatically Duell auf offener
Sport Northern Ireland. Talent Workshop Thursday 28th January 2010 Holiday Inn Express, Antrim
 Sport Northern Ireland Talent Workshop Thursday 28th January 2010 Holiday Inn Express, Antrim Outcomes By the end of the day participants will be able to: Define and differentiate between the terms ability,
Sport Northern Ireland Talent Workshop Thursday 28th January 2010 Holiday Inn Express, Antrim Outcomes By the end of the day participants will be able to: Define and differentiate between the terms ability,
Listening Comprehension: Talking about language learning
 Talking about language learning Two Swiss teenagers, Ralf and Bettina, are both studying English at a language school in Bristo and are talking about language learning. Remember that Swiss German is quite
Talking about language learning Two Swiss teenagers, Ralf and Bettina, are both studying English at a language school in Bristo and are talking about language learning. Remember that Swiss German is quite
Thomas Mosenthin. Click here if your download doesn"t start automatically
 Ich male meine Welt - i paint my world - Teil 2: Male Sehenswürdigkeiten der Städte: Tokyo, Cancun, Saint Petersburg, Montreal, Berlin, San Francisco,... Phuket, Prague (Volume 2) (German Edition) Click
Ich male meine Welt - i paint my world - Teil 2: Male Sehenswürdigkeiten der Städte: Tokyo, Cancun, Saint Petersburg, Montreal, Berlin, San Francisco,... Phuket, Prague (Volume 2) (German Edition) Click