Kurs "Mikrocontroller Hard- und Software
|
|
|
- Timo Bieber
- vor 8 Jahren
- Abrufe
Transkript
1 Kurs "Mikrocontroller Hard- und Software Gerhard Schmidt Kastanienallee Darmstadt

2 Hardware Hardware-Aufbau Controller Experimentierboard I/O-Ports Timing Hardwaretimer AD-Wandler Interruptsteuerung Fuses Gliederung Software (Assembler) Studio-Programmierung en Flash-Programmierung Port-Programmierung Schleifenprogramme Timerprogrammierung ADC-Programme Interruptprogramme Fuse-Einstellung

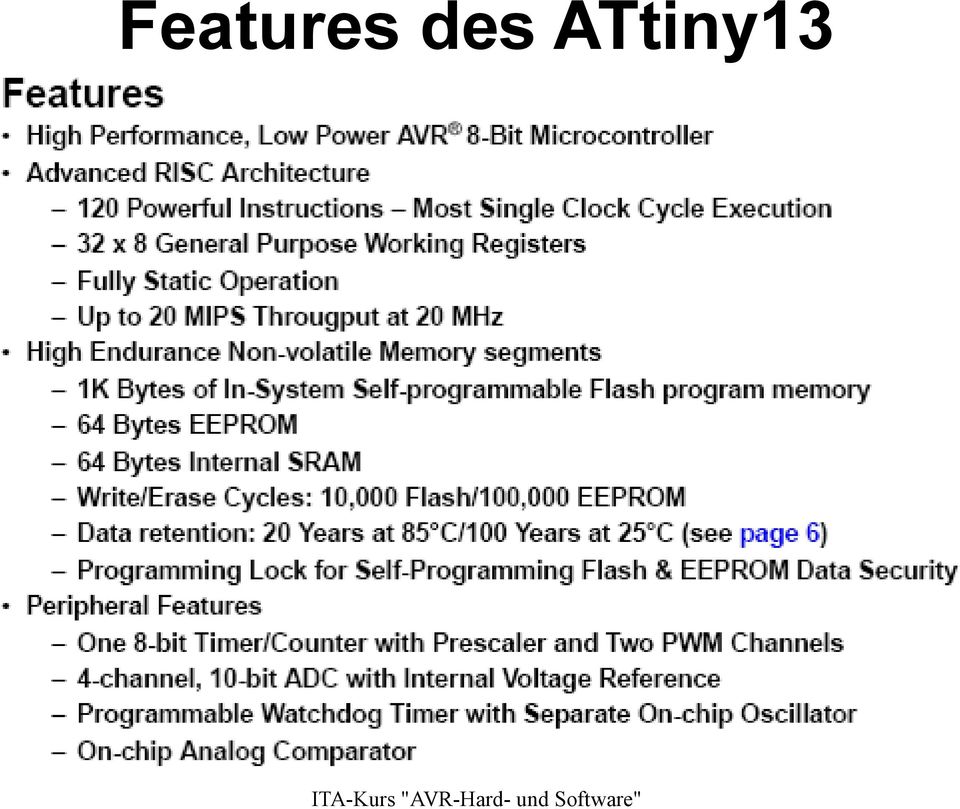
3 Features des ATtiny13
4 Interner Aufbau des ATtiny13 Externe Anschlüsse Programmspeicher (Flash-RAM) Datenspeicher (SRAM) I/O-Interface, Interne Geräte Kontrollbus Datenbus 8-Bit Adressbus 16-Bit Ablaufsteuerung CPU Externe Taktquellen Reset Takterzeugung Interruptsteuerung Stromversorgung

5 Externe Anschlüsse VCC: +1,8..5,5 V Versorgungsspannung; GND: 0 V RESET bzw. PB5: Neustart des Prozessors CLKI, MOSI, MISO: Programmier-Interface für In-System-Programmierung (ISP) PB0 bis PB4: Ein- oder Ausgabe-Pins

6 Tn13-Experimentierboard ATtiny13 mit ISP10-Schnittstelle und 5V-Stromversorgung Ausführliche Beschreibung in der Datei tn13exp-beschreibung.pdf +5V VCC PB2 PB1 PB0 1 0 k ATtiny13 RES 1 PB3 PB4 GND

7 390Ω Aufgabe 1: Eine LED einschalten Variante a) Variante b) 390Ω +5V VCC PB2 PB1 PB0 VCC PB2 PB1 PB0 1 0 k ATtiny k ATtiny13 RES 1 PB3 PB4 GND RES 1 PB3 PB4 GND 0V

8 I/O-Port im AVR: Innenaufbau & E +Ub Pull-Up- Widerstand 50 k I/O-Pin PB0 Pin 5 Output-Port PORTB Direction-Port DDRB Input-Port PINB Portbit 0 löschen: cbi PORTB,PB0 Portbit 0 setzen: sbi PORTB,PB0 Port 0 Eingang: cbi DDRB,PB0 Port 0 Ausgang: sbi DDRB,PB0 Alle Portbits lesen: in R16,PINB Bei Portbit 0 verzweigen: sbic PINB,PB0 sbis PINB,PB0

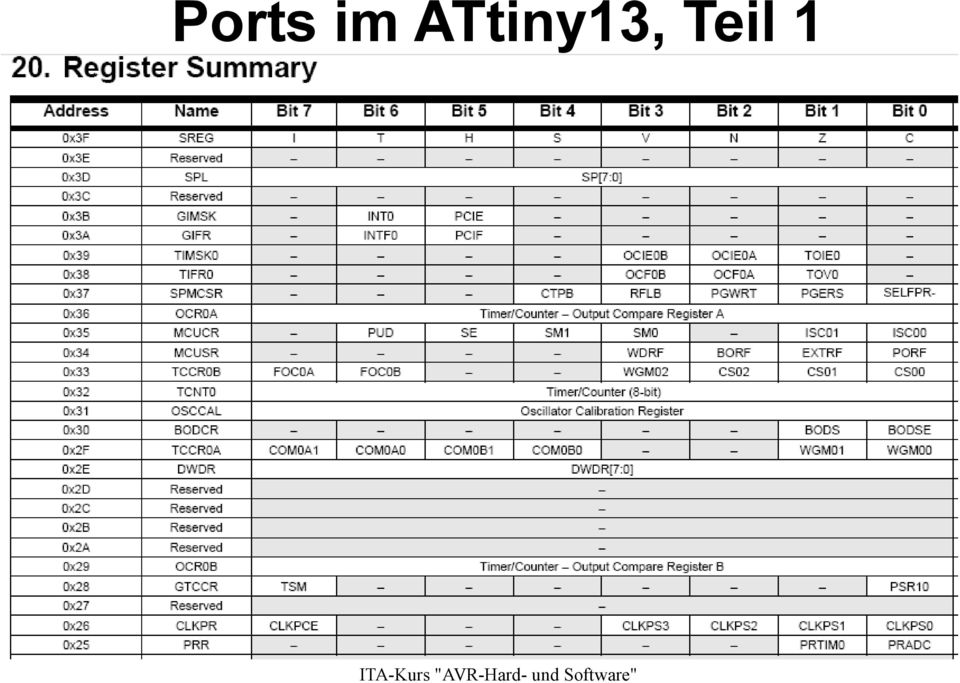
9 Ports im ATtiny13, Teil 1
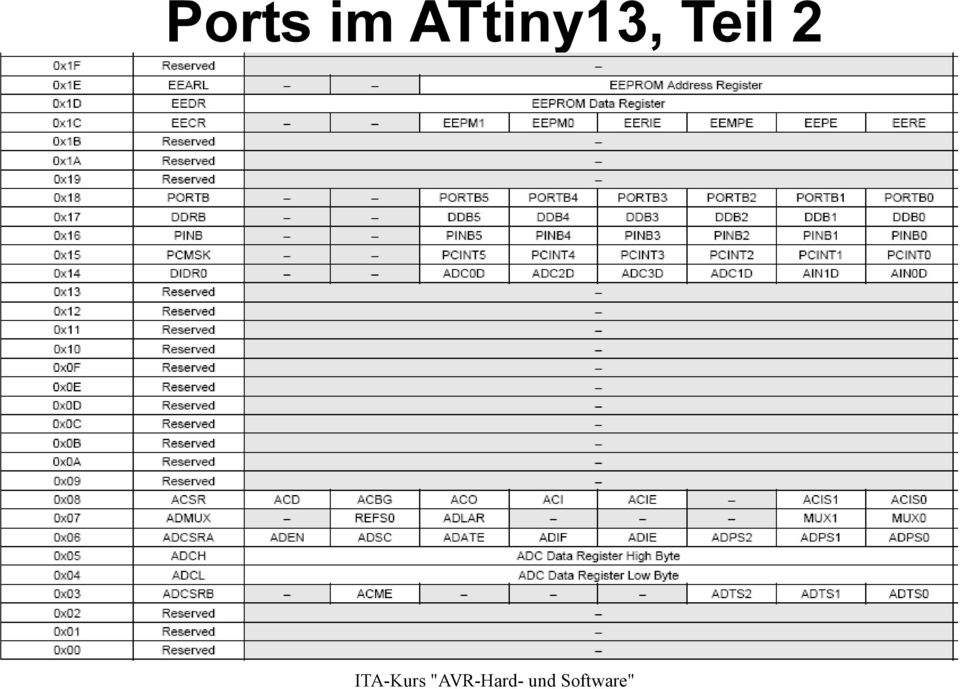
10 Ports im ATtiny13, Teil 2
11 Das Programm schreiben 1) Starten der Studio-Software 2) Neues Projekt anlegen 3) Assembler-Programm in Editor eintippen 4) Quellcode assemblieren (Bild 4) 5) mit AVRISPmkII-Programmiergerät in den Tiny13 programmieren Siehe avrisp_mk_ii_beschreibung.pdf

12 Der Programmaufbau ; ; Test schaltet Lampe ; an PB0 ein ;.nolist.include "tn13def.inc".list sbi DDRB,PB0 cbi PORTB,PB0 loop: rjmp loop Kommentar, beginnt mit ";" "." sind Assemblerdirektiven:.NOLIST schaltet Listing aus.include liest Datei mit Typspezifischen Definitionen ein.list schaltet Listing wieder an Assemblerinstruktionen SBI: Set Bit in I/O-Port CBI: Clear Bit in I/O-Port DDRB,PORTB: Ports PB0: Portbit "loop: rjmp loop": Unendliche Schleife loop: Sprungziel, Label RJMP: Relativer Sprung (Jump)

13 Include Header-Datei "tn13def.inc" Ort: C:\Program Files\Atmel\AVR Tools\AvrAssembler2\Appnotes

14 Das Listing des Programms Im Studio Project/Assembler Options öffnen: Button Create List File einschalten, mit OK schließen

15 Das Listing des Programms Im Project -Fenster die Datei Output/test_pb0.lst auswählen Rot: Adresse der ; Grün: Opcode der ; Blau: Quellcode-Zeile der

16 Simulation des Programms Mit Build/Build and Run den Simulator starten, mit View- Toolsbars-I/O den Ein- und Ausgabebereich sichtbar machen, darin den PORTB auswählen

17 Simulation des Programms Mit Debug/StepInto oder F11 einen Einzelschritt ausführen Die Änderungen durch die gerade ausgeführte werden sichtbar!

18 Aufgabe 2: Ein- und Ausschalten der LED Aufgabe: Schreibe test_pb0.asm so um, dass die LED dauerhaft wechselnd ein- und ausgeschaltet wird. Ermittle für alle verwendeten en die Ausführungszeiten bei einer Taktfrequenz von 1,2 MHz (Hinweis: Spalte "#Clocks" in der stabelle). Mit welcher Frequenz und Pulsweite leuchtet die LED?
.")
19 Aufgabe 3: Einschalten der LED nur bei gedrücktem Taster Aufgabe: Schreibe test_pb0.asm so um, dass die LED bei gedrücktem Taster an PB4 (Pin 3) eingeschaltet wird. Simuliere das Programm im Studio- Simulator. +5V VCC 390Ω PB2 PB1 PB0 Hinweise: Einlesen des Bits an PB4 und verzweigen mit den en SBIC PINB,PB4 oder SBIS PINB,PB4 1 0 k RES 1 ATtiny13 PB3 PB4 GND SBIC = Skip if Bit in I/o register is Cleared, überspringt nächste, falls Portbit Null ist 0V SBIS = dto., falls Portbit Eins ist Taster

20 Register im AVR 32 Byte 8-Bit-Lese-/Schreib-Speicher Schnellzugriff durch CPU, aufgrund der Vielzahl auch für oft gebrauchte Variablen nutzbar Benennung in Assembler: R0 bis R31 Setzen eines Registers auf einen Wert: LDI R16,128 ; setzt Register R16 auf dezimal 128 LDI R16,0x80 ; setzt Register R16 auf hex 80 geht aber nur mit den Registern R16 bis R31! Direkt adressierbar von der CPU: Beispiel einer 8-Bit-Addition: : ADD R0,R1 ; addiere Register R1 zu R0 und speichere Resultat in R0

21 Eine Verzögerungsschleife ; 8-Bit ; Verzögerung ldi R16,200 noch_mal: dec R16 brne noch_mal Kommentare Lade Dezimalzahl 200 in das Register R16 = Anzahl Wiederholungen der Schleife Label (Marke) zur Wiederholung der Schleife Dekrementiere das Register R16 = zieht eine Eins ab, setzt das Z-Flag im Statusregister der CPU, wenn Registerinhalt = Null "Branch Relative if Not Equal" = Verzweige zum Label, wenn nicht gleich Null, fragt Z- Flag im Statusregister ab
22 Verzögerungszeit der Schleife ; 8-Bit ; Verzögerung ldi R16,200 ; 1 Takt noch_mal: dec R16 ; 1 Takt brne noch_mal ; brne: 1 Takt bei Durch- ; lauf, 2 Takte bei Ver- ; zweigung 199 Durchläufe der Schleife mit Verzweigung plus 1 Durchlauf der Schleife ohne Verzweigung n(takte) = 199 * (1+2) + 1 * (1+1) = = 599 Verzögerungszeit bei 1,2 MHz Takt: t(zeit) = 599 / 1,2 [µs] = 499 [µs] Frequenz bei zwei Schleifen: f (Ton) = 1 / (2 * t) = 1002 Hz Allgemein (c = Konstante): n(takte) = 3*(c-1)+ 2 = 3 * c - 1 t(zeit) = (3 * c - 1) / 1,2 [µs] f(ton) = / (3 * c 1) [Hz] c = ( / f(ton) 1) / 3
23 Aufgabe 4: Tonerzeugung mit Schleifen Erzeuge mit zwei 8-Bit- Verzögerungsschleifen und einem Lautsprecher an PB3 einen Ton von 1760 Hz, wenn die Taste gedrückt wird. +5V VCC PB2 PB1 PB0 Simuliere das Programm Stelle mit "Debug-Simulator Options" die Simulatorfrequenz auf 1,2 MHz um (Texteingabe "1.2" in die Zeile). Setze Breakpoints auf die Ein- und Ausschalteinstruktionen: Cursor in die Zeile setzen, rechte Maustaste, "Toggle Breakpoint", rote Markierung erscheint Zähle die Takte mit "View-Toolbars-Processor", dort mit der "Stopwatch", mit der rechten Maustaste kann diese auf Null gesetzt werden. Mit "Debug Run" oder F5 läuft der Simulator von Breakpoint bis Breakpoint. 1 0 k ATtiny13 RES PB3 PB4 1 Taster Lautsprecher GND 0V
24 Doppelregister (16-Bit) Doppelregister sind zwei benachbarte Register, für die 16-Bit-en möglich sind die sich als 16-Bit- Adresszähler (Pointer) eignen Register: R27:R26 = X; XH:XL R29:R28 = Y; YH:YL R31:R30 = Z; ZH:ZL en: Laden:.equ c = ldi XH,HIGH(c) ldi XL,LOW(c) Um Eins erhöhen: adiw XL,1 Um Eins erniedrigen: sbiw XL,1 Register in Speicherzelle schreiben/lesen: st X,R0 bzw. ld R0,X
25 16-Bit-Schleifen ; 16-Bit ; Verzögerung.equ zahl = ldi YH,HIGH(zahl) ldi YL,LOW(zahl) noch_mal: sbiw YL,1 ; 2 Takte brne noch_mal ; 1 Takt bei Durchlauf, ; 2 Takte bei Verzweigung Durchläufe der Schleife mit Verzweigung plus 1 Durchlauf der Schleife ohne Verzweigung n(takte) = * (2+2) + 1 * (2+1) = = Verzögerungszeit bei 1,2 MHz Takt: t(zeit) = / 1,2 [µs] = [µs] Blinkfrequenz bei zwei Schleifen: f (Blink) = 1 / (2 * t) = 2,5 Hz Allgemein (c = Konstante): n(takte) = 4 * (c-1) + 3 = 4 * c - 1 t(zeit) = (4 * c - 1) / 1,2 [µs] f(blink) = / (4 * c 1) [Hz] c = ( / f(blink) 1) / 4
26 Aufgabe 5: 4 Hz-LED mit 16-Bit- Schleife Aufgabe: Schreibe ein Programm mit 16-Bit- Schleifen, das die LED bei gedrücktem Taster an PB4 (Pin 3) mit 1 Hz aus- und einschaltet. +5V 390Ω Hinweise: VCC PB2 PB1 PB0 Einlesen des Bits an PB4 und verzweigen mit den en SBIC PINB,PB4 oder SBIS PINB,PB4 1 0 k ATtiny13 SBIC = Skip if Bit in I/o register is Cleared, überspringt nächste, falls Portbit Null ist RES 1 PB3 PB4 GND SBIS = dto., falls Portbit Eins ist 0V Da bei 1 Hz die Konstante über liegt (größte 16-Bit-Zahl), müssen drei Zählschleifen kombiniert werden! Taster
27 Timer/Counter Für Zähl- und Timing-Aufgaben haben alle AVR Zähler-/Timer-Bausteine (T/C) an Bord. Kleine AVR haben mindestens einen 8-Bit-T/C, größere AVR weitere 8- und 16-Bit-T/C. Ein T/C besteht aus: einem wählbaren Vorteiler für den Systemtakt (Prescaler), einem 8- oder 16-Bit breiten Zählregister, zwei entsprechend breiten Vergleichsregistern (Compare A und Compare B).
28 CPU- Clock T0 PB2 Pin 7 7 Programmieren des Vorteilers ; Timer starten, Vorteiler = 1024 ldi R16,(1<<CS2) (1<<CS0) out TCCR0B,R16 ; Timer stoppen clr R16 out TCCR0B,R ControlB TCCR0B Divider Multiplexer 7 O C B A CS 02 1 CS 01 T/C-Vorteiler 0 CS 00 Zum Zähleingang Der Vorteiler wird durch das Kontrollwort TCCR0B gesteuert. Die drei CS-Bits kontrollieren, von welcher Quelle das Zählsignal abgeleitet wird Zähler/Timer-Steuerung Zähler/Timersignal ausgeschaltet Timer, zählt CPU-Takt Timer, zählt CPU-Takt / Timer, zählt CPU-Takt / Timer, zählt CPU-Takt / Timer, zählt CPU-Takt / Counter, zählt ansteigende Pulse an PB Counter, zählt abfallende Pulse an PB2
29 vom Prescaler Output-Compare Register A OCR0A Bit-Compare = 8 8-Bit-Counter Counter und Compare RESET 0 Counter TCNT Der Counter zählt die vom Vorteiler kommenden Impulse. Er zählt aufwärts. Sein Zählerstand ist durch Lesen des Ports TCNT0 zugänglich. Der Zählerstand wird laufend mit dem Inhalt des Compare-Registers OCR0A (und OCR0B) verglichen. Bei Gleichheit können weitere Aktionen ausgelöst werden. Programmieren des Counters Programmieren des Compare Registers Lesen des Counters in R16,TCNT0 Schreiben des Counters ldi R16,100 out TCNT0,R16 Schreiben des Compare-Registers A ldi R16,128 out OCR0A,R16
30 Timer-Modi Acht verschiedene Arten, den Timer zu betreiben. Auswahl über das Setzen der WGM-Bits in den Kontrollregistern TCCR0A (WGM00 und WGM01) und TCCR0B (WGM02) WGM Modus Top Update Int # OCRx TOV Normal (Timing, Zählen) 0xFF Sofort 0xFF Phasenkorrekter PWM, 8 Bit 0xFF TOP 0x CTC (Clear Timer on Compare) OCRA Sofort 0xFF Schnelle PWM, 8 Bit 0xFF TOP 0xFF Phasenkorrekter PWM, <8 Bit OCRA TOP 0x Schnelle PWM, <8 bit OCRA TOP TOP
31 Clear Timer on Compare (CTC) CTC-Modus: Bei Erreichen des Comparewertes im Compare-Register A wird der Zähler wieder auf Null gesetzt. Ermöglicht in weiten Bereichen einstellbare Teilerraten. Beispiel: Taktfrequenz: 1,2 MHz, Vorteiler: 1064, Cmp A = 255 1,2 MHz / 1064 / 255 = 4,42 Hz Taktfrequenz: 9,6 MHz, Vorteiler: 1, CmpA = 2 9,6 MHz / 1 / 2 = 4,8 MHz
32 Timer-Signale und Ports vom Vorteiler 7 8 Output-Compare Register A OCR0A Bit-Counter 2 8-Bit-Compare = Bit-Compare = Compare Match A RESET OCR0B Output-Compare Register B Compare Match B 0 COM0A1 COM0A0 Port B, OC0A=PB0 0 0 Normaler Portbetrieb, nicht verbunden 0 1 Toggle bei Compare-Match A 1 0 Nullsetzen bei Compare-Match A 1 1 Setzen bei Compare-Match A In FF Out OC0A Port B In FF Out OC0B COM0B1 COM0B0 Port B, OC0B=PB1 0 0 Normaler Portbetrieb, nicht verbunden 0 1 Toggle bei Compare-Match B 1 0 Nullsetzen bei Compare-Match B 1 1 Setzen bei Compare-Match B Der Timer kann selbstständig Ausgangspins am Port B steuern, z.b. Toggle ( ) Programmierung CTC+Toggle OC0A: ldi R16,(1<<COM0A0) (1<<WGM01) out TCCR0A,R16
33 Aufgabe 6: Sirene an PB0 Schreibe ein Programm, das an PB0 den Kammerton a' ausgibt (880 Hz), wenn der Taster gedrückt ist, sonst Kammerton a (440 Hz). Verwende den Timer im CTC-Modus mit variabler Frequenz mit OC0A zur Ausgabe. Hinweise: Vergiss nicht den Ausgangstreiber von PB0 einzuschalten! Beim Programmieren muss der Lautsprecher abgestöpselt werden! (Warum?) Wähle den Wert für den Vorteiler so klein wie möglich (Warum?). +5V 1 0 k VCC RES 1 PB2 PB1 PB0 ATtiny13 PB3 PB4 GND Taster 0V Lautsprecher
34 Interne Speicher : SRAM SRAM: Tiny13 verfügt über 64 Bytes SRAM SRAM ist flüchtig, bei Spannungsverlust unter die Untergrenze der Betriebsspannung gehen die gespeicherten Daten verloren. Verwendung von SRAM: Ablegen von Daten, für die die Register nicht ausreichen, en: "sts adresse,register" ; speichert Registerinhalt im SRAM. "lds register,adresse" ; liest SRAM-Datum in Register Anlegen von Datenpuffern, Manipulation mit Zeigern: "st [X Y Z],register" ; schreibt ins SRAM, Zeiger X, Y, Z gibt Adresse an "ld register,[x Y Z]" ; liest aus SRAM, Zeiger X, Y, Z gibt Adresse an statt "[X Y Z]" auch "[X+ Y+ Z+]" mit nachfolgendem Auto-Inkrement oder [-X - Y -Z] mit vorausgehendem Auto-Dekrement mit Y und Z auch: "std Y+d,register" oder "ldd register,y+d", mit d = (d = Displacement)
35 Interne Speicher : SRAM Verwendung von SRAM: Ablegen von Daten, für die die Register nicht ausreichen: "sts adresse,register" ; speichert Registerinhalt im SRAM. "lds register,adresse" ; liest SRAM-Datum in Register Anlegen von Datenpuffern, Manipulation mit Zeigern: "st [X Y Z],register" ; schreibt ins SRAM, Zeiger X, Y, Z gibt Adresse an "ld register,[x Y Z]" ; liest aus SRAM, Zeiger X, Y, Z gibt Adresse an statt "[X Y Z]" auch "[X+ Y+ Z+]" mit nachfolgendem Auto-Inkrement oder [-X - Y -Z] mit vorausgehendem Auto-Dekrement mit Y und Z auch: "std Y+d,register" oder "ldd register,y+d", mit d = (d = Displacement)
36 Register R0.. R31 $00.. $1F Interne Speicher : SRAM Portregister $00.. $3F * Bei sehr großen AVR beginnt SRAMSTART bei $0100! RAMEND: ATtiny13: $009F Einblendung Einblendung $ $001F $ $005F* $0060* RAMEND SRAM
37 Interne Speicher : SRAM-Stapel Verwendung von SRAM: Einrichten eines LIFO-Stapels: ldi R16,LOW(RAMEND) ; lower Byte des SRAM-Endes out SPL,R16 ; in lower Byte des Stapelzeigers Bei >256 Byte SRAM: High-Byte des SRAM-Endes in SPH Ablegen von zeitweise nicht benötigten Registern: push register ; Ablegen eines Registers auf dem Stapel pop register ; Holen des Registerinhalts vom Stapel Unterprogramme: Ablegen der Rücksprungadresse auf dem Stapel: rcall label ; legt Adresse+1 auf den Stapel und verzweigt nach label ret ; Rückkehr nach Adresse+1, holt Adresse vom Stapel Interrupts: Ablegen der Rücksprungadresse auf dem Stapel: Unterbrechung legt Rücksprungadresse auf Stapel und verzweigt an fest eingestellte Interrupt-Adresse (Interrupt-Vektor) reti ; beendet die Unterbrechung und kehrt zu vorheriger Adresse zurück
38 Interne Speicher: EEPROM EEPROM: Nichtflüchtiges Speichern von Daten, bleiben auch bei Abschalten erhalten Bei Tiny13: 64 Bytes EEPROM verfügbar, 0x00..0x3F Lesen: ldi R16,0x10 ; Adresse der EEPROM-Zelle in Register out EEARL,R16 ; in EEPROM-Adressregister schreiben sbi EECR,EERE ; setze Read Enable Bit in R16,EEDR ; Lese Inhalt der Zelle in das Register Schreiben: Warte: sbic EECR,EEPE ; frage Control Register ab ob Schreiben möglich rjmp Warte ; Schreiben noch nicht möglich, warte ldi R16,(0<<EEPM1) (0<<EEPM0) ; Setze Schreibmodus = 00 out EECR,R16 ; in Kontrollregister
39 Interne Speicher: EEPROM Schreiben (Fortsetzung): ldi R16,0x10 ; Adresse der EEPROM-Zelle in Register out EEARL,R16 ; in EEPROM-Adressregister schreiben ldi R16,0x01 ; Zu schreibendes Datum in Register schreiben out EEDR,R16 ; in Datenregister sbi EECR,EEMPE ; setze Enable Bit sbi EECR,EEPE ; setze programming Enable Schreiben benötigt 3,4 ms Für sequentielles Schreiben in mehrere Speicherzellen: EEPROM kann Interrupt auslösen, wenn Schreiben einer Zelle beendet.
40 Aufgabe 7: Einschaltzähler Programmiere einen Zähler im EEPROM, der bei jedem Einschalten (Reset-Taster) um eins erhöht wird. Der Zählerstand soll auf Null gesetzt werden, wenn beim Einschalten die Taste an PB4 gedrückt ist. +5V VCC 390Ω PB2 PB1 PB0 Der Zählerstand ist durch n-maliges Blinken der LED an PB0 auszugeben (0,1 Sekunden an und 0,2 Sekunden aus). Hinweise: Zur Vermeidung von Prellen des Reset-Tasters ist zu Beginn eine 20 ms lange Pause einzulegen. Verwende für die Verzögerungsschleifen Unterprogramme. Bitte Deinen Nachbarn um einen zweiten Taster. 1 0 k ATtiny13 RES PB3 PB4 1 Null-Taster Reset-Taster GND 0V
41 10-Bit-AD-Wandler (ADC) Ein ADC wandelt eine Analogspannung in eine 10 Bit breite Zahl um. Das Ergebnis steht in den Ports ADCH:ADCL. Der Kanal (Portpin) wird in ADMUX vorgewählt. Lesen des Ergebnisses: zuerst ADCL, danach ADCH! Ist das Bit ADLAR in ADMUX gesetzt, steht das Ergebnis linksbündig in den beiden Registern. Zum Lesen der oberen acht Bit reicht das Lesen von ADCH aus. Die Wandlung erfolgt aus einem Takt, der aus dem CPU- Takt durch Teilung abgeleitet ist (Bits ADPS2, ADPS1 und ADPS0 in ADCSRA). Jede Wandlung erfordert 25 (AD-Wandler war vorher abgeschaltet) bzw. 13 ADC-Takte. Der Vergleich erfolgt entweder mit der Betriebsspannung oder der eingebauten 1,1 V Spannungsreferenz.
42 CPU- Clock ADC Enable Start Conversion AD EN AD SC AD IF AD IE Int ADC: Interner Aufbau... AD P S2 AD P S1 Divider Multiplexer O AD P S Control A - ADCSRA AD SC MSB Result - ADCH Bit-ADC Start IntEn AD IE MSB LSB 2(8) AD IF In Ref IntFlag 8(2) LSB Result - ADCL Analog- Voltage Refselect Out AD Cn... AD C0 Analog-MUX (2) 1 0 M U X 2 AD C1 M U X Multiplexer - ADMUX M U X 0
43 Ansteuern des ADC AD-Kanal auswählen: ldi R16,(1<<ADLAR) (1<<MUX1) (1<<MUX0) out ADMUX,R16 ; links adjust, AD-Kanal PB3 ADC starten und Taktrate wählen: ldi R16,(1<<ADEN) (1<<ADSC) (1<<ADPS2) (1<<ADPS1) (1<<ADPS0) out ADCSRA,R16 Warten bis Wandler fertig ist: Warte: sbic ADCSRA,ADSC ; warte bis ADC fertig rjmp Warte ; noch nicht fertig Ergebnis des Wandlers auslesen: in R16,ADCH ; lese obere 8 Bit Ergebnis
44 Aufgabe 8: LED-Dimmer Schreibe ein Programm, das den mit dem Poti an PB3 eingestellten Spannungswert misst und in ein pulsweiten-moduliertes Signal (PWM) an OC0A umsetzt und damit eine LED verschieden hell leuchten lässt. +5V 390Ω Hinweise: Beachte, dass die LED bei längeren Null- Phasen heller leuchtet. Timer als PWM: Verwende den Fast- PWM-Modus des Timers und eine möglichst hohe PWM-Frequenz. ADC: Verwende den ADLAR-Modus des ADC (8-Bit) und die niedrigst-mögliche Abtastrate des ADC. Da die PWM nur An (+5 V) und Aus (0 V) verwendet, ist die Durchlassspannung der LED (ca. 1,9 V) bei dieser Anwendung ohne Bedeutung! 1 0 k VCC RES 1 PB2 PB1 ATtiny13 PB3 PB4 47k PB0 GND 0V
45 Interrupts Interrupts sind asynchrone Unterbrechungen des normalen Programmablaufs. Sie signalisieren den Bedienbedarfs eines Geräts. Im auslösenden Gerät muss vorher der Interrupt ermöglicht werden (Interrupt-Enable-Bit, IE). Das I-Bit im Statusregister muss gesetzt sein ( SEI), damit die CPU Interrupts akzeptiert. Tritt der Interrupt ein, wird der aktuelle Programmzähler auf den Stapel gelegt und an eine gerätespezifische Adresse (Interrupt-Vektor) verzweigt. Dort muss zu einer Interrupt-Service-Routine (ISR) gesprungen werden. Ist der Interrupt bearbeitet, muss mit RETI wieder an den unterbrochenen Programmablauf zurückgekehrt werden. Während der ISR sind weitere Interrupts blockiert. ISRs müssen daher kurz sein. Mit RETI werden Interrupts wieder zugelassen. Treten zwei Interrupts gleichzeitig auf, wird der höherwertige Interrupt zuerst bearbeitet. Je niedriger die Vektoradresse, desto höher die Priorität.
46 Interrupt-Ablauf ; Programmablauf Unterbrechung Programmzähler auf Stapel Rückkehr Programmzähler vom Stapel Unterbrechung Rückkehr ; Interrupt-Service-Routine 1... reti ; Ende ISR 1 ; Interrupt-Service-Routine 2... reti ; Ende ISR 2
47 Interruptvektoren im Tiny13
48 Interrupts, Beispiel ; Timer-Interrupt mit Blinker ; Blinkt drei Sekunden ;.nolist.include "tn13def.inc".list ; ; Register.def rsreg = R15 ; Sichern des SREG.def rmp = R16 ; Multipurpose.def rimp = R17 ; innerhalb ints.def cnt = R18 ; Zähler für Ints.def inv = R19 ; Invertiermaske LED ; ; Reset- und Interruptvektoren rjmp Init ; Reset-Vektor reti ; INT0-Vektor, nicht benutzt reti ; PCINT0-Vektor, nicht benutzt rjmp TimerIsr ; Timer-Overflow reti ; EERDY-Vektor, nicht benutzt reti ; ANACOMP-Vektor, nicht benutzt reti ; TIM0COMPA-Vektor, nicht benutzt reti ; TIM0COMPB-Vektor, nicht benutzt reti ; WDT-Vektor, nicht benutzt reti ; ADC-Vektor, nicht benutzt ; Init: ldi rmp,low(ramend) ; Stapel init out SPL,rmp ; Stapel setzen ldi cnt,10 ; Zähler setzen ldi inv,0x01 ; PB0 invertieren sbi DDRB,PB0 ; LED-Ausgang ldi rmp,1<<toie0 ; Enable Overfl Ints out TIMSK0,rmp ldi rmp,(1<<cs02) (1<<CS00) ; 1024 out TCCR0B,rmp ; Vorteiler sei ; enable ints loop: rjmp loop ; TimerIsr: ; Timer-Interrupts in rsreg,sreg ; sichere Status dec cnt ; Zähler vermindern brne TimerIsrRet ; nicht Null ldi cnt,10 ; Zähler neu starten in rimp,portb ; lese Port eor rimp,inv ; LED invertieren out PORTB,rimp ; und in Port zurück TimerIsrRet: out SREG,rsreg ; Herstellen Status reti ; Rückkehr ;
49 Aufgabe 9: Taster mit Interrupt Schreibe ein Programm, das interruptgesteuert bei gedrückter Taste die LED timer-gesteuert drei Mal kurz leuchten lässt. Hinweise: Verwende den PCINT0- Vektor zum Erkennen der Tasteränderungen. Verwende den TIM0- Overflow-Vektor zum Blinken. +5V 1 0 k VCC RES 1 390Ω PB2 PB1 ATtiny13 PB3 PB4 PB0 GND 0V Taster
50 Fuse-Programmierung Fuses sind Speicherzellen, die beim Programmieren gesetzt werden können und die das Hardware-Verhalten des Prozessors beeinflussen, z. B. welche Taktquelle verwendet wird (interner RC-Oszillator, externer Oszillator, externer Quarz. Achtung! Ohne angeschlossenen externen Oszillator oder Quarz lassen sich dann keine weiteren Programmierversuche mehr durchführen!), ob ein interner Teiler für den Systemtakt (CKDIV8) ein- oder ausgeschaltet ist (Ausschalten macht Prozessor acht Mal schneller, steigert aber überproportional den Stromverbrauch!), ob der RESET-Pin aktiv sein soll oder stattdessen ein Porteingang sein soll (Achtung! AVR ist danach nur noch mit Hochvolt-Programmierung zugänglich! Erfordert +12 V am RESET-Eingang! Nur hochwertige Programmiergeräte beherrschen dies (STK500, AVR-Dragon, etc.)), ob das Lesen und Verifizieren (Kopierschutz) oder das Überschreiben des programmierten Speichers (Schreibschutz) noch möglich sein soll (Lock- Bits) oder unter Löschen des Speicherinhalts nur noch per "ERASE DEVICE" ansprechbar sein soll.
51 Das Fuse-Fenster beim Tiny13
52 Die Clock-Fuses beim Tiny13
53 Umstellen des Tiny13 auf 4,8 MHz
54 Ausschalten von CKDIV8
55 Die Lock-Bits des Tiny13
Lösungen zum Kurs "Mikrocontroller Hard- und Software
 Lösungen zum Kurs "Mikrocontroller Hard- und Software Gerhard Schmidt Kastanienallee 20 64289 Darmstadt http://www.avr-asm-tutorial.net Lösung Aufgabe 2 Aufgabe 2 sbi DDRB,PB0 2 Takte sbi PORTB,PB0 2 Takte
Lösungen zum Kurs "Mikrocontroller Hard- und Software Gerhard Schmidt Kastanienallee 20 64289 Darmstadt http://www.avr-asm-tutorial.net Lösung Aufgabe 2 Aufgabe 2 sbi DDRB,PB0 2 Takte sbi PORTB,PB0 2 Takte
Programmierung von ATMEL AVR Mikroprozessoren am Beispiel des ATtiny13. Teil IV: Programmieren an Beispielen
 Programmierung von ATMEL AVR Mikroprozessoren am Beispiel des ATtiny13 Eine Einführung in Aufbau, Funktionsweise, Programmierung und Nutzen von Mikroprozessoren Teil IV: Programmieren an Beispielen Die
Programmierung von ATMEL AVR Mikroprozessoren am Beispiel des ATtiny13 Eine Einführung in Aufbau, Funktionsweise, Programmierung und Nutzen von Mikroprozessoren Teil IV: Programmieren an Beispielen Die
Microcontroller Kurs. 08.07.11 Microcontroller Kurs/Johannes Fuchs 1
 Microcontroller Kurs 08.07.11 Microcontroller Kurs/Johannes Fuchs 1 Was ist ein Microcontroller Wikipedia: A microcontroller (sometimes abbreviated µc, uc or MCU) is a small computer on a single integrated
Microcontroller Kurs 08.07.11 Microcontroller Kurs/Johannes Fuchs 1 Was ist ein Microcontroller Wikipedia: A microcontroller (sometimes abbreviated µc, uc or MCU) is a small computer on a single integrated
B1 Stapelspeicher (stack)
") B1 Stapelspeicher (stack) Arbeitsweise des LIFO-Stapelspeichers Im Kapitel "Unterprogramme" wurde schon erwähnt, dass Unterprogramme einen so genannten Stapelspeicher (Kellerspeicher, Stapel, stack) benötigen
B1 Stapelspeicher (stack) Arbeitsweise des LIFO-Stapelspeichers Im Kapitel "Unterprogramme" wurde schon erwähnt, dass Unterprogramme einen so genannten Stapelspeicher (Kellerspeicher, Stapel, stack) benötigen
Tag 3 Timer, ADC und PWM
 Tag 3 Timer, ADC und PWM 09/01/10 Fachbereich Physik Institut für Kernphysik Bastian Löher, Martin Konrad 1 Analog-Digital-Wandler Arbeitet durch schrittweise Näherung Aktivieren des ADCs durch ADC Enable
Tag 3 Timer, ADC und PWM 09/01/10 Fachbereich Physik Institut für Kernphysik Bastian Löher, Martin Konrad 1 Analog-Digital-Wandler Arbeitet durch schrittweise Näherung Aktivieren des ADCs durch ADC Enable
Interrupt-Programmierung
 Interrupt-Programmierung Am Beispiel des ATMEGA16 Microcontrollers Beispiel: Messung der Betriebszeit Die Betriebszeit zeigt an, wie lange der Rechner seit dem Booten läuft Hier: Aktualisierung der Betriebszeit
Interrupt-Programmierung Am Beispiel des ATMEGA16 Microcontrollers Beispiel: Messung der Betriebszeit Die Betriebszeit zeigt an, wie lange der Rechner seit dem Booten läuft Hier: Aktualisierung der Betriebszeit
Atmel AVR für Dummies
 Atmel AVR für Dummies fd0@koeln.ccc.de 29.12.2005 Übersicht 1 Hardware Kurzvorstellung Atmega8 Programmierkabel (Eigenbau vs. Kommerzlösung) Alternative: Bootloader (Programmieren via rs232) Software Speicher
Atmel AVR für Dummies fd0@koeln.ccc.de 29.12.2005 Übersicht 1 Hardware Kurzvorstellung Atmega8 Programmierkabel (Eigenbau vs. Kommerzlösung) Alternative: Bootloader (Programmieren via rs232) Software Speicher
Einführung in die Welt der Microcontroller
 Übersicht Microcontroller Schaltungen Sonstiges Einführung in die Welt der Microcontroller Übersicht Microcontroller Schaltungen Sonstiges Inhaltsverzeichnis 1 Übersicht Möglichkeiten Einsatz 2 Microcontroller
Übersicht Microcontroller Schaltungen Sonstiges Einführung in die Welt der Microcontroller Übersicht Microcontroller Schaltungen Sonstiges Inhaltsverzeichnis 1 Übersicht Möglichkeiten Einsatz 2 Microcontroller
Einführung in AVR-Assembler
 Einführung in AVR-Assembler Easterhack 2008 Chaos Computer Club Cologne Stefan Schürmans, BlinkenArea stefan@blinkenarea.org Version 1.0.4 Easterhack 2008 Einführung in AVR-Assembler 1 Inhalt Vorstellung
Einführung in AVR-Assembler Easterhack 2008 Chaos Computer Club Cologne Stefan Schürmans, BlinkenArea stefan@blinkenarea.org Version 1.0.4 Easterhack 2008 Einführung in AVR-Assembler 1 Inhalt Vorstellung
Programmierung Tiny45 für DCC Lokdecoder
 Programmierung Tiny45 für DCC Lokdecoder Hier eine Beschreibung, der Programmierung des Tiny45 für den Lokdecoder. Zur Erstprogrammierung ist ein Programmer für Atmels AVR Mikrokontroller nötig (AVRISP
Programmierung Tiny45 für DCC Lokdecoder Hier eine Beschreibung, der Programmierung des Tiny45 für den Lokdecoder. Zur Erstprogrammierung ist ein Programmer für Atmels AVR Mikrokontroller nötig (AVRISP
Tag 2 Eingabe und Interrupts
 Tag 2 Eingabe und Interrupts 08/30/10 Fachbereich Physik Institut für Kernphysik Bastian Löher, Martin Konrad 1 Taster Direkt an Portpin angeschlossen (etwa PINB0, PIND3) Pull-Up-Widerstände einschalten!
Tag 2 Eingabe und Interrupts 08/30/10 Fachbereich Physik Institut für Kernphysik Bastian Löher, Martin Konrad 1 Taster Direkt an Portpin angeschlossen (etwa PINB0, PIND3) Pull-Up-Widerstände einschalten!
CU-R-CONTROL. Beschreibung zur Schaltung ATMega16-32+ISP MC-Controller Steuerung auf Basis ATMEL Mega16/32. Autor: Christian Ulrich
 Seite 1 von 10 CU-R-CONTROL Beschreibung zur Schaltung ATMega16-32+ISP MC-Controller Steuerung auf Basis ATMEL Mega16/32 Autor: Christian Ulrich Datum: 08.12.2007 Version: 1.00 Seite 2 von 10 Inhalt Historie
Seite 1 von 10 CU-R-CONTROL Beschreibung zur Schaltung ATMega16-32+ISP MC-Controller Steuerung auf Basis ATMEL Mega16/32 Autor: Christian Ulrich Datum: 08.12.2007 Version: 1.00 Seite 2 von 10 Inhalt Historie
AVR-Mikrocontroller in BASCOM programmieren, Teil 3
 jean-claude.feltes@education.lu 1/8 AVR-Mikrocontroller in BASCOM programmieren, Teil 3 Alle Beispiele in diesem Kapitel beziehen sich auf den Mega8. Andere Controller können unterschiedliche Timer haben.
jean-claude.feltes@education.lu 1/8 AVR-Mikrocontroller in BASCOM programmieren, Teil 3 Alle Beispiele in diesem Kapitel beziehen sich auf den Mega8. Andere Controller können unterschiedliche Timer haben.
Wer in der Grundschule ein wenig aufgepasst hat, sollte in der Lage sein schriftlich eine Zahl durch eine zweite zu teilen.
 Teilen binär Teil 1 - Vorzeichenlose Ganzzahlen ============ Irgendwann steht jeder Programmieren vor diesem Problem. Wie teile ich eine Binärzahl durch eine zweite? Wer in der Grundschule ein wenig aufgepasst
Teilen binär Teil 1 - Vorzeichenlose Ganzzahlen ============ Irgendwann steht jeder Programmieren vor diesem Problem. Wie teile ich eine Binärzahl durch eine zweite? Wer in der Grundschule ein wenig aufgepasst
Mikrocontroller - Schnelleinstieg
 Mikrocontroller - Schnelleinstieg Am Beispiel des Atmel Mega8 Philipp Fabian Benedikt Maier Mikrocontroller Schnelleinstieg Seite 1 Mikrocontroller - Schnelleinstieg: - Was ist ein Mikrokontroller? - Welche
Mikrocontroller - Schnelleinstieg Am Beispiel des Atmel Mega8 Philipp Fabian Benedikt Maier Mikrocontroller Schnelleinstieg Seite 1 Mikrocontroller - Schnelleinstieg: - Was ist ein Mikrokontroller? - Welche
easyident Türöffner easyident Türöffner Art. Nr. FS-0007 FS Fertigungsservice
 easyident Türöffner Art. Nr. FS-0007 Wir freuen uns, das sie sich für unser Produkt easyident Türöffner, mit Transponder Technologie entschieden haben. Easyident Türöffner ist für Unterputzmontage in 55mm
easyident Türöffner Art. Nr. FS-0007 Wir freuen uns, das sie sich für unser Produkt easyident Türöffner, mit Transponder Technologie entschieden haben. Easyident Türöffner ist für Unterputzmontage in 55mm
Programmierung von ATMEL AVR Mikroprozessoren am Beispiel des ATtiny13. Teil 8: gavrasmw und weitere Beispiele
 Programmierung von ATMEL AVR Mikroprozessoren am Beispiel des ATtiny13 Eine Einführung in Aufbau, Funktionsweise, Programmierung und Nutzen von Mikroprozessoren Teil 8: gavrasmw und weitere Beispiele gavrasmw
Programmierung von ATMEL AVR Mikroprozessoren am Beispiel des ATtiny13 Eine Einführung in Aufbau, Funktionsweise, Programmierung und Nutzen von Mikroprozessoren Teil 8: gavrasmw und weitere Beispiele gavrasmw
Ein erstes Assembler-Projekt
 Das Attiny-Projekt Ein erstes Assembler-Projekt 1 Ein erstes Assembler-Projekt In diesem Kapitel wollen wir ein erstes einfaches Assembler-Programm für unsere Attiny-Platine schreiben. Worum soll es gehen?
Das Attiny-Projekt Ein erstes Assembler-Projekt 1 Ein erstes Assembler-Projekt In diesem Kapitel wollen wir ein erstes einfaches Assembler-Programm für unsere Attiny-Platine schreiben. Worum soll es gehen?
Für den CTC-Mode kann demnach TCCR1A komplett auf 0 gesetzt werden, weil WGM11 und WGM10 in diesem Register liegen und beide laut Tabelle 0 sind:
 Timerinterrupts beim Arduino Timer 1 (16bit) Register: Bits in den Registern und ihre Bedeutung: Für den CTC-Mode kann demnach TCCR1A komplett auf 0 gesetzt werden, weil WGM11 und WGM10 in diesem Register
Timerinterrupts beim Arduino Timer 1 (16bit) Register: Bits in den Registern und ihre Bedeutung: Für den CTC-Mode kann demnach TCCR1A komplett auf 0 gesetzt werden, weil WGM11 und WGM10 in diesem Register
Programmierung von ATMEL AVR Mikroprozessoren am Beispiel des ATtiny13. Teil VI: Programmieren an weiteren Beispielen
 Programmierung von ATMEL AVR Mikroprozessoren am Beispiel des ATtiny13 Eine Einführung in Aufbau, Funktionsweise, Programmierung und Nutzen von Mikroprozessoren Teil VI: Programmieren an weiteren Beispielen
Programmierung von ATMEL AVR Mikroprozessoren am Beispiel des ATtiny13 Eine Einführung in Aufbau, Funktionsweise, Programmierung und Nutzen von Mikroprozessoren Teil VI: Programmieren an weiteren Beispielen
Parallel-IO. Ports am ATmega128
 Parallel-IO Ansteuerung Miniprojekt Lauflicht Ports am ATmega128 PortE (PE7...PE0) alternativ, z.b. USART0 (RS232) 1 Pin von PortC Port C (PC7...PC0) 1 Parallel-IO-Port "Sammelsurium" verschiedener Speicher
Parallel-IO Ansteuerung Miniprojekt Lauflicht Ports am ATmega128 PortE (PE7...PE0) alternativ, z.b. USART0 (RS232) 1 Pin von PortC Port C (PC7...PC0) 1 Parallel-IO-Port "Sammelsurium" verschiedener Speicher
Local Control Network
 Netzspannungsüberwachung (Stromausfallerkennung) Die Aufgabe Nach einem Stromausfall soll der Status von Aktoren oder Funktionen wieder so hergestellt werden, wie er vor dem Stromausfall war. Die Netzspannungsüberwachung
Netzspannungsüberwachung (Stromausfallerkennung) Die Aufgabe Nach einem Stromausfall soll der Status von Aktoren oder Funktionen wieder so hergestellt werden, wie er vor dem Stromausfall war. Die Netzspannungsüberwachung
Interrupts. Funktionsprinzip. Funktionsprinzip. Beispiel in C
 Interrupts Funktionsprinzip Interrupts bei ATmega128 Beispiel in C Funktionsprinzip 1 Was ist ein Interrupt? C muss auf Ereignisse reagieren können, z.b.: - jemand drückt eine Taste - USART hat Daten empfangen
Interrupts Funktionsprinzip Interrupts bei ATmega128 Beispiel in C Funktionsprinzip 1 Was ist ein Interrupt? C muss auf Ereignisse reagieren können, z.b.: - jemand drückt eine Taste - USART hat Daten empfangen
Technische Informatik Basispraktikum Sommersemester 2001
 Technische Informatik Basispraktikum Sommersemester 2001 Protokoll zum Versuchstag 4 Datum: 21.6.2001 Gruppe: David Eißler/ Autor: Verwendete Messgeräte: - digitales Experimentierboard (EB6) - Netzgerät
Technische Informatik Basispraktikum Sommersemester 2001 Protokoll zum Versuchstag 4 Datum: 21.6.2001 Gruppe: David Eißler/ Autor: Verwendete Messgeräte: - digitales Experimentierboard (EB6) - Netzgerät
Kara-Programmierung AUFGABENSTELLUNG LERNPARCOURS. Abb. 1: Programmfenster. Welt neu erstellen; öffnen; erneut öffnen; speichern; speichern unter
 Kara-Programmierung AUFGABENSTELLUNG LERNPARCOURS Abb. 1: Programmfenster Welt neu erstellen; öffnen; erneut öffnen; speichern; speichern unter Programmfenster anzeigen Einstellungen öffnen Kara direkt
Kara-Programmierung AUFGABENSTELLUNG LERNPARCOURS Abb. 1: Programmfenster Welt neu erstellen; öffnen; erneut öffnen; speichern; speichern unter Programmfenster anzeigen Einstellungen öffnen Kara direkt
Makros sind Textersetzungen, welche vom Präprozessor aufgelöst werden. Dies Passiert bevor der Compiler die Datein verarbeitet.
 U4 4. Übung U4 4. Übung Besprechung Aufgabe 2 Makros Register I/O-Ports U4.1 U4-1 Makros U4-1 Makros Makros sind Textersetzungen, welche vom Präprozessor aufgelöst werden. Dies Passiert bevor der Compiler
U4 4. Übung U4 4. Übung Besprechung Aufgabe 2 Makros Register I/O-Ports U4.1 U4-1 Makros U4-1 Makros Makros sind Textersetzungen, welche vom Präprozessor aufgelöst werden. Dies Passiert bevor der Compiler
Handbuch B4000+ Preset Manager
 Handbuch B4000+ Preset Manager B4000+ authentic organ modeller Version 0.6 FERROFISH advanced audio applications Einleitung Mit der Software B4000+ Preset Manager können Sie Ihre in der B4000+ erstellten
Handbuch B4000+ Preset Manager B4000+ authentic organ modeller Version 0.6 FERROFISH advanced audio applications Einleitung Mit der Software B4000+ Preset Manager können Sie Ihre in der B4000+ erstellten
Bedienungsanleitung. Mailboxsystem
 Bedienungsanleitung für das integrierte Mailboxsystem Inhalt Bedienung des Mailboxsystems...2 Beschreibung:...2 Verfügbarkeit:...2 Mailboxbedienung am Systemtelefon durch Verwendung von codes...3 rogrammierung
Bedienungsanleitung für das integrierte Mailboxsystem Inhalt Bedienung des Mailboxsystems...2 Beschreibung:...2 Verfügbarkeit:...2 Mailboxbedienung am Systemtelefon durch Verwendung von codes...3 rogrammierung
Zähler- und Zeitgeber-Baugruppen
 Zähler- und Zeitgeber-Baugruppen Sinn: häufig müssen Zeitbedingungen eingehalten werden z.b.: einige ms warten, Häufigkeit von Ereignissen zählen etc... Lösung: 1.) Zeitschleifen = Programm abarbeiten,
Zähler- und Zeitgeber-Baugruppen Sinn: häufig müssen Zeitbedingungen eingehalten werden z.b.: einige ms warten, Häufigkeit von Ereignissen zählen etc... Lösung: 1.) Zeitschleifen = Programm abarbeiten,
Versuch 3: Sequenzielle Logik
 Versuch 3: Sequenzielle Logik Versuchsvorbereitung 1. (2 Punkte) Unterschied zwischen Flipflop und Latch: Ein Latch ist transparent für einen bestimmten Zustand des Taktsignals: Jeder Datensignalwechsel
Versuch 3: Sequenzielle Logik Versuchsvorbereitung 1. (2 Punkte) Unterschied zwischen Flipflop und Latch: Ein Latch ist transparent für einen bestimmten Zustand des Taktsignals: Jeder Datensignalwechsel
Einführung in AVR Assembler
 Einführung in AVR Assembler Dennis Fassbender Institut für Technik Autonomer Systeme (LRT8) Universität der Bundeswehr München 09042014 Was ist Assembler? Low-level-Programmiersprache Erlaubt direkten
Einführung in AVR Assembler Dennis Fassbender Institut für Technik Autonomer Systeme (LRT8) Universität der Bundeswehr München 09042014 Was ist Assembler? Low-level-Programmiersprache Erlaubt direkten
B e d i e n u n g s a n l e i t u n g N O R T E S K O N A X - 4
 B e d i e n u n g s a n l e i t u n g N O R T E S K O N A X - 4 I I 1 Grundeinstellungen im Steuerungskasten Im Steuerungskasten des Whirlpools befindet sich dieser Schalter: Bevor sie Änderungen am Steuerungskasten
B e d i e n u n g s a n l e i t u n g N O R T E S K O N A X - 4 I I 1 Grundeinstellungen im Steuerungskasten Im Steuerungskasten des Whirlpools befindet sich dieser Schalter: Bevor sie Änderungen am Steuerungskasten
Einrichtung des Cisco VPN Clients (IPSEC) in Windows7
 in Windows7") Einrichtung des Cisco VPN Clients (IPSEC) in Windows7 Diese Verbindung muss einmalig eingerichtet werden und wird benötigt, um den Zugriff vom privaten Rechner oder der Workstation im Home Office über
Einrichtung des Cisco VPN Clients (IPSEC) in Windows7 Diese Verbindung muss einmalig eingerichtet werden und wird benötigt, um den Zugriff vom privaten Rechner oder der Workstation im Home Office über
Ablaufsteuerung Sequenzer, als Schaltstufen für den Amateurfunk.
 Ablaufsteuerung Sequenzer, als Schaltstufen für den Amateurfunk. DF1JM Juli 2011 Eine Sequenz ist eine Reihenfolge. Auf den Amateurfunk bezogen sind Sequenzer Schaltstufen, die in einer festgelegten Zeit-
Ablaufsteuerung Sequenzer, als Schaltstufen für den Amateurfunk. DF1JM Juli 2011 Eine Sequenz ist eine Reihenfolge. Auf den Amateurfunk bezogen sind Sequenzer Schaltstufen, die in einer festgelegten Zeit-
Serie 8: Microcontroller 17./18.07.2014
 Serie 8: Microcontroller 17./18.07.2014 I. Ziel der Versuche Erster Erfahrungen mit einem Microcontroller sollen gesammelt werden, die grundlegenden Ein- Ausgabe-Operationen werden realisiert. II. Vorkenntnisse
Serie 8: Microcontroller 17./18.07.2014 I. Ziel der Versuche Erster Erfahrungen mit einem Microcontroller sollen gesammelt werden, die grundlegenden Ein- Ausgabe-Operationen werden realisiert. II. Vorkenntnisse
einfache PIC-Übungsprogramme
 einfache PIC-Übungsprogramme Schreibe in MPLAB für das PIC-Übungsboard 01 mit dem PIC16F88 folgendes Programm, assembliere und dokumentiere dieses, schreibe es anschließend mittels dem Programmiergerät
einfache PIC-Übungsprogramme Schreibe in MPLAB für das PIC-Übungsboard 01 mit dem PIC16F88 folgendes Programm, assembliere und dokumentiere dieses, schreibe es anschließend mittels dem Programmiergerät
Mit der Maus im Menü links auf den Menüpunkt 'Seiten' gehen und auf 'Erstellen klicken.
 Seite erstellen Mit der Maus im Menü links auf den Menüpunkt 'Seiten' gehen und auf 'Erstellen klicken. Es öffnet sich die Eingabe Seite um eine neue Seite zu erstellen. Seiten Titel festlegen Den neuen
Seite erstellen Mit der Maus im Menü links auf den Menüpunkt 'Seiten' gehen und auf 'Erstellen klicken. Es öffnet sich die Eingabe Seite um eine neue Seite zu erstellen. Seiten Titel festlegen Den neuen
Hex Datei mit Atmel Studio 6 erstellen
 Hex Datei mit Atmel Studio 6 erstellen Es werden generell keine Atmel Studio Dateien ins Repository geladen, da jeder seine Dateien an anderen Orten liegen hat und weil nicht jeder das Atmel Studio 6 benutzt.
Hex Datei mit Atmel Studio 6 erstellen Es werden generell keine Atmel Studio Dateien ins Repository geladen, da jeder seine Dateien an anderen Orten liegen hat und weil nicht jeder das Atmel Studio 6 benutzt.
mit SD-Karte SD-Karte Inhalt
 mit mit Kartensteckplatz Der Logger ist optional mit einem Kartensteckplatz für eine micro erhältlich. Die verfügt über ein Vielfaches der Speicherkapazität des internen Logger- Speichers. Inhalt Zeitlicher
mit mit Kartensteckplatz Der Logger ist optional mit einem Kartensteckplatz für eine micro erhältlich. Die verfügt über ein Vielfaches der Speicherkapazität des internen Logger- Speichers. Inhalt Zeitlicher
Einrichten einer Toolchain zur Programmierung des Nibo 2 Roboters mit Atmel Studio 6
 Einrichten einer Toolchain zur Programmierung des Nibo 2 Roboters mit Atmel Studio 6 Ing. Holger Kölle M.Sc. 26. Mai 2014 1 Projekteinstellungen in Atmel Studio 6 1. Starten Sie Atmel Studio 6, zu finden
Einrichten einer Toolchain zur Programmierung des Nibo 2 Roboters mit Atmel Studio 6 Ing. Holger Kölle M.Sc. 26. Mai 2014 1 Projekteinstellungen in Atmel Studio 6 1. Starten Sie Atmel Studio 6, zu finden
Programmierung von ATMEL AVR Mikroprozessoren am Beispiel des ATtiny13. Teil 8: Ein Sinusgenerator mit AVR-Timer
 Programmierung von ATMEL AVR Mikroprozessoren am Beispiel des ATtiny13 Eine Einführung in Aufbau, Funktionsweise, Programmierung und Nutzen von Mikroprozessoren Teil 8: Ein Sinusgenerator mit AVR-Timer
Programmierung von ATMEL AVR Mikroprozessoren am Beispiel des ATtiny13 Eine Einführung in Aufbau, Funktionsweise, Programmierung und Nutzen von Mikroprozessoren Teil 8: Ein Sinusgenerator mit AVR-Timer
"Memory Stick" zur Programmierung der comfort 8+ Lichtsteuranlage mit PC Software "scenes editor"
 comfort 8+ IRPC "Memory Stick" zur Programmierung der comfort 8+ Lichtsteuranlage mit PC Software "scenes editor" 1: Programmstart, Einstellungen 1.1 Zuerst die Software der beiliegenden CD-ROM auf einem
comfort 8+ IRPC "Memory Stick" zur Programmierung der comfort 8+ Lichtsteuranlage mit PC Software "scenes editor" 1: Programmstart, Einstellungen 1.1 Zuerst die Software der beiliegenden CD-ROM auf einem
iphone-kontakte zu Exchange übertragen
 iphone-kontakte zu Exchange übertragen Übertragen von iphone-kontakten in ein Exchange Postfach Zunächst muss das iphone an den Rechner, an dem es üblicherweise synchronisiert wird, angeschlossen werden.
iphone-kontakte zu Exchange übertragen Übertragen von iphone-kontakten in ein Exchange Postfach Zunächst muss das iphone an den Rechner, an dem es üblicherweise synchronisiert wird, angeschlossen werden.
Informationen zur Bedienung des Anrufbeantworters
 Informationen zur Bedienung des Anrufbeantworters - Die neue Telefonanlage der Firma Siemens stellt für die Anrufbeantworter- und Faxfunktion einen eigenen Server (Produktname: Xpressions) bereit. - Über
Informationen zur Bedienung des Anrufbeantworters - Die neue Telefonanlage der Firma Siemens stellt für die Anrufbeantworter- und Faxfunktion einen eigenen Server (Produktname: Xpressions) bereit. - Über
Mit dem sogenannten Seriendruck können Etiketten und Briefe mit einer Adressdatei (z. B. Excel) verknüpft werden.
 verknüpft werden.") WORD 2010 Etiketten drucken Mit dem sogenannten Seriendruck können Etiketten und Briefe mit einer Adressdatei (z. B. Excel) verknüpft werden. Diese Anwendung erfolgt über die Registerkarte Sendungen 1
WORD 2010 Etiketten drucken Mit dem sogenannten Seriendruck können Etiketten und Briefe mit einer Adressdatei (z. B. Excel) verknüpft werden. Diese Anwendung erfolgt über die Registerkarte Sendungen 1
ATMega2560Controllerboard
 RIBU ELEKTRONIK VERSAND Mühlenweg 6. 8160 Preding. Tel. 017/64800. Fax 64806 Mail: office1@ribu.at. Internet: http://www.ribu.at ATMega560Controllerboard nur 66 x 40 mm große 4 fach Multilayer Platine
RIBU ELEKTRONIK VERSAND Mühlenweg 6. 8160 Preding. Tel. 017/64800. Fax 64806 Mail: office1@ribu.at. Internet: http://www.ribu.at ATMega560Controllerboard nur 66 x 40 mm große 4 fach Multilayer Platine
Analog-Digital-Converter
 Analog-Digital-Converter Funktionsprinzip ADC bei ATmega128 Beispiel in C Funktionsprinzip 1 Analog-Digital-Wandlung Wandelt analoge Spannung / analogen Strom (Messgröße) in einen binären Wert um, der
Analog-Digital-Converter Funktionsprinzip ADC bei ATmega128 Beispiel in C Funktionsprinzip 1 Analog-Digital-Wandlung Wandelt analoge Spannung / analogen Strom (Messgröße) in einen binären Wert um, der
Elektrische Logigsystem mit Rückführung
 Mathias Arbeiter 23. Juni 2006 Betreuer: Herr Bojarski Elektrische Logigsystem mit Rückführung Von Triggern, Registern und Zählern Inhaltsverzeichnis 1 Trigger 3 1.1 RS-Trigger ohne Takt......................................
Mathias Arbeiter 23. Juni 2006 Betreuer: Herr Bojarski Elektrische Logigsystem mit Rückführung Von Triggern, Registern und Zählern Inhaltsverzeichnis 1 Trigger 3 1.1 RS-Trigger ohne Takt......................................
Rechnerarchitektur Atmega 32. 1 Vortrag Atmega 32. Von Urs Müller und Marion Knoth. Urs Müller Seite 1 von 7
 1 Vortrag Atmega 32 Von Urs Müller und Marion Knoth Urs Müller Seite 1 von 7 Inhaltsverzeichnis 1 Vortrag Atmega 32 1 1.1 Einleitung 3 1.1.1 Hersteller ATMEL 3 1.1.2 AVR - Mikrocontroller Familie 3 2 Übersicht
1 Vortrag Atmega 32 Von Urs Müller und Marion Knoth Urs Müller Seite 1 von 7 Inhaltsverzeichnis 1 Vortrag Atmega 32 1 1.1 Einleitung 3 1.1.1 Hersteller ATMEL 3 1.1.2 AVR - Mikrocontroller Familie 3 2 Übersicht
Sophos Anti-Virus. ITSC Handbuch. Version... 1.0. Datum... 01.09.2009. Status... ( ) In Arbeit ( ) Bereit zum Review (x) Freigegeben ( ) Abgenommen
 In Arbeit ( ) Bereit zum Review (x) Freigegeben ( ) Abgenommen") Version... 1.0 Datum... 01.09.2009 Status... ( ) In Arbeit ( ) Bereit zum Review (x) Freigegeben ( ) Abgenommen Kontakt... Dateiname... helpdesk@meduniwien.ac.at Anmerkungen Dieses Dokument wird in elektronischer
Version... 1.0 Datum... 01.09.2009 Status... ( ) In Arbeit ( ) Bereit zum Review (x) Freigegeben ( ) Abgenommen Kontakt... Dateiname... helpdesk@meduniwien.ac.at Anmerkungen Dieses Dokument wird in elektronischer
Überblick: Programmierung der USB-Boards. Erstmalige Inbetriebnahme. Programmiervorgang:
 Überblick: Programmierung der USB-Boards Erstmalige Inbetriebnahme Flip 2.4.6 installieren, Installationspfad ohne Punkte und Leerzeichen wählen! Board an die USB-Schnittstelle anschließen Schiebeschalter
Überblick: Programmierung der USB-Boards Erstmalige Inbetriebnahme Flip 2.4.6 installieren, Installationspfad ohne Punkte und Leerzeichen wählen! Board an die USB-Schnittstelle anschließen Schiebeschalter
easyident Türöffner mit integriertem USB Interface
 easyident Türöffner mit integriertem USB Interface Art. Nr. FS-0007-B Wir freuen uns, das sie sich für unser Produkt easyident Türöffner, mit Transponder Technologie entschieden haben. Easyident Türöffner
easyident Türöffner mit integriertem USB Interface Art. Nr. FS-0007-B Wir freuen uns, das sie sich für unser Produkt easyident Türöffner, mit Transponder Technologie entschieden haben. Easyident Türöffner
Internet online Update (Internet Explorer)
") Um Ihr Consoir Beta immer schnell und umkompliziert auf den aktuellsten Stand zu bringen, bieten wir allen Kunden ein Internet Update an. Öffnen Sie Ihren Internetexplorer und gehen auf unsere Internetseite:
Um Ihr Consoir Beta immer schnell und umkompliziert auf den aktuellsten Stand zu bringen, bieten wir allen Kunden ein Internet Update an. Öffnen Sie Ihren Internetexplorer und gehen auf unsere Internetseite:
Übungscomputer mit Prozessor 8085 - Bedienungsanleitung
 Seite 1 von 9 Pinbelegung der Steckerleisten im Übungsgerät Seite 2 von 9 Inbetriebnahme: Schalter S1, S2, und S3 in Stellung 1 (oben) schalten. Spannung 5 V anlegen. ACHTUNG auf Polarität achten. Taste
Seite 1 von 9 Pinbelegung der Steckerleisten im Übungsgerät Seite 2 von 9 Inbetriebnahme: Schalter S1, S2, und S3 in Stellung 1 (oben) schalten. Spannung 5 V anlegen. ACHTUNG auf Polarität achten. Taste
Benutzung der Avid Liquid Edition Schnittplätze an der Universität Innsbruck
 Benutzung der Avid Liquid Edition Schnittplätze an der Universität Innsbruck Diese Anleitung muss bei jedem Start von Avid Liquid Edition befolgt werden, da sonst das Schneiden der Videos nicht möglich
Benutzung der Avid Liquid Edition Schnittplätze an der Universität Innsbruck Diese Anleitung muss bei jedem Start von Avid Liquid Edition befolgt werden, da sonst das Schneiden der Videos nicht möglich
SP-1101W/SP-2101W Quick Installation Guide
 SP-1101W/SP-2101W Quick Installation Guide 05-2014 / v1.0 1 I. Produktinformationen I-1. Verpackungsinhalt I-2. Smart Plug-Schalter Schnellinstallationsanleitung CD mit Schnellinstallationsan leitung Vorderseite
SP-1101W/SP-2101W Quick Installation Guide 05-2014 / v1.0 1 I. Produktinformationen I-1. Verpackungsinhalt I-2. Smart Plug-Schalter Schnellinstallationsanleitung CD mit Schnellinstallationsan leitung Vorderseite
Binäre Bäume. 1. Allgemeines. 2. Funktionsweise. 2.1 Eintragen
 Binäre Bäume 1. Allgemeines Binäre Bäume werden grundsätzlich verwendet, um Zahlen der Größe nach, oder Wörter dem Alphabet nach zu sortieren. Dem einfacheren Verständnis zu Liebe werde ich mich hier besonders
Binäre Bäume 1. Allgemeines Binäre Bäume werden grundsätzlich verwendet, um Zahlen der Größe nach, oder Wörter dem Alphabet nach zu sortieren. Dem einfacheren Verständnis zu Liebe werde ich mich hier besonders
Telefonschnittstelle Art.Nr. 1211/131G
 Telefonschnittstelle Art.Nr. 1211/131G Achtung! Vor der ersten Verwendung sollte die Besetztonauswertung angepasst werden Mit dieser Schnittstelle kann die PROMAS, ein Extension-Modul 1211/EXT, oder ein
Telefonschnittstelle Art.Nr. 1211/131G Achtung! Vor der ersten Verwendung sollte die Besetztonauswertung angepasst werden Mit dieser Schnittstelle kann die PROMAS, ein Extension-Modul 1211/EXT, oder ein
Leichte-Sprache-Bilder
 Leichte-Sprache-Bilder Reinhild Kassing Information - So geht es 1. Bilder gucken 2. anmelden für Probe-Bilder 3. Bilder bestellen 4. Rechnung bezahlen 5. Bilder runterladen 6. neue Bilder vorschlagen
Leichte-Sprache-Bilder Reinhild Kassing Information - So geht es 1. Bilder gucken 2. anmelden für Probe-Bilder 3. Bilder bestellen 4. Rechnung bezahlen 5. Bilder runterladen 6. neue Bilder vorschlagen
Multitasking / virtuelle Maschinen mittels Atmel AVR- Mikrocontrollern (Simple & Stupid)
") VM/AVR SIMPLE & STUPID 1 Multitasking / virtuelle Maschinen mittels Atmel AVR- Mikrocontrollern (Simple & Stupid) Stand: 26. 1. 2010 Zweck: Elementare Demonstration der Mehrprogrammausführung auf Grundlage
VM/AVR SIMPLE & STUPID 1 Multitasking / virtuelle Maschinen mittels Atmel AVR- Mikrocontrollern (Simple & Stupid) Stand: 26. 1. 2010 Zweck: Elementare Demonstration der Mehrprogrammausführung auf Grundlage
Stepperfocuser 2.0 mit Bootloader
 Stepperfocuser 2.0 mit Bootloader Info Für den Stepperfocuser 2.0 gibt es einen Bootloader. Dieser ermöglicht es, die Firmware zu aktualisieren ohne dass man ein spezielles Programmiergerät benötigt. Die
Stepperfocuser 2.0 mit Bootloader Info Für den Stepperfocuser 2.0 gibt es einen Bootloader. Dieser ermöglicht es, die Firmware zu aktualisieren ohne dass man ein spezielles Programmiergerät benötigt. Die
Datensicherung. Beschreibung der Datensicherung
 Datensicherung Mit dem Datensicherungsprogramm können Sie Ihre persönlichen Daten problemlos Sichern. Es ist möglich eine komplette Datensicherung durchzuführen, aber auch nur die neuen und geänderten
Datensicherung Mit dem Datensicherungsprogramm können Sie Ihre persönlichen Daten problemlos Sichern. Es ist möglich eine komplette Datensicherung durchzuführen, aber auch nur die neuen und geänderten
Eine Anleitung von Holger Bein. Holger Bein 2005
 Holger Bein 2005 Eine Anleitung von Holger Bein Bildergalerie erstellen mit dem Web Album Generator Was wir brauchen: 1. Speicherplatz (z.b. bei freenet.de) 2. das Programm Web Album Generator 3. einen
Holger Bein 2005 Eine Anleitung von Holger Bein Bildergalerie erstellen mit dem Web Album Generator Was wir brauchen: 1. Speicherplatz (z.b. bei freenet.de) 2. das Programm Web Album Generator 3. einen
Dokumentation IBIS Monitor
 Dokumentation IBIS Monitor Seite 1 von 16 11.01.06 Inhaltsverzeichnis 1. Allgemein 2. Installation und Programm starten 3. Programmkonfiguration 4. Aufzeichnung 4.1 Aufzeichnung mitschneiden 4.1.1 Inhalt
Dokumentation IBIS Monitor Seite 1 von 16 11.01.06 Inhaltsverzeichnis 1. Allgemein 2. Installation und Programm starten 3. Programmkonfiguration 4. Aufzeichnung 4.1 Aufzeichnung mitschneiden 4.1.1 Inhalt
Basisanforderungen: EVA-Prinzips. Erweiterte Anforderungen: wirtschaftlichen und privaten Alltag.
 Basisanforderungen: 1. Erstelle eine einfache Motor-Steuerung (siehe Anforderungen) 2. Erläutere den Begriff Steuerung. 3. Benenne die Sensoren und Aktoren dieser Steuerung. 4. Beschreibe die Informationsverarbeitung
Basisanforderungen: 1. Erstelle eine einfache Motor-Steuerung (siehe Anforderungen) 2. Erläutere den Begriff Steuerung. 3. Benenne die Sensoren und Aktoren dieser Steuerung. 4. Beschreibe die Informationsverarbeitung
Eine Anwendung mit InstantRails 1.7
 Eine Anwung mit InstantRails 1.7 Beschrieben wird das Anlegen einer einfachen Rails-Anwung, die ohne Datenbank auskommt. Schwerpunktmäßig wird auf den Zusammenhang von Controllern, Views und der zugehörigen
Eine Anwung mit InstantRails 1.7 Beschrieben wird das Anlegen einer einfachen Rails-Anwung, die ohne Datenbank auskommt. Schwerpunktmäßig wird auf den Zusammenhang von Controllern, Views und der zugehörigen
Projekt Nr. 15: Einen elektronischen Würfel erstellen
 Nun wissen Sie, wie Sie Zufallszahlen erzeugen können. Als Nächstes wollen wir diese neuen Kenntnisse gleich in die Tat umsetzen, indem wir einen elektronischen Würfel konstruieren. Projekt Nr. 15: Einen
Nun wissen Sie, wie Sie Zufallszahlen erzeugen können. Als Nächstes wollen wir diese neuen Kenntnisse gleich in die Tat umsetzen, indem wir einen elektronischen Würfel konstruieren. Projekt Nr. 15: Einen
Zunächst empfehlen wir Ihnen die bestehenden Daten Ihres Gerätes auf USB oder im internen Speicher des Gerätes zu sichern.
 Anleitung zum Softwareupdate Eycos S 75.15 HD+ Eine falsche Vorgehensweise während des Updates kann schwere Folgen haben. Sie sollten auf jeden Fall vermeiden, während des laufenden Updates die Stromversorgung
Anleitung zum Softwareupdate Eycos S 75.15 HD+ Eine falsche Vorgehensweise während des Updates kann schwere Folgen haben. Sie sollten auf jeden Fall vermeiden, während des laufenden Updates die Stromversorgung
Update EPOC. 1. Inhaltsverzeichnis
 Update EPOC 1. Inhaltsverzeichnis 1. Inhaltsverzeichnis... 1 2. Einleitung... 2 3. Von Axon Lab AG kostenlos per Paket zur Verfügung gestelltes Material... 2 4. Software Download... 3 5. EPOC Typ und benötigtes
Update EPOC 1. Inhaltsverzeichnis 1. Inhaltsverzeichnis... 1 2. Einleitung... 2 3. Von Axon Lab AG kostenlos per Paket zur Verfügung gestelltes Material... 2 4. Software Download... 3 5. EPOC Typ und benötigtes
Klassendiagramm der UML mit SiSy-AVR Schnelleinstieg am Beispiel myethernet-projekt
 Klassendiagramm der UML mit SiSy-AVR Schnelleinstieg am Beispiel myethernet-projekt Zielstellung Dieser Schnelleinstieg demonstriert das Arbeiten mit dem Klassendiagramm in SiSy AVR, am Beispiel des myethernet-projektes.
Klassendiagramm der UML mit SiSy-AVR Schnelleinstieg am Beispiel myethernet-projekt Zielstellung Dieser Schnelleinstieg demonstriert das Arbeiten mit dem Klassendiagramm in SiSy AVR, am Beispiel des myethernet-projektes.
ATtiny13-Experimentier-Board
 ATtiny13-Experimentier-Board Gerhard Schmidt, Kastanienallee 20, D-64289 Darmstadt, http://www.avr-asm-tutorial.net Februar 2009 ATtiny13-Experimentier-Board Seite 2 Inhalt Beschreibung Hardware Copyright
ATtiny13-Experimentier-Board Gerhard Schmidt, Kastanienallee 20, D-64289 Darmstadt, http://www.avr-asm-tutorial.net Februar 2009 ATtiny13-Experimentier-Board Seite 2 Inhalt Beschreibung Hardware Copyright
FLASH USB 2. 0. Einführung DEUTSCH
 DEUTSCH FLASH ROTE LED (GESPERRT) GRÜNE LED (ENTSPERRT) SCHLÜSSEL-TASTE PIN-TASTEN BLAUE LED (AKTIVITÄT) Einführung Herzlichen Dank für Ihren Kauf des Corsair Flash Padlock 2. Ihr neues Flash Padlock 2
DEUTSCH FLASH ROTE LED (GESPERRT) GRÜNE LED (ENTSPERRT) SCHLÜSSEL-TASTE PIN-TASTEN BLAUE LED (AKTIVITÄT) Einführung Herzlichen Dank für Ihren Kauf des Corsair Flash Padlock 2. Ihr neues Flash Padlock 2
Quanton Manual (de) Datum: 20.06.2013 URL: http://wiki:8090/pages/viewpage.action?pageid=9928792 )
 Datum: 20.06.2013 URL: http://wiki:8090/pages/viewpage.action?pageid=9928792 )") Datum: 20.06.2013 URL: http://wiki:8090/pages/viewpage.action?pageid=9928792 ) Inhaltsverzeichnis 1 quanton flight control rev. 1 3 1.1 Anschlüsse für Peripheriegeräte 3 1.1.1 Eingänge / Ausgänge 3 1.1.2
Datum: 20.06.2013 URL: http://wiki:8090/pages/viewpage.action?pageid=9928792 ) Inhaltsverzeichnis 1 quanton flight control rev. 1 3 1.1 Anschlüsse für Peripheriegeräte 3 1.1.1 Eingänge / Ausgänge 3 1.1.2
Tutorial: Entlohnungsberechnung erstellen mit LibreOffice Calc 3.5
 Tutorial: Entlohnungsberechnung erstellen mit LibreOffice Calc 3.5 In diesem Tutorial will ich Ihnen zeigen, wie man mit LibreOffice Calc 3.5 eine einfache Entlohnungsberechnung erstellt, wobei eine automatische
Tutorial: Entlohnungsberechnung erstellen mit LibreOffice Calc 3.5 In diesem Tutorial will ich Ihnen zeigen, wie man mit LibreOffice Calc 3.5 eine einfache Entlohnungsberechnung erstellt, wobei eine automatische
Erstellen von x-y-diagrammen in OpenOffice.calc
 Erstellen von x-y-diagrammen in OpenOffice.calc In dieser kleinen Anleitung geht es nur darum, aus einer bestehenden Tabelle ein x-y-diagramm zu erzeugen. D.h. es müssen in der Tabelle mindestens zwei
Erstellen von x-y-diagrammen in OpenOffice.calc In dieser kleinen Anleitung geht es nur darum, aus einer bestehenden Tabelle ein x-y-diagramm zu erzeugen. D.h. es müssen in der Tabelle mindestens zwei
Variablen & erweiterte Aktionen nutzen
 341 In Captivate können Sie mit Hilfe von Variablen Texte & Werte speichern oder Systeminformationen ausgeben. Außerdem können Sie auf Basis von Variablen komplexere Aktionen entwickeln, wie z. B. eine
341 In Captivate können Sie mit Hilfe von Variablen Texte & Werte speichern oder Systeminformationen ausgeben. Außerdem können Sie auf Basis von Variablen komplexere Aktionen entwickeln, wie z. B. eine
Für Windows 7 Stand: 21.01.2013
 Für Windows 7 Stand: 21.01.2013 1 Überblick Alle F.A.S.T. Messgeräte verfügen über dieselbe USB-Seriell Hardware, welche einen Com- Port zur Kommunikation im System zur Verfügung stellt. Daher kann bei
Für Windows 7 Stand: 21.01.2013 1 Überblick Alle F.A.S.T. Messgeräte verfügen über dieselbe USB-Seriell Hardware, welche einen Com- Port zur Kommunikation im System zur Verfügung stellt. Daher kann bei
32-Bit Microcontroller based, passive and intelligent UHF RFID Gen2 Tag. Zürcher Fachhochschule
 32-Bit Microcontroller based, passive and intelligent UHF RFID Gen2 Tag Inhalt Vorgeschichte Was wurde erreicht Hardware Energy Micro Microcontroller µctag Plattform EPC Gen2 Tag Standard Protokoll-Vorgaben
32-Bit Microcontroller based, passive and intelligent UHF RFID Gen2 Tag Inhalt Vorgeschichte Was wurde erreicht Hardware Energy Micro Microcontroller µctag Plattform EPC Gen2 Tag Standard Protokoll-Vorgaben
Teil III: Wat macht ene Mikrokontroller?
 Programmierung von ATMEL AVR Mikroprozessoren am Beispiel des ATtiny13 Eine Einführung in Aufbau, Funktionsweise, Programmierung und Nutzen von Mikroprozessoren Teil III: Wat macht ene Mikrokontroller?
Programmierung von ATMEL AVR Mikroprozessoren am Beispiel des ATtiny13 Eine Einführung in Aufbau, Funktionsweise, Programmierung und Nutzen von Mikroprozessoren Teil III: Wat macht ene Mikrokontroller?
Datenübernahme von HKO 5.9 zur. Advolux Kanzleisoftware
 Datenübernahme von HKO 5.9 zur Advolux Kanzleisoftware Die Datenübernahme (DÜ) von HKO 5.9 zu Advolux Kanzleisoftware ist aufgrund der von Update zu Update veränderten Datenbank (DB)-Strukturen in HKO
Datenübernahme von HKO 5.9 zur Advolux Kanzleisoftware Die Datenübernahme (DÜ) von HKO 5.9 zu Advolux Kanzleisoftware ist aufgrund der von Update zu Update veränderten Datenbank (DB)-Strukturen in HKO
Wahltaste der Punktzüge. Hier drücken für die Steuerung der Punktzüge. PZ Posidisplay-light
 ÜBEBLICK 19 TOUCHSCEEN WAHL EINES ZU KONTOLLIEENDEN GEÄTE-TYPS: Die Auswahl der Gerätetypen die man vom Posidisplay-light aus steuern kann sind im oberen Teil des Bildschirmes angezeigt. Wahltaste der
ÜBEBLICK 19 TOUCHSCEEN WAHL EINES ZU KONTOLLIEENDEN GEÄTE-TYPS: Die Auswahl der Gerätetypen die man vom Posidisplay-light aus steuern kann sind im oberen Teil des Bildschirmes angezeigt. Wahltaste der
Stundenerfassung Version 1.8 Anleitung Arbeiten mit Replikaten
 Stundenerfassung Version 1.8 Anleitung Arbeiten mit Replikaten 2008 netcadservice GmbH netcadservice GmbH Augustinerstraße 3 D-83395 Freilassing Dieses Programm ist urheberrechtlich geschützt. Eine Weitergabe
Stundenerfassung Version 1.8 Anleitung Arbeiten mit Replikaten 2008 netcadservice GmbH netcadservice GmbH Augustinerstraße 3 D-83395 Freilassing Dieses Programm ist urheberrechtlich geschützt. Eine Weitergabe
Sollten während der Benutzung Probleme auftreten, können Sie die folgende Liste zur Problembehebung benutzen, um eine Lösung zu finden.
 12. Problembehebung Sollten während der Benutzung Probleme auftreten, können Sie die folgende Liste zur Problembehebung benutzen, um eine Lösung zu finden. Sollte Ihr Problem nicht mit Hilfe dieser Liste
12. Problembehebung Sollten während der Benutzung Probleme auftreten, können Sie die folgende Liste zur Problembehebung benutzen, um eine Lösung zu finden. Sollte Ihr Problem nicht mit Hilfe dieser Liste
Druck von bzw. Scan auf USB-Stick
 Druck von bzw. Scan auf USB-Stick Die Kopierer vom Typ C353 und C552 (das sind die mit dem Farbdisplay) können mit einem USB- Stick benutzt werden. Sie können auf Ihren USB-Stick scannen oder PDF-Dateien
Druck von bzw. Scan auf USB-Stick Die Kopierer vom Typ C353 und C552 (das sind die mit dem Farbdisplay) können mit einem USB- Stick benutzt werden. Sie können auf Ihren USB-Stick scannen oder PDF-Dateien
Mikrocontroller Grundlagen. Markus Koch April 2011
 Mikrocontroller Grundlagen Markus Koch April 2011 Übersicht Was ist ein Mikrocontroller Aufbau (CPU/RAM/ROM/Takt/Peripherie) Unterschied zum Mikroprozessor Unterschiede der Controllerarten Unterschiede
Mikrocontroller Grundlagen Markus Koch April 2011 Übersicht Was ist ein Mikrocontroller Aufbau (CPU/RAM/ROM/Takt/Peripherie) Unterschied zum Mikroprozessor Unterschiede der Controllerarten Unterschiede
Local Control Network Technische Dokumentation
 Steuerung von Hifi-Anlagen mit der LCN-GVS Häufig wird der Wunsch geäußert, eine Hi-Fi-Anlage in die Steuerung der LCN-GVS einzubinden. Auch das ist realisierbar. Für die hier gezeigte Lösung müssen wenige
Steuerung von Hifi-Anlagen mit der LCN-GVS Häufig wird der Wunsch geäußert, eine Hi-Fi-Anlage in die Steuerung der LCN-GVS einzubinden. Auch das ist realisierbar. Für die hier gezeigte Lösung müssen wenige
Grundlagen der Informatik
 Mag. Christian Gürtler Programmierung Grundlagen der Informatik 2011 Inhaltsverzeichnis I. Allgemeines 3 1. Zahlensysteme 4 1.1. ganze Zahlen...................................... 4 1.1.1. Umrechnungen.................................
Mag. Christian Gürtler Programmierung Grundlagen der Informatik 2011 Inhaltsverzeichnis I. Allgemeines 3 1. Zahlensysteme 4 1.1. ganze Zahlen...................................... 4 1.1.1. Umrechnungen.................................
SP-2101W Quick Installation Guide
 SP-2101W Quick Installation Guide 05-2014 / v1.0 1 I. Produktinformationen... 2 I-1. Verpackungsinhalt... 2 I-2. Vorderseite... 2 I-3. LED-Status... 3 I-4. Schalterstatus-Taste... 3 I-5. Produkt-Aufkleber...
SP-2101W Quick Installation Guide 05-2014 / v1.0 1 I. Produktinformationen... 2 I-1. Verpackungsinhalt... 2 I-2. Vorderseite... 2 I-3. LED-Status... 3 I-4. Schalterstatus-Taste... 3 I-5. Produkt-Aufkleber...
ORSYscan 4.0 HANDHABUNG UND FEHLERBEHEBUNG
 ORSYscan 4.0 HANDHABUNG UND FEHLERBEHEBUNG Seite 1 von 6 1 HINWEISE ZUR HANDHABUNG - Entfernen Sie nicht die Batterie, solange das Gerät noch eingeschaltet ist. Selbst bei schwacher Batterie muss sich
ORSYscan 4.0 HANDHABUNG UND FEHLERBEHEBUNG Seite 1 von 6 1 HINWEISE ZUR HANDHABUNG - Entfernen Sie nicht die Batterie, solange das Gerät noch eingeschaltet ist. Selbst bei schwacher Batterie muss sich
Wie in der Skizze zu sehen ist, bleibt die Periodendauer / Frequenz konstant und nur die Pulsweite ändert sich.
 Kapitel 2 Pulsweitenmodulation Die sogenannte Pulsweitenmodulation (kurz PWM) ist ein Rechtecksignal mit konstanter Periodendauer, das zwischen zwei verschiedenen Spannungspegeln oszilliert. Prinzipiell
Kapitel 2 Pulsweitenmodulation Die sogenannte Pulsweitenmodulation (kurz PWM) ist ein Rechtecksignal mit konstanter Periodendauer, das zwischen zwei verschiedenen Spannungspegeln oszilliert. Prinzipiell
ANLEITUNG. Firmware Flash. Seite 1 von 7
 ANLEITUNG Firmware Flash chiligreen LANDISK Seite 1 von 7 1 Inhaltsverzeichnis 1 Inhaltsverzeichnis... 2 2 Problembeschreibung... 3 3 Ursache... 3 4 Lösung... 3 5 Werkseinstellungen der LANDISK wiederherstellen...
ANLEITUNG Firmware Flash chiligreen LANDISK Seite 1 von 7 1 Inhaltsverzeichnis 1 Inhaltsverzeichnis... 2 2 Problembeschreibung... 3 3 Ursache... 3 4 Lösung... 3 5 Werkseinstellungen der LANDISK wiederherstellen...
1. Adressen für den Serienversand (Briefe Katalogdruck Werbung/Anfrage ) auswählen. Die Auswahl kann gespeichert werden.
 auswählen. Die Auswahl kann gespeichert werden.") Der Serienversand Was kann man mit der Maske Serienversand machen? 1. Adressen für den Serienversand (Briefe Katalogdruck Werbung/Anfrage ) auswählen. Die Auswahl kann gespeichert werden. 2. Adressen auswählen,
Der Serienversand Was kann man mit der Maske Serienversand machen? 1. Adressen für den Serienversand (Briefe Katalogdruck Werbung/Anfrage ) auswählen. Die Auswahl kann gespeichert werden. 2. Adressen auswählen,
Tutorial: Wie kann ich Dokumente verwalten?
 Tutorial: Wie kann ich Dokumente verwalten? Im vorliegenden Tutorial lernen Sie, wie Sie in myfactory Dokumente verwalten können. Dafür steht Ihnen in myfactory eine Dokumenten-Verwaltung zur Verfügung.
Tutorial: Wie kann ich Dokumente verwalten? Im vorliegenden Tutorial lernen Sie, wie Sie in myfactory Dokumente verwalten können. Dafür steht Ihnen in myfactory eine Dokumenten-Verwaltung zur Verfügung.
I Serverkalender in Thunderbird einrichten
 I Serverkalender in Thunderbird einrichten Damit Sie den Kalender auf dem SC-IT-Server nutzen können, schreiben Sie bitte zuerst eine Mail mit Ihrer Absicht an das SC-IT (hilfe@servicecenter-khs.de). Dann
I Serverkalender in Thunderbird einrichten Damit Sie den Kalender auf dem SC-IT-Server nutzen können, schreiben Sie bitte zuerst eine Mail mit Ihrer Absicht an das SC-IT (hilfe@servicecenter-khs.de). Dann
Tageslichtsimulator Easy Time Controll. Bedienungsanleitung
 Tageslichtsimulator Easy Time Controll Bedienungsanleitung Mit unserem frei programmierbaren Tageslichsimulator Easy Time Controll halten Sie nun ein Gerät in Händen, mit welchem Sie ihre Aquarium-/Terrarium
Tageslichtsimulator Easy Time Controll Bedienungsanleitung Mit unserem frei programmierbaren Tageslichsimulator Easy Time Controll halten Sie nun ein Gerät in Händen, mit welchem Sie ihre Aquarium-/Terrarium
Mediator 9 - Lernprogramm
 Mediator 9 - Lernprogramm Ein Lernprogramm mit Mediator erstellen Mediator 9 bietet viele Möglichkeiten, CBT-Module (Computer Based Training = Computerunterstütztes Lernen) zu erstellen, z. B. Drag & Drop
Mediator 9 - Lernprogramm Ein Lernprogramm mit Mediator erstellen Mediator 9 bietet viele Möglichkeiten, CBT-Module (Computer Based Training = Computerunterstütztes Lernen) zu erstellen, z. B. Drag & Drop
SP-1101W Schnellanleitung
 SP-1101W Schnellanleitung 06-2014 / v1.2 1 I. Produktinformationen... 3 I-1. Verpackungsinhalt... 3 I-2. Vorderseite... 3 I-3. LED-Status... 4 I-4. Schalterstatus-Taste... 4 I-5. Produkt-Aufkleber... 5
SP-1101W Schnellanleitung 06-2014 / v1.2 1 I. Produktinformationen... 3 I-1. Verpackungsinhalt... 3 I-2. Vorderseite... 3 I-3. LED-Status... 4 I-4. Schalterstatus-Taste... 4 I-5. Produkt-Aufkleber... 5
Fax einrichten auf Windows XP-PC
 Um ein PC Fax fähig zu machen braucht man einen sogenannten Telefon Anschluss A/B das heißt, Fax funktioniert im Normalfall nur mit Modem nicht mit DSL. Die meisten neueren PCs haben ein Modem integriert.
Um ein PC Fax fähig zu machen braucht man einen sogenannten Telefon Anschluss A/B das heißt, Fax funktioniert im Normalfall nur mit Modem nicht mit DSL. Die meisten neueren PCs haben ein Modem integriert.
Urlaubsregel in David
 Urlaubsregel in David Inhaltsverzeichnis KlickDown Beitrag von Tobit...3 Präambel...3 Benachrichtigung externer Absender...3 Erstellen oder Anpassen des Anworttextes...3 Erstellen oder Anpassen der Auto-Reply-Regel...5
Urlaubsregel in David Inhaltsverzeichnis KlickDown Beitrag von Tobit...3 Präambel...3 Benachrichtigung externer Absender...3 Erstellen oder Anpassen des Anworttextes...3 Erstellen oder Anpassen der Auto-Reply-Regel...5