TEPZZ 944_7_A_T EP A1 (19) (11) EP A1 (12) EUROPÄISCHE PATENTANMELDUNG. (51) Int Cl.: A01B 69/00 ( ) A01B 79/00 (2006.
|
|
|
- Nadja Nora Hartmann
- vor 8 Jahren
- Abrufe
Transkript
1 (19) TEPZZ 944_7_A_T (11) EP A1 (12) EUROPÄISCHE PATENTANMELDUNG (43) Veröffentlichungstag: Patentblatt 1/47 (1) Int Cl.: A01B 69/00 (06.01) A01B 79/00 (06.01) (21) Anmeldenummer: 1.9 (22) Anmeldetag: (84) Benannte Vertragsstaaten: AL AT BE BG CH CY CZ DE DK EE ES FI FR GB GR HR HU IE IS IT LI LT LU LV MC MK MT NL NO PL PT RO RS SE SI SK SM TR Benannte Erstreckungsstaaten: BA ME Benannte Validierungsstaaten: MA (71) Anmelder: Amazonen-Werke H. Dreyer GmbH & Co. KG 49 Hasbergen (DE) (72) Erfinder: Die Erfinder haben auf ihre Nennung verzichtet. () Priorität: DE (4) LANDWIRTSCHAFTLICHE ARBEITSMASCHINE (7) Landwirtschaftliche Arbeitsmaschine umfassend ein Zugfahrzeug, ein Arbeitsgerät, eine Sensoreinrichtung zum Erfassen von wenigstens 2D-Informationen und eine Steuereinrichtung, die mit der Sensoreinrichtung und dem Arbeitsgerät verbunden ist und geeignet ist, wenigstens eine Funktion des Arbeitsgeräts in Abhängigkeit der von der Sensoreinrichtung erfassten Information zu steuern, dadurch gekennzeichnet, dass die Sensoreinrichtung so angeordnet ist, dass sie 2D-Informationen eines vor der Arbeitsmaschine liegenden Geländes erfassen kann und ein entsprechendes Verfahren zum Steuern eines Arbeitsgerät einer landwirtschaftlichen Arbeitsmaschine. EP A1 Printed by Jouve, 7001 PARIS (FR)
 Anmelder: Amazonen-Werke H. Dreyer GmbH & Co. KG 49 Hasbergen (DE) (72) Erfinder: Die Erfinder haben auf ihre Nennung verzichtet. () Priorität: 14.0.")
2 1 EP A1 2 Beschreibung [0001] Die Erfindung betrifft eine landwirtschaftliche Arbeitsmaschine nach dem Oberbegriff des Anspruchs 1 und ein Verfahren zum Steuern eines Arbeitsgeräts einer landwirtschaftlichen Arbeitsmaschine gemäß dem Oberbegriff des Anspruchs 13. [0002] Gattungsgemäße landwirtschaftliche Arbeitsmaschinen sind aus dem Stand der Technik bekannt. So zeigt beispielsweise die EP A1 eine landwirtschaftliche Arbeitsmaschine mit einem Arbeitsgerät, wobei an dem Arbeitsgerät eine Sensoreinheit, insbesondere eine Ultraschallsensoreinheit, angeordnet ist, die die Abstandsmessung gegenüber dem unter dem Arbeitsgerät befindlichen Boden übernimmt und anhand des gemessenen Abstands einen Bearbeitungsabstand berechnet, demgemäß das Arbeitsgerät, beispielsweise der Düngemittelspritzer, betrieben wird. [0003] Die bekannten landwirtschaftlichen Arbeitsmaschinen und vorgesehenen Sensoren ermöglichen jedoch eine Anpassung der Arbeitshöhe oder anderen Betriebsparametern der landwirtschaftlichen Arbeitsmaschine nur in sehr begrenztem Umfang, da die zwischen Messung und notwendiger Schaltung zur Verfügung stehende Zeit sehr kurz ist. [0004] Es ist daher Aufgabe der vorliegenden Erfindung, eine landwirtschaftliche Arbeitsmaschine und ein Verfahren zum Betrieb einer solchen bereitzustellen, das effektiver auf Änderungen in der Umgebung des Arbeitsgeräts reagieren kann. [000] Diese Aufgabe wird erfindungsgemäß durch die landwirtschaftliche Arbeitsmaschine nach unabhängigem Anspruch 1 und das Verfahren zum Steuern eines Arbeitsgeräts einer landwirtschaftlichen Arbeitsmaschine nach Anspruch 13 gelöst. Vorteilhafte Weiterbildungen der Erfindung sind in den Unteransprüchen erfasst. [0006] Die erfindungsgemäße landwirtschaftliche Arbeitsmaschine ist dadurch gekennzeichnet, dass die Sensoreinrichtung so angeordnet ist, dass sie die wenigstens zweidimensionalen Informationen eines vor der Arbeitsmaschine liegenden Geländes erfassen kann. Dadurch kann bereits in einem gewissen zeitlichen Rahmen vor dem eigentlichen Eintreffen der landwirtschaftlichen Arbeitsmaschine und des Arbeitsgeräts an dem zu bearbeitenden Bereich des Feldes zweidimensionale Informationen über diesen Bereich gesammelt und mit Hilfe der Steuereinrichtung die Steuerung des Arbeitsgeräts vorbereitet bzw. durchgeführt werden. Das Arbeitsgerät kann so deutlich genauer an die Gegebenheiten des vor der Arbeitsmaschine liegenden Geländes angepasst werden, wodurch die Produktivität erhöht werden kann. Unter dem vor der Arbeitsmaschine gelegenen Gelände ist in diesem Zusammenhang nicht nur der Boden des Feldes zu verstehen, sondern auch sämtlicher Bewuchs auf dem Feld. Ebenso zählt dazu nicht nur die Oberfläche des Bodens sondern auch tiefer gelegene Bodenschichten. Das Erfassen von 2D-Informationen bezieht sich auf Informationen des Geländes, die in einer Ebene senkrecht zur Fahrtrichtung des Fahrzeuges erfasst werden. Diese Ebene kann in Fahrtrichtung eine gewisse Ausdehnung besitzen, die beispielsweise über das Blickfeld der Sensoreinrichtung bestimmt wird. Obwohl sich dadurch ein dreidimensionaler Ausschnitt des Geländes ergibt, soll dies unter dem Begriff der (im Wesentlichen) zweidimensionalen Information zusammengefasst werden. [0007] In einer Ausführungsform ist die Sensoreinrichtung ausgebildet, um Informationen des vor der Arbeitsmaschine liegenden Geländes kontinuierlich oder in bestimmten Zeitintervallen zu erfassen. Durch kontinuierliches Messen kann ein zweidimensionales Abbild der gesamten Umgebung erstellt werden und so eine lückenlose Steuerung des Arbeitsgeräts erreicht werden. Handelt es sich jedoch um eine zu erfassende Information, beispielsweise die Höhe des Feldbodens an bestimmten Stellen, so kann eine Messung in deutlich größeren Zeitabständen, beispielsweise 3 oder Sekunden genügen, um eine grobe Information über das Verhalten des Geländes zu erlangen. [0008] Weiterhin kann die Sensoreinrichtung ausgebildet sein, Informationen des vor der Arbeitsmaschine liegenden Geländes wenigstens über einen Bereich, der der Arbeitsbreite des Arbeitsgeräts entspricht, zu erfassen. Da für eine effektive Ausbringung von Material oder Bearbeitung eines Feldes nicht die Breite des eigentlichen Zugfahrzeugs sondern die Arbeitsbreite relevant ist, kann mit dieser Ausführungsform gewährleistet werden, dass eine Erfassung und damit einhergehende Auswertung von Informationen über die gesamte Arbeitsbreite des Arbeitsgeräts durchgeführt wird, um das Ergebnis zu optimieren. [0009] Es kann auch vorgesehen sein, dass die Sensoreinrichtung am Zugfahrzeug und/oder am Arbeitsgerät angeordnet ist. Die Anordnung am Zugfahrzeug erlaubt eine Erfassung des vor der Arbeitsmaschine liegenden Geländes sogar vor Erreichen des Zugfahrzeugs, wohingegen eine Anbringung der Sensoreinrichtung am Arbeitsgerät zwar eine nur verkürzte Reaktionszeit ermöglicht, jedoch Veränderungen in den Gegebenheiten des Geländes durch das Überfahren mit dem Zugfahrzeug berücksichtigt werden können. [00] In einer Weiterbildung ist die Arbeitsmaschine dadurch gekennzeichnet, dass die Sensoreinrichtung 3D-Informationen eines vor der Arbeitsmaschine liegenden Geländes erfassen kann. 3D-Informationen liefern eine noch detailliertere Grundlage für eine Berechnung und Steuerung des Arbeitsgeräts. Das Erfassen von 3D- Informationen umfasst dabei in jedem Fall auch die vorher beschriebenen zweidimensionalen Informationen des Geländes. [0011] Ferner kann die Arbeitsmaschine einen Geschwindigkeitssensor umfassen, der eine aktuelle Geschwindigkeit der Arbeitsmaschine messen und ein für die Geschwindigkeit indikatives Signal an die Steuereinheit übertragen kann, wobei die Steuereinheit die wenigstens eine Funktion des Arbeitsgeräts basierend einer 2

3 3 EP A1 4 Extrapolation der Geschwindigkeit der Arbeitsmaschine und einem so ermittelten Zeitpunkt, wann das Arbeitsgerät sich über einem von der Sensoreinrichtung vermessenen Bereich des Geländes befindet, zu steuern. Durch Verknüpfung der von dem Gelände erfassten Informationen und Bewegungsinformationen kann hier in vorteilhafter Weise vorausberechnet werden, wann eine Steuerung des Arbeitsgeräts erforderlich ist und so der optimale Zeitpunkt für beispielsweise eine Veränderung der Arbeitshöhe ermittelt werden. [0012] Die erfindungsgemäße Arbeitsmaschine kann als Feldspritze eingesetzt werden und ist dadurch gekennzeichnet, dass die Sensoreinrichtung ein optischer Sensor ist oder einen optischen Sensor umfasst, wobei die Sensoreinrichtung Bestandshöhen von auf dem vor der Arbeitsmaschine liegenden Gelände befindlichen Bestand messen kann und die Steuereinheit eine Arbeitshöhe des Arbeitsgeräts in Abhängigkeit der Bestandshöhe steuert. Mit dieser Ausführungsform werden die Vorteile der landwirtschaftlichen Arbeitsmaschine auf die Bestimmung der Arbeitshöhe des Arbeitsgeräts in Abhängigkeit der Bestandshöhe angewendet. [0013] In einer Weiterbildung dieser Ausführungsform ist vorgesehen, dass die Sensoreinrichtung eine Kamera ist, und die Steuereinheit aus der Bildinformation von durch die Kamera aufgenommenen Bilder eine Bestandshöhe bestimmen kann, oder dass die Sensoreinrichtung ein Laser ist, der eine Abstandsmessung zu vor der Arbeitsmaschine befindlichem Bestand durchführen kann, und die Steuereinheit aus der Abstandsmessung eine Bestandshöhe errechnen kann. Während Kameras nur eine relativ grobe Information liefern, die noch mit Bildverarbeitungsprogrammen bearbeitet werden muss, liefert der Laser deutlich genauere Informationen. Beide Ausführungsformen können je nach notwendiger Genauigkeit vorteilhaft benutzt werden. [0014] Vorteilhaft ist, wenn die Steuereinheit aus sämtlichen zu einem Zeitpunkt ermittelten Bestandshöhen eines bestimmten Bereichs des Geländes eine optimale Arbeitshöhe für das Arbeitsgerät errechnen kann. Da es im Sinne einer ökonomischen Bearbeitung des Feldes vorteilhaft sein kann, nicht immer die maximale oder minimale Arbeitshöhe, die anhand der Informationen möglich wäre, anzusteuern, kann mit Hilfe der optimalen Arbeitshöhe unter Berücksichtigung eventuell weiterer Betriebsparameter ein Gleichgewicht zwischen idealer Bearbeitung und ökonomischen Gesichtspunkten gefunden werden. [001] Alternativ kann die Arbeitsmaschine als Saatmaschine ausgebildet sein, wobei sie dadurch gekennzeichnet ist, dass die Sensoreinrichtung einen Mikrowellensensor und ein Bildaufnahmegerät umfasst, wobei der Mikrowellensensor die Bodenfeuchte ermitteln und das Bildaufnahmegerät die Bodenkontur bestimmen kann, wobei die Steuereinheit in Abhängigkeit der Bodenfeuchte und Bodenkontur eine geeignete Saattiefe bestimmen kann. Es werden so die Vorteile der beschriebenen landwirtschaftlichen Arbeitsmaschine für eine Saatmaschine genutzt. [0016] In einer Ausführungsform arbeitet der Mikrowellensensor nach dem Reflexionsverfahren und ermittelt kontinuierlich und berührungslos die Bodenfeuchte. [0017] Es kann vorgesehen sein, dass die Steuereinheit aus allen zu einem Zeitpunkt ermittelten Bodenfeuchten und Bodenkonturen eines bestimmten Bereichs des Geländes eine optimale Saattiefe bestimmen kann. Auch hier kann ein Gleichgewicht zwischen ökonomischen Gesichtspunkten und der optimalen Bearbeitung des Feldes gefunden werden, was die Produktivität erhöht. [0018] Das erfindungsgemäße Verfahren zum Steuern eines Arbeitsgeräts einer landwirtschaftlichen Arbeitsmaschine ist dadurch gekennzeichnet, dass wenigstens eine Funktion des Arbeitsgeräts in Abhängigkeit von 2D-Informationen über ein vor der Arbeitsmaschine liegendes Gelände gesteuert wird. Diese vorausschauende Erfassung von Informationen ermöglicht eine möglichst effektive Steuerung des Arbeitsgeräts. [0019] Das Verfahren kann beinhalten, dass Informationen des vor der Arbeitsmaschine liegenden Geländes kontinuierlich oder in bestimmten Zeitintervallen erfasst werden. So kann ein Gleichgewicht zwischen der benötigten Informationsmenge und dem ökonomischen Umgang mit gesammelten Daten erreicht werden. [00] In einer Weiterbildung sind die Zeitintervalle variabel und werden in Abhängigkeit von der Geschwindigkeit und/oder Beschleunigung der Arbeitsmaschine eingestellt. Werden Bewegungsdaten der landwirtschaftlichen Arbeitsmaschine berücksichtigt, um die Intervalle zur Informationsaufnahme bzw. -erfassung zu bestimmen, kann stets dieselbe Genauigkeit bei der Erfassung der Informationen sichergestellt werden. [0021] Weiterhin können Informationen über das vor der Arbeitsmaschine liegende Gelände wenigstens über die Arbeitsbreite des Arbeitsgeräts bestimmt werden. Dies erlaubt eine Berücksichtigung sämtlicher für die Bearbeitung des Feldes relevanter Informationen. [0022] In einer Ausführungsform werden 3D-Informationen eines vor der Arbeitsmaschine liegenden Geländes erfasst. Mittels dreidimensionalen Informationen kann das Arbeitsgerät genauer gesteuert werden. [0023] Es ist vorteilhaft, wenn die Funktion des Arbeitsgeräts in Abhängigkeit der Informationen über das Gelände zu einem Zeitpunkt gesteuert wird, der abhängig vom Zeitpunkt, zu dem die Informationen über das Gelände aufgenommen wurden, und abhängig von der momentanen Geschwindigkeit der Arbeitsmaschine ist. Somit kann vorausschauend eine genaue Steuerung des Arbeitsgeräts geplant werden. [0024] Das Verfahren kann genutzt werden, um mittels eines optischen Sensors Bestandshöhen von auf dem vor der Arbeitsmaschine liegenden Gelände befindlichen Bestand zu messen und die Arbeitshöhe des Arbeitsgeräts in Abhängigkeit der Bestandshöhen einzustellen. Das erfindungsgemäße Verfahren wird hier auf die Bestimmung der Arbeitshöhe in Abhängigkeit von Be- 3

4 EP A1 6 standshöhen in vorteilhafter Weise angewendet. [002] In einer Weiterbildung dieser Ausführungsform ist das Verfahren dadurch gekennzeichnet, dass basierend auf von einer Kamera aufgenommenen Bildinformationen des vor der Arbeitsmaschine befindlichen Bestands Bestandshöhen ermittelt werden oder dass eine Abstandsmessung zum Bestand auf dem vor der Arbeitsmaschine befindlichen Gelände durch einen Laser erfolgt und aus dem bestimmten Abstand eine Bestandshöhe ermittelt wird. [0026] Es kann vorgesehen sein, dass aus den zu einem Zeitpunkt ermittelten Bestandshöhen eines bestimmten Bereichs des Geländes eine optimale Bestandshöhe ermittelt und die Arbeitshöhe des Arbeitsgeräts entsprechend dieser optimalen Bestandshöhe eingestellt wird. So kann ein Gleichgewicht zwischen ökonomischen Gesichtspunkten und den ermittelten Bestandshöhen gefunden werden. [0027] Alternativ kann das Verfahren angewendet werden, um mittels eines Mikrowellensensors die Bodenfeuchte und mittels eines Bildaufnahmegeräts die Bodenkontur des vor der Arbeitsmaschine befindlichen Geländes zu bestimmen und in Abhängigkeit der Bodenfeuchte und Bodenkontur eine geeignete Saattiefe zu ermitteln. Das erfindungsgemäße Verfahren kann so auf das Säen von Samen angewandt werden. [0028] In einer Ausführungsform wird die Bodenfeuchte durch Reflexion kontinuierlich und berührungslos bestimmt. [0029] Weiterhin kann aus allen zu einem Zeitpunkt gemessenen Bodenfeuchten und Bodenkonturen eines bestimmten Bereichs des Geländes eine optimale Saattiefe bestimmt werden und das Arbeitsgerät in Abhängigkeit der optimalen Saattiefe gesteuert werden. Auch hier kann für das Aussäen die möglichst optimale Parametereinstellung in Abhängigkeit der aufgenommen Informationen und ökonomischen Gesichtspunkten gefunden werden. [00] Die Zeichnungen zeigen Fig. 1 Fig. 2 Fig. 3a-e Fig. 4a+b Fig. eine schematische Ansicht einer erfindungsgemäßen Landwirtschaftsmaschine. eine schematische Draufsicht auf eine erfindungsgemäße Landwirtschaftsmaschine auf einem Feld. eine schematische Darstellung der erfindungsgemäßen Vorrichtung gemäß zweier Ausführungsformen und eines Verfahrens. eine schematische Darstellung einer weiteren Ausführungsform des Verfahrens. eine schematische Darstellung einer weiteren Ausführungsform der erfindungsgemäßen landwirtschaftlichen Arbeitsmaschine [0031] Fig. 1 zeigt eine erfindungsgemäße landwirtschaftliche Arbeitsmaschine 0 in einer schematischen Darstellung auf einem Feld 1. Die landwirtschaftliche Arbeitsmaschine 0 umfasst dabei üblicherweise ein Zugfahrzeug 1 und ein Arbeitsgerät 2. Dabei müssen Zugfahrzeug und Arbeitsgerät nicht notwendigerweise als zwei separate Fahrzeuge ausgebildet sein sondern können auch in einem Fahrzeug zusammengefasst sein. Weiterhin kann das Arbeitsgerät von dem Zugfahrzeug 1 lösbar sein, so dass mit Hilfe ein und desselben Zugfahrzeugs unterschiedliche Arbeitsgeräte 2 verwendet werden können. Als Arbeitsgeräte kommen sämtliche bekannte Maschinen aus der Landwirtschaftstechnik in Frage, wie beispielsweise Feldspritze, Düngerverteiler, Kreiselegge, Sämaschine und so fort. [0032] Die Arbeitsmaschine 0 umfasst erfindungsgemäß eine Sensoreinrichtung 3, die derart an der landwirtschaftlichen Arbeitsmaschine 0 angebracht ist, dass sie wenigstens zweidimensionale Informationen über ein vor der Arbeitsmaschine 0 liegendes Gelände erfassen kann. Dieses Gelände kann beispielsweise der Abschnitt 4 des zu bearbeitenden Feldes 1 sein, der sich vor der landwirtschaftlichen Arbeitsmaschine befindet. Vorzugsweise ist die Sensoreinrichtung 3 so ausgebildet, dass sie während der Bewegung der Arbeitsmaschine 0 mit der Geschwindigkeit v über das zu bearbeitende Feld kontinuierlich oder in bestimmten zeitlichen Abständen wenigstens zweidimensionale Informationen über das Feld erfasst, so dass abschließend die entsprechende Information für das gesamte Feld zur Verfügung steht. [0033] In der dargestellten Ausführungsform ist die Sensoreinrichtung 3 aus zwei separaten Einrichtungen an den gegenüberliegenden Enden des Arbeitsgeräts 2 (hier beispielsweise eine Feldspritze) gebildet, wobei diese Einrichtungen in Fahrtrichtung ausgerichtet sind, sodass sie Informationen über das vor dem Arbeitsgerät 2 liegende Gelände 4 erfassen. [0034] Bei diesen Informationen kann es sich um, je nach verwendetem Arbeitsgerät, für die Bearbeitung des Feldes relevante Informationen, wie beispielsweise die Bestandshöhe von bereits auf dem Feld gewachsenen Pflanzen, die Dichte des Bestands, Qualität und Eigenschaften des Bodens, wie beispielsweise Bodenfeuchte oder Ähnliches handeln. Zu diesem Zweck kann die Sensoreinrichtung 3 auf unterschiedlichste Art und Weise ausgebildet sein. Sie kann beispielsweise eine Kamera umfassen oder einen Laser und eine entsprechende Empfangseinheit zum Erfassen der reflektierten Laserstrahlung von dem Bestand oder vom Boden. Weiterhin können andere Sensoren, wie Mikrowellensensoren, Schallsensoren oder Ähnliches zum Einsatz kommen. [003] Da jedes Arbeitsgerät gegebenenfalls unterschiedliche Anforderungen an die zu erfassenden Informationen stellt (Art der Information und Genauigkeit beispielsweise), ist es vorteilhaft, wenn die Sensoreinrichtung 3 direkt am Arbeitsgerät angeordnet ist. So kann bei Austausch des Arbeitsgeräts direkt die Sensorein- 4

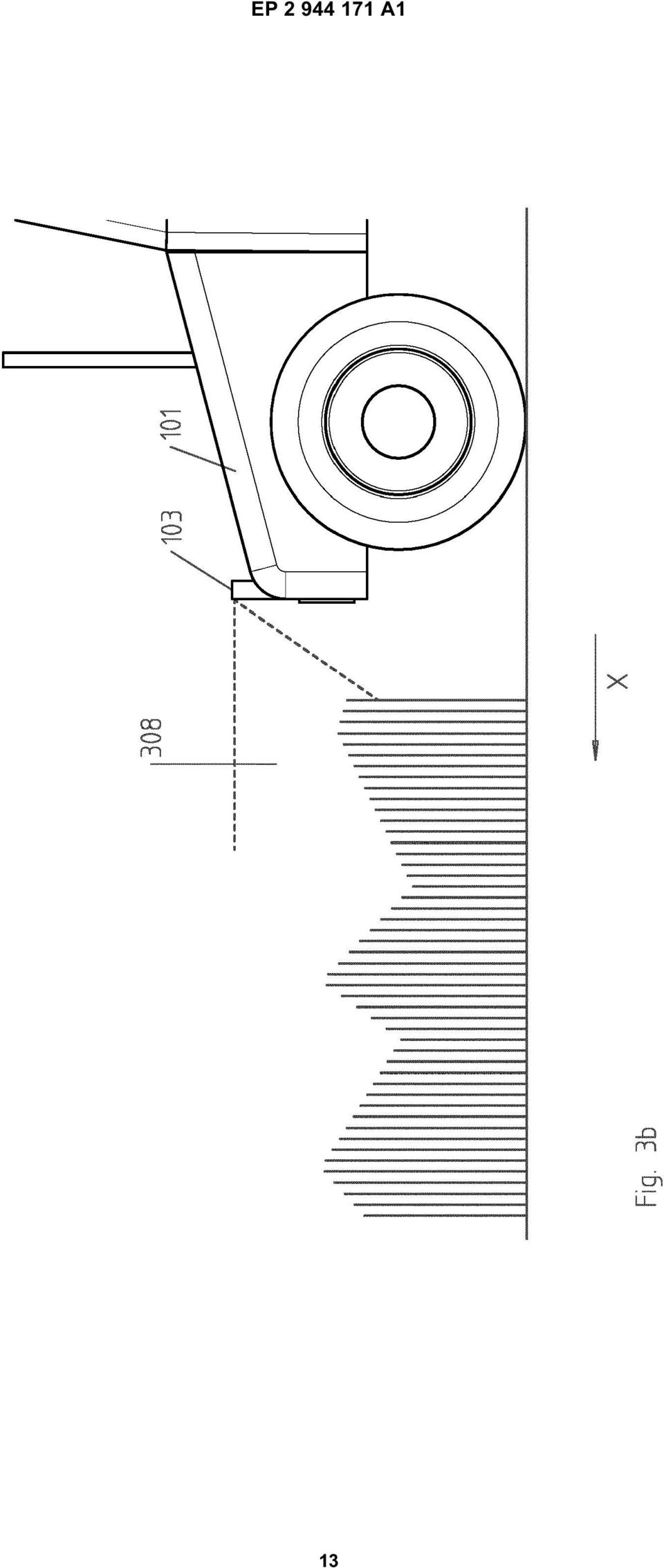
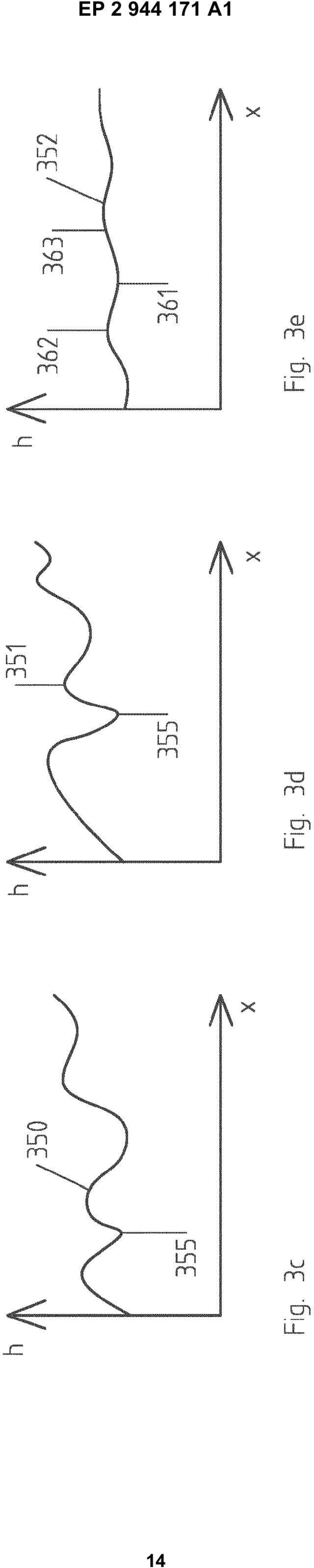
5 7 EP A1 8 richtung ausgetauscht werden. [0036] Es kann jedoch auch vorgesehen sein, dass die Sensoreinrichtung 3 an der Zugmaschine 1 angeordnet ist, um ein uneingeschränktes Blickfeld zu gewährleisten. Wenn die Zugmaschine 1 für unterschiedliche Arbeitsgeräte 2 verwendet wird, ist es in dieser Ausführungsform besonders vorteilhaft, wenn die Sensoreinrichtung 3 austauschbar ist, so dass je nach Arbeitsgerät eine entsprechende Sensoreinrichtung an der Arbeitsmaschine 0 angebracht werden kann, um die für die Funktion des Arbeitsgeräts notwendigen Informationen über das vor der Arbeitsmaschine 0 liegende Gelände zu erfassen. [0037] Erfindungsgemäß ist eine hier nicht dargestellte Steuereinrichtung in der Arbeitsmaschine 0, beispielsweise im Arbeitsgerät 2 selbst oder in der Zugmaschine 1 vorgesehen, die die von der Sensoreinrichtung 3 erfassten Informationen auswerten kann. Diese Auswertung kann auf unterschiedlichste Art und Weise erfolgen, hat jedoch als Ergebnis Parameter, die eine Steuerung der Funktion des Arbeitsgeräts erlauben. So kann die Steuereinrichtung beispielsweise aus den von der Sensoreinrichtung 3 aufgenommenen Bestandshöhen eine Arbeitshöhe für das Arbeitsgerät 2, wie beispielsweise einen Düngerstreuer, errechnen und entsprechend der errechneten Arbeitshöhe zu der jeweiligen Bestandshöhe die Arbeitshöhe des Arbeitsgeräts 2 einstellen. [0038] Fig. 2 zeigt eine erfindungsgemäße Arbeitsmaschine 0, wie sie beispielsweise auch in Fig. 1 dargestellt wird, auf einem Feld 0 in Draufsicht. Arbeitsgeräte 2 verfügen zumeist über eine bestimmte Arbeitsbreite b, beispielsweise 3 m, m, 6 m oder 12 m. Um die Funktionen des Arbeitsgeräts 2 möglichst effektiv über die gesamte Arbeitsbreite zu steuern, ist vorgesehen, dass die Sensoreinrichtung 3 die zweidimensionalen Informationen über das vor der Arbeitsmaschine 0 liegende Gelände 4 auf dem Feld 0 wenigstens auf einer Breite b, die der Arbeitsbreite b des Arbeitsgeräts 2 entspricht, erfasst. Das bedeutet, dass beispielsweise die Kamera einen so großen Blickwinkel haben sollte, dass sie in einer bestimmten Entfernung von der landwirtschaftlichen Arbeitsmaschine 0 (beispielsweise in m Entfernung oder in 1 m Entfernung) ein Gebiet mit einer Breite b, die der Arbeitsbreite des Arbeitsgeräts entspricht, erfassen kann und die entsprechenden Informationen aufnehmen kann. Bei Verwendung von einem Lasersensor ist der Lasersensor so eingestellt, dass er auch über die Arbeitsbreite b Informationen über das Gelände 4 erfassen kann. In Abhängigkeit der so erfassten Informationen kann dann die Funktion des Arbeitsgeräts 2 als Ganzes oder, sofern das Arbeitsgerät 2 aus einzeln ansteuerbaren Komponenten besteht, die Funktion der einzelnen Komponenten gesteuert werden. [0039] Da die Informationen der Sensoreinrichtung der beschriebenen Steuereinrichtung bereits vor Erreichen des entsprechenden Geländes zur Verfügung stehen, kann die Steuereinheit das Arbeitsgerät 2 rechtzeitig ansteuern, um sobald das Arbeitsgerät 2 das entsprechende Gelände 4 überfährt, beispielsweise die Arbeitshöhe oder die Saattiefe entsprechend den vorher aufgenommenen Informationen zu realisieren. [00] Um diesen Vorteil weiter auszunutzen, kann vorgesehen sein, dass die Arbeitsmaschine 0, wie es in Fig. 1 und 2 dargestellt ist, zusätzlich zu der Sensoreinrichtung 3 weitere Bewegungs- oder GPS-Sensoren umfasst, die Ort, Geschwindigkeit und vorzugsweise auch Beschleunigung der Arbeitsmaschine erfassen können. Unter Berücksichtigung dieser Daten und den aufgenommenen zweidimensionalen Informationen über das Gelände 4 kann die Steuereinheit dann zusätzlich berechnen oder extrapolieren, wann das Arbeitsgerät 2 voraussichtlich auf dem Gelände 4 ankommen wird und dementsprechend die Funktion des Arbeitsgeräts steuern. Da die Sensoreinrichtungen kontinuierlich oder zumindest in Zeitintervallen permanent Informationen von dem Gelände sammelt, wird der Steuereinrichtung somit genug Information zur Verfügung gestellt, um das Arbeitsgerät während des gesamten Betriebs über das Gelände kontinuierlich zu steuern. [0041] Dabei können auch Latenzzeiten Berücksichtigung finden. So erfordert es beispielsweise eine gewisse Zeit, um die Arbeitshöhe eines Arbeitsgeräts zu verändern. Stellt die Steuereinrichtung fest, dass aufgrund der zweidimensionalen Informationen über das vor der Arbeitsmaschine liegenden Geländes eine Anpassung der Arbeitshöhe des Arbeitsgeräts 2 zu einem bestimmten Zeitpunkt notwendig ist, so kann die Steuereinheit unter Berücksichtigung der momentanen Geschwindigkeit der Arbeitsmaschine 0 aber auch unter Berücksichtigung der für die Verstellung der Arbeitshöhe von der Ausgangshöhe auf die gewünschte Höhe bestimmen, wann das Steuersignal an das Arbeitsgerät 2 übertragen werden muss, um sicherzustellen, dass an dem vorgesehenen Ort die vorgesehene Arbeitshöhe erreicht wird. [0042] Fig. 3a zeigt dazu eine speziellere Ausführung der erfindungsgemäßen landwirtschaftlichen Arbeitsmaschine, wie sie beispielsweise in Fig. 1 und Fig. 2 dargestellt ist. Der Einfachheit halber ist zu diesem Zweck in Fig. 3a nur das Zugfahrzeug 1 teilweise dargestellt. Fig. 3a veranschaulicht das Erfassen einer Bestandshöhe h des vor der landwirtschaftlichen Arbeitsmaschine befindlichen Bestands auf einem Feld, also die Höhe der auf dem Feld gewachsenen Pflanze. In Fig. 3a ist die Sensoreinrichtung 3 als Laser ausgebildet, der kontinuierlich oder in kurzen aufeinanderfolgenden Abständen einen Laserstrahl 4 in einem vorbestimmten Winkel in Richtung des Feldes schickt. Entweder direkt in der Sensoreinrichtung 3 oder separat davon kann ein Detektor vorgesehen sein, der die reflektierte Laserstrahlung auffängt. Entweder direkt in dem Detektor bzw. der Sensoreinrichtung 3 oder in der Steuereinrichtung kann dann der Laufzeitunterschied bestimmt und daraus die Höhe und die Entfernung des Bestands ermittelt werden. Um die Genauigkeit der erfassten Informationen zu erhöhen, kann auch vorgesehen sein,

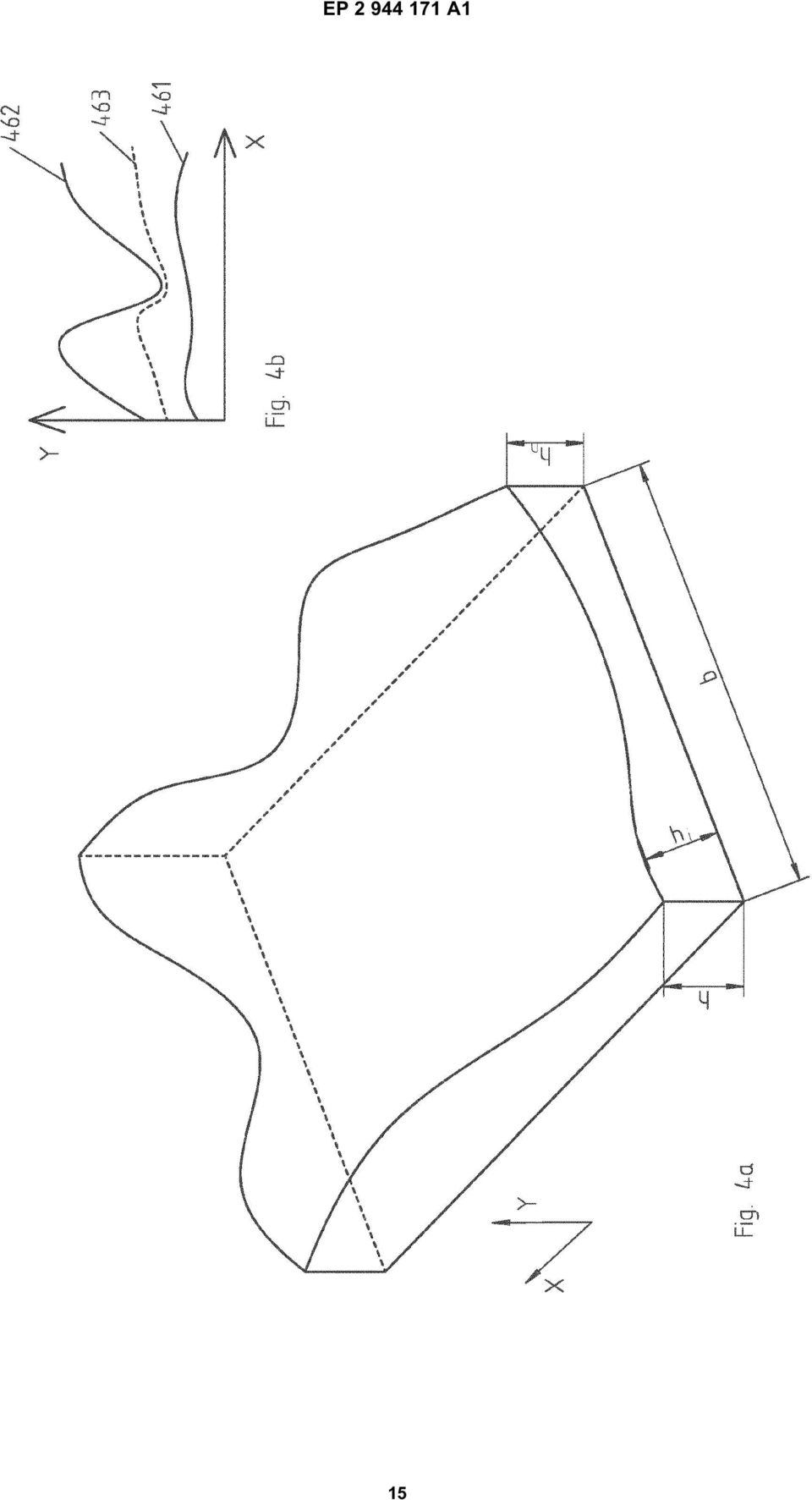
6 9 EP A1 dass der von der Sensoreinrichtung 3 emittierte Laserstrahl verschwenkbar ist, wie mit der dargestellten Pfeilrichtung angedeutet wird. So können in einem deutlich größeren Bereich des vor der Arbeitsmaschine befindlichen Geländes Informationen gesammelt werden. [0043] Fig. 3b zeigt eine andere Ausführungsform, bei der die Sensoreinrichtung 3 eine Kamera umfasst, die ein einem bestimmten Blickwinkel 8 beispielsweise mit einer Bildwiederholungsfrequenz von Bildern pro Sekunde oder Bildern pro Sekunde oder mehr das vor der Arbeitsmaschine befindliche Gelände filmt. Aus den so erfassten einzelnen Bildinformationen kann die Steuereinrichtung mittels bekannter Bildverarbeitungsprogramme eine Bestandshöhe des vor der Arbeitsmaschine befindlichen Bestands ermitteln. Aufgrund der bei Kameras üblicherweise festgelegten Bildwiederholungsrate erfolgt die Abstandsbestimmung hier in festgelegten Zeitintervallen. [0044] Es sei erwähnt, dass das Erfassen von Informationen jedoch auch in vorteilhafter Weise an die Geschwindigkeit der Arbeitsmaschine gekoppelt sein kann. Um beispielsweise eine stets konstante Erfassung von Informationen in Bezug auf den zurückgelegten Weg der Arbeitsmaschine zu gewährleisten, kann vorgesehen sein, dass die Frequenz, mit der die Informationen erfasst werden (bzw. das Zeitintervall zwischen zwei Erfassungszeitpunkten) in Abhängigkeit von der Geschwindigkeit der Arbeitsmaschine eingestellt wird. Bewegt sich die Arbeitsmaschine beispielsweise mit einer hohen Geschwindigkeit, so sollte das Erfassen von Informationen möglichst häufig pro Sekunde stattfinden, um sicherzustellen, dass die Informationen möglichst lückenlos sind. Bewegt sich die Arbeitsmaschine jedoch mit deutlich langsamerer Geschwindigkeit, so genügt eine weniger hohe Erfassungsfrequenz, so dass die Zeitintervalle zwischen den einzelnen Erfassungszeitpunkten größer sein können. So wird verhindert, dass zu viele redundante Informationen über ein und dasselbe Gebiet erfasst werden. [004] Ungeachtet dessen, ob die Informationen kontinuierlich erfasst werden, wie dies in Fig. 3c schematisch dargestellt ist, oder ob sie zu bestimmten Zeitintervallen erfasst werden, wie in Fig. 3d dargestellt, ermittelt die Steuereinrichtung oder ein entsprechend zugeordneter Mikroprozessor oder Computer eine bestimmte Eigenschaft des vor der Arbeitsmaschine befindlichen Geländes. Die hier gewählte Eigenschaft ist die Bestandshöhe h. Dazu wird jedem Ort x auf der in Fig. 3c dargestellten Kurve bzw. der in Fig. 3d dargestellten Kurve 31, eine Bestandshöhe h zugeordnet. In Fig. 3d erfolgt dies nicht für jeden Punkt x auf dem Gelände sondern entsprechend der Erfassungsfrequenz der Informationen (beispielsweise Bilder pro Sekunde bei Verwendung einer Kamera). Daraus ergibt sich auch in Abhängigkeit der Geschwindigkeit der Arbeitsmaschine eine Informationsdichte bzw. Punktdichte in der Kurve 31, die, sofern die Erfassungsfrequenz nicht mit der Geschwindigkeit verändert wird, durchaus schwanken kann. Während bei kontinuierlicher bzw. nahezu kontinuierlicher Informationserfassung, wie in Fig. 3c dargestellt, eine durchgängige Kurve für die Bestandshöhe angegeben werden kann, so erfordert die Informationserfassung in bestimmten zeitlichen Abständen, wie sie in Fig. 3d dargestellt ist, jedoch gegebenenfalls eine Interpolation zwischen den einzelnen Punkten. [0046] In einer Ausführungsform der Erfindung ist jedoch vorgesehen, dass aus den insgesamt gewonnenen Informationen und unter Berücksichtigung eventueller ökonomischer oder technischer Gesichtspunkte aus den Informationen der Sensoreinrichtung 3 von der Steuereinrichtung eine Steuerkurve für das Arbeitsgerät abgeleitet wird. Diese kann beispielsweise bei der Steuerung der Arbeitshöhe der Arbeitsmaschine in Abhängigkeit von der Bestandshöhe umfassen, dass die Steuereinrichtung aus den aufgenommen Informationen eine effektive bzw. optimale Arbeitshöhe für das Arbeitsgerät ermittelt, wie diese in Fig. 3e dargestellt ist. Diese optimale Arbeitshöhe kann von der Steuereinrichtung beispielsweise so geregelt werden, dass zu große Amplituden bei der Einstellung der Arbeitshöhe des Arbeitsgeräts vermieden werden und dementsprechend die dargestellten Extreme 3 in den Fig. 3c und 3d hier nur durch ein leichtes Absenken der Arbeitshöhe in Fig. 3e im Bereich 361 berücksichtigt werden. So kann zum einen sichergestellt werden, dass zwar die unterschiedlichen Eigenschaften des vor der Arbeitsmaschine befindlichen Geländes beispielsweise mit Hinblick auf die Bestandshöhe Berücksichtigung finden, jedoch ein Gleichgewicht zwischen den erfassten Daten und anderen Randbedingungen, wie beispielsweise den technischen Charakteristika des Arbeitsgeräts eingehalten wird. [0047] In Fig. 4 ist eine weitere Ausführungsform zur Bestimmung der optimalen Arbeitshöhe dargestellt. Dazu wird die Information über die gesamte Arbeitsbreite b der Arbeitsmaschine bzw. des Arbeitsgeräts von der Sensoreinrichtung aufgenommen, wie dies bereits mit Bezug auf Fig. 2 beschrieben wurde. Dazu werden, wie in Fig. 4a dargestellt, über die Arbeitsbreite b unterschiedliche Höhen h 1 über h i bis h n bestimmt. Aus diesen kann eine minimale Höhe und eine maximale Höhe über den gesamten Bereich ermittelt werden. Über die Entfernung x sind die minimalen Höhen 461 und die maximalen Höhen 462 des Bestands in Fig. 4b dargestellt. Nun kann mit Hilfe der Steuereinrichtung bzw. eines entsprechend zugeordneten Computers oder Mikroprozessors, die optimale Arbeitshöhe 463 ermittelt werden, die im Normalfall zwischen der minimalen Höhe und der maximalen Höhe des Bestands liegt. Dabei kann so vorgegangen werden, dass über alle Höhen h 1 bis h n an einem bestimmten Punkt x gemittelt wird und der entsprechende Mittelwert als Arbeitshöhe festgelegt wird. Hier kann jedoch auch eine Gewichtung erfolgen. Diese Gewichtung kann beispielsweise berücksichtigen, wie oft bestimmte Höhen, die deutlich über dem errechneten Mittelwert oder deutlich unter dem errechneten Mittelwert liegen, gemessen wurden. Diese können dann beispielsweise 6

7 11 EP A weniger Gewicht bei der Errechnung der optimalen Arbeitshöhe eingeräumt werden. So können Bestandshöhen, die um bis zu % vom Mittelwert abweichen, in die Berechnung beispielsweise mit einer Gewichtung von 0, eingehen. Noch weiter vom Mittelwert abweichende Höhen könnten nur noch mit 0,1 in die Berechnung eingehen. Extreme, und damit sehr seltene Abweichungen vom Mittelwert, werden so herausgerechnet. [0048] Obwohl die Berechnung hier als über die gesamte Arbeitsbreite b durchgeführt dargestellt ist, ist es natürlich, wie oben beschrieben auch möglich, dass für Arbeitsgeräte, die über separat ansteuerbare Segmente verfügen, eine Erfassung von zweidimensionalen Informationen gesondert für jedes Segment von der Steuereinheit betrachtet wird. Dies bedeutet, dass obwohl die Sensoreinrichtung beispielsweise die Gesamtmenge an Informationen über das vor der Arbeitsmaschine liegende Gelände auf der Arbeitsbreite b erfasst, die Steuereinheit die gesammelten Informationen entsprechend den Segmenten des Arbeitsgeräts unterteilt und beispielsweise analog zu den oben beschriebenen Verfahren die Funktionen der einzelnen Segmente des Arbeitsgeräts separat ansteuert. [0049] In den Fig. 3 und 4 wurde insbesondere auf die Bestandshöhe Bezug genommen, die von der Sensoreinrichtung gemessen und von der Steuereinrichtung verarbeitet wird, um eine optimale Arbeitshöhe für das Arbeitsgerät zu errechnen. Wie jedoch weiter oben beschrieben, können grundsätzlich sämtliche erfassten Informationen genutzt werden, um irgendwelche Funktionen des Arbeitsgeräts der landwirtschaftlichen Arbeitsmaschine in Abhängigkeit dieser Informationen zu steuern. [000] Dazu zeigt Fig. die Anwendung der erfindungsgemäßen Vorrichtung und des erfindungsgemäßen Verfahrens auf eine Sämaschine 00. Diese Sämaschine umfasst wie üblich ein Zugfahrzeug 1 und ein entsprechendes Arbeitsgerät 02, das Saatgut aussäen kann. Üblicherweise wird dazu das Saatgut über die entsprechenden Einbettungswerkzeuge in die Säscharen eingebracht, wobei dies in einer bestimmten Tiefe im Boden geschieht. In der Realität ist es so, dass die Saat am besten gedeiht, wenn bestimmte Bedingungen hinsichtlich der Bodenfeuchte und der Glutengröße bzw. der grundsätzlichen Struktur des Bodens erfüllt sind. Auch dies kann mit der erfindungsgemäßen landwirtschaftlichen Arbeitsmaschine 00 berücksichtigt werden. [001] Dazu umfasst die landwirtschaftliche Arbeitsmaschine 00 als Sensoreinrichtung 03 ein System aus einem Mikrowellensensor 0 und einer Kamera. Diese können, wie hier dargestellt, am Zugfahrzeug 1 nach unten gerichtet angeordnet sein, sie können aber auch, wie bereits in den vorherigen Figuren beschrieben, an der Vorderseite oder auf dem Dach des Zugfahrzeugs 1 angeordnet sein. Der Mikrowellensensor misst dabei kontinuierlich oder in kurzen Zeitabständen die Bodenfeuchte des vor der Arbeitsmaschine 00 befindlichen Geländes. Dazu kann beispielsweise ein Reflexionsverfahren genutzt werden, das eine Messung der Bodenfeuchte kontinuierlich und berührungslos ermöglicht. Die Kamera bzw. das Bildaufnahmegerät 04 hingegen erfasst die Bodenkontur des Geländes. Es stehen dann also sowohl Angaben zur Bodenfeuchte als auch zur Bodenkontur des vor der Arbeitsmaschine 00 befindlichen Geländes zur Verfügung. Diese können beispielsweise entsprechend Fig. 3 oder 4 genutzt werden, um eine Saattiefe zu berechnen. Dabei kann analog wie in Fig. 4b vorgegangen werden, so dass eine optimale Saattiefe über die gesamte Arbeitsbreite berechnet wird bzw. wenn die einzelnen Einbettungswerkzeuge separat ansteuerbar sind, für jedes Einbettungswerkzeug eine geeignete Saattiefe bestimmt wird. Analog zur Fig. 3 oder Fig. 4b kann die Saattiefe natürlich über die Arbeitsbreite des Arbeitsgeräts 02 aber auch in Bewegungsrichtung der Arbeitsmaschine 00 variieren. [002] Grundsätzlich kann bei der Bestimmung der Saattiefe bzw. der optimalen Saattiefe so vorgegangen werden, dass die erfassten Daten des Mikrowellensensors 0 zunächst für sich ausgewertet werden und anhand dessen eine optimale Saattiefe in Abhängigkeit der Bodenfeuchte bestimmt wird. Parallel dazu oder in einem weiteren Schritt können die aufgenommenen Bilddaten der Kamera 04 genutzt werden, um anhand der Bodenkontur eine optimale Saattiefe zu bestimmen. In einem weiteren Schritt können die so ermittelten optimalen Saattiefen kombiniert und eine resultierende optimale Saattiefe t bestimmt werden. Auch hier kann beispielsweise den von der Kamera oder den von dem Mikrowellensensor aufgenommenen Informationen gegebenenfalls ein höheres Gewicht bei der Bestimmung der resultierenden optimalen Saattiefe eingeräumt werden, oder einige gemessene Werte weniger stark berücksichtigt werden. [003] Die beschriebene landwirtschaftliche Arbeitsmaschine aber auch das erfindungsgemäße Verfahren sind nicht nur auf die Anwendung von beispielsweise Feldspritzen (Änderung der Arbeitshöhe) oder Sämaschinen (Änderung der Saattiefe) anwendbar, sondern können grundsätzlich in allen landwirtschaftlichen Arbeitsmaschinen vorteilhaft genutzt werden, sofern die Funktionsweise des Arbeitsgeräts von den äußeren Bedingungen des Geländes bzw. des Bestands abhängen. Es sei auch erwähnt, dass es mit Hilfe der vorgesehenen Sensoreinrichtung natürlich nicht nur möglich ist, zweidimensionale Informationen (Bestandshöhe über die Arbeitsbreite) zu ermitteln sondern, wie dies beispielsweise in Fig. 4a gezeigt ist, auch dreidimensionale Informationen ermittelt werden können. Patentansprüche 1. Landwirtschaftliche Arbeitsmaschine (0) umfassend ein Zugfahrzeug (1), ein Arbeitsgerät (2), eine Sensoreinrichtung (3) zum Erfassen von wenigstens 2D-Informationen und eine Steuereinrich- 7

8 13 EP A1 14 tung, die mit der Sensoreinrichtung (3) und dem Arbeitsgerät (2) verbunden ist und geeignet ist, wenigstens eine Funktion des Arbeitsgeräts (2) in Abhängigkeit der von der Sensoreinrichtung (3) erfassten Information zu steuern, dadurch gekennzeichnet, dass die Sensoreinrichtung (3) so angeordnet ist, dass sie 2D-Informationen eines vor der Arbeitsmaschine (0) liegenden Geländes (4) erfassen kann. 2. Arbeitsmaschine nach Anspruch 1, dadurch gekennzeichnet, dass die Sensoreinrichtung (3) ausgebildet ist, Informationen des vor der Arbeitsmaschine (0) liegenden Geländes (4) kontinuierlich oder in bestimmten Zeitintervallen zu erfassen. 3. Arbeitsmaschine nach Anspruch 1 oder 2, dadurch gekennzeichnet, dass die Sensoreinrichtung (3) ausgebildet ist, Informationen des vor der Arbeitsmaschine (0) liegenden Geländes (4) wenigstens über einen Bereich, der der Arbeitsbreite (b) des Arbeitsgeräts (2) entspricht, zu erfassen. 4. Arbeitsmaschine nach einem der Ansprüche 1 bis 3, dadurch gekennzeichnet, dass die Sensoreinrichtung (3) am Zugfahrzeug (1) und/oder am Arbeitsgerät (2) angeordnet ist.. Arbeitsmaschine nach einem der Ansprüche 1 bis 4, dadurch gekennzeichnet, dass die Sensoreinrichtung (3) 3D-Informationen eines vor der Arbeitsmaschine (0) liegenden Geländes (4) erfassen kann. 6. Arbeitsmaschine nach einem der Ansprüche 1 bis, dadurch gekennzeichnet, dass die Arbeitsmaschine einen Geschwindigkeitssensor umfasst, der eine aktuelle Geschwindigkeit der Arbeitsmaschine messen und ein für die Geschwindigkeit indikatives Signal an die Steuereinheit übertragen kann, wobei die Steuereinheit die wenigstens eine Funktion des Arbeitsgeräts (2) basierend einer Extrapolation der Geschwindigkeit der Arbeitsmaschine und einem so ermittelten Zeitpunkt, wann das Arbeitsgerät sich über einem von der Sensoreinrichtung (3) vermessenen Bereich des Geländes (4) befindet, zu steuern. 7. Arbeitsmaschine nach einem der Ansprüche 1 bis 6, dadurch gekennzeichnet, dass die Sensoreinrichtung (3) ein optischer Sensor ist oder einen optischen Sensor umfasst, wobei die Sensoreinrichtung Bestandshöhen (h) von auf dem vor der Arbeitsmaschine liegenden Gelände befindlichen Bestand messen kann und die Steuereinheit eine Arbeitshöhe des Arbeitsgeräts (2) in Abhängigkeit der Bestandshöhe (h) steuert Arbeitsmaschine nach Anspruch 7, dadurch gekennzeichnet, dass die Sensoreinrichtung (3) eine Kamera ist, und die Steuereinheit aus der Bildinformation von durch die Kamera aufgenommenen Bilder eine Bestandshöhe (h) bestimmen kann, oder dass die Sensoreinrichtung (3) ein Laser ist, der eine Abstandsmessung zu vor der Arbeitsmaschine (3) befindlichem Bestand durchführen kann, und die Steuereinheit aus der Abstandsmessung eine Bestandshöhe (h) errechnen kann. 9. Arbeitsmaschine nach Anspruch 7 oder 8, dadurch gekennzeichnet, dass die Steuereinheit aus sämtlichen zu einem Zeitpunkt ermittelten Bestandshöhen (h1, hi, hn) eines bestimmten Bereichs des Geländes eine optimale Arbeitshöhe (463) für das Arbeitsgerät errechnen kann.. Arbeitsmaschine nach einem der Ansprüche 1 bis 6, dadurch gekennzeichnet, dass die Sensoreinrichtung einen Mikrowellensensor (0) und ein Bildaufnahmegerät (04) umfasst, wobei der Mikrowellensensor (0) die Bodenfeuchte ermitteln und das Bildaufnahmegerät (04) die Bodenkontur bestimmen kann, wobei die Steuereinheit in Abhängigkeit der Bodenfeuchte und Bodenkontur eine geeignete Saattiefe (t) bestimmen kann. 11. Arbeitsmaschine nach Anspruch, dadurch gekennzeichnet, dass der Mikrowellensensor (0) nach dem Reflexionsverfahren arbeitet und kontinuierlich und berührungslos die Bodenfeuchte ermitteln kann. 12. Arbeitsmaschine nach Anspruch oder 11, dadurch gekennzeichnet, dass die Steuereinheit aus allen zu einem Zeitpunkt ermittelten Bodenfeuchten und Bodenkonturen eines bestimmten Bereichs des Geländes eine optimale Saattiefe bestimmen kann. 13. Verfahren zum Steuern eines Arbeitsgeräts einer landwirtschaftlichen Arbeitsmaschine (0), dadurch gekennzeichnet, dass 2D-Informationen eines vor der Arbeitsmaschine (0) liegenden Geländes (4) erfasst werden und wenigstens eine Funktion des Arbeitsgeräts (2) in Abhängigkeit der 2D- Informationen gesteuert wird. 14. Verfahren nach Anspruch 13, dadurch gekennzeichnet, dass Informationen des vor der Arbeitsmaschine (0) liegenden Geländes (4) kontinuierlich oder in bestimmten Zeitintervallen erfasst werden. 1. Verfahren nach Anspruch 14, dadurch gekennzeichnet, dass die Zeitintervalle variabel sind und in Abhängigkeit von der Geschwindigkeit und/oder Beschleunigung der Arbeitsmaschine (0) einge- 8
 ausgebildet ist, Informationen des vor der Arbeitsmaschine (0) liegenden Geländes (4) kontinuierlich oder in")
9 1 EP A1 16 stellt werden. 16. Verfahren nach einem der Ansprüche 13 bis 1, dadurch gekennzeichnet, dass Informationen über das vor der Arbeitsmaschine (0) liegende Gelände (4) wenigstens über die Arbeitsbreite (b) des Arbeitsgeräts (2) bestimmt werden. 17. Verfahren nach einem der Ansprüche 13 bis 16, dadurch gekennzeichnet, dass 3D-Informationen eines vor der Arbeitsmaschine (0) liegenden Geländes (4) erfasst werden. 23. Verfahren nach Anspruch 22, dadurch gekennzeichnet, dass die Bodenfeuchte durch Reflexion kontinuierlich und berührungslos bestimmt wird. 24. Verfahren nach Anspruch 22 oder 23, dadurch gekennzeichnet, dass aus allen zu einem Zeitpunkt gemessenen Bodenfeuchten und Bodenkonturen eines bestimmten Bereiches des Geländes eine optimale Saattiefe bestimmt wird und das Arbeitsgerät in Abhängigkeit der optimalen Saattiefe gesteuert wird. 18. Verfahren nach einem der Ansprüche 13 bis 17, dadurch gekennzeichnet, dass die Funktion des Arbeitsgeräts (2) in Abhängigkeit der Informationen über das Gelände (4) zu einem Zeitpunkt gesteuert wird, der abhängig vom Zeitpunkt, zu dem die Informationen über das Gelände (4) aufgenommen wurden, und abhängig von der momentanen Geschwindigkeit der Arbeitsmaschine (0) ist Verfahren nach einem der Ansprüche 13 bis 18, dadurch gekennzeichnet, dass mittels eines optischen Sensors Bestandshöhen (h) von auf dem vor der Arbeitsmaschine liegenden Gelände (4) befindlichen Bestand gemessen werden und die Arbeitshöhe des Arbeitsgeräts (2) in Abhängigkeit der Bestandshöhen (h) eingestellt wird.. Verfahren nach Anspruch 19, dadurch gekennzeichnet, dass basierend auf von einer Kamera aufgenommenen Bildinformationen des vor der Arbeitsmaschine (0) befindlichen Bestands Bestandshöhen (h) ermittelt werden oder dass eine Abstandsmessung zum Bestand auf dem vor der Arbeitsmaschine befindlichen Gelände durch einen Laser erfolgt und aus dem bestimmten Abstand eine Bestandshöhe ermittelt wird. 21. Verfahren nach Anspruch 19 oder, dadurch gekennzeichnet, dass aus den zu einem Zeitpunkt ermittelten Bestandshöhen (h1, hi, hn) eines bestimmten Bereichs des Geländes (4) eine optimale Arbeitshöhe (463) ermittelt und die Arbeitshöhe des Arbeitsgerätes(2) entsprechend dieser optimalen Arbeitshöhe (463) eingestellt wird Verfahren nach einem der Ansprüche 13 bis 18, dadurch gekennzeichnet, dass mittels eines Mikrowellensensors (0) die Bodenfeuchte und mittels eines Bildaufnahmegeräts (04) die Bodenkontur des vor der Arbeitsmaschine befindlichen Geländes bestimmt und in Abhängigkeit der Bodenfeuchte und Bodenkontur eine geeignete Saattiefe (t) ermittelt wird. 0 9
 bestimmt werden. 17.")
10

11 11

12 12

13 13
14 14
15 1
16 16

17

18

19 IN DER BESCHREIBUNG AUFGEFÜHRTE DOKUMENTE Diese Liste der vom Anmelder aufgeführten Dokumente wurde ausschließlich zur Information des Lesers aufgenommen und ist nicht Bestandteil des europäischen Patentdokumentes. Sie wurde mit größter Sorgfalt zusammengestellt; das EPA übernimmt jedoch keinerlei Haftung für etwaige Fehler oder Auslassungen. In der Beschreibung aufgeführte Patentdokumente EP A1 [0002] 19

(51) Int Cl. 7 : G06K 7/00, G06K 13/08. (72) Erfinder: Baitz, Günter 13629 Berlin (DE) Kamin, Hartmut 10585 Berlin (DE)
 Int Cl. 7 : G06K 7/00, G06K 13/08. (72) Erfinder: Baitz, Günter 13629 Berlin (DE) Kamin, Hartmut 10585 Berlin (DE)") (19) Europäisches Patentamt European Patent Office Office européen des brevets *EP001347405A1* (11) EP 1 347 405 A1 (12) EUROPÄISCHE PATENTANMELDUNG (43) Veröffentlichungstag: 24.09.2003 Patentblatt 2003/39
(19) Europäisches Patentamt European Patent Office Office européen des brevets *EP001347405A1* (11) EP 1 347 405 A1 (12) EUROPÄISCHE PATENTANMELDUNG (43) Veröffentlichungstag: 24.09.2003 Patentblatt 2003/39
(51) Int Cl. 7 : G09F 21/12. (72) Erfinder: Schimanz, Gerhard
 Int Cl. 7 : G09F 21/12. (72) Erfinder: Schimanz, Gerhard") (19) Europäisches Patentamt European Patent Office Office européen des brevets *EP001411488A1* (11) EP 1 411 488 A1 (12) EUROPÄISCHE PATENTANMELDUNG (43) Veröffentlichungstag: 21.04.2004 Patentblatt 2004/17
(19) Europäisches Patentamt European Patent Office Office européen des brevets *EP001411488A1* (11) EP 1 411 488 A1 (12) EUROPÄISCHE PATENTANMELDUNG (43) Veröffentlichungstag: 21.04.2004 Patentblatt 2004/17
(51) Int Cl.: B23K 26/28 (2014.01) B23K 26/32 (2014.01) B23K 26/30 (2014.01) B23K 33/00 (2006.01)
 Int Cl.: B23K 26/28 (2014.01) B23K 26/32 (2014.01) B23K 26/30 (2014.01) B23K 33/00 (2006.01)") (19) TEPZZ 87_Z ZA_T (11) EP 2 871 0 A1 (12) EUROPÄISCHE PATENTANMELDUNG (43) Veröffentlichungstag: 13.0.1 Patentblatt 1/ (21) Anmeldenummer: 13192326.0 (1) Int Cl.: B23K 26/28 (14.01) B23K 26/32 (14.01)
(19) TEPZZ 87_Z ZA_T (11) EP 2 871 0 A1 (12) EUROPÄISCHE PATENTANMELDUNG (43) Veröffentlichungstag: 13.0.1 Patentblatt 1/ (21) Anmeldenummer: 13192326.0 (1) Int Cl.: B23K 26/28 (14.01) B23K 26/32 (14.01)
EP 1 806 277 A1 (19) (11) EP 1 806 277 A1 (12) EUROPÄISCHE PATENTANMELDUNG. (43) Veröffentlichungstag: 11.07.2007 Patentblatt 2007/28
 (11) EP 1 806 277 A1 (12) EUROPÄISCHE PATENTANMELDUNG. (43) Veröffentlichungstag: 11.07.2007 Patentblatt 2007/28") (19) (12) EUROPÄISCHE PATENTANMELDUNG (11) EP 1 806 277 A1 (43) Veröffentlichungstag: 11.07.2007 Patentblatt 2007/28 (21) Anmeldenummer: 06003966.6 (1) Int Cl.: B63H 1/14 (2006.01) B63H 1/26 (2006.01)
(19) (12) EUROPÄISCHE PATENTANMELDUNG (11) EP 1 806 277 A1 (43) Veröffentlichungstag: 11.07.2007 Patentblatt 2007/28 (21) Anmeldenummer: 06003966.6 (1) Int Cl.: B63H 1/14 (2006.01) B63H 1/26 (2006.01)
*EP001363019A2* EP 1 363 019 A2 (19) (11) EP 1 363 019 A2 (12) EUROPÄISCHE PATENTANMELDUNG. (43) Veröffentlichungstag: 19.11.2003 Patentblatt 2003/47
 (11) EP 1 363 019 A2 (12) EUROPÄISCHE PATENTANMELDUNG. (43) Veröffentlichungstag: 19.11.2003 Patentblatt 2003/47") (19) Europäisches Patentamt European Patent Office Office européen des brevets *EP001363019A2* (11) EP 1 363 019 A2 (12) EUROPÄISCHE PATENTANMELDUNG (43) Veröffentlichungstag: 19.11.2003 Patentblatt 2003/47
(19) Europäisches Patentamt European Patent Office Office européen des brevets *EP001363019A2* (11) EP 1 363 019 A2 (12) EUROPÄISCHE PATENTANMELDUNG (43) Veröffentlichungstag: 19.11.2003 Patentblatt 2003/47
EP 1 750 416 A1 (19) (11) EP 1 750 416 A1 (12) EUROPÄISCHE PATENTANMELDUNG. (43) Veröffentlichungstag: 07.02.2007 Patentblatt 2007/06
 (11) EP 1 750 416 A1 (12) EUROPÄISCHE PATENTANMELDUNG. (43) Veröffentlichungstag: 07.02.2007 Patentblatt 2007/06") (19) (12) EUROPÄISCHE PATENTANMELDUNG (11) EP 1 750 416 A1 (43) Veröffentlichungstag: 07.02.2007 Patentblatt 2007/06 (51) Int Cl.: H04L 29/12 (2006.01) (21) Anmeldenummer: 05016706.3 (22) Anmeldetag: 01.08.2005
(19) (12) EUROPÄISCHE PATENTANMELDUNG (11) EP 1 750 416 A1 (43) Veröffentlichungstag: 07.02.2007 Patentblatt 2007/06 (51) Int Cl.: H04L 29/12 (2006.01) (21) Anmeldenummer: 05016706.3 (22) Anmeldetag: 01.08.2005
EP 1 768 449 A1 (19) (11) EP 1 768 449 A1 (12) EUROPÄISCHE PATENTANMELDUNG. (43) Veröffentlichungstag: 28.03.2007 Patentblatt 2007/13
 (11) EP 1 768 449 A1 (12) EUROPÄISCHE PATENTANMELDUNG. (43) Veröffentlichungstag: 28.03.2007 Patentblatt 2007/13") (19) (12) EUROPÄISCHE PATENTANMELDUNG (11) EP 1 768 449 A1 (43) Veröffentlichungstag: 28.03.2007 Patentblatt 2007/13 (51) Int Cl.: H04R 25/00 (2006.01) (21) Anmeldenummer: 06120912.8 (22) Anmeldetag: 19.09.2006
(19) (12) EUROPÄISCHE PATENTANMELDUNG (11) EP 1 768 449 A1 (43) Veröffentlichungstag: 28.03.2007 Patentblatt 2007/13 (51) Int Cl.: H04R 25/00 (2006.01) (21) Anmeldenummer: 06120912.8 (22) Anmeldetag: 19.09.2006
(51) Int Cl.: F24J 2/52 (2006.01) H01L 31/048 (2006.01)
 Int Cl.: F24J 2/52 (2006.01) H01L 31/048 (2006.01)") (19) Europäisches Patentamt European Patent Office Office européen des brevets (12) EUROPÄISCHE PATENTANMELDUNG (11) EP 1 705 434 A1 (43) Veröffentlichungstag: 27.09.2006 Patentblatt 2006/39 (51) Int Cl.:
(19) Europäisches Patentamt European Patent Office Office européen des brevets (12) EUROPÄISCHE PATENTANMELDUNG (11) EP 1 705 434 A1 (43) Veröffentlichungstag: 27.09.2006 Patentblatt 2006/39 (51) Int Cl.:
*EP001308563A2* EP 1 308 563 A2 (19) (11) EP 1 308 563 A2 (12) EUROPÄISCHE PATENTANMELDUNG. (43) Veröffentlichungstag: 07.05.2003 Patentblatt 2003/19
 (11) EP 1 308 563 A2 (12) EUROPÄISCHE PATENTANMELDUNG. (43) Veröffentlichungstag: 07.05.2003 Patentblatt 2003/19") (19) Europäisches Patentamt European Patent Office Office européen des brevets *EP00130863A2* (11) EP 1 308 63 A2 (12) EUROPÄISCHE PATENTANMELDUNG (43) Veröffentlichungstag: 07.0.2003 Patentblatt 2003/19
(19) Europäisches Patentamt European Patent Office Office européen des brevets *EP00130863A2* (11) EP 1 308 63 A2 (12) EUROPÄISCHE PATENTANMELDUNG (43) Veröffentlichungstag: 07.0.2003 Patentblatt 2003/19
*EP001201606A1* EP 1 201 606 A1 (19) (11) EP 1 201 606 A1 (12) EUROPÄISCHE PATENTANMELDUNG. (43) Veröffentlichungstag: 02.05.2002 Patentblatt 2002/18
 (11) EP 1 201 606 A1 (12) EUROPÄISCHE PATENTANMELDUNG. (43) Veröffentlichungstag: 02.05.2002 Patentblatt 2002/18") (19) Europäisches Patentamt European Patent Office Office européen des brevets *EP001201606A1* (11) EP 1 201 606 A1 (12) EUROPÄISCHE PATENTANMELDUNG (43) Veröffentlichungstag: 02.05.2002 Patentblatt 2002/18
(19) Europäisches Patentamt European Patent Office Office européen des brevets *EP001201606A1* (11) EP 1 201 606 A1 (12) EUROPÄISCHE PATENTANMELDUNG (43) Veröffentlichungstag: 02.05.2002 Patentblatt 2002/18
EP 1 977 674 A2 (19) (11) EP 1 977 674 A2 (12) EUROPÄISCHE PATENTANMELDUNG. (43) Veröffentlichungstag: 08.10.2008 Patentblatt 2008/41
 (11) EP 1 977 674 A2 (12) EUROPÄISCHE PATENTANMELDUNG. (43) Veröffentlichungstag: 08.10.2008 Patentblatt 2008/41") (19) (12) EUROPÄISCHE PATENTANMELDUNG (11) EP 1 977 674 A2 (43) Veröffentlichungstag: 08.10.2008 Patentblatt 2008/41 (1) Int Cl.: A47L 2/00 (2006.01) (21) Anmeldenummer: 0800406.7 (22) Anmeldetag: 22.03.2008
(19) (12) EUROPÄISCHE PATENTANMELDUNG (11) EP 1 977 674 A2 (43) Veröffentlichungstag: 08.10.2008 Patentblatt 2008/41 (1) Int Cl.: A47L 2/00 (2006.01) (21) Anmeldenummer: 0800406.7 (22) Anmeldetag: 22.03.2008
EP 2 025 352 A1 (19) (11) EP 2 025 352 A1 (12) EUROPÄISCHE PATENTANMELDUNG. (43) Veröffentlichungstag: 18.02.2009 Patentblatt 2009/08
 (11) EP 2 025 352 A1 (12) EUROPÄISCHE PATENTANMELDUNG. (43) Veröffentlichungstag: 18.02.2009 Patentblatt 2009/08") (19) (12) EUROPÄISCHE PATENTANMELDUNG (11) EP 2 025 352 A1 (43) Veröffentlichungstag: 18.02.2009 Patentblatt 2009/08 (51) Int Cl.: A61L 12/08 (2006.01) A61L 12/12 (2006.01) (21) Anmeldenummer: 07114144.4
(19) (12) EUROPÄISCHE PATENTANMELDUNG (11) EP 2 025 352 A1 (43) Veröffentlichungstag: 18.02.2009 Patentblatt 2009/08 (51) Int Cl.: A61L 12/08 (2006.01) A61L 12/12 (2006.01) (21) Anmeldenummer: 07114144.4
TEPZZ 8 4 6A_T EP 2 824 226 A1 (19) (11) EP 2 824 226 A1 (12) EUROPÄISCHE PATENTANMELDUNG. (51) Int Cl.: D04B 1/22 (2006.01)
 (11) EP 2 824 226 A1 (12) EUROPÄISCHE PATENTANMELDUNG. (51) Int Cl.: D04B 1/22 (2006.01)") (19) TEPZZ 8 4 6A_T (11) EP 2 824 226 A1 (12) EUROPÄISCHE PATENTANMELDUNG (43) Veröffentlichungstag: 14.01.1 Patentblatt 1/03 (1) Int Cl.: D04B 1/22 (06.01) (21) Anmeldenummer: 13176318.7 (22) Anmeldetag:
(19) TEPZZ 8 4 6A_T (11) EP 2 824 226 A1 (12) EUROPÄISCHE PATENTANMELDUNG (43) Veröffentlichungstag: 14.01.1 Patentblatt 1/03 (1) Int Cl.: D04B 1/22 (06.01) (21) Anmeldenummer: 13176318.7 (22) Anmeldetag:
EP 1 726 825 A1 (19) (11) EP 1 726 825 A1 (12) EUROPÄISCHE PATENTANMELDUNG. (43) Veröffentlichungstag: 29.11.2006 Patentblatt 2006/48
 (11) EP 1 726 825 A1 (12) EUROPÄISCHE PATENTANMELDUNG. (43) Veröffentlichungstag: 29.11.2006 Patentblatt 2006/48") (19) Europäisches Patentamt European Patent Office Office européen des brevets (12) EUROPÄISCHE PATENTANMELDUNG (11) EP 1 726 825 A1 (43) Veröffentlichungstag: 29.11.2006 Patentblatt 2006/48 (51) Int Cl.:
(19) Europäisches Patentamt European Patent Office Office européen des brevets (12) EUROPÄISCHE PATENTANMELDUNG (11) EP 1 726 825 A1 (43) Veröffentlichungstag: 29.11.2006 Patentblatt 2006/48 (51) Int Cl.:
TEPZZ 9_5469A_T EP 2 915 469 A1 (19) (11) EP 2 915 469 A1 (12) EUROPÄISCHE PATENTANMELDUNG. (51) Int Cl.: A47J 42/50 (2006.01)
 (11) EP 2 915 469 A1 (12) EUROPÄISCHE PATENTANMELDUNG. (51) Int Cl.: A47J 42/50 (2006.01)") (19) TEPZZ 9_469A_T (11) EP 2 91 469 A1 (12) EUROPÄISCHE PATENTANMELDUNG (43) Veröffentlichungstag: 09.09.1 Patentblatt 1/37 (1) Int Cl.: A47J 42/0 (06.01) (21) Anmeldenummer: 116042.2 (22) Anmeldetag:
(19) TEPZZ 9_469A_T (11) EP 2 91 469 A1 (12) EUROPÄISCHE PATENTANMELDUNG (43) Veröffentlichungstag: 09.09.1 Patentblatt 1/37 (1) Int Cl.: A47J 42/0 (06.01) (21) Anmeldenummer: 116042.2 (22) Anmeldetag:
TEPZZ 86ZZ 4A_T EP 2 860 024 A1 (19) (11) EP 2 860 024 A1 (12) EUROPÄISCHE PATENTANMELDUNG
 (11) EP 2 860 024 A1 (12) EUROPÄISCHE PATENTANMELDUNG") (19) TEPZZ 86ZZ 4A_T (11) EP 2 860 024 A1 (12) EUROPÄISCHE PATENTANMELDUNG (43) Veröffentlichungstag: 1.04.1 Patentblatt 1/16 (21) Anmeldenummer: 13187709.4 (1) Int Cl.: B31B 1/2 (06.01) B23K 26/ (14.01)
(19) TEPZZ 86ZZ 4A_T (11) EP 2 860 024 A1 (12) EUROPÄISCHE PATENTANMELDUNG (43) Veröffentlichungstag: 1.04.1 Patentblatt 1/16 (21) Anmeldenummer: 13187709.4 (1) Int Cl.: B31B 1/2 (06.01) B23K 26/ (14.01)
TEPZZ 8Z_7Z A_T EP 2 801 703 A1 (19) (11) EP 2 801 703 A1 (12) EUROPÄISCHE PATENTANMELDUNG. (43) Veröffentlichungstag: 12.11.2014 Patentblatt 2014/46
 (11) EP 2 801 703 A1 (12) EUROPÄISCHE PATENTANMELDUNG. (43) Veröffentlichungstag: 12.11.2014 Patentblatt 2014/46") (19) TEPZZ 8Z_7Z A_T (11) EP 2 801 703 A1 (12) EUROPÄISCHE PATENTANMELDUNG (43) Veröffentlichungstag: 12.11.14 Patentblatt 14/46 (1) Int Cl.: F01D 11/04 (06.01) (21) Anmeldenummer: 131669.8 (22) Anmeldetag:
(19) TEPZZ 8Z_7Z A_T (11) EP 2 801 703 A1 (12) EUROPÄISCHE PATENTANMELDUNG (43) Veröffentlichungstag: 12.11.14 Patentblatt 14/46 (1) Int Cl.: F01D 11/04 (06.01) (21) Anmeldenummer: 131669.8 (22) Anmeldetag:
*EP001107410A2* EP 1 107 410 A2 (19) (11) EP 1 107 410 A2 (12) EUROPÄISCHE PATENTANMELDUNG. (43) Veröffentlichungstag: 13.06.2001 Patentblatt 2001/24
 (11) EP 1 107 410 A2 (12) EUROPÄISCHE PATENTANMELDUNG. (43) Veröffentlichungstag: 13.06.2001 Patentblatt 2001/24") (19) Europäisches Patentamt European Patent Office Office européen des brevets *EP001107410A2* (11) EP 1 107 410 A2 (12) EUROPÄISCHE PATENTANMELDUNG (43) Veröffentlichungstag: 13.06.2001 Patentblatt 2001/24
(19) Europäisches Patentamt European Patent Office Office européen des brevets *EP001107410A2* (11) EP 1 107 410 A2 (12) EUROPÄISCHE PATENTANMELDUNG (43) Veröffentlichungstag: 13.06.2001 Patentblatt 2001/24
EP 1 715 404 A1 (19) (11) EP 1 715 404 A1 (12) EUROPÄISCHE PATENTANMELDUNG. (43) Veröffentlichungstag: 25.10.2006 Patentblatt 2006/43
 (11) EP 1 715 404 A1 (12) EUROPÄISCHE PATENTANMELDUNG. (43) Veröffentlichungstag: 25.10.2006 Patentblatt 2006/43") (19) Europäisches Patentamt European Patent Office Office européen des brevets (12) EUROPÄISCHE PATENTANMELDUNG (11) EP 1 715 404 A1 (43) Veröffentlichungstag: 25.10.2006 Patentblatt 2006/43 (51) Int Cl.:
(19) Europäisches Patentamt European Patent Office Office européen des brevets (12) EUROPÄISCHE PATENTANMELDUNG (11) EP 1 715 404 A1 (43) Veröffentlichungstag: 25.10.2006 Patentblatt 2006/43 (51) Int Cl.:
*EP001243288A2* EP 1 243 288 A2 (19) (11) EP 1 243 288 A2 (12) EUROPÄISCHE PATENTANMELDUNG. (43) Veröffentlichungstag: 25.09.2002 Patentblatt 2002/39
 (11) EP 1 243 288 A2 (12) EUROPÄISCHE PATENTANMELDUNG. (43) Veröffentlichungstag: 25.09.2002 Patentblatt 2002/39") (19) Europäisches Patentamt European Patent Office Office européen des brevets *EP001243288A2* (11) EP 1 243 288 A2 (12) EUROPÄISCHE PATENTANMELDUNG (43) Veröffentlichungstag: 2.09.2002 Patentblatt 2002/39
(19) Europäisches Patentamt European Patent Office Office européen des brevets *EP001243288A2* (11) EP 1 243 288 A2 (12) EUROPÄISCHE PATENTANMELDUNG (43) Veröffentlichungstag: 2.09.2002 Patentblatt 2002/39
EP 1 085 737 A2 (19) (11) EP 1 085 737 A2 (12) EUROPÄISCHE PATENTANMELDUNG. (43) Veröffentlichungstag: 21.03.2001 Patentblatt 2001/12
 (11) EP 1 085 737 A2 (12) EUROPÄISCHE PATENTANMELDUNG. (43) Veröffentlichungstag: 21.03.2001 Patentblatt 2001/12") (19) Europäisches Patentamt European Patent Office Office européen des brevets (11) EP 1 08 737 A2 (12) EUROPÄISCHE PATENTANMELDUNG (43) Veröffentlichungstag: 21.03.01 Patentblatt 01/12 (1) Int. Cl. 7
(19) Europäisches Patentamt European Patent Office Office européen des brevets (11) EP 1 08 737 A2 (12) EUROPÄISCHE PATENTANMELDUNG (43) Veröffentlichungstag: 21.03.01 Patentblatt 01/12 (1) Int. Cl. 7
*EP001146759A2* EP 1 146 759 A2 (19) (11) EP 1 146 759 A2 (12) EUROPÄISCHE PATENTANMELDUNG. (43) Veröffentlichungstag: 17.10.2001 Patentblatt 2001/42
 (11) EP 1 146 759 A2 (12) EUROPÄISCHE PATENTANMELDUNG. (43) Veröffentlichungstag: 17.10.2001 Patentblatt 2001/42") (19) Europäisches Patentamt European Patent Office Office européen des brevets *EP00114679A2* (11) EP 1 146 79 A2 (12) EUROPÄISCHE PATENTANMELDUNG (43) Veröffentlichungstag: 17..01 Patentblatt 01/42 (1)
(19) Europäisches Patentamt European Patent Office Office européen des brevets *EP00114679A2* (11) EP 1 146 79 A2 (12) EUROPÄISCHE PATENTANMELDUNG (43) Veröffentlichungstag: 17..01 Patentblatt 01/42 (1)
TEPZZ 8 4 6A_T EP 2 824 326 A1 (19) (11) EP 2 824 326 A1 (12) EUROPÄISCHE PATENTANMELDUNG. (51) Int Cl.: F03D 11/00 (2006.01) G01M 11/08 (2006.
 (11) EP 2 824 326 A1 (12) EUROPÄISCHE PATENTANMELDUNG. (51) Int Cl.: F03D 11/00 (2006.01) G01M 11/08 (2006.") (19) TEPZZ 8 4 6A_T (11) EP 2 824 326 A1 (12) EUROPÄISCHE PATENTANMELDUNG (43) Veröffentlichungstag: 14.01.201 Patentblatt 201/03 (1) Int Cl.: F03D 11/00 (2006.01) G01M 11/08 (2006.01) (21) Anmeldenummer:
(19) TEPZZ 8 4 6A_T (11) EP 2 824 326 A1 (12) EUROPÄISCHE PATENTANMELDUNG (43) Veröffentlichungstag: 14.01.201 Patentblatt 201/03 (1) Int Cl.: F03D 11/00 (2006.01) G01M 11/08 (2006.01) (21) Anmeldenummer:
EP 2 371 622 A2 (19) (11) EP 2 371 622 A2 (12) EUROPÄISCHE PATENTANMELDUNG. (43) Veröffentlichungstag: 05.10.2011 Patentblatt 2011/40
 (11) EP 2 371 622 A2 (12) EUROPÄISCHE PATENTANMELDUNG. (43) Veröffentlichungstag: 05.10.2011 Patentblatt 2011/40") (19) (12) EUROPÄISCHE PATENTANMELDUNG (11) EP 2 371 622 A2 (43) Veröffentlichungstag: 0..11 Patentblatt 11/ (1) Int Cl.: B60N 2/68 (06.01) B60N 2/64 (06.01) (21) Anmeldenummer: 10272.7 (22) Anmeldetag:
(19) (12) EUROPÄISCHE PATENTANMELDUNG (11) EP 2 371 622 A2 (43) Veröffentlichungstag: 0..11 Patentblatt 11/ (1) Int Cl.: B60N 2/68 (06.01) B60N 2/64 (06.01) (21) Anmeldenummer: 10272.7 (22) Anmeldetag:
EP 2 301 396 A1 (19) (11) EP 2 301 396 A1 (12) EUROPÄISCHE PATENTANMELDUNG. (43) Veröffentlichungstag: 30.03.2011 Patentblatt 2011/13
 (11) EP 2 301 396 A1 (12) EUROPÄISCHE PATENTANMELDUNG. (43) Veröffentlichungstag: 30.03.2011 Patentblatt 2011/13") (19) (12) EUROPÄISCHE PATENTANMELDUNG (11) EP 2 301 396 A1 (43) Veröffentlichungstag: 30.03.2011 Patentblatt 2011/13 (51) Int Cl.: A47J 31/44 (2006.01) (21) Anmeldenummer: 10009037.2 (22) Anmeldetag: 31.08.2010
(19) (12) EUROPÄISCHE PATENTANMELDUNG (11) EP 2 301 396 A1 (43) Veröffentlichungstag: 30.03.2011 Patentblatt 2011/13 (51) Int Cl.: A47J 31/44 (2006.01) (21) Anmeldenummer: 10009037.2 (22) Anmeldetag: 31.08.2010
EP 1 906 287 A1 (19) (11) EP 1 906 287 A1 (12) EUROPÄISCHE PATENTANMELDUNG. (43) Veröffentlichungstag: 02.04.2008 Patentblatt 2008/14
 (11) EP 1 906 287 A1 (12) EUROPÄISCHE PATENTANMELDUNG. (43) Veröffentlichungstag: 02.04.2008 Patentblatt 2008/14") (19) (12) EUROPÄISCHE PATENTANMELDUNG (11) EP 1 906 287 A1 (43) Veröffentlichungstag: 02.04.2008 Patentblatt 2008/14 (1) Int Cl.: G0B 19/418 (2006.01) (21) Anmeldenummer: 07018. (22) Anmeldetag: 11.08.2007
(19) (12) EUROPÄISCHE PATENTANMELDUNG (11) EP 1 906 287 A1 (43) Veröffentlichungstag: 02.04.2008 Patentblatt 2008/14 (1) Int Cl.: G0B 19/418 (2006.01) (21) Anmeldenummer: 07018. (22) Anmeldetag: 11.08.2007
EP 1 998 113 A2 (19) (11) EP 1 998 113 A2 (12) EUROPÄISCHE PATENTANMELDUNG. (51) Int Cl.: F23D 14/56 (2006.01) F23D 14/58 (2006.
 (11) EP 1 998 113 A2 (12) EUROPÄISCHE PATENTANMELDUNG. (51) Int Cl.: F23D 14/56 (2006.01) F23D 14/58 (2006.") (19) (12) EUROPÄISCHE PATENTANMELDUNG (11) EP 1 998 113 A2 (43) Veröffentlichungstag: 03.12.2008 Patentblatt 2008/49 (1) Int Cl.: F23D 14/6 (2006.01) F23D 14/8 (2006.01) (21) Anmeldenummer: 08104138.6
(19) (12) EUROPÄISCHE PATENTANMELDUNG (11) EP 1 998 113 A2 (43) Veröffentlichungstag: 03.12.2008 Patentblatt 2008/49 (1) Int Cl.: F23D 14/6 (2006.01) F23D 14/8 (2006.01) (21) Anmeldenummer: 08104138.6
TEPZZ 8 475 A_T EP 2 824 753 A1 (19) (11) EP 2 824 753 A1 (12) EUROPÄISCHE PATENTANMELDUNG. (43) Veröffentlichungstag: 14.01.2015 Patentblatt 2015/03
 (11) EP 2 824 753 A1 (12) EUROPÄISCHE PATENTANMELDUNG. (43) Veröffentlichungstag: 14.01.2015 Patentblatt 2015/03") (19) TEPZZ 8 47 A_T (11) EP 2 824 73 A1 (12) EUROPÄISCHE PATENTANMELDUNG (43) Veröffentlichungstag: 14.01.1 Patentblatt 1/03 (21) Anmeldenummer: 1417603.2 (1) Int Cl.: H01M /44 (06.01) H01M /48 (06.01)
(19) TEPZZ 8 47 A_T (11) EP 2 824 73 A1 (12) EUROPÄISCHE PATENTANMELDUNG (43) Veröffentlichungstag: 14.01.1 Patentblatt 1/03 (21) Anmeldenummer: 1417603.2 (1) Int Cl.: H01M /44 (06.01) H01M /48 (06.01)
PATENTANMELDUNG. int. Ci.5; H05K 3/34, B23K 3/06, B23K 3/08, H05K 13/00
 Europäisches Patentamt European Patent Office Office europeen des brevets Veröffentlichungsnummer: 0 562 243 AI EUROPAISCHE PATENTANMELDUNG Anmeldenummer: 93101688.5 @ Anmeldetag: 04.02.93 int. Ci.5; H05K
Europäisches Patentamt European Patent Office Office europeen des brevets Veröffentlichungsnummer: 0 562 243 AI EUROPAISCHE PATENTANMELDUNG Anmeldenummer: 93101688.5 @ Anmeldetag: 04.02.93 int. Ci.5; H05K
EP 1 864 807 A2 (19) (11) EP 1 864 807 A2 (12) EUROPÄISCHE PATENTANMELDUNG. (43) Veröffentlichungstag: 12.12.2007 Patentblatt 2007/50
 (11) EP 1 864 807 A2 (12) EUROPÄISCHE PATENTANMELDUNG. (43) Veröffentlichungstag: 12.12.2007 Patentblatt 2007/50") (19) (12) EUROPÄISCHE PATENTANMELDUNG (11) EP 1 864 807 A2 (43) Veröffentlichungstag: 12.12.07 Patentblatt 07/0 (1) Int Cl.: B41F 33/00 (06.01) (21) Anmeldenummer: 0701121.1 (22) Anmeldetag: 08.06.07 (84)
(19) (12) EUROPÄISCHE PATENTANMELDUNG (11) EP 1 864 807 A2 (43) Veröffentlichungstag: 12.12.07 Patentblatt 07/0 (1) Int Cl.: B41F 33/00 (06.01) (21) Anmeldenummer: 0701121.1 (22) Anmeldetag: 08.06.07 (84)
(54) Verfahren zum Weiterführen eines Gesprächs durch Erzeugen einer R- Gespräch- Telefonverbindung bei aufgebrauchtem Prepaid- Karten- Guthaben
 Verfahren zum Weiterführen eines Gesprächs durch Erzeugen einer R- Gespräch- Telefonverbindung bei aufgebrauchtem Prepaid- Karten- Guthaben") (19) (12) EUROPÄISCHE PATENTANMELDUNG (11) EP 1 777 932 A1 (43) Veröffentlichungstag: 2.04.2007 Patentblatt 2007/17 (21) Anmeldenummer: 0023089. (1) Int Cl.: H04M 1/00 (2006.01) H04M 17/00 (2006.01) H04M
(19) (12) EUROPÄISCHE PATENTANMELDUNG (11) EP 1 777 932 A1 (43) Veröffentlichungstag: 2.04.2007 Patentblatt 2007/17 (21) Anmeldenummer: 0023089. (1) Int Cl.: H04M 1/00 (2006.01) H04M 17/00 (2006.01) H04M
Int CI.3: B 01 D 53/02 F 04 C 29/02, F 01 C 21/04
 European Patent Office Office europeen des brevets Veröffentlichungsnummer: 0 024 595 A1 EUROPAISCHE PATENTANMELDUNG Anmeldenummer: 80104649.1 Anmeldetag: 06.08.80 Int CI.3: B 01 D 53/02 F 04 C 29/02,
European Patent Office Office europeen des brevets Veröffentlichungsnummer: 0 024 595 A1 EUROPAISCHE PATENTANMELDUNG Anmeldenummer: 80104649.1 Anmeldetag: 06.08.80 Int CI.3: B 01 D 53/02 F 04 C 29/02,
*EP001220550A2* EP 1 220 550 A2 (19) (11) EP 1 220 550 A2 (12) EUROPÄISCHE PATENTANMELDUNG. (43) Veröffentlichungstag: 03.07.2002 Patentblatt 2002/27
 (11) EP 1 220 550 A2 (12) EUROPÄISCHE PATENTANMELDUNG. (43) Veröffentlichungstag: 03.07.2002 Patentblatt 2002/27") (19) Europäisches Patentamt European Patent Office Office européen des brevets *EP0012200A2* (11) EP 1 220 0 A2 (12) EUROPÄISCHE PATENTANMELDUNG (43) Veröffentlichungstag: 03.07.2002 Patentblatt 2002/27
(19) Europäisches Patentamt European Patent Office Office européen des brevets *EP0012200A2* (11) EP 1 220 0 A2 (12) EUROPÄISCHE PATENTANMELDUNG (43) Veröffentlichungstag: 03.07.2002 Patentblatt 2002/27
*EP001367686A2* EP 1 367 686 A2 (19) (11) EP 1 367 686 A2 (12) EUROPÄISCHE PATENTANMELDUNG. (43) Veröffentlichungstag: 03.12.2003 Patentblatt 2003/49
 (11) EP 1 367 686 A2 (12) EUROPÄISCHE PATENTANMELDUNG. (43) Veröffentlichungstag: 03.12.2003 Patentblatt 2003/49") (19) Europäisches Patentamt European Patent Office Office européen des brevets *EP001367686A2* (11) EP 1 367 686 A2 (12) EUROPÄISCHE PATENTANMELDUNG (43) Veröffentlichungstag: 03.12.03 Patentblatt 03/49
(19) Europäisches Patentamt European Patent Office Office européen des brevets *EP001367686A2* (11) EP 1 367 686 A2 (12) EUROPÄISCHE PATENTANMELDUNG (43) Veröffentlichungstag: 03.12.03 Patentblatt 03/49
*EP001468709A1* EP 1 468 709 A1 (19) (11) EP 1 468 709 A1 (12) EUROPÄISCHE PATENTANMELDUNG. (43) Veröffentlichungstag: 20.10.2004 Patentblatt 2004/43
 (11) EP 1 468 709 A1 (12) EUROPÄISCHE PATENTANMELDUNG. (43) Veröffentlichungstag: 20.10.2004 Patentblatt 2004/43") (19) Europäisches Patentamt European Patent Office Office européen des brevets *EP001468709A1* (11) EP 1 468 709 A1 (12) EUROPÄISCHE PATENTANMELDUNG (43) Veröffentlichungstag: 20.10.2004 Patentblatt 2004/43
(19) Europäisches Patentamt European Patent Office Office européen des brevets *EP001468709A1* (11) EP 1 468 709 A1 (12) EUROPÄISCHE PATENTANMELDUNG (43) Veröffentlichungstag: 20.10.2004 Patentblatt 2004/43
*EP001258445A1* EP 1 258 445 A1 (19) (11) EP 1 258 445 A1 (12) EUROPÄISCHE PATENTANMELDUNG. (43) Veröffentlichungstag: 20.11.2002 Patentblatt 2002/47
 (11) EP 1 258 445 A1 (12) EUROPÄISCHE PATENTANMELDUNG. (43) Veröffentlichungstag: 20.11.2002 Patentblatt 2002/47") (19) Europäisches Patentamt European Patent Office Office européen des brevets *EP001258445A1* (11) EP 1 258 445 A1 (12) EUROPÄISCHE PATENTANMELDUNG (43) Veröffentlichungstag: 20.11.2002 Patentblatt 2002/47
(19) Europäisches Patentamt European Patent Office Office européen des brevets *EP001258445A1* (11) EP 1 258 445 A1 (12) EUROPÄISCHE PATENTANMELDUNG (43) Veröffentlichungstag: 20.11.2002 Patentblatt 2002/47
EP 1 048 911 A1 (19) (11) EP 1 048 911 A1 (12) EUROPÄISCHE PATENTANMELDUNG. (43) Veröffentlichungstag: 02.11.2000 Patentblatt 2000/44
 (11) EP 1 048 911 A1 (12) EUROPÄISCHE PATENTANMELDUNG. (43) Veröffentlichungstag: 02.11.2000 Patentblatt 2000/44") (19) Europäisches Patentamt European Patent Office Office européen des brevets (11) EP 1 048 911 A1 (12) EUROPÄISCHE PATENTANMELDUNG (43) Veröffentlichungstag: 02.11.2000 Patentblatt 2000/44 (51) Int.
(19) Europäisches Patentamt European Patent Office Office européen des brevets (11) EP 1 048 911 A1 (12) EUROPÄISCHE PATENTANMELDUNG (43) Veröffentlichungstag: 02.11.2000 Patentblatt 2000/44 (51) Int.
EP 1 906 377 A1 (19) (11) EP 1 906 377 A1 (12) EUROPÄISCHE PATENTANMELDUNG. (43) Veröffentlichungstag: 02.04.2008 Patentblatt 2008/14
 (11) EP 1 906 377 A1 (12) EUROPÄISCHE PATENTANMELDUNG. (43) Veröffentlichungstag: 02.04.2008 Patentblatt 2008/14") (19) (12) EUROPÄISCHE PATENTANMELDUNG (11) EP 1 906 377 A1 (43) Veröffentlichungstag: 02.04.2008 Patentblatt 2008/14 (1) Int Cl.: G09B /00 (2006.01) G09B 19/00 (2006.01) (21) Anmeldenummer: 07017047.7
(19) (12) EUROPÄISCHE PATENTANMELDUNG (11) EP 1 906 377 A1 (43) Veröffentlichungstag: 02.04.2008 Patentblatt 2008/14 (1) Int Cl.: G09B /00 (2006.01) G09B 19/00 (2006.01) (21) Anmeldenummer: 07017047.7
Elektrischer Widerstand
 In diesem Versuch sollen Sie die Grundbegriffe und Grundlagen der Elektrizitätslehre wiederholen und anwenden. Sie werden unterschiedlichen Verfahren zur Messung ohmscher Widerstände kennen lernen, ihren
In diesem Versuch sollen Sie die Grundbegriffe und Grundlagen der Elektrizitätslehre wiederholen und anwenden. Sie werden unterschiedlichen Verfahren zur Messung ohmscher Widerstände kennen lernen, ihren
SCHRITT 1: Öffnen des Bildes und Auswahl der Option»Drucken«im Menü»Datei«...2. SCHRITT 2: Angeben des Papierformat im Dialog»Drucklayout«...
 Drucken - Druckformat Frage Wie passt man Bilder beim Drucken an bestimmte Papierformate an? Antwort Das Drucken von Bildern ist mit der Druckfunktion von Capture NX sehr einfach. Hier erklären wir, wie
Drucken - Druckformat Frage Wie passt man Bilder beim Drucken an bestimmte Papierformate an? Antwort Das Drucken von Bildern ist mit der Druckfunktion von Capture NX sehr einfach. Hier erklären wir, wie
(51) Int Cl.: B23K 10/00 (2006.01) B23K 26/38 (2006.01) B23K 26/14 (2006.01) F23D 14/54 (2006.01) H05H 1/34 (2006.01) (72) Erfinder: Czaban, Marco
 Int Cl.: B23K 10/00 (2006.01) B23K 26/38 (2006.01) B23K 26/14 (2006.01) F23D 14/54 (2006.01) H05H 1/34 (2006.01) (72) Erfinder: Czaban, Marco") (19) (12) EUROPÄISCHE PATENTANMELDUNG (11) EP 2 179 814 A1 (43) Veröffentlichungstag: 28.04.2010 Patentblatt 2010/17 (21) Anmeldenummer: 0901242.8 (1) Int Cl.: B23K 10/00 (2006.01) B23K 26/38 (2006.01)
(19) (12) EUROPÄISCHE PATENTANMELDUNG (11) EP 2 179 814 A1 (43) Veröffentlichungstag: 28.04.2010 Patentblatt 2010/17 (21) Anmeldenummer: 0901242.8 (1) Int Cl.: B23K 10/00 (2006.01) B23K 26/38 (2006.01)
PTV VISWALK TIPPS UND TRICKS PTV VISWALK TIPPS UND TRICKS: VERWENDUNG DICHTEBASIERTER TEILROUTEN
 PTV VISWALK TIPPS UND TRICKS PTV VISWALK TIPPS UND TRICKS: VERWENDUNG DICHTEBASIERTER TEILROUTEN Karlsruhe, April 2015 Verwendung dichte-basierter Teilrouten Stellen Sie sich vor, in einem belebten Gebäude,
PTV VISWALK TIPPS UND TRICKS PTV VISWALK TIPPS UND TRICKS: VERWENDUNG DICHTEBASIERTER TEILROUTEN Karlsruhe, April 2015 Verwendung dichte-basierter Teilrouten Stellen Sie sich vor, in einem belebten Gebäude,
EP 1 001 509 A2 (19) (11) EP 1 001 509 A2 (12) EUROPÄISCHE PATENTANMELDUNG. (43) Veröffentlichungstag: 17.05.2000 Patentblatt 2000/20
 (11) EP 1 001 509 A2 (12) EUROPÄISCHE PATENTANMELDUNG. (43) Veröffentlichungstag: 17.05.2000 Patentblatt 2000/20") (19) Europäisches Patentamt European Patent Office Office européen des brevets (11) EP 1 001 09 A2 (12) EUROPÄISCHE PATENTANMELDUNG (43) Veröffentlichungstag: 17.0.2000 Patentblatt 2000/20 (1) Int. Cl.
(19) Europäisches Patentamt European Patent Office Office européen des brevets (11) EP 1 001 09 A2 (12) EUROPÄISCHE PATENTANMELDUNG (43) Veröffentlichungstag: 17.0.2000 Patentblatt 2000/20 (1) Int. Cl.
Professionelle Seminare im Bereich MS-Office
 Der Name BEREICH.VERSCHIEBEN() ist etwas unglücklich gewählt. Man kann mit der Funktion Bereiche zwar verschieben, man kann Bereiche aber auch verkleinern oder vergrößern. Besser wäre es, die Funktion
Der Name BEREICH.VERSCHIEBEN() ist etwas unglücklich gewählt. Man kann mit der Funktion Bereiche zwar verschieben, man kann Bereiche aber auch verkleinern oder vergrößern. Besser wäre es, die Funktion
Versuch 3. Frequenzgang eines Verstärkers
 Versuch 3 Frequenzgang eines Verstärkers 1. Grundlagen Ein Verstärker ist eine aktive Schaltung, mit der die Amplitude eines Signals vergößert werden kann. Man spricht hier von Verstärkung v und definiert
Versuch 3 Frequenzgang eines Verstärkers 1. Grundlagen Ein Verstärker ist eine aktive Schaltung, mit der die Amplitude eines Signals vergößert werden kann. Man spricht hier von Verstärkung v und definiert
Handbuch. NAFI Online-Spezial. Kunden- / Datenverwaltung. 1. Auflage. (Stand: 24.09.2014)
") Handbuch NAFI Online-Spezial 1. Auflage (Stand: 24.09.2014) Copyright 2016 by NAFI GmbH Unerlaubte Vervielfältigungen sind untersagt! Inhaltsangabe Einleitung... 3 Kundenauswahl... 3 Kunde hinzufügen...
Handbuch NAFI Online-Spezial 1. Auflage (Stand: 24.09.2014) Copyright 2016 by NAFI GmbH Unerlaubte Vervielfältigungen sind untersagt! Inhaltsangabe Einleitung... 3 Kundenauswahl... 3 Kunde hinzufügen...
EP A2 (19) (11) EP A2 (12) EUROPÄISCHE PATENTANMELDUNG. (43) Veröffentlichungstag: Patentblatt 2011/52
 (11) EP A2 (12) EUROPÄISCHE PATENTANMELDUNG. (43) Veröffentlichungstag: Patentblatt 2011/52") (19) (12) EUROPÄISCHE PATENTANMELDUNG (11) EP 2 399 713 A2 (43) Veröffentlichungstag: 28.12.2011 Patentblatt 2011/52 (51) Int Cl.: B25H 3/06 (2006.01) (21) Anmeldenummer: 11450061.4 (22) Anmeldetag: 19.05.2011
(19) (12) EUROPÄISCHE PATENTANMELDUNG (11) EP 2 399 713 A2 (43) Veröffentlichungstag: 28.12.2011 Patentblatt 2011/52 (51) Int Cl.: B25H 3/06 (2006.01) (21) Anmeldenummer: 11450061.4 (22) Anmeldetag: 19.05.2011
EP A1 (19) (11) EP A1 (12) EUROPÄISCHE PATENTANMELDUNG. (43) Veröffentlichungstag: Patentblatt 2011/16
 (11) EP A1 (12) EUROPÄISCHE PATENTANMELDUNG. (43) Veröffentlichungstag: Patentblatt 2011/16") (19) (12) EUROPÄISCHE PATENTANMELDUNG (11) EP 2 312 417 A1 (43) Veröffentlichungstag: 20.04.2011 Patentblatt 2011/16 (51) Int Cl.: G06F 1/18 (2006.01) (21) Anmeldenummer: 09173294.1 (22) Anmeldetag: 16.10.2009
(19) (12) EUROPÄISCHE PATENTANMELDUNG (11) EP 2 312 417 A1 (43) Veröffentlichungstag: 20.04.2011 Patentblatt 2011/16 (51) Int Cl.: G06F 1/18 (2006.01) (21) Anmeldenummer: 09173294.1 (22) Anmeldetag: 16.10.2009
*EP001506783A1* EP 1 506 783 A1 (19) (11) EP 1 506 783 A1 (12) EUROPÄISCHE PATENTANMELDUNG. (43) Veröffentlichungstag: 16.02.2005 Patentblatt 2005/07
 (11) EP 1 506 783 A1 (12) EUROPÄISCHE PATENTANMELDUNG. (43) Veröffentlichungstag: 16.02.2005 Patentblatt 2005/07") (19) Europäisches Patentamt European Patent Office Office européen des brevets *EP001506783A1* (11) EP 1 506 783 A1 (12) EUROPÄISCHE PATENTANMELDUNG (43) Veröffentlichungstag: 16.02.2005 Patentblatt 2005/07
(19) Europäisches Patentamt European Patent Office Office européen des brevets *EP001506783A1* (11) EP 1 506 783 A1 (12) EUROPÄISCHE PATENTANMELDUNG (43) Veröffentlichungstag: 16.02.2005 Patentblatt 2005/07
EP 2 264 414 A1 (19) (11) EP 2 264 414 A1 (12) EUROPÄISCHE PATENTANMELDUNG. (43) Veröffentlichungstag: 22.12.2010 Patentblatt 2010/51
 (11) EP 2 264 414 A1 (12) EUROPÄISCHE PATENTANMELDUNG. (43) Veröffentlichungstag: 22.12.2010 Patentblatt 2010/51") (19) (12) EUROPÄISCHE PATENTANMELDUNG (11) EP 2 264 414 A1 (43) Veröffentlichungstag: 22.12.2010 Patentblatt 2010/51 (51) Int Cl.: G01J 1/04 (2006.01) G01J 1/42 (2006.01) (21) Anmeldenummer: 09007968.2
(19) (12) EUROPÄISCHE PATENTANMELDUNG (11) EP 2 264 414 A1 (43) Veröffentlichungstag: 22.12.2010 Patentblatt 2010/51 (51) Int Cl.: G01J 1/04 (2006.01) G01J 1/42 (2006.01) (21) Anmeldenummer: 09007968.2
EP A2 (19) (11) EP A2 (12) EUROPÄISCHE PATENTANMELDUNG. (43) Veröffentlichungstag: Patentblatt 2008/10
 (11) EP A2 (12) EUROPÄISCHE PATENTANMELDUNG. (43) Veröffentlichungstag: Patentblatt 2008/10") (19) (12) EUROPÄISCHE PATENTANMELDUNG (11) EP 1 895 137 A2 (43) Veröffentlichungstag: 05.03.2008 Patentblatt 2008/10 (51) Int Cl.: F02F 7/00 (2006.01) (21) Anmeldenummer: 07010763.6 (22) Anmeldetag: 31.05.2007
(19) (12) EUROPÄISCHE PATENTANMELDUNG (11) EP 1 895 137 A2 (43) Veröffentlichungstag: 05.03.2008 Patentblatt 2008/10 (51) Int Cl.: F02F 7/00 (2006.01) (21) Anmeldenummer: 07010763.6 (22) Anmeldetag: 31.05.2007
*EP001100245A2* EP 1 100 245 A2 (19) (11) EP 1 100 245 A2 (12) EUROPÄISCHE PATENTANMELDUNG. (43) Veröffentlichungstag: 16.05.2001 Patentblatt 2001/20
 (11) EP 1 100 245 A2 (12) EUROPÄISCHE PATENTANMELDUNG. (43) Veröffentlichungstag: 16.05.2001 Patentblatt 2001/20") (19) Europäisches Patentamt European Patent Office Office européen des brevets *EP001024A2* (11) EP 1 0 24 A2 (12) EUROPÄISCHE PATENTANMELDUNG (43) Veröffentlichungstag: 16.0.01 Patentblatt 01/ (1) Int
(19) Europäisches Patentamt European Patent Office Office européen des brevets *EP001024A2* (11) EP 1 0 24 A2 (12) EUROPÄISCHE PATENTANMELDUNG (43) Veröffentlichungstag: 16.0.01 Patentblatt 01/ (1) Int
*EP001557907A2* EP 1 557 907 A2 (19) (11) EP 1 557 907 A2 (12) EUROPÄISCHE PATENTANMELDUNG. (43) Veröffentlichungstag: 27.07.2005 Patentblatt 2005/30
 (11) EP 1 557 907 A2 (12) EUROPÄISCHE PATENTANMELDUNG. (43) Veröffentlichungstag: 27.07.2005 Patentblatt 2005/30") (19) Europäisches Patentamt European Patent Office Office européen des brevets *EP0017907A2* (11) EP 1 7 907 A2 (12) EUROPÄISCHE PATENTANMELDUNG (43) Veröffentlichungstag: 27.07.200 Patentblatt 200/30
(19) Europäisches Patentamt European Patent Office Office européen des brevets *EP0017907A2* (11) EP 1 7 907 A2 (12) EUROPÄISCHE PATENTANMELDUNG (43) Veröffentlichungstag: 27.07.200 Patentblatt 200/30
Praktikum Physik. Protokoll zum Versuch: Geometrische Optik. Durchgeführt am 24.11.2011
 Praktikum Physik Protokoll zum Versuch: Geometrische Optik Durchgeführt am 24.11.2011 Gruppe X Name1 und Name 2 (abc.xyz@uni-ulm.de) (abc.xyz@uni-ulm.de) Betreuerin: Wir bestätigen hiermit, dass wir das
Praktikum Physik Protokoll zum Versuch: Geometrische Optik Durchgeführt am 24.11.2011 Gruppe X Name1 und Name 2 (abc.xyz@uni-ulm.de) (abc.xyz@uni-ulm.de) Betreuerin: Wir bestätigen hiermit, dass wir das
Lineargleichungssysteme: Additions-/ Subtraktionsverfahren
 Lineargleichungssysteme: Additions-/ Subtraktionsverfahren W. Kippels 22. Februar 2014 Inhaltsverzeichnis 1 Einleitung 2 2 Lineargleichungssysteme zweiten Grades 2 3 Lineargleichungssysteme höheren als
Lineargleichungssysteme: Additions-/ Subtraktionsverfahren W. Kippels 22. Februar 2014 Inhaltsverzeichnis 1 Einleitung 2 2 Lineargleichungssysteme zweiten Grades 2 3 Lineargleichungssysteme höheren als
Änderung des IFRS 2 Anteilsbasierte Vergütung
 Änderung IFRS 2 Änderung des IFRS 2 Anteilsbasierte Vergütung Anwendungsbereich Paragraph 2 wird geändert, Paragraph 3 gestrichen und Paragraph 3A angefügt. 2 Dieser IFRS ist bei der Bilanzierung aller
Änderung IFRS 2 Änderung des IFRS 2 Anteilsbasierte Vergütung Anwendungsbereich Paragraph 2 wird geändert, Paragraph 3 gestrichen und Paragraph 3A angefügt. 2 Dieser IFRS ist bei der Bilanzierung aller
WinWerk. Prozess 6a Rabatt gemäss Vorjahresverbrauch. KMU Ratgeber AG. Inhaltsverzeichnis. Im Ifang 16 8307 Effretikon
 WinWerk Prozess 6a Rabatt gemäss Vorjahresverbrauch 8307 Effretikon Telefon: 052-740 11 11 Telefax: 052-740 11 71 E-Mail info@kmuratgeber.ch Internet: www.winwerk.ch Inhaltsverzeichnis 1 Ablauf der Rabattverarbeitung...
WinWerk Prozess 6a Rabatt gemäss Vorjahresverbrauch 8307 Effretikon Telefon: 052-740 11 11 Telefax: 052-740 11 71 E-Mail info@kmuratgeber.ch Internet: www.winwerk.ch Inhaltsverzeichnis 1 Ablauf der Rabattverarbeitung...
104 WebUntis -Dokumentation
 104 WebUntis -Dokumentation 4.1.9.2 Das elektronische Klassenbuch im Betrieb Lehrer Aufruf Melden Sie sich mit Ihrem Benutzernamen und Ihrem Passwort am System an. Unter den aktuellen Tagesmeldungen erscheint
104 WebUntis -Dokumentation 4.1.9.2 Das elektronische Klassenbuch im Betrieb Lehrer Aufruf Melden Sie sich mit Ihrem Benutzernamen und Ihrem Passwort am System an. Unter den aktuellen Tagesmeldungen erscheint
EP 2 210 821 A1 (19) (11) EP 2 210 821 A1 (12) EUROPÄISCHE PATENTANMELDUNG. (43) Veröffentlichungstag: 28.07.2010 Patentblatt 2010/30
 (11) EP 2 210 821 A1 (12) EUROPÄISCHE PATENTANMELDUNG. (43) Veröffentlichungstag: 28.07.2010 Patentblatt 2010/30") (19) (12) EUROPÄISCHE PATENTANMELDUNG (11) EP 2 2 821 A1 (43) Veröffentlichungstag: 28.07.20 Patentblatt 20/30 (21) Anmeldenummer: 091580.0 (51) Int Cl.: B65D 73/00 (2006.01) A45C 11/18 (2006.01) G11B
(19) (12) EUROPÄISCHE PATENTANMELDUNG (11) EP 2 2 821 A1 (43) Veröffentlichungstag: 28.07.20 Patentblatt 20/30 (21) Anmeldenummer: 091580.0 (51) Int Cl.: B65D 73/00 (2006.01) A45C 11/18 (2006.01) G11B
Informationsblatt Induktionsbeweis
 Sommer 015 Informationsblatt Induktionsbeweis 31. März 015 Motivation Die vollständige Induktion ist ein wichtiges Beweisverfahren in der Informatik. Sie wird häufig dazu gebraucht, um mathematische Formeln
Sommer 015 Informationsblatt Induktionsbeweis 31. März 015 Motivation Die vollständige Induktion ist ein wichtiges Beweisverfahren in der Informatik. Sie wird häufig dazu gebraucht, um mathematische Formeln
TEPZZ 848_6 A_T EP 2 848 163 A1 (19) (11) EP 2 848 163 A1 (12) EUROPÄISCHE PATENTANMELDUNG
 (11) EP 2 848 163 A1 (12) EUROPÄISCHE PATENTANMELDUNG") (19) TEPZZ 848_6 A_T (11) EP 2 848 163 A1 (12) EUROPÄISCHE PATENTANMELDUNG (43) Veröffentlichungstag: 18.03.201 Patentblatt 201/12 (21) Anmeldenummer: 13184748. (1) Int Cl.: A47F 9/04 (2006.01) G07G 1/00
(19) TEPZZ 848_6 A_T (11) EP 2 848 163 A1 (12) EUROPÄISCHE PATENTANMELDUNG (43) Veröffentlichungstag: 18.03.201 Patentblatt 201/12 (21) Anmeldenummer: 13184748. (1) Int Cl.: A47F 9/04 (2006.01) G07G 1/00
PATENTANMELDUNG. Int. CIA B23K 3/047, H05K 13/04
 Europäisches Patentamt J European Patent Office Office europeen des brevets Veröffentlichungsnummer: 0 41 9 996 A2 EUROPÄISCHE PATENTANMELDUNG Anmeldenummer: 90117874.9 Int. CIA B23K 3/047, H05K 13/04
Europäisches Patentamt J European Patent Office Office europeen des brevets Veröffentlichungsnummer: 0 41 9 996 A2 EUROPÄISCHE PATENTANMELDUNG Anmeldenummer: 90117874.9 Int. CIA B23K 3/047, H05K 13/04
EP A1 (19) (11) EP A1 (12) EUROPÄISCHE PATENTANMELDUNG. (43) Veröffentlichungstag: Patentblatt 2012/04
 (11) EP A1 (12) EUROPÄISCHE PATENTANMELDUNG. (43) Veröffentlichungstag: Patentblatt 2012/04") (19) (12) EUROPÄISCHE PATENTANMELDUNG (11) EP 2 409 619 A1 (43) Veröffentlichungstag: 25.01.2012 Patentblatt 2012/04 (21) Anmeldenummer: 10401110.1 (51) Int Cl.: A47L 5/36 (2006.01) A47L 9/30 (2006.01)
(19) (12) EUROPÄISCHE PATENTANMELDUNG (11) EP 2 409 619 A1 (43) Veröffentlichungstag: 25.01.2012 Patentblatt 2012/04 (21) Anmeldenummer: 10401110.1 (51) Int Cl.: A47L 5/36 (2006.01) A47L 9/30 (2006.01)
TEPZZ 8_86Z5A_T EP 2 818 605 A1 (19) (11) EP 2 818 605 A1 (12) EUROPÄISCHE PATENTANMELDUNG. (51) Int Cl.: E04B 1/64 (2006.01) E04G 23/02 (2006.
 (11) EP 2 818 605 A1 (12) EUROPÄISCHE PATENTANMELDUNG. (51) Int Cl.: E04B 1/64 (2006.01) E04G 23/02 (2006.") (19) TEPZZ 8_86Z5A_T (11) EP 2 818 605 A1 (12) EUROPÄISCHE PATENTANMELDUNG (43) Veröffentlichungstag: 31.12.2014 Patentblatt 2015/01 (51) Int Cl.: E04B 1/64 (2006.01) E04G 23/02 (2006.01) (21) Anmeldenummer:
(19) TEPZZ 8_86Z5A_T (11) EP 2 818 605 A1 (12) EUROPÄISCHE PATENTANMELDUNG (43) Veröffentlichungstag: 31.12.2014 Patentblatt 2015/01 (51) Int Cl.: E04B 1/64 (2006.01) E04G 23/02 (2006.01) (21) Anmeldenummer:
(51) Int Cl.: B60R 25/10 (2006.01) G07B 15/04 (2006.01)
 Int Cl.: B60R 25/10 (2006.01) G07B 15/04 (2006.01)") (19) (12) EUROPÄISCHE PATENTANMELDUNG (11) EP 2 088 041 A1 (43) Veröffentlichungstag: 12.08.2009 Patentblatt 2009/33 (1) Int Cl.: B60R 2/10 (2006.01) G07B 1/04 (2006.01) (21) Anmeldenummer: 08002316.1
(19) (12) EUROPÄISCHE PATENTANMELDUNG (11) EP 2 088 041 A1 (43) Veröffentlichungstag: 12.08.2009 Patentblatt 2009/33 (1) Int Cl.: B60R 2/10 (2006.01) G07B 1/04 (2006.01) (21) Anmeldenummer: 08002316.1
Europäisches Patentamt European Patent Office Veröffentlichungsnummer: 0 1 42 466 Office europeen des brevets EUROPÄISCHE PATENTANMELDUNG
 J Europäisches Patentamt European Patent Office Veröffentlichungsnummer: 0 1 42 466 Office europeen des brevets A1 EUROPÄISCHE PATENTANMELDUNG Anmeldenummer: 84810442.8 Int.CI.4: G 02 B 25/00 Anmeldetag:
J Europäisches Patentamt European Patent Office Veröffentlichungsnummer: 0 1 42 466 Office europeen des brevets A1 EUROPÄISCHE PATENTANMELDUNG Anmeldenummer: 84810442.8 Int.CI.4: G 02 B 25/00 Anmeldetag:
Protokoll des Versuches 7: Umwandlung von elektrischer Energie in Wärmeenergie
 Name: Matrikelnummer: Bachelor Biowissenschaften E-Mail: Physikalisches Anfängerpraktikum II Dozenten: Assistenten: Protokoll des Versuches 7: Umwandlung von elektrischer Energie in ärmeenergie Verantwortlicher
Name: Matrikelnummer: Bachelor Biowissenschaften E-Mail: Physikalisches Anfängerpraktikum II Dozenten: Assistenten: Protokoll des Versuches 7: Umwandlung von elektrischer Energie in ärmeenergie Verantwortlicher
EP 1 947 413 A2 (19) (11) EP 1 947 413 A2 (12) EUROPÄISCHE PATENTANMELDUNG. (43) Veröffentlichungstag: 23.07.2008 Patentblatt 2008/30
 (11) EP 1 947 413 A2 (12) EUROPÄISCHE PATENTANMELDUNG. (43) Veröffentlichungstag: 23.07.2008 Patentblatt 2008/30") (19) (12) EUROPÄISCHE PATENTANMELDUNG (11) EP 1 947 413 A2 (43) Veröffentlichungstag: 23.07.2008 Patentblatt 2008/30 (1) Int Cl.: F41A 23/34 (2006.01) (21) Anmeldenummer: 0800044.0 (22) Anmeldetag: 11.01.2008
(19) (12) EUROPÄISCHE PATENTANMELDUNG (11) EP 1 947 413 A2 (43) Veröffentlichungstag: 23.07.2008 Patentblatt 2008/30 (1) Int Cl.: F41A 23/34 (2006.01) (21) Anmeldenummer: 0800044.0 (22) Anmeldetag: 11.01.2008
Aufgaben. 2.1. Leiten Sie die Formeln (9) und (10) her! Vorbetrachtungen. Der High-Fall
 und (10) her! Vorbetrachtungen. Der High-Fall") Aufgaben 2.1. Leiten Sie die Formeln (9) und (10) her! Vorbetrachtungen I. Die open-collector-gatter auf der "in"-seite dürfen erst einen High erkennen, wenn alle open-collector-gatter der "out"-seite
Aufgaben 2.1. Leiten Sie die Formeln (9) und (10) her! Vorbetrachtungen I. Die open-collector-gatter auf der "in"-seite dürfen erst einen High erkennen, wenn alle open-collector-gatter der "out"-seite
Hinweise zur Kalibrierung von Kameras mit einer AICON Kalibriertafel
 Hinweise zur Kalibrierung von Kameras mit einer AICON Kalibriertafel AICON 3D Systems GmbH Celler Straße 32 D-38114 Braunschweig Telefon: +49 (0) 5 31 58 000 58 Fax: +49 (0) 5 31 58 000 60 Email: info@aicon.de
Hinweise zur Kalibrierung von Kameras mit einer AICON Kalibriertafel AICON 3D Systems GmbH Celler Straße 32 D-38114 Braunschweig Telefon: +49 (0) 5 31 58 000 58 Fax: +49 (0) 5 31 58 000 60 Email: info@aicon.de
1.1 Allgemeines. innerhalb der Nachtzeit (19:00 24:00) Gesamte Normalarbeitszeit (16:00 19:00)
 Gesamte Normalarbeitszeit (16:00 19:00)") Abschnitt 1 Überstunden in der Nacht 11 1.1 Allgemeines # Die Ermittlung und Abrechnung von Überstunden unter der Woche, an Sonn- und Feiertagen wurde bereits im Band I, Abschnitt 3 behandelt. Sehen wir
Abschnitt 1 Überstunden in der Nacht 11 1.1 Allgemeines # Die Ermittlung und Abrechnung von Überstunden unter der Woche, an Sonn- und Feiertagen wurde bereits im Band I, Abschnitt 3 behandelt. Sehen wir
Benutzerhandbuch - Elterliche Kontrolle
 Benutzerhandbuch - Elterliche Kontrolle Verzeichnis Was ist die mymaga-startseite? 1. erste Anmeldung - Administrator 2. schnittstelle 2.1 Administrator - Hautbildschirm 2.2 Administrator - rechtes Menü
Benutzerhandbuch - Elterliche Kontrolle Verzeichnis Was ist die mymaga-startseite? 1. erste Anmeldung - Administrator 2. schnittstelle 2.1 Administrator - Hautbildschirm 2.2 Administrator - rechtes Menü
OECD Programme for International Student Assessment PISA 2000. Lösungen der Beispielaufgaben aus dem Mathematiktest. Deutschland
 OECD Programme for International Student Assessment Deutschland PISA 2000 Lösungen der Beispielaufgaben aus dem Mathematiktest Beispielaufgaben PISA-Hauptstudie 2000 Seite 3 UNIT ÄPFEL Beispielaufgaben
OECD Programme for International Student Assessment Deutschland PISA 2000 Lösungen der Beispielaufgaben aus dem Mathematiktest Beispielaufgaben PISA-Hauptstudie 2000 Seite 3 UNIT ÄPFEL Beispielaufgaben
(51) Int Cl.: A21C 15/00 (2006.01)
 Int Cl.: A21C 15/00 (2006.01)") (19) (12) EUROPÄISCHE PATENTANMELDUNG (11) EP 1 844 68 A2 (43) Veröffentlichungstag: 17..07 Patentblatt 07/42 (1) Int Cl.: A21C 1/00 (06.01) (21) Anmeldenummer: 0700874.8 (22) Anmeldetag: 22.03.07 (84)
(19) (12) EUROPÄISCHE PATENTANMELDUNG (11) EP 1 844 68 A2 (43) Veröffentlichungstag: 17..07 Patentblatt 07/42 (1) Int Cl.: A21C 1/00 (06.01) (21) Anmeldenummer: 0700874.8 (22) Anmeldetag: 22.03.07 (84)
Mit dem Tool Stundenverwaltung von Hanno Kniebel erhalten Sie die Möglichkeit zur effizienten Verwaltung von Montagezeiten Ihrer Mitarbeiter.
 Stundenverwaltung Mit dem Tool Stundenverwaltung von Hanno Kniebel erhalten Sie die Möglichkeit zur effizienten Verwaltung von Montagezeiten Ihrer Mitarbeiter. Dieses Programm zeichnet sich aus durch einfachste
Stundenverwaltung Mit dem Tool Stundenverwaltung von Hanno Kniebel erhalten Sie die Möglichkeit zur effizienten Verwaltung von Montagezeiten Ihrer Mitarbeiter. Dieses Programm zeichnet sich aus durch einfachste
GEVITAS Farben-Reaktionstest
 GEVITAS Farben-Reaktionstest GEVITAS Farben-Reaktionstest Inhalt 1. Allgemeines... 1 2. Funktionsweise der Tests... 2 3. Die Ruhetaste und die Auslösetaste... 2 4. Starten der App Hauptmenü... 3 5. Auswahl
GEVITAS Farben-Reaktionstest GEVITAS Farben-Reaktionstest Inhalt 1. Allgemeines... 1 2. Funktionsweise der Tests... 2 3. Die Ruhetaste und die Auslösetaste... 2 4. Starten der App Hauptmenü... 3 5. Auswahl
Güterverkehr in Österreich
 Güterverkehr in Österreich Transportaufkommen (Millionen Tonnen) 1999 (1) Schiff Pipeline (2) Summe Binnen 243 18 0,8 1 263 Import / Export 51 34 6 12 103 Transit 38 18 3 44 103 Gesamt 331 70 10 57 469
Güterverkehr in Österreich Transportaufkommen (Millionen Tonnen) 1999 (1) Schiff Pipeline (2) Summe Binnen 243 18 0,8 1 263 Import / Export 51 34 6 12 103 Transit 38 18 3 44 103 Gesamt 331 70 10 57 469
Welche Unterschiede gibt es zwischen einem CAPAund einem Audiometrie- Test?
 Welche Unterschiede gibt es zwischen einem CAPAund einem Audiometrie- Test? Auch wenn die Messungsmethoden ähnlich sind, ist das Ziel beider Systeme jedoch ein anderes. Gwenolé NEXER g.nexer@hearin gp
Welche Unterschiede gibt es zwischen einem CAPAund einem Audiometrie- Test? Auch wenn die Messungsmethoden ähnlich sind, ist das Ziel beider Systeme jedoch ein anderes. Gwenolé NEXER g.nexer@hearin gp
Ist Fernsehen schädlich für die eigene Meinung oder fördert es unabhängig zu denken?
 UErörterung zu dem Thema Ist Fernsehen schädlich für die eigene Meinung oder fördert es unabhängig zu denken? 2000 by christoph hoffmann Seite I Gliederung 1. In zu großen Mengen ist alles schädlich. 2.
UErörterung zu dem Thema Ist Fernsehen schädlich für die eigene Meinung oder fördert es unabhängig zu denken? 2000 by christoph hoffmann Seite I Gliederung 1. In zu großen Mengen ist alles schädlich. 2.
Zwischenablage (Bilder, Texte,...)
") Zwischenablage was ist das? Informationen über. die Bedeutung der Windows-Zwischenablage Kopieren und Einfügen mit der Zwischenablage Vermeiden von Fehlern beim Arbeiten mit der Zwischenablage Bei diesen
Zwischenablage was ist das? Informationen über. die Bedeutung der Windows-Zwischenablage Kopieren und Einfügen mit der Zwischenablage Vermeiden von Fehlern beim Arbeiten mit der Zwischenablage Bei diesen
EP 1 782 763 A1 (19) (11) EP 1 782 763 A1 (12) EUROPÄISCHE PATENTANMELDUNG. (43) Veröffentlichungstag: 09.05.2007 Patentblatt 2007/19
 (11) EP 1 782 763 A1 (12) EUROPÄISCHE PATENTANMELDUNG. (43) Veröffentlichungstag: 09.05.2007 Patentblatt 2007/19") (19) (12) EUROPÄISCHE PATENTANMELDUNG (11) EP 1 782 763 A1 (43) Veröffentlichungstag: 09.05.2007 Patentblatt 2007/19 (51) Int Cl.: A61F 2/16 (2006.01) (21) Anmeldenummer: 06020668.7 (22) Anmeldetag: 30.09.2006
(19) (12) EUROPÄISCHE PATENTANMELDUNG (11) EP 1 782 763 A1 (43) Veröffentlichungstag: 09.05.2007 Patentblatt 2007/19 (51) Int Cl.: A61F 2/16 (2006.01) (21) Anmeldenummer: 06020668.7 (22) Anmeldetag: 30.09.2006
Dokumentation IBIS Monitor
 Dokumentation IBIS Monitor Seite 1 von 16 11.01.06 Inhaltsverzeichnis 1. Allgemein 2. Installation und Programm starten 3. Programmkonfiguration 4. Aufzeichnung 4.1 Aufzeichnung mitschneiden 4.1.1 Inhalt
Dokumentation IBIS Monitor Seite 1 von 16 11.01.06 Inhaltsverzeichnis 1. Allgemein 2. Installation und Programm starten 3. Programmkonfiguration 4. Aufzeichnung 4.1 Aufzeichnung mitschneiden 4.1.1 Inhalt
MORE Profile. Pass- und Lizenzverwaltungssystem. Stand: 19.02.2014 MORE Projects GmbH
 MORE Profile Pass- und Lizenzverwaltungssystem erstellt von: Thorsten Schumann erreichbar unter: thorsten.schumann@more-projects.de Stand: MORE Projects GmbH Einführung Die in More Profile integrierte
MORE Profile Pass- und Lizenzverwaltungssystem erstellt von: Thorsten Schumann erreichbar unter: thorsten.schumann@more-projects.de Stand: MORE Projects GmbH Einführung Die in More Profile integrierte
(51) Int Cl.: E02F 9/22 (2006.01) F15B 11/064 (2006.01) F15B 15/14 (2006.01) F15B 21/14 (2006.01) F16F 9/06 (2006.01)
 Int Cl.: E02F 9/22 (2006.01) F15B 11/064 (2006.01) F15B 15/14 (2006.01) F15B 21/14 (2006.01) F16F 9/06 (2006.01)") (19) (12) EUROPÄISCHE PATENTANMELDUNG (11) EP 2 524 997 A1 (43) Veröffentlichungstag: 21.11.2012 Patentblatt 2012/47 (21) Anmeldenummer: 12002912.9 (51) Int Cl.: E02F 9/22 (2006.01) F15B 11/064 (2006.01)
(19) (12) EUROPÄISCHE PATENTANMELDUNG (11) EP 2 524 997 A1 (43) Veröffentlichungstag: 21.11.2012 Patentblatt 2012/47 (21) Anmeldenummer: 12002912.9 (51) Int Cl.: E02F 9/22 (2006.01) F15B 11/064 (2006.01)
FRAGE 39. Gründe, aus denen die Rechte von Patentinhabern beschränkt werden können
 Jahrbuch 1963, Neue Serie Nr. 13, 1. Teil, 66. Jahrgang, Seite 132 25. Kongress von Berlin, 3. - 8. Juni 1963 Der Kongress ist der Auffassung, dass eine Beschränkung der Rechte des Patentinhabers, die
Jahrbuch 1963, Neue Serie Nr. 13, 1. Teil, 66. Jahrgang, Seite 132 25. Kongress von Berlin, 3. - 8. Juni 1963 Der Kongress ist der Auffassung, dass eine Beschränkung der Rechte des Patentinhabers, die
Inventur. Bemerkung. / Inventur
 Inventur Die beliebige Aufteilung des Artikelstamms nach Artikeln, Lieferanten, Warengruppen, Lagerorten, etc. ermöglicht es Ihnen, Ihre Inventur in mehreren Abschnitten durchzuführen. Bemerkung Zwischen
Inventur Die beliebige Aufteilung des Artikelstamms nach Artikeln, Lieferanten, Warengruppen, Lagerorten, etc. ermöglicht es Ihnen, Ihre Inventur in mehreren Abschnitten durchzuführen. Bemerkung Zwischen
Hilfe Bearbeitung von Rahmenleistungsverzeichnissen
 Hilfe Bearbeitung von Rahmenleistungsverzeichnissen Allgemeine Hinweise Inhaltsverzeichnis 1 Allgemeine Hinweise... 3 1.1 Grundlagen...3 1.2 Erstellen und Bearbeiten eines Rahmen-Leistungsverzeichnisses...
Hilfe Bearbeitung von Rahmenleistungsverzeichnissen Allgemeine Hinweise Inhaltsverzeichnis 1 Allgemeine Hinweise... 3 1.1 Grundlagen...3 1.2 Erstellen und Bearbeiten eines Rahmen-Leistungsverzeichnisses...
(51) Intel e H04Q 7/38. Leifeld, Christoph, Dipl.-lng.
 Intel e H04Q 7/38. Leifeld, Christoph, Dipl.-lng.") (19) (12) Europäisches Patentamt European Patent Office Office europeen»peen des brevets EP 0 955 782 A2 EUROPÄISCHE PATENTANMELDUNG (43) Veröffentlichungstag: 10.11.1999 Patentblatt 1999/45 (51) Intel
(19) (12) Europäisches Patentamt European Patent Office Office europeen»peen des brevets EP 0 955 782 A2 EUROPÄISCHE PATENTANMELDUNG (43) Veröffentlichungstag: 10.11.1999 Patentblatt 1999/45 (51) Intel
4. BEZIEHUNGEN ZWISCHEN TABELLEN
 4. BEZIEHUNGEN ZWISCHEN TABELLEN Zwischen Tabellen können in MS Access Beziehungen bestehen. Durch das Verwenden von Tabellen, die zueinander in Beziehung stehen, können Sie Folgendes erreichen: Die Größe
4. BEZIEHUNGEN ZWISCHEN TABELLEN Zwischen Tabellen können in MS Access Beziehungen bestehen. Durch das Verwenden von Tabellen, die zueinander in Beziehung stehen, können Sie Folgendes erreichen: Die Größe
QM: Prüfen -1- KN16.08.2010
 QM: Prüfen -1- KN16.08.2010 2.4 Prüfen 2.4.1 Begriffe, Definitionen Ein wesentlicher Bestandteil der Qualitätssicherung ist das Prüfen. Sie wird aber nicht wie früher nach der Fertigung durch einen Prüfer,
QM: Prüfen -1- KN16.08.2010 2.4 Prüfen 2.4.1 Begriffe, Definitionen Ein wesentlicher Bestandteil der Qualitätssicherung ist das Prüfen. Sie wird aber nicht wie früher nach der Fertigung durch einen Prüfer,
Kennlinienaufnahme elektronische Bauelemente
 Messtechnik-Praktikum 06.05.08 Kennlinienaufnahme elektronische Bauelemente Silvio Fuchs & Simon Stützer 1 Augabenstellung 1. a) Bauen Sie eine Schaltung zur Aufnahme einer Strom-Spannungs-Kennlinie eines
Messtechnik-Praktikum 06.05.08 Kennlinienaufnahme elektronische Bauelemente Silvio Fuchs & Simon Stützer 1 Augabenstellung 1. a) Bauen Sie eine Schaltung zur Aufnahme einer Strom-Spannungs-Kennlinie eines
iphone- und ipad-praxis: Kalender optimal synchronisieren
 42 iphone- und ipad-praxis: Kalender optimal synchronisieren Die Synchronisierung von ios mit anderen Kalendern ist eine elementare Funktion. Die Standard-App bildet eine gute Basis, für eine optimale
42 iphone- und ipad-praxis: Kalender optimal synchronisieren Die Synchronisierung von ios mit anderen Kalendern ist eine elementare Funktion. Die Standard-App bildet eine gute Basis, für eine optimale
Das große ElterngeldPlus 1x1. Alles über das ElterngeldPlus. Wer kann ElterngeldPlus beantragen? ElterngeldPlus verstehen ein paar einleitende Fakten
 Das große x -4 Alles über das Wer kann beantragen? Generell kann jeder beantragen! Eltern (Mütter UND Väter), die schon während ihrer Elternzeit wieder in Teilzeit arbeiten möchten. Eltern, die während
Das große x -4 Alles über das Wer kann beantragen? Generell kann jeder beantragen! Eltern (Mütter UND Väter), die schon während ihrer Elternzeit wieder in Teilzeit arbeiten möchten. Eltern, die während
*EP001588887A1* EP 1 588 887 A1 (19) (11) EP 1 588 887 A1 (12) EUROPÄISCHE PATENTANMELDUNG. (43) Veröffentlichungstag: 26.10.2005 Patentblatt 2005/43
 (11) EP 1 588 887 A1 (12) EUROPÄISCHE PATENTANMELDUNG. (43) Veröffentlichungstag: 26.10.2005 Patentblatt 2005/43") (19) Europäisches Patentamt European Patent Office Office européen des brevets *EP001588887A1* (11) EP 1 588 887 A1 (12) EUROPÄISCHE PATENTANMELDUNG (43) Veröffentlichungstag: 26.10.2005 Patentblatt 2005/43
(19) Europäisches Patentamt European Patent Office Office européen des brevets *EP001588887A1* (11) EP 1 588 887 A1 (12) EUROPÄISCHE PATENTANMELDUNG (43) Veröffentlichungstag: 26.10.2005 Patentblatt 2005/43
Erstellung von Reports mit Anwender-Dokumentation und System-Dokumentation in der ArtemiS SUITE (ab Version 5.0)
") Erstellung von und System-Dokumentation in der ArtemiS SUITE (ab Version 5.0) In der ArtemiS SUITE steht eine neue, sehr flexible Reporting-Funktion zur Verfügung, die mit der Version 5.0 noch einmal verbessert
Erstellung von und System-Dokumentation in der ArtemiS SUITE (ab Version 5.0) In der ArtemiS SUITE steht eine neue, sehr flexible Reporting-Funktion zur Verfügung, die mit der Version 5.0 noch einmal verbessert
Zeichen bei Zahlen entschlüsseln
 Zeichen bei Zahlen entschlüsseln In diesem Kapitel... Verwendung des Zahlenstrahls Absolut richtige Bestimmung von absoluten Werten Operationen bei Zahlen mit Vorzeichen: Addieren, Subtrahieren, Multiplizieren
Zeichen bei Zahlen entschlüsseln In diesem Kapitel... Verwendung des Zahlenstrahls Absolut richtige Bestimmung von absoluten Werten Operationen bei Zahlen mit Vorzeichen: Addieren, Subtrahieren, Multiplizieren
Würfelt man dabei je genau 10 - mal eine 1, 2, 3, 4, 5 und 6, so beträgt die Anzahl. der verschiedenen Reihenfolgen, in denen man dies tun kann, 60!.
 040304 Übung 9a Analysis, Abschnitt 4, Folie 8 Die Wahrscheinlichkeit, dass bei n - maliger Durchführung eines Zufallexperiments ein Ereignis A ( mit Wahrscheinlichkeit p p ( A ) ) für eine beliebige Anzahl
040304 Übung 9a Analysis, Abschnitt 4, Folie 8 Die Wahrscheinlichkeit, dass bei n - maliger Durchführung eines Zufallexperiments ein Ereignis A ( mit Wahrscheinlichkeit p p ( A ) ) für eine beliebige Anzahl
Anwendungshinweise zur Anwendung der Soziometrie
 Anwendungshinweise zur Anwendung der Soziometrie Einführung Die Soziometrie ist ein Verfahren, welches sich besonders gut dafür eignet, Beziehungen zwischen Mitgliedern einer Gruppe darzustellen. Das Verfahren
Anwendungshinweise zur Anwendung der Soziometrie Einführung Die Soziometrie ist ein Verfahren, welches sich besonders gut dafür eignet, Beziehungen zwischen Mitgliedern einer Gruppe darzustellen. Das Verfahren
TEPZZ 7Z868_A T EP A2 (19) (11) EP A2 (12) EUROPÄISCHE PATENTANMELDUNG
 (11) EP A2 (12) EUROPÄISCHE PATENTANMELDUNG") (19) TEPZZ 7Z868_A T (11) EP 2 708 681 A2 (12) EUROPÄISCHE PATENTANMELDUNG (43) Veröffentlichungstag: 19.03.2014 Patentblatt 2014/12 (21) Anmeldenummer: 13182643.0 (1) Int Cl.: E0B 9/04 (2006.01) E0B 47/06
(19) TEPZZ 7Z868_A T (11) EP 2 708 681 A2 (12) EUROPÄISCHE PATENTANMELDUNG (43) Veröffentlichungstag: 19.03.2014 Patentblatt 2014/12 (21) Anmeldenummer: 13182643.0 (1) Int Cl.: E0B 9/04 (2006.01) E0B 47/06