Künstliche Intelligenz - Logische Agenten und Roboter
|
|
|
- Edmund Schubert
- vor 6 Jahren
- Abrufe
Transkript
1 Künstliche Intelligenz - Logische Agenten und Roboter
2 Wird präsentiert von: Alexander Betker Gregor Biering Thiemo Esch Marko Flod Sascha Schewe
3 Unser Motto: Zu Fünft agiert es sich besser.


4 Übersicht 1. Aufgabenstellung 2. Einführung 3. Unser Ansatz 4. Umsetzung 5. Fazit

5 1. Aufgabenstellung Ziel ist es: Ein unbekanntes Labyrinth zu erkunden 3 Würfel (Rot, Grün und Blau), die jeweils mit einem RFID Transponder versehen sind, zu finden Diese an das Ziel zu bringen und Anschliessend schnellstmöglich an die Startposition zurückzufahren Das Team, das am schnellsten von der Zielposition wieder die Startposition erreicht, gewinnt!



6 Equipment LEGO Mindstorm NXT 2.0 Sets, LeJos, ein Labyrinth ca. 3m x 3m




7 LEGO Mindstorm NXT ein Produkt der Firma LEGO, - beinhaltet: einen LEGO Bausatz aus Lego Bausteinen, Motoren, verschiedenen Sensoren und einem programmierbaren NXT-Baustein.


8 LEGO Mindstorm NXT 2.0 Das LEGO Mindstorm NXT-Set enthält: einen NXT-Stein mit 32-Bit-Mikroprozessor vier Sensor- und drei Motoranschlüssen USB-Port und Bluetooth-Anschluss drei Servomotoren mit eingebauten Rotationssensoren einen Ultraschallsensor zwei Druckkontaktsensoren Farb- und Lichtsensor bzw. Lampe in einem Real-Sound-Lautsprecher grafisches Software-Interface für PC und Mac

![Nicht genau C ], für das NXT System) BricxCC Entwicklungsumgebung für](/docs-images/67/57980525/images/9-6.jpg "mehrere Sprachen und Systeme (hauptsächlich NQC und NXC) Mindstorms NXT")

9 Programmierung des NXT-Stein Textbasiert (nur eine Auswahl): NXC (Not exactly C [dt. Nicht genau C ], für das NXT System) BricxCC Entwicklungsumgebung für mehrere Sprachen und Systeme (hauptsächlich NQC und NXC) Mindstorms NXT Toolbox für MATLAB Bibliothek zur Fernsteuerung des NXT per Bluetooth und USB lejos Programmierung in Java Mit grafischer Oberflaeche: Kara Programmierung mittels Zustandsautomaten Microsoft Robotics Studio...
 4 Tastsensoren 1 EOPD Sensor")
 1 Farbsensor 1 Multiplexer viele Lego Bausteine und ein")
10 Unser Zubehör 4 Motoren, 3 Ultraschallsensoren, 1 RFID-Sensor (Radio Frequency Identification) 4 Tastsensoren 1 EOPD Sensor (Electro-Optical Proximity Detector) 1 NXT (programmierbarer Baustein) 1 Farbsensor 1 Multiplexer viele Lego Bausteine und ein privater Mindstorm NXT-Brick
11 Was ist LeJos? Ein Betriebssystem für den Legomindstorm RCX und NXT Ermöglicht die Steuerung der NXT-/RCX-Bauteile mit Java Enthält einen Teil der Java Virtual Machine
12 Was ist ein Agent? Ein Agent ist etwas, das in einer Umgebung agiert. (lat. agere, tun handeln machen) Als Agenten werden Menschen, Tiere und intelligente Wesen in der KI-Forschung bezeichnet

")


13 Was ist Intelligenz?..(lat. intellegere, verstehen) bezeichnet im weitesten Sinne die Fähigkeit zum Erkennen von Zusammenhängen und zum Finden optimaler Problemlösungen


14 Was ist ein intelligenter Agent? Ein Agent agiert intelligent, wenn: seine Aktionen sich an seinen Zielen und Sachlagen orientieren er flexibel auf veränderte Umgebungen und Ziele reagiert er aus Erfahrung lernt er auf gegebene Einschränkungen bzgl. seiner Wahrnehmungs, und Rechenfähigkeiten angemessen eingeht

15 Ein Agent agiert in einer Umgebung:

16 Was ist ein Roboter? Roboter sind physische Agenten, die ihre Umgebung durch Effektoren manipulieren. Sie sind mit Sensoren ausgestattet, mit denen sie ihre Umwelt wahrnehmen. Man unterscheidet Roboter in drei Grundtypen: Manipulatoren mobile Roboter hybride Art: mobiler Roboter mit Manipulatoren
17 Unser Roboter

18 Unser Roboter
19 Unser Konzept einfacher Reflex-Agent modellbasierter Reflex-Agent zielorientierter Reflex-Agent
20 Unser Konzept Anweisung vorhanden Keine Anweisung vorhanden Anweisung vorhanden Keine Anweisung vorhanden Anweisung vorhanden Keine Anweisung vorhanden

21 Unser Konzept einfacher Reflex-Agent modellbasierter Reflex-Agent

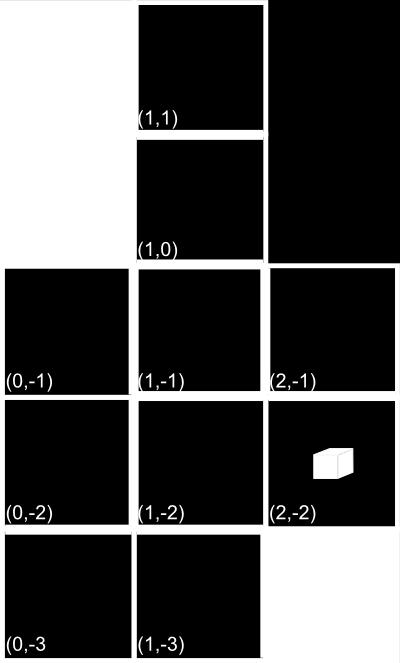
22 Karten-Modell
23 Karten-Modell

24 -Karten-Modell


25 Der Roboter erkennt ob er im Kreis gefahren ist! Karten-Modell

26 Unser Roboter
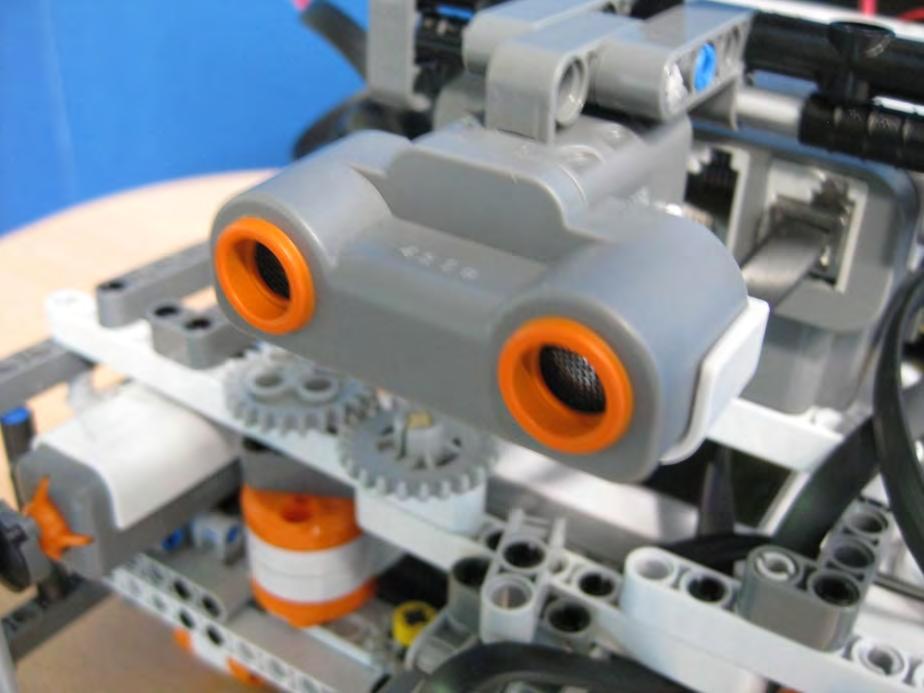
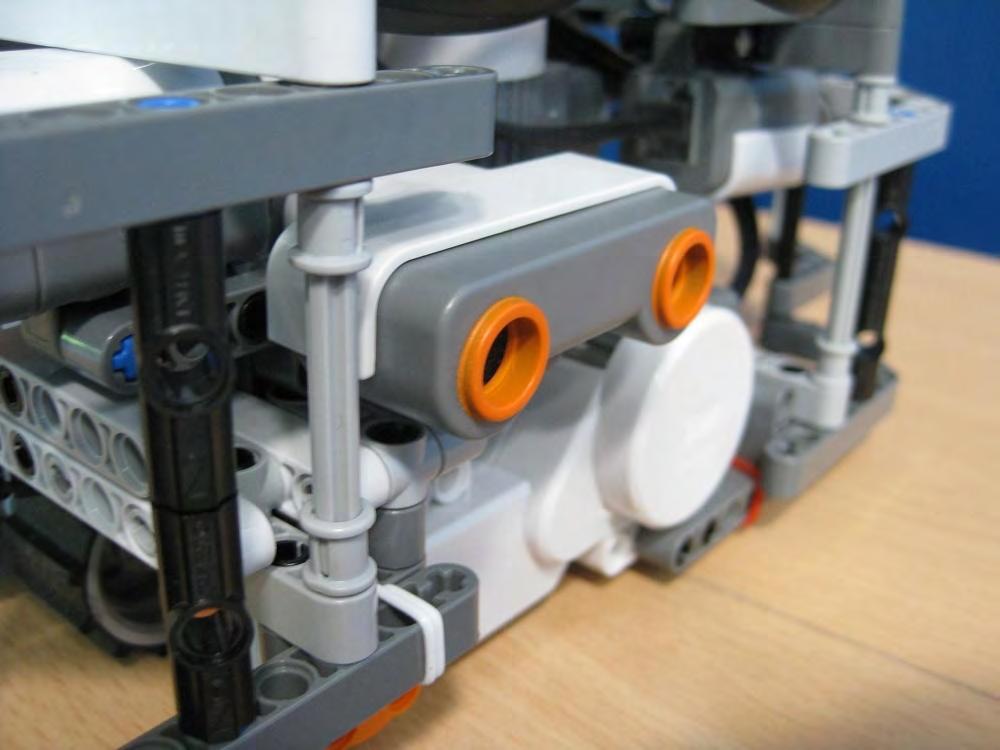
27 Unser Roboter Ultraschall-Sensor vorne Ultraschall-Sensor an der Seite

28 Unser Roboter Touch-Sensoren nehmen Kollisionen mit Wänden wahr

29 Unser Roboter RFID-Sensor, THE CLAW und der Eingang der Auffang-Station für die Blöcke

30 Unser Roboter Ansicht: Hinten RGB- Farbsensor

31 Unser Roboter Multiplexer

32 Unser Roboter Ansicht von unten
33 Fazit: Kompasssensor unzureichend abgeschirmt gegen äußere Störeinflüsse die Schrittmotoren sind unpräzise Teilweise hohe Messfehler bei nahezu allen Sensoren Java-Klassen nur rudimentär vorhanden, setzt das Schreiben notwendiger Util-Klassen voraus Kaum Debugging-Möglichkeiten und Exceptionlokalisation
Lego NXT & LeJOS. Eine Einführung
 Lego NXT & LeJOS Eine Einführung Inhalt Das NXT Set Brick Originalzubehör 3 rd Party Zubehör LeJOS Einleitung Features Einschränkungen Das NXT Set Der Brick 32 bit Arm7 MC 256KB Flash 64KB RAM Integrierter
Lego NXT & LeJOS Eine Einführung Inhalt Das NXT Set Brick Originalzubehör 3 rd Party Zubehör LeJOS Einleitung Features Einschränkungen Das NXT Set Der Brick 32 bit Arm7 MC 256KB Flash 64KB RAM Integrierter
Der Lego NXT Roboter. Hochschule Mannheim Fakultät für Informatik
 Der Lego NXT Roboter Hochschule Mannheim Fakultät für Informatik Der NXT-Stein Technische Daten 32-bit ARM7 Microcontroller 256 Kbytes FLASH, 64 Kbytes RAM 8-bit AVR microcontroller 4 Kbytes FLASH, 512
Der Lego NXT Roboter Hochschule Mannheim Fakultät für Informatik Der NXT-Stein Technische Daten 32-bit ARM7 Microcontroller 256 Kbytes FLASH, 64 Kbytes RAM 8-bit AVR microcontroller 4 Kbytes FLASH, 512
Fraunhofer IAIS. Lernen mit Robotern. Roberta Grundlagen und Experimente. Roberta-Reihe Band 1 - NXT
 Fraunhofer IAIS Lernen mit Robotern Roberta Grundlagen und Experimente Roberta-Reihe Band 1 - NXT Inhaltsverzeichnis Inhaltsverzeichnis Kapitel 1 Einführung 1 Einleitung 3 Roboter in der Bildung 4 LEGO
Fraunhofer IAIS Lernen mit Robotern Roberta Grundlagen und Experimente Roberta-Reihe Band 1 - NXT Inhaltsverzeichnis Inhaltsverzeichnis Kapitel 1 Einführung 1 Einleitung 3 Roboter in der Bildung 4 LEGO
Softwarepraktikum Teamrobotik SS Gruppe 2
 Softwarepraktikum Teamrobotik SS 2007 Gruppe 2 1 LEGO MINDSTORMS NXT Education Base Set 2 Baumöglichkeiten 3 Die Hardware Sensoren: Lichtsensor Ultraschallsensor Geräuschsensor Berührungssensor 3 Motoren
Softwarepraktikum Teamrobotik SS 2007 Gruppe 2 1 LEGO MINDSTORMS NXT Education Base Set 2 Baumöglichkeiten 3 Die Hardware Sensoren: Lichtsensor Ultraschallsensor Geräuschsensor Berührungssensor 3 Motoren
Kepler Robo League 2016
 Kepler Robo League 2016 Wettbewerb Termin: Fr 17.06.2016 14:30 bis 18:00 Uhr Wettbewerbsort: Bundesrealgymnasium Keplerstraße, Keplerstraße 1, 8020 Graz, 3. Stock Nenngeld pro Team pro Bewerb: 20,- Euro
Kepler Robo League 2016 Wettbewerb Termin: Fr 17.06.2016 14:30 bis 18:00 Uhr Wettbewerbsort: Bundesrealgymnasium Keplerstraße, Keplerstraße 1, 8020 Graz, 3. Stock Nenngeld pro Team pro Bewerb: 20,- Euro
Programmierung von Steuerungsalgorithmen für mobile Roboter (Lego-NXT) SOFTWAREPRAKTIKUM SS 2007 ( NICO GEBAUER, STEFAN KIRST, FLORIAN TANKE)
 SOFTWAREPRAKTIKUM SS 2007 ( NICO GEBAUER, STEFAN KIRST, FLORIAN TANKE)") Programmierung von Steuerungsalgorithmen für mobile Roboter (Lego-NXT) SOFTWAREPRAKTIKUM SS 2007 ( NICO GEBAUER, STEFAN KIRST, FLORIAN TANKE) GLIEDERUNG Motivation 1.Teilaufgabe 2.Teilaufgabe 3. Teilaufgabe
Programmierung von Steuerungsalgorithmen für mobile Roboter (Lego-NXT) SOFTWAREPRAKTIKUM SS 2007 ( NICO GEBAUER, STEFAN KIRST, FLORIAN TANKE) GLIEDERUNG Motivation 1.Teilaufgabe 2.Teilaufgabe 3. Teilaufgabe
Fakultät für Informatik, Institut für Robotik. Legorobotik Graphische Programmierung Vorstellung des EV3 Systems und der Programmierumgebung.
 Fakultät für Informatik, Institut für Robotik Legorobotik Graphische Programmierung Vorstellung des EV3 Systems und der Programmierumgebung Ute Ihme Hochschule Mannheim Ute Ihme DAS LEGO MINDSTORMS System
Fakultät für Informatik, Institut für Robotik Legorobotik Graphische Programmierung Vorstellung des EV3 Systems und der Programmierumgebung Ute Ihme Hochschule Mannheim Ute Ihme DAS LEGO MINDSTORMS System
Daniel Braun. Roboter programmieren. mit NXT-G für LEGO MINDSTORMS NXT
 Daniel Braun Roboter programmieren mit NXT-G für LEGO MINDSTORMS NXT Kapitel 2 LEGO MINDSTORMS LEGO kennen viele aus ihrer Kindheit oder von den eigenen Kindern, LEGO, das sind bunte Spielzeugklötze, mit
Daniel Braun Roboter programmieren mit NXT-G für LEGO MINDSTORMS NXT Kapitel 2 LEGO MINDSTORMS LEGO kennen viele aus ihrer Kindheit oder von den eigenen Kindern, LEGO, das sind bunte Spielzeugklötze, mit
Roboter programmieren mit NXC für LEGO MINDSTORMS NXT
 Daniel Braun Roboter programmieren mit NXC für LEGO MINDSTORMS NXT mitp Vorwort 13 i NXTundNXC 15 i.i DerNXT 15 1.2 NXC 16 1.2.1 Not exactly С 16 1.2.2 Compiler 17 1.2.3 Zusammenfassung 17 2 BricxCC 19
Daniel Braun Roboter programmieren mit NXC für LEGO MINDSTORMS NXT mitp Vorwort 13 i NXTundNXC 15 i.i DerNXT 15 1.2 NXC 16 1.2.1 Not exactly С 16 1.2.2 Compiler 17 1.2.3 Zusammenfassung 17 2 BricxCC 19
Inhaltsverzeichnis. Vorwort NXTundNXC DerNXT NXC Not exactly C Compiler Zusammenfassung 17
 Vorwort 13 1 NXTundNXC 15 1.1 DerNXT 15 1.2 NXC 16 1.2.1 Not exactly C 16 1.2.2 Compiler 17 1.2.3 Zusammenfassung 17 2 BricxCC 19 2.1 Installation 19 2.2 Oberfläche 20 2.3 Menüleiste 22 2.3.1 Datei 22
Vorwort 13 1 NXTundNXC 15 1.1 DerNXT 15 1.2 NXC 16 1.2.1 Not exactly C 16 1.2.2 Compiler 17 1.2.3 Zusammenfassung 17 2 BricxCC 19 2.1 Installation 19 2.2 Oberfläche 20 2.3 Menüleiste 22 2.3.1 Datei 22
schnell und portofrei erhältlich bei beck-shop.de DIE FACHBUCHHANDLUNG mitp/bhv
 Roboter programmieren mit NXC für Lego Mindstorms NXT 1. Auflage Roboter programmieren mit NXC für Lego Mindstorms NXT schnell und portofrei erhältlich bei beck-shop.de DIE FACHBUCHHANDLUNG mitp/bhv Verlag
Roboter programmieren mit NXC für Lego Mindstorms NXT 1. Auflage Roboter programmieren mit NXC für Lego Mindstorms NXT schnell und portofrei erhältlich bei beck-shop.de DIE FACHBUCHHANDLUNG mitp/bhv Verlag
Programmierung mit LEGO MINDSTORMS NXT. I. Informatik und algorithmisches Problemlösen
 Programmierung mit LEGO MINDSTORMS NXT I. Informatik und algorithmisches Problemlösen Prof. Dr. Karsten Berns Arbeitsgruppe Robotersysteme Fachbereich Informatik Technische Universität Kaiserslautern 30.09.2010
Programmierung mit LEGO MINDSTORMS NXT I. Informatik und algorithmisches Problemlösen Prof. Dr. Karsten Berns Arbeitsgruppe Robotersysteme Fachbereich Informatik Technische Universität Kaiserslautern 30.09.2010
Roboter programmieren mit NXT-G für LEGO MINDSTORMS NXT Braun
 mitp Professional Roboter programmieren mit NXT-G für LEGO MINDSTORMS NXT von Daniel Braun 1. Auflage Roboter programmieren mit NXT-G für LEGO MINDSTORMS NXT Braun schnell und portofrei erhältlich bei
mitp Professional Roboter programmieren mit NXT-G für LEGO MINDSTORMS NXT von Daniel Braun 1. Auflage Roboter programmieren mit NXT-G für LEGO MINDSTORMS NXT Braun schnell und portofrei erhältlich bei
KNAPP Robo League 2017
 KNAPP Robo League 2017 Wettbewerb Termin: Dienstag 20.06.2017 14:00 Uhr bis 18:00 Uhr Wettbewerbsort: KNAPP AG, Günter-Knapp-Straße 5-7, 8075 Hart bei Graz Anmeldung: mit ausgefülltem Anmeldeformular per
KNAPP Robo League 2017 Wettbewerb Termin: Dienstag 20.06.2017 14:00 Uhr bis 18:00 Uhr Wettbewerbsort: KNAPP AG, Günter-Knapp-Straße 5-7, 8075 Hart bei Graz Anmeldung: mit ausgefülltem Anmeldeformular per
Fakultät für Informatik, Institut für Robotik Laborpraktikum I Legorobotik graphische Programmierung
 Fakultät für Informatik, Institut für Robotik Laborpraktikum I Legorobotik graphische Programmierung Ute Ihme Hochschule Mannheim Ute Ihme DAS LEGO MINDSTORMS System Das EV3 System Prinzip von LEGO MINDSTORMS
Fakultät für Informatik, Institut für Robotik Laborpraktikum I Legorobotik graphische Programmierung Ute Ihme Hochschule Mannheim Ute Ihme DAS LEGO MINDSTORMS System Das EV3 System Prinzip von LEGO MINDSTORMS
Fakultät für Informatik, Institut für Robotik Laborpraktikum I - Medizinarena Legorobotik in C EV3
 Fakultät für Informatik, Institut für Robotik Laborpraktikum I - Medizinarena Legorobotik in C EV3 Ute Ihme Hochschule Mannheim Ute Ihme DAS LEGO MINDSTORMS System Das EV3 System Prinzip von LEGO MINDSTORMS
Fakultät für Informatik, Institut für Robotik Laborpraktikum I - Medizinarena Legorobotik in C EV3 Ute Ihme Hochschule Mannheim Ute Ihme DAS LEGO MINDSTORMS System Das EV3 System Prinzip von LEGO MINDSTORMS
Die Einführung von mehreren "Start Bausteinen", um das Programm zu starten, realisiert leicht die parallele Programmverarbeitung (Parallele Tasks).
.") Programmierung Allgemein Anfänger und Fortgeschrittene können die Programmierfunktion in der LEGO MINDSTORMS Education EV3 Software gut nutzen, weil sie vor allem grafisch ist. Mit Blick auf das Programmieren
Programmierung Allgemein Anfänger und Fortgeschrittene können die Programmierfunktion in der LEGO MINDSTORMS Education EV3 Software gut nutzen, weil sie vor allem grafisch ist. Mit Blick auf das Programmieren
Lego-Roboter im Informatik-Unterricht der Sekundarstufe I
 Neben Robolab und dem Robotics Invention System gibt es eine Vielzahl von Programmierumgebungen für Lego Mindstorms Roboter, z. B. NQC oder LEJOS. Des Weiteren gibt es ActiveX-Elemente, mit denen die Lego-Roboter
Neben Robolab und dem Robotics Invention System gibt es eine Vielzahl von Programmierumgebungen für Lego Mindstorms Roboter, z. B. NQC oder LEJOS. Des Weiteren gibt es ActiveX-Elemente, mit denen die Lego-Roboter
KNAPP Robo League 2018
 KNAPP Robo League 2018 Wettbewerb Termin: Mittwoch 30.05.2018 14:00 Uhr bis 18:00 Uhr Wettbewerbsort: KNAPP Industry Solutions GmbH, Gewerbeparkstaße 17, 8143 Dobl Anmeldung: mit ausgefülltem Anmeldeformular
KNAPP Robo League 2018 Wettbewerb Termin: Mittwoch 30.05.2018 14:00 Uhr bis 18:00 Uhr Wettbewerbsort: KNAPP Industry Solutions GmbH, Gewerbeparkstaße 17, 8143 Dobl Anmeldung: mit ausgefülltem Anmeldeformular
Softwarepraktikum Teamrobotik SS 2007 Abschlusspräsentation
 Inhalt des Vortrags Softwarepraktikum Teamrobotik SS 27 Abschlusspräsentation von Norman Siemer, Thomas Poltrock und Martin Schemmer Einleitung Aufgabenstellung: Kollisionsfreie Navigation durch einen
Inhalt des Vortrags Softwarepraktikum Teamrobotik SS 27 Abschlusspräsentation von Norman Siemer, Thomas Poltrock und Martin Schemmer Einleitung Aufgabenstellung: Kollisionsfreie Navigation durch einen
Inhaltsverzeichnis. Einleitung. LEGO MINDSTORMS - Von RCX zu EV3 Der intelligente EV3 22 Home- und Education-Edition 27
 Einleitung Teil I Grundlagen LEGO MINDSTORMS - Von RCX zu EV3 Der intelligente EV3 22 Home- und Education-Edition 27 2 Die Komponenten des EV3-Sets 29 Nutzen und Einsatzmöglichkeiten der elektronischen
Einleitung Teil I Grundlagen LEGO MINDSTORMS - Von RCX zu EV3 Der intelligente EV3 22 Home- und Education-Edition 27 2 Die Komponenten des EV3-Sets 29 Nutzen und Einsatzmöglichkeiten der elektronischen
1 Einleitung LEGO MINDSTORMS als informationsverarbeitendes System Lehrbeitrag des Buchs Aufbau des Buchs...
 Inhaltsverzeichnis 1 Einleitung... 1 1.1 LEGO MINDSTORMS als informationsverarbeitendes System.... 2 1.2 Lehrbeitrag des Buchs...... 3 1.3 Aufbau des Buchs...... 4 2 Robotik... 5 2.1 Roboter.... 5 2.1.1
Inhaltsverzeichnis 1 Einleitung... 1 1.1 LEGO MINDSTORMS als informationsverarbeitendes System.... 2 1.2 Lehrbeitrag des Buchs...... 3 1.3 Aufbau des Buchs...... 4 2 Robotik... 5 2.1 Roboter.... 5 2.1.1
Praktikum Künstliche Intelligenz
 Fachhochschule Köln Cologne University of Applied Sciences Praktikum Künstliche Intelligenz Wettbewerb RoboCup Soccer CGM Konzeption und Entwicklung eines Roboter-Agenten Prof. Dr. Heiner Klocke Dipl.
Fachhochschule Köln Cologne University of Applied Sciences Praktikum Künstliche Intelligenz Wettbewerb RoboCup Soccer CGM Konzeption und Entwicklung eines Roboter-Agenten Prof. Dr. Heiner Klocke Dipl.
Vermittlung informationstechnischer Inhalte mit Hilfe von LEGO Mindstorms und LeJOS
 Vermittlung informationstechnischer Inhalte mit Hilfe von LEGO Mindstorms und LeJOS Robotics Research Lab Department of Computer Science University of Kaiserslautern 25.06.2009 Inhalt Einleitung Motivation
Vermittlung informationstechnischer Inhalte mit Hilfe von LEGO Mindstorms und LeJOS Robotics Research Lab Department of Computer Science University of Kaiserslautern 25.06.2009 Inhalt Einleitung Motivation
Diese Projektarbeit ist eine Reise durch die aufregende Welt von Lego Mindstorms.
 Diese Projektarbeit ist eine Reise durch die aufregende Welt von Lego Mindstorms. Einleitung Mit Lego Mindstorms kann jeder ohne weiteres richtige Roboter bauen. Mit Hilfe einer speziellen Software kann
Diese Projektarbeit ist eine Reise durch die aufregende Welt von Lego Mindstorms. Einleitung Mit Lego Mindstorms kann jeder ohne weiteres richtige Roboter bauen. Mit Hilfe einer speziellen Software kann
Roboter programmieren im Unterricht der Sekundarstufe I
 Roboter programmieren im Unterricht der Sekundarstufe I C. Kieslich D. Justen Agenda 14:30 14:40 Begrüßung 14:40 15:15 Grundlagen 15:15 16:00 Praktische Übung I 16:00 16:30 Pause 16:30 17:45 Praktische
Roboter programmieren im Unterricht der Sekundarstufe I C. Kieslich D. Justen Agenda 14:30 14:40 Begrüßung 14:40 15:15 Grundlagen 15:15 16:00 Praktische Übung I 16:00 16:30 Pause 16:30 17:45 Praktische
Wie können See how wir far Enchanting away something mitteilen, is. dass am NXT der Lichtsensor an Port 3 angeschlossen ist?
 Wie können See how wir far Enchanting away something mitteilen, is. dass am NXT der Lichtsensor an Port 3 angeschlossen ist? 1. Klicke auf das Fühlen - Menü 2. Klicke auf Sensoren festlegen 3. Suche auf
Wie können See how wir far Enchanting away something mitteilen, is. dass am NXT der Lichtsensor an Port 3 angeschlossen ist? 1. Klicke auf das Fühlen - Menü 2. Klicke auf Sensoren festlegen 3. Suche auf
I n haltsverzeich nis
 I n haltsverzeich nis Einleitung 13 1 LEGO MINDSTORMS NXT 21 1.1 Die Geburt von LEGO MINDSTORMS 21 1.2 Der NXT 22 1.3 Retail- und Education-Edition 24 1.4 Die Komponenten des NXT-Sets 25 1.4.1 Der NXT-Stein
I n haltsverzeich nis Einleitung 13 1 LEGO MINDSTORMS NXT 21 1.1 Die Geburt von LEGO MINDSTORMS 21 1.2 Der NXT 22 1.3 Retail- und Education-Edition 24 1.4 Die Komponenten des NXT-Sets 25 1.4.1 Der NXT-Stein
RFID radiofrequente Identifizierung begreifen
 RFID radiofrequente Identifizierung begreifen B. Ed. Andreas Vogler Einführung 12. Tagung der DGTB Inhalte zeitgemäßen Technikunterrichts Strukturierung und Präzisierung Beratungsaspekte Punkt 3: Innovation,
RFID radiofrequente Identifizierung begreifen B. Ed. Andreas Vogler Einführung 12. Tagung der DGTB Inhalte zeitgemäßen Technikunterrichts Strukturierung und Präzisierung Beratungsaspekte Punkt 3: Innovation,
Vergleich zwischen Open Roberta / NEPO und LEGO MINDSTORMS EV3 / EV3-G. - Übersicht/Fact-Sheet - Programmblöcke - Beispielprogramme
 Vergleich zwischen Open Roberta / NEPO und LEGO MINDSTORMS EV3 / EV3-G - Übersicht/Fact-Sheet - Programmblöcke - Beispielprogramme Roberta-Zentrale Fraunhofer IAIS Version 1.0 18.07.2016 Übersicht Open
Vergleich zwischen Open Roberta / NEPO und LEGO MINDSTORMS EV3 / EV3-G - Übersicht/Fact-Sheet - Programmblöcke - Beispielprogramme Roberta-Zentrale Fraunhofer IAIS Version 1.0 18.07.2016 Übersicht Open
Erste Schritte zum Start findest du hier: https://education.lego.com/de-de/weiterfuehrendeschulen/entdecken/informatik
 Robotik mit https://education.lego.com/de-de/downloads/mindstorms-ev3 Erste Schritte zum Start findest du hier: https://education.lego.com/de-de/weiterfuehrendeschulen/entdecken/informatik Baue zuerst
Robotik mit https://education.lego.com/de-de/downloads/mindstorms-ev3 Erste Schritte zum Start findest du hier: https://education.lego.com/de-de/weiterfuehrendeschulen/entdecken/informatik Baue zuerst
Arbeiten mit programmierbaren Robotern am Beispiel von LEGO Mindstorms NXT. Mag. DI Gerald Höfler, Georg von Peuerbachgymnasium, LINZ
 Arbeiten mit programmierbaren Robotern am Beispiel von LEGO Mindstorms NXT Mag. DI Gerald Höfler, Georg von Peuerbachgymnasium, LINZ Arbeiten mit LEGO Mindstorms Programmerstellung & Optimierung Erklärung
Arbeiten mit programmierbaren Robotern am Beispiel von LEGO Mindstorms NXT Mag. DI Gerald Höfler, Georg von Peuerbachgymnasium, LINZ Arbeiten mit LEGO Mindstorms Programmerstellung & Optimierung Erklärung
mitp Roboter Universum Das EV3 LEGO MINDSTORMS EV3 Ein umfassender Einstieg in Matthias Paul Scholz, Beate Jost, Thorsten Leimbach
 Matthias Paul Scholz, Beate Jost, Thorsten Leimbach Das EV3 Roboter Universum Ein umfassender Einstieg in LEGO MINDSTORMS EV3 mit 8 spannenden Roboterprojekten mitp Von von Inhaltsverzeichnis Einleitung
Matthias Paul Scholz, Beate Jost, Thorsten Leimbach Das EV3 Roboter Universum Ein umfassender Einstieg in LEGO MINDSTORMS EV3 mit 8 spannenden Roboterprojekten mitp Von von Inhaltsverzeichnis Einleitung
First Lego League (FLL) ist ein naturwissenschaftliches Teamprojekt für Jungen und Mädchen gleichermaßen
 ist ein naturwissenschaftliches Teamprojekt für Jungen und Mädchen gleichermaßen") KONTAKT Hochschule Regensburg - Armin Gardeia - 0941/043-1138 mentoring@hs-regensburg.de First Lego League (FLL) ist ein naturwissenschaftliches Teamprojekt für Jungen und Mädchen gleichermaßen Nach einer
KONTAKT Hochschule Regensburg - Armin Gardeia - 0941/043-1138 mentoring@hs-regensburg.de First Lego League (FLL) ist ein naturwissenschaftliches Teamprojekt für Jungen und Mädchen gleichermaßen Nach einer
Pacman. Projektbeschreibung. Aus was wir Pacman nachgebaut haben. Anpassungen and die physikalische Welt, oder wie wir das
 Pacman Projektbeschreibung Übersicht: Unser Projekt Was Pacman eigentlich ist. Aus was wir Pacman nachgebaut haben. Anpassungen and die physikalische Welt, oder wie wir das Pacman-Spiel mit Lego implementiert
Pacman Projektbeschreibung Übersicht: Unser Projekt Was Pacman eigentlich ist. Aus was wir Pacman nachgebaut haben. Anpassungen and die physikalische Welt, oder wie wir das Pacman-Spiel mit Lego implementiert
Pflichtenheft. Projektarbeit. RoboSim (NXT)
") Pflichtenheft Projektarbeit RoboSim (NXT) Projektarbeit 7301: RoboSim, Lego-Roboter, Aufgabe 1 Version 1.0 a Teilnehmer: Philipp Hoppen (hoppp1), Samuel Zehnder (zehns1), André Wittwer (witta3) Projektbetreuer
Pflichtenheft Projektarbeit RoboSim (NXT) Projektarbeit 7301: RoboSim, Lego-Roboter, Aufgabe 1 Version 1.0 a Teilnehmer: Philipp Hoppen (hoppp1), Samuel Zehnder (zehns1), André Wittwer (witta3) Projektbetreuer
lejon LeJOS Odometric Navigator
 lejon LeJOS Odometric Navigator Ein Teamprojekt im Fach Programmierung mobiler Agenten für den Masterstudiengang Informatik/Mobile Systeme im Wintersemester 2005/2006 an der Hochschule Harz Folie 2 P r
lejon LeJOS Odometric Navigator Ein Teamprojekt im Fach Programmierung mobiler Agenten für den Masterstudiengang Informatik/Mobile Systeme im Wintersemester 2005/2006 an der Hochschule Harz Folie 2 P r
LEGO MINDSTORMS NXT Programming
 LEGO MINDSTORMS NXT Programming Bernhard Buchli Andreas Schranzhofer Bernhard Buchli, bbuchli@tik.ee.ethz.ch, ETZ G 75, +41 44 63 27038 Andreas Schranzhofer, schranzhofer@tik.ee.ethz.ch, ETZ G 77, +41
LEGO MINDSTORMS NXT Programming Bernhard Buchli Andreas Schranzhofer Bernhard Buchli, bbuchli@tik.ee.ethz.ch, ETZ G 75, +41 44 63 27038 Andreas Schranzhofer, schranzhofer@tik.ee.ethz.ch, ETZ G 77, +41
Programmierung mit LEGO Mindstorms NXT
 examen.press Programmierung mit LEGO Mindstorms NXT Robotersysteme, Entwurfsmethodik, Algorithmen Bearbeitet von Karsten Berns, Daniel Schmidt 1st Edition. 2010. Taschenbuch. xii, 234 S. Paperback ISBN
examen.press Programmierung mit LEGO Mindstorms NXT Robotersysteme, Entwurfsmethodik, Algorithmen Bearbeitet von Karsten Berns, Daniel Schmidt 1st Edition. 2010. Taschenbuch. xii, 234 S. Paperback ISBN
Lego Roboter mit NXT-G programmieren. Hochschule Mannheim
 Lego Roboter mit NXT-G programmieren Hochschule Mannheim Die Programmiersprache NXT - G Grafische Programmiersprache zur Programmierung von Lego Robotern vom Typ NXT Das Programm Mindstorms NXT-G wird
Lego Roboter mit NXT-G programmieren Hochschule Mannheim Die Programmiersprache NXT - G Grafische Programmiersprache zur Programmierung von Lego Robotern vom Typ NXT Das Programm Mindstorms NXT-G wird
Programmierung mit LEGO MINDSTORMS NXT. Begrüßung und Organisatorisches
 Programmierung mit LEGO MINDSTORMS NXT Begrüßung und Organisatorisches Prof. Dr. Karsten Berns Arbeitsgruppe Robotersysteme Fachbereich Informatik Technische Universität Kaiserslautern 30.09.2010 Herzlich
Programmierung mit LEGO MINDSTORMS NXT Begrüßung und Organisatorisches Prof. Dr. Karsten Berns Arbeitsgruppe Robotersysteme Fachbereich Informatik Technische Universität Kaiserslautern 30.09.2010 Herzlich
Softwarepraktikum Teamrobotik SS 2007
 Lego Mindstorms Softwarepraktikum Teamrobotik SS 2007 Thema: - Programmierung von Steuerungsalgorithmen für mobile Roboter Gruppe 1: - Stefanie Müller und Ina Bosse Hardware: LEGO MINDSTORM Programmiersprache:
Lego Mindstorms Softwarepraktikum Teamrobotik SS 2007 Thema: - Programmierung von Steuerungsalgorithmen für mobile Roboter Gruppe 1: - Stefanie Müller und Ina Bosse Hardware: LEGO MINDSTORM Programmiersprache:
Künstliche Intelligenz
 Künstliche Intelligenz Abschlusspräsentation Gruppe: Blau_KI1112 1 Team Blau_KI1112 Harjin Esmael Jochen Hansch Nils Hühn Felix Marx Nikolai Warkentin Alexander Wecker 2 Inhalt Aufgabenstellung Arbeitsumgebung
Künstliche Intelligenz Abschlusspräsentation Gruppe: Blau_KI1112 1 Team Blau_KI1112 Harjin Esmael Jochen Hansch Nils Hühn Felix Marx Nikolai Warkentin Alexander Wecker 2 Inhalt Aufgabenstellung Arbeitsumgebung
Daniel Braun. Roboter programmieren. mit NXT-G für LEGO MINDSTORMS NXT
 Daniel Braun Roboter programmieren mit NXT-G für LEGO MINDSTORMS NXT Stichwortverzeichnis Numerisch 3D 278 A Abbruchbedingung 195 Ablaufträger 100 Abspielen 216 Adapterkabel 22 Allgemeine Palette 119 Angle-Sensor
Daniel Braun Roboter programmieren mit NXT-G für LEGO MINDSTORMS NXT Stichwortverzeichnis Numerisch 3D 278 A Abbruchbedingung 195 Ablaufträger 100 Abspielen 216 Adapterkabel 22 Allgemeine Palette 119 Angle-Sensor
Roberta - Tutorial Unterschiede EV3/NXT. Fraunhofer IAIS. v0.1_07012013 TL, BJ
 Roberta - Tutorial Unterschiede EV3/NXT Fraunhofer IAIS v0.1_07012013 TL, BJ Index Übersicht... 3 Hardware... 4 Konstruktionsansatz... 5 Programmiersprache... 5 Übersicht Am 07.01.2013 hat LEGO auf der
Roberta - Tutorial Unterschiede EV3/NXT Fraunhofer IAIS v0.1_07012013 TL, BJ Index Übersicht... 3 Hardware... 4 Konstruktionsansatz... 5 Programmiersprache... 5 Übersicht Am 07.01.2013 hat LEGO auf der
[ Experiment- und Datenprotokollierung. mit der EV3 Software]
![[ Experiment- und Datenprotokollierung. mit der EV3 Software]](/thumbs/39/18075793.jpg "[ Experiment- und Datenprotokollierung. mit der EV3 Software]") 2013 [ Experiment- und Datenprotokollierung mit der EV3 Software] Experiment Datenprotokollierung Es gibt zwei Möglichkeiten um die Datenaufzeichnung durchzuführen. Eine besteht darin, die Datenprotokollierung
2013 [ Experiment- und Datenprotokollierung mit der EV3 Software] Experiment Datenprotokollierung Es gibt zwei Möglichkeiten um die Datenaufzeichnung durchzuführen. Eine besteht darin, die Datenprotokollierung
Roboter programmieren
 16 mm Grundregeln beim Roboterbau Grundmodelle bauen: vierrädrig, zweirädrig, mit Kettenantrieb Programmiergrundlagen Motoren Konstanten und Datenknoten Schalter, Logik und Operatoren Sensoren und Variablen
16 mm Grundregeln beim Roboterbau Grundmodelle bauen: vierrädrig, zweirädrig, mit Kettenantrieb Programmiergrundlagen Motoren Konstanten und Datenknoten Schalter, Logik und Operatoren Sensoren und Variablen
Abschlusspräsentation. Marcel Maier Marius Fabian Sebastian Abele Konstantin Meyer
 Abschlusspräsentation Marcel Maier Marius Fabian Sebastian Abele Konstantin Meyer Inhaltsangabe Features Spielablauf live Demonstration Entwicklungsfolge Hardwareaufbau PC Software Künstliche Intelligenz
Abschlusspräsentation Marcel Maier Marius Fabian Sebastian Abele Konstantin Meyer Inhaltsangabe Features Spielablauf live Demonstration Entwicklungsfolge Hardwareaufbau PC Software Künstliche Intelligenz
Fakultät für Informatik, Institut für Robotik Laborpraktikum I Legorobotik in JAVA EV3
 Fakultät für Informatik, Institut für Robotik Laborpraktikum I Legorobotik in JAVA EV3 Ute Ihme Hochschule Mannheim Ute Ihme DAS LEGO MINDSTORMS System Die Bausysteme source: Lego via Cnet 1999: RCX 2007:
Fakultät für Informatik, Institut für Robotik Laborpraktikum I Legorobotik in JAVA EV3 Ute Ihme Hochschule Mannheim Ute Ihme DAS LEGO MINDSTORMS System Die Bausysteme source: Lego via Cnet 1999: RCX 2007:
Roboter programmieren mit NXC für LEGO MINDSTORMS NXT Braun
 Roboter programmieren mit NXC für LEGO MINDSTORMS NXT von Daniel Braun 2., überarb. Aufl. 2010 Roboter programmieren mit NXC für LEGO MINDSTORMS NXT Braun schnell und portofrei erhältlich bei beck-shop.de
Roboter programmieren mit NXC für LEGO MINDSTORMS NXT von Daniel Braun 2., überarb. Aufl. 2010 Roboter programmieren mit NXC für LEGO MINDSTORMS NXT Braun schnell und portofrei erhältlich bei beck-shop.de
Beim ROBORACE werden jedes Jahr Schüler und Studierende mit einer neuen Aufgabe aus dem Bereich der Technischen Kybernetik herausgefordert.
 Beim ROBORACE werden jedes Jahr Schüler und Studierende mit einer neuen Aufgabe aus dem Bereich der Technischen Kybernetik herausgefordert. Die Schüler entwickeln selbstständig vollautonome Roboter auf
Beim ROBORACE werden jedes Jahr Schüler und Studierende mit einer neuen Aufgabe aus dem Bereich der Technischen Kybernetik herausgefordert. Die Schüler entwickeln selbstständig vollautonome Roboter auf
Früh übt sich, wer ein Meister werden will!
 Farbige Isolierbänder, Karte LEGO Mindstorms Education EV3 #1 Früh übt sich, wer ein Meister werden will! /lego1 1. Baue ein Standardfahrzeug. Die Anleitung dazu findest du in der LEGO Mindstorms Education
Farbige Isolierbänder, Karte LEGO Mindstorms Education EV3 #1 Früh übt sich, wer ein Meister werden will! /lego1 1. Baue ein Standardfahrzeug. Die Anleitung dazu findest du in der LEGO Mindstorms Education
Seite 1/6. ModellFerienPass.pdf).
.") Seite 1/6 NXC Programme Legomodell Am Ende dieser Doku findest ein Bild des Modells, das im Kurs eingesetzt wird. Alle Beispielprogramme basieren auf diesem Modell. Ein Anleitung zum Bau ist auf der CD
Seite 1/6 NXC Programme Legomodell Am Ende dieser Doku findest ein Bild des Modells, das im Kurs eingesetzt wird. Alle Beispielprogramme basieren auf diesem Modell. Ein Anleitung zum Bau ist auf der CD
Unterstützung von Lernprozessen durch Visualisierung: Auf ikonischen Programmiersprachen basierende Lernsoftware. Referentin: Sarah Lang.
 Unterstützung von Lernprozessen durch Visualisierung: Auf ikonischen Programmiersprachen basierende Lernsoftware Referentin: Sarah Lang Gliederung Praktische Relevanz des Themas Probleme beim programmieren
Unterstützung von Lernprozessen durch Visualisierung: Auf ikonischen Programmiersprachen basierende Lernsoftware Referentin: Sarah Lang Gliederung Praktische Relevanz des Themas Probleme beim programmieren
Fakultät für Informatik, Institut für Robotik Laborpraktikum I Legorobotik in JAVA
 Fakultät für Informatik, Institut für Robotik Laborpraktikum I Legorobotik in JAVA Ute Ihme Hochschule Mannheim Ute Ihme DAS LEGO MINDSTORMS System Die Bausysteme source: Lego via Cnet 1999: RCX 2007:
Fakultät für Informatik, Institut für Robotik Laborpraktikum I Legorobotik in JAVA Ute Ihme Hochschule Mannheim Ute Ihme DAS LEGO MINDSTORMS System Die Bausysteme source: Lego via Cnet 1999: RCX 2007:
1. Erlaubte Materialien. Intelligente, umweltfreundliche und integrierte Mobilität Regelwerk Robot-Game Grundschulen und weiterführende Schulen
 Intelligente, umweltfreundliche und integrierte Mobilität Regelwerk Robot-Game Grundschulen und weiterführende Schulen Mit der Teilnahme am Roboterwettbewerb verpflichtet sich jedes Team, die Regeln für
Intelligente, umweltfreundliche und integrierte Mobilität Regelwerk Robot-Game Grundschulen und weiterführende Schulen Mit der Teilnahme am Roboterwettbewerb verpflichtet sich jedes Team, die Regeln für
mit der gratis erhältlichen Entwicklungsoberfläche BricxCC und der Programmiersprache NXC.
 Kepler Robo League Kurzinformation für Schulen Was ist die Kepler Robo League? eine Bildungsinitiative des Bundesrealgymnasiums Keplerstraße zum Einstieg in das Bauen und Programmieren von Robotern ohne
Kepler Robo League Kurzinformation für Schulen Was ist die Kepler Robo League? eine Bildungsinitiative des Bundesrealgymnasiums Keplerstraße zum Einstieg in das Bauen und Programmieren von Robotern ohne
Allgemeine Regeln World Robotic Olympiad 2012
 Dieses Regelwerk richtet sich sowohl an Teilnehmer von WRO Junior High School, als auch an Teilnehmer von WRO Senior High School. Die Regeln basieren auf dem internationalen Regelwerk General Rules 2012
Dieses Regelwerk richtet sich sowohl an Teilnehmer von WRO Junior High School, als auch an Teilnehmer von WRO Senior High School. Die Regeln basieren auf dem internationalen Regelwerk General Rules 2012
Abbildung 1 Beispielhafter Streckenaufbau 1. Bahn 1. 30cm 80cm. Bahn 2. 30cm. Bahn 3. 30cm
 Die Aufgabenstellung Die diesjährige ROBORACE-Aufgabe ist an eine Autokolonne, bestehend aus zwei Autos auf einer Straße, angelehnt. Sie sollen mit ihrem Roboter einem zweiten Roboter, der von den Veranstaltern
Die Aufgabenstellung Die diesjährige ROBORACE-Aufgabe ist an eine Autokolonne, bestehend aus zwei Autos auf einer Straße, angelehnt. Sie sollen mit ihrem Roboter einem zweiten Roboter, der von den Veranstaltern
WRO 2014 Regular Category Allgemeine Regeln Erlaubte Materialien
 Erlaubte Materialien 1.1. Alle elektronischen Bauteile müssen Teile aus LEGO Mindstorms Sets (RCX, NXT oder EV3) sein. Zusätzlich ist der HiTechnic Farbsensor erlaubt. Zum Bau des Roboters sind alle originalen
Erlaubte Materialien 1.1. Alle elektronischen Bauteile müssen Teile aus LEGO Mindstorms Sets (RCX, NXT oder EV3) sein. Zusätzlich ist der HiTechnic Farbsensor erlaubt. Zum Bau des Roboters sind alle originalen
Softwarepraktikum Teamrobotik SS 2007
 OTTO-VON-GUERICKE-UNIVERSITÄT MAGDEBURG Softwarepraktikum Teamrobotik SS 2007 Alexa Kernchen & Diana Schult 30.08.2007 Inhaltsverzeichnis EINLEITUNG... 3 AUFGABENSTELLUNGEN... 4 Erste Schritte... 4 1.
OTTO-VON-GUERICKE-UNIVERSITÄT MAGDEBURG Softwarepraktikum Teamrobotik SS 2007 Alexa Kernchen & Diana Schult 30.08.2007 Inhaltsverzeichnis EINLEITUNG... 3 AUFGABENSTELLUNGEN... 4 Erste Schritte... 4 1.
1. Erlaubte Materialien
 Unsere digitale Welt Regelwerk Robot-Game Grundschulen und weiterführende Schulen Mit der Teilnahme am Roboterwettbewerb verpflichtet sich jedes Team, die Regeln für den Wettbewerb zu lesen und zu akzeptieren.
Unsere digitale Welt Regelwerk Robot-Game Grundschulen und weiterführende Schulen Mit der Teilnahme am Roboterwettbewerb verpflichtet sich jedes Team, die Regeln für den Wettbewerb zu lesen und zu akzeptieren.
des NXT Brick mit NXC
 Angewandte Informationstechnologie LEGO Mindstorms NXT Einführung in die Programmierung des NXT Brick mit NXC Dr. Leander Brandl 2010 it.brgkepler.at 1 Allgemeines 1.1 LEGO Mindstorms NXT Im Oktober 2006
Angewandte Informationstechnologie LEGO Mindstorms NXT Einführung in die Programmierung des NXT Brick mit NXC Dr. Leander Brandl 2010 it.brgkepler.at 1 Allgemeines 1.1 LEGO Mindstorms NXT Im Oktober 2006
SP2007 Teamrobotik. Daniel Meyer, Nils Müller & Felix Penzlin. SP2007 Teamrobotik. Lego Mindstorms. Daniel Meyer, Felix Penzlin SS 2007
 Lego Mindstorms SS 2007 Unsere Motivationen Wir sind mit Lego aufgewachsen Interesse für autonome mobile Systeme Projektarbeit im Team Technische Spezifikationen des NXT-Brick 32-bit ARM7 microcontroller
Lego Mindstorms SS 2007 Unsere Motivationen Wir sind mit Lego aufgewachsen Interesse für autonome mobile Systeme Projektarbeit im Team Technische Spezifikationen des NXT-Brick 32-bit ARM7 microcontroller
Programmübersicht Software EV3
 Programmübersicht Software EV3 8. 4. 2. 1. 5. 3. 6. 7. 1. Menüliste Reiter: Verwaltung der Projekte 2. Projekteigenschaften: Übersicht des Programms 3. Werkzeugliste: Programm kommentieren 4. Programmblöcke:
Programmübersicht Software EV3 8. 4. 2. 1. 5. 3. 6. 7. 1. Menüliste Reiter: Verwaltung der Projekte 2. Projekteigenschaften: Übersicht des Programms 3. Werkzeugliste: Programm kommentieren 4. Programmblöcke:
Links um und über Lego Mindstorm RCX und NXT
 Links um und über Lego Mindstorm RCX und NXT Einführungen Einführung LEGO RCX vs. NXT http://www.nxt-in-der-schule.de/lego-mindstorms-education-nxt-system/rcx-vs-nxt Essentials an NXT Tutorial http://www.ortop.org/nxt_tutorial/html/essentials.html
Links um und über Lego Mindstorm RCX und NXT Einführungen Einführung LEGO RCX vs. NXT http://www.nxt-in-der-schule.de/lego-mindstorms-education-nxt-system/rcx-vs-nxt Essentials an NXT Tutorial http://www.ortop.org/nxt_tutorial/html/essentials.html
NXC-Programmiersprache
 Seite 1 von 7 NXC-Programmiersprache Programmbefehle: Strg + N Strg + S Strg + F4 Alt + F4 Strg + P Strg + F Strg + R Strg + G F5 F6 Strg + Z Strg + (nach oben) + Z Strg + X Strg + C Strg + V Strg + Entf
Seite 1 von 7 NXC-Programmiersprache Programmbefehle: Strg + N Strg + S Strg + F4 Alt + F4 Strg + P Strg + F Strg + R Strg + G F5 F6 Strg + Z Strg + (nach oben) + Z Strg + X Strg + C Strg + V Strg + Entf
Künstliche Intelligenz - Logische Agenten und Roboter
 Künstliche Intelligenz - Logische Agenten und Roboter Lego Mindstorm Roboter NXT Alexander Betker Gregor Biering Thiemo Esch Marko Flod Sascha Schewe Betreuer: Prof. Dr. Heiner Klocke Dipl. Inform. Alex
Künstliche Intelligenz - Logische Agenten und Roboter Lego Mindstorm Roboter NXT Alexander Betker Gregor Biering Thiemo Esch Marko Flod Sascha Schewe Betreuer: Prof. Dr. Heiner Klocke Dipl. Inform. Alex
Deinen EV3-Kasten vorbereiten
 1 Deinen EV3-Kasten vorbereiten Alle Roboter dieses Buchs können mit nur einem Lego-Mindstorms-EV3- Kasten gebaut werden (Lego-Katalognummer 31313). Wenn du diesen Kasten, gezeigt in Abbildung 1-1, besitzt,
1 Deinen EV3-Kasten vorbereiten Alle Roboter dieses Buchs können mit nur einem Lego-Mindstorms-EV3- Kasten gebaut werden (Lego-Katalognummer 31313). Wenn du diesen Kasten, gezeigt in Abbildung 1-1, besitzt,
Die Aufgabenstellung. Abbildung 1 Aufbau der Drehtür
 Die Aufgabenstellung Die diesjährige ROBORACE-Aufgabe ist an Satelliten in geostationärer Umlaufbahn angelehnt, die den Orbit und den Ort halten müssen, um funktionsfähig zu sein. Unser stark vereinfachter
Die Aufgabenstellung Die diesjährige ROBORACE-Aufgabe ist an Satelliten in geostationärer Umlaufbahn angelehnt, die den Orbit und den Ort halten müssen, um funktionsfähig zu sein. Unser stark vereinfachter
Fakultät für Informatik, Institut für Robotik EV3 - Laborpraktikum I Einführung in die Programmierung mit JAVA
 Fakultät für Informatik, Institut für Robotik EV3 - Laborpraktikum I Einführung in die Programmierung mit JAVA Ute Ihme Hochschule Mannheim Ute Ihme DAS LEGO MINDSTORMS System Das EV3 System Prinzip von
Fakultät für Informatik, Institut für Robotik EV3 - Laborpraktikum I Einführung in die Programmierung mit JAVA Ute Ihme Hochschule Mannheim Ute Ihme DAS LEGO MINDSTORMS System Das EV3 System Prinzip von
Lejos LEGO-Mindstorms-Roboter in Java programmieren
 Lejos LEGO-Mindstorms-Roboter in Java programmieren Jürgen Stuber juergen@jstuber.net ELUG Themenabend Lejos 2004-08-03 p. 1 Die Mindstorms-Großfamilie NQC Lejos BrickOS pbforth. Scout NQC NQC NQC Tasten
Lejos LEGO-Mindstorms-Roboter in Java programmieren Jürgen Stuber juergen@jstuber.net ELUG Themenabend Lejos 2004-08-03 p. 1 Die Mindstorms-Großfamilie NQC Lejos BrickOS pbforth. Scout NQC NQC NQC Tasten
Kognitive Robotik II - Überblick
 Kognitive Robotik II - Überblick Thomas Röfer VAK: 3-793 Vorlesung: Mi. 13:15-14:45 in MZH 5280 Praktikum: Mi. 15:15-16:45 in MZH 5280 / 5380 http://www.tzi.de/~roefer/kr01 Universität Bremen Abschluss
Kognitive Robotik II - Überblick Thomas Röfer VAK: 3-793 Vorlesung: Mi. 13:15-14:45 in MZH 5280 Praktikum: Mi. 15:15-16:45 in MZH 5280 / 5380 http://www.tzi.de/~roefer/kr01 Universität Bremen Abschluss
2. Teil: Programmierung der Roboter
 ,, 2. Teil: Programmierung der Lego Mindstorms Schulprojekt der Technischen Universität Dänemark Technische Universität Dänemark Institut für Mathematik Januar 2008 , Der Labyrinth- Wettbewerb Lego Mindstorms
,, 2. Teil: Programmierung der Lego Mindstorms Schulprojekt der Technischen Universität Dänemark Technische Universität Dänemark Institut für Mathematik Januar 2008 , Der Labyrinth- Wettbewerb Lego Mindstorms
LEGO MINDSTORMS Von RCX zu EV3
 Kapitel 1 LEGO MINDSTORMS Von RCX zu EV3 Im Jahr 1998 wurden von The LEGO Group die ersten Komponenten der MIND- STORMS-Serie veröffentlicht: Das Robotic Invention Set (RIS) enthielt eine zentrale programmierbare
Kapitel 1 LEGO MINDSTORMS Von RCX zu EV3 Im Jahr 1998 wurden von The LEGO Group die ersten Komponenten der MIND- STORMS-Serie veröffentlicht: Das Robotic Invention Set (RIS) enthielt eine zentrale programmierbare
Postenblatt 1: Berührungssensor
 Postenblatt 1: Berührungssensor In diesem Posten lernst du den Berührungssensor kennen. - 1 x Berührungssensor Der Roboter «fühlt». Der Kontaktschalter besitzt vorne ein rotes, bewegliches Köpfchen, das
Postenblatt 1: Berührungssensor In diesem Posten lernst du den Berührungssensor kennen. - 1 x Berührungssensor Der Roboter «fühlt». Der Kontaktschalter besitzt vorne ein rotes, bewegliches Köpfchen, das
Erreichen eines Ziels (ohne Kamera) Teil II: Realisation
 Teil II: Realisation") Erreichen eines Ziels (ohne Kamera) Teil II: Realisation Vortrag im PSBVLego 2003, PDF-Version Christoph Sommer 2003-01-20 1 Aufgabenstellung Anfahren einer Lampe hinter einem kleinen
Erreichen eines Ziels (ohne Kamera) Teil II: Realisation Vortrag im PSBVLego 2003, PDF-Version Christoph Sommer 2003-01-20 1 Aufgabenstellung Anfahren einer Lampe hinter einem kleinen
Technologie. NXT-Hauptmenü My Files
 My Files Im Untermenü My Files [Meine Dateien] kannst du alle Programme speichern, die du auf dem NXT erstellt oder von deinem Computer heruntergeladen hast. Unter diesem Menü befinden sich drei Ordner:
My Files Im Untermenü My Files [Meine Dateien] kannst du alle Programme speichern, die du auf dem NXT erstellt oder von deinem Computer heruntergeladen hast. Unter diesem Menü befinden sich drei Ordner:
Programmieren mit Open Roberta Einführung und Unterrichtsbeispiele mit dem Calliope mini
 Programmieren mit Open Roberta Einführung und Unterrichtsbeispiele mit dem Calliope mini Roberta ist ein eingetragenes Warenzeichen der Fraunhofer-Gesellschaft e.v. Roberta ist seit 2010 Mitglied der Fraunhofer
Programmieren mit Open Roberta Einführung und Unterrichtsbeispiele mit dem Calliope mini Roberta ist ein eingetragenes Warenzeichen der Fraunhofer-Gesellschaft e.v. Roberta ist seit 2010 Mitglied der Fraunhofer
Die Aufgabenstellung Die Strecke
 Die Aufgabenstellung Die diesjährige ROBORACE-Aufgabe ist an das Kinderspiel Eierlauf angelehnt. Das Ziel ist es, mit einem Roboter, der eine vorgegebene Tragevorrichtung hat (siehe Anhang), einen Ball
Die Aufgabenstellung Die diesjährige ROBORACE-Aufgabe ist an das Kinderspiel Eierlauf angelehnt. Das Ziel ist es, mit einem Roboter, der eine vorgegebene Tragevorrichtung hat (siehe Anhang), einen Ball
Welche Roboter kennst du? Wo brauchst du zuhause Roboter?
 ROBOTER LÖSUNGEN Roboter Mensch Welche Roboter kennst du? Wo brauchst du zuhause Roboter? Individuelle Antworten: R2-D2 / BB6 / C-3PO (Star Wars), Wall-e, Rodney Copperbottom (Film Robots), Optimus Prime
ROBOTER LÖSUNGEN Roboter Mensch Welche Roboter kennst du? Wo brauchst du zuhause Roboter? Individuelle Antworten: R2-D2 / BB6 / C-3PO (Star Wars), Wall-e, Rodney Copperbottom (Film Robots), Optimus Prime
Programmierung mit LEGO MINDSTORMS NXT. II. Graphische Programmierung mit NXT-G
 Programmierung mit LEGO MINDSTORMS NXT II. Graphische Programmierung mit NXT-G Dipl. Inf. Daniel Schmidt Arbeitsgruppe Robotersysteme Fachbereich Informatik Technische Universität Kaiserslautern 19.01.2011
Programmierung mit LEGO MINDSTORMS NXT II. Graphische Programmierung mit NXT-G Dipl. Inf. Daniel Schmidt Arbeitsgruppe Robotersysteme Fachbereich Informatik Technische Universität Kaiserslautern 19.01.2011
Programmierung mit LEGO MINDSTORMS NXT. II. Graphische Programmierung mit NXT-G
 Programmierung mit LEGO MINDSTORMS NXT II. Graphische Programmierung mit NXT-G Dipl. Inf. Daniel Schmidt Arbeitsgruppe Robotersysteme Fachbereich Informatik Technische Universität Kaiserslautern 30.09.2010
Programmierung mit LEGO MINDSTORMS NXT II. Graphische Programmierung mit NXT-G Dipl. Inf. Daniel Schmidt Arbeitsgruppe Robotersysteme Fachbereich Informatik Technische Universität Kaiserslautern 30.09.2010
REGULAR CATEGORY 2019 Altersklasse Starter
 Aufgabenstellung für die REGULAR CATEGORY 2019 Altersklasse Starter Smart Passenger Transport Offizieller Organisator der World Robot Olympiad in Deutschland Inhaltsverzeichnis 1 WRO Leitprinzipien...
Aufgabenstellung für die REGULAR CATEGORY 2019 Altersklasse Starter Smart Passenger Transport Offizieller Organisator der World Robot Olympiad in Deutschland Inhaltsverzeichnis 1 WRO Leitprinzipien...
Inhaltsverzeichnis. Andreas Stadler. Mein LEGO -EV3-Buch. Eigene Roboter bauen und programmieren mit LEGO MINDSTORMS. ISBN (Buch):
:") Andreas Stadler Mein LEGO -EV3-Buch Eigene Roboter bauen und programmieren mit LEGO MINDSTORMS ISBN (Buch): 978-3-446-44737-0 ISBN (E-Book): 978-3-446-44900-8 Weitere Informationen oder Bestellungen unter
Andreas Stadler Mein LEGO -EV3-Buch Eigene Roboter bauen und programmieren mit LEGO MINDSTORMS ISBN (Buch): 978-3-446-44737-0 ISBN (E-Book): 978-3-446-44900-8 Weitere Informationen oder Bestellungen unter
Wege ins Studium und in den Beruf Regelwerk Robot-Game. 1. Erlaubte Materialien
 Wege ins Studium und in den Beruf Regelwerk Robot-Game Mit der Teilnahme am Roboterwettbewerb verpflichtet sich jedes Team, die Regeln für den Wettbewerb zu lesen und zu akzeptieren. Verstöße gegen die
Wege ins Studium und in den Beruf Regelwerk Robot-Game Mit der Teilnahme am Roboterwettbewerb verpflichtet sich jedes Team, die Regeln für den Wettbewerb zu lesen und zu akzeptieren. Verstöße gegen die
Aufgabe Im Quadrat fahren
 Aufgabensammlung LEGO MINDSTORMS NXT Version 4.6.13 Aufgabe Im Quadrat fahren Ziel Sie programmieren den Lego Roboter mit dem Programm LEGO MINDSTORMS Sie kennen Bedingungen und Schleifen Zeitaufwand 20
Aufgabensammlung LEGO MINDSTORMS NXT Version 4.6.13 Aufgabe Im Quadrat fahren Ziel Sie programmieren den Lego Roboter mit dem Programm LEGO MINDSTORMS Sie kennen Bedingungen und Schleifen Zeitaufwand 20
Technologie. Unter diesem Menü befinden sich drei Ordner:
 My Files Die Dateien werden automatisch in den zutreffenden Ordner abgelegt. Wenn du ein Programm mit Klang-Datei auf den NXT herunterlädst, wird das Programm selbst unter Software files, die Klang-Datei
My Files Die Dateien werden automatisch in den zutreffenden Ordner abgelegt. Wenn du ein Programm mit Klang-Datei auf den NXT herunterlädst, wird das Programm selbst unter Software files, die Klang-Datei
Die Denkschule 1 Reto Speerli
 Die Denkschule 1 Octopus A1 Aufgabe: Verbinde den NXT-Baustein (CPU) mit allen Motoren und den Sensoren (Berührung, Ultraschall, Licht und Geräusch). Logge dich beim Open-Roberta Lab ein und verbinde den
Die Denkschule 1 Octopus A1 Aufgabe: Verbinde den NXT-Baustein (CPU) mit allen Motoren und den Sensoren (Berührung, Ultraschall, Licht und Geräusch). Logge dich beim Open-Roberta Lab ein und verbinde den
Matthias Paul Scholz. 2. Auflage
 Matthias Paul Scholz 2. Auflage Einleitung................................................ 13 1 LEGO MINDSTORMS NXT................................. 21 1.1 Die Geburt von LEGO MINDSTORMS........................
Matthias Paul Scholz 2. Auflage Einleitung................................................ 13 1 LEGO MINDSTORMS NXT................................. 21 1.1 Die Geburt von LEGO MINDSTORMS........................
Arbeitsblatt: Berührungssensor (Posten 1)
") Arbeitsblatt: Berührungssensor (Posten 1) a) Was bedeutet die Zahl, die auf dem Display angezeigt wird, wenn du den Sensor benutzt? b) Wie schnell reagiert der Sensor? c) Ändert sich der Wert, wenn der
Arbeitsblatt: Berührungssensor (Posten 1) a) Was bedeutet die Zahl, die auf dem Display angezeigt wird, wenn du den Sensor benutzt? b) Wie schnell reagiert der Sensor? c) Ändert sich der Wert, wenn der
Mathematik. Technik. Programmieren. Physik. Mechanik. Elektronik. Getriebeverhältnisse. Sensoren Antwort/ Feedback. Einfache Maschinen
 Robotics ist angewandte Mathematik und fördert das forschende Lernen Physik Elektronik Sensoren Antwort/ Feedback Mathematik Technik Programmieren Mechanik Getriebeverhältnisse Einfache Maschinen Geometrie
Robotics ist angewandte Mathematik und fördert das forschende Lernen Physik Elektronik Sensoren Antwort/ Feedback Mathematik Technik Programmieren Mechanik Getriebeverhältnisse Einfache Maschinen Geometrie
Bild Artikelnummer NAME Farbe Menge STEIN 1X2 BRICK 1X2 STEIN 1X2 BRICK 1X2 STEIN 2X2 BRICK 2X2 STEIN 1X4 BRICK 1X4 STEIN 1X4 BRICK 1X4 STEIN 1X4
 Baustein 2: Benötigtes Material Bevor Sie etwas bestellen, lesen Sie bitte vorher "Baustein 5: Tipps & Tricks" durch. Dort finden Sie wichtige Informationen zur Verfügbarkeit von LEGO -Teilen. Wenn bereits
Baustein 2: Benötigtes Material Bevor Sie etwas bestellen, lesen Sie bitte vorher "Baustein 5: Tipps & Tricks" durch. Dort finden Sie wichtige Informationen zur Verfügbarkeit von LEGO -Teilen. Wenn bereits