ALEGRO. Aufbau eines lokalen maritimen Ergänzungssystems zur Unterstützung hochpräziser Galileo-Anwendungen und Dienste im Forschungshafen Rostock
|
|
|
- Klemens Biermann
- vor 5 Jahren
- Abrufe
Transkript

1 Aufbau eines lokalen maritimen Ergänzungssystems zur Unterstützung hochpräziser Galileo-Anwendungen und Dienste im Forschungshafen Rostock Technical Note Messkampagne Positionsverfügbarkeit und -Qualität Author: Proved by WP leader: by Project leader: Version: 2.0 Document-ID: Pages: 65 Dr. S. M. Schlüter A. Hirrle TN-MK1-V Positionsverfuegbarkeit_und_Qualitaet.doc Institute of Communications and Navigation
2 -TN-MK1-V02-07-Positionsverfuegbarkeit_und_Qualitaet.doc Version 2.0 Änderungsbericht: Version Datum Seiten Status Gez. APL Gez. PL all Issue 1 (Draft) all First Revision 2
3 -TN-MK1-V02-07-Positionsverfuegbarkeit_und_Qualitaet.doc Version 2.0 Inhalt 1. Einführung Datenbasis Nomenklatur Verwendete Dateien Referenzstation Rover Koordinaten der Referenzstation Vollständigkeit der NMEA-Datensätze Referenzstation Rover Positionsverfügbarkeit Referenzstation Rover Positionsgenauigkeit Genauigkeit der Referenzdaten Zeitlicher Verlauf der Positionsmoden des GRTK Zeitlicher Verlauf der Positionsmoden des GGEG Alter der RTK-Korrekturnachricht und Entfernung zur Referenz Horizontale Positionsgenauigkeit Referenzstation (GBAS) GRTK (Float) GRTK (Fix) GRTK Fix mit zeitnahen Korrekturinformationen GNSS GGEG Raum- und Zeitbezug der Horizontalen Positionsfehler der Roverdaten GRTK GNSS GGEG Positionsgenauigkeit und HDOP Referenzstation (GBAS) Rover GRTK GNSS
4 -TN-MK1-V02-07-Positionsverfuegbarkeit_und_Qualitaet.doc Version GGEG Fehlerwahrscheinlichkeiten Zusammenfassung Anhang
5 -TN-MK1-V02-07-Positionsverfuegbarkeit_und_Qualitaet.doc Version 2.0 Tabellen Tab. 2-1: Zuordnung der Datei-Identifikatoren zu den Empfängertypen und Positionierungsverfahren Tab. 2-2: NMEA-Dateien der GBAS-Referenzstation Tab. 2-3: TTC/POS-Dateien der GBAS-Referenzstation Tab. 2-4: NMEA-Dateien des GNSS-Rover Tab. 2-5: TTC/POS-Dateien des GNSS-Rover Tab. 2-6: NMEA-Dateien des GRTK-Rover Tab. 2-7: TTC/POS-Dateien des GRTK-Rover Tab. 2-8: NMEA-Dateien des GGEG-Rover Tab. 2-9: TTC/POS-Dateien des GGEG-Rover Tab Antennenstandort der Referenzstation (WGS84) Tab. 4-1: NMEA Position Fix Indikator Tab. 4-2: Positionsverfügbarkeit an der Referenzstation Tab. 4-3: Positionsverfügbarkeit am Rover Tab. 4-4: Verfügbarkeit einer Positionslösung im RTK-Fix-Modus unterschieden nach der Entfernung zur Referenzstation Tab. 5-1: Windgeschwindigkeiten der westlichen Ostsee im Messzeitraum
6 -TN-MK1-V02-07-Positionsverfuegbarkeit_und_Qualitaet.doc Version 2.0 Abbildungen Abb. 1-1: Standort der RTK-Referenzstation im Fährhafen Rostock Abb. 4-1: RTK-Positionsverfügbarkeit in Abhängigkeit von der Entfernung zur Referenzstation Abb. 5-1: Streuung der für die Referenzstation ermittelten TTC-Positionen um den Median Abb. 5-2: Streuung der für die Referenzstation ermittelten horizontalen TTC-Positionen um den für alle Tage fixen Referenzwert Abb. 5-3: Positions-Moden des GRTK bei der Messfahrt am Abb. 5-4: Positions-Moden des GRTK bei der Messfahrt am Abb. 5-5: Positions-Moden des GRTK bei der Messfahrt am Abb. 5-6: Positions-Moden des GRTK bei der Messfahrt am Abb. 5-7: Position und Abdeckungsbereich der EGNOS-Satelliten (Quelle: ESA) Abb. 5-8: Positions-Moden des GGEG bei der Messfahrt am Abb. 5-9: Positions-Moden des GGEG bei der Messfahrt am Abb. 5-10: Positions-Moden des GGEG bei der Messfahrt am Abb. 5-11: Positions-Moden des GGEG bei der Messfahrt am Abb. 5-12: Alter (Mittel und STD) der RTK Korrektur am Rover bezogen auf die Entfernung zur Referenzstation Abb. 5-13: Verteilung der Horizontalen Positionsabweichungen des GBAS Abb. 5-14: Abweichung der RTK-Float-Lösungen von der Referenzposition Abb. 5-15: Verteilung der Horizontalen Positionsabweichungen des GRTK (RTK-Fix) Abb. 5-16: Verteilung der Horizontalen Positionsabweichungen des GRTK (RTK-Fix) bei der nur zeitnahe Korrekturinformationen verwendet wurden Abb. 5-17: Verteilung der horizontalen Genauigkeit des GNSS Abb. 5-18: Verteilung der horizontalen Genauigkeit des GGEG Abb. 5-19: Abbildung des horizontalen Positionsfehlers des GRTK auf die Referenzposition Abb. 5-20: Abbildung des horizontalen Positionsfehlers des GNSS auf die Referenzposition Abb. 5-21: Abbildung des horizontalen Positionsfehlers des GGEG auf die Referenzposition Abb. 5-22: HDOP und Horizontaler Positionsfehler des GBAS am Abb. 5-23: HDOP und Horizontaler Positionsfehler des GBAS am Abb. 5-24: HDOP und Horizontaler Positionsfehler des GBAS am Abb. 5-25: HDOP und Horizontaler Positionsfehler des GBAS am Abb. 5-26: HDOP und Horizontaler Positionsfehler des GRTK am Abb. 5-27: HDOP und Horizontaler Positionsfehler des GRTK am Abb. 5-28: HDOP und Horizontaler Positionsfehler des GRTK am Abb. 5-29: HDOP und Horizontaler Positionsfehler des GRTK am Abb. 5-30: HDOP und Horizontaler Positionsfehler des GNSS am Abb. 5-31: HDOP und Horizontaler Positionsfehler des GNSS am Abb. 5-32: HDOP und Horizontaler Positionsfehler des GNSS am Abb. 5-33: HDOP und Horizontaler Positionsfehler des GNSS am Abb. 5-34: HDOP und Horizontaler Positionsfehler des GGEG am Abb. 5-35: HDOP und Horizontaler Positionsfehler des GGEG am
7 -TN-MK1-V02-07-Positionsverfuegbarkeit_und_Qualitaet.doc Version 2.0 Abb. 5-36: HDOP und Horizontaler Positionsfehler des GGEG am Abb. 5-37: HDOP und Horizontaler Positionsfehler des GGEG am Abb. 7-1: Wetterdaten Warnemünde für den (Quelle: 64 Abb. 7-2: Wetterdaten Warnemünde für den (Quelle: 64 Abb. 7-3: Wetterdaten Warnemünde für den (Quelle: 65 Abb. 7-4: Wetterdaten Warnemünde für den (Quelle:
8 -TN-MK1-V02-07-Positionsverfuegbarkeit_und_Qualitaet.doc Version 2.0 Abkürzungen AIS - Shipborne Automatic Identification System ASCII - American Standard Code for Information Interchange DGNSS - Differential GNSS DGPS - Differential GPS EGNOS - European Geostationary Navigation Overlay Service GBAS - Ground Based Augmentation System GLONASS - GLObal NAvigation Satellite System GNSS - Global Navigation Satellite System GRAS - Ground based Regional Augmentation System GPS - Global Positioning System GPST - Global Positioning System Time HDOP - Horizontal Dilution of Position IALA - International Association of Marine Aids to Navigation and Lighthouse Authorities IMO - International Maritime Organisation IOW - Institut für Ostseeforschung Warnemünde NMEA - National Marine Electronics Association RTK - Real Time Kinematik SBAS - Satellite Based Augmentation System SOLAS - International Convention for the Safety of Life at Sea TN - Technical Note 8
9 -TN-MK1-V02-07-Positionsverfuegbarkeit_und_Qualitaet.doc Version 2.0 Referenzen [Ref 1] [Ref 2] [Ref 3] [Ref 4] [Ref 5] [Ref 6] [Ref 7] [Ref 8] [Ref 9] [Ref 10] [Ref 11] [Ref 12] [Ref 13] TN GalileoNav Amplitudenprozessor TN GalileoNav Phasenpreprozessor TN Plausibilitätsprüfung genutzter Quelldateien TN Messaufbau und Messdurchführung TN Bestimmung der Referenzposition und Referenztrajektorien mit Hilfe von TTC TN Rohdatenqualität und Verfügbarkeit Schlüter, S., Bauer, T., and Schuster, W. (2006): Anastasia - Critical analysis of space based navigation technologies usable for civil aviation Gayraud, P., Arethens, J. (2005): Summary of the GIFT Project. Bangkok, Thailand Landtag Mecklenburg-Vorpommern (2004): Bericht über die Wahrnehmung des Beobachterstatus der Ostseeparlamentarierkonferenz (BSPC) bei der Helsinki- Kommission zum Schutz der Meeresumwelt des Ostseegebietes (HELCOM) durch den Landtag. Beschlussempfehlung u. Bericht des Umweltausschusses zu der Unterrichtung durch die Präsidentin des Landtages - Drucksache 4/824 Hofmann-Wellenhof, B., Legat, K., and Wieser, M. (2003): Navigation - Principles of Positioning and Guidance. Springer, Wien, New York IMO (2003): Evaluation of GALILEO Performance against Maritime GNSS Requirements. Sub-Committee on Safty of Navigation, 49th session, Agenda item 13 Wild, U., Grünig, S., Hug, R. und Kummer, P. (2001): SWIPOS - Positionierungsdienste auf der Basis von Differentiellem GPS (DGPS) für Navigation, GIS-Datenerfassung und Vermessung, Bundesamt für Landestopographie, Schweiz Rothacher, M. (2007): Satellitengeodäsie I. (Einführung in GPS), Vorlesungsskriptum Sommersemester Institut für Astronomische und Physikalische Geodäsie, Technische Universität München. Kapitel 12 Seite 158. [Ref 14] ESA (2006): EGNOS The European Geostationary Navigation Overlay System A cornerstone to Galileo, ESA Publications Division, ESTEC, Noordwijk, Netherlands 9
10 -TN-MK1-V02-07-Positionsverfuegbarkeit_und_Qualitaet.doc Version 2.0 -Überblick Der Forschungshafen Rostock ist eine Initiative des Landes Mecklenburg-Vorpommern. Er ist einerseits als Netzwerk der regionalen Industrie sowie von Forschungs- und Entwicklungseinrichtungen des Landes zu verstehen und dient der Vorbereitung der wirtschaftlichen Verwertung von Galileo im maritimen Umfeld. Andererseits ist er die experimentelle Plattform, auf deren Grundlage die Validierung und Demonstration neuer Produkte und Verfahren zur genauen und sicheren Navigation sowohl zu Wasser als auch im Hafenumfeld unter realen Nutzungsbedingungen erfolgt. Das Projekt ist eines der Initialprojekte des Forschungshafens Rostock und ist auf die Entwicklung und Demonstration von Ground Based Augmentation Systems (GBAS) für maritime Safety of Life -Anwendungen ausgerichtet. Diese werden gebraucht, um Anforderungen der International Maritime Organisation an die GNSS-Genauigkeit und Integrität im Hafenbereich zu erfüllen. Das Projekt selbst ist in vier Phasen unterteilt: Phase 1 Durchführung einer Initialmesskampagne zur Gewinnung von Messdaten unter maritimen Empfangsbedingungen und zur Bewertung der erreichbaren Genauigkeit und Verfügbarkeit von GNSS-basierter Ortung beim Einsatz verschiedener GNSS-Standardtechnologien (stand alone, mit EGNOS-Korrekturen, mit differentiellen Korrekturen einer Referenzstation). Phase 2 Aufbau und Inbetriebname der Referenzstation im Forschungshafen Rostock Entwicklung von Algorithmen und Verfahren zur Bewertung von GNSS in Echtzeit (GNSS Performance Assessment Facility) und Implementierung dieser in die Processing Facility der Referenzstation im Hafen Rostock. Phase 3 Weiterentwicklung der RTK-Verfahren durch Nutzung der mit Galileo möglichen multi-carrier Signalprozessierung und Qualifizierung der RTK-Verfahren in Hinblick auf zu erfüllende Integritätsanforderungen Stufenweiser Ausbau der Processing Facility der Referenzstation im Hafen Rostock inklusive Durchführung notwendiger Validierungstests. Phase 4 Experimentelle Validierung der erweiterten RTK-Verfahren durch Vorbereitung und Durchführung von Messkampagnen in Bezug auf spezifische maritime Anwendungen. Der folgende Bericht ordnet sich in Phase 1 ein und ist einer von 5 technischen Berichten, die sich entweder mit der Durchführung oder den Messergebnissen der Initialmesskampagne auseinandersetzen. 10

11 -TN-MK1-V02-07-Positionsverfuegbarkeit_und_Qualitaet.doc Version Einführung Im Zeitraum vom bis zum wurde durch das und im Rahmen des Projektes im Hafengebiet der Stadt Rostock eine GNSS-Messkampagne durchgeführt. Zielstellung der Aktivität war die Gewinnung von GNSS-Daten in einem maritimen Umfeld. In der Messkampagne wurden eine Referenzstation (Base) im Rostocker Fährhafen, sowie drei GNSS/EGNOS-Empfänger (Rover) auf dem Forschungsschiff Prof. Albrecht Penck des Instituts für Ostseeforschung in Warnemünde (IOW) eingesetzt. Abb. 1-1: Standort der RTK-Referenzstation im Fährhafen Rostock Die Konfiguration der Empfänger erfolgte dabei so, dass jeweils unterschiedliche Verfahren zur Positionsbestimmung verwendet wurden: 1. Positionierung mit Code- u. Trägerphasenmessungen von GPS- und GLONASS, 2. Positionierung mit Codephasenmessungen des GPS in Kombination mit EGNOS, sowie 3. RTK-basierte Positionierung unter Einbeziehung einer lokalen Referenzstation im Hafen von Rostock. In diesem Bericht werden die Ergebnisse der Analyse von Positionsverfügbarkeit und -Qualität (Genauigkeit) der oben aufgeführten Empfänger bzw. Positionierungsverfahren zusammengefasst. Zielstellung dieses Berichts und der dahinter liegende Datenanalyse ist u. a. die Beantwortung folgender Fragestellungen: Sind die verwendeten NMEA-Datensätze vollständig oder gibt es Datenlücken, die womöglich synchron auf mehreren Empfängern auftreten? 11
12 -TN-MK1-V02-07-Positionsverfuegbarkeit_und_Qualitaet.doc Version 2.0 Welche Positionierungsgenauigkeit wurde erreicht? Wie äußern sich Änderungen der DOPs in der Positionsgenauigkeit? Gibt es Ausreißer in den Daten und wenn vorhanden, gibt es für die Ausreißer eine Erklärung aus der Qualität der mit TTC prozessierten Daten und/oder aus der Satellitenkonstellation und/oder aus der Rohdatenqualität? Wie verhalten sich die Fehlerbudgets der vier Empfänger des Rovers zueinander? Treten Ausreißer synchronisiert auf? Wie verhalten sich die Fehlerbudgets der vier Empfänger des Rovers zum Fehlerbudget der Referenzstation? Treten Ausreißer synchronisiert auf? Genaue Informationen zum Messaufbau, Spezifizierung der Hard- u. Software und der Messdurchführung finden sich in [Ref 4]. 12
13 -TN-MK1-V02-07-Positionsverfuegbarkeit_und_Qualitaet.doc Version Datenbasis Die Datenbasis für die hier durchgeführten Untersuchungen bilden, die während der Messkampagne vom in der Referenzstation (Messbus) und an Bord des Forschungsschiffes Prof. Albrecht Penck aufgezeichneten NMEA-Dateien, sowie aus den aufgezeichneten RINEX- Dateien durch Nachprozessierung abgeleitete TTC-Dateien. Im Folgenden werden die für diese Analyse verwendeten Daten, Dateien und Nomenklaturen kurz beschrieben. Untersuchungen zur Qualität der für diese Analyse verwendeten Roh- und Referenzdaten finden sich in [Ref 4] und [Ref 5]) Nomenklatur Wie bereits in der Einführung erwähnt wurden in der Messkampagne vier unterschiedliche Verfahren angewendet, um Positionslösungen zu generieren: 1. RTK: Ortung basierend auf Real-Time-Kinematik-Verfahren mit einer lokalen Referenzstation im Fährhafen Rostock; 2. GNS: Carrier-Smoothed GPS Navigation basierend auf der Kombination von Kode- u. Trägersignalen; 3. GEG: Reine Code-basierte GPS-Navigation unterstützt durch Ergänzungsinformationen des EGNOS; 4. TTC: In der Post-Prozessierung mit Trimble Total Control (TTC) Version 2.73 erzeugte Positionsdaten. Um eine Zuordnung der im Projekt generierten Dateien zu den Empfängern, Positionierungsverfahren und Dateitypen (NMEA, TTC) herzustellen, wurde die in Tab. 2-1 dargestellte Nomenklatur genutzt. Tab. 2-1: Zuordnung der Datei-Identifikatoren zu den Empfängertypen und Positionierungsverfahren Empfängername Aufgabe Positionierungsverfahren NMEA/TTC-Identifikator GBAS Referenz GNS/TTC lcbn/gbas GNSS Rover GNS/TTC lcsn/gnss GRTK Rover RTK/TTC lcrn/grtk GGEG Rover GEG/TTC lcen/ggeg 2.2. Verwendete Dateien In den Folgenden Unterabschnitten finden sich Angaben zu den verwendeten Dateien und den Zeiträumen, für die Daten aus der Messkampagne zur Auswertung bereit stehen. 13
14 -TN-MK1-V02-07-Positionsverfuegbarkeit_und_Qualitaet.doc Version GBAS-Referenzstation Tab. 2-2: NMEA-Dateien der GBAS-Referenzstation Datum File Messzeitraum Zeitliche Auflösung/Sek lcbn ##b; ## = 00,, 23 0:00-24:00 UT lcbn ##b; ## = 00,, 23 0:00-24:00 UT lcbn ##b; ## = 00,, 23 0:00-24:00 UT lcbn ##b; ## = 00,, 23 0:00-24:00 UT 1 Tab. 2-3: TTC/POS-Dateien der GBAS-Referenzstation Datum File Messzeitraum Zeitliche Auflösung/Sek GBAS030R.POS 7:05-14:59 UT GBAS031R.POS 7:00-15:00 UT GBAS032R.POS 9:00-15:00 UT GBAS033R.POS 7:41-11:12 UT Rover Tab. 2-4: NMEA-Dateien des GNSS-Rover Datum File Messzeitraum Zeitliche Auflösung/Sek lcsn ##b; ## = 06,, 13 6:00-13:00 UT lcsn ##b; ## = 07,, 13 7:00-13:00 UT lcsn ##b; ## = 06,, 14 6:00-14:00 UT lcsn ##b; ## = 06,, 14 6:00-14:00 UT 1 Tab. 2-5: TTC/POS-Dateien des GNSS-Rover Datum File Messzeitraum Zeitliche Auflösung/Sek GNSS030R.POS 10:00-13:30 UT GNSS031R.POS 7:03-13:31 UT GNSS032R.POS 6:49-14:28 UT GNSS033R.POS 6:50-14:10 UT 1 Tab. 2-6: NMEA-Dateien des GRTK-Rover Datum File Messzeitraum Zeitliche Auflösung/Sek lcrn ##b; ## = 06,, 13 6:00-13:00 UT lcrn ##b; ## = 07,, 13 7:00-13:00 UT lcrn ##b; ## = 06,, 14 6:00-14:00 UT lcrn ##b; ## = 06,, 14 6:00-14:00 UT 1 14
15 -TN-MK1-V02-07-Positionsverfuegbarkeit_und_Qualitaet.doc Version 2.0 Tab. 2-7: TTC/POS-Dateien des GRTK-Rover Datum File Messzeitraum Zeitliche Auflösung/Sek GRTK030R.POS 10: UT GRTK031R.POS 7:04-13:31 UT GRTK032R.POS 6:49-14:28 UT GRTK033R.POS 6:51-14:10 UT 1 Tab. 2-8: NMEA-Dateien des GGEG-Rover Datum File Messzeitraum Zeitliche Auflösung/Sek lcen ##b; ## = 06,, 13 6:00-13:00 UT lcen ##b; ## = 07,, 13 7:00-13:00 UT lcen ##b; ## = 06,, 14 6:00-14:00 UT lcen ##b; ## = 06,, 14 6:00-14:00 UT 1 Tab. 2-9: TTC/POS-Dateien des GGEG-Rover Datum File Messzeitraum Zeitliche Auflösung/Sek GGEG030R.POS 10: UT GGEG031R.POS 7:04-13:31 UT GGEG032R.POS 6:50-14:28 UT GGEG033R.POS 6:51-14:10 UT Koordinaten der Referenzstation Aus den Messdaten des GBAS-Referenzstation im Fährhafen Rostock (s. Abb. 1-1) wurden die folgenden mittleren Koordinaten in der Nachprozessierung bestimmt [Ref 5]: Tab Antennenstandort der Referenzstation (WGS84) Geogr. Breite [ N] Geogr. Länge [ E] Höhe [m] X [m] Y [m] Z [m] Diese Koordinaten wurden in der späteren Analyse verwendet, um den Abstand zwischen Referenzstation und Rover zu bestimmen (s. z. B. Abschn. 0 ) 15
16 -TN-MK1-V02-07-Positionsverfuegbarkeit_und_Qualitaet.doc Version Vollständigkeit der NMEA-Datensätze Detaillierte Untersuchungen zur Vollständigkeit der in der -Messkampagne verwendeten Quelldateien findet sich in [Ref 3]. Die Ergebnisse bzgl. der NMEA-Datensätze aus [Ref 3], die die für diese TN wichtigen Positionsinformationen enthalten, sind in den folgenden Abschnitten lediglich kurz zusammengefasst Referenzstation Die NMEA-Datenverfügbarkeit des GBAS-Empfängers liegt an allen Tagen über 99 %, wobei bei Verfügbarkeit zu 100% eine Positionsbestimmung erfolgt. Datenlücken korrelieren auf den aufeinanderfolgenden Tagen zeitlich nicht und beschränken sich bis auf zwei Ausnahmen auf wenige Sekunden Rover Für die Empfänger GGEG uns GNSS gibt es nur am und punktuelle Ausfälle, die weder zeitlich an aufeinander folgenden Tagen korrelieren noch parallel auf beiden Empfängern auftreten. Im Fall der Datenverfügbarkeit erfolgt zu 100 % eine Positionsbestimmung. Für den Rover RTK werden keine Datenlücken detektiert. Allerdings erfolgt nicht zu allen Zeitpunkten eine RTK-Lösung. Insbesondere am wird eine Position in drei von vier Zeitpunkten im Stand-Alone-Modus bestimmt. 16
17 -TN-MK1-V02-07-Positionsverfuegbarkeit_und_Qualitaet.doc Version Positionsverfügbarkeit Der erste Ansatz für die Auswertung der Positionslösung der drei oben aufgeführten Ortungsverfahren ist die Untersuchung, wie oft, bezogen auf den Messzeitraum, Positionslösungen vorlagen. Aus diesen Untersuchungen lassen sich erste Rückschlüsse auf die Kontinuität (s. [Ref 11]) als auch Hinweise auf mögliche Störungen gewinnen. Man geht dabei davon aus, dass im ungestörten Fall 1 eine Positionierung mit GNSS und EGNOS innerhalb des Untersuchungsgebietes immer möglich sein müsste, da neben der Satellitenverbindung keine weiteren Datenverbindungen benötigt werden. Im Fall der RTK-basierten Positionierung ergeben sich jedoch Einschränkungen durch die Verfügbarkeit der benötigten Kommunikationsverbindung zwischen Rover und Referenzstation. Hier wird die Positionsverfügbarkeit durch die Sendeleistung der Referenzstation und innerhalb des Sendebereichs durch Abschirmungseffekte der UHF-Verbindung (Gebäude, Schiffe) stark beeinflusst. Ein Indiz dafür, dass eine RTK-Positionslösung auf dem Rover aufgrund von Kommunikationsproblemen nicht möglich ist, lässt sich aus dem Alter der Korrekturnachricht ableiten. Die Verfügbarkeit einer Positionslösung wird an dem in den NMEA-Nachrichten enthaltenen Indikator für die Positionslösung (Position Fix Indikator) festgemacht. Je nach Art der Positionslösung (GNSS, RTK, EGNOS) werden vom Empfänger die in Tab. 4-1 aufgelisteten Werten gesetzt. Tab. 4-1: NMEA Position Fix Indikator Wert Bedeutung Erläuterung 0 No Fix Keine Positionslösung möglich 1 Single Point GNSS Code-Phasenlösung 2 2 DGPS Differentielles GNSS, einschließlich EGNOS u. WAAS 3 GPS PPS Mode GPS Positionierung im Precise Positioning -Modus 4 RTK Fix RTK mit gelösten ganzzahligen Phasenmehrdeutigkeiten 5 RTK Float RTK mit Abschätzung der Phasenmehrdeutigkeiten 4.1. Referenzstation Wie bereits in Abschn. 3.1 aufgeführt und [Ref 3] entnommen, liegt die Positionsverfügbarkeit beim GBAS-Empfänger der Referenzstation an allen Tagen bei 100%. Eine unabhängig von [Ref 3] durchgeführte Datenanalyse (s. Tab. 4-2) bestätigte dieses Ergebnis. 1 Ungestört bedeutet hier, dass die GNSS- bzw. EGNOS-Signale ohne Beeinträchtigung, durch z. B. Abschattung, empfangen werden. 2 Festgelegt durch die Empfängerkonfiguration s. [Ref 4]. 17
18 -TN-MK1-V02-07-Positionsverfuegbarkeit_und_Qualitaet.doc Version 2.0 Tab. 4-2: Positionsverfügbarkeit an der Referenzstation Datum GBAS Positionsverfügbarkeit / % Rover Tab. 4-3 zeigt die für den jeweiligen Messtag ermittelte Positionsverfügbarkeit der drei Rover- Empfänger (Datenlücken in der Aufzeichnung wurden von der Auswertung ausgenommen, s. Kap.3). Die Tatsache, das Positionslösungen an allen Tagen auf allen Empfängern zu 100% verfügbar waren, zeigt das es auf dem Rover keinerlei umgebungsbedingte Situationen gab, in denen Abschattung, Mehrwegeausbreitung oder atmosphärische Fehler eine Positionierung generell unmöglich machten 3. Tab. 4-3: Positionsverfügbarkeit am Rover Positionsverfügbarkeit / % Datum GRTK GNSS GGEG Während eine Stand-Alone-Positionslösung lediglich den ungestörten Empfang von zumindest vier GNSS-Signalen voraussetzt, benötigen differentielle Verfahren eine zusätzliche Kommunikationsverbindung für die Übertragung der Korrektursignale. Störungen solcher Verbindungen sorgen dafür, dass der Empfänger aus dem differentiellen Modus (EGNOS bzw. RTK) in den Stand-Alone-Modus (auch Single-Point-Modus) übergeht. Eine Überprüfung der Messdaten, inwieweit EGNOS-Korrekturdaten für den GGEG zur Verfügung standen, zeigte, dass dies an allen Messtagen und zu jeder Zeit der Fall war (vergleiche auch Abschn. 5.3). Im Falle des GRTK der für eine RTK-Fix-Lösung Korrekturendaten der Referenzstation benötigt, die lediglich mit einer Leistung von 0.5W sendet und z. T. von Gebäuden und Schiffen abgeschattet wird, ergibt sich ein anderes Bild. Tab. 4-4 zeigt die Anzahl der Positionslösungen im RTK-Fix-Modus in Prozent, bezogen auf die Gesamtzahl der Messungen. In der Tabelle werden folgende Fälle Unterschieden: 1. Anzahl der RTK-Positionslösungen für den gesamten Messtag, 2. Anzahl der RTK-Positionslösungen im Umkreis von 5km um die Referenzstation, 3. Anzahl der RTK-Positionslösungen im Umkreis von 10km um die Referenzstation. 3 Dies bedeutet natürlich nicht, dass es nicht zu Verlusten einzelner Signale kam. 18

19 -TN-MK1-V02-07-Positionsverfuegbarkeit_und_Qualitaet.doc Version 2.0 Der Vergleich aller drei Werte in Tab. 4-4 für den jeweiligen Tag zeigt deutlich die Zunahme der Anzahl der Positions-Lösungen im RTK-Fix-Mode, je näher sich der Rover an der Referenzstation befand. Unterschiede der Werte zwischen den einzelnen Tagen ergeben sich dabei aus den unterschiedlichen Kursen, die gefahren wurden, sowie den unterschiedlichen Abschattungsbedingungen durch andere Schiffe am jeweiligen Tag. Tab. 4-4: Verfügbarkeit einer Positionslösung im RTK-Fix-Modus unterschieden nach der Entfernung zur Referenzstation Datum Entfernung zur Referenzstation Positionsverfügbarkeit / % GRTK (RTK Fix-Mode) ohne Einschränkung <= 10km <=5km (75.971) (85.799) (68.264) (82.294) (65.672) (76.303) Untersetzt wird diese These durch den in Abb. 4-1 dargestellten Zusammenhang zwischen der Positionsverfügbarkeit in Abhängigkeit von der Distanz vom Rover zur Referenzstation. Berechnet nun mit einer Auflösung von einem Kilometer. Die Abbildungen zeigen deutlich, dass im Umfeld von einem Kilometer um die Referenzstation RTK-Fix zu allen Zeiten erreicht werden konnte und die Anzahl der Fix-Lösungen dann im Trend mit zunehmender Entfernung abnimmt. Es sei außerdem angemerkt, dass über einem Radius von 12 km keine RTK-Fix-Lösungen auftraten. Die vorhandene Sendeleistung begrenzte somit die RTK-Positionierung im Umfeld des Rostocker Hafens auf diese Maximalentfernung. 4 Im Radius größer als 5 km um die Referenzstation wurde an diesem Tag nicht gemessen 19
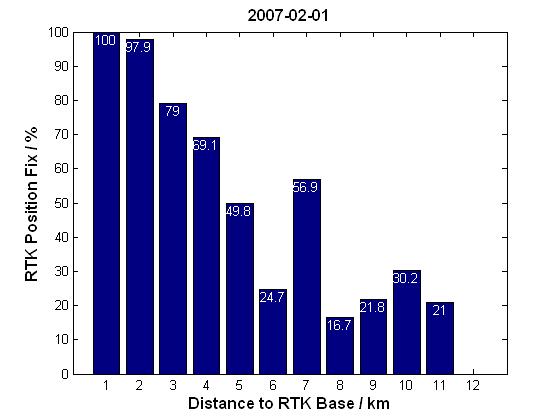
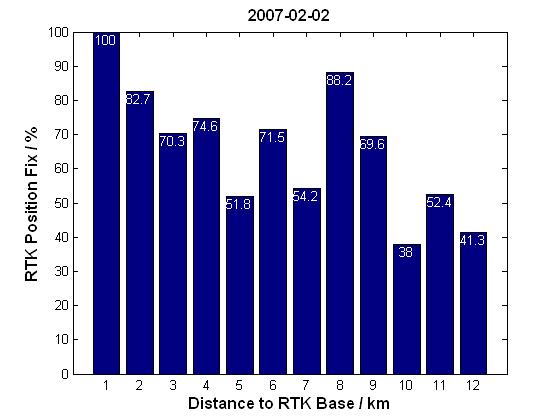
20 -TN-MK1-V02-07-Positionsverfuegbarkeit_und_Qualitaet.doc Version 2.0 Abb. 4-1: RTK-Positionsverfügbarkeit in Abhängigkeit von der Entfernung zur Referenzstation im Empfangsbereich (12 km) 20
21 -TN-MK1-V02-07-Positionsverfuegbarkeit_und_Qualitaet.doc Version Positionsgenauigkeit Betrachtet man die in der -Messkampagne angewandten Ortungsverfahren bzgl. der zu erwartenden Genauigkeit, so ergibt sich aus der Literatur folgendes Bild: Bei RTK-Verfahren unterscheidet man generell zwei Typen von Positionslösungen (s. z. B. [Ref 10], ): 1. Real Time Kinematic (RTK) Float Positions; typische Genauigkeit bei kinematischen Anwendungen etwa 1.0 bis 2.0 Meter [Ref 13], 2. Real Time Kinematic (RTK) Fixed Solutions; typische Genauigkeit etwa 1-5 Zentimeter). Die GNSS-Lösung wurde erreicht durch Kombination von GPS und GLONASS und durch Aktivierung von Carrier-Smoothing im Empfänger. Bei diesem Verfahren wird das vor allem durch Mehrwegeeffekte hohe Kode-Rauschen durch die Nutzung von Phasenmessungen zu einem Großteil kompensiert. Typische Genauigkeiten liegen im Meter-Bereich. Aktivierung des WAAS/EGNOS-Mode; typische erwartete Genauigkeit mit aktiviertem WAAS/EGNOS etwa 1-3 Meter [Ref 14]. Um eine Bewertung der mit den unterschiedlichen Verfahren erreichten Positionsgenauigkeit vornehmen zu können, müssen hochgenaue Referenzpositionen bestimmt werden. Erreicht wurde dies durch die Post-Prozessierung aller während der Messkampagne aufgezeichneten Empfängerrohdaten. Das Ergebnis dieser Post-Prozessierung sind die sogenannten TTC-Dateien (s. Abschn. 2.2), die für jeden Messzeitpunkt WGS84-Koordinaten und aus dem Lösungsverfahren gewonnene RMS- Abschätzungen bzgl. der Koordinaten-Qualität enthalten. Eine detaillierte Beschreibung der Erzeugung von Referenzdaten einschließlich Aussagen über deren Qualität findet sich in [Ref 5]. Für die Bewertung der Positionsgenauigkeit und die Interpretation der Daten ist eine statistische Abschätzung der verwendeten Referenzpositonen unerlässlich. Da in den TTC-Dateien keine Aussagen über die absolute und insbesondere horizontale Genauigkeit gegeben sind, beginnt der im Folgenden durchgeführte Vergleich der unterschiedlichen Positionslösungen mit den Referenzdaten mit einer Abschätzung der Qualität der verwendeten Referenzdaten. Diese Abschätzung erfolgt dabei ausschließlich auf Grundlage der Daten der Referenzstation, da ihre Position als statisch angenommen werden kann Genauigkeit der Referenzdaten Um eine Abschätzung zu bekommen, welche Genauigkeit die durch Post-Prozessierung bestimmt Positionen aufweisen, wurden die TTC-Daten der als statisch angenommenen Referenzstation genauer analysiert. Untersucht wurden dabei zwei Fragestellungen: 1. Welche Schwankungen bzgl. der Position im Raum (Ortsvektor) zeigen sich in den Daten der Referenzstation? 2. Welche horizontalen Positionsabweichungen bezogen auf den entsprechenden Tagesmittelwert zeigen sich in den Daten der Referenzstation? Zur Beantwortung der ersten Fragestellung wurden die Schwankungen des 3D-Ortsvektors der Stationskoordinaten berechnet und auf den Median-Wert bezogen. Die Ergebnisse für die einzelnen Tage sind in Abb. 5-1 dargestellt, in der neben der Grafik auch die Standardabweichungen (σ, 2σ und 3σ), die maximal aufgetretene Abweichung des entsprechenden Tages (max Dev ) als auch die absolute Differenz zwischen Median- und arithmetischen Mittelwert ( Mean-Median 5 ) aufgeführt sind. Ein Vergleich der Grafiken zeigt eine deutliche Variation der Position der Referenzstation an den unterschiedlichen Tagen. Während am und sowohl die 3σ-Standardabweichung als 5 Eine große Differenz zwischen Mittelwert und Median ist ein Hinweis auf Ausreißer in den Daten 21
22 -TN-MK1-V02-07-Positionsverfuegbarkeit_und_Qualitaet.doc Version 2.0 auch die Maximalwerte in der Abweichung deutlich unter 10 cm lagen, wurden am σ- Standardabweichungen von 70 cm und am σ-Standardabweichungen von 26 cm berechnet (s. Abb. 5-1). Abb. 5-1: Streuung der für die Referenzstation ermittelten TTC-Positionen um den Median Nimmt man nun an, dass keine oder vernachlässigbar kleine systematische Fehler in den Ergebnissen der Post-Prozessierung auftreten, so dass die Tagesmittel die wahre Position der Referenzstation repräsentieren und berechnet die horizontale Positionsabweichung im Bezug zu diesen Werten, führt dies zu den in Abb. 5-2 dargestellten Werten. In dort aufgeführten Einzelabbildungen zeigen sich innerhalb der Messperiode 3σ-Standardabweichungen zwischen 2cm und 32 cm und Maximalabweichungen zwischen 5 cm und 32 cm, wobei die jeweils höchsten Fehler wiederum am und auftreten. Die Tatsache, dass die in Abb. 5-1 auftretenden Fehler kleiner sind als die in Abb. 5-2, ist im wesentlichen darauf zurückzuführen, dass die in der GNSS-Positionierung auftretenden Höhenfehler aufgrund der Satellitengeometrie zwei- bis dreimal höher sind als die horizontalen Fehler. Die TTC-Analyse der Roverdaten beruht auf einer Post-Prozessierung, ähnlich wie sie für die Referenzstation durchgeführt wurde (vergl. [Ref 5]). Es wird daher davon ausgegangen, dass die prozessierten Referenztrajektorien des Rovers eine ähnliche, aber auf keinen Fall bessere Genauigkeit aufweisen, da bei der Bestimmung der Referenzkoordinaten im Gegensatz zum Rover keine Positionsänderungen des Antennenphasenzentrums berücksichtigt werden müssen. Dies ist bei allen folgenden Analysen und Diskussionen bzgl. der Positionsgenauigkeit zu berücksichtigen ist. Was an dieser Stelle bleibt, ist natürlich noch die Frage, warum am und so starke Schwankungen in der Positionsberechnung auftreten. Eine einfache Möglichkeit, auf die hier kurz eingegangen werden soll, sind Schwankungen des als statisch angesehenen Phasenzentrums der Referenzantenne. Die Antenne der Referenzstation war auf dem Dach des Messbusses befestigt. 22
23 -TN-MK1-V02-07-Positionsverfuegbarkeit_und_Qualitaet.doc Version 2.0 Dieser war zum Einen weder abgestützt und zum Anderen aufgrund des Fahrzeugtyps und der exponierten Position auf der Pier sehr windanfällig. Abb. 5-2: Streuung der für die Referenzstation ermittelten horizontalen TTC-Positionen um den für alle Tage fixen Referenzwert Für dem Messzeitraum ergeben sich die in Tab. 5-1 aufgeführten Tageswerte für die Windgeschwindigkeiten. Tab. 5-1: Windgeschwindigkeiten der westlichen Ostsee im Messzeitraum Datum Windstärke/Bft (Quelle: - Messprotokolle) Windstärke/Bft (Quelle: 6 ) (Böhen 7) WNW , Böhen 10 5 (Böhen 8) WSW (Böhen 6) NW (Böhen 6) WSW Aus dem Vergleich der Windstärken und der Streuung in den TTC-Daten lässt sich jedoch keine Beziehung ableiten. Es zeigt sich lediglich, dass der Tag mit den geringsten Windgeschwindigkeiten auch die geringste Streuung aufweist. Da neben der Windgeschwindigkeit auch andere Umgebungs- 6 vergl. Abb. 7-1, Abb. 7-2, Abb. 7-3, Abb. 7-4 im Anhang 23
24 -TN-MK1-V02-07-Positionsverfuegbarkeit_und_Qualitaet.doc Version 2.0 faktoren eine Rolle spielen (so war der Bus auf der Ostseite im Windschutz eines hohen Holzstapels, der jedoch während der Messkampagne abgetragen wurde), lassen sich diese Einflüsse im nachhinein leider nicht mehr quantitativ erfassen und zuordnen Zeitlicher Verlauf der Positionsmoden des GRTK Wie bereits in Abschn. 3.2 erwähnt, gibt ein Empfänger, der im RTK-Modus betrieben wird, RTK-Fix-, RTK-Float- und Single-Point-Positionen in unterschiedlicher Qualität aus. In welchem Modus der Empfänger arbeitet, hängt im Wesentlichen davon ab, ob zeitnahe Korrekturdaten, also Korrekturdaten die nur wenige Sekunden alt sind, empfangen werden können. In Abb. 5-3, Abb. 5-4, Abb. 5-5 und Abb. 5-6 ist der verwendete Positionierungs-Modus, wie er in den NMEA-Daten abgebildet ist, für den entsprechenden Messtag über der Zeit aufgetragen. Abb. 5-3: Positions-Moden des GRTK bei der Messfahrt am Abb. 5-4: Positions-Moden des GRTK bei der Messfahrt am Abb. 5-5: Positions-Moden des GRTK bei der Messfahrt am

25 -TN-MK1-V02-07-Positionsverfuegbarkeit_und_Qualitaet.doc Version 2.0 Abb. 5-6: Positions-Moden des GRTK bei der Messfahrt am Die Grafiken dokumentieren zum Einen die bereits erwähnte Tatsache, dass eine Positionierung für den GRTK jederzeit möglich war, zum Anderen zeigen sie das Float-Lösungen nur kurzzeitig beim Übergang zwischen Single-Point- und RTK-Fix-Lösung gebildet wurden Zeitlicher Verlauf der Positionsmoden des GGEG Der GGEG-Empfänger gibt EGNOS-basierte DGPS- und Single-Point-Positionen mit den entsprechenden Positionsgenauigkeiten aus. In welchem Modus der Empfänger arbeitet hängt, wie beim GRTK, im Wesentlichen davon ab, ob Korrekturdaten empfangen werden können. Da die geostationären Satelliten, über die die EGNOS-Korrekturen übertragen werden (s. Abb. 5-7), sich aus Rostocker Sicht im Süden und dort sehr tief (ca. 28 ) über dem Horizont befinden, konnten Einbußen in der Positionsgenauigkeit aufgrund von Unterbrechungen des Übertragungsweges der EGNOS- Korrekturen nicht ausgeschlossen werden. Abb. 5-7: Position und Abdeckungsbereich der EGNOS-Satelliten (Quelle: ESA) Zur Bewertung der Positionsgenauigkeit, die bei der Verwendung von GPS-Codemessungen in Kombination mit EGNOS-Korrekturen erreicht werden kann, wurde daher anhand der NMEA-Daten überprüft ob während der Messkampagne ein Wechsel zwischen den Positions-Moden auftrat. Die Ergebnisse der Auswertung finden sich in Abb. 5-8, Abb. 5-9, Abb und Abb Sie zeigen, dass zu jeder Zeit EGNOS-Korrekturen empfangen wurden und dass somit die Auswertung der GGEG- Positionsdaten ohne weitere Unterscheidung der Positions-Moden vorgenommen werden kann. 25
26 -TN-MK1-V02-07-Positionsverfuegbarkeit_und_Qualitaet.doc Version 2.0 Abb. 5-8: Positions-Moden des GGEG bei der Messfahrt am Abb. 5-9: Positions-Moden des GGEG bei der Messfahrt am Abb. 5-10: Positions-Moden des GGEG bei der Messfahrt am Abb. 5-11: Positions-Moden des GGEG bei der Messfahrt am
27 -TN-MK1-V02-07-Positionsverfuegbarkeit_und_Qualitaet.doc Version Alter der RTK-Korrekturnachricht und Entfernung zur Referenz Ein wichtiges Kriterium für das Erreichen einer hochgenauen (1-2cm) RTK-basierten Positionslösung ist das Alter der verwendeten Daten aus der Korrekturnachricht. Allgemein gilt, dass für eine optimale Positionsbestimmung die RTK-Korrekturdaten ein Alter von 0.5 2s nicht überschreiten sollten (s. z. B. [Ref 12]). Der Hauptgrund für diese hohe Aktualisierungsbedarf liegt darin, dass nicht einfach Distanzkorrekturen wie im Falle von DGPS gesendet werden, sondern Trägerphasen, die über die sogenannten Doppeldifferenzen mit den Phasenmessungen des Rovers verarbeitet werden müssen. Die Ergebnisse der statistischen Auswertung der in den NMEA-Daten des GRTK enthaltenen Informationen über das Alter der von der Referenzstation bereitgestellten Daten im Bezug zur geometrischen Entfernung zwischen Rover und Referenzstation für die einzelnen Messtage ist in Abb dargestellt. Abb. 5-12: Alter (Mittel und STD) der RTK Korrektur am Rover bezogen auf die Entfernung zur Referenzstation Die Ergebnisse zeigen, wie im Mittel aber auch in der Schwankungsbreite an allen vier Tagen das Alter der verwendeten Daten mit dem größer werden des Abstands zur Referenzstation im Trend zunimmt. Legt man diesem Ergebnis die Annahme zugrunde, dass Korrekturdaten, die älter als zwei Sekunden sind, nicht mehr die volle RTK-Positionsgenauigkeit ermöglichen, so lässt sich aus den Abbildungen schließen, das dies ca. bei Abständen zur Referenzstation von etwa 5-6km der Fall war Horizontale Positionsgenauigkeit In den folgenden Abschnitten sind, unterschieden nach den Empfängern, die erreichten horizontalen Positionsgenauigkeiten des jeweiligen Messtages graphisch dargestellt. Unter horizontaler Positions- 27
28 -TN-MK1-V02-07-Positionsverfuegbarkeit_und_Qualitaet.doc Version 2.0 genauigkeit wird dabei die horizontale Abweichung zwischen der post-prozesssierten TTC-Lösung und der im Rover in Echtzeit bestimmter Position verstanden. Die Grafiken zeigen dabei in einem Raster die räumliche Verteilung der Abweichungen in X- und Y-Richtung 7 sowie 8, farblich kodiert, die Anzahl der Messwerte in dem entsprechenden Rasterpunkt Referenzstation (GBAS) Abb zeigt die horizontale Positionsgenauigkeit des GBAS-Empfängers an den vier Messtagen. Die erreichten Positionsgenauigkeiten dieser Code/Carrier-basierten GPS+GLONASS-Lösungen sind an allen Messtagen unter drei Metern und weisen sowohl in X- als auch in Y-Richtung Mittelwerte und Standardabweichungen kleiner als ein Meter auf. Die Ergebnisse sind damit im erwarteten Bereich und zeigen keine Besonderheiten. Abb. 5-13: Verteilung der Horizontalen Positionsabweichungen des GBAS Angemerkt sei auch, dass die tagesweise unterschiedliche Qualität der TTC-Referenzdaten mit den größten Abweichungen am und sich in diesen Ergebnissen nicht widerspiegelt. 7 Die Y-Richtung entspricht der Ausrichtung nach Norden 8 Ausgenommen sind die RTK-Float-Lösungen - bei ihnen ist aufgrund der geringen Anzahl der Messwerte eine Rasterung und farbliche Kodierung nicht sinnvoll 28
29 -TN-MK1-V02-07-Positionsverfuegbarkeit_und_Qualitaet.doc Version GRTK (Float) RTK-Float-Lösungen wurden nur über wenige Sekunden im Übergang von RTK-Fix zu Single Point und umgekehrt gebildet. Aufgrund dieses Übergangscharakters traten sie, im Verhältnis zu den anderen im RTK möglichen Positions-Moden, nur selten auf. Am gab es nur 9 Float-Lösungen, die keine statistische Aussage zulassen. Die geringe Anzal ist darauf zurückzuführen das nur in einer geringen Distanz zu Referenzstation (<5 km) gemessen wurde, so das die Übertragung der RTK-Korrekturdaten in diesem Messzeitraum relativ ungestört war. An den Folgetagen traten Float-Lösungen häufiger auf. Abb zeigt die horizontalen Positionsabweichungen die an den Messtagen vom bis im Float-Modus auftraten. Wie aus den Abbildungen ersichtlich, liegt die Positionierungsgenauigkeit in diesem Übergangsmodus im Bereich von 1 bis maximal 2 m.. Abb. 5-14: Abweichung der RTK-Float-Lösungen von der Referenzposition GRTK (Fix) Abb zeigt die horizontale Positionsgenauigkeit des GRTK and den vier Messtagen, wobei nur Lösungen im RTK-Fix-Modus in die Analyse einbezogen wurden. Die erreichten Positionsgenauigkeiten sind an allen Messtagen unter 0.8 Metern und weisen sowohl in X- als auch in Y-Richtung Mittelwerte in der Abweichung im Bereich von 1 bis 2 Zentimetern auf, sowie Standardabweichungen kleiner als 10 Zentimeter. Auffällig an diesen Werten sind zum Einen die für RTK-Fix-Messungen unerwartet hohen Streuungen 9, sowie die, wenn auch geringe, Anhäufung von Abweichungen in 9 Gemeint sind Streuungen größer als 2-3 cm. 29
30 -TN-MK1-V02-07-Positionsverfuegbarkeit_und_Qualitaet.doc Version 2.0 südwestlicher Richtung (rot umrandet), die nur am auftraten. Da, wie in Abschn. 5.4 untersucht, dass Alter der RTK-Korrekturdaten eine wesentliche Rolle für die Qualität der Lösung spielt, wurde dieser Aspekt in die Analyse mit einbezogen. Die Ergebnisse dieser nun erweiterten Analyse finden sich im nächsten Abschnitt. Abb. 5-15: Verteilung der Horizontalen Positionsabweichungen des GRTK (RTK-Fix) 30
31 -TN-MK1-V02-07-Positionsverfuegbarkeit_und_Qualitaet.doc Version GRTK Fix mit zeitnahen Korrekturinformationen Um die Abhängigkeit der Positionsgenauigkeit beim RTK-Verfahren vom Alter der übertragenen Korrekturdaten abzuschätzen, wurde die im vorhergehenden Abschnitt beschriebene Datenanalyse wiederholt. Es wurden diesmal jedoch nur Daten in die Analyse mit einbezogen, bei denen die Positionsberechnungen mit den Daten von der Referenzstation erfolgten, die nicht älter als 1 Sekunde waren. Die Ergebnisse dieser Analysen finden sich in Abb Die nun vorliegenden Ergebnisse mit Abweichungen und Streuungen im Bereich weniger Zentimeter zeigen deutlich, wie wichtig es ist zeitnahe Korrekturdaten zu verwenden. Angemerkt sei auch, dass die noch bestehenden Ausreißer in den Ergebnissen vom bis 02.02, insbesondere die Ergebnisse des rot markierten Bereichs am sich auf Ungenauigkeiten in den TTC-Daten zurückführen lassen (vergl. Abschn. 5.1 und [Ref 5]). Abb. 5-16: Verteilung der Horizontalen Positionsabweichungen des GRTK (RTK-Fix) bei der nur zeitnahe (1 Sek.) Korrekturinformationen verwendet wurden. 31
32 -TN-MK1-V02-07-Positionsverfuegbarkeit_und_Qualitaet.doc Version GNSS Abb. 1-1 zeigt die horizontale Positionsgenauigkeit des GNSS an den vier Messtagen. Die auf dem Rover erreichten Positionsgenauigkeiten dieser Code/Carrier-basierten GPS+GLONASS-Lösungen sind deutlich ungenauer (eine Stärke mittlere Verschiebung und größere Streuung der Abweichungen) als die mit dem gleichen Verfahren berechneten Positionen der Referenzstation. Doch auch hier treten keine Abweichungen größer als drei Meter auf. Wie auch beim GBAS-Empfänger stimmen die Ergebnisse mit den aus der Literatur erwarteten überein. Die im Vergleich zum GBAS auftretende größere Verschiebung der Mittelwerte sowie die stärkere Streuung erklären sich aus der Dynamik des Rovers. Abb. 5-17: Verteilung der horizontalen Genauigkeit des GNSS 32


.")

33 -TN-MK1-V02-07-Positionsverfuegbarkeit_und_Qualitaet.doc Version GGEG Abb zeigt die horizontale Positionsgenauigkeit des GGEG and den vier Messtagen. Die auf dem Rover erreichten Positionsgenauigkeiten dieser GPS+EGNOS-Lösung zeigen deutlich eine größere Streuung der Positionsabweichungen, als in allen anderen der hier untersuchten Verfahren zu finden ist. Zu beachten ist hier jedoch, dass diese durch Verwendung von EGNOS gebildeten Positionslösungen auf GPS-Codephasenmessungen beruhen (Konfigurationsparameter des Empfängers). Eine Beurteilung der Ergebnisse ließe sich in sinnvoller Weise nur durch den Vergleich mit rein Codebasierten GPS-Positionslösungen, bei denen keine EGNOS-Korrektur verwendet wurde, vornehmen. Wie auch bei allen anderen Empfängern stimmen diese Ergebnisse mit den aus der Literatur erwarteten überein (s. [Ref 14]). Abb. 5-18: Verteilung der horizontalen Genauigkeit des GGEG 5.6. Raum- und Zeitbezug der Horizontalen Positionsfehler der Roverdaten In diesem Abschnitt wurden die horizontalen Positionsfehler der Rover-Empfänger auf den durch die TTC-Daten beschriebenen Kurs des Schiffes abgebildet. Aus den Abbildungen lässt sich erkennen, dass beim GRTK ein Zusammenhang zwischen der Entfernung zur Referenzstation und den berech- 33
34 -TN-MK1-V02-07-Positionsverfuegbarkeit_und_Qualitaet.doc Version 2.0 neten Positionsabweichungen besteht. Die Positionsabweichungen beim GNSS und GGEG weisen, wie erwartet, im Vergleich zwischen den Tagen keine räumliche Beziehung auf GRTK Abb. 5-19: Abbildung des horizontalen Positionsfehlers des GRTK auf die Referenzposition 34

35 -TN-MK1-V02-07-Positionsverfuegbarkeit_und_Qualitaet.doc Version GNSS Abb. 5-20: Abbildung des horizontalen Positionsfehlers des GNSS auf die Referenzposition 35
36 -TN-MK1-V02-07-Positionsverfuegbarkeit_und_Qualitaet.doc Version GGEG Abb. 5-21: Abbildung des horizontalen Positionsfehlers des GGEG auf die Referenzposition 36
37 -TN-MK1-V02-07-Positionsverfuegbarkeit_und_Qualitaet.doc Version Positionsgenauigkeit und HDOP In diesem Abschnitt wird untersucht, inwieweit eine Beziehung zwischen den horizontalen Positionsabweichungen der einzelnen Empfänger und der Satellitengeometrie (ausgedrückt durch HDOP) besteht. Die Unterschiede in der Verteilung und dem Wertebereich der HDOP-Werte zwischen den einzelnen Empfängern ergeben sich dabei aus folgenden Gründen: Der GBAS-Empfänger war über 24 Stunden in Betrieb, so dass sich im Vergleich zum GNSS, der nur während der Messfahrt in Betrieb war, neben den unterschiedlichen Positionen auch eine unterschiedliche zeitliche Länge Datenbasis, ergibt. Bei den RTK-Messungen wurden nur RTK-Fix-Daten berücksichtigt. Bei GGEG-Messungen wurden keine GLONASS-Satelliten mit einbezogen, so dass sich andere und höher HDOPs ergeben als für den GBAS- oder GNSS-Empfänger Referenzstation (GBAS) Wie aus Abb. 5-22, Abb. 5-23, Abb und Abb ersichtlich, sind die HDOP-Werte des GBAS- Empfängers an der Referenzstation an allen Tagen kleiner als 1,1 und weisen kleine Streuungen im Bereich kleiner 0.1 auf. HDOP-Werte in diesem Wertebereich und mit dieser geringen Streuung sind als optimal anzusehen. Aus der Zuordnung der Positionsfehler zu den HDOP-Werten lässt sich keine Beziehung ableiten. Abb. 5-22: HDOP und Horizontaler Positionsfehler des GBAS am Abb. 5-23: HDOP und Horizontaler Positionsfehler des GBAS am
38 -TN-MK1-V02-07-Positionsverfuegbarkeit_und_Qualitaet.doc Version 2.0 Abb. 5-24: HDOP und Horizontaler Positionsfehler des GBAS am Abb. 5-25: HDOP und Horizontaler Positionsfehler des GBAS am Rover GRTK Wie aus Abb. 5-26, Abb. 5-27, Abb und Abb ersichtlich sind die HDOP-Werte des GRTK- Empfängers auf dem Rover an allen Tagen kleiner als 2,2 und weisen kleine Streuungen im Bereich 0.1 und kleiner auf. Auch hier sind die HDOP-Werte in diesem Wertebereich und mit dieser geringen Streuung als optimal anzusehen. Aus der Zuordnung der Positionsfehler zu den HDOP-Werten lässt sich keine Beziehung ableiten. Abb. 5-26: HDOP und Horizontaler Positionsfehler des GRTK am
39 -TN-MK1-V02-07-Positionsverfuegbarkeit_und_Qualitaet.doc Version 2.0 Abb. 5-27: HDOP und Horizontaler Positionsfehler des GRTK am Abb. 5-28: HDOP und Horizontaler Positionsfehler des GRTK am Abb. 5-29: HDOP und Horizontaler Positionsfehler des GRTK am GNSS Wie aus Abb. 5-30, Abb. 5-31, Abb und Abb ersichtlich sind die HDOP-Werte des GNSS- Empfängers auf dem Rover an allen Tagen kleiner als 1,1 und weisen kleine Streuungen im Bereich 0.1 und kleiner auf. Auch hier sind die HDOP-Werte in diesem Wertebereich und mit dieser geringen Streuung als optimal anzusehen und lassen sich in etwa mit denen der GBAS-Station vergleichen. Aus der Zuordnung der Positionsfehler zu den HDOP-Werten lässt sich keine Beziehung ableiten. 39
40 -TN-MK1-V02-07-Positionsverfuegbarkeit_und_Qualitaet.doc Version 2.0 Abb. 5-30: HDOP und Horizontaler Positionsfehler des GNSS am Abb. 5-31: HDOP und Horizontaler Positionsfehler des GNSS am Abb. 5-32: HDOP und Horizontaler Positionsfehler des GNSS am Abb. 5-33: HDOP und Horizontaler Positionsfehler des GNSS am
41 -TN-MK1-V02-07-Positionsverfuegbarkeit_und_Qualitaet.doc Version GGEG Wie aus Abb. 5-34, Abb. 5-35, Abb und Abb. 5-37ersichtlich sind die HDOP-Werte des GGEG- Empfängers auf dem Rover an allen Tagen kleiner als 2,5 und weisen kleine Streuungen im Bereich 0.3 und kleiner auf. Auch wenn dieser Empfänger die höchsten der gemessenen HDOP-Werte mit der größten Streuung aufweist sind die Werte auch hier als optimal anzusehen und auch hier lassen sich aus der Zuordnung der Positionsfehler zu den HDOP-Werten keine Beziehung ableiten. Abb. 5-34: HDOP und Horizontaler Positionsfehler des GGEG am Abb. 5-35: HDOP und Horizontaler Positionsfehler des GGEG am Abb. 5-36: HDOP und Horizontaler Positionsfehler des GGEG am
42 -TN-MK1-V02-07-Positionsverfuegbarkeit_und_Qualitaet.doc Version 2.0 Abb. 5-37: HDOP und Horizontaler Positionsfehler des GGEG am Fehlerwahrscheinlichkeiten In Ergänzung zu den Analysen der vorhergehenden Abschnitte sind hier, die aus den horizontalen Positionsabweichungen und der Anzahl der Messungen sich ergebenden 2σ- und 3σ- Standardabweichungen bzw. Fehlerwahrscheinlichkeiten für die einzelnen Empfänger und Messtage aufgelistet Empfänger GRTK Fehlerwahrscheinlichkeit 95 % 99,99% m m m m 9 GNSS m m GBAS m m GGEG m m Empfänger GRTK Fehlerwahrscheinlichkeit 95 % 99,99% m m m m 9 GNSS m m GBAS m m GGEG m m Alter der Korrekturnachricht nicht älter als 1 sec 42
43 -TN-MK1-V02-07-Positionsverfuegbarkeit_und_Qualitaet.doc Version 2.0 Empfänger GRTK Fehlerwahrscheinlichkeit 95 % 99,99% m m m m 9 GNSS m m GBAS m m GGEG m m Empfänger GRTK Fehlerwahrscheinlichkeit 95 % 99,99% m m m m 9 GNSS m m GBAS m m GGEG m m 43
44 -TN-MK1-V02-07-Positionsverfuegbarkeit_und_Qualitaet.doc Version Zusammenfassung Im Rahmen dieser TN wurden die im Rostocker Hafen aufgezeichneten Messdatendaten von vier GNSS-Empfängern untersucht. Dazu wurde ein Empfänger als statische Referenzstation eingerichtet (GBAS) und drei weitere Empfänger (GNSS, GGEG und GRTK) auf einem Forschungsschiff bei Messfahrten eingesetzt. Auf den Empfänger wurden drei unterschiedliche Verfahren zur Positionierung verwendet: 1. GBAS, GNSS: Positionierung mit Code- u. Trägerphasenmessungen von GPS- und GLONASS, 2. GGEG: Positionierung mit Codephasenmessungen des GPS in Kombination mit EGNOS, sowie 3. GRTK: RTK-basierte Positionierung unter Einbeziehung einer lokalen Referenzstation (GBAS) im Hafen von Rostock. Da im Gegensatz zur Vermessung bei der Navigation die Positionsbestimmung über relativ wenige Epochen erfolgt, ist zu erwarten, dass sich systematische und besonders kurzzeitig wirkende Fehlereinflüsse in den Satellitensignalen negativ auf die Positionsverfügbarkeit und Qualität auswirken. Einen signifikanten Einfluss auf die Ergebnisse sollten dabei insbesondere die Einflüsse von Mehrwegeeffekten, Abschattungen und, im Falle von RTK-Messungen, Probleme bei schlechter Datenübertragung von Referenzstationen haben. Ausgehend von diesen Annahmen wurden die Daten der vier Empfänger analysiert. Die Ergebnisse sind wie folgt: Es gab einige wenige Datenlücken in den NMEA-Daten, jedoch traten diese nicht synchron auf mehreren Empfängern auf. Positionslösungen waren auf allen Empfängern jederzeit möglich und Probleme durch Mehrwegeeffekte in dieser Analyse nicht nachzuweisen 11. Die durch die unterschiedlichen Verfahren erreichten Positionsgenauigkeiten entsprechen denen, die in der Literatur zu finden sind. Die HDOP-Werte waren zu jedem Zeitpunkt kleiner als 3 und damit als gut zu bezeichnen, selbst wenn, wie beim GGEG, nur GPS verwendet wurde. Die Streuung innerhalb der HDOP- Werte war gering und eine Beziehung zwischen Positionsfehler und HDOP-Werten ließ sich in den vorhandenen Daten nicht nachweisen. Einschränkungen in der Positionierungsverfügbarkeit und -Qualität bei der RTK-Anwendung lassen sich hier zum Einen auf Probleme mit bzw. dem Abbruch der Kommunikationsverbindung zurückführen, zum Anderen ist die RTK-Positionsgenauigkeit sehr stark abhängig vom Alter der Korrektur-Daten. Zusammenfassend kann gesagt werden, dass in Bezug auf Positionsverfügbarkeit und Qualität die aufgrund der vorhandenen Literatur getroffenen Erwartungen, die an die unterschiedlichen Verfahren geknüpft sind, vollständig erfüllt wurden. 11 Für eine nähere Betrachtung der Problematik der Mehrwegeausbreitung sei auf [Ref 6] verwiesen. 44
45 -TN-MK1-V02-07-Positionsverfuegbarkeit_und_Qualitaet.doc Version Anhang A. Zeitbezogene Darstellungen einzelner Parameter (RTK, GNSS, EGNOS) 45
46 -TN-MK1-V02-07-Positionsverfuegbarkeit_und_Qualitaet.doc Version
47 -TN-MK1-V02-07-Positionsverfuegbarkeit_und_Qualitaet.doc Version
48 -TN-MK1-V02-07-Positionsverfuegbarkeit_und_Qualitaet.doc Version
49 -TN-MK1-V02-07-Positionsverfuegbarkeit_und_Qualitaet.doc Version
50 -TN-MK1-V02-07-Positionsverfuegbarkeit_und_Qualitaet.doc Version
51 -TN-MK1-V02-07-Positionsverfuegbarkeit_und_Qualitaet.doc Version (RTK) 51
52 -TN-MK1-V02-07-Positionsverfuegbarkeit_und_Qualitaet.doc Version
53 -TN-MK1-V02-07-Positionsverfuegbarkeit_und_Qualitaet.doc Version
54 -TN-MK1-V02-07-Positionsverfuegbarkeit_und_Qualitaet.doc Version (RTK) 54
55 -TN-MK1-V02-07-Positionsverfuegbarkeit_und_Qualitaet.doc Version
56 -TN-MK1-V02-07-Positionsverfuegbarkeit_und_Qualitaet.doc Version
57 -TN-MK1-V02-07-Positionsverfuegbarkeit_und_Qualitaet.doc Version
58 -TN-MK1-V02-07-Positionsverfuegbarkeit_und_Qualitaet.doc Version
59 -TN-MK1-V02-07-Positionsverfuegbarkeit_und_Qualitaet.doc Version (RTK) 59
60 -TN-MK1-V02-07-Positionsverfuegbarkeit_und_Qualitaet.doc Version
61 -TN-MK1-V02-07-Positionsverfuegbarkeit_und_Qualitaet.doc Version
62 -TN-MK1-V02-07-Positionsverfuegbarkeit_und_Qualitaet.doc Version
63 -TN-MK1-V02-07-Positionsverfuegbarkeit_und_Qualitaet.doc Version
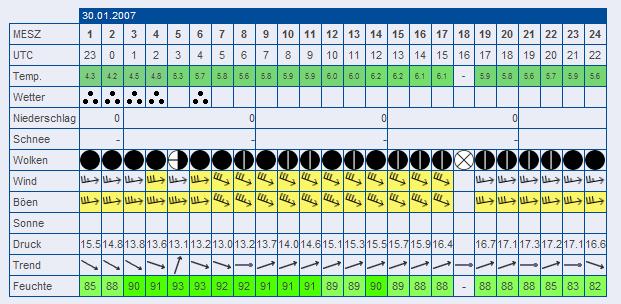
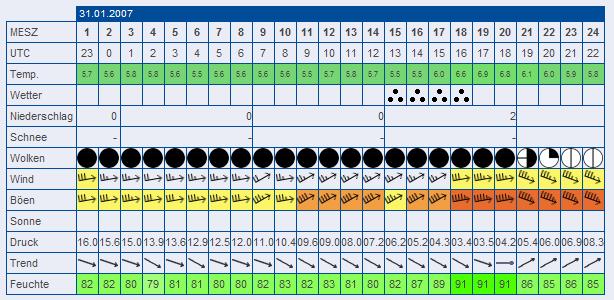
64 -TN-MK1-V02-07-Positionsverfuegbarkeit_und_Qualitaet.doc Version 2.0 B. Wetterdaten Warnemünde Abb. 7-1: Wetterdaten Warnemünde für den (Quelle: Abb. 7-2: Wetterdaten Warnemünde für den (Quelle: 64
 Abb. 7-4: Wetterdaten Warnemünde für den 02.02.2007 (Quelle: www.wetterspiegel.de) 65")
65 -TN-MK1-V02-07-Positionsverfuegbarkeit_und_Qualitaet.doc Version 2.0 Abb. 7-3: Wetterdaten Warnemünde für den (Quelle: Abb. 7-4: Wetterdaten Warnemünde für den (Quelle: 65
GBAS erste Schritt im maritimen Umfeld ALEGRO im Forschungshafen Rostock
 GBAS erste Schritt im maritimen Umfeld ALEGRO im Forschungshafen Rostock Dr. E. Engler Folie 1 Präzision und Verlässlichkeit der Ortung Mit der Entwicklung von Galileo und der Erneuerung bestehender Systeme
GBAS erste Schritt im maritimen Umfeld ALEGRO im Forschungshafen Rostock Dr. E. Engler Folie 1 Präzision und Verlässlichkeit der Ortung Mit der Entwicklung von Galileo und der Erneuerung bestehender Systeme
ALEGRO. Aufbau eines lokalen maritimen Ergänzungssystems zur Unterstützung hochpräziser Galileo-Anwendungen und Dienste im Forschungshafen Rostock
 Aufbau eines lokalen maritimen Ergänzungssystems zur Unterstützung hochpräziser Galileo-Anwendungen und Dienste im Forschungshafen Rostock Technical Note Messkampagne 27.05.2008 Untersuchungen zur Genauigkeit
Aufbau eines lokalen maritimen Ergänzungssystems zur Unterstützung hochpräziser Galileo-Anwendungen und Dienste im Forschungshafen Rostock Technical Note Messkampagne 27.05.2008 Untersuchungen zur Genauigkeit
Fortschritte bei den GNSS- Positionierungstechnologien für die Landwirtschaft
 Geodätische Grundlagen und Positionierung Fortschritte bei den GNSS- Positionierungstechnologien für die Landwirtschaft 5. Nationale Ackerbautagung 30. Januar 2018, Murten U. Wild 1 Agenda Einleitung GNSS
Geodätische Grundlagen und Positionierung Fortschritte bei den GNSS- Positionierungstechnologien für die Landwirtschaft 5. Nationale Ackerbautagung 30. Januar 2018, Murten U. Wild 1 Agenda Einleitung GNSS
GPS - Aktueller Stand und künftige Potentiale
 armasuisse Bundesamt für Landestopografie swisstopo Bereich GPS - Aktueller Stand und künftige Potentiale Informationstagung Landtechnik 2009 13. Oktober 2009, Tänikon U. Wild Agenda Satellitensysteme
armasuisse Bundesamt für Landestopografie swisstopo Bereich GPS - Aktueller Stand und künftige Potentiale Informationstagung Landtechnik 2009 13. Oktober 2009, Tänikon U. Wild Agenda Satellitensysteme
Trajektorienbestimmung im Skisprung
 Dipl.-Ing. Petra Hafner Steyrergasse 30, 8010 Graz Trajektorienbestimmung im Skisprung P. Hafner M. Wieser N. Kühtreiber B. Wiesenhofer C. Abart B. Hofmann-Wellenhof (INAS) T. Nunner G. Paar (Joanneum
Dipl.-Ing. Petra Hafner Steyrergasse 30, 8010 Graz Trajektorienbestimmung im Skisprung P. Hafner M. Wieser N. Kühtreiber B. Wiesenhofer C. Abart B. Hofmann-Wellenhof (INAS) T. Nunner G. Paar (Joanneum
Grundlagen GPS. Copyright by Compass Yachtzubehör
 Grundlagen GPS Was bedeutet GPS? Wofür wurde GPS entwickelt? Geschichtlicher Rückblick Aufbau des Satelliten Systems Funktionsweise des GPS-Systems Genauigkeit des GPS Systems und deren Faktoren WAAS /
Grundlagen GPS Was bedeutet GPS? Wofür wurde GPS entwickelt? Geschichtlicher Rückblick Aufbau des Satelliten Systems Funktionsweise des GPS-Systems Genauigkeit des GPS Systems und deren Faktoren WAAS /
Neue Entwicklungen in der GNSS Technik
 Neue Entwicklungen in der GNSS Technik SONDIERUNG VERMESSUNG ABSTECKUNG ili gis-services Hersteller-unabhängiges Ingenieurbüro seit über 15 Jahren Maßgeschneiderte Hard- und Softwarekombinationen namhafter
Neue Entwicklungen in der GNSS Technik SONDIERUNG VERMESSUNG ABSTECKUNG ili gis-services Hersteller-unabhängiges Ingenieurbüro seit über 15 Jahren Maßgeschneiderte Hard- und Softwarekombinationen namhafter
> Vortrag > Anja Heßelbarth GNSS in der Hydrographie GNSS in der Hydrographie. Anja Heßelbarth, Deutsches Zentrum für Luft- und Raumfahrt
 DLR.de Folie 1 GNSS in der Hydrographie Anja Heßelbarth, Deutsches Zentrum für Luft- und Raumfahrt DLR.de Folie 2 Motivation GNSS als Basis hydrographischer Messsysteme Vertikale Genauigkeit oft entscheidend
DLR.de Folie 1 GNSS in der Hydrographie Anja Heßelbarth, Deutsches Zentrum für Luft- und Raumfahrt DLR.de Folie 2 Motivation GNSS als Basis hydrographischer Messsysteme Vertikale Genauigkeit oft entscheidend
RIWA Anwendertreffen 2014 GPS, GNSS, Genauigkeiten, Lösungen
 RIWA Anwendertreffen 2014 GPS, GNSS, Genauigkeiten, Lösungen PPM GmbH DIE PPM GMBH - gegründet 1998 - ist ein Handels- und Dienstleistungsunternehmen mit Sitz im oberbayrischen Penzberg. DIE PPM GMBH VERSTEHT
RIWA Anwendertreffen 2014 GPS, GNSS, Genauigkeiten, Lösungen PPM GmbH DIE PPM GMBH - gegründet 1998 - ist ein Handels- und Dienstleistungsunternehmen mit Sitz im oberbayrischen Penzberg. DIE PPM GMBH VERSTEHT
GLONASS Single Difference Phase Biases. Heinz Habrich, Peter Neumaier Bundesamt für Kartographie und Geodäsie, Frankfurt am Main
 GLONASS Single Difference Phase Biases Heinz Habrich, Peter Neumaier Bundesamt für Kartographie und Geodäsie, Frankfurt am Main Inhalt und Übersicht Betrachtung von Phasen - Biases hervorgerufen durch
GLONASS Single Difference Phase Biases Heinz Habrich, Peter Neumaier Bundesamt für Kartographie und Geodäsie, Frankfurt am Main Inhalt und Übersicht Betrachtung von Phasen - Biases hervorgerufen durch
Sensors4All Workshop III. Mobile Sensoren. Kontakt: 1
 Sensors4All Workshop III Mobile Sensoren Kontakt: a.hecke@fh-kaernten.at 1 Agenda Begrüßung GPS Einführung Mobile Sensoren Mobile Messkampagne Schallpegel St.Magdalen Verarbeitung/Analyse der Daten 2 GPS
Sensors4All Workshop III Mobile Sensoren Kontakt: a.hecke@fh-kaernten.at 1 Agenda Begrüßung GPS Einführung Mobile Sensoren Mobile Messkampagne Schallpegel St.Magdalen Verarbeitung/Analyse der Daten 2 GPS
Korrektursignale. Differential GPS (DGPS) erreicht durch den Einsatz von Korrektursignalen eine höhere Genauigkeit.
 erreicht durch den Einsatz von Korrektursignalen eine höhere Genauigkeit.") GPS-Genauigkeit: Herkömmliche GPS-Daten ermöglichen eine Genauigkeit von +/- 10 Metern àdas ist für landwirtschaftliche Arbeiten nicht genau genug! Ionosphäre 200 km Troposphäre 50 km Differential GPS
GPS-Genauigkeit: Herkömmliche GPS-Daten ermöglichen eine Genauigkeit von +/- 10 Metern àdas ist für landwirtschaftliche Arbeiten nicht genau genug! Ionosphäre 200 km Troposphäre 50 km Differential GPS
GNSS-Positionierung auf offener See
 FAMOS 2 nd Phase GNSS-Positionierung auf offener See Kerstin Binder, Gunter Liebsch, Axel Rülke Bundesamt für Kartographie und Geodäsie Frankfurt am Main und Leipzig Gliederung 1. Positionierungskonzepte
FAMOS 2 nd Phase GNSS-Positionierung auf offener See Kerstin Binder, Gunter Liebsch, Axel Rülke Bundesamt für Kartographie und Geodäsie Frankfurt am Main und Leipzig Gliederung 1. Positionierungskonzepte
Die Vorteile des Einsatzes mehrerer GNSS. Karen von Hünerbein
 Die Vorteile des Einsatzes mehrerer GNSS Global Navigation Satellite System bei der Flugzeugnavigation im Alpenraum Karen von Hünerbein www.lange-electronic.de Gliederung o Welche GNSS gibt es? o Wozu
Die Vorteile des Einsatzes mehrerer GNSS Global Navigation Satellite System bei der Flugzeugnavigation im Alpenraum Karen von Hünerbein www.lange-electronic.de Gliederung o Welche GNSS gibt es? o Wozu
Aktuelle Trends in der satellitengestützten Positionierung
 GEOMATIK News 2014 Aktuelle Trends in der satellitengestützten Positionierung B. Richter, Business Director GNSS Leica Geosystems AG, Schweiz 12. November 2014 Inhalt 1. GPS Modernisierung 2. GLONASS Modernisierung
GEOMATIK News 2014 Aktuelle Trends in der satellitengestützten Positionierung B. Richter, Business Director GNSS Leica Geosystems AG, Schweiz 12. November 2014 Inhalt 1. GPS Modernisierung 2. GLONASS Modernisierung
Improving the Accuracy of GPS
 Improving the Accuracy of GPS Stephan Kopf, Thomas King, Wolfgang Effelsberg Lehrstuhl für Praktische Informatik IV Universität Mannheim Gliederung Motivation ierungsfehler von GPS Steigerung der Genauigkeit
Improving the Accuracy of GPS Stephan Kopf, Thomas King, Wolfgang Effelsberg Lehrstuhl für Praktische Informatik IV Universität Mannheim Gliederung Motivation ierungsfehler von GPS Steigerung der Genauigkeit
Sicherungspolitik GEOSOFT. Autor: Michael Schulz, GEO
 Nur die Satelliten vom Typ Block I standen jedem Nutzer mit voller Systemgenauigkeit zur Verfügung. Durch künstliche Systemverschlechterung gestattet der Systembetreiber dem nicht autorisiertem Nutzer
Nur die Satelliten vom Typ Block I standen jedem Nutzer mit voller Systemgenauigkeit zur Verfügung. Durch künstliche Systemverschlechterung gestattet der Systembetreiber dem nicht autorisiertem Nutzer
Kleine Rückblende. Für unsere Zwecke gab bzw. gibt es dazu im Wesentlichen drei Möglichkeiten:
 Kleine Rückblende Wir beschäftigen uns mit Geodaten. Diese haben die Eigenschaften verortet und räumlich verteilt und bestehen aus Geometrie- und Sachinformationen. Man könnte also fragen was? und wo?.
Kleine Rückblende Wir beschäftigen uns mit Geodaten. Diese haben die Eigenschaften verortet und räumlich verteilt und bestehen aus Geometrie- und Sachinformationen. Man könnte also fragen was? und wo?.
Kooperative Positionierung von Verkehrsteilnehmern auf Basis von GNSS, LiDaRund IEEE p. 14. VIMOS-Symposium November 2018, Dresden
 Kooperative Positionierung von Verkehrsteilnehmern auf Basis von GNSS, LiDaRund IEEE 802.11p 14. VIMOS-Symposium 29. - 30. November 2018, Dresden Agenda 1. Motivation 2. Kooperative Positionierung 3. Positionierung
Kooperative Positionierung von Verkehrsteilnehmern auf Basis von GNSS, LiDaRund IEEE 802.11p 14. VIMOS-Symposium 29. - 30. November 2018, Dresden Agenda 1. Motivation 2. Kooperative Positionierung 3. Positionierung
APOS Real Time- DGPS Echtzeitpositionierung mit Submeter - Genauigkeit. Ernst Zahn
 APOS Real Time- DGPS Echtzeitpositionierung mit Submeter - Genauigkeit Ernst Zahn Teilprodukt: APOS Real Time - DGPS APOS: Kurzvorstellung, Chronologie, Status Ergebnisse der DGPS-Testmessungen 2005 Zugang
APOS Real Time- DGPS Echtzeitpositionierung mit Submeter - Genauigkeit Ernst Zahn Teilprodukt: APOS Real Time - DGPS APOS: Kurzvorstellung, Chronologie, Status Ergebnisse der DGPS-Testmessungen 2005 Zugang
ALEGRO. Aufbau eines lokalen maritimen Ergänzungssystems zur Unterstützung hochpräziser Galileo-Anwendungen und Dienste im Forschungshafen Rostock
 ALEGRO Aufbau eines lokalen maritimen Ergänzungssystems zur Unterstützung hochpräziser Galileo-Anwendungen und Dienste im Forschungshafen Rostock E. Engler, Ch. Gassel, T. Noack, S. Schlüter DLR IKN Page
ALEGRO Aufbau eines lokalen maritimen Ergänzungssystems zur Unterstützung hochpräziser Galileo-Anwendungen und Dienste im Forschungshafen Rostock E. Engler, Ch. Gassel, T. Noack, S. Schlüter DLR IKN Page
Galileo, GNSS, EGNOS und WAAS - Neues aus der Welt der Satellitennavigation
 Galileo, GNSS, EGNOS und WAAS - Neues aus der Welt der Satellitennavigation 47. Weinheimer UKW-Tagung 2002, Weinheim Dipl.-Ing. Erich H. Franke DK6II Königsbach-Stein erich.franke@afusoft.com September
Galileo, GNSS, EGNOS und WAAS - Neues aus der Welt der Satellitennavigation 47. Weinheimer UKW-Tagung 2002, Weinheim Dipl.-Ing. Erich H. Franke DK6II Königsbach-Stein erich.franke@afusoft.com September
Einfluss nicht-gezeiten-bedingter Auflasteffekte durch Atmosphäre, Ozean und Hydrologie auf globale GNSS-Lösungen
 Einfluss nicht-gezeiten-bedingter Auflasteffekte durch Atmosphäre, Ozean und Hydrologie auf globale GNSS-Lösungen S. Franke (1), Ole Roggenbuck (1), D. Thaller (2), R. Dach (3), P. Steigenberger (4) (1)
Einfluss nicht-gezeiten-bedingter Auflasteffekte durch Atmosphäre, Ozean und Hydrologie auf globale GNSS-Lösungen S. Franke (1), Ole Roggenbuck (1), D. Thaller (2), R. Dach (3), P. Steigenberger (4) (1)
GLONASS: das russische Pendant von GPS
 Hochschule für Technik Rapperswil 6. Januar 2010 Inhaltsverzeichnis Überblick Navigationsnachricht Vergleich der Satellitensignale Beispiele von GLONASS-Empfängern Zukunft von GLONASS 1 Vergleich zwischen
Hochschule für Technik Rapperswil 6. Januar 2010 Inhaltsverzeichnis Überblick Navigationsnachricht Vergleich der Satellitensignale Beispiele von GLONASS-Empfängern Zukunft von GLONASS 1 Vergleich zwischen
GNSS Empfänger in der Vermessung und der Nutzen von GNSS Modernisierung
 GNSS Empfänger in der Vermessung und der Nutzen von GNSS Modernisierung Bernhard Richter, GNSS Business Direktor 11, Oktober 2016 Teil von GNSS Modernisierung seit 1990 Erst jetzt zeigt BeiDou und Galileo
GNSS Empfänger in der Vermessung und der Nutzen von GNSS Modernisierung Bernhard Richter, GNSS Business Direktor 11, Oktober 2016 Teil von GNSS Modernisierung seit 1990 Erst jetzt zeigt BeiDou und Galileo
Genauigkeitsanalyse der SAPOS
 Genauigkeitsanalyse der SAPOS -Dienste HEPS mit FKP und VRS im Vergleich zu ViGO von M. Bäumker, H. Horn, J. Schröder 3. SAPOS -Nutzerforum 2004 Köln, Düsseldorf, Arnsberg, Detmold, Münster,, 27.9.-1.10.
Genauigkeitsanalyse der SAPOS -Dienste HEPS mit FKP und VRS im Vergleich zu ViGO von M. Bäumker, H. Horn, J. Schröder 3. SAPOS -Nutzerforum 2004 Köln, Düsseldorf, Arnsberg, Detmold, Münster,, 27.9.-1.10.
GNSS in der Luftfahrt
 GNSS in der Luftfahrt Galileo Applications Day, 2. Mai 2007, Wien Dr. Werner Langhans, Austro Control GmbH 1 DIESER TEXT DIENT DER NAVIGATION Inhalt Bedeutung der Navigation für die Luftfahrt Anwendungen
GNSS in der Luftfahrt Galileo Applications Day, 2. Mai 2007, Wien Dr. Werner Langhans, Austro Control GmbH 1 DIESER TEXT DIENT DER NAVIGATION Inhalt Bedeutung der Navigation für die Luftfahrt Anwendungen
DGPS Dienst. der WSV FACHSTELLE DER WSV FÜR VERKEHRSTECHNIKEN. MW-DGPS-Referenzsystem nach IALA Standard an der deutschen Küste
 WASSER- UND SCHIFFFAHRTSVERWALTUNG DES BUNDES FACHSTELLE DER WSV DGPS Dienst der WSV MW-DGPS-Referenzsystem nach IALA Standard Helgoland Zeven Groß Mohrdorf Autor: Dipl.-Ing. (FH) Michael Hoppe Tel.: 0261-9819-2221
WASSER- UND SCHIFFFAHRTSVERWALTUNG DES BUNDES FACHSTELLE DER WSV DGPS Dienst der WSV MW-DGPS-Referenzsystem nach IALA Standard Helgoland Zeven Groß Mohrdorf Autor: Dipl.-Ing. (FH) Michael Hoppe Tel.: 0261-9819-2221
railgate Galileo-Testgebiet für Schienenfahrzeug-Anwendungen Dipl.-Ing. Thomas Engelhardt
 railgate Galileo-Testgebiet für Schienenfahrzeug-Anwendungen Dipl.-Ing. Thomas Engelhardt Institut für Regelungstechnik 19.09.2014 Vortragsinhalte Satellitennavigationssystem Galileo Forschungsprojekte
railgate Galileo-Testgebiet für Schienenfahrzeug-Anwendungen Dipl.-Ing. Thomas Engelhardt Institut für Regelungstechnik 19.09.2014 Vortragsinhalte Satellitennavigationssystem Galileo Forschungsprojekte
Was passiert in satellitengestützten Referenzstationsnetzen
 Was passiert in satellitengestützten Referenzstationsnetzen Andreas Bagge Geo++ GmbH D-30827 Garbsen www.geopp.de Inhalt Zielsetzung eines Referenznetzes GNSS Grundprinzip GNSS Fehlerquellen Differentielles
Was passiert in satellitengestützten Referenzstationsnetzen Andreas Bagge Geo++ GmbH D-30827 Garbsen www.geopp.de Inhalt Zielsetzung eines Referenznetzes GNSS Grundprinzip GNSS Fehlerquellen Differentielles
DGPS Dienst. der WSV FACHSTELLE DER WSV FÜR VERKEHRSTECHNIKEN. Differential-GPS-Referenzstationen nach IALA Standard im Binnenbereich
 WASSER- UND SCHIFFFAHRTSVERWALTUNG DES BUNDES FACHSTELLE DER WSV DGPS Dienst der WSV Differential-GPS-Referenzstationen nach IALA Standard im Binnenbereich DGPS Radar INS Integrated Navigation System AIS
WASSER- UND SCHIFFFAHRTSVERWALTUNG DES BUNDES FACHSTELLE DER WSV DGPS Dienst der WSV Differential-GPS-Referenzstationen nach IALA Standard im Binnenbereich DGPS Radar INS Integrated Navigation System AIS
IONOSPHÄRISCHE KORREKTUR VON GNSS- EINFREQUENZDATEN MITTELS MULTILAYER MODELL
 IONOSPHÄRISCHE KORREKTUR VON GNSS- EINFREQUENZDATEN MITTELS MULTILAYER MODELL NINA MAGNET, ROBERT WEBER DEPARTMENT FÜR GEODÄSIE UND GEOINFORMATION TECHNISCHE UNIVERSITÄT WIEN ANGEWANDTE GEODÄSIE UND GNSS
IONOSPHÄRISCHE KORREKTUR VON GNSS- EINFREQUENZDATEN MITTELS MULTILAYER MODELL NINA MAGNET, ROBERT WEBER DEPARTMENT FÜR GEODÄSIE UND GEOINFORMATION TECHNISCHE UNIVERSITÄT WIEN ANGEWANDTE GEODÄSIE UND GNSS
Präzise Einfrequenz-Positionierung mit dem Galileo E5 Breitbandsignal
 Präzise Einfrequenz-Positionierung mit dem Galileo E5 Breitbandsignal Geodätische Woche 2011 / InterGEO Nürnberg 28. September 2011 Ing. habil. Torben Schüler Stefan Junker Herman Diessongo Prof. Dr.-Ing.
Präzise Einfrequenz-Positionierung mit dem Galileo E5 Breitbandsignal Geodätische Woche 2011 / InterGEO Nürnberg 28. September 2011 Ing. habil. Torben Schüler Stefan Junker Herman Diessongo Prof. Dr.-Ing.
Der Einfluss der Security auf die Safety bei satellitenbasierten Ortungssystemen
 Der Einfluss der Security auf die Safety bei satellitenbasierten Ortungssystemen Dr. Michael Meyer zu Hörste, DLR Institut für Verkehrssystemtechnik Workshop Safety in Transport 2011 Inhalt 1. Arbeitsweise
Der Einfluss der Security auf die Safety bei satellitenbasierten Ortungssystemen Dr. Michael Meyer zu Hörste, DLR Institut für Verkehrssystemtechnik Workshop Safety in Transport 2011 Inhalt 1. Arbeitsweise
IHK. Satellitennavigation. GPS, GLONASS und GALILEO. von Dr.-Ing. Gerhard H. Schildt o.univ.-professor an der Technischen Universität Wien
 Satellitennavigation GPS, GLONASS und GALILEO von Dr.-Ing. Gerhard H. Schildt o.univ.-professor an der Technischen Universität Wien IHK V M i INFORMATIONSTECHNIK INFO INHALTSVERZEICHNIS Vorwort 5 1 Physikalische
Satellitennavigation GPS, GLONASS und GALILEO von Dr.-Ing. Gerhard H. Schildt o.univ.-professor an der Technischen Universität Wien IHK V M i INFORMATIONSTECHNIK INFO INHALTSVERZEICHNIS Vorwort 5 1 Physikalische
Produktdefinition LFPS Landwirtschaftlicher Fahrzeugpositionierungsservice Bayern
 Landesamt für Digitalisierung, Breitband und Vermessung Produktdefinition LFPS Landwirtschaftlicher Fahrzeugpositionierungsservice Bayern Version 1.0 2 1 Allgemeine Beschreibung des Landwirtschaftlichen
Landesamt für Digitalisierung, Breitband und Vermessung Produktdefinition LFPS Landwirtschaftlicher Fahrzeugpositionierungsservice Bayern Version 1.0 2 1 Allgemeine Beschreibung des Landwirtschaftlichen
GNSS Empfänger in einem dynamischen Geschäftsumfeld
 GNSS Empfänger in einem dynamischen Geschäftsumfeld Bernhard Richter, GNSS Programmdirektor, Leica Geosystems AG 19. Jänner 2017 Teil von Glonass 30 25 Number of GNSS satellites 20 15 10 GLONASS 5 0 Vollausbau
GNSS Empfänger in einem dynamischen Geschäftsumfeld Bernhard Richter, GNSS Programmdirektor, Leica Geosystems AG 19. Jänner 2017 Teil von Glonass 30 25 Number of GNSS satellites 20 15 10 GLONASS 5 0 Vollausbau
Global Positioning System (GPS)
") Global Positioning System (GPS) - Beispiel für Anwendungen präziser Zeitmessung Genaue Orts- Geschwindigkeits- und Zeitinformation Unbegrenzte Zahl von Nutzern Weltweite Verfügbarkeit GPS - Segmente GPS
Global Positioning System (GPS) - Beispiel für Anwendungen präziser Zeitmessung Genaue Orts- Geschwindigkeits- und Zeitinformation Unbegrenzte Zahl von Nutzern Weltweite Verfügbarkeit GPS - Segmente GPS
GNSS-basierte Ortungs- und Navigationsverfahren für maritime Safety of Life Anwendungen
 GNSS-basierte Ortungs- und Navigationsverfahren für maritime Safety of Life Anwendungen E. Engler, J. Beckheinrich,, A. Hirrle, D. Klähn, T. Noack, R. Reimer, S. Schlüter Deutsches Zentrum für Luft- und
GNSS-basierte Ortungs- und Navigationsverfahren für maritime Safety of Life Anwendungen E. Engler, J. Beckheinrich,, A. Hirrle, D. Klähn, T. Noack, R. Reimer, S. Schlüter Deutsches Zentrum für Luft- und
Positionsbestimmung mit GPS-Satelliten
 Bild 5.7_1 Das satellitengestützte Radionavigationssystem NAVSTAR GPS (NAVigation System with Time And Ranging Global Positioning System) wird seit 1973 im Auftrag des US-Verteidigungministeriums (Department
Bild 5.7_1 Das satellitengestützte Radionavigationssystem NAVSTAR GPS (NAVigation System with Time And Ranging Global Positioning System) wird seit 1973 im Auftrag des US-Verteidigungministeriums (Department
Anforderungen an den Netzanschluss Mit GNSS-Messungen immer im amtlichen Bezugssystem!
 Anforderungen an den Netzanschluss Mit GNSS-Messungen immer im amtlichen Bezugssystem! 1 Anschluss an das Koordinatenreferenzsystem ETRS89/UTM Über dauerhaft vermarkte AP, temporäre AP oder TP, die in
Anforderungen an den Netzanschluss Mit GNSS-Messungen immer im amtlichen Bezugssystem! 1 Anschluss an das Koordinatenreferenzsystem ETRS89/UTM Über dauerhaft vermarkte AP, temporäre AP oder TP, die in
Auswirkung der steigenden Sonnenaktivität auf die Performance von SAPOS HEPS Messungen
 Auswirkung der steigenden Sonnenaktivität auf die Performance von SAPOS HEPS Messungen 1. Grundlegende Zusammenhänge Wie Abb. 1 verdeutlicht, nähert sich die Sonnenaktivität zurzeit im Rahmen eines ca.
Auswirkung der steigenden Sonnenaktivität auf die Performance von SAPOS HEPS Messungen 1. Grundlegende Zusammenhänge Wie Abb. 1 verdeutlicht, nähert sich die Sonnenaktivität zurzeit im Rahmen eines ca.
GPS (Global Positioning System)
") GPS (Global Positioning System) HF-Praktikum Referat von : Sabine Sories Thomas Schmitz Tobias Weling Inhalt: - Geschichte - Prinzip - Fehlerquellen - Zukünftige Systeme 1 GPS (Global Positioning System)
GPS (Global Positioning System) HF-Praktikum Referat von : Sabine Sories Thomas Schmitz Tobias Weling Inhalt: - Geschichte - Prinzip - Fehlerquellen - Zukünftige Systeme 1 GPS (Global Positioning System)
Funktionsweise und Status Globaler Navigationssatellitensysteme (GNSS)
") Funktionsweise und Status Globaler Navigationssatellitensysteme (GNSS) Dr. E. Engler DLR, Institut für Kommunikation und Navigation Folie 1 Inhalt GNSS: Funktionsweise, Messprinzipien, Messfehler und Qualitätskenngrößen
Funktionsweise und Status Globaler Navigationssatellitensysteme (GNSS) Dr. E. Engler DLR, Institut für Kommunikation und Navigation Folie 1 Inhalt GNSS: Funktionsweise, Messprinzipien, Messfehler und Qualitätskenngrößen
GPS Grundlagen 1. Das Satellitenpositionierungssystem GPS besteht aus 3 Bestandteilen (Segmenten):
:") GPS Grundlagen 1 Grundlagen Hinweis: Die Graphiken sind der Internetseite von Frank Woessner (www.kowoma.de), der Internetseite von http://global.trimble.com und dem Vortrag GPS-Grundlagen (Vortrag von
GPS Grundlagen 1 Grundlagen Hinweis: Die Graphiken sind der Internetseite von Frank Woessner (www.kowoma.de), der Internetseite von http://global.trimble.com und dem Vortrag GPS-Grundlagen (Vortrag von
Kapitel 7. Crossvalidation
 Kapitel 7 Crossvalidation Wie im Kapitel 5 erwähnt wurde, ist die Crossvalidation die beste Technik, womit man die Genauigkeit der verschiedenen Interpolationsmethoden überprüft. In diesem Kapitel wurde
Kapitel 7 Crossvalidation Wie im Kapitel 5 erwähnt wurde, ist die Crossvalidation die beste Technik, womit man die Genauigkeit der verschiedenen Interpolationsmethoden überprüft. In diesem Kapitel wurde
Positionsbestimmung und GPS
 Positionsbestimmung und GPS Das Geoid eine Annäherung der Erdgestalt Ellispoidparameter O Oder Abplattung f = (a-b)/a Bezugsellipsoide - Bespiele Ellipsoidische Koordinaten Länge ( ), Breite ( ) Einheiten:
Positionsbestimmung und GPS Das Geoid eine Annäherung der Erdgestalt Ellispoidparameter O Oder Abplattung f = (a-b)/a Bezugsellipsoide - Bespiele Ellipsoidische Koordinaten Länge ( ), Breite ( ) Einheiten:
Vermessung und Ortung mit Satelliten
 Vermessung und Ortung mit Satelliten GPS und andere satellitengestützte Navigationssysteme von Manfred Bauer 1. Auflage Vermessung und Ortung mit Satelliten Bauer schnell und portofrei erhältlich bei beck-shop.de
Vermessung und Ortung mit Satelliten GPS und andere satellitengestützte Navigationssysteme von Manfred Bauer 1. Auflage Vermessung und Ortung mit Satelliten Bauer schnell und portofrei erhältlich bei beck-shop.de
Gemeinsame Nutzung von GPS und GLONASS im Satellitenpositionierungsdienst
 Martin Floth, Wilfried Korth Gemeinsame Nutzung von GPS und GLONASS im Satellitenpositionierungsdienst SAPOS Mit der Verfügbarkeit weiterer GLONASS-Satelliten streben die Bundesländer sukzessiv an, den
Martin Floth, Wilfried Korth Gemeinsame Nutzung von GPS und GLONASS im Satellitenpositionierungsdienst SAPOS Mit der Verfügbarkeit weiterer GLONASS-Satelliten streben die Bundesländer sukzessiv an, den
Kartieren mit GPS. Technologie, Anwendung, Innovation. Klagenfurt, 27. Mai Dr.techn. Ekkehart Grillmayer.
 Kartieren mit GPS Technologie, Anwendung, Innovation Klagenfurt, 27. Mai 2010 Dr.techn. Ekkehart Grillmayer Motivation 1 25.05.2010 GPS Genauigkeitsspektrum Glühbirne Scheinwerfer Laser GPS Navigation
Kartieren mit GPS Technologie, Anwendung, Innovation Klagenfurt, 27. Mai 2010 Dr.techn. Ekkehart Grillmayer Motivation 1 25.05.2010 GPS Genauigkeitsspektrum Glühbirne Scheinwerfer Laser GPS Navigation
Mittelwert, Standardabweichung, Median und Bereich für alle durchgeführten Messungen (in Prozent)
") 3. Ergebnisse 3.1 Kennwerte, Boxplot Die Kennwerte der deskriptiven Statistik sind in der Tabelle 1 für alle Messungen, in der Tabelle 2 für die Messungen, bei denen mit der Referenzmethode eine festgestellt
3. Ergebnisse 3.1 Kennwerte, Boxplot Die Kennwerte der deskriptiven Statistik sind in der Tabelle 1 für alle Messungen, in der Tabelle 2 für die Messungen, bei denen mit der Referenzmethode eine festgestellt
Robert Weber Institut f. Geodäsie und Geophysik Navigation-Entwicklung und Perspektiven, 3. Feb. 2009, TU-Wien
 Nutzung von GPS/GLONASS Empfängern im innerstädtischen Bereich Robert Weber Institut f. Geodäsie und Geophysik Navigation-Entwicklung und Perspektiven, 3. Feb. 2009, TU-Wien Agenda * Status GPS/GLONASS
Nutzung von GPS/GLONASS Empfängern im innerstädtischen Bereich Robert Weber Institut f. Geodäsie und Geophysik Navigation-Entwicklung und Perspektiven, 3. Feb. 2009, TU-Wien Agenda * Status GPS/GLONASS
u-blox NEO-6P Messgenauigkeit
 OptimalKode @ OptimalSystem Software- und Systementwicklung sowie Datendienste auf dem Gebiet der Agrar-, Geo- und Umweltinformatik u-blox NEO-6P Messgenauigkeit Durchführung und Auswertung einer Messreihe
OptimalKode @ OptimalSystem Software- und Systementwicklung sowie Datendienste auf dem Gebiet der Agrar-, Geo- und Umweltinformatik u-blox NEO-6P Messgenauigkeit Durchführung und Auswertung einer Messreihe
Hinweise zur Nutzung des SAPOS in Nordrhein-Westfalen. SAPOS -Dienste. Stand: 1. Januar 2017
 Hinweise zur Nutzung des SAPOS in Nordrhein-Westfalen Stand: 1. Januar 2017 SAPOS -Dienste Der Satellitenpositionierungsdienst der deutschen Landesvermessung SAPOS stellt durch ein Netz von permanent registrierenden
Hinweise zur Nutzung des SAPOS in Nordrhein-Westfalen Stand: 1. Januar 2017 SAPOS -Dienste Der Satellitenpositionierungsdienst der deutschen Landesvermessung SAPOS stellt durch ein Netz von permanent registrierenden
Übungsaufgabe Parameter und Verteilungsschätzung
 Übungsaufgabe Parameter und Verteilungsschätzung Prof. Dr. rer. nat. Lüders Datum: 21.01.2019 Autor: Marius Schulte Matr.-Nr.: 10049060 FH Südwestfalen Aufgabenstellung Analysiert werden sollen die Verteilungen
Übungsaufgabe Parameter und Verteilungsschätzung Prof. Dr. rer. nat. Lüders Datum: 21.01.2019 Autor: Marius Schulte Matr.-Nr.: 10049060 FH Südwestfalen Aufgabenstellung Analysiert werden sollen die Verteilungen
Online Produktmeeting - Nr. 2. GPS und Korrektursignale
 Online Produktmeeting - Nr. 2 GPS und Korrektursignale 1 Was ist GNSS Ein globales Navigationssatellitensystem (Global Navigation Satellite System) oder GNSS ist ein System zur Positionsbestimmung und
Online Produktmeeting - Nr. 2 GPS und Korrektursignale 1 Was ist GNSS Ein globales Navigationssatellitensystem (Global Navigation Satellite System) oder GNSS ist ein System zur Positionsbestimmung und
Galileo startet in die Zukunft
 Galileo startet in die Zukunft Elisabeth Fischer 08.11.2011 Startschuss für europäisches Navi-System "Galileo" Es galt ursprünglich als eines der ehrgeizigsten und wichtigsten Technologieprojekte Europas.
Galileo startet in die Zukunft Elisabeth Fischer 08.11.2011 Startschuss für europäisches Navi-System "Galileo" Es galt ursprünglich als eines der ehrgeizigsten und wichtigsten Technologieprojekte Europas.
Entwicklung der Messtechnik am Beispiel von hochpräziser RTK-Positionierung mittels Galileo
 Geodäsie 4.0 - was erwartet uns Geodäten? Entwicklung der Messtechnik am Beispiel von hochpräziser RTK-Positionierung mittels Galileo Xiaoguang Luo Leica Geosystems AG, Heerbrugg Seminar an der HFT Stuttgart,
Geodäsie 4.0 - was erwartet uns Geodäten? Entwicklung der Messtechnik am Beispiel von hochpräziser RTK-Positionierung mittels Galileo Xiaoguang Luo Leica Geosystems AG, Heerbrugg Seminar an der HFT Stuttgart,
1 Messfehler. 1.1 Systematischer Fehler. 1.2 Statistische Fehler
 1 Messfehler Jede Messung ist ungenau, hat einen Fehler. Wenn Sie zum Beispiel die Schwingungsdauer eines Pendels messen, werden Sie - trotz gleicher experimenteller Anordnungen - unterschiedliche Messwerte
1 Messfehler Jede Messung ist ungenau, hat einen Fehler. Wenn Sie zum Beispiel die Schwingungsdauer eines Pendels messen, werden Sie - trotz gleicher experimenteller Anordnungen - unterschiedliche Messwerte
Vermessung und Ortung mit Satelliten
 Manfred Bauer Vermessung und Ortung mit Satelliten GPS und andere satellitengestutzte Navigationssysteme Mit Beitragen von Lambert Wanninger 5., neu bearbeitete und erweiterte Auflage Herbert Wichmann
Manfred Bauer Vermessung und Ortung mit Satelliten GPS und andere satellitengestutzte Navigationssysteme Mit Beitragen von Lambert Wanninger 5., neu bearbeitete und erweiterte Auflage Herbert Wichmann
Aktuelle Entwicklungen in der satellitengestützten Positionierung GNSS - RTCM - RTK. Dr. Werner Lienhart
 Aktuelle Entwicklungen in der satellitengestützten Positionierung GNSS - RTCM - RTK Dr. Werner Lienhart Inhalt Aktueller Stand von GNSS RTCM - derzeitige und kommende Messages SmartRTK - Leica s neuer
Aktuelle Entwicklungen in der satellitengestützten Positionierung GNSS - RTCM - RTK Dr. Werner Lienhart Inhalt Aktueller Stand von GNSS RTCM - derzeitige und kommende Messages SmartRTK - Leica s neuer
3.5 VERORTUNG DER UNTERNEHMEN DER NEW ECONOMY
 3.5 VERORTUNG DER UNTERNEHMEN DER NEW ECONOMY 3.5.1 Datengrundlagen Für die räumliche Analyse der New Economy Unternehmen mit Hilfe von ArcView wurde eine Auswahl von abbildbaren Standortfaktoren getroffen.
3.5 VERORTUNG DER UNTERNEHMEN DER NEW ECONOMY 3.5.1 Datengrundlagen Für die räumliche Analyse der New Economy Unternehmen mit Hilfe von ArcView wurde eine Auswahl von abbildbaren Standortfaktoren getroffen.
SWACI ein neuer Ionosphären-Wetterdienst
 SWACI ein neuer Ionosphären-Wetterdienst N. Jakowski, S. Stankov, C. Mayer, C. Becker, S. Schlüter Deutsches Zentrum für Luft- und Raumfahrt e.v. (DLR), Institut für Kommunikation und Navigation, Neustrelitz,
SWACI ein neuer Ionosphären-Wetterdienst N. Jakowski, S. Stankov, C. Mayer, C. Becker, S. Schlüter Deutsches Zentrum für Luft- und Raumfahrt e.v. (DLR), Institut für Kommunikation und Navigation, Neustrelitz,
(Indoor)-Lokalisation
-Lokalisation") (Indoor)-Lokalisation Mathias Pelka http://www.cosa.fh-luebeck.de 19.05.2014 2014 Forschung erforschen 1 Global Positioning System (NAVSTAR GPS) Ermöglicht die Positionsbestimmung Zwei Frequenzen (L1,
(Indoor)-Lokalisation Mathias Pelka http://www.cosa.fh-luebeck.de 19.05.2014 2014 Forschung erforschen 1 Global Positioning System (NAVSTAR GPS) Ermöglicht die Positionsbestimmung Zwei Frequenzen (L1,
Precise Point Positioning (PPP) in Hinblick auf Echtzeitanwendungen
 in Hinblick auf Echtzeitanwendungen") Katrin Huber Institut für Navigation Technische Universität Graz katrin.huber@tugraz.at Precise Point Positioning (PPP) in Hinblick auf Echtzeitanwendungen 8. November 0 Übersicht PPP Grundlagen INAS PPP
Katrin Huber Institut für Navigation Technische Universität Graz katrin.huber@tugraz.at Precise Point Positioning (PPP) in Hinblick auf Echtzeitanwendungen 8. November 0 Übersicht PPP Grundlagen INAS PPP
Mathematisch-Naturwissenschaftliche Fakultät I der Humboldt-Universität zu Berlin Institut für Physik Physikalisches Grundpraktikum.
 Mathematisch-Naturwissenschaftliche Fakultät I der Humboldt-Universität zu Berlin Institut für Physik Physikalisches Grundpraktikum Versuchsprotokoll zur Bestimmung der Brennweiten von dünnen Linsen (O)
Mathematisch-Naturwissenschaftliche Fakultät I der Humboldt-Universität zu Berlin Institut für Physik Physikalisches Grundpraktikum Versuchsprotokoll zur Bestimmung der Brennweiten von dünnen Linsen (O)
Möglichkeiten und Grenzen der Satellitennavigation in urbanen Schienennetzen
 Keeping on Track - GNSS 1 / 18 Möglichkeiten und Grenzen der Satellitennavigation in urbanen Schienennetzen Bernhard Ömer Austrian Research Centers in Zusammenarbeit mit den Wiener Linien e-mail: bernhard.oemer@arcs.ac.at
Keeping on Track - GNSS 1 / 18 Möglichkeiten und Grenzen der Satellitennavigation in urbanen Schienennetzen Bernhard Ömer Austrian Research Centers in Zusammenarbeit mit den Wiener Linien e-mail: bernhard.oemer@arcs.ac.at
Satellitennavigation im Verkehr 22. Mai 2007
 Satellitennavigation im Verkehr Günther Kasties Geschäftsführender Gesellschafter OECON GmbH Autor: Dipl. Ing. Günther Kasties Copyright: OECON GmbH 1 Kompetenzen OECON Gruppe OECON Gruppe (www.oecon-line.de)
Satellitennavigation im Verkehr Günther Kasties Geschäftsführender Gesellschafter OECON GmbH Autor: Dipl. Ing. Günther Kasties Copyright: OECON GmbH 1 Kompetenzen OECON Gruppe OECON Gruppe (www.oecon-line.de)
GBAS Neue Technologie für die Luftfahrt
 Andre Biestmann & Stefan Naerlich GBAS Neue Technologie für die Luftfahrt Andre Biestmann & Stefan Naerlich DFS Deutsche Flugsicherung GmbH 44 45 Das Bild zeigt die Flugverläufe an einem verkehrsreichen
Andre Biestmann & Stefan Naerlich GBAS Neue Technologie für die Luftfahrt Andre Biestmann & Stefan Naerlich DFS Deutsche Flugsicherung GmbH 44 45 Das Bild zeigt die Flugverläufe an einem verkehrsreichen
Galileo und Grafarend unterwegs zu GNSS
 Galileo und Grafarend unterwegs zu GNSS B. Hofmann-Wellenhof und P. Berglez Technische Universität Graz Arbeitsgruppe Navigation des Instituts für Geodäsie Kolloquium der Leibniz-Sozietät der Wissenschaften
Galileo und Grafarend unterwegs zu GNSS B. Hofmann-Wellenhof und P. Berglez Technische Universität Graz Arbeitsgruppe Navigation des Instituts für Geodäsie Kolloquium der Leibniz-Sozietät der Wissenschaften
SAPOS-Anwendung im Rechnergestützen Betriebsleitsystem (RBL) der Berliner Verkehrsbetriebe (BVG)
 der Berliner Verkehrsbetriebe (BVG)") SAPOS-Anwendung im Rechnergestützen Betriebsleitsystem (RBL) der Berliner Verkehrsbetriebe (BVG) Berliner Verkehrsbetriebe (BVG) Reinhard Eisenberger November 2008 Inhalt Ziele Ausgangssituation Betriebliche
SAPOS-Anwendung im Rechnergestützen Betriebsleitsystem (RBL) der Berliner Verkehrsbetriebe (BVG) Berliner Verkehrsbetriebe (BVG) Reinhard Eisenberger November 2008 Inhalt Ziele Ausgangssituation Betriebliche
Statistische Untersuchung zum Auftreten von Wind mit 70 -Komponente am Flughafen Frankfurt
 Statistische Untersuchung zum Auftreten von Wind mit 70 -Komponente am Flughafen Frankfurt Dipl.-Meteorol. Thomas Hasselbeck Dipl.-Geogr. Johannes W olf GPM Büro für Geoinformatik, Umweltplanung, neue
Statistische Untersuchung zum Auftreten von Wind mit 70 -Komponente am Flughafen Frankfurt Dipl.-Meteorol. Thomas Hasselbeck Dipl.-Geogr. Johannes W olf GPM Büro für Geoinformatik, Umweltplanung, neue
Observatoriumspraktikum WS 2006/07. Teil 1 CCD-Kamera Dunkelstrombestimmung
 Observatoriumspraktikum WS 2006/07 Teil 1 CCD-Kamera Dunkelstrombestimmung Matr. Nr.: 04000944 Christoph Saulder Theorie Eine CCD (Charge-coupled Device) ist ein Photodetektor, welcher ein Signal, welches
Observatoriumspraktikum WS 2006/07 Teil 1 CCD-Kamera Dunkelstrombestimmung Matr. Nr.: 04000944 Christoph Saulder Theorie Eine CCD (Charge-coupled Device) ist ein Photodetektor, welcher ein Signal, welches
Technische Anwendungen für Differentielles GPS
 Technische Anwendungen für Differentielles GPS Stefan Diener / 08.09.2011 / Seite 1 Was ist GPS? NAVSTAR GPS = "NAVigational Satellite Timing And Ranging - Global Positioning System" System zur Positionsbestimmung
Technische Anwendungen für Differentielles GPS Stefan Diener / 08.09.2011 / Seite 1 Was ist GPS? NAVSTAR GPS = "NAVigational Satellite Timing And Ranging - Global Positioning System" System zur Positionsbestimmung
Universität Stuttgart. TTI GmbH an der Universität Stuttgart Hochfrequenzanwendungen. Exposition durch Handys in realen Situationen
 Universität Stuttgart Exposition durch Handys in realen Situationen Dipl.-Ing. J. Baumann Dipl.-Ing. L. Geisbusch 1 Überblick 1/2 Regelverhalten im GSM-System Funktionsweise Abhängigkeiten SAR-Werte bei
Universität Stuttgart Exposition durch Handys in realen Situationen Dipl.-Ing. J. Baumann Dipl.-Ing. L. Geisbusch 1 Überblick 1/2 Regelverhalten im GSM-System Funktionsweise Abhängigkeiten SAR-Werte bei
8. Statistik Beispiel Noten. Informationsbestände analysieren Statistik
 Informationsbestände analysieren Statistik 8. Statistik Nebst der Darstellung von Datenreihen bildet die Statistik eine weitere Domäne für die Auswertung von Datenbestände. Sie ist ein Fachgebiet der Mathematik
Informationsbestände analysieren Statistik 8. Statistik Nebst der Darstellung von Datenreihen bildet die Statistik eine weitere Domäne für die Auswertung von Datenbestände. Sie ist ein Fachgebiet der Mathematik
Nutzung und Analyse der SAPOS. HEPS für Standard- und Sonderanwendungen
 Nutzung und Analyse der SAPOS -Dienste HEPS für Standard- und Sonderanwendungen von M. Bäumker Ch. Wendt 4. SAPOS -Nutzerforum 2005 Arnsberg, Detmold, Köln, Münster, Düsseldorf 14.11.-18.11. 2005 Übersicht
Nutzung und Analyse der SAPOS -Dienste HEPS für Standard- und Sonderanwendungen von M. Bäumker Ch. Wendt 4. SAPOS -Nutzerforum 2005 Arnsberg, Detmold, Köln, Münster, Düsseldorf 14.11.-18.11. 2005 Übersicht
Satellitenpositionierungsdienst
 SAPOS Dipl.-Ing. Uwe Faulhaber Abteilungsleiter Geodäsie Landesvermessungsamt Baden- 24.04.2008 / Folie 1 Agenda 24.04.2008 / Folie 2 Beispiel amtlicher Dienst SAPOS in der Bundesrepublik SAPOS in Baden-
SAPOS Dipl.-Ing. Uwe Faulhaber Abteilungsleiter Geodäsie Landesvermessungsamt Baden- 24.04.2008 / Folie 1 Agenda 24.04.2008 / Folie 2 Beispiel amtlicher Dienst SAPOS in der Bundesrepublik SAPOS in Baden-
Lage- und Streuungsparameter
 Lage- und Streuungsparameter Beziehen sich auf die Verteilung der Ausprägungen von intervall- und ratio-skalierten Variablen Versuchen, diese Verteilung durch Zahlen zu beschreiben, statt sie graphisch
Lage- und Streuungsparameter Beziehen sich auf die Verteilung der Ausprägungen von intervall- und ratio-skalierten Variablen Versuchen, diese Verteilung durch Zahlen zu beschreiben, statt sie graphisch
Qualitätsuntersuchung photogrammetrischer Matchingverfahren mit Schrägluftbildern. Helge Olberding, Jurij Schmik
 Qualitätsuntersuchung photogrammetrischer Matchingverfahren mit Schrägluftbildern Helge Olberding, Jurij Schmik 16. Oldenburger 3D-Tage, 01.02. - 02.02.2017 INHALT Motivation Datengrundlage Luftbilder
Qualitätsuntersuchung photogrammetrischer Matchingverfahren mit Schrägluftbildern Helge Olberding, Jurij Schmik 16. Oldenburger 3D-Tage, 01.02. - 02.02.2017 INHALT Motivation Datengrundlage Luftbilder
Arbeiten in einem virtuellen Festpunktfeld Erfahrungen aus zwei Geodäsieübungen
 4. Vermessungsingenieurtag an der HfT Arbeiten in einem virtuellen Festpunktfeld Erfahrungen aus zwei Geodäsieübungen Dipl.-Ing. (FH) Jörg Hepperle HfT, Schellingstraße 24, 70174 Tel. 0711/121-2604, Fax
4. Vermessungsingenieurtag an der HfT Arbeiten in einem virtuellen Festpunktfeld Erfahrungen aus zwei Geodäsieübungen Dipl.-Ing. (FH) Jörg Hepperle HfT, Schellingstraße 24, 70174 Tel. 0711/121-2604, Fax
Neue Möglichkeiten mit GPS, GLONASS, Galileo. Dipl.-Ing. Jürgen Alberding EuroNav Service GmbH Lilienthalstr. 3B Schönefeld (b.
 Neue Möglichkeiten mit GPS, GLONASS, Galileo Dipl.-Ing. Jürgen Alberding EuroNav Service GmbH Lilienthalstr. 3B 12529 Schönefeld (b. Berlin) Überblick GPS und dessen Weiterentwicklung GLONASS Ausbaustand
Neue Möglichkeiten mit GPS, GLONASS, Galileo Dipl.-Ing. Jürgen Alberding EuroNav Service GmbH Lilienthalstr. 3B 12529 Schönefeld (b. Berlin) Überblick GPS und dessen Weiterentwicklung GLONASS Ausbaustand
GLONASS-Satelliten-Antennen- Phasenzentrumsvariationen
 GLONASS-Satelliten-Antennen- Phasenzentrumsvariationen Andreas Gäde 1, U. Hugentobler 1, S. Schaer 1,2, R. Dach 1 1 2 Bundesamt für Landestopographie, Swisstopo Antennenworkshop, Bonn, 21.September 2006
GLONASS-Satelliten-Antennen- Phasenzentrumsvariationen Andreas Gäde 1, U. Hugentobler 1, S. Schaer 1,2, R. Dach 1 1 2 Bundesamt für Landestopographie, Swisstopo Antennenworkshop, Bonn, 21.September 2006
Geodätisches Seminar GPS und moderne Totalstationen. Geodätisches Seminar. GPS und moderne Totalstationen
 UNIVERSITÄT GESAMTHOCHSCHULE SIEGEN Fachbereich 10 Bauingenieurwesen Fachgebiet Praktische Geodäsie Prof.Dr.-Ing. Monika Lindlohr in Zusammenarbeit mit der Firma Geotronics GmbH, Darmstadt GEODÄTISCHES
UNIVERSITÄT GESAMTHOCHSCHULE SIEGEN Fachbereich 10 Bauingenieurwesen Fachgebiet Praktische Geodäsie Prof.Dr.-Ing. Monika Lindlohr in Zusammenarbeit mit der Firma Geotronics GmbH, Darmstadt GEODÄTISCHES
Ergebnisse und Interpretation 54
 Ergebnisse und Interpretation 54 4 Ergebnisse In den Abbildungen 24/4.1 bis 29/4.1 werden die Laktat-Geschwindigkeits-Kurve und die Herzfrequenzwerte der beiden Schwimmgruppen (Männer: n=6, Frauen: n=8)
Ergebnisse und Interpretation 54 4 Ergebnisse In den Abbildungen 24/4.1 bis 29/4.1 werden die Laktat-Geschwindigkeits-Kurve und die Herzfrequenzwerte der beiden Schwimmgruppen (Männer: n=6, Frauen: n=8)
Die erhobenen Daten werden zunächst in einer Urliste angeschrieben. Daraus ermittelt man:
 Die erhobenen Daten werden zunächst in einer Urliste angeschrieben. Daraus ermittelt man: a) Die absoluten Häufigkeit: Sie gibt an, wie oft ein Variablenwert vorkommt b) Die relative Häufigkeit: Sie erhält
Die erhobenen Daten werden zunächst in einer Urliste angeschrieben. Daraus ermittelt man: a) Die absoluten Häufigkeit: Sie gibt an, wie oft ein Variablenwert vorkommt b) Die relative Häufigkeit: Sie erhält
Projektplanung * Von J. Gemer, München
 Projektplanung * Von J Gemer, München Allgemeines Bei GPS-Messungen mit dem Anspruch geodätischer Genauigkeit ist genauso wie bei herkömmlichen terrestrischen Messungen eine gründliche Meßvorbereitung
Projektplanung * Von J Gemer, München Allgemeines Bei GPS-Messungen mit dem Anspruch geodätischer Genauigkeit ist genauso wie bei herkömmlichen terrestrischen Messungen eine gründliche Meßvorbereitung
CHEMISCHES RECHNEN II ANALYT. CHEM. FÜR FORTGS
 Arbeitsunterlagen zu den VU CHEMISCHES RECHNEN II - 771.119 Einheit 1 ANALYT. CHEM. FÜR FORTGS. - 771.314 Einheit 3a ao. Prof. Dr. Thomas Prohaska (Auflage März 006) Beurteilung von Analysenergebnissen
Arbeitsunterlagen zu den VU CHEMISCHES RECHNEN II - 771.119 Einheit 1 ANALYT. CHEM. FÜR FORTGS. - 771.314 Einheit 3a ao. Prof. Dr. Thomas Prohaska (Auflage März 006) Beurteilung von Analysenergebnissen
Bedeutung der Satellitennavigation für die künftige Nutzung des Radars
 Bedeutung der Satellitennavigation für die künftige Nutzung des Radars Dr.-Ing. Martin Sandler in innovative navigation GmbH Leibnizstr. 11 70806 Kornwestheim 19.12.2013 ZKR Kolloquium RADAR - S 1 Gliederung
Bedeutung der Satellitennavigation für die künftige Nutzung des Radars Dr.-Ing. Martin Sandler in innovative navigation GmbH Leibnizstr. 11 70806 Kornwestheim 19.12.2013 ZKR Kolloquium RADAR - S 1 Gliederung
Die erhobenen Daten werden zunächst in einer Urliste angeschrieben. Daraus ermittelt man:
 Die erhobenen Daten werden zunächst in einer Urliste angeschrieben. Daraus ermittelt man: a) Die absoluten Häufigkeit: Sie gibt an, wie oft ein Variablenwert vorkommt b) Die relative Häufigkeit: Sie erhält
Die erhobenen Daten werden zunächst in einer Urliste angeschrieben. Daraus ermittelt man: a) Die absoluten Häufigkeit: Sie gibt an, wie oft ein Variablenwert vorkommt b) Die relative Häufigkeit: Sie erhält
W-Seminar: Versuche mit und am Menschen 2017/2019 Skript
 3. Deskriptive Statistik Die deskriptive (auch: beschreibende) Statistik hat zum Ziel, [ ] Daten durch Tabellen, Kennzahlen [ ] und Grafiken übersichtlich darzustellen und zu ordnen. Dies ist vor allem
3. Deskriptive Statistik Die deskriptive (auch: beschreibende) Statistik hat zum Ziel, [ ] Daten durch Tabellen, Kennzahlen [ ] und Grafiken übersichtlich darzustellen und zu ordnen. Dies ist vor allem
Globale Navigations Satelliten Systeme - GNSS
 Globale Navigations Satelliten Systeme - GNSS Inhalt Sputnik 1 und die Folgen Die ersten GNSS - Navy Navigation Satellite System und Tsikada Entwicklung des Global Positioning System und des Glonass Die
Globale Navigations Satelliten Systeme - GNSS Inhalt Sputnik 1 und die Folgen Die ersten GNSS - Navy Navigation Satellite System und Tsikada Entwicklung des Global Positioning System und des Glonass Die
Untersuchung des Einflusses von Antennennahfeldeffekten und Satellitenabschattungen auf die Genauigkeit GNSS-basierter Längenmessungen
 Geodätische Woche, Stuttgart 16. September 2015 Untersuchung des Einflusses von Antennennahfeldeffekten und Satellitenabschattungen auf die Genauigkeit GNSS-basierter Längenmessungen M.Sc. Florian Zimmermann
Geodätische Woche, Stuttgart 16. September 2015 Untersuchung des Einflusses von Antennennahfeldeffekten und Satellitenabschattungen auf die Genauigkeit GNSS-basierter Längenmessungen M.Sc. Florian Zimmermann
Agenda. Trimble und allnav gmbh Grundprinzip GNSS Wie genau kann man messen Kurzer Systemüberblick
 Agenda Trimble und allnav gmbh Grundprinzip GNSS Wie genau kann man messen Kurzer Systemüberblick allnav gmbh Trimble und allnav gmbh kurz vorgestellt Wolfgang Schmid Der Hersteller Trimble Gegründet 1978
Agenda Trimble und allnav gmbh Grundprinzip GNSS Wie genau kann man messen Kurzer Systemüberblick allnav gmbh Trimble und allnav gmbh kurz vorgestellt Wolfgang Schmid Der Hersteller Trimble Gegründet 1978
Institut für Hygiene und Umwelt Hamburger Landesinstitut für Lebensmittelsicherheit, Gesundheitsschutz und Umweltuntersuchungen
 FREIE UND HANSESTADT HAMBURG BEHÖRDE FÜR SOZIALES, FAMILIE, GESUNDHEIT UND VERBRAUCHERSCHUTZ Institut für Hygiene und Umwelt Hamburger Landesinstitut für Lebensmittelsicherheit, Gesundheitsschutz und Umweltuntersuchungen
FREIE UND HANSESTADT HAMBURG BEHÖRDE FÜR SOZIALES, FAMILIE, GESUNDHEIT UND VERBRAUCHERSCHUTZ Institut für Hygiene und Umwelt Hamburger Landesinstitut für Lebensmittelsicherheit, Gesundheitsschutz und Umweltuntersuchungen
Das Verhalten von GNSS-Satelliten im Erdschatten
 Fakultät Forst-, Geo- & Hydrowissenschaften Geodätisches Institut Professur Geodäsie (Grundlagen) Geodätische Woche/Session 4 Das Verhalten von GNSS-Satelliten im Erdschatten Tino Anders, Lambert Wanninger
Fakultät Forst-, Geo- & Hydrowissenschaften Geodätisches Institut Professur Geodäsie (Grundlagen) Geodätische Woche/Session 4 Das Verhalten von GNSS-Satelliten im Erdschatten Tino Anders, Lambert Wanninger
Satellitenortung und Navigation
 Werner Mansfeld Satellitenortung und Navigation Grundlagen und Anwendung globaler Satellitennavigations Systeme 2., überarbeitete und ergänzte Auflage Mit 275 Abbildungen und 71 Tabellen vieweg VII Vorwort
Werner Mansfeld Satellitenortung und Navigation Grundlagen und Anwendung globaler Satellitennavigations Systeme 2., überarbeitete und ergänzte Auflage Mit 275 Abbildungen und 71 Tabellen vieweg VII Vorwort
ALVA-Ringanalyse. Herbsttagung 2009 der ALVA-Fachgruppe Boden - Pflanzenernährung Linz, 10. November 2009
 ALVA-Ringanalyse Mag. Tanja Strimitzer Bereich DSR Herbsttagung 2009 der ALVA-Fachgruppe Boden - Pflanzenernährung Linz, 10. November 2009 www.ages.at Österreichische Agentur für Gesundheit und Ernährungssicherheit
ALVA-Ringanalyse Mag. Tanja Strimitzer Bereich DSR Herbsttagung 2009 der ALVA-Fachgruppe Boden - Pflanzenernährung Linz, 10. November 2009 www.ages.at Österreichische Agentur für Gesundheit und Ernährungssicherheit