Bewegungsbefehle. Bewegungsbefehle eines Roboters enthalten folgende Angaben:
|
|
|
- Walter Stein
- vor 7 Jahren
- Abrufe
Transkript
1 Bewegungsbefehle Bewegungsbefehle eines Roboters enthalten folgende Angaben: eine Roboterstellung detaillierte Angaben zu der Bewegung, mit der der die betreffende Roboterstellung angefahren werden soll.

2 Spezifikation der Bewegung Geschwindigkeit / Ausführungszeit Überschleifzone Verwendetes Werkzeug Werkstück-Koordinatensystem auf das sich die Koordinaten beziehen Bahnkorrektur

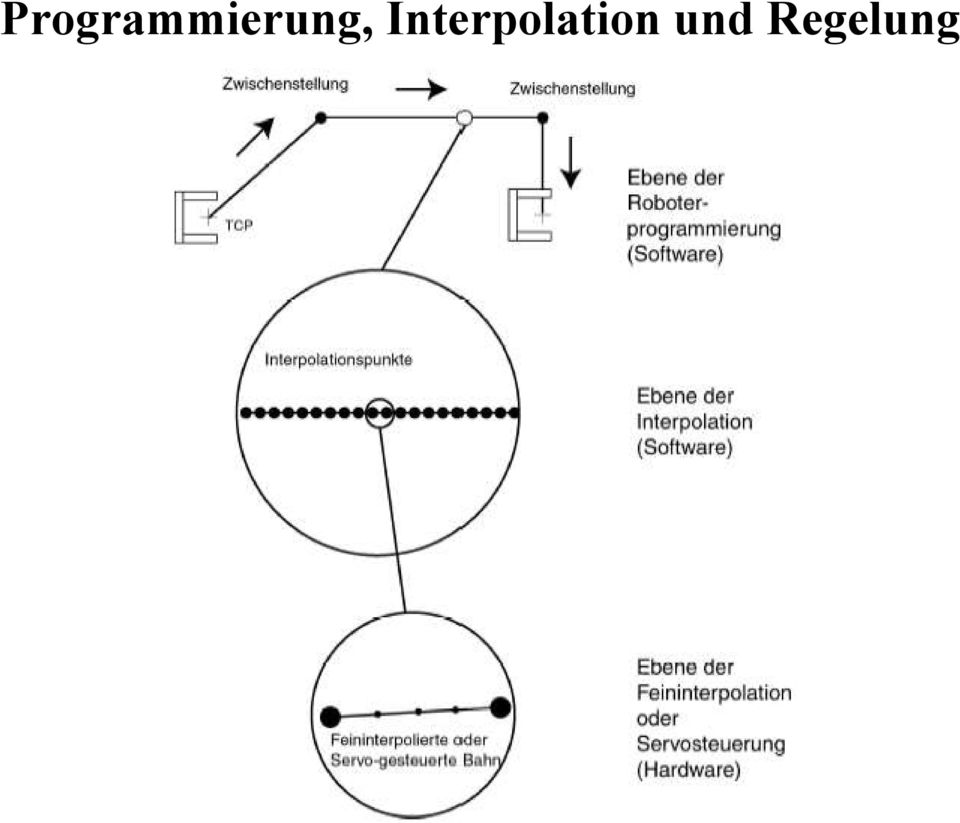
3 Interpolation Um eine bessere Kontrolle über die Bahn zu erhalten, werden von der Steuerung Interpolationspunkte (Zwischenpunkte) eingefügt. Ein Achsrechner berechnet die Stellung der Gelenke in den Interpolationspunkten mit der Rückwärtstransformation. Vom Achsrechner werden die Sollwerte an eine parametrisierbare Regelung übergeben, die die Bewegung der Gelenke letztlich kontrolliert.

4 Programmierung, Interpolation und Regelung
5 Übergabe der Sollwerte an die Servoregler

6 Bahnparameter und Geschwindigkeitsprofil Bahnparameter: Winkel oder Weg, entsprechend Gelenktyp und Steuerungsart. Aufgaben der Steuerung: - Aus dem Stillstand heraus auf konstante Geschwindigkeit bringen oder umgekehrt. - Von einer konstanten Geschwindigkeit auf eine andere konstante Geschwindigkeit bringen

7 Warum Geschwindigkeitsprofile? Gleichmäßige Verteilung der Interpolationspunkte: Hohe Beschleunigungen am Anfang und Ende Folge: Verschleiß, Beschädigungen Werkstücke und Werkzeuge Notwendig: Begrenzung der Beschleunigung, weiche Bewegungen

8 Rampenprofil Die Geschwindigkeit wird linear, d.h. mit konstanter Beschleunigung, erhöht oder erniedrigt, bis der gewünschte Wert erreicht ist. Nachteil: Die Beschleunigung und damit die Kraft ändert sich sprunghaft.

9 Sinuidenprofil Die Beschleunigung wird mit einem sin 2 -Profil weich bis zum Maximalwert gesteigert und fällt dann weich wieder auf Null ab. Dabei ändert sich die Kraft stetig und weich, die Bewegung wird ruckfrei und flüssig.

10 Bahnsteuerungspolynome Man kann für den Bahnparameter ein Steuerungspolynom 4. Ordnung verwenden. Folge: Kräfte werden durch Polynom 2. Ordnung beschrieben, was ebenfalls einen weichen Übergang zwischen zwei beliebigen Geschwindigkeitswerten bewirkt.

11 Punkt-zu-Punkt-Steuerung (1) PTP = point to point control. Nur für den Zielpunkt werden mit der Rückwärtstransformation Gelenkwinkel bestimmt. Mit Interpolationspunkten auf Gelenkwinkelebene kann ein Geschwindigkeitsprofil eingehalten werden. Wird auf Interpolationspunkte ganz verzichtet, entscheiden nur die Servokreise über die Bewegung.

12 Punkt-zu-Punkt-Steuerung (2) Die PTP-Bewegung ist für die Steuerung einfach und problemlos. Der TCP erreicht exakt den Zielpunkt, aber die Bahn ist unkontrolliert und nicht vorhersehbar. Gefahr! Die auftretenden Geschwindigkeiten und Beschleunigungen sind nicht vorhersehbar!

13 Punkt-zu-Punkt-Steuerung (3) PTP-Steuerung ist ungeeignet für: Bewegungen mit Werkstückbearbeitung, Bewegungen in der Nähe von Hindernissen. PTP-Steuerung ist geeignet für: Reine Positionierbewegungen bei genügend freiem Raum um den Arm, um Singularitäten zu umgehen.

14 Punkt-zu-Punkt-Steuerung (4) Varianten: Asynchrone PTP-Steuerung: Die Gelenke werden so schnell wie möglich in die Endstellung gefahren. Folge: Die Achsen beenden nacheinander ihre Bewegung. Synchrone PTP-Steuerung: Die Verfahrzeit der übrigen Achsen werden an die langsamste Achse angepasst, alle Achsen beenden ihre Bewegung glechzeitig.

15 Ermittlung der Interpolationspunkte für synchrone PTP-Steuerung Berechnung der Bewegungsdauer für jedes Gelenk aus Verfahrstrecke, max. Geschwindigkeit und Profil Die Achse mit größter Bewegungsdauer wird Leitachse Die übrigen Achsen werden verlangsamt, bis ihre Bewegungsdauer mit der Leitachse übereinstimmt Vollsynchrone PTP-Steuerung: Beschleunigungsphasen werden an Leitachse angepasst Berechnung der Interpolationspunkte.

16 Kartesische Bahnsteuerung (Continuos Path, CP) (1) Es werden in kurzen Abständen Interpolations-punkte entlang der gewünschten Bahn erzeugt. Für jeden Interpolationspunkt wird die Rückwärtstransformation durchgeführt. Zwischen den Interpolationspunkten findet Feininterpolation oder Servosteuerung statt. Der TCP bewegt sich (fast) exakt auf der gewünschten Bahn.

17 Kartesische Bahnsteuerung (Continuos Path, CP) (2) Hauptvarianten: Lineare CP-Bahn: Der TCP bewegt sich auf einer Geraden. Zirkulare CP-Bahn: Der TCP bewegt sich auf einem Kreisausschnitt.

18 Kartesische Bahnsteuerung (Continuos Path, CP) (3) Die CP-Steuerung wird in der Regel mit einem weichen Geschwindigkeitsprofil kombiniert, das sich dann auf die tatsächliche Geschwindigkeit des TCP auf der Bahn bezieht. Auf der CP-gesteuerten Bahn kann auch eine Umorientierung (Rotation) stattfinden, die synchron zur Fortbewegung (Translation) stattfindet. Eine CP-Bewegung erfordert mehr Gelenkbewegungen und dauert deshalb manchmal länger als eine PTP-Bewegung.
 stattfindet.")
19 Vorgehensweise beim Entwurf einer CP- Bahn 1. Berechnung der Translationsstrecke und der Orientierungsänderung, 2. Berechnung der Bewegungsdauer als das Maximum aus den beiden Bewegungsdauern, 3. Festlegung der Geschwindigkeits- und Beschleunigungswerte, 4. Festlegung der Interpolationspunkte mit Pos. u. Orient., 5. Ermittlung der Gelenkkoordinaten in den Interpolationspunkten durch Rückwärtstransformation, 6. Eintragung der Gelenkkoordinaten in die Sollwerttabelle, von dort Übergabe an die Steuerungshardware, 7. Evtl. Feininterpolation durch die Steuerungshardware, Übergabe an Servokreise, von dort Motoransteuerung.

20 Beispiel für eine lineare CP-Bahn ohne Umorientieng

21 Beispiel für eine lineare CP-Bahn mit Umorientieng
22 Beispiel für eine zirkulare CP-Bahn ohne Umorientierung
23 Beispiel für eine zirkulare CP-Bahn mit Umorientierung
24 Bahnbeispiele für verschiedene Steuerungsarten
25 Praktische Anwendung der CP-Bahnen
26 Durchfahren von Zwischenstellungen ohne Anhalten ( Überschleifen ) Für die Zwischenstellungen einer Bahn gibt es zwei Möglichkeiten: 1. Am Zwischenpunkt ist ein Halt mit Stillstand des Roboters erforderlich. Mögliche Gründe: Warten auf ein Signal, prozessbedingtes Warten, Werkzeugwechsel. 2. Am Zwischenpunkt ist kein Halt erforderlich. Möglich Gründe: Der Zwischenpunkt wurde nur eingefügt, um ein Hindernis zu umgehen, der Prozess erlaubt kleine Bahnabweichungen.
27 Durchfahren von Zwischenstellungen ohne Anhalten, Nutzen Das Durchfahren eines Zwischenpunktes ohne Anhalten vermeidet unnötiges Abbremsen und Beschleunigen, d.h. spart Zeit lässt weniger Kräfte wirken spart Energie Aber: Würde man einen Zwischenpunkt (mit Richtungsänderung) exakt anfahren und ohne Stopp fortsetzen, wäre ein scharfer Ruck die Folge!
28 Fly-By-Punkte, Überschleifzone, Überschleifkugel Überschleifen: Abweichung von exakter Bahn und allmähliches Einschwenken auf die neue Bahn mit flüssiger und weicher Bewegung. Dazu ist Raumzone nötig: Überschleifzone oder Überschleifkugel. Nur die Überschleifzone wird erreicht, nicht der exakte Bahnpunkt! Daher: Fly-By-Punkt. Die Geschwindigkeit wird in der Überschleifzone nicht Null.
29 Beispiel zum Überschleifen Bewegung links ohne und rechts mit Überschleifen.
30 Geschwindigkeits- und Positionsüberschleifen Das Geschwindigkeitsüberschleifen beginnt, wenn die Geschwindigkeit einen festgelegten Minimalwert unterschreitet. Nachteil: Abhängig vom Geschwindigkeitsprofil. Das Positionsüberschleifen beginnt, wenn der TCP in die Überschleifkugel eintritt. Außerhalb der Übrschleifkugel wird die Bahn exakt eingehalten. Vorteil: Gut kontrollierbar für Programmierer.
31 Weitere Details zum Überschleifen Das Überschleifen kann auf Gelenkwinkelebene oder auf CP-Ebene erfolgen Wenn der Zielpunkt nach dem Fly-By-Punkt eine andere Orientierung aufweist erlauben viele Steuerungen eine separate Zone für die Umorientierung. Ein Fly-By-Punkt kann für den Wechsel der Steuerungsart genutzt werden.
32 Beispiel für zwei verschiedene Überschleifkugeln
33 Syntaxbeispiel für linearen Bewegungsbefehle in RAPID MoveJ p1,vmax,z30,zange1 MoveJ = Move Joint = synchrone PTP-Bewegung, Zielstellung p1, Geschwindigkeit vmax (vordefiniert), Überschleifradius z30=30mm, Ziel wird nicht erreicht, TCP kommt nicht zum Stillstand Werkzeug Zange1, Werkzeug-KS von Zange1 erreicht Zielstellung
34 Syntaxbeispiel lineare CP-Bewegung MoveL p2,v100,fine,duese2 MoveL = Move linear = lineare CP-Steuerung, Zielstellung p2, Geschwindigkeit v100, fine = kein Überschleifen, TCP kommt in Zielstellung zum Stillstand Werkzeug Duese2.
35 Syntaxbeispiel zirkulare CP-Bewegung MoveC Kreispunkt,EndPunkt,v500,z10,Dorn MoveC = Move circular = zirkulare CP-Steuerung, Zielstellung EndPunkt, Zwischenpunkt Kreispunkt legt Kreisbogen fest, Geschwindigkeit v500=500mm/s, Überschleifzone z10=10mm, TCP kommt nicht zum Stillstand und erreicht EndPunkt nicht, TCP von Werkzeug Dorn wird benutzt.
Grundlagen der Robotik Klausur am Musterlösung Nachname: Vorname: Matrikelnummer:
 Prof. Dr. K. Wüst SS 202 Fachbereich MNI TH Mittelhessen Grundlagen der Robotik Klausur am 6.7.202 Musterlösung Nachname: Vorname: Matrikelnummer: Aufgabe Punkte erreicht 22 2 22 3 8 4 8 Bonusfrage 0 Summe
Prof. Dr. K. Wüst SS 202 Fachbereich MNI TH Mittelhessen Grundlagen der Robotik Klausur am 6.7.202 Musterlösung Nachname: Vorname: Matrikelnummer: Aufgabe Punkte erreicht 22 2 22 3 8 4 8 Bonusfrage 0 Summe
Klausur Robotik/Steuerungstechnik
 Prof. Dr. K. Wüst SS 2009 Fachbereich MNI FH Gießen-Friedberg Klausur Robotik/Steuerungstechnik 9.7.2009 Nachname: Vorname: Matrikelnummer: Aufgabe Punkte erreicht 1 30 2 30 3 40 4 20 Summe 120 Mit Lösungen
Prof. Dr. K. Wüst SS 2009 Fachbereich MNI FH Gießen-Friedberg Klausur Robotik/Steuerungstechnik 9.7.2009 Nachname: Vorname: Matrikelnummer: Aufgabe Punkte erreicht 1 30 2 30 3 40 4 20 Summe 120 Mit Lösungen
Laborbericht: BPR-Labor. Datum: Dozentin: Prof. Dr. A. Weigl-Seitz
 1/10 vom 19.12.2005 Laborbericht: BPR-Labor Datum: 19.12.2005 Dozentin: Prof. Dr. A. Weigl-Seitz An der Ausarbeitung haben mitgewirkt: Manfred Ludwig (686916), Armin Vahidi (704734) und Bernd Schmitt (687151)
1/10 vom 19.12.2005 Laborbericht: BPR-Labor Datum: 19.12.2005 Dozentin: Prof. Dr. A. Weigl-Seitz An der Ausarbeitung haben mitgewirkt: Manfred Ludwig (686916), Armin Vahidi (704734) und Bernd Schmitt (687151)
Entwicklung einer allgemeinen dynamischen inversen Kinematik
 Entwicklung einer allgemeinen dynamischen inversen Kinematik Christoph Schmiedecke Studiendepartment Informatik Hochschule für Angewandte Wissenschaften Hamburg 06. Januar 2010 Inhaltsverzeichnis 1 Motivation
Entwicklung einer allgemeinen dynamischen inversen Kinematik Christoph Schmiedecke Studiendepartment Informatik Hochschule für Angewandte Wissenschaften Hamburg 06. Januar 2010 Inhaltsverzeichnis 1 Motivation
Gliederung. Gliederung (cont.) Gliederung (cont.)
 Gliederung (cont.)") - Gliederung Jianwei Zhang zhang@informatik.uni-hamburg.de Fakultät für Mathematik, Informatik und Naturwissenschaften Technische Aspekte Multimodaler Systeme 11. Mai 2010 Allgemeine Informationen Einführung
- Gliederung Jianwei Zhang zhang@informatik.uni-hamburg.de Fakultät für Mathematik, Informatik und Naturwissenschaften Technische Aspekte Multimodaler Systeme 11. Mai 2010 Allgemeine Informationen Einführung
Tag X [mm] Y [mm] Z [mm] Rx [ ] Ry [ ] Rz [ ] T T T T
![Tag X [mm] Y [mm] Z [mm] Rx [ ] Ry [ ] Rz [ ] T T T T](/thumbs/53/33060008.jpg "Tag X [mm] Y [mm] Z [mm] Rx [ ] Ry [ ] Rz [ ] T T T T") EASY-ROB Bedienungshinweis Bahnbewegung und Interpolation Zeitverhalten bei verschiedenen Interpolationsarten Die Bahnplanung hat die Aufgabe den Weg im kartesischen Raum vom Startpunkt A zum Zielpunkt
EASY-ROB Bedienungshinweis Bahnbewegung und Interpolation Zeitverhalten bei verschiedenen Interpolationsarten Die Bahnplanung hat die Aufgabe den Weg im kartesischen Raum vom Startpunkt A zum Zielpunkt
Industrieroboter. Methoden der Steuerung und Regelung. Bearbeitet von Wolfgang Weber
 Industrieroboter Methoden der Steuerung und Regelung Bearbeitet von Wolfgang Weber 1. Auflage 2002. Taschenbuch. 220 S. Paperback ISBN 978 3 446 21604 4 Format (B x L): 16 x 22,8 cm Gewicht: 403 g Weitere
Industrieroboter Methoden der Steuerung und Regelung Bearbeitet von Wolfgang Weber 1. Auflage 2002. Taschenbuch. 220 S. Paperback ISBN 978 3 446 21604 4 Format (B x L): 16 x 22,8 cm Gewicht: 403 g Weitere
Übung 1: Homogene Transformationen
 Übung 1: Homogene Transformationen Aufgabe 1.1: Bestimmen Sie die homogene Transformationsmatri für die folgende Sequenz von Rotationen: T 1 =Rot z,90 Rot,90 und T 2 =Rot,90 Rot z,90 Zeichnen Sie die entsprechenden
Übung 1: Homogene Transformationen Aufgabe 1.1: Bestimmen Sie die homogene Transformationsmatri für die folgende Sequenz von Rotationen: T 1 =Rot z,90 Rot,90 und T 2 =Rot,90 Rot z,90 Zeichnen Sie die entsprechenden
Special Week 1617 Zeichenmaschinen. (Gelenkarm-) Roboter. Tags
 Roboter. Tags") Special Week 1617 Zeichenmaschinen (Gelenkarm-) Roboter Tags 1 Tags: Linien, keine Flächen Tags: Blockschrift mit Schatten 2 L u f t Düse Airbrush Roboter was ist das? Antike 19. Jhrdt.: Roboter als menschenähnliches
Special Week 1617 Zeichenmaschinen (Gelenkarm-) Roboter Tags 1 Tags: Linien, keine Flächen Tags: Blockschrift mit Schatten 2 L u f t Düse Airbrush Roboter was ist das? Antike 19. Jhrdt.: Roboter als menschenähnliches
Einführung in die Robotik. Jianwei Zhang
 - Jianwei Zhang zhang@informatik.uni-hamburg.de Fakultät für Mathematik, Informatik und Naturwissenschaften Technische Aspekte Multimodaler Systeme 19. April 2011 J. Zhang 63 Gliederung Allgemeine Informationen
- Jianwei Zhang zhang@informatik.uni-hamburg.de Fakultät für Mathematik, Informatik und Naturwissenschaften Technische Aspekte Multimodaler Systeme 19. April 2011 J. Zhang 63 Gliederung Allgemeine Informationen
Grundlagen der Robotik
 Modul II 2004 im Studiengang BSc Ingenieur-Informatik Grundlagen der Robotik Prof. Dr. Klaus Wüst Skriptum Stand: 30. Juni 2014 Autor: K.Wüst Inhaltsverzeichnis 1. Kurze Einführung in die Automatisierung
Modul II 2004 im Studiengang BSc Ingenieur-Informatik Grundlagen der Robotik Prof. Dr. Klaus Wüst Skriptum Stand: 30. Juni 2014 Autor: K.Wüst Inhaltsverzeichnis 1. Kurze Einführung in die Automatisierung
Verfahren der Bewegungsplanung zur Energieminimierung bei Maschinen und Robotern
 Verfahren der Bewegungsplanung zur Energieminimierung bei Maschinen und Robotern Motivation Produktion in der Automobilindustrie: ca. 49% der elektrischen Energie wird von Industrierobotern benötigt davon
Verfahren der Bewegungsplanung zur Energieminimierung bei Maschinen und Robotern Motivation Produktion in der Automobilindustrie: ca. 49% der elektrischen Energie wird von Industrierobotern benötigt davon
Einführung in die Robotik. Jianwei Zhang
 - Jianwei Zhang zhang@informatik.uni-hamburg.de Fakultät für Mathematik, Informatik und Naturwissenschaften Technische Aspekte Multimodaler Systeme 20. April 2010 J. Zhang 63 Gliederung Allgemeine Informationen
- Jianwei Zhang zhang@informatik.uni-hamburg.de Fakultät für Mathematik, Informatik und Naturwissenschaften Technische Aspekte Multimodaler Systeme 20. April 2010 J. Zhang 63 Gliederung Allgemeine Informationen
Bewegungssteuerung und Programmierung von Robotersystemen. Klausur
 Fachhochschule Darmstadt Fachbereich Elektrotechnik und Informationstechnik Prof. Dr.-Ing. A. Weigl-Seit ewegungssteuerung und Programmierung von Robotersstemen Klausur 1. Februar 2006 10:15 11:45 Uhr
Fachhochschule Darmstadt Fachbereich Elektrotechnik und Informationstechnik Prof. Dr.-Ing. A. Weigl-Seit ewegungssteuerung und Programmierung von Robotersstemen Klausur 1. Februar 2006 10:15 11:45 Uhr
Zusammenhang zwischen durchschnittlicher Geschwindigkeit und Verbrauch l/100km?
 Zusammenhang zwischen durchschnittlicher Geschwindigkeit und Verbrauch l/100km? Weil mich die Frage interessiert, ob es diesen Zusammenhang gibt und wie stark er tatsächlich ist, führe ich einigermaßen
Zusammenhang zwischen durchschnittlicher Geschwindigkeit und Verbrauch l/100km? Weil mich die Frage interessiert, ob es diesen Zusammenhang gibt und wie stark er tatsächlich ist, führe ich einigermaßen
Möglichkeiten der Bewegungssteuerung von Industrierobotern und deren softwareseitige Umsetzbarkeit. Seminararbeit von Daniel Ast Matr.-Nr.
 Möglichkeiten der Bewegungssteuerung von Industrierobotern und deren softwareseitige Umsetzbarkeit Seminararbeit von Daniel Ast Matr.-Nr.: 841121 14. Dezember 2012 Betreuer: Prof. Dr. Gerhard Dikta Dipl.-Inform.
Möglichkeiten der Bewegungssteuerung von Industrierobotern und deren softwareseitige Umsetzbarkeit Seminararbeit von Daniel Ast Matr.-Nr.: 841121 14. Dezember 2012 Betreuer: Prof. Dr. Gerhard Dikta Dipl.-Inform.
Fachhochschule Bochum Institut für Werkzeugmaschinen und Roboter Seite 1 von 12
 Filename: S700_6.TXT Stand: 10. Januar 1996 Einführung: Dieses Kapitel vermittelt Ihnen praktische Kenntnisse über die Bewegungsanweisungen, die Bewegungsarten und die verschiedenen Möglichkeiten, Bewegungen
Filename: S700_6.TXT Stand: 10. Januar 1996 Einführung: Dieses Kapitel vermittelt Ihnen praktische Kenntnisse über die Bewegungsanweisungen, die Bewegungsarten und die verschiedenen Möglichkeiten, Bewegungen
1. Grundlagen der ebenen Kinematik
 Lage: Die Lage eines starren Körpers in der Ebene ist durch die Angabe von zwei Punkten A und P eindeutig festgelegt. Die Lage eines beliebigen Punktes P wird durch Polarkoordinaten bezüglich des Bezugspunktes
Lage: Die Lage eines starren Körpers in der Ebene ist durch die Angabe von zwei Punkten A und P eindeutig festgelegt. Die Lage eines beliebigen Punktes P wird durch Polarkoordinaten bezüglich des Bezugspunktes
Gliederung. Gliederung (cont.) Kinematik-Gleichungen - (1) Allgemeine Informationen Einführung Koordinaten eines Manipulators. Kinematik-Gleichungen
 Kinematik-Gleichungen - (1) Allgemeine Informationen Einführung Koordinaten eines Manipulators. Kinematik-Gleichungen") - Gliederung Jianwei Zhang zhang@informatik.uni-hamburg.de Fakultät für Mathematik, Informatik und Naturwissenschaften Technische Aspekte Multimodaler Systeme 20. April 2010 Allgemeine Informationen Einführung
- Gliederung Jianwei Zhang zhang@informatik.uni-hamburg.de Fakultät für Mathematik, Informatik und Naturwissenschaften Technische Aspekte Multimodaler Systeme 20. April 2010 Allgemeine Informationen Einführung
WI-05 Projekt Mobile Agenten Protokoll
 Zeit: - 13.03.2007-14.03.2007 - Martin Schaldach,Lei Zhu - Roboter zusammen bauren - erst Tests durchfueren Vorgehensweise: - BrixCC installieren - Linierkennung programmieren - Lichtsensoren programmieren
Zeit: - 13.03.2007-14.03.2007 - Martin Schaldach,Lei Zhu - Roboter zusammen bauren - erst Tests durchfueren Vorgehensweise: - BrixCC installieren - Linierkennung programmieren - Lichtsensoren programmieren
Interpolation und Approximation
 Interpolation und Approximation Fakultät Grundlagen Mai 2006 Fakultät Grundlagen Interpolation und Approximation Übersicht 1 Problemstellung Polynominterpolation 2 Kubische Fakultät Grundlagen Interpolation
Interpolation und Approximation Fakultät Grundlagen Mai 2006 Fakultät Grundlagen Interpolation und Approximation Übersicht 1 Problemstellung Polynominterpolation 2 Kubische Fakultät Grundlagen Interpolation
Hindernisumfahrung eines autonomen Roboters in einer unbekannten statischen Umgebung. Ronny Menzel
 Hindernisumfahrung eines autonomen Roboters in einer unbekannten statischen Umgebung. Ronny Menzel Inhalt Aufgabenstellung Begriffserklärung Hindernisumfahrungsstrategien Anforderungen an die Hindernisumfahrung
Hindernisumfahrung eines autonomen Roboters in einer unbekannten statischen Umgebung. Ronny Menzel Inhalt Aufgabenstellung Begriffserklärung Hindernisumfahrungsstrategien Anforderungen an die Hindernisumfahrung
AW 1 - Vortrag. Simulationsmodell für visuell geführte Roboter. von Bernd Pohlmann. Betreuender: Prof. Dr. Andreas Meisel
 AW 1 - Vortrag Simulationsmodell für visuell geführte Roboter von Betreuender: Prof. Dr. Andreas Meisel Inhalt 1. Motivation 2. Ziel 3. Einführung Robotik 4. Kinematik 5. Denavit-Hartenberg 6. Kameramodell
AW 1 - Vortrag Simulationsmodell für visuell geführte Roboter von Betreuender: Prof. Dr. Andreas Meisel Inhalt 1. Motivation 2. Ziel 3. Einführung Robotik 4. Kinematik 5. Denavit-Hartenberg 6. Kameramodell
Skript Teil 10: Massenberechnung
 Prof. Dr. techn. Alfred Mischke Vorlesung zur Veranstaltung Vermessungskunde Skript Teil 0: Massenberechnung Ein wesentlicher Kostenfaktor bei nahezu allen Baumaßnahmen ist der Transport der Erdmassen.
Prof. Dr. techn. Alfred Mischke Vorlesung zur Veranstaltung Vermessungskunde Skript Teil 0: Massenberechnung Ein wesentlicher Kostenfaktor bei nahezu allen Baumaßnahmen ist der Transport der Erdmassen.
Ein Fahrzeug ohne eigenen Antrieb startet auf der abgebildeten Bahn von dem Punkt (1) und fährt reibungsfrei über den Punkt (2) zum Punkt (3).
 und fährt reibungsfrei über den Punkt (2) zum Punkt (3).") Achterbahn Ein Fahrzeug ohne eigenen Antrieb startet auf der abgebildeten Bahn von dem Punkt (1) und fährt reibungsfrei über den Punkt (2) zum Punkt (3). a) Warum bewegt sich das Fahrzeug? sidee b) Welche
Achterbahn Ein Fahrzeug ohne eigenen Antrieb startet auf der abgebildeten Bahn von dem Punkt (1) und fährt reibungsfrei über den Punkt (2) zum Punkt (3). a) Warum bewegt sich das Fahrzeug? sidee b) Welche
Vektoren. Kapitel 3. 3.1 Skalare, Vektoren, Tensoren. 3.2 Vektoren
 Kapitel 3 Vektoren 31 Skalare, Vektoren, Tensoren Viele physikalische Größen lassen sich bei bekannter Maßeinheit durch Angabe ihres Betrages als reelle Zahl vollständig angeben Solche Größen nennt man
Kapitel 3 Vektoren 31 Skalare, Vektoren, Tensoren Viele physikalische Größen lassen sich bei bekannter Maßeinheit durch Angabe ihres Betrages als reelle Zahl vollständig angeben Solche Größen nennt man
10. Versuch: Schiefe Ebene
 Physikpraktikum für Pharmazeuten Universität Regensburg Fakultät Physik 10. Versuch: Schiefe Ebene In diesem Versuch untersuchen Sie Mechanik der schiefen Ebene, indem Sie mithilfe dem statischen und dynamischen
Physikpraktikum für Pharmazeuten Universität Regensburg Fakultät Physik 10. Versuch: Schiefe Ebene In diesem Versuch untersuchen Sie Mechanik der schiefen Ebene, indem Sie mithilfe dem statischen und dynamischen
Wie berechnet man eine Planetenbahn?
 Wie berechnet man eine Planetenbahn? Das Programm Doppelstern.exe macht das iterativ, das heißt, die einzelnen Bahnpunkte werden Schritt für Schritt in einer Endlosschleife berechnet. Dazu denkt man sich
Wie berechnet man eine Planetenbahn? Das Programm Doppelstern.exe macht das iterativ, das heißt, die einzelnen Bahnpunkte werden Schritt für Schritt in einer Endlosschleife berechnet. Dazu denkt man sich
Nullpunkte und Nullpunktverschiebungen
 Begriffsdefinitionen Maschinen-Nullpunkt M Der Maschinen-Nullpunkt ist der Nullpunkt des Maschinen-Koordinatensystems. Er wird vom Maschinenhersteller festgelegt und ist Ausgangspunkt für alle weiteren
Begriffsdefinitionen Maschinen-Nullpunkt M Der Maschinen-Nullpunkt ist der Nullpunkt des Maschinen-Koordinatensystems. Er wird vom Maschinenhersteller festgelegt und ist Ausgangspunkt für alle weiteren
Trainingssysteme für die Robotik. Mit den Schulungsrobotern auf leichte und verständliche Weise komplexe Themen der Robotik vermitteln
 Trainingssysteme für die Robotik Mit den Schulungsrobotern auf leichte und verständliche Weise komplexe Themen der Robotik vermitteln Automatisierungstechnik Trainingssysteme für die Robotik Der Start
Trainingssysteme für die Robotik Mit den Schulungsrobotern auf leichte und verständliche Weise komplexe Themen der Robotik vermitteln Automatisierungstechnik Trainingssysteme für die Robotik Der Start
Feldbacher Markus Manipulationstechnik Kinematik. Kinetik. (Bewegungslehre) Mechanik Lehre von der Bewegung von Körpern
 Mechanik Lehre von der Bewegung von Körpern") Kinematik (Bewegungslehre) Mechanik Lehre von der Bewegung von Körpern Kinematik Lehre von den geo- Metrischen Bewegungsverhältnissen von Körpern. Dynamik Lehre von den Kräften Kinetik Lehre von den Bewegungen
Kinematik (Bewegungslehre) Mechanik Lehre von der Bewegung von Körpern Kinematik Lehre von den geo- Metrischen Bewegungsverhältnissen von Körpern. Dynamik Lehre von den Kräften Kinetik Lehre von den Bewegungen
Kinematik ================================================================== 1. Zeit-Ort-Diagramm geradliniger Bewegungen
 Kinematik ================================================================== 1. Zeit-Ort-Diagramm geradliniger Bewegungen Bewegt sich ein Körper geradlinig, dann kann mit einem Zeit-Ort-Diagramm dargestellt
Kinematik ================================================================== 1. Zeit-Ort-Diagramm geradliniger Bewegungen Bewegt sich ein Körper geradlinig, dann kann mit einem Zeit-Ort-Diagramm dargestellt
Radiuskorrektur 4. Ergänzung für Spezielle Steuerung. Anfahren mit der Radiuskorrektur
 Radiuskorrektur 4 Ergänzung für Spezielle Steuerung Anfahren mit der Radiuskorrektur Im ersten Teil wurde die Verhaltensweise der Radiuskorrektur während der Bearbeitung an einer Kontur beschrieben. Und
Radiuskorrektur 4 Ergänzung für Spezielle Steuerung Anfahren mit der Radiuskorrektur Im ersten Teil wurde die Verhaltensweise der Radiuskorrektur während der Bearbeitung an einer Kontur beschrieben. Und
Lineare Abbildungen. De nition Seien V, W Vektorräume. Eine Abbildung f : V! W heißt linear, wenn gilt
 Lineare Abbildungen Lineare Abbildungen De nition Seien V, W Vektorräume. Eine Abbildung f : V! W heißt linear, wenn gilt (L. ) f ist homogen; d.h. f( ~v) = f(~v) für alle 2 R, ~v 2 V, (L. ) f ist additiv;
Lineare Abbildungen Lineare Abbildungen De nition Seien V, W Vektorräume. Eine Abbildung f : V! W heißt linear, wenn gilt (L. ) f ist homogen; d.h. f( ~v) = f(~v) für alle 2 R, ~v 2 V, (L. ) f ist additiv;
Lösungen zu den Aufgaben
 Lösungen zu den Aufgaben Kapitel Aufgabe.3. Es gilt für die Z-Y-X-Euler-Winkel: A=, B = 3, C = 9 (s. Bild L). Es wird zwar in negativer y -Richtung gedreht, aber nach Definition auf S. 34 ist das negative
Lösungen zu den Aufgaben Kapitel Aufgabe.3. Es gilt für die Z-Y-X-Euler-Winkel: A=, B = 3, C = 9 (s. Bild L). Es wird zwar in negativer y -Richtung gedreht, aber nach Definition auf S. 34 ist das negative
Klausur Physik 1 (GPH1) am 8.7.02
 am 8.7.02") Name, Matrikelnummer: Klausur Physik 1 (GPH1) am 8.7.02 Fachbereich Elektrotechnik und Informatik, Fachbereich Mechatronik und Maschinenbau Zugelassene Hilfsmittel: Beiblätter zur Vorlesung Physik 1 im
Name, Matrikelnummer: Klausur Physik 1 (GPH1) am 8.7.02 Fachbereich Elektrotechnik und Informatik, Fachbereich Mechatronik und Maschinenbau Zugelassene Hilfsmittel: Beiblätter zur Vorlesung Physik 1 im
einer Raumkurve, wobei t als Zeitparameter interpretiert wird. w( t ) beschreibt also den kinematischen Kurvendurchlauf (κ ι ν ε µ α = Bewegung).
 beschreibt also den kinematischen Kurvendurchlauf (κ ι ν ε µ α = Bewegung).") 10.4. Raumkurven Kinematik Wir betrachten eine zweimal differenzierbare Parameterdarstellung w( t) x( t ) y( t ) z( t ) einer Raumkurve, wobei t als Zeitparameter interpretiert wird. w( t ) beschreibt
10.4. Raumkurven Kinematik Wir betrachten eine zweimal differenzierbare Parameterdarstellung w( t) x( t ) y( t ) z( t ) einer Raumkurve, wobei t als Zeitparameter interpretiert wird. w( t ) beschreibt
Serielle Datenübertragung mit dem Schnittstellenbaustein 8251
 Serielle Datenübertragung mit dem Schnittstellenbaustein 8251 2 Inhaltsverzeichnis Thema Seite Inhaltsverzeichnis 2 Einleitung 2 Serielle Datenübertragung 3 Der serielle Schnittstellenbaustein 8251 4 Beispielprogramm
Serielle Datenübertragung mit dem Schnittstellenbaustein 8251 2 Inhaltsverzeichnis Thema Seite Inhaltsverzeichnis 2 Einleitung 2 Serielle Datenübertragung 3 Der serielle Schnittstellenbaustein 8251 4 Beispielprogramm
LAF Mathematik. Näherungsweises Berechnen von Nullstellen von Funktionen
 LAF Mathematik Näherungsweises Berechnen von Nullstellen von Funktionen von Holger Langlotz Jahrgangsstufe 12, 2002/2003 Halbjahr 12.1 Fachlehrer: Endres Inhalt 1. Vorkenntnisse 1.1 Nicht abbrechende Dezimalzahlen;
LAF Mathematik Näherungsweises Berechnen von Nullstellen von Funktionen von Holger Langlotz Jahrgangsstufe 12, 2002/2003 Halbjahr 12.1 Fachlehrer: Endres Inhalt 1. Vorkenntnisse 1.1 Nicht abbrechende Dezimalzahlen;
Gleichgewicht am Punkt
 Gleichgewicht am Punkt 3.1 Gleichgewichtsbedingung für einen Massenpunkt.. 52 3.2 Freikörperbild................................... 52 3.3 Ebene Kräftesysteme............................ 55 3.4 Räumliche
Gleichgewicht am Punkt 3.1 Gleichgewichtsbedingung für einen Massenpunkt.. 52 3.2 Freikörperbild................................... 52 3.3 Ebene Kräftesysteme............................ 55 3.4 Räumliche
2. Kinematik Mechanische Bewegung. Zusammenfassung. Vorlesung. Übungen
 Lehr- und Lernmaterial / Physik für M-Kurse am Landesstudienkolleg Halle / Jörg Thurm 2. Kinematik Physikalische Grundlagen Vorlesung 2.1. Mechanische Bewegung Zusammenfassung 1. Semester / 2. Thema /
Lehr- und Lernmaterial / Physik für M-Kurse am Landesstudienkolleg Halle / Jörg Thurm 2. Kinematik Physikalische Grundlagen Vorlesung 2.1. Mechanische Bewegung Zusammenfassung 1. Semester / 2. Thema /
 Übungen zu Experimentalphysik 4 - Lösungsvorschläge Prof. S. Paul Sommersemester 005 Dr. Jan Friedrich Nr. 5 16.05.005 Email Jan.Friedrich@ph.tum.de Telefon 089/89-1586 Physik Department E18, Raum 3564
Übungen zu Experimentalphysik 4 - Lösungsvorschläge Prof. S. Paul Sommersemester 005 Dr. Jan Friedrich Nr. 5 16.05.005 Email Jan.Friedrich@ph.tum.de Telefon 089/89-1586 Physik Department E18, Raum 3564
Aufgaben zum Thema Kraft
 Aufgaben zum Thema Kraft 1. Ein Seil ist mit einem Ende an einem Pfeiler befestigt und wird reibungsfrei über einen weiteren Pfeiler derselben Höhe im Abstand von 20 m geführt. Das andere Seilende ist
Aufgaben zum Thema Kraft 1. Ein Seil ist mit einem Ende an einem Pfeiler befestigt und wird reibungsfrei über einen weiteren Pfeiler derselben Höhe im Abstand von 20 m geführt. Das andere Seilende ist
Radgetriebene Systeme
 Radgetriebene Systeme Mobilität, Räder Räder benötigen weniger Energie und erlauben eine schnellere Fortbewegung (auf entsprechendem Terrain) Benötigen Kinematische Gleichungen, d.h. Beschreibungen wie
Radgetriebene Systeme Mobilität, Räder Räder benötigen weniger Energie und erlauben eine schnellere Fortbewegung (auf entsprechendem Terrain) Benötigen Kinematische Gleichungen, d.h. Beschreibungen wie
Was versteht man unter Bewegung?
 Bewegungen Was versteht man unter Bewegung? Beobachten: Beschreiben: Ortsveränderung in einer bestimmten Zeit Messen: Objektivierte Darstellung durch Vergleiche mit allgemein gültigen Standards: Längenmaß,
Bewegungen Was versteht man unter Bewegung? Beobachten: Beschreiben: Ortsveränderung in einer bestimmten Zeit Messen: Objektivierte Darstellung durch Vergleiche mit allgemein gültigen Standards: Längenmaß,
Vorwärtskinematik und inverse Kinematik. Andreas Schmidtke
 Vorwärtskinematik und inverse Kinematik Andreas Schmidtke Übersicht 1. Vorwärtskinematik 2. Standardframes 3. Inverse Kinematik 4. Bemerkungen zur Numerik Übersicht 1. Vorwärtskinematik 1. Modellierung
Vorwärtskinematik und inverse Kinematik Andreas Schmidtke Übersicht 1. Vorwärtskinematik 2. Standardframes 3. Inverse Kinematik 4. Bemerkungen zur Numerik Übersicht 1. Vorwärtskinematik 1. Modellierung
2. Lagrange-Gleichungen
 2. Lagrange-Gleichungen Mit dem Prinzip der virtuellen Leistung lassen sich die Bewegungsgleichungen für komplexe Systeme einfach aufstellen. Aus dem Prinzip der virtuellen Leistung lassen sich die Lagrange-Gleichungen
2. Lagrange-Gleichungen Mit dem Prinzip der virtuellen Leistung lassen sich die Bewegungsgleichungen für komplexe Systeme einfach aufstellen. Aus dem Prinzip der virtuellen Leistung lassen sich die Lagrange-Gleichungen
Lösungen und Hinweise zu den Arbeitsaufträgen, Heimversuchen und Aufgaben
 Bewegungen S. 181 196 Aufträge S. 183 Lösungen und Hinweise zu den Arbeitsaufträgen, Heimversuchen und Aufgaben A1 Siehe Schülerband, S. 183, B1 (Bewegungsarten) und S. 18, B5 (Bewegungsformen). A Individuelle
Bewegungen S. 181 196 Aufträge S. 183 Lösungen und Hinweise zu den Arbeitsaufträgen, Heimversuchen und Aufgaben A1 Siehe Schülerband, S. 183, B1 (Bewegungsarten) und S. 18, B5 (Bewegungsformen). A Individuelle
Einweisung in Off-line-Programmierübung mit dem ABB- Roboter YuMi (Irb14000)
") Einweisung in Off-line-Programmierübung mit dem ABB- Roboter YuMi (Irb14000) Roboter Yumi Irb14000 (ABB) Kenndaten: kollaborativer zweiarmiger Roboter je Arm 7 Achsen Nennlast 500g abzüglich der Hände:
Einweisung in Off-line-Programmierübung mit dem ABB- Roboter YuMi (Irb14000) Roboter Yumi Irb14000 (ABB) Kenndaten: kollaborativer zweiarmiger Roboter je Arm 7 Achsen Nennlast 500g abzüglich der Hände:
2010-03-08 Klausur 3 Kurs 12Ph3g Physik
 00-03-08 Klausur 3 Kurs Ph3g Physik Lösung Ein Federpendel mit der Federkonstante D=50 N schwingt mit derselben Frequenz wie ein m Fadenpendel der Länge 30 cm. Die Feder sei masselos. Die Auslenkung des
00-03-08 Klausur 3 Kurs Ph3g Physik Lösung Ein Federpendel mit der Federkonstante D=50 N schwingt mit derselben Frequenz wie ein m Fadenpendel der Länge 30 cm. Die Feder sei masselos. Die Auslenkung des
Bachelorarbeit. Andreas Dubs Entwicklung einer industriellen Robotersteuerung mit Trajektorienplanung
 Bachelorarbeit Andreas Dubs Entwicklung einer industriellen Robotersteuerung mit Trajektorienplanung Fakultät Technik und Informatik Department Informatik Faculty of Engineering and Computer Science Department
Bachelorarbeit Andreas Dubs Entwicklung einer industriellen Robotersteuerung mit Trajektorienplanung Fakultät Technik und Informatik Department Informatik Faculty of Engineering and Computer Science Department
Vektoren - Die Basis
 Vektoren - Die Basis Motivation (Als Vereinfachung - der Schreibarbeit - wählen wir meistens Vektoren in R 2.) Eigentlich ist ja Alles klar! Für einen Vektor a gilt a = ( a x a y )! Am Ende werden wir
Vektoren - Die Basis Motivation (Als Vereinfachung - der Schreibarbeit - wählen wir meistens Vektoren in R 2.) Eigentlich ist ja Alles klar! Für einen Vektor a gilt a = ( a x a y )! Am Ende werden wir
Software-Tools. CamBuilder
 2 Bosch Rexroth AG Electric Drives and Controls Dokumentation Anwendungsbeschreibung einfaches Erstellen von Kurvenscheiben mit Hilfe grafischer Objekte Verwendung von Bewegungsgesetzen nach VDI 2143 Umschaltung
2 Bosch Rexroth AG Electric Drives and Controls Dokumentation Anwendungsbeschreibung einfaches Erstellen von Kurvenscheiben mit Hilfe grafischer Objekte Verwendung von Bewegungsgesetzen nach VDI 2143 Umschaltung
imh-engineering V1.2
 USBCNC V4.0 Software ist im Lieferumfang der CNC Steuerung Die USBCNC Software ist leicht zu bedienen, hat aber gleichwohl eine leistungsfähige Benutzeroberfläche, die alle Maschinenfunktionen zur Verfügung
USBCNC V4.0 Software ist im Lieferumfang der CNC Steuerung Die USBCNC Software ist leicht zu bedienen, hat aber gleichwohl eine leistungsfähige Benutzeroberfläche, die alle Maschinenfunktionen zur Verfügung
2D - Strömungssimulation einer dreiblättrigen Vertikalachs-Windkraftanlage
 2D - Strömungssimulation einer dreiblättrigen Vertikalachs-Windkraftanlage Inhalt: 1 Einleitung 3 2 Technische Daten 4 3 Geometrie unter PRO Engineer 5 4 Vernetzung der Geometrie 9 5 Simulation des stationären
2D - Strömungssimulation einer dreiblättrigen Vertikalachs-Windkraftanlage Inhalt: 1 Einleitung 3 2 Technische Daten 4 3 Geometrie unter PRO Engineer 5 4 Vernetzung der Geometrie 9 5 Simulation des stationären
Optimierung. 1. Grundlegendes Beim PID-Regler müssen 3 Parameter optimal eingestellt werden: Proportionalbeiwert, Nachstellzeit und Vorhaltezeit.
 FELJC Optimierung_Theorie.odt Optimierung. Grundlegendes Beim PID-Regler müssen 3 Parameter optimal eingestellt werden: Proportionalbeiwert, Nachstellzeit und Vorhaltezeit. Hierzu gibt es unterschiedliche
FELJC Optimierung_Theorie.odt Optimierung. Grundlegendes Beim PID-Regler müssen 3 Parameter optimal eingestellt werden: Proportionalbeiwert, Nachstellzeit und Vorhaltezeit. Hierzu gibt es unterschiedliche
3. Isoparametrische Elemente
 3. Isoparametrische lemente Mit dem einfachen Rechteckelement lassen sich nur Probleme mit einer sehr einfachen Geometrie berechnen. Vielseitigere lemente lassen sich formulieren, wenn neben den Verschiebungen
3. Isoparametrische lemente Mit dem einfachen Rechteckelement lassen sich nur Probleme mit einer sehr einfachen Geometrie berechnen. Vielseitigere lemente lassen sich formulieren, wenn neben den Verschiebungen
Das Wort Vektor kommt aus dem lateinischen und heißt so viel wie "Träger" oder "Fahrer".
 Was ist ein Vektor? Das Wort Vektor kommt aus dem lateinischen und heißt so viel wie "Träger" oder "Fahrer". Vektoren sind Listen von Zahlen. Man kann einen Vektor darstellen, indem man seine Komponenten
Was ist ein Vektor? Das Wort Vektor kommt aus dem lateinischen und heißt so viel wie "Träger" oder "Fahrer". Vektoren sind Listen von Zahlen. Man kann einen Vektor darstellen, indem man seine Komponenten
Fräsen ohne Radiuskorrektur Mit Berechnung der Fräsermittelpunktsbahn
 Fräsen ohne Radiuskorrektur Mit Berechnung der Fräsermittelpunktsbahn Wer mit einer Uralt-NC oder einer Eigenbausteuerung arbeitet, kann oft nicht auf die Fräserradiuskorrektur G41 / G42 zurück greifen
Fräsen ohne Radiuskorrektur Mit Berechnung der Fräsermittelpunktsbahn Wer mit einer Uralt-NC oder einer Eigenbausteuerung arbeitet, kann oft nicht auf die Fräserradiuskorrektur G41 / G42 zurück greifen
151. Eine Uhr braucht 6 Sekunden, um,,6" zu schlagen. Wieviel Sekunden braucht sie, um,,12" zu schlagen?
 Kinematik Gleichförmige und beschleunigte geradlinige Bewegung 145. Ein LKW legt insgesamt 120 km zurück, davon 90 km mit v 1 = 40 km/h und 30 km mit v 2 = 60 km/h. Wie lange dauert die Fahrt einschliesslich
Kinematik Gleichförmige und beschleunigte geradlinige Bewegung 145. Ein LKW legt insgesamt 120 km zurück, davon 90 km mit v 1 = 40 km/h und 30 km mit v 2 = 60 km/h. Wie lange dauert die Fahrt einschliesslich
Kreissektoren und Bogenmaß
 M 10.1 Kreissektoren und Bogenmaß In einem Kreis mit Radius Mittelpunktswinkel : Länge des Kreisbogens gilt für einen Kreissektor mit Fläche des Kreissektors Das Bogenmaß eines Winkels ist die Länge des
M 10.1 Kreissektoren und Bogenmaß In einem Kreis mit Radius Mittelpunktswinkel : Länge des Kreisbogens gilt für einen Kreissektor mit Fläche des Kreissektors Das Bogenmaß eines Winkels ist die Länge des
Android: Property Animation
 Prof. Dr. Carsten Vogt,, Mar. 2015 Carsten Vogt,, 2015. Android: Property Animation Techniken für Fortgeschrittene Prof. Dr. Carsten Vogt Prof. Dr. Carsten Vogt,, Mar. 2015 Carsten Vogt,, 2015. Android:
Prof. Dr. Carsten Vogt,, Mar. 2015 Carsten Vogt,, 2015. Android: Property Animation Techniken für Fortgeschrittene Prof. Dr. Carsten Vogt Prof. Dr. Carsten Vogt,, Mar. 2015 Carsten Vogt,, 2015. Android:
Lösung II Veröffentlicht:
 1 Momentane Bewegung I Die Position eines Teilchens auf der x-achse, ist gegeben durch x = 3m 30(m/s)t + 2(m/s 3 )t 3, wobei x in Metern und t in Sekunden angeben wird (a) Die Position des Teilchens bei
1 Momentane Bewegung I Die Position eines Teilchens auf der x-achse, ist gegeben durch x = 3m 30(m/s)t + 2(m/s 3 )t 3, wobei x in Metern und t in Sekunden angeben wird (a) Die Position des Teilchens bei
Grundlagen der CNC-Programmierung
 Lernsituation 1 Kapitel 1 1.1 Absolutbemaßung/ Inkrementalbemaßung 1 17 Bei der Koordinatenangabe der Punkte, auf die das Werkzeug verfahren soll, haben Sie grundsätzlich zwei verschiedene Möglichkeiten:
Lernsituation 1 Kapitel 1 1.1 Absolutbemaßung/ Inkrementalbemaßung 1 17 Bei der Koordinatenangabe der Punkte, auf die das Werkzeug verfahren soll, haben Sie grundsätzlich zwei verschiedene Möglichkeiten:
Die Festlegung der Koordinatensysteme gemäß Denavit-Hartenberg-Konventionen
 1 Die Festlegung der Koordinatensysteme gemäß Denavit-Hartenberg-Konventionen 1. Nummerierung die Armteile Der festgeschraubte Fuß ist Armteil 0, das erste drehbare Armteil ist Armteil 1 usw. Das letzte
1 Die Festlegung der Koordinatensysteme gemäß Denavit-Hartenberg-Konventionen 1. Nummerierung die Armteile Der festgeschraubte Fuß ist Armteil 0, das erste drehbare Armteil ist Armteil 1 usw. Das letzte
2 Gleichmässig beschleunigte Bewegung
 2 Gleichmässig beschleunigte Bewegung Ziele dieses Kapitels Du kennst die Definition der Grösse Beschleunigung. Du kannst die gleichmässig beschleunigte Bewegung im v-t- und s-t-diagramm darstellen. Du
2 Gleichmässig beschleunigte Bewegung Ziele dieses Kapitels Du kennst die Definition der Grösse Beschleunigung. Du kannst die gleichmässig beschleunigte Bewegung im v-t- und s-t-diagramm darstellen. Du
Kinematik eines Massenpunktes
 12 Kinematik eines Massenpunktes Technische Mechanik Kinematik eines Massenpunktes http://wikipedia.org Relevanz von Dynamik in der Freizeit Beschleunigung: 0-172km/h in 1.8s Technische Mechanik Kinematik
12 Kinematik eines Massenpunktes Technische Mechanik Kinematik eines Massenpunktes http://wikipedia.org Relevanz von Dynamik in der Freizeit Beschleunigung: 0-172km/h in 1.8s Technische Mechanik Kinematik
1 Ein Roboter darf keinem Menschen verletzen oder diurch Unterlassung die Verletzung eines Menschen hervorrufen
 Robotik Vorbereitung Asimov s Robotergesetze 1 Ein Roboter darf keinem Menschen verletzen oder diurch Unterlassung die Verletzung eines Menschen hervorrufen 2 Roboter muß Anweisungen Menschen gehorchen,
Robotik Vorbereitung Asimov s Robotergesetze 1 Ein Roboter darf keinem Menschen verletzen oder diurch Unterlassung die Verletzung eines Menschen hervorrufen 2 Roboter muß Anweisungen Menschen gehorchen,
TEIL 13: DIE LINEARE REGRESSION
 TEIL 13: DIE LINEARE REGRESSION Dozent: Dawid Bekalarczyk GLIEDERUNG Dozent: Dawid Bekalarczyk Lineare Regression Grundlagen Prognosen / Schätzungen Verbindung zwischen Prognose und Zusammenhang zwischen
TEIL 13: DIE LINEARE REGRESSION Dozent: Dawid Bekalarczyk GLIEDERUNG Dozent: Dawid Bekalarczyk Lineare Regression Grundlagen Prognosen / Schätzungen Verbindung zwischen Prognose und Zusammenhang zwischen
G1 Kreisprogrammierung beim Fräsen
 G1 Kreisprogrammierung beim Fräsen 1.2 Angaben im Programmsatz Zur eindeutigen Festlegung eines Kreisbogens (Bild 1) sind folgende Angaben erforderlich: die Ebene der Kreisinterpolation, der Drehsinn des
G1 Kreisprogrammierung beim Fräsen 1.2 Angaben im Programmsatz Zur eindeutigen Festlegung eines Kreisbogens (Bild 1) sind folgende Angaben erforderlich: die Ebene der Kreisinterpolation, der Drehsinn des
Exemplar für Prüfer/innen
 Exemplar für Prüfer/innen Kompensationsprüfung zur standardisierten kompetenzorientierten schriftlichen Reifeprüfung AHS Juni 2015 Mathematik Kompensationsprüfung Angabe für Prüfer/innen Hinweise zur Kompensationsprüfung
Exemplar für Prüfer/innen Kompensationsprüfung zur standardisierten kompetenzorientierten schriftlichen Reifeprüfung AHS Juni 2015 Mathematik Kompensationsprüfung Angabe für Prüfer/innen Hinweise zur Kompensationsprüfung
7 WERKZEUGKORREKTUR. 7.1 Eingabe der Korrekturtabelle aus dem Part-Programm
 7 WERKZEUGKORREKTUR Die Werkzeugkorrektur erlaubt die Erstellung eines allgemeinen Part-Programms, das für verschiedene Durchmesser- bzw. Werkzeuglängen-Werte eingesetzt werden kann. Man unterscheidet
7 WERKZEUGKORREKTUR Die Werkzeugkorrektur erlaubt die Erstellung eines allgemeinen Part-Programms, das für verschiedene Durchmesser- bzw. Werkzeuglängen-Werte eingesetzt werden kann. Man unterscheidet
Kurzanleitung So geht s MDT Jalousieaktoren. Grundfunktionen Rollladen
 Stand 10/2013 Kurzanleitung So geht s MDT Jalousieaktoren JAL-0206.01 JAL-0410.01 JAL-0810.01 JAL-0410D.01 JAL-0810D.01 JAL-0410A.01 JAL-01UP.01 Grundfunktionen Rollladen Stand 11/2013 Unterlagen erstellt
Stand 10/2013 Kurzanleitung So geht s MDT Jalousieaktoren JAL-0206.01 JAL-0410.01 JAL-0810.01 JAL-0410D.01 JAL-0810D.01 JAL-0410A.01 JAL-01UP.01 Grundfunktionen Rollladen Stand 11/2013 Unterlagen erstellt
TEIL 13: DIE EINFACHE LINEARE REGRESSION
 TEIL 13: DIE EINFACHE LINEARE REGRESSION Die einfache lineare Regression Grundlagen Die einfache lineare Regression ist ebenfalls den bivariaten Verfahren für metrische Daten zuzuordnen 1 Sie hat einen
TEIL 13: DIE EINFACHE LINEARE REGRESSION Die einfache lineare Regression Grundlagen Die einfache lineare Regression ist ebenfalls den bivariaten Verfahren für metrische Daten zuzuordnen 1 Sie hat einen
3.2 Das physikalische Pendel (Körperpendel)
") 18 3 Pendelschwingungen 32 Das physikalische Pendel (Körperpendel) Ein starrer Körper (Masse m, Schwerpunkt S, Massenträgheitsmoment J 0 ) ist um eine horizontale Achse durch 0 frei drehbar gelagert (Bild
18 3 Pendelschwingungen 32 Das physikalische Pendel (Körperpendel) Ein starrer Körper (Masse m, Schwerpunkt S, Massenträgheitsmoment J 0 ) ist um eine horizontale Achse durch 0 frei drehbar gelagert (Bild
Transformation Allgemeines Die Lage eines Punktes kann durch einen Ortsvektor (ausgehend vom Ursprung des Koordinatensystems
 Transformation - 1 1. Allgemeines 2. Zwei durch eine Translation verknüpfte gleichartige Basissysteme 3. Zwei durch eine Translation verknüpfte verschiedenartige Basissysteme (noch gleiche Orientierung)
Transformation - 1 1. Allgemeines 2. Zwei durch eine Translation verknüpfte gleichartige Basissysteme 3. Zwei durch eine Translation verknüpfte verschiedenartige Basissysteme (noch gleiche Orientierung)
Hexamove Testing System PRJ00099
 Hexamove Testing System PRJ00099 Kräfte in 6 Freiheitsgraden Messen und Regeln Hohe Kräfte und Momente Hohe Präzision Programmierbar auf beliebigen Bezugspunkt Technology of Switzerland Einleitung Wie
Hexamove Testing System PRJ00099 Kräfte in 6 Freiheitsgraden Messen und Regeln Hohe Kräfte und Momente Hohe Präzision Programmierbar auf beliebigen Bezugspunkt Technology of Switzerland Einleitung Wie
5.4. KINETISCHE ENERGIE EINES STARREN KÖRPERS 203. Abbildung 5.12: Koordinaten zur Berechnung der kinetischen Energie (siehe Diskussion im Text)
") 5.4. KINETISCHE ENERGIE EINES STARREN KÖRPERS 03 ρ α r α R Abbildung 5.1: Koordinaten zur Berechnung der kinetischen Energie (siehe Diskussion im Text) 5.4 Kinetische Energie eines Starren Körpers In diesem
5.4. KINETISCHE ENERGIE EINES STARREN KÖRPERS 03 ρ α r α R Abbildung 5.1: Koordinaten zur Berechnung der kinetischen Energie (siehe Diskussion im Text) 5.4 Kinetische Energie eines Starren Körpers In diesem
Bedienung von Youtube über TV-Bildschirm
 Bedienung von Youtube über TV-Bildschirm Lupe Dies ist die Startseite, diese wird jedes Mal anders aussehen (andere Inhalte haben), meistens in Verbindung auf den vorher getätigten Suchen). Diese Inhalte
Bedienung von Youtube über TV-Bildschirm Lupe Dies ist die Startseite, diese wird jedes Mal anders aussehen (andere Inhalte haben), meistens in Verbindung auf den vorher getätigten Suchen). Diese Inhalte
Mathematischer Vorkurs für Physiker WS 2011/12 Vorlesung 3
 TU München Prof. P. Vogl Mathematischer Vorkurs für Physiker WS 2011/12 Vorlesung 3 Differenziation und Integration von Vektorfunktionen Der Ortsvektor: Man kann einen Punkt P im Raum eindeutig durch die
TU München Prof. P. Vogl Mathematischer Vorkurs für Physiker WS 2011/12 Vorlesung 3 Differenziation und Integration von Vektorfunktionen Der Ortsvektor: Man kann einen Punkt P im Raum eindeutig durch die
4 Roboterkinematik. Roboterarm und Gelenke
 4 Roboterkinematik Roboterarm und Gelenke 4.1 Grundlegende Begriffe Mechanismus besteht aus einer Anzahl von starren Körpern (Glieder diese sind durch Gelenke verbunden Ein Gelenk verbindet genau zwei
4 Roboterkinematik Roboterarm und Gelenke 4.1 Grundlegende Begriffe Mechanismus besteht aus einer Anzahl von starren Körpern (Glieder diese sind durch Gelenke verbunden Ein Gelenk verbindet genau zwei
Grundbegriffe zur Beschreibung von Kreisbewegungen
 Arbeitsanleitung I Kreisbewegung Grundbegriffe zur Beschreibung von Kreisbewegungen Beschreibung der Kreisbewegung 1 1.1 Das Bogenmass 1.2 Begriffe zur Kreisbewegung 1.3 Die Bewegung auf dem Kreis Lösungen
Arbeitsanleitung I Kreisbewegung Grundbegriffe zur Beschreibung von Kreisbewegungen Beschreibung der Kreisbewegung 1 1.1 Das Bogenmass 1.2 Begriffe zur Kreisbewegung 1.3 Die Bewegung auf dem Kreis Lösungen
2. Lagrange-Gleichungen
 2. Lagrange-Gleichungen Mit dem Prinzip der virtuellen Leistung lassen sich die Bewegungsgleichungen für komplexe Systeme einfach aufstellen. Aus dem Prinzip der virtuellen Leistung lassen sich die Lagrange-Gleichungen
2. Lagrange-Gleichungen Mit dem Prinzip der virtuellen Leistung lassen sich die Bewegungsgleichungen für komplexe Systeme einfach aufstellen. Aus dem Prinzip der virtuellen Leistung lassen sich die Lagrange-Gleichungen
1 Mathematische Grundlagen der Robotik
 Robotik - Formelsammlung (powered by LTEX) Seite von 8 Mathematische Grundlagen der Robotik. TI Taschenrechner Befehle [x, x ; x, x ] [ x x ] x x [...] Inverse Matrix [...] (ND CTLOG) T Transponierte Matrix
Robotik - Formelsammlung (powered by LTEX) Seite von 8 Mathematische Grundlagen der Robotik. TI Taschenrechner Befehle [x, x ; x, x ] [ x x ] x x [...] Inverse Matrix [...] (ND CTLOG) T Transponierte Matrix
Geschichte. Zum ersten Einsatz eines Industrieroboter (Unimate) kam es dann im Jahr 1961 bei General Motors in einer Produktionslinie.
 kam es dann im Jahr 1961 bei General Motors in einer Produktionslinie.") Industrieroboter Geschichte Die ersten Industrieroboter waren in der Reaktortechnik zu suchen, wobei diese noch handgesteuert waren. Für den ersten wirklichen programmierbaren Industrieroboter der Welt
Industrieroboter Geschichte Die ersten Industrieroboter waren in der Reaktortechnik zu suchen, wobei diese noch handgesteuert waren. Für den ersten wirklichen programmierbaren Industrieroboter der Welt
CNC-Programmierung mit. SchulCNC. 1Programmierheft für Schüler
 CNC-Programmierung mit SchulCNC 1Programmierheft für Schüler schule\technik\schulcnc\programmheft für Schüler.vp tamer berber februar 2000 2 CNC-Programmierung mit Bezugspunkte und -größen im Koordinatensystem
CNC-Programmierung mit SchulCNC 1Programmierheft für Schüler schule\technik\schulcnc\programmheft für Schüler.vp tamer berber februar 2000 2 CNC-Programmierung mit Bezugspunkte und -größen im Koordinatensystem
M 10.1. Kreissektoren und Bogenmaß
 M 10.1 Kreissektoren und Bogenmaß Wie berechnet man in einem Kreis mit Radius die Länge des Kreisbogens für einen Kreissektor mit Mittelpunktswinkel? Wie berechnet man in einem Kreis mit Radius den Flächeninhalt
M 10.1 Kreissektoren und Bogenmaß Wie berechnet man in einem Kreis mit Radius die Länge des Kreisbogens für einen Kreissektor mit Mittelpunktswinkel? Wie berechnet man in einem Kreis mit Radius den Flächeninhalt
M 10.1. Kreissektoren und Bogenmaß
 M 10.1 Kreissektoren und Bogenmaß Wie berechnet man in einem Kreis mit Radius die Länge des Kreisbogens für einen Kreissektor mit Mittelpunktswinkel? Wie berechnet man in einem Kreis mit Radius den Flächeninhalt
M 10.1 Kreissektoren und Bogenmaß Wie berechnet man in einem Kreis mit Radius die Länge des Kreisbogens für einen Kreissektor mit Mittelpunktswinkel? Wie berechnet man in einem Kreis mit Radius den Flächeninhalt
Implementierung des Scan-Matching-Algorithmus MbICP im Fach Mensch-Maschine- Kommunikation/Robotik
 Implementierung des Scan-Matching-Algorithmus MbICP im Fach Mensch-Maschine- Kommunikation/Robotik Betreuer: Dipl.-Inf. (FH) Peter Poschmann Enrico Uhlig, Markus Fischer, Marcus Kupke 26. Jun 2012 1 Gliederung
Implementierung des Scan-Matching-Algorithmus MbICP im Fach Mensch-Maschine- Kommunikation/Robotik Betreuer: Dipl.-Inf. (FH) Peter Poschmann Enrico Uhlig, Markus Fischer, Marcus Kupke 26. Jun 2012 1 Gliederung
geschlossene Schachtel mit einem kleinen Loch
 Kameramodellierung Lochkamera Kamerakonstante Kamerazentrum geschlossene Schachtel mit einem kleinen Loch ideale Kamera: Loch hat keine Ausdehnung die Strahlen sind ein Büschel von Geraden Abbildung erfolgt
Kameramodellierung Lochkamera Kamerakonstante Kamerazentrum geschlossene Schachtel mit einem kleinen Loch ideale Kamera: Loch hat keine Ausdehnung die Strahlen sind ein Büschel von Geraden Abbildung erfolgt
Aufgaben zu elektrischen und magnetischen Feldern (aus dem WWW) a) Feldstärke E b) magnetische Flussdichte B
 a) Feldstärke E b) magnetische Flussdichte B") Aufgabe 73 (Elektrizitätslehre, Lorentzkraft) Elektronen treten mit der Geschwindigkeit 2,0 10 5 m in ein homogenes elektrisches Feld ein s und durchlaufen es auf einer Strecke von s = 20 cm. Die Polung
Aufgabe 73 (Elektrizitätslehre, Lorentzkraft) Elektronen treten mit der Geschwindigkeit 2,0 10 5 m in ein homogenes elektrisches Feld ein s und durchlaufen es auf einer Strecke von s = 20 cm. Die Polung
Ziel: Beschreibung der unterschiedlichen Gelenktypen und deren Einfluss auf die Bewegung der Körper
 Kinematik Gelenkkinematik Ziel: Beschreibung der unterschiedlichen Gelenktypen und deren Einfluss auf die Bewegung der Körper Definition: Ein (kinematisches) Gelenk ist eine Verbindung zwischen zwei Segmenten,
Kinematik Gelenkkinematik Ziel: Beschreibung der unterschiedlichen Gelenktypen und deren Einfluss auf die Bewegung der Körper Definition: Ein (kinematisches) Gelenk ist eine Verbindung zwischen zwei Segmenten,
Prüfung WS 2006/07. Robotik
 Prüfung WS 26/7 Robotik Anmerkungen: Aufgabenblätter auf Vollständigkeit überprüfen Nur Blätter mit Namen und Matr.Nr. werden korrigiert. Keine rote Farbe verwenden. Zu jeder Lösung Aufgabennummer angeben.
Prüfung WS 26/7 Robotik Anmerkungen: Aufgabenblätter auf Vollständigkeit überprüfen Nur Blätter mit Namen und Matr.Nr. werden korrigiert. Keine rote Farbe verwenden. Zu jeder Lösung Aufgabennummer angeben.
Ferienkurs Experimentalphysik 1
 Ferienkurs Experimentalphysik 1 1 Fakultät für Physik Technische Universität München Bernd Kohler & Daniel Singh Blatt 2 WS 2014/2015 24.03.2015 Ferienkurs Experimentalphysik 1 ( ) - leicht ( ) - mittel
Ferienkurs Experimentalphysik 1 1 Fakultät für Physik Technische Universität München Bernd Kohler & Daniel Singh Blatt 2 WS 2014/2015 24.03.2015 Ferienkurs Experimentalphysik 1 ( ) - leicht ( ) - mittel
Lösungen zu den Aufgaben
 Lösungen zu den Aufgaben Kapitel Aufgabe.3. Es gilt für die Z-Y-X-Euler-Winkel: A, B 3, C 9(s. Bild L). Bild L: Euler-Winkel mit Zwischenergebnis Die zu den Drehungen gehörenden Rotationsmatrizen nach
Lösungen zu den Aufgaben Kapitel Aufgabe.3. Es gilt für die Z-Y-X-Euler-Winkel: A, B 3, C 9(s. Bild L). Bild L: Euler-Winkel mit Zwischenergebnis Die zu den Drehungen gehörenden Rotationsmatrizen nach
Traincontroller Einmessen Tutorial TC 9.0 (A2)
") Einmessen von Loks (Traincontroller Handbuch V9/2017 Seite 133ff) Damit Traincontroller eine Lok korrekt und optimal steuern kann, muss das Programm die Lok und deren Eigenschaften kennen lernen. Dies
Einmessen von Loks (Traincontroller Handbuch V9/2017 Seite 133ff) Damit Traincontroller eine Lok korrekt und optimal steuern kann, muss das Programm die Lok und deren Eigenschaften kennen lernen. Dies
Trassierung. c Roolfs
 -6-5 - - - 5 x Modellieren Sie mit einem knickfreien Übergang den Verlauf einer Umgehungsstraße, die durch P(0 ) verlaufen soll (Angaben in km). Ermitteln Sie den kürzesten Abstand zum Ortsrand. -6-5 -
-6-5 - - - 5 x Modellieren Sie mit einem knickfreien Übergang den Verlauf einer Umgehungsstraße, die durch P(0 ) verlaufen soll (Angaben in km). Ermitteln Sie den kürzesten Abstand zum Ortsrand. -6-5 -
Wozu braucht man Geometrie? Kreisumfang
 Wozu braucht man Geometrie? Kreisumfang Roberta-Experiment mit dem LEGO Mindstorms NXT Roberta ist ein eingetragenes Warenzeichen der Fraunhofer-Gesellschaft e.v. Roberta ist seit 2010 Mitglied der Fraunhofer
Wozu braucht man Geometrie? Kreisumfang Roberta-Experiment mit dem LEGO Mindstorms NXT Roberta ist ein eingetragenes Warenzeichen der Fraunhofer-Gesellschaft e.v. Roberta ist seit 2010 Mitglied der Fraunhofer
4.9 Der starre Körper
 4.9 Der starre Körper Unter einem starren Körper versteht man ein physikalische Modell von einem Körper der nicht verformbar ist. Es erfolgt eine Idealisierung durch die Annahme, das zwei beliebig Punkte
4.9 Der starre Körper Unter einem starren Körper versteht man ein physikalische Modell von einem Körper der nicht verformbar ist. Es erfolgt eine Idealisierung durch die Annahme, das zwei beliebig Punkte