Ziel: Beschreibung der unterschiedlichen Gelenktypen und deren Einfluss auf die Bewegung der Körper
|
|
|
- Hansl Meyer
- vor 5 Jahren
- Abrufe
Transkript
1 Kinematik
2 Gelenkkinematik Ziel: Beschreibung der unterschiedlichen Gelenktypen und deren Einfluss auf die Bewegung der Körper Definition: Ein (kinematisches) Gelenk ist eine Verbindung zwischen zwei Segmenten, die die relative Bewegung der beiden Segmente einschränkt Idealisierungen: 1. Idealisierte Körper Perfekt starre Körper (keine Deformierung) Ideale Kontaktflächen Ideale Form 2. Ideale Gelenke Kein Spiel in den Gelenken Keine Flexibilität Man spricht von lower pair joints (Kontaktflächen) und higher pair joints (Kontaktpunkte oder Kontaktlinien)
3 Lower pair joints Man kann beweisen, dass es nur sechs verschieden Arten von lower pair joints gibt. Diese sind: 1. Rotatorisches Gelenk 2. Prismatisches Gelenk 3. Spiralgelenk 4. Zylindrisches Gelenk 5. Kugelförmiges Gelenk 6. Planares Gelenk
4 Rotationsgelenk (revolute joint) Wird mit R abgekürzt und oft auch als hinge joint (Scharniergelenk) bezeichnet (1 Degree of Freedom) Erlaubt die Rotation eines Segments um eine Achse des anderen Segments Rotationsmatrix 1 c s c A 1 Positionsvektor A
 Rotationsmatrix 1 1 @ 1 A 1")
5 Prismatisches Gelenk (prismatic joint) Wird mit P abgekürzt und auch sliding joint genannt (Lineares Gelenk) Erlaubt die Translation eines Segments relativ zu einem andere Segment entlang nur einer Achse (1 DOF) Rotationsmatrix 1 1 A 1 Positionsvektor d A


6 Revolute & prismatic joint Beispiele
 Alle Gelenke mit mehr als 1 DOF kann man aus 1 DOF Gelenken zusammensetzen Rotationsmatrix 1 c s @ s c A 1 Positionsvektor 1 @ d")
7 Zylindrische Gelenk (cylindrical joint) Wird mit C abgekürzt und erlaubt die Translation unabhängig von der Rotation um eine Achse (2 DOF) Alle Gelenke mit mehr als 1 DOF kann man aus 1 DOF Gelenken zusammensetzen Rotationsmatrix 1 c s c A 1 Positionsvektor d A
.")
8 Spiralgelenk (helical joint) Wird mit H abgekürzt und auch als screw joint (Schraubengelenk) bezeichnet Die Rotation um θ ist direkt verbunden mit der Translation d (1 DOF). Es gilt d=hθ, h Gewindesteigung (pitch) Rotationsmatrix 1 c s c A 1 Positionsvektor h A

9 orthogonale Kugelgelenk (spherical joint) orthogonale Wird mit S abgekürzt und erlaubt die Rotation um jede beliebige Achse (3 DOF) Kann z.b. durch 3 orthogonale, rotatorische Gelenke realisiert werden Rotationsmatrix 1 r 11 r 12 r r 21 r 22 r 23 A r 31 r 32 r 33 Positionsvektor A
 Kann z.b.")

10 Planares Gelenk (planar joint) Gelenkt zwischen zwei planar aufeinander liegenden Flächen (3 DOF) Kann z.b. durch drei rotatorische Gelenke mit parallelen Achsen erzeugt werden Rotationsmatrix 1 c s c A 1 Positionsvektor 1 c d x s d s d x +c d y A
11 Higher Pair Joint 6DOF Joint Erlaubt die Rotation und Translation unabhängig um jede Achse Wird benutzt um ein Gelenk zwischen zwei Segmenten zu modellieren, die nicht mit einander verbunden sind Dies wird bei der Modellierung von kinematischen Ketten benötigt Rotationsmatrix 1 r 11 r 12 r r 21 r 22 r 23 A r 31 r 32 r 33 Positionsvektor 1 d d y A d z Jetzt haben wir alles was wir brauchen um die Geometrie eines beliebigen Roboters zu beschreiben

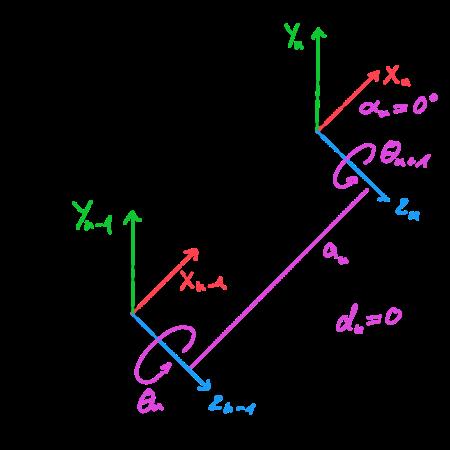
12 Geometrischen Beschreibung eine Roboters Allgemein braucht zur Beschreibung von N Körpern 6N Variablen Durch Konvention und Regeln lassen sich diese auf 4N reduzieren Die am häufigsten verwendete ist die Denavit-Hartenberg Konvention Alle Gelenktypen werden durch revolute und prismatic joints modelliert Die vier Parameter sind: 1. a Segmentlänge 2. α Segmentwinkel 3. d Gelenkoffset 4. θ Gelenkwinkel

 - Y-Achsen folgen der")
13 Denavit-Hartenberg Regeln Schritt 1: Nummerierung - Segmente erhalten Nummern von 1 bin n - Die Basis erhält die Nummer - Gelenk n verbindet Segment n-1 mit Segment n Schritt 2: Koordinatensysteme festlegen - Koordinatensystem der Basis in Gelenk 1 und parallel zum Weltkoordinatensystem - Koordinatensystem des Segments n nah an Gelenkt n+1 Schritt 3: Gelenkachsen festlegen - Z-Achsen sind die Gelenkachsen - X-Achsen verbinden die Z-Achsen (Kreuzprodukt) - Y-Achsen folgen der Rechte-Hand-Regel
14 Denavit-Hartenberg Nummerierung

15 Denavit-Hartenberg Z-Achsen festlegen Z-Achsen sind die Gelenkachsen des folgenden Gelenks
16 Denavit-Hartenberg X-Achsen Z-Achsen sind die Gelenkachsen des folgenden Gelenks X-Achsen verbinden die Z- Achsen
17 Denavit-Hartenberg Y-Achsen Z-Achsen sind die Gelenkachsen des folgenden Gelenks X-Achsen verbinden die Z- Achsen Y-Achsen finden man durch die Rechte-Hand-Regel
18 Denavit-Hartenberg Distanzen Z-Achsen sind die Gelenkachsen des folgenden Gelenks X-Achsen verbinden die Z- Achsen Im Buch werden unterschiedliche Notation verwendet Y-Achsen finden man durch die Rechte-Hand-Regel Gemeinsame Normale: Parameter festlegen x i = z i 1 z i
19 Denavit-Hartenberg Schritt 4 Die Transformation von Gelenk i-1 zu Gelenk i kann nun bestimmt werden durch: A i ( i, d i, i, a i ) = Rot(z i, i )Trans(z i, d i )Trans(x i, a i )Rot(x i, i ) 1 1 c i s i 1 = B s i c i C B d i A 1 1 = 1 a i C A 1 c i s i s i c i 1 c i s i c i s i s i a i c i s i c i c i c i s i a i s i s i c i d i 1 1 C A 1 C A

20 Denavit-Hartenberg Beispiel Segment ai αi di θi 1 a1 θ1 A 1 = A 2 = 2 a2 θ2 c 1 s 1 a 1 c 1 s 1 c 1 a 1 s c 2 s 2 a 2 c 2 s 2 c 2 a 2 s C A 1 C A T 1 = A 1 T 2 = A 1 A 2 = c 12 s 12 c 2 s 1 c 1 s 2 a 1 c 1 + a 2 c 12 a 2 s 12 c 2 s 1 +c 1 s 2 c 12 s 12 a 1 s 1 + a 2 c 2 s 1 + a 2 c 1 s C A


21 a Segmentlänge α Segmentwinkel d Gelenkoffset θ Gelenkwinkel




22 a Segmentlänge α Segmentwinkel d Gelenkoffset θ Gelenkwinkel




23 a Segmentlänge α Segmentwinkel d Gelenkoffset θ Gelenkwinkel




24 a Segmentlänge α Segmentwinkel d Gelenkoffset θ Gelenkwinkel
25 Julia Code Beispiele Freie Software für numerisches Rechnen Grosse, sehr aktive Community MATLAB-ähnlicher Syntax, fast C++ Geschwindigkeit (Faktor 2) Learn Julia in Y Minutes: GIT Repository für die Vorlesung: JuliaBox

26 Julia Box 8 CPUs 6 GB RAM 5 MB Storage Sessions: 4 Stunden Synchronisation über Google Drive & Github Vollwertige Konsole (Linux)
27 JuliaBox
28 JuliaBox

29 JuliaBox

30 Direkte Kinematik / Vorwärtskinematik
31 Direkte Kinematik / Vorwärtskinematik
32 Direkte Kinematik (Vorwärtskinematik) & Inverse Kinematik Direkte Kinematik (Forward kinematics) Gegeben: Parameter θ aller Gelenke Ziel: Bestimmen der Pose des Endeffektors Siehe vorheriges Beispiel Inverse Kinematik (Inverse kinematics) Gegeben: Position des Endeffektors Ziel: Bestimmen der Parameter aller Gelenke
33 Inverse Kinematik Problemstellung: Wir wollen mit dem Endeffektor eine vorgegebene Position erreichen und benötigen die Gelenkparameter θi für jedes Gelenk Lösungswege: 1. Analytische Verfahren (closed-form solutions) 2. Numerische Verfahren Definition: Arbeitsbereich (Workspace) Alle Positionen, die der Endeffektor erreichen kann
 = x L cos( 1 )= a2 2 L 2 + a 2 2 2a 1 L")
34 Beispiel für eine analytisches Verfahren 2 Probleme: 1. Die Lösung ist spezifisch für einen Roboter 2. Nicht praktikabel für komplexe Systeme L = p x 2 + y 2 L 1 L 2 apple L apple L 1 + L 2 cos( ) = x L cos( 1 )= a2 2 L 2 + a 2 2 2a 1 L cos( 2 )= L2 a 2 1 a 2 2 2a 1 a 2
35 Inverse Kinematik Jacobian e Position des Ende ektors Alle Gelenkparameter e = f ( ) Vorwärtskinematik = f 1 (e) InverseKinematik Jacobi-Matrix (Ableitung in einem Punkt) 1 e x e x e x J = e 1 2 m = e y e y e y 1 2 m C e z e z e z A 1 2 m Änderung der Parameter um die Position in die gewünschte Richtung zu ändern = J 1 e =(J T J) 1 J T e [Moore-Penrose pseudo inverse] 2 Probleme: 1. Nicht immer lösbar 2. Sehr teuer zu berechnen
36 Inverse Kinematik Jacobian e Position des Ende ektors Alle Gelenkparameter e = f ( ) Vorwärtskinematik = f 1 (e) InverseKinematik Jacobi-Matrix (Ableitung in einem Punkt) 1 e x e x e x J = e 1 2 m = e y e y e y 1 2 m C e z e z e z A 1 2 m Änderung der Parameter um die Position in die gewünschte Richtung zu ändern = J 1 e =(J T J) 1 J T e [Moore-Penrose pseudo inverse] 2 Probleme: 1. Nicht immer lösbar 2. Sehr teuer zu berechnen
37 Inverse Kinematik Jacobi-Matrix
38 Inverse Kinematik Jacobian


39 Cyclic Coordinate Descent (CCD) Der Positionsfehler des Endeffektors wird schrittweise pro Gelenk reduziert Mit dem Skalarprodukt erhält man den Korrekturwinkel für das Gelenk Mit dem Kreuzprodukt erhält man die Richtung der Korrektur a b = a b cos a b a 2 b 3 a 3 b 2 a 3 b 1 a 1 b 3 a 1 b 2 a 2 b 1 1 A
40 Cyclic Coordinate Descent (CCD) Algorithmus (2D) z Zielposition e aktuelle Ende ektorposition repeat for all Gelenke, angefangen beim Ende ektor do p aktuelle Position des Gelenks e aktuelle Ende ektorposition c = e p t = z p Normalisiere c und t cos = c t if cos < 1. then k = t c if k.z > then c.orientierung.z = c.orientierung.z else c.orientierung.z = c.orientierung.z + end if end if end for until z e < "
41 Inverse Kinematik Cyclic Coordinate Descent
42
43 Inverse Kinematik Cyclic Coordinate Descent
 https://www.youtube.")

44 Cyclic Coordinate Descent (CCD)
Einführung in die Robotik. Jianwei Zhang
 - Jianwei Zhang zhang@informatik.uni-hamburg.de Fakultät für Mathematik, Informatik und Naturwissenschaften Technische Aspekte Multimodaler Systeme 19. April 2011 J. Zhang 63 Gliederung Allgemeine Informationen
- Jianwei Zhang zhang@informatik.uni-hamburg.de Fakultät für Mathematik, Informatik und Naturwissenschaften Technische Aspekte Multimodaler Systeme 19. April 2011 J. Zhang 63 Gliederung Allgemeine Informationen
Vorwärtskinematik und inverse Kinematik. Andreas Schmidtke
 Vorwärtskinematik und inverse Kinematik Andreas Schmidtke Übersicht 1. Vorwärtskinematik 2. Standardframes 3. Inverse Kinematik 4. Bemerkungen zur Numerik Übersicht 1. Vorwärtskinematik 1. Modellierung
Vorwärtskinematik und inverse Kinematik Andreas Schmidtke Übersicht 1. Vorwärtskinematik 2. Standardframes 3. Inverse Kinematik 4. Bemerkungen zur Numerik Übersicht 1. Vorwärtskinematik 1. Modellierung
Inverse Kinematik. Daniela Steidl TU München Zusammenfassung
 Inverse Kinematik Daniela Steidl TU München 10. 07. 2011 Zusammenfassung Sowohl in Computer Graphik als auch in der Robotik werden häufig Simulationen von Mehrkörpersystemen benötigt. Dazu gibt man die
Inverse Kinematik Daniela Steidl TU München 10. 07. 2011 Zusammenfassung Sowohl in Computer Graphik als auch in der Robotik werden häufig Simulationen von Mehrkörpersystemen benötigt. Dazu gibt man die
Was ist Robotik? Robotik heute:
 Grundlagen Was ist Robotik? Das Wort Robot / Roboter entstand 92 in einer Geschichte von Karel Ċapek und geht auf das tschechische Wort robota (rbeit, Fronarbeit) zurück. Dessen Ursprung ist das altkirchenslawische
Grundlagen Was ist Robotik? Das Wort Robot / Roboter entstand 92 in einer Geschichte von Karel Ċapek und geht auf das tschechische Wort robota (rbeit, Fronarbeit) zurück. Dessen Ursprung ist das altkirchenslawische
Die Festlegung der Koordinatensysteme gemäß Denavit-Hartenberg-Konventionen
 1 Die Festlegung der Koordinatensysteme gemäß Denavit-Hartenberg-Konventionen 1. Nummerierung die Armteile Der festgeschraubte Fuß ist Armteil 0, das erste drehbare Armteil ist Armteil 1 usw. Das letzte
1 Die Festlegung der Koordinatensysteme gemäß Denavit-Hartenberg-Konventionen 1. Nummerierung die Armteile Der festgeschraubte Fuß ist Armteil 0, das erste drehbare Armteil ist Armteil 1 usw. Das letzte
Einführung in die Robotik. Jianwei Zhang
 - Jianwei Zhang zhang@informatik.uni-hamburg.de Fakultät für Mathematik, Informatik und Naturwissenschaften Technische Aspekte Multimodaler Systeme 20. April 2010 J. Zhang 63 Gliederung Allgemeine Informationen
- Jianwei Zhang zhang@informatik.uni-hamburg.de Fakultät für Mathematik, Informatik und Naturwissenschaften Technische Aspekte Multimodaler Systeme 20. April 2010 J. Zhang 63 Gliederung Allgemeine Informationen
Radgetriebene Systeme
 Radgetriebene Systeme Mobilität, Räder Räder benötigen weniger Energie und erlauben eine schnellere Fortbewegung (auf entsprechendem Terrain) Benötigen Kinematische Gleichungen, d.h. Beschreibungen wie
Radgetriebene Systeme Mobilität, Räder Räder benötigen weniger Energie und erlauben eine schnellere Fortbewegung (auf entsprechendem Terrain) Benötigen Kinematische Gleichungen, d.h. Beschreibungen wie
Gliederung. Gliederung (cont.) Kinematik-Gleichungen - (1) Allgemeine Informationen Einführung Koordinaten eines Manipulators. Kinematik-Gleichungen
 Kinematik-Gleichungen - (1) Allgemeine Informationen Einführung Koordinaten eines Manipulators. Kinematik-Gleichungen") - Gliederung Jianwei Zhang zhang@informatik.uni-hamburg.de Fakultät für Mathematik, Informatik und Naturwissenschaften Technische Aspekte Multimodaler Systeme 20. April 2010 Allgemeine Informationen Einführung
- Gliederung Jianwei Zhang zhang@informatik.uni-hamburg.de Fakultät für Mathematik, Informatik und Naturwissenschaften Technische Aspekte Multimodaler Systeme 20. April 2010 Allgemeine Informationen Einführung
4 Roboterkinematik. Roboterarm und Gelenke
 4 Roboterkinematik Roboterarm und Gelenke 4.1 Grundlegende Begriffe Mechanismus besteht aus einer Anzahl von starren Körpern (Glieder diese sind durch Gelenke verbunden Ein Gelenk verbindet genau zwei
4 Roboterkinematik Roboterarm und Gelenke 4.1 Grundlegende Begriffe Mechanismus besteht aus einer Anzahl von starren Körpern (Glieder diese sind durch Gelenke verbunden Ein Gelenk verbindet genau zwei
Übung 1: Homogene Transformationen
 Übung 1: Homogene Transformationen Aufgabe 1.1: Bestimmen Sie die homogene Transformationsmatri für die folgende Sequenz von Rotationen: T 1 =Rot z,90 Rot,90 und T 2 =Rot,90 Rot z,90 Zeichnen Sie die entsprechenden
Übung 1: Homogene Transformationen Aufgabe 1.1: Bestimmen Sie die homogene Transformationsmatri für die folgende Sequenz von Rotationen: T 1 =Rot z,90 Rot,90 und T 2 =Rot,90 Rot z,90 Zeichnen Sie die entsprechenden
Entwicklung einer allgemeinen dynamischen inversen Kinematik
 Entwicklung einer allgemeinen dynamischen inversen Kinematik Christoph Schmiedecke Studiendepartment Informatik Hochschule für Angewandte Wissenschaften Hamburg 06. Januar 2010 Inhaltsverzeichnis 1 Motivation
Entwicklung einer allgemeinen dynamischen inversen Kinematik Christoph Schmiedecke Studiendepartment Informatik Hochschule für Angewandte Wissenschaften Hamburg 06. Januar 2010 Inhaltsverzeichnis 1 Motivation
Lineare Abbildungen. De nition Seien V, W Vektorräume. Eine Abbildung f : V! W heißt linear, wenn gilt
 Lineare Abbildungen Lineare Abbildungen De nition Seien V, W Vektorräume. Eine Abbildung f : V! W heißt linear, wenn gilt (L. ) f ist homogen; d.h. f( ~v) = f(~v) für alle 2 R, ~v 2 V, (L. ) f ist additiv;
Lineare Abbildungen Lineare Abbildungen De nition Seien V, W Vektorräume. Eine Abbildung f : V! W heißt linear, wenn gilt (L. ) f ist homogen; d.h. f( ~v) = f(~v) für alle 2 R, ~v 2 V, (L. ) f ist additiv;
Inverse Kinematik am Robotersimulationsprogramm EASY-ROB
 Workshop Robotik Hochschule Mittweida (FH) Institut für Automatisierungstechnik 15. Oktober 2004 Stefan Anton Inverse Kinematik am Robotersimulationsprogramm EASY-ROB Problemstellung Bei der Betrachtung
Workshop Robotik Hochschule Mittweida (FH) Institut für Automatisierungstechnik 15. Oktober 2004 Stefan Anton Inverse Kinematik am Robotersimulationsprogramm EASY-ROB Problemstellung Bei der Betrachtung
Grundlagen der Signalverarbeitung und Robotik
 64-544 Grundlagen der Signalverarbeitung und Robotik 64-544 Grundlagen der Signalverarbeitung und Robotik http://tams.informatik.uni-hamburg.de/ lectures/2013ss/vorlesung/gdsr Jianwei Zhang, Bernd Schütz
64-544 Grundlagen der Signalverarbeitung und Robotik 64-544 Grundlagen der Signalverarbeitung und Robotik http://tams.informatik.uni-hamburg.de/ lectures/2013ss/vorlesung/gdsr Jianwei Zhang, Bernd Schütz
B. Heimann, W. Gerth, K. Popp: Mechatronik. Dritte, neu bearbeitete Auflage. Carl Hanser Verlag, München, 2007.
 Vorwort Nachfolgend soll die Koordinatentransformation nach Denavit-Hartenberg-Konvention am Beispiel eines realen Industrieroboters demonstriert werden. In der Kürze kann auf die nötigen Grundlagen nicht
Vorwort Nachfolgend soll die Koordinatentransformation nach Denavit-Hartenberg-Konvention am Beispiel eines realen Industrieroboters demonstriert werden. In der Kürze kann auf die nötigen Grundlagen nicht
Prof. J. Zhang Universität Hamburg. AB Technische Aspekte Multimodaler Systeme. 28. Oktober 2004
 zhang@informatik.uni-hamburg.de Universität Hamburg AB Technische Aspekte Multimodaler Systeme zhang@informatik.uni-hamburg.de Inhaltsverzeichnis 2. Koordinaten eines Manipulator.................. 32 Warum
zhang@informatik.uni-hamburg.de Universität Hamburg AB Technische Aspekte Multimodaler Systeme zhang@informatik.uni-hamburg.de Inhaltsverzeichnis 2. Koordinaten eines Manipulator.................. 32 Warum
Anwendung 1 - Ausarbeitung. Christoph Schmiedecke Entwicklung einer allgemeinen dynamischen inversen Kinematik
 Anwendung 1 - Ausarbeitung Christoph Schmiedecke Entwicklung einer allgemeinen dynamischen inversen Kinematik Fakultät Technik und Informatik Department Informatik Faculty of Engineering and Computer Science
Anwendung 1 - Ausarbeitung Christoph Schmiedecke Entwicklung einer allgemeinen dynamischen inversen Kinematik Fakultät Technik und Informatik Department Informatik Faculty of Engineering and Computer Science
AW 1 - Vortrag. Simulationsmodell für visuell geführte Roboter. von Bernd Pohlmann. Betreuender: Prof. Dr. Andreas Meisel
 AW 1 - Vortrag Simulationsmodell für visuell geführte Roboter von Betreuender: Prof. Dr. Andreas Meisel Inhalt 1. Motivation 2. Ziel 3. Einführung Robotik 4. Kinematik 5. Denavit-Hartenberg 6. Kameramodell
AW 1 - Vortrag Simulationsmodell für visuell geführte Roboter von Betreuender: Prof. Dr. Andreas Meisel Inhalt 1. Motivation 2. Ziel 3. Einführung Robotik 4. Kinematik 5. Denavit-Hartenberg 6. Kameramodell
Kinematik (1) Bisher: Darstellung von Vektoren bei bekannten Beziehungen zwischen den Koordinatensystemen
 Bisher: Darstellung von Vektoren bei bekannten Beziehungen zwischen den Koordinatensystemen") Kinematik ( Kinematik Bisher: Darstellung von Vektoren bei bekannten Beziehungen zwischen den Koordinatensystemen Jetzt: Beschreibung der Bewegung von mechanischen Systemen Hier nur Behandlung der Position
Kinematik ( Kinematik Bisher: Darstellung von Vektoren bei bekannten Beziehungen zwischen den Koordinatensystemen Jetzt: Beschreibung der Bewegung von mechanischen Systemen Hier nur Behandlung der Position
Abgleich mit dem Kerncurriculum 2016 für die gymnasiale Oberstufe Stoffverteilungsplan Mathematik Grundkurs
 Lambacher Schweizer Q2.1 Lineare Gleichungssysteme (LGS) Einführung und Lösungsverfahren: Beispiele für LGS (auch über- und unterbestimmte), Darstellen von LGS mithilfe von Koeffizientenmatrizen, systematisches
Lambacher Schweizer Q2.1 Lineare Gleichungssysteme (LGS) Einführung und Lösungsverfahren: Beispiele für LGS (auch über- und unterbestimmte), Darstellen von LGS mithilfe von Koeffizientenmatrizen, systematisches
Modulares Bewegungs- und Darstellungsmodell für serielle Kinematiken
 Modulares Bewegungs- und Darstellungsmodell für serielle Kinematiken Dipl-Ing Martin Erler 1 Einleitung Im Rahmen der Verifikation von NC-Daten spielt die Kollisionsvermeidung eine zentrale Rolle Insbesondere
Modulares Bewegungs- und Darstellungsmodell für serielle Kinematiken Dipl-Ing Martin Erler 1 Einleitung Im Rahmen der Verifikation von NC-Daten spielt die Kollisionsvermeidung eine zentrale Rolle Insbesondere
Position und Orientierung
 Position und Orientierung Grundlagen Koordinatensysteme, Punkte und Körper, Position und Orientierung Allgemeine Transformationen Rotation, homogene Koodinaten, Translation, Transformation 2D-Transformationen
Position und Orientierung Grundlagen Koordinatensysteme, Punkte und Körper, Position und Orientierung Allgemeine Transformationen Rotation, homogene Koodinaten, Translation, Transformation 2D-Transformationen
Humanoide Roboter. Shuji Kajita. Theorie und Technik des Künstlichen Menschen AKA. Herausgeber
 Humanoide Roboter Theorie und Technik des Künstlichen Menschen Herausgeber Shuji Kajita AKA Inhaltsverzeichnis Vorwort Thomas Christaller ix Shuji Kajita Kapitel 1. Überblick Humanoide Roboter 1 Kapitel
Humanoide Roboter Theorie und Technik des Künstlichen Menschen Herausgeber Shuji Kajita AKA Inhaltsverzeichnis Vorwort Thomas Christaller ix Shuji Kajita Kapitel 1. Überblick Humanoide Roboter 1 Kapitel
Inverse Kinematik am Robotersimulationsprogramm
 Inverse Kinematik am Robotersimulationsprogramm EASY-ROB Problemstellung Kinematiken in EASY-ROB Vorwärtstransformation Inverse Transformation Numerisches Lösungsverfahren zur inversen Transformation Kombination
Inverse Kinematik am Robotersimulationsprogramm EASY-ROB Problemstellung Kinematiken in EASY-ROB Vorwärtstransformation Inverse Transformation Numerisches Lösungsverfahren zur inversen Transformation Kombination
Koordinaten, Transformationen und Roboter
 Koordinaten, Transformationen und Roboter Dipl.-Inform. Wolfgang Globke Institut für Algebra und Geometrie Arbeitsgruppe Differentialgeometrie Universität Karlsruhe 1 / 48 Einleitung Seit Anbeginn der
Koordinaten, Transformationen und Roboter Dipl.-Inform. Wolfgang Globke Institut für Algebra und Geometrie Arbeitsgruppe Differentialgeometrie Universität Karlsruhe 1 / 48 Einleitung Seit Anbeginn der
Gliederung. Gliederung (cont.) Koordinaten eines Manipulators. Allgemeine Informationen Einführung
 Koordinaten eines Manipulators. Allgemeine Informationen Einführung") - Gliederung Jianwei Zhang zhang@informatik.uni-hamburg.de Fakultät für Mathematik, Informatik und Naturwissenschaften Technische Aspekte Multimodaler Systeme 14. April 2009 Allgemeine Informationen Einführung
- Gliederung Jianwei Zhang zhang@informatik.uni-hamburg.de Fakultät für Mathematik, Informatik und Naturwissenschaften Technische Aspekte Multimodaler Systeme 14. April 2009 Allgemeine Informationen Einführung
Hauscurriculum Q2 Lineare Algebra/Analytische Geometrie Grundkurs März 2017
 Hauscurriculum Q2 Lineare Algebra/Analytische Geometrie Grundkurs März 2017 Übersicht: Q2.3 im Raum Q2.4 Matrizen zur Beschreibung von Q2.6 Vertiefung der Analytischen Geometrie (nur Grundkurs) verbindlich:
Hauscurriculum Q2 Lineare Algebra/Analytische Geometrie Grundkurs März 2017 Übersicht: Q2.3 im Raum Q2.4 Matrizen zur Beschreibung von Q2.6 Vertiefung der Analytischen Geometrie (nur Grundkurs) verbindlich:
Herbstsemester a b 1. c d. e 0 f B = (iii) e = 0 (iv) ) 2 + ( 1. Das Skalarprodukt des ersten und zweiten Spaltenvektors muss null ergeben:
 e = 0 (iv) ) 2 + ( 1. Das Skalarprodukt des ersten und zweiten Spaltenvektors muss null ergeben:") Dr V Gradinaru D Devaud Herbstsemester 5 Lineare Algebra für D-ITET, D-MATL, RW ETH Zürich D-MATH Beispiellösung für Serie 5 Aufgabe 5 Multiple Choice: Online abzugeben Gegeben sei die orthogonale Matrix
Dr V Gradinaru D Devaud Herbstsemester 5 Lineare Algebra für D-ITET, D-MATL, RW ETH Zürich D-MATH Beispiellösung für Serie 5 Aufgabe 5 Multiple Choice: Online abzugeben Gegeben sei die orthogonale Matrix
Herbstsemester ist es.
 Dr V Gradinaru K Imeri Herbstsemester 8 Lineare Algebra für D-ITET, D-MATL, RW ETH Zürich D-MATH Beispiellösung für Serie 4 Aufgabe 4 Multiple Choice: Online abzugeben 4a) Gegeben seien: Dann gilt: (i)
Dr V Gradinaru K Imeri Herbstsemester 8 Lineare Algebra für D-ITET, D-MATL, RW ETH Zürich D-MATH Beispiellösung für Serie 4 Aufgabe 4 Multiple Choice: Online abzugeben 4a) Gegeben seien: Dann gilt: (i)
Bewegungssteuerung und Programmierung von Robotersystemen. Klausur
 Fachhochschule Darmstadt Fachbereich Elektrotechnik und Informationstechnik Prof. Dr.-Ing. A. Weigl-Seit ewegungssteuerung und Programmierung von Robotersstemen Klausur 1. Februar 2006 10:15 11:45 Uhr
Fachhochschule Darmstadt Fachbereich Elektrotechnik und Informationstechnik Prof. Dr.-Ing. A. Weigl-Seit ewegungssteuerung und Programmierung von Robotersstemen Klausur 1. Februar 2006 10:15 11:45 Uhr
Prüfung SS Robotik
 Prüfung SS 2002 Robotik Anmerkungen: Aufgabenblätter auf Vollständigkeit überprüfen Nur Blätter mit Namen und Matr.Nr. werden korrigiert. Keine rote Farbe verwenden. Zu jeder Lösung Aufgabennummer angeben.
Prüfung SS 2002 Robotik Anmerkungen: Aufgabenblätter auf Vollständigkeit überprüfen Nur Blätter mit Namen und Matr.Nr. werden korrigiert. Keine rote Farbe verwenden. Zu jeder Lösung Aufgabennummer angeben.
Kinematik des starren Körpers
 Technische Mechanik II Kinematik des starren Körpers Prof. Dr.-Ing. Ulrike Zwiers, M.Sc. Fachbereich Mechatronik und Maschinenbau Hochschule Bochum WS 2009/2010 Übersicht 1. Kinematik des Massenpunktes
Technische Mechanik II Kinematik des starren Körpers Prof. Dr.-Ing. Ulrike Zwiers, M.Sc. Fachbereich Mechatronik und Maschinenbau Hochschule Bochum WS 2009/2010 Übersicht 1. Kinematik des Massenpunktes
Gliederung. Gliederung (cont.)
") Gliederung Jianwei Zhang zhang@informatik.uni-hamburg.de Fakultät für Mathematik, Informatik und Naturwissenschaften Technische Aspekte Multimodaler Systeme 07. April 2009 Einführung Grundbegriffe Koordinatensysteme
Gliederung Jianwei Zhang zhang@informatik.uni-hamburg.de Fakultät für Mathematik, Informatik und Naturwissenschaften Technische Aspekte Multimodaler Systeme 07. April 2009 Einführung Grundbegriffe Koordinatensysteme
Gliederung. Gliederung (cont.) Gliederung (cont.)
 Gliederung (cont.)") Gliederung Jianwei Zhang zhang@informatik.uni-hamburg.de Fakultät für Mathematik, Informatik und Naturwissenschaften Technische Aspekte Multimodaler Systeme 03. April 2012 Einführung Grundbegriffe Koordinatensysteme
Gliederung Jianwei Zhang zhang@informatik.uni-hamburg.de Fakultät für Mathematik, Informatik und Naturwissenschaften Technische Aspekte Multimodaler Systeme 03. April 2012 Einführung Grundbegriffe Koordinatensysteme
Abgleich mit dem Kerncurriculum 2016 für die gymnasiale Oberstufe Stoffverteilungsplan Mathematik Leistungskurs
 Q2.1 Lineare Gleichungssysteme (LGS) Einführung und Lösungsverfahren: Beispiele für LGS (auch über- und unterbestimmte), Darstellen von LGS mithilfe von Koeffizientenmatrizen, systematisches Lösen von
Q2.1 Lineare Gleichungssysteme (LGS) Einführung und Lösungsverfahren: Beispiele für LGS (auch über- und unterbestimmte), Darstellen von LGS mithilfe von Koeffizientenmatrizen, systematisches Lösen von
Gliederung. Gliederung (cont.) Gliederung (cont.)
 Gliederung (cont.)") Gliederung Jianwei Zhang zhang@informatik.uni-hamburg.de Fakultät für Mathematik, Informatik und Naturwissenschaften Technische Aspekte Multimodaler Systeme 05. April 2011 Grundbegriffe Koordinatensysteme
Gliederung Jianwei Zhang zhang@informatik.uni-hamburg.de Fakultät für Mathematik, Informatik und Naturwissenschaften Technische Aspekte Multimodaler Systeme 05. April 2011 Grundbegriffe Koordinatensysteme
Jianwei Zhang
 Jianwei Zhang zhang@informatik.uni-hamburg.de Fakultät für Mathematik, Informatik und Naturwissenschaften Technische Aspekte Multimodaler Systeme 03. April 2012 J. Zhang 1 Gliederung Allgemeine Informationen
Jianwei Zhang zhang@informatik.uni-hamburg.de Fakultät für Mathematik, Informatik und Naturwissenschaften Technische Aspekte Multimodaler Systeme 03. April 2012 J. Zhang 1 Gliederung Allgemeine Informationen
Uberblick 1. Problemstellung 2. Kongurationsraum 3. Bewegungsplanung fur einen Punktroboter 4. Minkowski Summen 5. Pseudo-Scheiben 6. Bewegungsplanung
 Vorlesung Geometrische Algorithmen Bewegungsplanung fur Roboter (Robot Motion Planning) Sven Schuierer Uberblick 1. Problemstellung 2. Kongurationsraum 3. Bewegungsplanung fur einen Punktroboter 4. Minkowski
Vorlesung Geometrische Algorithmen Bewegungsplanung fur Roboter (Robot Motion Planning) Sven Schuierer Uberblick 1. Problemstellung 2. Kongurationsraum 3. Bewegungsplanung fur einen Punktroboter 4. Minkowski
Gliederung. Gliederung (cont.) Gliederung (cont.)
 Gliederung (cont.)") - Gliederung Jianwei Zhang zhang@informatik.uni-hamburg.de Fakultät für Mathematik, Informatik und Naturwissenschaften Technische Aspekte Multimodaler Systeme 11. Mai 2010 Allgemeine Informationen Einführung
- Gliederung Jianwei Zhang zhang@informatik.uni-hamburg.de Fakultät für Mathematik, Informatik und Naturwissenschaften Technische Aspekte Multimodaler Systeme 11. Mai 2010 Allgemeine Informationen Einführung
12 Übungen zu Gauß-Algorithmus
 Aufgaben zum Vorkurs B S. 2 Übungen zu Gauß-Algorithmus 2x x 2 = 7x +, 5x 2 = 7 Aufgabe 6: Aufgabe 7: Aufgabe 8: Aufgabe 9: 2x x 2 = x +2x 2 = 2 2x x 2 = 7x +, 5x 2 =, 5 x 2x 2 = x +x 2 = 5 2x +x 2 = 4
Aufgaben zum Vorkurs B S. 2 Übungen zu Gauß-Algorithmus 2x x 2 = 7x +, 5x 2 = 7 Aufgabe 6: Aufgabe 7: Aufgabe 8: Aufgabe 9: 2x x 2 = x +2x 2 = 2 2x x 2 = 7x +, 5x 2 =, 5 x 2x 2 = x +x 2 = 5 2x +x 2 = 4
Jianwei Zhang
 Jianwei Zhang zhang@informatik.uni-hamburg.de Fakultät für Mathematik, Informatik und Naturwissenschaften Technische Aspekte Multimodaler Systeme 06. April 2010 J. Zhang 1 Gliederung Allgemeine Informationen
Jianwei Zhang zhang@informatik.uni-hamburg.de Fakultät für Mathematik, Informatik und Naturwissenschaften Technische Aspekte Multimodaler Systeme 06. April 2010 J. Zhang 1 Gliederung Allgemeine Informationen
Kapitel 3: Geometrische Transformationen
 [ Computeranimation ] Kapitel 3: Geometrische Transformationen Prof. Dr. Stefan M. Grünvogel stefan.gruenvogel@fh-koeln.de Institut für Medien- und Phototechnik Fachhochschule Köln 3. Geometrische Transformationen
[ Computeranimation ] Kapitel 3: Geometrische Transformationen Prof. Dr. Stefan M. Grünvogel stefan.gruenvogel@fh-koeln.de Institut für Medien- und Phototechnik Fachhochschule Köln 3. Geometrische Transformationen
Analytische Geometrie II
 Analytische Geometrie II Rainer Hauser März 212 1 Einleitung 1.1 Geradengleichungen in Parameterform Jede Gerade g in der Ebene oder im Raum lässt sich durch einen festen Punkt auf g, dessen Ortsvektor
Analytische Geometrie II Rainer Hauser März 212 1 Einleitung 1.1 Geradengleichungen in Parameterform Jede Gerade g in der Ebene oder im Raum lässt sich durch einen festen Punkt auf g, dessen Ortsvektor
RS01 EINFÜHRUNG INDUSTRIEROBOTIK
 RS01 EINFÜHRUNG INDUSTRIEROBOTIK 1.1 Robotersysteme - Begriffsbestimmung 1.1.1 Definitionen 1921 Karel Čapek, robota (tschechisch) = arbeiten, Fronarbeit verrichten Robot (engl.) (nach Robot Institute
RS01 EINFÜHRUNG INDUSTRIEROBOTIK 1.1 Robotersysteme - Begriffsbestimmung 1.1.1 Definitionen 1921 Karel Čapek, robota (tschechisch) = arbeiten, Fronarbeit verrichten Robot (engl.) (nach Robot Institute
Gliederung. Gliederung (cont.) Inverse Kinematik von Manipulatoren
 Inverse Kinematik von Manipulatoren") - Gliederung Jianwei Zhang zhang@informatik.uni-hamburg.de Fakultät für Mathematik, Informatik und Naturwissenschaften Technische Aspekte Multimodaler Systeme 26. April 2011 Allgemeine Informationen Einführung
- Gliederung Jianwei Zhang zhang@informatik.uni-hamburg.de Fakultät für Mathematik, Informatik und Naturwissenschaften Technische Aspekte Multimodaler Systeme 26. April 2011 Allgemeine Informationen Einführung
Feldbacher Markus Manipulationstechnik Kinematik. Kinetik. (Bewegungslehre) Mechanik Lehre von der Bewegung von Körpern
 Mechanik Lehre von der Bewegung von Körpern") Kinematik (Bewegungslehre) Mechanik Lehre von der Bewegung von Körpern Kinematik Lehre von den geo- Metrischen Bewegungsverhältnissen von Körpern. Dynamik Lehre von den Kräften Kinetik Lehre von den Bewegungen
Kinematik (Bewegungslehre) Mechanik Lehre von der Bewegung von Körpern Kinematik Lehre von den geo- Metrischen Bewegungsverhältnissen von Körpern. Dynamik Lehre von den Kräften Kinetik Lehre von den Bewegungen
Kapitel 3. Transformationen
 Oyun Namdag Am 08.11.2007 WS 07/08 Proseminar Numerik: Mathematics for 3D game programming & computer graphics Dozenten: Prof. Dr. V. Schulz, C. Schillings Universität Trier Kapitel 3 Transformationen
Oyun Namdag Am 08.11.2007 WS 07/08 Proseminar Numerik: Mathematics for 3D game programming & computer graphics Dozenten: Prof. Dr. V. Schulz, C. Schillings Universität Trier Kapitel 3 Transformationen
Klausur Robotik/Steuerungstechnik
 Prof. Dr. K. Wüst SS 2009 Fachbereich MNI FH Gießen-Friedberg Klausur Robotik/Steuerungstechnik 9.7.2009 Nachname: Vorname: Matrikelnummer: Aufgabe Punkte erreicht 1 30 2 30 3 40 4 20 Summe 120 Mit Lösungen
Prof. Dr. K. Wüst SS 2009 Fachbereich MNI FH Gießen-Friedberg Klausur Robotik/Steuerungstechnik 9.7.2009 Nachname: Vorname: Matrikelnummer: Aufgabe Punkte erreicht 1 30 2 30 3 40 4 20 Summe 120 Mit Lösungen
Computergrafik Universität Osnabrück, Henning Wenke,
 Computergrafik Universität Osnabrück, Henning Wenke, 2012-05-30 Korrektur: Kugelkoordinaten II r und θ konstant: Rand einer Kreisscheibe parallel zur xy Ebene z θ fest y θ konstant, r R : Kegel, ausgehend
Computergrafik Universität Osnabrück, Henning Wenke, 2012-05-30 Korrektur: Kugelkoordinaten II r und θ konstant: Rand einer Kreisscheibe parallel zur xy Ebene z θ fest y θ konstant, r R : Kegel, ausgehend
Nachklausur (Modulprüfung) zum Lehrerweiterbildungskurs 6 Lineare Algebra/Analytische Geometrie I WiSe 2016/17
 zum Lehrerweiterbildungskurs 6 Lineare Algebra/Analytische Geometrie I WiSe 2016/17") Name, Vorname Matrikel-Nr. Aufg.1 Aufg.2 Aufg.3 Aufg.4 Σ Note bzw. Kennzeichen Nachklausur (Modulprüfung) zum Lehrerweiterbildungskurs 6 Lineare Algebra/Analytische Geometrie I WiSe 2016/17 Bearbeiten
Name, Vorname Matrikel-Nr. Aufg.1 Aufg.2 Aufg.3 Aufg.4 Σ Note bzw. Kennzeichen Nachklausur (Modulprüfung) zum Lehrerweiterbildungskurs 6 Lineare Algebra/Analytische Geometrie I WiSe 2016/17 Bearbeiten
Mechanik und Motoren
 Mechanik und Motoren Mechanik und Antrieb (Aktuatoren) Welche Art von Mechanik und Aktuatoren verwendet werden, wird durch die gewünscht Funktion des Roboters bestimmt Früher versuchte man Roboter zu bauen,
Mechanik und Motoren Mechanik und Antrieb (Aktuatoren) Welche Art von Mechanik und Aktuatoren verwendet werden, wird durch die gewünscht Funktion des Roboters bestimmt Früher versuchte man Roboter zu bauen,
1. Grundlagen der ebenen Kinematik
 Lage: Die Lage eines starren Körpers in der Ebene ist durch die Angabe von zwei Punkten A und P eindeutig festgelegt. Die Lage eines beliebigen Punktes P wird durch Polarkoordinaten bezüglich des Bezugspunktes
Lage: Die Lage eines starren Körpers in der Ebene ist durch die Angabe von zwei Punkten A und P eindeutig festgelegt. Die Lage eines beliebigen Punktes P wird durch Polarkoordinaten bezüglich des Bezugspunktes
Historisches zur Gruppentheorie
 Historisches zur Gruppentheorie Dipl.-Inform. Wolfgang Globke Institut für Algebra und Geometrie Arbeitsgruppe Differentialgeometrie Universität Karlsruhe 1 / 20 Gruppen: Abstrakte Definition Eine Gruppe
Historisches zur Gruppentheorie Dipl.-Inform. Wolfgang Globke Institut für Algebra und Geometrie Arbeitsgruppe Differentialgeometrie Universität Karlsruhe 1 / 20 Gruppen: Abstrakte Definition Eine Gruppe
Transformation Allgemeines Die Lage eines Punktes kann durch einen Ortsvektor (ausgehend vom Ursprung des Koordinatensystems
 Transformation - 1 1. Allgemeines 2. Zwei durch eine Translation verknüpfte gleichartige Basissysteme 3. Zwei durch eine Translation verknüpfte verschiedenartige Basissysteme (noch gleiche Orientierung)
Transformation - 1 1. Allgemeines 2. Zwei durch eine Translation verknüpfte gleichartige Basissysteme 3. Zwei durch eine Translation verknüpfte verschiedenartige Basissysteme (noch gleiche Orientierung)
Prüfungsdauer: 120 Minuten
 Computergraphik und Multimediasysteme Seite 1 von 6 Klausur: Computergraphik II Probeklausur Semester: Prüfer: Prüfungsdauer: 1 Minuten Hilfsmittel: Schreibgeräte, Lineal, nichtprogrammierbarer Taschenrechner
Computergraphik und Multimediasysteme Seite 1 von 6 Klausur: Computergraphik II Probeklausur Semester: Prüfer: Prüfungsdauer: 1 Minuten Hilfsmittel: Schreibgeräte, Lineal, nichtprogrammierbarer Taschenrechner
4. Roboterkinematiken
 4. Roboterkinematiken Begriffe Kinematik, Dynamik und Achsen Freiheitsgrad und Bewegungsfreiheitsgrad Symbolische Darstellung von Kinematiken Konfigurationen und Arbeitsräume Direkte und inverse Kinematik
4. Roboterkinematiken Begriffe Kinematik, Dynamik und Achsen Freiheitsgrad und Bewegungsfreiheitsgrad Symbolische Darstellung von Kinematiken Konfigurationen und Arbeitsräume Direkte und inverse Kinematik
Einführung in die Robotik. Jianwei Zhang
 - Jianwei Zhang zhang@informatik.uni-hamburg.de Fakultät für Mathematik, Informatik und Naturwissenschaften Technische Aspekte Multimodaler Systeme 03. May 2011 J. Zhang 129 Differentielle Bewegungen mit
- Jianwei Zhang zhang@informatik.uni-hamburg.de Fakultät für Mathematik, Informatik und Naturwissenschaften Technische Aspekte Multimodaler Systeme 03. May 2011 J. Zhang 129 Differentielle Bewegungen mit
Prüfung WS 2006/07. Robotik
 Prüfung WS 26/7 Robotik Anmerkungen: Aufgabenblätter auf Vollständigkeit überprüfen Nur Blätter mit Namen und Matr.Nr. werden korrigiert. Keine rote Farbe verwenden. Zu jeder Lösung Aufgabennummer angeben.
Prüfung WS 26/7 Robotik Anmerkungen: Aufgabenblätter auf Vollständigkeit überprüfen Nur Blätter mit Namen und Matr.Nr. werden korrigiert. Keine rote Farbe verwenden. Zu jeder Lösung Aufgabennummer angeben.
Computer Vision I. Nikos Canterakis. Lehrstuhl für Mustererkennung, Universität Freiburg,
 Nikos Canterakis Lehrstuhl für Mustererkennung, Universität Freiburg, Gliederung 4 Invarianten Isometrien (Kongruenzen) Ähnlichkeitsabbildungen Affine Transformationen Projektive Transformationen 2 von
Nikos Canterakis Lehrstuhl für Mustererkennung, Universität Freiburg, Gliederung 4 Invarianten Isometrien (Kongruenzen) Ähnlichkeitsabbildungen Affine Transformationen Projektive Transformationen 2 von
RS-Ü1 Aufgabe 1. Inverse Kinematik. bei Standardrobotern nur optional (z.b. zur Mehrgrößenregelung) Standardindustrieroboter + Steuergerät
 Standardindustrieroboter + Steuergerät") RS-Ü1 Aufgabe 1 Inverse Kinematik im Arbeitsraum (kartesisch) kartesisch Standardindustrieroboter + Steuergerät bestimme Gelenk- Sollvorgaben steuere in Gelenkkoordinaten Bearbeitungsaufgabe Gelenkmesswerte
RS-Ü1 Aufgabe 1 Inverse Kinematik im Arbeitsraum (kartesisch) kartesisch Standardindustrieroboter + Steuergerät bestimme Gelenk- Sollvorgaben steuere in Gelenkkoordinaten Bearbeitungsaufgabe Gelenkmesswerte
4.6 Computergestütztes Aufstellen der Bewegungsgleichungen
 Computergestütztes Aufstellen der Bewegungsgleichungen 91 4.6 Computergestütztes Aufstellen der Bewegungsgleichungen Die Schwierigkeit bei der Herleitung der dynamischen Gleichungen komplexer Mehrkörpersysteme
Computergestütztes Aufstellen der Bewegungsgleichungen 91 4.6 Computergestütztes Aufstellen der Bewegungsgleichungen Die Schwierigkeit bei der Herleitung der dynamischen Gleichungen komplexer Mehrkörpersysteme
Einführung in die Robotik
 Einführung in die Robotik Vorlesung 6 04 Dezember 2007 Dr. Mohamed Oubbati Institut für Neuroinformatik WS 2007/2008 Heutiges Thema: Kinematik Einführung Was ist die Kinematik? Die Kinematik beschäftigt
Einführung in die Robotik Vorlesung 6 04 Dezember 2007 Dr. Mohamed Oubbati Institut für Neuroinformatik WS 2007/2008 Heutiges Thema: Kinematik Einführung Was ist die Kinematik? Die Kinematik beschäftigt
Klausur Mehrkörperdynamik 26/07/2012
 Klausur Mehrkörperdynamik 26/07/2012 Matrikelnummer: Folgende Angaben sind freiwillig: Name, Vorname: Studiengang: Hinweise: Die Bearbeitungszeit der Klausur beträgt zwei Stunden. Zulässige Hilfsmittel
Klausur Mehrkörperdynamik 26/07/2012 Matrikelnummer: Folgende Angaben sind freiwillig: Name, Vorname: Studiengang: Hinweise: Die Bearbeitungszeit der Klausur beträgt zwei Stunden. Zulässige Hilfsmittel
Vortrag 20: Kurze Vektoren in Gittern
 Seminar: Wie genau ist ungefähr Vortrag 20: Kurze Vektoren in Gittern Kerstin Bauer Sommerakademie Görlitz, 2007 Definition und Problembeschreibung Definition: Gitter Seien b 1,,b k Q n. Dann heißt die
Seminar: Wie genau ist ungefähr Vortrag 20: Kurze Vektoren in Gittern Kerstin Bauer Sommerakademie Görlitz, 2007 Definition und Problembeschreibung Definition: Gitter Seien b 1,,b k Q n. Dann heißt die
D-MAVT Lineare Algebra I HS 2018 Prof. Dr. N. Hungerbühler. Lösungen 7
 D-MAVT Lineare Algebra I HS 8 Prof. Dr. N. Hungerbühler Lösungen 7. Gegeben seien: A := ( ), A := 5 ( ) 3 4. 4 3 Welche der folgenden Aussagen gelten? (a) A ist orthogonal. (b) A ist orthogonal. Lösung.
D-MAVT Lineare Algebra I HS 8 Prof. Dr. N. Hungerbühler Lösungen 7. Gegeben seien: A := ( ), A := 5 ( ) 3 4. 4 3 Welche der folgenden Aussagen gelten? (a) A ist orthogonal. (b) A ist orthogonal. Lösung.
Curriculum Mathematik Oberstufe der Gesamtschule Eiserfeld
 Curriculum Mathematik Oberstufe der Gesamtschule Eiserfeld 11.1 11.2 Unterrichtsvorhaben: Funktionen Unterrichtsvorhaben: Differenzialrechnung 1) Lineare und exponentielle Wachstumsprozesse a) Modellieren
Curriculum Mathematik Oberstufe der Gesamtschule Eiserfeld 11.1 11.2 Unterrichtsvorhaben: Funktionen Unterrichtsvorhaben: Differenzialrechnung 1) Lineare und exponentielle Wachstumsprozesse a) Modellieren
8. Vorlesung, 5. April Numerische Methoden I. Eigenwerte und Eigenvektoren
 8. Vorlesung, 5. April 2017 170 004 Numerische Methoden I Eigenwerte und Eigenvektoren 1 Eigenwerte und Eigenvektoren Gegeben ist eine n n-matrix A. Gesucht sind ein vom Nullvektor verschiedener Vektor
8. Vorlesung, 5. April 2017 170 004 Numerische Methoden I Eigenwerte und Eigenvektoren 1 Eigenwerte und Eigenvektoren Gegeben ist eine n n-matrix A. Gesucht sind ein vom Nullvektor verschiedener Vektor
2D-Punkt-Transformationen
 Zur Erinnerung Drehung eines beliebigen Punktes B um den Winkel θ um den Koordinaten-Ursprung zum Punkt B : x B r cosα y B r sin α [r, α: Hilfsgrößen ] x B r cos(α+θ) r (cosα cosθ sinα sinθ) x B cosθ y
Zur Erinnerung Drehung eines beliebigen Punktes B um den Winkel θ um den Koordinaten-Ursprung zum Punkt B : x B r cosα y B r sin α [r, α: Hilfsgrößen ] x B r cos(α+θ) r (cosα cosθ sinα sinθ) x B cosθ y
Prof. J. Zhang Universität Hamburg. AB Technische Aspekte Multimodaler Systeme. 18. November 2004
 zhang@informatik.uni-hamburg.de Universität Hamburg AB Technische Aspekte Multimodaler Systeme zhang@informatik.uni-hamburg.de Inhaltsverzeichnis 4. Differentielle Bewegungen mit homogenen Transformationen...144
zhang@informatik.uni-hamburg.de Universität Hamburg AB Technische Aspekte Multimodaler Systeme zhang@informatik.uni-hamburg.de Inhaltsverzeichnis 4. Differentielle Bewegungen mit homogenen Transformationen...144
Implementierung eines neuartigen, effizienten Algorithmus zur Berechnung der inversen Kinematik von seriellen Robotern mit Drehgelenken
 Session 4: mechanics and model based control Implementierung eines neuartigen, effizienten Algorithmus zur Berechnung der inversen Kinematik von seriellen Robotern mit Drehgelenken Univ. Prof. Dr. Manfred
Session 4: mechanics and model based control Implementierung eines neuartigen, effizienten Algorithmus zur Berechnung der inversen Kinematik von seriellen Robotern mit Drehgelenken Univ. Prof. Dr. Manfred
Gliederung. Differentielle Bewegungen. Gliederung (cont.)
") - Gliederung Jianwei Zhang zhang@informatik.uni-hamburg.de Fakultät für Mathematik, Informatik und Naturwissenschaften Technische Aspekte Multimodaler Systeme 15. May 2012 Allgemeine Informationen Einführung
- Gliederung Jianwei Zhang zhang@informatik.uni-hamburg.de Fakultät für Mathematik, Informatik und Naturwissenschaften Technische Aspekte Multimodaler Systeme 15. May 2012 Allgemeine Informationen Einführung
2 Die Algebra der Matrizen
 Die Algebra der Matrizen Ein Hauptziel der Vorlesung zur Linearen Algebra besteht darin, Aussagen über die Lösungsmenge linearer Gleichungssysteme zu machen Etwa ob das Gleichungssystem x y + z 1 x + y
Die Algebra der Matrizen Ein Hauptziel der Vorlesung zur Linearen Algebra besteht darin, Aussagen über die Lösungsmenge linearer Gleichungssysteme zu machen Etwa ob das Gleichungssystem x y + z 1 x + y
Lineare Algebra für D-ITET, D-MATL, RW. Beispiellösung für Serie 4. Aufgabe 4.1. Dr. V. Gradinaru D. Devaud A. Hiltebrand.
 Dr V Gradinaru D Devaud A Hiltebrand Herbstsemester 4 Lineare Algebra für D-ITET, D-MATL, RW ETH Zürich D-MATH Beispiellösung für Serie 4 Aufgabe 4 Multiple Choice: Online abzugeben 4a) Wir betrachten
Dr V Gradinaru D Devaud A Hiltebrand Herbstsemester 4 Lineare Algebra für D-ITET, D-MATL, RW ETH Zürich D-MATH Beispiellösung für Serie 4 Aufgabe 4 Multiple Choice: Online abzugeben 4a) Wir betrachten
RS01 EINFÜHRUNG INDUSTRIEROBOTIK
 RS01 EINFÜHRUNG INDUSTRIEROBOTIK 1.1 Robotersysteme - Begriffsbestimmung 1.1.1 Definitionen 1921 Karel Čapek, robota (tschechisch) = arbeiten, Fronarbeit verrichten Robot (engl.) (nach Robot Institute
RS01 EINFÜHRUNG INDUSTRIEROBOTIK 1.1 Robotersysteme - Begriffsbestimmung 1.1.1 Definitionen 1921 Karel Čapek, robota (tschechisch) = arbeiten, Fronarbeit verrichten Robot (engl.) (nach Robot Institute
Abitur 2010 Mathematik LK Geometrie V
 Seite http://www.abiturloesung.de/ Seite Abitur Mathematik LK Geometrie V Gegeben sind in einem kartesischen Koordinatensystem des R der Punkt A( ) und die Menge der Punkte B k ( k) mit k R. Die Punkte
Seite http://www.abiturloesung.de/ Seite Abitur Mathematik LK Geometrie V Gegeben sind in einem kartesischen Koordinatensystem des R der Punkt A( ) und die Menge der Punkte B k ( k) mit k R. Die Punkte
Inhalt. Mathematik für Chemiker II Lineare Algebra. Vorlesung im Sommersemester Kurt Frischmuth. Rostock, April Juli 2015
 Inhalt Mathematik für Chemiker II Lineare Algebra Vorlesung im Sommersemester 5 Rostock, April Juli 5 Vektoren und Matrizen Abbildungen 3 Gleichungssysteme 4 Eigenwerte 5 Funktionen mehrerer Variabler
Inhalt Mathematik für Chemiker II Lineare Algebra Vorlesung im Sommersemester 5 Rostock, April Juli 5 Vektoren und Matrizen Abbildungen 3 Gleichungssysteme 4 Eigenwerte 5 Funktionen mehrerer Variabler
Mathematik I für MB und ME
 Mathematik I für MB und ME Fachbereich Grundlagenwissenschaften Prof Dr Viola Weiÿ Wintersemester 28/29 Übungsaufgaben Serie 4: Lineare Unabhängigkeit, Matrizen, Determinanten, LGS Prüfen Sie, ob die folgenden
Mathematik I für MB und ME Fachbereich Grundlagenwissenschaften Prof Dr Viola Weiÿ Wintersemester 28/29 Übungsaufgaben Serie 4: Lineare Unabhängigkeit, Matrizen, Determinanten, LGS Prüfen Sie, ob die folgenden
Kinematik des Puma 200
 Kinematik des Puma 200 1 2 Inhaltsverzeichnis Inhaltsverzeichnis 1 Einführung 3 2 Denavit-Hartenberg-Konfiguration 5 3 Mehrdeutigkeiten 7 4 Direkte Kinematik 10 5 Inverse Kinematik 13 6 Orientierung des
Kinematik des Puma 200 1 2 Inhaltsverzeichnis Inhaltsverzeichnis 1 Einführung 3 2 Denavit-Hartenberg-Konfiguration 5 3 Mehrdeutigkeiten 7 4 Direkte Kinematik 10 5 Inverse Kinematik 13 6 Orientierung des
Übungsblatt
 Übungsblatt 3 3.5.27 ) Die folgenden vier Matrizen bilden eine Darstellung der Gruppe C 4 : E =, A =, B =, C = Zeigen Sie einige Gruppeneigenschaften: a) Abgeschlossenheit: Berechnen Sie alle möglichen
Übungsblatt 3 3.5.27 ) Die folgenden vier Matrizen bilden eine Darstellung der Gruppe C 4 : E =, A =, B =, C = Zeigen Sie einige Gruppeneigenschaften: a) Abgeschlossenheit: Berechnen Sie alle möglichen
Entwicklung und Analyse des kinematischen Modells für die Werkzeugmaschine TriPod W3
 Fachbereich Technik Elmar Wings, Tirazheh Zare Garizy, Björn Lünemann Entwicklung und Analyse des kinematischen Modells für die Werkzeugmaschine TriPod W3 Singularitätsanalyse und Optimierung der Modellparameter
Fachbereich Technik Elmar Wings, Tirazheh Zare Garizy, Björn Lünemann Entwicklung und Analyse des kinematischen Modells für die Werkzeugmaschine TriPod W3 Singularitätsanalyse und Optimierung der Modellparameter
einer Raumkurve, wobei t als Zeitparameter interpretiert wird. w( t ) beschreibt also den kinematischen Kurvendurchlauf (κ ι ν ε µ α = Bewegung).
 beschreibt also den kinematischen Kurvendurchlauf (κ ι ν ε µ α = Bewegung).") 10.4. Raumkurven Kinematik Wir betrachten eine zweimal differenzierbare Parameterdarstellung w( t) x( t ) y( t ) z( t ) einer Raumkurve, wobei t als Zeitparameter interpretiert wird. w( t ) beschreibt
10.4. Raumkurven Kinematik Wir betrachten eine zweimal differenzierbare Parameterdarstellung w( t) x( t ) y( t ) z( t ) einer Raumkurve, wobei t als Zeitparameter interpretiert wird. w( t ) beschreibt
Vektoren - Die Basis
 Vektoren - Die Basis Motivation (Als Vereinfachung - der Schreibarbeit - wählen wir meistens Vektoren in R 2.) Eigentlich ist ja Alles klar! Für einen Vektor a gilt a = ( a x a y )! Am Ende werden wir
Vektoren - Die Basis Motivation (Als Vereinfachung - der Schreibarbeit - wählen wir meistens Vektoren in R 2.) Eigentlich ist ja Alles klar! Für einen Vektor a gilt a = ( a x a y )! Am Ende werden wir
Informatik, Mathematik und Naturwissenschaften Hochschule für Technik, Wirtschaft und Kultur
 I N V E R S E O B E R K Ö R P E R - K I N E M AT I K F Ü R D I E H U M A N O I D E R O B O T E R P L AT F O R M N A O stephan bischoff Informatik, Mathematik und Naturwissenschaften Hochschule für Technik,
I N V E R S E O B E R K Ö R P E R - K I N E M AT I K F Ü R D I E H U M A N O I D E R O B O T E R P L AT F O R M N A O stephan bischoff Informatik, Mathematik und Naturwissenschaften Hochschule für Technik,
Analytische Geometrie - Schnittwinkel. u 1, u 2 Richtungsvektoren der Geraden
 Analytische Geometrie - Schnittwinkel. Möglichkeiten und Formeln Gerade / Gerade: cos( ) = u u 2 u u 2 Gerade / Ebene: sin( ) = n u n u Ebene / Ebene: cos( ) = n n 2 n n 2 u, u 2 Richtungsvektoren der
Analytische Geometrie - Schnittwinkel. Möglichkeiten und Formeln Gerade / Gerade: cos( ) = u u 2 u u 2 Gerade / Ebene: sin( ) = n u n u Ebene / Ebene: cos( ) = n n 2 n n 2 u, u 2 Richtungsvektoren der
Computer Vision I. Nikos Canterakis. Lehrstuhl für Mustererkennung, Universität Freiburg
 Nikos Canterakis Lehrstuhl für Mustererkennung, Universität Freiburg Gliederung 5 Quadriken Polarität Transformationen Klassifikation von Quadriken Geraden in Regelquadriken Die kubische Wendelinie (twisted
Nikos Canterakis Lehrstuhl für Mustererkennung, Universität Freiburg Gliederung 5 Quadriken Polarität Transformationen Klassifikation von Quadriken Geraden in Regelquadriken Die kubische Wendelinie (twisted
Einleitung 2. 1 Koordinatensysteme 2. 2 Lineare Abbildungen 4. 3 Literaturverzeichnis 7
 Sonja Hunscha - Koordinatensysteme 1 Inhalt Einleitung 2 1 Koordinatensysteme 2 1.1 Kartesisches Koordinatensystem 2 1.2 Polarkoordinaten 3 1.3 Zusammenhang zwischen kartesischen und Polarkoordinaten 3
Sonja Hunscha - Koordinatensysteme 1 Inhalt Einleitung 2 1 Koordinatensysteme 2 1.1 Kartesisches Koordinatensystem 2 1.2 Polarkoordinaten 3 1.3 Zusammenhang zwischen kartesischen und Polarkoordinaten 3
Vektorrechnung. 10. August Inhaltsverzeichnis. 1 Vektoren 2. 2 Grundlegende Rechenoperationen mit Vektoren 3. 3 Geometrie der Vektoren 5
 Vektorrechnung 0. August 07 Inhaltsverzeichnis Vektoren Grundlegende Rechenoperationen mit Vektoren 3 3 Geometrie der Vektoren 5 4 Das Kreuzprodukt 9 Vektoren Die reellen Zahlen R können wir uns als eine
Vektorrechnung 0. August 07 Inhaltsverzeichnis Vektoren Grundlegende Rechenoperationen mit Vektoren 3 3 Geometrie der Vektoren 5 4 Das Kreuzprodukt 9 Vektoren Die reellen Zahlen R können wir uns als eine
6 Iterationsverfahren für lineare und nichtlineare Gleichungssysteme
 6 Iterationsverfahren für lineare und nichtlineare Gleichungssysteme 6.1 Nullstellen reeller Funktionen Bemerkung 6.1 (Problemstellung) geg.: f C[a, b] ges.: x [a, b] mit f(x ) = 0 Lösungstheorie f linear
6 Iterationsverfahren für lineare und nichtlineare Gleichungssysteme 6.1 Nullstellen reeller Funktionen Bemerkung 6.1 (Problemstellung) geg.: f C[a, b] ges.: x [a, b] mit f(x ) = 0 Lösungstheorie f linear
1 Einleitung Historie Elemente der Mehrkörperdynamik Anwendungsgebiete... 3 Literatur... 4
 Inhaltsverzeichnis 1 Einleitung... 1 1.1 Historie... 1 1.2 Elemente der Mehrkörperdynamik... 2 1.3 Anwendungsgebiete... 3 Literatur... 4 2 Dynamik des starren Körpers... 5 2.1 Lagebeschreibung... 6 2.1.1
Inhaltsverzeichnis 1 Einleitung... 1 1.1 Historie... 1 1.2 Elemente der Mehrkörperdynamik... 2 1.3 Anwendungsgebiete... 3 Literatur... 4 2 Dynamik des starren Körpers... 5 2.1 Lagebeschreibung... 6 2.1.1
Universität Tübingen Tübingen, den Mathematisches Institut D. Mansour, J. Seyrich
 Universität Tübingen Tübingen, den 03.07.2013 Mathematisches Institut D. Mansour, J. Seyrich Probeklausur zu Algorithmen der Numerischen Mathematik SS 2013 ID Nummer: 1 Name:.........................................
Universität Tübingen Tübingen, den 03.07.2013 Mathematisches Institut D. Mansour, J. Seyrich Probeklausur zu Algorithmen der Numerischen Mathematik SS 2013 ID Nummer: 1 Name:.........................................
Steuerung serieller Manipulatoren
 Klaus Janschek Steuerung serieller Manipulatoren Sommersemester 2014 K. Janschek - SS 2014 Inhalt, Literatur & Ablauf 0 INHALT RS01 EINFÜHRUNG INDUSTRIEROBOTIK 1.1 Robotersysteme Begriffsbestimmung 1.2
Klaus Janschek Steuerung serieller Manipulatoren Sommersemester 2014 K. Janschek - SS 2014 Inhalt, Literatur & Ablauf 0 INHALT RS01 EINFÜHRUNG INDUSTRIEROBOTIK 1.1 Robotersysteme Begriffsbestimmung 1.2
Mathematische Grundlagen für die Vorlesung. Differentialgeometrie
 Mathematische Grundlagen für die Vorlesung Differentialgeometrie Dr. Gabriele Link 13.10.2010 In diesem Text sammeln wir die nötigen mathematischen Grundlagen, die wir in der Vorlesung Differentialgeometrie
Mathematische Grundlagen für die Vorlesung Differentialgeometrie Dr. Gabriele Link 13.10.2010 In diesem Text sammeln wir die nötigen mathematischen Grundlagen, die wir in der Vorlesung Differentialgeometrie
Kinematik eines Massenpunktes
 12 Kinematik eines Massenpunktes Technische Mechanik Kinematik eines Massenpunktes http://wikipedia.org Relevanz von Dynamik in der Freizeit Beschleunigung: 0-172km/h in 1.8s Technische Mechanik Kinematik
12 Kinematik eines Massenpunktes Technische Mechanik Kinematik eines Massenpunktes http://wikipedia.org Relevanz von Dynamik in der Freizeit Beschleunigung: 0-172km/h in 1.8s Technische Mechanik Kinematik