Künstliche Intelligenz
|
|
|
- Ruth Kuntz
- vor 8 Jahren
- Abrufe
Transkript

1 Künstliche Intelligenz Vorlesung 4: Suchverfahren Informierte Suche 1/132
2 INFORMIERTE SUCHSTRATEGIEN (ISS) Benutzt neben der Definition des Problems auch problemspezifisches Wissen. Findet Lösungen effizienter als eine uninformierte Strategie Der Suchraum ist eingeschränkt durch intelligente Auswahl der Knoten Dies funktioniert über einer Evaluierungsfunktion Diese Funktion ist immer problemspezifisch 2/132
3 INFORMIERTE SUCHSTRATEGIEN (ISS) Die Suche nennt man informiert, wenn (zusätzlich) eine Bewertung aller Knoten des Suchraumes angegeben werden kann. Knotenbewertung Schätzfunktion Ähnlichkeit zum Zielknoten oder auch Schätzung des Abstands zum Zielknoten Bewertung des Zielknotens: Sollte Maximum / Minimum der Schätzfunktion sein 3/132
4 HEURISTISCHE SUCHE Eine Heuristik (Daumenregel) ist eine Schätzfunktion, die in vielen praktischen Fällen, die richtige Richtung zum Ziel angibt. Suchproblem ist äquivalent zu: Minimierung (bzw. Maximierung) einer Knotenbewertung (einer Funktion) auf einem (implizit gegebenen) gerichteten Graphen Variante: Maximierung in einer Menge oder in einem n-dimensionaler Raum. 4/132
5 SUCHSTRATEGIEN IN BÄUMEN Evaluationsfunktionen f (n) - Kosten durch Knoten (Zustand) n h(n) - Kosten eines Lösungspfades von Knoten n zum Zielknoten g(n) - Kosten eines Lösungspfades vom initialen Knoten zum Knoten n f (n) = g(n) + h(n) 5/132

6 8-PUZZLE. BEISPIEL 6/132
7 8-PUZZLE. BEISPIEL 7/132
8 8-PUZZLE. BEISPIEL 8/132
9 8-PUZZLE. BEISPIEL 9/132

10 8-PUZZLE. BEISPIEL 10/132
11 8-PUZZLE. BEISPIEL 11/132
12 8-PUZZLE. BEISPIEL 12/132
13 8-PUZZLE. BEISPIEL 13/132
14 8-PUZZLE. BEISPIEL 14/132
15 8-PUZZLE. BEISPIEL 15/132
16 8-PUZZLE. BEISPIEL 16/132

17 8-PUZZLE. BEISPIEL 17/132
18 8-PUZZLE. BEISPIEL 18/132
19 SUCHSTRATEGIEN IN BÄUMEN Tree Search function TREE - SEARCH (problem) returns eine Lösung oder einen Fehler Die Grenzknoten mit dem Ausgangszustand von problem initialisieren loop do if die Grenze ist leer then return Fehler Wähle einen Blattknoten aus und entferne ihn aus den Grenzknoten if Knoten enthält einen Zielzustand then return die entsprechende Lösung Knoten expandieren und der Grenze die resultierenden Knoten hinzufügen 19/132
20 SUCHSTRATEGIEN IN BÄUMEN Graph-Search function GRAPH-SEARCH(problem) returns eine Lösung oder einen Fehler Die Grenzknoten mit dem Ausgangszustand von problem initialisieren Die untersuchte Menge als leer initialisieren loop do if die Grenze ist leer then return Fehler Wähle einen Blattknoten aus und entferne ihn aus den Grenzknoten if Knoten enthält einen Zielzustand then return die entsprechende Lösung Füge den Knoten zur untersuchten Menge hinzu Knoten expandieren und der Grenze die resultierenden Knoten hinzufügen Nur, wenn nicht in der Grenze der untersuchten Menge 20/132
21 ISS: BESTENSUCHE (BEST-FIRST) Ist eine Instanz des TREE-SEARCH oder GRAPH-SEARCH Algorithmus und wählt einen Knoten auf Basis einer Evaluierungsfunktion f (n) zur Expandierung aus. Evaluierungsfunktion: Kostenabschätzungsfunktion - der Knoten mit der geringsten Bewertung wird zuerst erweitert. Die Wahl von f bestimmt die Suchstrategie Beispiel: Suche mit einheitlichen Kosten f = Pfadkosten Strategien Expandiere den Knoten der dem Ziel am nächsten liegt Suche die billigste Lösung 21/132
")
22 ISS: BESTENSUCHE (BEST-FIRST) 22/132
23 ISS: BESTENSUCHE (BEST-FIRST) Komplexität: b Verzweigungsfaktor, d maximale Tiefe der Lösung Zeitkomplexität T(n) = 1 + b + b b d O(b d ) Speicherkomplexität: S(n) = T(n) Vollständigkeit: NEIN - unendliche Pfade, falls jeder einzelne Knoten als beste Lösung evaluiert wird Optimalität - abhängig von der Heuristik Vorteile: Spezifische Information macht die Suche schneller Gute Geschwindigkeit Nachteile: Evaluierung der Zustände erfordert Ressoursen (komputationelle, physische...) Anwendungen: Web crawler (automatic indexer), Spiele 23/132
24 ISS: BESTENSUCHE (BEST-FIRST) 24/132
25 BEISPIEL: BESTENSUCHE (BEST-FIRST) 25/132
26 BEISPIEL: BESTENSUCHE (BEST-FIRST) 26/132
27 BEISPIEL: BESTENSUCHE (BEST-FIRST) 27/132
28 BEISPIEL: BESTENSUCHE (BEST-FIRST) 28/132
29 BEISPIEL: BESTENSUCHE (BEST-FIRST) 29/132
30 BEISPIEL: BESTENSUCHE (BEST-FIRST) 30/132
31 8-PUZZLE. BEISPIEL 31/132
32 BEST-FIRST-SUCHE: EIGENSCHAFTEN entspricht einer gesteuerten Tiefensuche daher unvollständig Platzbedarf ist durch die Speicherung der besuchten Knoten exponentiell in der Tiefe. Durch Betrachtung aller Knoten auf dem Stack können lokale Maxima schneller verlassen werden, als beim Hill-Climbing 32/132
33 BFS - WEITERE BEISPIELE Missionäre und Kanibale: h(n) Anzahl der Personen auf dem initialen Ufer 8-Puzzle: h(n) Anzahl der Steine am falschen Platz ODER h(n) - Manhatten Entfernung (Entfernung zum Ziel) Problem des Handlungsreisenden: h(n) Entfernung zum nächsten Nachbar Auszahlen einer Summe mit minimaler Anzahl von Münzen: h(n) wähle einen Münzwert kleiner als die auszuzahlende Summe 33/132
34 GREEDY BEST-FIRST Versucht den Knoten zu expandieren, der dem Ziel am nächsten liegt Begründung: dies wird wahscheinlich schnell zu einer Lösung führen Evaluierungsfunktion f (n) = h(n), d.h. nur Heuristikfunktion Man wählt immer den billigesten Pfad 34/132
35 BEISPIEL A, D, E, H 35/132

36 GREEDY ISS 36/132
37 GREEDY ISS Komplexität Zeit Komplexität DFS b Verzweigungsfaktor, dmax maximale Tiefe der Suche T(n) = 1 + b + b b dmax T(n) = 1 + b + b b dmax O(b dmax ) Speicherkomplexität BFS: d - Tiefe der Lösung, dann S(n) = 1 + b + b b d O(b dmax ) Vollständigkeit: NEIN; Optimalität: möglich Vorteile: findert schnell eine Lösung (nicht immer optimal), insbesondere für kleine Datensätze Nachteile: Die Summe der optimalen lokalen Lösungen globale optimale Entscheidung. Ex. TSP Anwendungen: Planungsaufgaben partielle Summen: Münzen, Rucksack Puzzles Optimale Pfade in Graphen 37/132
38 BERGSTEIGERPROZEDUR (HILL-CLIMBING) Auch als Gradientenaufstieg bekannt Gradient: Richtung der Vergrößerung einer Funktion (Berechnung durch Differenzieren) Parameter der Bergsteigerprozedur Menge der initialen Knoten Nachfolgerfunktion (Nachbarschaftsrelation) Bewertungsfunktion der Knoten, wobei wir annehmen, dass Zielknoten maximale Werte haben (Minimierung erfolgt analog) Zieltest 38/132

39 BERGSTEIGEN 39/132
40 BEISPIEL: BERGSTEIGEN 40/132
41 BEISPIEL: BERGSTEIGEN 41/132
42 BEISPIEL: BERGSTEIGEN 42/132
43 BEISPIEL: BERGSTEIGEN 43/132
44 BEISPIEL: BERGSTEIGEN 44/132
45 BEISPIEL: BERGSTEIGEN 45/132
46 BEISPIEL: BERGSTEIGEN 46/132
47 BEISPIEL: BERGSTEIGEN 47/132
48 BEISPIEL: BERGSTEIGEN 48/132
49 BEISPIEL: BERGSTEIGEN 49/132
50 BEISPIEL: BERGSTEIGEN 50/132
51 BEISPIEL: BERGSTEIGEN 51/132
52 EIGENSCHAFTEN DER BERGSTEIGERPROZEDUR Entspricht einer gesteuerten Tiefensuche mit Sharing daher nicht-vollständig Platzbedarf ist durch die Speicherung der besuchten Knoten exponentiell in der Tiefe. Varianten Optimierung einer Funktion ohne Zieltest: Bergsteige ohne Stack, stets zum nächst höheren Knoten Wenn nur noch Abstiege möglich sind, stoppe und gebe aktuellen Knoten aus Findet lokales Maximum, aber nicht notwendigerweise globales 52/132
53 BEST-FIRST-SUCHE UND CLIMBING Ähnlich zum Hillclimbing, aber: Wählte stets als nächsten zu expandierenden Knoten, den mit dem besten Wert Änderung im Algorithmus: sortiere alle Knoten auf dem Stack 53/132
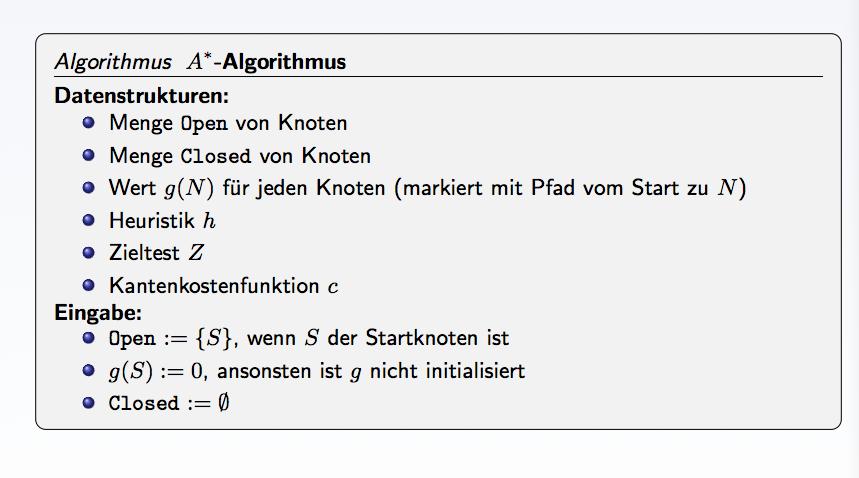
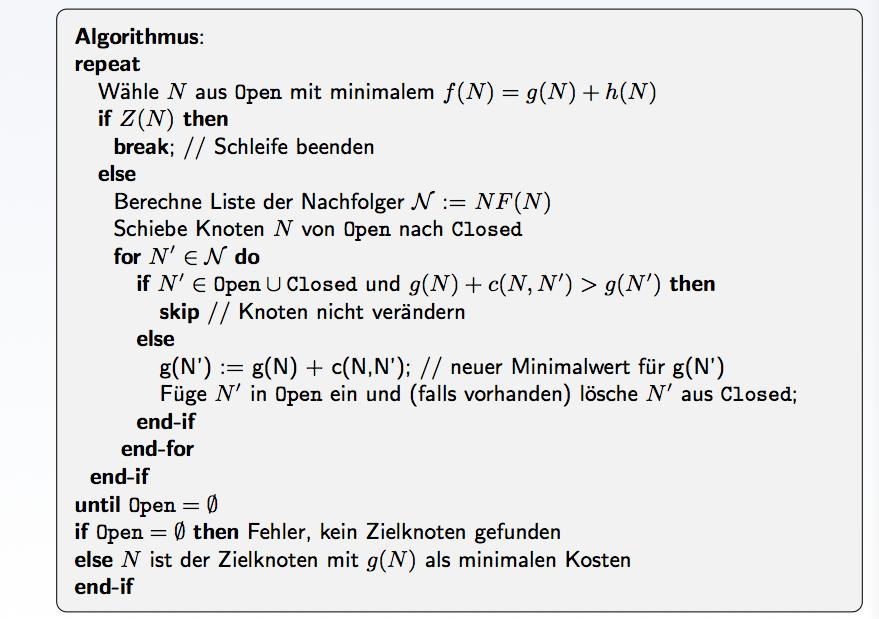
54 A -ALGORITHMUS Suchproblem Startknoten Zieltest Z Nachfolgerfunktion NF. Annahme: Es gibt nur eine Kante zwischen zwei Knoten. (Graph ist schlicht) Kantenkosten g(n1, N 2 ) R. Heuristik h schätzt Abstand zum Ziel Ziel: Finde kostenminimalen Weg vom Startknoten zu einem Zielknoten 54/132
55 BEISPIEL: ROUTENSUCHE 55/132
56 A -ALGORITHMUS Kombination positiver Fakten der Suche mit einheitlichen Kosten Optimalität und Vollständigkeit Sortierte Schlangen Greedy Suchverfahren Geschwindigkeit Sortierung anhand Evaluierung Evaluierungsfunktion f (n) Kostenabschätzung für den Pfad durch Knoten n: f (n) = g(n) + h(n) g(n) - Kostenfunktion vom initialen Zustand bis zum Zustand n h(n) - Heuristische Kostenfunktion vom Zustand n bis zum Zielzustand Minimisierung der gesamt Kosten für ein Pfad 56/132
57 BEISPIEL: DAS RUCKSACK-PROBLEM Volumen W, n Objekte (o 1, o 2,..., o n ), jedes Objekt bringt ein Gewinn p i, i = 1, 2,..., n. o 1 o 2 o 3 o 4 p i w i Lösung: für W = 5 o 1 und o 3 g(n) = p i für ausgewählte Objekte o i h(n) = p j für nicht ausgewählte Objekte und wj W w i Jeder einzelne Knoten ist ein Tupel (p, w, p, f ) mit: p - Gewinn der ausgewählten Objekte (Funktion g(n)) w - Gewicht der ausgewählten Objekte p - maximaler Gewinn der erreicht werden kann aus dem jetzigen Zustand unter Betrachtung des freien Platzes im Rucksack (Funktion h(n)) 57/132
58 A -ALGORITHMUS 58/132
59 A -ALGORITHMUS 59/132
60 A -ALGORITHMUS Komplexitätsanalyse: Zeitkomplexität: b Verzweigungsfaktor, d max maximale Tiefe, T(n) = 1 + b + b b dmax O(b dmax ) Speicherkomplexität: d Tiefe der Lösung, S(n) = 1 + b + b b d O(b d ) Vollständigkeit: Ja Optimalität: Ja Vorteile: Expandiert die kleinste Anzahl von Knotem im Baum Nachteile: Verbraucht viel Speicherplatz Anwendungen: Planungsprobleme, Probleme mit partielle Summen (Rucksack, Münzen), Puzzles, Optimale Pfade in Graphen 60/132
61 A -ALGORITHMUS Versionen iterative deepening A (IDA ) memory-bounded A (MA ) simplified memory bounded A (SMA ) recursive best-first search (RBFS) dynamic A (DA ) real time A hierarchical A 61/132
62 BEISPIEL 62/132
63 BEISPIEL 63/132
64 BEISPIEL 64/132
65 BEISPIEL 65/132
66 BEISPIEL 66/132
67 BEISPIEL 67/132
68 BEISPIEL 68/132
69 BEISPIEL 69/132
70 BEISPIEL 70/132
71 BEISPIEL 71/132
72 BEISPIEL 72/132
73 BEISPIEL 73/132
74 BEISPIEL 74/132
75 BEISPIEL 75/132
76 BEISPIEL 76/132
77 BEISPIEL 77/132
78 BEISPIEL 78/132
79 BEISPIEL 79/132
80 BEISPIEL 80/132
81 BEISPIEL 81/132
82 BEISPIEL 82/132
83 BEISPIEL 83/132
84 BEISPIEL 84/132
85 BEISPIEL 85/132
86 BEISPIEL 86/132
87 BEISPIEL 87/132

88 BEISPIEL 88/132
89 BEISPIEL 89/132

90 BEISPIEL 90/132
91 BEISPIEL 91/132
92 BEISPIEL 92/132
93 BEISPIEL 93/132
94 BEISPIEL 94/132
95 BEISPIEL 95/132
96 BEISPIEL 96/132
97 BEISPIEL 97/132
98 BEISPIEL 98/132
99 BEISPIEL 99/132
100 BEISPIEL 100/132
101 BEISPIEL 101/132
102 BEISPIEL 102/132
103 BEISPIEL 103/132
104 BEISPIEL 104/132
105 BEISPIEL 105/132
106 BEISPIEL 106/132
107 BEISPIEL 107/132
108 BEISPIEL 108/132
109 BEISPIEL 109/132
110 BEISPIEL 110/132
111 BEISPIEL 111/132
112 BEISPIEL 112/132
113 BEISPIEL 113/132
114 BEISPIEL 114/132
115 BEISPIEL 115/132
116 BEISPIEL 116/132
117 BEISPIEL 117/132
118 BEISPIEL 118/132
119 BEISPIEL 119/132
120 BEISPIEL 120/132
121 BEISPIEL Beispiel zeigt, dass i.a. notwendig: Knoten aus Closed wieder in Open einfügen Beispiel extra so gewählt! Beachte: Auch Kanten werden mehrfach betrachtet Mehr Anforderungen an die Heuristik verhindern das! 121/132
122 NOTATIONEN FÜR DIE ANALYSE g (N, N ) = Kosten des optimalen Weges von N nach N g (N) =Kosten des optimalen Weges vom Start bis zu N c (N) =Kosten des optimalen Weges von N bis zum nächsten Zielknoten Z. f (N) = g (N) + c (N) (Kosten des optimalen Weges durch N bis zu einem Ziel Z) 122/132
123 VORAUSSETZUNGEN FÜR DEN A -ALGORITHMUS 1 es gibt nur endlich viele Knoten N mit g (N) + h(n) d, wobei d = inf{kosten aller Wege von S zu einem Zielknoten Z}. 2 Für jeden Knoten N gilt: h(n) c (N), d.h. die Schätzfunktion ist unterschätzend. 3 Für jeden Knoten N ist die Anzahl der Nachfolger endlich. 4 Alle Kanten kosten etwas: c(n, N ) > 0 für alle N, N. 5 Der Graph ist schlicht, d.h. zwischen zwei Knoten gibt es höchstens eine Kante 123/132
124 BEDINGUNG 1 IST NOTWENDIG: BEISPIELE 124/132
125 BEDINGUNG 1 IST NOTWENDIG: BEISPIELE 125/132
126 BEDINGUNG 1: HINREICHENDE BEDINGUNGEN 126/132
127 KORREKTHEIT UND VOLLSTÄNDIGKEIT DER A -SUCHE Wenn Voraussetzungen für den A -Algorithmus erfüllt, dann existiert zum Infimum d stets ein endlicher Weg mit Kosten Notation: infweg(n) := inf{kosten aller Wege von Nzu einem Ziel} Satz Es existiere ein Weg vom Start S bis zu einem Zielknoten. Sei d = infweg(s). Die Voraussetzungen für den A -Algorithmus seien erfüllt. Dann existiert ein optimaler Weg von S zum Ziel mit Kosten d. 127/132
128 KORREKTHEIT UND VOLLSTÄNDIGKEIT DER A -SUCHE Ein optimaler Knoten ist stets in Open: Lemma Die Voraussetzungen zum A -Algorithmus seien erfüllt. Es existiere ein optimaler Weg S = K 0 K 1 K 2 K n = Z vom Startknoten S bis zu einem Zielknoten Z. Dann ist während der Ausführung des A -Algorithmus stets ein Knoten K i in Open, markiert mit g(k i ) = g (K i ), d.h. mit einem optimalen Weg von S zu K i. 128/132
129 KORREKTHEIT UND VOLLSTÄNDIGKEIT DER A -SUCHE Expandierte Zielknoten sind optimal: Lemma Wenn die Voraussetzung für den A -Algorithmus erfüllt sind, gilt: Wenn A einen Zielknoten expandiert, dann ist dieser optimal. Ein Zielknoten wird nach endlicher Zeit expandiert: Lemma Die Voraussetzungen zum A -Algorithmus seien erfüllt. Wenn ein Weg vom Start zum Zielknoten existiert gilt: Der A -Algorithmus expandiert einen Zielknoten nach endlich vielen Schritten. 129/132
130 KORREKTHEIT UND VOLLSTÄNDIGKEIT DER A -SUCHE Zusammenfassend ergibt sich: Theorem Es existiere ein Weg vom Start bis zu einem Zielknoten. Die Voraussetzungen zum A -Algorithmus seien erfüllt. Dann findet der A -Algorithmus einen optimalen Weg zu einem Zielknoten. 130/132
131 SPEZIALFÄLLE Wenn h(n) = 0 für alle Knoten N, dann ist A -Algorithmus dasselbe wie die sogenannte Gleiche-Kosten-Suche Wenn c(n 1, N 2 ) = k für alle Knoten N 1, N 2 und h(n) = 0 für alle Knoten N, dann ist A -Algorithmus gerade die Breitensuche. 131/132
132 VARIANTE: A o -ALGORITHMUS A o -Algorithmus findet alle optimalen Wege Abänderung am A -Algorithmus: sobald erster Zielknoten mit Wert d expandiert wurde: Füge in Open nur noch Knoten mit g(n) + h(n) d ein Andere Knoten kommen in Closed Stoppe erst, wenn Open leer ist Theorem Wenn die Voraussetzungen für den A -Algorithmus gelten, dann findet der Algorithmus A o alle optimalen Wege von S zum Ziel. 132/132
133 132/132
Künstliche Intelligenz
 Künstliche Intelligenz Vorlesung 3: Suchverfahren Informierte Suche 1/78 WIEDERHOLUNG Bislang uninformierte Strategien BFS, DFS, Iteratives Vertiefen, Bidirektionale Suche Wichtige Begriffe: Suchraum,
Künstliche Intelligenz Vorlesung 3: Suchverfahren Informierte Suche 1/78 WIEDERHOLUNG Bislang uninformierte Strategien BFS, DFS, Iteratives Vertiefen, Bidirektionale Suche Wichtige Begriffe: Suchraum,
Künstliche Intelligenz
 Künstliche Intelligenz Vorlesung 4: Suchverfahren Informierte Suche 1/135 WIEDERHOLUNG BISLANG... Uninformierte Strategien: bearbeiten den Suchraum systematisch, aber ohne problemspezifisches Wissen ab.
Künstliche Intelligenz Vorlesung 4: Suchverfahren Informierte Suche 1/135 WIEDERHOLUNG BISLANG... Uninformierte Strategien: bearbeiten den Suchraum systematisch, aber ohne problemspezifisches Wissen ab.
Wissensbasierte Systeme. Kombinatorische Explosion und die Notwendigkeit Heuristischer Suche. Heuristiken und ihre Eigenschaften
 1 Michael Beetz Technische Universität München Wintersemester 2004/05 Kombinatorische Explosion und die Notwendigkeit Heuristischer Suche 2 3 der Eigenschaften der 4 : 8-Puzzle 5 Heuristiken und ihre Eigenschaften
1 Michael Beetz Technische Universität München Wintersemester 2004/05 Kombinatorische Explosion und die Notwendigkeit Heuristischer Suche 2 3 der Eigenschaften der 4 : 8-Puzzle 5 Heuristiken und ihre Eigenschaften
Zustandsraumsuche: Blinde und Heuristische Suche. Blinde und Heuristische Suche
 Zustandsraumsuche: Blinde und Heuristische Suche Einführung in die KI Übungsstunde am 01.11.04 Benmin Altmeyer 1 Heute im Angebot Was ist Suche? Suche als Probemlösung Zustandsraumsuche Vollständigkeit
Zustandsraumsuche: Blinde und Heuristische Suche Einführung in die KI Übungsstunde am 01.11.04 Benmin Altmeyer 1 Heute im Angebot Was ist Suche? Suche als Probemlösung Zustandsraumsuche Vollständigkeit
Uninformierte Suche in Java Informierte Suchverfahren
 Uninformierte Suche in Java Informierte Suchverfahren Stephan Schwiebert WS 2009/2010 Sprachliche Informationsverarbeitung Institut für Linguistik Universität zu Köln Suchprobleme bestehen aus Zuständen
Uninformierte Suche in Java Informierte Suchverfahren Stephan Schwiebert WS 2009/2010 Sprachliche Informationsverarbeitung Institut für Linguistik Universität zu Köln Suchprobleme bestehen aus Zuständen
Einführung in Heuristische Suche
 Einführung in Heuristische Suche Beispiele 2 Überblick Intelligente Suche Rundenbasierte Spiele 3 Grundlagen Es muss ein Rätsel / Puzzle / Problem gelöst werden Wie kann ein Computer diese Aufgabe lösen?
Einführung in Heuristische Suche Beispiele 2 Überblick Intelligente Suche Rundenbasierte Spiele 3 Grundlagen Es muss ein Rätsel / Puzzle / Problem gelöst werden Wie kann ein Computer diese Aufgabe lösen?
Uninformierte Suche in Java Informierte Suchverfahren
 Uninformierte Suche in Java Informierte Suchverfahren Stephan Schwiebert WS 2008/2009 Sprachliche Informationsverarbeitung Institut für Linguistik Universität zu Köln 8-Damen-Problem Gegeben: Schachbrett
Uninformierte Suche in Java Informierte Suchverfahren Stephan Schwiebert WS 2008/2009 Sprachliche Informationsverarbeitung Institut für Linguistik Universität zu Köln 8-Damen-Problem Gegeben: Schachbrett
9. Heuristische Suche
 9. Heuristische Suche Prof. Dr. Rudolf Kruse University of Magdeburg Faculty of Computer Science Magdeburg, Germany [email protected] S Heuristische Suche Idee: Wir nutzen eine (heuristische)
9. Heuristische Suche Prof. Dr. Rudolf Kruse University of Magdeburg Faculty of Computer Science Magdeburg, Germany [email protected] S Heuristische Suche Idee: Wir nutzen eine (heuristische)
Beispiele. mit. Beispiel 2.3. Suche einen Weg von nach. Tiefensuche bzw. Breitensuche.
 2. Suchverfahren Uninformierte Suchverfahren Beispiel 2.4. Ein Weinhändler hat drei Krüge, einen von 9 Liter, einen von 7 Liter und einen von 4 Liter Inhalt. Auf den Krügen sind keine Litermarkierungen
2. Suchverfahren Uninformierte Suchverfahren Beispiel 2.4. Ein Weinhändler hat drei Krüge, einen von 9 Liter, einen von 7 Liter und einen von 4 Liter Inhalt. Auf den Krügen sind keine Litermarkierungen
Intelligente Systeme
 Intelligente Systeme Heuristische Suchalgorithmen Prof. Dr. R. Kruse C. Braune {rudolf.kruse,christian.braune}@ovgu.de Institut für Intelligente Kooperierende Systeme Fakultät für Informatik Otto-von-Guericke-Universität
Intelligente Systeme Heuristische Suchalgorithmen Prof. Dr. R. Kruse C. Braune {rudolf.kruse,christian.braune}@ovgu.de Institut für Intelligente Kooperierende Systeme Fakultät für Informatik Otto-von-Guericke-Universität
Übersicht. Informierte (heuristische) Suche. Algorithmus Bester-Zuerst-Suche. Bester-Zuerst-Suche
 Suche. Algorithmus Bester-Zuerst-Suche. Bester-Zuerst-Suche") Übersicht I Künstliche Intelligenz II Problemlösen 3. Problemlösen durch Suche 4. Informierte Suchmethoden 5. Constraint-Probleme 6. Spiele III Wissen und Schlußfolgern IV Logisch Handeln V Unsicheres
Übersicht I Künstliche Intelligenz II Problemlösen 3. Problemlösen durch Suche 4. Informierte Suchmethoden 5. Constraint-Probleme 6. Spiele III Wissen und Schlußfolgern IV Logisch Handeln V Unsicheres
Einführung in die Methoden der Künstlichen Intelligenz
 Einführung in die Methoden der Künstlichen --- Vorlesung vom 21.4.2009 --- Informierte Suche Suche mit Vorwissen Ingo J. Timm, René Schumann Professur für Wirtschaftsinformatik und Simulation (IS) Wiederholung
Einführung in die Methoden der Künstlichen --- Vorlesung vom 21.4.2009 --- Informierte Suche Suche mit Vorwissen Ingo J. Timm, René Schumann Professur für Wirtschaftsinformatik und Simulation (IS) Wiederholung
Wissensbasierte Suche
 Wissensbasierte Suche Jürgen Dorn Inhalt uninformierte Suche wissensbasierte Suche A* und IDA* Algorithmus Suche in Und/Oder-Graphen Jürgen Dorn 2003 Wissensbasierte Suche 1 Suche Suche in (expliziten
Wissensbasierte Suche Jürgen Dorn Inhalt uninformierte Suche wissensbasierte Suche A* und IDA* Algorithmus Suche in Und/Oder-Graphen Jürgen Dorn 2003 Wissensbasierte Suche 1 Suche Suche in (expliziten
Einführung in Suchverfahren
 Einführung in Suchverfahren Alfred Kranstedt 0.0.0 Seminar Intelligente Algorithmen Was ist heute Thema?. Was ist ein Suchproblem? Definitionen, Darstellungen etc.. Suchstrategien Blinde Suche Heuristische
Einführung in Suchverfahren Alfred Kranstedt 0.0.0 Seminar Intelligente Algorithmen Was ist heute Thema?. Was ist ein Suchproblem? Definitionen, Darstellungen etc.. Suchstrategien Blinde Suche Heuristische
Informierte Suchverfahren
 Informierte Suchverfahren Für größere Suchbäume sind Breiten- und Tiefesuche nicht effizient genug. Vielversprechender sind Ansätze, bei denen Problemwissen zur Steuerung des Suchprozesses eingesetzt wird.
Informierte Suchverfahren Für größere Suchbäume sind Breiten- und Tiefesuche nicht effizient genug. Vielversprechender sind Ansätze, bei denen Problemwissen zur Steuerung des Suchprozesses eingesetzt wird.
Heuristische Suche. Uninformierte (blinde) Suchverfahren. erzeugen systematisch neue Knoten im Suchbaum und führen jeweils den Zieltest durch;
 Suchverfahren. erzeugen systematisch neue Knoten im Suchbaum und führen jeweils den Zieltest durch;") Heuristische Suche Uninformierte (blinde) Suchverfahren erzeugen systematisch neue Knoten im Suchbaum und führen jeweils den Zieltest durch; verwenden keine problemspezifische Zusatzinformation. Informierte
Heuristische Suche Uninformierte (blinde) Suchverfahren erzeugen systematisch neue Knoten im Suchbaum und führen jeweils den Zieltest durch; verwenden keine problemspezifische Zusatzinformation. Informierte
Startzustand. Mögliche heuristische Funktionen:
 Informierte Suchverfahren Für größere Suchbäume sind Breiten- und Tiefensuche nicht effizient genug. Vielversprechender sind Ansätze, bei denen Problemwissen zur Steuerung des Suchprozesses eingesetzt
Informierte Suchverfahren Für größere Suchbäume sind Breiten- und Tiefensuche nicht effizient genug. Vielversprechender sind Ansätze, bei denen Problemwissen zur Steuerung des Suchprozesses eingesetzt
Algorithmen und Datenstrukturen 2-1. Seminar -
 Algorithmen und Datenstrukturen 2-1. Seminar - Dominic Rose Bioinformatics Group, University of Leipzig Sommersemster 2010 Outline 1. Übungsserie: 3 Aufgaben, insgesamt 30 28 Punkte A1 Spannbäume (10 8
Algorithmen und Datenstrukturen 2-1. Seminar - Dominic Rose Bioinformatics Group, University of Leipzig Sommersemster 2010 Outline 1. Übungsserie: 3 Aufgaben, insgesamt 30 28 Punkte A1 Spannbäume (10 8
8.1 Blinde Suche. Grundlagen der Künstlichen Intelligenz. Klassische Suche: Überblick. 8. Klassische Suche: Breitensuche und uniforme Kostensuche
 Grundlagen der Künstlichen Intelligenz 17. März 2014 8. Klassische Suche: Breitensuche und uniforme Kostensuche Grundlagen der Künstlichen Intelligenz 8. Klassische Suche: Breitensuche und uniforme Kostensuche
Grundlagen der Künstlichen Intelligenz 17. März 2014 8. Klassische Suche: Breitensuche und uniforme Kostensuche Grundlagen der Künstlichen Intelligenz 8. Klassische Suche: Breitensuche und uniforme Kostensuche
Algorithmen und Datenstrukturen
 Algorithmen und Datenstrukturen Prof. Martin Lercher Institut für Informatik Heinrich-Heine-Universität Düsseldorf Teil 10 Suche in Graphen Version vom 13. Dezember 2016 1 / 2 Vorlesung 2016 / 2017 2 /
Algorithmen und Datenstrukturen Prof. Martin Lercher Institut für Informatik Heinrich-Heine-Universität Düsseldorf Teil 10 Suche in Graphen Version vom 13. Dezember 2016 1 / 2 Vorlesung 2016 / 2017 2 /
Einführung in die Methoden der Künstlichen Intelligenz
 Einführung in die Methoden der Künstlichen --- Vorlesung vom 24.4.2007 --- Sommersemester 2007 Prof. Dr. Ingo J. Timm, Andreas D. Lattner Professur für Wirtschaftsinformatik und Simulation (IS) 3. Uninformierte
Einführung in die Methoden der Künstlichen --- Vorlesung vom 24.4.2007 --- Sommersemester 2007 Prof. Dr. Ingo J. Timm, Andreas D. Lattner Professur für Wirtschaftsinformatik und Simulation (IS) 3. Uninformierte
Einführung in die Methoden der Künstlichen Intelligenz. Suchverfahren / Uninformierte Suche
 Einführung in die Methoden der Künstlichen Intelligenz Suchverfahren / Uninformierte Suche PD Dr. David Sabel SoSe 0 Stand der Folien:. pril 0 Einführung Blind Search n-damen Missionare & Kannibalen Modellierung
Einführung in die Methoden der Künstlichen Intelligenz Suchverfahren / Uninformierte Suche PD Dr. David Sabel SoSe 0 Stand der Folien:. pril 0 Einführung Blind Search n-damen Missionare & Kannibalen Modellierung
Breitensuche BFS (Breadth First Search)
") Breitensuche BFS (Breadth First Search) Algorithmus BREITENSUCHE EINGABE: G = (V, E) als Adjazenzliste, Startknoten s V 1 Für alle v V 1 If (v = s) then d[v] 0 else d[v] ; 2 pred[v] nil; 2 Q new Queue;
Breitensuche BFS (Breadth First Search) Algorithmus BREITENSUCHE EINGABE: G = (V, E) als Adjazenzliste, Startknoten s V 1 Für alle v V 1 If (v = s) then d[v] 0 else d[v] ; 2 pred[v] nil; 2 Q new Queue;
Ein Graph ist ein Paar (V,E), wobei V eine Menge von Knoten und E eine Menge von Kanten (v,w) mit v,w in V ist.
, wobei V eine Menge von Knoten und E eine Menge von Kanten (v,w) mit v,w in V ist.") Graphen Definition: Ein Graph ist ein Paar (V,E), wobei V eine Menge von Knoten und E eine Menge von Kanten (v,w) mit v,w in V ist. Begriffe: Gerichteter Graph: Alle Kanten haben eine Richtung vom Anfangsknoten
Graphen Definition: Ein Graph ist ein Paar (V,E), wobei V eine Menge von Knoten und E eine Menge von Kanten (v,w) mit v,w in V ist. Begriffe: Gerichteter Graph: Alle Kanten haben eine Richtung vom Anfangsknoten
Motivation für Suchverfahren. Einführung in die Methoden der Künstlichen Intelligenz. Suchverfahren / Uninformierte Suche
 Motivation für Suchverfahren Einführung in die Methoden der Künstlichen Intelligenz Suchverfahren / Uninformierte Suche Prof. Dr. Manfred Schmidt-Schauß SoSe 06 Beispiele: Spiele: Suche nach dem besten
Motivation für Suchverfahren Einführung in die Methoden der Künstlichen Intelligenz Suchverfahren / Uninformierte Suche Prof. Dr. Manfred Schmidt-Schauß SoSe 06 Beispiele: Spiele: Suche nach dem besten
Graphenalgorithmen I
 Graphenalgorithmen I Vortrag im Seminar Hallo Welt! für Fortgeschrittene 7. Juni 211 Graphenalgorithmen I 1/33 Motivation Problem Wie komme ich am schnellsten ins Kanapee? Problem Wie kommt ein Datenpaket
Graphenalgorithmen I Vortrag im Seminar Hallo Welt! für Fortgeschrittene 7. Juni 211 Graphenalgorithmen I 1/33 Motivation Problem Wie komme ich am schnellsten ins Kanapee? Problem Wie kommt ein Datenpaket
Datenstrukturen und Algorithmen
 Prof. Dr. Erika Ábrahám Datenstrukturen und Algorithmen 1/1 Datenstrukturen und Algorithmen Vorlesung 14: Prof. Dr. Erika Ábrahám Theorie Hybrider Systeme Informatik 2 http://ths.rwth-aachen.de/teaching/ss-14/
Prof. Dr. Erika Ábrahám Datenstrukturen und Algorithmen 1/1 Datenstrukturen und Algorithmen Vorlesung 14: Prof. Dr. Erika Ábrahám Theorie Hybrider Systeme Informatik 2 http://ths.rwth-aachen.de/teaching/ss-14/
Intelligente Systeme. Suche
 Intelligente Systeme Suche Michael Schroeder www.biotec.tu-dredsen.de/schroeder Lehrbuch Folien basieren auf Russell und Norvig: Künstliche Intelligenz: Ein Moderner Ansatz. Dank an Prof. Fürnkranz für
Intelligente Systeme Suche Michael Schroeder www.biotec.tu-dredsen.de/schroeder Lehrbuch Folien basieren auf Russell und Norvig: Künstliche Intelligenz: Ein Moderner Ansatz. Dank an Prof. Fürnkranz für
Algorithmische Graphentheorie
 Algorithmische Graphentheorie Vorlesung 7 und 8: Euler- und Hamilton-Graphen Babeş-Bolyai Universität, Department für Informatik, Cluj-Napoca [email protected] 17. April 2018 1/96 WIEDERHOLUNG Eulersche
Algorithmische Graphentheorie Vorlesung 7 und 8: Euler- und Hamilton-Graphen Babeş-Bolyai Universität, Department für Informatik, Cluj-Napoca [email protected] 17. April 2018 1/96 WIEDERHOLUNG Eulersche
Grundlagen der Künstlichen Intelligenz
 Grundlagen der Künstlichen Intelligenz 9. Klassische Suche: Baumsuche und Graphensuche Malte Helmert Universität Basel 13. März 2015 Klassische Suche: Überblick Kapitelüberblick klassische Suche: 5. 7.
Grundlagen der Künstlichen Intelligenz 9. Klassische Suche: Baumsuche und Graphensuche Malte Helmert Universität Basel 13. März 2015 Klassische Suche: Überblick Kapitelüberblick klassische Suche: 5. 7.
Teil 3. Suchverfahren
 Teil 3 Suchverfahren Überblick Suchproblem Allgemeines Suchverfahren Nicht informierte Suche Informierte Suche Iterative Suche Spiele Beispiel 1 Beispiel 1 Beispiel 1 SUCHPROBLEME Problemlösen durch Suche
Teil 3 Suchverfahren Überblick Suchproblem Allgemeines Suchverfahren Nicht informierte Suche Informierte Suche Iterative Suche Spiele Beispiel 1 Beispiel 1 Beispiel 1 SUCHPROBLEME Problemlösen durch Suche
4.2 Minimale Spannbäume: Der Algorithmus von Jarník/Prim Definition 4.2.1
 Allgemeines. Minimale Spannbäume: Der Algorithmus von Jarník/Prim Definition.. (a) Ein Graph G =(V, E) heißt kreisfrei, wenn er keinen Kreis besitzt. Beispiel: Ein kreisfreier Graph: FG KTuEA, TU Ilmenau
Allgemeines. Minimale Spannbäume: Der Algorithmus von Jarník/Prim Definition.. (a) Ein Graph G =(V, E) heißt kreisfrei, wenn er keinen Kreis besitzt. Beispiel: Ein kreisfreier Graph: FG KTuEA, TU Ilmenau
Euler und Hamiltonkreise
 Euler und Hamiltonkreise 1. Königsberger Brücken 2. Eulerwege und Kreise Definition, Algorithmus mit Tiefensuche 3. Hamiltonwege und Kreise Definition 4. Problem des Handlungsreisenden Enumeration und
Euler und Hamiltonkreise 1. Königsberger Brücken 2. Eulerwege und Kreise Definition, Algorithmus mit Tiefensuche 3. Hamiltonwege und Kreise Definition 4. Problem des Handlungsreisenden Enumeration und
Lösungshinweise zu Blatt 8 und Blatt 9 GIN2-SS04
 Lösungshinweise zu Blatt 8 und Blatt 9 GIN2-SS04 er Baum zum Zustandsgraphen UI UI 0 1 2 3 4 UI 5 6 7 8 UI UI UI UI UI 9 0 1 2 3 4 5 6 7 9 K30 K31 K32 K33 K35 K36 K37 K38 K39 K41 K42 K43 K44 K45 8 K34
Lösungshinweise zu Blatt 8 und Blatt 9 GIN2-SS04 er Baum zum Zustandsgraphen UI UI 0 1 2 3 4 UI 5 6 7 8 UI UI UI UI UI 9 0 1 2 3 4 5 6 7 9 K30 K31 K32 K33 K35 K36 K37 K38 K39 K41 K42 K43 K44 K45 8 K34
Übersicht. Künstliche Intelligenz: 3. Problemlösen durch Suche Frank Puppe 1
 Übersicht I Künstliche Intelligenz II Problemlösen 3. Problemlösen durch Suche 4. Informierte Suchmethoden 5. Constraint-Probleme 6. Spiele III Wissen und Schlußfolgern IV Logisch Handeln V Unsicheres
Übersicht I Künstliche Intelligenz II Problemlösen 3. Problemlösen durch Suche 4. Informierte Suchmethoden 5. Constraint-Probleme 6. Spiele III Wissen und Schlußfolgern IV Logisch Handeln V Unsicheres
Heuristische Suchverfahren
 Heuristische Suchverfahren Suchprozesse sind ein wichtiger Bestandteil unterschiedlicher Problemlöseverfahren z.b. Bestimmung der Konfliktmenge in Produktionssystemen Suche nach resolvierbaren Klauseln
Heuristische Suchverfahren Suchprozesse sind ein wichtiger Bestandteil unterschiedlicher Problemlöseverfahren z.b. Bestimmung der Konfliktmenge in Produktionssystemen Suche nach resolvierbaren Klauseln
Kapitel 5: Suchverfahren: Backtracking
 Kapitel 5: Suchverfahren: Backtracking Prof. Dr. F. Otto (Universität Kassel) Entwurf und Analyse von Algorithmen 278 / 541 Suchverfahren: Backtracking Viele Probleme lassen sich als Suchprobleme formulieren.
Kapitel 5: Suchverfahren: Backtracking Prof. Dr. F. Otto (Universität Kassel) Entwurf und Analyse von Algorithmen 278 / 541 Suchverfahren: Backtracking Viele Probleme lassen sich als Suchprobleme formulieren.
Fortgeschrittene Netzwerk- und Graph-Algorithmen
 Fortgeschrittene Netzwerk- und Graph-Algorithmen Prof. Dr. Hanjo Täubig Lehrstuhl für Effiziente Algorithmen (Prof. Dr. Ernst W. Mayr) Institut für Informatik Technische Universität München Wintersemester
Fortgeschrittene Netzwerk- und Graph-Algorithmen Prof. Dr. Hanjo Täubig Lehrstuhl für Effiziente Algorithmen (Prof. Dr. Ernst W. Mayr) Institut für Informatik Technische Universität München Wintersemester
3.2 Generischer minimaler Spannbaum-Algorithmus
 3.2 Generischer minimaler Spannbaum-Algorithmus Initialisiere Wald F von Bäumen, jeder Baum ist ein singulärer Knoten (jedes v V bildet einen Baum) while Wald F mehr als einen Baum enthält do wähle einen
3.2 Generischer minimaler Spannbaum-Algorithmus Initialisiere Wald F von Bäumen, jeder Baum ist ein singulärer Knoten (jedes v V bildet einen Baum) while Wald F mehr als einen Baum enthält do wähle einen
Optimale Lösungen mit Greedy-Strategie erfordern Optimalität der Greedy-Wahl. Beispiele für optimale Greedy-Lösungen
 Wiederholung Optimale Lösungen mit Greedy-Strategie erfordern Optimalität der Greedy-Wahl unabhängig von Subproblemen Optimalität der Subprobleme Beispiele für optimale Greedy-Lösungen Scheduling Problem
Wiederholung Optimale Lösungen mit Greedy-Strategie erfordern Optimalität der Greedy-Wahl unabhängig von Subproblemen Optimalität der Subprobleme Beispiele für optimale Greedy-Lösungen Scheduling Problem
Grundlagen der KI + Reasoning Agents
 Grundlagen der KI + Reasoning Agents Prof. Thielscher Welche heuristischen Suchverfahren gibt es? Erläutern Sie A* am Beispiel. Aufbau und Schlussfolgerungen von Bayesschen Netzen. Thielscher drängt auf
Grundlagen der KI + Reasoning Agents Prof. Thielscher Welche heuristischen Suchverfahren gibt es? Erläutern Sie A* am Beispiel. Aufbau und Schlussfolgerungen von Bayesschen Netzen. Thielscher drängt auf
8.1 Einleitung. Grundlagen der Künstlichen Intelligenz. 8.1 Einleitung. 8.2 Lokale Suchverfahren. 8.3 Zusammenfassung. Suchprobleme: Überblick
 Grundlagen der Künstlichen Intelligenz 5. April 0 8. Suchalgorithmen: Lokale Suche Grundlagen der Künstlichen Intelligenz 8. Suchalgorithmen: Lokale Suche 8.1 Einleitung Malte Helmert Universität Basel
Grundlagen der Künstlichen Intelligenz 5. April 0 8. Suchalgorithmen: Lokale Suche Grundlagen der Künstlichen Intelligenz 8. Suchalgorithmen: Lokale Suche 8.1 Einleitung Malte Helmert Universität Basel
Proseminar Online Algorithmen, Prof. Dr. Rolf Klein
 Proseminar Online Algorithmen, Prof. Dr. Rolf Klein Vortrag von Michael Daumen am 13.12.2000 Thema : Minimum Spanning Tree und 2-Approximation der TSP-Tour Inhalt des Vortrags : 1. genaue Vorstellung des
Proseminar Online Algorithmen, Prof. Dr. Rolf Klein Vortrag von Michael Daumen am 13.12.2000 Thema : Minimum Spanning Tree und 2-Approximation der TSP-Tour Inhalt des Vortrags : 1. genaue Vorstellung des
Programmierkurs Prolog, SS 2000
 Programmierkurs Prolog SS 2000 Universitaet Dortmund nach Joachims 1998 Suche Repräsentation von Bäumen Repräsentation von Graphen Suchstrategien DFS, BFS, Iterative Deepening, Locale Heuristiken, Globale
Programmierkurs Prolog SS 2000 Universitaet Dortmund nach Joachims 1998 Suche Repräsentation von Bäumen Repräsentation von Graphen Suchstrategien DFS, BFS, Iterative Deepening, Locale Heuristiken, Globale
Suchverfahren. Kapitel Algorithmische Suche
 Kapitel 2 Suchverfahren 2.1 Algorithmische Suche Oft hat man in einer vorgegebenen Problemlösungs-Situation die Aufgabe, einen bestimmten Zweck zu erreichen, einen (Aktions-)Plan für einen Agenten zu entwickeln,
Kapitel 2 Suchverfahren 2.1 Algorithmische Suche Oft hat man in einer vorgegebenen Problemlösungs-Situation die Aufgabe, einen bestimmten Zweck zu erreichen, einen (Aktions-)Plan für einen Agenten zu entwickeln,
Datenstrukturen und Algorithmen 2. Klausur SS 2001
 UNIVERSITÄT PADERBORN FACHBEREICH 7 (MATHEMATIK INFORMATIK) Datenstrukturen und Algorithmen 2. Klausur SS 200 Lösungsansätze Dienstag, 8. September 200 Name, Vorname:...................................................
UNIVERSITÄT PADERBORN FACHBEREICH 7 (MATHEMATIK INFORMATIK) Datenstrukturen und Algorithmen 2. Klausur SS 200 Lösungsansätze Dienstag, 8. September 200 Name, Vorname:...................................................
10. Übungsblatt zu Algorithmen I im SS 2010
 Karlsruher Institut für Technologie Institut für Theoretische Informatik Prof. Dr. Peter Sanders G.V. Batz, C. Schulz, J. Speck 0. Übungsblatt zu Algorithmen I im SS 00 http//algo.iti.kit.edu/algorithmeni.php
Karlsruher Institut für Technologie Institut für Theoretische Informatik Prof. Dr. Peter Sanders G.V. Batz, C. Schulz, J. Speck 0. Übungsblatt zu Algorithmen I im SS 00 http//algo.iti.kit.edu/algorithmeni.php
Definition Ein gerichteter Graph G = (V, E) ist ein Graph von geordneten Paaren (u, v) mit u V und v V.
 ist ein Graph von geordneten Paaren (u, v) mit u V und v V.") Kapitel 4 Graphenalgorithmen 4.1 Definitionen Definition 4.1.1. Der Graph G = (V, E) ist über die beiden Mengen V und E definiert, wobei V die Menge der Knoten und E die Menge der Kanten in dem Graph ist.
Kapitel 4 Graphenalgorithmen 4.1 Definitionen Definition 4.1.1. Der Graph G = (V, E) ist über die beiden Mengen V und E definiert, wobei V die Menge der Knoten und E die Menge der Kanten in dem Graph ist.
Algorithmen II Vorlesung am
 Algorithmen II Vorlesung am 07..0 Minimale Schnitte in Graphen INSTITUT FÜR THEORETISCHE INFORMATIK PROF. DR. DOROTHEA WAGNER KIT Universität des Landes Baden-Württemberg und Algorithmen nationales Forschungszentrum
Algorithmen II Vorlesung am 07..0 Minimale Schnitte in Graphen INSTITUT FÜR THEORETISCHE INFORMATIK PROF. DR. DOROTHEA WAGNER KIT Universität des Landes Baden-Württemberg und Algorithmen nationales Forschungszentrum
Das Heiratsproblem. Definition Matching
 Das Heiratsproblem Szenario: Gegeben: n Frauen und m > n Männer. Bekanntschaftsbeziehungen zwischen allen Männern und Frauen. Fragestellung: Wann gibt es für jede der Frauen einen Heiratspartner? Modellierung
Das Heiratsproblem Szenario: Gegeben: n Frauen und m > n Männer. Bekanntschaftsbeziehungen zwischen allen Männern und Frauen. Fragestellung: Wann gibt es für jede der Frauen einen Heiratspartner? Modellierung
Übungsblatt 2 Lösungen
 rundlagen der Künstlichen Intelligenz Prof. Dr. J. Boedecker, Prof. Dr. W. Burgard, Prof. Dr. F. Hutter, Prof. Dr. B. Nebel M. Krawez, T. chulte ommersemester 08 Universität Freiburg Institut für Informatik
rundlagen der Künstlichen Intelligenz Prof. Dr. J. Boedecker, Prof. Dr. W. Burgard, Prof. Dr. F. Hutter, Prof. Dr. B. Nebel M. Krawez, T. chulte ommersemester 08 Universität Freiburg Institut für Informatik
Algorithmik WS 07/ Vorlesung, Andreas Jakoby Universität zu Lübeck. 10 Matching-Probleme
 10 Matching-Probleme 10.1 Definition von Matching-Probleme Definition 21 [2-dimensionales Matching] Sei G = (V, E) ein ungerichteter Graph und E E. E ist ein Matching, wenn für alle Kantenpaare e 1, e
10 Matching-Probleme 10.1 Definition von Matching-Probleme Definition 21 [2-dimensionales Matching] Sei G = (V, E) ein ungerichteter Graph und E E. E ist ein Matching, wenn für alle Kantenpaare e 1, e
Algorithmen II Vorlesung am
 Algorithmen II Vorlesung am 0..0 Minimale Schnitte in Graphen INSTITUT FÜR THEORETISCHE INFORMATIK PROF. DR. DOROTHEA WAGNER KIT Universität des Landes Baden-Württemberg und Algorithmen nationales Forschungszentrum
Algorithmen II Vorlesung am 0..0 Minimale Schnitte in Graphen INSTITUT FÜR THEORETISCHE INFORMATIK PROF. DR. DOROTHEA WAGNER KIT Universität des Landes Baden-Württemberg und Algorithmen nationales Forschungszentrum
Das Problem des Handlungsreisenden
 Seite 1 Das Problem des Handlungsreisenden Abbildung 1: Alle möglichen Rundreisen für 4 Städte Das TSP-Problem tritt in der Praxis in vielen Anwendungen als Teilproblem auf. Hierzu gehören z.b. Optimierungsprobleme
Seite 1 Das Problem des Handlungsreisenden Abbildung 1: Alle möglichen Rundreisen für 4 Städte Das TSP-Problem tritt in der Praxis in vielen Anwendungen als Teilproblem auf. Hierzu gehören z.b. Optimierungsprobleme
Algorithmentheorie. 10 Greedy Verfahren
 Algorithmentheorie 0 Greedy Verfahren Prof. Dr. S. Albers Greedy Verfahren. Allgemeine Vorbemerkungen 2. Einfache Beispiele Münzwechselproblem Handlungsreisenden-Problem 3. Das Aktivitäten Auswahlproblem
Algorithmentheorie 0 Greedy Verfahren Prof. Dr. S. Albers Greedy Verfahren. Allgemeine Vorbemerkungen 2. Einfache Beispiele Münzwechselproblem Handlungsreisenden-Problem 3. Das Aktivitäten Auswahlproblem
Programm heute. Algorithmen und Datenstrukturen (für ET/IT) Übersicht: Graphen. Definition: Ungerichteter Graph. Definition: Ungerichteter Graph
 Übersicht: Graphen. Definition: Ungerichteter Graph. Definition: Ungerichteter Graph") Programm heute Algorithmen und Datenstrukturen (für ET/IT) Sommersemester 07 Dr. Stefanie Demirci Computer Aided Medical Procedures Technische Universität München 7 Fortgeschrittene Datenstrukturen Graphen
Programm heute Algorithmen und Datenstrukturen (für ET/IT) Sommersemester 07 Dr. Stefanie Demirci Computer Aided Medical Procedures Technische Universität München 7 Fortgeschrittene Datenstrukturen Graphen
Einfacher Problemlösungsagent. Übersicht. Begriffsdefinitionen für Einfach-Probleme
 Übersicht I Künstliche Intelligenz II Problemlösen 3. Problemlösen durch Suche 4. Informierte Suchmethoden 5. Constraint-Probleme 6. Spiele III Wissen und Schlußfolgern IV Logisch Handeln V Unsicheres
Übersicht I Künstliche Intelligenz II Problemlösen 3. Problemlösen durch Suche 4. Informierte Suchmethoden 5. Constraint-Probleme 6. Spiele III Wissen und Schlußfolgern IV Logisch Handeln V Unsicheres
Algorithmen und Datenstrukturen (für ET/IT)
") Algorithmen und Datenstrukturen (für ET/IT) Sommersemester 05 Dr. Tobias Lasser Computer Aided Medical Procedures Technische Universität München Programm heute Einführung Grundlagen von Algorithmen Grundlagen
Algorithmen und Datenstrukturen (für ET/IT) Sommersemester 05 Dr. Tobias Lasser Computer Aided Medical Procedures Technische Universität München Programm heute Einführung Grundlagen von Algorithmen Grundlagen
Betriebliche Optimierung
 Betriebliche Optimierung Joachim Schauer Institut für Statistik und OR Uni Graz Joachim Schauer ( Institut für Statistik und OR Uni Graz Betriebliche ) Optimierung 1 / 22 1 Das Travelling Salesperson Problem
Betriebliche Optimierung Joachim Schauer Institut für Statistik und OR Uni Graz Joachim Schauer ( Institut für Statistik und OR Uni Graz Betriebliche ) Optimierung 1 / 22 1 Das Travelling Salesperson Problem
9.1 Tiefensuche. Grundlagen der Künstlichen Intelligenz. 9.1 Tiefensuche. 9.2 Iterative Tiefensuche. 9.3 Blinde Suche: Zusammenfassung
 Grundlagen der Künstlichen Intelligenz 21. März 2014 9. Klassische Suche: Tiefensuche und iterative Tiefensuche Grundlagen der Künstlichen Intelligenz 9. Klassische Suche: Tiefensuche und iterative Tiefensuche
Grundlagen der Künstlichen Intelligenz 21. März 2014 9. Klassische Suche: Tiefensuche und iterative Tiefensuche Grundlagen der Künstlichen Intelligenz 9. Klassische Suche: Tiefensuche und iterative Tiefensuche
Berechnung von Abständen
 3. Kreis- und Wegeprobleme Abstände in Graphen Abstände in Graphen Definition 3.4. Es sei G = (V, E) ein Graph. Der Abstand d(v, w) zweier Knoten v, w V ist die minimale Länge eines Weges von v nach w.
3. Kreis- und Wegeprobleme Abstände in Graphen Abstände in Graphen Definition 3.4. Es sei G = (V, E) ein Graph. Der Abstand d(v, w) zweier Knoten v, w V ist die minimale Länge eines Weges von v nach w.
Datenstrukturen. einfach verkettete Liste
 einfach verkettete Liste speichert Daten in einer linearen Liste, in der jedes Element auf das nächste Element zeigt Jeder Knoten der Liste enthält beliebige Daten und einen Zeiger auf den nächsten Knoten
einfach verkettete Liste speichert Daten in einer linearen Liste, in der jedes Element auf das nächste Element zeigt Jeder Knoten der Liste enthält beliebige Daten und einen Zeiger auf den nächsten Knoten
Vorlesung Datenstrukturen
 Vorlesung Datenstrukturen Graphen (1) Darstellung Traversierung Dr. Frank Seifert Vorlesung Datenstrukturen - Sommersemester 2016 Folie 441 Generalisierung von Bäumen Verallgemeinerung (von Listen zu Graphen)
Vorlesung Datenstrukturen Graphen (1) Darstellung Traversierung Dr. Frank Seifert Vorlesung Datenstrukturen - Sommersemester 2016 Folie 441 Generalisierung von Bäumen Verallgemeinerung (von Listen zu Graphen)
1 Einführung. 2 Grundlagen von Algorithmen. 3 Grundlagen von Datenstrukturen. 4 Grundlagen der Korrektheit von Algorithmen
 Programm heute Algorithmen und Datenstrukturen (für ET/IT) Sommersemester 0 Dr. Stefanie Demirci Computer Aided Medical Procedures Technische Universität München Einführung Grundlagen von Algorithmen Grundlagen
Programm heute Algorithmen und Datenstrukturen (für ET/IT) Sommersemester 0 Dr. Stefanie Demirci Computer Aided Medical Procedures Technische Universität München Einführung Grundlagen von Algorithmen Grundlagen
Kombinatorische Optimierung
 Juniorprof. Dr. Henning Meyerhenke 1 Henning Meyerhenke: KIT Universität des Landes Baden-Württemberg und nationales Forschungszentrum in der Helmholtz-Gemeinschaft www.kit.edu Vorlesung 16 Programm: Einführung
Juniorprof. Dr. Henning Meyerhenke 1 Henning Meyerhenke: KIT Universität des Landes Baden-Württemberg und nationales Forschungszentrum in der Helmholtz-Gemeinschaft www.kit.edu Vorlesung 16 Programm: Einführung
12. Graphen. Notation, Repräsentation, Traversieren (DFS, BFS), Topologisches Sortieren, Ottman/Widmayer, Kap ,Cormen et al, Kap.
, Topologisches Sortieren, Ottman/Widmayer, Kap ,Cormen et al, Kap.") 254 12. Graphen Notation, Repräsentation, Traversieren (DFS, BFS), Topologisches Sortieren, Ottman/Widmayer, Kap. 9.1-9.4,Cormen et al, Kap. 22 Königsberg 1736 255 Königsberg 1736 255 Königsberg 1736 255
254 12. Graphen Notation, Repräsentation, Traversieren (DFS, BFS), Topologisches Sortieren, Ottman/Widmayer, Kap. 9.1-9.4,Cormen et al, Kap. 22 Königsberg 1736 255 Königsberg 1736 255 Königsberg 1736 255
Einführung in die Künstliche Intelligenz SS 18 Prof. Dr. J. Fürnkranz, Prof. Dr. K. Kersting
 Einführung in die Künstliche Intelligenz SS 8 Prof. Dr. J. Fürnkranz, Prof. Dr. K. Kersting Beispiellösung für das. Übungsblatt (5.05.208) Aufgabe Agenten-Umgebung a) Eine beispielhafte PEAS-Beschreibung
Einführung in die Künstliche Intelligenz SS 8 Prof. Dr. J. Fürnkranz, Prof. Dr. K. Kersting Beispiellösung für das. Übungsblatt (5.05.208) Aufgabe Agenten-Umgebung a) Eine beispielhafte PEAS-Beschreibung
Der Branching-Operator B
 Branching 1 / 17 Der Branching-Operator B Unser Ziel: Löse das allgemeine Minimierungsproblem minimiere f (x), so dass Lösung(x). B zerlegt eine Menge von Lösungen in disjunkte Teilmengen. Die wiederholte
Branching 1 / 17 Der Branching-Operator B Unser Ziel: Löse das allgemeine Minimierungsproblem minimiere f (x), so dass Lösung(x). B zerlegt eine Menge von Lösungen in disjunkte Teilmengen. Die wiederholte
Algorithmische Methoden für schwere Optimierungsprobleme
 Algorithmische Methoden für schwere Optimierungsprobleme Prof. Dr. Henning Meyerhenke Institut für Theoretische Informatik 1 KIT Henning Universität desmeyerhenke, Landes Baden-Württemberg Institutund
Algorithmische Methoden für schwere Optimierungsprobleme Prof. Dr. Henning Meyerhenke Institut für Theoretische Informatik 1 KIT Henning Universität desmeyerhenke, Landes Baden-Württemberg Institutund
3. Minimale Spannbäume. Definition 99 T heißt minimaler Spannbaum (MSB, MST) von G, falls T Spannbaum von G ist und gilt:
 von G, falls T Spannbaum von G ist und gilt:") 3. Minimale Spannbäume Sei G = (V, E) ein einfacher ungerichteter Graph, der o.b.d.a. zusammenhängend ist. Sei weiter w : E R eine Gewichtsfunktion auf den Kanten von G. Wir setzen E E: w(e ) = e E w(e),
3. Minimale Spannbäume Sei G = (V, E) ein einfacher ungerichteter Graph, der o.b.d.a. zusammenhängend ist. Sei weiter w : E R eine Gewichtsfunktion auf den Kanten von G. Wir setzen E E: w(e ) = e E w(e),
Lösungen von Übungsblatt 12
 Lösungen von Übungsblatt 12 Algorithmen (WS 2018, Ulrike von Luxburg) Lösungen zu Aufgabe 1 Eine (kanonische) Möglichkeit, die Branch-Schritte auszuführen ergibt sich wie folgt: Das ursprüngliche Problem
Lösungen von Übungsblatt 12 Algorithmen (WS 2018, Ulrike von Luxburg) Lösungen zu Aufgabe 1 Eine (kanonische) Möglichkeit, die Branch-Schritte auszuführen ergibt sich wie folgt: Das ursprüngliche Problem
Kapitel 3: Kürzeste Pfade Gliederung der Vorlesung
 Gliederung der Vorlesung 1. Grundbegriffe 2. Elementare Graphalgorithmen und Anwendungen 3. Kürzeste Wege 4. Minimale spannende Bäume 5. Färbungen und Cliquen 6. Traveling Salesman Problem 7. Flüsse in
Gliederung der Vorlesung 1. Grundbegriffe 2. Elementare Graphalgorithmen und Anwendungen 3. Kürzeste Wege 4. Minimale spannende Bäume 5. Färbungen und Cliquen 6. Traveling Salesman Problem 7. Flüsse in
Betriebswirtschaftliche Optimierung
 Institut für Statistik und OR Uni Graz 1 Das Travelling Salesperson Problem 2 Das Travelling Salesperson Problem Zentrales Problem der Routenplanung Unzählige wissenschaftliche Artikel theoretischer sowie
Institut für Statistik und OR Uni Graz 1 Das Travelling Salesperson Problem 2 Das Travelling Salesperson Problem Zentrales Problem der Routenplanung Unzählige wissenschaftliche Artikel theoretischer sowie
Lernmodul 7 Algorithmus von Dijkstra
 Folie 1 von 30 Lernmodul 7 Algorithmus von Dijkstra Quelle: http://www.map24.de Folie 2 von 30 Algorithmus von Dijkstra Übersicht Kürzester Weg von A nach B in einem Graphen Problemstellung: Suche einer
Folie 1 von 30 Lernmodul 7 Algorithmus von Dijkstra Quelle: http://www.map24.de Folie 2 von 30 Algorithmus von Dijkstra Übersicht Kürzester Weg von A nach B in einem Graphen Problemstellung: Suche einer
Betriebliche Optimierung
 Betriebliche Optimierung Joachim Schauer Joachim Schauer Betriebliche Optimierung 1 / 31 1 Metaheuristische Verfahren 2 Joachim Schauer Betriebliche Optimierung 2 / 31 Einleitendes Metaheuristische Verfahren
Betriebliche Optimierung Joachim Schauer Joachim Schauer Betriebliche Optimierung 1 / 31 1 Metaheuristische Verfahren 2 Joachim Schauer Betriebliche Optimierung 2 / 31 Einleitendes Metaheuristische Verfahren
Ferienkurs zur algorithmischen diskreten Mathematik Kapitel 1: Grundlagen der algorithmischen Graphentheorie
 Ferienkurs zur algorithmischen diskreten Mathematik Kapitel 1: Grundlagen der algorithmischen Graphentheorie Dipl-Math. Wolfgang Kinzner 2.4.2012 Kapitel 1: Grundlagen der algorithmischen Graphgentheorie
Ferienkurs zur algorithmischen diskreten Mathematik Kapitel 1: Grundlagen der algorithmischen Graphentheorie Dipl-Math. Wolfgang Kinzner 2.4.2012 Kapitel 1: Grundlagen der algorithmischen Graphgentheorie