Special Week 1617 Zeichenmaschinen. (Gelenkarm-) Roboter. Tags
|
|
|
- Ralf Schulze
- vor 6 Jahren
- Abrufe
Transkript




1 Special Week 1617 Zeichenmaschinen (Gelenkarm-) Roboter Tags 1








2 Tags: Linien, keine Flächen Tags: Blockschrift mit Schatten 2

 wurde von Josef und Karel Čapek Anfang des 20.")

3 L u f t Düse Airbrush Roboter was ist das? Antike 19. Jhrdt.: Roboter als menschenähnliches Geschöpf: Golem (400 v. Chr.) Prometheus (Goethe, 1774) Frankenstein (1818) Quelle: Definition 20. Jahrhundert: Der Begriff Roboter (tschechisch: robot) wurde von Josef und Karel Čapek Anfang des 20. Jahrhunderts durch die Science-Fiction-Literatur geprägt. Sein Ursprung liegt im slawischen Wort robot, welches mit Arbeit, Fronarbeit oder Zwangsarbeit übersetzt werden kann beschrieb Karel Čapek in seinem Theaterstück R.U.R. in Tanks gezüchtete menschenähnliche künstliche Arbeiter (Androiden). Quelle: 6 3

 programmierbar und gegebenenfalls sensorgeführt sind.")


4 Definition heute gemäß VDI-Richtlinie 2860: Industrieroboter sind universell einsetzbare Bewegungsautomaten mit mehreren Achsen, deren Bewegungen hinsichtlich Bewegungsfolge und Wegen bzw. Winkeln frei (d.h. ohne mechanischen Eingriff) programmierbar und gegebenenfalls sensorgeführt sind. Sie sind mit Greifern, Werkzeugen oder anderen Fertigungsmitteln ausrüstbar und können Handhabungsund/oder Fertigungsaufgaben ausführen. 7 Roboter im privaten Bereich Abnahme von Routinefunktionen oder zur Unterhaltung: Teppichreinigung Rasenmähen Überwachung / Sicherheit Kommunikation / Unterhaltung Zukunft: Pflege kranker und älterer Menschen autonomes und interaktives Spiel mit Kindern aufräumen, Tische decken/abräumen, den Müll rausbringen Quelle: 8 4








5 Bei Industrierobotern gibt es drei grundsätzliche Kinematiken: Linear-Roboter (auch Portal-Roboter genannt) sind Kinematiken mit meist drei linearen, häufig im Fahrweg anpassbaren, Achsen und bis zu 3 rotatorischen Achsen. Der Arbeitsbereich ist quaderförmig. Horizontal-Knickarm-Roboter (auch SCARA genannt) sind Kinematiken mit meist einer linearen und bis zu 5 rotatorischen Achsen. Der Arbeitsbereich ist scheibenförmig, wobei die Scheibe parallel zur Bodenflanschfläche des Roboters liegt. 9 Vertikal-Knickarmroboter häufig auch nur Knickarmroboter genannt, sind Kinematiken mit meist sechs rotatorischen Achsen. Der Arbeitsbereich ist kugelförmig Wandmontage Variable Einbaulage Deckenmontage Bodenmontage 10 mit Lineareinheit 5


6 Bestandteile eines Roboters Arm Hand Karussell Schwinge Grundgestell 11 Achsbezeichnung eines Knickarmroboters Achsen 1, 2 und 3 sind die Grundachsen. Achsen 4, 5 und 6 sind die Handachsen. 12 6
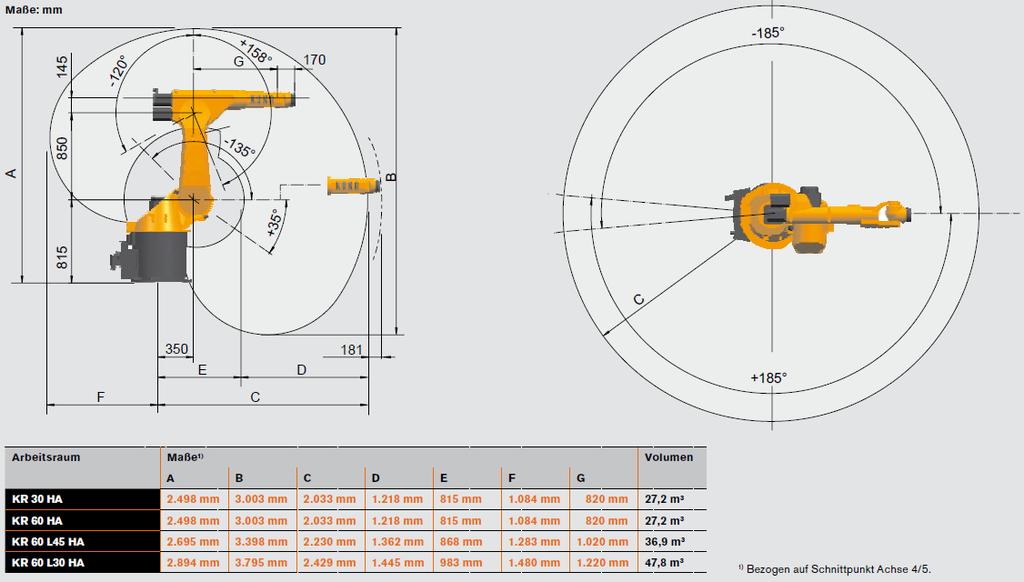
7 Koordinatensysteme 13 Arbeitsraum 7



 15")
8 Sicherheit Bedienerschutz: Gefahren für Leib und Leben Veränderungen, die die Sicherheit beeinträchtigen sofort melden Bei Arbeiten im Gefahrenbereich darf Roboter höchstens mit Handverfahrgeschwindigkeit bewegt werden Nach Möglichkeit nur eine Person im Gefahrenbereich Gefährdungen, die von Peripherie des Roboters (z.b. Greifer, Drehtisch) ausgehen, sind zu beachten Keine funktionsfähigen Sicherheitseinrichtungen demontieren (Warnhinweise eingeschlossen) 15 Bestandteile eines Robotersystems KUKA-Roboter (z.b. KR 60-3) KUKA-Control-Panel (KCP) Robotersteuerung (z.b. KR C2) 16 8
.")
9 Die inverse Kinematik (IK) oder Rückwärtstransformation. Sie ermöglicht bei einem Roboter die Bestimmung der Gelenkwinkel der Armelemente anhand der Position und Orientierung des Endeffektors (Tool Center Point, TCP). Sie spielt damit eine wichtige Rolle bei der Bewegung von Industrierobotern und bei der Computeranimation von Charakteren. Bei der IK wird das letzte Glied der kinematischen Kette bewegt. Die übrigen Glieder der Kette müssen dann entsprechend den Freiheitsgraden ihrer Gelenke passende Lagen einnehmen (Wikipedia). Dies wird von der Robotersoftware erledigt, wir liefern lediglich Punkte mit einer Richtungsangabe als Normale oder «Plane» (Arbeitsebene). Inverse Kinematik Programmierung Bewegungsarten (Interpolationsarten) eines Roboters MoveJ bzw. PTP (Punkt zu Punkt): Das Werkzeug wird entlang der schnellsten Bahn zu einem Zielpunkt gefahren. MoveL bzw. LIN (Linear): Werkzeugführung mit definierter Geschwindigkeit entlang der kürzes-ten Bahn (Geraden). MoveC bzw. CIRC (Zirkular): Werkzeugführung mit definierter Geschwindigkeit entlang einer Kreisbahn. P2 P2 P1 P1 P2 P1 18 9
10 Programmierung Bewegung Einzelachsgeschwindigkeit v P1 V max z.b. Achse 2: führende Achse z.b. Achse 3: angepaßt z.b. Achse 6: angepaßt P2 P1 Beschleunigung Konstant Abbremsen P2 Zeit t 19 Programmierung Bewegung MoveL-Bewegung (LIN) P2 ist ohne Überschleifen Genauhaltpunkt P2 P1 kürzeste Entfernung P

11 Programmierung Überschleifen Beim Überschleifen werden Positionen nicht genau angefahren und der Roboter wird nicht vollständig abgebremst. Vorteil: weniger Verschleiß bessere Zykluszeiten Z P1 P2 Y P3 X 21 KUKA KR60 HA Lasten Traglast Zusatzlast 60 kg 35 kg Arbeitsbereich Max. Reichweite 2033 mm Weitere Daten und Ausführungen Anzahl der Achsen 6 Wiederholgenauigkeit <±0,05 mm Gewicht 665 kg Einbaulage Boden Steuerung KR C4 11








12 Tools Tools 12








13 Schindeln anpassen, Robotersimulation + Biel ABB Roboter, Pastenauftragen + Biel 13






14 Styrocut / Biel 3Dweaving parametrisiertes Weben 14



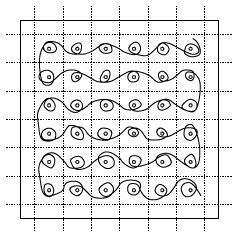
15 Fabtools ist eine Sammlung von *.ghuser Files. Bitte in folgenden Ordner kopieren: C:\Users\wij2\AppData\Roaming\Grasshopper\Us erobjects oder die Objekte aud die Canvas von Grasshopper ziehen. Bitte installieren: "KUKAprcNEWsetup_2016_05 _13.exe" durch Dblclick Durch Dblclick auf "kukaprclicense_bfh.reg" aktivieren Sie die Lizenz Installation von Fabtools und KukaPrc Robotag Geben Sie im mitgelieferten GH-File einen Tag-Text ein und varieren Sie ihn nach Belieben. Mit dieser Geometrie generieren Sie eine Robotersimulation. Geben Sie in den Settings des Kuka prc CORE einen Filenamen und einen Zielordner ein. Nach «Apply» wird der Code gespeichert. Dieses *.src File bringen Sie zum Roboter mit. Workflow 15
Roboter- und Automatisierungstechnik Teil 6: Robotik
 Roboter- und Automatisierungstechnik Teil 6: Robotik Hochschule Bremerhaven SS 2006/2007 Prof. Dr. Oliver Zielinski 6.1 Robotik: Einführung Robotertechnik Basiert auf dem Werk des tschechischen Schriftstellers
Roboter- und Automatisierungstechnik Teil 6: Robotik Hochschule Bremerhaven SS 2006/2007 Prof. Dr. Oliver Zielinski 6.1 Robotik: Einführung Robotertechnik Basiert auf dem Werk des tschechischen Schriftstellers
RS01 EINFÜHRUNG INDUSTRIEROBOTIK
 RS01 EINFÜHRUNG INDUSTRIEROBOTIK 1.1 Robotersysteme - Begriffsbestimmung 1.1.1 Definitionen 1921 Karel Čapek, robota (tschechisch) = arbeiten, Fronarbeit verrichten Robot (engl.) (nach Robot Institute
RS01 EINFÜHRUNG INDUSTRIEROBOTIK 1.1 Robotersysteme - Begriffsbestimmung 1.1.1 Definitionen 1921 Karel Čapek, robota (tschechisch) = arbeiten, Fronarbeit verrichten Robot (engl.) (nach Robot Institute
Geschichte. Zum ersten Einsatz eines Industrieroboter (Unimate) kam es dann im Jahr 1961 bei General Motors in einer Produktionslinie.
 kam es dann im Jahr 1961 bei General Motors in einer Produktionslinie.") Industrieroboter Geschichte Die ersten Industrieroboter waren in der Reaktortechnik zu suchen, wobei diese noch handgesteuert waren. Für den ersten wirklichen programmierbaren Industrieroboter der Welt
Industrieroboter Geschichte Die ersten Industrieroboter waren in der Reaktortechnik zu suchen, wobei diese noch handgesteuert waren. Für den ersten wirklichen programmierbaren Industrieroboter der Welt
Laborbericht: BPR-Labor. Datum: Dozentin: Prof. Dr. A. Weigl-Seitz
 1/10 vom 19.12.2005 Laborbericht: BPR-Labor Datum: 19.12.2005 Dozentin: Prof. Dr. A. Weigl-Seitz An der Ausarbeitung haben mitgewirkt: Manfred Ludwig (686916), Armin Vahidi (704734) und Bernd Schmitt (687151)
1/10 vom 19.12.2005 Laborbericht: BPR-Labor Datum: 19.12.2005 Dozentin: Prof. Dr. A. Weigl-Seitz An der Ausarbeitung haben mitgewirkt: Manfred Ludwig (686916), Armin Vahidi (704734) und Bernd Schmitt (687151)
RS01 EINFÜHRUNG INDUSTRIEROBOTIK
 RS01 EINFÜHRUNG INDUSTRIEROBOTIK 1.1 Robotersysteme - Begriffsbestimmung 1.1.1 Definitionen 1921 Karel Čapek, robota (tschechisch) = arbeiten, Fronarbeit verrichten Robot (engl.) (nach Robot Institute
RS01 EINFÜHRUNG INDUSTRIEROBOTIK 1.1 Robotersysteme - Begriffsbestimmung 1.1.1 Definitionen 1921 Karel Čapek, robota (tschechisch) = arbeiten, Fronarbeit verrichten Robot (engl.) (nach Robot Institute
Klausur Robotik/Steuerungstechnik
 Prof. Dr. K. Wüst SS 2009 Fachbereich MNI FH Gießen-Friedberg Klausur Robotik/Steuerungstechnik 9.7.2009 Nachname: Vorname: Matrikelnummer: Aufgabe Punkte erreicht 1 30 2 30 3 40 4 20 Summe 120 Mit Lösungen
Prof. Dr. K. Wüst SS 2009 Fachbereich MNI FH Gießen-Friedberg Klausur Robotik/Steuerungstechnik 9.7.2009 Nachname: Vorname: Matrikelnummer: Aufgabe Punkte erreicht 1 30 2 30 3 40 4 20 Summe 120 Mit Lösungen
Einführung in die Robotik. Jianwei Zhang
 - Jianwei Zhang zhang@informatik.uni-hamburg.de Fakultät für Mathematik, Informatik und Naturwissenschaften Technische Aspekte Multimodaler Systeme 19. April 2011 J. Zhang 63 Gliederung Allgemeine Informationen
- Jianwei Zhang zhang@informatik.uni-hamburg.de Fakultät für Mathematik, Informatik und Naturwissenschaften Technische Aspekte Multimodaler Systeme 19. April 2011 J. Zhang 63 Gliederung Allgemeine Informationen
Inverse Kinematik am Robotersimulationsprogramm
 Inverse Kinematik am Robotersimulationsprogramm EASY-ROB Problemstellung Kinematiken in EASY-ROB Vorwärtstransformation Inverse Transformation Numerisches Lösungsverfahren zur inversen Transformation Kombination
Inverse Kinematik am Robotersimulationsprogramm EASY-ROB Problemstellung Kinematiken in EASY-ROB Vorwärtstransformation Inverse Transformation Numerisches Lösungsverfahren zur inversen Transformation Kombination
Neue Konzepte und Innovationen
 Neue Konzepte und Innovationen Lehre Offener Geist Erfahrung 3 Was ist Innovation? Das Beispiel der Mitralklappe Die Mitralklappenchirurgie heute Klassischer Zugang Warum minimalinvasive Eingriffe Die
Neue Konzepte und Innovationen Lehre Offener Geist Erfahrung 3 Was ist Innovation? Das Beispiel der Mitralklappe Die Mitralklappenchirurgie heute Klassischer Zugang Warum minimalinvasive Eingriffe Die
1 EINFÜHRUNG Interdisziplinäre Wissenschaft Definition des Roboters... 16
 Inhaltsverzeichnis 1 EINFÜHRUNG... 15 1.1 Interdisziplinäre Wissenschaft... 15 1.2 Definition des Roboters... 16 2 GESCHICHTE DER ROBOTER... 18 2.1 Erste Ansätze... 18 2.2 Jahrhunderte danach... 19 2.3
Inhaltsverzeichnis 1 EINFÜHRUNG... 15 1.1 Interdisziplinäre Wissenschaft... 15 1.2 Definition des Roboters... 16 2 GESCHICHTE DER ROBOTER... 18 2.1 Erste Ansätze... 18 2.2 Jahrhunderte danach... 19 2.3
Ralf Dittmann, Technik für Raumfahrtsysteme DLR Raumfahrt-Agentur
 Raumfahrt-Robotik Ein Überblick Ralf Dittmann, Technik für Raumfahrtsysteme DLR Raumfahrt-Agentur Folie 1 Raumfahrt-Robotik Ein Überblick Raumfahrt-Robotik: was ist das? Raumfahrt-Robotik ist Realität;
Raumfahrt-Robotik Ein Überblick Ralf Dittmann, Technik für Raumfahrtsysteme DLR Raumfahrt-Agentur Folie 1 Raumfahrt-Robotik Ein Überblick Raumfahrt-Robotik: was ist das? Raumfahrt-Robotik ist Realität;
AW 1 - Vortrag. Simulationsmodell für visuell geführte Roboter. von Bernd Pohlmann. Betreuender: Prof. Dr. Andreas Meisel
 AW 1 - Vortrag Simulationsmodell für visuell geführte Roboter von Betreuender: Prof. Dr. Andreas Meisel Inhalt 1. Motivation 2. Ziel 3. Einführung Robotik 4. Kinematik 5. Denavit-Hartenberg 6. Kameramodell
AW 1 - Vortrag Simulationsmodell für visuell geführte Roboter von Betreuender: Prof. Dr. Andreas Meisel Inhalt 1. Motivation 2. Ziel 3. Einführung Robotik 4. Kinematik 5. Denavit-Hartenberg 6. Kameramodell
ABB ROBOTICS IRB Produktpräsentation
 ABB ROBOTICS Produktpräsentation Das beste Kleinroboter der Welt Wollten sie ihre robotergestützte Anlage schon immer 15% kleiner und 10% schneller machen? Mit dem von ABB ist genau das jetzt möglich!
ABB ROBOTICS Produktpräsentation Das beste Kleinroboter der Welt Wollten sie ihre robotergestützte Anlage schon immer 15% kleiner und 10% schneller machen? Mit dem von ABB ist genau das jetzt möglich!
Industrieroboter. Methoden der Steuerung und Regelung. Bearbeitet von Wolfgang Weber
 Industrieroboter Methoden der Steuerung und Regelung Bearbeitet von Wolfgang Weber 1. Auflage 2002. Taschenbuch. 220 S. Paperback ISBN 978 3 446 21604 4 Format (B x L): 16 x 22,8 cm Gewicht: 403 g Weitere
Industrieroboter Methoden der Steuerung und Regelung Bearbeitet von Wolfgang Weber 1. Auflage 2002. Taschenbuch. 220 S. Paperback ISBN 978 3 446 21604 4 Format (B x L): 16 x 22,8 cm Gewicht: 403 g Weitere
Innovation und Kompetenz rund um s Schweissen...
 Paul von der Bank GmbH Max-Volmer-Straße 23 40724 Hilden Innovation und Kompetenz rund um s Schweissen...... von der automatisierten Speicherfertigung bis hin zu schlüsselfertigen Roboterzellen - Ihre
Paul von der Bank GmbH Max-Volmer-Straße 23 40724 Hilden Innovation und Kompetenz rund um s Schweissen...... von der automatisierten Speicherfertigung bis hin zu schlüsselfertigen Roboterzellen - Ihre
ROBOTER TECHNIK EINFACH, GÜNSTIG UND FLEXIBEL AUTOMATISIEREN
 ROBOTER TECHNIK EINFACH, GÜNSTIG UND FLEXIBEL AUTOMATISIEREN EINFACH, GÜNSTIG UND FLEXIBEL AUTOMATISIEREN J+K ROBOTERTECHNIK Preiswerte und flexible Automatisierung für jedermann. Es ist mir eine große
ROBOTER TECHNIK EINFACH, GÜNSTIG UND FLEXIBEL AUTOMATISIEREN EINFACH, GÜNSTIG UND FLEXIBEL AUTOMATISIEREN J+K ROBOTERTECHNIK Preiswerte und flexible Automatisierung für jedermann. Es ist mir eine große
Invasion der Roboter
 Invasion der Roboter Zwischen Industrie und Kultur GPN11 25. Juni 2011 Lars Weiler Überblick Geschichte The Three Laws of Robotic Roboter als Diener Roboter in der Industrie Roboter
Invasion der Roboter Zwischen Industrie und Kultur GPN11 25. Juni 2011 Lars Weiler Überblick Geschichte The Three Laws of Robotic Roboter als Diener Roboter in der Industrie Roboter
Grundlagen der Robotik Klausur am Musterlösung Nachname: Vorname: Matrikelnummer:
 Prof. Dr. K. Wüst SS 202 Fachbereich MNI TH Mittelhessen Grundlagen der Robotik Klausur am 6.7.202 Musterlösung Nachname: Vorname: Matrikelnummer: Aufgabe Punkte erreicht 22 2 22 3 8 4 8 Bonusfrage 0 Summe
Prof. Dr. K. Wüst SS 202 Fachbereich MNI TH Mittelhessen Grundlagen der Robotik Klausur am 6.7.202 Musterlösung Nachname: Vorname: Matrikelnummer: Aufgabe Punkte erreicht 22 2 22 3 8 4 8 Bonusfrage 0 Summe
Einführung in die Robotik. Jianwei Zhang
 - Jianwei Zhang zhang@informatik.uni-hamburg.de Fakultät für Mathematik, Informatik und Naturwissenschaften Technische Aspekte Multimodaler Systeme 20. April 2010 J. Zhang 63 Gliederung Allgemeine Informationen
- Jianwei Zhang zhang@informatik.uni-hamburg.de Fakultät für Mathematik, Informatik und Naturwissenschaften Technische Aspekte Multimodaler Systeme 20. April 2010 J. Zhang 63 Gliederung Allgemeine Informationen
Was ist Robotik? Robotik heute:
 Grundlagen Was ist Robotik? Das Wort Robot / Roboter entstand 92 in einer Geschichte von Karel Ċapek und geht auf das tschechische Wort robota (rbeit, Fronarbeit) zurück. Dessen Ursprung ist das altkirchenslawische
Grundlagen Was ist Robotik? Das Wort Robot / Roboter entstand 92 in einer Geschichte von Karel Ċapek und geht auf das tschechische Wort robota (rbeit, Fronarbeit) zurück. Dessen Ursprung ist das altkirchenslawische
Ziel: Beschreibung der unterschiedlichen Gelenktypen und deren Einfluss auf die Bewegung der Körper
 Kinematik Gelenkkinematik Ziel: Beschreibung der unterschiedlichen Gelenktypen und deren Einfluss auf die Bewegung der Körper Definition: Ein (kinematisches) Gelenk ist eine Verbindung zwischen zwei Segmenten,
Kinematik Gelenkkinematik Ziel: Beschreibung der unterschiedlichen Gelenktypen und deren Einfluss auf die Bewegung der Körper Definition: Ein (kinematisches) Gelenk ist eine Verbindung zwischen zwei Segmenten,
Portabler Leichtbauroboter
 Portabler Leichtbauroboter Starke Argumente. Vielfältige Möglichkeiten. Gesamtgewicht nur 5,7 kg Einfache Installation Kraftvoll Wetterbeständig Kohlefaserstruktur Geringer Energieverbrauch Geräuscharm
Portabler Leichtbauroboter Starke Argumente. Vielfältige Möglichkeiten. Gesamtgewicht nur 5,7 kg Einfache Installation Kraftvoll Wetterbeständig Kohlefaserstruktur Geringer Energieverbrauch Geräuscharm
SO MUSS ROBOTIK SEIN EINFACH, FLEXIBEL UND GÜNSTIG AUTOMATISIEREN
 SO MUSS ROBOTIK SEIN EINFACH, FLEXIBEL UND GÜNSTIG AUTOMATISIEREN EINFACH, FLEXIBEL UND GÜNSTIG AUTOMATISIEREN J+K ROBOTERTECHNIK Preiswerte und flexible Automatisierung für jedermann. Es ist mir eine
SO MUSS ROBOTIK SEIN EINFACH, FLEXIBEL UND GÜNSTIG AUTOMATISIEREN EINFACH, FLEXIBEL UND GÜNSTIG AUTOMATISIEREN J+K ROBOTERTECHNIK Preiswerte und flexible Automatisierung für jedermann. Es ist mir eine
Prüfung WS 2006/07. Robotik
 Prüfung WS 26/7 Robotik Anmerkungen: Aufgabenblätter auf Vollständigkeit überprüfen Nur Blätter mit Namen und Matr.Nr. werden korrigiert. Keine rote Farbe verwenden. Zu jeder Lösung Aufgabennummer angeben.
Prüfung WS 26/7 Robotik Anmerkungen: Aufgabenblätter auf Vollständigkeit überprüfen Nur Blätter mit Namen und Matr.Nr. werden korrigiert. Keine rote Farbe verwenden. Zu jeder Lösung Aufgabennummer angeben.
Der neue KR 3 AGILUS. Das agile Leichtgewicht. Reinhard Nagler Sales Manager
 Der neue KR 3 AGILUS Das agile Leichtgewicht Reinhard Nagler Sales Manager Die KR AGILUS Familie Starke Kleinrobotik-Familie für Traglasten von 3 bis 10 kg Wurde in nur 4 Jahren zu unserem meistverkauften
Der neue KR 3 AGILUS Das agile Leichtgewicht Reinhard Nagler Sales Manager Die KR AGILUS Familie Starke Kleinrobotik-Familie für Traglasten von 3 bis 10 kg Wurde in nur 4 Jahren zu unserem meistverkauften
Mobile Robotik KMR QUANTEC
 Mobile Robotik KMR QUANTEC DE KMR QUANTEC Eine neue Dimension der Robotik mit bewährter KUKA Qualität Er arbeitet hochpräzise mit aktuellsten KR QUANTEC Konsolrobotern und der bewährten KUKA Steuerung
Mobile Robotik KMR QUANTEC DE KMR QUANTEC Eine neue Dimension der Robotik mit bewährter KUKA Qualität Er arbeitet hochpräzise mit aktuellsten KR QUANTEC Konsolrobotern und der bewährten KUKA Steuerung
Gliederung. Gliederung (cont.) Kinematik-Gleichungen - (1) Allgemeine Informationen Einführung Koordinaten eines Manipulators. Kinematik-Gleichungen
 Kinematik-Gleichungen - (1) Allgemeine Informationen Einführung Koordinaten eines Manipulators. Kinematik-Gleichungen") - Gliederung Jianwei Zhang zhang@informatik.uni-hamburg.de Fakultät für Mathematik, Informatik und Naturwissenschaften Technische Aspekte Multimodaler Systeme 20. April 2010 Allgemeine Informationen Einführung
- Gliederung Jianwei Zhang zhang@informatik.uni-hamburg.de Fakultät für Mathematik, Informatik und Naturwissenschaften Technische Aspekte Multimodaler Systeme 20. April 2010 Allgemeine Informationen Einführung
Vorwärtskinematik und inverse Kinematik. Andreas Schmidtke
 Vorwärtskinematik und inverse Kinematik Andreas Schmidtke Übersicht 1. Vorwärtskinematik 2. Standardframes 3. Inverse Kinematik 4. Bemerkungen zur Numerik Übersicht 1. Vorwärtskinematik 1. Modellierung
Vorwärtskinematik und inverse Kinematik Andreas Schmidtke Übersicht 1. Vorwärtskinematik 2. Standardframes 3. Inverse Kinematik 4. Bemerkungen zur Numerik Übersicht 1. Vorwärtskinematik 1. Modellierung
Übung 1: Homogene Transformationen
 Übung 1: Homogene Transformationen Aufgabe 1.1: Bestimmen Sie die homogene Transformationsmatri für die folgende Sequenz von Rotationen: T 1 =Rot z,90 Rot,90 und T 2 =Rot,90 Rot z,90 Zeichnen Sie die entsprechenden
Übung 1: Homogene Transformationen Aufgabe 1.1: Bestimmen Sie die homogene Transformationsmatri für die folgende Sequenz von Rotationen: T 1 =Rot z,90 Rot,90 und T 2 =Rot,90 Rot z,90 Zeichnen Sie die entsprechenden
Bewegungsbefehle. Bewegungsbefehle eines Roboters enthalten folgende Angaben:
 Bewegungsbefehle Bewegungsbefehle eines Roboters enthalten folgende Angaben: eine Roboterstellung detaillierte Angaben zu der Bewegung, mit der der die betreffende Roboterstellung angefahren werden soll.
Bewegungsbefehle Bewegungsbefehle eines Roboters enthalten folgende Angaben: eine Roboterstellung detaillierte Angaben zu der Bewegung, mit der der die betreffende Roboterstellung angefahren werden soll.
Trainingssysteme für die Robotik. Mit den Schulungsrobotern auf leichte und verständliche Weise komplexe Themen der Robotik vermitteln
 Trainingssysteme für die Robotik Mit den Schulungsrobotern auf leichte und verständliche Weise komplexe Themen der Robotik vermitteln Automatisierungstechnik Trainingssysteme für die Robotik Der Start
Trainingssysteme für die Robotik Mit den Schulungsrobotern auf leichte und verständliche Weise komplexe Themen der Robotik vermitteln Automatisierungstechnik Trainingssysteme für die Robotik Der Start
1 Einführung in die Robotik
 1 Einführung in die Robotik Zielsetzung Sie können nur dann erfolgreich Software für Roboter entwickeln, wenn Sie ein Grundwissen auf diesem Fachgebiet haben. Ein Blick auf die Historie und ihre auslösenden
1 Einführung in die Robotik Zielsetzung Sie können nur dann erfolgreich Software für Roboter entwickeln, wenn Sie ein Grundwissen auf diesem Fachgebiet haben. Ein Blick auf die Historie und ihre auslösenden
Neue Roboterlösungen für die automatisierte Bearbeitung bei kleinsten Losgrössen
 Neue Roboterlösungen für die automatisierte Bearbeitung bei kleinsten Losgrössen The European Robot Initiative for Strengthening the Competitiveness of SMEs in Manufacturing Jens Hofschulte ABB Forschungszentrum
Neue Roboterlösungen für die automatisierte Bearbeitung bei kleinsten Losgrössen The European Robot Initiative for Strengthening the Competitiveness of SMEs in Manufacturing Jens Hofschulte ABB Forschungszentrum
4. Roboterkinematiken
 4. Roboterkinematiken Begriffe Kinematik, Dynamik und Achsen Freiheitsgrad und Bewegungsfreiheitsgrad Symbolische Darstellung von Kinematiken Konfigurationen und Arbeitsräume Direkte und inverse Kinematik
4. Roboterkinematiken Begriffe Kinematik, Dynamik und Achsen Freiheitsgrad und Bewegungsfreiheitsgrad Symbolische Darstellung von Kinematiken Konfigurationen und Arbeitsräume Direkte und inverse Kinematik
PICK & PLACE HP: DIE DIREKTE ALTERNATIVE DIE LÖSUNG FÜR DEN REINRAUM FREI UND INTUITIV PROGRAMMIERBAR
 HP HANDLINGGERÄTE HANDLINGGERÄT HP Pick & Place HP 70: zwei horizontale Linearmotorachsen parallel übereinander, verbunden durch eine kinematische Einheit. Die Konstruktion ermöglicht eine Modulbreite
HP HANDLINGGERÄTE HANDLINGGERÄT HP Pick & Place HP 70: zwei horizontale Linearmotorachsen parallel übereinander, verbunden durch eine kinematische Einheit. Die Konstruktion ermöglicht eine Modulbreite
10.4 Formblatt Modulhandbuch Modulbezeichnung: ggf. Kürzel. ggf. Untertitel. ggf. Lehrveranstaltungen: Semester: Modulverantwortliche(r): Dozent(in):
: Dozent(in):") 10.4 Formblatt Modulhandbuch Modulbezeichnung: Robotik ggf. Kürzel ROB ggf. Untertitel ggf. Lehrveranstaltungen: Semester: Modulverantwortliche(r): Dozent(in): Sprache: Einführung in die Robotertechnik,
10.4 Formblatt Modulhandbuch Modulbezeichnung: Robotik ggf. Kürzel ROB ggf. Untertitel ggf. Lehrveranstaltungen: Semester: Modulverantwortliche(r): Dozent(in): Sprache: Einführung in die Robotertechnik,
APRIL 2017 ABB Robotics Education Package. Yves Brunner, Sales Engineer,
 APRIL 2017 ABB Robotics Education Package Yves Brunner, Sales Engineer, yves.brunner@ch.abb.com, +41 79 573 79 60 DAS EDUCATION PACKAGE BIETET DIE GESAMTE NOTWENDIGE HARD- UND SOFTWARE FÜR EINEN MODERNEN
APRIL 2017 ABB Robotics Education Package Yves Brunner, Sales Engineer, yves.brunner@ch.abb.com, +41 79 573 79 60 DAS EDUCATION PACKAGE BIETET DIE GESAMTE NOTWENDIGE HARD- UND SOFTWARE FÜR EINEN MODERNEN
Hochschule Augsburg University of Applied Sciences
 Hochschule Augsburg University of Applied Sciences Vorlesung Robotertechnik Bewertung von Roboterkinematiken hinsichtlich Automatisierungsaufgaben und Steuerungstechnik Prof. Dr.-Ing. Eberhard Roos Fakultät
Hochschule Augsburg University of Applied Sciences Vorlesung Robotertechnik Bewertung von Roboterkinematiken hinsichtlich Automatisierungsaufgaben und Steuerungstechnik Prof. Dr.-Ing. Eberhard Roos Fakultät
Inverse Kinematik am Robotersimulationsprogramm EASY-ROB
 Workshop Robotik Hochschule Mittweida (FH) Institut für Automatisierungstechnik 15. Oktober 2004 Stefan Anton Inverse Kinematik am Robotersimulationsprogramm EASY-ROB Problemstellung Bei der Betrachtung
Workshop Robotik Hochschule Mittweida (FH) Institut für Automatisierungstechnik 15. Oktober 2004 Stefan Anton Inverse Kinematik am Robotersimulationsprogramm EASY-ROB Problemstellung Bei der Betrachtung
FORT BI LDU N G E N 4.0
 FORT BI LDU N G E N 4.0 FORTBILDUNG 4.0 ÜBERSICHT Bereich MM-Ebene Fortbildung Dauer (Tage) / KUKA Einführung Robotertechnik 1 / KUKA Umsteiger Programmieren für Experten KUKA KRC4, FANUC R-30iB 5 / KUKA
FORT BI LDU N G E N 4.0 FORTBILDUNG 4.0 ÜBERSICHT Bereich MM-Ebene Fortbildung Dauer (Tage) / KUKA Einführung Robotertechnik 1 / KUKA Umsteiger Programmieren für Experten KUKA KRC4, FANUC R-30iB 5 / KUKA
LBR iiwa. Mit Gefühl.
 LBR iiwa. Mit Gefühl. ii invite you KUKA Roboter GmbH R-IBD M. Micheler 12.06.2014 Seite 2 LBR iiwa die Features [+] Mobilität Programmieren durch Vormachen [+] Steuerung für sensorbasierte Robotik [+]
LBR iiwa. Mit Gefühl. ii invite you KUKA Roboter GmbH R-IBD M. Micheler 12.06.2014 Seite 2 LBR iiwa die Features [+] Mobilität Programmieren durch Vormachen [+] Steuerung für sensorbasierte Robotik [+]
TX40. Industrieroboter - 6 Achsen
 TX40 Industrieroboter - 6 Achsen Roboterprogramm von Vier- und Sechsachsrobotern für nahezu jeden Einsatzbereich Überall, wo es auf Geschwindigkeit, Genauigkeit oder Zuverlässigkeit ankommt, bieten Stäubli
TX40 Industrieroboter - 6 Achsen Roboterprogramm von Vier- und Sechsachsrobotern für nahezu jeden Einsatzbereich Überall, wo es auf Geschwindigkeit, Genauigkeit oder Zuverlässigkeit ankommt, bieten Stäubli
Einweisung in Off-line-Programmierübung mit dem ABB- Roboter YuMi (Irb14000)
") Einweisung in Off-line-Programmierübung mit dem ABB- Roboter YuMi (Irb14000) Roboter Yumi Irb14000 (ABB) Kenndaten: kollaborativer zweiarmiger Roboter je Arm 7 Achsen Nennlast 500g abzüglich der Hände:
Einweisung in Off-line-Programmierübung mit dem ABB- Roboter YuMi (Irb14000) Roboter Yumi Irb14000 (ABB) Kenndaten: kollaborativer zweiarmiger Roboter je Arm 7 Achsen Nennlast 500g abzüglich der Hände:
Schriftliche Prüfung im Fach Robotertechnik
 Fachhochschule Augsburg Fachbereich Maschinenbau Dr.-Ing. E. Roos Schriftliche Prüfung im Fach Robotertechnik am in der Zeit von 14.30 Uhr bis 16.00 Uhr im Raum B302 vom Studenten auszufüllen: : (Druckschrift)...
Fachhochschule Augsburg Fachbereich Maschinenbau Dr.-Ing. E. Roos Schriftliche Prüfung im Fach Robotertechnik am in der Zeit von 14.30 Uhr bis 16.00 Uhr im Raum B302 vom Studenten auszufüllen: : (Druckschrift)...
Entwicklung einer allgemeinen dynamischen inversen Kinematik
 Entwicklung einer allgemeinen dynamischen inversen Kinematik Christoph Schmiedecke Studiendepartment Informatik Hochschule für Angewandte Wissenschaften Hamburg 06. Januar 2010 Inhaltsverzeichnis 1 Motivation
Entwicklung einer allgemeinen dynamischen inversen Kinematik Christoph Schmiedecke Studiendepartment Informatik Hochschule für Angewandte Wissenschaften Hamburg 06. Januar 2010 Inhaltsverzeichnis 1 Motivation
Mechanik und Motoren
 Mechanik und Motoren Mechanik und Antrieb (Aktuatoren) Welche Art von Mechanik und Aktuatoren verwendet werden, wird durch die gewünscht Funktion des Roboters bestimmt Früher versuchte man Roboter zu bauen,
Mechanik und Motoren Mechanik und Antrieb (Aktuatoren) Welche Art von Mechanik und Aktuatoren verwendet werden, wird durch die gewünscht Funktion des Roboters bestimmt Früher versuchte man Roboter zu bauen,
Roboterbaureihe TX60. Industrieroboter - 6 Achsen
 Roboterbaureihe TX60 Industrieroboter - 6 Achsen Roboterprogramm von Vier- und Sechsachsrobotern für nahezu jeden Einsatzbereich Überall, wo es auf Geschwindigkeit, Genauigkeit oder Zuverlässigkeit ankommt,
Roboterbaureihe TX60 Industrieroboter - 6 Achsen Roboterprogramm von Vier- und Sechsachsrobotern für nahezu jeden Einsatzbereich Überall, wo es auf Geschwindigkeit, Genauigkeit oder Zuverlässigkeit ankommt,
Universalverfahrachsen
 Universalverfahrachsen solutions by F.EE Elektrotech Engineering Automation Robotik Informatik + Systeme Solar- und Energietechnik F.EE GmbH In der Seugn 10 u. 20 www.fee.de 11 / 2011 2 Inhaltsverzeichnis
Universalverfahrachsen solutions by F.EE Elektrotech Engineering Automation Robotik Informatik + Systeme Solar- und Energietechnik F.EE GmbH In der Seugn 10 u. 20 www.fee.de 11 / 2011 2 Inhaltsverzeichnis
Gliederung. Gliederung (cont.) Gliederung (cont.)
 Gliederung (cont.)") - Gliederung Jianwei Zhang zhang@informatik.uni-hamburg.de Fakultät für Mathematik, Informatik und Naturwissenschaften Technische Aspekte Multimodaler Systeme 11. Mai 2010 Allgemeine Informationen Einführung
- Gliederung Jianwei Zhang zhang@informatik.uni-hamburg.de Fakultät für Mathematik, Informatik und Naturwissenschaften Technische Aspekte Multimodaler Systeme 11. Mai 2010 Allgemeine Informationen Einführung
Bewegungssteuerung und Programmierung von Robotersystemen. Klausur
 Fachhochschule Darmstadt Fachbereich Elektrotechnik und Informationstechnik Prof. Dr.-Ing. A. Weigl-Seit ewegungssteuerung und Programmierung von Robotersstemen Klausur 1. Februar 2006 10:15 11:45 Uhr
Fachhochschule Darmstadt Fachbereich Elektrotechnik und Informationstechnik Prof. Dr.-Ing. A. Weigl-Seit ewegungssteuerung und Programmierung von Robotersstemen Klausur 1. Februar 2006 10:15 11:45 Uhr
Roboterbaureihe RX160. Industrieroboter - 6 Achsen
 Roboterbaureihe RX160 Industrieroboter - 6 Achsen Roboterprogramm von Vier- und Sechsachsrobotern für nahezu jeden Einsatzbereich Überall, wo es auf Geschwindigkeit, Genauigkeit oder Zuverlässigkeit ankommt,
Roboterbaureihe RX160 Industrieroboter - 6 Achsen Roboterprogramm von Vier- und Sechsachsrobotern für nahezu jeden Einsatzbereich Überall, wo es auf Geschwindigkeit, Genauigkeit oder Zuverlässigkeit ankommt,
Handhabungstechnik mit Robotertechnik
 Jörg Bartenschlager Hans Hebel Georg Schmidt 2008 AGI-Information Management Consultants May be used for personal purporses only or by libraries associated to dandelon.com network. Handhabungstechnik mit
Jörg Bartenschlager Hans Hebel Georg Schmidt 2008 AGI-Information Management Consultants May be used for personal purporses only or by libraries associated to dandelon.com network. Handhabungstechnik mit
Inhalt. 1 Maschinennaher Materialluss im Industriebetrieb 13
 Inhalt Vorwort... 5 1 Maschinennaher Materialluss im Industriebetrieb 13 1.1 Geschichtlicher Rückblick... 13 1.2 Zeitleiste Industrieroboter (Auswahl)...................... 18 1.3 Literatur und Quellenverzeichnis...
Inhalt Vorwort... 5 1 Maschinennaher Materialluss im Industriebetrieb 13 1.1 Geschichtlicher Rückblick... 13 1.2 Zeitleiste Industrieroboter (Auswahl)...................... 18 1.3 Literatur und Quellenverzeichnis...
Tag X [mm] Y [mm] Z [mm] Rx [ ] Ry [ ] Rz [ ] T T T T
![Tag X [mm] Y [mm] Z [mm] Rx [ ] Ry [ ] Rz [ ] T T T T](/thumbs/53/33060008.jpg "Tag X [mm] Y [mm] Z [mm] Rx [ ] Ry [ ] Rz [ ] T T T T") EASY-ROB Bedienungshinweis Bahnbewegung und Interpolation Zeitverhalten bei verschiedenen Interpolationsarten Die Bahnplanung hat die Aufgabe den Weg im kartesischen Raum vom Startpunkt A zum Zielpunkt
EASY-ROB Bedienungshinweis Bahnbewegung und Interpolation Zeitverhalten bei verschiedenen Interpolationsarten Die Bahnplanung hat die Aufgabe den Weg im kartesischen Raum vom Startpunkt A zum Zielpunkt
robolab Prototypenwerkstatt: Ein Leitfaden
 robolab Prototypenwerkstatt: Ein Leitfaden Fakultätswerkstatt Architektur und Stadtlpanung Universität Stuttgart Inhalt Einführung 1 Komponenten der Roboteranlage 1.1 Roboterarm 1.2 Achsen 1.3 Koordinatensysteme
robolab Prototypenwerkstatt: Ein Leitfaden Fakultätswerkstatt Architektur und Stadtlpanung Universität Stuttgart Inhalt Einführung 1 Komponenten der Roboteranlage 1.1 Roboterarm 1.2 Achsen 1.3 Koordinatensysteme
White Paper Kartesische Handling Systeme ein technischer Vergleich mit klassischen Robotern
 White Paper Kartesische Handling Systeme ein technischer Vergleich mit klassischen Robotern Warum lohnt es sich, kartesische Handling Systeme einzusetzen? Der Trend bei klassischen Montage- und Handhabungs-Lösungen
White Paper Kartesische Handling Systeme ein technischer Vergleich mit klassischen Robotern Warum lohnt es sich, kartesische Handling Systeme einzusetzen? Der Trend bei klassischen Montage- und Handhabungs-Lösungen
Der Techman TM5 / TM12 / TM14
 Der Techman TM5 / TM12 / TM14 Der erste Kollaborierende Roboter mit eingebautem Kamera-System Perfekt für Industrie 4.0 Höchste Flexibilität und Anpassungsfähigkeit an sich ändernde Aufgaben Äußerst geringe
Der Techman TM5 / TM12 / TM14 Der erste Kollaborierende Roboter mit eingebautem Kamera-System Perfekt für Industrie 4.0 Höchste Flexibilität und Anpassungsfähigkeit an sich ändernde Aufgaben Äußerst geringe
Der Techman TM5 / TM12 / TM14
 Techman 6-Achsen Robot mit voll integriertem Kamera-System Der Techman TM5 / TM12 / TM14 Der Leichtbau- Roboter mit integriertem Kamerasystem Kollaborationsfähiges Gerät durch integrierte Sicherheit Mensch
Techman 6-Achsen Robot mit voll integriertem Kamera-System Der Techman TM5 / TM12 / TM14 Der Leichtbau- Roboter mit integriertem Kamerasystem Kollaborationsfähiges Gerät durch integrierte Sicherheit Mensch
Robotik Mein Roboter erledigt das für mich
 myresearch Robotik Mein Roboter erledigt das für mich Wien 2008-11-06 Dipl. Ing.(FH) Christof Hieger Hieger C., Technikum Wien - Institut Mechatronics Übersicht 1. Do., 23.10.2008 Forschung und Entwicklung
myresearch Robotik Mein Roboter erledigt das für mich Wien 2008-11-06 Dipl. Ing.(FH) Christof Hieger Hieger C., Technikum Wien - Institut Mechatronics Übersicht 1. Do., 23.10.2008 Forschung und Entwicklung
Pick& Place HP: die direkte Alternative. Handlinggeräte
 Handlinggeräte Pick&Place HP70: zwei horizontale Linearmotorachsen parallel übereinander, verbunden durch eine kinematische Einheit. Die Konstruktion ermöglicht eine Modulbreite von sechzig Millimetern.
Handlinggeräte Pick&Place HP70: zwei horizontale Linearmotorachsen parallel übereinander, verbunden durch eine kinematische Einheit. Die Konstruktion ermöglicht eine Modulbreite von sechzig Millimetern.
DriveSets - Einbaufertige Positioniersysteme. Bewegung leicht gemacht. drivesets.systec.de
 DriveSets - Einbaufertige Positioniersysteme Bewegung leicht gemacht drivesets.systec.de DriveSets im Detail Steuerung Software Dokumentation Energieketten Kabel Befestigungen Sensoren TCP Linearmodule
DriveSets - Einbaufertige Positioniersysteme Bewegung leicht gemacht drivesets.systec.de DriveSets im Detail Steuerung Software Dokumentation Energieketten Kabel Befestigungen Sensoren TCP Linearmodule
TX2-40. Industrieroboter - 6 Achsen
 TX2-40 Industrieroboter - 6 Achsen Roboterprogramm von Vier- und Sechsachsrobotern für nahezu jeden Einsatzbereich Überall, wo Hersteller Geschwindigkeit, gen bestimmter Märkte erfüllen: Elektronik, Genauigkeit
TX2-40 Industrieroboter - 6 Achsen Roboterprogramm von Vier- und Sechsachsrobotern für nahezu jeden Einsatzbereich Überall, wo Hersteller Geschwindigkeit, gen bestimmter Märkte erfüllen: Elektronik, Genauigkeit
WAS IST DRAG&BOT? Ihre Vorteile. drag&bot ist eine Software zur einfachen, graphischen Inbetriebnahme und Programmierung von Roboterlösungen.
 WAS IST DRAG&BOT? drag&bot ist eine Software zur einfachen, graphischen Inbetriebnahme und Programmierung von Roboterlösungen. Ihre Vorteile +50% Kosteneinsparung im Gegensatz zu schlüsselfertigen Automatisierungslösungen
WAS IST DRAG&BOT? drag&bot ist eine Software zur einfachen, graphischen Inbetriebnahme und Programmierung von Roboterlösungen. Ihre Vorteile +50% Kosteneinsparung im Gegensatz zu schlüsselfertigen Automatisierungslösungen
Roboterbaureihe TX2-90. Industrieroboter - 6 Achsen
 Roboterbaureihe TX-90 Industrieroboter - Achsen Roboterprogramm von Vier- und Sechsachsrobotern für nahezu jeden Einsatzbereich Überall, wo Hersteller Geschwindigkeit, gen bestimmter Märkte erfüllen: Elektronik,
Roboterbaureihe TX-90 Industrieroboter - Achsen Roboterprogramm von Vier- und Sechsachsrobotern für nahezu jeden Einsatzbereich Überall, wo Hersteller Geschwindigkeit, gen bestimmter Märkte erfüllen: Elektronik,
Robotertechnik. Vorlesung. Prof. Dr.-Ing. Christoph Woernle. Universität Rostock WS 2018/19. Lehrstuhl für Technische Mechanik/Dynamik
 Robotertechnik Übersicht 0. Vorlesung Robotertechnik Prof. Dr.-Ing. Christoph Woernle Universität Rostock WS 208/9 Robotertechnik Übersicht 0.2 Manuskripte zur Vorlesung zum Download http://www.hro.ipa.fraunhofer.de/fhg/agp_iff/lehre/skripte/index.jsp
Robotertechnik Übersicht 0. Vorlesung Robotertechnik Prof. Dr.-Ing. Christoph Woernle Universität Rostock WS 208/9 Robotertechnik Übersicht 0.2 Manuskripte zur Vorlesung zum Download http://www.hro.ipa.fraunhofer.de/fhg/agp_iff/lehre/skripte/index.jsp
2. Kinematik Mechanische Bewegung. Zusammenfassung. Vorlesung. Übungen
 Lehr- und Lernmaterial / Physik für M-Kurse am Landesstudienkolleg Halle / Jörg Thurm 2. Kinematik Physikalische Grundlagen Vorlesung 2.1. Mechanische Bewegung Zusammenfassung 1. Semester / 2. Thema /
Lehr- und Lernmaterial / Physik für M-Kurse am Landesstudienkolleg Halle / Jörg Thurm 2. Kinematik Physikalische Grundlagen Vorlesung 2.1. Mechanische Bewegung Zusammenfassung 1. Semester / 2. Thema /
1 Ein Roboter darf keinem Menschen verletzen oder diurch Unterlassung die Verletzung eines Menschen hervorrufen
 Robotik Vorbereitung Asimov s Robotergesetze 1 Ein Roboter darf keinem Menschen verletzen oder diurch Unterlassung die Verletzung eines Menschen hervorrufen 2 Roboter muß Anweisungen Menschen gehorchen,
Robotik Vorbereitung Asimov s Robotergesetze 1 Ein Roboter darf keinem Menschen verletzen oder diurch Unterlassung die Verletzung eines Menschen hervorrufen 2 Roboter muß Anweisungen Menschen gehorchen,
Geschichte. Automatische Theater und Musik. Leonardo da Vinci zeichnete Androiden. von Heron von Alexandria. Beeinflusst von Al-Dschazari
 Was ist Robotik? Robotertechnik Besteht aus: Physik, Informatik & Kinetik Bereiche: Elektronik und Maschinenbau Ziel: Zusammenarbeit zwischen Elektronik und Mechanik Beweggrund: Arbeit zu erleichtern oder
Was ist Robotik? Robotertechnik Besteht aus: Physik, Informatik & Kinetik Bereiche: Elektronik und Maschinenbau Ziel: Zusammenarbeit zwischen Elektronik und Mechanik Beweggrund: Arbeit zu erleichtern oder
Roboterbaureihe TX90. Industrieroboter - 6 Achsen
 Roboterbaureihe TX90 Industrieroboter - 6 Achsen Roboterprogramm von Vier- und Sechsachsrobotern für nahezu jeden Einsatzbereich Überall, wo es auf Geschwindigkeit, Genauigkeit oder Zuverlässigkeit ankommt,
Roboterbaureihe TX90 Industrieroboter - 6 Achsen Roboterprogramm von Vier- und Sechsachsrobotern für nahezu jeden Einsatzbereich Überall, wo es auf Geschwindigkeit, Genauigkeit oder Zuverlässigkeit ankommt,
B. Heimann, W. Gerth, K. Popp: Mechatronik. Dritte, neu bearbeitete Auflage. Carl Hanser Verlag, München, 2007.
 Vorwort Nachfolgend soll die Koordinatentransformation nach Denavit-Hartenberg-Konvention am Beispiel eines realen Industrieroboters demonstriert werden. In der Kürze kann auf die nötigen Grundlagen nicht
Vorwort Nachfolgend soll die Koordinatentransformation nach Denavit-Hartenberg-Konvention am Beispiel eines realen Industrieroboters demonstriert werden. In der Kürze kann auf die nötigen Grundlagen nicht
TX2-40. Industrieroboter - 6 Achsen
 TX2-40 Industrieroboter - 6 Achsen Roboterprogramm von Vier- und Sechsachsrobotern für nahezu jeden Einsatzbereich Überall, wo Hersteller Geschwindigkeit, Genauigkeit oder Zuverlässigkeit fordern, bieten
TX2-40 Industrieroboter - 6 Achsen Roboterprogramm von Vier- und Sechsachsrobotern für nahezu jeden Einsatzbereich Überall, wo Hersteller Geschwindigkeit, Genauigkeit oder Zuverlässigkeit fordern, bieten
TS60 ESD. Industrieroboter 4 Achsen - Elektronikindustrie
 TS60 ESD Industrieroboter 4 Achsen - Elektronikindustrie Roboterprogramm von Vier- und Sechsachsrobotern für nahezu jeden Einsatzbereich Stäubli Roboter sind erste Wahl für jede gen bestimmter Märkte
TS60 ESD Industrieroboter 4 Achsen - Elektronikindustrie Roboterprogramm von Vier- und Sechsachsrobotern für nahezu jeden Einsatzbereich Stäubli Roboter sind erste Wahl für jede gen bestimmter Märkte
Roboterbaureihe TX2-60. Industrieroboter - 6 Achsen
 Roboterbaureihe TX2-60 Industrieroboter - 6 Achsen Roboterprogramm von Vier- und Sechsachsrobotern für nahezu jeden Einsatzbereich Überall, wo Hersteller Geschwindigkeit, Genauigkeit oder Zuverlässigkeit
Roboterbaureihe TX2-60 Industrieroboter - 6 Achsen Roboterprogramm von Vier- und Sechsachsrobotern für nahezu jeden Einsatzbereich Überall, wo Hersteller Geschwindigkeit, Genauigkeit oder Zuverlässigkeit
Presseinformation. KEBA auf der Motek 2008 Stand 7522 in Halle 7
 Presseinformation KEBA auf der Motek 2008 Stand 7522 in Halle 7 Pressekontakt Thomas Ameseder, Dipl.-Ing. (FH). Marketing Kommunikation, Industrieautomation KEBA AG Gewerbepark Urfahr, A-4041 Linz Telefon:
Presseinformation KEBA auf der Motek 2008 Stand 7522 in Halle 7 Pressekontakt Thomas Ameseder, Dipl.-Ing. (FH). Marketing Kommunikation, Industrieautomation KEBA AG Gewerbepark Urfahr, A-4041 Linz Telefon:
Robots. KUKA Deutschland GmbH. KR QUANTEC K prime. Spezifikation KR QUANTEC. K prime. Stand: Version: Spez KR QUANTEC K prime V7
 Robots KUKA Deutschland GmbH KR QUANTEC K prime Spezifikation KR QUANTEC K prime Stand: 29.03.2018 Version: Spez KR QUANTEC K prime V7 Copyright 2018 KUKA Deutschland GmbH Zugspitzstraße 140 D-86165 Augsburg
Robots KUKA Deutschland GmbH KR QUANTEC K prime Spezifikation KR QUANTEC K prime Stand: 29.03.2018 Version: Spez KR QUANTEC K prime V7 Copyright 2018 KUKA Deutschland GmbH Zugspitzstraße 140 D-86165 Augsburg
Rennstrecke im Automatik Extern Betrieb
 Rennstrecke im Automatik Extern Betrieb Aufgabenbeschreibung: In der letzten Übung dieses Lehrgangs soll das Zusammenspiel vom KUKA Roboter mit einer übergeordneten Steuerung betrachtet werden. In dieser
Rennstrecke im Automatik Extern Betrieb Aufgabenbeschreibung: In der letzten Übung dieses Lehrgangs soll das Zusammenspiel vom KUKA Roboter mit einer übergeordneten Steuerung betrachtet werden. In dieser
Humanoide Roboter. Shuji Kajita. Theorie und Technik des Künstlichen Menschen AKA. Herausgeber
 Humanoide Roboter Theorie und Technik des Künstlichen Menschen Herausgeber Shuji Kajita AKA Inhaltsverzeichnis Vorwort Thomas Christaller ix Shuji Kajita Kapitel 1. Überblick Humanoide Roboter 1 Kapitel
Humanoide Roboter Theorie und Technik des Künstlichen Menschen Herausgeber Shuji Kajita AKA Inhaltsverzeichnis Vorwort Thomas Christaller ix Shuji Kajita Kapitel 1. Überblick Humanoide Roboter 1 Kapitel
INTUITIVE PROGRAMMIERUNG. Einsatz von industriellen Robotersystemen im Mittelstand
 INTUITIVE PROGRAMMIERUNG Einsatz von industriellen Robotersystemen im Mittelstand Herausforderung: Industrieroboter im Mittelstand Industrieroboter werden derzeit aufgrund ihrer Komplexität und des damit
INTUITIVE PROGRAMMIERUNG Einsatz von industriellen Robotersystemen im Mittelstand Herausforderung: Industrieroboter im Mittelstand Industrieroboter werden derzeit aufgrund ihrer Komplexität und des damit
Vakuum-Sauggreifer 9V
 536625 Vakuum-Sauggreifer 9V M3 + C3 I2 I3 M2 + C2 I1 M1+C1 O7 O8 Einleitung Der Vakuum-Sauggreifer von fischertechnik ist ein Trainingsmodell, bestehend aus fischertechnik Bauteilen, welcher einen Industrieroboter
536625 Vakuum-Sauggreifer 9V M3 + C3 I2 I3 M2 + C2 I1 M1+C1 O7 O8 Einleitung Der Vakuum-Sauggreifer von fischertechnik ist ein Trainingsmodell, bestehend aus fischertechnik Bauteilen, welcher einen Industrieroboter
Zwei 6-Achs-CNC-Roboter-Baureihen Für SGM von 20 bis t
 Zwei 6-Achs-CNC-Roboter-Baureihen Für SGM von 20 bis 5.000 t Sepro erweitert sein Portfolio und bietet jetzt zwei Baureihen 6-Achs-Roboter an : - die Baureihe Sepro-Stäubli zur Ausrüstung von SGM von 20
Zwei 6-Achs-CNC-Roboter-Baureihen Für SGM von 20 bis 5.000 t Sepro erweitert sein Portfolio und bietet jetzt zwei Baureihen 6-Achs-Roboter an : - die Baureihe Sepro-Stäubli zur Ausrüstung von SGM von 20
Vorlesung Technische Mechanik 1 Statik, Wintersemester 2007/2008. Technische Mechanik
 Technische Mechanik 1. Einleitung 2. Statik des starren Körpers 3. Statik von Systemen starrer Körper 3.1 Gleichgewichtsbedingungen, das Erstarrungsprinzip 3.2 Lager 3.2.1 Lagerung in der Ebene 3.2.2 Allgemeiner
Technische Mechanik 1. Einleitung 2. Statik des starren Körpers 3. Statik von Systemen starrer Körper 3.1 Gleichgewichtsbedingungen, das Erstarrungsprinzip 3.2 Lager 3.2.1 Lagerung in der Ebene 3.2.2 Allgemeiner
Lineare Abbildungen. De nition Seien V, W Vektorräume. Eine Abbildung f : V! W heißt linear, wenn gilt
 Lineare Abbildungen Lineare Abbildungen De nition Seien V, W Vektorräume. Eine Abbildung f : V! W heißt linear, wenn gilt (L. ) f ist homogen; d.h. f( ~v) = f(~v) für alle 2 R, ~v 2 V, (L. ) f ist additiv;
Lineare Abbildungen Lineare Abbildungen De nition Seien V, W Vektorräume. Eine Abbildung f : V! W heißt linear, wenn gilt (L. ) f ist homogen; d.h. f( ~v) = f(~v) für alle 2 R, ~v 2 V, (L. ) f ist additiv;
Mensch-Roboter Kooperation
 Mensch-Roboter Kooperation als Herausforderung und Lösung Interaktive Roboterprogrammierung vor dem Hintergrund variierender Applikationen Ruth Maria Otto (Dipl. Math. Univ.) Projektconsultant für Robotik
Mensch-Roboter Kooperation als Herausforderung und Lösung Interaktive Roboterprogrammierung vor dem Hintergrund variierender Applikationen Ruth Maria Otto (Dipl. Math. Univ.) Projektconsultant für Robotik
Oberflächenbearbeitung. kraftgesteuerten Robotern. rcs1-steuerungstechnik
 Oberflächenbearbeitung mit kraftgesteuerten Robotern und rcs1-steuerungstechnik Aufgabenstellung: Nach wie vor stellt die Oberflächenbearbeitung bei der Automatisierung mit Robotern eine große Herausforderung
Oberflächenbearbeitung mit kraftgesteuerten Robotern und rcs1-steuerungstechnik Aufgabenstellung: Nach wie vor stellt die Oberflächenbearbeitung bei der Automatisierung mit Robotern eine große Herausforderung
Robotik in der Pflege: R2D2 für alle oder Arbeitswelt 5.0?
 Robotik in der Pflege: R2D2 für alle oder Arbeitswelt 5.0? ConSozial, 07.11.18 Barbara Rinser Caritasverband der Erzdiözese München und Freising e.v. Jörn Vogel Deutsches Zentrum für Luft- und Raumfahrt
Robotik in der Pflege: R2D2 für alle oder Arbeitswelt 5.0? ConSozial, 07.11.18 Barbara Rinser Caritasverband der Erzdiözese München und Freising e.v. Jörn Vogel Deutsches Zentrum für Luft- und Raumfahrt
IDENTIFIKATION DYNAMISCHER ROBOTERPARAMETER
 IDENTIFIKATION DYNAMISCHER ROBOTERPARAMETER Arbeit für 1-2 Personen Modellierung und Ableitung der Identifikationsgleichung für serielle Robotersysteme Elimination linearer Abhängigkeiten Berechnung optimaler
IDENTIFIKATION DYNAMISCHER ROBOTERPARAMETER Arbeit für 1-2 Personen Modellierung und Ableitung der Identifikationsgleichung für serielle Robotersysteme Elimination linearer Abhängigkeiten Berechnung optimaler
Vakuum Sauggreifer 24V
 536630 Vakuum Sauggreifer 24V Q5/Q6+B5/B6 I2 I3 Q3/Q4 + B3/B4 I1 Q1/Q2+B1/B2 Q7 Q8 Einleitung Der Vakuum-Sauggreifer von fischertechnik ist ein Trainingsmodell, bestehend aus fischertechnik Bauteilen,
536630 Vakuum Sauggreifer 24V Q5/Q6+B5/B6 I2 I3 Q3/Q4 + B3/B4 I1 Q1/Q2+B1/B2 Q7 Q8 Einleitung Der Vakuum-Sauggreifer von fischertechnik ist ein Trainingsmodell, bestehend aus fischertechnik Bauteilen,
RoboAssistent: Intuitives Programmieren von Fügevorgängen
 RoboAssistent: Intuitives Programmieren von Fügevorgängen 26.01.2005 Günter Schreiber Plug-And-Play Antriebs- und Steuerungskonzepte für die Produktion von morgen Neue Robotersysteme Produktinnovationen
RoboAssistent: Intuitives Programmieren von Fügevorgängen 26.01.2005 Günter Schreiber Plug-And-Play Antriebs- und Steuerungskonzepte für die Produktion von morgen Neue Robotersysteme Produktinnovationen
TS80 ESD. Industrieroboter 4 Achsen - Elektronikindustrie
 TS80 ESD Industrieroboter 4 Achsen Elektronikindustrie Roboterprogramm von Vier und Sechsachsrobotern für nahezu jeden Einsatzbereich Stäubli Roboter sind erste Wahl für jede gen bestimmter Märkte erfüllen:
TS80 ESD Industrieroboter 4 Achsen Elektronikindustrie Roboterprogramm von Vier und Sechsachsrobotern für nahezu jeden Einsatzbereich Stäubli Roboter sind erste Wahl für jede gen bestimmter Märkte erfüllen:
Welcome. Bienvenue Hosgeldiniz
 Willkommen Dobrodošli Welcome Benvenuti Srdečně vítejte 欢迎 Üdvözlés Bienvenue Hosgeldiniz Zapraszamy Automatisierungssysteme und Peripheriegeräte für die Kunststoffverarbeitung Wittmann ist der führenden
Willkommen Dobrodošli Welcome Benvenuti Srdečně vítejte 欢迎 Üdvözlés Bienvenue Hosgeldiniz Zapraszamy Automatisierungssysteme und Peripheriegeräte für die Kunststoffverarbeitung Wittmann ist der führenden
Höchste Flexibilität und Anpassungsfähigkeit an sich ändernde Aufgaben
 Der TM5 Der weltweit erste Kollaborierende Roboter mit eingebautem Kamera- System Perfekt für Industrie 4.0 Höchste Flexibilität und Anpassungsfähigkeit an sich ändernde Aufgaben Äußerst geringe Kosten
Der TM5 Der weltweit erste Kollaborierende Roboter mit eingebautem Kamera- System Perfekt für Industrie 4.0 Höchste Flexibilität und Anpassungsfähigkeit an sich ändernde Aufgaben Äußerst geringe Kosten
c) Am Punkt R( ) ändert das U-Boot seine Fahrtrichtung und fährt in Richtung des Vektors w = 13
 Am Punkt R( ) ändert das U-Boot seine Fahrtrichtung und fährt in Richtung des Vektors w = 13") Lineare Algebra / Analytische Geometrie Grundkurs Aufgabe 9 U-Boot Während einer Forschungsfahrt tritt ein U-Boot am Punkt P(100 0 540) alle Angaben in m in den Überwachungsbereich seines Begleitschiffes
Lineare Algebra / Analytische Geometrie Grundkurs Aufgabe 9 U-Boot Während einer Forschungsfahrt tritt ein U-Boot am Punkt P(100 0 540) alle Angaben in m in den Überwachungsbereich seines Begleitschiffes
Roboterbaureihe TX60 ESD. Industrieroboter 6 Achsen - Elektronikindustrie
 Roboterbaureihe TX60 ESD Industrieroboter 6 Achsen - Elektronikindustrie Roboterprogramm von Vier- und Sechsachsrobotern für nahezu jeden Einsatzbereich Stäubli Roboter sind erste Wahl für jede Branche
Roboterbaureihe TX60 ESD Industrieroboter 6 Achsen - Elektronikindustrie Roboterprogramm von Vier- und Sechsachsrobotern für nahezu jeden Einsatzbereich Stäubli Roboter sind erste Wahl für jede Branche
Roboterbaureihe TX200. Industrieroboter - 6 Achsen
 Roboterbaureihe TX200 Industrieroboter - 6 Achsen Roboterprogramm von Vier- und Sechsachsrobotern für nahezu jeden Einsatzbereich Überall, wo es auf Geschwindigkeit, Genauigkeit oder Zuverlässigkeit ankommt,
Roboterbaureihe TX200 Industrieroboter - 6 Achsen Roboterprogramm von Vier- und Sechsachsrobotern für nahezu jeden Einsatzbereich Überall, wo es auf Geschwindigkeit, Genauigkeit oder Zuverlässigkeit ankommt,
KR AGILUS sixx CR. Robots. Mit W- und C-Variante Spezifikation. KUKA Deutschland GmbH. Stand: Version: Spez KR AGILUS sixx CR V5 KR AGILUS
 Robots KUKA Deutschland GmbH KR AGILUS sixx CR Mit W- und C-Variante Spezifikation KR AGILUS sixx CR Stand: 17.04.2018 Version: Spez KR AGILUS sixx CR V5 Copyright 2018 KUKA Deutschland GmbH Zugspitzstraße
Robots KUKA Deutschland GmbH KR AGILUS sixx CR Mit W- und C-Variante Spezifikation KR AGILUS sixx CR Stand: 17.04.2018 Version: Spez KR AGILUS sixx CR V5 Copyright 2018 KUKA Deutschland GmbH Zugspitzstraße
Die hochdynamischen Linearmotorachsen HL
 Die hochdynamischen Linearmotorachsen HL Die Linearmotorachsen HL bieten kompromisslose, modernste Antriebstechnik hoch integriert und einbaufertig. Kompakte und präzise Kugelumlaufführungen und ein absolutes
Die hochdynamischen Linearmotorachsen HL Die Linearmotorachsen HL bieten kompromisslose, modernste Antriebstechnik hoch integriert und einbaufertig. Kompakte und präzise Kugelumlaufführungen und ein absolutes
Roboterbaureihe TX90 ESD. Industrieroboter 6 Achsen - Elektronikindustrie
 Roboterbaureihe TX90 ESD Industrieroboter 6 Achsen - Elektronikindustrie Roboterprogramm von Vier- und Sechsachsrobotern für nahezu jeden Einsatzbereich Stäubli Roboter sind erste Wahl für jede Branche
Roboterbaureihe TX90 ESD Industrieroboter 6 Achsen - Elektronikindustrie Roboterprogramm von Vier- und Sechsachsrobotern für nahezu jeden Einsatzbereich Stäubli Roboter sind erste Wahl für jede Branche