Univ.-Prof. Dr.-Ing. Prof. h.c. Dr. h.c. Torsten Bertram. Univ.-Prof. Dr. phil. Johannes Weyer. GF André Bubenzer
|
|
|
- Britta Ursler
- vor 6 Jahren
- Abrufe
Transkript
1 Fachtagung Automatisiertes und vernetztes Fahren Berlin, Holistisches Modell zur Beschreibung der Aufgabenverteilung und der Aufgabenübergabe zwischen menschlichem Fahrer und Fahrerassistenzsystem beim automatisierten und vernetzten Fahren MoFFa Univ.-Prof. Dr.-Ing. Prof. h.c. Dr. h.c. Torsten Bertram Univ.-Prof. Dr. phil. Johannes Weyer GF André Bubenzer



2 Auto-Pilot, Auto-Kapitän, Auto-Fahrer Mensch: Berufsausbildung Ausbildung/ Training auf ein Flugzeug, Schiff Vorgabe von Handlungsmustern Maschine: Arbeitsplatz manuell/ automatisiert Überwachung durch Dritte (z.b. über Radar) Regelmäßige Instandhaltung Mensch und Maschine: Führerschein +? Auto oder Wohnzimmer? TÜV?

3 Übergabe der Fahrfunktion Stand der Technik / Autonomes Fahren im Audi A7
 Erste Fahrt mit dem")
4 Übergabe der Fahrfunktion Stand der Technik Auto Bild / Audi A8 (2018) Erste Fahrt mit dem Staupilot
5 Übergabe der Fahrfunktion Stand der Technik Auto Bild / Audi A8 (2018) Erste Fahrt mit dem Staupilot
 Erste Fahrt mit dem")
6 Übergabe der Fahrfunktion Stand der Technik Auto Bild / Audi A8 (2018) Erste Fahrt mit dem Staupilot






7 Forschungskonsortium MoFFa Lehrstuhl für Regelungssystemtechnik: Regelung, Modellbildung, Optimierung x-in-the-loop Simulation Automatisierte Fahrfunktionen Fachgebiet Techniksoziologie: Mensch-Maschine-Interaktion Fahrertypisierung Probandenstudien Forschungs- und Technologiezentrum Ladungssicherung Selm ggmbh: Fahrdynamik-Testgelände Realistische Nachbildung von Szenarien
8 Gliederung Forschungsvorhaben Theoretische Aufarbeitung: Fahrertyp, Fahrerstatus, Koordinator Entwicklung eines holistisches Modells Entwicklung von Fahraufgaben auf Modellbasis Testreihen mit Probanden: Simulator Testreihen mit Probanden: Reale Verkehrssituationen Finales Modell Transfer in die Praxis
9 Fahrertyp + Fahrerzustand = Fahrermodell Fahrstil Persönlichkeit Risikobereitschaft Selbsteinschätzung Sensation Seeking (Nervenkitzel, Erfahrungen, Enthemmung, Langeweile) Kontrollbedürfnis Fahrkompetenz Fahrerfahrung Wahrnehmung Fahrfähigkeit Fehleranfälligkeit Sicherheitskompetenz Weitere Faktoren Technikaffinität Technikakzeptanz Kontrollüberzeugung Mentales Modell User Experience Intrinsische Motivation Fahrerzustand motorisch sensorisch kognitiv Fahrertyp Fahrermodell



10 Fahrerzustand Skelett-Tracking Eye-Tracking EEG, EKG, Motorischer Zustand Sensorischer Zustand Kognitiver Zustand Fahrerzustand



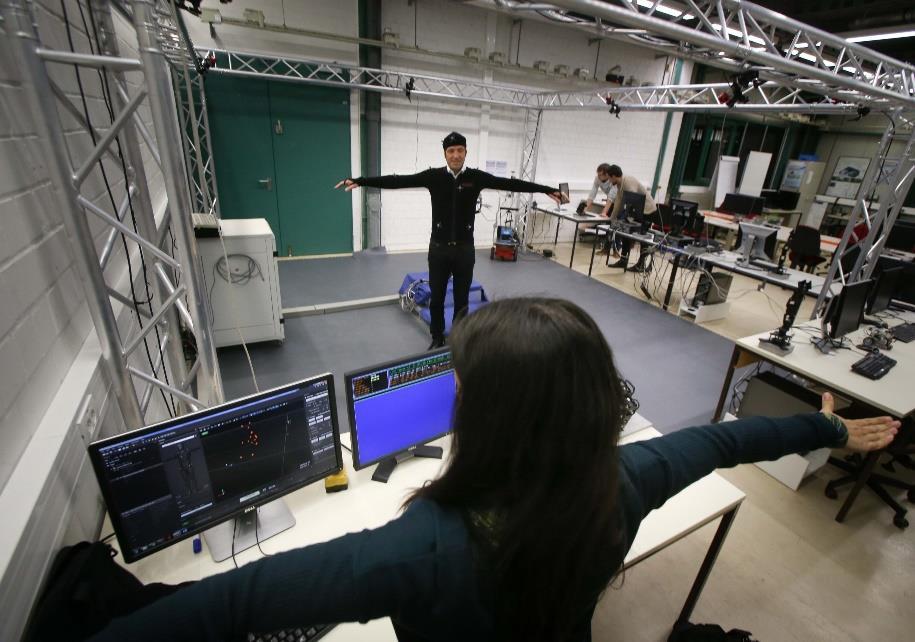

11 Motorischer Zustand Fahrerzustand Intel RealSense Tiefenkamera D435 Motion Capture System Referenzmessung
12 Umwelt (Straße, Verkehr, Witterung, ) Modellierung der Interaktionen und Interdependenzen Fahrzeugsensoren v2x-kommunikation hochgenaue Karte Umwelt Koordinator Assistenzsystem Modell Assistenzsystem Modell Fahrer (Mensch) Fahrer (Mensch) Fahraufgabe / Fahrzeug

13 Probandenstudie im Fahrsimulator


 Erprobung von Missbrauchsszenarien")
14 Probandenstudie im Fahrversuch Fahrdynamik-Testgelände: Realistische Nachbildung von Fahrszenarien Berücksichtigung verschiedener Randbedingungen (z.b. Witterung, ) Erprobung von Missbrauchsszenarien Versuche in der erweiterten Realität (Augmented Reality Brille)






15 Wissenschaftlicher Beirat Forschungskonsortium MoFFa Deutsches Zentrum für Luft- und Raumfahrt e.v. Institut für Verkehrssystemtechnik: PD Dr. Meike Jipp, Human Factors, Testen Hella KGaA Hueck & Co Geschäftsbereich Elektronik: Dr. Michael Schilling, Automated Driving ZF Group Active & Passive Safety Technology Dr. Karl-Heinz Glander, Automated Driving & Integral Cognitive Safety DBS Systems Engineering GmbH: Dr. Daniel Bandow, Systemanalyse, -entwurf, Arbeitswissenschaft, Innovationsmanagement
16 Fachtagung Automatisiertes und vernetztes Fahren Berlin, Vielen Dank für Ihre Aufmerksamkeit und Ihr Interesse! Univ.-Prof. Dr.-Ing. Prof. h.c. Dr. h.c. Torsten Bertram Univ.-Prof. Dr. phil. Johannes Weyer GF André Bubenzer
Digitaler Knoten 4.0
 Digitaler Knoten 4.0 Gestaltung und Regelung städtischer Knotenpunkte für sicheres und effizientes, automatisiertes Fahren im gemischten Verkehr 01.12.2017 Fachtagung Automatisiertes und vernetztes Fahren
Digitaler Knoten 4.0 Gestaltung und Regelung städtischer Knotenpunkte für sicheres und effizientes, automatisiertes Fahren im gemischten Verkehr 01.12.2017 Fachtagung Automatisiertes und vernetztes Fahren
Effekte längerer Automatisierung: Vigilanz und Müdigkeit
 AUDI: Veronika Weinbeer BASt: Alexander Frey BMW: Oliver Jarosch TUM LfE: Jonas Radlmayr BASt: Alexander Frey AUDI: Veronika Weinbeer BMW: Oliver Jarosch TUM LfE: Jonas Radlmayr 2 Warum spielt eine wichtige
AUDI: Veronika Weinbeer BASt: Alexander Frey BMW: Oliver Jarosch TUM LfE: Jonas Radlmayr BASt: Alexander Frey AUDI: Veronika Weinbeer BMW: Oliver Jarosch TUM LfE: Jonas Radlmayr 2 Warum spielt eine wichtige
Multitasking Ablenkungen beim Autofahren
 Seminar Ingenieurpsychologie am 23.06.2014 bei Dr. Romy Müller Multitasking Ablenkungen beim Autofahren Referentin: Teresa Janosch Gliederung 1) Definition Multitasking 2) Formen der Ablenkung beim Autofahren
Seminar Ingenieurpsychologie am 23.06.2014 bei Dr. Romy Müller Multitasking Ablenkungen beim Autofahren Referentin: Teresa Janosch Gliederung 1) Definition Multitasking 2) Formen der Ablenkung beim Autofahren
Mikrosimulation im Fahrsimulator Modellierung des Umgebungsverkehrs mit Hilfe von PTV Vissim
 Mikrosimulation im Fahrsimulator Modellierung des Umgebungsverkehrs mit Hilfe von PTV Vissim Dipl.-Wirt.-Ing. Eugen Diner Dipl.-Ing. Christian Busen Institut für Straßenwesen RWTH Aachen University Einsatzziele
Mikrosimulation im Fahrsimulator Modellierung des Umgebungsverkehrs mit Hilfe von PTV Vissim Dipl.-Wirt.-Ing. Eugen Diner Dipl.-Ing. Christian Busen Institut für Straßenwesen RWTH Aachen University Einsatzziele
Master Automotive Systems
 Master Automotive Systems Prof. Dr.-Ing. Clemens Gühmann Technische Universität Berlin School IV Electrical Engineering and Computer Science Departement of Energy and Automation Technology Überblick Motivation
Master Automotive Systems Prof. Dr.-Ing. Clemens Gühmann Technische Universität Berlin School IV Electrical Engineering and Computer Science Departement of Energy and Automation Technology Überblick Motivation
> FiF HZE > Köster Einleitung > Next Generation Car Schwerpunkt: Intelligente Fahrzeuge im städtischen Verkehr Prof. Dr.
 DLR.de Folie 1 Next Generation Car Schwerpunkt: Intelligente Fahrzeuge im städtischen Verkehr Prof. Dr. Frank Köster DLR.de Folie 2 Deutsches Zentrum für Luft- und Raumfahrt e.v. (DLR) Forschungsschwerpunkte
DLR.de Folie 1 Next Generation Car Schwerpunkt: Intelligente Fahrzeuge im städtischen Verkehr Prof. Dr. Frank Köster DLR.de Folie 2 Deutsches Zentrum für Luft- und Raumfahrt e.v. (DLR) Forschungsschwerpunkte
Systemkonzept eines modularen HiL-Systems für modellbasierte Funktionsentwicklung fahrzeugmechatronischer Systeme
 Systemkonzept eines modularen HiL-Systems für modellbasierte Funktionsentwicklung fahrzeugmechatronischer Systeme Workshop der ASIM/GI-Fachgruppen, 09./10.03.2017, Ulm Prof. Dr.-Ing. X. Liu-Henke M.Eng.
Systemkonzept eines modularen HiL-Systems für modellbasierte Funktionsentwicklung fahrzeugmechatronischer Systeme Workshop der ASIM/GI-Fachgruppen, 09./10.03.2017, Ulm Prof. Dr.-Ing. X. Liu-Henke M.Eng.
The expert forum for virtual test driving September 2018 in Karlsruhe
 The expert forum for virtual test driving 11. 12. September 2018 in Karlsruhe Herzlich willkommen zur Apply & Innovate 2018 Wir erleben gerade die wohl spannendste Zeit in der Automobilindustrie seit Jahrzehnten.
The expert forum for virtual test driving 11. 12. September 2018 in Karlsruhe Herzlich willkommen zur Apply & Innovate 2018 Wir erleben gerade die wohl spannendste Zeit in der Automobilindustrie seit Jahrzehnten.
Entwicklung eines fahrerbasierten Werkzeugs zur Objektivierung subjektiver Fahreindrücke. DGLR/FKFS Workshop Dr.-Ing. Christian Schimmel,
 Entwicklung eines fahrerbasierten Werkzeugs zur Objektivierung subjektiver Fahreindrücke DGLR/FKFS Workshop Dr.-Ing. Christian Schimmel, 11.05.2011 Die folgenden Unterlagen entstammen der Promotion des
Entwicklung eines fahrerbasierten Werkzeugs zur Objektivierung subjektiver Fahreindrücke DGLR/FKFS Workshop Dr.-Ing. Christian Schimmel, 11.05.2011 Die folgenden Unterlagen entstammen der Promotion des
Automatisiertes Fahren im Individualverkehr
 Stadt Ingolstadt Oberbürgermeister Dr. Christian Lösel Dr. Miklos Kiss Automatisiertes Fahren im Individualverkehr Perspektiven aus Ingolstädter Sicht 1 Unterschied zwischen Traum und Realität 2 Wünsche
Stadt Ingolstadt Oberbürgermeister Dr. Christian Lösel Dr. Miklos Kiss Automatisiertes Fahren im Individualverkehr Perspektiven aus Ingolstädter Sicht 1 Unterschied zwischen Traum und Realität 2 Wünsche
Für eine sichere Welt
 Safety first was tun im Notfall? Bitte sprechen Sie die folgenden Punkte vor Ihrer Präsentation an und lassen Sie sich Fluchtpläne zur Darstellung geben. 1. Ruhe bewahren. 2. Brandmelder betätigen. 3.
Safety first was tun im Notfall? Bitte sprechen Sie die folgenden Punkte vor Ihrer Präsentation an und lassen Sie sich Fluchtpläne zur Darstellung geben. 1. Ruhe bewahren. 2. Brandmelder betätigen. 3.
Vertiefungsrichtung Mechatronik
 Was? Wer? Maschinenbau und Verfahrenstechnik Vertiefungsrichtung Mechatronik Wie? Was kommt dann? Institut für Mechatronik und Systemdynamik Prof. Dr.-Ing. A. Kecskeméthy Prof. Dr.-Ing. W. Kowalczyk Prof.
Was? Wer? Maschinenbau und Verfahrenstechnik Vertiefungsrichtung Mechatronik Wie? Was kommt dann? Institut für Mechatronik und Systemdynamik Prof. Dr.-Ing. A. Kecskeméthy Prof. Dr.-Ing. W. Kowalczyk Prof.
Forschung für die Bahn der Zukunft DLR-Institut für Verkehrssystemtechnik
 Forschung für die Bahn der Zukunft DLR-Institut für Verkehrssystemtechnik Forschung für die Bahn der Zukunft > 14. Januar 2010 > Folie 1 Das Deutsche Zentrum für Luft- und Raumfahrt e.v. in der Helmholtz-Gemeinschaft
Forschung für die Bahn der Zukunft DLR-Institut für Verkehrssystemtechnik Forschung für die Bahn der Zukunft > 14. Januar 2010 > Folie 1 Das Deutsche Zentrum für Luft- und Raumfahrt e.v. in der Helmholtz-Gemeinschaft
Untersuchung von komplexen Problemstellungen bei der Bahn
 Untersuchung von komplexen Problemstellungen bei der Bahn Einführung zur Präsentation von Diplomarbeiten der FHNW, 22. August 2013 1. Einführung Verkehr als komplexes System Die Systemelemente sind nicht
Untersuchung von komplexen Problemstellungen bei der Bahn Einführung zur Präsentation von Diplomarbeiten der FHNW, 22. August 2013 1. Einführung Verkehr als komplexes System Die Systemelemente sind nicht
Vertiefungsrichtung Mechatronik
 Was? Wer? Maschinenbau und Verfahrenstechnik Vertiefungsrichtung Mechatronik Wie? Was kommt dann? Institut für Mechatronik und Systemdynamik Prof. Dr.-Ing. A. Kecskemethy Prof. Dr.-Ing. W. Kowalczyk Prof.
Was? Wer? Maschinenbau und Verfahrenstechnik Vertiefungsrichtung Mechatronik Wie? Was kommt dann? Institut für Mechatronik und Systemdynamik Prof. Dr.-Ing. A. Kecskemethy Prof. Dr.-Ing. W. Kowalczyk Prof.
Produktentstehung am Beispiel integrativer Ansätze Prof. Albert Albers
 Produktentstehung am Beispiel integrativer Ansätze Prof. Albert Albers IPEK Institut t für Produktentwicklung t kl IMF3 1 24.03.2010 KIT Universität des Landes Baden-Württemberg und nationales Forschungszentrum
Produktentstehung am Beispiel integrativer Ansätze Prof. Albert Albers IPEK Institut t für Produktentwicklung t kl IMF3 1 24.03.2010 KIT Universität des Landes Baden-Württemberg und nationales Forschungszentrum
Modellierung und Bewertung kognitiver Aspekte der Aufgaben eines Fahrers
 der Aufgaben eines Fahrers Oliver Sträter Technische Universität München straeter@lfe.mw.tum.de www.lfe.mw.tum.de/~straeter 1 Assistenzsysteme im Fahrzeug Ziel: Ort, Zeit + + + Ist: Ort, Zeit - - - Navigation
der Aufgaben eines Fahrers Oliver Sträter Technische Universität München straeter@lfe.mw.tum.de www.lfe.mw.tum.de/~straeter 1 Assistenzsysteme im Fahrzeug Ziel: Ort, Zeit + + + Ist: Ort, Zeit - - - Navigation
1.4! Einführung. Systemmodellierung. Methoden und Werkzeuge
 Einführung. Vorbemerkungen und Überblick. Die elektronischen e des Fahrzeugs. Prozesse in der Fahrzeugentwicklung im Überblick,.4 Grundlagen. Steuerungs- und regelungstechnische e (Prof. Schumacher). Diskrete
Einführung. Vorbemerkungen und Überblick. Die elektronischen e des Fahrzeugs. Prozesse in der Fahrzeugentwicklung im Überblick,.4 Grundlagen. Steuerungs- und regelungstechnische e (Prof. Schumacher). Diskrete
Der Mensch als Vorbild für intelligente Assistenz -Transfer von Fertigkeiten -
 Der Mensch als Vorbild für intelligente Assistenz -Transfer von Fertigkeiten - Umwelt(-modell) zb. Strassenverkehr + Auto Oldenburg - Stadt der Wissenschaft Perspektivenwechsel 02.11.2009 Operator(-modell)
Der Mensch als Vorbild für intelligente Assistenz -Transfer von Fertigkeiten - Umwelt(-modell) zb. Strassenverkehr + Auto Oldenburg - Stadt der Wissenschaft Perspektivenwechsel 02.11.2009 Operator(-modell)
Anwendungsplattform Intelligente Mobilität
 Anwendungsplattform Intelligente Mobilität Dipl.-Ing. Markus Pelz Institut für Verkehrssystemtechnik 2. Februar 2011 > Folie 1 Institut für Verkehrssystemtechnik Sitz: Braunschweig, Berlin Seit: 2001 Leitung:
Anwendungsplattform Intelligente Mobilität Dipl.-Ing. Markus Pelz Institut für Verkehrssystemtechnik 2. Februar 2011 > Folie 1 Institut für Verkehrssystemtechnik Sitz: Braunschweig, Berlin Seit: 2001 Leitung:
Verkehrsforschung für den Menschen Für mehr Sicherheit und Effizienz des Verkehrs
 Verkehrsforschung für den Menschen Für mehr Sicherheit und Effizienz des Verkehrs Prof. Dr.-Ing. Karsten Lemmer DLR, Verkehrsforschung für den Menschen > 22. Mai 2007 > Folie 1 Sitz: Braunschweig, Berlin
Verkehrsforschung für den Menschen Für mehr Sicherheit und Effizienz des Verkehrs Prof. Dr.-Ing. Karsten Lemmer DLR, Verkehrsforschung für den Menschen > 22. Mai 2007 > Folie 1 Sitz: Braunschweig, Berlin
Kompetenzatlas Fahrsimulation
 Kompetenzatlas Fahrsimulation Dr. Christoph Runde Virtual Dimension Center (VDC) Fellbach Alexander F. Walser Automotive Simulation Center Stuttgart Maik Auricht Technische Universität Berlin Kompetenzzentrum
Kompetenzatlas Fahrsimulation Dr. Christoph Runde Virtual Dimension Center (VDC) Fellbach Alexander F. Walser Automotive Simulation Center Stuttgart Maik Auricht Technische Universität Berlin Kompetenzzentrum
Vom virtuellen Prototyp zum digitalen Zwilling
 Vom virtuellen Prototyp zum digitalen Zwilling Dr. Markus Schörgenhumer Area Mechanics and Control markus.schoergenhumer@lcm.at Seite 1 Inhaltsüberblick Einführung Modellbasierte Entwicklung und virtuelle
Vom virtuellen Prototyp zum digitalen Zwilling Dr. Markus Schörgenhumer Area Mechanics and Control markus.schoergenhumer@lcm.at Seite 1 Inhaltsüberblick Einführung Modellbasierte Entwicklung und virtuelle
Automatisiertes Fahren
 www.avq.eu Automatisiertes Fahren Warum voll automatisiert nur elektrisch geht und die sicheren Zustände und Herausforderungen von voll automatisierten E-Fahrzeugsystemen Public 1.3.2016 Public - Folie
www.avq.eu Automatisiertes Fahren Warum voll automatisiert nur elektrisch geht und die sicheren Zustände und Herausforderungen von voll automatisierten E-Fahrzeugsystemen Public 1.3.2016 Public - Folie
ES-Projektseminar (SS 2012)
") ES-Projektseminar (SS 2012) Endvortrag Team Justice League of America Dominik Matthias [Team ] Pascal Stephen Vorname Name; ES Real-Time Systems Lab Prof. Dr. rer. nat. Andy Schürr Dept. of Electrical
ES-Projektseminar (SS 2012) Endvortrag Team Justice League of America Dominik Matthias [Team ] Pascal Stephen Vorname Name; ES Real-Time Systems Lab Prof. Dr. rer. nat. Andy Schürr Dept. of Electrical
Rechtliche Rahmenbedingungen zur Genehmigung und Prüfung von AVF Wirtschaftskammer Österreich - Österreich als Testregion für automatisiertes Fahren
 Rechtliche Rahmenbedingungen zur Genehmigung und Prüfung von AVF Wirtschaftskammer Österreich - Österreich als Testregion für automatisiertes Fahren Dipl.-Ing. Jürgen Bönninger, Zentrale Stelle nach StVG
Rechtliche Rahmenbedingungen zur Genehmigung und Prüfung von AVF Wirtschaftskammer Österreich - Österreich als Testregion für automatisiertes Fahren Dipl.-Ing. Jürgen Bönninger, Zentrale Stelle nach StVG
AUTONOMES FAHREN TRENDS UND HERAUSFORDERUNGEN IN DER IKT FORSCHUNG
 AUTONOMES FAHREN TRENDS UND HERAUSFORDERUNGEN IN DER IKT FORSCHUNG Prof. Dr. Ing. J. Marius Zöllner FZI Forschungszentrum Informatik am Karlsruher Institut für Technologie FZI FORSCHUNGSZENTRUM INFORMATIK
AUTONOMES FAHREN TRENDS UND HERAUSFORDERUNGEN IN DER IKT FORSCHUNG Prof. Dr. Ing. J. Marius Zöllner FZI Forschungszentrum Informatik am Karlsruher Institut für Technologie FZI FORSCHUNGSZENTRUM INFORMATIK
Wer fährt? Möglichkeiten und Grenzen von Fahrerinformations- und Fahrerassistenzsystemen
 Wer fährt? Möglichkeiten und Grenzen von Fahrerinformations- und Fahrerassistenzsystemen Prof. Dr. J. Krems TU- Chemnitz krems@psychologie.tu-chemnitz.de Übersicht 1. Information, Assistenz, Automatisierung
Wer fährt? Möglichkeiten und Grenzen von Fahrerinformations- und Fahrerassistenzsystemen Prof. Dr. J. Krems TU- Chemnitz krems@psychologie.tu-chemnitz.de Übersicht 1. Information, Assistenz, Automatisierung
Kraftstoffeffizientes Fahren Wie kann dies erreicht werden?
 Stadtgerechte Mensch-Maschine- Interaktion (MMI) MMI-Konzepte für eine automatisierte, kraftstoffeffiziente Fahrzeuglängsführung im Lkw S. Stockert a, Dr. S. Weise b, Dr. B. Michel b, A. Zimmermann b a
Stadtgerechte Mensch-Maschine- Interaktion (MMI) MMI-Konzepte für eine automatisierte, kraftstoffeffiziente Fahrzeuglängsführung im Lkw S. Stockert a, Dr. S. Weise b, Dr. B. Michel b, A. Zimmermann b a
Elastische Roboter. Dortmunder Regelungstechnische Kolloquien, 28. Januar 2010
 Dortmunder Regelungstechnische Kolloquien, 28. Januar 2010 Elastische Roboter Jörn Malzahn, Rene Franke, Anh Son Phung, Frank Hoffmann, Torsten Bertram Univ.-Prof. Dr.-Ing. Prof. h.c. Torsten Bertram Lehrstuhl
Dortmunder Regelungstechnische Kolloquien, 28. Januar 2010 Elastische Roboter Jörn Malzahn, Rene Franke, Anh Son Phung, Frank Hoffmann, Torsten Bertram Univ.-Prof. Dr.-Ing. Prof. h.c. Torsten Bertram Lehrstuhl
Zukunft durch Forschung gestalten
 Systeme Methoden Prozesse Zukunft durch Forschung gestalten Integrierte t Validierungsumgebung für energieeffiziente i Fahrerassistenzsysteme am Rollenprüfstand apply and innovate! IPG Technology Conference
Systeme Methoden Prozesse Zukunft durch Forschung gestalten Integrierte t Validierungsumgebung für energieeffiziente i Fahrerassistenzsysteme am Rollenprüfstand apply and innovate! IPG Technology Conference
Digitale Technologien für neue Mobilitätslösungen
 Digitale Technologien für neue Mobilitätslösungen Kick-off der Themenplattform Vernetzte Mobilität Reinhard German 9.3.2016, Garching Informatik 7 Rechnernetze und Kommunikationssysteme Digitalisierung
Digitale Technologien für neue Mobilitätslösungen Kick-off der Themenplattform Vernetzte Mobilität Reinhard German 9.3.2016, Garching Informatik 7 Rechnernetze und Kommunikationssysteme Digitalisierung
FORSCHUNGS- UND TECHNOLOGIEZENTRUM LADUNGSSICHERUNG SELM ggmbh
 FORSCHUNGS- UND TECHNOLOGIEZENTRUM LADUNGSSICHERUNG SELM ggmbh DAS INSTITUT EUROPAS MODERNSTES FREILUFT-FORSCHUNGSLABOR FÜR LADUNGSSICHERUNG 123.500 Quadratmeter oder umgerechnet 25 Fußballfelder umfasst
FORSCHUNGS- UND TECHNOLOGIEZENTRUM LADUNGSSICHERUNG SELM ggmbh DAS INSTITUT EUROPAS MODERNSTES FREILUFT-FORSCHUNGSLABOR FÜR LADUNGSSICHERUNG 123.500 Quadratmeter oder umgerechnet 25 Fußballfelder umfasst
Ergänzung von Lehrveranstaltungen durch Videoaufzeichnungen und 3D-Präsentationen sowie zugehörige Infrastrukturen und Services
 Ergänzung von Lehrveranstaltungen durch Videoaufzeichnungen und 3D-Präsentationen sowie zugehörige Infrastrukturen und Services Workshop E-Learning-Aktivitäten in der Math.-Nat. Fakultät 09.07.2009 Univ.-Prof.
Ergänzung von Lehrveranstaltungen durch Videoaufzeichnungen und 3D-Präsentationen sowie zugehörige Infrastrukturen und Services Workshop E-Learning-Aktivitäten in der Math.-Nat. Fakultät 09.07.2009 Univ.-Prof.
SeniorInnen als FahrzeuglenkerInnen
 SeniorInnen als FahrzeuglenkerInnen Traumabiomechanik und Fahreignung Prof. Dr. med. Felix Walz PD Dr. techn. Kai-Uwe Schmitt Dr. med. Kerstin Furter Arbeitsgruppe für Unfallmechanik (AGU Zürich) 1 Alte
SeniorInnen als FahrzeuglenkerInnen Traumabiomechanik und Fahreignung Prof. Dr. med. Felix Walz PD Dr. techn. Kai-Uwe Schmitt Dr. med. Kerstin Furter Arbeitsgruppe für Unfallmechanik (AGU Zürich) 1 Alte
Automatisiertes Fahren Entwicklungen und Herausforderungen
 Automatisiertes Fahren Entwicklungen und Herausforderungen Dr. Anton Fuchs VIRTUAL VEHICLE Research Center GSV Forum, 09.05.2017 VIRTUAL VEHICLE Inhalte Warum ist automatisiertes Fahren ein wesentliches
Automatisiertes Fahren Entwicklungen und Herausforderungen Dr. Anton Fuchs VIRTUAL VEHICLE Research Center GSV Forum, 09.05.2017 VIRTUAL VEHICLE Inhalte Warum ist automatisiertes Fahren ein wesentliches
Analyse und Konzeptionen von Lösungen für das Verdeckungsproblem in komponentenbasierten Mixed Reality- Applikationen
 Analyse und Konzeptionen von Lösungen für das Verdeckungsproblem in komponentenbasierten Mixed Reality- Applikationen Vortrag zur Diplomarbeit von Sönke Dirksen am Professur für Graphische Datenverarbeitung
Analyse und Konzeptionen von Lösungen für das Verdeckungsproblem in komponentenbasierten Mixed Reality- Applikationen Vortrag zur Diplomarbeit von Sönke Dirksen am Professur für Graphische Datenverarbeitung
Intelligentes Energiemanagement für elektrisch angetriebene Fahrzeuge 08.12.2015 Julian Eckstein. www.its-owl.de
 Intelligentes Energiemanagement für elektrisch angetriebene Fahrzeuge 08.12.2015 Julian Eckstein Gliederung 1. Innovationsprojekt ReelaF Zielsetzung Motivation 2. Arbeitspaket 5: Energiemanagement Konzept
Intelligentes Energiemanagement für elektrisch angetriebene Fahrzeuge 08.12.2015 Julian Eckstein Gliederung 1. Innovationsprojekt ReelaF Zielsetzung Motivation 2. Arbeitspaket 5: Energiemanagement Konzept
(Bild: gov.uk) Prof. Bernhard Schlag 1
 Prof. Bernhard Schlag 1") Prof. Dr. Bernhard Schlag, TU Dresden, Verkehrspsychologie Autonom unterwegs Ist der Mensch bereit, das Fahren der Maschine zu überlassen? 13. Hessischer Mobilitätskongress, Frankfurt/M., 18.9.2015 (Bild:
Prof. Dr. Bernhard Schlag, TU Dresden, Verkehrspsychologie Autonom unterwegs Ist der Mensch bereit, das Fahren der Maschine zu überlassen? 13. Hessischer Mobilitätskongress, Frankfurt/M., 18.9.2015 (Bild:
Ressourcenschutz in der Arbeitswelt der Zukunft
 Ressourcenschutz in der Arbeitswelt der Zukunft Gabriele Bleser Deutsches Forschungszentrum für Künstliche Intelligenz GmbH augmentedvision DFKI und Augmented Vision augmentedvision Deutsches Forschungszentrum
Ressourcenschutz in der Arbeitswelt der Zukunft Gabriele Bleser Deutsches Forschungszentrum für Künstliche Intelligenz GmbH augmentedvision DFKI und Augmented Vision augmentedvision Deutsches Forschungszentrum
Nutzung von virtuellen Stadtmodellen für neue Technologien
 Nutzung von virtuellen Stadtmodellen für neue Technologien Die Nutzung von Konzept Demonstratoren um neue Wege für die Mensch-Maschine-Schnittstelle zu finden Leonhard Vogelmeier 6 April 2017 Gliederung
Nutzung von virtuellen Stadtmodellen für neue Technologien Die Nutzung von Konzept Demonstratoren um neue Wege für die Mensch-Maschine-Schnittstelle zu finden Leonhard Vogelmeier 6 April 2017 Gliederung
Zufall Wildunfall? Wahrnehmungsgrenzen im Straßenverkehr. 2. Wildunfalltagung in Grevenbroich Referent: Ulrich Chiellino
 Zufall Wildunfall? Wahrnehmungsgrenzen im Straßenverkehr 2. Wildunfalltagung in Grevenbroich Referent: Ulrich Chiellino Wir machen Mobilität sicher Inhalt: Unfallursachenanalyse Grenzen der Wahrnehmung
Zufall Wildunfall? Wahrnehmungsgrenzen im Straßenverkehr 2. Wildunfalltagung in Grevenbroich Referent: Ulrich Chiellino Wir machen Mobilität sicher Inhalt: Unfallursachenanalyse Grenzen der Wahrnehmung
Analyse des Fahrereinflusses auf den Energieverbrauch von konventionellen und Hybridfahrzeugen mittels Fahrversuch und interaktiver Simulation
 Analyse des Fahrereinflusses auf den Energieverbrauch von konventionellen und Hybridfahrzeugen mittels Fahrversuch und interaktiver Simulation Gerd Baumann, Philip Rumbolz, Anne Piegsa, Michael Grimm,
Analyse des Fahrereinflusses auf den Energieverbrauch von konventionellen und Hybridfahrzeugen mittels Fahrversuch und interaktiver Simulation Gerd Baumann, Philip Rumbolz, Anne Piegsa, Michael Grimm,
Bewertung der höheren Ebenen der GDE-Matrix in der Praktischen Fahrerlaubnisprüfung in den Niederlanden Han Rietman, CBR (NL)
") Bewertung der höheren Ebenen der GDE-Matrix in der Praktischen Fahrerlaubnisprüfung in den Niederlanden Han Rietman, CBR (NL) 4. Sachverständigentag Berlin, 1. und 2. März 2010 GDE-Matrix [ Goals for Driver
Bewertung der höheren Ebenen der GDE-Matrix in der Praktischen Fahrerlaubnisprüfung in den Niederlanden Han Rietman, CBR (NL) 4. Sachverständigentag Berlin, 1. und 2. März 2010 GDE-Matrix [ Goals for Driver
Methoden der Usability Evaluation
 Florian Sarodnick / Henning Brau Methoden der Usability Evaluation Wissenschaftliche Grundlagen und praktische Anwendung 2., überarbeitete und aktualisierte Auflage Verlag Hans Huber Inhaltsverzeichnis
Florian Sarodnick / Henning Brau Methoden der Usability Evaluation Wissenschaftliche Grundlagen und praktische Anwendung 2., überarbeitete und aktualisierte Auflage Verlag Hans Huber Inhaltsverzeichnis
Möglichst wenig Lenken!
 Modellierung des en wissenschaftlicher Selbstzweck oder realer Bedarf? Holger Duda, DLR Institut für Flugsystemtechnik DGLR Fachausschuss L6.2 Flugeigenschaften und Flugversuch, Manching 11.5.2011 Gemeinsame
Modellierung des en wissenschaftlicher Selbstzweck oder realer Bedarf? Holger Duda, DLR Institut für Flugsystemtechnik DGLR Fachausschuss L6.2 Flugeigenschaften und Flugversuch, Manching 11.5.2011 Gemeinsame
Erweiterung eines Verfahrens zur automatisierten Parameteridentifikation eines Fahrzeugmodells
 Erweiterung eines Verfahrens zur automatisierten Parameteridentifikation eines Fahrzeugmodells Sebastian Wildfeuer Parameteridentifikation > 23. September 2008 > Folie 1 Themenübersicht Ausgangssituation,
Erweiterung eines Verfahrens zur automatisierten Parameteridentifikation eines Fahrzeugmodells Sebastian Wildfeuer Parameteridentifikation > 23. September 2008 > Folie 1 Themenübersicht Ausgangssituation,
Realer vs. simulierter Umgebungsverkehr Was bringt die vernetzte Fahrsimulation?
 UR:BAN MV SIM Realer vs. simulierter Umgebungsverkehr Was bringt die vernetzte Fahrsimulation? Dr. Dominik Mühlbacher (WIVW GmbH) Dr. Lena Rittger (Adam Opel AG) UR:BAN-Konferenz 18./19.02.2016 Garching
UR:BAN MV SIM Realer vs. simulierter Umgebungsverkehr Was bringt die vernetzte Fahrsimulation? Dr. Dominik Mühlbacher (WIVW GmbH) Dr. Lena Rittger (Adam Opel AG) UR:BAN-Konferenz 18./19.02.2016 Garching
ABLENKUNG IM STRASSENVERKEHR METHODEN ZUR MESSUNG UND BEWERTUNG DR. ROLAND SPIES, CEO
 ABLENKUNG IM STRASSENVERKEHR METHODEN ZUR MESSUNG UND BEWERTUNG DR. ROLAND SPIES, CEO AGENDA - DAS UNTERNEHMEN - BEGRIFFSDEFINITION ABLENKUNG UND MESSMETHODEN - MASSNAHMEN BEI DER ENTWICKLUNG - AUSBLICK
ABLENKUNG IM STRASSENVERKEHR METHODEN ZUR MESSUNG UND BEWERTUNG DR. ROLAND SPIES, CEO AGENDA - DAS UNTERNEHMEN - BEGRIFFSDEFINITION ABLENKUNG UND MESSMETHODEN - MASSNAHMEN BEI DER ENTWICKLUNG - AUSBLICK
Flexible Softwareentwicklung für Flugsimulatoren in der Forschung am Beispiel des Projektes Lubeta
 DLR.de Folie 1 Flexible Softwareentwicklung für Flugsimulatoren in der Forschung am Beispiel des Projektes Lubeta Jan Hettwer DLR - Institut für Flugsystemtechnik Workshop der ASIM/GI-Fachgruppen STS und
DLR.de Folie 1 Flexible Softwareentwicklung für Flugsimulatoren in der Forschung am Beispiel des Projektes Lubeta Jan Hettwer DLR - Institut für Flugsystemtechnik Workshop der ASIM/GI-Fachgruppen STS und
Ergonomie und Mensch-Maschine-Systeme (Arbeitswissenschaft II)
") Ergonomie und Mensch-Maschine-Systeme (Arbeitswissenschaft II) Aufgabenstellung zur Übung der Lehreinheit 8 Cognitive Engineering II Sommersemester 2016 Dr.-Ing. Dr. rer. medic. Dipl.-Inform. Alexander
Ergonomie und Mensch-Maschine-Systeme (Arbeitswissenschaft II) Aufgabenstellung zur Übung der Lehreinheit 8 Cognitive Engineering II Sommersemester 2016 Dr.-Ing. Dr. rer. medic. Dipl.-Inform. Alexander
Nutzerakzeptanz von automatisierten und vernetzten Fahrzeugen. Stefan Trommer 04. Juli 2017
 Nutzerakzeptanz von automatisierten und vernetzten Fahrzeugen Stefan Trommer 04. Juli 2017 DLR.de Folie 2 Gliederung Erwartete Wirkungen des autonomen Fahrens Treiber und Hemmnisse aus Nutzersicht Neue
Nutzerakzeptanz von automatisierten und vernetzten Fahrzeugen Stefan Trommer 04. Juli 2017 DLR.de Folie 2 Gliederung Erwartete Wirkungen des autonomen Fahrens Treiber und Hemmnisse aus Nutzersicht Neue
Neue Herausforderungen für sicheres Verhalten im Verkehr
 Neue Herausforderungen für sicheres Verhalten im Verkehr Gregor BARTL Fahrlehrertag und Bundesfahrprüfertag 2017 22. bis 24. März 2017 Red Bull Ring, Spielberg www.alles-fuehrerschein.at 11 Unfälle von
Neue Herausforderungen für sicheres Verhalten im Verkehr Gregor BARTL Fahrlehrertag und Bundesfahrprüfertag 2017 22. bis 24. März 2017 Red Bull Ring, Spielberg www.alles-fuehrerschein.at 11 Unfälle von
Regelakzeptanz und Regelbefolgung bei der Geschwindigkeitswahl
 Fakultät Verkehrswissenschaften - Lehrstuhl für Verkehrspsychologie Regelakzeptanz und Regelbefolgung bei der Geschwindigkeitswahl 20. DVR-Forum Sicherheit und Mobilität. 18. Juni 2014 Dr. Jens Schade,
Fakultät Verkehrswissenschaften - Lehrstuhl für Verkehrspsychologie Regelakzeptanz und Regelbefolgung bei der Geschwindigkeitswahl 20. DVR-Forum Sicherheit und Mobilität. 18. Juni 2014 Dr. Jens Schade,
Die Teleoperation als Ansatz zur fahrerlosen Fahrzeugführung
 Die Teleoperation als Ansatz zur fahrerlosen Fahrzeugführung Sebastian Gnatzig, Erick Haas, Prof. Dr. Markus Lienkamp Gliederung Einleitung Stand der Technik Vorgehen Durchführung Diskussion Zusammenfassung
Die Teleoperation als Ansatz zur fahrerlosen Fahrzeugführung Sebastian Gnatzig, Erick Haas, Prof. Dr. Markus Lienkamp Gliederung Einleitung Stand der Technik Vorgehen Durchführung Diskussion Zusammenfassung
Tilman Bünte DLR Oberpfaffenhofen, Tag der offenen Tür 24. Oktober 2004
 Tilman Bünte DLR Oberpfaffenhofen, Tag der offenen Tür 24. Oktober 2004 Institut für Robotik und Mechatronik Institut für Robotik und Mechatronik 1 Mechatronik Mechanik Elektronik Software Mechatronik
Tilman Bünte DLR Oberpfaffenhofen, Tag der offenen Tür 24. Oktober 2004 Institut für Robotik und Mechatronik Institut für Robotik und Mechatronik 1 Mechatronik Mechanik Elektronik Software Mechatronik
Grobkonzept Entwicklung eines Bewegungssystems für Fahrsimulatoren
 Jürg Suter Trüelmatt 24 CH-3624 Goldiwil (Thun) Goldiwil, 17. November 2015, Version 1.0 Grobkonzept Entwicklung eines Bewegungssystems für Fahrsimulatoren 1 Inhalt 1 Problemstellung 3 1.1 Fallstudien...
Jürg Suter Trüelmatt 24 CH-3624 Goldiwil (Thun) Goldiwil, 17. November 2015, Version 1.0 Grobkonzept Entwicklung eines Bewegungssystems für Fahrsimulatoren 1 Inhalt 1 Problemstellung 3 1.1 Fallstudien...
WIE GUT MÜSSEN AUTOMATISIERTE FAHRZEUGE FAHREN?
 WIE GUT MÜSSEN AUTOMATISIERTE FAHRZEUGE FAHREN? PROJEKT ZUR ETABLIERUNG VON GENERELL AKZEPTIERTEN GÜTEKRITERIEN, WERKZEUGEN UND METHODEN SOWIE SZENARIEN UND SITUATIONEN ZUR FREIGABE HOCHAUTOMATISIERTER
WIE GUT MÜSSEN AUTOMATISIERTE FAHRZEUGE FAHREN? PROJEKT ZUR ETABLIERUNG VON GENERELL AKZEPTIERTEN GÜTEKRITERIEN, WERKZEUGEN UND METHODEN SOWIE SZENARIEN UND SITUATIONEN ZUR FREIGABE HOCHAUTOMATISIERTER
Textmasterformate durch Klicken bearbeiten
 Eröffnung Forschungsfabrik 26.9.2017 Ausgangssituation > September 2014: Gründung Institut für Intelligente Produktion (ISP) > fakultätsübergreifendes Institut (Hagenberg Steyr Wels) > zentrale Vierte
Eröffnung Forschungsfabrik 26.9.2017 Ausgangssituation > September 2014: Gründung Institut für Intelligente Produktion (ISP) > fakultätsübergreifendes Institut (Hagenberg Steyr Wels) > zentrale Vierte
in die Einführung Sportpsychologie Teili: Grundthemen Verlag Karl Hofmann Schorndorf Hartmut Gabler/Jürgen R. Nitsch / Roland Singer
 Hartmut Gabler/Jürgen R. Nitsch / Roland Singer Einführung in die Sportpsychologie Teili: Grundthemen unter Mitarbeit von Jörn Munzert Verlag Karl Hofmann Schorndorf Inhalt Einleitung 9 I. Sportpsychologie
Hartmut Gabler/Jürgen R. Nitsch / Roland Singer Einführung in die Sportpsychologie Teili: Grundthemen unter Mitarbeit von Jörn Munzert Verlag Karl Hofmann Schorndorf Inhalt Einleitung 9 I. Sportpsychologie
Institut für Arbeitswissenschaft (IAD)
") Institut für Arbeitswissenschaft (IAD) Prof. Dr.-Ing. Ralph Bruder 12. Dezember 2016 Maschinenbau Institut für Arbeitswissenschaft Prof. Dr.-Ing. Ralph Bruder 1 Institut für Arbeitswissenschaft (IAD) Leitung:
Institut für Arbeitswissenschaft (IAD) Prof. Dr.-Ing. Ralph Bruder 12. Dezember 2016 Maschinenbau Institut für Arbeitswissenschaft Prof. Dr.-Ing. Ralph Bruder 1 Institut für Arbeitswissenschaft (IAD) Leitung:
Virtuelle Präsenz: 3D-Ausgabegeräte. Oliver Hoffmann. Gliederung: CAVE TOWSIM Virtual Tübingen Fazit 1 / 29
 Virtuelle Präsenz: 3D-Ausgabegeräte Oliver Hoffmann Gliederung: CAVE TOWSIM Virtual Tübingen Fazit 1 / 29 I CAVE 2 Grundlegendes Entwickelt von der Electronic Visualization Lab 1992. Rekursives Akronym:
Virtuelle Präsenz: 3D-Ausgabegeräte Oliver Hoffmann Gliederung: CAVE TOWSIM Virtual Tübingen Fazit 1 / 29 I CAVE 2 Grundlegendes Entwickelt von der Electronic Visualization Lab 1992. Rekursives Akronym:
Kollisionsvermeidung mittels fahrzeugautarker Ortung unter Verwendung Bild gebender Verfahren und GNSS
 Kollisionsvermeidung mittels fahrzeugautarker Ortung unter Verwendung Bild gebender Verfahren und GNSS Dipl.-Ing. Markus Pelz Ansatz für eine Kollisionsvermeidung bei Eisenbahnen > POSNAV 6. 7. November
Kollisionsvermeidung mittels fahrzeugautarker Ortung unter Verwendung Bild gebender Verfahren und GNSS Dipl.-Ing. Markus Pelz Ansatz für eine Kollisionsvermeidung bei Eisenbahnen > POSNAV 6. 7. November
SITUATION AWARENESS VON LOKFÜHRENDEN BACHELORPROJEKT NICOLE STOLLER
 BACHELORPROJEKT WICHTIGSTE INHALTE Was ist Situation Awareness? Was wurde in diesem Bachelorprojekt untersucht? Welches sind die Ergebnisse? Welche Empfehlungen ergeben sich daraus? 2 AUSGANGSLAGE Fachhochschule
BACHELORPROJEKT WICHTIGSTE INHALTE Was ist Situation Awareness? Was wurde in diesem Bachelorprojekt untersucht? Welches sind die Ergebnisse? Welche Empfehlungen ergeben sich daraus? 2 AUSGANGSLAGE Fachhochschule
Wissenschaftliche Begleitforschung im Forschungsbereich Energie in Gebäuden und Quartieren
 Wissenschaftliche Begleitforschung im Forschungsbereich Quo vadis? Univ.-Prof. Dr.-Ing. Dirk Müller Motivation und Ausgangslage 2 Entwicklung von Energiekonzepten für Gebäude und Quartiere Bedarf Abbildung
Wissenschaftliche Begleitforschung im Forschungsbereich Quo vadis? Univ.-Prof. Dr.-Ing. Dirk Müller Motivation und Ausgangslage 2 Entwicklung von Energiekonzepten für Gebäude und Quartiere Bedarf Abbildung
Optimierung einer technischen Beschreibung. Martin Witzel und Peter Buck
 Optimierung einer technischen Beschreibung Martin Witzel und Peter Buck Was ist eine Bedienungsanleitung? Ein DIN A4 Zettel in 12 Sprachen für die Bedienung eines Mixers? Ein Buch mit mehr als 500 Seiten
Optimierung einer technischen Beschreibung Martin Witzel und Peter Buck Was ist eine Bedienungsanleitung? Ein DIN A4 Zettel in 12 Sprachen für die Bedienung eines Mixers? Ein Buch mit mehr als 500 Seiten
19. November 2015 Berlin. Fachtagung Möglichkeiten und Grenzen der digitalen Infrastruktur und Daseinsvorsorge
 19. November 2015 Berlin Fachtagung Möglichkeiten und Grenzen der digitalen Infrastruktur und Daseinsvorsorge Die Sicherung der Daseinsvorsorge und die Digitalisierung sind wichtige Zukunftsthemen für
19. November 2015 Berlin Fachtagung Möglichkeiten und Grenzen der digitalen Infrastruktur und Daseinsvorsorge Die Sicherung der Daseinsvorsorge und die Digitalisierung sind wichtige Zukunftsthemen für
6. Sachverständigentag
 6. Sachverständigentag Mobilität der Zukunft sicher und geprüft Fahrerassistenzsysteme in der Fahrerlaubnisprüfung Dipl.-Ing. Marcellus Kaup Leiter der Technischen Prüfstelle für den Kraftfahrzeugverkehr
6. Sachverständigentag Mobilität der Zukunft sicher und geprüft Fahrerassistenzsysteme in der Fahrerlaubnisprüfung Dipl.-Ing. Marcellus Kaup Leiter der Technischen Prüfstelle für den Kraftfahrzeugverkehr
Qualifizierung 4.0 Ausbildung der digital Natives, Weiterbildung der digital Immigrants
 RKW Sachsen- Anhalt Qualifizierung 4.0 Ausbildung der digital Natives, Weiterbildung der digital Immigrants 31. Mai 2017 / Heidi Werner 1 Ausbildung von Digital Natives Führerscheine für Auszubildende
RKW Sachsen- Anhalt Qualifizierung 4.0 Ausbildung der digital Natives, Weiterbildung der digital Immigrants 31. Mai 2017 / Heidi Werner 1 Ausbildung von Digital Natives Führerscheine für Auszubildende
Virtual Reality Heute und Morgen
 Virtual Reality Heute und Morgen Kommt das Holodeck fürs Wohnzimmer? Anton L. Fuhrmann Was ist Virtual Reality? Realität Virtuelle Realität Virtuelle Hochzeit Erwarten wir uns das von Virtual Reality?
Virtual Reality Heute und Morgen Kommt das Holodeck fürs Wohnzimmer? Anton L. Fuhrmann Was ist Virtual Reality? Realität Virtuelle Realität Virtuelle Hochzeit Erwarten wir uns das von Virtual Reality?
Unterschiedliche Automatisierungsgrade im Kraftfahrzeug: Auswirkungen auf die visuelle Aufmerksamkeit und die Kontrollübernahmefähigkeit
 Unterschiedliche Automatisierungsgrade im Kraftfahrzeug: Auswirkungen auf die visuelle Aufmerksamkeit und die Kontrollübernahmefähigkeit Matthias Heesen, Anna Schieben, Frank Flemisch Unterschiedliche
Unterschiedliche Automatisierungsgrade im Kraftfahrzeug: Auswirkungen auf die visuelle Aufmerksamkeit und die Kontrollübernahmefähigkeit Matthias Heesen, Anna Schieben, Frank Flemisch Unterschiedliche
> Spannungsfeld hochautomatisiertes Fahren zwischen Euphorie und Ablehnung > Prof. Dr.-Ing. Karsten Lemmer >
 DLR.de Folie 1 Spannungsfeld hochautomatisiertes Fahren zwischen Euphorie und Ablehnung Prof. Dr.-Ing. Karsten Lemmer Deutsches Zentrum für Luft- und Raumfahrt e.v. Institut für Verkehrssystemtechnik DLR.de
DLR.de Folie 1 Spannungsfeld hochautomatisiertes Fahren zwischen Euphorie und Ablehnung Prof. Dr.-Ing. Karsten Lemmer Deutsches Zentrum für Luft- und Raumfahrt e.v. Institut für Verkehrssystemtechnik DLR.de
5G LAB GERMANY. 5G Lab. Intelligente Lösungen für effiziente Mobilität. Was kann die neueste Generation Mobilfunk für effiziente Mobilität leisten?
 Fachtagung "Intelligente Lösungen für effiziente Mobilität" Intelligente Lösungen für effiziente Mobilität 5G LAB GERMANY 5G Lab Was kann die neueste Generation Mobilfunk für effiziente Mobilität leisten?
Fachtagung "Intelligente Lösungen für effiziente Mobilität" Intelligente Lösungen für effiziente Mobilität 5G LAB GERMANY 5G Lab Was kann die neueste Generation Mobilfunk für effiziente Mobilität leisten?
Halbleiter als Basis für Innovationen im Automobil. Peter Schiefer Division President Automotive Infineon Technologies AG
 Halbleiter als Basis für Innovationen im Automobil Peter Schiefer Division President Automotive Infineon Technologies AG Halbleiter in einem Auto: über 100 Steuergeräte aus bis zu 6.000 Halbleitern (HL)
Halbleiter als Basis für Innovationen im Automobil Peter Schiefer Division President Automotive Infineon Technologies AG Halbleiter in einem Auto: über 100 Steuergeräte aus bis zu 6.000 Halbleitern (HL)
Einsatz von Aufgaben mit dynamischer Situationsdarstellung ab dem in der Theoretischen Fahrerlaubnisprüfung in Deutschland
 TÜV DEKRA arge tp 21 Arbeitsgemeinschaft Technische Prüfstellen für den Kraftfahrzeugverkehr 21 Wintergartenstraße 4, 01307 Dresden Tel. 0351 20789-0 Fax 0351 20789-20 E-Mail sekretariat@argetp21.de Web
TÜV DEKRA arge tp 21 Arbeitsgemeinschaft Technische Prüfstellen für den Kraftfahrzeugverkehr 21 Wintergartenstraße 4, 01307 Dresden Tel. 0351 20789-0 Fax 0351 20789-20 E-Mail sekretariat@argetp21.de Web
Fliegerarztlehrgang Kurs E / 11
 Fliegerarztlehrgang Kurs E / 11 01. November 2003 SFO Dipl. Ing. Markus Jäger Sicherheit ist subjektiv Akzeptanz von Risiken selbstbestimmt / fremdbestimmt Akzeptanz von Risiken selbstbestimmt Mount Everest
Fliegerarztlehrgang Kurs E / 11 01. November 2003 SFO Dipl. Ing. Markus Jäger Sicherheit ist subjektiv Akzeptanz von Risiken selbstbestimmt / fremdbestimmt Akzeptanz von Risiken selbstbestimmt Mount Everest
Engineering und Betrieb Smarter Komponenten in IoT-Netzwerken für die Automatisierung der Produktion
 Institut für Automatisierungstechnik und Softwaresysteme Engineering und Betrieb Smarter Komponenten in IoT-Netzwerken für die Automatisierung der Produktion Prof. Dr.-Ing. Michael Weyrich IOT-Kongress
Institut für Automatisierungstechnik und Softwaresysteme Engineering und Betrieb Smarter Komponenten in IoT-Netzwerken für die Automatisierung der Produktion Prof. Dr.-Ing. Michael Weyrich IOT-Kongress
Wandlungsfähigkeitstraining für. Mitarbeiter in der manuellen Montage. basierend auf Trainingsmethoden. aus dem Gerätturnen.
 Wandlungsfähigkeitstraining für Mitarbeiter in der manuellen Montage basierend auf Trainingsmethoden aus dem Gerätturnen Dissertation zur Erlangung des akademischen Grades Doktoringenieur (Dr.-Ing.) vorgelegt
Wandlungsfähigkeitstraining für Mitarbeiter in der manuellen Montage basierend auf Trainingsmethoden aus dem Gerätturnen Dissertation zur Erlangung des akademischen Grades Doktoringenieur (Dr.-Ing.) vorgelegt
Mensch vs. Maschine? Von selbstfahrenden Autos und digitalen Fabriken
 Bitte decken Sie die schraffierte Fläche mit einem Bild ab. Please cover the shaded area with a picture. (24,4 x 11,0 cm) Mensch vs. Maschine? Von selbstfahrenden Autos und digitalen Fabriken Wolfgang
Bitte decken Sie die schraffierte Fläche mit einem Bild ab. Please cover the shaded area with a picture. (24,4 x 11,0 cm) Mensch vs. Maschine? Von selbstfahrenden Autos und digitalen Fabriken Wolfgang
Entwicklung einer zeitbezogenen Navigation für den Straßenverkehr
 Entwicklung einer zeitbezogenen Navigation für den Straßenverkehr AGIP-Forschungsvorhaben F.A.-Nr. 24.8, Projektzeitraum 1.1.25 bis 31.12. 26 Ausgangssituation Stand der Technik im Straßenverkehr sind
Entwicklung einer zeitbezogenen Navigation für den Straßenverkehr AGIP-Forschungsvorhaben F.A.-Nr. 24.8, Projektzeitraum 1.1.25 bis 31.12. 26 Ausgangssituation Stand der Technik im Straßenverkehr sind
WENN AUTOS ALLEINE FAHREN... Ein kritischer Blick auf digitalisierte Mobilität und Fahrzeugtechnik
 WENN AUTOS ALLEINE FAHREN... Ein kritischer Blick auf digitalisierte Mobilität und Fahrzeugtechnik Carsten Weber Associated Partner MHP Management- und IT-Beratung GmbH l Ihr Rennteam. MHP Management-
WENN AUTOS ALLEINE FAHREN... Ein kritischer Blick auf digitalisierte Mobilität und Fahrzeugtechnik Carsten Weber Associated Partner MHP Management- und IT-Beratung GmbH l Ihr Rennteam. MHP Management-
AI in Computer Games. Übersicht. Motivation. Vorteile der Spielumgebung. Techniken. Anforderungen
 Übersicht AI in Computer Games Motivation Vorteile der Spielumgebung Techniken Anwendungen Zusammenfassung Motivation Vorteile der Spielumgebung Modellierung glaubwürdiger Agenten Implementierung menschlicher
Übersicht AI in Computer Games Motivation Vorteile der Spielumgebung Techniken Anwendungen Zusammenfassung Motivation Vorteile der Spielumgebung Modellierung glaubwürdiger Agenten Implementierung menschlicher
Smart Mobility Selbstfahrende Minibusse im Personennahverkehr
 DI Dr. Karl Rehrl und Univ.-Doz. Dr. Siegfried Reich Smart Mobility Selbstfahrende Minibusse im Personennahverkehr OCG Jahresopening, 24. Jänner 2017 Die Story: Last-Mile im öffentlichen Personennahverkehr!
DI Dr. Karl Rehrl und Univ.-Doz. Dr. Siegfried Reich Smart Mobility Selbstfahrende Minibusse im Personennahverkehr OCG Jahresopening, 24. Jänner 2017 Die Story: Last-Mile im öffentlichen Personennahverkehr!
Avancierte Technik in Beruf und Alltag die arbeitswissenschaftliche Perspektive
 Prof. Dr. Martin Fischer Institut für Berufspädagogik und Allgemeine Pädagogik Internet: http://www.ibp.kit.edu Avancierte Technik in Beruf und Alltag die arbeitswissenschaftliche Perspektive KIT die Kooperation
Prof. Dr. Martin Fischer Institut für Berufspädagogik und Allgemeine Pädagogik Internet: http://www.ibp.kit.edu Avancierte Technik in Beruf und Alltag die arbeitswissenschaftliche Perspektive KIT die Kooperation
When testing meets intelligence MECHATRONIK
 When testing meets intelligence MECHATRONIK Mechatronik Entwicklungs- und Testzentrum Integrierte Testumgebung für mechatronische Systeme und Strukturen. Mechatronik Durch die Kombination von Mechanik,
When testing meets intelligence MECHATRONIK Mechatronik Entwicklungs- und Testzentrum Integrierte Testumgebung für mechatronische Systeme und Strukturen. Mechatronik Durch die Kombination von Mechanik,
Fahrerassistenzsysteme bei der BMW Group
 Dr.-Ing. Carsten Haß Entwicklung Fahrdynamik Regelungstechnisches Kolloquium, Dortmund Seite 2 Übersicht 1. Einführung 2. ACC und ACC Stop&Go 3. Entwicklungsmethoden und Werkzeuge 4. Ausbildung und Praxis
Dr.-Ing. Carsten Haß Entwicklung Fahrdynamik Regelungstechnisches Kolloquium, Dortmund Seite 2 Übersicht 1. Einführung 2. ACC und ACC Stop&Go 3. Entwicklungsmethoden und Werkzeuge 4. Ausbildung und Praxis
Verkehrssicherheit und. Zukunft: OPERA-3
 Eidgenössisches Departement für Umwelt, Verkehr, Energie und Kommunikation UVEK Verkehrssicherheit und Fahrausbildung der Zukunft: OPERA-3 10 Jahre SFV-Jubiläum 3.11.2014 Rudolf Dieterle Übersicht 1. Das
Eidgenössisches Departement für Umwelt, Verkehr, Energie und Kommunikation UVEK Verkehrssicherheit und Fahrausbildung der Zukunft: OPERA-3 10 Jahre SFV-Jubiläum 3.11.2014 Rudolf Dieterle Übersicht 1. Das
Mensch-Maschine-Interaktion. Mensch-Maschine-Interaktion für intelligente technische Systeme Einführung
 Mensch-Maschine-Interaktion für intelligente technische Systeme Einführung Prof. Dr.-Ing. Stefan Kopp (Univ. Bielefeld, CITEC) Mensch-Maschine-Interaktion Mensch will Aufgabe erledigen und muss System
Mensch-Maschine-Interaktion für intelligente technische Systeme Einführung Prof. Dr.-Ing. Stefan Kopp (Univ. Bielefeld, CITEC) Mensch-Maschine-Interaktion Mensch will Aufgabe erledigen und muss System
Modellgestützte Online-Programmierverfahren für Industrieroboter
 Modellgestützte Online-Programmierverfahren für Industrieroboter 40. Sitzung des FA 4.13 Steuerung und Regelung von Robotern Universität Karlsruhe(TH) Institut für Prozessrechentechnik,Automation und Robotik
Modellgestützte Online-Programmierverfahren für Industrieroboter 40. Sitzung des FA 4.13 Steuerung und Regelung von Robotern Universität Karlsruhe(TH) Institut für Prozessrechentechnik,Automation und Robotik
Autonomes Fahren. Aktuelle Entwicklungen. 2. Niederösterreichischer Fahrlehrertag Manfred Haider AIT Austrian Institute of Technology GmbH
 Autonomes Fahren Aktuelle Entwicklungen 2. Niederösterreichischer Fahrlehrertag 29.11.2016 Manfred Haider AIT Austrian Institute of Technology GmbH Begriffe zum Automatisierten Fahren Fahrer zu jeder Zeit
Autonomes Fahren Aktuelle Entwicklungen 2. Niederösterreichischer Fahrlehrertag 29.11.2016 Manfred Haider AIT Austrian Institute of Technology GmbH Begriffe zum Automatisierten Fahren Fahrer zu jeder Zeit
DER AUTOBAHN-CHAUFFEUR
 Motivation: - Autobahn-Chauffeur als Beispiel für eine hochautomatisiertes Fahrfunktion (VDA Level 3) - Standardszenarien, kritische Szenarien und Automationsrisiken dienen als Basis zur Befüllung der
Motivation: - Autobahn-Chauffeur als Beispiel für eine hochautomatisiertes Fahrfunktion (VDA Level 3) - Standardszenarien, kritische Szenarien und Automationsrisiken dienen als Basis zur Befüllung der
Schrittweise vorgestellt
 3 MBSE Lehrstuhl für Raumfahrttechnik Schrittweise vorgestellt Was erwartet mich in diesem Kapitel? Erläuterung der MBSE-Methodologie anhand der durchgängigen Beispielmission MOVE Modellierung von Anwendungsfällen
3 MBSE Lehrstuhl für Raumfahrttechnik Schrittweise vorgestellt Was erwartet mich in diesem Kapitel? Erläuterung der MBSE-Methodologie anhand der durchgängigen Beispielmission MOVE Modellierung von Anwendungsfällen
Lernen bis ins hohe Alter - Feste Gewohnheit und Veränderbarkeit Prof. Dr. Bernhard Schlag DVR-Presseseminar Lebenslang für den Straßenverkehr lernen
 Lernen bis ins hohe Alter - Feste Gewohnheit und Veränderbarkeit Prof. Dr. Bernhard Schlag DVR-Presseseminar Lebenslang für den Straßenverkehr lernen 1 Der Bevölkerungsanteil der Älteren (und der ganz
Lernen bis ins hohe Alter - Feste Gewohnheit und Veränderbarkeit Prof. Dr. Bernhard Schlag DVR-Presseseminar Lebenslang für den Straßenverkehr lernen 1 Der Bevölkerungsanteil der Älteren (und der ganz
> GIS-Technologien für den automatisierten Verkehr > Andreas Richter agit 2017 >
 DLR.de Folie 1 > GIS-Technologien für den en Verkehr > Andreas Richter agit 2017 > 06.07.2017 GIS-Technologien für das Erstellen, Verwalten und Verteilen hochgenauer in Spezialformaten im Kontext des en
DLR.de Folie 1 > GIS-Technologien für den en Verkehr > Andreas Richter agit 2017 > 06.07.2017 GIS-Technologien für das Erstellen, Verwalten und Verteilen hochgenauer in Spezialformaten im Kontext des en
Was muss getan werden, um Industrial Internet umzusetzen?
 Was muss getan werden, um Industrial Internet umzusetzen? 7. PLM Future Tagung 2015 // World Café Tagungszentrum "Brauhaus an der Gartenschau", Kaiserslautern // 07. Oktober 2015 Technische Universität
Was muss getan werden, um Industrial Internet umzusetzen? 7. PLM Future Tagung 2015 // World Café Tagungszentrum "Brauhaus an der Gartenschau", Kaiserslautern // 07. Oktober 2015 Technische Universität
Platooning im Alltag Potentiale und Perspektiven Trucksymposium 2017, Nuerburg Ring. Schenker AG Dr. Ane-Kristin Reif-Mosel Essen
 Platooning im Alltag Potentiale und Perspektiven Trucksymposium 2017, Nuerburg Ring Schenker AG Dr. Ane-Kristin Reif-Mosel Essen 2017-06 DB Schenker Land Transport Luftfracht Seefracht Kontraktlogistik
Platooning im Alltag Potentiale und Perspektiven Trucksymposium 2017, Nuerburg Ring Schenker AG Dr. Ane-Kristin Reif-Mosel Essen 2017-06 DB Schenker Land Transport Luftfracht Seefracht Kontraktlogistik
Demenz und Autofahren. Herzlich willkommen! Deutsche Alzheimer Gesellschaft e.v. Selbsthilfe Demenz Landesverband Bayern
 Demenz und Autofahren Herzlich willkommen! Demenz und Digitalisierung Einsatzmöglichkeiten neuer Technologien im (Pflege-) Alltag Dr. Winfried Teschauer Gemeinsamer Fachtag 2018 Ingenium-Stiftung Alzheimer
Demenz und Autofahren Herzlich willkommen! Demenz und Digitalisierung Einsatzmöglichkeiten neuer Technologien im (Pflege-) Alltag Dr. Winfried Teschauer Gemeinsamer Fachtag 2018 Ingenium-Stiftung Alzheimer
Verbesserung der Energiebilanz durch Einsatz der virtuellen Realität Handlungsoptionen für die Kommunen
 Verbesserung der Energiebilanz durch Einsatz der virtuellen Realität Handlungsoptionen für die Kommunen Prof. Jivka Ovtcharova Institut für Informationsmanagement im Ingenieurwesen (IMI) EnBW - Regionalzentrum
Verbesserung der Energiebilanz durch Einsatz der virtuellen Realität Handlungsoptionen für die Kommunen Prof. Jivka Ovtcharova Institut für Informationsmanagement im Ingenieurwesen (IMI) EnBW - Regionalzentrum
Guerilla Marketing. Alternative Werbeformen als Techniken der Produktinszenierung. 4Q Springer Gabler. Kai Harald Krieger RESEARCH
 Kai Harald Krieger Guerilla Marketing Alternative Werbeformen als Techniken der Produktinszenierung Mit einem Geleitwort von Prof. Dr. Franz-Rudolf Esch 4Q Springer Gabler RESEARCH Inhaltsverzeichnis IX
Kai Harald Krieger Guerilla Marketing Alternative Werbeformen als Techniken der Produktinszenierung Mit einem Geleitwort von Prof. Dr. Franz-Rudolf Esch 4Q Springer Gabler RESEARCH Inhaltsverzeichnis IX
Autonomes Fahren: Die Mehrheit vertraut dem Autopiloten
 Autonomes Fahren: Die Mehrheit vertraut dem Autopiloten 22.05.2017 Köln Automatisiertes Fahren soll schon bald unter bestimmten Voraussetzungen auf deutschen Straßen Realität werden. Bundestag und Bundesrat
Autonomes Fahren: Die Mehrheit vertraut dem Autopiloten 22.05.2017 Köln Automatisiertes Fahren soll schon bald unter bestimmten Voraussetzungen auf deutschen Straßen Realität werden. Bundestag und Bundesrat