Elementare Geometrie Vorlesung 6
|
|
|
- Hilke Kaufer
- vor 5 Jahren
- Abrufe
Transkript
1 Elementare Geometrie Vorlesung 6 Thomas Zink
2 1.Bewegungen Definition Es sei E eine Ebene. Eine Abbildung f : E E heißt eine Bewegung, wenn sie die folgenden Eigenschaften hat: (1) f ist bijektiv. (2) f bildet Geraden auf Geraden ab. (3) Für alle A, B E gilt: f(a)f(b) = AB (4) Es liege P rechts (bzw. links) von der orientierten Strecke AB. Dann liegt f(p ) rechts (bzw. links) von der orientierten Strecke f(a)f(b).
3 2.Bewegungen Proposition Es seien f, g : E E zwei Bewegungen. Dann ist auch das Kompositum f g eine Bewegung. Es sei f : E E eine Bewegung mit zwei verschiedenen Fixpunkten. Dann gilt f = id E.
4 3. Beweis des ersten Teils der Proposition Wir zeigen, dass f g die Eigenschaft (3) besitzt. Es seien A, B E. Es sei A = g(a) und B = g(b). Dann gilt (f g)(a) = f(g(a)) = f(a ), (f g)(b) = f(g(b)) = f(b ). Da f und g die Eigenschaft (3) haben folgt: (f g)(a)(f g)(b) = f(a )f(b ) = A B = g(a)g(b) = AB.
5 4. Beweis der Proposition 2.Teil Es sei f(a) = A, f(b) = B, wo A B. Es sei P ein Punkt, der rechts von der orientierten Strecke AB liegt. Es sei a = AP, b = BP. Es sei K a der Kreis um A mit dem Radius a und es sei K b der Kreis um B mit dem Radius b. Genau einer der beiden Schnittpunkte K a K b liegt rechts von AB und das ist P.
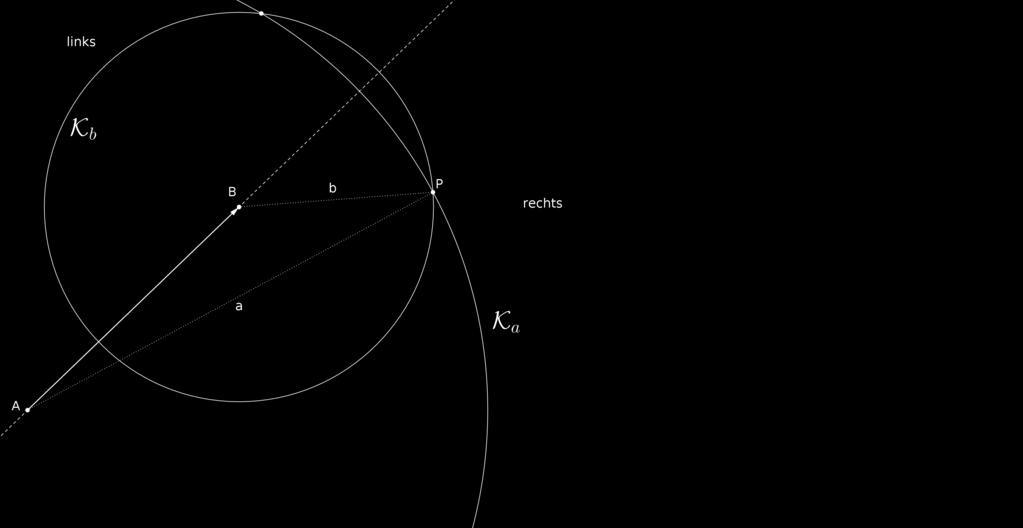
6
7 5.Beweis der Proposition 2.Teil Es gilt: Es folgt: a = f(a)f(p ) = Af(P ), b = f(b)f(p ) = Bf(P ) f(p ) K a K b. Da f(p ) rechts von f(a)f(b) = AB liegt, folgern wir f(p ) = P. Also: Wenn P außerhalb einer Geraden liegt auf der f zwei Fixpunkte hat, so gilt f(p ) = P. Folglich f = id E. Q.E.D.
8 6.Bewegungen Jede Translation und jede Drehung ist offensichtlich eine Bewegung. Damit ist auch jedes Kompositum von Translationen und Drehungen eine Bewegung. Proposition Es seien AB und CD zwei Strecken in E, so dass AB = CD 0. Dann gibt es genau eine Bewegung f : E E, so dass f(a) = C und f(b) = D.
9 7.Beweis der Proposition Wir zeigen zuerst, dass es höchstens eine Bewegung mit den geforderten Eigenschaften geben kann. Es sei g eine Bewegung, so dass g(a) = C und g(b) = D. Dann gilt g 1 (C) = A und g 1 (D) = B. Folglich hat die Bewegung g 1 f zwei verschiedene Fixpunkte A und B. Nach Proposition Blatt 3 folgt Dann folgt g 1 f = id E. g = g id E = g g 1 f = id E f = f.
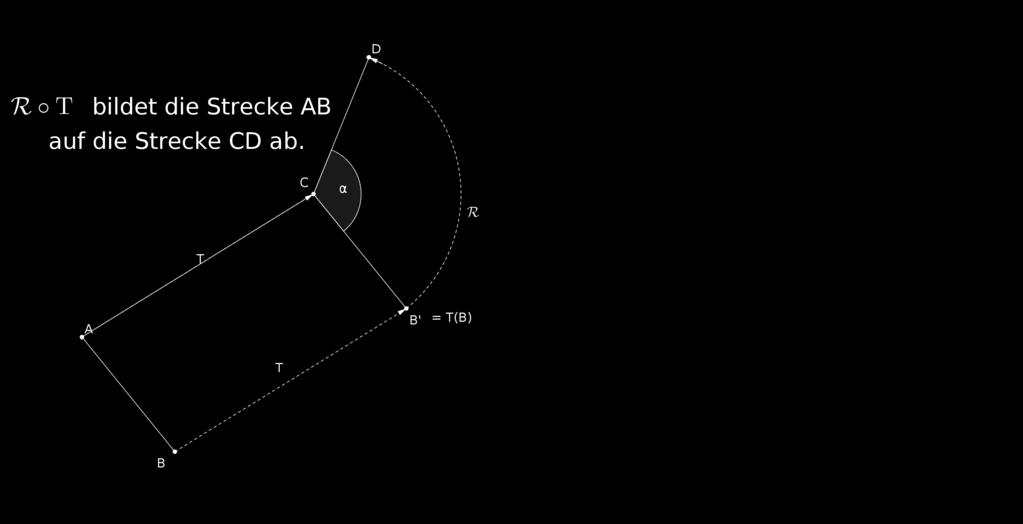
10 8.Beweis der Proposition Wir zeigen jetzt die Existenz der Bewegung f. Es sei T = AC. Es sei B = T (B). Wir haben: CB = T (A)T (B) = AB = CD. Also liegen B und D auf einem Kreis mit dem Mittelpunkt C und dem Radius r := AB. Also existiert eine Drehung R um den Punkt C, so dass R(B ) = D. Dann gilt: (R T )(A) = C, (R T )(B) = D. Also ist f := R T wie gewünscht. Q.E.D.
11
12 9.Eine Bewegung mit Fixpunkt ist eine Drehung Corollary Es sei f : E E eine Bewegung, die einen Fixpunkt besitzt. Dann ist f eine Drehung.
13 10. Beweis des Korollars Beweis: Es sei F der Fixpunkt. Es sei A F ein weiterer Punkt. Dann gilt AF = f(a)f(f ) = f(a)f. Also liegen A und f(a) aus einem Kreis mit dem Mittelpunkt F. Folglich existiert eine Drehung R mit dem Fixpunkt F, so dass R(A) = f(a). Da es nach der Proposition Blatt 6 höchstens eine Bewegung gibt, die die orientierte Strecke F A auf F f(a) abbildet, folgt f = R, Q.E.D.

14 11. Fixpunkt von R T.

15 12. Fixpunkt von R T.

16 13. Fixpunkt von R T.
17 14.Eine Bewegung ohne Fixpunkt ist eine Translation Proposition Es sei f : E E eine Bewegung, die keinen Fixpunkt besitzt. Dann ist f eine Translation. Folgender Begriff ist nützlich. Definition Es sei f : E E eine Bewegung. Eine Gerade g E heißt invariant, wenn f(g) = g. Die letzte Gleichung bedeutet: P g f(p ) g
18 15. Invariante Geraden Lemma Wenn sich zwei verschiedene invariante Geraden g und h von f in genau einem Punkt P schneiden, so ist P ein Fixpunkt von f.
19 15. Invariante Geraden Lemma Wenn sich zwei verschiedene invariante Geraden g und h von f in genau einem Punkt P schneiden, so ist P ein Fixpunkt von f. Beweis: Nach Voraussetzung gilt P = g h und weiter f(p ) g und f(p ) h. Also gilt f(p ) g h. Da es nur einen Schnittpunkt gibt, finden wir f(p ) = P. Beispiel: Es sei M E und ϑ = D(M, 180 o ) die Drehung um 180 O. Eine Gerade ist genau dann ϑ-invariant, wenn sie durch M geht.

20 16. Eine 180 o -Drehung heißt Punktspieglung
21 17. Die Invarianten Geraden einer Translation Es sei T : E E eine Translation, so dass T id E. Dann sind die invarianten Geraden genau die Geraden der Form AT (A). Durch jeden Punkt von E geht genau eine invariante Gerade. Insbesondere sind alle invearianten Geraden parallel.

22 18. Die Invarianten Geraden einer Translation
23 18. Beweis der Proposition Blatt 14 f möge keinen Fixpunkt haben. Es sei A E. Wir behaupten, dass die Punkte A, f(a), f 2 (A) := (f f)(a) auf einer Geraden liegen. Wenn das nicht der Fall ist liegen sie auf einem Kreis und sind alle verschieden. Da Af(A) = f(a)f 2 (A), gibt es eine Drehung ϑ um den Mittelpunkt M des Kreises, so dass ϑ(a) = f(a), ϑ(f(a)) = f 2 (A).
24 19. Beweis der Proposition Blatt 14
25 20. Beweis der Proposition Blatt 14 Da sowohl f als auch ϑ die Strecke Af(A) auf die Strecke Af(A) abbilden, folgt f = ϑ. Das ist ein Widerspruch zu der Annahme, dass f keinen Fixpunkt hat. Die Punkte A, f(a), f 2 (A) liegen also stets auf einer Geraden.
26 19. Beweis der Proposition Blatt 14 Es sei g die Gerade Af(A). Auf der Geraden f(g) liegen die Punkte f(a), f 2 (A) g. Also gilt f(g) = g.
27 19. Beweis der Proposition Blatt 14 Es sei g die Gerade Af(A). Auf der Geraden f(g) liegen die Punkte f(a), f 2 (A) g. Also gilt f(g) = g. Also geht durch jeden Punkt A E eine invariante Gerade und alle invarianten Geraden sind parallel, da f keine Fixpunkte hat.
28 19. Beweis der Proposition Blatt 14 Wir fixieren einen Punkt P E und betrachten die Translation S : E E, so dass S(f(P )) = P. Die Translation S hat die gleichen invarianten Geraden wir f, nämlich die Parallelen zu P f(p ). Damit hat auch S f diese invarianten Geraden.
29 19. Beweis der Proposition Blatt 14 Wir fixieren einen Punkt P E und betrachten die Translation S : E E, so dass S(f(P )) = P. Die Translation S hat die gleichen invarianten Geraden wir f, nämlich die Parallelen zu P f(p ). Damit hat auch S f diese invarianten Geraden. Andrerseits hat S f den Fixpunkt P und somit eine Drehung ϑ. Es sei h eine invariante Gerade, die nicht durch P geht. Da ϑ(h) = h muss der Drehwinkel von ϑ gleich 0 sein.
Elementare Geometrie Vorlesung 7
 Elementare Geometrie Vorlesung 7 Thomas Zink 15.5.2017 1.Bewegungen Proposition Es seien AB und CD zwei Strecken in E, so dass AB = CD 0. Dann gibt es genau eine Bewegung f : E E, so dass f(a) = C und
Elementare Geometrie Vorlesung 7 Thomas Zink 15.5.2017 1.Bewegungen Proposition Es seien AB und CD zwei Strecken in E, so dass AB = CD 0. Dann gibt es genau eine Bewegung f : E E, so dass f(a) = C und
Elementare Geometrie Vorlesung 2
 Elementare Geometrie Vorlesung 2 Thomas Zink 24.4.2017 Vierecke Definition Ein Viereck ABCD ist ein Streckenzug aus vier Strecken AB, BC,CD, DA ohne Selbstüberschneidungen. Vierecke Definition Ein Viereck
Elementare Geometrie Vorlesung 2 Thomas Zink 24.4.2017 Vierecke Definition Ein Viereck ABCD ist ein Streckenzug aus vier Strecken AB, BC,CD, DA ohne Selbstüberschneidungen. Vierecke Definition Ein Viereck
Elementare Geometrie Vorlesung 4
 Elementare Geometrie Vorlesung 4 Thomas Zink 3.5.2017 1. Der Drehwinkel zwischen zwei Strahlen Es seien s und t zwei Strahlen in der Ebene mit dem gleichen Anfangspunkt A. Man legt ein Ziffernblatt um
Elementare Geometrie Vorlesung 4 Thomas Zink 3.5.2017 1. Der Drehwinkel zwischen zwei Strahlen Es seien s und t zwei Strahlen in der Ebene mit dem gleichen Anfangspunkt A. Man legt ein Ziffernblatt um
Elementare Geometrie Wiederholung 3
 Elementare Geometrie Wiederholung 3 Thomas Zink 10.7.2017 1.Schwerpunkt und Teilverhältnis, V13, Es seien A, B, C, D Punkte, die auf einer Geraden liegen, und so dass A B und C D. AB = λ CD λ = AB CD.
Elementare Geometrie Wiederholung 3 Thomas Zink 10.7.2017 1.Schwerpunkt und Teilverhältnis, V13, Es seien A, B, C, D Punkte, die auf einer Geraden liegen, und so dass A B und C D. AB = λ CD λ = AB CD.
Elementare Geometrie Vorlesung 16
 Elementare Geometrie Vorlesung 16 Thomas Zink 19.6.2017 1.Homothetien Definition Es sei E eine Ebene. Eine Homothetie h : E E ist eine bijektive Abbildung, so dass (1) Wenn a E eine Gerade ist, so ist
Elementare Geometrie Vorlesung 16 Thomas Zink 19.6.2017 1.Homothetien Definition Es sei E eine Ebene. Eine Homothetie h : E E ist eine bijektive Abbildung, so dass (1) Wenn a E eine Gerade ist, so ist
Elementare Geometrie Vorlesung 9
 Elementare Geometrie Vorlesung 9 Thomas Zink 22.5.2017 1. Spieglung von Winkeln Es sei s g : E E die Spieglung an einer Geraden g. Es seien u, v zwei Strahlen. Dann gilt: (s g (u), s g (v)) = (u, v). 2.
Elementare Geometrie Vorlesung 9 Thomas Zink 22.5.2017 1. Spieglung von Winkeln Es sei s g : E E die Spieglung an einer Geraden g. Es seien u, v zwei Strahlen. Dann gilt: (s g (u), s g (v)) = (u, v). 2.
Elementare Geometrie Vorlesung 10
 Elementare Geometrie Vorlesung 10 Thomas Zink 24.5.2017 1.Kongruenz von Dreiecken Es sei E eine Ebene. Wir verstehen in dieser Vorlesung unter einem Dreieck eine Folge von drei Punkten ABC in E, die nicht
Elementare Geometrie Vorlesung 10 Thomas Zink 24.5.2017 1.Kongruenz von Dreiecken Es sei E eine Ebene. Wir verstehen in dieser Vorlesung unter einem Dreieck eine Folge von drei Punkten ABC in E, die nicht
Elementare Geometrie Vorlesung 11
 Elementare Geometrie Vorlesung 11 Thomas Zink 29.5.2017 1.Verhältnisse Es sei g eine Gerade. Es seien A, B, C, D g vier Punkte, so dass A B und C D. Wir definieren: AB CD = AB CD, wenn die Strahlen AB
Elementare Geometrie Vorlesung 11 Thomas Zink 29.5.2017 1.Verhältnisse Es sei g eine Gerade. Es seien A, B, C, D g vier Punkte, so dass A B und C D. Wir definieren: AB CD = AB CD, wenn die Strahlen AB
Elementare Geometrie Vorlesung 12
 Elementare Geometrie Vorlesung 12 Thomas Zink 31.5.2017 1.Die Winkelhalbierende Es seien s und t zwei Strahlen, die sich in einem Punkt O schneiden. Es sei (s, t) < 180 o. Die Winkelfläche besteht aus
Elementare Geometrie Vorlesung 12 Thomas Zink 31.5.2017 1.Die Winkelhalbierende Es seien s und t zwei Strahlen, die sich in einem Punkt O schneiden. Es sei (s, t) < 180 o. Die Winkelfläche besteht aus
Vorlesung Winter 2009/2010 Elementare Geometrie
 Vorlesung Winter 2009/2010 Elementare Geometrie 1 Homothetien Es sei Z E ein Punkt der Ebene. Es sei λ 0 eine reelle Zahl. Die zentrale Homothetie mit dem Zentrum Z und dem Streckungsfaktor λ ist folgende
Vorlesung Winter 2009/2010 Elementare Geometrie 1 Homothetien Es sei Z E ein Punkt der Ebene. Es sei λ 0 eine reelle Zahl. Die zentrale Homothetie mit dem Zentrum Z und dem Streckungsfaktor λ ist folgende
Elementare Geometrie Vorlesung 19
 Elementare Geometrie Vorlesung 19 Thomas Zink 28.6.2017 1.Gleichungen von Kreisen Es sei OAB ein kartesisches Koordinatensystem der Ebene E. Für einen Punkt P mit den Koordinaten (x, y) schreiben wir auch
Elementare Geometrie Vorlesung 19 Thomas Zink 28.6.2017 1.Gleichungen von Kreisen Es sei OAB ein kartesisches Koordinatensystem der Ebene E. Für einen Punkt P mit den Koordinaten (x, y) schreiben wir auch
Elementare Geometrie Vorlesung 17
 Elementare Geometrie Vorlesung 17 Thomas Zink 21.6.2017 1.Ähnlichkeiten Definition Eine Ähnlichkeit f : E E ist eine bijektive Abbildung, so dass (1) Wenn a E eine Gerade ist, so ist auch f(a) eine Gerade.
Elementare Geometrie Vorlesung 17 Thomas Zink 21.6.2017 1.Ähnlichkeiten Definition Eine Ähnlichkeit f : E E ist eine bijektive Abbildung, so dass (1) Wenn a E eine Gerade ist, so ist auch f(a) eine Gerade.
Geraden-Schnittpunkte
 Geraden-Schnittpunkte Erinnerung: Axiom. Durch zwei verschiedene Punkte geht höchstens eine Gerade. Anders ausgedrückt: Seien P und Q Punkte und g und h Geraden. Wenn g und h durch P und Q gehen... und
Geraden-Schnittpunkte Erinnerung: Axiom. Durch zwei verschiedene Punkte geht höchstens eine Gerade. Anders ausgedrückt: Seien P und Q Punkte und g und h Geraden. Wenn g und h durch P und Q gehen... und
Elementare Geometrie Vorlesung 13
 Elementare Geometrie Vorlesung 13 Thomas Zink 7.6.2017 1.Vektoren Es sei E eine Ebene. Eine Translation T : E E wird auch als Vektor bezeichnet. Wenn O, A E, so gibt es genau einen Vektor T, so dass T
Elementare Geometrie Vorlesung 13 Thomas Zink 7.6.2017 1.Vektoren Es sei E eine Ebene. Eine Translation T : E E wird auch als Vektor bezeichnet. Wenn O, A E, so gibt es genau einen Vektor T, so dass T
Elementare Geometrie Vorlesung 1
 Elementare Geometrie Vorlesung 1 Thomas Zink 19.4.2017 Mengen und Abbildungen Eine Menge ist eine Zusammenfassung von wohlbestimmten Objekten unseres Denkens. (Objekte = Elemente) P Menge bedeutet: Das
Elementare Geometrie Vorlesung 1 Thomas Zink 19.4.2017 Mengen und Abbildungen Eine Menge ist eine Zusammenfassung von wohlbestimmten Objekten unseres Denkens. (Objekte = Elemente) P Menge bedeutet: Das
Elementare Geometrie Vorlesung 18
 Elementare Geometrie Vorlesung 18 Thomas Zink 26.6.2017 1.Bild eines Vektors bei einer affinen Abbildung Es sei f : E E eine affine Abbildung von Ebenen. Es sei v ein Vektor der Ebene E, d.h. eine Translation.
Elementare Geometrie Vorlesung 18 Thomas Zink 26.6.2017 1.Bild eines Vektors bei einer affinen Abbildung Es sei f : E E eine affine Abbildung von Ebenen. Es sei v ein Vektor der Ebene E, d.h. eine Translation.
Gleitspiegelung und Verkettungen von Spiegelung und Parallelverschiebung
 Gleitspiegelung und Verkettungen von Spiegelung und Parallelverschiebung Def. Eine Gleitspiegelung ist eine Spiegelung an einer Geraden (Spiegelachse) verknüpft mit einer Translation parallel zu dieser
Gleitspiegelung und Verkettungen von Spiegelung und Parallelverschiebung Def. Eine Gleitspiegelung ist eine Spiegelung an einer Geraden (Spiegelachse) verknüpft mit einer Translation parallel zu dieser
Elementare Geometrie Wiederholung 1
 Elementare Geometrie Wiederholung 1 Thomas Zink 3.7.2017 Parallelverschiebung, Aufgabe 1 Es seien g und h zwei Geraden. Es sei AB eine Strecke. Man zeichne eine Strecke A 1 B 1, die die beiden Geraden
Elementare Geometrie Wiederholung 1 Thomas Zink 3.7.2017 Parallelverschiebung, Aufgabe 1 Es seien g und h zwei Geraden. Es sei AB eine Strecke. Man zeichne eine Strecke A 1 B 1, die die beiden Geraden
37 II.1. Abbildungen
 37 II.1. Abbildungen "Abbildung" und "Funktion" sind verschiedene Namen für denselben Begriff, der charakterisiert ist durch die Angabe der Definitionsmenge ("Was wird abgebildet?"), der Wertemenge ("Wohin
37 II.1. Abbildungen "Abbildung" und "Funktion" sind verschiedene Namen für denselben Begriff, der charakterisiert ist durch die Angabe der Definitionsmenge ("Was wird abgebildet?"), der Wertemenge ("Wohin
D-MATH, D-PHYS, D-CHAB Analysis I HS 2017 Prof. Manfred Einsiedler. Lösung 4
 D-MATH, D-PHYS, D-CHAB Analysis I HS 017 Prof. Manfred Einsiedler Lösung 4 Hinweise 1. Zeigen Sie, dass inf X die kleinste obere Schranke von X ist.. Dass z 1, z Lösungen sind, kann man durch Einsetzen
D-MATH, D-PHYS, D-CHAB Analysis I HS 017 Prof. Manfred Einsiedler Lösung 4 Hinweise 1. Zeigen Sie, dass inf X die kleinste obere Schranke von X ist.. Dass z 1, z Lösungen sind, kann man durch Einsetzen
Universität Bielefeld. Elementare Geometrie. Sommersemester Grundlagen. Stefan Witzel
 Universität Bielefeld Elementare Geometrie Sommersemester 2018 Grundlagen Stefan Witzel Punkte, Abstand Die Euklidische Ebene E 2 besteht aus Punkten. Zwei Punkte P, Q E 2 haben einen Abstand PQ 0. Axiome
Universität Bielefeld Elementare Geometrie Sommersemester 2018 Grundlagen Stefan Witzel Punkte, Abstand Die Euklidische Ebene E 2 besteht aus Punkten. Zwei Punkte P, Q E 2 haben einen Abstand PQ 0. Axiome
Universität Bielefeld. Elementare Geometrie. Sommersemester Grundlagen. Stefan Witzel
 Universität Bielefeld Elementare Geometrie Sommersemester 2018 Grundlagen Stefan Witzel Punkte, Abstand Die Euklidische Ebene E 2 besteht aus Punkten. Zwei Punkte P, Q E 2 haben einen Abstand PQ 0. Axiome
Universität Bielefeld Elementare Geometrie Sommersemester 2018 Grundlagen Stefan Witzel Punkte, Abstand Die Euklidische Ebene E 2 besteht aus Punkten. Zwei Punkte P, Q E 2 haben einen Abstand PQ 0. Axiome
Klausurenkurs zum Staatsexamen (WS 2016/17): Lineare Algebra und analytische Geometrie 7
: Lineare Algebra und analytische Geometrie 7") Dr. Erwin Schörner Klausurenkurs zum Staatsexamen (WS 6/7): Lineare Algebra und analytische Geometrie 7 7. (Frühjahr 5, Thema, Aufgabe ) Sei V ein reeller Vektorraum. a) Wann nennt man eine Teilmenge U
Dr. Erwin Schörner Klausurenkurs zum Staatsexamen (WS 6/7): Lineare Algebra und analytische Geometrie 7 7. (Frühjahr 5, Thema, Aufgabe ) Sei V ein reeller Vektorraum. a) Wann nennt man eine Teilmenge U
Modulprüfung BA 04 Mathematik: Grundlagen der Mathematik C: Geometrie, Algebra und Zahlentheorie
 FB 3: Mathematik/Naturwissenschaften Mathematisches Institut Prof. Dr. R. Frank / Dr. D. Habeck Modulprüfung BA 04 Mathematik: Grundlagen der Mathematik C: Geometrie, Algebra und Zahlentheorie 12.04.2012
FB 3: Mathematik/Naturwissenschaften Mathematisches Institut Prof. Dr. R. Frank / Dr. D. Habeck Modulprüfung BA 04 Mathematik: Grundlagen der Mathematik C: Geometrie, Algebra und Zahlentheorie 12.04.2012
Übungen zu Geometrie (LGy) Universität Regensburg, Sommersemester 2014 Dr. Raphael Zentner, Dr. Olaf Müller
 Universität Regensburg, Sommersemester 2014 Dr. Raphael Zentner, Dr. Olaf Müller") Übungen zu Geometrie (LGy) Universität Regensburg, Sommersemester 2014 Dr. Raphael Zentner, Dr. Olaf Müller Übungsblatt 13 Dieses Übungsblatt wird nicht mehr zur Abgabe vorgesehen. Es dient der Wiederholung
Übungen zu Geometrie (LGy) Universität Regensburg, Sommersemester 2014 Dr. Raphael Zentner, Dr. Olaf Müller Übungsblatt 13 Dieses Übungsblatt wird nicht mehr zur Abgabe vorgesehen. Es dient der Wiederholung
Prof. Dr. Elmar Grosse-Klönne Institut für Mathematik
 Prof. Dr. Elmar Grosse-Klönne Institut für Mathematik Lineare Algebra Analytische Geometrie I* Übungsaufgaben, Blatt Musterlösungen Aufgabe. Es seien A, B, C Teilmengen einer Menge X. Zeige: i A B C =
Prof. Dr. Elmar Grosse-Klönne Institut für Mathematik Lineare Algebra Analytische Geometrie I* Übungsaufgaben, Blatt Musterlösungen Aufgabe. Es seien A, B, C Teilmengen einer Menge X. Zeige: i A B C =
Klausurenkurs zum Staatsexamen (WS 2015/16): Lineare Algebra und analytische Geometrie 7
: Lineare Algebra und analytische Geometrie 7") Dr. Erwin Schörner Klausurenkurs zum Staatsexamen (WS 5/6): Lineare Algebra und analytische Geometrie 7 7. (Frühjahr 5, Thema, Aufgabe ) Sei V ein reeller Vektorraum. a) Wann nennt man eine Teilmenge U
Dr. Erwin Schörner Klausurenkurs zum Staatsexamen (WS 5/6): Lineare Algebra und analytische Geometrie 7 7. (Frühjahr 5, Thema, Aufgabe ) Sei V ein reeller Vektorraum. a) Wann nennt man eine Teilmenge U
Geometrie. Homepage zur Veranstaltung: Lehre Geometrie
 Geometrie 5.1 Geometrie Homepage zur Veranstaltung: http://www.juergen-roth.de Lehre Geometrie Geometrie 5.2 Inhaltsverzeichnis Geometrie 0 Geometrie!? 1 Axiome der Elementargeometrie 2 Kongruenzabbildungen
Geometrie 5.1 Geometrie Homepage zur Veranstaltung: http://www.juergen-roth.de Lehre Geometrie Geometrie 5.2 Inhaltsverzeichnis Geometrie 0 Geometrie!? 1 Axiome der Elementargeometrie 2 Kongruenzabbildungen
eine O fixierende Bewegung.
 1. Bewegungen der hyperbolischen Ebene Sei nun H eine hyperbolische Ebene. Dann erhält man dieselben Klassen von Bewegungen wie im Euklidischen Fall und eine weitere Klasse. Wir haben oben nur ein einziges
1. Bewegungen der hyperbolischen Ebene Sei nun H eine hyperbolische Ebene. Dann erhält man dieselben Klassen von Bewegungen wie im Euklidischen Fall und eine weitere Klasse. Wir haben oben nur ein einziges
8 Gruppen und Körper
 8 Gruppen und Körper (8.) Definition: Eine Gruppe G ist eine Menge zusammen mit einer Verknüpfung, die jedem Paar (a,b) von Elementen aus G ein weiteres Element a?b aus G zuordnet, so dass die folgenden
8 Gruppen und Körper (8.) Definition: Eine Gruppe G ist eine Menge zusammen mit einer Verknüpfung, die jedem Paar (a,b) von Elementen aus G ein weiteres Element a?b aus G zuordnet, so dass die folgenden
Klausurenkurs zum Staatsexamen (SS 2015): Lineare Algebra und analytische Geometrie 7
: Lineare Algebra und analytische Geometrie 7") Dr. Erwin Schörner Klausurenkurs zum Staatsexamen (SS 5): Lineare Algebra und analytische Geometrie 7 7. (Frühjahr, Thema, Aufgabe 4) Im R seien die beiden Ebenen E : 6 x + 4 y z = und E : + s + t 4 gegeben.
Dr. Erwin Schörner Klausurenkurs zum Staatsexamen (SS 5): Lineare Algebra und analytische Geometrie 7 7. (Frühjahr, Thema, Aufgabe 4) Im R seien die beiden Ebenen E : 6 x + 4 y z = und E : + s + t 4 gegeben.
Lemma 10. Die Menge Aff (K n ) aller Affinitäten von K n ist eine Gruppe bezüglich der Verkettung. Beweis. (vgl. Lemma 39 LAAG I sowie
 aller Affinitäten von K n ist eine Gruppe bezüglich der Verkettung. Beweis. (vgl. Lemma 39 LAAG I sowie") Lemma 10. Die Menge Aff (K n ) aller Affinitäten von K n ist eine Gruppe bezüglich der Verkettung. Beweis. (vgl. Lemma 39 LAAG I sowie Noch ein Beispiel aus Vorl. 1, Seite 10) Zuerst zeigen wir, dass jede
Lemma 10. Die Menge Aff (K n ) aller Affinitäten von K n ist eine Gruppe bezüglich der Verkettung. Beweis. (vgl. Lemma 39 LAAG I sowie Noch ein Beispiel aus Vorl. 1, Seite 10) Zuerst zeigen wir, dass jede
Affine Eigenschaften ( stets K = R)
") Affine Eigenschaften ( stets K = R) Def. 15 Sei M eine Teilmenge eines affinen Raums A über V (über K). Eine Eigenschaft der Menge M heißt affin, wenn für jede Affinität F : A A 1 die Bildmenge {F(a)wobei
Affine Eigenschaften ( stets K = R) Def. 15 Sei M eine Teilmenge eines affinen Raums A über V (über K). Eine Eigenschaft der Menge M heißt affin, wenn für jede Affinität F : A A 1 die Bildmenge {F(a)wobei
Mathematische Probleme, SS 2018 Dienstag $Id: dreieck.tex,v /06/12 14:54:26 hk Exp $
 $Id: dreieck.tex,v 1.47 018/06/1 14:54:6 hk Exp $ Dreiecke.3 Einige spezielle Punkte im Dreieck Am Ende der letzten Sitzung hatten wir eingesehen, dass sich die drei Winkelhalbierenden eines Dreiecks in
$Id: dreieck.tex,v 1.47 018/06/1 14:54:6 hk Exp $ Dreiecke.3 Einige spezielle Punkte im Dreieck Am Ende der letzten Sitzung hatten wir eingesehen, dass sich die drei Winkelhalbierenden eines Dreiecks in
Drehung um einen Punkt um Winkel α.
 Drehung um einen Punkt um Winkel α. Sei A R 2 und α R. Drehung um A um Winkel α ist eine Abbildung D A (α) : R 2 R 2 welche wie folgt definiert ist: D A (α) = T A D 0 (α) T ( A), wobei die Abbildung D
Drehung um einen Punkt um Winkel α. Sei A R 2 und α R. Drehung um A um Winkel α ist eine Abbildung D A (α) : R 2 R 2 welche wie folgt definiert ist: D A (α) = T A D 0 (α) T ( A), wobei die Abbildung D
LA 1 WS 08/09 Zettel 1
 LA 1 WS 08/09 Zettel 1 Nils Mahrt 31. Oktober 2008 1. Aufgabe Sei f : X Y eine Abbildung. (a) Für A X ist zu zeigen, dass A f 1 (f(a)) ist. Sei also x A, dann ist zu zeigen, dass x f 1 (f(a)). Es gilt,
LA 1 WS 08/09 Zettel 1 Nils Mahrt 31. Oktober 2008 1. Aufgabe Sei f : X Y eine Abbildung. (a) Für A X ist zu zeigen, dass A f 1 (f(a)) ist. Sei also x A, dann ist zu zeigen, dass x f 1 (f(a)). Es gilt,
Strahlensätze und Ähnliches
 Strahlensätze und Ähnliches Dr. Elke Warmuth Sommersemester 2018 1 / 27 Zentrische Streckung Strahlensätze Ähnliche Figuren 2 / 27 Was ist hier passiert? 3 / 27 Zentrische Streckung mit Streckungszentrum
Strahlensätze und Ähnliches Dr. Elke Warmuth Sommersemester 2018 1 / 27 Zentrische Streckung Strahlensätze Ähnliche Figuren 2 / 27 Was ist hier passiert? 3 / 27 Zentrische Streckung mit Streckungszentrum
Warum konnten wir Inversionen so erfolgreich beim Lösen von schulgeometrischen Aufgaben anwenden?
 Warum konnten wir Inversionen so erfolgreich beim Lösen von schulgeometrischen Aufgaben anwenden? Weil bei einigen Aufgaben die Problemstellung einfacher wird, wenn wir Inversionen anwenden, die Aufgabenstellung
Warum konnten wir Inversionen so erfolgreich beim Lösen von schulgeometrischen Aufgaben anwenden? Weil bei einigen Aufgaben die Problemstellung einfacher wird, wenn wir Inversionen anwenden, die Aufgabenstellung
10 Untermannigfaltigkeiten
 10. Untermannigfaltigkeiten 1 10 Untermannigfaltigkeiten Definition. Eine Menge M R n heißt k-dimensionale Untermannigfaltigkeit des R n, 1 k n, falls es zu jedem a M eine offene Umgebung U R n von a und
10. Untermannigfaltigkeiten 1 10 Untermannigfaltigkeiten Definition. Eine Menge M R n heißt k-dimensionale Untermannigfaltigkeit des R n, 1 k n, falls es zu jedem a M eine offene Umgebung U R n von a und
Lösungsvorschläge für die Geometrie-Klausur vom 28.7.
 Lösungsvorschläge für die Geometrie-Klausur vom 28.7. Aufgabe 1: (a) Die beiden Punkte liegen offensichtlich auf der hyperbolischen Geraden g = {z H R(z) = 1}. Die beiden idealen Punkte sind a = 1, b =.
Lösungsvorschläge für die Geometrie-Klausur vom 28.7. Aufgabe 1: (a) Die beiden Punkte liegen offensichtlich auf der hyperbolischen Geraden g = {z H R(z) = 1}. Die beiden idealen Punkte sind a = 1, b =.
2. Isometrien oder Kongruenzabbildungen
 6 2. Isometrien oder Kongruenzabbildungen 2.1 Einführende Überlegungen Kongruente Figuren sind deckungsgleiche Figuren. Eine Figur wird so bewegt, dass sie mit einer anderen Figur zur Deckung gebracht
6 2. Isometrien oder Kongruenzabbildungen 2.1 Einführende Überlegungen Kongruente Figuren sind deckungsgleiche Figuren. Eine Figur wird so bewegt, dass sie mit einer anderen Figur zur Deckung gebracht
Mathematik I. Vorlesung 27. Differenzierbare Funktionen. In diesem Abschnitt betrachten wir Funktionen f :D K, wobei D K eine offene Menge in K ist.
 Prof. Dr. H. Brenner Osnabrück WS 2009/2010 Mathematik I Vorlesung 27 Differenzierbare Funktionen In diesem Abschnitt betrachten wir Funktionen, wobei D K eine offene Menge in K ist. Definition 27.1. Sei
Prof. Dr. H. Brenner Osnabrück WS 2009/2010 Mathematik I Vorlesung 27 Differenzierbare Funktionen In diesem Abschnitt betrachten wir Funktionen, wobei D K eine offene Menge in K ist. Definition 27.1. Sei
Übungen zu Logik und Künstliche Intelligenz mit Musterlösungen 1 Blatt 11
 Heilbronn, den 18.6.2010 Prof. Dr. V. Stahl WS 10/11 Übungen zu Logik und Künstliche Intelligenz mit Musterlösungen 1 Blatt 11 Aufgabe 1. Schreiben Sie auf wann ein Tripel (A, B, R) eine partielle Funktion,
Heilbronn, den 18.6.2010 Prof. Dr. V. Stahl WS 10/11 Übungen zu Logik und Künstliche Intelligenz mit Musterlösungen 1 Blatt 11 Aufgabe 1. Schreiben Sie auf wann ein Tripel (A, B, R) eine partielle Funktion,
Seminararbeit zum Thema Translationen und Schiefkörper
 Seminararbeit zum Thema Translationen und Schiefkörper Miriam Hraßnigg 9. Januar 2013 1 Inhaltsverzeichnis 1 Translationen 3 2 Der Schiefkörper 7 2 1 Translationen Beginnen wir damit uns zwei schon lange
Seminararbeit zum Thema Translationen und Schiefkörper Miriam Hraßnigg 9. Januar 2013 1 Inhaltsverzeichnis 1 Translationen 3 2 Der Schiefkörper 7 2 1 Translationen Beginnen wir damit uns zwei schon lange
Klausurenkurs zum Staatsexamen (SS 2014): Lineare Algebra und analytische Geometrie 7
: Lineare Algebra und analytische Geometrie 7") Dr. Erwin Schörner Klausurenkurs zum Staatsexamen (SS 4): Lineare Algebra und analytische Geometrie 7 7. (Frühjahr, Thema 3, Aufgabe 4) Im R 3 seien die beiden Ebenen E : 6x+4y z = und E : +s +t 4 gegeben.
Dr. Erwin Schörner Klausurenkurs zum Staatsexamen (SS 4): Lineare Algebra und analytische Geometrie 7 7. (Frühjahr, Thema 3, Aufgabe 4) Im R 3 seien die beiden Ebenen E : 6x+4y z = und E : +s +t 4 gegeben.
Übungen zur. x 2y = 0.
 Übungen zur Geometrie WS 2015/16 Blatt 3 Prof. Fritzsche Lösung zu Afg. 9: Im R 2 kann man wahlweise mit Koordinaten rechnen oder die reine Vektorschreibweise verwenden. Möchte man die affine Struktur
Übungen zur Geometrie WS 2015/16 Blatt 3 Prof. Fritzsche Lösung zu Afg. 9: Im R 2 kann man wahlweise mit Koordinaten rechnen oder die reine Vektorschreibweise verwenden. Möchte man die affine Struktur
Institut für Mathematik Geometrie und Lineare Algebra J. Schönenberger-Deuel
 Lösungen Übung 6 Aufgabe 1. a.) Idee: Gesucht sind p, q mit pq = 6 2 und p + q = 13. Dies entspricht genau der Situation im Höhensatz. Konstruktion: 1. Punkte A, B mit AB = 13 2. Gerade g AB mit dist(g,
Lösungen Übung 6 Aufgabe 1. a.) Idee: Gesucht sind p, q mit pq = 6 2 und p + q = 13. Dies entspricht genau der Situation im Höhensatz. Konstruktion: 1. Punkte A, B mit AB = 13 2. Gerade g AB mit dist(g,
Die umgekehrte Richtung
 Die umgekehrte Richtung Satz 95 Sei n N, n 2. Dann gilt: b n 1 1 mod n für alle b Z n \ {0} = n ist prim. Beweis: [durch Widerspruch] Annahme: r n für ein r N, r > 1. Dann also r n 1 1 (r mod n) n 1 1
Die umgekehrte Richtung Satz 95 Sei n N, n 2. Dann gilt: b n 1 1 mod n für alle b Z n \ {0} = n ist prim. Beweis: [durch Widerspruch] Annahme: r n für ein r N, r > 1. Dann also r n 1 1 (r mod n) n 1 1
Lineare Algebra I. Auswahlaxiom befragen. (Wer schon im Internet danach sucht, sollte das auch mal mit dem Begriff
 Universität Konstanz Wintersemester 2009/2010 Fachbereich Mathematik und Statistik Lösungsblatt 2 Prof. Dr. Markus Schweighofer 11.11.2009 Aaron Kunert / Sven Wagner Lineare Algebra I Lösung 2.1: Behauptung:
Universität Konstanz Wintersemester 2009/2010 Fachbereich Mathematik und Statistik Lösungsblatt 2 Prof. Dr. Markus Schweighofer 11.11.2009 Aaron Kunert / Sven Wagner Lineare Algebra I Lösung 2.1: Behauptung:
Satz 94 Sei b N 0 und p N eine Primzahl. Dann gilt:
 5.6 Satz von Fermat Satz 94 Sei b N 0 und p N eine Primzahl. Dann gilt: b p b mod p, (falls b 0 mod p : b p 1 1 mod p) (gemeint ist: die Gleichung b p = b gilt modulo p) Diskrete Strukturen 5.6 Satz von
5.6 Satz von Fermat Satz 94 Sei b N 0 und p N eine Primzahl. Dann gilt: b p b mod p, (falls b 0 mod p : b p 1 1 mod p) (gemeint ist: die Gleichung b p = b gilt modulo p) Diskrete Strukturen 5.6 Satz von
Modulprüfung BA 04 Mathematik: Grundlagen der Mathematik C: Geometrie, Elementare Algebra und Zahlentheorie
 FB 3: Mathematik/Naturwissenschaften Prof. Dr. R. Frank/ Dr. D. Habeck Modulprüfung BA 04 Mathematik: Grundlagen der Mathematik C: Geometrie, Elementare Algebra und Zahlentheorie 11.02.2015 Name: Vorname:
FB 3: Mathematik/Naturwissenschaften Prof. Dr. R. Frank/ Dr. D. Habeck Modulprüfung BA 04 Mathematik: Grundlagen der Mathematik C: Geometrie, Elementare Algebra und Zahlentheorie 11.02.2015 Name: Vorname:
D-MATH Tommaso Goldhirsch. Serie 2. Man bezeichnet dies als Assoziativität der Verknüpfung von Abbildungen.
 Serie 2 Aufgabe 1 Es seien ψ 1, ψ 2 und ψ Abbildungen von einer Menge E auf sich selbst. Zeigen Sie, dass die Assoziativität gilt: (ψ 1 ψ 2 ) ψ = ψ 1 (ψ 2 ψ ). Wir zeigen, dass die Abbildungen (ψ 1 ψ 2
Serie 2 Aufgabe 1 Es seien ψ 1, ψ 2 und ψ Abbildungen von einer Menge E auf sich selbst. Zeigen Sie, dass die Assoziativität gilt: (ψ 1 ψ 2 ) ψ = ψ 1 (ψ 2 ψ ). Wir zeigen, dass die Abbildungen (ψ 1 ψ 2
Licht wählt unter allen möglichen Wegen den kürzesten (im Allgemeinen: den schnellsten) Was ist der kürzeste Weg von P über S nach A?
 Was ist der kürzeste Weg von P über S nach A?") Kapitel 2: Kongruenzabbildungen 2.1 Geradenspiegelungen a) Spiegel Wie wirkt ein Spiegel? Modellvorstellung: Jeder beleuchtete Punkt P sendet nach allen Seiten Lichtstrahlen aus Wie verlaufen die Lichtstrahlen
Kapitel 2: Kongruenzabbildungen 2.1 Geradenspiegelungen a) Spiegel Wie wirkt ein Spiegel? Modellvorstellung: Jeder beleuchtete Punkt P sendet nach allen Seiten Lichtstrahlen aus Wie verlaufen die Lichtstrahlen
Universität Bielefeld. Elementare Geometrie. Sommersemester Grundlagen. Fixpunkte und Kreisschnittpunkte. Stefan Witzel
 Universität Bielefeld Elementare Geometrie Sommersemester 2018 Grundlagen Fixpunkte und Kreisschnittpunkte Stefan Witzel Wie schreib ich s auf? (Version 1) Aufgabe. Gegeben ein Segment PQ, konstruiere
Universität Bielefeld Elementare Geometrie Sommersemester 2018 Grundlagen Fixpunkte und Kreisschnittpunkte Stefan Witzel Wie schreib ich s auf? (Version 1) Aufgabe. Gegeben ein Segment PQ, konstruiere
Erste Schnittpunktsätze und Anfänge einer Dreiecksgeometrie
 Christoph Vogelsang Matr.Nr. 66547 Nils Martin Stahl Matr.Nr. 664 Seminar: Geometrie Dozent: Epkenhans Wintersemester 005/006 Erste Schnittpunktsätze und Anfänge einer Dreiecksgeometrie Ausarbeitung der
Christoph Vogelsang Matr.Nr. 66547 Nils Martin Stahl Matr.Nr. 664 Seminar: Geometrie Dozent: Epkenhans Wintersemester 005/006 Erste Schnittpunktsätze und Anfänge einer Dreiecksgeometrie Ausarbeitung der
3. Für beliebiges A bezeichnet man die Menge A A manchmal auch mit A 2 (in Worten:
 35 4 Paarungen 4. Produktmengen Die Mengen {x, y} und {y, x} sind gleich, weil sie die gleichen Elemente enthalten. Manchmal legt man aber zusätzlich Wert auf die Reihenfolge der Elemente. Die Objekte
35 4 Paarungen 4. Produktmengen Die Mengen {x, y} und {y, x} sind gleich, weil sie die gleichen Elemente enthalten. Manchmal legt man aber zusätzlich Wert auf die Reihenfolge der Elemente. Die Objekte
WS 2003/04. Diskrete Strukturen I
 WS 2003/04 Ernst W. Mayr mayr@in.tum.de Institut für Informatik Technische Universität München 11-07-2004 Satz Sei b N 0 und p N eine Primzahl. Dann gilt: b p b mod p, (falls b 0 : b p 1 1 mod p) (gemeint
WS 2003/04 Ernst W. Mayr mayr@in.tum.de Institut für Informatik Technische Universität München 11-07-2004 Satz Sei b N 0 und p N eine Primzahl. Dann gilt: b p b mod p, (falls b 0 : b p 1 1 mod p) (gemeint
Plan für Heute/Morgen
 Plan für Heute/Morgen Kongruenzsätze: aus der Schule wissen wir die SSS, SWS, und SSW Kongruenzsätze für Dreiecke: Wir wollen diese Sätze im Rahmen unseres Modells (wenn Punkte die 2 Tupel von reellen
Plan für Heute/Morgen Kongruenzsätze: aus der Schule wissen wir die SSS, SWS, und SSW Kongruenzsätze für Dreiecke: Wir wollen diese Sätze im Rahmen unseres Modells (wenn Punkte die 2 Tupel von reellen
1 Analytische Geometrie und Grundlagen
 $Id: vektor.tex,v 1.8 017/04/4 15:51:58 hk Exp $ 1 Analytische Geometrie und Grundlagen 1.3 Sätze über Geraden in der Ebene In der letzten Sitzung hatten wir die Sätze von Ceva und Menelaos bewiesen. Wir
$Id: vektor.tex,v 1.8 017/04/4 15:51:58 hk Exp $ 1 Analytische Geometrie und Grundlagen 1.3 Sätze über Geraden in der Ebene In der letzten Sitzung hatten wir die Sätze von Ceva und Menelaos bewiesen. Wir
Ebene Elementargeometrie
 Ebene Elementargeometrie Im Folgenden unterscheiden wir neben Definitionen (Namensgebung) und Sätzen (nachweisbaren Aussagen) so genannte Axiome. Axiome stellen der Anschauung entnommene Aussagen dar,
Ebene Elementargeometrie Im Folgenden unterscheiden wir neben Definitionen (Namensgebung) und Sätzen (nachweisbaren Aussagen) so genannte Axiome. Axiome stellen der Anschauung entnommene Aussagen dar,
Modulprüfung BA 04 Mathematik: Grundlagen der Mathematik C: Geometrie, Elementare Algebra und Zahlentheorie LÖSUNGSHINWEISE
 FB 3: Mathematik/Naturwissenschaften Prof. Dr. P. Ullrich/ Dr. D. Habeck Modulprüfung BA 04 Mathematik: Grundlagen der Mathematik C: Geometrie, Elementare Algebra und Zahlentheorie 06.04.2016 Name: Vorname:
FB 3: Mathematik/Naturwissenschaften Prof. Dr. P. Ullrich/ Dr. D. Habeck Modulprüfung BA 04 Mathematik: Grundlagen der Mathematik C: Geometrie, Elementare Algebra und Zahlentheorie 06.04.2016 Name: Vorname:
Vorlesung Sommer 2007 Elementare Geometrie
 Vorlesung Sommer 2007 Elementare Geometrie 1 Isometrien der Ebene Aus der Anschauung kennen wir den Begriff der Bewegung einer Ebene E. Wir zählen die wichtigen Eigenschaften von Bewegungen auf. Eine Bewegung
Vorlesung Sommer 2007 Elementare Geometrie 1 Isometrien der Ebene Aus der Anschauung kennen wir den Begriff der Bewegung einer Ebene E. Wir zählen die wichtigen Eigenschaften von Bewegungen auf. Eine Bewegung
Übungen zur Vorlesung Elementare Geometrie
 Westfälische Wilhelms-Universität Münster Mathematisches Institut al. Prof. Dr. Lutz Hille Dr. Karin Haluczok Übungen zur Vorlesung Elementare Geometrie Sommersemester 00 Musterlösung zu Blatt 3 vom 6.
Westfälische Wilhelms-Universität Münster Mathematisches Institut al. Prof. Dr. Lutz Hille Dr. Karin Haluczok Übungen zur Vorlesung Elementare Geometrie Sommersemester 00 Musterlösung zu Blatt 3 vom 6.
Geometrische Abbildungen der Ebene
 Geometrische Abbildungen der Ebene Dr. Elke Warmuth Sommersemester 2018 1 / 29 Bezeichnungen Kongruenzabbildungen Spiegelungen Klassifikation aller Kongruenzabbildungen 2 / 29 Abbildung, Funktion, Transformation
Geometrische Abbildungen der Ebene Dr. Elke Warmuth Sommersemester 2018 1 / 29 Bezeichnungen Kongruenzabbildungen Spiegelungen Klassifikation aller Kongruenzabbildungen 2 / 29 Abbildung, Funktion, Transformation
PH Heidelberg, Fach Mathematik Klausur zur Akademischen Teilpru fung, Modul 2. Einfu hrung in die Geometrie
 PH Heidelberg, Fach Mathematik Klausur zur Akademischen Teilpru fung, Modul Einfu hrung in die Geometrie Abbildung 01 Abbildung 0 Wintersemester 011/1 10. Februar 01 Abbildung 0 Klausur zur ATP, Modul,
PH Heidelberg, Fach Mathematik Klausur zur Akademischen Teilpru fung, Modul Einfu hrung in die Geometrie Abbildung 01 Abbildung 0 Wintersemester 011/1 10. Februar 01 Abbildung 0 Klausur zur ATP, Modul,
A c. C a. C b. P A b. A B c. B a. Über Parallelen zu Dreiecksseiten Darij Grinberg
 Über Parallelen zu Dreiecksseiten Darij Grinberg c a b P b c Fig. 1 Wir werden zuerst zeigen (Fig. 1): Satz 1: Sei P ein Punkt in der Ebene eines Dreiecks : Die Parallele zu der Geraden durch den Punkt
Über Parallelen zu Dreiecksseiten Darij Grinberg c a b P b c Fig. 1 Wir werden zuerst zeigen (Fig. 1): Satz 1: Sei P ein Punkt in der Ebene eines Dreiecks : Die Parallele zu der Geraden durch den Punkt
D-MATH Tommaso Goldhirsch. Serie 3
 Serie 3 Aufgabe 1 Sei G eine Gruppe und X eine Teilmenge von G. Die von X erzeugte Untergruppe von G ist die kleinste Untergruppe von G die X enthält. (Dass es eindeutig eine "kleinste" gibt wird in der
Serie 3 Aufgabe 1 Sei G eine Gruppe und X eine Teilmenge von G. Die von X erzeugte Untergruppe von G ist die kleinste Untergruppe von G die X enthält. (Dass es eindeutig eine "kleinste" gibt wird in der
Bewegungen: Parameter
 Universität Bielefeld Elementare Geometrie Sommersemester 2018 Bewegungen: Parameter Stefan Witzel Parameter Ziel: gegeben eine Bewegung ϕ, beschreibe Parameter, die ϕ eindeutig beschreiben. Diese werden
Universität Bielefeld Elementare Geometrie Sommersemester 2018 Bewegungen: Parameter Stefan Witzel Parameter Ziel: gegeben eine Bewegung ϕ, beschreibe Parameter, die ϕ eindeutig beschreiben. Diese werden
sign: R R, sign(x) := 0 falls x = 0 1 falls x < 0 Diese ist im Punkt x 0 = 0 nicht stetig, denn etwa zu ε = 1 finden wir kein δ > 0
 := 0 falls x = 0 1 falls x < 0 Diese ist im Punkt x 0 = 0 nicht stetig, denn etwa zu ε = 1 finden wir kein δ > 0") ANALYSIS FÜR PHYSIK UND VERWANDTE FÄCHER I 81 3. Stetigkeit 3.1. Stetigkeit. Im Folgenden sei D R eine beliebige nichtleere Teilmenge. Typischerweise wird D ein allgemeines Intervall sein, siehe Abschnitt
ANALYSIS FÜR PHYSIK UND VERWANDTE FÄCHER I 81 3. Stetigkeit 3.1. Stetigkeit. Im Folgenden sei D R eine beliebige nichtleere Teilmenge. Typischerweise wird D ein allgemeines Intervall sein, siehe Abschnitt
Injektiv, Surjektiv, Bijektiv
 Injektiv, Surjektiv, Bijektiv Aufgabe 1. Geben Sie einen ausführlichen Beweis für folgende Aussage: Wenn f A B surjektiv ist und R A A A eine reflexive Relation auf A ist, dann ist R B = {( f(x), f(y)
Injektiv, Surjektiv, Bijektiv Aufgabe 1. Geben Sie einen ausführlichen Beweis für folgende Aussage: Wenn f A B surjektiv ist und R A A A eine reflexive Relation auf A ist, dann ist R B = {( f(x), f(y)
Lineare Algebra II. Prof. Dr. M. Rost. Übungen Blatt 9 (SS 2011) Abgabetermin: Donnerstag, 16. Juni.
 Abgabetermin: Donnerstag, 16. Juni.") Lineare Algebra II Prof. Dr. M. Rost Übungen Blatt 9 (SS 2011) Abgabetermin: Donnerstag, 16. Juni http://www.math.uni-bielefeld.de/~rost/la2 Erinnerungen, Ergänzungen und Vorgriffe zur Vorlesung: Affine
Lineare Algebra II Prof. Dr. M. Rost Übungen Blatt 9 (SS 2011) Abgabetermin: Donnerstag, 16. Juni http://www.math.uni-bielefeld.de/~rost/la2 Erinnerungen, Ergänzungen und Vorgriffe zur Vorlesung: Affine
Seminararbeit. Orthogonale Gruppen. Marvin K. Neugebauer. 15. Juli 2010
 Seminararbeit Orthogonale Gruppen Marvin K Neugebauer 15 Juli 2010 Prof Dr Schwachhöfer Lehrstuhl für Differentialgeometrie Proseminar Lineare Algebra SS 2010 Dank an Rafael Kawka für die Hilfe bei der
Seminararbeit Orthogonale Gruppen Marvin K Neugebauer 15 Juli 2010 Prof Dr Schwachhöfer Lehrstuhl für Differentialgeometrie Proseminar Lineare Algebra SS 2010 Dank an Rafael Kawka für die Hilfe bei der
8 Kreisgeometrie in der Zeichenebene
 8 Kreisgeometrie in der Zeichenebene 8.1 Inversion am Kreis 8.1.1 Definition Ein Kreis k ist die Menge aller Punkte, die von einem festen Punkt M, dem Mittelpunkt des Kreises, festen Abstand r haben. Dabei
8 Kreisgeometrie in der Zeichenebene 8.1 Inversion am Kreis 8.1.1 Definition Ein Kreis k ist die Menge aller Punkte, die von einem festen Punkt M, dem Mittelpunkt des Kreises, festen Abstand r haben. Dabei
MAA = MAB + B AA = B CA + CAA BA A Nun sehen wir mit Proposition 10.7 aus dem Skript, dass A M AB gelten muss.
 1. Konvexität in der absoluten Ebene In einem Dreieck in der Euklidischen Ebene hat die Strecke zwischen zwei Seitenmittelpunkten die halbe Länge der dritten Seite. In der absoluten Ebene hat man eine
1. Konvexität in der absoluten Ebene In einem Dreieck in der Euklidischen Ebene hat die Strecke zwischen zwei Seitenmittelpunkten die halbe Länge der dritten Seite. In der absoluten Ebene hat man eine
Lineare Algebra I (WS 13/14)
") Lineare Algebra I (WS 13/14) Alexander Lytchak Nach einer Vorlage von Bernhard Hanke 06.12.2013 Alexander Lytchak 1 / 16 Wiederholung Ist V ein Vektorraum, so heißen Abbildungen T v : V V der Form w w
Lineare Algebra I (WS 13/14) Alexander Lytchak Nach einer Vorlage von Bernhard Hanke 06.12.2013 Alexander Lytchak 1 / 16 Wiederholung Ist V ein Vektorraum, so heißen Abbildungen T v : V V der Form w w
1 Analytische Geometrie und Grundlagen
 $Id: vektor.tex,v 1.24 2017/05/18 11:18:04 hk Exp $ 1 Analytische Geometrie und Grundlagen 1.6 Bewegungen und Kongruenzbegriffe In diesem Abschnitt wollen wir die Automorphismengruppe der euklidischen
$Id: vektor.tex,v 1.24 2017/05/18 11:18:04 hk Exp $ 1 Analytische Geometrie und Grundlagen 1.6 Bewegungen und Kongruenzbegriffe In diesem Abschnitt wollen wir die Automorphismengruppe der euklidischen
Universität Bielefeld. Elementare Geometrie. Sommersemester Gruppen, Bewegungen. Stefan Witzel
 Universität Bielefeld Elementare Geometrie Sommersemester 2018 Gruppen, Bewegungen Stefan Witzel Gruppen Eine Menge G von Bijektionen X X ist eine Gruppe, wenn 1. die Identität id: X X in G liegt, 2. für
Universität Bielefeld Elementare Geometrie Sommersemester 2018 Gruppen, Bewegungen Stefan Witzel Gruppen Eine Menge G von Bijektionen X X ist eine Gruppe, wenn 1. die Identität id: X X in G liegt, 2. für
Wiederholungsblatt Elementargeometrie LÖSUNGSSKIZZE
 Wiederholungsblatt Elementargeometrie im SS 01 bei Prof. Dr. S. Goette LÖSUNGSSKIZZE Die Lösungen unten enthalten teilweise keine vollständigen Rechnungen. Es sind aber alle wichtigen Zwischenergebnisse
Wiederholungsblatt Elementargeometrie im SS 01 bei Prof. Dr. S. Goette LÖSUNGSSKIZZE Die Lösungen unten enthalten teilweise keine vollständigen Rechnungen. Es sind aber alle wichtigen Zwischenergebnisse
f 1 (U) = i I V i (1) f Vi : V i U Eine Überlagerung ist ein lokaler Homöomorphismus. {s S f(s) = g(s)} (2)
 = i I V i (1) f Vi : V i U Eine Überlagerung ist ein lokaler Homöomorphismus. {s S f(s) = g(s)} (2)") Liftung von Kurven Def inition 0.1 Eine stetige Abbildung f : Y X topologischer Räume heißt ein lokaler Homöomorphismus, wenn jeder Punkt y Y eine offene Umgebung V beseitzt, so dass die Einschränkung
Liftung von Kurven Def inition 0.1 Eine stetige Abbildung f : Y X topologischer Räume heißt ein lokaler Homöomorphismus, wenn jeder Punkt y Y eine offene Umgebung V beseitzt, so dass die Einschränkung
Klausur zur Vorlesung Elementargeometrie
 Klausur zur Vorlesung Elementargeometrie 08.08.2012 Prof. Klaus Mohnke und Mitarbeiter Nachname, Vorname: Matrikelnummer: Bitte unterschreiben Sie hier bei der Abgabe: Zum Bearbeiten der Klausur haben
Klausur zur Vorlesung Elementargeometrie 08.08.2012 Prof. Klaus Mohnke und Mitarbeiter Nachname, Vorname: Matrikelnummer: Bitte unterschreiben Sie hier bei der Abgabe: Zum Bearbeiten der Klausur haben
Universität Bielefeld. Elementare Geometrie. Sommersemester Gruppen, Bewegungen. Stefan Witzel
 Universität Bielefeld Elementare Geometrie Sommersemester 2018 Gruppen, Bewegungen Stefan Witzel Gruppen Eine Menge G von Bijektionen X X ist eine Gruppe, wenn 1. die Identität id: X X in G liegt, 2. für
Universität Bielefeld Elementare Geometrie Sommersemester 2018 Gruppen, Bewegungen Stefan Witzel Gruppen Eine Menge G von Bijektionen X X ist eine Gruppe, wenn 1. die Identität id: X X in G liegt, 2. für
Zur Deckung bringen präzisiert werden. Ich stelle zunächst Hilberts Version vor, wähle aber anschließend einen anderen, etwas anschaulicheren Weg.
 30 Jetzt soll der Begriff der Kongruenz bzw. Euklids vage Vorstellung vom Zur Deckung bringen präzisiert werden. Ich stelle zunächst Hilberts Version vor, wähle aber anschließend einen anderen, etwas anschaulicheren
30 Jetzt soll der Begriff der Kongruenz bzw. Euklids vage Vorstellung vom Zur Deckung bringen präzisiert werden. Ich stelle zunächst Hilberts Version vor, wähle aber anschließend einen anderen, etwas anschaulicheren
Mathematisches Argumentieren und Beweisen Beweisarten Besipiele. Hagen Knaf, WS 2014/15
 Mathematisches Argumentieren und Beweisen Beweisarten Besipiele Hagen Knaf, WS 2014/15 Im Folgenden sind einige der in der Vorlesung besprochenen Beispielbeweise für die verschiedenen Beweisarten aufgeführt
Mathematisches Argumentieren und Beweisen Beweisarten Besipiele Hagen Knaf, WS 2014/15 Im Folgenden sind einige der in der Vorlesung besprochenen Beispielbeweise für die verschiedenen Beweisarten aufgeführt
Modulprüfung BA 04 Mathematik: Grundlagen der Mathematik C: Geometrie, Elementare Algebra und Zahlentheorie
 FB 3: Mathematik/Naturwissenschaften Prof. Dr. R. Frank/ Dr. D. Habeck Modulprüfung BA 04 Mathematik: Grundlagen der Mathematik C: Geometrie, Elementare Algebra und Zahlentheorie 09.04.2015 Name: Vorname:
FB 3: Mathematik/Naturwissenschaften Prof. Dr. R. Frank/ Dr. D. Habeck Modulprüfung BA 04 Mathematik: Grundlagen der Mathematik C: Geometrie, Elementare Algebra und Zahlentheorie 09.04.2015 Name: Vorname:
Universität Bielefeld. Elementare Geometrie. Sommersemester Gruppen, Bewegungen. Stefan Witzel
 Universität Bielefeld Elementare Geometrie Sommersemester 2018 Gruppen, Bewegungen Stefan Witzel Drehungen und Verschiebungen vertauschen nicht Proposition. Wenn τ id eine Verschiebung ist und ρ eine Drehung,
Universität Bielefeld Elementare Geometrie Sommersemester 2018 Gruppen, Bewegungen Stefan Witzel Drehungen und Verschiebungen vertauschen nicht Proposition. Wenn τ id eine Verschiebung ist und ρ eine Drehung,
Elemente der Mathematik - Winter 2016/2017
 4 Elemente der Mathematik - Winter 2016/2017 Prof. Dr. Peter Koepke, Regula Krapf Lösungen Übungsblatt 7 Aufgabe 29 (8 Punkte). Für eine Menge M ist die Potenzmenge von M definiert als P(M) := {X X M},
4 Elemente der Mathematik - Winter 2016/2017 Prof. Dr. Peter Koepke, Regula Krapf Lösungen Übungsblatt 7 Aufgabe 29 (8 Punkte). Für eine Menge M ist die Potenzmenge von M definiert als P(M) := {X X M},
Modulprüfung zum Lehrerweiterbildungskurs Geometrie am
 Modulprüfung zum Lehrerweiterbildungskurs Geometrie am 28.6.17 Name, Vorname Matrikel-Nr. Aufg.1 Aufg.2 Aufg.3 Aufg.4 Σ Note bzw. Kennzeichen Punkte Bearbeiten Sie bitte drei der vier folgenden Aufgaben!
Modulprüfung zum Lehrerweiterbildungskurs Geometrie am 28.6.17 Name, Vorname Matrikel-Nr. Aufg.1 Aufg.2 Aufg.3 Aufg.4 Σ Note bzw. Kennzeichen Punkte Bearbeiten Sie bitte drei der vier folgenden Aufgaben!
Alternative Lösung. Analysis I (WS 08/09) Denk/Rheinländer Gruppe 1 (Sylvia Lange) Universität Konstanz FB Mathematik & Statistik.
 Denk/Rheinländer Gruppe 1 (Sylvia Lange) Universität Konstanz FB Mathematik & Statistik.") Gruppe 1 (Sylvia Lange) Alternative Lösung zur Aufgabe 2 Aufgabe: Seien X, X Mengen und f : X X ein Abbildung. Beweisen Sie, dass folgende Aussagen äquivalent sind: a) f injektiv b) f(a B) = f(a) f(b)
Gruppe 1 (Sylvia Lange) Alternative Lösung zur Aufgabe 2 Aufgabe: Seien X, X Mengen und f : X X ein Abbildung. Beweisen Sie, dass folgende Aussagen äquivalent sind: a) f injektiv b) f(a B) = f(a) f(b)
Vorlesung Sommer 2009 Elementare Geometrie
 1 Grundlagen Vorlesung Sommer 2009 Elementare Geometrie Längen und Winkel Es seien A und B zwei Punkte in der Ebene oder im Raum. Wir bezeichnen mit AB den Abstand der Punkte. Wir legen uns auf keine Maßeinheit
1 Grundlagen Vorlesung Sommer 2009 Elementare Geometrie Längen und Winkel Es seien A und B zwei Punkte in der Ebene oder im Raum. Wir bezeichnen mit AB den Abstand der Punkte. Wir legen uns auf keine Maßeinheit
f(x 0 ) = lim f(b k ) 0 0 ) = 0
 = lim f(b k ) 0 0 ) = 0") 5.10 Zwischenwertsatz. Es sei [a, b] ein Intervall, a < b und f : [a, b] R stetig. Ist f(a) < 0 und f(b) > 0, so existiert ein x 0 ]a, b[ mit f(x 0 ) = 0. Wichtig: Intervall, reellwertig, stetig Beweis.
5.10 Zwischenwertsatz. Es sei [a, b] ein Intervall, a < b und f : [a, b] R stetig. Ist f(a) < 0 und f(b) > 0, so existiert ein x 0 ]a, b[ mit f(x 0 ) = 0. Wichtig: Intervall, reellwertig, stetig Beweis.
Beispiellösungen zu Blatt 96
 µathematischer κorrespondenz- zirkel Mathematisches Institut Georg-August-Universität Göttingen Aufgabe 1 Beispiellösungen zu Blatt 96 Gegeben sei ein Oktaeder. Auf dessen Kanten suchen wir Wege von einer
µathematischer κorrespondenz- zirkel Mathematisches Institut Georg-August-Universität Göttingen Aufgabe 1 Beispiellösungen zu Blatt 96 Gegeben sei ein Oktaeder. Auf dessen Kanten suchen wir Wege von einer
Musterlösung 7 Lineare Algebra für die Naturwissenschaften
 Musterlösung 7 Lineare Algebra für die Naturwissenschaften Aufgabe Entscheiden Sie, ob folgende Abbildungen linear sind, und geben sie für die linearen Abbildungen eine Matrixdarstellung (in einer Basis
Musterlösung 7 Lineare Algebra für die Naturwissenschaften Aufgabe Entscheiden Sie, ob folgende Abbildungen linear sind, und geben sie für die linearen Abbildungen eine Matrixdarstellung (in einer Basis
Kontrollfragen und Aufgaben zur 4. Konsultation
 1 Technische Universität Ilmenau Fakultät für Mathematik und Naturwissenschaften Institut für Mathematik Dr. Jens Schreyer und Prof. Dr. Michael Stiebitz Kontrollfragen und Aufgaben zur 4. Konsultation
1 Technische Universität Ilmenau Fakultät für Mathematik und Naturwissenschaften Institut für Mathematik Dr. Jens Schreyer und Prof. Dr. Michael Stiebitz Kontrollfragen und Aufgaben zur 4. Konsultation
Lineare Algebra I (WS 13/14)
") Lineare Algebra I (WS 13/14) Alexander Lytchak Nach einer Vorlage von Bernhard Hanke 10.12.2013 Alexander Lytchak 1 / 15 Motivation Für das Verständis affiner Teilräume eines Vektorraums sind Translationen
Lineare Algebra I (WS 13/14) Alexander Lytchak Nach einer Vorlage von Bernhard Hanke 10.12.2013 Alexander Lytchak 1 / 15 Motivation Für das Verständis affiner Teilräume eines Vektorraums sind Translationen
Einführung in die Algebra
 Prof. Dr. H. Brenner Osnabrück SS 2009 Einführung in die Algebra Vorlesung 4 Das Lemma von Bezout Satz 1. (Lemma von Bézout) Jede Menge von ganzen Zahlen a 1,...,a n besitzt einen größten gemeinsamen Teiler
Prof. Dr. H. Brenner Osnabrück SS 2009 Einführung in die Algebra Vorlesung 4 Das Lemma von Bezout Satz 1. (Lemma von Bézout) Jede Menge von ganzen Zahlen a 1,...,a n besitzt einen größten gemeinsamen Teiler
4.4 Umkehrfunktion 77. Sei o.b.d.a. f(a) > 0 und f(b) < 0, setzen M = {y [a, b] mit f(x) > 0 für alle x [a, y]}
![4.4 Umkehrfunktion 77. Sei o.b.d.a. f(a) > 0 und f(b) < 0, setzen M = {y [a, b] mit f(x) > 0 für alle x [a, y]}](/thumbs/73/68945497.jpg "4.4 Umkehrfunktion 77. Sei o.b.d.a. f(a) > 0 und f(b) < 0, setzen M = {y [a, b] mit f(x) > 0 für alle x [a, y]}") . Umkehrfunktion 77 B e w e i s : Sei o.b.d.a. fa) > und fb) für alle [a, y] M a M), M beschränkt y b) Aiom V ξ [a, b] : ξ sup M fa) f) n.z.z. : i) fξ) ii) ξ a, b) zu i):
. Umkehrfunktion 77 B e w e i s : Sei o.b.d.a. fa) > und fb) für alle [a, y] M a M), M beschränkt y b) Aiom V ξ [a, b] : ξ sup M fa) f) n.z.z. : i) fξ) ii) ξ a, b) zu i):
Weitere geometrische Abbildungen
 Weitere geometrische Abbildungen Anna Wegener, Matthias Wegen, Daniel Kretschmer 15.01.2015 1 / 38 Affinitätsabbildungen - Motivation Kongruenzabbildungen Ähnlichkeitsabbildungen Affinitätsabbildungen
Weitere geometrische Abbildungen Anna Wegener, Matthias Wegen, Daniel Kretschmer 15.01.2015 1 / 38 Affinitätsabbildungen - Motivation Kongruenzabbildungen Ähnlichkeitsabbildungen Affinitätsabbildungen
Übersicht zur Vorlesung
 Stand: 19.1.2012 Übersicht zur Vorlesung Ausgewählte Kapitel der Geometrie Definitionen/Axiome Anordnungsaxiome Archimedisches Axiom Definition von größer in den reellen Zahlen Intervalle Punkte, Geraden
Stand: 19.1.2012 Übersicht zur Vorlesung Ausgewählte Kapitel der Geometrie Definitionen/Axiome Anordnungsaxiome Archimedisches Axiom Definition von größer in den reellen Zahlen Intervalle Punkte, Geraden