Die Daten (Befehle und numerische Daten) werden in Form von BIT-Folgen verarbeitet.
|
|
|
- Gudrun Franke
- vor 8 Jahren
- Abrufe
Transkript
1 Übung Nr. 1b: MIKROPROZESSOR, Hewlett - Packard µ-lab en sind kleine Computer, die mit externen Geräten Daten austauschen können. Sie verfügen über Speicher, um Programme und Daten zu speichern und Eingangsund Ausgangstore, um mit anderen Geräten zu verkehren. Das Grundsystem wird Mikrocomputer genannt und die über Eingangs/Ausgangstore verbundenen Geräte werden als Peripheriegeräte bezeichnet. Die einzelnen Komponenten werden mittels Adreß-, Datenund Steuerbusleitungen verbunden. Die Daten (Befehle und numerische Daten) werden in Form von BIT-Folgen verarbeitet. BIT (binary digit): einstellige Ziffer: Eins oder Null (1 od. 0) bzw. high or low BYTE:zu Worten zusammengefaßte Bits. Besonders ältere en haben oft noch eine Wortlänge von acht Bits. Der Speicher ist auch heute noch in Bytes zu je 8 BIT organisiert. Die Speicher eines Mikrocomputers können eine bestimmte Anzahl von BIT-Wörtern (Bytes) speichern: z.b: 1 K = 210 = Speicherarten: RAM: (random access memory): frei adressierbarer Lese/ Schreib - Speicher ROM: (read only memory): Festwert- oder Permanentspeicher, der nur gelesen werden kann. Bei der Fertigung des Mikrocomputers wird eine einmalige Programmierung vorgenommen - vom Hersteller - sodaß die Funktion des Bausteins endgültig festgelegt ist. PROM: EPROM: (programable ROM): Der Anwender programmiert diese ROMs selbst. Die Programme können dann nicht mehr geändert werden. Wiederholt vom Anwender neu programmierbare PROMs. Der des µlab besitzt einen 2K ROM - Speicher und einen 1 K RAM - Speicher. 1
 werden in Form von BIT-Folgen verarbeitet.")
2 Die Speicherbelegung des µ-lab ist wie folgt organisiert: LED = Leuchtdiode (light emitting diode) Die einzelnen Komponenten des s sind durch Bus - Leitungen miteinander verbunden. Ein Bus besteht aus einer Anzahl von Signalleitungen, die die einzelnen Elemente des Systems parallel verbinden. Diese Signalleitungen übertragen je ein BIT durch die Spannung high (etwa 5 Volt) oder low (etwa 0 Volt). Der Adress - Bus mit 16 Bit wird verwendet, um eine Komponente anzusteuern (Einwegübertragung, geht vom aus). Wenn der eine bestimmte Komponente, angesteuert hat (z.b. eine Speicherstelle - Byte), so überträgt er die Daten über den 8-Bit - Daten - Bus. (Zweiweg-Bus, Übertragung von und zum ). Der Steuer - Bus ist ein Einweg-Bus, über den die Speicher und die Ein/Ausgabe-Einheit angesteuert werden, damit sie bereit sind, zum richtigen Zeitpunkt entweder Daten aufzunehmen oder abzugeben. Im Speicher wird dann in jene Speicherstelle ein ganzes Wort (8 Bit parallel) geschrieben oder von ihr gelesen, deren Adresse an den Adresseingängen anliegt. 2
. Wenn der eine bestimmte Komponente, angesteuert hat (z.b. eine Speicherstelle - Byte), so überträgt er die Daten über den 8-Bit - Daten - Bus.")
3 Der tauscht mit allen Komponenten Informationen über die gleichen Datenleitungen des Datenbus aus. Dabei wird jene Komponente, mit der der über den Datenbus verkehren will, angesteuert und die übrigen Bauteile ausgeschaltet (Tri state Eigenschaft, d.h. jede Komponente sieht zwar im Prinzip die Daten aller anderen, ignoriert diese aber). Ein Oszillator (Quarz) dient als Systemtaktgenerator. Dieser Generator synchronisiert alle Bauteile des Systems und bestimmt die zeitliche Steuerung der Arbeitsweise des s (2 MHz - Taktgeber: 1 Takt entspricht etwa 0.5 µs). Für die Ausführung eines Befehls sind aber im Allg. mehrere Taktperioden erforderlich. REGISTER Jeder enthält eine Anzahl von internen Speicherplätzen, die als Register bezeichnet werden. Im Gegensatz zu den Speicherplätzen des RAM, die über die BusLeitungen angesteuert werden, steuert der Prozessor die Register direkt über die eingebaute Steuerlogik an. Jedes Register enthält 1 Byte (8 Bit - Information). Die Register moderner Prozessoren haben BIT-Wortbreiten bis zu 64 BIT. Auch der Datenbus ist heut zu Tage aus Geschwindigkeitsgründen bereits mit viel größeren Wortbreiten ausgestattet d.h. es werden mehrere Bytes parallel übertragen. Folgende Register stehen im Prozessor des µlab zur Verfügung: A..... AKKUMUIATOR FL..... FLAG-REGISTER B,C,D,E,H,L.... ALGEMEINE RECHENREGISTER Weiters: Stapelregister, Programmzähler PC, Interrupt Status Register 3
.")
4 Komponenten des s: ALU: dient zur Bearbeitung der Daten ZWISCHENREGISTER: Hilfsspeicher (kein Zugriff für den Programmierer möglich) FLAG-REGISTER: enthält Flipflops, die auf gewisse Zustände hindeuten (negative Zahl, Übertrag, Overflow, usw.) BEFEHLSREGISTER, DEKODER, PC und die Steuer- und Zeitgeber-Logik werden dazu verwendet, Anweisungen aus den Speichern zu holen und ihre Ausführung zu steuern. Spezielle Register: AKKUMULATOR: In diesem Register werden fast alle Rechenoperationen zwischengespeichert FLAG-REGISTER: enthält logische Schalter für verschiedene Kontrollzwecke: Vorzeichenschalter, Übertrag, Parity-bit (Prüfbit) Null-Bit. Die Flag-Register werden nach jedem Befehl neu gesetzt. PC REGISTER (program-counter): Dieses Register enthält immer die Adresse des nächsten auszuführenden Programmbefehls. Der Inhalt des PC wird auf den Adreßbus gelegt, wenn eine Anweisung aus dem Speicher gelesen werden soll. Die adressierte Anweisung erscheint dann auf dem Datenbus. Wenn der Prozessor die Anweisung gelesen hat, wird der PC erhöht bzw. bei einer Sprunganweisung wird die Sprunganweisung in den PC geladen. 4

5 ASSEMBLER - PROGRAMME Eine Anweisung im Binärcode z.b lautet hexdezimal "3C". Dieser Maschinencode wird durch eine Kurzbezeichnung, einen mnemonischen Code (= Abkürzung des Befehlswortlautes zur besseren Lesbarkeit durch den Programmierer) ersetzt. Beim 8085 bedeutet z.b.: 3 C... Inkrementiere das A-Register die Kurzbezeichnung dafür lautet: INR A (increment register A) Jeder Anweisung wird ein Code zugeordnet und Programme, die in dieser Form geschrieben sind, heißen Assembler-Programme. Programmbeispiel: ZÄHLEN BIS ZEHN BASIC - Programm: COUNT = 0 COUNT = COUNT + 1 IF COUNT = 10 THEN GOTO 5 GOTO 2 STOP ASSEMBLER gleiches Programm wie oben (für Prozessor 8085): MVI A,0 LOOP INR A CPI 10 JZ ENDE JMP LOOP ENDE HLT A - Register (Akkumulator) Null gesetzt (MVI = move immediate) Inkrementiere A - Register Vergleiche A-Register mit 10 (CPI = compare immediate, hier wird als Operation einfach eine Subtraktion durchgeführt, die bei Gleichheit null ergibt) Gehe zu ENDE, wenn 10 erreicht ist (JZ = jump to... on zero, wenn vorhergehender Vergleich null ergeben hat) Wiederhole (JMP = jump to.., springe zur Adresse...) Halt Die Marken (= labels ) wie z.b. das Wort Loop bezeichnen Stellen des Programms, die als Sprungziele oder als Startadressen für Unterprogramme dienen können. 5

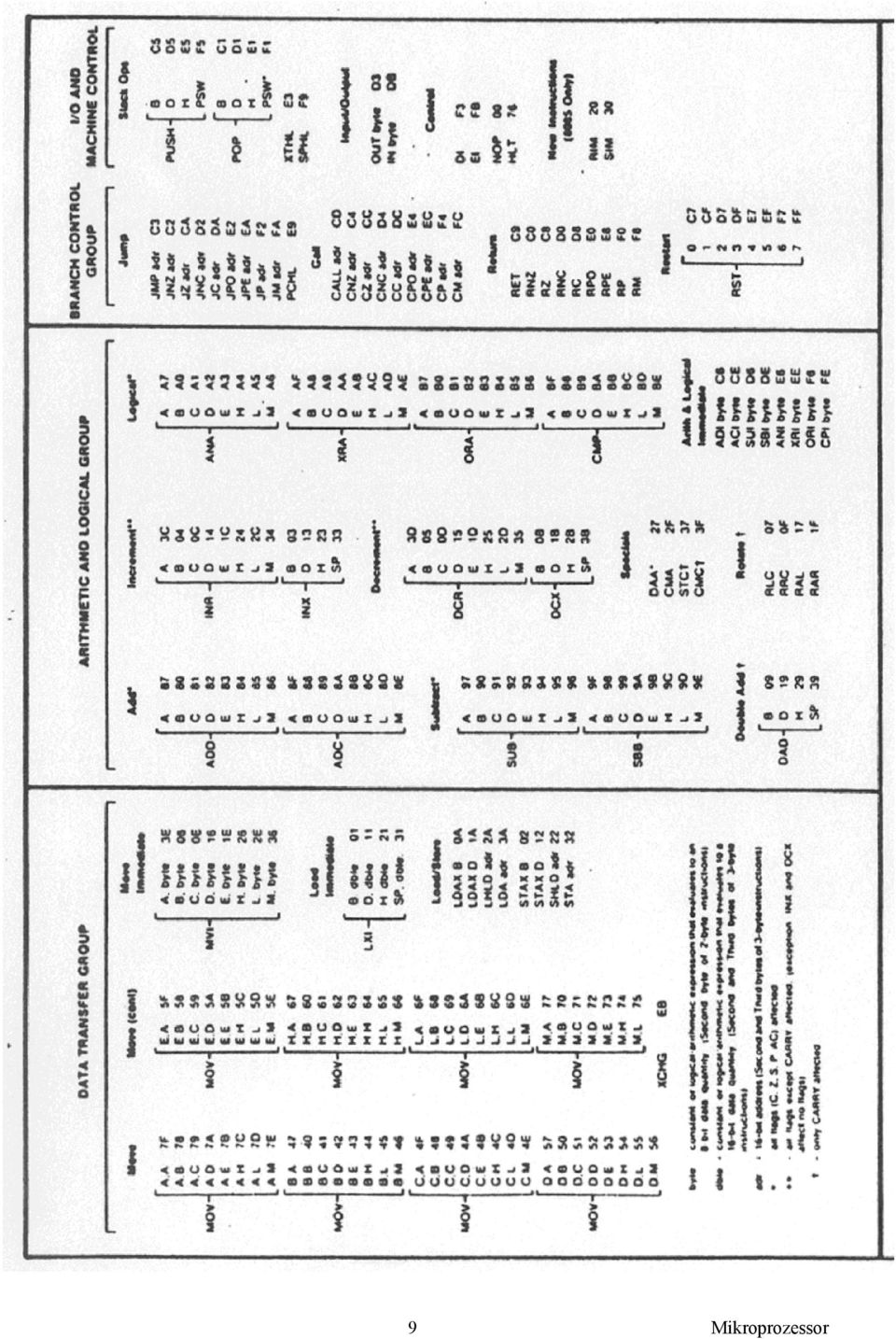
6 Dasselbe Programm in MASCHINENSPRACHE: Speicheradresse (memory adress) Speicherinhalt (memory contents) hexadezimal A 080b binär 3E 00 3C FE 0A CA 0b 08 C E ist der Opcode (Operationscode) für die Anweisung MVI A, dies bedeutet, daß das direkt darauf folgende Byte in den Akkumulator zu laden ist. Die nächste Speicherstelle (0801) enthält das zu ladende Byte (null). Die dritte Speicherstelle enthält den Opcode für die Anweisung INR A (3 C), das Inkrementieren des Akkumulators. FE ist der Opcode für die Anweisung CPI, die unmittelbar darauf folgende Speicherstelle enthält das mit A zu vergleichende Byte (dezimal 10 entspricht hexadezimal 0A). Wenn 10 erreicht ist und der Vergleich positiv ausgeht (d.h. Subtraktion ergibt null ) wird das Zero-FLAG gesetzt. Die Anweisung JZ hat den Opcode CA (Sprung, wenn Zero-FLAG gesetzt ist). Die beiden folgenden Speicherstellen enthalten die zugehörige Sprungadresse - zuerst den niederwertigen und dann den höherwertigen Teil von 080b: zuerst 0b dann 08. Die Anweisung JMP besitzt den Code C 3 und unmittelbar anschließend steht wieder die Sprungadresse, die hier grundsätzlich aus 2 Bytes besteht. Beendet wird das Programm mit dem Byte 76, was der Opcode für HALT ist. Ein Programm kann nur in Maschinensprache direkt ins µ-lab eingegeben werden. Die Übersetzung von hexadezimal in binär führt das Lab selbst durch. Der mnemonische Code für den 8085 ist in weiter unten stehender Tabelle dem einzugebenden Opcode gegenübergestellt. 6
.")
7 BEFEHLSZYKLUS Der Befehlszyklus setzt sich aus dem Abrufzyklus und dem Ausführungszyklus zusammen. Beim Abrufzyklus gibt das Befehlsregister die Informationen,an den Befehlsdekoder weiter. Der Befehlsdekoder erkennt den Opcode und erzeugt Steuersignale für die Zeitgeber- und Steuer- Schaltkreise. Diese verhalten sich wie ein Prozessor innerhalb des s. Ein ROM innerhalb eines Mikro- Prozessor- IC enthält einen Mikrocode, der den Prozessor genauestens anweist, was er bei der Ausführung jeder Anweisung (in Maschinensprache) zu tun hat. Im Ausführungszyklus wird die eigentliche Arbeit verrichtet. Es gibt vier Grundarten von Operationen: a) Daten vom Speicher oder Eingangstor lesen b) Daten in den Speicher oder das Ausgangstor senden c) Operation wird intern im Prozessor ausgeführt (z.b. Register- Operationen) d) Die Kontrolle wird an eine andere Speicherstelle übertragen (Sprungbefehle, Unterprogrammaufruf usw.) Wenn die entsprechende Operation ausgeführt ist, wird dies durch das Mikro-programm-der Steuerlogik angezeigt. Der PC wird inkrementiert und das nächste Byte des Programmes wird in das Befehlsregister geladen. MASCHINENZYKLUS Die Durchführung eines Maschinenbefehls (Befehlszyklus) erfolgt in einem oder mehreren Maschinenzyklen. Der erste Maschinenzyklus jeder Anweisung besteht aus dem Abruf des Opcodes. Ein weiterer Maschinenzyklus wird dann benötigt, wenn es sich um einen Speicherzugriff oder um eine Ein/Ausgabe handelt, damit die Datenübertragung stattfinden kann. Im HARDWARE - EINZELSCHRITT - Modus wird bei jedem Drücken der Taste ein Maschinenzyklus ausgeführt. Jeder Maschinenzyklus besteht aus einem oder mehreren Takten, deren Länge konstant ist und durch die Zeitgeberlogik kontrolliert wird. Im Befehls-Einzelschrittmodus wird bei jedem Drücken der Taste ein Befehlszyklus ausgeführt. Beispiele. a) Input - Tor : LED - Anzeige im HARDWARE - Mode b) im SINGLE - STEP - Mode 7

8 BEDEUTUNG DER TASTEN des µ-lab RESET: a) Stoppt ein laufendes Programm b) oder - falls kein Programm läuft - bringt den in einen definierten Grundzustand RUN: HDWR STEP: Startet ein Programm (Hardware step) Exekutiert einen einzelnen Maschinenzyklus eines Programmes (Instruction step) Exekutiert einen einzelnen Maschinenbefehl (Befehlszyklus) eines Programmes (Interrupt) Ermöglicht einen user-definierten Hardware Interrupt (Fetch Program Counter) Zeigt den Inhalt des Programmzählers Eingabe einer Speicheradresse samt Inhalt Zeigt Registerinhalt beginnend mit Register A an. Mit STORE/INCR: Zugang zu allen übrigen -Registern Speichert Eingabe in die angegebene Adresse oder Register und erhöht Adresse um 1 bzw. zeigt nächstes Register INSTR STEP: INTRPT: FETCH PC: FETCH ADDRS: FETCH REG: STORE/INCR: DECR: Vermindert Adresse um 1 bzw. zeigt vorhergehendes Register Beispiel: Überprüfung von Registerbefehlen mit FETCH REG 8

9 9
10 10

11 Übung 1 Exekution eines bereits gespeicherten Programmes a) FETCH ADRS: b) 05F9 c) RUN d) RESET µlab wartet auf die Eingabe einer Adresse Dies ist die Startadresse für das Programm "Raketenzündung", das im Monitorprogramm des ROM gespeichert ist. Starten des Programmes Stoppen des Programmes Übung 2 Wirkungsweise der Adreß- und Datenbusleitungen Das folgende Programm liest die Bitfolge vom Eingangstor und zeigt sie an der LEDAnzeige am Ausgangstor. START: LDA 2000 CMA STA 3000 JMP START a) (Lade Inhalt von Adresse 2000 in den Akkumulator, LDA = load A from address) (Komplementbildung des Inhaltes von A, da die Ausgangs- LED's mit negativer Logik betrieben werden, d.h. null für Leuchten u. umgek.) (Speichere Inhalt des Akkumulator auf Adresse 3000 ( = LEDs, STA = store A to address) (Sprung zur Adresse des Anfangs) Kodieren des Programmes

12 b) c) Überprüfen des Code Exekution des Programmes mit INSTR STEP: Bei jedem Drücken der Taste wird ein vollständiger Befehlszyklus durchgeführt. Übung 3 Verwendung von Systemunterprogrammen: Es soll ein Programm entworfen werden, daß nach Eingabe einer bestimmten Folge von zwei Zahlen (z.b. 4E ) einen Beep-Ton-erzeugt. Dazu stehen zwei Systemroutinen zur Verfügung. Name Startadresse Zweck KIND 014b BEEP 0010 Lesen der Tastatur und übertragen der gedrückten HEX-Zahl in den Akkumulator Beep-Ton Generator a) Erstellen eines Flußdiagrammes b) Kodierung des Flußdiagrammes (Startadresse: 0800) 12
")
13 c) Eingabe des Programmes und Testen 13
Die Mikroprogrammebene eines Rechners
 Die Mikroprogrammebene eines Rechners Das Abarbeiten eines Arbeitszyklus eines einzelnen Befehls besteht selbst wieder aus verschiedenen Schritten, z.b. Befehl holen Befehl dekodieren Operanden holen etc.
Die Mikroprogrammebene eines Rechners Das Abarbeiten eines Arbeitszyklus eines einzelnen Befehls besteht selbst wieder aus verschiedenen Schritten, z.b. Befehl holen Befehl dekodieren Operanden holen etc.
Microcontroller Kurs. 08.07.11 Microcontroller Kurs/Johannes Fuchs 1
 Microcontroller Kurs 08.07.11 Microcontroller Kurs/Johannes Fuchs 1 Was ist ein Microcontroller Wikipedia: A microcontroller (sometimes abbreviated µc, uc or MCU) is a small computer on a single integrated
Microcontroller Kurs 08.07.11 Microcontroller Kurs/Johannes Fuchs 1 Was ist ein Microcontroller Wikipedia: A microcontroller (sometimes abbreviated µc, uc or MCU) is a small computer on a single integrated
Mikrocomputertechnik. Adressierungsarten
 Adressierungsarten Ein Mikroprozessor bietet meist eine Reihe von Möglichkeiten, die Operanden für eine Rechenoperation zu bestimmen. Diese Möglichkeiten bezeichnet man als Adressierungsarten. unmittelbare
Adressierungsarten Ein Mikroprozessor bietet meist eine Reihe von Möglichkeiten, die Operanden für eine Rechenoperation zu bestimmen. Diese Möglichkeiten bezeichnet man als Adressierungsarten. unmittelbare
Übungscomputer mit Prozessor 8085 - Bedienungsanleitung
 Seite 1 von 9 Pinbelegung der Steckerleisten im Übungsgerät Seite 2 von 9 Inbetriebnahme: Schalter S1, S2, und S3 in Stellung 1 (oben) schalten. Spannung 5 V anlegen. ACHTUNG auf Polarität achten. Taste
Seite 1 von 9 Pinbelegung der Steckerleisten im Übungsgerät Seite 2 von 9 Inbetriebnahme: Schalter S1, S2, und S3 in Stellung 1 (oben) schalten. Spannung 5 V anlegen. ACHTUNG auf Polarität achten. Taste
Facharbeit Informatik. Thema:
 Facharbeit Informatik Thema: Rechneraufbau Mit Locad 2002 1 Inhaltsangabe Inhalt: Seite: 1. Einleitung 3 2. Inbetriebnahme der Schaltung 3 3. Eingabe 4 4. CPU 5 5. RAM/HDD 8 6. Ausgabe 10 7. Auf einer
Facharbeit Informatik Thema: Rechneraufbau Mit Locad 2002 1 Inhaltsangabe Inhalt: Seite: 1. Einleitung 3 2. Inbetriebnahme der Schaltung 3 3. Eingabe 4 4. CPU 5 5. RAM/HDD 8 6. Ausgabe 10 7. Auf einer
Mikrocontroller Grundlagen. Markus Koch April 2011
 Mikrocontroller Grundlagen Markus Koch April 2011 Übersicht Was ist ein Mikrocontroller Aufbau (CPU/RAM/ROM/Takt/Peripherie) Unterschied zum Mikroprozessor Unterschiede der Controllerarten Unterschiede
Mikrocontroller Grundlagen Markus Koch April 2011 Übersicht Was ist ein Mikrocontroller Aufbau (CPU/RAM/ROM/Takt/Peripherie) Unterschied zum Mikroprozessor Unterschiede der Controllerarten Unterschiede
Grundlagen der Informatik
 Mag. Christian Gürtler Programmierung Grundlagen der Informatik 2011 Inhaltsverzeichnis I. Allgemeines 3 1. Zahlensysteme 4 1.1. ganze Zahlen...................................... 4 1.1.1. Umrechnungen.................................
Mag. Christian Gürtler Programmierung Grundlagen der Informatik 2011 Inhaltsverzeichnis I. Allgemeines 3 1. Zahlensysteme 4 1.1. ganze Zahlen...................................... 4 1.1.1. Umrechnungen.................................
Teil VIII Von Neumann Rechner 1
 Teil VIII Von Neumann Rechner 1 Grundlegende Architektur Zentraleinheit: Central Processing Unit (CPU) Ausführen von Befehlen und Ablaufsteuerung Speicher: Memory Ablage von Daten und Programmen Read Only
Teil VIII Von Neumann Rechner 1 Grundlegende Architektur Zentraleinheit: Central Processing Unit (CPU) Ausführen von Befehlen und Ablaufsteuerung Speicher: Memory Ablage von Daten und Programmen Read Only
Programmierung Weichenmodul S/D Tafel 1
 Programmierung Weichenmodul S/D Tafel 1 Voraussetzungen: Fahrspannung ist abgeschalten (rote Taste an MC 2004 oder Einfrieren im Traincontroller) Programmiertaste am Modul ist gedrückt (rote LED leuchtet),
Programmierung Weichenmodul S/D Tafel 1 Voraussetzungen: Fahrspannung ist abgeschalten (rote Taste an MC 2004 oder Einfrieren im Traincontroller) Programmiertaste am Modul ist gedrückt (rote LED leuchtet),
Technische Informatik Basispraktikum Sommersemester 2001
 Technische Informatik Basispraktikum Sommersemester 2001 Protokoll zum Versuchstag 4 Datum: 21.6.2001 Gruppe: David Eißler/ Autor: Verwendete Messgeräte: - digitales Experimentierboard (EB6) - Netzgerät
Technische Informatik Basispraktikum Sommersemester 2001 Protokoll zum Versuchstag 4 Datum: 21.6.2001 Gruppe: David Eißler/ Autor: Verwendete Messgeräte: - digitales Experimentierboard (EB6) - Netzgerät
Daten verarbeiten. Binärzahlen
 Daten verarbeiten Binärzahlen In Digitalrechnern werden (fast) ausschließlich nur Binärzahlen eingesetzt. Das Binärzahlensystem ist das Stellenwertsystem mit der geringsten Anzahl von Ziffern. Es kennt
Daten verarbeiten Binärzahlen In Digitalrechnern werden (fast) ausschließlich nur Binärzahlen eingesetzt. Das Binärzahlensystem ist das Stellenwertsystem mit der geringsten Anzahl von Ziffern. Es kennt
Fax einrichten auf Windows XP-PC
 Um ein PC Fax fähig zu machen braucht man einen sogenannten Telefon Anschluss A/B das heißt, Fax funktioniert im Normalfall nur mit Modem nicht mit DSL. Die meisten neueren PCs haben ein Modem integriert.
Um ein PC Fax fähig zu machen braucht man einen sogenannten Telefon Anschluss A/B das heißt, Fax funktioniert im Normalfall nur mit Modem nicht mit DSL. Die meisten neueren PCs haben ein Modem integriert.
Prozessor HC680 fiktiv
 Prozessor HC680 fiktiv Dokumentation der Simulation Die Simulation umfasst die Struktur und Funktionalität des Prozessors und wichtiger Baugruppen des Systems. Dabei werden in einem Simulationsfenster
Prozessor HC680 fiktiv Dokumentation der Simulation Die Simulation umfasst die Struktur und Funktionalität des Prozessors und wichtiger Baugruppen des Systems. Dabei werden in einem Simulationsfenster
Zahlensysteme: Oktal- und Hexadezimalsystem
 20 Brückenkurs Die gebräuchlichste Bitfolge umfasst 8 Bits, sie deckt also 2 8 =256 Möglichkeiten ab, und wird ein Byte genannt. Zwei Bytes, also 16 Bits, bilden ein Wort, und 4 Bytes, also 32 Bits, formen
20 Brückenkurs Die gebräuchlichste Bitfolge umfasst 8 Bits, sie deckt also 2 8 =256 Möglichkeiten ab, und wird ein Byte genannt. Zwei Bytes, also 16 Bits, bilden ein Wort, und 4 Bytes, also 32 Bits, formen
Bedienungsanleitung Programmiersoftware Save `n carry PLUS. Inhaltsangabe
 Bedienungsanleitung Programmiersoftware Save `n carry PLUS Mit der Programmiersoftware Save `n carry PLUS lassen sich für die Schaltcomputer SC 08 und SC 88; SC 98 einfach und schnell Schaltprogramme erstellen
Bedienungsanleitung Programmiersoftware Save `n carry PLUS Mit der Programmiersoftware Save `n carry PLUS lassen sich für die Schaltcomputer SC 08 und SC 88; SC 98 einfach und schnell Schaltprogramme erstellen
Mikroprozessor bzw. CPU (Central Processing. - Steuerwerk (Control Unit) - Rechenwerk bzw. ALU (Arithmetic Logic Unit)
 - Rechenwerk bzw. ALU (Arithmetic Logic Unit)") Der Demo-Computer besitzt einen 4Bit-Mikroprozessor. Er kann entsprechend Wörter mit einer Breite von 4 Bits in einem Schritt verarbeiten. Die einzelnen Schritte der Abarbeitung werden durch Lampen visualisiert.
Der Demo-Computer besitzt einen 4Bit-Mikroprozessor. Er kann entsprechend Wörter mit einer Breite von 4 Bits in einem Schritt verarbeiten. Die einzelnen Schritte der Abarbeitung werden durch Lampen visualisiert.
Local Control Network
 Netzspannungsüberwachung (Stromausfallerkennung) Die Aufgabe Nach einem Stromausfall soll der Status von Aktoren oder Funktionen wieder so hergestellt werden, wie er vor dem Stromausfall war. Die Netzspannungsüberwachung
Netzspannungsüberwachung (Stromausfallerkennung) Die Aufgabe Nach einem Stromausfall soll der Status von Aktoren oder Funktionen wieder so hergestellt werden, wie er vor dem Stromausfall war. Die Netzspannungsüberwachung
mit SD-Karte SD-Karte Inhalt
 mit mit Kartensteckplatz Der Logger ist optional mit einem Kartensteckplatz für eine micro erhältlich. Die verfügt über ein Vielfaches der Speicherkapazität des internen Logger- Speichers. Inhalt Zeitlicher
mit mit Kartensteckplatz Der Logger ist optional mit einem Kartensteckplatz für eine micro erhältlich. Die verfügt über ein Vielfaches der Speicherkapazität des internen Logger- Speichers. Inhalt Zeitlicher
Kap 4. 4 Die Mikroprogrammebene eines Rechners
 4 Die Mikroprogrammebene eines Rechners Das Abarbeiten eines Arbeitszyklus eines einzelnen Befehls besteht selbst wieder aus verschiedenen Schritten (Befehl holen, Befehl dekodieren, Operanden holen etc.).
4 Die Mikroprogrammebene eines Rechners Das Abarbeiten eines Arbeitszyklus eines einzelnen Befehls besteht selbst wieder aus verschiedenen Schritten (Befehl holen, Befehl dekodieren, Operanden holen etc.).
Dieser Ablauf soll eine Hilfe für die tägliche Arbeit mit der SMS Bestätigung im Millennium darstellen.
 Millennium SMS Service Schnellübersicht Seite 1 von 6 1. Tägliche Arbeiten mit der SMS Bestätigung Dieser Ablauf soll eine Hilfe für die tägliche Arbeit mit der SMS Bestätigung im Millennium darstellen.
Millennium SMS Service Schnellübersicht Seite 1 von 6 1. Tägliche Arbeiten mit der SMS Bestätigung Dieser Ablauf soll eine Hilfe für die tägliche Arbeit mit der SMS Bestätigung im Millennium darstellen.
Ein polyadisches Zahlensystem mit der Basis B ist ein Zahlensystem, in dem eine Zahl x nach Potenzen von B zerlegt wird.
 Zahlensysteme Definition: Ein polyadisches Zahlensystem mit der Basis B ist ein Zahlensystem, in dem eine Zahl x nach Potenzen von B zerlegt wird. In der Informatik spricht man auch von Stellenwertsystem,
Zahlensysteme Definition: Ein polyadisches Zahlensystem mit der Basis B ist ein Zahlensystem, in dem eine Zahl x nach Potenzen von B zerlegt wird. In der Informatik spricht man auch von Stellenwertsystem,
Bedienungsanleitung Version 1.0
 Botex DMX Operator (DC-1216) Bedienungsanleitung Version 1.0 - Inhalt - 1 KENNZEICHEN UND MERKMALE...4 2 TECHNISCHE ANGABEN...4 3 BEDIENUNG...4 3.1 ALLGEMEINES:...4 3.2 BEDIENUNG UND FUNKTIONEN...5 4 SZENEN
Botex DMX Operator (DC-1216) Bedienungsanleitung Version 1.0 - Inhalt - 1 KENNZEICHEN UND MERKMALE...4 2 TECHNISCHE ANGABEN...4 3 BEDIENUNG...4 3.1 ALLGEMEINES:...4 3.2 BEDIENUNG UND FUNKTIONEN...5 4 SZENEN
3.0 8051 Assembler und Hochsprachen
 3.0 8051 Assembler und Hochsprachen Eine kurze Übersicht zum Ablauf einer Programmierung eines 8051 Mikrocontrollers. 3.1 Der 8051 Maschinencode Grundsätzlich akzeptiert ein 8051 Mikrocontroller als Befehle
3.0 8051 Assembler und Hochsprachen Eine kurze Übersicht zum Ablauf einer Programmierung eines 8051 Mikrocontrollers. 3.1 Der 8051 Maschinencode Grundsätzlich akzeptiert ein 8051 Mikrocontroller als Befehle
Auslesen der Fahrtdaten wiederholen Schritt für Schritt erklärt (Funktion Abfrage zur Datensicherung erstellen )
") + twinline GmbH + Am Heidekrug 28 + D-16727 Velten Auslesen der Fahrtdaten wiederholen Schritt für Schritt erklärt (Funktion Abfrage zur Datensicherung erstellen ) Der gewöhnliche Auslesevorgang der aktuellen
+ twinline GmbH + Am Heidekrug 28 + D-16727 Velten Auslesen der Fahrtdaten wiederholen Schritt für Schritt erklärt (Funktion Abfrage zur Datensicherung erstellen ) Der gewöhnliche Auslesevorgang der aktuellen
"Memory Stick" zur Programmierung der comfort 8+ Lichtsteuranlage mit PC Software "scenes editor"
 comfort 8+ IRPC "Memory Stick" zur Programmierung der comfort 8+ Lichtsteuranlage mit PC Software "scenes editor" 1: Programmstart, Einstellungen 1.1 Zuerst die Software der beiliegenden CD-ROM auf einem
comfort 8+ IRPC "Memory Stick" zur Programmierung der comfort 8+ Lichtsteuranlage mit PC Software "scenes editor" 1: Programmstart, Einstellungen 1.1 Zuerst die Software der beiliegenden CD-ROM auf einem
Novell Client. Anleitung. zur Verfügung gestellt durch: ZID Dezentrale Systeme. Februar 2015. ZID Dezentrale Systeme
 Novell Client Anleitung zur Verfügung gestellt durch: ZID Dezentrale Systeme Februar 2015 Seite 2 von 8 Mit der Einführung von Windows 7 hat sich die Novell-Anmeldung sehr stark verändert. Der Novell Client
Novell Client Anleitung zur Verfügung gestellt durch: ZID Dezentrale Systeme Februar 2015 Seite 2 von 8 Mit der Einführung von Windows 7 hat sich die Novell-Anmeldung sehr stark verändert. Der Novell Client
SharePoint Demonstration
 SharePoint Demonstration Was zeigt die Demonstration? Diese Demonstration soll den modernen Zugriff auf Daten und Informationen veranschaulichen und zeigen welche Vorteile sich dadurch in der Zusammenarbeit
SharePoint Demonstration Was zeigt die Demonstration? Diese Demonstration soll den modernen Zugriff auf Daten und Informationen veranschaulichen und zeigen welche Vorteile sich dadurch in der Zusammenarbeit
Jede Zahl muss dabei einzeln umgerechnet werden. Beginnen wir also ganz am Anfang mit der Zahl,192.
 Binäres und dezimales Zahlensystem Ziel In diesem ersten Schritt geht es darum, die grundlegende Umrechnung aus dem Dezimalsystem in das Binärsystem zu verstehen. Zusätzlich wird auch die andere Richtung,
Binäres und dezimales Zahlensystem Ziel In diesem ersten Schritt geht es darum, die grundlegende Umrechnung aus dem Dezimalsystem in das Binärsystem zu verstehen. Zusätzlich wird auch die andere Richtung,
Inhalt. 1 Einleitung AUTOMATISCHE DATENSICHERUNG AUF EINEN CLOUDSPEICHER
 AUTOMATISCHE DATENSICHERUNG AUF EINEN CLOUDSPEICHER Inhalt 1 Einleitung... 1 2 Einrichtung der Aufgabe für die automatische Sicherung... 2 2.1 Die Aufgabenplanung... 2 2.2 Der erste Testlauf... 9 3 Problembehebung...
AUTOMATISCHE DATENSICHERUNG AUF EINEN CLOUDSPEICHER Inhalt 1 Einleitung... 1 2 Einrichtung der Aufgabe für die automatische Sicherung... 2 2.1 Die Aufgabenplanung... 2 2.2 Der erste Testlauf... 9 3 Problembehebung...
Programmierung von ATMEL AVR Mikroprozessoren am Beispiel des ATtiny13. Teil IV: Programmieren an Beispielen
 Programmierung von ATMEL AVR Mikroprozessoren am Beispiel des ATtiny13 Eine Einführung in Aufbau, Funktionsweise, Programmierung und Nutzen von Mikroprozessoren Teil IV: Programmieren an Beispielen Die
Programmierung von ATMEL AVR Mikroprozessoren am Beispiel des ATtiny13 Eine Einführung in Aufbau, Funktionsweise, Programmierung und Nutzen von Mikroprozessoren Teil IV: Programmieren an Beispielen Die
Anwendungsbeispiele Buchhaltung
 Rechnungen erstellen mit Webling Webling ist ein Produkt der Firma: Inhaltsverzeichnis 1 Rechnungen erstellen mit Webling 1.1 Rechnung erstellen und ausdrucken 1.2 Rechnung mit Einzahlungsschein erstellen
Rechnungen erstellen mit Webling Webling ist ein Produkt der Firma: Inhaltsverzeichnis 1 Rechnungen erstellen mit Webling 1.1 Rechnung erstellen und ausdrucken 1.2 Rechnung mit Einzahlungsschein erstellen
Anleitung über den Umgang mit Schildern
 Anleitung über den Umgang mit Schildern -Vorwort -Wo bekommt man Schilder? -Wo und wie speichert man die Schilder? -Wie füge ich die Schilder in meinen Track ein? -Welche Bauteile kann man noch für Schilder
Anleitung über den Umgang mit Schildern -Vorwort -Wo bekommt man Schilder? -Wo und wie speichert man die Schilder? -Wie füge ich die Schilder in meinen Track ein? -Welche Bauteile kann man noch für Schilder
Lehrer: Einschreibemethoden
 Lehrer: Einschreibemethoden Einschreibemethoden Für die Einschreibung in Ihren Kurs gibt es unterschiedliche Methoden. Sie können die Schüler über die Liste eingeschriebene Nutzer Ihrem Kurs zuweisen oder
Lehrer: Einschreibemethoden Einschreibemethoden Für die Einschreibung in Ihren Kurs gibt es unterschiedliche Methoden. Sie können die Schüler über die Liste eingeschriebene Nutzer Ihrem Kurs zuweisen oder
TeamSpeak3 Einrichten
 TeamSpeak3 Einrichten Version 1.0.3 24. April 2012 StreamPlus UG Es ist untersagt dieses Dokument ohne eine schriftliche Genehmigung der StreamPlus UG vollständig oder auszugsweise zu reproduzieren, vervielfältigen
TeamSpeak3 Einrichten Version 1.0.3 24. April 2012 StreamPlus UG Es ist untersagt dieses Dokument ohne eine schriftliche Genehmigung der StreamPlus UG vollständig oder auszugsweise zu reproduzieren, vervielfältigen
Agentur für Werbung & Internet. Schritt für Schritt: Newsletter mit WebEdition versenden
 Agentur für Werbung & Internet Schritt für Schritt: Newsletter mit WebEdition versenden E-Mail-Adresse im Control Panel einrichten Inhalt Vorwort 3 Einstellungen im Reiter «Eigenschaften» 4 Einstellungen
Agentur für Werbung & Internet Schritt für Schritt: Newsletter mit WebEdition versenden E-Mail-Adresse im Control Panel einrichten Inhalt Vorwort 3 Einstellungen im Reiter «Eigenschaften» 4 Einstellungen
Virtueller Seminarordner Anleitung für die Dozentinnen und Dozenten
 Virtueller Seminarordner Anleitung für die Dozentinnen und Dozenten In dem Virtuellen Seminarordner werden für die Teilnehmerinnen und Teilnehmer des Seminars alle für das Seminar wichtigen Informationen,
Virtueller Seminarordner Anleitung für die Dozentinnen und Dozenten In dem Virtuellen Seminarordner werden für die Teilnehmerinnen und Teilnehmer des Seminars alle für das Seminar wichtigen Informationen,
Sich einen eigenen Blog anzulegen, ist gar nicht so schwer. Es gibt verschiedene Anbieter. www.blogger.com ist einer davon.
 www.blogger.com Sich einen eigenen Blog anzulegen, ist gar nicht so schwer. Es gibt verschiedene Anbieter. www.blogger.com ist einer davon. Sie müssen sich dort nur ein Konto anlegen. Dafür gehen Sie auf
www.blogger.com Sich einen eigenen Blog anzulegen, ist gar nicht so schwer. Es gibt verschiedene Anbieter. www.blogger.com ist einer davon. Sie müssen sich dort nur ein Konto anlegen. Dafür gehen Sie auf
Windows 10. Vortrag am Fleckenherbst Bürgertreff Neuhausen. www.buergertreff-neuhausen.de www.facebook.com/buergertreffneuhausen
 Windows 10 Vortrag am Fleckenherbst Bürgertreff Neuhausen 1 Inhalt Was ist neu (im Vergleich zu Windows 8.1) Wann lohnt sich ein Umstieg Update Installation von Windows 10 Startmenü Windows Explorer Webbrowser
Windows 10 Vortrag am Fleckenherbst Bürgertreff Neuhausen 1 Inhalt Was ist neu (im Vergleich zu Windows 8.1) Wann lohnt sich ein Umstieg Update Installation von Windows 10 Startmenü Windows Explorer Webbrowser
Tutorial - www.root13.de
 Tutorial - www.root13.de Netzwerk unter Linux einrichten (SuSE 7.0 oder höher) Inhaltsverzeichnis: - Netzwerk einrichten - Apache einrichten - einfaches FTP einrichten - GRUB einrichten Seite 1 Netzwerk
Tutorial - www.root13.de Netzwerk unter Linux einrichten (SuSE 7.0 oder höher) Inhaltsverzeichnis: - Netzwerk einrichten - Apache einrichten - einfaches FTP einrichten - GRUB einrichten Seite 1 Netzwerk
Was Sie bald kennen und können
 Den Rechner verwenden 6 Heutzutage gehört auf jeden Schreibtisch auch ein Taschenrechner denn wer vertraut im Computer-Zeitalter noch seinen eigenen Rechenkünsten? Und da Microsoft mit Windows die Vision
Den Rechner verwenden 6 Heutzutage gehört auf jeden Schreibtisch auch ein Taschenrechner denn wer vertraut im Computer-Zeitalter noch seinen eigenen Rechenkünsten? Und da Microsoft mit Windows die Vision
Ihren Kundendienst effektiver machen
 Ihren Kundendienst effektiver machen Wenn Sie einen neuen Kundendienstauftrag per Handy an Ihrem Monteur senden mag das ja funktionieren, aber hat Ihr Kunde nicht schon darüber gemeckert? Muss der Kunde
Ihren Kundendienst effektiver machen Wenn Sie einen neuen Kundendienstauftrag per Handy an Ihrem Monteur senden mag das ja funktionieren, aber hat Ihr Kunde nicht schon darüber gemeckert? Muss der Kunde
Zur Einrichtung der orgamax Cloud auf Ihrem ipad beschreiben wir hier die Vorgehensweise.
 Einrichtung Ihrer orgamax Cloud auf dem ipad Zur Einrichtung der orgamax Cloud auf Ihrem ipad beschreiben wir hier die Vorgehensweise. Folgen Sie bitte genau den hier gezeigten Schritten und achten Sie
Einrichtung Ihrer orgamax Cloud auf dem ipad Zur Einrichtung der orgamax Cloud auf Ihrem ipad beschreiben wir hier die Vorgehensweise. Folgen Sie bitte genau den hier gezeigten Schritten und achten Sie
schnell und portofrei erhältlich bei beck-shop.de DIE FACHBUCHHANDLUNG mitp/bhv
 Roboter programmieren mit NXC für Lego Mindstorms NXT 1. Auflage Roboter programmieren mit NXC für Lego Mindstorms NXT schnell und portofrei erhältlich bei beck-shop.de DIE FACHBUCHHANDLUNG mitp/bhv Verlag
Roboter programmieren mit NXC für Lego Mindstorms NXT 1. Auflage Roboter programmieren mit NXC für Lego Mindstorms NXT schnell und portofrei erhältlich bei beck-shop.de DIE FACHBUCHHANDLUNG mitp/bhv Verlag
Einrichten einer Festplatte mit FDISK unter Windows 95/98/98SE/Me
 Einrichten einer Festplatte mit FDISK unter Windows 95/98/98SE/Me Bevor Sie die Platte zum ersten Mal benutzen können, muss sie noch partitioniert und formatiert werden! Vorher zeigt sich die Festplatte
Einrichten einer Festplatte mit FDISK unter Windows 95/98/98SE/Me Bevor Sie die Platte zum ersten Mal benutzen können, muss sie noch partitioniert und formatiert werden! Vorher zeigt sich die Festplatte
INTERNET UND MMS MIT DEM QTEK2020 MARCO WYRSCH @ 28. MÄRZ 04
 POCKETPC.CH INTERNET UND MMS MIT DEM QTEK2020 MARCO WYRSCH @ 28. MÄRZ 04 VORAUSSETZUNG QTEK2020 DEUTSCH. DIE ANLEITUNG IST MIT DEN ORANGE EINSTELLUNGEN GESCHRIEBEN WORDEN DIE EINSTELLUNGEN FÜR SWISSCOM
POCKETPC.CH INTERNET UND MMS MIT DEM QTEK2020 MARCO WYRSCH @ 28. MÄRZ 04 VORAUSSETZUNG QTEK2020 DEUTSCH. DIE ANLEITUNG IST MIT DEN ORANGE EINSTELLUNGEN GESCHRIEBEN WORDEN DIE EINSTELLUNGEN FÜR SWISSCOM
Persönliches Adressbuch
 Persönliches Adressbuch Persönliches Adressbuch Seite 1 Persönliches Adressbuch Seite 2 Inhaltsverzeichnis 1. WICHTIGE INFORMATIONEN ZUR BEDIENUNG VON CUMULUS 4 2. ALLGEMEINE INFORMATIONEN ZUM PERSÖNLICHEN
Persönliches Adressbuch Persönliches Adressbuch Seite 1 Persönliches Adressbuch Seite 2 Inhaltsverzeichnis 1. WICHTIGE INFORMATIONEN ZUR BEDIENUNG VON CUMULUS 4 2. ALLGEMEINE INFORMATIONEN ZUM PERSÖNLICHEN
malistor Phone ist für Kunden mit gültigem Servicevertrag kostenlos.
 malistor Phone malistor Phone ist die ideale Ergänzung zu Ihrer Malersoftware malistor. Mit malistor Phone haben Sie Ihre Adressen und Dokumente (Angebote, Aufträge, Rechnungen) aus malistor immer dabei.
malistor Phone malistor Phone ist die ideale Ergänzung zu Ihrer Malersoftware malistor. Mit malistor Phone haben Sie Ihre Adressen und Dokumente (Angebote, Aufträge, Rechnungen) aus malistor immer dabei.
Mediumwechsel - VR-NetWorld Software
 Mediumwechsel - VR-NetWorld Software Die personalisierte VR-NetWorld-Card wird mit einem festen Laufzeitende ausgeliefert. Am Ende der Laufzeit müssen Sie die bestehende VR-NetWorld-Card gegen eine neue
Mediumwechsel - VR-NetWorld Software Die personalisierte VR-NetWorld-Card wird mit einem festen Laufzeitende ausgeliefert. Am Ende der Laufzeit müssen Sie die bestehende VR-NetWorld-Card gegen eine neue
AGROPLUS Buchhaltung. Daten-Server und Sicherheitskopie. Version vom 21.10.2013b
 AGROPLUS Buchhaltung Daten-Server und Sicherheitskopie Version vom 21.10.2013b 3a) Der Daten-Server Modus und der Tresor Der Daten-Server ist eine Betriebsart welche dem Nutzer eine grosse Flexibilität
AGROPLUS Buchhaltung Daten-Server und Sicherheitskopie Version vom 21.10.2013b 3a) Der Daten-Server Modus und der Tresor Der Daten-Server ist eine Betriebsart welche dem Nutzer eine grosse Flexibilität
Einrichten des Elektronischen Postfachs
 Einrichten des Elektronischen Postfachs Für die Einrichtung des Elektronischen Postfachs melden Sie sich wie gewohnt in unserem Online-Banking auf www.sparkasse-unnakamen.de an. Wechseln Sie über Postfach
Einrichten des Elektronischen Postfachs Für die Einrichtung des Elektronischen Postfachs melden Sie sich wie gewohnt in unserem Online-Banking auf www.sparkasse-unnakamen.de an. Wechseln Sie über Postfach
Upgrade von Windows Vista auf Windows 7
 Je nach Ihrer Hardware und der aktuellen Edition von Windows Vista können Sie die Option Upgrade bei der Installation von Windows 7 verwenden, um ein Upgrade von Windows Vista auf die entsprechende oder
Je nach Ihrer Hardware und der aktuellen Edition von Windows Vista können Sie die Option Upgrade bei der Installation von Windows 7 verwenden, um ein Upgrade von Windows Vista auf die entsprechende oder
Überprüfung der digital signierten E-Rechnung
 Überprüfung der digital signierten E-Rechnung Aufgrund des BMF-Erlasses vom Juli 2005 (BMF-010219/0183-IV/9/2005) gelten ab 01.01.2006 nur noch jene elektronischen Rechnungen als vorsteuerabzugspflichtig,
Überprüfung der digital signierten E-Rechnung Aufgrund des BMF-Erlasses vom Juli 2005 (BMF-010219/0183-IV/9/2005) gelten ab 01.01.2006 nur noch jene elektronischen Rechnungen als vorsteuerabzugspflichtig,
1 Aufgaben zu Wie funktioniert ein Computer?
 71 1 Aufgaben zu Wie funktioniert ein Computer? Netzteil a) Welche Spannungen werden von PC-Netzteilen bereitgestellt? 3.3 V, 5 V, 12 V, -5 V, -12 V. b) Warum können PC-Netzteile hohe Leistungen liefern,
71 1 Aufgaben zu Wie funktioniert ein Computer? Netzteil a) Welche Spannungen werden von PC-Netzteilen bereitgestellt? 3.3 V, 5 V, 12 V, -5 V, -12 V. b) Warum können PC-Netzteile hohe Leistungen liefern,
Übungsaufgaben. - Vorgehensweise entsprechend dem Algorithmus der schriftlichen Multiplikation
 Übungsaufgaben Anmerkung Allen Beispielen soll noch hinzugefügt sein, dass wertvolle Hinweise, also die Tipps und Tricks die der schnellen maschinellen Multiplikation zu Grunde liegen, neben dem toff zur
Übungsaufgaben Anmerkung Allen Beispielen soll noch hinzugefügt sein, dass wertvolle Hinweise, also die Tipps und Tricks die der schnellen maschinellen Multiplikation zu Grunde liegen, neben dem toff zur
Dokumentation zum Spielserver der Software Challenge
 Dokumentation zum Spielserver der Software Challenge 10.08.2011 Inhaltsverzeichnis: Programmoberfläche... 2 Ein neues Spiel erstellen... 2 Spielfeldoberfläche... 4 Spielwiederholung laden... 5 Testdurchläufe...
Dokumentation zum Spielserver der Software Challenge 10.08.2011 Inhaltsverzeichnis: Programmoberfläche... 2 Ein neues Spiel erstellen... 2 Spielfeldoberfläche... 4 Spielwiederholung laden... 5 Testdurchläufe...
Launchpad Mini. Überblick. Vielen Dank, dass Sie sich für unseren kompaktesten Launchpad Grid-Controller entschieden haben.
 Kurzanleitung Überblick Launchpad Mini Vielen Dank, dass Sie sich für unseren kompaktesten Launchpad Grid-Controller entschieden haben. Er mag zwar äußerlich klein wirken, aber über seine 64 Pads können
Kurzanleitung Überblick Launchpad Mini Vielen Dank, dass Sie sich für unseren kompaktesten Launchpad Grid-Controller entschieden haben. Er mag zwar äußerlich klein wirken, aber über seine 64 Pads können
5.1.4.4 Übung - Datenmigration in Windows 7
 5.0 5.1.4.4 Übung - Datenmigration in Windows 7 Einführung Drucken Sie die Übung aus und führen Sie sie durch. In dieser Übung verwenden Sie Windows 7. Empfohlene Ausstattung Die folgende Ausstattung ist
5.0 5.1.4.4 Übung - Datenmigration in Windows 7 Einführung Drucken Sie die Übung aus und führen Sie sie durch. In dieser Übung verwenden Sie Windows 7. Empfohlene Ausstattung Die folgende Ausstattung ist
Übungen zu C++ Kapitel 1
 Übungen zu C++ Kapitel 1 Aufgabe 1 Ergänze den Text. a) Die sechs logischen Einheiten eines Computers sind Eingabe-Einheit, Ausgabe-Einheit, RAM, ALU, CPU, Plattenspeicher. b) Die Programme, welche Hochsprachenprogramme
Übungen zu C++ Kapitel 1 Aufgabe 1 Ergänze den Text. a) Die sechs logischen Einheiten eines Computers sind Eingabe-Einheit, Ausgabe-Einheit, RAM, ALU, CPU, Plattenspeicher. b) Die Programme, welche Hochsprachenprogramme
Handbuch B4000+ Preset Manager
 Handbuch B4000+ Preset Manager B4000+ authentic organ modeller Version 0.6 FERROFISH advanced audio applications Einleitung Mit der Software B4000+ Preset Manager können Sie Ihre in der B4000+ erstellten
Handbuch B4000+ Preset Manager B4000+ authentic organ modeller Version 0.6 FERROFISH advanced audio applications Einleitung Mit der Software B4000+ Preset Manager können Sie Ihre in der B4000+ erstellten
Auto-Provisionierung tiptel 30x0 mit Yeastar MyPBX
 Allgemeines Auto-Provisionierung tiptel 30x0 mit Yeastar MyPBX Stand 21.11.2014 Die Yeastar MyPBX Telefonanlagen unterstützen die automatische Konfiguration der tiptel 3010, tiptel 3020 und tiptel 3030
Allgemeines Auto-Provisionierung tiptel 30x0 mit Yeastar MyPBX Stand 21.11.2014 Die Yeastar MyPBX Telefonanlagen unterstützen die automatische Konfiguration der tiptel 3010, tiptel 3020 und tiptel 3030
ARCO Software - Anleitung zur Umstellung der MWSt
 ARCO Software - Anleitung zur Umstellung der MWSt Wieder einmal beschert uns die Bundesverwaltung auf Ende Jahr mit zusätzlicher Arbeit, statt mit den immer wieder versprochenen Erleichterungen für KMU.
ARCO Software - Anleitung zur Umstellung der MWSt Wieder einmal beschert uns die Bundesverwaltung auf Ende Jahr mit zusätzlicher Arbeit, statt mit den immer wieder versprochenen Erleichterungen für KMU.
Grundlagen der Informatik (BSc) Übung Nr. 5
 Übung Nr. 5") Übung Nr. 5: Zahlensysteme und ihre Anwendung Bitte kreuzen Sie in der folgenden Auflistung alle Zahlensysteme an, zu welchen jeder Ausdruck als Zahl gehören kann! (Verwenden Sie 'x für Wahl, ' ' für Ausschluß
Übung Nr. 5: Zahlensysteme und ihre Anwendung Bitte kreuzen Sie in der folgenden Auflistung alle Zahlensysteme an, zu welchen jeder Ausdruck als Zahl gehören kann! (Verwenden Sie 'x für Wahl, ' ' für Ausschluß
Kurzanleitung /Kompalitätstest Barcode. Sie haben zwei Möglichkeiten unsere Barcode/Strichcodes für Ihren eigenen stationären Einzelhandel zu nutzen.
 Kurzanleitung /Kompalitätstest Barcode Bitte drucken Sie diese Anleitung aus. Sie haben zwei Möglichkeiten unsere Barcode/Strichcodes für Ihren eigenen stationären Einzelhandel zu nutzen. 1. Möglichkeit
Kurzanleitung /Kompalitätstest Barcode Bitte drucken Sie diese Anleitung aus. Sie haben zwei Möglichkeiten unsere Barcode/Strichcodes für Ihren eigenen stationären Einzelhandel zu nutzen. 1. Möglichkeit
Tageslichtsimulator Easy Time Controll. Bedienungsanleitung
 Tageslichtsimulator Easy Time Controll Bedienungsanleitung Mit unserem frei programmierbaren Tageslichsimulator Easy Time Controll halten Sie nun ein Gerät in Händen, mit welchem Sie ihre Aquarium-/Terrarium
Tageslichtsimulator Easy Time Controll Bedienungsanleitung Mit unserem frei programmierbaren Tageslichsimulator Easy Time Controll halten Sie nun ein Gerät in Händen, mit welchem Sie ihre Aquarium-/Terrarium
Hier ist die Anleitung zum Flashen des MTK GPS auf der APM 2.0. Prinzipiell funktioniert es auch auf der APM 2.5 und APM 1.
 Hier ist die Anleitung zum Flashen des MTK GPS auf der APM 2.0. Prinzipiell funktioniert es auch auf der APM 2.5 und APM 1. Vorweg: Die neue MTK Firmware 1.9 (AXN1.51_2776_3329_384.1151100.5_v19.bin) ist
Hier ist die Anleitung zum Flashen des MTK GPS auf der APM 2.0. Prinzipiell funktioniert es auch auf der APM 2.5 und APM 1. Vorweg: Die neue MTK Firmware 1.9 (AXN1.51_2776_3329_384.1151100.5_v19.bin) ist
DB2 Kurzeinführung (Windows)
") DB2 Kurzeinführung (Windows) Michaelsen c 25. Mai 2010 1 1 Komponenten von DB2 DB2 bietet zahlreiche graphische Oberflächen für die Verwaltung der verschiedenen Komponenten und Anwendungen. Die wichtigsten
DB2 Kurzeinführung (Windows) Michaelsen c 25. Mai 2010 1 1 Komponenten von DB2 DB2 bietet zahlreiche graphische Oberflächen für die Verwaltung der verschiedenen Komponenten und Anwendungen. Die wichtigsten
Binäre Bäume. 1. Allgemeines. 2. Funktionsweise. 2.1 Eintragen
 Binäre Bäume 1. Allgemeines Binäre Bäume werden grundsätzlich verwendet, um Zahlen der Größe nach, oder Wörter dem Alphabet nach zu sortieren. Dem einfacheren Verständnis zu Liebe werde ich mich hier besonders
Binäre Bäume 1. Allgemeines Binäre Bäume werden grundsätzlich verwendet, um Zahlen der Größe nach, oder Wörter dem Alphabet nach zu sortieren. Dem einfacheren Verständnis zu Liebe werde ich mich hier besonders
S7-Hantierungsbausteine für R355, R6000 und R2700
 S7-Hantierungsbausteine für R355, R6000 und R2700 1. FB90, Zyklus_R/W Dieser Baustein dient zur zentralen Kommunikation zwischen Anwenderprogramm und dem Modul R355 sowie den Geräten R6000 und R2700 über
S7-Hantierungsbausteine für R355, R6000 und R2700 1. FB90, Zyklus_R/W Dieser Baustein dient zur zentralen Kommunikation zwischen Anwenderprogramm und dem Modul R355 sowie den Geräten R6000 und R2700 über
Datensicherung. Beschreibung der Datensicherung
 Datensicherung Mit dem Datensicherungsprogramm können Sie Ihre persönlichen Daten problemlos Sichern. Es ist möglich eine komplette Datensicherung durchzuführen, aber auch nur die neuen und geänderten
Datensicherung Mit dem Datensicherungsprogramm können Sie Ihre persönlichen Daten problemlos Sichern. Es ist möglich eine komplette Datensicherung durchzuführen, aber auch nur die neuen und geänderten
Leitfaden zur Nutzung des System CryptShare
 Leitfaden zur Nutzung des System CryptShare 1. Funktionsweise und Sicherheit 1.1 Funktionen Die Web-Anwendung CryptShare ermöglicht den einfachen und sicheren Austausch vertraulicher Informationen. Von
Leitfaden zur Nutzung des System CryptShare 1. Funktionsweise und Sicherheit 1.1 Funktionen Die Web-Anwendung CryptShare ermöglicht den einfachen und sicheren Austausch vertraulicher Informationen. Von
CU-R-CONTROL. Beschreibung zur Schaltung ATMega16-32+ISP MC-Controller Steuerung auf Basis ATMEL Mega16/32. Autor: Christian Ulrich
 Seite 1 von 10 CU-R-CONTROL Beschreibung zur Schaltung ATMega16-32+ISP MC-Controller Steuerung auf Basis ATMEL Mega16/32 Autor: Christian Ulrich Datum: 08.12.2007 Version: 1.00 Seite 2 von 10 Inhalt Historie
Seite 1 von 10 CU-R-CONTROL Beschreibung zur Schaltung ATMega16-32+ISP MC-Controller Steuerung auf Basis ATMEL Mega16/32 Autor: Christian Ulrich Datum: 08.12.2007 Version: 1.00 Seite 2 von 10 Inhalt Historie
Local Control Network Technische Dokumentation
 Steuerung von Hifi-Anlagen mit der LCN-GVS Häufig wird der Wunsch geäußert, eine Hi-Fi-Anlage in die Steuerung der LCN-GVS einzubinden. Auch das ist realisierbar. Für die hier gezeigte Lösung müssen wenige
Steuerung von Hifi-Anlagen mit der LCN-GVS Häufig wird der Wunsch geäußert, eine Hi-Fi-Anlage in die Steuerung der LCN-GVS einzubinden. Auch das ist realisierbar. Für die hier gezeigte Lösung müssen wenige
Er musste so eingerichtet werden, dass das D-Laufwerk auf das E-Laufwerk gespiegelt
 Inhaltsverzeichnis Aufgabe... 1 Allgemein... 1 Active Directory... 1 Konfiguration... 2 Benutzer erstellen... 3 Eigenes Verzeichnis erstellen... 3 Benutzerkonto erstellen... 3 Profil einrichten... 5 Berechtigungen
Inhaltsverzeichnis Aufgabe... 1 Allgemein... 1 Active Directory... 1 Konfiguration... 2 Benutzer erstellen... 3 Eigenes Verzeichnis erstellen... 3 Benutzerkonto erstellen... 3 Profil einrichten... 5 Berechtigungen
Visual Basic Express Debugging
 Inhalt Dokument Beschreibung... 1 Projekt vorbereiten... 1 Verknüpfung zu Autocad/ProStructures einstellen... 2 Debugging... 4 Autocad/ProSteel Beispiel... 5 Dokument Beschreibung Debuggen nennt man das
Inhalt Dokument Beschreibung... 1 Projekt vorbereiten... 1 Verknüpfung zu Autocad/ProStructures einstellen... 2 Debugging... 4 Autocad/ProSteel Beispiel... 5 Dokument Beschreibung Debuggen nennt man das
YouTube: Video-Untertitel übersetzen
 Der Easytrans24.com-Ratgeber YouTube: Video-Untertitel übersetzen Wie Sie mit Hilfe von Easytrans24.com in wenigen Schritten Untertitel für Ihre YouTube- Videos in mehrere Sprachen übersetzen lassen können.
Der Easytrans24.com-Ratgeber YouTube: Video-Untertitel übersetzen Wie Sie mit Hilfe von Easytrans24.com in wenigen Schritten Untertitel für Ihre YouTube- Videos in mehrere Sprachen übersetzen lassen können.
Installation eblvd (Fernwartung)
") Installation eblvd (Fernwartung) Anleitung zur Installation des eblvd Remote Desktop für die Fernwartung Die bisher eingesetzte Fernwartungssoftware Netviewer wird bei der Firma Cardis Reynolds in Kürze
Installation eblvd (Fernwartung) Anleitung zur Installation des eblvd Remote Desktop für die Fernwartung Die bisher eingesetzte Fernwartungssoftware Netviewer wird bei der Firma Cardis Reynolds in Kürze
Stepperfocuser 2.0 mit Bootloader
 Stepperfocuser 2.0 mit Bootloader Info Für den Stepperfocuser 2.0 gibt es einen Bootloader. Dieser ermöglicht es, die Firmware zu aktualisieren ohne dass man ein spezielles Programmiergerät benötigt. Die
Stepperfocuser 2.0 mit Bootloader Info Für den Stepperfocuser 2.0 gibt es einen Bootloader. Dieser ermöglicht es, die Firmware zu aktualisieren ohne dass man ein spezielles Programmiergerät benötigt. Die
teischl.com Software Design & Services e.u. office@teischl.com www.teischl.com/booknkeep www.facebook.com/booknkeep
 teischl.com Software Design & Services e.u. office@teischl.com www.teischl.com/booknkeep www.facebook.com/booknkeep 1. Erstellen Sie ein neues Rechnungsformular Mit book n keep können Sie nun Ihre eigenen
teischl.com Software Design & Services e.u. office@teischl.com www.teischl.com/booknkeep www.facebook.com/booknkeep 1. Erstellen Sie ein neues Rechnungsformular Mit book n keep können Sie nun Ihre eigenen
GeoPilot (Android) die App
 die App") GeoPilot (Android) die App Mit der neuen Rademacher GeoPilot App machen Sie Ihr Android Smartphone zum Sensor und steuern beliebige Szenen über den HomePilot. Die App beinhaltet zwei Funktionen, zum einen
GeoPilot (Android) die App Mit der neuen Rademacher GeoPilot App machen Sie Ihr Android Smartphone zum Sensor und steuern beliebige Szenen über den HomePilot. Die App beinhaltet zwei Funktionen, zum einen
Wie man Registrationen und Styles von Style/Registration Floppy Disketten auf die TYROS-Festplatte kopieren kann.
 Wie man Registrationen und Styles von Style/Registration Floppy Disketten auf die TYROS-Festplatte kopieren kann. Einleitung Es kommt vor, dass im Handel Disketten angeboten werden, die Styles und Registrationen
Wie man Registrationen und Styles von Style/Registration Floppy Disketten auf die TYROS-Festplatte kopieren kann. Einleitung Es kommt vor, dass im Handel Disketten angeboten werden, die Styles und Registrationen
Handbuch für Easy Mail in Leicht Lesen
 Handbuch für Easy Mail in Leicht Lesen Easy Mail ist ein Englisches Wort und heißt: Einfaches Mail. Easy Mail spricht man so aus: isi mäl Seite 1 Inhaltsverzeichnis Teil 1: Wie lese ich ein E-Mail?...
Handbuch für Easy Mail in Leicht Lesen Easy Mail ist ein Englisches Wort und heißt: Einfaches Mail. Easy Mail spricht man so aus: isi mäl Seite 1 Inhaltsverzeichnis Teil 1: Wie lese ich ein E-Mail?...
FuxMedia Programm im Netzwerk einrichten am Beispiel von Windows 7
 FuxMedia Programm im Netzwerk einrichten am Beispiel von Windows 7 Die Installation der FuxMedia Software erfolgt erst NACH Einrichtung des Netzlaufwerks! Menüleiste einblenden, falls nicht vorhanden Die
FuxMedia Programm im Netzwerk einrichten am Beispiel von Windows 7 Die Installation der FuxMedia Software erfolgt erst NACH Einrichtung des Netzlaufwerks! Menüleiste einblenden, falls nicht vorhanden Die
Theoretische Informatik SS 04 Übung 1
 Theoretische Informatik SS 04 Übung 1 Aufgabe 1 Es gibt verschiedene Möglichkeiten, eine natürliche Zahl n zu codieren. In der unären Codierung hat man nur ein Alphabet mit einem Zeichen - sagen wir die
Theoretische Informatik SS 04 Übung 1 Aufgabe 1 Es gibt verschiedene Möglichkeiten, eine natürliche Zahl n zu codieren. In der unären Codierung hat man nur ein Alphabet mit einem Zeichen - sagen wir die
Kurzanleitung fu r Clubbeauftragte zur Pflege der Mitgliederdaten im Mitgliederbereich
 Kurzanleitung fu r Clubbeauftragte zur Pflege der Mitgliederdaten im Mitgliederbereich Mitgliederbereich (Version 1.0) Bitte loggen Sie sich in den Mitgliederbereich mit den Ihnen bekannten Zugangsdaten
Kurzanleitung fu r Clubbeauftragte zur Pflege der Mitgliederdaten im Mitgliederbereich Mitgliederbereich (Version 1.0) Bitte loggen Sie sich in den Mitgliederbereich mit den Ihnen bekannten Zugangsdaten
Schulberichtssystem. Inhaltsverzeichnis
 Schulberichtssystem Inhaltsverzeichnis 1. Erfassen der Schüler im SBS...2 2. Erzeugen der Export-Datei im SBS...3 3. Die SBS-Datei ins FuxMedia-Programm einlesen...4 4. Daten von FuxMedia ins SBS übertragen...6
Schulberichtssystem Inhaltsverzeichnis 1. Erfassen der Schüler im SBS...2 2. Erzeugen der Export-Datei im SBS...3 3. Die SBS-Datei ins FuxMedia-Programm einlesen...4 4. Daten von FuxMedia ins SBS übertragen...6
Electronic Systems GmbH & Co. KG
 Anleitung zum Anlegen eines IMAP E-Mail Kontos Bevor die detaillierte Anleitung für die Erstellung eines IMAP E-Mail Kontos folgt, soll zuerst eingestellt werden, wie oft E-Mail abgerufen werden sollen.
Anleitung zum Anlegen eines IMAP E-Mail Kontos Bevor die detaillierte Anleitung für die Erstellung eines IMAP E-Mail Kontos folgt, soll zuerst eingestellt werden, wie oft E-Mail abgerufen werden sollen.
Aufklappelemente anlegen
 Aufklappelemente anlegen Dieses Dokument beschreibt die grundsätzliche Erstellung der Aufklappelemente in der mittleren und rechten Spalte. Login Melden Sie sich an der jeweiligen Website an, in dem Sie
Aufklappelemente anlegen Dieses Dokument beschreibt die grundsätzliche Erstellung der Aufklappelemente in der mittleren und rechten Spalte. Login Melden Sie sich an der jeweiligen Website an, in dem Sie
Informationen zur Bedienung des Anrufbeantworters
 Informationen zur Bedienung des Anrufbeantworters - Die neue Telefonanlage der Firma Siemens stellt für die Anrufbeantworter- und Faxfunktion einen eigenen Server (Produktname: Xpressions) bereit. - Über
Informationen zur Bedienung des Anrufbeantworters - Die neue Telefonanlage der Firma Siemens stellt für die Anrufbeantworter- und Faxfunktion einen eigenen Server (Produktname: Xpressions) bereit. - Über
Installation LehrerConsole (für Version 6.2)
") Dr. Kaiser Systemhaus GmbH Köpenicker Straße 325 12555 Berlin Telefon: (0 30) 65 76 22 36 Telefax: (0 30) 65 76 22 38 E-Mail: info@dr-kaiser.de Internet: www.dr-kaiser.de Installation LehrerConsole (für
Dr. Kaiser Systemhaus GmbH Köpenicker Straße 325 12555 Berlin Telefon: (0 30) 65 76 22 36 Telefax: (0 30) 65 76 22 38 E-Mail: info@dr-kaiser.de Internet: www.dr-kaiser.de Installation LehrerConsole (für
Dokumentenverwaltung im Internet
 Dokumentenverwaltung im Internet WS 09/10 mit: Thema: Workflow und Rollenverteilung im Backend Gruppe: DVI 10 Patrick Plaum und Kay Hofmann Inhalt 1. Benutzer und Benutzergruppen erstellen...2 1.1. Benutzergruppen...2
Dokumentenverwaltung im Internet WS 09/10 mit: Thema: Workflow und Rollenverteilung im Backend Gruppe: DVI 10 Patrick Plaum und Kay Hofmann Inhalt 1. Benutzer und Benutzergruppen erstellen...2 1.1. Benutzergruppen...2
Technische Informatik 2 Adressierungsarten
 Technische Informatik 2 Adressierungsarten Prof. Dr. Miroslaw Malek Sommersemester 2009 www.informatik.hu-berlin.de/rok/ca Thema heute X-Adressmaschine 0-Adressmaschine 1-Adressmaschine 2-Adressmaschine
Technische Informatik 2 Adressierungsarten Prof. Dr. Miroslaw Malek Sommersemester 2009 www.informatik.hu-berlin.de/rok/ca Thema heute X-Adressmaschine 0-Adressmaschine 1-Adressmaschine 2-Adressmaschine
Ordner Berechtigung vergeben Zugriffsrechte unter Windows einrichten
 Ordner Berechtigung vergeben Zugriffsrechte unter Windows einrichten Was sind Berechtigungen? Unter Berechtigungen werden ganz allgemein die Zugriffsrechte auf Dateien und Verzeichnisse (Ordner) verstanden.
Ordner Berechtigung vergeben Zugriffsrechte unter Windows einrichten Was sind Berechtigungen? Unter Berechtigungen werden ganz allgemein die Zugriffsrechte auf Dateien und Verzeichnisse (Ordner) verstanden.
Microsoft PowerPoint 2013 Folien gemeinsam nutzen
 Hochschulrechenzentrum Justus-Liebig-Universität Gießen Microsoft PowerPoint 2013 Folien gemeinsam nutzen Folien gemeinsam nutzen in PowerPoint 2013 Seite 1 von 4 Inhaltsverzeichnis Einleitung... 2 Einzelne
Hochschulrechenzentrum Justus-Liebig-Universität Gießen Microsoft PowerPoint 2013 Folien gemeinsam nutzen Folien gemeinsam nutzen in PowerPoint 2013 Seite 1 von 4 Inhaltsverzeichnis Einleitung... 2 Einzelne
5. Schaltwerke und Speicherelemente S Q
 5. chaltwerke und peicherelemente T chaltwerke Takt, peicherelemente, Flip-Flops Verwendung von Flip-Flops peicherzellen, egister Kodierer, peicher 72 chaltwerke vs. chaltkreise chaltkreise bestehen aus
5. chaltwerke und peicherelemente T chaltwerke Takt, peicherelemente, Flip-Flops Verwendung von Flip-Flops peicherzellen, egister Kodierer, peicher 72 chaltwerke vs. chaltkreise chaltkreise bestehen aus
EMIS - Langzeitmessung
 EMIS - Langzeitmessung Every Meter Is Smart (Jeder Zähler ist intelligent) Inhaltsverzeichnis Allgemeines 2 Bedienung 3 Anfangstand eingeben 4 Endstand eingeben 6 Berechnungen 7 Einstellungen 9 Tarife
EMIS - Langzeitmessung Every Meter Is Smart (Jeder Zähler ist intelligent) Inhaltsverzeichnis Allgemeines 2 Bedienung 3 Anfangstand eingeben 4 Endstand eingeben 6 Berechnungen 7 Einstellungen 9 Tarife
Streamserver24.com. Anleitung Auto-DJ
 Streamserver24.com Anleitung Auto-DJ Zu jedem Streaming-Account von Streamserver24.com ist die Nutzung des Auto-DJ kostenfrei inclusive. Die Auto-DJ-Funktion ermöglicht es Ihnen, Ihren Stream auch bei
Streamserver24.com Anleitung Auto-DJ Zu jedem Streaming-Account von Streamserver24.com ist die Nutzung des Auto-DJ kostenfrei inclusive. Die Auto-DJ-Funktion ermöglicht es Ihnen, Ihren Stream auch bei
Anleitung Lernobjekt-Depot (LOD)
") Anleitung Lernobjekt-Depot (LOD) Anwender von easylearn können voneinander profitieren. Das Lernobjekt-Depot steht allen Benutzern zur Verfügung, um Lernobjekte wie Knowledge Snacks, etc untereinander
Anleitung Lernobjekt-Depot (LOD) Anwender von easylearn können voneinander profitieren. Das Lernobjekt-Depot steht allen Benutzern zur Verfügung, um Lernobjekte wie Knowledge Snacks, etc untereinander
10.3.1.4 Übung - Datensicherung und Wiederherstellung in Windows 7
 5.0 10.3.1.4 Übung - Datensicherung und Wiederherstellung in Windows 7 Einführung Drucken Sie diese Übung aus und führen Sie sie durch. In dieser Übung werden Sie die Daten sichern. Sie werden auch eine
5.0 10.3.1.4 Übung - Datensicherung und Wiederherstellung in Windows 7 Einführung Drucken Sie diese Übung aus und führen Sie sie durch. In dieser Übung werden Sie die Daten sichern. Sie werden auch eine
Benutzerkonto unter Windows 2000
 Jeder Benutzer, der an einem Windows 2000 PC arbeiten möchte, braucht dazu ein Benutzerkonto. Je nach Organisation des Netzwerkes, existiert dieses Benutzerkonto auf der lokalen Workstation oder im Active
Jeder Benutzer, der an einem Windows 2000 PC arbeiten möchte, braucht dazu ein Benutzerkonto. Je nach Organisation des Netzwerkes, existiert dieses Benutzerkonto auf der lokalen Workstation oder im Active