Künstliche Intelligenz
|
|
|
- Luisa Koenig
- vor 8 Jahren
- Abrufe
Transkript

1 Künstliche Intelligenz Vorlesung 9 und 10: Evolutionäre Standardalgorithmen 1/69
2 LERNZIELE Die gängigen Standardalgorithmen, aus der Anfangszeit bis heute, werden vorgestellt. Die bekannten Standardalgorithmen können erläutert und bezüglich der Prinzipien aus Vorlesung 6 und 7 eingeordnet werden. Die einzelnen Verfahren können auf neue Optimierungsprobleme angewandt werden. Die Vielfalt verschiedener evolutionärer Algorithmen und ihrer Abläufe wird verstanden. Dadurch können die Standardalgorithmen voneinander und zu weniger erfolgversprechenden Varianten abgegrenzt werden. 2/69
3 GENETISCHE ALGORITHMEN Genetische Algorithmen (GA, engl. genetic algorithms) sind im Wesentlichen durch eine probabilistische Elternselektion und die Rekombination als primären Suchoperator gekennzeichnet. Die Mutation ist meist nur ein Hintergrundoperator, der nur mit einer geringen Wahrscheinlichkeit zur Anwendung kommt. Er garantiert die Erreichbarkeit aller Punkte im Suchraum und erhält eine Grunddiversität in der Population. 3/69
4 GENETISCHE ALGORITHMEN Es gibt zwei grundsätzlich unterschiedliche Grundalgorithmen. Der Standard-GA GENETISCHER-ALGORITHMUS (s. Vorlesung 7) wurde bereits ausführlich diskutiert. Er ist dadurch charakterisiert, dass am Ende jeder Generation die erzeugten Kindindividuen die Elternpopulation komplett ersetzen. Ein anderer Algorithmus ist der STEADY-STATE-GA Algorithmus mit überlappenden Populationen, der immer nur ein Individuum pro Generation erzeugt und dieses sofort in die Gesamtpopulation integriert, d. h. ein Individuum der Elternpopulation auswählt und dieses durch das neue Individuum ersetzt. 4/69
5 STEADY-STATE GA 5/69
 steady state GA wird jeweils mit einem Ablaufschema verdeutlicht. 6/69")
6 GENETISCHE ALGORITHMEN Abbildung 1: Der unterschiedliche Ablauf des (a) GA und des (b) steady state GA wird jeweils mit einem Ablaufschema verdeutlicht. 6/69
7 GENETISCHE ALGORITHMEN Die beiden formulierten Algorithmen unterscheiden sich in der benutzten Rekombination: Jedes Elternpaar im Standard-GA GENETISCHER-ALGORITHMUS erzeugt zwei Kindindividuen, während im STEADY-STATE-GA insgesamt nur ein Kindindividuum pro Generation erzeugt wird. Beim GA in seiner ursprünglichen Form besteht ein Individuum aus einer binären Zeichenkette, d. h. der Suchraum hat die Form G = B l = {0, 1} l. Es gibt einige Optimierungsprobleme mit einem binären Suchraum, wie z. B. das Rucksackproblem, bei dem aus mehreren Gegenständen eine möglichst wertvolle Menge unter Berücksichtigung der Kapazität des Rucksacks ausgewählt wird, oder das Erfüllungsproblem, bei dem eine Belegung boolescher Variablen gesucht ist, für die eine aussagenlogische Formel wahr ist. 7/69
8 GENETISCHE ALGORITHMEN Für die meisten Optimierungsprobleme ist jedoch eine Kodierung des Lösungsraums in den Raum B l notwendig. Sowohl die standard- binäre als auch die Gray-Kodierung sind hierbei üblich. Als Operationen kommen die BINÄRE-MUTATION sowie einer der Rekombinationsoperatoren EIN-PUNKT- CROSSOVER Algorithmus, UNIFORMER-CROSSOVER Algorithmus oder der K-PUNKT-CROSSOVER als Verallgemeinerung des 1-Punkt-Crossovers zum Einsatz. 8/69
9 K-PUNKT-CROSSOVER 9/69
10 BEISPIEL Bei den binären Zeichenketten und würden durch einen 2-Punkt- Crossover an den Stellen j 1 = 3 und j 2 = 6 die Individuen und entstehen. Meist wird nur ein gewisser Prozentsatz der neuen Individuen durch die Rekombination erzeugt (ein häufiger Richtwert in der Literatur ist ca. 70%). Die restlichen Individuen entstehen nur durch Mutation auf einem Elternindividuum. 10/69

11 Abbildung 2: Häufig benutzte Parameterwerte bei binär kodierten genetischen Algorithmen. 11/69
12 Das bisher beschriebene Verfahren zur Mutation ist für lange Zeichenketten sehr rechenintensiv, da für jede Binärinformation eine Zufallszahl benötigt wird. Die in Algorithmus EFFIZIENTE-BINÄRE-MUTATION beschriebene Methode benutzt stattdessen die Eigenschaft, dass die Abstände zwischen den auftretenden Mutationen in der Zeichenkette geometrisch verteilt sind. Mittels einer Zufallszahl u U([0, 1]) lässt sich der Abstand zur nächsten auftretenden Mutation bestimmen. Falls der Abstand über das Ende des Individuums hinausgeht, wird der uberhang auf das nächste zu mutierende Individuum weitergereicht und bestimmt dort die erste veränderte Position. 12/69
13 EFFIZIENTE-BINÄRE-MUTATION 13/69
14 BEISPIEL Angenommen in dem Individuum A.G = (1, 0, 1, 1, 1, 0, 0, 1, 0, 1) wurde soeben die erste Stelle mutiert, dann gilt next = 1. Nun wird über die Zufallszahl u = 0, 7 das nächste mutierte Bit ermittelt. Mit p m = 0, 1 gilt: ln(0, 7) 0, next = 1+ = 1+ = 1+ 3, = 4. ln(1 0, 1) 0, Daher wird auch das vierte Bit invertiert und es ergibt sich das folgende Individuum (1, 0, 1, 0, 1, 0, 0, 1, 0, 1). 14/69
15 BEISPIEL Wird als nächste Zufallszahl u = 0, 3 gewählt, ergibt sich die nächste Position ln(0, 3) 1, next = 4+ = 4+ = 4+ 11, = 15. ln(1 0, 1) 0, Da dies größer als die Länge des Individuums l = 10 ist, wird next = 15 l = 5 gesetzt und im nächsten Individuum, wird das fünfte Bit verändert. 15/69
16 REELWERTIGE GENETISCHE ALGORITHMEN Mit der Zeit kamen neben der rein binären Kodierung auch andere problemnahere Repräsentationen auf - insbesondere reellwertige Zeichenketten und Permutationen. Im Weiteren werden kurz die speziellen genetischen Operatoren für diese Repräsentationen vorgestellt und zusammengefasst. Bei reellwertigen GAs hat der Suchraum die Form G = R l. Für jede Suchraumdimension i ist ein Intervall [ug i, og i ] vorgegeben, also gilt G = [ug 1, og 1 ] [ug l, og l ]. Durch diese Repräsentation werden Probleme bei der Kodierung vermieden. 16/69
17 REELWERTIGE GENETISCHE ALGORITHMEN Als Rekombinationsoperatoren bieten sich die selben Crossoveroperatoren wie im binären Fall an: EIN-PUNKT-CROSSOVER, UNIFORMER-CROSSOVER und K-PUNKT-CROSSOVER. Allerdings decken diese Operatoren nicht den kompletten Suchraum ab, da keine Zwischenwerte angenommen werden. Daher wird häufig der Operator ARITHMETISCHER-CROSSOVER eingesetzt. 17/69
18 REELWERTIGE GENETISCHE ALGORITHMEN Bei der Mutation kann nicht mehr einfach eine Informationseinheit invertiert werden, stattdessen wird mit einer gewissen Wahrscheinlichkeit auf jede Komponente des Individuums ein zufälliger gleichverteilter Wert addiert. Die GLEICHVERTEILTE-REELLWERTIGE-MUTATION wird auch als Kriechmutation (engl. creep mutation) bezeichnet, da im Gegensatz zur GAUSS-MUTATION die Schrittweite beschränkt ist. 18/69
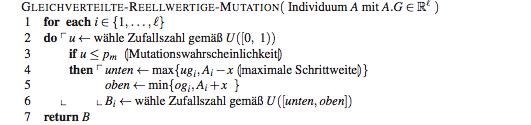
19 GLEICHVERTEILTE-REELLWERTIGE- MUTATION 19/69
20 KOMBINATORISCHE SUCHPROBLEME Für kombinatorische Probleme werden oft Permutationen, d. h. G = S l, als Genotyp benutzt. Die Mutation ist in der Regel die wichtigere Operation. Bislang wurden die INVERTIERENDE-MUTATION und die VERTAUSCHENDE-MUTATION ausführlich vorgestellt. Eine Alternative ist die VERSCHIEBENDE-MUTATION, die eine Zahl aus der Permutation entfernt und an einer beliebigen Stelle wieder einfügt. 20/69
21 VERSCHIEBENDE-MUTATION 21/69
22 BEISPIEL Beispielsweise produziert die VERSCHIEBENDE-MUTATION mit den Zufallszahlen u 1 = 3 und u 2 = 6 aus dem Individuum (1, 2, 3, 4, 5, 6, 7) das Individuum (1, 2, 4, 5, 6, 3, 7). 22/69
23 MISCHENDE MUTATION Eine weitere Möglichkeit besteht in dem zufälligen Umsortieren eines Teils der Permutation wie in Algorithmus MISCHENDE-MUTATION. 23/69

24 MISCHENDE-MUTATION 24/69
25 BEISPIEL Die MISCHENDE-MUTATION wird mit den Schnittpunkten u 1 = 3 und u 2 = 6 aus dem Individuum (1, 2, 3, 4, 5, 6, 7) beispielsweise das Individuum (1, 2, 5, 3, 6, 4, 7) oder jede andere beliebige Anordnung der markierten Ziffern. Verglichen mit den anderen vorgestellten Mutationsoperatoren für Permutationen verändert dieser zuletzt vorgestellte Operator ein Individuum relativ stark. 25/69
26 REKOMBINATIONSOPERATOREN Während Mutationsoperatoren relativ leicht auf Permutationen definiert werden, ist es sehr viel schwieriger passende Rekombinationsoperatoren zu formulieren, da bei jeder Anwendung eine gültige Permutation entstehen muss. Wir haben bislang die KANTENREKOMBINATION und die ORDNUNGSREKOMBINATION eingeführt. Eine dritte Möglichkeit stellt die ABBILDUNGSREKOMBINATION dar, die einige Werte von einem Elternindividuum übernimmt und die restlichen gemäß einer partiellen Abbildung zwischen den beiden Elternindividuen ermittelt. 26/69
27 ABBILDUNGSREKOMBINATION 27/69
28 BEISPIEL In der ABBILDUNGSREKOMBINATION werden die Elternindividuen A = (1, 4, 6, 5, 7, 2, 3) und B = (1, 2, 3, 4, 5, 6, 7) an den Schnittpunkten 2 und 4 miteinander rekombiniert, d. h. es werden vom zweiten Individuum (x, 2, 3, 4, x, x, x) übernommen. Nun definieren wir eine Abbildung g zwischen den Werten des ersten und des zweiten Individuums, indem dem Wert A.G k der Wert B.G k zugeordnet wird: i= g(i)= /69
29 BEISPIEL Für jede noch unbesetzte Position des Kindindividuums prüfen wir nun, ob der Wert des ersten Elternteils an dieser Stelle übernommen werden kann - falls nicht wird der Wert gemäß der Abbildung durch den Bildwert ersetzt. An der ersten noch freie Position des Nachkommens kann 1 aus dem Individuum A übernommen werden, da kein Konflikt dadurch entsteht, ebenso 7 an der fünften Position. Sowohl 2 als auch 3 sind jedoch bereits vom Individuum B übernommen worden. 2 kann gemäß der Abbildung durch 6 ersetzt werden. item Bei 3 würde die Abbildung auf 7 verweisen, diese Zahl wurde jedoch bereits von A übernommen. In diesem Falle iterieren wir die Abbildung erneut und erhalten die 5 für die fehlende Stelle. Also resultiert insgesamt das Individuum (1, 2, 3, 4, 7, 6, 5). 29/69
30 ABBILDUNGSREKOMBINATION Dieser Operator hat den Vorteil, dass er möglichst viele Werte an ihren ursprünglichen Stellen belässt und mögliche Konflikte durch eine schnelle Technik auflöst. Es lässt sich auch leicht eine Variante mit zwei Kindindividuen formulieren. 30/69
31 EVOLUTIONSSTRATEGIEN Bei den Evolutionsstrategien (ES) ist der Genotyp der Individuen grundsätzlich immer reellwertig, also gilt A.G G = R l oder analog zu den reellwertigen genetischen Algorithmen G = [ug 1, og 1 ] [ug l, og l ] R l. In der Literatur wird meist davon ausgegangen, dass der Genotyp exakt einem reellwertigen Phänotyp entspricht - es gibt allerdings auch Beispiele, bei denen die reellen Zahlen als Kodierung für einen anderen Raum aufgefasst werden (z. B. für Permutationen). 31/69
32 EVOLUTIONSSTRATEGIEN Die Evolutionsstrategie verzichtet auf Selektionsdruck bei der Auswahl der Eltern: Diese werden gleichverteilt zufällig gewählt. Stattdessen überleben in der Umweltselektion nur die besten Individuen durch die BESTEN-SELEKTION. Wird der Algorithmus nur auf die erzeugten Kindindividuen angewandt, spricht man von der Komma-Selektion (µ, λ)-es. Dabei werden aus µ Eltern λ(> µ) Kinder erzeugt, die im Rahmen der Umweltselektion wieder auf die µ besten Individuen reduziert werden. 32/69
33 EVOLUTIONSSTRATEGIEN Im Gegensatz zum genetischen Algorithmus ist bei der Evolutionsstrategie die Mutation der primäre Operator. In den ersten Implementationen wurde die Rekombination überhaupt nicht benutzt. Daher muss der Mutationsoperator gleichzeitig sowohl die Feinabstimmung als auch die Erforschung garantieren. Hierfür ist die GAUSS-MUTATION besonders gut geeignet, da vornehmlich kleine Veränderungen vorgenommen werden, aber auch beliebig große Mutationen mit einer kleinen Wahrscheinlichkeit möglich sind. 33/69
34 EVOLUTIONSSTRATEGIEN Wie man sich leicht veranschaulichen kann, hängt der Erfolg (z. B. das überwinden von lokalen Optima) ebenso wie die Konvergenzgeschwindigkeit direkt von der erwarteten Schrittweite der Mutation ab. Diese wird durch die Standardabweichung σ als Schrittweitenparameter bestimmt. Wird der Wert σ klein gewählt, werden kleine Schritte im Suchraum durchgeführt, bei großem σ große Schritte. 34/69
35 ANPASSUNGSSTRATEGIEN FÜR EVOLUTIONÄRE OPERATOREN Die GAUSS-MUTATION eignet sich besonders gut für eine Anpassung, da mit dem Parameter σ ein einfacher Regler zur Verfügung steht, mit dem die Kindindividuen unterschiedlich stark im genotypischen Raum gestreut werden können. 35/69
36 ANPASSUNG DES PARAMETERS σ 36/69

37 ANPASSUNG DES PARAMETERS σ MIT DER SOG. 1/5 -ERFOLGSREGEL 37/69
38 Es wird ein Kriterium für die Beurteilung des aktuellen Stands der Optimierung und eine Regel benötigt, die daraus die notwendigen Veränderungen ableitet. p s Erfolgsrate welche dem Anteil der Mutationen entspricht, die in den letzten k Generationen eine Verbesserung bewirkt haben. Je kleiner p s ist, desto näher ist man am Optimum und desto lokaler muss die Mutation werden. Der Schwellwert θ legt fest, wann σ verkleinert bzw. vergrößert wird. Solche Verfahren werden als adaptiv bezeichnet. 38/69
39 SELBSTADAPTATION Für beliebige Parameter eines Algorithmus ist es dennoch eine schwierige Aufgabe, die Anpassungsregeln so zu formulieren, dass alle möglichen Situationen im Verlauf einer Suche sinnvoll berücksichtigt werden. Auch der vorhin vorgestellte Algorithmus hat Mängel bei andersgearteten Problemen - bei vielen lokalen Optima tendiert er zur vorzeitigen Konvergenz. 39/69
40 SELBSTADAPTATION Man wünscht sich eine individuellere und flexiblere Anpassung der Parameter, was durch die dritte Technik, die Selbstadaptation, möglich ist. Jedes Individuum wird um Kontrollparameter ergänzt. Vereinfacht dargestellt merken sich diese sog. Strategieparameter für jedes Individuum, mit welchen Einstellungen es entstanden ist. Diese Information dient als Grundlage für die Mutationen der nächsten Generation. Der einfachste Ansatz, die SELBSTADAPTIVE-GAUSS-MUTATION, benutzt einen Strategieparameter A.S 1 = σ und unterwirft die Veränderung der Strategieparameter ebenfalls einer zufälligen Evolution. 40/69

41 SELBSTADAPTIVE-GAUSS-MUTATION 41/69
42 Techniken zur Anpassung nicht nur die Schrittweite des Mutationsoperators beeinflussen können. Es gibt in der Literatur auch Varianten der drei Anpassungsstrategien, welche beispielsweise die Repräsentation der Individuen, die Gütefunktion, den Selektionsoperator oder die Populationsgröße verändern. 42/69
43 SELBSTADAPTATION Die 1/5 -Erfolgsregel ermittelt aufgrund von statistischen Erhebungen in den letzten Generationen einen neuen Wert σ für die gesamte Population. ES-ADAPTIV Algorithmus beschreibt die komplette Evolutionsstrategie mit Mutation und einer Komma-Selektion. Für eine Plus-Selektion wird in Zeile 7 P mit P(t) initialisiert. 43/69
44 ES-ADAPTIV 44/69
45 SELBSTADAPTATION Die Selbstadaptation unterwirft die Schrittweite als Strategieparameter in jedem Individuum ebenfalls dem Evolutionsprozess. Hier unterscheidet man drei Varianten. 45/69

46 ES-SELBSTADAPTIV 46/69
47 EVOLUTIONÄRES PROGRAMMIEREN Das evolutionäre Programmieren (EP, engl. evolutionary programming) ist durch die Grundidee geprägt, die Evolution auf einer mehr verhaltensbestimmten Ebene nachzubilden, d. h. es wird kein Wert darauf gelegt, die Genetik zu berücksichtigen. Bei den Nachkommen ist lediglich ihre phänotypisch beobachtbare Ähnlichkeit zu einem Elternteil von Interesse. Daher wird in EP kein Rekombinationsoperator benutzt und die Repräsentation möglichst problemnah gewählt. 47/69
48 EVOLUTIONÄRES PROGRAMMIEREN Der Ausgangspunkt für die Entwicklung des evolutionären Programmierens war das Problem der Zeitreihenprognose. Es gibt zwei Standardverfahren des evolutionären Programmierens, die jeweils die Modellierungstechniken der künstlichen Intelligenz ihrer Zeit reflektieren: Der Ansatz der 1960er Jahre benutzt endliche Automaten und der Ansatz der 1980er Jahre neuronale Netze. 48/69
49 EVOLUTIONÄRES PROGRAMMIEREN In den ersten Algorithmen wurde eine Population von endlichen Automaten benutzt. Bei der Zeitreihenprognose muss in diskreten Schritten jeweils der nächste Wert der Zeitreihe vorhergesagt werden, d. h. ein endlicher Automat bestimmt aus seinem internen Zustand und dem aktuellen Wert der Zeitreihe sowohl die Prognose für den nächsten Wert der Zeitreihe als auch den neuen internen Zustand des Automaten. Die simulierte Evolution soll die Prognosefähigkeiten der Automaten verbessern. 49/69
50 ENDLICHER AUTOMAT Definition Formal ist ein endlicher Automat ein Tupel (Q, Start, Σ, übergang, Ausgabe). Dabei ist Q eine endliche Menge der möglichen Zustände, Start Q der Startzustand, Σ das Eingabeund Ausgabealphabet, übergang: Q Σ Q eine übergangsfunktion, sowie Ausgabe: Q Σ Σ eine Ausgabefunktion. Die übergangsfunktion berechnet für jedes mögliche Eingabesymbol abhängig vom aktuellen Zustand des Automaten den neuen Zustand, die Ausgabefunktion ein Ausgabesymbol. Die Ausgabe des Automaten wird in jedem Zeitschritt als Prognose für das nächste Eingabesymbol interpretiert. 50/69
51 BEISPIEL Sei ein Beispielautomaten mit Q = {q 0, q 1, q 2 } und Σ = {0, 1, 2, 3}. Angenommen der Automat befindet sich im Zustand q 0 und der letzte Wert der Zeitreihe war eine 1. Dann ergibt sich für die Zeitreihe 0, 2, 3, 1, 2 die folgende Vorhersage 51/69
52 ENDLICHER AUTOMAT Abbildung 3: Graphische Darstellung eines endlichen Automaten mit drei Zuständen. An den übergängen bezeichnet der erste Wert das Eingabesymbol und der zweite Wert das Ausgabesymbol. 52/69
53 ENDLICHER AUTOMAT Abbildung 4: Der beispielhafter Ablauf für die Prognose mit dem oben dargestellten Automaten zeigt, dass drei von fünf Prognosewerten richtig waren (unterstrichen). 53/69
54 ENDLICHER AUTOMAT Da für eine Zeitreihe das Alphabet Σ fest vorgegeben ist, enthält der Genotyp die restliche Information des Tupels: A.G = (Q, übergang, Ausgabe, Start). Die Funktionen können als Tabelle gespeichert werden. Es wird keine Zusatzinformation A.S benötigt, d.h. Z = { }. 54/69
55 VARIATION VON ENDLICHEN AUTOMATEN AUTOMATENMUTATION-AUSGABE:Die Ausgabe wird an einer Stelle in der Übergangstabelle verändert. AUTOMATENMUTATION-FOLGEZUSTAND:Ein Folgezustand wird durch einen zufällig neu gewählten Eintrag in der Übergangstabelle ersetzt. AUTOMATENMUTATION-NEUER-ZUSTAND:Ein neuer Zustand wird zur Menge Q hinzugefügt und ein Übergang aus der alten Zustandsmenge in den neuen Zustand eingerichtet. AUTOMATENMUTATION-ZUSTAND-LÖSCHEN: Ein Zustand wird gelöscht und alle Übergänge, die in diesen Zustand geführt haben, werden umgesetzt. AUTOMATENMUTATION-STARTZUSTAND: Ein neuer Startzustand wird gewählt 55/69
56 VARIATION VON ENDLICHEN AUTOMATEN 56/69
57 VARIATION VON ENDLICHEN AUTOMATEN Abbildung 5: AUTOMATENMUTATION-AUSGABE: Änderung der Ausgabe für (q 0, 1). 57/69

58 VARIATION VON ENDLICHEN AUTOMATEN 58/69
59 VARIATION VON ENDLICHEN AUTOMATEN Abbildung 6: AUTOMATENMUTATION-FOLGEZUSTAND: Änderung des Folgezustands für (q 1, 0). 59/69
60 VARIATION VON ENDLICHEN AUTOMATEN 60/69
61 VARIATION VON ENDLICHEN AUTOMATEN Abbildung 7: AUTOMATENMUTATION-NEUER-ZUSTAND: Hinzufügen des Zustands q 3, seinen Übergängen und Ausgaben sowie einen Übergang von q 2 nach q 3. 61/69
62 VARIATION VON ENDLICHEN AUTOMATEN 62/69
63 VARIATION VON ENDLICHEN AUTOMATEN Abbildung 8: AUTOMATENMUTATION-ZUSTAND-LÖSCHEN: Löschen des Zustands q 1 und Reparatur der Übergänge für (q 0, 1) und (q 2, 3). 63/69
64 VARIATION VON ENDLICHEN AUTOMATEN 64/69
65 VARIATION VON ENDLICHEN AUTOMATEN Abbildung 9: AUTOMATENMUTATION-STARTZUSTAND: Wechsel des Startzustands von q 0 nach q 1. 65/69
66 EP REKOMBINATIONSOPERATOR Die Erfinder von EP hatten konzeptionell auch einen Rekombinationsoperator vorgesehen, der im wesentlich aus mehreren Automaten mittels einer Potenzmengenkonstruktion einen Automaten durch die Vereinigung der Elternautomaten berechnet. Dieser Operator wurde jedoch nicht im- plementiert vermutlich aus Effizienzgründen, da zur damaligen Zeit die Rechnerleistung noch stark beschränkt war. 66/69
67 EVOLUTIONÄRES-PROGRAMMIEREN Im Gesamtalgorithmus EVOLUTIONÄRES-PROGRAMMIEREN-1960ER des ursprünglichen EP wird für jedes Individuum aus der aktuellen Population durch einen der Mutationsoperatoren ein neues Kindindividuum erzeugt. Gemäß der Plus-Selektion (µ + µ) wird die bessere Hälfte der Eltern und der Kindindividuen durch die Umweltselektion übernommen. Häufig ist die Populationsgröße zwischen Individuen. 67/69
68 EVOLUTIONÄRES-PROGRAMMIEREN 68/69
69 EVOLUTIONÄRES PROGRAMMIEREN Mit dem Wechsel von endlichen Automaten als Vorhersagemodell zu neuronalen Netzen ändert sich der genotypische Suchraum vollständig. Künstliche neuronale Netze gehen auf die Modellierung von natürlichen Neuronen zurück, wie sie z. B. im Gehirn vorliegen. Ein einfaches Modell sind Perzeptronen mit mehreren Schichten (auch Feedforward-Netze genannt). Wir kommen später noch auf dieses Modell zurück. 69/69
Populationsbasierte Suche. Evolutionäre Algorithmen (1)
") Populationsbasierte Suche Bisherige Meta-Heuristiken: Simulated Annealing Tabu Search Ausgehend von einer Lösung wird gesucht Populationsbasierte Heuristiken Suche erfolgt ausgehend von mehreren Lösungen
Populationsbasierte Suche Bisherige Meta-Heuristiken: Simulated Annealing Tabu Search Ausgehend von einer Lösung wird gesucht Populationsbasierte Heuristiken Suche erfolgt ausgehend von mehreren Lösungen
InformatiCup 2009 EvolutionConsole
 InformatiCup 2009 EvolutionConsole Wilhelm Büchner Hochschule 19. März 2010 1 1. Das Team Teammitglieder Ralf Defrancesco KION Information Services GmbH Systemadministrator Daniel Herken Scooter Attack
InformatiCup 2009 EvolutionConsole Wilhelm Büchner Hochschule 19. März 2010 1 1. Das Team Teammitglieder Ralf Defrancesco KION Information Services GmbH Systemadministrator Daniel Herken Scooter Attack
Optimale Produktliniengestaltung mit Genetischen Algorithmen
 Optimale Produktliniengestaltung mit Genetischen Algorithmen 1 Einleitung 2 Produktlinienoptimierung 3 Genetische Algorithmen 4 Anwendung 5 Fazit Seite 1 Optimale Produktliniengestaltung mit Genetischen
Optimale Produktliniengestaltung mit Genetischen Algorithmen 1 Einleitung 2 Produktlinienoptimierung 3 Genetische Algorithmen 4 Anwendung 5 Fazit Seite 1 Optimale Produktliniengestaltung mit Genetischen
Hauptseminar Repräsentationen für Optimierungsalgorithmen
 Stefan Bens Hauptseminar Dresden, 03.07.2008 Inhalt 1. Motivation 2. Einleitung 3. Repräsentationsarten und Eigenschaften 4. Beispiel 5. Zusammenfassung Folie 2 Als Repräsentation bezeichnet man die Kodierung
Stefan Bens Hauptseminar Dresden, 03.07.2008 Inhalt 1. Motivation 2. Einleitung 3. Repräsentationsarten und Eigenschaften 4. Beispiel 5. Zusammenfassung Folie 2 Als Repräsentation bezeichnet man die Kodierung
Evolutionäre Algorithmen - Kapitel 15
 Evolutionäre Algorithmen - Kapitel 15 Metaheuristiken Prof. Dr. Rudolf Kruse ÖÙ Û º ºÙÒ ¹Ñ ÙÖ º Fakultät für Informatik Otto-von-Guericke-Universität Magdeburg 9. Juni 2008 R. Kruse (Uni Magdeburg) Metaheuristiken
Evolutionäre Algorithmen - Kapitel 15 Metaheuristiken Prof. Dr. Rudolf Kruse ÖÙ Û º ºÙÒ ¹Ñ ÙÖ º Fakultät für Informatik Otto-von-Guericke-Universität Magdeburg 9. Juni 2008 R. Kruse (Uni Magdeburg) Metaheuristiken
Survival of the Fittest Optimierung mittels Genetischer Algorithmen
 Übung zu Organic Computing Survival of the Fittest Optimierung mittels Genetischer Algorithmen Sabine Helwig Lehrstuhl für Informatik 12 (Hardware-Software-Co-Design) Universität Erlangen-Nürnberg [email protected]
Übung zu Organic Computing Survival of the Fittest Optimierung mittels Genetischer Algorithmen Sabine Helwig Lehrstuhl für Informatik 12 (Hardware-Software-Co-Design) Universität Erlangen-Nürnberg [email protected]
Genetische und Evolutionäre Algorithmen (Vol. 1)
") Vortrag über Genetische und Evolutionäre Algorithmen (Vol. ) von Adam El Sayed Auf und Kai Lienemann Gliederung: ) Einführung 2) Grundkonzept 3) Genaue Beschreibung des Genetischen Algorithmus Lösungsrepräsentation
Vortrag über Genetische und Evolutionäre Algorithmen (Vol. ) von Adam El Sayed Auf und Kai Lienemann Gliederung: ) Einführung 2) Grundkonzept 3) Genaue Beschreibung des Genetischen Algorithmus Lösungsrepräsentation
Evolutionsstrategien
 Evolutionsstrategien zum Seminar Evolutionäre Algorithmen von Jana Schäfer INHALTVERZEICHNIS 1. Einführung... 3 2. Die Geschichte der Evolutionsstrategien...4 3. Grundlegendes... 6 3.1 Begriffe... 6 3.2
Evolutionsstrategien zum Seminar Evolutionäre Algorithmen von Jana Schäfer INHALTVERZEICHNIS 1. Einführung... 3 2. Die Geschichte der Evolutionsstrategien...4 3. Grundlegendes... 6 3.1 Begriffe... 6 3.2
Einführung in die Methoden der Künstlichen Intelligenz. Evolutionäre Algorithmen
 Einführung in die Methoden der Künstlichen Intelligenz Evolutionäre Algorithmen Dr. David Sabel WS 2012/13 Stand der Folien: 12. November 2012 Evolutionäre / Genetische Algorithmen Anwendungsbereich: Optimierung
Einführung in die Methoden der Künstlichen Intelligenz Evolutionäre Algorithmen Dr. David Sabel WS 2012/13 Stand der Folien: 12. November 2012 Evolutionäre / Genetische Algorithmen Anwendungsbereich: Optimierung
2. Von der Evolution zur Optimierung
 2. Von der Evolution zur Optimierung Die Prinzipien der biologischen Evolution werden auf die Optimierung übertragen. Am Beispiel wird ein erster evolutionärer Algorithmus zur Optimierung konstruiert und
2. Von der Evolution zur Optimierung Die Prinzipien der biologischen Evolution werden auf die Optimierung übertragen. Am Beispiel wird ein erster evolutionärer Algorithmus zur Optimierung konstruiert und
Genetische Algorithmen
 Genetische Algorithmen Von Valentina Hoppe und Jan Rörden Seminar: Künstliche Intelligenz II Dozent: Stephan Schwiebert Gliederung Biologische Evolution Genetischer Algorithmus Definition theoretischer
Genetische Algorithmen Von Valentina Hoppe und Jan Rörden Seminar: Künstliche Intelligenz II Dozent: Stephan Schwiebert Gliederung Biologische Evolution Genetischer Algorithmus Definition theoretischer
Künstliche Intelligenz
 Künstliche Intelligenz Vorlesung 6: Evolutionäre Algorithmen 1/74 NATÜRLICHE EVOLUTION Grundverständnis für die Zusammenhänge und die Komplexität der natürlichen Evolution mit dem Ziel deren Nachahmung
Künstliche Intelligenz Vorlesung 6: Evolutionäre Algorithmen 1/74 NATÜRLICHE EVOLUTION Grundverständnis für die Zusammenhänge und die Komplexität der natürlichen Evolution mit dem Ziel deren Nachahmung
Warum konvergieren Genetische Algorithmen gegen ein Optimum?
 1 / 21 Gliederung 1 Das Schematheorem Motivation Begriffe Herleitung Ergebnis Das Schematheorem Das Schematheorem Motivation 3 / 21 Warum konvergieren Genetische Algorithmen gegen ein Optimum? Theoretische
1 / 21 Gliederung 1 Das Schematheorem Motivation Begriffe Herleitung Ergebnis Das Schematheorem Das Schematheorem Motivation 3 / 21 Warum konvergieren Genetische Algorithmen gegen ein Optimum? Theoretische
Computational Intelligence 1 / 20. Computational Intelligence Künstliche Neuronale Netze Perzeptron 3 / 20
 Gliederung / Künstliche Neuronale Netze Perzeptron Einschränkungen Netze von Perzeptonen Perzeptron-Lernen Perzeptron Künstliche Neuronale Netze Perzeptron 3 / Der Psychologe und Informatiker Frank Rosenblatt
Gliederung / Künstliche Neuronale Netze Perzeptron Einschränkungen Netze von Perzeptonen Perzeptron-Lernen Perzeptron Künstliche Neuronale Netze Perzeptron 3 / Der Psychologe und Informatiker Frank Rosenblatt
Genetische Algorithmen. Uwe Reichel IPS, LMU München 8. Juli 2008
 Genetische Algorithmen Uwe Reichel IPS, LMU München [email protected] 8. Juli 2008 Inhalt Einführung Algorithmus Erweiterungen alternative Evolutions- und Lernmodelle Inhalt 1 Einführung
Genetische Algorithmen Uwe Reichel IPS, LMU München [email protected] 8. Juli 2008 Inhalt Einführung Algorithmus Erweiterungen alternative Evolutions- und Lernmodelle Inhalt 1 Einführung
Algorithmen für schwierige Optimierungsprobleme Vorlesung für den Bereich Bachelor Informatik
 Algorithmen für schwierige Optimierungsprobleme Vorlesung für den Bereich Bachelor Informatik Dozent: Prof. Dr. Henning Meyerhenke Paralleles Rechnen, Fakultät für Informatik 1 KIT Universität des Landes
Algorithmen für schwierige Optimierungsprobleme Vorlesung für den Bereich Bachelor Informatik Dozent: Prof. Dr. Henning Meyerhenke Paralleles Rechnen, Fakultät für Informatik 1 KIT Universität des Landes
2.6 Verdeutlichung verwendeter Begriffe
 2.6 Verdeutlichung verwendeter Begriffe endlich/finit: die Mengen der Zustände und der Ein- bzw. Ausgabezeichen sind endlich synchron: die Ausgabezeichen erscheinen synchron mit dem Einlauf der Eingabezeichen
2.6 Verdeutlichung verwendeter Begriffe endlich/finit: die Mengen der Zustände und der Ein- bzw. Ausgabezeichen sind endlich synchron: die Ausgabezeichen erscheinen synchron mit dem Einlauf der Eingabezeichen
Exkurs Modelle und Algorithmen
 Exkurs Modelle und Algorithmen Ansatz künstlich neuronaler Netze (KNN) Versuch, die Wirkungsweise menschlicher Gehirnzellen nachzubilden dabei wird auf formale mathematische Beschreibungen und Algorithmen
Exkurs Modelle und Algorithmen Ansatz künstlich neuronaler Netze (KNN) Versuch, die Wirkungsweise menschlicher Gehirnzellen nachzubilden dabei wird auf formale mathematische Beschreibungen und Algorithmen
Grundlagen und Basisalgorithmus
 Grundlagen und Basisalgorithmus Proseminar -Genetische Programmierung- Dezember 2001 David König Quelle: Kinnebrock W.: Optimierung mit genetischen und selektiven Algorithmen. München, Wien: Oldenbourg
Grundlagen und Basisalgorithmus Proseminar -Genetische Programmierung- Dezember 2001 David König Quelle: Kinnebrock W.: Optimierung mit genetischen und selektiven Algorithmen. München, Wien: Oldenbourg
Die mathematische Seite
 Kellerautomaten In der ersten Vorlesung haben wir den endlichen Automaten kennengelernt. Mit diesem werden wir uns in der zweiten Vorlesung noch etwas eingängiger beschäftigen und bspw. Ansätze zur Konstruktion
Kellerautomaten In der ersten Vorlesung haben wir den endlichen Automaten kennengelernt. Mit diesem werden wir uns in der zweiten Vorlesung noch etwas eingängiger beschäftigen und bspw. Ansätze zur Konstruktion
EVOLUTION STRATEGIES DANIELA SCHACHERER SEMINAR: IST KÜNSTLICHE INTELLIGENZ GEFÄHRLICH? SOMMERSEMESTER 2017
 EVOLUTION STRATEGIES DANIELA SCHACHERER SEMINAR: IST KÜNSTLICHE INTELLIGENZ GEFÄHRLICH? SOMMERSEMESTER 2017 Inhalt Einleitung und Überblick Evolutionsstrategien Grundkonzept Evolutionsstrategien als Alternative
EVOLUTION STRATEGIES DANIELA SCHACHERER SEMINAR: IST KÜNSTLICHE INTELLIGENZ GEFÄHRLICH? SOMMERSEMESTER 2017 Inhalt Einleitung und Überblick Evolutionsstrategien Grundkonzept Evolutionsstrategien als Alternative
8.1 Einleitung. Grundlagen der Künstlichen Intelligenz. 8.1 Einleitung. 8.2 Lokale Suchverfahren. 8.3 Zusammenfassung. Suchprobleme: Überblick
 Grundlagen der Künstlichen Intelligenz 5. April 0 8. Suchalgorithmen: Lokale Suche Grundlagen der Künstlichen Intelligenz 8. Suchalgorithmen: Lokale Suche 8.1 Einleitung Malte Helmert Universität Basel
Grundlagen der Künstlichen Intelligenz 5. April 0 8. Suchalgorithmen: Lokale Suche Grundlagen der Künstlichen Intelligenz 8. Suchalgorithmen: Lokale Suche 8.1 Einleitung Malte Helmert Universität Basel
Perzeptronen. Lehrstuhl für Künstliche Intelligenz Institut für Informatik Friedrich-Alexander-Universität Erlangen-Nürnberg
 Perzeptronen Lehrstuhl für Künstliche Intelligenz Institut für Informatik Friedrich-Alexander-Universität Erlangen-Nürnberg (Lehrstuhl Informatik 8) Perzeptronen 1 / 22 Gliederung 1 Schwellwert-Logik (MCCULLOCH-PITTS-Neuron)
Perzeptronen Lehrstuhl für Künstliche Intelligenz Institut für Informatik Friedrich-Alexander-Universität Erlangen-Nürnberg (Lehrstuhl Informatik 8) Perzeptronen 1 / 22 Gliederung 1 Schwellwert-Logik (MCCULLOCH-PITTS-Neuron)
Einführung in die Informatik
 Universität Innsbruck - Institut für Informatik Datenbanken und Informationssysteme Prof. Günther Specht, Eva Zangerle 24. November 28 Einführung in die Informatik Übung 7 Allgemeines Für die Abgabe der
Universität Innsbruck - Institut für Informatik Datenbanken und Informationssysteme Prof. Günther Specht, Eva Zangerle 24. November 28 Einführung in die Informatik Übung 7 Allgemeines Für die Abgabe der
Polynomielle Verifizierer und NP
 Polynomielle Verifizierer und NP Definition Polynomieller Verifizierer Sei L Σ eine Sprache. Eine DTM V heißt Verifizierer für L, falls V für alle Eingaben w Σ hält und folgendes gilt: w L c Σ : V akzeptiert
Polynomielle Verifizierer und NP Definition Polynomieller Verifizierer Sei L Σ eine Sprache. Eine DTM V heißt Verifizierer für L, falls V für alle Eingaben w Σ hält und folgendes gilt: w L c Σ : V akzeptiert
Einige Beispiele zur Turingmaschine
 Einige Beispiele zur Turingmaschine Beispiel 1: Addition von 1 zu einer Dualzahl Aufgabe: Auf dem Eingabe-Band einer Turingmaschine steht eine Dualzahl (= Binärzahl, bestehend aus 0-en und 1-en, links
Einige Beispiele zur Turingmaschine Beispiel 1: Addition von 1 zu einer Dualzahl Aufgabe: Auf dem Eingabe-Band einer Turingmaschine steht eine Dualzahl (= Binärzahl, bestehend aus 0-en und 1-en, links
Vorbemerkungen. Die Programmieroberfläche des ClassPad
 Vorbemerkungen Erfahrungen zeigen, dass die Programmiermöglichkeiten des ClassPad im Unterricht kaum genutzt werden. Dabei bieten aus unserer Sicht viele Situationen die Gelegenheit, die Programmieroberfläche
Vorbemerkungen Erfahrungen zeigen, dass die Programmiermöglichkeiten des ClassPad im Unterricht kaum genutzt werden. Dabei bieten aus unserer Sicht viele Situationen die Gelegenheit, die Programmieroberfläche
Genetische Algorithmen
 Genetische Algorithmen Shawn Keen Zusammenfassung Eine weitere Herangehensweise an das maschinelle Lernen ist die Nachahmung evolutionärer Prozesse. Hier wollen wir uns mit den sogenannten Genetischen
Genetische Algorithmen Shawn Keen Zusammenfassung Eine weitere Herangehensweise an das maschinelle Lernen ist die Nachahmung evolutionärer Prozesse. Hier wollen wir uns mit den sogenannten Genetischen
Computational Intelligence
 Vorlesung Computational Intelligence Stefan Berlik Raum H-C 80 Tel: 027/70-267 email: [email protected] Inhalt Überblick Rückblick Optimierungsprobleme Optimierungsalgorithmen Vorlesung Computational
Vorlesung Computational Intelligence Stefan Berlik Raum H-C 80 Tel: 027/70-267 email: [email protected] Inhalt Überblick Rückblick Optimierungsprobleme Optimierungsalgorithmen Vorlesung Computational
Proseminar Komplexitätstheorie P versus NP Wintersemester 2006/07. Nichtdeterministische Turingmaschinen und NP
 Proseminar Komplexitätstheorie P versus NP Wintersemester 2006/07 Vortrag am 17.11.2006 Nichtdeterministische Turingmaschinen und NP Yves Radunz Inhaltsverzeichnis 1 Wiederholung 3 1.1 Allgemeines........................................
Proseminar Komplexitätstheorie P versus NP Wintersemester 2006/07 Vortrag am 17.11.2006 Nichtdeterministische Turingmaschinen und NP Yves Radunz Inhaltsverzeichnis 1 Wiederholung 3 1.1 Allgemeines........................................
Mathematische Werkzeuge für Computergrafik 2016/17. Gleitkommzahlen
 Mathematische Werkzeuge für Computergrafik 2016/17 Gleitkommzahlen 1 Grundlagen 1 Da im Computer nur endliche Ressourcen zur Verfügung stehen, können reelle Zahlen in vielen Fällen nicht exakt dargestellt
Mathematische Werkzeuge für Computergrafik 2016/17 Gleitkommzahlen 1 Grundlagen 1 Da im Computer nur endliche Ressourcen zur Verfügung stehen, können reelle Zahlen in vielen Fällen nicht exakt dargestellt
Endliche Automaten. Endliche Automaten J. Blömer 1/23
 Endliche Automaten Endliche Automaten sind ein Kalkül zur Spezifikation von realen oder abstrakten Maschinen regieren auf äußere Ereignisse (=Eingaben) ändern ihren inneren Zustand produzieren gegebenenfalls
Endliche Automaten Endliche Automaten sind ein Kalkül zur Spezifikation von realen oder abstrakten Maschinen regieren auf äußere Ereignisse (=Eingaben) ändern ihren inneren Zustand produzieren gegebenenfalls
Kapitel VIII - Tests zum Niveau α
 Institut für Volkswirtschaftslehre (ECON) Lehrstuhl für Ökonometrie und Statistik Kapitel VIII - Tests zum Niveau α Induktive Statistik Prof. Dr. W.-D. Heller Hartwig Senska Carlo Siebenschuh Testsituationen
Institut für Volkswirtschaftslehre (ECON) Lehrstuhl für Ökonometrie und Statistik Kapitel VIII - Tests zum Niveau α Induktive Statistik Prof. Dr. W.-D. Heller Hartwig Senska Carlo Siebenschuh Testsituationen
c) {abcde, abcfg, bcade, bcafg} d) {ade, afg, bcde, bcfg} c) {abcabc} d) {abcbc, abc, a} c) {aa, ab, ba, bb} d) {{aa}, {ab}, {ba}, {bb}}
 {abcde, abcfg, bcade, bcafg} d) {ade, afg, bcde, bcfg} c) {abcabc} d) {abcbc, abc, a} c) {aa, ab, ba, bb} d) {{aa}, {ab}, {ba}, {bb}}") 2 Endliche Automaten Fragen 1. Was ergibt sich bei {a, bc} {de, fg}? a) {abc, defg} b) {abcde, abcfg} c) {abcde, abcfg, bcade, bcafg} d) {ade, afg, bcde, bcfg} 2. Was ergibt sich bei {abc, a} {bc, λ}?
2 Endliche Automaten Fragen 1. Was ergibt sich bei {a, bc} {de, fg}? a) {abc, defg} b) {abcde, abcfg} c) {abcde, abcfg, bcade, bcafg} d) {ade, afg, bcde, bcfg} 2. Was ergibt sich bei {abc, a} {bc, λ}?
Diskrete dynamische Systeme in der Populationsgenetik Hofbauer J., und Sigmund K.: Evolutionary Games and Population Dynamics, Cambridge
 Diskrete dynamische Systeme in der Populationsgenetik Hofbauer J., und Sigmund K.: Evolutionary Games and Population Dynamics, Cambridge Dominik Urig Saarbrücken, den 10.01.2012 Inhaltsangabe 1 Biologische
Diskrete dynamische Systeme in der Populationsgenetik Hofbauer J., und Sigmund K.: Evolutionary Games and Population Dynamics, Cambridge Dominik Urig Saarbrücken, den 10.01.2012 Inhaltsangabe 1 Biologische
Theoretische Grundlagen der Informatik
 Theoretische Grundlagen der Informatik Vorlesung am 20. November 2014 INSTITUT FÜR THEORETISCHE 0 KIT 20.11.2014 Universität des Dorothea Landes Baden-Württemberg Wagner - Theoretische und Grundlagen der
Theoretische Grundlagen der Informatik Vorlesung am 20. November 2014 INSTITUT FÜR THEORETISCHE 0 KIT 20.11.2014 Universität des Dorothea Landes Baden-Württemberg Wagner - Theoretische und Grundlagen der
Dynamik von Genen in Populationen
 Dynamik von Genen in Populationen Thomas Spießer 01.08.2007 Zusammenfassung Evolution ist die Veränderung der vererbbaren Merkmale einer Population von Lebewesen von Generation zu Generation. 1 Das Studium
Dynamik von Genen in Populationen Thomas Spießer 01.08.2007 Zusammenfassung Evolution ist die Veränderung der vererbbaren Merkmale einer Population von Lebewesen von Generation zu Generation. 1 Das Studium
GP-Music: An Interactive Genetic Programming System for Music Generation with Automated Fitness
 GP-Music: An Interactive Genetic Programming System for Music Generation with Automated Fitness Raters Brad Johanson, Riccardo Poli Seminarvortrag von Thomas Arnold G ˇ ˇ ˇ ˇ WS 2012/13 TU Darmstadt Seminar
GP-Music: An Interactive Genetic Programming System for Music Generation with Automated Fitness Raters Brad Johanson, Riccardo Poli Seminarvortrag von Thomas Arnold G ˇ ˇ ˇ ˇ WS 2012/13 TU Darmstadt Seminar
5. Spezielle stetige Verteilungen
 5. Spezielle stetige Verteilungen 5.1 Stetige Gleichverteilung Eine Zufallsvariable X folgt einer stetigen Gleichverteilung mit den Parametern a und b, wenn für die Dichtefunktion von X gilt: f x = 1 für
5. Spezielle stetige Verteilungen 5.1 Stetige Gleichverteilung Eine Zufallsvariable X folgt einer stetigen Gleichverteilung mit den Parametern a und b, wenn für die Dichtefunktion von X gilt: f x = 1 für
Klassische Informationstheorie: Berechenbarkeit und Komplexität
 Klassische Informationstheorie: Berechenbarkeit und Komplexität Christian Slupina 1. Institut für Theoretische Physik Datum: 12.Juli 2011 Inhalt Gedankenexperiment: Die Turingmaschine Standard-Turingmaschinen
Klassische Informationstheorie: Berechenbarkeit und Komplexität Christian Slupina 1. Institut für Theoretische Physik Datum: 12.Juli 2011 Inhalt Gedankenexperiment: Die Turingmaschine Standard-Turingmaschinen
3 Bedingte Wahrscheinlichkeit, Unabhängigkeit
 3 Bedingte Wahrscheinlichkeit, Unabhängigkeit Bisher : (Ω, A, P) zur Beschreibung eines Zufallsexperiments Jetzt : Zusatzinformation über den Ausgang des Experiments, etwa (das Ereignis) B ist eingetreten.
3 Bedingte Wahrscheinlichkeit, Unabhängigkeit Bisher : (Ω, A, P) zur Beschreibung eines Zufallsexperiments Jetzt : Zusatzinformation über den Ausgang des Experiments, etwa (das Ereignis) B ist eingetreten.
5 BINÄRE ENTSCHEIDUNGS- DIAGRAMME (BDDS)
") 5 BINÄRE ENTSCHEIDUNGS- DIAGRAMME (BDDS) Sommersemester 2009 Dr. Carsten Sinz, Universität Karlsruhe Datenstruktur BDD 2 1986 von R. Bryant vorgeschlagen zur Darstellung von aussagenlogischen Formeln (genauer:
5 BINÄRE ENTSCHEIDUNGS- DIAGRAMME (BDDS) Sommersemester 2009 Dr. Carsten Sinz, Universität Karlsruhe Datenstruktur BDD 2 1986 von R. Bryant vorgeschlagen zur Darstellung von aussagenlogischen Formeln (genauer:
Zentralübung zur Vorlesung Diskrete Strukturen (Prof. Esparza)
") WS 2013/14 Zentralübung zur Vorlesung Diskrete Strukturen (Prof. Esparza) Dr. Werner Meixner Fakultät für Informatik TU München http://www14.in.tum.de/lehre/2013ws/ds/uebung/ 30. Oktober 2013 ZÜ DS ZÜ
WS 2013/14 Zentralübung zur Vorlesung Diskrete Strukturen (Prof. Esparza) Dr. Werner Meixner Fakultät für Informatik TU München http://www14.in.tum.de/lehre/2013ws/ds/uebung/ 30. Oktober 2013 ZÜ DS ZÜ
Universität Potsdam Institut für Informatik Lehrstuhl Maschinelles Lernen. Clusteranalyse. Tobias Scheffer Thomas Vanck
 Universität Potsdam Institut für Informatik Lehrstuhl Maschinelles Lernen Clusteranalyse Tobias Scheffer Thomas Vanck Überblick Problemstellung/Motivation Deterministischer Ansatz: K-Means Probabilistischer
Universität Potsdam Institut für Informatik Lehrstuhl Maschinelles Lernen Clusteranalyse Tobias Scheffer Thomas Vanck Überblick Problemstellung/Motivation Deterministischer Ansatz: K-Means Probabilistischer
Artificial Life und Multiagentensysteme
 Vortrag im Rahmen des Seminars: Artificial Life und Multiagentensysteme Prof. Dr. Winfried Kurth Sommersemester 2003 Prognose von Zeitreihen mit GA/GP Mathias Radicke, Informatikstudent, 10. Semester Gliederung
Vortrag im Rahmen des Seminars: Artificial Life und Multiagentensysteme Prof. Dr. Winfried Kurth Sommersemester 2003 Prognose von Zeitreihen mit GA/GP Mathias Radicke, Informatikstudent, 10. Semester Gliederung
1 Grundprinzipien statistischer Schlußweisen
 Grundprinzipien statistischer Schlußweisen - - Grundprinzipien statistischer Schlußweisen Für die Analyse zufallsbehafteter Eingabegrößen und Leistungsparameter in diskreten Systemen durch Computersimulation
Grundprinzipien statistischer Schlußweisen - - Grundprinzipien statistischer Schlußweisen Für die Analyse zufallsbehafteter Eingabegrößen und Leistungsparameter in diskreten Systemen durch Computersimulation
Vorlesung 8b. Bedingte Erwartung, bedingte Varianz, bedingte Verteilung, bedingte Wahrscheinlichkeiten
 Vorlesung 8b Bedingte Erwartung, bedingte Varianz, bedingte Verteilung, bedingte Wahrscheinlichkeiten 1 Wie gehabt, denken wir uns ein zufälliges Paar X = (X 1,X 2 ) auf zweistufige Weise zustande gekommen:
Vorlesung 8b Bedingte Erwartung, bedingte Varianz, bedingte Verteilung, bedingte Wahrscheinlichkeiten 1 Wie gehabt, denken wir uns ein zufälliges Paar X = (X 1,X 2 ) auf zweistufige Weise zustande gekommen:
Algorithmen und Datenstrukturen 2
 Algorithmen und Datenstrukturen 2 Sommersemester 2007 11. Vorlesung Peter F. Stadler Universität Leipzig Institut für Informatik [email protected] Das Rucksack-Problem Ein Dieb, der einen Safe
Algorithmen und Datenstrukturen 2 Sommersemester 2007 11. Vorlesung Peter F. Stadler Universität Leipzig Institut für Informatik [email protected] Das Rucksack-Problem Ein Dieb, der einen Safe
5.2 Endliche Automaten
 114 5.2 Endliche Automaten Endliche Automaten sind Turingmaschinen, die nur endlichen Speicher besitzen. Wie wir bereits im Zusammenhang mit Turingmaschinen gesehen haben, kann endlicher Speicher durch
114 5.2 Endliche Automaten Endliche Automaten sind Turingmaschinen, die nur endlichen Speicher besitzen. Wie wir bereits im Zusammenhang mit Turingmaschinen gesehen haben, kann endlicher Speicher durch
Wichtige Definitionen und Aussagen
 Wichtige Definitionen und Aussagen Zufallsexperiment, Ergebnis, Ereignis: Unter einem Zufallsexperiment verstehen wir einen Vorgang, dessen Ausgänge sich nicht vorhersagen lassen Die möglichen Ausgänge
Wichtige Definitionen und Aussagen Zufallsexperiment, Ergebnis, Ereignis: Unter einem Zufallsexperiment verstehen wir einen Vorgang, dessen Ausgänge sich nicht vorhersagen lassen Die möglichen Ausgänge
1. Grundlegende Konzepte der Informatik
 1. Grundlegende Konzepte der Informatik Inhalt Algorithmen Darstellung von Algorithmen mit Programmablaufplänen Beispiele für Algorithmen Aussagenlogik Zahlensysteme Kodierung Peter Sobe 1 Aussagenlogik
1. Grundlegende Konzepte der Informatik Inhalt Algorithmen Darstellung von Algorithmen mit Programmablaufplänen Beispiele für Algorithmen Aussagenlogik Zahlensysteme Kodierung Peter Sobe 1 Aussagenlogik
4. Eine Einführung in Konzept und Arbeitsweise genetischer Algorithmen
 4. Eine Einführung in Konzept und Arbeitsweise genetischer Algorithmen 4.1 Evolution und Genetik Lernprozeß Evolution Die Natur hat es geschafft, aus Milliarden denkbarer Eiweißmoleküle gerade diejenigen
4. Eine Einführung in Konzept und Arbeitsweise genetischer Algorithmen 4.1 Evolution und Genetik Lernprozeß Evolution Die Natur hat es geschafft, aus Milliarden denkbarer Eiweißmoleküle gerade diejenigen
Inhaltsangabe 3.1 Zahlensysteme und Darstellung natürlicher Zahlen Darstellung ganzer Zahlen
 3 Zahlendarstellung - Zahlensysteme - b-adische Darstellung natürlicher Zahlen - Komplementbildung - Darstellung ganzer und reeller Zahlen Inhaltsangabe 3.1 Zahlensysteme und Darstellung natürlicher Zahlen......
3 Zahlendarstellung - Zahlensysteme - b-adische Darstellung natürlicher Zahlen - Komplementbildung - Darstellung ganzer und reeller Zahlen Inhaltsangabe 3.1 Zahlensysteme und Darstellung natürlicher Zahlen......
Mathematik IT 2 (Lineare Algebra)
") Lehrstuhl Mathematik, insbesondere Numerische und Angewandte Mathematik Prof Dr L Cromme Mathematik IT (Lineare Algebra für die Studiengänge Informatik, IMT und ebusiness im Sommersemester 3 Lineare Gleichungssysteme
Lehrstuhl Mathematik, insbesondere Numerische und Angewandte Mathematik Prof Dr L Cromme Mathematik IT (Lineare Algebra für die Studiengänge Informatik, IMT und ebusiness im Sommersemester 3 Lineare Gleichungssysteme
2.2.4 Logische Äquivalenz
 2.2.4 Logische Äquivalenz (I) Penélope raucht nicht und sie trinkt nicht. (II) Es ist nicht der Fall, dass Penélope raucht oder trinkt. Offenbar behaupten beide Aussagen denselben Sachverhalt, sie unterscheiden
2.2.4 Logische Äquivalenz (I) Penélope raucht nicht und sie trinkt nicht. (II) Es ist nicht der Fall, dass Penélope raucht oder trinkt. Offenbar behaupten beide Aussagen denselben Sachverhalt, sie unterscheiden
Das diesem Dokument zugrundeliegende Vorhaben wurde mit Mitteln des Bundesministeriums für Bildung und Forschung unter dem Förderkennzeichen
 Das diesem Dokument zugrundeliegende Vorhaben wurde mit Mitteln des Bundesministeriums für Bildung und Forschung unter dem Förderkennzeichen 16OH21005 gefördert. Die Verantwortung für den Inhalt dieser
Das diesem Dokument zugrundeliegende Vorhaben wurde mit Mitteln des Bundesministeriums für Bildung und Forschung unter dem Förderkennzeichen 16OH21005 gefördert. Die Verantwortung für den Inhalt dieser
Einführung in die Induktive Statistik: Testen von Hypothesen
 Einführung in die Induktive Statistik: Testen von Hypothesen Jan Gertheiss LMU München Sommersemester 2011 Vielen Dank an Christian Heumann für das Überlassen von TEX-Code! Testen: Einführung und Konzepte
Einführung in die Induktive Statistik: Testen von Hypothesen Jan Gertheiss LMU München Sommersemester 2011 Vielen Dank an Christian Heumann für das Überlassen von TEX-Code! Testen: Einführung und Konzepte
15.5 Stetige Zufallsvariablen
 5.5 Stetige Zufallsvariablen Es gibt auch Zufallsvariable, bei denen jedes Elementarereignis die Wahrscheinlich keit hat. Beispiel: Lebensdauer eines radioaktiven Atoms Die Lebensdauer eines radioaktiven
5.5 Stetige Zufallsvariablen Es gibt auch Zufallsvariable, bei denen jedes Elementarereignis die Wahrscheinlich keit hat. Beispiel: Lebensdauer eines radioaktiven Atoms Die Lebensdauer eines radioaktiven
12. Woche: Verifizierer, nicht-deterministische Turingmaschine, Klasse NP
 12 Woche: Verifizierer, nicht-deterministische Turingmaschine, Klasse NP 12 Woche: Verifizierer, nicht-deterministische Turingmaschine, NP 254/ 333 Polynomielle Verifizierer und NP Ḋefinition Polynomieller
12 Woche: Verifizierer, nicht-deterministische Turingmaschine, Klasse NP 12 Woche: Verifizierer, nicht-deterministische Turingmaschine, NP 254/ 333 Polynomielle Verifizierer und NP Ḋefinition Polynomieller
Lösungen zu Übungsblatt 9 Höhere Mathematik2/Stochastik 2 Master KI/PI
 Lösungen zu Übungsblatt 9 Höhere Mathematik/Stochastik Anpassung von Verteilungen Zu Aufgabe ) a) Zeichnen des Histogranmmes: Um das Histogramm zu zeichnen, benötigen wir die Höhe der Balken. Die Höhe
Lösungen zu Übungsblatt 9 Höhere Mathematik/Stochastik Anpassung von Verteilungen Zu Aufgabe ) a) Zeichnen des Histogranmmes: Um das Histogramm zu zeichnen, benötigen wir die Höhe der Balken. Die Höhe
Lineares Gleichungssystem - Vertiefung
 Lineares Gleichungssystem - Vertiefung Die Lösung Linearer Gleichungssysteme ist das "Gauß'sche Eliminationsverfahren" gut geeignet - schon erklärt unter Z02. Alternativ kann mit einem Matrixformalismus
Lineares Gleichungssystem - Vertiefung Die Lösung Linearer Gleichungssysteme ist das "Gauß'sche Eliminationsverfahren" gut geeignet - schon erklärt unter Z02. Alternativ kann mit einem Matrixformalismus
Maschinelles Lernen: Symbolische Ansätze
 Maschinelles Lernen: Symbolische Ansätze Wintersemester 2008/2009 Musterlösung für das 5. Übungsblatt Aufgabe 1: Covering-Algorithmus und Coverage-Space Visualisieren Sie den Ablauf des Covering-Algorithmus
Maschinelles Lernen: Symbolische Ansätze Wintersemester 2008/2009 Musterlösung für das 5. Übungsblatt Aufgabe 1: Covering-Algorithmus und Coverage-Space Visualisieren Sie den Ablauf des Covering-Algorithmus
Andreas Scherer. Neuronale Netze. Grundlagen und Anwendungen. vieweg
 Andreas Scherer Neuronale Netze Grundlagen und Anwendungen vieweg Inhaltsverzeichnis Vorwort 1 1 Einführung 3 1.1 Was ist ein neuronales Netz? 3 1.2 Eigenschaften neuronaler Netze 5 1.2.1 Allgemeine Merkmale
Andreas Scherer Neuronale Netze Grundlagen und Anwendungen vieweg Inhaltsverzeichnis Vorwort 1 1 Einführung 3 1.1 Was ist ein neuronales Netz? 3 1.2 Eigenschaften neuronaler Netze 5 1.2.1 Allgemeine Merkmale
Grundbegriffe der Wahrscheinlichkeitsrechnung
 Algorithmen und Datenstrukturen 349 A Grundbegriffe der Wahrscheinlichkeitsrechnung Für Entwurf und Analyse randomisierter Algorithmen sind Hilfsmittel aus der Wahrscheinlichkeitsrechnung erforderlich.
Algorithmen und Datenstrukturen 349 A Grundbegriffe der Wahrscheinlichkeitsrechnung Für Entwurf und Analyse randomisierter Algorithmen sind Hilfsmittel aus der Wahrscheinlichkeitsrechnung erforderlich.
Folgen und Reihen Folgen
 Folgen und Reihen 30307 Folgen Einstieg: Wir beginnen mit einigen Beispielen für reelle Folgen: (i),, 4, 8, 6, (ii) 4,, 6, 3, 7, (iii) 0,,,, 3,, (iv), 3, 7,,, Aufgabe : Setzt die Zahlenfolgen logisch fort
Folgen und Reihen 30307 Folgen Einstieg: Wir beginnen mit einigen Beispielen für reelle Folgen: (i),, 4, 8, 6, (ii) 4,, 6, 3, 7, (iii) 0,,,, 3,, (iv), 3, 7,,, Aufgabe : Setzt die Zahlenfolgen logisch fort
Grundbegriffe der Informatik
 Grundbegriffe der Informatik Einheit 14: Endliche Automaten Thomas Worsch Universität Karlsruhe, Fakultät für Informatik Wintersemester 2008/2009 1/38 Überblick Erstes Beispiel: ein Getränkeautomat Mealy-Automaten
Grundbegriffe der Informatik Einheit 14: Endliche Automaten Thomas Worsch Universität Karlsruhe, Fakultät für Informatik Wintersemester 2008/2009 1/38 Überblick Erstes Beispiel: ein Getränkeautomat Mealy-Automaten
Algorithms for Regression and Classification
 Fakultät für Informatik Effiziente Algorithmen und Komplexitätstheorie Algorithms for Regression and Classification Robust Regression and Genetic Association Studies Robin Nunkesser Fakultät für Informatik
Fakultät für Informatik Effiziente Algorithmen und Komplexitätstheorie Algorithms for Regression and Classification Robust Regression and Genetic Association Studies Robin Nunkesser Fakultät für Informatik
Algorithmen und Datenstrukturen 2
 Algorithmen und Datenstrukturen 2 Sommersemester 2009 11. Vorlesung Uwe Quasthoff Universität Leipzig Institut für Informatik [email protected] Das Rucksack-Problem Ein Dieb, der einen
Algorithmen und Datenstrukturen 2 Sommersemester 2009 11. Vorlesung Uwe Quasthoff Universität Leipzig Institut für Informatik [email protected] Das Rucksack-Problem Ein Dieb, der einen
5. Clusteranalyse. Lernziele: Grundlegende Algorithmen der Clusteranalyse kennen, ihre Eigenschaften
 5. Clusteranalyse Lernziele: Grundlegende Algorithmen der Clusteranalyse kennen, ihre Eigenschaften benennen und anwenden können, einen Test auf das Vorhandensein einer Clusterstruktur kennen, verschiedene
5. Clusteranalyse Lernziele: Grundlegende Algorithmen der Clusteranalyse kennen, ihre Eigenschaften benennen und anwenden können, einen Test auf das Vorhandensein einer Clusterstruktur kennen, verschiedene
Biostatistik, Winter 2011/12
 Biostatistik, Winter 2011/12 Wahrscheinlichkeitstheorie:, Kenngrößen Prof. Dr. Achim Klenke http://www.aklenke.de 7. Vorlesung: 09.12.2011 1/58 Inhalt 1 2 Kenngrößen von Lagemaße 2/58 mit Dichte Normalverteilung
Biostatistik, Winter 2011/12 Wahrscheinlichkeitstheorie:, Kenngrößen Prof. Dr. Achim Klenke http://www.aklenke.de 7. Vorlesung: 09.12.2011 1/58 Inhalt 1 2 Kenngrößen von Lagemaße 2/58 mit Dichte Normalverteilung
Automaten und Formale Sprachen ε-automaten und Minimierung
 Automaten und Formale Sprachen ε-automaten und Minimierung Ralf Möller Hamburg Univ. of Technology Literatur Gottfried Vossen, Kurt-Ulrich Witt: Grundkurs Theoretische Informatik, Vieweg Verlag 2 Danksagung
Automaten und Formale Sprachen ε-automaten und Minimierung Ralf Möller Hamburg Univ. of Technology Literatur Gottfried Vossen, Kurt-Ulrich Witt: Grundkurs Theoretische Informatik, Vieweg Verlag 2 Danksagung
Endliche Automaten. Im Hauptseminar Neuronale Netze LMU München, WS 2016/17
 Endliche Automaten Im Hauptseminar Neuronale Netze LMU München, WS 2016/17 RS- Flipflop RS-Flipflop Ausgangszustand 0 1 0 1 0 1 Set Reset neuer Zustand 0 0 0 0 0 1 1 0 1 1 0 1 0 1 0 0 1 0 Was ist ein endlicher
Endliche Automaten Im Hauptseminar Neuronale Netze LMU München, WS 2016/17 RS- Flipflop RS-Flipflop Ausgangszustand 0 1 0 1 0 1 Set Reset neuer Zustand 0 0 0 0 0 1 1 0 1 1 0 1 0 1 0 0 1 0 Was ist ein endlicher
2 Darstellung von Zahlen und Zeichen
 2.1 Analoge und digitale Darstellung von Werten 79 2 Darstellung von Zahlen und Zeichen Computer- bzw. Prozessorsysteme führen Transformationen durch, die Eingaben X auf Ausgaben Y abbilden, d.h. Y = f
2.1 Analoge und digitale Darstellung von Werten 79 2 Darstellung von Zahlen und Zeichen Computer- bzw. Prozessorsysteme führen Transformationen durch, die Eingaben X auf Ausgaben Y abbilden, d.h. Y = f
Spiel 1: Spielerische Simulation der Hardy-Weinberg-Regel
 Spiel : Spielerische Simulation der Hardy-Weinberg-Regel Spielbrett, Box Genpool, Taschenrechner Wichtig! Das Spiel wird fünf Runden gespielt!. Ziehen Sie aus dem Genpool ohne Hinschauen insgesamt 54 Individuen.
Spiel : Spielerische Simulation der Hardy-Weinberg-Regel Spielbrett, Box Genpool, Taschenrechner Wichtig! Das Spiel wird fünf Runden gespielt!. Ziehen Sie aus dem Genpool ohne Hinschauen insgesamt 54 Individuen.
FORMALE SYSTEME. 8. Vorlesung: Minimale Automaten. TU Dresden, 6. November Markus Krötzsch Lehrstuhl Wissensbasierte Systeme
 FORMALE SYSTEME 8. Vorlesung: Minimale Automaten Markus Krötzsch Lehrstuhl Wissensbasierte Systeme TU Dresden, 6. November 2017 Rückblick Markus Krötzsch, 6. November 2017 Formale Systeme Folie 2 von 26
FORMALE SYSTEME 8. Vorlesung: Minimale Automaten Markus Krötzsch Lehrstuhl Wissensbasierte Systeme TU Dresden, 6. November 2017 Rückblick Markus Krötzsch, 6. November 2017 Formale Systeme Folie 2 von 26
Genetische Algorithmen
 Projekt für Algorithmische Anwendungen Genetische Algorithmen Von Mike Müller 11037091 Dennis Freese 11038517 Gruppe: B-ROT 1 Inhaltsverzeichnis Allgemeines...3 Geschichtliche Entwicklung der genetischen
Projekt für Algorithmische Anwendungen Genetische Algorithmen Von Mike Müller 11037091 Dennis Freese 11038517 Gruppe: B-ROT 1 Inhaltsverzeichnis Allgemeines...3 Geschichtliche Entwicklung der genetischen
5. Clusteranalyse Vorbemerkungen. 5. Clusteranalyse. Grundlegende Algorithmen der Clusteranalyse kennen, ihre Eigenschaften
 5. Clusteranalyse Vorbemerkungen 5. Clusteranalyse Lernziele: Grundlegende Algorithmen der Clusteranalyse kennen, ihre Eigenschaften benennen und anwenden können, einen Test auf das Vorhandensein einer
5. Clusteranalyse Vorbemerkungen 5. Clusteranalyse Lernziele: Grundlegende Algorithmen der Clusteranalyse kennen, ihre Eigenschaften benennen und anwenden können, einen Test auf das Vorhandensein einer
Messprotokoll: Aufnahme der Quantenzufallszahl
 Messprotokoll: Aufnahme der Quantenzufallszahl Am 19. Juni 2009 wurden für Max Mustermann um 8:35 Uhr mit Hilfe von einzelnen Photonen 993.097 Zufallszahlen generiert. Der Zufallsgenerator steht im Quantenoptiklabor
Messprotokoll: Aufnahme der Quantenzufallszahl Am 19. Juni 2009 wurden für Max Mustermann um 8:35 Uhr mit Hilfe von einzelnen Photonen 993.097 Zufallszahlen generiert. Der Zufallsgenerator steht im Quantenoptiklabor
SBP Mathe Aufbaukurs 1 # 0 by Clifford Wolf. SBP Mathe Aufbaukurs 1
 SBP Mathe Aufbaukurs 1 # 0 by Clifford Wolf SBP Mathe Aufbaukurs 1 # 0 Antwort Diese Lernkarten sind sorgfältig erstellt worden, erheben aber weder Anspruch auf Richtigkeit noch auf Vollständigkeit. Das
SBP Mathe Aufbaukurs 1 # 0 by Clifford Wolf SBP Mathe Aufbaukurs 1 # 0 Antwort Diese Lernkarten sind sorgfältig erstellt worden, erheben aber weder Anspruch auf Richtigkeit noch auf Vollständigkeit. Das
Der genetische Algorithmus
 Joachim Breitner Seminarkurs am Schickhardt-Gymnasium Herrenberg 2002/2003 Halbjahr 12.2 Modellbildung und Simulation am Beispiel der Evolution und dem Programm EvoLab Thema 2: Der genetische Algorithmus
Joachim Breitner Seminarkurs am Schickhardt-Gymnasium Herrenberg 2002/2003 Halbjahr 12.2 Modellbildung und Simulation am Beispiel der Evolution und dem Programm EvoLab Thema 2: Der genetische Algorithmus
Electronic Design Automation (EDA) Technology Mapping
 Technology Mapping") Electronic Design Automation (EDA) Technology Mapping Überblick digitale Synthese Technology Mapping Abbildung durch die Abdeckung eines Baumes Partitionierung des DAG Dekomposition und Abdeckung Beispiel
Electronic Design Automation (EDA) Technology Mapping Überblick digitale Synthese Technology Mapping Abbildung durch die Abdeckung eines Baumes Partitionierung des DAG Dekomposition und Abdeckung Beispiel
Lineare Algebra I (WS 12/13)
") Lineare Algebra I (WS 12/13) Alexander Lytchak Nach einer Vorlage von Bernhard Hanke, Universität Augsburg 15.10.2013 Alexander Lytchak 1 / 14 Organisation Alle wichtigen organisatorischen Information
Lineare Algebra I (WS 12/13) Alexander Lytchak Nach einer Vorlage von Bernhard Hanke, Universität Augsburg 15.10.2013 Alexander Lytchak 1 / 14 Organisation Alle wichtigen organisatorischen Information
Stud.-Nummer: Datenstrukturen & Algorithmen Seite 1
 Stud.-Nummer: Datenstrukturen & Algorithmen Seite 1 Aufgabe 1. / 16 P Instruktionen: 1) In dieser Aufgabe sollen Sie nur die Ergebnisse angeben. Diese können Sie direkt bei den Aufgaben notieren. 2) Sofern
Stud.-Nummer: Datenstrukturen & Algorithmen Seite 1 Aufgabe 1. / 16 P Instruktionen: 1) In dieser Aufgabe sollen Sie nur die Ergebnisse angeben. Diese können Sie direkt bei den Aufgaben notieren. 2) Sofern
Evolutionsstrategien
 Evolutionsstrategien Seminar Evolutionary Algorithms SS 2010 Cornelius Diekmann Lehrstuhl Robotics and Embedded Systems Veranstalter: Dipl.-Inf. Frank Sehnke Fakultät für Informatik Technische Universität
Evolutionsstrategien Seminar Evolutionary Algorithms SS 2010 Cornelius Diekmann Lehrstuhl Robotics and Embedded Systems Veranstalter: Dipl.-Inf. Frank Sehnke Fakultät für Informatik Technische Universität
3. Prozesse mit kontinuierlicher Zeit
 3. Prozesse mit kontinuierlicher Zeit 3.1 Einführung Wir betrachten nun Markov-Ketten (X(t)) t R +. 0 Wie beim Übergang von der geometrischen zur Exponentialverteilung können wir uns auch hier einen Grenzprozess
3. Prozesse mit kontinuierlicher Zeit 3.1 Einführung Wir betrachten nun Markov-Ketten (X(t)) t R +. 0 Wie beim Übergang von der geometrischen zur Exponentialverteilung können wir uns auch hier einen Grenzprozess
5. Numerische Differentiation. und Integration
 5. Numerische Differentiation und Integration 1 Numerische Differentiation Problemstellung: Gegeben ist eine differenzierbare Funktion f : [a,b] R und x (a,b). Gesucht sind Näherungen für die Ableitungen
5. Numerische Differentiation und Integration 1 Numerische Differentiation Problemstellung: Gegeben ist eine differenzierbare Funktion f : [a,b] R und x (a,b). Gesucht sind Näherungen für die Ableitungen
5 Numerische Mathematik
 6 5 Numerische Mathematik Die Numerische Mathematik setzt sich aus mehreren Einzelmodulen zusammen Für alle Studierenden ist das Modul Numerische Mathematik I: Grundlagen verpflichtend In diesem Modul
6 5 Numerische Mathematik Die Numerische Mathematik setzt sich aus mehreren Einzelmodulen zusammen Für alle Studierenden ist das Modul Numerische Mathematik I: Grundlagen verpflichtend In diesem Modul
Grundlagen: Algorithmen und Datenstrukturen
 Technische Universität München Fakultät für Informatik Lehrstuhl für Effiziente Algorithmen Dr. Hanjo Täubig Tobias Lieber Sommersemester 2011 Übungsblatt 1 16. September 2011 Grundlagen: Algorithmen und
Technische Universität München Fakultät für Informatik Lehrstuhl für Effiziente Algorithmen Dr. Hanjo Täubig Tobias Lieber Sommersemester 2011 Übungsblatt 1 16. September 2011 Grundlagen: Algorithmen und