Verbundprojekt. AKIT Autonomie-Kit für seriennahe Arbeitsfahrzeuge zur vernetzten und assistierten Bergung von Gefahrenquellen
|
|
|
- Ingrid Schäfer
- vor 5 Jahren
- Abrufe
Transkript
1 Verbundprojekt AKIT Autonomie-Kit für seriennahe Arbeitsfahrzeuge zur vernetzten und assistierten Bergung von Gefahrenquellen Zivile Sicherheit Innovative Rettungs- und Sicherheitssysteme im Rahmen des Programms Forschung für die zivile Sicherheit der Bundesregierung
2 Übersicht Projektziele Szenario Stand der Technik Lösungsansatz Projektkonsortium Bergungskette Geplante Funktionen Methodik und Vorgehen
3 Ziele Unterstützung von Einsatzkräften während Rettungseinsätzen Schutz vor Gefährdungen Schnelle und sichere Beseitigung von Gefahrenquellen, um Rettungs- und Bergungsmaßnahmen schnell einleiten zu können Szenario: Großschadensereignis mit hohem Gefahrenpotential für Einsatzkräfte Gefährdung für Einsatzkräfte durch Giftige Substanzen Hitze, Strahlung Explosionsgefahr Einsturzgefahr

")
")
4 Szenario Tianjin 2015 Quelle ( Fukushima 2011 Quelle ( Digital Globe) Ludwigshafen 2016 Quelle ( Radosław Drożdżewski)

 Teleoperierbarer")
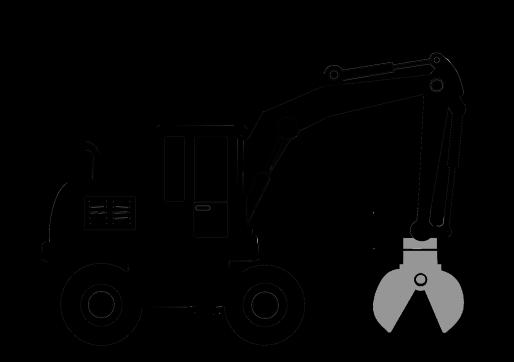
5 Stand der Technik Flugdrohnen zur Erkundung Kleinrobotersysteme zur videobasierten Erkundung Mobile Manipulatoren Teleoperierte Arbeitsmaschinen Mobile Fernhantierungstechnik (KHG) Teleoperierbarer Raupenbagger (KHG)
 Oft mehrere Bediener notwendig AKIT-Ansatz Weltweit stehen geeignete Arbeitsmaschinen zur Verfügung (z. B. Bagger mit div. Wechselwerkzeugen; Traktoren mit div.")
6 Stand der Technik Teleoperierte Arbeitsmaschinen Ausgereifte mechanische Systeme - Ableitung aus Serientechnik Geringe Verfügbarkeit - Speziallösungen Langsamer Transport (Großgeräte) Langsame Arbeitsgeschwindigkeit (Teleoperation) Oft mehrere Bediener notwendig AKIT-Ansatz Weltweit stehen geeignete Arbeitsmaschinen zur Verfügung (z. B. Bagger mit div. Wechselwerkzeugen; Traktoren mit div. Anbaugeräten) Entwicklung einer Zurüstlösung für Fahrzeuge Teleoperierbarer Raupenbagger (KHG)
7 Ansatz AKIT Funktionen Teleoperierbarkeit Erweiterung um autonome und teilautonome Navigations- und Manipulationsfunktionen Einfacher Transport und schnelle Zurüstbarkeit der benötigten Komponenten des AKIT an Serienfahrzeuge Komponenten Sensorik für Navigation und zur Umgebungserfassung und Kartierung Datenverarbeitung Fahrzeugsteuerung Autarke Kommunikation mit einem Leitstand
8 Ansatz AKIT Unterstützende Entwicklungen im Bereich Arbeitsmaschinen Schnittstellen zu Anbauten und Werkzeugen sind bereits zum Teil standardisiert Mechanische Schnittstellen: Zapfwelle, Hydraulik, Adaptersysteme Elektronische Schnittstellen: ISO-Bus (ISO 11783) Einsatz von elektronischen Steuergeräten in Arbeitsmaschinen Ansteuerung von Fahrzeugen komplett über Bus-Systeme möglich z. B. genutzt beim Precision Farming Keine Fahrroboter notwendig

 Funk- und Sensortechnik Kompetenz in der Fahrzeugautomatisierung SGE")

9 Projektkonsortium Götting KG Fahrerlose Transportsysteme auf Basis von umgerüsteten Seriennutzfahrzeugen (LKW, Radlader, Industrieschlepper, Gabelstapler u. ä.) Funk- und Sensortechnik Kompetenz in der Fahrzeugautomatisierung SGE GmbH Spezialisiertes Unternehmen im Sondermaschinenbau Module für Fahrzeugeinsatz (Werkzeugwechsel-, Dekontaminations-, Plasmaschneidemodule u. ä.) Entwicklung und Umsetzung von Sondermodulen für AKIT

10 Projektkonsortium Kerntechnische Hilfsdienst GmbH Innerbetrieblicher Notfallschutz kerntechnischer Anlagen Bereitstellung von geeignetem Material für die Erkennung und Beseitigung von Störfallfolgen in kerntechnischen Anlagen Projektierung und Betrieb unterschiedlichster ferngelenkter Manipulatorfahrzeuge Anwendererfahrung im Projektkontext Einbringen von verschiedenen Geräten in das Projekt (Kommunikationsbojen, mobiler Leitstand, Manipulationswerkzeuge) Fernmanipulator (KHG)


11 Projektkonsortium Fraunhofer-Gesellschaft IPA Stuttgart IOSB Karlsruhe / Ilmenau Forschungspartner des Konsortiums Automatisierungstechnik Autonome Manipulation Autonomes Fahren Quelle: btr
12 Assoziierte Partner CLAAS selbstfahrende Erntemaschinen GmbH Entwurf, Herstellung und Vertrieb von Landwirtschaftlichen Nutzfahrzeugen Umfangreiche Erfahrungen im Bereich Arbeitsmaschinen Beratung zu Umrüstmöglichkeiten für Teleskoplader, Traktoren und Anhängersysteme Liebherr GmbH Entwicklung und Herstellung von schweren Baumaschinen und weiteren Großgeräten Beratung zu Umrüstungen schwerer Baumaschinen Feuerwehr und Katastrophenschutz Mannheim Hr. Mario König (außerdem Mitglied des THW) Fachberatung zu Einsatzerfordernissen







13 Umzusetzende Bergungskette Hot-Zone Warm-Zone Cold-Zone UAV SUH BEF LTS MTS+KTR KKN

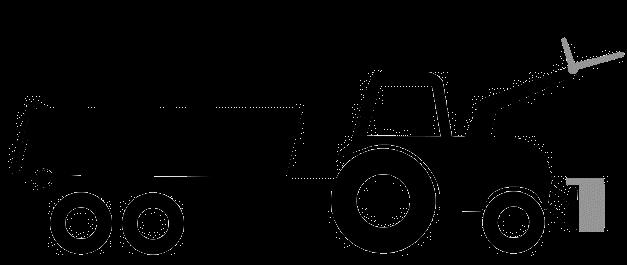
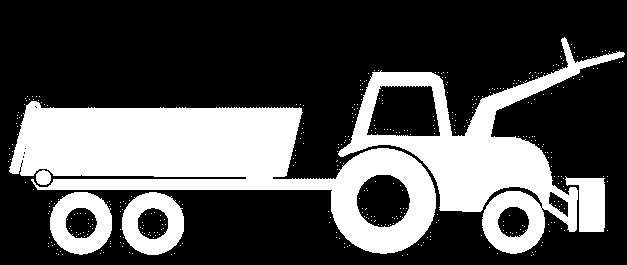
14 Bestandteile der Bergungskette BEF: Bergefahrzeug Umgerüstete Arbeitsmaschine mit AKIT Beräumung am Einsatzort Nutzung verschiedener Werkzeuge mit automatischem Werkzeugwechsel SUH: Support-Shuttle Teilautonomer Zubringer von Werkzeugen zum Bergefahrzeug Kooperative Funktionen zusammen mit Bergefahrzeug Zu- und Abtransport von Material
")
 Mobiles Trägersystem")
15 Bestandteile der Bergungskette KKN: Kommunikationsknoten Aufbau eines autarken Kommunikationsnetzes Absetzen von Komponententräger (KTR) Hilfsmodule Mobiler Leitstand (LTS) Kommunikationsknoten (KHG) UAV zur luftgestützten Aufklärung Komponententräger (KTR) Mobiles Trägersystem (MTS) Leitstand (KHG)

16 Funktionen des AKIT Zurüstbarkeit für Support-Shuttle und Bergefahrzeug Sensoren und DV-Hardware Automatisierte Fahrfunktionen in unstrukturierter Umgebung Wegpunktanfahrt Teach-In / Coming Home / Feinpositionierung für Manipulationsaufgaben Pfadplanung und -regelung, Hindernisvermeidung Kooperative Funktionen zwischen Fahrzeugen Autonome Manipulationsfunktionen 3D-Erfassung des Arbeitsraumes Greifpunktbestimmung Automatisierter Werkzeugwechsel Hilfsfunktionen 3D-Umgebungserfassung und Kartierung Kommunikation
17 Teilaufgabe automatisierte Fahrfunktionen 3D- Umfelderfassung Lokalisierung Pfadplanung Pfadregelung Nutzfunktionen (Exploration, Wegpunktanfahrt, Teach-In, Coming-Home, Feinpositionierung, Kooperative Bergungsfunktionen)


18 Methodik und Vorgehen Quelle: btr a-priori Testträger Integration Sensorik und DV-HW Middleware-Integration und Algorithmenentwicklung Erprobung Upscaling auf Demonstratoren Quelle: An-d




19 Methodik und Vorgehen Simulation der Kinematik Entwicklung der Algorithmen und Ablaufsteuerung Test auf realen Plattformen Test im realen Umfeld Transfer auf Zielsysteme Quelle: btr
20 Projekt AKIT Projektstart: Oktober 2016 Dauer: 36 Monate Kosten: ca. 3 Mio. Euro Fördergeber: BMBF Projektträger: VDI Technologiezentrum
21 Vielen Dank für Ihre Aufmerksamkeit!
Verbundprojekt. AKIT Autonomie-Kit für seriennahe Arbeitsfahrzeuge zur vernetzten und assistierten Bergung von Gefahrenquellen
 Verbundprojekt AKIT Autonomie-Kit für seriennahe Arbeitsfahrzeuge zur vernetzten und assistierten Bergung von Gefahrenquellen Zivile Sicherheit Innovative Rettungs- und Sicherheitssysteme im Rahmen des
Verbundprojekt AKIT Autonomie-Kit für seriennahe Arbeitsfahrzeuge zur vernetzten und assistierten Bergung von Gefahrenquellen Zivile Sicherheit Innovative Rettungs- und Sicherheitssysteme im Rahmen des
Sicherheit im ÖPNV bei Großveranstaltungen
 Sicherheit im ÖPNV bei Großveranstaltungen Dr. Norbert Reinkober Nahverkehr Rheinland GmbH 6. Europäischer Bevölkerungs- und Katastrophenschutzkongress 9. September 2010, Bad Godesberg Der Projektrahmen
Sicherheit im ÖPNV bei Großveranstaltungen Dr. Norbert Reinkober Nahverkehr Rheinland GmbH 6. Europäischer Bevölkerungs- und Katastrophenschutzkongress 9. September 2010, Bad Godesberg Der Projektrahmen
Digitaler Knoten 4.0
 Digitaler Knoten 4.0 Gestaltung und Regelung städtischer Knotenpunkte für sicheres und effizientes, automatisiertes Fahren im gemischten Verkehr 01.12.2017 Fachtagung Automatisiertes und vernetztes Fahren
Digitaler Knoten 4.0 Gestaltung und Regelung städtischer Knotenpunkte für sicheres und effizientes, automatisiertes Fahren im gemischten Verkehr 01.12.2017 Fachtagung Automatisiertes und vernetztes Fahren
Verbundprojekt. Automated Cars and Intelligent Traffic in the City. Automatisierte Fahrzeuge und Intelligenter Verkehr in der Stadt
 Verbundprojekt Automated Cars and Intelligent Traffic in the City Automatisierte Fahrzeuge und Intelligenter Verkehr in der Stadt Dr. Ulrich Kreßel, Daimler AG Fachtagung Automatisiertes und vernetztes
Verbundprojekt Automated Cars and Intelligent Traffic in the City Automatisierte Fahrzeuge und Intelligenter Verkehr in der Stadt Dr. Ulrich Kreßel, Daimler AG Fachtagung Automatisiertes und vernetztes
Sicher Fahren und Transportieren
 Sicher Fahren und Transportieren Dr. Frank Oppenheimer OFFIS - Institut für Informatik Oldenburg Kongress über betrieblichen Arbeits- und Gesundheitsschutz, Oldenburg, 2.9.2010 2 Logistik und Automation
Sicher Fahren und Transportieren Dr. Frank Oppenheimer OFFIS - Institut für Informatik Oldenburg Kongress über betrieblichen Arbeits- und Gesundheitsschutz, Oldenburg, 2.9.2010 2 Logistik und Automation
Robotersysteme für menschenfeindliche Umgebungen: Start des Kompetenzzentrums ROBDEKON
 Robotersysteme für menschenfeindliche Umgebungen: Start des Kompetenzzentrums ROBDEKON Bundesministerium für Bildung und Forschung fördert mit zwölf Millionen Euro Monika Landgraf Pressesprecherin, Leiterin
Robotersysteme für menschenfeindliche Umgebungen: Start des Kompetenzzentrums ROBDEKON Bundesministerium für Bildung und Forschung fördert mit zwölf Millionen Euro Monika Landgraf Pressesprecherin, Leiterin
Autonomes Fahren. Landwirtschaftliche Innovation. Christian Huber Vice President Global Case IH / Steyr Traktoren CNH Industrial
 Autonomes Fahren Landwirtschaftliche Innovation Christian Huber Vice President Global Case IH / Steyr Traktoren CNH Industrial CNH Industrial Autonomous Fahrzeug Programm Landwirtschaftliche Innovation
Autonomes Fahren Landwirtschaftliche Innovation Christian Huber Vice President Global Case IH / Steyr Traktoren CNH Industrial CNH Industrial Autonomous Fahrzeug Programm Landwirtschaftliche Innovation
Software für Versorger und Industrie. Das Projekt BaSys 4.0. Karl M. Tröger Business Development Manager
 Software für Versorger und Industrie Das Projekt BaSys 4.0 Karl M. Tröger Business Development Manager WWW.BASYS40.DE 2 BaSys Scope& Projekt Virtuelle Middleware Entwicklung eines Basissystems für Produktionsanlagen,
Software für Versorger und Industrie Das Projekt BaSys 4.0 Karl M. Tröger Business Development Manager WWW.BASYS40.DE 2 BaSys Scope& Projekt Virtuelle Middleware Entwicklung eines Basissystems für Produktionsanlagen,
servicerobotik Autonome Mobile Serviceroboter
 Monty (http://www.anybots.com/) Investition in Ihre Zukunft gefördert durch die Europäische Union Europäischer Fonds für regionale Entwicklung und das Land Baden-Württemberg Hochschule Ulm University of
Monty (http://www.anybots.com/) Investition in Ihre Zukunft gefördert durch die Europäische Union Europäischer Fonds für regionale Entwicklung und das Land Baden-Württemberg Hochschule Ulm University of
Begrüßung Forschungsaktivitäten des BMBF-Referats 525 Kommunikationssysteme, IT-Sicherheit. Holger Bodag. Bremen, 20. Juni
 Begrüßung Forschungsaktivitäten des BMBF-Referats 525 Kommunikationssysteme, IT-Sicherheit Holger Bodag Bremen, 20. Juni 2016 www.bmbf.de Referat Kommunikationssysteme, IT-Sicherheit Forschungsrahmenprogramm
Begrüßung Forschungsaktivitäten des BMBF-Referats 525 Kommunikationssysteme, IT-Sicherheit Holger Bodag Bremen, 20. Juni 2016 www.bmbf.de Referat Kommunikationssysteme, IT-Sicherheit Forschungsrahmenprogramm
Die Teleoperation als Ansatz zur fahrerlosen Fahrzeugführung
 Die Teleoperation als Ansatz zur fahrerlosen Fahrzeugführung Sebastian Gnatzig, Erick Haas, Prof. Dr. Markus Lienkamp Gliederung Einleitung Stand der Technik Vorgehen Durchführung Diskussion Zusammenfassung
Die Teleoperation als Ansatz zur fahrerlosen Fahrzeugführung Sebastian Gnatzig, Erick Haas, Prof. Dr. Markus Lienkamp Gliederung Einleitung Stand der Technik Vorgehen Durchführung Diskussion Zusammenfassung
Das E-Auto und intelligente Mobilitätskonzepte für übermorgen
 Das E-Auto und intelligente Mobilitätskonzepte für übermorgen Sicht der Forschung aus dem Bereich Künstliche Intelligenz und Robotik 31.10.2013, Baunatal Jens Mey DFKI Bremen & Universität Bremen Robotics
Das E-Auto und intelligente Mobilitätskonzepte für übermorgen Sicht der Forschung aus dem Bereich Künstliche Intelligenz und Robotik 31.10.2013, Baunatal Jens Mey DFKI Bremen & Universität Bremen Robotics
SensProCloth Innovationsplattform, Bonn 24./
 Innovationsplattform, Bonn 24./ 25. 7. 2009 Systemintegrierte sensorische Schutzbekleidung für Feuerwehr und Katastrophenschutz - Erfassung und Weitermeldung von physiologischen Zustandsparametern und
Innovationsplattform, Bonn 24./ 25. 7. 2009 Systemintegrierte sensorische Schutzbekleidung für Feuerwehr und Katastrophenschutz - Erfassung und Weitermeldung von physiologischen Zustandsparametern und
Adaptive Lösungsplattform zur Aktiven technischen Unterstützung beim Retten von Menschenleben
 Schutz und Rettung von Menschen Adaptive Lösungsplattform zur Aktiven technischen Unterstützung beim Retten von Menschenleben Allgemeine Forschungsthematik Gut entwickeltes Sicherheits- und Fehlermanagement
Schutz und Rettung von Menschen Adaptive Lösungsplattform zur Aktiven technischen Unterstützung beim Retten von Menschenleben Allgemeine Forschungsthematik Gut entwickeltes Sicherheits- und Fehlermanagement
Masterplan Green City Bremen 22. August Bürgerforum / Zukunftswerkstatt der BSAG
 Masterplan Green City Bremen 22. August 2018 - Bürgerforum / Zukunftswerkstatt der BSAG Foto: D.Schneider Masterplan Green City Bremen Ergebnispräsentation Vorstellung Maßnahmenschwerpunkte Handlungsfeld
Masterplan Green City Bremen 22. August 2018 - Bürgerforum / Zukunftswerkstatt der BSAG Foto: D.Schneider Masterplan Green City Bremen Ergebnispräsentation Vorstellung Maßnahmenschwerpunkte Handlungsfeld
Dynamisch adaptive Systemarchitektur zur Optimierung der Prozesssteuerung am Beispiel der Getreideernte
 Dynamisch adaptive Systemarchitektur zur Optimierung der Prozesssteuerung am Beispiel der Getreideernte Thilo Steckel (CLAAS) und Hans W. Griepentrog (Universität Hohenheim) VDI-MEG Kolloquium MÄHDRESCHER
Dynamisch adaptive Systemarchitektur zur Optimierung der Prozesssteuerung am Beispiel der Getreideernte Thilo Steckel (CLAAS) und Hans W. Griepentrog (Universität Hohenheim) VDI-MEG Kolloquium MÄHDRESCHER
afas Entwicklung und Erprobung eines automatisch fahrerlos fahrenden Absicherungsfahrzeuges
 Kolloquium für Fortgeschrittene Karlsruher Erfahrungsaustausch Straßenbetrieb afas Entwicklung und Erprobung eines automatisch fahrerlos fahrenden Absicherungsfahrzeuges Gerd Riegelhuth, Susanne Schulz
Kolloquium für Fortgeschrittene Karlsruher Erfahrungsaustausch Straßenbetrieb afas Entwicklung und Erprobung eines automatisch fahrerlos fahrenden Absicherungsfahrzeuges Gerd Riegelhuth, Susanne Schulz
Engineering und Betrieb Smarter Komponenten in IoT-Netzwerken für die Automatisierung der Produktion
 Institut für Automatisierungstechnik und Softwaresysteme Engineering und Betrieb Smarter Komponenten in IoT-Netzwerken für die Automatisierung der Produktion Prof. Dr.-Ing. Michael Weyrich IOT-Kongress
Institut für Automatisierungstechnik und Softwaresysteme Engineering und Betrieb Smarter Komponenten in IoT-Netzwerken für die Automatisierung der Produktion Prof. Dr.-Ing. Michael Weyrich IOT-Kongress
Entsprechend den auftretenden Bedingungen werden menschenfeindliche Umgebungen unterschieden in:
 24. März 2016 Seite 1 5 Autonome Systeme für menschenfeindliche Umgebungen Menschenfeindliche Umgebungen sind durch Bedingungen gekennzeichnet, die Menschen besonders belasten oder gefährden, wie zum Beispiel
24. März 2016 Seite 1 5 Autonome Systeme für menschenfeindliche Umgebungen Menschenfeindliche Umgebungen sind durch Bedingungen gekennzeichnet, die Menschen besonders belasten oder gefährden, wie zum Beispiel
Fliegendes Lokalisierungssystem für die Rettung und Bergung von Verschütteten
 Fliegendes Lokalisierungssystem für die Rettung und Bergung von Verschütteten Sebastian Schmitz Prof. Dr.-Ing. Ompe Aimé Mudimu Technische Hochschule Köln Institut für Rettungsingenieurwesen und Gefahrenabwehr
Fliegendes Lokalisierungssystem für die Rettung und Bergung von Verschütteten Sebastian Schmitz Prof. Dr.-Ing. Ompe Aimé Mudimu Technische Hochschule Köln Institut für Rettungsingenieurwesen und Gefahrenabwehr
Autonome Mobile Serviceroboter. Investition in Ihre Zukunft
 Monty (/ http://www.anybots.com ) Investition in Ihre Zukunft gefördert durch die Europäische Union Europäischer Fonds für regionale Entwicklung und das Land Baden-Württemberg Hochschule Ulm University
Monty (/ http://www.anybots.com ) Investition in Ihre Zukunft gefördert durch die Europäische Union Europäischer Fonds für regionale Entwicklung und das Land Baden-Württemberg Hochschule Ulm University
VON DER KAMERAKALIBRIERUNG ZUM AUTOMATISIERTEN FAHREN BEATRICE APPENZELLER
 VON DER KAMERAKALIBRIERUNG ZUM AUTOMATISIERTEN FAHREN BEATRICE APPENZELLER Zu meiner Person Beatrice Appenzeller (geb. 1986), wohnhaft in Stuttgart Diplom-Ingenieurin der Geodäsie und Geoinformatik seit
VON DER KAMERAKALIBRIERUNG ZUM AUTOMATISIERTEN FAHREN BEATRICE APPENZELLER Zu meiner Person Beatrice Appenzeller (geb. 1986), wohnhaft in Stuttgart Diplom-Ingenieurin der Geodäsie und Geoinformatik seit
INVENTAIRY INVENTUR MIT AUTONOMEN FLUGROBOTERN
 INVENTAIRY INVENTUR MIT AUTONOMEN FLUGROBOTERN Hannover, CPS.HUB NRW, 27. April 2016 Martin Fiedler, Fraunhofer IML Fraunhofer Slide 1 Das Fraunhofer Institut für Materialfluss und Logistik IML Logistik
INVENTAIRY INVENTUR MIT AUTONOMEN FLUGROBOTERN Hannover, CPS.HUB NRW, 27. April 2016 Martin Fiedler, Fraunhofer IML Fraunhofer Slide 1 Das Fraunhofer Institut für Materialfluss und Logistik IML Logistik
Fahrerlose Transportsysteme werden wirtschaftlicher und schneller Zwei Innovationen werden Wirklichkeit
 LogiMAT 2012, 13.-15. März 2012, Neue Messe Stuttgart Fachforum am 14. März 2012 (Forum V Halle 9) Die FTS-Technik im Umbruch Neue Anwendungsmöglichkeiten mit neuen Konzepten Fahrerlose Transportsysteme
LogiMAT 2012, 13.-15. März 2012, Neue Messe Stuttgart Fachforum am 14. März 2012 (Forum V Halle 9) Die FTS-Technik im Umbruch Neue Anwendungsmöglichkeiten mit neuen Konzepten Fahrerlose Transportsysteme
FASZINATION TRANSPORTROBOTIK
 FASZINATION TRANSPORTROBOTIK AUS FASZINATION FÜR DIE BEWEGUNG, MIT MUT ZUM FORTSCHRITT SCHAFFEN WIR INTELLIGENTE TRANSPORTROBOTIK, DIE UNSERE ARBEIT SICHERER UND UNSER LEBEN LEICHTER MACHT. FASZINATION
FASZINATION TRANSPORTROBOTIK AUS FASZINATION FÜR DIE BEWEGUNG, MIT MUT ZUM FORTSCHRITT SCHAFFEN WIR INTELLIGENTE TRANSPORTROBOTIK, DIE UNSERE ARBEIT SICHERER UND UNSER LEBEN LEICHTER MACHT. FASZINATION
Forschungs- und Entwicklungsprojekte
 Forschungs- und Entwicklungsprojekte Programm zur Innovationsförderung des Bundesministeriums für Ernährung, Landwirtschaft und Verbraucherschutz 162 Sektion 6: Technik (Sensorik im Pflanzenbau) Sektion
Forschungs- und Entwicklungsprojekte Programm zur Innovationsförderung des Bundesministeriums für Ernährung, Landwirtschaft und Verbraucherschutz 162 Sektion 6: Technik (Sensorik im Pflanzenbau) Sektion
Capturing Reality Hoch aufgelöste statische und dynamische Kartierung für hochautomatisiertes Fahren.
 Capturing Reality Hoch aufgelöste statische und dynamische Kartierung für hochautomatisiertes Fahren www.joanneum.at/digital Wozu braucht mein Auto eine Karte? 2 Mensch als Fahrer: Karte wird zum Navigieren
Capturing Reality Hoch aufgelöste statische und dynamische Kartierung für hochautomatisiertes Fahren www.joanneum.at/digital Wozu braucht mein Auto eine Karte? 2 Mensch als Fahrer: Karte wird zum Navigieren
Brennstoffzellen Range Extender für Nutzfahrzeuge - HyRange. Berlin, 01./ Sebastian Goldner Proton Motor Fuel Cell GmbH Head of Sales
 Brennstoffzellen Range Extender für Nutzfahrzeuge - HyRange Berlin, 01./02.06.2015 Sebastian Goldner Proton Motor Fuel Cell GmbH Head of Sales Überblick Vorhaben: Brennstoffzellen Range Extender für Nutzfahrzeuge
Brennstoffzellen Range Extender für Nutzfahrzeuge - HyRange Berlin, 01./02.06.2015 Sebastian Goldner Proton Motor Fuel Cell GmbH Head of Sales Überblick Vorhaben: Brennstoffzellen Range Extender für Nutzfahrzeuge
UPNS4D+: Selektive Gewinnung geringhaltiger Lagerstätten durch Untertagerobotik
 UPNS4D+: Selektive Gewinnung geringhaltiger Lagerstätten durch Untertagerobotik Dr. Matthias Rabel, indurad GmbH Koordinator: Dr. Reik Winkel, indurad GmbH Förderkennzeichen: 033R126A Verbundpartner XGraphic
UPNS4D+: Selektive Gewinnung geringhaltiger Lagerstätten durch Untertagerobotik Dr. Matthias Rabel, indurad GmbH Koordinator: Dr. Reik Winkel, indurad GmbH Förderkennzeichen: 033R126A Verbundpartner XGraphic
Out of the box: Flexible fahrerlose Transportfahrzeuge für den Mittelstand
 Institut für Integrierte Produktion Hannover Out of the box: Flexible fahrerlose Transportfahrzeuge für den Mittelstand Dr. Björn Eilert, IPH - Institut für Integrierte Produktion ggmbh BVL-Forum Solution
Institut für Integrierte Produktion Hannover Out of the box: Flexible fahrerlose Transportfahrzeuge für den Mittelstand Dr. Björn Eilert, IPH - Institut für Integrierte Produktion ggmbh BVL-Forum Solution
Sensorsimulation in Hardware in the Loop-Anwendungen
 Sensorsimulation in Hardware in the Loop-Anwendungen Kristian Trenkel, Florian Spiteller Echtzeit 2014 20.11.2014 Gliederung I. Einführung II. Problemstellung III. Anforderungen an eine Sensorsimulation
Sensorsimulation in Hardware in the Loop-Anwendungen Kristian Trenkel, Florian Spiteller Echtzeit 2014 20.11.2014 Gliederung I. Einführung II. Problemstellung III. Anforderungen an eine Sensorsimulation
1.4! Einführung. Systemmodellierung. Methoden und Werkzeuge
 Einführung. Vorbemerkungen und Überblick. Die elektronischen e des Fahrzeugs. Prozesse in der Fahrzeugentwicklung im Überblick,.4 Grundlagen. Steuerungs- und regelungstechnische e (Prof. Schumacher). Diskrete
Einführung. Vorbemerkungen und Überblick. Die elektronischen e des Fahrzeugs. Prozesse in der Fahrzeugentwicklung im Überblick,.4 Grundlagen. Steuerungs- und regelungstechnische e (Prof. Schumacher). Diskrete
SP 34 Mobile Arbeitsmaschinen Vorstellung des Schwerpunktes am
 SP 34 Mobile Arbeitsmaschinen Vorstellung des Schwerpunktes am 13.11.2013 Prof. Dr.-Ing. Marcus Geimer Lehrstuhl für Mobile Arbeitsmaschinen, Institutsleiter: Prof. Dr.-Ing. Marcus Geimer KIT Universität
SP 34 Mobile Arbeitsmaschinen Vorstellung des Schwerpunktes am 13.11.2013 Prof. Dr.-Ing. Marcus Geimer Lehrstuhl für Mobile Arbeitsmaschinen, Institutsleiter: Prof. Dr.-Ing. Marcus Geimer KIT Universität
6. KIRAS Fachtagung 18. Oktober 2016, Wien. RelCon. Reliable Control of Semi-Autonomous Platforms
 6. KIRAS Fachtagung 18. Oktober 2016, Wien Reliable Control of Semi-Autonomous Platforms Verlässliche Führung semi-autonomer Fahrzeuge Förderprogramm: KIRAS Fördergeber: BMVIT / FFG Budget: Gesamt: ca.
6. KIRAS Fachtagung 18. Oktober 2016, Wien Reliable Control of Semi-Autonomous Platforms Verlässliche Führung semi-autonomer Fahrzeuge Förderprogramm: KIRAS Fördergeber: BMVIT / FFG Budget: Gesamt: ca.
CARRY TUGGER FORKLIFT CUSTOMIZED. Intralogistik Mobile Robotik
 CARRY TUGGER FORKLIFT CUSTOMIZED Intralogistik Mobile Robotik 2 Grenzebach schließt die Automatisierungslücke Das Familienunternehmen Grenzebach ist seit Generationen ein verlässlicher, innovativer Anbieter
CARRY TUGGER FORKLIFT CUSTOMIZED Intralogistik Mobile Robotik 2 Grenzebach schließt die Automatisierungslücke Das Familienunternehmen Grenzebach ist seit Generationen ein verlässlicher, innovativer Anbieter
PROTOTYPENTWICKLUNG VON ELEKTRONISCHEN KOMPONENTEN FÜR DIE EINBETTUNG IN MATERIAL-HETEROGENEN ANWENDUNGEN
 PROTOTYPENTWICKLUNG VON ELEKTRONISCHEN KOMPONENTEN FÜR DIE EINBETTUNG IN MATERIAL-HETEROGENEN ANWENDUNGEN Steffen Rülke Fraunhofer-Institut für Integrierte Schaltungen IIS, EAS Dresden Fraunhofer IIS /
PROTOTYPENTWICKLUNG VON ELEKTRONISCHEN KOMPONENTEN FÜR DIE EINBETTUNG IN MATERIAL-HETEROGENEN ANWENDUNGEN Steffen Rülke Fraunhofer-Institut für Integrierte Schaltungen IIS, EAS Dresden Fraunhofer IIS /
Industrie 4.0 Aktueller Stand und Potenziale für die Entsorgungslogistik
 Industrie 4.0 Aktueller Stand und Potenziale für die Entsorgungslogistik Dipl.-Ing. Sandra Giern BDE Fachreferentin für Logistik, Abfallbehandlung und Sonderabfallwirtschaft Digitalisierung in der Abfallwirtschaft
Industrie 4.0 Aktueller Stand und Potenziale für die Entsorgungslogistik Dipl.-Ing. Sandra Giern BDE Fachreferentin für Logistik, Abfallbehandlung und Sonderabfallwirtschaft Digitalisierung in der Abfallwirtschaft
IKT in der Automation am Beispiel der Lemgoer Modellfabrik
 IKT in der Automation am Beispiel der Lemgoer Modellfabrik Benedikt Lücke init - Institut für industrielle Informationstechnik Hochschule Ostwestfalen-Lippe Liebigstrasse 87, D-32657 Lemgo Hannover Messe
IKT in der Automation am Beispiel der Lemgoer Modellfabrik Benedikt Lücke init - Institut für industrielle Informationstechnik Hochschule Ostwestfalen-Lippe Liebigstrasse 87, D-32657 Lemgo Hannover Messe
Cyber-X-Systeme Robotik/KI in Automatisierungs-Anwendungen 2026
 Cyber-X-Systeme Robotik/KI in Automatisierungs-Anwendungen 2026 marion-abschlussmeilenstein bei CLAAS Prof. Dr. Joachim Hertzberg - DFKI Cyber-X-Systeme marion-abschlussmeilenstein 19.09.2013 Prof. Dr.
Cyber-X-Systeme Robotik/KI in Automatisierungs-Anwendungen 2026 marion-abschlussmeilenstein bei CLAAS Prof. Dr. Joachim Hertzberg - DFKI Cyber-X-Systeme marion-abschlussmeilenstein 19.09.2013 Prof. Dr.
i-mass integriertes Maschinen Sensor System
 i-mass integriertes Maschinen Sensor System IMR Institut für Maschinen in der Rohstoffindustrie Dr.-Ing. Ralph Baltes Dortmund, Gliederung Vorstellung des IMR Motivation Projektvorstellung Anwendungsbeispiele
i-mass integriertes Maschinen Sensor System IMR Institut für Maschinen in der Rohstoffindustrie Dr.-Ing. Ralph Baltes Dortmund, Gliederung Vorstellung des IMR Motivation Projektvorstellung Anwendungsbeispiele
Entwicklung einer vereinfachten UAV-Kontrollstation für die Anwendung in einem Hubschraubercockpit. Dr.-Ing. G. Strickert
 Entwicklung einer vereinfachten UAV-Kontrollstation für die Anwendung in einem Hubschraubercockpit Dr.-Ing. G. Strickert Motivation Bedarf der Heeresflieger (Erkundung, Aufklärung, Unterstützung, Transport
Entwicklung einer vereinfachten UAV-Kontrollstation für die Anwendung in einem Hubschraubercockpit Dr.-Ing. G. Strickert Motivation Bedarf der Heeresflieger (Erkundung, Aufklärung, Unterstützung, Transport
Lehrangebot IuK-Projekt ab Sommersemester 2018
 Lehrangebot IuK-Projekt ab Sommersemester 2018 Bachelorstudiengang Informations- und Kommunikationstechnik Prof. Jörg Thiem http://www.fh-dortmund.de/thiem mailto:joerg.thiem@fh-dortmund.de Organisatorisches
Lehrangebot IuK-Projekt ab Sommersemester 2018 Bachelorstudiengang Informations- und Kommunikationstechnik Prof. Jörg Thiem http://www.fh-dortmund.de/thiem mailto:joerg.thiem@fh-dortmund.de Organisatorisches
Systemanforderungen im Entwurf Elektro-Mechanischer Antriebe
 7. Tagung Feinwerktechnische Konstruktion Systemanforderungen im Entwurf Elektro-Mechanischer Antriebe Dr. René Beckert Geschäftsführer EMEC-Prototyping UG Spezifikation/ Anforderungsanalyse Anforderungen
7. Tagung Feinwerktechnische Konstruktion Systemanforderungen im Entwurf Elektro-Mechanischer Antriebe Dr. René Beckert Geschäftsführer EMEC-Prototyping UG Spezifikation/ Anforderungsanalyse Anforderungen
Wie Industrie 4.0 unser Leben umkrempelt Eine Einführung in die Begriffswelt
 Wie Industrie 4.0 unser Leben umkrempelt Eine Einführung in die Begriffswelt Prof. Dr. Jürg Luthiger Fachhochschule Nordwestschweiz Hochschule für Technik Institut für Mobile und Verteilte Systeme Zu meiner
Wie Industrie 4.0 unser Leben umkrempelt Eine Einführung in die Begriffswelt Prof. Dr. Jürg Luthiger Fachhochschule Nordwestschweiz Hochschule für Technik Institut für Mobile und Verteilte Systeme Zu meiner
Nach dem Hochwasser ist vor dem Hochwasser Freiwillige Helfer koordinieren, aber wie?
 Nach dem Hochwasser ist vor dem Hochwasser Freiwillige Helfer koordinieren, aber wie? Hans Betke, Sebastian Lindner Lehrstuhl für Wirtschaftsinformatik, insb. Betriebliches Informationsmanagement 26. September
Nach dem Hochwasser ist vor dem Hochwasser Freiwillige Helfer koordinieren, aber wie? Hans Betke, Sebastian Lindner Lehrstuhl für Wirtschaftsinformatik, insb. Betriebliches Informationsmanagement 26. September
Koordinator: Indurad GmbH Teilprojektleitung: Prof. Ingrid Scholl, Institut MASKOR Förderkennzeichen: 033R126(A-H)
") FKZ: 033R126(A-H) UPNS4D+: Untertägiges 4D+ Positionierungs-, Navigations- und Mapping-System zur hochselektiven, effizienten und im höchsten Maße sicheren Gewinnung wirtschaftsstrategischer Rohstoffe
FKZ: 033R126(A-H) UPNS4D+: Untertägiges 4D+ Positionierungs-, Navigations- und Mapping-System zur hochselektiven, effizienten und im höchsten Maße sicheren Gewinnung wirtschaftsstrategischer Rohstoffe
Unternehmenspräsentation LEONI-Gruppe
 Unternehmenspräsentation LEONI-Gruppe Agenda Spotlights Vision Zahlen Märkte und Produkte Innovation und Kundennutzen 3 Unternehmenspräsentation Spotlights Aktuelle Themen aus der LEONI-Gruppe Produktinnovation
Unternehmenspräsentation LEONI-Gruppe Agenda Spotlights Vision Zahlen Märkte und Produkte Innovation und Kundennutzen 3 Unternehmenspräsentation Spotlights Aktuelle Themen aus der LEONI-Gruppe Produktinnovation
ROBOTOP. Automatisierungspotenziale gemeinsam erkennen und Lösungen visualisieren
 ROBOTOP Automatisierungspotenziale gemeinsam erkennen und Lösungen visualisieren 1 1 2 3 4 5 6 7 Projektziele ROBOTOP Plattform Best Practice Beispielkonfiguration Komponentendatenbank & Kompatibilitätscheck
ROBOTOP Automatisierungspotenziale gemeinsam erkennen und Lösungen visualisieren 1 1 2 3 4 5 6 7 Projektziele ROBOTOP Plattform Best Practice Beispielkonfiguration Komponentendatenbank & Kompatibilitätscheck
Flugroboter Zivile Einsatzmöglichkeiten und Katastrophenschutz
 FZI RESEARCH CENTER FOR INFORMATION TECHNOLOGY Flugroboter Zivile Einsatzmöglichkeiten und Katastrophenschutz Erfahrungen beim Einsatz in der Katastrophenschutzübung Taranis 2013 Georg Heppner Übersicht
FZI RESEARCH CENTER FOR INFORMATION TECHNOLOGY Flugroboter Zivile Einsatzmöglichkeiten und Katastrophenschutz Erfahrungen beim Einsatz in der Katastrophenschutzübung Taranis 2013 Georg Heppner Übersicht
Szenarien für innovative Sicherheitslösungen und Service-Portale
 und Service-Portale Harald Klaus Deutsche Telekom AG 3. AAL-Kongress Berlin, 26. 27. Januar 2010 Selbstständig, sicher, gesund und mobil im Alter. Agenda. Kern-Szenarien in SmartSenior Methodisches Vorgehen
und Service-Portale Harald Klaus Deutsche Telekom AG 3. AAL-Kongress Berlin, 26. 27. Januar 2010 Selbstständig, sicher, gesund und mobil im Alter. Agenda. Kern-Szenarien in SmartSenior Methodisches Vorgehen
Unternehmenspräsentation LEONI-Gruppe
 Unternehmenspräsentation LEONI-Gruppe Agenda Spotlights Vision Zahlen Märkte und Produkte Innovation und Kundennutzen 4 Spotlights Aktuelle Themen aus der LEONI-Gruppe Kooperation mit Diehl Systemlösungen
Unternehmenspräsentation LEONI-Gruppe Agenda Spotlights Vision Zahlen Märkte und Produkte Innovation und Kundennutzen 4 Spotlights Aktuelle Themen aus der LEONI-Gruppe Kooperation mit Diehl Systemlösungen
6. VDE/ZVEI Symposium Mikroelektronik 2016
 6. VDE/ZVEI Symposium Mikroelektronik 2016 Mikroelektronik: Schlüsseltechnologie für automatisiertes Fahren Helmut Matschi Auf dem Weg zum Hochautomatisierten Fahren - intelligent und vernetzt 20. September
6. VDE/ZVEI Symposium Mikroelektronik 2016 Mikroelektronik: Schlüsseltechnologie für automatisiertes Fahren Helmut Matschi Auf dem Weg zum Hochautomatisierten Fahren - intelligent und vernetzt 20. September
Brauchen wir einen Atlas der digitalen Region Rhein-Neckar?
 Geoinformation ist überall Brauchen wir einen Atlas der digitalen Region Rhein-Neckar? Deutschland intelligent vernetzt Ludwigshafen, den 12.10.2016 Hartmut Gündra Clustermanager GeoNet.MRN e.v. Zielfelder
Geoinformation ist überall Brauchen wir einen Atlas der digitalen Region Rhein-Neckar? Deutschland intelligent vernetzt Ludwigshafen, den 12.10.2016 Hartmut Gündra Clustermanager GeoNet.MRN e.v. Zielfelder
Aktuell. Quelle: ORF Steiermark
 SARONTAR Search And Rescue Optimisation by satellite Navigation Technologies in Alpine Regions Der Wettlauf gegen die Zeit bei Unfällen im alpinen Gelände Hans-Peter Ranner Bad Reichenhall, 20./21. November
SARONTAR Search And Rescue Optimisation by satellite Navigation Technologies in Alpine Regions Der Wettlauf gegen die Zeit bei Unfällen im alpinen Gelände Hans-Peter Ranner Bad Reichenhall, 20./21. November
«Logistik Das vernetzte Fahrzeug» Daniel Thommen LOSTnFOUND
 «Logistik 4.0 - Das vernetzte Fahrzeug» Daniel Thommen LOSTnFOUND «Unsere Welt verändert sich in Richtung Industrie 4.0..» Unsere Welt verändert sich.. «Die erste industrielle Revolution bestand in der
«Logistik 4.0 - Das vernetzte Fahrzeug» Daniel Thommen LOSTnFOUND «Unsere Welt verändert sich in Richtung Industrie 4.0..» Unsere Welt verändert sich.. «Die erste industrielle Revolution bestand in der
afas - automatisch fahrerlos fahrendes Absicherungsfahrzeug für Arbeitsstellen auf Autobahnen
 afas - automatisch fahrerlos fahrendes Absicherungsfahrzeug für Arbeitsstellen auf Autobahnen Version 01-00-00 www.afas-online.de Forschungsprojekt afas demonstriert die Projektergebnisse eines fahrerlos
afas - automatisch fahrerlos fahrendes Absicherungsfahrzeug für Arbeitsstellen auf Autobahnen Version 01-00-00 www.afas-online.de Forschungsprojekt afas demonstriert die Projektergebnisse eines fahrerlos
Förderprogramme Informations- und Kommunikationstechnik & Elektronische Systeme in Bayern
 Förderprogramme Informations- und Kommunikationstechnik & Elektronische Systeme in Bayern Dr. Jürgen Dam VDI/VDE Innovation + Technik GmbH juergen.dam@vdivde-it.de VDI/VDE Innovation + Technik GmbH Gegründet:
Förderprogramme Informations- und Kommunikationstechnik & Elektronische Systeme in Bayern Dr. Jürgen Dam VDI/VDE Innovation + Technik GmbH juergen.dam@vdivde-it.de VDI/VDE Innovation + Technik GmbH Gegründet:
Simulation gekoppelter Systeme Fluidon Konferenz 2009, 10./11. November 2009
 Simulation gekoppelter Systeme Fluidon Konferenz 2009, 10./11. November 2009 Dipl.-Ing. Lars Völker Dipl.-Ing. Song Han KIT Universität des Landes Baden-Württemberg und nationales Großforschungszentrum
Simulation gekoppelter Systeme Fluidon Konferenz 2009, 10./11. November 2009 Dipl.-Ing. Lars Völker Dipl.-Ing. Song Han KIT Universität des Landes Baden-Württemberg und nationales Großforschungszentrum
SENEKA Sensornetzwerk mit mobilen Robotern für das Katastrophenmanagement
 Fraunhofer Zukunftsthemen»Märkte von Übermorgen«SENEKA Sensornetzwerk mit mobilen Robotern für das Katastrophenmanagement 1 Beteiligte Fraunhofer-Institute Itzehoe Lübeck Rostock Bremerhaven Hamburg Oldenburg
Fraunhofer Zukunftsthemen»Märkte von Übermorgen«SENEKA Sensornetzwerk mit mobilen Robotern für das Katastrophenmanagement 1 Beteiligte Fraunhofer-Institute Itzehoe Lübeck Rostock Bremerhaven Hamburg Oldenburg
M2M Kommunikation im Agrarsektor
 M2M Kommunikation im Agrarsektor Dr. Hans-Peter Grothaus Leiter Entwicklung systembasierte Dienstleistungen Agenda 1 Das Unternehmen CLAAS 2 M2M und Telemetrie in der Landwirtschaft 3 Wege in eine vernetzte
M2M Kommunikation im Agrarsektor Dr. Hans-Peter Grothaus Leiter Entwicklung systembasierte Dienstleistungen Agenda 1 Das Unternehmen CLAAS 2 M2M und Telemetrie in der Landwirtschaft 3 Wege in eine vernetzte
Datentransfer in der Landwirtschaft heute und in der Zukunft. Marcel Wieditz, Leiter Vertrieb EASY Produkte CLAAS Vertriebsgesellschaft mbh
 Datentransfer in der Landwirtschaft heute und in der Zukunft Marcel Wieditz, Leiter Vertrieb EASY Produkte CLAAS Vertriebsgesellschaft mbh Agenda Welche Rolle spielen digitale Daten in der Landwirtschaft?
Datentransfer in der Landwirtschaft heute und in der Zukunft Marcel Wieditz, Leiter Vertrieb EASY Produkte CLAAS Vertriebsgesellschaft mbh Agenda Welche Rolle spielen digitale Daten in der Landwirtschaft?
XI. Forschungs- und Technologieforum. Industrie 4.0. Notwendiges Übel für technologieorintierte KMU? Schmitz Cargobull Gotha GmbH,
 XI. Forschungs- und Technologieforum Industrie 4.0 Notwendiges Übel für technologieorintierte KMU? Olaf Mollenhauer Schmitz Cargobull Gotha GmbH, 08.05.2014, Headlines CPS als Basis für Industrie 4.0 Geschäftsfelder
XI. Forschungs- und Technologieforum Industrie 4.0 Notwendiges Übel für technologieorintierte KMU? Olaf Mollenhauer Schmitz Cargobull Gotha GmbH, 08.05.2014, Headlines CPS als Basis für Industrie 4.0 Geschäftsfelder
Alexander Kirchbeck Claas Selbstfahrende Erntemaschinen GmbH
 Alexander Kirchbeck Claas Selbstfahrende Erntemaschinen GmbH Alexander Kirchbeck absolvierte von 2003 bis 2006 ein duales Studium in Kooperation mit der Firma Claas zum Diplom Wirtschaftsingenieur (BA).
Alexander Kirchbeck Claas Selbstfahrende Erntemaschinen GmbH Alexander Kirchbeck absolvierte von 2003 bis 2006 ein duales Studium in Kooperation mit der Firma Claas zum Diplom Wirtschaftsingenieur (BA).
Technische Entwicklungen für FTS schaffen neue Anwendungen Die Projekte KaTe und SaLsA im Überblick
 Hannover Messe 2012, 23.-27. April 2012 Forum Robotics, Automation und Vision am 25. April 2012 Stand C 38 in Halle 17 Technische Entwicklungen für FTS schaffen neue Anwendungen Die Projekte KaTe und SaLsA
Hannover Messe 2012, 23.-27. April 2012 Forum Robotics, Automation und Vision am 25. April 2012 Stand C 38 in Halle 17 Technische Entwicklungen für FTS schaffen neue Anwendungen Die Projekte KaTe und SaLsA
Simulation von Baumaschinen mit Modelica
 Simulation von Baumaschinen mit Modelica Timo Penndorf Modelica User Group Baden-Württemberg 10. Oktober 2013 2 / 15 Agenda Überblick über die Systemsimulation mobiler Arbeitsmaschinen Allgemeine Modellstrukturen
Simulation von Baumaschinen mit Modelica Timo Penndorf Modelica User Group Baden-Württemberg 10. Oktober 2013 2 / 15 Agenda Überblick über die Systemsimulation mobiler Arbeitsmaschinen Allgemeine Modellstrukturen
Die Strategie der Bundesregierung beim automatisierten und vernetzten Fahren
 Die Strategie der Bundesregierung beim automatisierten und vernetzten Fahren Dr. Tobias Miethaner, Leiter der Abteilung Digitale Gesellschaft Bundesministerium für Verkehr und digitale Infrastruktur AAET
Die Strategie der Bundesregierung beim automatisierten und vernetzten Fahren Dr. Tobias Miethaner, Leiter der Abteilung Digitale Gesellschaft Bundesministerium für Verkehr und digitale Infrastruktur AAET
Feedbackmanagement. Impulse und Grundlagen für strategisch richtige Entscheidungen IWOfurn Summit Auf den Weg zu Mittelstand 4.
 Feedbackmanagement Impulse und Grundlagen für strategisch richtige Entscheidungen 24.11.2016 - IWOfurn Summit Auf den Weg zu Mittelstand 4.0 1 Klaus Bröhl Gründer & Geschäftsführer IWOfurn Service GmbH
Feedbackmanagement Impulse und Grundlagen für strategisch richtige Entscheidungen 24.11.2016 - IWOfurn Summit Auf den Weg zu Mittelstand 4.0 1 Klaus Bröhl Gründer & Geschäftsführer IWOfurn Service GmbH
Innovationsplattform Schutz und Rettung von Menschen, 25.06.2009 Verbundforschungsprojekt SECURITY2People
 Innovationsplattform Schutz und Rettung von Menschen, 25.06.2009 Verbundforschungsprojekt SECURITY Ralf Kaschow Verbundkoordinator CAE Elektronik GmbH + 49-(0) 2402/106-593 ralf.kaschow@cae.com Projekt-Daten
Innovationsplattform Schutz und Rettung von Menschen, 25.06.2009 Verbundforschungsprojekt SECURITY Ralf Kaschow Verbundkoordinator CAE Elektronik GmbH + 49-(0) 2402/106-593 ralf.kaschow@cae.com Projekt-Daten
Durchgängiger Entwicklungsprozess für den Maschinen- und Anlagenbau am Beispiel einer Holzbearbeitungsmaschine (Hüttenhölscher Maschinenbau)
") Session: 2 Durchgängiger Entwicklungsprozess für den Maschinen- und Anlagenbau am Beispiel einer Holzbearbeitungsmaschine (Hüttenhölscher Maschinenbau) 10./11. Oktober 2017 Lemgo www.its-owl.de Agenda
Session: 2 Durchgängiger Entwicklungsprozess für den Maschinen- und Anlagenbau am Beispiel einer Holzbearbeitungsmaschine (Hüttenhölscher Maschinenbau) 10./11. Oktober 2017 Lemgo www.its-owl.de Agenda
Dezentrale, verteilte Steuerung flächiger Fördersysteme für den innerbetrieblichen Materialfluss
 Dezentrale, verteilte Steuerung flächiger Fördersysteme für den innerbetrieblichen Materialfluss Wissenschaftspreis Logistik 28.10.2015 Inhalt Was ist das zu lösende praktische Problem? Was ist die wissenschaftliche
Dezentrale, verteilte Steuerung flächiger Fördersysteme für den innerbetrieblichen Materialfluss Wissenschaftspreis Logistik 28.10.2015 Inhalt Was ist das zu lösende praktische Problem? Was ist die wissenschaftliche
SENEKA Sensornetzwerk mit mobilen Robotern für das Katastrophenmanagement
 Fraunhofer Zukunftsthemen»Märkte von Übermorgen«SENEKA Sensornetzwerk mit mobilen Robotern für das Katastrophenmanagement 1 Beteiligte Fraunhofer-Institute Itzehoe Lübeck Rostock Bremerhaven Hamburg Oldenburg
Fraunhofer Zukunftsthemen»Märkte von Übermorgen«SENEKA Sensornetzwerk mit mobilen Robotern für das Katastrophenmanagement 1 Beteiligte Fraunhofer-Institute Itzehoe Lübeck Rostock Bremerhaven Hamburg Oldenburg
Autonomer Öffentlicher Nahverkehr im ländlichen Raum (Landkreis Ostprignitz- Ruppin) (AutoNV_OPR)
 (AutoNV_OPR)") Autonomer Öffentlicher Nahverkehr im ländlichen Raum (Landkreis Ostprignitz- Ruppin) (AutoNV_OPR) Gefördert durch das Bundesministerium für Verkehr und digitale Infrastruktur (BMVI) aus Mitteln des Forschungsprogramms
Autonomer Öffentlicher Nahverkehr im ländlichen Raum (Landkreis Ostprignitz- Ruppin) (AutoNV_OPR) Gefördert durch das Bundesministerium für Verkehr und digitale Infrastruktur (BMVI) aus Mitteln des Forschungsprogramms
Das zentrale Werkzeug für kürzere Entwicklungs- und Releasezyklen von software-basierten Kundenfunktionen in der Automobilindustrie
 Virtualisierung Das zentrale Werkzeug für kürzere Entwicklungs- und Releasezyklen von software-basierten Kundenfunktionen in der Automobilindustrie 3. Automobil Symposium Wildau Strenge, Alexander (CQPP),
Virtualisierung Das zentrale Werkzeug für kürzere Entwicklungs- und Releasezyklen von software-basierten Kundenfunktionen in der Automobilindustrie 3. Automobil Symposium Wildau Strenge, Alexander (CQPP),
ABSICHERUNGS- UND BEWERTUNGSMETHODEN FÜR KOOPERATIVE HOCHAUTOMATISIERTE FAHRZEUGE
 ABSICHERUNGS- UND BEWERTUNGSMETHODEN FÜR KOOPERATIVE HOCHAUTOMATISIERTE FAHRZEUGE AAET-2017, Braunschweig Sven Hallerbach, Ulrich Eberle (Adam Opel AG) Frank Köster (DLR) www.opel.com MOTIVATION Kooperatives
ABSICHERUNGS- UND BEWERTUNGSMETHODEN FÜR KOOPERATIVE HOCHAUTOMATISIERTE FAHRZEUGE AAET-2017, Braunschweig Sven Hallerbach, Ulrich Eberle (Adam Opel AG) Frank Köster (DLR) www.opel.com MOTIVATION Kooperatives
FRAUNHOFER-INSTITUT FÜR. Antriebssysteme und Exoskelette
 FRAUNHOFER-INSTITUT FÜR Produktionstechnik und Automatisierung IPA Antriebssysteme und Exoskelette MOTIVATION ANGEBOT Mobilität ist eines der Grundbedürfnisse des Menschen und gerät durch den voranschreitenden
FRAUNHOFER-INSTITUT FÜR Produktionstechnik und Automatisierung IPA Antriebssysteme und Exoskelette MOTIVATION ANGEBOT Mobilität ist eines der Grundbedürfnisse des Menschen und gerät durch den voranschreitenden
Radikaler Umbruch in der Fahrzeug- und Systemabsicherung. Steffen Kuhn
 Radikaler Umbruch in der Fahrzeug- und Systemabsicherung Steffen Kuhn 21.04.2016 Autonomes Fahren ist das erklärte Ziel von Automobilherstellern, Zulieferern und Dienstleistern In Zukunft muss nicht nur
Radikaler Umbruch in der Fahrzeug- und Systemabsicherung Steffen Kuhn 21.04.2016 Autonomes Fahren ist das erklärte Ziel von Automobilherstellern, Zulieferern und Dienstleistern In Zukunft muss nicht nur
FRAUNHOFER-INSTITUT FÜR PRODUKTIONSTECHNIK UND AUTOMATISIERUNG IPA ANTRIEBSSYSTEME UND EXOSKELETTE
 FRAUNHOFER-INSTITUT FÜR PRODUKTIONSTECHNIK UND AUTOMATISIERUNG IPA ANTRIEBSSYSTEME UND EXOSKELETTE MOTIVATION Mobilität ist eines der Grundbedürfnisse des Menschen und gerät durch den voranschreitenden
FRAUNHOFER-INSTITUT FÜR PRODUKTIONSTECHNIK UND AUTOMATISIERUNG IPA ANTRIEBSSYSTEME UND EXOSKELETTE MOTIVATION Mobilität ist eines der Grundbedürfnisse des Menschen und gerät durch den voranschreitenden
Anforderungen an automatisierte und vernetzte Fahrfunktionen Fachtagung Intelligente Lösungen für effiziente Mobilität Dipl.-Psych.
 Anforderungen an automatisierte und vernetzte Fahrfunktionen Fachtagung Intelligente Lösungen für effiziente Mobilität Dipl.-Psych. Udo Schüppel, Zentrale Stelle nach StVG Dresden, 15.09.2016 FSD Zentrale
Anforderungen an automatisierte und vernetzte Fahrfunktionen Fachtagung Intelligente Lösungen für effiziente Mobilität Dipl.-Psych. Udo Schüppel, Zentrale Stelle nach StVG Dresden, 15.09.2016 FSD Zentrale
::::::::::::::::::::::::::::::::::::::::::::::::::::::::::::::::::::::::::::::::::::::::::::::::::::::::::::::::::::::::::::::::::::::::::::
 Bevölkerungsschutz im föderalen System Krisenmanagement, Katastrophenschutz und Zivilschutz NRW. :2 ::::::::::::::::::::::::::::::::::::::::::::::::::::::::::::::::::::::::::::::::::::::::::::::::::::::::::::::::::::::::::::::::::::::::::::
Bevölkerungsschutz im föderalen System Krisenmanagement, Katastrophenschutz und Zivilschutz NRW. :2 ::::::::::::::::::::::::::::::::::::::::::::::::::::::::::::::::::::::::::::::::::::::::::::::::::::::::::::::::::::::::::::::::::::::::::::
BMBF-Innovationsforum Zivile Sicherheit
 BMBF-Innovationsforum Zivile Sicherheit Simulationsbasierte Notfallkonzepte für komplexe Logistiksysteme Dr. Hendrik Wildebrand Institut für Seeverkehrswirtschaft und Logistik wildebrand@isl.org Projektkonsortium
BMBF-Innovationsforum Zivile Sicherheit Simulationsbasierte Notfallkonzepte für komplexe Logistiksysteme Dr. Hendrik Wildebrand Institut für Seeverkehrswirtschaft und Logistik wildebrand@isl.org Projektkonsortium
Agenda Abschlusspräsentation
 Session: 1 Entwicklung eines HiL-Prüfstandes zum modellbasierten Entwurf und zur Analyse selbstoptimierender Steuerungsund Regelungsalgorithmen dezentraler Antriebsumrichter (MSF-Vathauer Antriebstechnik)
Session: 1 Entwicklung eines HiL-Prüfstandes zum modellbasierten Entwurf und zur Analyse selbstoptimierender Steuerungsund Regelungsalgorithmen dezentraler Antriebsumrichter (MSF-Vathauer Antriebstechnik)
LabVIEW Erfahrungen aus der
 Fraunhofer VolksBot mit CompactRIO und LabVIEW Erfahrungen aus der Lehrveranstaltungsreihe Teamrobotik Ansgar Bredenfeld, Fraunhofer IAIS Manuela Kanneberg, Timo Lindhorst, Edgar Nett, Otto-von-Guericke-Universität
Fraunhofer VolksBot mit CompactRIO und LabVIEW Erfahrungen aus der Lehrveranstaltungsreihe Teamrobotik Ansgar Bredenfeld, Fraunhofer IAIS Manuela Kanneberg, Timo Lindhorst, Edgar Nett, Otto-von-Guericke-Universität
Forschung für die zivile Sicherheit Hightech für die Retter
 Forschung für die zivile Sicherheit Hightech für die Retter 13. Europäischer Katastrophenschutzkongress 20. September 2017, Berlin Dr. Andreas Hoffknecht Projektträger des BMBF - Programm Forschung für
Forschung für die zivile Sicherheit Hightech für die Retter 13. Europäischer Katastrophenschutzkongress 20. September 2017, Berlin Dr. Andreas Hoffknecht Projektträger des BMBF - Programm Forschung für
DEFLAG-SICHERE DEFLAGRATION VON KAMPFMITTELN DURCH LASERTECHNOLOGIE
 DEFLAG-SICHERE DEFLAGRATION VON KAMPFMITTELN DURCH LASERTECHNOLOGIE Dr.-Ing. Jörg Hermsdorf Laser Zentrum Hannover, Germany VERBUNDPARTNER LASER on demand GmbH (LOD) Feuerwehr Hamburg / Kampfmittelräumdienst
DEFLAG-SICHERE DEFLAGRATION VON KAMPFMITTELN DURCH LASERTECHNOLOGIE Dr.-Ing. Jörg Hermsdorf Laser Zentrum Hannover, Germany VERBUNDPARTNER LASER on demand GmbH (LOD) Feuerwehr Hamburg / Kampfmittelräumdienst
LANDWIRT- SCHAFTLICHE FAHRZEUGE
 LEISTUNGSSTARKE HEBEBÜHNEN FÜR LANDWIRT- SCHAFTLICHE FAHRZEUGE STERTIL SUPERIOR SOLUTIONS Superior Solutions Stertil-Koni bietet ihren Kunden weltweit maßgeschneiderte und technisch anspruchsvolle Lösungen
LEISTUNGSSTARKE HEBEBÜHNEN FÜR LANDWIRT- SCHAFTLICHE FAHRZEUGE STERTIL SUPERIOR SOLUTIONS Superior Solutions Stertil-Koni bietet ihren Kunden weltweit maßgeschneiderte und technisch anspruchsvolle Lösungen
Digitale Technologien für neue Mobilitätslösungen
 Digitale Technologien für neue Mobilitätslösungen Kick-off der Themenplattform Vernetzte Mobilität Reinhard German 9.3.2016, Garching Informatik 7 Rechnernetze und Kommunikationssysteme Digitalisierung
Digitale Technologien für neue Mobilitätslösungen Kick-off der Themenplattform Vernetzte Mobilität Reinhard German 9.3.2016, Garching Informatik 7 Rechnernetze und Kommunikationssysteme Digitalisierung
Modellbasierte Validierung von mobilen Arbeitsmaschinen im virtuellen Fahrversuch
 Taking you to the next level Modellbasierte Validierung von mobilen Arbeitsmaschinen im virtuellen Fahrversuch Dr.-Ing. Christian Schyr, IPG Automotive GmbH, Karlsruhe Dipl.-Ing. Frank Otto, Karlsruher
Taking you to the next level Modellbasierte Validierung von mobilen Arbeitsmaschinen im virtuellen Fahrversuch Dr.-Ing. Christian Schyr, IPG Automotive GmbH, Karlsruhe Dipl.-Ing. Frank Otto, Karlsruher
Testfeld Niedersachsen Konzept / Umsetzungsplanung / Finanzierung & Partner
 Testfeld Niedersachsen Konzept / Umsetzungsplanung / Finanzierung & Partner Prof. Dr. Frank Köster Niedersächsisches Ministerium für Wirtschaft, Arbeit und Verkehr Niedersächsisches Ministerium für Wissenschaft
Testfeld Niedersachsen Konzept / Umsetzungsplanung / Finanzierung & Partner Prof. Dr. Frank Köster Niedersächsisches Ministerium für Wirtschaft, Arbeit und Verkehr Niedersächsisches Ministerium für Wissenschaft
INSPIRING ANSWERS. Wer sagt eigentlich, dass man zur Inbetriebnahme eines Feldbusgeräts hunderte Seiten Anleitung lesen muss?
 INSPIRING ANSWERS Wer sagt eigentlich, dass man zur Inbetriebnahme eines Feldbusgeräts hunderte Seiten Anleitung lesen muss? INSPIRING ANSWERS Wer immer die gleichen Fragen stellt muss sich nicht wundern,
INSPIRING ANSWERS Wer sagt eigentlich, dass man zur Inbetriebnahme eines Feldbusgeräts hunderte Seiten Anleitung lesen muss? INSPIRING ANSWERS Wer immer die gleichen Fragen stellt muss sich nicht wundern,
Efficient Production Management / Industry 4.0 Smart IT Solutions for Manufacturing Efficiency
 Peter Lindlau pol Solutions GmbH www.pol-it.de peter.lindlau@pol-it.de Telefon +49 89 55 26 57-0 Efficient Production Management / Industry 4.0 Smart IT Solutions for Manufacturing Efficiency Das Internet
Peter Lindlau pol Solutions GmbH www.pol-it.de peter.lindlau@pol-it.de Telefon +49 89 55 26 57-0 Efficient Production Management / Industry 4.0 Smart IT Solutions for Manufacturing Efficiency Das Internet
Der digitale Verkehr Wege in die Zukunft
 Der digitale Verkehr Wege in die Zukunft Andreas Krüger www.bmvi.de Digitale Wandel - Umbruch in Verkehr und Mobilität Neue Technologien und Kommunikationssysteme führen zu Vernetzung Intelligente Verkehrssysteme
Der digitale Verkehr Wege in die Zukunft Andreas Krüger www.bmvi.de Digitale Wandel - Umbruch in Verkehr und Mobilität Neue Technologien und Kommunikationssysteme führen zu Vernetzung Intelligente Verkehrssysteme
FAHRERLOSE TRANSPORTSYSTEME. Intralogistik Mobile Robotik
 FAHRERLOSE TRANSPORTSYSTEME Intralogistik Mobile Robotik 2 Grenzebach schließt die Automatisierungslücke Das Familienunternehmen Grenzebach ist seit Generationen ein verlässlicher, innovativer Anbieter
FAHRERLOSE TRANSPORTSYSTEME Intralogistik Mobile Robotik 2 Grenzebach schließt die Automatisierungslücke Das Familienunternehmen Grenzebach ist seit Generationen ein verlässlicher, innovativer Anbieter
Fütter mich! Wenn die Maschine selbst um Nachschub bittet.
 Dirk Pensky Festo Didactic GmbH & Co. KG Agenda Festo Facts Szenario Adaptive Produktion Aktuelle Forschungs- und Entwicklungsprojekte Losgröße 1 wirtschaflich produzieren Festo Facts Festo Corporation
Dirk Pensky Festo Didactic GmbH & Co. KG Agenda Festo Facts Szenario Adaptive Produktion Aktuelle Forschungs- und Entwicklungsprojekte Losgröße 1 wirtschaflich produzieren Festo Facts Festo Corporation
Digitaler Wandel in der Feuerwehr Trends & Handlungsempfehlungen für die Freiwillige Feuerwehr
 Trends & Handlungsempfehlungen für die Freiwillige Feuerwehr Dr. Olaf Grebner, 17.11.2018 Trends & Handlungsempfehlungen für die FF Kurzfassung Kurzfassung Dieses Handout enthält eine Kurzfassung des gehaltenen
Trends & Handlungsempfehlungen für die Freiwillige Feuerwehr Dr. Olaf Grebner, 17.11.2018 Trends & Handlungsempfehlungen für die FF Kurzfassung Kurzfassung Dieses Handout enthält eine Kurzfassung des gehaltenen
Förderprogramm Photonik Forschung Deutschland
 Seite 1 / Nikolas Knake / 25.06.2014 Förderprogramm Photonik Forschung Deutschland Wege zur staatlichen Förderung Photonik Forschung Deutschland Short Course : Basiswissen Laser und Lasermaterialbearbeitung
Seite 1 / Nikolas Knake / 25.06.2014 Förderprogramm Photonik Forschung Deutschland Wege zur staatlichen Förderung Photonik Forschung Deutschland Short Course : Basiswissen Laser und Lasermaterialbearbeitung
SozA Soziale und organisatorische Auswirkungen zunehmender Automatisierung im österreichischen Güterverkehrssystem
 Mobilität der Zukunft Themenfeld Gütermobilität Jürgen Zajicek, AIT Austrian Institute of Technology GmbH Soziale und organisatorische Auswirkungen zunehmender Automatisierung im österreichischen Güterverkehrssystem
Mobilität der Zukunft Themenfeld Gütermobilität Jürgen Zajicek, AIT Austrian Institute of Technology GmbH Soziale und organisatorische Auswirkungen zunehmender Automatisierung im österreichischen Güterverkehrssystem
Technologie für automatisiertes Fahren nutzergerecht optimiert. Projektvorstellung
 Technologie für automatisiertes Fahren nutzergerecht optimiert Projektvorstellung BMWi-BMBF-Fachtagung Automatisiertes und vernetztes Fahren Dr. Britta Michel, MAN Truck & Bus AG Technologie für automatisiertes
Technologie für automatisiertes Fahren nutzergerecht optimiert Projektvorstellung BMWi-BMBF-Fachtagung Automatisiertes und vernetztes Fahren Dr. Britta Michel, MAN Truck & Bus AG Technologie für automatisiertes
Heterogene Multirobotersysteme zur Aufklärung in unbekanntem Gelände
 Heterogene Multirobotersysteme zur Aufklärung in unbekanntem Gelände Zur Erlangung des akademischen Grades eines Doktor-Ingenieurs von der Fakultät für Elektrotechnik und Informationstechnik des Karlsruher
Heterogene Multirobotersysteme zur Aufklärung in unbekanntem Gelände Zur Erlangung des akademischen Grades eines Doktor-Ingenieurs von der Fakultät für Elektrotechnik und Informationstechnik des Karlsruher