Koordinator: Indurad GmbH Teilprojektleitung: Prof. Ingrid Scholl, Institut MASKOR Förderkennzeichen: 033R126(A-H)
|
|
|
- Lioba Peters
- vor 5 Jahren
- Abrufe
Transkript
1 FKZ: 033R126(A-H) UPNS4D+: Untertägiges 4D+ Positionierungs-, Navigations- und Mapping-System zur hochselektiven, effizienten und im höchsten Maße sicheren Gewinnung wirtschaftsstrategischer Rohstoffe Koordinator: Indurad GmbH Teilprojektleitung: Prof. Ingrid Scholl, Institut MASKOR Förderkennzeichen: 033R126(A-H) Verbundpartner Xgraphic Ingenieurgesellschaft mbh GHH Fahrzeuge GmbH MILAN Geoservice GmbH TU Bergakademie Freiberg (TU BAF) Institut für Markscheidewesen und Geodäsie TU Delft, the Netherlands Section Resource Engineering Indurad GmbH Fritz Rensmann GmbH & Co KG Hermann Paus GmbH RWTH Aachen University Institut für Maschinentechnik der Rohstoffindustrie (IMR) FH Aachen Institut für Mobile Autonome Systeme und Kognitive Robotik (MASKOR) 1
2 FKZ: 033R126(A-H) Ausgangssituation und Zielsetzung Hochselektive, effiziente und sichere Gewinnung von mineralischen Rohstoffen insbesondere Seltener Erden aus heimischen Lagerstätten Messung von dynamischen Veränderungsprozessen und Erhöhung der Planungssicherheit Entwicklung eines mobilen autonomen und intelligenten Robotersystem zur Erkundung neuer Lagerstätten Entwicklung eines bergbautauglichen Multi-Sensor- Demonstrationssystems 2




3 FKZ: 033R126(A-H) Ausgangssituation und Zielsetzung Erkundungssystem Demonstrationssystem 3
4 FKZ: 033R126(A-H) Erste Ergebnisse (Auswahl) I. Integration und Demonstration Basisfahrzeug II. 6D-Kartographie und Visualisierung III. Navigation und Lokalisation IV. Markscheiderische Initialisierung V. Haufwerksanalyse VI. Leitstand-Software 4




5 FKZ: 033R126G I. Integration und Demonstration Entwicklung des Basisfahrzeugs Konzept: Basis: Schienensystem zur individuellen Applikation der Komponenten schwingungsentkoppelte Plattform Steuerung, Ladeeinheit, Beleuchtung, Spannungswandlung Antrieb, Energieversorgung Prototyp 5 Montage Basisfahrwerk mit Antrieb und Federung Erste Fahrversuche



6 FKZ: 033R126C II. 6D-Kartographie Plattform MQOne Sensorik SWAP zur Aufnahme dichter Punktewolken Erstes autonomes Fahren Rotating Platform for Swift Acquisition of Dense 3D Point Clouds 6




7 III. Lokalisation und Navigation Vermessung und Tracking von Posen 7

8 FKZ: 033R126B IV. Markscheiderische Initialisierung Terrestrisches Scanning unter Tage in Freiberg: Standpunkte Scanner bisher 105, Abstand der Scannerstandpunkte von 3m bis 10m je nach Beschaffenheit und Höhe/Breite der Strecke, ca Messpunkte pro Standpunkt, insgesamt ca. 900 m Strecke gescannt 8




9 FKZ: 033R126B IV. Markscheiderische Initialisierung 9


10 FKZ: 033R126F V. Haufwerksanalyse Erkennung großer Partikel im bergmännischen Haufwerk: a. Erkennung aus Ergebnissen der Haufwerksanalyse: Korndurchmesser/-radius Fläche / Volumen Lage der Partikel: Schwerpunkt/Zentrum der angepassten Ellipse/Ellipsoid b. Direkte Ableitung großer Partikel aus der Punktwolke Region Growing auf Basis abgeschätzter Krümmungen Große Partikel besitzen i.d.r. größere Flächen/ Regionen mit ähnlichen Krümmungswerten 10


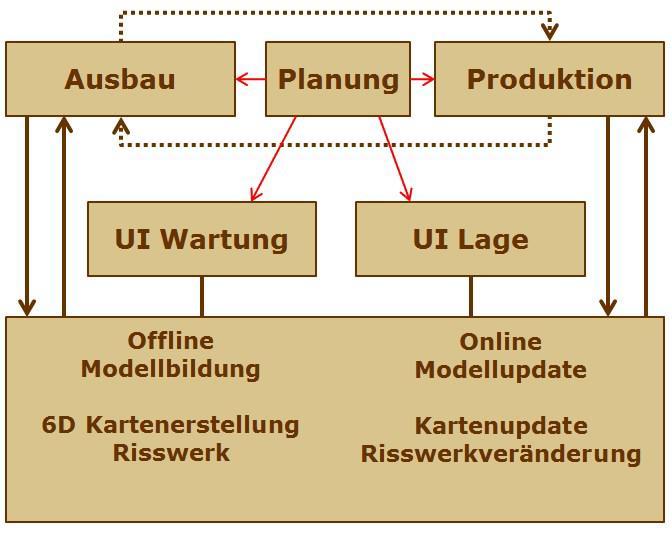
11 FKZ: 033R126E VI. Leitstand-Software Prototyp GUI/Visualisierung: 3D-Modell des Bergwerks Status-Anzeigen Ansichten für Ladefahrzeuge Schnittstellen-Implementierung VR-Test Import von Kollisionsdaten (Produktionsfahrzeug) 11
12 FKZ: 033R126(A-H) Aktuelle Projektentwicklungen Schnittstellen zwischen den Teilsystemen Prototypen Sensorträger und Sensorplattform zusammenführen, Roboter evaluieren Neues Zwischenziel Fahrassistenzsystem: Spurhaltesystem, Bremsassistent Erweiterter Kollisionsschutz Dynamische Prozesse im Bergwerk kartieren Übertragung der Ergebnisse aus Forschungsbergwerk Reiche Zeche /Freiberg in aktives Bergwerk 12








13 FKZ: 033R126(A-H) Konsortium 13


14 FKZ: 033R126(A-H) Das Konsortium dankt dem BMBF zur r4-förderung UPNS4D+ 14
Koordinator: Indurad GmbH Teilprojektleitung: Prof. Ingrid Scholl, Institut MASKOR Förderkennzeichen: 033R126(A-H)
") FKZ: 033R126(A-H) UPNS4D+: Untertägiges 4D+ Positionierungs-, Navigations- und Mapping-System zur hochselektiven, effizienten und im höchsten Maße sicheren Gewinnung wirtschaftsstrategischer Rohstoffe
FKZ: 033R126(A-H) UPNS4D+: Untertägiges 4D+ Positionierungs-, Navigations- und Mapping-System zur hochselektiven, effizienten und im höchsten Maße sicheren Gewinnung wirtschaftsstrategischer Rohstoffe
UPNS4D+: Selektive Gewinnung geringhaltiger Lagerstätten durch Untertagerobotik
 UPNS4D+: Selektive Gewinnung geringhaltiger Lagerstätten durch Untertagerobotik Dr. Matthias Rabel, indurad GmbH Koordinator: Dr. Reik Winkel, indurad GmbH Förderkennzeichen: 033R126A Verbundpartner XGraphic
UPNS4D+: Selektive Gewinnung geringhaltiger Lagerstätten durch Untertagerobotik Dr. Matthias Rabel, indurad GmbH Koordinator: Dr. Reik Winkel, indurad GmbH Förderkennzeichen: 033R126A Verbundpartner XGraphic
UPNS4D+ Neue Ansätze für die Kluftflächen- und Haufwerksanalyse. Ralf Donner, Andreas Geier, André John
 UPNS4D+ Neue Ansätze für die Kluftflächen- und Haufwerksanalyse Ralf Donner, Andreas Geier, André John TU Bergakademie Freiberg, Institut für Markscheidewesen und Geodäsie ZUSAMMENFASSUNG: Der Zugang zu
UPNS4D+ Neue Ansätze für die Kluftflächen- und Haufwerksanalyse Ralf Donner, Andreas Geier, André John TU Bergakademie Freiberg, Institut für Markscheidewesen und Geodäsie ZUSAMMENFASSUNG: Der Zugang zu
i-mass integriertes Maschinen Sensor System
 i-mass integriertes Maschinen Sensor System IMR Institut für Maschinen in der Rohstoffindustrie Dr.-Ing. Ralph Baltes Dortmund, Gliederung Vorstellung des IMR Motivation Projektvorstellung Anwendungsbeispiele
i-mass integriertes Maschinen Sensor System IMR Institut für Maschinen in der Rohstoffindustrie Dr.-Ing. Ralph Baltes Dortmund, Gliederung Vorstellung des IMR Motivation Projektvorstellung Anwendungsbeispiele
Punktwolken Was kommt danach? Anwendungen im markscheiderischen Lagerstättenmonitoring
 1 Punktwolken Was kommt danach? Anwendungen im markscheiderischen Lagerstättenmonitoring Andreas GEIER und André JOHN Zusammenfassung Im Bergbau gehört das Markscheidewesen zu den klassischen Ingenieurdisziplinen.
1 Punktwolken Was kommt danach? Anwendungen im markscheiderischen Lagerstättenmonitoring Andreas GEIER und André JOHN Zusammenfassung Im Bergbau gehört das Markscheidewesen zu den klassischen Ingenieurdisziplinen.
LiDAR Mobile Mapping
 Institut für Kartographie und Geoinformatik Leibniz Universität Hannover LiDAR Mobile Mapping Visualisierung, Vermessung, Fahrerassistenz Claus.Brenner@ikg.uni-hannover.de IKG Erfassungsfahrzeug Riegl
Institut für Kartographie und Geoinformatik Leibniz Universität Hannover LiDAR Mobile Mapping Visualisierung, Vermessung, Fahrerassistenz Claus.Brenner@ikg.uni-hannover.de IKG Erfassungsfahrzeug Riegl
AFK Aufbereitung feinkörniger polymetallischer heimischer Komplexerze
 AFK Aufbereitung feinkörniger polymetallischer heimischer Komplexerze Koordinator: Prof. Dr. K. Gerald van den Boogaart Förderkennzeichen: 033R128 Verbundpartner Beak Consultants GmbH UVF FIA GmbH TU Bergakademie
AFK Aufbereitung feinkörniger polymetallischer heimischer Komplexerze Koordinator: Prof. Dr. K. Gerald van den Boogaart Förderkennzeichen: 033R128 Verbundpartner Beak Consultants GmbH UVF FIA GmbH TU Bergakademie
STEUERUNGSINTEGRIERTE VISION LÖSUNGEN
 STEUERUNGSINTEGRIERTE VISION LÖSUNGEN Bernecker + Rainer Industrie-Elektronik Ges.m.b.H Sebastian Sachse Open Automation Technologies Sebastian.sachse@br-automation.com B&R Strasse 1 5142 Eggelsberg Austria
STEUERUNGSINTEGRIERTE VISION LÖSUNGEN Bernecker + Rainer Industrie-Elektronik Ges.m.b.H Sebastian Sachse Open Automation Technologies Sebastian.sachse@br-automation.com B&R Strasse 1 5142 Eggelsberg Austria
Ag-Recycling von Elektrolyseelektroden - AgREE
 Ag-Recycling von Elektrolyseelektroden - AgREE Vortragend: Dr. Konstantinos Douzinas Covestro Deutschland AG Koordinator: Andreas Bulan Covestro Deutschland AG Förderkennzeichen: 033R144 Covestro Deutschland
Ag-Recycling von Elektrolyseelektroden - AgREE Vortragend: Dr. Konstantinos Douzinas Covestro Deutschland AG Koordinator: Andreas Bulan Covestro Deutschland AG Förderkennzeichen: 033R144 Covestro Deutschland
Autonome Roboter und Internet der Dinge in untertägigen Anlagen
 ARIDuA Autonome Roboter und Internet der Dinge in untertägigen Anlagen M.Sc. Sebastian Varga, Institut für Markscheidewesen und Geodäsie - TU Freiberg, Dipl.-Ing. Steve Grehl Seit dem 1. Juli 2017 fördert
ARIDuA Autonome Roboter und Internet der Dinge in untertägigen Anlagen M.Sc. Sebastian Varga, Institut für Markscheidewesen und Geodäsie - TU Freiberg, Dipl.-Ing. Steve Grehl Seit dem 1. Juli 2017 fördert
Roberta Workshops. Robotik in Forschung und Lehre. Roberta Workshops. 3 Schwerpunkte Robotik in Schulen
 Roberta Workshops Robotik in Forschung und Lehre Prof. Dr. Martina Lehser Fakultät für Ingenieurwissenschaften Fachrichtung Informatik 18.06.2009 ZeMA Roberta RegioZentrum Saarland Hochschule für Technik
Roberta Workshops Robotik in Forschung und Lehre Prof. Dr. Martina Lehser Fakultät für Ingenieurwissenschaften Fachrichtung Informatik 18.06.2009 ZeMA Roberta RegioZentrum Saarland Hochschule für Technik
EEAS Chancen für neue Kooperationen. Berlin, 15. März 2016
 EEAS Chancen für neue Kooperationen Berlin, 15. März 2016 Agenda Zielsetzung Idee Partnerstruktur Teilprojekte Vision Umsetzung 2 15.03.2016 Zielsetzung Vernetzung von Akteuren Luft- und Raumfahrt Triebwerke,
EEAS Chancen für neue Kooperationen Berlin, 15. März 2016 Agenda Zielsetzung Idee Partnerstruktur Teilprojekte Vision Umsetzung 2 15.03.2016 Zielsetzung Vernetzung von Akteuren Luft- und Raumfahrt Triebwerke,
Abgesetzte Sensor-Plattform für polizeiliche Überwachungsaufgaben
 15. Februar 2007 DGLR Workshop Führungsaspekte unbemannter Luftfahrzeuge (TG6.2, TG6.3) Dipl. Phys. Gerhard Wenger Zielsetzung Beschreibung von einschlägigen Einsatzszenarien und ihre Anforderungen an
15. Februar 2007 DGLR Workshop Führungsaspekte unbemannter Luftfahrzeuge (TG6.2, TG6.3) Dipl. Phys. Gerhard Wenger Zielsetzung Beschreibung von einschlägigen Einsatzszenarien und ihre Anforderungen an
Motorik. Thomas Röfer
 Motorik Thomas Röfer Robotertypen Roboter mit Rädern Gelenkt, differentiell, synchron, omnidirektional Laufmaschinen Statisch und dynamisch stabil Ein-, zwei-, vier- und sechsbeinig Kognitive Robotik I
Motorik Thomas Röfer Robotertypen Roboter mit Rädern Gelenkt, differentiell, synchron, omnidirektional Laufmaschinen Statisch und dynamisch stabil Ein-, zwei-, vier- und sechsbeinig Kognitive Robotik I
Modulare Mobilitätsverbesserungs Technologie
 Modulare Mobilitätsverbesserungs Technologie Georg Edelmayer, Peter Mayer, Wolfgang Zagler fortec Forschungsgruppe für Rehabilitationstechnik Institut integriert studieren Technische Universität Wien Favoritenstraße
Modulare Mobilitätsverbesserungs Technologie Georg Edelmayer, Peter Mayer, Wolfgang Zagler fortec Forschungsgruppe für Rehabilitationstechnik Institut integriert studieren Technische Universität Wien Favoritenstraße
Legen Sie Wert auf Zeitersparnis, Qualitätsverbesserung und Flexibilität? Dann sind wir Ihr Partner!
 Legen Sie Wert auf Zeitersparnis, Qualitätsverbesserung und Flexibilität? Dann sind wir Ihr Partner! DESIGN BUILD OPTIMIZE WIR ENTWICKELN TECHNOLOGIE FÜR DIE ZUKUNFT. Wir sind Partner für Forschung und
Legen Sie Wert auf Zeitersparnis, Qualitätsverbesserung und Flexibilität? Dann sind wir Ihr Partner! DESIGN BUILD OPTIMIZE WIR ENTWICKELN TECHNOLOGIE FÜR DIE ZUKUNFT. Wir sind Partner für Forschung und
AICON 3D Arena Optische Trackingtechnologie für große Messvolumina. Kurt Sinnreich
 AICON 3D Arena Optische Trackingtechnologie für große Messvolumina Kurt Sinnreich Vorsprung ist messbar Eine effiziente und hochgenaue Produktionsüberwachung, Qualitätssicherung und -kontrolle sowie zuverlässiges
AICON 3D Arena Optische Trackingtechnologie für große Messvolumina Kurt Sinnreich Vorsprung ist messbar Eine effiziente und hochgenaue Produktionsüberwachung, Qualitätssicherung und -kontrolle sowie zuverlässiges
School of Engineering Institut für Mechatronische Systeme (IMS)
") School of Engineering Institut für Mechatronische Systeme (IMS) Zürcher Fachhochschule www.ims.zhaw.ch Forschung & Entwicklung Institut für Mechatronische Systeme (IMS) Mechatronik bringt die Disziplinen
School of Engineering Institut für Mechatronische Systeme (IMS) Zürcher Fachhochschule www.ims.zhaw.ch Forschung & Entwicklung Institut für Mechatronische Systeme (IMS) Mechatronik bringt die Disziplinen
Teach-In für die 3D-Scan Akquise mit einem Roboter. Teach-In für die 3D-Scanakquise mit einem mobilen Roboter
 Teach-In für die 3D-Scan Akquise mit einem Roboter DoritStruckmeier, Borrmann Dorit Oldenburger 2017 Oliver Borrmann,3D-Tage Andreas Nüchter 1 Zielsetzung der Arbeit Ein mobiler Roboter fährt einen angelernten
Teach-In für die 3D-Scan Akquise mit einem Roboter DoritStruckmeier, Borrmann Dorit Oldenburger 2017 Oliver Borrmann,3D-Tage Andreas Nüchter 1 Zielsetzung der Arbeit Ein mobiler Roboter fährt einen angelernten
Bachelorarbeit: Programmable Matter
 Bachelorarbeit: Programmable Matter ProgrammableMatter bzw. programmierbare Strukturen können nach ihrem Aufbau ihre Gestalt noch beliebig verändern. Der entwickelte modulare Roboter ARDS ist, durch seine
Bachelorarbeit: Programmable Matter ProgrammableMatter bzw. programmierbare Strukturen können nach ihrem Aufbau ihre Gestalt noch beliebig verändern. Der entwickelte modulare Roboter ARDS ist, durch seine
SCAN&GO DIE NEUE VERMESSUNGSTECHNOLOGIE. www.scan-go.eu www.shop.laserscanning-europe.com V.02.2014
 SCAN&GO DIE NEUE VERMESSUNGSTECHNOLOGIE V.02.2014 www.scan-go.eu www.shop.laserscanning-europe.com SCAN&GO SYSTEM (PATENTRECHTLICH GESCHÜTZT) DIE NEUE VERMESSUNGSTECHNOLOGIE Scan&Go ist eine neue Methode
SCAN&GO DIE NEUE VERMESSUNGSTECHNOLOGIE V.02.2014 www.scan-go.eu www.shop.laserscanning-europe.com SCAN&GO SYSTEM (PATENTRECHTLICH GESCHÜTZT) DIE NEUE VERMESSUNGSTECHNOLOGIE Scan&Go ist eine neue Methode
Quadrocopters and it s Applications: Overview of State of the Art Techniques
 : Overview of State of the Art Techniques Visual Tracking for Robotic Applications Sebastian Brunner Lehrstuhl für Echtzeitsysteme und Robotik Technische Universität München Email: brunnese@in.tum.de Date:
: Overview of State of the Art Techniques Visual Tracking for Robotic Applications Sebastian Brunner Lehrstuhl für Echtzeitsysteme und Robotik Technische Universität München Email: brunnese@in.tum.de Date:
Lehrangebot IuK-Projekt ab Sommersemester 2018
 Lehrangebot IuK-Projekt ab Sommersemester 2018 Bachelorstudiengang Informations- und Kommunikationstechnik Prof. Jörg Thiem http://www.fh-dortmund.de/thiem mailto:joerg.thiem@fh-dortmund.de Organisatorisches
Lehrangebot IuK-Projekt ab Sommersemester 2018 Bachelorstudiengang Informations- und Kommunikationstechnik Prof. Jörg Thiem http://www.fh-dortmund.de/thiem mailto:joerg.thiem@fh-dortmund.de Organisatorisches
Digitale Transformation am Beispiel vernetztes Auto Technische Möglichkeiten
 Digitale Transformation am Beispiel vernetztes Auto Technische Möglichkeiten Volker Gruhn Digitale Transformation Disruption Map: Sprengkraft der digitalen Transformation Quelle: Deloitte Digital/Heads!
Digitale Transformation am Beispiel vernetztes Auto Technische Möglichkeiten Volker Gruhn Digitale Transformation Disruption Map: Sprengkraft der digitalen Transformation Quelle: Deloitte Digital/Heads!
Ein Structure and Motion Ansatz zur Umfeldrekonstruktion in komplexen Fahrzeugumgebungen
 Sicherheit durch Fahrerassistenz 2010 Ein Structure and Motion Ansatz zur Umfeldrekonstruktion in komplexen Fahrzeugumgebungen Wojciech Derendarz, Thorsten Graf Volkswagen AG Friedrich M. Wahl TU Braunschweig,
Sicherheit durch Fahrerassistenz 2010 Ein Structure and Motion Ansatz zur Umfeldrekonstruktion in komplexen Fahrzeugumgebungen Wojciech Derendarz, Thorsten Graf Volkswagen AG Friedrich M. Wahl TU Braunschweig,
Das E-Auto und intelligente Mobilitätskonzepte für übermorgen
 Das E-Auto und intelligente Mobilitätskonzepte für übermorgen Sicht der Forschung aus dem Bereich Künstliche Intelligenz und Robotik 31.10.2013, Baunatal Jens Mey DFKI Bremen & Universität Bremen Robotics
Das E-Auto und intelligente Mobilitätskonzepte für übermorgen Sicht der Forschung aus dem Bereich Künstliche Intelligenz und Robotik 31.10.2013, Baunatal Jens Mey DFKI Bremen & Universität Bremen Robotics
Interaktive Mitarbeiterassistenz für die Elektromotorenmontage (HANNING ELEKTRO-WERKE GmbH & Co. KG) 06. Dezember 2017 Paderborn.
 06. Dezember 2017 Paderborn.") Interaktive Mitarbeiterassistenz für die Elektromotorenmontage (HANNING ELEKTRO-WERKE GmbH & Co. KG) 06. Dezember 2017 Paderborn www.its-owl.de Agenda Abschlusspräsentation Einführung Zielsetzung Resümee
Interaktive Mitarbeiterassistenz für die Elektromotorenmontage (HANNING ELEKTRO-WERKE GmbH & Co. KG) 06. Dezember 2017 Paderborn www.its-owl.de Agenda Abschlusspräsentation Einführung Zielsetzung Resümee
3D-Stadt- u. Landschaftsmodelle (für das WWW) am Bsp. Projekt 3D Stadtmodell Heidelberg
 am Bsp. Projekt 3D Stadtmodell Heidelberg") 3D-Stadt- u. Landschaftsmodelle (für das WWW) am Bsp. Projekt 3D Stadtmodell Heidelberg Weiterentwicklung von Internet-tauglichen 3D-Stadt-u. Landschaftsmodellen und Software für deren Verwaltung, Erzeugung
3D-Stadt- u. Landschaftsmodelle (für das WWW) am Bsp. Projekt 3D Stadtmodell Heidelberg Weiterentwicklung von Internet-tauglichen 3D-Stadt-u. Landschaftsmodellen und Software für deren Verwaltung, Erzeugung
GiS Gesellschaft für integrierte Systemplanung mbh IT Lösungen für Betrieb und Instandhaltung
 GiS Gesellschaft für integrierte Systemplanung mbh IT Lösungen für Betrieb und Instandhaltung GiS Gesellschaft für integrierte Systemplanung mbh Was wir bieten Über 30 Jahre Erfahrung in der Beratung,
GiS Gesellschaft für integrierte Systemplanung mbh IT Lösungen für Betrieb und Instandhaltung GiS Gesellschaft für integrierte Systemplanung mbh Was wir bieten Über 30 Jahre Erfahrung in der Beratung,
Kartenerstellung und Navigation
 Kartenerstellung und Navigation zur Positionserkennung autonomer Fahrzeuge von Ilona Blanck 27. Mai 2008 im Rahmen der Anwendungen I Vorlesung des Masterstudiums Informatik der Fakultät Technik und Informatik
Kartenerstellung und Navigation zur Positionserkennung autonomer Fahrzeuge von Ilona Blanck 27. Mai 2008 im Rahmen der Anwendungen I Vorlesung des Masterstudiums Informatik der Fakultät Technik und Informatik
Virtual Reality - Eine neue Herausforderung für die Geomatik
 Thomas P. Kersten, Felix Tschirschwitz, Simon Deggim & Maren Lindstaedt Virtual Reality - Eine neue Herausforderung für die Geomatik 9. er Forum für Geomatik,, 23.05.2018 Inhalt der Präsentation Einführung
Thomas P. Kersten, Felix Tschirschwitz, Simon Deggim & Maren Lindstaedt Virtual Reality - Eine neue Herausforderung für die Geomatik 9. er Forum für Geomatik,, 23.05.2018 Inhalt der Präsentation Einführung
Sensorsysteme für die Mensch-Technik-Interaktion. Jürgen Berger VDI/VDE Innovation + Technik GmbH SENSORSYSTEME 2012 Lichtenwalde
 Sensorsysteme für die Mensch-Technik-Interaktion Jürgen Berger VDI/VDE Gmb SENSORSYSTEME 2012 Lichtenwalde 18.10.2012 BMBF Zukunftsfeld Mensch-Technik-Kooperation Quelle: Fraunhofer Foresight-Prozess Im
Sensorsysteme für die Mensch-Technik-Interaktion Jürgen Berger VDI/VDE Gmb SENSORSYSTEME 2012 Lichtenwalde 18.10.2012 BMBF Zukunftsfeld Mensch-Technik-Kooperation Quelle: Fraunhofer Foresight-Prozess Im
Session: 9C Transferprojekt: itsowl-tt-revils Ressourceneffiziente Vernetzung von interaktiven Lichtsystemen
 Session: 9C Transferprojekt: itsowl-tt-revils Ressourceneffiziente Vernetzung von interaktiven Lichtsystemen Halemeier GmbH 11. Oktober 2017 Lemgo www.its-owl.de Agenda Abschlusspräsentation Einführung
Session: 9C Transferprojekt: itsowl-tt-revils Ressourceneffiziente Vernetzung von interaktiven Lichtsystemen Halemeier GmbH 11. Oktober 2017 Lemgo www.its-owl.de Agenda Abschlusspräsentation Einführung
Automatisiertes & autonomes Fahren bei der Deutschen Bahn Zukunftsvisionen und erste Umsetzungsschritte
 Automatisiertes & autonomes Fahren bei der Deutschen Bahn Zukunftsvisionen und erste Umsetzungsschritte 2 1 IT auf dem Zug heute Portfolio des Solution Centers Vehicle IT & Operating Center auf dem Fahrzeug
Automatisiertes & autonomes Fahren bei der Deutschen Bahn Zukunftsvisionen und erste Umsetzungsschritte 2 1 IT auf dem Zug heute Portfolio des Solution Centers Vehicle IT & Operating Center auf dem Fahrzeug
Agenda. RiskViz RiskViz Das Konsortium Weiterführende Informationen. Internetweite Suche Demonstration Rechtliche Fragestellungen.
 Agenda Das Konsortium Weiterführende Informationen Internetweite Suche Demonstration Rechtliche Fragestellungen Innere Suche Laboraufbau, um Scanverträglichkeit zu evaluieren Cyberversicherung als Beitrag
Agenda Das Konsortium Weiterführende Informationen Internetweite Suche Demonstration Rechtliche Fragestellungen Innere Suche Laboraufbau, um Scanverträglichkeit zu evaluieren Cyberversicherung als Beitrag
Mobile Serviceroboter in Reha & Co.
 Dipl.-Ing. Rüdiger Scheidig Mobile Serviceroboter in Reha & Co. Agenda 1 Unternehmen 2 Technologie 3 Anwendungen 2 Präsentation für FORUM DIGITALE GESUNDHEIT 30.8.2016 MetraLabs GmbH Neue Technologien
Dipl.-Ing. Rüdiger Scheidig Mobile Serviceroboter in Reha & Co. Agenda 1 Unternehmen 2 Technologie 3 Anwendungen 2 Präsentation für FORUM DIGITALE GESUNDHEIT 30.8.2016 MetraLabs GmbH Neue Technologien
Hauptseminar Roboternavigation. Kartenaufbau nach Thrun
 Hauptseminar Roboternavigation Kartenaufbau nach Thrun Hannes Keil keil@in.tum.de 18. Januar 2002 Überblick Kartenaufbau nach Thrun Überblick 1. Einführung in den Kartenbau 2. Einführung in den Aufbau
Hauptseminar Roboternavigation Kartenaufbau nach Thrun Hannes Keil keil@in.tum.de 18. Januar 2002 Überblick Kartenaufbau nach Thrun Überblick 1. Einführung in den Kartenbau 2. Einführung in den Aufbau
Session 2: Projektvorstellung. 18. August 2015, Gütersloh.
 Session 2: Projektvorstellung Transferprojekt itsowl-tt-sewrap 18. August 2015, Gütersloh www.its-owl.de Agenda Abschlusspräsentation itsowl-tt-sewrap Zielsetzung Ergebnisse Resümee und Ausblick it s OWL
Session 2: Projektvorstellung Transferprojekt itsowl-tt-sewrap 18. August 2015, Gütersloh www.its-owl.de Agenda Abschlusspräsentation itsowl-tt-sewrap Zielsetzung Ergebnisse Resümee und Ausblick it s OWL
Synergien aus Testautomatisierung und Lasttest. Vortrag im Rahmen des German Testing Day 2018
 Synergien aus Testautomatisierung und Lasttest Vortrag im Rahmen des German Testing Day 2018 Referent: Dirk O. Schweier Erfahrungen Qualitätsmanagement Testmanagement Testautomatisierung Trainer für ISTQB
Synergien aus Testautomatisierung und Lasttest Vortrag im Rahmen des German Testing Day 2018 Referent: Dirk O. Schweier Erfahrungen Qualitätsmanagement Testmanagement Testautomatisierung Trainer für ISTQB
Automatisierte Stoÿkantenkartierung auf der Basis von Daten eines terrestrischen Laserscanners
 Automatisierte Stoÿkantenkartierung auf der Basis von Daten eines terrestrischen Laserscanners Forschungsprojekt Auftraggeber: K+S AG, Kassel Projektpartner: Institut für Markscheidewesen und Geodäsie,
Automatisierte Stoÿkantenkartierung auf der Basis von Daten eines terrestrischen Laserscanners Forschungsprojekt Auftraggeber: K+S AG, Kassel Projektpartner: Institut für Markscheidewesen und Geodäsie,
Scalypso - 3D-Laserscandaten effektiv auswerten
 Scalypso - 3D-Laserscandaten effektiv auswerten IB Dr. König Kopernikusstraße 2 14482 Potsdam Denkmal Tiefbau Präzision Anlagenbau 2-5 mm Entfernung 0.1 mm long distance Tachymetrie 10 max. 40 m midrange
Scalypso - 3D-Laserscandaten effektiv auswerten IB Dr. König Kopernikusstraße 2 14482 Potsdam Denkmal Tiefbau Präzision Anlagenbau 2-5 mm Entfernung 0.1 mm long distance Tachymetrie 10 max. 40 m midrange
Plancal und Trimble CAD/CAE Software- und Positionierlösungen für die Gebäudetechnik. Velden, Juni 2012
 Plancal und Trimble CAD/CAE Software- und Positionierlösungen für die Gebäudetechnik Velden, Juni 2012 Inhalt Unternehmensübersicht Plancal und Trimble Herausforderungen in der Gebäudetechnik Positionierlösungen
Plancal und Trimble CAD/CAE Software- und Positionierlösungen für die Gebäudetechnik Velden, Juni 2012 Inhalt Unternehmensübersicht Plancal und Trimble Herausforderungen in der Gebäudetechnik Positionierlösungen
IDENTIFIKATION DYNAMISCHER ROBOTERPARAMETER
 IDENTIFIKATION DYNAMISCHER ROBOTERPARAMETER Arbeit für 1-2 Personen Modellierung und Ableitung der Identifikationsgleichung für serielle Robotersysteme Elimination linearer Abhängigkeiten Berechnung optimaler
IDENTIFIKATION DYNAMISCHER ROBOTERPARAMETER Arbeit für 1-2 Personen Modellierung und Ableitung der Identifikationsgleichung für serielle Robotersysteme Elimination linearer Abhängigkeiten Berechnung optimaler
Improving the Accuracy of GPS
 Improving the Accuracy of GPS Stephan Kopf, Thomas King, Wolfgang Effelsberg Lehrstuhl für Praktische Informatik IV Universität Mannheim Gliederung Motivation ierungsfehler von GPS Steigerung der Genauigkeit
Improving the Accuracy of GPS Stephan Kopf, Thomas King, Wolfgang Effelsberg Lehrstuhl für Praktische Informatik IV Universität Mannheim Gliederung Motivation ierungsfehler von GPS Steigerung der Genauigkeit
HafenCity Universität Hamburg 2009 Anwender Forum 16 Juni 2009
 1 Dienstag, 7. Juli 2009 Referenzen 3D Laser Scanning im Anlagenbau Gegründet: 1994 Standorte Berlin Köthen 30 Mitarbeiter Engineering - Anlagenbau Laser Scanning Rohrleitungstechnik Stahlbau Industrieanlagen
1 Dienstag, 7. Juli 2009 Referenzen 3D Laser Scanning im Anlagenbau Gegründet: 1994 Standorte Berlin Köthen 30 Mitarbeiter Engineering - Anlagenbau Laser Scanning Rohrleitungstechnik Stahlbau Industrieanlagen
Session: 8 itsowl-tt-scyro Schweißen von Mischwellen mittels hybridkinematischer Roboter 06. Juli 2016 Bielefeld.
 Session: 8 itsowl-tt-scyro Schweißen von Mischwellen mittels hybridkinematischer Roboter 06. Juli 2016 Bielefeld www.its-owl.de Agenda Abschlusspräsentation Einführung Zielsetzung Ergebnisse Resümee und
Session: 8 itsowl-tt-scyro Schweißen von Mischwellen mittels hybridkinematischer Roboter 06. Juli 2016 Bielefeld www.its-owl.de Agenda Abschlusspräsentation Einführung Zielsetzung Ergebnisse Resümee und
Inhaltsverzeichnis. Georg Stark. Robotik mit MATLAB ISBN: Weitere Informationen oder Bestellungen unter
 Inhaltsverzeichnis Georg Stark Robotik mit MATLAB ISBN: 978-3-446-41962-9 Weitere Informationen oder Bestellungen unter http://www.hanser.de/978-3-446-41962-9 sowie im Buchhandel. Carl Hanser Verlag, München
Inhaltsverzeichnis Georg Stark Robotik mit MATLAB ISBN: 978-3-446-41962-9 Weitere Informationen oder Bestellungen unter http://www.hanser.de/978-3-446-41962-9 sowie im Buchhandel. Carl Hanser Verlag, München
10 Inhaltsverzeichnis
 Georg Stark Robotik mit MATLAB Mit 101 Bildern, 33 Tabellen, 40 Beispielen, 55 Aufgaben und 37 Listings Fachbuchverlag Leipzig im Carl Hanser Verlag Inhaltsverzeichnis 1 Einführung in die Robotik 13 1.1
Georg Stark Robotik mit MATLAB Mit 101 Bildern, 33 Tabellen, 40 Beispielen, 55 Aufgaben und 37 Listings Fachbuchverlag Leipzig im Carl Hanser Verlag Inhaltsverzeichnis 1 Einführung in die Robotik 13 1.1
Modellbasierte Validierung von mobilen Arbeitsmaschinen im virtuellen Fahrversuch
 Taking you to the next level Modellbasierte Validierung von mobilen Arbeitsmaschinen im virtuellen Fahrversuch Dr.-Ing. Christian Schyr, IPG Automotive GmbH, Karlsruhe Dipl.-Ing. Frank Otto, Karlsruher
Taking you to the next level Modellbasierte Validierung von mobilen Arbeitsmaschinen im virtuellen Fahrversuch Dr.-Ing. Christian Schyr, IPG Automotive GmbH, Karlsruhe Dipl.-Ing. Frank Otto, Karlsruher
Engineering und Betrieb Smarter Komponenten in IoT-Netzwerken für die Automatisierung der Produktion
 Institut für Automatisierungstechnik und Softwaresysteme Engineering und Betrieb Smarter Komponenten in IoT-Netzwerken für die Automatisierung der Produktion Prof. Dr.-Ing. Michael Weyrich IOT-Kongress
Institut für Automatisierungstechnik und Softwaresysteme Engineering und Betrieb Smarter Komponenten in IoT-Netzwerken für die Automatisierung der Produktion Prof. Dr.-Ing. Michael Weyrich IOT-Kongress
Koordinator: Dr. Carsten Gellermann Fraunhofer ISC Projektgruppe IWKS Förderkennzeichen: FKZ 033R141G
 Koordinator: Dr. Carsten Gellermann Fraunhofer ISC Projektgruppe IWKS Förderkennzeichen: FKZ 033R141G Verbundpartner Dr. Simon Striepe - Barberini GmbH Dr. Friedhelm Schöne - Duesmann & Hensel Recycling
Koordinator: Dr. Carsten Gellermann Fraunhofer ISC Projektgruppe IWKS Förderkennzeichen: FKZ 033R141G Verbundpartner Dr. Simon Striepe - Barberini GmbH Dr. Friedhelm Schöne - Duesmann & Hensel Recycling
Praktischer Nutzen und Potenziale von Punktwolken für kommunale Anwendungen. Rico Richter 8. Oktober 2016 Workshop 3D-Stadtmodelle
 Praktischer Nutzen und Potenziale von Punktwolken für kommunale Anwendungen Rico Richter 8. Oktober 2016 Workshop 3D-Stadtmodelle Hintergrund Hasso-Plattner-Institut (HPI): Fachgebiet Computergrafische
Praktischer Nutzen und Potenziale von Punktwolken für kommunale Anwendungen Rico Richter 8. Oktober 2016 Workshop 3D-Stadtmodelle Hintergrund Hasso-Plattner-Institut (HPI): Fachgebiet Computergrafische
AgREE Ag-Recycling von Elektrolyseelektroden
 AgREE Ag-Recycling von Elektrolyseelektroden Koordinator: Andreas Bulan Referent: Dr. Konstantinos Douzinas Förderkennzeichen: 033R144 Verbundpartner Covestro Deutschland AG, Leverkusen Siegfried Jacob
AgREE Ag-Recycling von Elektrolyseelektroden Koordinator: Andreas Bulan Referent: Dr. Konstantinos Douzinas Förderkennzeichen: 033R144 Verbundpartner Covestro Deutschland AG, Leverkusen Siegfried Jacob
Vorstellung einer Projektumgebung zur Überwachung komplexer Bauprojekte
 Vorstellung einer Projektumgebung zur Überwachung komplexer Bauprojekte Gründe, Varianten, Möglichkeiten, Potenziale SKM Technologietag 2014 Hasenwinkel 25.09.2014 Torsten Geritz S.K.M. Informatik GmbH
Vorstellung einer Projektumgebung zur Überwachung komplexer Bauprojekte Gründe, Varianten, Möglichkeiten, Potenziale SKM Technologietag 2014 Hasenwinkel 25.09.2014 Torsten Geritz S.K.M. Informatik GmbH
GeoCAD-OP. GeoCAD-Mine Baggerseite RMR. Softwareentwicklungsgesellschaft. Kurzbeschreibung
 RMR Softwareentwicklungsgesellschaft GeoCAD-Mine Baggerseite GeoCAD-Mine / Bagger Übersicht Im Rahmen der Zusammenarbeit mit der RWE Power AG wurde von der RMR eine Software entwickelt, die den gesamten
RMR Softwareentwicklungsgesellschaft GeoCAD-Mine Baggerseite GeoCAD-Mine / Bagger Übersicht Im Rahmen der Zusammenarbeit mit der RWE Power AG wurde von der RMR eine Software entwickelt, die den gesamten
Legen Sie Wert auf Zeitersparnis, Qualitätsverbesserung und Flexibilität? Dann sind wir Ihr Partner!
 Legen Sie Wert auf Zeitersparnis, Qualitätsverbesserung und Flexibilität? Dann sind wir Ihr Partner! RESEARCH WIR ENTWICKELN TECHNOLOGIE FÜR DIE ZUKUNFT. Wir sind Partner für Forschung und Entwicklung.
Legen Sie Wert auf Zeitersparnis, Qualitätsverbesserung und Flexibilität? Dann sind wir Ihr Partner! RESEARCH WIR ENTWICKELN TECHNOLOGIE FÜR DIE ZUKUNFT. Wir sind Partner für Forschung und Entwicklung.
3D-Scan bei der DB Systemtechnik
 5. Fachseminar Optische Prüf- und Messverfahren Vortrag 6 3D-Scan bei der DB Systemtechnik Marko SCHRÖTER DB Systemtechnik GmbH Waisenstrasse 21 03046 Cottbus Kontakt E-Mail: marko.schroeter@deutschebahn.com
5. Fachseminar Optische Prüf- und Messverfahren Vortrag 6 3D-Scan bei der DB Systemtechnik Marko SCHRÖTER DB Systemtechnik GmbH Waisenstrasse 21 03046 Cottbus Kontakt E-Mail: marko.schroeter@deutschebahn.com
FAMOS Galileo for Future AutoMOtive Systems
 FAMOS Galileo for Future AutoMOtive Systems Dr. Lutz Junge Wolfsburg, 08.09.2009 Der Straßenverkehr wächst! Situation und Entwicklung in Deutschland und Europa Hauptprobleme: Unfalltote 2007 EU-27 42.485
FAMOS Galileo for Future AutoMOtive Systems Dr. Lutz Junge Wolfsburg, 08.09.2009 Der Straßenverkehr wächst! Situation und Entwicklung in Deutschland und Europa Hauptprobleme: Unfalltote 2007 EU-27 42.485
Die Sicht eines internationalen Ausrüsters
 SMART GRIDS-KONGRESS 2018, FELLBACH, 3. DEZEMBER 2018 Digitalisierung der elektrischen Energieversorgung Die Sicht eines internationalen Ausrüsters Prof. Dr. Jochen Kreusel, Market Innovation Manager Power
SMART GRIDS-KONGRESS 2018, FELLBACH, 3. DEZEMBER 2018 Digitalisierung der elektrischen Energieversorgung Die Sicht eines internationalen Ausrüsters Prof. Dr. Jochen Kreusel, Market Innovation Manager Power
Messplatzautomatisierung. 7.Semester PHT - WS 2005/2006 Einteilung der Projektteams
 Messplatzautomatisierung 7.Semester PHT - WS 2005/2006 Einteilung der Projektteams Überblick Systeme mit Regelkreis Kugel auf Rollbahn Balancierender Stab 1D Autonomes System Bobby Car Physikalische Systeme
Messplatzautomatisierung 7.Semester PHT - WS 2005/2006 Einteilung der Projektteams Überblick Systeme mit Regelkreis Kugel auf Rollbahn Balancierender Stab 1D Autonomes System Bobby Car Physikalische Systeme
GIS-basierte topologische Fahrzeuglokalisierung durch LIDAR Kreuzungserkennung
 durch LIDAR Kreuzungserkennung André Müller, Hans-Joachim Wünsche Fakultät für Luft- und Raumfahrttechnik Institut für Technik Autonomer Systeme (TAS) Universität der Bundeswehr München Inhalt - Einleitung
durch LIDAR Kreuzungserkennung André Müller, Hans-Joachim Wünsche Fakultät für Luft- und Raumfahrttechnik Institut für Technik Autonomer Systeme (TAS) Universität der Bundeswehr München Inhalt - Einleitung
Handgeführtes BIM-Aufmaßsystem- Untersuchung des Potentials eines mobilen low-cost Gerätes zur Erzeugung von 3D-Modellen
 - Untersuchung des Potentials eines mobilen low-cost Gerätes zur Erzeugung von 3D-Modellen Rebecca Achenbach Forum Bauinformatik 2017 07.09.2017 Zielsetzung & Vorgehensweise Bewertung des Google Tango
- Untersuchung des Potentials eines mobilen low-cost Gerätes zur Erzeugung von 3D-Modellen Rebecca Achenbach Forum Bauinformatik 2017 07.09.2017 Zielsetzung & Vorgehensweise Bewertung des Google Tango
IdentPro Intralogistiklösungen für. Rostock, 01. Juni 2016
 IdentPro Intralogistiklösungen für Rostock, 01. Juni 2016 IdentPro Intralogistiklösungen für Seehafen Wismar I N D U S T R I E 4.0 Teilnehmer Herr Groß Herr Peters Herr Rudat Herr Kremp Wismar, 16. Novemberr
IdentPro Intralogistiklösungen für Rostock, 01. Juni 2016 IdentPro Intralogistiklösungen für Seehafen Wismar I N D U S T R I E 4.0 Teilnehmer Herr Groß Herr Peters Herr Rudat Herr Kremp Wismar, 16. Novemberr
 I. II. I. II. III. IV. I. II. III. I. II. III. IV. I. II. III. IV. V. I. II. III. IV. V. VI. I. II. I. II. III. I. II. I. II. I. II. I. II. III. I. II. III. IV. V. VI. VII. VIII.
I. II. I. II. III. IV. I. II. III. I. II. III. IV. I. II. III. IV. V. I. II. III. IV. V. VI. I. II. I. II. III. I. II. I. II. I. II. I. II. III. I. II. III. IV. V. VI. VII. VIII.
IoT für KMU umgesetzt
 IoT für KMU umgesetzt Raphaël Müller Teamleiter Logistiklösungen Tools. Next Level. 2005 2013 2016 THE MES IS DEAD, LONG LIVE THE MES 4.0! «MES, as we know it, is dead. Whose fault is it? You probably
IoT für KMU umgesetzt Raphaël Müller Teamleiter Logistiklösungen Tools. Next Level. 2005 2013 2016 THE MES IS DEAD, LONG LIVE THE MES 4.0! «MES, as we know it, is dead. Whose fault is it? You probably
DMT Pilot 3D Mobile Mapping mit dem DMT Pilot 3D unter Tage M.Sc. Daniel Schröder
 Mobile Mapping mit dem unter Tage M.Sc. Daniel Schröder Idee 3-in-1 System zur präzisen Positions- und Lagebestimmung, Navigation und 3D-Dokumentation Technologie des DLR für die autonome Navigation eines
Mobile Mapping mit dem unter Tage M.Sc. Daniel Schröder Idee 3-in-1 System zur präzisen Positions- und Lagebestimmung, Navigation und 3D-Dokumentation Technologie des DLR für die autonome Navigation eines
Rolland. Niels Schütte Hristo Gurdzhanov. 1 Vorstellung 2 Gliederung 3 Forschung 4 Rolland 1 5 Rolland 2. 6 Obstacle Map 7 Rolland 3 8 Projekte
 Rolland Niels Schütte Gliederung Forschung Rolland 1 Rolland 2 ObstacleMap Rolland 3 Projekte Probleme Finanzierung Forschung Navigation/Raumkognition Sichere Systeme Rolland 1 Kamera Jede Menge Sensoren
Rolland Niels Schütte Gliederung Forschung Rolland 1 Rolland 2 ObstacleMap Rolland 3 Projekte Probleme Finanzierung Forschung Navigation/Raumkognition Sichere Systeme Rolland 1 Kamera Jede Menge Sensoren
Anwendung der Roblet -Tec hnol ogie
 Anwendung der Roblet -Tec hnol ogie genrob.com Hagen Stanek stanek@genrob.com Universität Hamburg Daniel Westhoff westhoff@informatik.uni-hamburg.de Inhalt 1. Einführung 2. Roblet -Technologie: Roblets
Anwendung der Roblet -Tec hnol ogie genrob.com Hagen Stanek stanek@genrob.com Universität Hamburg Daniel Westhoff westhoff@informatik.uni-hamburg.de Inhalt 1. Einführung 2. Roblet -Technologie: Roblets
Ein Ansatz zum modellgetriebenen Integrationstest von EJB-basierten Informationssystemen
 1 / 30 Ein Ansatz zum modellgetriebenen Integrationstest von EJB-basierten Informationssystemen Zwischenvortrag zur Diplomarbeit Steffen Conrad (235183) Research Group Software Construction RWTH Aachen
1 / 30 Ein Ansatz zum modellgetriebenen Integrationstest von EJB-basierten Informationssystemen Zwischenvortrag zur Diplomarbeit Steffen Conrad (235183) Research Group Software Construction RWTH Aachen
Das ehighway-projekt ELISA Schwerlastverkehr per Oberleitung
 Kongress: Elektromobilität im gewerblichen Umfeld Elektromobilität im Schwerlastverkehr Das ehighway-projekt ELISA Schwerlastverkehr per Oberleitung Gerd Riegelhuth Langen, 7. Dezember 2017 1 Themenschwerpunkte
Kongress: Elektromobilität im gewerblichen Umfeld Elektromobilität im Schwerlastverkehr Das ehighway-projekt ELISA Schwerlastverkehr per Oberleitung Gerd Riegelhuth Langen, 7. Dezember 2017 1 Themenschwerpunkte
Mobile Robotik KMR QUANTEC
 Mobile Robotik KMR QUANTEC DE KMR QUANTEC Eine neue Dimension der Robotik mit bewährter KUKA Qualität Er arbeitet hochpräzise mit aktuellsten KR QUANTEC Konsolrobotern und der bewährten KUKA Steuerung
Mobile Robotik KMR QUANTEC DE KMR QUANTEC Eine neue Dimension der Robotik mit bewährter KUKA Qualität Er arbeitet hochpräzise mit aktuellsten KR QUANTEC Konsolrobotern und der bewährten KUKA Steuerung
KRANKENHAUS DER ZUKUNFT: GANZHEITLICHE TRANSFORMATION IM KLINIKSEKTOR
 KRANKENHAUS DER ZUKUNFT: GANZHEITLICHE TRANSFORMATION IM KLINIKSEKTOR Fraunhofer-Institut für Software- und Systemtechnik ISST Anja Burmann Schladming 09.10.2018 Quelle: everythingpossible - Fotolia Fraunhofer
KRANKENHAUS DER ZUKUNFT: GANZHEITLICHE TRANSFORMATION IM KLINIKSEKTOR Fraunhofer-Institut für Software- und Systemtechnik ISST Anja Burmann Schladming 09.10.2018 Quelle: everythingpossible - Fotolia Fraunhofer
Industrie 4.0. Der Weg zur Smart Factory - von der Analyse bis zur Umsetzung SEITE 1
 Industrie 4.0 Der Weg zur Smart Factory - von der Analyse bis zur Umsetzung SEITE 1 Agenda Produzierendes Gewerbe im Wandel CANCOM Industrial Solutions Production IT Services Projekte / Use Cases (Lackieranlage,
Industrie 4.0 Der Weg zur Smart Factory - von der Analyse bis zur Umsetzung SEITE 1 Agenda Produzierendes Gewerbe im Wandel CANCOM Industrial Solutions Production IT Services Projekte / Use Cases (Lackieranlage,
Heinrich-von-Brentano-Schule: Intelligente Beleuchtung macht Schule. Siteco. Main-Taunus-Kreis
 Heinrich-von-Brentano-Schule: Intelligente Beleuchtung macht Schule Siteco Main-Taunus-Kreis Heinrich-von-Brentano-Schule: Intelligente Beleuchtung macht Schule BESCHREIBUNG Ausgangssituation - 50 Stück
Heinrich-von-Brentano-Schule: Intelligente Beleuchtung macht Schule Siteco Main-Taunus-Kreis Heinrich-von-Brentano-Schule: Intelligente Beleuchtung macht Schule BESCHREIBUNG Ausgangssituation - 50 Stück
Capturing Reality Hoch aufgelöste statische und dynamische Kartierung für hochautomatisiertes Fahren.
 Capturing Reality Hoch aufgelöste statische und dynamische Kartierung für hochautomatisiertes Fahren www.joanneum.at/digital Wozu braucht mein Auto eine Karte? 2 Mensch als Fahrer: Karte wird zum Navigieren
Capturing Reality Hoch aufgelöste statische und dynamische Kartierung für hochautomatisiertes Fahren www.joanneum.at/digital Wozu braucht mein Auto eine Karte? 2 Mensch als Fahrer: Karte wird zum Navigieren
POTENZIALE VON ECHTZEIT-ANALYSEN FÜR DIE PRODUKTION UND LOGISTIK VON MORGEN Hanau
 POTENZIALE VON ECHTZEIT-ANALYSEN FÜR DIE PRODUKTION UND LOGISTIK VON MORGEN 28.02.18 Hanau 69% DER UNTERNEHMEN VERSTEHEN UNTER INDUSTRIE 4.0 DIE DIGITALISIERUNG VON GESCHÄFTSPROZESSEN 85 % DER ASSETS SIND
POTENZIALE VON ECHTZEIT-ANALYSEN FÜR DIE PRODUKTION UND LOGISTIK VON MORGEN 28.02.18 Hanau 69% DER UNTERNEHMEN VERSTEHEN UNTER INDUSTRIE 4.0 DIE DIGITALISIERUNG VON GESCHÄFTSPROZESSEN 85 % DER ASSETS SIND
Session: 7B it s owl TT VidA Jobotec 10/11. Oktober 2017 Lemgo.
 Session: 7B it s owl TT VidA Jobotec 10/11. Oktober 2017 Lemgo www.its-owl.de Agenda Einführung Zielsetzung Resümee und Ausblick it s OWL Clustermanagement GmbH 17.10.2017 2 Einführung Jobotec GmbH JOBOTEC
Session: 7B it s owl TT VidA Jobotec 10/11. Oktober 2017 Lemgo www.its-owl.de Agenda Einführung Zielsetzung Resümee und Ausblick it s OWL Clustermanagement GmbH 17.10.2017 2 Einführung Jobotec GmbH JOBOTEC
UAV Mapping Drohnenvermessung im Infrastrukturbau
 UAV Mapping Drohnenvermessung im Infrastrukturbau SWISSBAU FOCUS / 19.01.2018 Vortrag Inhalt þ Vorstellung Schällibaum AG þ Erfassung und Bereitstellung þ þ Drei Referenzbeispiele þ Erhaltungsprojekt Schöllenen
UAV Mapping Drohnenvermessung im Infrastrukturbau SWISSBAU FOCUS / 19.01.2018 Vortrag Inhalt þ Vorstellung Schällibaum AG þ Erfassung und Bereitstellung þ þ Drei Referenzbeispiele þ Erhaltungsprojekt Schöllenen
Mobile Mapping. Eine Gegenüberstellung unterschiedlicher Verfahren zur Erfassung von Straßendaten. Christian Wever TopScan GmbH wever@topscan.
 Mobile Mapping Eine Gegenüberstellung unterschiedlicher Verfahren zur Erfassung von Straßendaten Christian Wever TopScan GmbH wever@topscan.de TopScan Gesellschaft zur Erfassung topographischer Information
Mobile Mapping Eine Gegenüberstellung unterschiedlicher Verfahren zur Erfassung von Straßendaten Christian Wever TopScan GmbH wever@topscan.de TopScan Gesellschaft zur Erfassung topographischer Information
HSW Systemhaus Sicherheitstechnik
 HSW Systemhaus Sicherheitstechnik ein Produkt von Hanseatische Schutz- und Wachdienst GmbH DroneTracker 2.0 Sicherheit für Ihr Unternehmen und Ihren Luftraum Sichern Sie Ihren Luftraum! Wieso Dedrone?
HSW Systemhaus Sicherheitstechnik ein Produkt von Hanseatische Schutz- und Wachdienst GmbH DroneTracker 2.0 Sicherheit für Ihr Unternehmen und Ihren Luftraum Sichern Sie Ihren Luftraum! Wieso Dedrone?
Analyse der logischen Systemarchitektur und Spezifikation der technischen Systemarchitektur. Kernprozess zur System- und Software- Entwicklung
 der Benutzeranforderungen & der logischen zur System- und Software- Entwicklung Anwendungsfälle Akzeptanztest & Systemtest der logischen & der technischen Kalibrierung Integrationstest des Systems Integration
der Benutzeranforderungen & der logischen zur System- und Software- Entwicklung Anwendungsfälle Akzeptanztest & Systemtest der logischen & der technischen Kalibrierung Integrationstest des Systems Integration
Multisensorsystem für die automatisierte Detektion von Gangerzlagerstätten und seltenen Erden in einer Mine. Sebastian Varga
 Multisensorsystem für die automatisierte Detektion von Gangerzlagerstätten und seltenen Erden in einer Mine Sebastian Varga Technische Universität Bergakademie Freiberg, Institut für Markscheidewesen und
Multisensorsystem für die automatisierte Detektion von Gangerzlagerstätten und seltenen Erden in einer Mine Sebastian Varga Technische Universität Bergakademie Freiberg, Institut für Markscheidewesen und
landesweiter Gebäudemodelle und
 Ableitung landesweiter Gebäudemodelle und Vegetationslayer aus Laserscanning-Daten Fax: +43-(0)512-507 48 69 E-mail: office@laserdata.at www.laserdata.at Laserdata - Geschäftsbereiche Software für Laserscanning-Daten,
Ableitung landesweiter Gebäudemodelle und Vegetationslayer aus Laserscanning-Daten Fax: +43-(0)512-507 48 69 E-mail: office@laserdata.at www.laserdata.at Laserdata - Geschäftsbereiche Software für Laserscanning-Daten,
kepler robotik unser Weg
 kepler robotik unser Weg Burgenländischer IT-Tag 2017 Robotik für alle Bundesrealgymnasium Keplerstraße Graz kepler robotik unser Weg Matura Wettbewerbe Kurse 1. 5. Klasse 3D Druck Platinenherstellung
kepler robotik unser Weg Burgenländischer IT-Tag 2017 Robotik für alle Bundesrealgymnasium Keplerstraße Graz kepler robotik unser Weg Matura Wettbewerbe Kurse 1. 5. Klasse 3D Druck Platinenherstellung
Geodäsie. .aus dem Weltall zum Grundstückseigentum. Studium Bachelor und Master of Science Geodäsie und Geoinformation
 Geodäsie.aus dem Weltall zum Grundstückseigentum Studium Bachelor und Master of Science Geodäsie und Geoinformation 10. September 2013 TU Darmstadt Institut für Geodäsie 1 Geodäsie im FB 13: Institut für
Geodäsie.aus dem Weltall zum Grundstückseigentum Studium Bachelor und Master of Science Geodäsie und Geoinformation 10. September 2013 TU Darmstadt Institut für Geodäsie 1 Geodäsie im FB 13: Institut für
Beginnen Sie Ihr erstes Projekt von IoT und AR mit Transition Technologies PSC
 Beginnen Sie Ihr erstes Projekt von IoT und AR mit Transition Technologies PSC _Uber uns Transition Technologies PSC Wir sind ein Unternehmen, das zu Unternehmensverbindung Transition Technologies einer
Beginnen Sie Ihr erstes Projekt von IoT und AR mit Transition Technologies PSC _Uber uns Transition Technologies PSC Wir sind ein Unternehmen, das zu Unternehmensverbindung Transition Technologies einer
Neue Wartungs- und Instandhaltungskonzepte durch Condition Monitoring
 Neue Wartungs- und Instandhaltungskonzepte durch Condition Monitoring 05.04.2011 Roman Cecil ARGO-HYTOS Condition Monitoring / Page 1 Motivation für Condition Monitoring Ursachen für Ausfälle am Beispiel
Neue Wartungs- und Instandhaltungskonzepte durch Condition Monitoring 05.04.2011 Roman Cecil ARGO-HYTOS Condition Monitoring / Page 1 Motivation für Condition Monitoring Ursachen für Ausfälle am Beispiel
Session 10 Energieeffizienz intelligenter biomechatronischer Systeme (O.T.W.-Orthopädietechnik Winkler)
") Session 10 (O.T.W.-Orthopädietechnik Winkler) 06. Juli 2016 Bielefeld www.its-owl.de Agenda Abschlusspräsentation Einführung Zielsetzung Ergebnisse Resümee und Ausblick it s OWL Clustermanagement GmbH
Session 10 (O.T.W.-Orthopädietechnik Winkler) 06. Juli 2016 Bielefeld www.its-owl.de Agenda Abschlusspräsentation Einführung Zielsetzung Ergebnisse Resümee und Ausblick it s OWL Clustermanagement GmbH
Session: 8A Effiziente Softwareentwicklung für Stanznietsysteme (Böllhoff Automation GmbH) 10/11. Oktober 2017 Lemgo.
 10/11. Oktober 2017 Lemgo.") Session: 8A Effiziente Softwareentwicklung für Stanznietsysteme (Böllhoff Automation GmbH) 10/11. Oktober 2017 Lemgo www.its-owl.de Agenda Abschlusspräsentation Einführung Zielsetzung Ergebnisse Resümee
Session: 8A Effiziente Softwareentwicklung für Stanznietsysteme (Böllhoff Automation GmbH) 10/11. Oktober 2017 Lemgo www.its-owl.de Agenda Abschlusspräsentation Einführung Zielsetzung Ergebnisse Resümee
Hilscher Gesellschaft für Systemautomation mbh Intelligente Lösungen für die industrielle Kommunikation
 Holger Pfrommer Gruppenleiter netanalyzer Hilscher Gesellschaft für Systemautomation mbh Intelligente Lösungen für die industrielle Kommunikation www.hilscher.com netscope für LabVIEW Intelligente Prozessdatenerfassung
Holger Pfrommer Gruppenleiter netanalyzer Hilscher Gesellschaft für Systemautomation mbh Intelligente Lösungen für die industrielle Kommunikation www.hilscher.com netscope für LabVIEW Intelligente Prozessdatenerfassung
GeoCAD-OP. GeoCAD-Mine Absetzerseite RMR. Softwareentwicklungsgesellscha. Kurzbeschreibung
 RMR Softwareentwicklungsgesellscha GeoCAD-Mine Absetzerseite Vermessung von Oberflächen Analog zur Ausrüstung eines Baggers können auch die Köpfe von Absetzern ebenfalls mit einem GPS-Aufbau und einem
RMR Softwareentwicklungsgesellscha GeoCAD-Mine Absetzerseite Vermessung von Oberflächen Analog zur Ausrüstung eines Baggers können auch die Köpfe von Absetzern ebenfalls mit einem GPS-Aufbau und einem
Entwicklung der Messtechnik am Beispiel von hochpräziser RTK-Positionierung mittels Galileo
 Geodäsie 4.0 - was erwartet uns Geodäten? Entwicklung der Messtechnik am Beispiel von hochpräziser RTK-Positionierung mittels Galileo Xiaoguang Luo Leica Geosystems AG, Heerbrugg Seminar an der HFT Stuttgart,
Geodäsie 4.0 - was erwartet uns Geodäten? Entwicklung der Messtechnik am Beispiel von hochpräziser RTK-Positionierung mittels Galileo Xiaoguang Luo Leica Geosystems AG, Heerbrugg Seminar an der HFT Stuttgart,
EINLADUNG INWERTSETZUNG EINHEIMISCHER ROHSTOFFE DURCH EUROPÄISCHE VERBUNDFORSCHUNG
 EINLADUNG INWERTSETZUNG EINHEIMISCHER ROHSTOFFE DURCH EUROPÄISCHE VERBUNDFORSCHUNG Regionale Abschlußkonferenz Sachsen des EU-Projektes FAME (Flexible And Mobil Economic processing technologies) 17. Dezember
EINLADUNG INWERTSETZUNG EINHEIMISCHER ROHSTOFFE DURCH EUROPÄISCHE VERBUNDFORSCHUNG Regionale Abschlußkonferenz Sachsen des EU-Projektes FAME (Flexible And Mobil Economic processing technologies) 17. Dezember
TopScan GmbH. Mobile Laser Scanning
 TopScan GmbH Mobile Laser Scanning Ein neues Verfahren zur Bestandsaufnahme TopScan Gesellschaft zur Erfassung topographischer Information mbh Christian Wever Düsterbergstr. 5 48432 Rheine Rheine, 2003
TopScan GmbH Mobile Laser Scanning Ein neues Verfahren zur Bestandsaufnahme TopScan Gesellschaft zur Erfassung topographischer Information mbh Christian Wever Düsterbergstr. 5 48432 Rheine Rheine, 2003
Einsatz eines Online-Angebots zur Internationalisierung der Hochschullehre im Bereich Robotik
 Fakultät für Elektrotechnik, Informatik und Mathematik Institut für Elektrotechnik und Informationstechnik Einsatz eines Online-Angebots zur Internationalisierung der Hochschullehre im Bereich Robotik
Fakultät für Elektrotechnik, Informatik und Mathematik Institut für Elektrotechnik und Informationstechnik Einsatz eines Online-Angebots zur Internationalisierung der Hochschullehre im Bereich Robotik
Cloud Landwirtschaftssoftware & Mobile APPs. Zeiterfassung & Leistungserfassung Erntehelferverwaltung midcom GmbH - Cloud Landwirtschaftssoftware
 Cloud Landwirtschaftssoftware & Mobile APPs Zeiterfassung & Leistungserfassung Erntehelferverwaltung midcom GmbH - Cloud Landwirtschaftssoftware 22 Softwaremodule in der Cloud CRM, ERP, ASM, BDE, e-shop,
Cloud Landwirtschaftssoftware & Mobile APPs Zeiterfassung & Leistungserfassung Erntehelferverwaltung midcom GmbH - Cloud Landwirtschaftssoftware 22 Softwaremodule in der Cloud CRM, ERP, ASM, BDE, e-shop,
Modellierung verteilter Systeme Grundlagen der Programm und Systementwicklung
 Modellierung verteilter Systeme Grundlagen der Programm und Systementwicklung Sommersemester 2012 Prof. Dr. Dr. h.c. Manfred Broy Unter Mitarbeit von Dr. M. Spichkova, J. Mund, P. Neubeck Lehrstuhl Software
Modellierung verteilter Systeme Grundlagen der Programm und Systementwicklung Sommersemester 2012 Prof. Dr. Dr. h.c. Manfred Broy Unter Mitarbeit von Dr. M. Spichkova, J. Mund, P. Neubeck Lehrstuhl Software
Weltweit führend in Tunnelsprengtechnik und Gleisgeometrie. Stefan Basler, Leiter Vertrieb
 Weltweit führend in Tunnelsprengtechnik und Gleisgeometrie Stefan Basler, Leiter Vertrieb Was ist Gleisgeometrie Typische Parameter und Messinstrumente Spurweite Überhöhung Stationierung Verwindung Krümmung
Weltweit führend in Tunnelsprengtechnik und Gleisgeometrie Stefan Basler, Leiter Vertrieb Was ist Gleisgeometrie Typische Parameter und Messinstrumente Spurweite Überhöhung Stationierung Verwindung Krümmung