Entwicklung eines Telepräsenz-Roboters im Rahmen des Projekts LüttIng
|
|
|
- Samuel Straub
- vor 6 Jahren
- Abrufe
Transkript

1



2 Willkommen! Entwicklung eines Telepräsenz-Roboters im Rahmen des Projekts LüttIng Konzept Methodik Planung Analyse Versuch Prototypen Entwicklung Montage Produkt Das Team Ziele methodisch erreichen! Anne-Frank Schule Bargteheide LüttING Projekt Abschlusspräsentation
3 Unser Projekt Testung Testung eines professionellen Roboters im Schulalltag Entwicklung Programmierung und Aufbau eines Models Ergebnis Funktionstüchtiger Telepräsenzroboter aus Eigenenentwicklung Anne-Frank Schule Bargteheide LüttING Projekt Abschlusspräsentation



4 Unsere Partner Anne-Frank Schule Bargteheide LüttING Projekt Abschlusspräsentation





5 Projekt Struktur Anne-Frank Schule Bargteheide LüttING Projekt Abschlusspräsentation
6 Inhalt Projekt-Management Double 2 Modelle Fahrgestell Höhenverstellung Programmierung Garage Anne-Frank Schule Bargteheide LüttING Projekt Abschlusspräsentation



7 Zusammenfassung Projekt Inhalte Aufgaben / Ziele Vorgehensweise Ergebnisse Ziel ist die Entwicklung eines Tele-Präsenz-Roboters im Rahmen der LüttIng Initiative. Gängige Methoden der Industrie. Organisation in Teilprojekten Anforderung -> Analyse Lösung erarbeiten Der Telepräsenzroboter Prototypen (Modelle) Einzel- / Team- Methoden Ziele methodisch erreichen! Höhenverstellung Programmierung Server Modelle Double 2 Garage Fahrgestell Anne-Frank Schule Bargteheide LüttING Projekt Abschlusspräsentation
8 Zusammenfassung Projekt Status Projekt Ziele Status Entwicklung eines Tele-Präsenz-Roboters im Rahmen der LüttIng Initiative. Methodik / Konzept / Vorgehensweise Entwicklung im Rahmen der Teilprojekte Zeit Inhalt OK OK Teileprojekte Reifegrad Bewertung Server Double 2 90% 90% Was lief gut? Wir hatten Spaß und haben in verschiedenen Themenbereichen etwas gelernt. Was lief nicht so gut? Gemeinsame Treffen, wo jeder Zeit hat. Modelle 80% Fahrgestell Höhen-verstellung 60% 70% Was können wir verbessern? Internetanbindung im Technikraum Was müssen wir vermeiden?? Programmierung 60% Garage 80% Anne-Frank Schule Bargteheide LüttING Projekt Abschlusspräsentation




9 Testung des Double 2 Praktisch sinnvoll? In den Großteil der Schulgebäude kommt der Roboter gut hin. Er kann statt Treppen über Rampen nach oben oder unten gelangen. Steuerung Ist schnell und einfach zu verstehen. Der Roboter reagiert zwar mit leichten Verzögerungen, aber trotzdem gut auf die einzelnen Befehle Psychologisch sinnvoll? Der Roboter erweckt Aufsehen. Es herrschen Bedenken, dass jemand den Roboter im Unterricht beschädigen könnte. Aufbau Der Roboter ist von Grundaufbaubau gut für die Schule geeignet. Dem Roboter fehlt nur die Meldefunktion. Der Roboter ist standfest Anne-Frank Schule Bargteheide LüttING Projekt Abschlusspräsentation




10 Robotermodelle


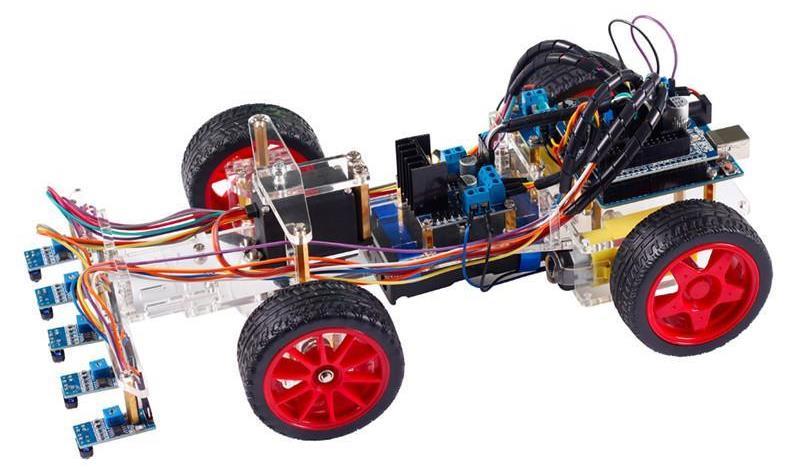
11 Fahrgestell Anne-Frank Schule Bargteheide LüttING Projekt Abschlusspräsentation



12 Aufbau Drehbewegung Vertikale Bewegung vom Schrittmotor wird per Riemen an eine Stange übertragen Stange ist mit Kunststoffteil in Flanschlager befestigt Schrittmotor für Höhenverstellung sitzt auf Flanschlager Höhenverstellung Gewindestange wird vom Schrittmotor angetrieben Schrittmotor Gewindestange läuft zwischen zwei Stahlstangen Gewindestange ist mit Mutter an Monitorplatte befestigt und sorgt für horizontale Bewegung Höhenverstellung Drehteil Schrittmotor Gewindeböcke und Mutter Drehbewegung
13 Bewertung Höhenverstellung Was lief gut Schriftliche Arbeit des Projekts lief gut Gruppenarbeit hat einwandfrei funktioniert Kommunikation zwischen den Gruppen war gut Alle waren hilfsbereit Was könnten wir verbessern Gleichgewicht zwischen technischer und schriftlicher Arbeit Was lief nicht so gut Zeitige Umsetzung der technischen Planung Lange Lieferzeiten der Materialien Welche Risiken sehen wir? Die technische Arbeit am Roboter nicht fertig zu stellen Durch zu schnelle Bewegung des Schrittmotors könnte Kameraausrichtung schwer werden Q4/ 16 Q1 / 17 Q2 / 17 Q3 / 17 Q4 / 17 Gruppenbildung Planung Höhenverstellung und Drehbewegung fertig Bauteile angekommen Einbauten der meisten Bauteilen fertig
 Server Server für Datenbank und weitere Komponenten Kommunikation zwischen Roboter (Client) und Datenbank Web-Interface Bentutzeroberfläche zur Steuerung Roboter Das Endgerät, bzw.")
14 Das Gesamtsystem besteht aus 4 Komponenten Datenbank Speicherung aller Informationen für die Steuerung Information zum Status (Ladung, Position, etc.) Server Server für Datenbank und weitere Komponenten Kommunikation zwischen Roboter (Client) und Datenbank Web-Interface Bentutzeroberfläche zur Steuerung Roboter Das Endgerät, bzw. der Client Konzept Anne-Frank Schule Bargteheide LüttING Projekt Abschlusspräsentation
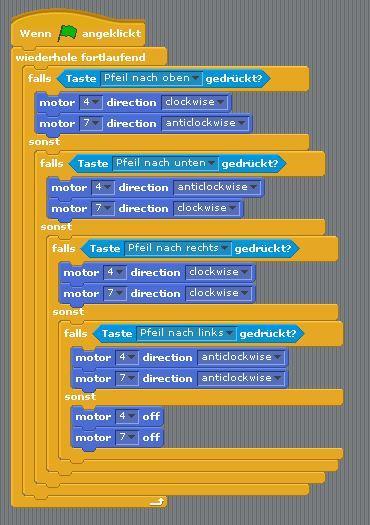
15 JS = JavaScript Aufbau Kamera BS = BashScript Motor Roboter JS Webinterface PS = PythonScript Raspberry Arduino BS PS DB = Datenbank DB Motortreiber Server PS Anne-Frank Schule Bargteheide LüttING Projekt Abschlusspräsentation
16 Garage Lüftungssystem Display Energietechnik Dokumentation & Design Anne-Frank Schule Bargteheide LüttING Projekt Abschlusspräsentation

17 Material: MDF 19mm Stärke Maße: 2Meter x 1Meter x 1Meter Lüfter: Sunon PC Lüfter 12V Display: I2C LCD Display RTC Modul: Real Time Clock Energietechnik: 12V Netzteil inkl. Step-up-Wandler zu 14.5V Technische Daten der Garage Anne-Frank Schule Bargteheide LüttING Projekt Abschlusspräsentation
18 Vielen Dank für Ihre Aufmerksamkeit Haben Sie Fragen? Besuchen Sie unseren Stand! Anne-Frank Schule Bargteheide LüttING Projekt Abschlusspräsentation
Mess- und Regelungstechnik
 Mess- und Regelungstechnik Professor: Dr. Löffler Mang Semester: WS 00/01 Inhaltsverzeichnis 1. Thema 2. Das Mind- Storm- System 2.1 Der RCX 2.2 Die Sensoren 2.2.1 Der Tastsensor 2.2.2 Der Lichtsensor
Mess- und Regelungstechnik Professor: Dr. Löffler Mang Semester: WS 00/01 Inhaltsverzeichnis 1. Thema 2. Das Mind- Storm- System 2.1 Der RCX 2.2 Die Sensoren 2.2.1 Der Tastsensor 2.2.2 Der Lichtsensor
VIRTUAL REALITY HYPE! Virtual Reality ist Super-Cool! Virtual Reality is Super-Cool! Virtual Bungee Jumping
 VIRTUAL REALITY Lebenseinstellung des Vortragenden Institut für Maschinelles Sehen und Darstellen Technische Universität Graz ist Super-Cool! Terminator 4 - der Film aus dem Cyberspace! [SKIP] Mit dem
VIRTUAL REALITY Lebenseinstellung des Vortragenden Institut für Maschinelles Sehen und Darstellen Technische Universität Graz ist Super-Cool! Terminator 4 - der Film aus dem Cyberspace! [SKIP] Mit dem
Embedded Linux gnublin Board Programmieren Sonstiges. Embedded Linux am Beispiel des Gnublin-Boards
 Embedded Linux am Beispiel des Gnublin-Boards Was ist Embedded Linux? Wikipedia Als Embedded Linux bezeichnet man ein eingebettetes System mit einem auf dem Linux-Kernel basierenden Betriebssystem. In
Embedded Linux am Beispiel des Gnublin-Boards Was ist Embedded Linux? Wikipedia Als Embedded Linux bezeichnet man ein eingebettetes System mit einem auf dem Linux-Kernel basierenden Betriebssystem. In
Fakultät für Technik Bereich Elektrotechnik/Informationstechnik
 Fakultät für Technik Bereich Elektrotechnik/Informationstechnik Projektarbeit Sommersemester 2015 Betreuer: Prof. Dr. Karlheinz Blankenbach von Timo Bralic, Michael Knab, Mathias Mayer Entwicklung und
Fakultät für Technik Bereich Elektrotechnik/Informationstechnik Projektarbeit Sommersemester 2015 Betreuer: Prof. Dr. Karlheinz Blankenbach von Timo Bralic, Michael Knab, Mathias Mayer Entwicklung und
Präzise Metall- und Kunststoff bearbeitung vom Profi
 Präzise Metall- und Kunststoff bearbeitung vom Profi DELTA.tec Ihr Rundum-Partner für Metall- und Kunststoffbearbeitung Ob Einzelfertigung oder Serienfertigung, filigrane Metall- Bauteile oder große Werkstücke
Präzise Metall- und Kunststoff bearbeitung vom Profi DELTA.tec Ihr Rundum-Partner für Metall- und Kunststoffbearbeitung Ob Einzelfertigung oder Serienfertigung, filigrane Metall- Bauteile oder große Werkstücke
Projekt Brennstoffzelle. Bericht/Protokoll/Vorhaben
 Bericht/Protokoll/Vorhaben Gemeinschaftsschule Harksheide Fadens Tannen 30 22844 Norderstedt Janosch, Laura, Daniel, Tim (7. Klasse) Lehrer: Dr. Gordon Dzemski Kontakt: dzemski@uni-flensburg.de Vorhaben
Bericht/Protokoll/Vorhaben Gemeinschaftsschule Harksheide Fadens Tannen 30 22844 Norderstedt Janosch, Laura, Daniel, Tim (7. Klasse) Lehrer: Dr. Gordon Dzemski Kontakt: dzemski@uni-flensburg.de Vorhaben
Innovative Stahllösungen. für die Windkraftbranche
 Innovative Stahllösungen für die Windkraftbranche DE So machen wir Stahllösungen Wir sind spezialisiert auf die Bearbeitung und Formgebung von Stahl - von Design, Konstruktion, Fertigung bis zu Qualitätsmanagement
Innovative Stahllösungen für die Windkraftbranche DE So machen wir Stahllösungen Wir sind spezialisiert auf die Bearbeitung und Formgebung von Stahl - von Design, Konstruktion, Fertigung bis zu Qualitätsmanagement
WI-05 Projekt Mobile Agenten Protokoll
 Zeit: - 13.03.2007-14.03.2007 - Martin Schaldach,Lei Zhu - Roboter zusammen bauren - erst Tests durchfueren Vorgehensweise: - BrixCC installieren - Linierkennung programmieren - Lichtsensoren programmieren
Zeit: - 13.03.2007-14.03.2007 - Martin Schaldach,Lei Zhu - Roboter zusammen bauren - erst Tests durchfueren Vorgehensweise: - BrixCC installieren - Linierkennung programmieren - Lichtsensoren programmieren
HERZLICH WILLKOMMEN. STEP WiSe'16. WLAN und VPN
 HERZLICH WILLKOMMEN STEP WiSe'16 WLAN und VPN Seite 1 Jens Wambsganß IT-Services TH Mittelhessen its@thm.de Seite 2 WLAN Seite 3 Bild-Quelle: http://randommization.com/2013/10/17/home-is-where-your-wifi-connects-automatically/
HERZLICH WILLKOMMEN STEP WiSe'16 WLAN und VPN Seite 1 Jens Wambsganß IT-Services TH Mittelhessen its@thm.de Seite 2 WLAN Seite 3 Bild-Quelle: http://randommization.com/2013/10/17/home-is-where-your-wifi-connects-automatically/
Raspberry Pi. Einführung Pi and More 5 Nico Maas
 Raspberry Pi Einführung Pi and More 5 Nico Maas Zur Person Nico Maas IT Systemelektroniker (RZ UNI SB) Praktische Informatik (HTW SB) mail@nico-maas.de www.nico-maas.de @nmaas87 29.05.2014 Nico Maas /
Raspberry Pi Einführung Pi and More 5 Nico Maas Zur Person Nico Maas IT Systemelektroniker (RZ UNI SB) Praktische Informatik (HTW SB) mail@nico-maas.de www.nico-maas.de @nmaas87 29.05.2014 Nico Maas /
IST-Edelstahl-Anlagenbau AG. Verfahrenstechnischer Anlagenbau Apparatebau Tankbau Rohrleitungsbau Airport Systems in Edelstahl
 IST-Edelstahl-Anlagenbau AG Verfahrenstechnischer Anlagenbau Apparatebau Tankbau Rohrleitungsbau Airport Systems in Edelstahl Seit 1975 baut IST verfahrenstechnische Anlagen, Apparate und Rohrleitungssysteme
IST-Edelstahl-Anlagenbau AG Verfahrenstechnischer Anlagenbau Apparatebau Tankbau Rohrleitungsbau Airport Systems in Edelstahl Seit 1975 baut IST verfahrenstechnische Anlagen, Apparate und Rohrleitungssysteme
Raspberry Pi. Einführung Pi and More 6 Nico Maas
 Raspberry Pi Einführung Pi and More 6 Nico Maas Zur Person Nico Maas IT Systemelektroniker (RZ UNI SB) Bachelor of Science (HTW SB) mail@nico-maas.de www.nico-maas.de @nmaas87 28.01.2015 Nico Maas / www.nico-maas.de
Raspberry Pi Einführung Pi and More 6 Nico Maas Zur Person Nico Maas IT Systemelektroniker (RZ UNI SB) Bachelor of Science (HTW SB) mail@nico-maas.de www.nico-maas.de @nmaas87 28.01.2015 Nico Maas / www.nico-maas.de
Basisanforderungen: EVA-Prinzips. Erweiterte Anforderungen: wirtschaftlichen und privaten Alltag.
 Basisanforderungen: 1. Erstelle eine einfache Motor-Steuerung (siehe Anforderungen) 2. Erläutere den Begriff Steuerung. 3. Benenne die Sensoren und Aktoren dieser Steuerung. 4. Beschreibe die Informationsverarbeitung
Basisanforderungen: 1. Erstelle eine einfache Motor-Steuerung (siehe Anforderungen) 2. Erläutere den Begriff Steuerung. 3. Benenne die Sensoren und Aktoren dieser Steuerung. 4. Beschreibe die Informationsverarbeitung
NwT = Naturwissenschaft und Technik
 NwT NwT = Naturwissenschaft und Technik Übersicht Grundlegende Informationen Welche Themen werden in NwT behandelt? Überblick über mögliche Module Beispiele aus dem Unterricht Gründe für die Wahl von NwT
NwT NwT = Naturwissenschaft und Technik Übersicht Grundlegende Informationen Welche Themen werden in NwT behandelt? Überblick über mögliche Module Beispiele aus dem Unterricht Gründe für die Wahl von NwT
Data Logging Device Server Anwendungen
 Data Logging Device Server Anwendungen Ob Sensoren, Maschinen, Barcode oder RFID Lesegeräte, Waagen oder Anlagen aller Art mit unserer Familie konfigurierbarer Datenlogger bieten wir innovative Lösungen,
Data Logging Device Server Anwendungen Ob Sensoren, Maschinen, Barcode oder RFID Lesegeräte, Waagen oder Anlagen aller Art mit unserer Familie konfigurierbarer Datenlogger bieten wir innovative Lösungen,
Bedienungsanleitung PHOTOROBOT
 Bedienungsanleitung PHOTOROBOT Photo Robot ist ein einfacher, kleiner, nur 900g schwerer, aber sehr tragfähiger Panoramakopf. Er ist motorisiert und ermöglicht den schnellen und unkomplizierten Einstieg
Bedienungsanleitung PHOTOROBOT Photo Robot ist ein einfacher, kleiner, nur 900g schwerer, aber sehr tragfähiger Panoramakopf. Er ist motorisiert und ermöglicht den schnellen und unkomplizierten Einstieg
H2 1862 mm. H1 1861 mm
 1747 mm 4157 mm H2 1862 mm H1 1861 mm L1 4418 mm L2 4818 mm H2 2280-2389 mm H1 1922-2020 mm L1 4972 mm L2 5339 mm H3 2670-2789 mm H2 2477-2550 mm L2 5531 mm L3 5981 mm L4 6704 mm H1 2176-2219 mm L1 5205
1747 mm 4157 mm H2 1862 mm H1 1861 mm L1 4418 mm L2 4818 mm H2 2280-2389 mm H1 1922-2020 mm L1 4972 mm L2 5339 mm H3 2670-2789 mm H2 2477-2550 mm L2 5531 mm L3 5981 mm L4 6704 mm H1 2176-2219 mm L1 5205
Step by Step Remotedesktopfreigabe unter Windows Server 2003. von Christian Bartl
 Step by Step Remotedesktopfreigabe unter Windows Server 2003 von Remotedesktopfreigabe unter Windows Server 2003 Um die Remotedesktopfreigabe zu nutzen muss diese am Server aktiviert werden. Außerdem ist
Step by Step Remotedesktopfreigabe unter Windows Server 2003 von Remotedesktopfreigabe unter Windows Server 2003 Um die Remotedesktopfreigabe zu nutzen muss diese am Server aktiviert werden. Außerdem ist
PROJEKT: TISCHTENNIS-ROBOTER
 PROJEKT: TISCHTENNIS-ROBOTER ARTEMI MIHAJLUK, DENNIS GEIL & STEPHAN GÄRTNER Schule: BBS1 Mainz Schulform: Fachschule für Automatisierungstechnik Klasse: FSA PD13 und FSA PZ13 Lernmodul: 15 - Projektarbeit
PROJEKT: TISCHTENNIS-ROBOTER ARTEMI MIHAJLUK, DENNIS GEIL & STEPHAN GÄRTNER Schule: BBS1 Mainz Schulform: Fachschule für Automatisierungstechnik Klasse: FSA PD13 und FSA PZ13 Lernmodul: 15 - Projektarbeit
STÄRKE DURCH KNOW-HOW
 STÄRKE DURCH KNOW-HOW Eigene Konstruktion Kompetenz bei der Materialauswahl Präzise Fertigung Einzelteile, Ersatzteile, Kleinserien Komplette Baugruppen T ECHNISCHE B ER AT UNG UND HER S T EL L UNG VON
STÄRKE DURCH KNOW-HOW Eigene Konstruktion Kompetenz bei der Materialauswahl Präzise Fertigung Einzelteile, Ersatzteile, Kleinserien Komplette Baugruppen T ECHNISCHE B ER AT UNG UND HER S T EL L UNG VON
BASIC-Tiger Starter Kit. Tel: +49 (241) Fax: +49 (241)
 Fax: +49 (241)") BASIC-Tiger Starter Kit Tel: +49 (241) 918 900 Fax: +49 (241) 918 9044 Email: info@wilke.de 1 2 Wilke Technology GmbH Krefelder Str. 147 52070 Aachen Germany BASIC-Tiger Starter Kit Willkommen beim BASIC-Tiger
BASIC-Tiger Starter Kit Tel: +49 (241) 918 900 Fax: +49 (241) 918 9044 Email: info@wilke.de 1 2 Wilke Technology GmbH Krefelder Str. 147 52070 Aachen Germany BASIC-Tiger Starter Kit Willkommen beim BASIC-Tiger
am THG Naturwissenschaft und Technik NwT
 Naturwissenschaft und Technik NwT Naturwissenschaftliche Vertiefung durch NwT Fächer Naturwissenschaften ohne NwT Biologie, Chemie, Geographie, Physik Naturwissenschaften mit NwT Biologie, Chemie, Geographie,
Naturwissenschaft und Technik NwT Naturwissenschaftliche Vertiefung durch NwT Fächer Naturwissenschaften ohne NwT Biologie, Chemie, Geographie, Physik Naturwissenschaften mit NwT Biologie, Chemie, Geographie,
Umbau eines Saug- und Wisch Roboters auf ARDUINO Steuerung
 Saug-Wisch-Roboter Umbau eines Saug- und Wisch Roboters auf ARDUINO Steuerung TOPAN AVC 701 (702) Seite 1 Saug-Wisch-Roboter Elektronik M Saug Motor Radmotor Links FB 433 M Elektronik Arduino Nano DC-
Saug-Wisch-Roboter Umbau eines Saug- und Wisch Roboters auf ARDUINO Steuerung TOPAN AVC 701 (702) Seite 1 Saug-Wisch-Roboter Elektronik M Saug Motor Radmotor Links FB 433 M Elektronik Arduino Nano DC-
Ein Fahrzeug mit Raupenantrieb
 1 Inventor-Bot: Ein Fahrzeug mit Raupenantrieb Ein einfaches Fahrzeug zu bauen, ist der beste Weg, um sich mit einem neuen NXT-2.0-Kasten anzufreunden. Solche Modelle lassen sich nicht nur einfach bauen,
1 Inventor-Bot: Ein Fahrzeug mit Raupenantrieb Ein einfaches Fahrzeug zu bauen, ist der beste Weg, um sich mit einem neuen NXT-2.0-Kasten anzufreunden. Solche Modelle lassen sich nicht nur einfach bauen,
Infos zu IP-Symcon. von Thomas Reger (Tom3244)
") Infos zu IP-Symcon von Thomas Reger (Tom3244) Was ist IP-Symcon? IP-Symcon ist eine Software, welche verbindet was nicht zusammengehört IP-Symcon ist ein leistungsstarkes Entwicklungswerkzeug IP-Symcon
Infos zu IP-Symcon von Thomas Reger (Tom3244) Was ist IP-Symcon? IP-Symcon ist eine Software, welche verbindet was nicht zusammengehört IP-Symcon ist ein leistungsstarkes Entwicklungswerkzeug IP-Symcon
Linux Terminal mit Ethernet und Java. Eine dynamische Plattform für Automatisierungsapplikationen?
 Linux Terminal mit Ethernet und Java. Eine dynamische Plattform für Automatisierungsapplikationen? JULIA SCHILLING SSV EMBEDDED SYSTEMS HEISTERBERGALLEE 72 D-30453 HANNOVER WWW.SSV-EMBEDDED.DE Ethernet
Linux Terminal mit Ethernet und Java. Eine dynamische Plattform für Automatisierungsapplikationen? JULIA SCHILLING SSV EMBEDDED SYSTEMS HEISTERBERGALLEE 72 D-30453 HANNOVER WWW.SSV-EMBEDDED.DE Ethernet
Technische Dokumentation MDK DC Motion Control V1.0
 Technische Dokumentation MDK DC Motion Control V1.0 David Wemhöner 19. Juli 2014 1 1 Funktionsübersicht MDK DC Motion Control ist eine Arduino basierende Steuerung für Gleichstrommotoren und Kamera für
Technische Dokumentation MDK DC Motion Control V1.0 David Wemhöner 19. Juli 2014 1 1 Funktionsübersicht MDK DC Motion Control ist eine Arduino basierende Steuerung für Gleichstrommotoren und Kamera für
Raspberry Pi. Einführung Pi and More 8 Nico Maas
 Raspberry Pi Einführung Pi and More 8 Nico Maas Zur Person Nico Maas IT Systemelektroniker Bachelor of Science mail@nico-maas.de www.nico-maas.de @nmaas87 14.01.2016 Nico Maas / www.nico-maas.de / mail@nico-maas.de
Raspberry Pi Einführung Pi and More 8 Nico Maas Zur Person Nico Maas IT Systemelektroniker Bachelor of Science mail@nico-maas.de www.nico-maas.de @nmaas87 14.01.2016 Nico Maas / www.nico-maas.de / mail@nico-maas.de
JUFOTech. wko.at/tirol/jufotech DATENBLATT. Jugend forscht in der Technik. Titel der Projektarbeit: Fachgebiet:
 Datenblatt (dient als Titelblatt für die Projektarbeit) Seite 1/2 JUFOTech Jugend forscht in der Technik wko.at/tirol/jufotech DATENBLATT Wir nehmen am Wettbewerb Jugend forscht in der Technik Auf den
Datenblatt (dient als Titelblatt für die Projektarbeit) Seite 1/2 JUFOTech Jugend forscht in der Technik wko.at/tirol/jufotech DATENBLATT Wir nehmen am Wettbewerb Jugend forscht in der Technik Auf den
Übersicht. Stewart Plattform. Präsentation des Robotik-Praktikums. Hendrik Burgdörfer Fabian Rühle
 Übersicht Stewart Plattform Präsentation des Robotik-Praktikums Hendrik Burgdörfer Fabian Rühle Interdisziplinäres Zentrum für wissenschaftliches Rechnen Ruprecht - Karls Universität Heidelberg 07. Mai
Übersicht Stewart Plattform Präsentation des Robotik-Praktikums Hendrik Burgdörfer Fabian Rühle Interdisziplinäres Zentrum für wissenschaftliches Rechnen Ruprecht - Karls Universität Heidelberg 07. Mai
STERNBURG BINGO STERNBURG BINGO UND SO FUNKTIONIERT S: MITMACHEN UND TOLLE PREISE GEWINNEN! RAUM FÜR EIGENE BEMERKUNGEN, GRÜSSE ETC.
 85 61 19 27 78 52 90 45 03 39 54 88 89 76 21 69 15 94 22 10 24 18 62 79 53 Aufschrift befindet sich eine neue -Zahl. Wenn Sie eine -Zahl aus dem obigen Sobald Sie eine Reihe von 5 - -Zahlen horizontal,
85 61 19 27 78 52 90 45 03 39 54 88 89 76 21 69 15 94 22 10 24 18 62 79 53 Aufschrift befindet sich eine neue -Zahl. Wenn Sie eine -Zahl aus dem obigen Sobald Sie eine Reihe von 5 - -Zahlen horizontal,
Prüfen Sie, ob Sie über Administratorrechte (Server und Client) verfügen.
 verfügen.") DATENBANKÜBERNAHME Hinweis: Gerne bietet Ihnen moveit Software die Durchführung einer Datenbankübernahme (inkl. Neuinstallation) zu einem günstigen Pauschalpreis an. Die rasche und professionelle Durchführung
DATENBANKÜBERNAHME Hinweis: Gerne bietet Ihnen moveit Software die Durchführung einer Datenbankübernahme (inkl. Neuinstallation) zu einem günstigen Pauschalpreis an. Die rasche und professionelle Durchführung
Abschlusspräsentation
 Abschlusspräsentation Adam Ivankay, Thomas Riethorst, Tobias Eden, Lorenz Kenndoff Autoren: Adam Ivankay, Thomas Riethorst Zielsetzung - Konstruktion einer autonom flugfähigen Gondel - kein Zugriff auf
Abschlusspräsentation Adam Ivankay, Thomas Riethorst, Tobias Eden, Lorenz Kenndoff Autoren: Adam Ivankay, Thomas Riethorst Zielsetzung - Konstruktion einer autonom flugfähigen Gondel - kein Zugriff auf
Universalverfahrachsen
 Universalverfahrachsen solutions by F.EE Elektrotech Engineering Automation Robotik Informatik + Systeme Solar- und Energietechnik F.EE GmbH In der Seugn 10 u. 20 www.fee.de 11 / 2011 2 Inhaltsverzeichnis
Universalverfahrachsen solutions by F.EE Elektrotech Engineering Automation Robotik Informatik + Systeme Solar- und Energietechnik F.EE GmbH In der Seugn 10 u. 20 www.fee.de 11 / 2011 2 Inhaltsverzeichnis
Herzlich Willkommen!
 Herzlich Willkommen! CAD-Daten mal anders!? Der Weg zu innovativen 3D- Darstellungen SEITE 1 Agenda 1 Begrüßung und Vorstellung 2 Das Thema: Innovative 3D-Darstellungen 3 Ein wichtiger Erfolgsfaktor: Drehbuch,
Herzlich Willkommen! CAD-Daten mal anders!? Der Weg zu innovativen 3D- Darstellungen SEITE 1 Agenda 1 Begrüßung und Vorstellung 2 Das Thema: Innovative 3D-Darstellungen 3 Ein wichtiger Erfolgsfaktor: Drehbuch,
UHD. INDOOR Display Ultra Hochauflösend
 UHD INDOOR Display Ultra Hochauflösend Indoorscreen Videodisplays ohne Größenbeschränkung Sonderangebote, Werbevideos oder Infotainment: LED-Displays haben in die Welt der modernen Shopping-Center, Foyers
UHD INDOOR Display Ultra Hochauflösend Indoorscreen Videodisplays ohne Größenbeschränkung Sonderangebote, Werbevideos oder Infotainment: LED-Displays haben in die Welt der modernen Shopping-Center, Foyers
11/2009 Bernhard Gangl. Steuerungen mit OOP entwickeln 11 / 2009 1. Themenübersicht. Übersicht und Begriffsklärung: Objektorientierte Programmierung
 Reduzierung der Engineeringzeiten und kosten durch objektorientierte Steuerungsprogrammierung 11/2009 Bernhard Gangl www.sigmatek-automation.com Steuerungen mit OOP entwickeln 11 / 2009 1 Themenübersicht
Reduzierung der Engineeringzeiten und kosten durch objektorientierte Steuerungsprogrammierung 11/2009 Bernhard Gangl www.sigmatek-automation.com Steuerungen mit OOP entwickeln 11 / 2009 1 Themenübersicht
Technische Lösungen und Konzepte Fernwartung kinderleicht mit u-link Referent Carsten Wendt 28.10.2015
 Technische Lösungen und Konzepte Fernwartung kinderleicht mit u-link Referent Carsten Wendt 28.10.2015 Agenda Vorstellung Weidmüller & Referent Industrie 4.0 und Ausblick Fernwartung mit u-link 27.10.2015
Technische Lösungen und Konzepte Fernwartung kinderleicht mit u-link Referent Carsten Wendt 28.10.2015 Agenda Vorstellung Weidmüller & Referent Industrie 4.0 und Ausblick Fernwartung mit u-link 27.10.2015
Gestiegene Anforderungen an Logistikdienstleister Transferkongress DSLV, 30. 9. 2004, Köln
 Gestiegene Anforderungen an Logistikdienstleister Transferkongress DSLV, 30. 9. 2004, Köln Universität Regensburg, Lehrstuhl für Betriebswirtschaftslehre, insb. Controlling und Logistik, Prof. Dr. A. Otto
Gestiegene Anforderungen an Logistikdienstleister Transferkongress DSLV, 30. 9. 2004, Köln Universität Regensburg, Lehrstuhl für Betriebswirtschaftslehre, insb. Controlling und Logistik, Prof. Dr. A. Otto
Zug-Toilettenkabine und System. Toilette mit Dusche
 Zug-Toilettenkabine und System Toilette mit Dusche Produktbeschreibung Zug Toiletten-Module sind Stand-der-Technik - Lösungen, die an den Kunden als bereit zur-installation - Module geliefert werden. Alle
Zug-Toilettenkabine und System Toilette mit Dusche Produktbeschreibung Zug Toiletten-Module sind Stand-der-Technik - Lösungen, die an den Kunden als bereit zur-installation - Module geliefert werden. Alle
Asynchrone interaktive Gruppenübungen
 Asynchrone interaktive Gruppenübungen - Workshop Authoring-on-the-Fly und Teleteaching - Hans Christian Liebig Universität Mannheim Trier, 25. November 2002 Hans Christian Liebig Universität Mannheim 1
Asynchrone interaktive Gruppenübungen - Workshop Authoring-on-the-Fly und Teleteaching - Hans Christian Liebig Universität Mannheim Trier, 25. November 2002 Hans Christian Liebig Universität Mannheim 1
Fortbildungsmodule >> Elektrotechnik. Präzisierung zu Modulbereich Mikrocontroller [E61] Teilmodul E611 Grundlagen Mikrocontrollertechnik (µc)
![Fortbildungsmodule >> Elektrotechnik. Präzisierung zu Modulbereich Mikrocontroller [E61] Teilmodul E611 Grundlagen Mikrocontrollertechnik (µc)](/thumbs/55/36092411.jpg "Fortbildungsmodule >> Elektrotechnik. Präzisierung zu Modulbereich Mikrocontroller [E61] Teilmodul E611 Grundlagen Mikrocontrollertechnik (µc)") B A D E N - W Ü R T T E M B E R G R E G I E R U N G S P R Ä S I D I E N Freiburg // Karlsruhe // Stuttgart // Tübingen Abt. 7 Schule und Bildung Fortbildungsmodule >> Elektrotechnik Präzisierung zu Modulbereich
B A D E N - W Ü R T T E M B E R G R E G I E R U N G S P R Ä S I D I E N Freiburg // Karlsruhe // Stuttgart // Tübingen Abt. 7 Schule und Bildung Fortbildungsmodule >> Elektrotechnik Präzisierung zu Modulbereich
Der Weg zum Intranet Ein Projektbeispiel.
 Der Weg zum Intranet Ein Projektbeispiel. Rudolf Landolt lic.oec.publ. Unternehmensberatung Phone +41 1 741 70 11 Mobile +41 79 237 70 63 rudolf.landolt@landolt.net Folien-1 Inhaltsverzeichnis Die Entwicklung
Der Weg zum Intranet Ein Projektbeispiel. Rudolf Landolt lic.oec.publ. Unternehmensberatung Phone +41 1 741 70 11 Mobile +41 79 237 70 63 rudolf.landolt@landolt.net Folien-1 Inhaltsverzeichnis Die Entwicklung
GLACIORISK Monitoring von Naturgefahren mit low-cost GNSS- Sensoren
 GLACIORISK Monitoring von Naturgefahren mit low-cost GNSS- Sensoren Chr. Hagin und M. Blasco (Geosat SA) J. Brahier (sigeom sa) U. Wild (swisstopo) CH-1950 Sion www.geosat.ch 26/27. November 2015 AHORN
GLACIORISK Monitoring von Naturgefahren mit low-cost GNSS- Sensoren Chr. Hagin und M. Blasco (Geosat SA) J. Brahier (sigeom sa) U. Wild (swisstopo) CH-1950 Sion www.geosat.ch 26/27. November 2015 AHORN
VERSIS VERSIS 220/75. Klappbarer Monitor. visulutionary. [ˈvɪʒuˈlu:ʒəneri] ADJ:
![VERSIS VERSIS 220/75. Klappbarer Monitor. visulutionary. [ˈvɪʒuˈlu:ʒəneri] ADJ:](/thumbs/53/32409841.jpg "VERSIS VERSIS 220/75. Klappbarer Monitor. visulutionary. [ˈvɪʒuˈlu:ʒəneri] ADJ:") VERSIS visulutionary [ˈvɪʒuˈlu:ʒəneri] ADJ: Beschreibt das Gefühl und den Eindruck, den man bekommt, wenn man einzigartige integrierte Monitor-Lösungen von ELEMENT ONE benutzt. komfortabler 21, Zoll Monitor
VERSIS visulutionary [ˈvɪʒuˈlu:ʒəneri] ADJ: Beschreibt das Gefühl und den Eindruck, den man bekommt, wenn man einzigartige integrierte Monitor-Lösungen von ELEMENT ONE benutzt. komfortabler 21, Zoll Monitor
Virtualisierter Terminalserver
 Virtualisierter Terminalserver 1. Virtualisierung Virtualisierung bezeichnet in der Informatik laut Wikipedia die Nachbildung eines Hard- oder Software- Objekts durch ein ähnliches Objekt vom selben Typ
Virtualisierter Terminalserver 1. Virtualisierung Virtualisierung bezeichnet in der Informatik laut Wikipedia die Nachbildung eines Hard- oder Software- Objekts durch ein ähnliches Objekt vom selben Typ
Integration eines pneumatischen Roboters in die Robotics API
 Integration eines pneumatischen Roboters in die Robotics API Ziel: Integration eines AirArms in die Robotics API und Umsetzung eines Demo-Anwendung Idee: Die MRK (Mensch Roboter Kooperation) bekommt zunehmend
Integration eines pneumatischen Roboters in die Robotics API Ziel: Integration eines AirArms in die Robotics API und Umsetzung eines Demo-Anwendung Idee: Die MRK (Mensch Roboter Kooperation) bekommt zunehmend
6. SAXSIM Studentenwettbewerb: 1. Platz. Entwicklung, Konstruktion und Simulation. eines Heckspoilermechanismus
 Thema: Entwicklung, Konstruktion und Simulation 6. SAXSIM Studentenwettbewerb 01. April 2014 Technische Universität Chemnitz ausgerichtet durch: Professur Montageund Handhabungstechnik Sponsoren: PTC,
Thema: Entwicklung, Konstruktion und Simulation 6. SAXSIM Studentenwettbewerb 01. April 2014 Technische Universität Chemnitz ausgerichtet durch: Professur Montageund Handhabungstechnik Sponsoren: PTC,
Schrittmotor ansteuern mithilfe des RaspberryPi und dem L293D
 Schrittmotor ansteuern mithilfe des RaspberryPi und dem L293D Inhalt Einleitung Einsatzgebiete Aufbau verschiedener Schrittmotoren Motortreiber L293D Ansteuerung über WiringPi Praktikum 2 3..5 Einleitung
Schrittmotor ansteuern mithilfe des RaspberryPi und dem L293D Inhalt Einleitung Einsatzgebiete Aufbau verschiedener Schrittmotoren Motortreiber L293D Ansteuerung über WiringPi Praktikum 2 3..5 Einleitung
Realisierung eines thermoelektrischen Generators für die Stromerzeugung aus Niedertemperatur
 Eidgenössisches Departement für Umwelt, Verkehr, Energie und Kommunikation UVEK Bundesamt für Energie BFE Jahresbericht 3. Dezember 2009 Realisierung eines thermoelektrischen Generators für die Stromerzeugung
Eidgenössisches Departement für Umwelt, Verkehr, Energie und Kommunikation UVEK Bundesamt für Energie BFE Jahresbericht 3. Dezember 2009 Realisierung eines thermoelektrischen Generators für die Stromerzeugung
Trainingssysteme für die Robotik. Mit den Schulungsrobotern auf leichte und verständliche Weise komplexe Themen der Robotik vermitteln
 Trainingssysteme für die Robotik Mit den Schulungsrobotern auf leichte und verständliche Weise komplexe Themen der Robotik vermitteln Automatisierungstechnik Trainingssysteme für die Robotik Der Start
Trainingssysteme für die Robotik Mit den Schulungsrobotern auf leichte und verständliche Weise komplexe Themen der Robotik vermitteln Automatisierungstechnik Trainingssysteme für die Robotik Der Start
www.vicoweb.com Leitsystem für Industrie- und Gebäudeautomation Wir visualisieren jedes Gerät! Automatisieren - Visualisieren - Sonderlösungen
 www.vicoweb.com Leitsystem für Industrie- und Gebäudeautomation Wir visualisieren jedes Gerät! Kral Automatisieren - Visualisieren - Sonderlösungen Wo auch immer Sie sich befinden... 2 www.vicoweb.com
www.vicoweb.com Leitsystem für Industrie- und Gebäudeautomation Wir visualisieren jedes Gerät! Kral Automatisieren - Visualisieren - Sonderlösungen Wo auch immer Sie sich befinden... 2 www.vicoweb.com
Spaghettitürme. Luisa baut einen Turm aus Spaghetti und Marshmallows. Das ist nicht so einfach, denn Spaghetti sind sehr dünn und brechen leicht.
 Spaghettitürme Luisa baut einen Turm aus Spaghetti und Marshmallows. Das ist nicht so einfach, denn Spaghetti sind sehr dünn und brechen leicht. Versuche, auch einen Turm aus Spaghetti und Marshmallows
Spaghettitürme Luisa baut einen Turm aus Spaghetti und Marshmallows. Das ist nicht so einfach, denn Spaghetti sind sehr dünn und brechen leicht. Versuche, auch einen Turm aus Spaghetti und Marshmallows
nformance Online Marketing Agentur
 nformance Online Marketing Agentur Ihr Partner Informance Media - Wir unterstützen Agenturen und Unternehmen aus der Medienbranche professionell, zuverlässig und kosteneffizient bei der Umsetzung von Projekten.
nformance Online Marketing Agentur Ihr Partner Informance Media - Wir unterstützen Agenturen und Unternehmen aus der Medienbranche professionell, zuverlässig und kosteneffizient bei der Umsetzung von Projekten.
1. Einleitung: Baut mal was mit Schrittmotoren! Was n Schrittmotor? Bibolare Motoren Unipolare Motoren 3
 jan.sporbeck@gmx.net Inhalt 1. Einleitung: Baut mal was mit Schrittmotoren! 1 2. Was n Schrittmotor? 1 2.1 Bibolare Motoren 2 2.2 Unipolare Motoren 3 3. Ansteuerung von Schrittmotoren durch einen Computer:
jan.sporbeck@gmx.net Inhalt 1. Einleitung: Baut mal was mit Schrittmotoren! 1 2. Was n Schrittmotor? 1 2.1 Bibolare Motoren 2 2.2 Unipolare Motoren 3 3. Ansteuerung von Schrittmotoren durch einen Computer:
Konzept eines Datenbankprototypen. 30.06.2003 Folie 1 Daniel Gander / Gerhard Schrotter
 Konzept eines Datenbankprototypen 30.06.2003 Folie 1 Daniel Gander / Gerhard Schrotter Inhalt (1) Projektvorstellung & Projektzeitplan Softwarekomponenten Detailierte Beschreibung der System Bausteine
Konzept eines Datenbankprototypen 30.06.2003 Folie 1 Daniel Gander / Gerhard Schrotter Inhalt (1) Projektvorstellung & Projektzeitplan Softwarekomponenten Detailierte Beschreibung der System Bausteine
Werkzeug und Maschinenbau
 Werkzeug und Maschinenbau 3 2 Metallbearbeitung innovativ, flexibel und kompetent Seit über 40 Jahren sind wir, die Rautenberg GmbH, systeme stehen für einen schnellen Informationsfluss ein kompetenter
Werkzeug und Maschinenbau 3 2 Metallbearbeitung innovativ, flexibel und kompetent Seit über 40 Jahren sind wir, die Rautenberg GmbH, systeme stehen für einen schnellen Informationsfluss ein kompetenter
Zug-Toiletten-System. Std Toilette
 Zug-Toiletten-System Std Toilette Produktbeschreibung Zug Toiletten-Module sind Stand-der-Technik - Lösungen, die an den Kunden als bereit zur-installation - Module geliefert werden. Alle notwendigen Montagearbeiten
Zug-Toiletten-System Std Toilette Produktbeschreibung Zug Toiletten-Module sind Stand-der-Technik - Lösungen, die an den Kunden als bereit zur-installation - Module geliefert werden. Alle notwendigen Montagearbeiten
Handbuch RS 232 <> 20mA Schnittstellenwandler
 Handbuch RS 232 20mA Schnittstellenwandler W&T Typ 84001 84003, 84004 Release 1.2 Irrtum und Änderung vorbehalten 1 10/2006 by Wiesemann & Theis GmbH Irrtum und Änderung vorbehalten: Da wir Fehler machen
Handbuch RS 232 20mA Schnittstellenwandler W&T Typ 84001 84003, 84004 Release 1.2 Irrtum und Änderung vorbehalten 1 10/2006 by Wiesemann & Theis GmbH Irrtum und Änderung vorbehalten: Da wir Fehler machen
Archivierung in DBMS
 Archivierung in DBMS Marcus Brisgen 9. März 2004 Gliederung Gliederung Motivation Archivierung Grundlagen Anwendungsorientiertes Archivieren Architekturen Erweiterungen ASQL XML-Archivierungsoperator Beispiele
Archivierung in DBMS Marcus Brisgen 9. März 2004 Gliederung Gliederung Motivation Archivierung Grundlagen Anwendungsorientiertes Archivieren Architekturen Erweiterungen ASQL XML-Archivierungsoperator Beispiele
OWASP Stammtisch München Sep 2014 XSS und andere Sicherheitslücken aus der Perspektive des Programmcodes
 OWASP Stammtisch München Sep 2014 XSS und andere Sicherheitslücken aus der Perspektive des Programmcodes 1 XSS: Cross-Site Scripting 1.) Es gelangen Daten in den Web-Browser, die Steuerungsinformationen
OWASP Stammtisch München Sep 2014 XSS und andere Sicherheitslücken aus der Perspektive des Programmcodes 1 XSS: Cross-Site Scripting 1.) Es gelangen Daten in den Web-Browser, die Steuerungsinformationen
Arduino-Messsysteme und ihre Anwendung im Physikunterricht. Wasja Kleider
 Arduino-Messsysteme und ihre Anwendung im Physikunterricht Wasja Kleider 21.11.2015 Gliederung Motivation Was sind Arduino und ProfiLab? Beispiele für Sensoren und Messungen Experimente Nachbau einer Messbox
Arduino-Messsysteme und ihre Anwendung im Physikunterricht Wasja Kleider 21.11.2015 Gliederung Motivation Was sind Arduino und ProfiLab? Beispiele für Sensoren und Messungen Experimente Nachbau einer Messbox
Existierende Systeme II: Generierende Ansätze. Jens Siebert PG-WaVis - Universität Paderborn
 PG-WaVis - Universität Paderborn Motivation 1. Warum überhaupt Web-Anwendungen generieren? 2. Wie generiert man Web-Anwendungen? 3. Welche Systeme existieren bereits? 2 Generierung von Web-Anwendungen
PG-WaVis - Universität Paderborn Motivation 1. Warum überhaupt Web-Anwendungen generieren? 2. Wie generiert man Web-Anwendungen? 3. Welche Systeme existieren bereits? 2 Generierung von Web-Anwendungen
IWL LOGISTIKTAGE 2012
 > WONDERWARE < IWL LOGISTIKTAGE 2012 Uwe Drücker Drücker Steuerungssysteme GmbH Reinhard Blinzler Invensys Systems GmbH Software 2010 Invensys. All Rights Reserved. The names, logos, and taglines identifying
> WONDERWARE < IWL LOGISTIKTAGE 2012 Uwe Drücker Drücker Steuerungssysteme GmbH Reinhard Blinzler Invensys Systems GmbH Software 2010 Invensys. All Rights Reserved. The names, logos, and taglines identifying
3D Drucker. Möglichkeiten und Grenzen im Einsatz bei der Modellbahn. 11. November 2014 Rainer Lüssi
 3D Drucker Möglichkeiten und Grenzen im Einsatz bei der Modellbahn 11. November 2014 Rainer Lüssi Geschichte Der 3D-Druck wurde 1983 erfunden. Durch Patente lange Zeit geschützt. Unterschiedliche Systeme
3D Drucker Möglichkeiten und Grenzen im Einsatz bei der Modellbahn 11. November 2014 Rainer Lüssi Geschichte Der 3D-Druck wurde 1983 erfunden. Durch Patente lange Zeit geschützt. Unterschiedliche Systeme
I-Fly Wireless Broadband Router
 with 4 Fast Ethernet ports + 1 Wan port Kurze Anleitung A02-WR-54G/G4 (November 2003)V1.00 Dieses Handbuch ist als eine Schnellenleitung gedacht worden, deshalb nehmen Sie auf das weite Handbuch, das in
with 4 Fast Ethernet ports + 1 Wan port Kurze Anleitung A02-WR-54G/G4 (November 2003)V1.00 Dieses Handbuch ist als eine Schnellenleitung gedacht worden, deshalb nehmen Sie auf das weite Handbuch, das in
Network Video Tuner NVT-1212. Datenblatt
 Network Video Tuner NVT-1212 Datenblatt Seite 2/5 NVT-1212 Network Video Tuner Der jusst NVT-1212 integriert RTSP/UDP Streaming für kleine Netzwerke in einem vollständig via Netzwerk steuerbaren DVB Tuner.
Network Video Tuner NVT-1212 Datenblatt Seite 2/5 NVT-1212 Network Video Tuner Der jusst NVT-1212 integriert RTSP/UDP Streaming für kleine Netzwerke in einem vollständig via Netzwerk steuerbaren DVB Tuner.
Continuous Delivery in der Realität eines Großunternehmens
 Continuous Delivery in der Realität eines Großunternehmens Agile World, 28. Juni 2013 Christian Weber 01 Continuous Delivery Das Versprechen Das Versprechen Sch Entspanntes Release Time To Market 3 02
Continuous Delivery in der Realität eines Großunternehmens Agile World, 28. Juni 2013 Christian Weber 01 Continuous Delivery Das Versprechen Das Versprechen Sch Entspanntes Release Time To Market 3 02
Bedienungsanleitung für 3 Achsen TB6560 Steuerkarte und Win PCNC Adapter.
 Bedienungsanleitung für 3 Achsen TB6560 Steuerkarte und Win PCNC Adapter. Einstellung von Win PCNC Maschinen Software. Konfiguration in Win PCNC. 1. Öffnen Sie Win PCNC Software ohne die Steuerung zu Starten.
Bedienungsanleitung für 3 Achsen TB6560 Steuerkarte und Win PCNC Adapter. Einstellung von Win PCNC Maschinen Software. Konfiguration in Win PCNC. 1. Öffnen Sie Win PCNC Software ohne die Steuerung zu Starten.
POB-Technology Dokumentation. POB-Technology Produkte. Deutsche Übersetzung von roboter-teile.de Alle Rechte vorbehalten Seite 1 von 13
 POB-Technology Produkte Deutsche Übersetzung von roboter-teile.de Alle Rechte vorbehalten Seite 1 von 13 Inhaltsverzeichnis Inhaltsverzeichnis Inhaltsverzeichnis... 2 Einführung...4 POB-EYE... 5 POB-LCD128...
POB-Technology Produkte Deutsche Übersetzung von roboter-teile.de Alle Rechte vorbehalten Seite 1 von 13 Inhaltsverzeichnis Inhaltsverzeichnis Inhaltsverzeichnis... 2 Einführung...4 POB-EYE... 5 POB-LCD128...
» Technologien, Trends, Visionen Architekturen für mobile Anwendungen
 » Technologien, Trends, Visionen Architekturen für mobile Anwendungen Juri Urbainczyk Forum A:gon meets Technology 08. September 2011 Agenda» Status und Entwicklung des mobilen Marktes» Besonderheiten
» Technologien, Trends, Visionen Architekturen für mobile Anwendungen Juri Urbainczyk Forum A:gon meets Technology 08. September 2011 Agenda» Status und Entwicklung des mobilen Marktes» Besonderheiten
Zertifizierungsprogramm Robotics
 Zertifizierungsprogramm Robotics Investieren Sie in Ihre Zukunft. Setzen Sie auf Wissen und Bildung. Ein Schlüssel zum Erfolg ist die passende Ausbildung Ihrer Mitarbeiter. Die YASKAWA academy bietet Ihnen
Zertifizierungsprogramm Robotics Investieren Sie in Ihre Zukunft. Setzen Sie auf Wissen und Bildung. Ein Schlüssel zum Erfolg ist die passende Ausbildung Ihrer Mitarbeiter. Die YASKAWA academy bietet Ihnen
Bau eines mobilen, personengesteuerten Roboter
 Technische Universität Berlin Wintersemester 2013/14 PROJEKTDOKUMENTATION im Projektlabor Robotik MINTgrün Bau eines mobilen, personengesteuerten Roboter Projektleiter: Verfasser: Felix Bonowski Charlotte
Technische Universität Berlin Wintersemester 2013/14 PROJEKTDOKUMENTATION im Projektlabor Robotik MINTgrün Bau eines mobilen, personengesteuerten Roboter Projektleiter: Verfasser: Felix Bonowski Charlotte
CFD Simulation. www.dr-breier-consulting.de info@dr-breier-consulting.de
 CFD Simulation www.dr-breier-consulting.de info@dr-breier-consulting.de Beratung Thermisches Management Beurteilung und Erarbeitung von Kühlkonzepten Unterstützung bei der Beurteilung vorhandener Simulationsergebnisse
CFD Simulation www.dr-breier-consulting.de info@dr-breier-consulting.de Beratung Thermisches Management Beurteilung und Erarbeitung von Kühlkonzepten Unterstützung bei der Beurteilung vorhandener Simulationsergebnisse
Innovative Seehafentechnologien ISETEC II. Schallbekämpfung Schallminderung für Seehafenumschlaganlagen
 Innovative Seehafentechnologien ISETEC II Schallbekämpfung Schallminderung für Seehafenumschlaganlagen Agenda Ziel des Forschungs- und Entwicklungsvorhabens Projektstruktur Arbeitspaket 1 Wissensmanagement
Innovative Seehafentechnologien ISETEC II Schallbekämpfung Schallminderung für Seehafenumschlaganlagen Agenda Ziel des Forschungs- und Entwicklungsvorhabens Projektstruktur Arbeitspaket 1 Wissensmanagement
BüBaWü. Aufgabe 5: Projektdurchführung und Projektcontrolling. Projektleiterin: Eva Reinl. Professionelles Projektmanagement - SS06 - Gruppe 8
 Aufgabe 5: Projektdurchführung und Projektcontrolling Projektleiterin: Eva Reinl Professionelles Projektmanagement - SS06 - Gruppe 8 Würzburg, 22.06.2006 Eva Reinl Seite 1 PSP und Basisplan Aktueller Umsetzungsstand
Aufgabe 5: Projektdurchführung und Projektcontrolling Projektleiterin: Eva Reinl Professionelles Projektmanagement - SS06 - Gruppe 8 Würzburg, 22.06.2006 Eva Reinl Seite 1 PSP und Basisplan Aktueller Umsetzungsstand
Objektorientierte Analyse (OOA) OOA-Pattern
 OOA-Pattern") OOA-Muster (Architektur Pattern) Ein Pattern (Entwurfsmuster) ist ein Problem mit seiner Lösung in einem Kontext. Der Kontext enthält in der Regel Zielkonflikte, die der Designer lösen muss, z.b. Performance
OOA-Muster (Architektur Pattern) Ein Pattern (Entwurfsmuster) ist ein Problem mit seiner Lösung in einem Kontext. Der Kontext enthält in der Regel Zielkonflikte, die der Designer lösen muss, z.b. Performance
Business Applika-onen schnell entwickeln JVx Framework - Live!
 Business Applika-onen schnell entwickeln JVx Framework - Live! - Enterprise Applica-on Framework h&p://www.sibvisions.com/jvx JVx ermöglicht in kürzester Zeit mit wenig Source Code hoch performante professionelle
Business Applika-onen schnell entwickeln JVx Framework - Live! - Enterprise Applica-on Framework h&p://www.sibvisions.com/jvx JVx ermöglicht in kürzester Zeit mit wenig Source Code hoch performante professionelle
Agiles Design. Dr.-Ing. Uwe Doetzkies Gesellschaft für Informatik mail: gi@uwe.doetzkies.de
 Agiles Design Dr.-Ing. Uwe Doetzkies Dr.-Ing. Uwe Doetzkies Gesellschaft für Informatik mail: gi@uwe.doetzkies.de startupcamp berlin 15.3.2013 Regionalgruppe Berlin/Brandenburg Arbeitskreis Freiberufler
Agiles Design Dr.-Ing. Uwe Doetzkies Dr.-Ing. Uwe Doetzkies Gesellschaft für Informatik mail: gi@uwe.doetzkies.de startupcamp berlin 15.3.2013 Regionalgruppe Berlin/Brandenburg Arbeitskreis Freiberufler
Verbundprojekt MIKADO Mechatronik-Kooperationsplattform für anforderungsgesteuerte Prüfung und Diagnose - ein Überblick. Dr.
 Verbundprojekt MIKADO Mechatronik-Kooperationsplattform für anforderungsgesteuerte Prüfung und Diagnose - ein Überblick Dr. Haygazun Hayka Fraunhofer-Institut für Produktionsanlagen und Konstruktionstechnik
Verbundprojekt MIKADO Mechatronik-Kooperationsplattform für anforderungsgesteuerte Prüfung und Diagnose - ein Überblick Dr. Haygazun Hayka Fraunhofer-Institut für Produktionsanlagen und Konstruktionstechnik
Projektarbeit zu Der Kleine Albert Franziskanergymnasium Hall SJ 2011/12 SOLAR GO - KART
 Fachgebiet: Umwelttechnik / Energie Thema der Arbeit: Inhaltsverzeichnis: SOLAR GO - KART 1. Einleitung. Seite 1 2. Methoden..Seite 2 3. Durchführung... Seite 2 4. Arbeitsschritte zum Solargokart Seite
Fachgebiet: Umwelttechnik / Energie Thema der Arbeit: Inhaltsverzeichnis: SOLAR GO - KART 1. Einleitung. Seite 1 2. Methoden..Seite 2 3. Durchführung... Seite 2 4. Arbeitsschritte zum Solargokart Seite
Gesättigte Automobilmärkte und Individualisierung 2. Systematischer Produktaufbau für Fahrzeugfamilien 2
 Inhaltsverzeichnis Kurzfassung Abstract Danksagung Vorwort Inhaltsverzeichnis Abkürzungsverzeichnis Allgemeine Abkürzungen Fahrzeugspezifische Abkürzungen I Ill V VII IX XVII XVII XVII Formelzeichen 1
Inhaltsverzeichnis Kurzfassung Abstract Danksagung Vorwort Inhaltsverzeichnis Abkürzungsverzeichnis Allgemeine Abkürzungen Fahrzeugspezifische Abkürzungen I Ill V VII IX XVII XVII XVII Formelzeichen 1
owncloud Sync Meine Daten gehören mir! Dr. Markus Tauber, AIT, ICB www.icb.at www.ait.ac.at/ict-security www.markus.tauber.co.at markus@tauber.co.
 owncloud Sync Meine Daten gehören mir! Dr. Markus Tauber, AIT, ICB www.icb.at www.ait.ac.at/ict-security www.markus.tauber.co.at markus@tauber.co.at Übersicht Warum alternative cloud Dienste wählen? Was
owncloud Sync Meine Daten gehören mir! Dr. Markus Tauber, AIT, ICB www.icb.at www.ait.ac.at/ict-security www.markus.tauber.co.at markus@tauber.co.at Übersicht Warum alternative cloud Dienste wählen? Was
Schrittmotor Parallel Port Interface Platine
 Schrittmotor Parallel Port Interface Platine Soft- und Hardware Langenfeld, Stiftstr. 3, 86866 Mickhausen Tel.: 082041281, Fax: 082041675 E-Mail: Langenfeld@pro-tos.de Homepage: http://www.pro-tos.de Eingang
Schrittmotor Parallel Port Interface Platine Soft- und Hardware Langenfeld, Stiftstr. 3, 86866 Mickhausen Tel.: 082041281, Fax: 082041675 E-Mail: Langenfeld@pro-tos.de Homepage: http://www.pro-tos.de Eingang
LEGO-Mindstorms-Roboter im Informatikunterricht 1 - mit Java-
 Eckart Modrow LEGO-Mindstorms-Roboter S. 1 LEGO-Mindstorms-Roboter im Informatikunterricht 1 - mit Java- Benutzung in einer Programmierumgebung Für die LEGO-Roboter stehen unter allen gängigen Betriebssystemen
Eckart Modrow LEGO-Mindstorms-Roboter S. 1 LEGO-Mindstorms-Roboter im Informatikunterricht 1 - mit Java- Benutzung in einer Programmierumgebung Für die LEGO-Roboter stehen unter allen gängigen Betriebssystemen
signotec Pad Sigma LCD Signature Tablet mit oder ohne Hintergrundbeleuchtung Beschreibung und Datenblatt Beschreibung und Datenblatt
 signotec Pad Sigma LCD Signature Tablet mit oder ohne Hintergrundbeleuchtung Beschreibung und Datenblatt Beschreibung und Datenblatt Version: 3.8 Datum: 2015-01-06 HIGHLIGHTS Das LCD ist mit oder ohne
signotec Pad Sigma LCD Signature Tablet mit oder ohne Hintergrundbeleuchtung Beschreibung und Datenblatt Beschreibung und Datenblatt Version: 3.8 Datum: 2015-01-06 HIGHLIGHTS Das LCD ist mit oder ohne
NACHWUCHSFÖRDERUNG EIN BEITRAG ZUR MINT-INITIATIVE. SCHÜLERINNEN UND SCHÜLER FÜR TECHNIK BEGEISTERN: IM HSRlab. Das Schülerlabor.
 NACHWUCHSFÖRDERUNG EIN BEITRAG ZUR MINT-INITIATIVE SCHÜLERINNEN UND SCHÜLER FÜR TECHNIK BEGEISTERN: IM HSRlab Das Schülerlabor. Rollentausch: Von der Schulbank zum Arbeitsplatz in einem Unternehmen Auf
NACHWUCHSFÖRDERUNG EIN BEITRAG ZUR MINT-INITIATIVE SCHÜLERINNEN UND SCHÜLER FÜR TECHNIK BEGEISTERN: IM HSRlab Das Schülerlabor. Rollentausch: Von der Schulbank zum Arbeitsplatz in einem Unternehmen Auf
AC T I C O N access & time control Softw ar e : W e b s oftw are
 AC T I C O N access & time control Softw ar e : W e b s oftw are Eigenschaften Bequeme Erfassung von Arbeitszeiten und Fehltagen, Beantragung und Genehmigung von Fehlzeiten, Ausdruck von Journalen mit
AC T I C O N access & time control Softw ar e : W e b s oftw are Eigenschaften Bequeme Erfassung von Arbeitszeiten und Fehltagen, Beantragung und Genehmigung von Fehlzeiten, Ausdruck von Journalen mit
Simbuwa Simple business warehouse
 Platz 1: 5.000 Simbuwa Simple business warehouse Eine mächtige APEX-Anwendung für Fertigungs- und Montagebetriebe. Aktuell verfügbar ist das Kernmodul Sachstammpflege (Teile + Gruppen). Weitere Module
Platz 1: 5.000 Simbuwa Simple business warehouse Eine mächtige APEX-Anwendung für Fertigungs- und Montagebetriebe. Aktuell verfügbar ist das Kernmodul Sachstammpflege (Teile + Gruppen). Weitere Module
StarterKit Embedded Control SC13 + DK51. From the electronic to the automation
 SC13 + DK51 From the electronic to the automation 21.10.2005 No. 1 /14 Entwicklungssystem für Embedded Controller Applikationsspezifische Komponenten ergänzen. Ethernet-Anbindungen seriellen Schnittstellen
SC13 + DK51 From the electronic to the automation 21.10.2005 No. 1 /14 Entwicklungssystem für Embedded Controller Applikationsspezifische Komponenten ergänzen. Ethernet-Anbindungen seriellen Schnittstellen
ALOHA Art.-Nr DOTS Art.-Nr SWEETY Art.-Nr EYE EVIL. W as is t de in Lo ok? HERBIE SKULL. So vielfältig, so Du.
 So vielfältig, so Du. Mit dem hipsten aller Tachos zeigst du auf dem Bike, wer du bist. Schnapp dir deinen Favoriten aus der stylishen Vielfalt und sei von jetzt an ganz individuell mit Spaß beim Biken
So vielfältig, so Du. Mit dem hipsten aller Tachos zeigst du auf dem Bike, wer du bist. Schnapp dir deinen Favoriten aus der stylishen Vielfalt und sei von jetzt an ganz individuell mit Spaß beim Biken
Raspberry Pi 7 Touch-Display mit PiXtend und CODESYS
 Raspberry Pi 7 Touch-Display mit PiXtend und CODESYS Vor wenigen Tagen hat das offizielle Raspberry Pi Touchscreen Display das Licht der Welt erblickt. Wir konnten uns auch nicht zurückhalten und haben
Raspberry Pi 7 Touch-Display mit PiXtend und CODESYS Vor wenigen Tagen hat das offizielle Raspberry Pi Touchscreen Display das Licht der Welt erblickt. Wir konnten uns auch nicht zurückhalten und haben
Bitwerk Terminkalender Installation Schritt für Schritt
 Bitwerk Terminkalender Installation Schritt für Schritt Schritt 1 - Setup Beginn Bestätigen Sie mit Ja, dass Sie den Terminkalender installieren möchten. Bei Nein wird das Setup abgebrochen. Schritt 2
Bitwerk Terminkalender Installation Schritt für Schritt Schritt 1 - Setup Beginn Bestätigen Sie mit Ja, dass Sie den Terminkalender installieren möchten. Bei Nein wird das Setup abgebrochen. Schritt 2
Herzlich willkommen im Modul Web-Engineering
 Herbst 2014 Herzlich willkommen im Modul Web-Engineering Wirtschaftsinformatik: 5. Semester Dozenten: Rainer Telesko / Martin Hüsler Fachhochschule Nordwestschweiz FHNW / Martin Hüsler und Rainer Telesko
Herbst 2014 Herzlich willkommen im Modul Web-Engineering Wirtschaftsinformatik: 5. Semester Dozenten: Rainer Telesko / Martin Hüsler Fachhochschule Nordwestschweiz FHNW / Martin Hüsler und Rainer Telesko
Inhalt 1. Einleitung: Kontrollverlust durch Social Media? Unternehmenskommunikation als wirtschaftliches Handeln 21
 Inhalt Vorwort 11 1. Einleitung: Kontrollverlust durch Social Media? 15 1.1 Forschungsinteresse: Social Media und Anpassungen des Kommunikationsmanagements 16 1.2 Vorgehensweise der Untersuchung 18 2.
Inhalt Vorwort 11 1. Einleitung: Kontrollverlust durch Social Media? 15 1.1 Forschungsinteresse: Social Media und Anpassungen des Kommunikationsmanagements 16 1.2 Vorgehensweise der Untersuchung 18 2.
KiRo - Tischfußball gegen den Roboter
 KiRo - Tischfußball gegen den Roboter Universität Ulm Fakultät für Informatik Proseminar Künstliche Intelligenz - KiRo - Tischfußball gegen den Roboter Referat am 17.07.2006 von Thomas Schnattinger Proseminar
KiRo - Tischfußball gegen den Roboter Universität Ulm Fakultät für Informatik Proseminar Künstliche Intelligenz - KiRo - Tischfußball gegen den Roboter Referat am 17.07.2006 von Thomas Schnattinger Proseminar
Entwicklung eines Prototypen für einen mobilen Dienst. Frankfurt, 27.01.05
 Entwicklung eines Prototypen für einen mobilen Dienst Frankfurt, 27.01.05 Agenda Aufgabe Formen des Prototyping Organisatorisches Ablauf- und Strukturdiagramm Vorführung Live-System Details zur Applikation
Entwicklung eines Prototypen für einen mobilen Dienst Frankfurt, 27.01.05 Agenda Aufgabe Formen des Prototyping Organisatorisches Ablauf- und Strukturdiagramm Vorführung Live-System Details zur Applikation
IT-Sicherheit im Bankenumfeld: Ein konzeptioneller Ansatz
 Universität Hildesheim Institut für Betriebswirtschaftslehre und Wirtschaftsinformatik Hannover OE 2152 Endgeräte 02.07.2008 Christian Kröher 1 02.07.2008 Christian Kröher 2 1 Ausgangssituation Unsichere
Universität Hildesheim Institut für Betriebswirtschaftslehre und Wirtschaftsinformatik Hannover OE 2152 Endgeräte 02.07.2008 Christian Kröher 1 02.07.2008 Christian Kröher 2 1 Ausgangssituation Unsichere
Kurzanweisung der Jovision IP Kamera
 Kurzanweisung der Jovision IP Kamera Diese Kurzanleitung soll dem Benutzer die Möglichkeit geben, die IP Kamera im Standard Modus in Betrieb zu nehmen. Die genauen Anweisungen, die Jovision IP Kamera Detail
Kurzanweisung der Jovision IP Kamera Diese Kurzanleitung soll dem Benutzer die Möglichkeit geben, die IP Kamera im Standard Modus in Betrieb zu nehmen. Die genauen Anweisungen, die Jovision IP Kamera Detail
Discovery Tool für COMbricks PROCENTEC
 Die PROFIBUS und PROFINET Spezialisten Discovery Tool für Schnell-Start PROCENTEC Die PROFIBUS und PROFINET Anleitung Spezialisten Copyright 2012 PROCENTEC. All rights reserved Einleitung Das Discovery
Die PROFIBUS und PROFINET Spezialisten Discovery Tool für Schnell-Start PROCENTEC Die PROFIBUS und PROFINET Anleitung Spezialisten Copyright 2012 PROCENTEC. All rights reserved Einleitung Das Discovery