Forum AutoVision Saal 1, Wolfsburg. 8. November 2016
|
|
|
- Alexa Franke
- vor 6 Jahren
- Abrufe
Transkript



1 Herausforderungen, Migrationspfade und Zukunftstechnologien auf dem Weg hin zum vollautomatisierten Fahren Perspektiven und Sichtweisen aus dem Blickwinkel eines Automobilradars Forum AutoVision Saal 1, Wolfsburg 8. November 2016 Dr.-Ing. M. Kunert, Robert Bosch GmbH, Leonberg Dipl.-Ing. F. Meinl, Robert Bosch GmbH, Leonberg M.Sc. M. Stolz, Robert Bosch GmbH, Leonberg 32. VDI/VW GEMEINSCHAFTSTAGUNG FAHRERASSISTENZSYSTEME 8/
2 Vortragsübersicht Motivation, Anforderungen und Randbedingungen des HAF Automobilradar Perspektiven und Sichtweisen Messungen mit einem hochauflösenden Radarprototyp Zusammenfassung und Ausblick
3 Vortragsübersicht Motivation, Anforderungen und Randbedingungen des HAF Automobilradar Perspektiven und Sichtweisen Messungen mit einem hochauflösenden Radarprototyp Zusammenfassung und Ausblick
, Road Safety Annual Report 2016, OECD Publishing, Paris. http://dx.doi.org/10.")
4 Die Visionen des automatisierten Fahrens Die Vision vom unfallfreien Fahren Quelle: OECD/ITF (2016), Road Safety Annual Report 2016, OECD Publishing, Paris.
")
5 Die Visionen des automatisierten Fahrens Die Vision vom unfallfreien Fahren (VRU Anteil )




6 Die Visionen des automatisierten Fahrens Die Vision vom neuen Lebensraum Auto Bildquellen: Daimler AG, Stuttgart (F15 Prototyp) Apple Inc. (icar concept car) Bosch GmbH (HAD)





7 Die Visionen des automatisierten Fahrens Die Vision von shared & green mobility Bildquellen (Internet): Uber, Car2Go, TESLA, Lyft, DriveNow

8 Die verschiedenen Automatisierungsstufen Quelle: Robert Bosch GmbH

9 Die verschiedenen Automatisierungsstufen Quelle: Robert Bosch GmbH
10 Wann kommen die Automatisierungsstufen 4 und 5? TESLA Stufe 5 HW fertig SW Freischaltung OTA später Quelle: TESLA
11

12 Wann kommen die Automatisierungsstufen 4 und 5? TESLA Stufe 5 HW fertig SW Freischaltung OTA später
13 Wann kommen die Automatisierungsstufen 4 und 5? Uber Freight Erste vollautomatische Auslieferung von Dosenbier in USA Quelle: Uber
14

15 Wann kommen die Automatisierungsstufen 4 und 5? Uber Freight Erste vollautomatische Auslieferung von Dosenbier in USA
16 Wann kommen die Automatisierungsstufen 4 und 5? Fahrerlos Fahren - Alter Hut? Das gab s doch schon 1987 Quelle: VaMoRs

17

18 Wann kommen die Automatisierungsstufen 4 und 5? Fahrerlos Fahren - Alter Hut? Das gab s doch schon 1987
19 Wann kommen die Automatisierungsstufen 4 und 5? Wird Stufe 5 schon praktiziert? Quelle: Youtube

20

21 Wann kommen die Automatisierungsstufen 4 und 5? Wird Stufe 5 schon praktiziert?
22 Wann kommen die Automatisierungsstufen 4 und 5? Restrisiko & aktuell die Grenzen Quelle: Youtube

23
24 Wann kommen die Automatisierungsstufen 4 und 5? Restrisiko & aktuell die Grenzen









25 Revolutionär oder evolutionär zur Stufe 5? Disruptiver, vollautomatischer Fahransatz Existierende Fahrerassistenzfunktionen Maschine kann mit allen Umweltund Verkehrssituationen völlig fehlerfrei und selbstständig umgehen. Notwendige Infrastruktur, Gesetzgebung und Absicherungsmechanismen sind vorhanden. Maschinelles Wissen und Handeln immer rechtzeitig abrufbar. Ethik Einschätzung Fahrerexpertise Situationserkennung Aktionsplanungen, Intention Maschine lernt Zug um Zug immer komplexere Fahraufgaben zu übernehmen. Kontinuierlicher Wissensaufbau Quelle: Google / Robert Bosch GmbH

26 Anforderungsverschärfungen bis zur Stufe 5 Quelle: Robert Bosch GmbH

27 Sensorportfolio Evolution zum vollautomatisiertes Fahren Quelle: Sensors & Data Management for Autonomous Vehicles report, Oct. 2015, Yole Developpement
28 Vortragsübersicht Motivation, Anforderungen und Randbedingungen des HAF Automobilradar Perspektiven und Sichtweisen Messungen mit einem hochauflösenden Radarprototyp Zusammenfassung und Ausblick

29 Die Geschichte der Automobilradare Quelle: Robert Bosch GmbH Bildquellen: Google Bilder


")
 LRR4")

30 Welche Rolle spielen Automobilradare beim HAF? ACC1 (2000) ACC2 (2004) LRR3 (2009) MRR (2013) LRR4 (2015) Von der ACC-Funktion zum hochautomatisierten Fahren (HAF) Quelle: Robert Bosch GmbH
31 Neue Herausforderungen für zukünftige Radarsysteme Radar Anforderungen und Aufgaben (bis Automatisierungsstufe 2) Entfernung (x und y Ablage) Rel. Geschwindigkeit (x [und y]) Rudimentäre Objekteigenschaften Radar Anforderungen und Aufgaben (ab Automatisierungsstufe 3) Entfernung (x und y Ablage) Rel. Geschwindigkeit (x [und y]) Objektausdehnung (x und y Richtung) Objekthöhe (z Richtung) Objektorientierung und Ausrichtung Objektklassifikation (Mikro-Doppler) Randbebauung und Landmarks Freiflächenerkennung Verkehrsteilnehmer Verkehrssituation Unvermeidbare Kollisionserkennung Gleichbewegte Objekte (Clustering) Prädiktion der Bewegungsbahn Intentionserkennung (geht oder stoppt) Ausweichpfade (Freifläche plus) Risikozonen (Grauflächen) Kollisionszonen (Sperrflächen) Objekterkennung (Klassifizierung plus) Quelle: Robert Bosch GmbH



32 Höhere Zuverlässigkeit durch orthogonale Redundanz Komplementäre Sensorfusion Redundante Sensorfusion Sensor Technologie Radar Sensor Technologie Video Quelle: Robert Bosch GmbH


33 Innovative Sensordatenfusion auf Rasterebene Quelle: Robert Bosch GmbH











34 Ständige Verfügbarkeit unter allen Wetterbedingungen Wolkenbrüche Blendungen (Sonne,Scheinwerfer) Nebel und Smog Sensorverschmutzung (Dreck,Eis) Schneesturm Gischt und Schleppwasser Quelle: EU H2020 MG-3.6a-2015 SMARTCART project proposal, Figure 6 on page 5


35 Neue Perspektiven und Leistungsmerkmale - µ-doppler Quelle: Robert Bosch GmbH


36 Neue Perspektiven und Leistungsmerkmale Bildradar Quelle: Robert Bosch GmbH

37 Neuer Entwicklungsprozess für hochperformante Radare Quelle: Robert Bosch GmbH

38 Die technologischen Migrationspfade Quelle: Robert Bosch GmbH

39 Globale, domänenübergreifende Optimierungsstrategien Quelle: Robert Bosch GmbH AutoSWIFT BMBF Projekt
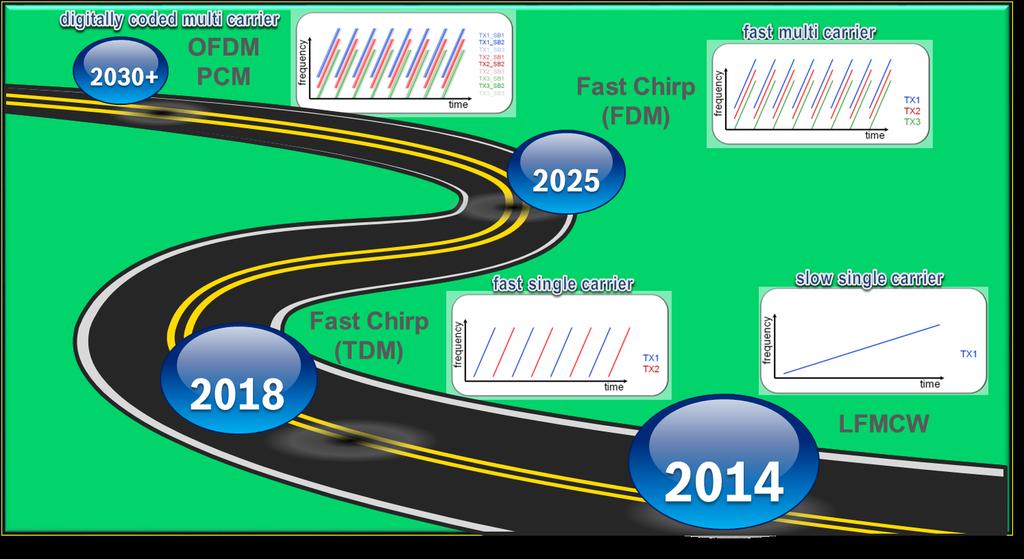
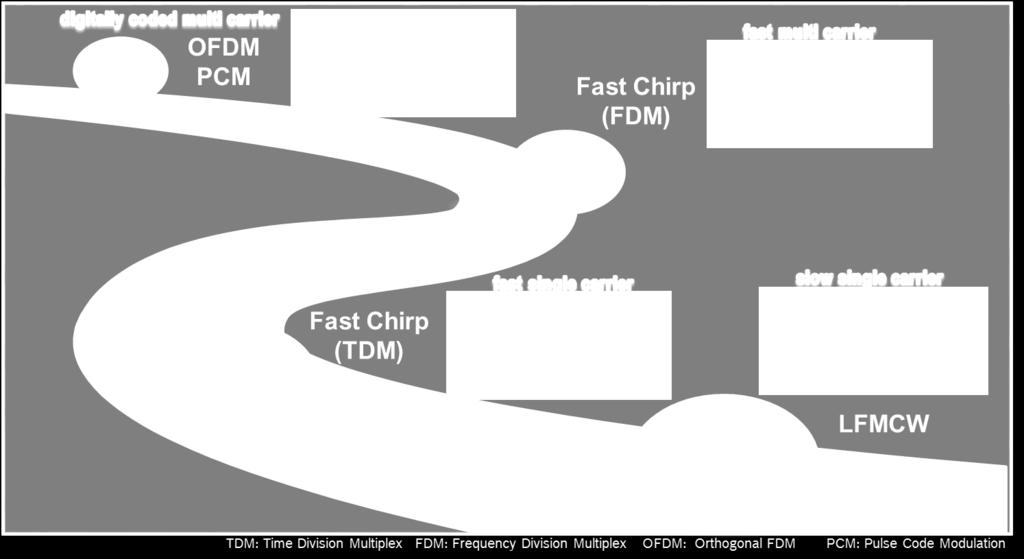
40 Die Technologie-Roadmaps Modulationsarten Quelle: Robert Bosch GmbH
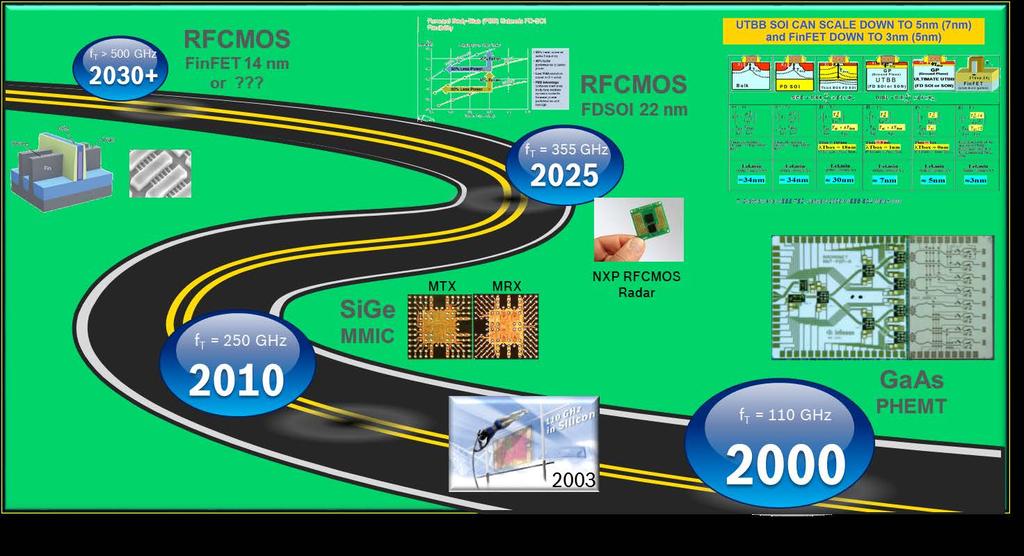
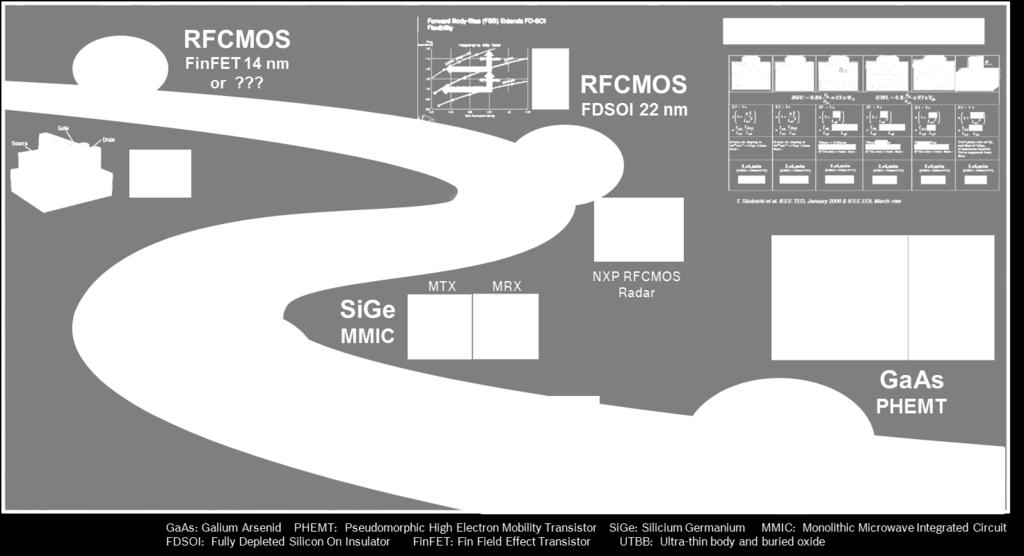
41 Die Technologie-Roadmaps MMIC Fertigung Quelle: Robert Bosch GmbH
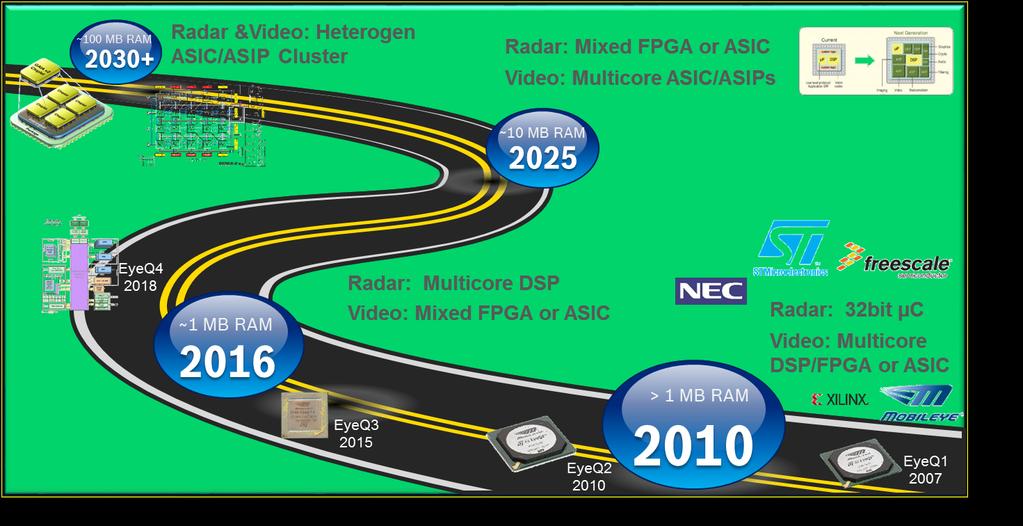
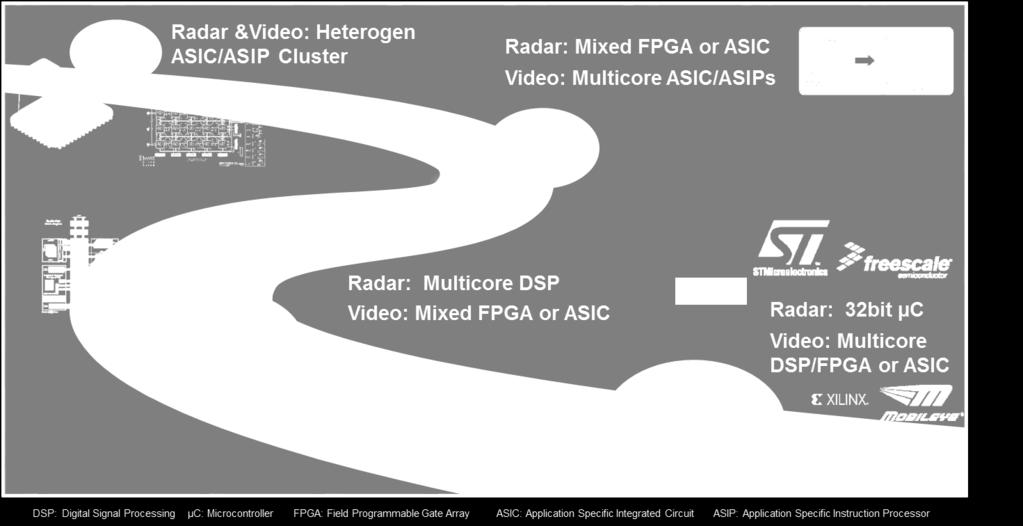
42 Die Technologie-Roadmaps Rechenarchitkturen Quelle: Robert Bosch GmbH
43 Vortragsübersicht Motivation, Anforderungen und Randbedingungen des HAF Automobilradar Perspektiven und Sichtweisen Messungen mit einem hochauflösenden Radarprototyp Zusammenfassung und Ausblick

44 Radar-Messungen - µ-doppler Fußgänger

45 Radar-Messungen - µ-doppler Radfahrer

46 Radar-Messungen - µ-doppler LKW

47 Radar-Messungen - Kreuzungsverkehr
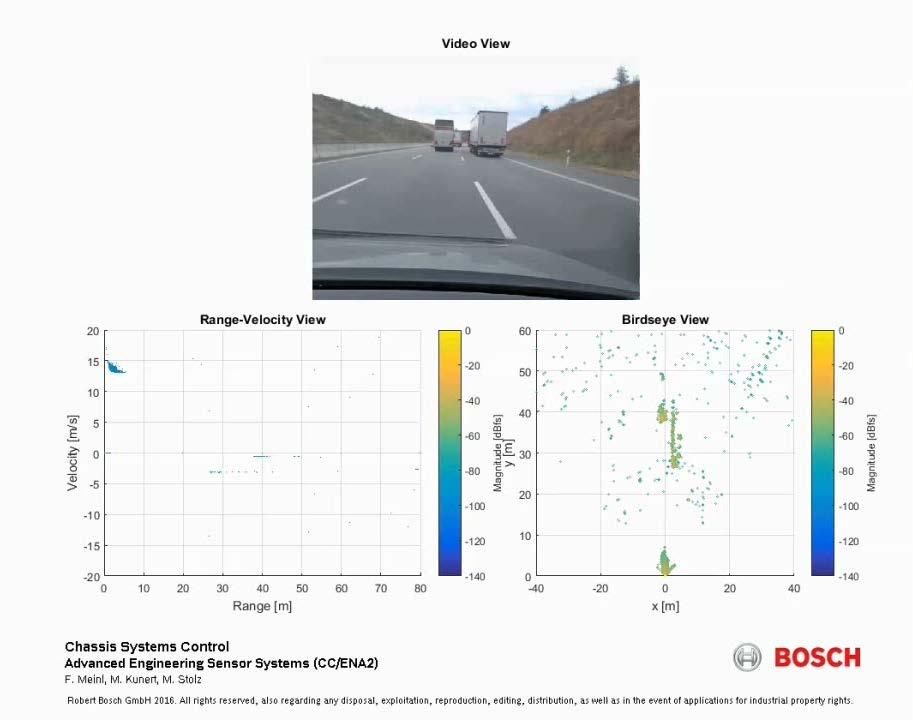
48 Radar-Messungen - Autobahn
49 Radar-Messungen - Landstrasse

50 Radar-Messungen - Infrastrukturen
51 Vortragsübersicht Motivation, Anforderungen und Randbedingungen des HAF Automobilradar Perspektiven und Sichtweisen Messungen mit einem hochauflösenden Radarprototyp Zusammenfassung und Ausblick

52 Zusammenfassung Bildquelle: : IoTTech News, Rise of the smart machines, James Bourne



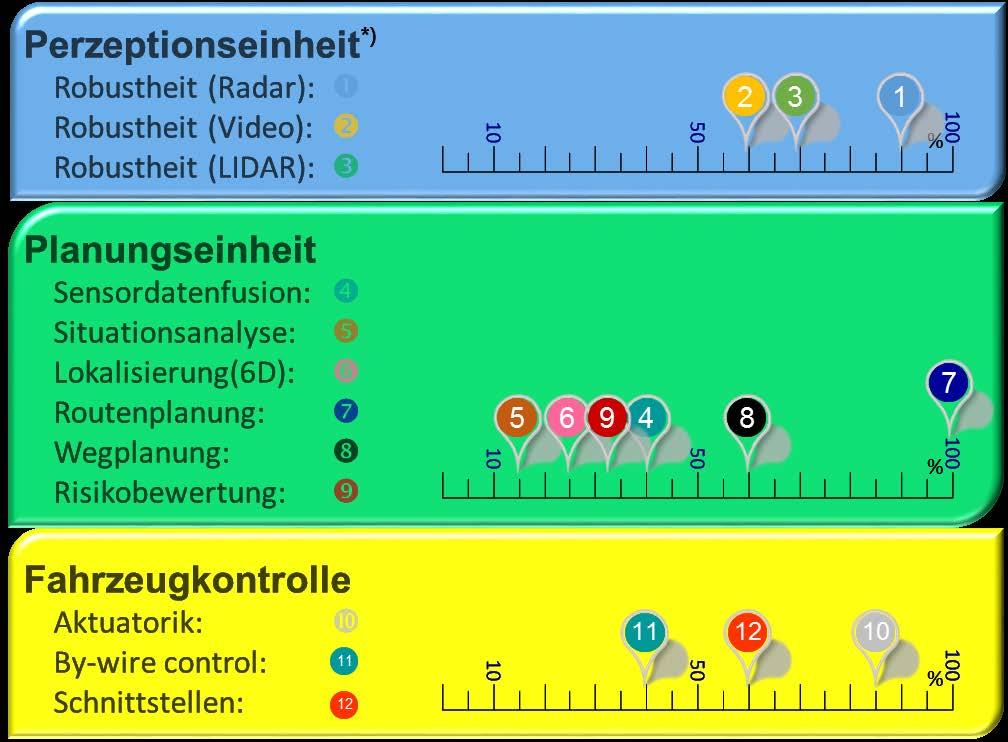
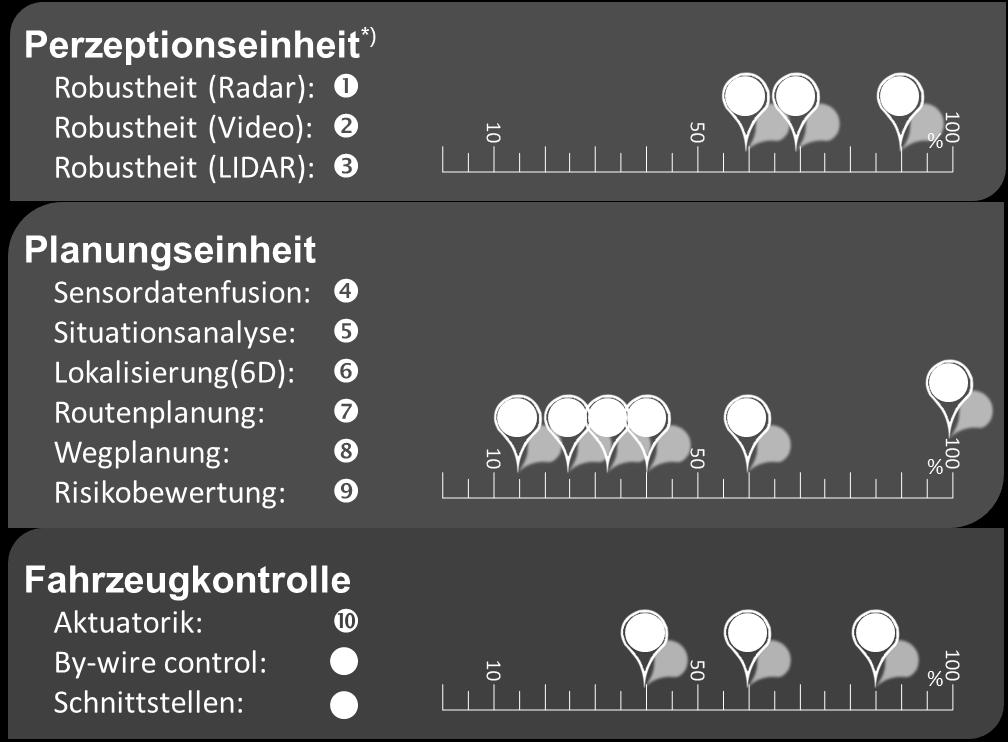
53 Zusammenfassung - Reifegrad der HAF-Komponenten *) hier nur Robustheit im Fokus Quelle: Robert Bosch GmbH

54 Vielen Dank für Ihre Aufmerksamkeit! If you think personal cars will survive as status symbols, remember horses were once status symbols Source: Financial Times Driveless cars will change everything by Simon Kupfer Quelle:
Autonomes Fahren Technologien und Chancen
 Shaping the future Autonomes Fahren Technologien und Chancen Roland Siegwart, ETH Zurich www.asl.ethz.ch www.wysszurich.ch ETH, Januar 31, 2017 Roland Siegwart 31.01.2017 1 Mobilität der Puls unserer Gesellschaft
Shaping the future Autonomes Fahren Technologien und Chancen Roland Siegwart, ETH Zurich www.asl.ethz.ch www.wysszurich.ch ETH, Januar 31, 2017 Roland Siegwart 31.01.2017 1 Mobilität der Puls unserer Gesellschaft
Möglichkeiten der Automatisierung im Motorisierten Individualverkehr Verkehrsträger Strasse
 Inputreferat Möglichkeiten der Automatisierung im Motorisierten Individualverkehr Verkehrsträger Strasse Noch am Steuer: Andreas Egger AMAG Import, Leiter Business Process Development Mitglied der erweiterten
Inputreferat Möglichkeiten der Automatisierung im Motorisierten Individualverkehr Verkehrsträger Strasse Noch am Steuer: Andreas Egger AMAG Import, Leiter Business Process Development Mitglied der erweiterten
Verbundprojekt. Automated Cars and Intelligent Traffic in the City. Automatisierte Fahrzeuge und Intelligenter Verkehr in der Stadt
 Verbundprojekt Automated Cars and Intelligent Traffic in the City Automatisierte Fahrzeuge und Intelligenter Verkehr in der Stadt Dr. Ulrich Kreßel, Daimler AG Fachtagung Automatisiertes und vernetztes
Verbundprojekt Automated Cars and Intelligent Traffic in the City Automatisierte Fahrzeuge und Intelligenter Verkehr in der Stadt Dr. Ulrich Kreßel, Daimler AG Fachtagung Automatisiertes und vernetztes
Mobilität der Zukunft - wie könnte diese aussehen und was ist dafür zu tun?
 Mobilität der Zukunft - wie könnte diese aussehen und was ist dafür zu tun? KIT Die Forschungsuniversität in der Helmholtz-Gemeinschaft www.kit.edu Wie sah die Mobilität früher aus? 2 16.02.2017 Dr.-Ing.
Mobilität der Zukunft - wie könnte diese aussehen und was ist dafür zu tun? KIT Die Forschungsuniversität in der Helmholtz-Gemeinschaft www.kit.edu Wie sah die Mobilität früher aus? 2 16.02.2017 Dr.-Ing.
OWM Future Inspiration Day 22. März 2017 Artificial Intelligence Bosch is teaching the vehicle how to drive. Rosa Meckseper VP Marketing and Business
 OWM Future Inspiration Day 22. März 2017 Artificial Intelligence Bosch is teaching the vehicle how to drive. Rosa Meckseper VP Marketing and Business Strategy Robert Bosch GmbH INTERNET DER DINGE OWM R.
OWM Future Inspiration Day 22. März 2017 Artificial Intelligence Bosch is teaching the vehicle how to drive. Rosa Meckseper VP Marketing and Business Strategy Robert Bosch GmbH INTERNET DER DINGE OWM R.
Mercedes-Benz Cars Road to No.1 IFA Kongress 2016: Neue Strukturen und Geschäftsfelder in der Automobilwirtschaft
 Mercedes-Benz Cars Road to No.1 IFA Kongress 2016: Neue Strukturen und Geschäftsfelder in der Automobilwirtschaft Ola Källenius Vorstandsmitglied der Daimler AG, Mercedes-Benz Cars Vertrieb Mercedes-Benz
Mercedes-Benz Cars Road to No.1 IFA Kongress 2016: Neue Strukturen und Geschäftsfelder in der Automobilwirtschaft Ola Källenius Vorstandsmitglied der Daimler AG, Mercedes-Benz Cars Vertrieb Mercedes-Benz
Digitalisierung gestalten und integrierte Mobilitätsdienstleistungen stärken Eine Einführung
 Für Mensch & Umwelt UBA-Forum mobil & nachhaltig Digitalisierung gestalten und integrierte Mobilitätsdienstleistungen stärken Eine Einführung Tim Schubert Fachgebiet I 3.1 Umwelt und Verkehr Umweltbundesamt
Für Mensch & Umwelt UBA-Forum mobil & nachhaltig Digitalisierung gestalten und integrierte Mobilitätsdienstleistungen stärken Eine Einführung Tim Schubert Fachgebiet I 3.1 Umwelt und Verkehr Umweltbundesamt
Technikvergleich zwischen FTS und autonomen PKW
 Technikvergleich zwischen FTS und autonomen PKW Die Bedeutung von Automatisierung Dr.-Ing. G. Ullrich, Forum-FTS GmbH, Voerde; Kurzfassung Die Automobilindustrie entwickelt mit Hochdruck das autonome Auto.
Technikvergleich zwischen FTS und autonomen PKW Die Bedeutung von Automatisierung Dr.-Ing. G. Ullrich, Forum-FTS GmbH, Voerde; Kurzfassung Die Automobilindustrie entwickelt mit Hochdruck das autonome Auto.
Autonomes Fahren. Überblick und Trends. Jürgen Kohlhoff Fraunhofer-Institut für Naturwissenschaftlich-Technische Trendanalysen INT
 Autonomes Fahren Überblick und Trends Jürgen Kohlhoff Fraunhofer-Institut für Naturwissenschaftlich-Technische Trendanalysen INT Fraunhofer INT Tag der offenen Tür, 08.07.2017 Inhalt Worum geht es? Beispiel:
Autonomes Fahren Überblick und Trends Jürgen Kohlhoff Fraunhofer-Institut für Naturwissenschaftlich-Technische Trendanalysen INT Fraunhofer INT Tag der offenen Tür, 08.07.2017 Inhalt Worum geht es? Beispiel:
Mobile Edge Computing basierte Objekterkennung für hoch- und vollautomatisiertes Fahren
 MEC-Server Mobile Edge Computing basierte Objekterkennung für hoch- und vollautomatisiertes Fahren BMWi-BMBF Fachtagung Automatisiertes und vernetztes Fahren Dr. Rüdiger W. Henn, Robert Bosch GmbH, Berlin,
MEC-Server Mobile Edge Computing basierte Objekterkennung für hoch- und vollautomatisiertes Fahren BMWi-BMBF Fachtagung Automatisiertes und vernetztes Fahren Dr. Rüdiger W. Henn, Robert Bosch GmbH, Berlin,
Herausforderungen beim Fahren virtueller Testkilometer. 8. IBS-Workshop Automotive Software Engineering Bernd Huber, Dr.
 Herausforderungen beim Fahren virtueller Testkilometer 8. IBS-Workshop Automotive Software Engineering Bernd Huber, Dr. Mirko Nentwig 2 Unsere Themen Motivation Prämisse Vision Anforderung Herausforderungen
Herausforderungen beim Fahren virtueller Testkilometer 8. IBS-Workshop Automotive Software Engineering Bernd Huber, Dr. Mirko Nentwig 2 Unsere Themen Motivation Prämisse Vision Anforderung Herausforderungen
MOBILITÄT NEU DENKEN Nutzerzentrierung als Erfolgsfaktor der neuen Mobilität
 MOBILITÄT NEU DENKEN Nutzerzentrierung als Erfolgsfaktor der neuen Mobilität Evolution in der Mobilität ZU FUSS KUTSCHE AUTO SMART UND ROBOTISIERT 1.0 2.0 3.0 4.0 Steinzeit Neuzeit Heute Morgen Effektiver,
MOBILITÄT NEU DENKEN Nutzerzentrierung als Erfolgsfaktor der neuen Mobilität Evolution in der Mobilität ZU FUSS KUTSCHE AUTO SMART UND ROBOTISIERT 1.0 2.0 3.0 4.0 Steinzeit Neuzeit Heute Morgen Effektiver,
AUTONOMES FAHREN TRENDS UND HERAUSFORDERUNGEN IN DER IKT FORSCHUNG
 AUTONOMES FAHREN TRENDS UND HERAUSFORDERUNGEN IN DER IKT FORSCHUNG Prof. Dr. Ing. J. Marius Zöllner FZI Forschungszentrum Informatik am Karlsruher Institut für Technologie FZI FORSCHUNGSZENTRUM INFORMATIK
AUTONOMES FAHREN TRENDS UND HERAUSFORDERUNGEN IN DER IKT FORSCHUNG Prof. Dr. Ing. J. Marius Zöllner FZI Forschungszentrum Informatik am Karlsruher Institut für Technologie FZI FORSCHUNGSZENTRUM INFORMATIK
Neue automobilität: Automatisierter Straßenverkehr der Zukunft
 Neue automobilität: Automatisierter Straßenverkehr der Zukunft Stefanie Baumann Bundeskongress Öffentliche Infrastruktur Berlin, 01.Dezember 2016 Die Zukunft der Mobilität ist elektrisch, vernetzt und
Neue automobilität: Automatisierter Straßenverkehr der Zukunft Stefanie Baumann Bundeskongress Öffentliche Infrastruktur Berlin, 01.Dezember 2016 Die Zukunft der Mobilität ist elektrisch, vernetzt und
Zukunft des Automobils
 Zukunft des Automobils Aktuelle Trends und Visionen VIRTUAL VEHICLE Research Center COMET K2 Competence Center - Initiated by the Federal Ministry of Transport, Innovation & Technology (BMVIT) and the
Zukunft des Automobils Aktuelle Trends und Visionen VIRTUAL VEHICLE Research Center COMET K2 Competence Center - Initiated by the Federal Ministry of Transport, Innovation & Technology (BMVIT) and the
Aktive und vorausschauende Sicherheitslösungen für ungeschützte Verkehrsteilnehmer
 Aktive und vorausschauende Sicherheitslösungen für ungeschützte Verkehrsteilnehmer GALILEO - Mehrwert für Verkehr und Mobilität? 1. 10. 2008, Technologiezentrum Salzkammergut G. Triebnig, EOX IT Services
Aktive und vorausschauende Sicherheitslösungen für ungeschützte Verkehrsteilnehmer GALILEO - Mehrwert für Verkehr und Mobilität? 1. 10. 2008, Technologiezentrum Salzkammergut G. Triebnig, EOX IT Services
Ethik und KI Beispiel autonomes Fahren
 Ethik und KI Beispiel autonomes Fahren Cebit 2018 Michael Mörike Integrata-Stiftung für humane Nutzung der IT Was ist autonomes Fahren? Fünf Stufen: 0. Fahrer macht alles selbst: beschleunigen, bremsen,
Ethik und KI Beispiel autonomes Fahren Cebit 2018 Michael Mörike Integrata-Stiftung für humane Nutzung der IT Was ist autonomes Fahren? Fünf Stufen: 0. Fahrer macht alles selbst: beschleunigen, bremsen,
Antriebs- und Kraftstoffstrategie - Roadmap automatisiertes Fahren
 Antriebs- und Kraftstoffstrategie - Roadmap automatisiertes Fahren Dr. Stefan Schmerbeck Außenbeziehungen und Nachhaltigkeit Zukunftstechnologien Volkswagen AG November 2016, Königslutter (ein) Ziel der
Antriebs- und Kraftstoffstrategie - Roadmap automatisiertes Fahren Dr. Stefan Schmerbeck Außenbeziehungen und Nachhaltigkeit Zukunftstechnologien Volkswagen AG November 2016, Königslutter (ein) Ziel der
Aus der Praxis für die Praxis
 Auf dem Weg zur digitalen Fabrik: Aus der Praxis für die Praxis 27. April 2017 Philippe Ramseier Geschäftsinhaber Autexis Herausforderungen Projekte Erfolgsfaktoren und Nutzen Fazit Eine Unternehmung,
Auf dem Weg zur digitalen Fabrik: Aus der Praxis für die Praxis 27. April 2017 Philippe Ramseier Geschäftsinhaber Autexis Herausforderungen Projekte Erfolgsfaktoren und Nutzen Fazit Eine Unternehmung,
Wirelss 2020 Das taktile Internet. Echtzeitfähige Car-to-Car Kommunikation
 Wirelss 2020 Das taktile Internet Echtzeitfähige Car-to-Car Kommunikation Frank Hofmann Robert Bosch GmbH Fr Forschung und Vorausentwicklung Hildesheim 1 Inhalt Motivation Verkehrssituation Nutzen von
Wirelss 2020 Das taktile Internet Echtzeitfähige Car-to-Car Kommunikation Frank Hofmann Robert Bosch GmbH Fr Forschung und Vorausentwicklung Hildesheim 1 Inhalt Motivation Verkehrssituation Nutzen von
Data Driven Automotive Techday. Tim Kalmer. Das E-Auto als Teil im Internet der Dinge. Fabian Kehle D LR MHP A Porsche Company
 Data Driven Automotive Techday Das E-Auto als Teil im Internet der Dinge Fabian Kehle Tim Kalmer 2016 MHP A Porsche Company D LR 1201 Vorab eine Feststellung. Das E-Auto wird kommen. 2016 Mieschke Hofmann
Data Driven Automotive Techday Das E-Auto als Teil im Internet der Dinge Fabian Kehle Tim Kalmer 2016 MHP A Porsche Company D LR 1201 Vorab eine Feststellung. Das E-Auto wird kommen. 2016 Mieschke Hofmann
Maximilian Naumann 1, Piotr F. Orzechowski 2, Christoph Burger 2, Ömer Sahin Tas 1, Christoph Stiller 1,2
 FZI FORSCHUNGSZENTRUM INFORMATIK Herausforderungen für die Verhaltensplanung kooperativer automatischer Fahrzeuge Maximilian Naumann 1, Piotr F. Orzechowski 2, Christoph Burger 2, Ömer Sahin Tas 1, Christoph
FZI FORSCHUNGSZENTRUM INFORMATIK Herausforderungen für die Verhaltensplanung kooperativer automatischer Fahrzeuge Maximilian Naumann 1, Piotr F. Orzechowski 2, Christoph Burger 2, Ömer Sahin Tas 1, Christoph
WENN AUTOS ALLEINE FAHREN... Ein kritischer Blick auf digitalisierte Mobilität und Fahrzeugtechnik
 WENN AUTOS ALLEINE FAHREN... Ein kritischer Blick auf digitalisierte Mobilität und Fahrzeugtechnik Carsten Weber Associated Partner MHP Management- und IT-Beratung GmbH l Ihr Rennteam. MHP Management-
WENN AUTOS ALLEINE FAHREN... Ein kritischer Blick auf digitalisierte Mobilität und Fahrzeugtechnik Carsten Weber Associated Partner MHP Management- und IT-Beratung GmbH l Ihr Rennteam. MHP Management-
Automotive-Innovationsforum 2015 Automatisiertes und vernetztes Fahren Chancen und Herausforderungen für die Automobilindustrie
 Automotive-Innovationsforum 2015 Automatisiertes und vernetztes Fahren Chancen und Herausforderungen für die Automobilindustrie Systematisierung des automatisierten und vernetzten Fahrens Status quo und
Automotive-Innovationsforum 2015 Automatisiertes und vernetztes Fahren Chancen und Herausforderungen für die Automobilindustrie Systematisierung des automatisierten und vernetzten Fahrens Status quo und
afas Entwicklung und Erprobung eines automatisch fahrerlos fahrenden Absicherungsfahrzeuges
 Kolloquium für Fortgeschrittene Karlsruher Erfahrungsaustausch Straßenbetrieb afas Entwicklung und Erprobung eines automatisch fahrerlos fahrenden Absicherungsfahrzeuges Gerd Riegelhuth, Susanne Schulz
Kolloquium für Fortgeschrittene Karlsruher Erfahrungsaustausch Straßenbetrieb afas Entwicklung und Erprobung eines automatisch fahrerlos fahrenden Absicherungsfahrzeuges Gerd Riegelhuth, Susanne Schulz
Halbleiter als Basis für Innovationen im Automobil. Peter Schiefer Division President Automotive Infineon Technologies AG
 Halbleiter als Basis für Innovationen im Automobil Peter Schiefer Division President Automotive Infineon Technologies AG Halbleiter in einem Auto: über 100 Steuergeräte aus bis zu 6.000 Halbleitern (HL)
Halbleiter als Basis für Innovationen im Automobil Peter Schiefer Division President Automotive Infineon Technologies AG Halbleiter in einem Auto: über 100 Steuergeräte aus bis zu 6.000 Halbleitern (HL)
Mensch und automatisches Fahrzeug eine neue Beziehung? Prof. Dr. Mark Vollrath
 Mensch und automatisches Fahrzeug eine neue Beziehung? Prof. Dr. Mark Vollrath Was ist überhaupt automatisches Fahren? Vision 1956 Quelle: VDA 21. November 2018 Prof. Dr. Mark Vollrath Mensch und Automation
Mensch und automatisches Fahrzeug eine neue Beziehung? Prof. Dr. Mark Vollrath Was ist überhaupt automatisches Fahren? Vision 1956 Quelle: VDA 21. November 2018 Prof. Dr. Mark Vollrath Mensch und Automation
Aspekte zur Innovationen der Bahn
 Mastertitelformat bearbeiten Aspekte zur Innovationen der Bahn Burkhard Stadlmann, Wien GSV-Forum, März 2018 FH OÖ, Fakultät für Technik, Wels Inhalt Mastertitelformat bearbeiten Teil 1 > Zweite Automatisiertes
Mastertitelformat bearbeiten Aspekte zur Innovationen der Bahn Burkhard Stadlmann, Wien GSV-Forum, März 2018 FH OÖ, Fakultät für Technik, Wels Inhalt Mastertitelformat bearbeiten Teil 1 > Zweite Automatisiertes
Autonomes Fahren. Aktuelle Entwicklungen. 2. Niederösterreichischer Fahrlehrertag Manfred Haider AIT Austrian Institute of Technology GmbH
 Autonomes Fahren Aktuelle Entwicklungen 2. Niederösterreichischer Fahrlehrertag 29.11.2016 Manfred Haider AIT Austrian Institute of Technology GmbH Begriffe zum Automatisierten Fahren Fahrer zu jeder Zeit
Autonomes Fahren Aktuelle Entwicklungen 2. Niederösterreichischer Fahrlehrertag 29.11.2016 Manfred Haider AIT Austrian Institute of Technology GmbH Begriffe zum Automatisierten Fahren Fahrer zu jeder Zeit
afas - automatisch fahrerlos fahrendes Absicherungsfahrzeug für Arbeitsstellen auf Autobahnen
 afas - automatisch fahrerlos fahrendes Absicherungsfahrzeug für Arbeitsstellen auf Autobahnen Version 01-00-00 www.afas-online.de Forschungsprojekt afas demonstriert die Projektergebnisse eines fahrerlos
afas - automatisch fahrerlos fahrendes Absicherungsfahrzeug für Arbeitsstellen auf Autobahnen Version 01-00-00 www.afas-online.de Forschungsprojekt afas demonstriert die Projektergebnisse eines fahrerlos
Echtzeitdatenanalyse für Risikomanagement im Finanzwesen
 Holger Eichelberger eichelberger@sse.uni-hildesheim.de Motivation Börsencrash als Finanzrisiko Dotcom-Blase (2000) Banken- und Finanzkrise (2007) Fukushima (2011) Griechenland (2015)??? SSE, University
Holger Eichelberger eichelberger@sse.uni-hildesheim.de Motivation Börsencrash als Finanzrisiko Dotcom-Blase (2000) Banken- und Finanzkrise (2007) Fukushima (2011) Griechenland (2015)??? SSE, University
MULTI-SENSOR KONZEPT EINSATZMÖGLICHKEITEN UND GRENZEN 09. MÄRZ 2018 RALF PFISTERER
 MULTI-SENSOR KONZEPT EINSATZMÖGLICHKEITEN UND GRENZEN 09. MÄRZ 2018 RALF PFISTERER Agenda BCDS Wer ist das? MSK Was steckt dahinter? Grenzen bitte beachten! Zusammenfassung und Ausblick 2 Transport Data
MULTI-SENSOR KONZEPT EINSATZMÖGLICHKEITEN UND GRENZEN 09. MÄRZ 2018 RALF PFISTERER Agenda BCDS Wer ist das? MSK Was steckt dahinter? Grenzen bitte beachten! Zusammenfassung und Ausblick 2 Transport Data
Bewegungsplanung für den vierbeinigen Roboter AMEE. Björn Bettzüche
 Bewegungsplanung für den vierbeinigen Roboter AMEE Einleitung Vergleichbare Arbeiten Zusammenfassung Referenzen Projekt AMEE SAR 4 intelligente Beine SLAM Sicheres Navigieren 4 [5] 5 Bildbasiert zu ungenau
Bewegungsplanung für den vierbeinigen Roboter AMEE Einleitung Vergleichbare Arbeiten Zusammenfassung Referenzen Projekt AMEE SAR 4 intelligente Beine SLAM Sicheres Navigieren 4 [5] 5 Bildbasiert zu ungenau
Sicher Fahren und Transportieren
 Sicher Fahren und Transportieren Dr. Frank Oppenheimer OFFIS - Institut für Informatik Oldenburg Kongress über betrieblichen Arbeits- und Gesundheitsschutz, Oldenburg, 2.9.2010 2 Logistik und Automation
Sicher Fahren und Transportieren Dr. Frank Oppenheimer OFFIS - Institut für Informatik Oldenburg Kongress über betrieblichen Arbeits- und Gesundheitsschutz, Oldenburg, 2.9.2010 2 Logistik und Automation
Urban Infrastructure & Mobility Solutions Innovative Unternehmens- und Standortentwicklungen im Wandel urbaner Mobilität
 Urban Infrastructure & Mobility Solutions Innovative Unternehmens- und Standortentwicklungen im Wandel urbaner Mobilität Vernetztes Automatisiertes Fahren - Use Cases und Verbreitungsszenarien Hannover,
Urban Infrastructure & Mobility Solutions Innovative Unternehmens- und Standortentwicklungen im Wandel urbaner Mobilität Vernetztes Automatisiertes Fahren - Use Cases und Verbreitungsszenarien Hannover,
Unterstützung des hochautomatisierten Fahrens durch ein Backend Überblick und Motivation
 Unterstützung des hochautomatisierten Fahrens durch ein Backend Überblick und Motivation Dr.-Ing. Lukas Klejnowski Robert Bosch GmbH Agenda Einleitung: Aufgaben des Safety Servers Was ist eine HAF-Karte?
Unterstützung des hochautomatisierten Fahrens durch ein Backend Überblick und Motivation Dr.-Ing. Lukas Klejnowski Robert Bosch GmbH Agenda Einleitung: Aufgaben des Safety Servers Was ist eine HAF-Karte?
Digitale Transformation von Wirtschaft und Gesellschaft
 acatech DEUTSCHE AKADEMIE DER TECHNIKWISSENSCHAFTEN Digitale Transformation von Wirtschaft und Gesellschaft Johannes Melzer Berlin, 25. Januar 2017 Megatrend Digitalisierung Neue Aspekte > SmartX: Digital
acatech DEUTSCHE AKADEMIE DER TECHNIKWISSENSCHAFTEN Digitale Transformation von Wirtschaft und Gesellschaft Johannes Melzer Berlin, 25. Januar 2017 Megatrend Digitalisierung Neue Aspekte > SmartX: Digital
Technologie für automatisiertes Fahren nutzergerecht optimiert. Projektvorstellung
 Technologie für automatisiertes Fahren nutzergerecht optimiert Projektvorstellung BMWi-BMBF-Fachtagung Automatisiertes und vernetztes Fahren Dr. Britta Michel, MAN Truck & Bus AG Technologie für automatisiertes
Technologie für automatisiertes Fahren nutzergerecht optimiert Projektvorstellung BMWi-BMBF-Fachtagung Automatisiertes und vernetztes Fahren Dr. Britta Michel, MAN Truck & Bus AG Technologie für automatisiertes
Wohin fahren sie denn? Erfassung von Verkehrsteilnehmern und ihrer Interaktion an urbanen Straßenkreuzungen
 DLR.de Folie 1 Wohin fahren sie denn? Erfassung von Verkehrsteilnehmern und ihrer Interaktion an urbanen Straßenkreuzungen Dr.-Ing. Marek Junghans DLR.de Folie 2 Inhalt Motivation Objekterkennung, -klassifizierung
DLR.de Folie 1 Wohin fahren sie denn? Erfassung von Verkehrsteilnehmern und ihrer Interaktion an urbanen Straßenkreuzungen Dr.-Ing. Marek Junghans DLR.de Folie 2 Inhalt Motivation Objekterkennung, -klassifizierung
Vernetztes Fahrzeug Was weiß mein Auto über seine Umwelt?
 Vernetztes Fahrzeug Was weiß mein Auto über seine Umwelt? Tobias Rehder Master of Science Maschinenbau / Mechatronik Projektmanager Vernetztes Fahrzeug Bismarckstr. 142 47057 Duisburg Im Auto der Zukunft
Vernetztes Fahrzeug Was weiß mein Auto über seine Umwelt? Tobias Rehder Master of Science Maschinenbau / Mechatronik Projektmanager Vernetztes Fahrzeug Bismarckstr. 142 47057 Duisburg Im Auto der Zukunft
FAHRERASSISTENZ UND AUTOMATISIERUNG
 DIE NEUE FREUDE AM FAHREN: BEGEISTERND, ÖKONOMISCH, BEGEHRENSWERT Prof. Klaus Kompass, DVR-Forum, 07.12.2015 FAHRERASSISTENZ UND AUTOMATISIERUNG TECHNISCHE MÖGLICHKEITEN (UND GRENZEN) ZUR REDUZIERUNG VON
DIE NEUE FREUDE AM FAHREN: BEGEISTERND, ÖKONOMISCH, BEGEHRENSWERT Prof. Klaus Kompass, DVR-Forum, 07.12.2015 FAHRERASSISTENZ UND AUTOMATISIERUNG TECHNISCHE MÖGLICHKEITEN (UND GRENZEN) ZUR REDUZIERUNG VON
Gesellschaft Mobilität Technik: Global unterwegs Zürich, 22. Juni 2016 Autonomes Fahren Mobilitätskonzept der Zukunft?
 Gesellschaft Mobilität Technik: Global unterwegs Zürich, 22. Juni 2016 Autonomes Fahren Mobilitätskonzept der Zukunft? Prof. Dr. Barbara Lenz DLR Institut für Verkehrsforschung, Berlin-Adlershof Humboldt
Gesellschaft Mobilität Technik: Global unterwegs Zürich, 22. Juni 2016 Autonomes Fahren Mobilitätskonzept der Zukunft? Prof. Dr. Barbara Lenz DLR Institut für Verkehrsforschung, Berlin-Adlershof Humboldt
IAS Ringvorlesung 21.11.2013
 IAS Ringvorlesung 21.11.2013 Hochautomatisiertes Fahren Status Quo und Zukunftsvisionen Dipl.-Ing. Marian Zeyen Kooperationsprojekt Hochautomatisiertes Fahren Vorstellung Dipl.-Ing. Marian Zeyen Geboren:
IAS Ringvorlesung 21.11.2013 Hochautomatisiertes Fahren Status Quo und Zukunftsvisionen Dipl.-Ing. Marian Zeyen Kooperationsprojekt Hochautomatisiertes Fahren Vorstellung Dipl.-Ing. Marian Zeyen Geboren:
LOKALE REVOLUTIONIZING MOBILITÄT REVOLUTIONIEREN COPYRIGHT 2016 MOOVIT
 LOKALE REVOLUTIONIZING MOBILITÄT REVOLUTIONIEREN LOCAL MOBILITY COPYRIGHT 2016 MOOVIT Agenda 1) Globale Trends 2) Was ist Moovit? 3) Crowdsourcing im ÖPNV 4) Partnerschaften Wachstum der Städte: Urbanisierung
LOKALE REVOLUTIONIZING MOBILITÄT REVOLUTIONIEREN LOCAL MOBILITY COPYRIGHT 2016 MOOVIT Agenda 1) Globale Trends 2) Was ist Moovit? 3) Crowdsourcing im ÖPNV 4) Partnerschaften Wachstum der Städte: Urbanisierung
Informationstag zum 3. Call Galileo im 6. EU Forschungsrahmenprogramm - Galileo aus Sicht des deutschen Forschungsprogrammes Mobilität und Verkehr
 Galileo und Mobiltät und Verkehr Informationstag zum 3. Call Galileo im 6. EU Forschungsrahmenprogramm - Galileo aus Sicht des deutschen Forschungsprogrammes Mobilität und Verkehr 1 TÜV Management Systems
Galileo und Mobiltät und Verkehr Informationstag zum 3. Call Galileo im 6. EU Forschungsrahmenprogramm - Galileo aus Sicht des deutschen Forschungsprogrammes Mobilität und Verkehr 1 TÜV Management Systems
Automatisierung und Vernetzung Einführung und Rahmenbedingungen Symposium Automatisiertes und vernetztes Fahren schöne neue Welt!? Berlin 20.
 Automatisierung und Vernetzung Einführung und Rahmenbedingungen Symposium Automatisiertes und vernetztes Fahren schöne neue Welt!? Berlin 20. November 2018 Marko Gustke Schlüsseltreiber für die Mobilität
Automatisierung und Vernetzung Einführung und Rahmenbedingungen Symposium Automatisiertes und vernetztes Fahren schöne neue Welt!? Berlin 20. November 2018 Marko Gustke Schlüsseltreiber für die Mobilität
Validierung der Umfelderkennung für hochautomatisiertes Fahren
 Validierung der Umfelderkennung für hochautomatisiertes Fahren VIRTUAL VEHICLE Research Center Dr. Christian Schwarzl Head of Dependable Systems Group Virtual Vehicle Virtual Vehicle Forschungszentrum
Validierung der Umfelderkennung für hochautomatisiertes Fahren VIRTUAL VEHICLE Research Center Dr. Christian Schwarzl Head of Dependable Systems Group Virtual Vehicle Virtual Vehicle Forschungszentrum
Herzlich willkommen: #ITTage16 Der IT Hub IT Service Management in der digitalen Welt. Ihr Trainer: Markus Schweizer, Associate Partner CSC Schweiz
 1 Herzlich willkommen: #ITTage16 Der IT Hub IT Service Management in der digitalen Welt Ihr Trainer: Markus Schweizer, Associate Partner CSC Schweiz Die Digitale Transformation der Welt Reale Welt Virtuelle
1 Herzlich willkommen: #ITTage16 Der IT Hub IT Service Management in der digitalen Welt Ihr Trainer: Markus Schweizer, Associate Partner CSC Schweiz Die Digitale Transformation der Welt Reale Welt Virtuelle
Zukunft des Automobils
 Zukunft des Automobils Aktuelle Trends und Visionen VIRTUAL VEHICLE Research Center COMET K2 Competence Center - Initiated by the Federal Ministry of Transport, Innovation & Technology (BMVIT) and the
Zukunft des Automobils Aktuelle Trends und Visionen VIRTUAL VEHICLE Research Center COMET K2 Competence Center - Initiated by the Federal Ministry of Transport, Innovation & Technology (BMVIT) and the
DEUTSCH. Pulse. by Schlemmer
 DEUTSCH Pulse by Schlemmer Technologie ist unsere Leidenschaft. Die Schlemmer Group Unser Herz schlägt in Bayern. Seit 60 Jahren. Mit Hauptsitz in München, entwickeln, produzieren und vertreiben wir hochspezifische
DEUTSCH Pulse by Schlemmer Technologie ist unsere Leidenschaft. Die Schlemmer Group Unser Herz schlägt in Bayern. Seit 60 Jahren. Mit Hauptsitz in München, entwickeln, produzieren und vertreiben wir hochspezifische
Capturing Reality Hoch aufgelöste statische und dynamische Kartierung für hochautomatisiertes Fahren.
 Capturing Reality Hoch aufgelöste statische und dynamische Kartierung für hochautomatisiertes Fahren www.joanneum.at/digital Wozu braucht mein Auto eine Karte? 2 Mensch als Fahrer: Karte wird zum Navigieren
Capturing Reality Hoch aufgelöste statische und dynamische Kartierung für hochautomatisiertes Fahren www.joanneum.at/digital Wozu braucht mein Auto eine Karte? 2 Mensch als Fahrer: Karte wird zum Navigieren
Potenziale aktiver Sicherheitssysteme
 Potenziale aktiver Sicherheitssysteme Prof. Dr. Stefan Gies Expertenforum, November 2017 Entwicklung des Unfallgeschehens in D 2 08. November 2017 Prof. Dr. Stefan Gies, Expertenforum Entwicklung des Unfallgeschehens
Potenziale aktiver Sicherheitssysteme Prof. Dr. Stefan Gies Expertenforum, November 2017 Entwicklung des Unfallgeschehens in D 2 08. November 2017 Prof. Dr. Stefan Gies, Expertenforum Entwicklung des Unfallgeschehens
Statistiken. Features
 Bild 5.6_1 Statistiken 2001 waren 17 % der Unfälle in Deutschland Auffahrunfälle mit dem vorausfahrenden Fahrzeug (Quelle: Statistisches Bundesamt) Eine Studie stellte eine um 40 % gesteigerte Reaktionsfähigkeit
Bild 5.6_1 Statistiken 2001 waren 17 % der Unfälle in Deutschland Auffahrunfälle mit dem vorausfahrenden Fahrzeug (Quelle: Statistisches Bundesamt) Eine Studie stellte eine um 40 % gesteigerte Reaktionsfähigkeit
Information technology for active perception: Itap
 Information technology for active perception: Dr.-Ing. Erhardt Barth Institut für Neuro- und Bioinformatik (), Lübeck In Zusammenarbeit mit Allgemeine Psychologie, Giessen Experimental Ophtalmology, Groningen
Information technology for active perception: Dr.-Ing. Erhardt Barth Institut für Neuro- und Bioinformatik (), Lübeck In Zusammenarbeit mit Allgemeine Psychologie, Giessen Experimental Ophtalmology, Groningen
Automatisiertes Fahren im Individualverkehr
 Stadt Ingolstadt Oberbürgermeister Dr. Christian Lösel Dr. Miklos Kiss Automatisiertes Fahren im Individualverkehr Perspektiven aus Ingolstädter Sicht 1 Unterschied zwischen Traum und Realität 2 Wünsche
Stadt Ingolstadt Oberbürgermeister Dr. Christian Lösel Dr. Miklos Kiss Automatisiertes Fahren im Individualverkehr Perspektiven aus Ingolstädter Sicht 1 Unterschied zwischen Traum und Realität 2 Wünsche
INDUSTRIE 4.0 OUT OF THE BOX DENKEN FÜR SMARTE PRODUKTE UND GESCHÄFTSMODELLE DR.-ING. ARNE ENGELBRECHT
 INDUSTRIE 4.0 OUT OF THE BOX DENKEN FÜR SMARTE PRODUKTE UND GESCHÄFTSMODELLE DR.-ING. ARNE ENGELBRECHT 1 DIE GESCHICHTE VON MAX PLANCK UND SEINEM CHAUFFEUR Max Planck sein Chauffeur 2 VIELE SCHLAGWORTE
INDUSTRIE 4.0 OUT OF THE BOX DENKEN FÜR SMARTE PRODUKTE UND GESCHÄFTSMODELLE DR.-ING. ARNE ENGELBRECHT 1 DIE GESCHICHTE VON MAX PLANCK UND SEINEM CHAUFFEUR Max Planck sein Chauffeur 2 VIELE SCHLAGWORTE
Unternehmenspräsentation LEONI-Gruppe
 Unternehmenspräsentation LEONI-Gruppe Agenda Spotlights Vision Zahlen Märkte und Produkte Innovation und Kundennutzen 3 Unternehmenspräsentation Spotlights Aktuelle Themen aus der LEONI-Gruppe Produktinnovation
Unternehmenspräsentation LEONI-Gruppe Agenda Spotlights Vision Zahlen Märkte und Produkte Innovation und Kundennutzen 3 Unternehmenspräsentation Spotlights Aktuelle Themen aus der LEONI-Gruppe Produktinnovation
Industrie 4.0 & Digitale Innovation Digitales Unternehmen Chancen der Digitalisierung für Unternehmen Handelskammer Bozen
 Rüdiger Nitz Innovation Engineer Industrie 4.0 & Digitale Innovation Digitales Unternehmen Chancen der Digitalisierung für Unternehmen Handelskammer Bozen Wie entsteht innovatives Denken? Es ist eine Geisteshaltung,
Rüdiger Nitz Innovation Engineer Industrie 4.0 & Digitale Innovation Digitales Unternehmen Chancen der Digitalisierung für Unternehmen Handelskammer Bozen Wie entsteht innovatives Denken? Es ist eine Geisteshaltung,
Mercedes-Benz Truck Connectivity im Wandel
 Mercedes-Benz Truck Connectivity im Wandel 30th Internationale AVL Konferenz Motor & Umwelt" 2018 Graz, 7.-8. Juni 2018, Ralf Traub Der Kraftstoffverbrauch von Lkws wird heute maßgeblich durch den Fahrstil
Mercedes-Benz Truck Connectivity im Wandel 30th Internationale AVL Konferenz Motor & Umwelt" 2018 Graz, 7.-8. Juni 2018, Ralf Traub Der Kraftstoffverbrauch von Lkws wird heute maßgeblich durch den Fahrstil
EFS Deep Learning für das Fahren der Zukunft. Anton Junker
 EFS Deep Learning für das Fahren der Zukunft Anton Junker Wer ist die EFS? Wer sind wir? Unternehmen Gründung 2009 Standort Ingolstadt/Wolfsburg Beteiligung GIGATRONIK Gruppe (51%) Audi Electronics Venture
EFS Deep Learning für das Fahren der Zukunft Anton Junker Wer ist die EFS? Wer sind wir? Unternehmen Gründung 2009 Standort Ingolstadt/Wolfsburg Beteiligung GIGATRONIK Gruppe (51%) Audi Electronics Venture
Schnellere Innovationszyklen für Elektroniksysteme entlang der Automobilwertschöpfungskette
 Schnellere Innovationszyklen für Elektroniksysteme entlang der Automobilwertschöpfungskette : Wie muss sich das Zusammenspiel von Requirements Engineering und den anderen Systems Engineering-Disziplinen
Schnellere Innovationszyklen für Elektroniksysteme entlang der Automobilwertschöpfungskette : Wie muss sich das Zusammenspiel von Requirements Engineering und den anderen Systems Engineering-Disziplinen
Innovationen und neue Entwicklungen auf dem Fahrradmarkt
 auf dem Fahrradmarkt Dr. Gregor Dasbach Bosch ebike Systems Stuttgart, 11.11.2014 1 Megatrends: e-mobility Urbanization Energy Climate Protection Technology Resources Demography Energy Storage ebike 2
auf dem Fahrradmarkt Dr. Gregor Dasbach Bosch ebike Systems Stuttgart, 11.11.2014 1 Megatrends: e-mobility Urbanization Energy Climate Protection Technology Resources Demography Energy Storage ebike 2
Innovative Bahnübergangstechnik mit optischen Systemen. Dipl.-Ing. Markus Pelz, DLR
 Innovative Bahnübergangstechnik mit optischen Systemen Dipl.-Ing. Markus Pelz, DLR Innovative Bahnübergangstechnik > 8. Oktober 2008 > Folie 1 Inhalt Motivation Innovative Bahnübergangstechnik Handlungsbedarf
Innovative Bahnübergangstechnik mit optischen Systemen Dipl.-Ing. Markus Pelz, DLR Innovative Bahnübergangstechnik > 8. Oktober 2008 > Folie 1 Inhalt Motivation Innovative Bahnübergangstechnik Handlungsbedarf
A Big Data Change Detection System. Carsten Lanquillon und Sigurd Schacht
 A Big Data Change Detection System Carsten Lanquillon und Sigurd Schacht Digitale Transformation in Unternehmen u Umfassende Erfassung, Speicherung und Verfügbarkeit von Daten à Big Data Quelle: Rolland
A Big Data Change Detection System Carsten Lanquillon und Sigurd Schacht Digitale Transformation in Unternehmen u Umfassende Erfassung, Speicherung und Verfügbarkeit von Daten à Big Data Quelle: Rolland
Straßenbahn in Zukunft
 Maren Henzel, M.Sc. Timm Ruppert, M.Sc. Prof. Dr. Hermann Winner Straßenbahn in Zukunft 2 Was die Straßenbahn vom Auto lernen kann fashionweek-berlin.mercedes-benz.de Fußgängerschutzsystem Cruise Control
Maren Henzel, M.Sc. Timm Ruppert, M.Sc. Prof. Dr. Hermann Winner Straßenbahn in Zukunft 2 Was die Straßenbahn vom Auto lernen kann fashionweek-berlin.mercedes-benz.de Fußgängerschutzsystem Cruise Control
Mercedes-Benz testet automatisierte Fahrfunktionen in Shanghai
 Mercedes-Benz testet automatisierte Fahrfunktionen in Shanghai Zebrastreifen auf der Autobahn, eigene Tempolimits je Fahrspur, Verkehrsschilder mit chinesischen Schriftzeichen je Fahrspur der Straßenverkehr
Mercedes-Benz testet automatisierte Fahrfunktionen in Shanghai Zebrastreifen auf der Autobahn, eigene Tempolimits je Fahrspur, Verkehrsschilder mit chinesischen Schriftzeichen je Fahrspur der Straßenverkehr
Das vernetzte Fahrzeug als erster Schritt zur Automatisierung: die Anforderungen an Infrastrukturbetreiber
 Das vernetzte Fahrzeug als erster Schritt zur Automatisierung: die Anforderungen an Infrastrukturbetreiber Wolfram Klar wolfram.klar@austriatech.at Einleitung erste Automatisierungsfunktionen bereits 1957
Das vernetzte Fahrzeug als erster Schritt zur Automatisierung: die Anforderungen an Infrastrukturbetreiber Wolfram Klar wolfram.klar@austriatech.at Einleitung erste Automatisierungsfunktionen bereits 1957
Energie-Management für Drive-by-Wire Fahrzeuge Ergebnisse des EU-Projektes SPARC Dr. Günther Bauer Dr. Armin Sulzmann
 Energie-Management für Drive-by-Wire Fahrzeuge Ergebnisse des EU-Projektes SPARC Dr. Günther Bauer Dr. Armin Sulzmann iq POWER Deutschland GmbH DAIMLER AG SPARC-Projekt Das Unfälle vermeidende Fahrzeug
Energie-Management für Drive-by-Wire Fahrzeuge Ergebnisse des EU-Projektes SPARC Dr. Günther Bauer Dr. Armin Sulzmann iq POWER Deutschland GmbH DAIMLER AG SPARC-Projekt Das Unfälle vermeidende Fahrzeug
Wie Unternehmen von Geofernerkundungsdaten profitieren können
 Wie Unternehmen von Geofernerkundungsdaten profitieren können 1. Teil Dr. André Hollstein andre.hollstein@gfz-potsdam.de 2. Teil Fortsetzung: Dr. Mike Sips sips@gfz-potsdam.de Inhalt (Teil 1.) Kurzvorstellung
Wie Unternehmen von Geofernerkundungsdaten profitieren können 1. Teil Dr. André Hollstein andre.hollstein@gfz-potsdam.de 2. Teil Fortsetzung: Dr. Mike Sips sips@gfz-potsdam.de Inhalt (Teil 1.) Kurzvorstellung
AUSWIRKUNGEN DES AUTONOMEN FAHRENS AUF DEN ÖFFENTLICHEN VERKEHR
 AUSWIRKUNGEN DES AUTONOMEN FAHRENS AUF DEN ÖFFENTLICHEN VERKEHR Dr. Till Ackermann, VDV Sebastian Krieg, DB Mobility Logistics AG ACK/ KRI AUTONOMES FAHREN Thesen 1 wird Realität werden früher und anders
AUSWIRKUNGEN DES AUTONOMEN FAHRENS AUF DEN ÖFFENTLICHEN VERKEHR Dr. Till Ackermann, VDV Sebastian Krieg, DB Mobility Logistics AG ACK/ KRI AUTONOMES FAHREN Thesen 1 wird Realität werden früher und anders
IST DAS AUTONOME FAHRZEUG SICHER(ER)?
?") youtube.com/watch?v=ollfk8osnem Folien: https://dhgo.to/sicherer IST DAS AUTONOME FAHRZEUG SICHER(ER)? Dr. Dominik Herrmann // Universität Hamburg Einteilung der deutschen Bundesanstalt für Straßenwesen
youtube.com/watch?v=ollfk8osnem Folien: https://dhgo.to/sicherer IST DAS AUTONOME FAHRZEUG SICHER(ER)? Dr. Dominik Herrmann // Universität Hamburg Einteilung der deutschen Bundesanstalt für Straßenwesen
Digitalisierung der Welt und ihr Möglichkeiten am Beispiel der Innovationsplattform E-Bus
 Digitalisierung der Welt und ihr Möglichkeiten am Beispiel der Innovationsplattform E-Bus Regensburg, 21.11.2017, Ulrich Haböck Bertrandt Ingenieurbüro GmbH Betriebsstätte Regensburg 0 Digitalisierung
Digitalisierung der Welt und ihr Möglichkeiten am Beispiel der Innovationsplattform E-Bus Regensburg, 21.11.2017, Ulrich Haböck Bertrandt Ingenieurbüro GmbH Betriebsstätte Regensburg 0 Digitalisierung
It s all Roadmap - wie bringt man Industrie 4.0 auf die Strasse?
 It s all Roadmap - wie bringt man Industrie 4.0 auf die Strasse? Freitag, 09. Okt 2015 Der Referent Dipl. Wi. - Ing. Thomas Schmischke Geschäftsstellenleiter Cpro Industry Projects & Solutions GmbH und
It s all Roadmap - wie bringt man Industrie 4.0 auf die Strasse? Freitag, 09. Okt 2015 Der Referent Dipl. Wi. - Ing. Thomas Schmischke Geschäftsstellenleiter Cpro Industry Projects & Solutions GmbH und
China Ein Labor für die Stadt für Morgen?
 China Ein Labor für die Stadt für Morgen? UBA Forum 2017 mobil & nachhaltig Die Stadt für Morgen 30. und 31. März 2017, Berlin Page 1 Ausgangslage und Annahmen - Bis zum Jahr 2025 350 Million Chinesen
China Ein Labor für die Stadt für Morgen? UBA Forum 2017 mobil & nachhaltig Die Stadt für Morgen 30. und 31. März 2017, Berlin Page 1 Ausgangslage und Annahmen - Bis zum Jahr 2025 350 Million Chinesen
Innovationsmanagement. Internet of Things (IoT) Zühlke. Business. Things. Internet. Systems Engineering
 Zühlke. Business. Things. Internet. Systems Engineering") Business Zühlke Systems Engineering Things Innovationsmanagement Internet Internet of Things (IoT) Folie 1 Bildquelle Universal Music 2015 Copyright www.greenprophet.com Life Cycle Management «Beton vs.
Business Zühlke Systems Engineering Things Innovationsmanagement Internet Internet of Things (IoT) Folie 1 Bildquelle Universal Music 2015 Copyright www.greenprophet.com Life Cycle Management «Beton vs.
Fachausschuss Solare Mobilität
 Fachausschuss Solare Mobilität Tomi Engel 1 Nachhaltigkeit und moderner Verkehr in der Mitte Berlins Tomi Engel 2 Nachhaltige Mobilität... in Berlin 3 Nachhaltige Mobilität... Focus "Auto" 4 Stadtplanung
Fachausschuss Solare Mobilität Tomi Engel 1 Nachhaltigkeit und moderner Verkehr in der Mitte Berlins Tomi Engel 2 Nachhaltige Mobilität... in Berlin 3 Nachhaltige Mobilität... Focus "Auto" 4 Stadtplanung
Smart Mobility Selbstfahrende Minibusse im Personennahverkehr
 DI Dr. Karl Rehrl und Univ.-Doz. Dr. Siegfried Reich Smart Mobility Selbstfahrende Minibusse im Personennahverkehr OCG Jahresopening, 24. Jänner 2017 Die Story: Last-Mile im öffentlichen Personennahverkehr!
DI Dr. Karl Rehrl und Univ.-Doz. Dr. Siegfried Reich Smart Mobility Selbstfahrende Minibusse im Personennahverkehr OCG Jahresopening, 24. Jänner 2017 Die Story: Last-Mile im öffentlichen Personennahverkehr!
Internationaler Automobil Kongress
 Internationaler Automobil Kongress Die Digitalisierung der Mobilität Chancen und Risiken auf dem Weg zum pilotierten Fahren 17. Oktober 2016 Thomas Müller Leiter Entwicklung Brems-, Lenk-, Fahrerassistenzsysteme,
Internationaler Automobil Kongress Die Digitalisierung der Mobilität Chancen und Risiken auf dem Weg zum pilotierten Fahren 17. Oktober 2016 Thomas Müller Leiter Entwicklung Brems-, Lenk-, Fahrerassistenzsysteme,
Regionaltage Human Centric Workplace Fujitsu
 Regionaltage 2015 Human Centric Workplace 2020 0 2015 Fujitsu Agenda Die Veränderung der Arbeitswelt Ableitung von Management Anforderungen und die Beschaffung von IT- Infrastruktur Sicherheit für Daten
Regionaltage 2015 Human Centric Workplace 2020 0 2015 Fujitsu Agenda Die Veränderung der Arbeitswelt Ableitung von Management Anforderungen und die Beschaffung von IT- Infrastruktur Sicherheit für Daten
KONZEPTION SOWIE UMSETZUNG EINER TRAININGSUMGEBUNG ZUR QUALIFIKATION VON INSTANDHALTUNGSPERSONAL IM UMFELD VON INDUSTRIE 4.0
 KONZEPTION SOWIE UMSETZUNG EINER TRAININGSUMGEBUNG ZUR QUALIFIKATION VON INSTANDHALTUNGSPERSONAL IM UMFELD VON INDUSTRIE 4.0 Konferenz Zukunft der Arbeit Stuttgart, 19. September 2016 Christoph Berger,
KONZEPTION SOWIE UMSETZUNG EINER TRAININGSUMGEBUNG ZUR QUALIFIKATION VON INSTANDHALTUNGSPERSONAL IM UMFELD VON INDUSTRIE 4.0 Konferenz Zukunft der Arbeit Stuttgart, 19. September 2016 Christoph Berger,
Automatisiertes Fahren Entwicklungen und Herausforderungen
 Automatisiertes Fahren Entwicklungen und Herausforderungen Dr. Anton Fuchs VIRTUAL VEHICLE Research Center GSV Forum, 09.05.2017 VIRTUAL VEHICLE Inhalte Warum ist automatisiertes Fahren ein wesentliches
Automatisiertes Fahren Entwicklungen und Herausforderungen Dr. Anton Fuchs VIRTUAL VEHICLE Research Center GSV Forum, 09.05.2017 VIRTUAL VEHICLE Inhalte Warum ist automatisiertes Fahren ein wesentliches
Big Data. Timo HARTMANN 1. Technische Universität Berlin, Fachgebiet Systemtechnik baulicher Anlagen, Institut für Bauingenieurwesen, Berlin
 Fachtagung Bauwerksdiagnose 2018 Big Data Timo HARTMANN 1 1 Technische Universität Berlin, Fachgebiet Systemtechnik baulicher Anlagen, Institut für Bauingenieurwesen, Berlin Kontakt E-Mail: timo.hartmann@tu-berlin.de
Fachtagung Bauwerksdiagnose 2018 Big Data Timo HARTMANN 1 1 Technische Universität Berlin, Fachgebiet Systemtechnik baulicher Anlagen, Institut für Bauingenieurwesen, Berlin Kontakt E-Mail: timo.hartmann@tu-berlin.de
Aktive Gefahrenbremsung unter Berücksichtigung nutzfahrzeugspezifischer Aspekte
 unter Berücksichtigung nutzfahrzeugspezifischer Aspekte Markus Brummer Walter Schwertberger Karlheinz Dörner MAN Nutzfahrzeuge AG MAN Nutzfahrzeuge AG Markus Brummer Aktive Gefahrenbremsung 15.04.2010
unter Berücksichtigung nutzfahrzeugspezifischer Aspekte Markus Brummer Walter Schwertberger Karlheinz Dörner MAN Nutzfahrzeuge AG MAN Nutzfahrzeuge AG Markus Brummer Aktive Gefahrenbremsung 15.04.2010




Autonomes Fahren Können, wollen, sollen wir uns diese
 Autonomes Fahren Können, wollen, sollen wir uns diese Prof. Dr. Stefan Heinemann 25.04.2017 Carmeleon, Essen Mobilitätszukunft wünschen? 2050 2020 Heute Gestern rd. 0,7 Mio. Staumeldungen 2016 rd. 0,4
Autonomes Fahren Können, wollen, sollen wir uns diese Prof. Dr. Stefan Heinemann 25.04.2017 Carmeleon, Essen Mobilitätszukunft wünschen? 2050 2020 Heute Gestern rd. 0,7 Mio. Staumeldungen 2016 rd. 0,4
Unternehmenspräsentation LEONI-Gruppe
 Unternehmenspräsentation LEONI-Gruppe Agenda Spotlights Vision Zahlen Märkte und Produkte Innovation und Kundennutzen 4 Spotlights Aktuelle Themen aus der LEONI-Gruppe Kooperation mit Diehl Systemlösungen
Unternehmenspräsentation LEONI-Gruppe Agenda Spotlights Vision Zahlen Märkte und Produkte Innovation und Kundennutzen 4 Spotlights Aktuelle Themen aus der LEONI-Gruppe Kooperation mit Diehl Systemlösungen
FAMOS Galileo for Future AutoMOtive Systems
 FAMOS Galileo for Future AutoMOtive Systems Dr. Lutz Junge Wolfsburg, 08.09.2009 Der Straßenverkehr wächst! Situation und Entwicklung in Deutschland und Europa Hauptprobleme: Unfalltote 2007 EU-27 42.485
FAMOS Galileo for Future AutoMOtive Systems Dr. Lutz Junge Wolfsburg, 08.09.2009 Der Straßenverkehr wächst! Situation und Entwicklung in Deutschland und Europa Hauptprobleme: Unfalltote 2007 EU-27 42.485
Trends in Transport und Logistik und mögliche Auswirkungen auf den Speditionsalltag 2027
 Trends in Transport und Logistik und mögliche Auswirkungen auf den Speditionsalltag 2027 Steffen Kaup, Zukunftsforscher Mögliche Zukunftsvisionen: Transport und Logistik Prognose des weltweiten Transportvolumens
Trends in Transport und Logistik und mögliche Auswirkungen auf den Speditionsalltag 2027 Steffen Kaup, Zukunftsforscher Mögliche Zukunftsvisionen: Transport und Logistik Prognose des weltweiten Transportvolumens
Neu. Sicht und Sicherheit Fahrzeug-Kamerasysteme
 Neu Your Expert in Parts Rundumsicht Ob Sie einen Lkw, Bus, Mähdrescher oder einen Pkw fahren, immer ist es wichtig, alle Hindernisse und Gefahren rechtzeitig zu erkennen, um richtig reagieren zu können.
Neu Your Expert in Parts Rundumsicht Ob Sie einen Lkw, Bus, Mähdrescher oder einen Pkw fahren, immer ist es wichtig, alle Hindernisse und Gefahren rechtzeitig zu erkennen, um richtig reagieren zu können.
Abfälle der Zukunft: Komponenten der Elektromobilität
 Abfälle der Zukunft: Komponenten der Elektromobilität, Lehrstuhl für Rohstoffaufbereitung und Recycling 30.06.2015 1 Gliederung Einführung Traktionsbatterien, Elektromotoren & Leistungselektronik Rahmenbedingungen
Abfälle der Zukunft: Komponenten der Elektromobilität, Lehrstuhl für Rohstoffaufbereitung und Recycling 30.06.2015 1 Gliederung Einführung Traktionsbatterien, Elektromotoren & Leistungselektronik Rahmenbedingungen
Strukturierte Verbesserung der IT-Sicherheit durch den Aufbau eines ISMS nach ISO 27001
 Strukturierte Verbesserung der IT-Sicherheit durch den Aufbau eines ISMS nach ISO 27001 IT-Mittelstandstag Hochschule Esslingen 29. November 2017 DRIVING THE MOBILITY OF TOMORROW Kurzvorstellung Studium
Strukturierte Verbesserung der IT-Sicherheit durch den Aufbau eines ISMS nach ISO 27001 IT-Mittelstandstag Hochschule Esslingen 29. November 2017 DRIVING THE MOBILITY OF TOMORROW Kurzvorstellung Studium
Automatisiert. Vernetzt. Elektrisch. Elektrifizierung und Digitalisierung in der Mobilitätsindustrie in Baden-Württemberg.
 Automatisiert. Vernetzt. Elektrisch. Elektrifizierung und Digitalisierung in der Mobilitätsindustrie in Baden-Württemberg. nadla/istockphoto eine Herausforderung OLD WAY NEW WAY "Es ist nicht die stärkste
Automatisiert. Vernetzt. Elektrisch. Elektrifizierung und Digitalisierung in der Mobilitätsindustrie in Baden-Württemberg. nadla/istockphoto eine Herausforderung OLD WAY NEW WAY "Es ist nicht die stärkste
Haftung beim automatisierten Fahren. JUNE 28, 2018 Benedikt Xylander +49 (0)
") Haftung beim automatisierten Fahren JUNE 28, 2018 Benedikt Xylander Benedikt.Xylander@gtlaw.com +49 (0)30 700 171 226 Gliederung I. Automatisierungsstufen II. III. IV. Rechtsrahmen Haftung von Fahrzeughalter
Haftung beim automatisierten Fahren JUNE 28, 2018 Benedikt Xylander Benedikt.Xylander@gtlaw.com +49 (0)30 700 171 226 Gliederung I. Automatisierungsstufen II. III. IV. Rechtsrahmen Haftung von Fahrzeughalter
Hochautomatisierte Tunnelüberwachung für Katastrophenmanagement und Regelbetrieb (AUTUKAR)
") Hochautomatisierte Tunnelüberwachung für Katastrophenmanagement und Regelbetrieb () Prof. Dr.-Ing.,, Berlin Projektübersicht Seite 2 Forschungsprojekt vom BMBF gefördert 12/2015 bis 11/2018 (3 Jahre) Projektpartner
Hochautomatisierte Tunnelüberwachung für Katastrophenmanagement und Regelbetrieb () Prof. Dr.-Ing.,, Berlin Projektübersicht Seite 2 Forschungsprojekt vom BMBF gefördert 12/2015 bis 11/2018 (3 Jahre) Projektpartner
AUF DEM WEG ZUM STÄNDIG VERNETZTEN FAHRZEUGESK , ADAMS Abschlusspräsentation Josef Jiru, Fraunhofer ESK
 AUF DEM WEG ZUM STÄNDIG VERNETZTEN FAHRZEUGESK 3.2.2014, ADAMS Abschlusspräsentation Josef Jiru, Fraunhofer ESK Agenda Überblick Fraunhofer ESK Konnektivität im Fahrzeug ADAMS: Hybride Anbindung über Roadside
AUF DEM WEG ZUM STÄNDIG VERNETZTEN FAHRZEUGESK 3.2.2014, ADAMS Abschlusspräsentation Josef Jiru, Fraunhofer ESK Agenda Überblick Fraunhofer ESK Konnektivität im Fahrzeug ADAMS: Hybride Anbindung über Roadside
Road to Private Cloud mit OpenStack - Projekterfahrungen
 Road to Private Cloud mit OpenStack - Projekterfahrungen Andreas Kress ORACLE Deutschland B.V. & Co. KG Geschäftsstelle Frankfurt Co-Speaker: Detlef Drewanz ORACLE Deutschland B.V. & Co. KG Geschäftsstelle
Road to Private Cloud mit OpenStack - Projekterfahrungen Andreas Kress ORACLE Deutschland B.V. & Co. KG Geschäftsstelle Frankfurt Co-Speaker: Detlef Drewanz ORACLE Deutschland B.V. & Co. KG Geschäftsstelle