Genetisches Programmieren einfacher Roboterfähigkeiten
|
|
|
- Hansl Braun
- vor 5 Jahren
- Abrufe
Transkript
1 Genetisches Programmieren einfacher Roboterfähigkeiten Ingo Boersch SG Informatik
2 Vortrag Motivation Problemstellung Lösungsidee, Versuchsaufbau Experimente Video Ergebnisse, Zukunft 2
 Anwendung evolutionärer Methoden zur Entwicklung von Bewegungsmustern Entwicklung eines an die Morphologie angepaßten")
3 Motivation Lebewesen bewegen sich elegant, schnell, effizient und genau im Vergleich zu heutigen Robotern trotz komplexer Morphologie unbewußt evolutionär entwickelt (Sensorik, Aktorik, Steuerung parallel) Anwendung evolutionärer Methoden zur Entwicklung von Bewegungsmustern Entwicklung eines an die Morphologie angepaßten Bewegungsmusters 3
4 Problem 1. Komplexe Robotermorphologien vieleelemente, hohe Prozeßunschärfe, fehlendes kinematisches Modell Erlernen einer zielgerichteten Bewegung möglich? 2. Vielversprechende Morphologie Hochsprungroboter, Kletterroboter Erlernen einer angepaßten Bewegung möglich? Dieses Projekt untersucht den 1. Aspekt 4
5 Lösungsidee automatische Entwicklung von Codefragmenten zur Steuerung der Bewegungsabläufe eines autonomen Roboters Methode Genetisches Programmieren (Koza 1992) Auswahl einer komplexen, nicht konstruierten Morphologie: Servorium: zufällige Kontruktion aus 6 Servomotoren, Kugelgelenken, Gewindestangen unbekanntes Prozeßmodell unbekannte Lösungskomplexität Zieleigenschaften bekannt und bewertbar: gerichtete, schnellebewegung 5

6 Servorium 6
7 Genetisches Programmieren Erweiterung der GA zur Entwicklung von Programmcode Anpassung der Lösungskomplexität an die Komplexität des Problems + Funktionsweise: Population von Programmen P={p} (S-Expression) Fitnessfunktion f(p), Reinforcement genetische Operatoren: Crossover, Mutation Selektionswahrscheinlichkeit zur Vermehrung ~f(p) konstante Populationsgröße -> Löschen von Programmen Parameter: 13 numerische, 6 strategische 1 TIME 10 IF > 3 4 7
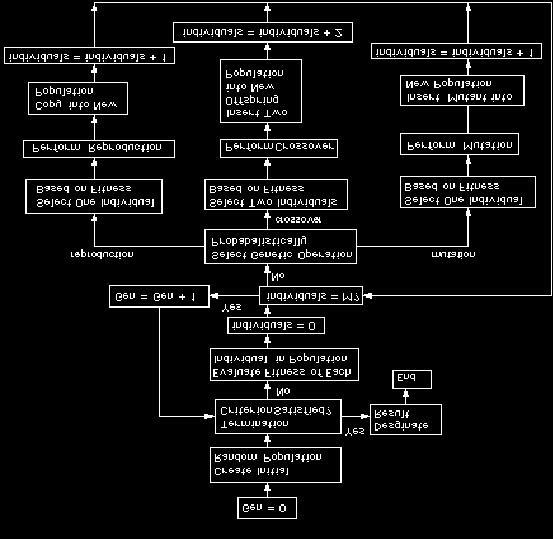
8 PAP GP 8
9 Parameter des GP-Quick 9
10 Hardware: Versuchsaufbau Fitnessfunktion: Odometrie mit Phasequadraturencodern zur Bestimmung der Bewegungsrichtung, 2x2 Sekunden! (-> Realzeitkopplung der Fitnessbestimmung!!) Servorium mit Odometriewagen, externe Stromversorgung PC (nur zum Backup erfolgreicher Individuen und Protokollierung des Versuchs) Software: GP-Kernel GP-Quick (C++, free) 10

11 Servorium mit Odometrie 11
12 Parameter Versuchsdauer 8h (~700 Generierungen) Funktionsset: Closure: Byte Funktionen ADD, SUB, MUL normale binäre arithmetische Operationen DIV geschützte Division MSLEEP Warten für x Millisekunden SETSERVO1.. Einstellen des Servomotors auf einen SETSERVO6 bestimmten Winkel PROG4 Sequenz Terminale CONST Konstante im Intervall [-127,128] Populationsgröße M=100 p(): Crossover-Reproduction-Mutation:
13 Systemarchitektur 13
14 Experimente Phase 1: 5 Versuche à 8h keine messbare Vorwärtsbewegung viele pathologische Bewegungsmuster kewine Evolution ( p: f(p)=0) Phase 2: 5 Versuche á 8h mit Vorselektion pathologische Individuen (<3 Servos, <2 Befehle pro Servo) erhalten keine Evaluierungszeit Extinktion initialer pathologischer I. sehr bewegliche Populationen, aber keine deutlichen Vorwärtsbewegungen Evolution verläßt nicht die Initialisierungsphase 14
15 Experimente (cont.) Phase 3: Versuche á 8h mit Vorselektion + Reset subjektive Bewertung einer Population nach ca. 1h, ev. Neustart 3-4 Neustarts pro Versuch 1 Versuch erzeugt eine deutliche Vorwärtsbewegung: 3m/h 15
16 Ergebnisse Entwicklung angepaßter, komplexer Bewegungsmuster möglich Problematisch: Kopplung an Realzeit -> starker Einfluß der initialen Population auf Versuchsergebnis Koevolutionseffekte bei undefinierter Ausgangslage des Roboters Indizien zur Anwendbarkeit der GP-Methode fehlendes Prozeßmodell unbekannte Lösungskomplexität Testbarkeit des Suchraumes schnelles Reinforcement komplexe Lösungseigenschaften 16

17 Zukunft nah identische Methode - anderer Körper: Vermutung: Lösungsdichte im Suchraum ist größer WS 00/01 RugWalker fern: parallele Generierung eines Prozeßmodells zur Entkopplung der Fitnessbestimmung von der Realzeit 17
Genetisches Programmieren einfacher Roboterfähigkeiten
 I. Boersch, Brandenburg Genetisches Programmieren einfacher Roboterfähigkeiten 1 Zusammenfassung Die Leistungsfähigkeit autonomer Systeme (AS) hängt wesentlich von ihrer Fähigkeit zur Adaption an wechselnde
I. Boersch, Brandenburg Genetisches Programmieren einfacher Roboterfähigkeiten 1 Zusammenfassung Die Leistungsfähigkeit autonomer Systeme (AS) hängt wesentlich von ihrer Fähigkeit zur Adaption an wechselnde
b) Nennen Sie vier hinreichende Bedingungen für Evolution. b) Anzahl fortlaufender Einsen von rechts. c) Sind in a) oder b) Plateaus enthalten?
 Nennen Sie vier hinreichende Bedingungen für Evolution. b) Anzahl fortlaufender Einsen von rechts. c) Sind in a) oder b) Plateaus enthalten?") Übungsblatt LV Künstliche Intelligenz, Evolutionäre Algorithmen (1), 2015 Aufgabe 1. Evolution a) Finden Sie zwei Evolutionsbeispiele auÿerhalb der Biologie. Identizieren Sie jeweils Genotyp, Phänotyp,
Übungsblatt LV Künstliche Intelligenz, Evolutionäre Algorithmen (1), 2015 Aufgabe 1. Evolution a) Finden Sie zwei Evolutionsbeispiele auÿerhalb der Biologie. Identizieren Sie jeweils Genotyp, Phänotyp,
Anwendung genetischer Algorithmen zur Lösung des n Dame Problems und zur Optimierung von Autoprofilen
 Anwendung genetischer Algorithmen zur Lösung des n Dame Problems und zur Optimierung von Autoprofilen Jana Müller Seminar Das Virtuelle Labor Otto von Guericke Universität Magdeburg Gliederung 1. Motivation
Anwendung genetischer Algorithmen zur Lösung des n Dame Problems und zur Optimierung von Autoprofilen Jana Müller Seminar Das Virtuelle Labor Otto von Guericke Universität Magdeburg Gliederung 1. Motivation
Optimale Produktliniengestaltung mit Genetischen Algorithmen
 Optimale Produktliniengestaltung mit Genetischen Algorithmen 1 Einleitung 2 Produktlinienoptimierung 3 Genetische Algorithmen 4 Anwendung 5 Fazit Seite 1 Optimale Produktliniengestaltung mit Genetischen
Optimale Produktliniengestaltung mit Genetischen Algorithmen 1 Einleitung 2 Produktlinienoptimierung 3 Genetische Algorithmen 4 Anwendung 5 Fazit Seite 1 Optimale Produktliniengestaltung mit Genetischen
InformatiCup 2009 EvolutionConsole
 InformatiCup 2009 EvolutionConsole Wilhelm Büchner Hochschule 19. März 2010 1 1. Das Team Teammitglieder Ralf Defrancesco KION Information Services GmbH Systemadministrator Daniel Herken Scooter Attack
InformatiCup 2009 EvolutionConsole Wilhelm Büchner Hochschule 19. März 2010 1 1. Das Team Teammitglieder Ralf Defrancesco KION Information Services GmbH Systemadministrator Daniel Herken Scooter Attack
Einführung in die Methoden der Künstlichen Intelligenz. Evolutionäre Algorithmen
 Einführung in die Methoden der Künstlichen Intelligenz Evolutionäre Algorithmen Dr. David Sabel WS 2012/13 Stand der Folien: 12. November 2012 Evolutionäre / Genetische Algorithmen Anwendungsbereich: Optimierung
Einführung in die Methoden der Künstlichen Intelligenz Evolutionäre Algorithmen Dr. David Sabel WS 2012/13 Stand der Folien: 12. November 2012 Evolutionäre / Genetische Algorithmen Anwendungsbereich: Optimierung
Evolutionäre (Genetische) Algorithmen
 Algorithmen") Evolutionäre (Genetische) Algorithmen Ziel, Aufgabe von evolutionären Algorithmen: Optimierung von Objekten mit komplexer Beschreibung, wobei es Parameter gibt. Die Objekte kodiert man so als Bitstrings,
Evolutionäre (Genetische) Algorithmen Ziel, Aufgabe von evolutionären Algorithmen: Optimierung von Objekten mit komplexer Beschreibung, wobei es Parameter gibt. Die Objekte kodiert man so als Bitstrings,
GP-Music: An Interactive Genetic Programming System for Music Generation with Automated Fitness
 GP-Music: An Interactive Genetic Programming System for Music Generation with Automated Fitness Raters Brad Johanson, Riccardo Poli Seminarvortrag von Thomas Arnold G ˇ ˇ ˇ ˇ WS 2012/13 TU Darmstadt Seminar
GP-Music: An Interactive Genetic Programming System for Music Generation with Automated Fitness Raters Brad Johanson, Riccardo Poli Seminarvortrag von Thomas Arnold G ˇ ˇ ˇ ˇ WS 2012/13 TU Darmstadt Seminar
Evolution und Algorithmen
 Kapitel 6 Spezialvorlesung Modul 10-202-2206 (Fortgeschrittene Methoden in der Bioinformatik) Jana Hertel Professur für Bioinformatik Institut für Informatik Universität Leipzig Machine learning in bioinformatics
Kapitel 6 Spezialvorlesung Modul 10-202-2206 (Fortgeschrittene Methoden in der Bioinformatik) Jana Hertel Professur für Bioinformatik Institut für Informatik Universität Leipzig Machine learning in bioinformatics
Genetische Programmierung
 15. Juli 2007 Anfang der 90er von John R. Koza entwickelt. Verfahren zur automatisierten Erstellung von Programmen. Von der Evolution inspiriert. Anforderungen an die Möglichst korrekte Lösung ergeben
15. Juli 2007 Anfang der 90er von John R. Koza entwickelt. Verfahren zur automatisierten Erstellung von Programmen. Von der Evolution inspiriert. Anforderungen an die Möglichst korrekte Lösung ergeben
Optimierung und Entwurf mit Evolutionären Algorithmen
 Fakultät Informatik, Institut für Angewandte Informatik, Lehrstuhl für Technische Informationssysteme Optimierung und Entwurf mit Evolutionären Algorithmen Dresden, 01.02.2007 Gliederung natürliche Evolution
Fakultät Informatik, Institut für Angewandte Informatik, Lehrstuhl für Technische Informationssysteme Optimierung und Entwurf mit Evolutionären Algorithmen Dresden, 01.02.2007 Gliederung natürliche Evolution
Evolution im Computer
 Evolution im Computer Stephan Pirnbaum @spirnbaum Junior-Consultant @buschmais Steffen Gemkow @SteffenGemkow Geschäftsführer @ObjectFab Infinite-Monkey Theorem Man nehme: Unendliche Anzahl Affen Je Affe
Evolution im Computer Stephan Pirnbaum @spirnbaum Junior-Consultant @buschmais Steffen Gemkow @SteffenGemkow Geschäftsführer @ObjectFab Infinite-Monkey Theorem Man nehme: Unendliche Anzahl Affen Je Affe
Genetische und Evolutionäre Algorithmen (Vol. 1)
") Vortrag über Genetische und Evolutionäre Algorithmen (Vol. ) von Adam El Sayed Auf und Kai Lienemann Gliederung: ) Einführung 2) Grundkonzept 3) Genaue Beschreibung des Genetischen Algorithmus Lösungsrepräsentation
Vortrag über Genetische und Evolutionäre Algorithmen (Vol. ) von Adam El Sayed Auf und Kai Lienemann Gliederung: ) Einführung 2) Grundkonzept 3) Genaue Beschreibung des Genetischen Algorithmus Lösungsrepräsentation
2.5 Evolutionäre (Genetische) Algorithmen
 Algorithmen") KI 1, SS 2011, Kapitel 2, GA 1 2.5 Evolutionäre (Genetische) Algorithmen Das Ziel bzw. die Aufgabe von evolutionären Algorithmen ist eine Optimierung von Objekten mit komplexer Beschreibung, wobei es variable
KI 1, SS 2011, Kapitel 2, GA 1 2.5 Evolutionäre (Genetische) Algorithmen Das Ziel bzw. die Aufgabe von evolutionären Algorithmen ist eine Optimierung von Objekten mit komplexer Beschreibung, wobei es variable
Genetische Algorithmen
 Genetische Algorithmen Von Valentina Hoppe und Jan Rörden Seminar: Künstliche Intelligenz II Dozent: Stephan Schwiebert Gliederung Biologische Evolution Genetischer Algorithmus Definition theoretischer
Genetische Algorithmen Von Valentina Hoppe und Jan Rörden Seminar: Künstliche Intelligenz II Dozent: Stephan Schwiebert Gliederung Biologische Evolution Genetischer Algorithmus Definition theoretischer
Synthese Eingebetteter Systeme. Übung 6
 12 Synthese Eingebetteter Systeme Sommersemester 2011 Übung 6 Michael Engel Informatik 12 TU Dortmund 2011/07/15 Übung 6 Evolutionäre Algorithmen Simulated Annealing - 2 - Erklären Sie folgende Begriffe
12 Synthese Eingebetteter Systeme Sommersemester 2011 Übung 6 Michael Engel Informatik 12 TU Dortmund 2011/07/15 Übung 6 Evolutionäre Algorithmen Simulated Annealing - 2 - Erklären Sie folgende Begriffe
Survival of the Fittest Optimierung mittels Genetischer Algorithmen
 Übung zu Organic Computing Survival of the Fittest Optimierung mittels Genetischer Algorithmen Sabine Helwig Lehrstuhl für Informatik 12 (Hardware-Software-Co-Design) Universität Erlangen-Nürnberg sabine.helwig@informatik.uni-erlangen.de
Übung zu Organic Computing Survival of the Fittest Optimierung mittels Genetischer Algorithmen Sabine Helwig Lehrstuhl für Informatik 12 (Hardware-Software-Co-Design) Universität Erlangen-Nürnberg sabine.helwig@informatik.uni-erlangen.de
Genetische und Evolutionäre Algorithmen (Vol. 2)
") Vortrag über Genetische und Evolutionäre Algorithmen (Vol. 2) von Adam El Sayed Auf und Kai Lienemann Gliederung: 4) Rückblick 5) Allgemeine Einführung 6) Genauere Beschreibung von Evolutionären Strategien
Vortrag über Genetische und Evolutionäre Algorithmen (Vol. 2) von Adam El Sayed Auf und Kai Lienemann Gliederung: 4) Rückblick 5) Allgemeine Einführung 6) Genauere Beschreibung von Evolutionären Strategien
Genetische Algorithmen. Uwe Reichel IPS, LMU München 8. Juli 2008
 Genetische Algorithmen Uwe Reichel IPS, LMU München reichelu@phonetik.uni-muenchen.de 8. Juli 2008 Inhalt Einführung Algorithmus Erweiterungen alternative Evolutions- und Lernmodelle Inhalt 1 Einführung
Genetische Algorithmen Uwe Reichel IPS, LMU München reichelu@phonetik.uni-muenchen.de 8. Juli 2008 Inhalt Einführung Algorithmus Erweiterungen alternative Evolutions- und Lernmodelle Inhalt 1 Einführung
Programme züchten - Evolution als Optimierungsverfahren. Heiko Spindler Freiberuflicher IT-Berater, Architekt, Autor und Coach
 Programme züchten - Evolution als Optimierungsverfahren Heiko Spindler Freiberuflicher IT-Berater, Architekt, Autor und Coach Agenda Was ist Evolution? Simulieren von Evolution Ein erstes Beispiel Programme
Programme züchten - Evolution als Optimierungsverfahren Heiko Spindler Freiberuflicher IT-Berater, Architekt, Autor und Coach Agenda Was ist Evolution? Simulieren von Evolution Ein erstes Beispiel Programme
Genetische Algorithmen
 Genetische Algorithmen Prof. Dr. Ottmar Beucher Dezember 2001 Genetische Algorithmen 1 Optimierungsaufgaben Ein einfaches Beispiel Prinzipielle Formulierung Lösungsansätze Genetische Algorithmen Anwendungen
Genetische Algorithmen Prof. Dr. Ottmar Beucher Dezember 2001 Genetische Algorithmen 1 Optimierungsaufgaben Ein einfaches Beispiel Prinzipielle Formulierung Lösungsansätze Genetische Algorithmen Anwendungen
10. Vorlesung Stochastische Optimierung
 Soft Control (AT 3, RMA) 10. Vorlesung Stochastische Optimierung Genetische Algorithmen 10. Vorlesung im Aufbau der Vorlesung 1. Einführung Soft Control: Definition und Abgrenzung, Grundlagen "intelligenter"
Soft Control (AT 3, RMA) 10. Vorlesung Stochastische Optimierung Genetische Algorithmen 10. Vorlesung im Aufbau der Vorlesung 1. Einführung Soft Control: Definition und Abgrenzung, Grundlagen "intelligenter"
Offenbar hängt das Ergebnis nur von der Summe der beiden Argumente ab...
 0 1 2 0 2 1 1 2 0 2 1 0 Offenbar hängt das Ergebnis nur von der Summe der beiden Argumente ab... 0 1 2 0 1 2 1 1 3 2 2 3 212 Um solche Tabellen leicht implementieren zu können, stellt Java das switch-statement
0 1 2 0 2 1 1 2 0 2 1 0 Offenbar hängt das Ergebnis nur von der Summe der beiden Argumente ab... 0 1 2 0 1 2 1 1 3 2 2 3 212 Um solche Tabellen leicht implementieren zu können, stellt Java das switch-statement
Populationsbasierte Suche. Evolutionäre Algorithmen (1)
") Populationsbasierte Suche Bisherige Meta-Heuristiken: Simulated Annealing Tabu Search Ausgehend von einer Lösung wird gesucht Populationsbasierte Heuristiken Suche erfolgt ausgehend von mehreren Lösungen
Populationsbasierte Suche Bisherige Meta-Heuristiken: Simulated Annealing Tabu Search Ausgehend von einer Lösung wird gesucht Populationsbasierte Heuristiken Suche erfolgt ausgehend von mehreren Lösungen
Algorithmen für schwierige Optimierungsprobleme Vorlesung für den Bereich Bachelor Informatik
 Algorithmen für schwierige Optimierungsprobleme Vorlesung für den Bereich Bachelor Informatik Dozent: Prof. Dr. Henning Meyerhenke Paralleles Rechnen, Fakultät für Informatik 1 KIT Universität des Landes
Algorithmen für schwierige Optimierungsprobleme Vorlesung für den Bereich Bachelor Informatik Dozent: Prof. Dr. Henning Meyerhenke Paralleles Rechnen, Fakultät für Informatik 1 KIT Universität des Landes
Genetisches Programmieren
 Genetisches Programmieren Marc Musch Inhaltsverzeichnis 1 Grundkonzept 2 2 Exkurs: LISP 3 3 Vorbereitung eines Laufes 4 3.1 Festlegen der Terminalmenge und der Funktionenmenge 4 3.2 Bestimmen eines geeigneten
Genetisches Programmieren Marc Musch Inhaltsverzeichnis 1 Grundkonzept 2 2 Exkurs: LISP 3 3 Vorbereitung eines Laufes 4 3.1 Festlegen der Terminalmenge und der Funktionenmenge 4 3.2 Bestimmen eines geeigneten
Optimierung auf rekonfigurierbaren Rechensystemen
 Optimierung auf rekonfigurierbaren Rechensystemen Evolution in dynamisch rekonfigurierbarer Hardware Peter Bungert Hartmut Schmeck Institut für Angewandte Informatik und Formale Bescheibungsverfahren (AIFB)
Optimierung auf rekonfigurierbaren Rechensystemen Evolution in dynamisch rekonfigurierbarer Hardware Peter Bungert Hartmut Schmeck Institut für Angewandte Informatik und Formale Bescheibungsverfahren (AIFB)
Focusing Search in Multiobjective Evolutionary Optimization through Preference Learning from User Feedback
 Focusing Search in Multiobjective Evolutionary Optimization through Preference Learning from User Feedback Thomas Fober Weiwei Cheng Eyke Hüllermeier AG Knowledge Engineering & Bioinformatics Fachbereich
Focusing Search in Multiobjective Evolutionary Optimization through Preference Learning from User Feedback Thomas Fober Weiwei Cheng Eyke Hüllermeier AG Knowledge Engineering & Bioinformatics Fachbereich
Die Einführung von mehreren "Start Bausteinen", um das Programm zu starten, realisiert leicht die parallele Programmverarbeitung (Parallele Tasks).
.") Programmierung Allgemein Anfänger und Fortgeschrittene können die Programmierfunktion in der LEGO MINDSTORMS Education EV3 Software gut nutzen, weil sie vor allem grafisch ist. Mit Blick auf das Programmieren
Programmierung Allgemein Anfänger und Fortgeschrittene können die Programmierfunktion in der LEGO MINDSTORMS Education EV3 Software gut nutzen, weil sie vor allem grafisch ist. Mit Blick auf das Programmieren
Einige Teilgebiete der Informatik
 Einige Teilgebiete der Informatik Theoretische Informatik Formale Sprachen, Automatentheorie, Komplexitätstheorie, Korrektheit und Berechenbarkeit, Algorithmik, Logik Praktische Informatik Betriebssysteme,
Einige Teilgebiete der Informatik Theoretische Informatik Formale Sprachen, Automatentheorie, Komplexitätstheorie, Korrektheit und Berechenbarkeit, Algorithmik, Logik Praktische Informatik Betriebssysteme,
Adaptive Systeme. Prof. Dr.-Ing. Heinz-Georg Fehn Prof. Dr. rer. nat. Nikolaus Wulff
 Adaptive Systeme Evolutionäre Algorithmen: Überlebenskampf und Evolutionäre Strategien Prof. Dr.-Ing. Heinz-Georg Fehn Prof. Dr. rer. nat. Nikolaus Wulff Überblick Einleitung Adaptive Filter Künstliche
Adaptive Systeme Evolutionäre Algorithmen: Überlebenskampf und Evolutionäre Strategien Prof. Dr.-Ing. Heinz-Georg Fehn Prof. Dr. rer. nat. Nikolaus Wulff Überblick Einleitung Adaptive Filter Künstliche
Evolutionäre Algorithmen
 Karsten Weicker Evolutionäre Algorithmen 2., überarbeitete und erweiterte Auflage m Teubner Inhaltsverzeichnis 1 Natürliche Evolution 1 1.1 Entwicklung der evolutionären Mechanismen 2 1.2 Evolutionsfaktoren
Karsten Weicker Evolutionäre Algorithmen 2., überarbeitete und erweiterte Auflage m Teubner Inhaltsverzeichnis 1 Natürliche Evolution 1 1.1 Entwicklung der evolutionären Mechanismen 2 1.2 Evolutionsfaktoren
Genetische Programmierung
 Bernd Ebersberger Genetische Programmierung Ein Instrument zur empirischen Fundierung ökonomischer Modelle A 234920 Deutscher Universitäts-Verlag Inhaltsverzeichnis Abbildungsverzeichnis Tabellenverzeichnis
Bernd Ebersberger Genetische Programmierung Ein Instrument zur empirischen Fundierung ökonomischer Modelle A 234920 Deutscher Universitäts-Verlag Inhaltsverzeichnis Abbildungsverzeichnis Tabellenverzeichnis
Technische Universität Braunschweig Institut für Programmierung und Reaktive Systeme
 Technische Universität Braunschweig Institut für Programmierung und Reaktive Systeme Programmieren I Dr. Werner Struckmann 17. Februar 2018 Name: Vorname: Matrikelnummer: Kennnummer: Anrede: Frau Herr
Technische Universität Braunschweig Institut für Programmierung und Reaktive Systeme Programmieren I Dr. Werner Struckmann 17. Februar 2018 Name: Vorname: Matrikelnummer: Kennnummer: Anrede: Frau Herr
Grundbegriffe der Informatik
 Grundbegriffe der Informatik Kapitel 22: Mima-X Thomas Worsch KIT, Institut für Theoretische Informatik Wintersemester 2015/2016 GBI Grundbegriffe der Informatik KIT, Institut für Theoretische Informatik
Grundbegriffe der Informatik Kapitel 22: Mima-X Thomas Worsch KIT, Institut für Theoretische Informatik Wintersemester 2015/2016 GBI Grundbegriffe der Informatik KIT, Institut für Theoretische Informatik
Evolutionäre Algorithmen Genetische Programmierung
 Evolutionäre Algorithmen Genetische Programmierung Prof. Dr. Rudolf Kruse Pascal Held {kruse,pheld}@iws.cs.uni-magdeburg.de Otto-von-Guericke-Universität Magdeburg Fakultät für Informatik Institut für
Evolutionäre Algorithmen Genetische Programmierung Prof. Dr. Rudolf Kruse Pascal Held {kruse,pheld}@iws.cs.uni-magdeburg.de Otto-von-Guericke-Universität Magdeburg Fakultät für Informatik Institut für
Programme züchten Evolution als Optimierungsverfahren. Heiko Spindler
 Programme züchten Evolution als Optimierungsverfahren Heiko Spindler Freiberuflicher IT-Berater Agenda Was ist Evolution? Simulieren von Evolution Ein einfaches Beispiel Programme züchten Fazit Heiko Spindler
Programme züchten Evolution als Optimierungsverfahren Heiko Spindler Freiberuflicher IT-Berater Agenda Was ist Evolution? Simulieren von Evolution Ein einfaches Beispiel Programme züchten Fazit Heiko Spindler
10.4 Konstante Objekte
 10.4 Konstante Objekte Genau wie bei einfachen Datentypen (int,double,...) kann man auch Objekte als const deklarieren. Eine solche Deklaration bedeutet, daß alle Attribute so behandelt werden, als wären
10.4 Konstante Objekte Genau wie bei einfachen Datentypen (int,double,...) kann man auch Objekte als const deklarieren. Eine solche Deklaration bedeutet, daß alle Attribute so behandelt werden, als wären
Spaichinger Entwicklungsumgebung 1.1 Zur C-Programmierung und Simulation von ct-bots (Fahrrobotern)
") Bedienungsanleitung Spaichinger Entwicklungsumgebung 1.1 Zur C-Programmierung und Simulation von ct-bots (Fahrrobotern) Freeware für Microsoft Windows Dr. Markus Ziegler www.spaichinger-schallpegelmesser.de
Bedienungsanleitung Spaichinger Entwicklungsumgebung 1.1 Zur C-Programmierung und Simulation von ct-bots (Fahrrobotern) Freeware für Microsoft Windows Dr. Markus Ziegler www.spaichinger-schallpegelmesser.de
Sucosoft S40 KOP/FBS KOP FBS
 Sucosoft S40 KOP/FBS KOP FBS Grafische Elemente Netzwerke erstellen Netzwerke erstellen Programme werden in KOP durch grafische Elemente dargestellt. Abfrage einer Variable auf den Zustand 1 Abfrage einer
Sucosoft S40 KOP/FBS KOP FBS Grafische Elemente Netzwerke erstellen Netzwerke erstellen Programme werden in KOP durch grafische Elemente dargestellt. Abfrage einer Variable auf den Zustand 1 Abfrage einer
Genetische Algorithmen von der Evolution lernen
 Genetische Algorithmen von der Evolution lernen (c) Till Hänisch 2003, BA Heidenheim Literatur zusätzlich zum Lit. Verz. Nils J. Nilsson Artificial Intelligence Morgan Kaufmann, 1998 Ansatz Bisher: Problemlösung
Genetische Algorithmen von der Evolution lernen (c) Till Hänisch 2003, BA Heidenheim Literatur zusätzlich zum Lit. Verz. Nils J. Nilsson Artificial Intelligence Morgan Kaufmann, 1998 Ansatz Bisher: Problemlösung
JMPCN Sprungbefehl nur ausführen, wenn VKE 0 ist. JMPC Sprungbefehl nur ausführen, wenn VKE 1 ist. JMP Ohne Bedingung zur Sprungmarke wechseln.
 Grafische Elemente Netzwerke erstellen Netzwerke erstellen Programme werden in KOP durch grafische Elemente dargestellt. Abfrage einer Variable auf den Zustand 1 Abfrage einer Variable auf den Zustand
Grafische Elemente Netzwerke erstellen Netzwerke erstellen Programme werden in KOP durch grafische Elemente dargestellt. Abfrage einer Variable auf den Zustand 1 Abfrage einer Variable auf den Zustand
Evolutionäre Robotik
 Evolutionäre Robotik Evolutionäre Robotik Evolutionäre Robotik Lernen / Adaption erfolgt auf (mindestens 3 Ebenen) Evolutionäre Robotik Lernen / Adaption erfolgt auf (mindestens 3 Ebenen) 1. Adaption Evolutionäre
Evolutionäre Robotik Evolutionäre Robotik Evolutionäre Robotik Lernen / Adaption erfolgt auf (mindestens 3 Ebenen) Evolutionäre Robotik Lernen / Adaption erfolgt auf (mindestens 3 Ebenen) 1. Adaption Evolutionäre
8. Evolution (Teil II): Koevolution
: Koevolution") 8. Evolution (Teil II): Koevolution Darwinsche Evolution bedeutet zunächst einmal Konkurrenz wie können mehrere Arten gemeinsam evolvieren? was passiert, wenn die Arten ihre Fitnesslandschaften gegenseitig
8. Evolution (Teil II): Koevolution Darwinsche Evolution bedeutet zunächst einmal Konkurrenz wie können mehrere Arten gemeinsam evolvieren? was passiert, wenn die Arten ihre Fitnesslandschaften gegenseitig
Arbeitsblatt: Wie rede ich mit einem Roboter?
 Arbeitsblatt: Wie rede ich mit einem Roboter? Ausgangslage: Ein Roboter besitzt Sensoren, um seine Umgebung wahrzunehmen, und Aktoren, um seine Umgebung zu beeinflussen. Auch Menschen besitzen Sensoren
Arbeitsblatt: Wie rede ich mit einem Roboter? Ausgangslage: Ein Roboter besitzt Sensoren, um seine Umgebung wahrzunehmen, und Aktoren, um seine Umgebung zu beeinflussen. Auch Menschen besitzen Sensoren
Genetische Algorithmen
 Genetische Algorithmen Shawn Keen Zusammenfassung Eine weitere Herangehensweise an das maschinelle Lernen ist die Nachahmung evolutionärer Prozesse. Hier wollen wir uns mit den sogenannten Genetischen
Genetische Algorithmen Shawn Keen Zusammenfassung Eine weitere Herangehensweise an das maschinelle Lernen ist die Nachahmung evolutionärer Prozesse. Hier wollen wir uns mit den sogenannten Genetischen
In dieser Aufgabe geht es darum, das einfache Meteor-Spiel zu verstehen und anzupassen. Lade als erstes das Spiel sample12 und spiele es.
 In dieser Aufgabe geht es darum, das einfache Meteor-Spiel zu verstehen und anzupassen. Lade als erstes das Spiel sample12 und spiele es. Im Spiel fällt ein Meteor vom oben zum unteren Rand. Das Raumschiff
In dieser Aufgabe geht es darum, das einfache Meteor-Spiel zu verstehen und anzupassen. Lade als erstes das Spiel sample12 und spiele es. Im Spiel fällt ein Meteor vom oben zum unteren Rand. Das Raumschiff
Rechnernetze und Organisation
 Arithmetic Logic Unit ALU Professor Dr. Johannes Horst Wolkerstorfer Cerjak, 9.2.25 RNO VO4_alu Übersicht Motivation ALU Addition Subtraktion De Morgan Shift Multiplikation Gleitkommazahlen Professor Dr.
Arithmetic Logic Unit ALU Professor Dr. Johannes Horst Wolkerstorfer Cerjak, 9.2.25 RNO VO4_alu Übersicht Motivation ALU Addition Subtraktion De Morgan Shift Multiplikation Gleitkommazahlen Professor Dr.
Artificial Life und Multiagentensysteme
 Vortrag im Rahmen des Seminars: Artificial Life und Multiagentensysteme Prof. Dr. Winfried Kurth Sommersemester 2003 Prognose von Zeitreihen mit GA/GP Mathias Radicke, Informatikstudent, 10. Semester Gliederung
Vortrag im Rahmen des Seminars: Artificial Life und Multiagentensysteme Prof. Dr. Winfried Kurth Sommersemester 2003 Prognose von Zeitreihen mit GA/GP Mathias Radicke, Informatikstudent, 10. Semester Gliederung
STUDIENGANG INFORMATIK IN DER FAKULTÄT TECHNIK (TI)
") STUDIENGANG INFORMATIK IN DER FAKULTÄT TECHNIK (TI) Informationstechnik (TIT) Mobile Informatik (TIM) IT Security (TIS) Stand: 07/2017 www.ravensburg.dhbw.de STUDIENGANG INFORMATIK Studienangebote Studiengang
STUDIENGANG INFORMATIK IN DER FAKULTÄT TECHNIK (TI) Informationstechnik (TIT) Mobile Informatik (TIM) IT Security (TIS) Stand: 07/2017 www.ravensburg.dhbw.de STUDIENGANG INFORMATIK Studienangebote Studiengang
Probabilistische Algorithmen Zufallszahlen - Monte Carlo - Genetische Programmierung
 Probabilistische Algorithmen Zufallszahlen - Monte Carlo - Genetische Programmierung 25. Mai 2009 Inhaltsverzeichnis Pseudozufallszahlen Kongruenzmethode Monte-Carlo-Algorithmen Bsp Primzahltest Genetische
Probabilistische Algorithmen Zufallszahlen - Monte Carlo - Genetische Programmierung 25. Mai 2009 Inhaltsverzeichnis Pseudozufallszahlen Kongruenzmethode Monte-Carlo-Algorithmen Bsp Primzahltest Genetische
Genetische Programmierung
 TU Chemnitz Fakultät für Informatik Stephan Heinich Genetische Programmierung in C Wintersemester 2001/02 Proseminar: Proseminarleiter: Genetische Programmierung Dipl. Inf. J. Arnold Inhalt 1. Beispiel:
TU Chemnitz Fakultät für Informatik Stephan Heinich Genetische Programmierung in C Wintersemester 2001/02 Proseminar: Proseminarleiter: Genetische Programmierung Dipl. Inf. J. Arnold Inhalt 1. Beispiel:
Die FINCA Eine Platform für für Anwendungen des Ubiquitous Computing
 Die FINCA Eine Platform für für Anwendungen des Ubiquitous Computing Christian 17. Juni 2009 Motivation Anwendungen und Anforderungen im Bereich UC Die FINCA Infrastruktur einer Intelligenten Umgebung
Die FINCA Eine Platform für für Anwendungen des Ubiquitous Computing Christian 17. Juni 2009 Motivation Anwendungen und Anforderungen im Bereich UC Die FINCA Infrastruktur einer Intelligenten Umgebung
Softwareprojektpraktikum Maschinelle Übersetzung
 Softwareprojektpraktikum Maschinelle Übersetzung Jan-Thorsten Peter, Andreas Guta, Jan Rosendahl max.bleu@i6.informatik.rwth-aachen.de 5. Mai 2017 Human Language Technology and Pattern Recognition Lehrstuhl
Softwareprojektpraktikum Maschinelle Übersetzung Jan-Thorsten Peter, Andreas Guta, Jan Rosendahl max.bleu@i6.informatik.rwth-aachen.de 5. Mai 2017 Human Language Technology and Pattern Recognition Lehrstuhl
LED Skalenbeleuchtung mit einem Arduino
 Projektteil: LED Skalenbeleuchtung mit einem Arduino Aufgaben: - Ein Taster schaltet die LED-Beleuchtung ein - Nach Ablauf einer im Programm hinterlegten Zeit schaltet sich die Beleuchtung von selbst wieder
Projektteil: LED Skalenbeleuchtung mit einem Arduino Aufgaben: - Ein Taster schaltet die LED-Beleuchtung ein - Nach Ablauf einer im Programm hinterlegten Zeit schaltet sich die Beleuchtung von selbst wieder
Funktionale Programmierung ALP I. µ-rekursive Funktionen WS 2012/2013. Prof. Dr. Margarita Esponda. Prof. Dr. Margarita Esponda
 ALP I µ-rekursive Funktionen WS 2012/2013 Primitiv-rekursive Funktionen Jede primitiv-rekursive Funktion ist Loop-berechenbar. Das bedeutet, dass jede PR-Funktion in der Loop-Programmiersprache formuliert
ALP I µ-rekursive Funktionen WS 2012/2013 Primitiv-rekursive Funktionen Jede primitiv-rekursive Funktion ist Loop-berechenbar. Das bedeutet, dass jede PR-Funktion in der Loop-Programmiersprache formuliert
Genetische Algorithmen
 Genetische Algorithmen In dieser Ausarbeitung gemäss Aufgabenstellung auf der Kurshomepage des Moduls Knowledge- Based Systems wird die Funktionsweise und Nutzung von genetischen Algorithmen erläutert.
Genetische Algorithmen In dieser Ausarbeitung gemäss Aufgabenstellung auf der Kurshomepage des Moduls Knowledge- Based Systems wird die Funktionsweise und Nutzung von genetischen Algorithmen erläutert.
Seminar Verkehrsinformatik Offline-Optimierung der Lichtsignal-Koordinierung mittels genetischer Algorithmen
 Fachhochschule Wedel - SS 2006 Seminar Verkehrsinformatik Offline-Optimierung der Lichtsignal-Koordinierung mittels genetischer Algorithmen Marco Lehmann (wi5909) m@rco-l.de 3. Juli 2006 Gliederung 1.
Fachhochschule Wedel - SS 2006 Seminar Verkehrsinformatik Offline-Optimierung der Lichtsignal-Koordinierung mittels genetischer Algorithmen Marco Lehmann (wi5909) m@rco-l.de 3. Juli 2006 Gliederung 1.
Praktikum ASP Blatt 2 1. LEHRSTUHL FÜR RECHNERARCHITEKTUR UND PARALLELE SYSTEME Aspekte der systemnahen Programmierung bei der Spieleentwicklung
 Praktikum ASP Blatt 2 1 LEHRSTUHL FÜR RECHNERARCHITEKTUR UND PARALLELE SYSTEME Aspekte der systemnahen Programmierung bei der Spieleentwicklung Arbeitsblatt 2 29.10.2018-04.11.2018 T1 Grundlagen der AArch64-Architektur
Praktikum ASP Blatt 2 1 LEHRSTUHL FÜR RECHNERARCHITEKTUR UND PARALLELE SYSTEME Aspekte der systemnahen Programmierung bei der Spieleentwicklung Arbeitsblatt 2 29.10.2018-04.11.2018 T1 Grundlagen der AArch64-Architektur
Johannes Stier. ni.com
 1 Johannes Stier Technische Universität Dresden Studiendekan Mechatronik Prof. Dr.-Ing. Michael Beitelschmidt Lego Mindstorms EV3 hat Einzug in das Einführungsprojekt Mechatronik gefunden johannes.stier@tu-dresden.de
1 Johannes Stier Technische Universität Dresden Studiendekan Mechatronik Prof. Dr.-Ing. Michael Beitelschmidt Lego Mindstorms EV3 hat Einzug in das Einführungsprojekt Mechatronik gefunden johannes.stier@tu-dresden.de
9. Vektoren. (auch Felder/array)
") 9. Vektoren (auch Felder/array) Motivation Hat man mehrere Objekte gleichen Datentyps, so kann man sie explizit deklarieren, wenn die Anzahl bekannt ist double x1,x2,x3,x4; Nachteile: versagt, -wenn die
9. Vektoren (auch Felder/array) Motivation Hat man mehrere Objekte gleichen Datentyps, so kann man sie explizit deklarieren, wenn die Anzahl bekannt ist double x1,x2,x3,x4; Nachteile: versagt, -wenn die
Programmieren in C++ Überladen von Methoden und Operatoren
 Programmieren in C++ Überladen von Methoden und Operatoren Inhalt Überladen von Methoden Überladen von Operatoren Implizite und explizite Konvertierungsoperatoren 7-2 Überladen von Methoden Signatur einer
Programmieren in C++ Überladen von Methoden und Operatoren Inhalt Überladen von Methoden Überladen von Operatoren Implizite und explizite Konvertierungsoperatoren 7-2 Überladen von Methoden Signatur einer
Grundlagen der Programmierung
 Grundlagen der Programmierung Dr. Tom Kamphans 1. Vorlesung 04.04.2018 1 Organisatorisches Vorlesung: Mittwochs 14:00 15:30, Raum F 201 Übung: Mittwochs 15:45 19:00, Raum F 225 Übung: alle zwei Wochen
Grundlagen der Programmierung Dr. Tom Kamphans 1. Vorlesung 04.04.2018 1 Organisatorisches Vorlesung: Mittwochs 14:00 15:30, Raum F 201 Übung: Mittwochs 15:45 19:00, Raum F 225 Übung: alle zwei Wochen
ORIKA. Lycée Technique des Arts et Métiers. ... viel mehr als nur ein Spielzeug
 ORIKA Lycée Technique des Arts et Métiers... viel mehr als nur ein Spielzeug Informationen, Hinweise und Bezugsquellen findest du unter folgender Internetadresse: http://www.ltam.lu/fischertechnik ORIKA/Informatik
ORIKA Lycée Technique des Arts et Métiers... viel mehr als nur ein Spielzeug Informationen, Hinweise und Bezugsquellen findest du unter folgender Internetadresse: http://www.ltam.lu/fischertechnik ORIKA/Informatik
Künstliche Intelligenz
 Künstliche Intelligenz Vorlesung 9 und 10: Evolutionäre Standardalgorithmen 1/69 LERNZIELE Die gängigen Standardalgorithmen, aus der Anfangszeit bis heute, werden vorgestellt. Die bekannten Standardalgorithmen
Künstliche Intelligenz Vorlesung 9 und 10: Evolutionäre Standardalgorithmen 1/69 LERNZIELE Die gängigen Standardalgorithmen, aus der Anfangszeit bis heute, werden vorgestellt. Die bekannten Standardalgorithmen
Radgetriebene Systeme
 Radgetriebene Systeme Mobilität, Räder Räder benötigen weniger Energie und erlauben eine schnellere Fortbewegung (auf entsprechendem Terrain) Benötigen Kinematische Gleichungen, d.h. Beschreibungen wie
Radgetriebene Systeme Mobilität, Räder Räder benötigen weniger Energie und erlauben eine schnellere Fortbewegung (auf entsprechendem Terrain) Benötigen Kinematische Gleichungen, d.h. Beschreibungen wie
Zeitrelais PL0045 mit optionaler PC-Anbindung
 Zeitrelais PL0045 Inhaltsverzeichnis 1. Einleitung... 3 2. Eigenschaften... 3 2.1 Grundlegende Eigenschaften... 3 2.2 Optionale Eigenschaften... 3 3. Programmzustände... 4 3.1 Power-on-Reset... 4 3.2 COUNTDOWN-Modus...
Zeitrelais PL0045 Inhaltsverzeichnis 1. Einleitung... 3 2. Eigenschaften... 3 2.1 Grundlegende Eigenschaften... 3 2.2 Optionale Eigenschaften... 3 3. Programmzustände... 4 3.1 Power-on-Reset... 4 3.2 COUNTDOWN-Modus...
Lernen durch Anwendung und Wiederholung
 LS.1 Lernen durch Anwendung und Wiederholung LS.2 Hand-Augen-Koordination LS.3 Modellbildung Planung Aktion Wahrnehmung Langzeitgedächtnis und neuronale Verknüpfungen benötigen Wiederholungen Motorische
LS.1 Lernen durch Anwendung und Wiederholung LS.2 Hand-Augen-Koordination LS.3 Modellbildung Planung Aktion Wahrnehmung Langzeitgedächtnis und neuronale Verknüpfungen benötigen Wiederholungen Motorische
Adaptive Systeme. Prof. Dr.-Ing. Heinz-Georg Fehn Prof. Dr. rer. nat. Nikolaus Wulff
 Adaptive Systeme Evolutionäre Algorithmen Teil II Evolutionsfenster durch Mutation und sexuelle Rekombination Prof. Dr.-Ing. Heinz-Georg Fehn Prof. Dr. rer. nat. Nikolaus Wulff Evolutionäre Algorithmen
Adaptive Systeme Evolutionäre Algorithmen Teil II Evolutionsfenster durch Mutation und sexuelle Rekombination Prof. Dr.-Ing. Heinz-Georg Fehn Prof. Dr. rer. nat. Nikolaus Wulff Evolutionäre Algorithmen
Inhaltsverzeichnis. CD-ROM zum Buch Inhalt der CD-ROM GPL (General Public License) Systemvoraussetzung 13
 Systemvoraussetzung 13") Inhaltsverzeichnis CD-ROM zum Buch 13 1.1 Inhalt der CD-ROM 13 1.2 GPL (General Public License) 13 1.3 Systemvoraussetzung 13 Der Einstieg in die Robotik 15 Mikrocontrolter-Grundlagen 17 3.1 Aufbau und
Inhaltsverzeichnis CD-ROM zum Buch 13 1.1 Inhalt der CD-ROM 13 1.2 GPL (General Public License) 13 1.3 Systemvoraussetzung 13 Der Einstieg in die Robotik 15 Mikrocontrolter-Grundlagen 17 3.1 Aufbau und
Genetische Algorithmen
 Michael Gerhäuser Universität Bayreuth 28.06.2008 1 Motivierende Beispiele 2 Grundbegriffe der biologischen Evolution 3 Formalisierung der Grundbegriffe 4 Modellierung mit Markov-Ketten 5 Konvergenzanalyse
Michael Gerhäuser Universität Bayreuth 28.06.2008 1 Motivierende Beispiele 2 Grundbegriffe der biologischen Evolution 3 Formalisierung der Grundbegriffe 4 Modellierung mit Markov-Ketten 5 Konvergenzanalyse
Implementation und Evaluierung innovativer Heuristiken für die Anordnung von Entwurfsentscheidungen
 Implementation und Evaluierung innovativer Heuristiken für die Anordnung von Entwurfsentscheidungen Diplomarbeit Thomas Scharler Universität Hamburg, FB Informatik, AB Tech Implementation und Evaluierung
Implementation und Evaluierung innovativer Heuristiken für die Anordnung von Entwurfsentscheidungen Diplomarbeit Thomas Scharler Universität Hamburg, FB Informatik, AB Tech Implementation und Evaluierung
3D-Simulation in der Intralogistik
 3D-Simulation in der Intralogistik Siemens Postal, Parcel & Airport Logistics AG Seite 1 siemens.ch/logistics Inhalt 3D Simulation in der Intralogistik Abgrenzung/Definition Animation Simulation Emulation
3D-Simulation in der Intralogistik Siemens Postal, Parcel & Airport Logistics AG Seite 1 siemens.ch/logistics Inhalt 3D Simulation in der Intralogistik Abgrenzung/Definition Animation Simulation Emulation
Computational Intelligence 1 / 28. Computational Intelligence Evolutionsstrategien 3 / 28
 1 / 28 Gliederung 1 Evolutionsstrategien Selektion Rekombination Mutation Ablauf 2 Genetische Programmierung Repräsentation Genetische Operatoren Ablauf Überblick Evolutionsstrategien 3 / 28 Repräsentation
1 / 28 Gliederung 1 Evolutionsstrategien Selektion Rekombination Mutation Ablauf 2 Genetische Programmierung Repräsentation Genetische Operatoren Ablauf Überblick Evolutionsstrategien 3 / 28 Repräsentation
Computational Intelligence
 / 4 Computational Intelligence Wintersemester 007/008 4. Genetische Algorithmen Stefan Berlik Fachgruppe Praktische Informatik FB, Elektrotechnik und Informatik Universität Siegen 5. November 007 Gliederung
/ 4 Computational Intelligence Wintersemester 007/008 4. Genetische Algorithmen Stefan Berlik Fachgruppe Praktische Informatik FB, Elektrotechnik und Informatik Universität Siegen 5. November 007 Gliederung
Learning Expressive Linkage Rules using Genetic Programming
 Learning Expressive Linkage Rules using Genetic Programming R. Isele and C. Bizer Seminarvortrag von Paul Dubs 29. Januar 2013 Fachbereich 20 Seminar aus maschinellem Lernen Paul Dubs 1 Einleitung Problem
Learning Expressive Linkage Rules using Genetic Programming R. Isele and C. Bizer Seminarvortrag von Paul Dubs 29. Januar 2013 Fachbereich 20 Seminar aus maschinellem Lernen Paul Dubs 1 Einleitung Problem
Robot Control. Oxana Paul. Universität Paderborn Seminar Evolutionäre Algotithmen. Prof. Dr. H. Kleine Büning / Oliver Kramer / Chuan-Kang Ting
 Robot Control Oxana Paul Universität Paderborn Seminar Evolutionäre Algotithmen Prof. Dr. H. Kleine Büning / Oliver Kramer / Chuan-Kang Ting Wintersemester 2004/2005 Inhaltsverzeichnis 1.Einleitung...
Robot Control Oxana Paul Universität Paderborn Seminar Evolutionäre Algotithmen Prof. Dr. H. Kleine Büning / Oliver Kramer / Chuan-Kang Ting Wintersemester 2004/2005 Inhaltsverzeichnis 1.Einleitung...
BitTorrent. Rarest-First- und Choke-Algorithmus sind ausreichend. Björn Kalks. Internet Measurment WS 2008/2009
 BitTorrent Rarest-First- und Choke-Algorithmus sind ausreichend Björn Kalks Seminar Internet Measurment WS 2008/2009 Fakultät IV - Elektrotechnik und Informatik Technische Universität Berlin 25. Februar
BitTorrent Rarest-First- und Choke-Algorithmus sind ausreichend Björn Kalks Seminar Internet Measurment WS 2008/2009 Fakultät IV - Elektrotechnik und Informatik Technische Universität Berlin 25. Februar
Werden wir Schoßhunde der Roboter sein? Herbert Stoyan Universität Erlangen
 Werden wir Schoßhunde der Roboter sein?.. Herbert Stoyan Universität Erlangen 1 Schlechte Presse für die KI Große Sprüche der KI in den 80ern Industrielle Umsetzung schien möglich Doch: herber Absturz
Werden wir Schoßhunde der Roboter sein?.. Herbert Stoyan Universität Erlangen 1 Schlechte Presse für die KI Große Sprüche der KI in den 80ern Industrielle Umsetzung schien möglich Doch: herber Absturz
Teamprojekt: Programmierung verteilter eingebetteter Systeme
 Stephan Friedrichs, Henning Günther, Sven Hesse, Oliver Mielentz, Christoph Peltz, Martin Wegner 8. Februar 2008 Inhaltsverzeichnis 1 Ziele 3 1.1 Beschreibung...............................................
Stephan Friedrichs, Henning Günther, Sven Hesse, Oliver Mielentz, Christoph Peltz, Martin Wegner 8. Februar 2008 Inhaltsverzeichnis 1 Ziele 3 1.1 Beschreibung...............................................
Kapitel 4: Zeiger. Inhalt. Zeiger Zeigerarithmetik
 Wintersemester 2005/06 Einführung in die Informatik für Naturwissenschaftler und Ingenieure (alias Einführung in die Programmierung) (Vorlesung) Prof. Dr. Günter Rudolph Fachbereich Informatik Lehrstuhl
Wintersemester 2005/06 Einführung in die Informatik für Naturwissenschaftler und Ingenieure (alias Einführung in die Programmierung) (Vorlesung) Prof. Dr. Günter Rudolph Fachbereich Informatik Lehrstuhl
4. Eine Einführung in Konzept und Arbeitsweise genetischer Algorithmen
 4. Eine Einführung in Konzept und Arbeitsweise genetischer Algorithmen 4.1 Evolution und Genetik Lernprozeß Evolution Die Natur hat es geschafft, aus Milliarden denkbarer Eiweißmoleküle gerade diejenigen
4. Eine Einführung in Konzept und Arbeitsweise genetischer Algorithmen 4.1 Evolution und Genetik Lernprozeß Evolution Die Natur hat es geschafft, aus Milliarden denkbarer Eiweißmoleküle gerade diejenigen
ANT-5 Software Upgrade - Installationshinweise
 ANT-5 Software Upgrade - Installationshinweise Der SDH-Zugangstester ANT-5 von Acterna wird ständig verbessert und weiterentwickelt. Daher stehen regelmäßig neue Funktionen und Optionen zur Verfügung.
ANT-5 Software Upgrade - Installationshinweise Der SDH-Zugangstester ANT-5 von Acterna wird ständig verbessert und weiterentwickelt. Daher stehen regelmäßig neue Funktionen und Optionen zur Verfügung.
Rechnernetze Übung 11
 Rechnernetze Übung 11 Frank Weinhold Professur VSR Fakultät für Informatik TU Chemnitz Juli 2011 Herr Müller (Test GmbH) Sekretärin (Super AG) T-NR. 111 T-NR. 885 Sekretärin (Test GmbH) Herr Meier (Super
Rechnernetze Übung 11 Frank Weinhold Professur VSR Fakultät für Informatik TU Chemnitz Juli 2011 Herr Müller (Test GmbH) Sekretärin (Super AG) T-NR. 111 T-NR. 885 Sekretärin (Test GmbH) Herr Meier (Super
RGB-Sequenzer RS232 RS485 MDX512 AD / IO Platine
 RGB-Sequenzer RS232 RS485 MDX512 AD / IO Platine HARDWARE Platine Osram LED controller 85 x 130 mm, Industriestandard, doppelseitig, Lötstop, Positionsdruck Halterung 4 Bohrlöcher 2,8 mm Durchmesser Ein-
RGB-Sequenzer RS232 RS485 MDX512 AD / IO Platine HARDWARE Platine Osram LED controller 85 x 130 mm, Industriestandard, doppelseitig, Lötstop, Positionsdruck Halterung 4 Bohrlöcher 2,8 mm Durchmesser Ein-
1936 von Alan Turing zum theoretischen Studium der Berechenbarkeit eingeführt Besteht aus
 //5 Abstrakte Maschinenmodelle: Turingmaschine (TM) 96 von Alan Turing zum theoretischen Studium der Berechenbarkeit eingeführt Besteht aus einem festen Teil ( "Hardware ) einem variablen Teil ( "Software
//5 Abstrakte Maschinenmodelle: Turingmaschine (TM) 96 von Alan Turing zum theoretischen Studium der Berechenbarkeit eingeführt Besteht aus einem festen Teil ( "Hardware ) einem variablen Teil ( "Software
R 2 Prototyping. HV 2 Monitor Version 1.2. gmbh. 5. September 2012 INHALT. Übersicht Anschlüsse / Taster Funktionen...
 gmbh Marcellinus Pfeiffer Dorfstrasse 62 CH 8126 Zumikon +41 78 870 2977 m.pfeiffer @ me.com HV 2 Monitor Version 1.2 5. September 2012 INHALT Übersicht... 2 Anschlüsse / Taster... 2 Funktionen... 3 Einstellen
gmbh Marcellinus Pfeiffer Dorfstrasse 62 CH 8126 Zumikon +41 78 870 2977 m.pfeiffer @ me.com HV 2 Monitor Version 1.2 5. September 2012 INHALT Übersicht... 2 Anschlüsse / Taster... 2 Funktionen... 3 Einstellen
Bielefeld Graphics & Geometry Group. Brain Machine Interfaces Reaching and Grasping by Primates
 Reaching and Grasping by Primates + 1 Reaching and Grasping by Primates Inhalt Einführung Theoretischer Hintergrund Design Grundlagen Experiment Ausblick Diskussion 2 Reaching and Grasping by Primates
Reaching and Grasping by Primates + 1 Reaching and Grasping by Primates Inhalt Einführung Theoretischer Hintergrund Design Grundlagen Experiment Ausblick Diskussion 2 Reaching and Grasping by Primates
FACHBEREICH INFORMATIK UND MEDIEN KÜNSTLICHE INTELLIGENZ AMS-PROJEKT
 FACHBEREICH INFORMATIK UND MEDIEN KÜNSTLICHE INTELLIGENZ AMS-PROJEKT Abbildung 1: "SION" - Autonomes Auto Studenten: A. Steve Ngalamo Egoue Daniele Fokam Njilo Prüfer: Prof. Dr.-Ing. Jochen Heinsohn Dipl.-Inform.
FACHBEREICH INFORMATIK UND MEDIEN KÜNSTLICHE INTELLIGENZ AMS-PROJEKT Abbildung 1: "SION" - Autonomes Auto Studenten: A. Steve Ngalamo Egoue Daniele Fokam Njilo Prüfer: Prof. Dr.-Ing. Jochen Heinsohn Dipl.-Inform.
Was ist künstliche Intelligenz?
 Künstliche Intelligenz erobert den Weltraum Künstliche Intelligenz ist ein viel diskutiertes Thema. Die Einsatzmöglichkeiten der künstlichen Intelligenz sind enorm und auch für die Raumfahrt bieten sich
Künstliche Intelligenz erobert den Weltraum Künstliche Intelligenz ist ein viel diskutiertes Thema. Die Einsatzmöglichkeiten der künstlichen Intelligenz sind enorm und auch für die Raumfahrt bieten sich
Programmieren des NXT-Roboters mit LabView 2010
 Programmieren des NXT-Roboters mit LabView 2010 Von Alwin Ebermann 1. Voraussetzungen Der Roboter hat die neueste Firmenware LabView 2010 for NXT ist schon installiert (Testversion hier) 2. Programmieren
Programmieren des NXT-Roboters mit LabView 2010 Von Alwin Ebermann 1. Voraussetzungen Der Roboter hat die neueste Firmenware LabView 2010 for NXT ist schon installiert (Testversion hier) 2. Programmieren
Objektorientierte Programmierung. Agenda für heute, 1. April, Eines der drei wichtigsten Programmierparadigmen
 Agenda für heute, 1. April, 2010 Imperatives vs. objektorientiertes Programmieren Lesen Sie den Begleittext Seite 79 85 Eines der drei wichtigsten Programmierparadigmen (Paradigma: Denkmuster) Imperative
Agenda für heute, 1. April, 2010 Imperatives vs. objektorientiertes Programmieren Lesen Sie den Begleittext Seite 79 85 Eines der drei wichtigsten Programmierparadigmen (Paradigma: Denkmuster) Imperative
Neues vom STRIP Forth-Prozessor
 Neues vom STRIP Forth-Prozessor Tagung der Forth-Gesellschaft März 2014 Bad Vöslau/Österreich Willi Stricker -Prozessor Inhalt 1. STRIP-Befehlssatz Bisher: minimaler Befehlssatz neu: erweiterter Befehlssatz
Neues vom STRIP Forth-Prozessor Tagung der Forth-Gesellschaft März 2014 Bad Vöslau/Österreich Willi Stricker -Prozessor Inhalt 1. STRIP-Befehlssatz Bisher: minimaler Befehlssatz neu: erweiterter Befehlssatz
Messungen mit dem Lichtsensor
 Messungen mit dem Lichtsensor Für die Programmierung eines Roboters, der einer Linie folgt, brauchen wir für die drei Farben die Helligkeitswerte, die dein Lichtsensor jeweils ausgibt. Arbeite dazu folgende
Messungen mit dem Lichtsensor Für die Programmierung eines Roboters, der einer Linie folgt, brauchen wir für die drei Farben die Helligkeitswerte, die dein Lichtsensor jeweils ausgibt. Arbeite dazu folgende
Genetischer Algorithmus
 Genetischer Algorithmus Roger Imbach KBS: Genetischer Algorithmus 1/12 Inhalsverzeichnis Einleitung...3 Was ist ein genetischer Algorithmus?...3 Was machen genetische Algorithmen?...3 Vorgehen...4 Crossover
Genetischer Algorithmus Roger Imbach KBS: Genetischer Algorithmus 1/12 Inhalsverzeichnis Einleitung...3 Was ist ein genetischer Algorithmus?...3 Was machen genetische Algorithmen?...3 Vorgehen...4 Crossover
Spaichinger Entwicklungsumgebung 1.2 Zur C-Programmierung und Simulation von ct-bots (Fahrrobotern)
") Bedienungsanleitung Spaichinger Entwicklungsumgebung 1.2 Zur C-Programmierung und Simulation von ct-bots (Fahrrobotern) Freeware für Microsoft Windows Dr. Markus Ziegler www.spaichinger-schallpegelmesser.de
Bedienungsanleitung Spaichinger Entwicklungsumgebung 1.2 Zur C-Programmierung und Simulation von ct-bots (Fahrrobotern) Freeware für Microsoft Windows Dr. Markus Ziegler www.spaichinger-schallpegelmesser.de
Hindernisumfahrung eines autonomen Roboters in einer unbekannten statischen Umgebung. Ronny Menzel
 Hindernisumfahrung eines autonomen Roboters in einer unbekannten statischen Umgebung. Ronny Menzel Inhalt Aufgabenstellung Begriffserklärung Hindernisumfahrungsstrategien Anforderungen an die Hindernisumfahrung
Hindernisumfahrung eines autonomen Roboters in einer unbekannten statischen Umgebung. Ronny Menzel Inhalt Aufgabenstellung Begriffserklärung Hindernisumfahrungsstrategien Anforderungen an die Hindernisumfahrung