Einleitung Definitionen FlexRay TTA Vergleich Fazit Literatur. Verteilte Echtzeit
|
|
|
- Claus Fleischer
- vor 7 Jahren
- Abrufe
Transkript
1 Hauptseminar: Automotive Software Engineering Betreuer: Christian Kühnel Technische Universität München Fakultät für Informatik 20. Januar 2004

2 Gliederung Einleitende Bemerkungen Definitionen FlexRay Einige Eigenschaften/Anforderungen/Ziele Uhrensynchronisation Time Triggered Architecture Allgemeines Dienste Vergleich Fehler Hypothese Flexibilität Fazit Literatur

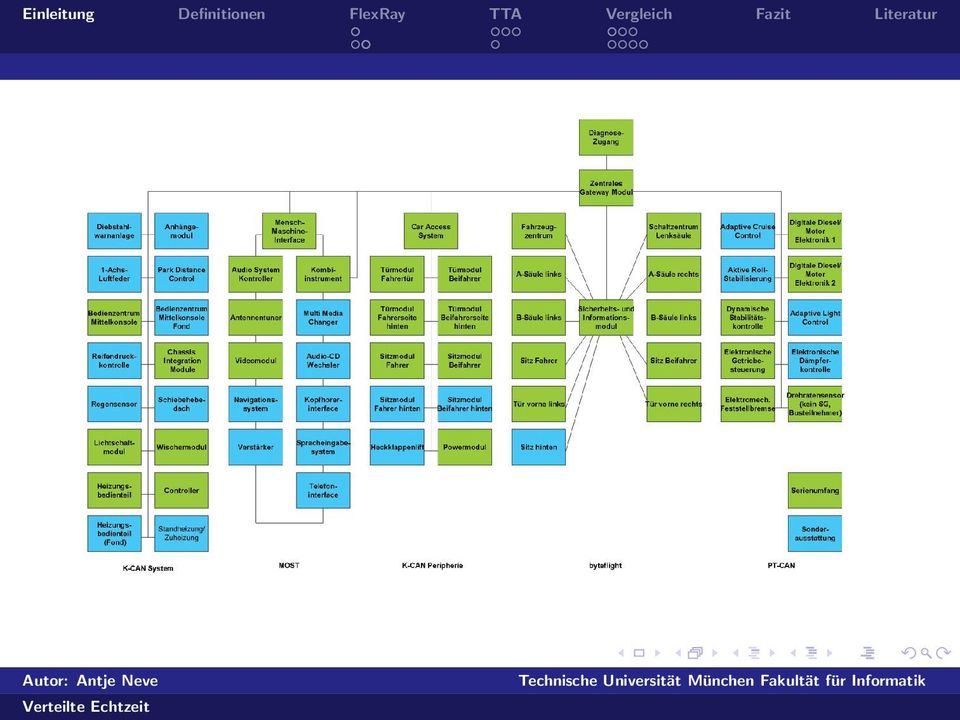
3 CAN - Bus seit 10 Jahren im Auto für Vernetzung von Steuergeräten MOST Bus für Anforderungen aus Telematikbereich Steigende Anzahl von Funktionen im Auto steigende Anzahl von Steuergeräten Beherrschbarkeit der Komplexität: System Fahrzeug muss partitioniert werden Verschiedene Kommunikationssysteme müssen verbunden werden.

4
5 Begriffe & Definitionen I Time-Triggered - Zeitgesteuert Beispiel: Time-Triggered Architecture Tätigkeiten rund um den Bus und den angeschlossenen Komponenten hängen vom Ablauf einer internen Uhr ab Bevorzugter Ansatz in sicherheitskritischen Systemen Statisch vorher festgelegte Vergabe von Bandbreite Keine Absender und Empfänger Information notwendig Verfügbare Bandbreite ist höher Fehlerquelle: Falscher Identifier nicht vorhanden Vorteilhafte Aspekte: Effizienz, Determinismus und Partitionierung Nachteil: Flexibilität

6 Begriffe & Definitionen II Event-Triggered -Ereignisgesteuert Reagiert auf Ereignisse außerhalb der Kontrolle des Systems Beispiele: CAN Bus, Byteflight, LonWorks Teil der Nachricht ist ein Identifier Nachteile: schlechtere Zeit-Berechenbarkeit, Latenz steigt mit Busbelastung Partitionierung Trennung von Anwendungen in verteilten Systemen Strategie gegen Fehlerverbreitung Vereinfacht Erstellung von fehlertoleranten Anwendungen Ermöglicht Aufteilung einer Anwendungen in kleinere Teile (kostengünstiger) Fördert Composability - Zusammensetzbarkeit Zusammensetzbarkeit und Partitionierung beeinflussen Berechenbarkeit von Ressourcen!
 Fördert Composability - Zusammensetzbarkeit Zusammensetzbarkeit und Partitionierung beeinflussen")
7 Einige Eigenschaften/Anforderungen/Ziele Einige Eigenschaften/Anforderungen/Ziele I FlexRay Konsortium 1999 von BMW, DaimlerChrysler, Motorola und Philips gegründet Weitere Mitglieder bis heute: Bosch, General Motors, Mazda, Elmos, Siemens VDO FlexRay: Modernes Kommunikationssystem für zuverlässige und echtzeitfähige Datenübertragung zwischen elektrischen und mechatronischen Elementen im Auto Datenrate: 10 MBit/s Unterstützung von Echtzeitsystemen Fehlertoleranz bei Synchronisation der globalen Uhr Fehlertoleranz im Kommunikationskanal

8 Einige Eigenschaften/Anforderungen/Ziele Einige Eigenschaften/Anforderungen/Ziele II Überwachungsmaßnahmen für einen geregelten Zugriff auf das Übertragungsmedium Unterstützung verschiedener Vernetzungs-Topologien Flexibilität und Skalierbarkeit bei der Konfiguration Unterstützung von verschiedenen Marken, Baureihen und Plattformen Erweiterbarkeit auch bezüglich zukünftiger Komponenten Vereinheitlichung der Bussysteme Unterstützung von Produktions- und Serviceabläufen (Teilnetzbetrieb) Kostenoptimierung

9 Uhrensynchronisation Uhrensynchronisation bei FlexRay Zwei Verfahren der Korrektur der lokalen Zeit auf dem Steuergerät: Offset - Korrektur und Steigungskorrektur Steigungskorrektur: Ermittelt unterschiedlichen Takte auf Steuergeräten und stellt Mittelwert der Taktgeschwindigkeiten ein Offsetkorrektur: Sorgt dafür, dass lokalen Uhren die gleiche Phase besitzen und Zyklus immer gleich beginnen Durch Steigungskorrektur ist Bandbreiteneffizienz höher

10 Uhrensynchronisation Uhrensynchronisation bei FlexRay - detailliert I Wie wird gemessen? Kommunikationszyklus wird in statisches und dynamisches Segment unterteilt Statisches Segment ist Basis für Zeitmessung: Knoten beginnt mit Senden (Messen) genau dann, wenn nach lokaler Uhr Sendezeitpunkt erreicht ist Empfangende Knoten vergleichen Ist-Zeit (lokale Uhr) mit Soll-Zeit (aus Schedule); geringer Fehler durch Laufzeit
 mit Soll-Zeit (aus Schedule); geringer")
11 Uhrensynchronisation Uhrensynchronisation bei FlexRay - detailliert II Ausgewählte Knoten messen so den Offset Für Steigungskorrektur muss zweimal gemessen werden Wert gibt an, um wieviel die Uhren der zwei Knoten sich je Zyklus voneinander entfernen

12 Uhrensynchronisation Uhrensynchronisation bei FlexRay - detailliert III Offset-Korrektur durch Welch-Lynch-Algorithmus: Ein Knoten bestimmt die Abweichungen zu den anderen Knoten im Netzwerk. Nach Wegwerfen des kleinsten und größten Wertes wird der Mittelwert bestimmt. gute Performanz und einfach zu implementieren Steigungskorrektur für Knotenfrequenzen: Differenz zwischen Steigungen der einzelnen Knotenfrequenzen bestimmen und Mittelwert bilden. Eigene Frequenz um diesen Mittelwert ändern Kombination beider Methoden bei FlexRay nach zwei Zyklen beginnen alle Knoten wieder zur gleichen Zeit

13 Uhrensynchronisation Uhrensynchronisation bei FlexRay - detailliert IV - Offset Korrektur - Steigungskorrektur - Kombination beider Methoden

14 Allgemeines Time Triggered Architecture Name zeitgesteuerter Ansatz Entwicklung der TTA an der Universität Wien unter Federführung von Hermann Kopetz (seit ca. 20 Jahren) Kommerzieller Betrieb über die Firma TTTech Datenrate: 25 MBit/s, (Labor: bis zu 1 GBit/s)
 Kommerzieller Betrieb über die Firma TTTech Datenrate:")
15 Allgemeines Time Triggered Architecture - Topologien 2 Topologien - TTA - Bus und TTA-Star

16 Allgemeines Time Triggered Architecture - Schnittstellen TTA implementiert drei Schnittstellen: Real-Time Service Stellt die Echtzeit-Dienste für den Knoten bereit Zeitkritisch Diagnostic Maintenance Wird zum Setzen von Parametern und für Fehlerdiagnose benutzt Nicht zeitkritisch Configuration Planning Wird benutzt um andere Knoten in das Netzwerk einzufügen Nicht zeitkritisch

17 Dienste TTA - Dienste Dienste erleichtern den Anwendungsentwicklern die Arbeit Uhrensynchronistation (Welch-Lynch-Algorithmus) membership service, d.h. Ausschließen defekter Knoten TTA benutzt Checksummen (ähnlich digitalen Signaturen) master-shadow Selbstkontroll-Mechanismus, der bei Fehler zu fail silence führt interactive consistency, d.h. alle Nachrichten, sind bei allen Empfängern identisch Zwei Bedingungen müssen erfüllt sein. Übereinstimmung: Alle fehlerfreien Empfänger erhalten diegleiche Nachricht (auch wenn Sender fehlerhaft ist) Validität: Wenn Sender fehlerfrei, dann erhalten Empfänger auch die Nachricht, die wirklich gesendet wurde

18 Fehler Hypothese Fehler Hypothese, Fehlerarten und Definitionen I Aspekte der Fehler Hypothese : Fehlerart (fault mode), Gesamtanszahl der Fehler und Ankunftsrate der Fehler Fehlerarten: Fehler durch räumliche Nähe/Annäherung ( spatial proximity ) hybrid fault model - Fehler ist: erkennbar, symmetrisch, zufällig (asymmetrisch/byzantinisch), SOS Fehler: slightly out of specification Aktiv: z.b. Prozessor Passiv: z.b. Bus Größere Redundanz notwendig für zufällige > symmetrische > erkennbare Fehler fail silence = fehlerhafte FCU schaltet sich ab

19 Fehler Hypothese Fehler Hypothese, Fehlerarten und Definitionen II Rekonfigurationsrate: Wie schnell kann sich eine Architektur von vergangenen Fehlern erholen und auf neue reagieren Fehlerankunftsrate: Angenommene Rate, mit der (verschiedene) Fehler auftauchen Wiedereinbuchen in das Netzwerk ( rejoin ): Ausgeschlossene FCU versucht wieder in das Netzwerk aufgenommen zu werden Never give up Strategie: Jeder Knoten greift auf lokale Kontrolle seiner Aktoren zurück und versucht Koordination mit anderen Knoten wiederzuerlangen

20 Fehler Hypothese TTA TTA Star: zufällige, aktive Fehler in den Controllern und im Hub spatial proximity faults, die Knoten o. Hub betreffen Ein-Fehler-Toleranz garantiert bei: 4 Controller und beide Hubs fehlerfrei TTA Bus: zufällige passive Fehler in den Guardians und Bussen Ein-Fehler-Toleranz garantiert bei: In jedem Knoten entweder der Controller o. Guardian fehlerhaft 4 Controller und Guardians fehlerfrei Fehlerankunftsrate: Höchstens ein Fehler in jeder zweiten Runde

21 Fehler Hypothese FlexRay Fehlerarten: Fehlertoleranz für asymmetrische und zufällige Fehler bei der Uhrensynchronisation Weniger als ein Drittel der Knoten darf für die Uhrensynchronisation fehlerhaft sein spatial proximity faults, die Knoten und den Hub betreffen können Anzahl der maximalen Fehler: Ein-Fehler-Toleranz garantiert bei: In jedem Knoten entweder der Guardian oder der Controller ist fehlerhaft Höchstens eine Zwischenverbindung fehlerhaft
22 Flexibilität Flexibilität Statischer Ablauf in einem zeitgesteuerten Bus eher unflexibel Maßnahmen zum Umschalten zwischen verschiedenen Abläufen (schedules) eingerichten Notwendig: Gegen unpassende Wechsel schützen Zeitgesteuerte Busse müssen die flexible Bereitstellung von Bandbreite bei ereignisgesteuerten Bussen abbilden
23 Flexibilität Flexibilität beim TTA TTA Abläufe werden berechnet und in MEDL geladen Flexibilität bei Anzahl und Länge der Nachrichten, die jeder Knoten verschicken darf Alle Knoten haben dieselbe MEDL Version nach dem Start Knoten kann Moduswechsel verlangen tritt entweder sofort ein oder kann von nachfolgend sendenden Knoten überschrieben werden Alle Modi basieren auf demselben Ablauf; nur Empfänger und Interpretation der Nachrichten kann sich verändern
24 Flexibilität Flexibilität beim TTA durch das TTP/A Bus Protokoll Anschluss von kostengünstigen einfachen Signalgebern (Sensoren) an TTA - Knoten TTA - Knoten ist Master des Signalgeber - Clusters Informationen zwischen TTA Knoten und Signalgeber wird über TTP/A Protokoll ausgetauscht. Master - Slave - Runde (MS): Konfiguriert bzw. wartet einen oder mehrere Signalgeber Multi - Partner - Runde (MP): Transportiert periodisch Daten ausgewählter Signalgeber MP und MS wechseln sich ab, so dass plug-and-play möglich ist
25 Flexibilität Flexibilität bei FlexRay Jeder Kommunikationszyklus wird in ein statisches (zeitgesteuertes) bzw. dynamisches (ereignisgesteuertes) Segment geteilt Während des ereignisgesteuerten Segments kommunizieren die Knoten über das Byteflight Protokoll Zur Anbindung von kostengünstigen Sensoren wird das LIN Protokoll benutzt Zeitgesteuerte Segment des Kommunikationszyklus wird in Zeitfenster aufgeteilt Jeder Buscontroller wird über die Anzahl der zugewiesenen Zeitfenster informiert Knoten, die mehr mehr Bandbreite benötigen, werden mehr Zeitfenster zugeteilt
26 Fazit TTA ist in Geschwindigkeit FlexRay überlegen FlexRay ist flexibler (Nachteil: masquerading ) Im Bereich der Dienste ist TTA ausgereifter Beide haben Potential sich durchzusetzen TTA: Ergebnis jahrelanger Forschung in Echtzeitsystemen FlexRay: Mächtiges Konsortium aus vielen Firmen Es gibt viel zu tun!
27 Literatur I Heinecke, Harald, Schedl, Anton, Berwanger, Josef, Peller, Martin, Nieten, Volker, Belschner, Ralf, Hedenetz, Bernd, Lohrmann, Peter, and Bracklo, Claas. FlexRay - ein Kommunikationssystem für das Automobil der Zukunft. Elektroniknet.de, Kopetz, Hermann and Bauer,Günther. The Time-Triggered Architecture. In Proceedings of the IEEE Special Issue on Modeling and Design of Embedded Software. IEEE, Oct 2002.
28 Literatur II Matthias Rausch. Optimierte Mechanismen und Algorithmen in FlexRay. Elektroniknet.de, John Rushby. A Comparison of Bus Architectures for Safety Critical Embedded Systems. Langley Reseach Center, NASA-2003-cr pdf.
Verteilte Echtzeit. Hauptseminar Automotive Software Engineering. Antje Neve. 28. Januar Betreuer: Christian Kühnel
 Technische Universität München Lehrstuhl IV: Software & Systems Engineering Hauptseminar Automotive Software Engineering Verteilte Echtzeit Antje Neve 28. Januar 2005 Betreuer: Christian Kühnel Kurzfassung
Technische Universität München Lehrstuhl IV: Software & Systems Engineering Hauptseminar Automotive Software Engineering Verteilte Echtzeit Antje Neve 28. Januar 2005 Betreuer: Christian Kühnel Kurzfassung
Zuverlässige Kommunikation mittels. Time-Triggered Protokolle
 Zuverlässige Kommunikation mittels des Time-Triggered Protokolls Im Rahmen des Seminars Analyse, Entwurf und Implementierung zuverlässiger Software André Francisco Andre.Francisco@MLaP.de Seite 1 Anwendungsbeispiel:
Zuverlässige Kommunikation mittels des Time-Triggered Protokolls Im Rahmen des Seminars Analyse, Entwurf und Implementierung zuverlässiger Software André Francisco Andre.Francisco@MLaP.de Seite 1 Anwendungsbeispiel:
FlexRay. Christian Horn. PG AutoLab Seminarwochenende Oktober AutoLab
 FlexRay Christian Horn interspy@gmx.de PG Seminarwochenende 21.-23. Oktober 2007 1 FlexRay Christian Horn 2 FlexRay, PG, Seminarwochenende 21.-23.10.2007 Überblick Motivation Das FlexRay
FlexRay Christian Horn interspy@gmx.de PG Seminarwochenende 21.-23. Oktober 2007 1 FlexRay Christian Horn 2 FlexRay, PG, Seminarwochenende 21.-23.10.2007 Überblick Motivation Das FlexRay
Entwicklung eines intelligenten FlexRay-Sternkopplers Paul Milbredt, AUDI AG, 11.05.2010, TU Darmstadt
 Entwicklung eines intelligenten FlexRay-Sternkopplers Paul Milbredt, AUDI AG, 11052010, TU Darmstadt Gliederung Elektronikentwicklung bei Audi Grundlagen Ethernet als Vergleich FlexRay Konzept eines intelligenten
Entwicklung eines intelligenten FlexRay-Sternkopplers Paul Milbredt, AUDI AG, 11052010, TU Darmstadt Gliederung Elektronikentwicklung bei Audi Grundlagen Ethernet als Vergleich FlexRay Konzept eines intelligenten
6.5 TTP (Time Triggered Protocol)
") 6.5 TTP (Time Triggered Protocol) TTP/C ist ein zeitgesteuertes Kommunikationsprotokoll, das speziell für den Einsatz in sicherheitskritischen Anwendungen, wie z.b. im Flugzeugbereich oder für X-by- Wire-Anwendungen
6.5 TTP (Time Triggered Protocol) TTP/C ist ein zeitgesteuertes Kommunikationsprotokoll, das speziell für den Einsatz in sicherheitskritischen Anwendungen, wie z.b. im Flugzeugbereich oder für X-by- Wire-Anwendungen
B U S S Y S T E M E IN KRAFTFAHRZEUGEN TECHNISCHE UNIVERSITÄT GRAZ
 B U S S Y S T E M E IN KRAFTFAHRZEUGEN TECHNISCHE UNIVERSITÄT GRAZ Institut für Elektronik Michael Hinterberger michael.hinterberger@tugraz.at WICHTIGE BUSSYSTEME IM KFZ CAN LIN FLEXRAY MOST weitere BUSSYSTEME
B U S S Y S T E M E IN KRAFTFAHRZEUGEN TECHNISCHE UNIVERSITÄT GRAZ Institut für Elektronik Michael Hinterberger michael.hinterberger@tugraz.at WICHTIGE BUSSYSTEME IM KFZ CAN LIN FLEXRAY MOST weitere BUSSYSTEME
Dresden, 20.12.2006. Markus Wintermann. Hauptseminar Technische Informationssystem FlexRay - Automobilbussystem der nächsten Generation
 Fakultät Informatik Institut für Angewandte Informatik, Professur für technische Informationssysteme Hauptseminar Technische Informationssystem FlexRay - Automobilbussystem der nächsten Generation Markus
Fakultät Informatik Institut für Angewandte Informatik, Professur für technische Informationssysteme Hauptseminar Technische Informationssystem FlexRay - Automobilbussystem der nächsten Generation Markus
6.6 FlexRay Einleitung Geschichte
 6.6 FlexRay 6.6.1 Einleitung Mit der zunehmenden Menge von Datenkommunikation zwischen den elektronischen Steuereinheit (ECUs) des Fahrzeugs, ist es wichtig eine hohe Datenrate zu erzielen. FlexRay lässt
6.6 FlexRay 6.6.1 Einleitung Mit der zunehmenden Menge von Datenkommunikation zwischen den elektronischen Steuereinheit (ECUs) des Fahrzeugs, ist es wichtig eine hohe Datenrate zu erzielen. FlexRay lässt
Fehlertoleranz in eingebetteten Systemen
 Fehlertoleranz in eingebetteten Systemen Ausgewählte Kapitel eingebetteter Systeme (AKES) 19.07.2006 1 / 36 Was ist ein Fehler? Fehlerklassen Überblick Einführung Was ist ein Fehler? Fehlerklassen 2 /
Fehlertoleranz in eingebetteten Systemen Ausgewählte Kapitel eingebetteter Systeme (AKES) 19.07.2006 1 / 36 Was ist ein Fehler? Fehlerklassen Überblick Einführung Was ist ein Fehler? Fehlerklassen 2 /
HW/SW Codesign für Real-time Ethernet basierte Steuergeräte
 HW/SW Codesign für Real-time Ethernet basierte Steuergeräte Master Projektvorstudie Für das Fach: Anwendungen 1 In der Arbeitsgruppe CoRE Communication over Real-time Ethernet Friedrich Groß Agenda Motivation
HW/SW Codesign für Real-time Ethernet basierte Steuergeräte Master Projektvorstudie Für das Fach: Anwendungen 1 In der Arbeitsgruppe CoRE Communication over Real-time Ethernet Friedrich Groß Agenda Motivation
Zeitgesteuerte Kommunikationssysteme für Hard-Real-Time Anwendungen. Jörn Sellentin
 Zeitgesteuerte Kommunikationssysteme für Hard-Real-Time Anwendungen Jörn Sellentin Agenda Anforderungen an die Kommunikation in Fahrzeugen Verlässliche Kommunikation (Dependability) Fehlertoleranz (Fault
Zeitgesteuerte Kommunikationssysteme für Hard-Real-Time Anwendungen Jörn Sellentin Agenda Anforderungen an die Kommunikation in Fahrzeugen Verlässliche Kommunikation (Dependability) Fehlertoleranz (Fault
Ausgewählte Kapitel eingebetteter Systeme TTP und FlexRay
 Ausgewählte Kapitel eingebetteter Systeme TTP und FlexRay Richard Membarth 14.06.2006 Inhaltsverzeichnis 1 Einleitung 3 1.1 Allgemein.................................... 3 1.2 Geschichte....................................
Ausgewählte Kapitel eingebetteter Systeme TTP und FlexRay Richard Membarth 14.06.2006 Inhaltsverzeichnis 1 Einleitung 3 1.1 Allgemein.................................... 3 1.2 Geschichte....................................
Evaluation von Backbonesystemen im Automobil
 Evaluation von Backbonesystemen im HAW Hamburg 15. Dezember 2011 Agenda Evaluation von intelligenten Einführung Motivation Problematik Ziele Hintergrund Backbonetechnologien Netzwerktopologien 15.12.11
Evaluation von Backbonesystemen im HAW Hamburg 15. Dezember 2011 Agenda Evaluation von intelligenten Einführung Motivation Problematik Ziele Hintergrund Backbonetechnologien Netzwerktopologien 15.12.11
On-Board Fahrzeugdiagnose
 1 Übersicht 1.Einführung 2.Bussysteme 3.OBD II 4.Zusammenfassung 2 Einführung Haupteinsatzbereiche elektronischer Systeme in Fahrzeugen: Motorsteuerung (Zündung,Einspritzung,...) Steuerung des Fahrverhaltens
1 Übersicht 1.Einführung 2.Bussysteme 3.OBD II 4.Zusammenfassung 2 Einführung Haupteinsatzbereiche elektronischer Systeme in Fahrzeugen: Motorsteuerung (Zündung,Einspritzung,...) Steuerung des Fahrverhaltens
IT ins Auto! IP, Ethernet, USB und Co auf dem Weg ins Kraftfahrzeug. Stefanie Gahrig. 2. Juli Proseminar Technische Informationssysteme
 IT ins Auto! IP, Ethernet, USB und Co auf dem Weg ins Kraftfahrzeug 2. Juli 2009 Proseminar Technische Informationssysteme IT ins Auto! 1 Gliederung Einleitung Allgemeine Trends Aktuelle Standards Ethernet
IT ins Auto! IP, Ethernet, USB und Co auf dem Weg ins Kraftfahrzeug 2. Juli 2009 Proseminar Technische Informationssysteme IT ins Auto! 1 Gliederung Einleitung Allgemeine Trends Aktuelle Standards Ethernet
Kommunikationssysteme: FlexRay
 Vorlesung Echtzeitsysteme Wintersemester 2009 Kommunikationssysteme: FlexRay 26.01.2010 Karl Leiß Echtzeitsysteme: Kommunikation - FlexRay Übersicht Agenda: Einleitung Anwendungsbereich Systemkomponenten
Vorlesung Echtzeitsysteme Wintersemester 2009 Kommunikationssysteme: FlexRay 26.01.2010 Karl Leiß Echtzeitsysteme: Kommunikation - FlexRay Übersicht Agenda: Einleitung Anwendungsbereich Systemkomponenten
HW/SW Codesign für Real-time Ethernet basierte Steuergeräte
 HW/SW Codesign für Real-time Ethernet basierte Steuergeräte Masterseminar In der Arbeitsgruppe CoRE Communication over Real-time Ethernet Friedrich Groß Agenda Einführung Grundlagen Idee der Masterarbeit
HW/SW Codesign für Real-time Ethernet basierte Steuergeräte Masterseminar In der Arbeitsgruppe CoRE Communication over Real-time Ethernet Friedrich Groß Agenda Einführung Grundlagen Idee der Masterarbeit
FlexRay und AUTOSAR. Stephan Reichelt, Dr. Karsten Schmidt, Frank Gesele, Nils Seidler, Prof. Dr. Wolfram Hardt
 FlexRay und AUTOSAR Stephan Reichelt, Dr. Karsten Schmidt, Frank Gesele, Nils Seidler, Prof. Dr. Wolfram Hardt 1 FlexRay und AUTOSAR Inhalt Herausforderungen Systemkomplexität Vernetzungskomplexität Fazit
FlexRay und AUTOSAR Stephan Reichelt, Dr. Karsten Schmidt, Frank Gesele, Nils Seidler, Prof. Dr. Wolfram Hardt 1 FlexRay und AUTOSAR Inhalt Herausforderungen Systemkomplexität Vernetzungskomplexität Fazit
Kommunikations- mechanismen
 Kommunikations- mechanismen T. Streichert (streichert@cs.fau.de) Hardware-Software-Co-Design Friedrich-Alexander-Universität Erlangen-Nürnberg 1 Gliederung Einleitung Protokolle Kommunikationsmedium Netztopologie
Kommunikations- mechanismen T. Streichert (streichert@cs.fau.de) Hardware-Software-Co-Design Friedrich-Alexander-Universität Erlangen-Nürnberg 1 Gliederung Einleitung Protokolle Kommunikationsmedium Netztopologie
Experimentelle Bewertung der Synchronisationsgenauigkeit von IEEE 802.1AS für variierende Temperaturbedingungen
 Experimentelle Bewertung der Synchronisationsgenauigkeit von IEEE 802.1AS für variierende Temperaturbedingungen Andreas Kern (Daimler AG) Helge Zinner (Continental Automotive GmbH) Thilo Streichert (Daimler
Experimentelle Bewertung der Synchronisationsgenauigkeit von IEEE 802.1AS für variierende Temperaturbedingungen Andreas Kern (Daimler AG) Helge Zinner (Continental Automotive GmbH) Thilo Streichert (Daimler
Seminarwochenende Oktober 2007 AutoLab
 CAN Sebastian Kosch sebastian.kosch@googlemail.com PG Seminarwochenende 21. 23. Oktober 2007 1 Überblick Der CAN Bus Das CAN Protokoll CAN Hardware CAN Software Zusammenfassung Fragen Sebastian Kosch
CAN Sebastian Kosch sebastian.kosch@googlemail.com PG Seminarwochenende 21. 23. Oktober 2007 1 Überblick Der CAN Bus Das CAN Protokoll CAN Hardware CAN Software Zusammenfassung Fragen Sebastian Kosch
FlexRay Grundlagen, Funktionsweise, Anwendung
 Mathias Rausch FlexRay Grundlagen, Funktionsweise, Anwendung ISBN-10: 3-446-41249-2 ISBN-13: 978-3-446-41249-1 Weitere Informationen oder Bestellungen unter http://www.hanser.de/978-3-446-41249-1 sowie
Mathias Rausch FlexRay Grundlagen, Funktionsweise, Anwendung ISBN-10: 3-446-41249-2 ISBN-13: 978-3-446-41249-1 Weitere Informationen oder Bestellungen unter http://www.hanser.de/978-3-446-41249-1 sowie
B U S S Y S T E M E IN KRAFTFAHRZEUGEN
 B U S S Y S T E M E IN KRAFTFAHRZEUGEN TECHNISCHE UNIVERSITÄT GRAZ Institut für Elektronik Michael Hinterberger michael.hinterberger@tugraz.at WICHTIGE BUSSYSTEME IM KFZ CAN LIN FLEXRAY MOST weitere BUSSYSTEME
B U S S Y S T E M E IN KRAFTFAHRZEUGEN TECHNISCHE UNIVERSITÄT GRAZ Institut für Elektronik Michael Hinterberger michael.hinterberger@tugraz.at WICHTIGE BUSSYSTEME IM KFZ CAN LIN FLEXRAY MOST weitere BUSSYSTEME
MAC-Layer-Protokolle. Your Name Your Title. Hauptseminar Kommunikation in drahtlosen Sensornetzen
 MAC-Layer-Protokolle Hauptseminar Kommunikation in drahtlosen Sensornetzen 2005-12-31 Your Name Your Title Christian Fehler Your Organization (Line #1) Your Organization (Line #2) Übersicht Einleitung
MAC-Layer-Protokolle Hauptseminar Kommunikation in drahtlosen Sensornetzen 2005-12-31 Your Name Your Title Christian Fehler Your Organization (Line #1) Your Organization (Line #2) Übersicht Einleitung
CAN - BUS. Inhaltsverzeichnis
 Inhaltsverzeichnis Überblick CAN Übersicht Bussysteme ISO / OSI Schichtenmodell Physical Layer (Hardwareschicht) Data Layer (Softwareschicht) Application Layer (Anwendungsschicht) Anwendungsgebiete Literaturverzeichnis
Inhaltsverzeichnis Überblick CAN Übersicht Bussysteme ISO / OSI Schichtenmodell Physical Layer (Hardwareschicht) Data Layer (Softwareschicht) Application Layer (Anwendungsschicht) Anwendungsgebiete Literaturverzeichnis
J. Reinier van Kampenhout Robert Hilbrich Hans-Joachim Goltz. Workshop Echtzeit Fraunhofer FIRST
 Modellbasierte Generierung von statischen Schedules für sicherheitskritische, eingebettete Systeme mit Multicore Prozessoren und harten Echtzeitanforderungen J. Reinier van Kampenhout Robert Hilbrich Hans-Joachim
Modellbasierte Generierung von statischen Schedules für sicherheitskritische, eingebettete Systeme mit Multicore Prozessoren und harten Echtzeitanforderungen J. Reinier van Kampenhout Robert Hilbrich Hans-Joachim
Grundlagen des Software Engineering für Automotive Systems. Hauptseminar im WS 2012 / 2013
 Grundlagen des Software Engineering für Automotive Systems Hauptseminar im WS 2012 / 2013 Automotive Software Engineering Heutzutage werden Innovationen im Automobil überwiegend in Software realisiert.
Grundlagen des Software Engineering für Automotive Systems Hauptseminar im WS 2012 / 2013 Automotive Software Engineering Heutzutage werden Innovationen im Automobil überwiegend in Software realisiert.
Fehlertolerante Uhrensynchronisation
 Fehlertolerante Uhrensynchronisation Jens Chr. Lisner lisner@informatik.uni-essen.de Institut für Informatik / Universität Essen Institut für Informatik / Universität Essen p.1/23 Übersicht Algorithmus
Fehlertolerante Uhrensynchronisation Jens Chr. Lisner lisner@informatik.uni-essen.de Institut für Informatik / Universität Essen Institut für Informatik / Universität Essen p.1/23 Übersicht Algorithmus
Algorithmus von Berkeley (1989)
") Annahme: kein UTC Empfänger verfügbar Algorithmus (zentral, intern): Algorithmus von Berkeley (1989) ein Rechneragiert als aktiver Time Server. Der Server fragt periodisch die Zeiten/Unterschiede aller
Annahme: kein UTC Empfänger verfügbar Algorithmus (zentral, intern): Algorithmus von Berkeley (1989) ein Rechneragiert als aktiver Time Server. Der Server fragt periodisch die Zeiten/Unterschiede aller
HW/SW Codesign für Real-time Ethernet basierte Steuergeräte
 HW/SW Codesign für Real-time Ethernet basierte Steuergeräte Related Work Für das Fach: Anwendungen 2 In der Arbeitsgruppe CoRE Communication over Real-time Ethernet Friedrich Groß Agenda Einführung Rückblick
HW/SW Codesign für Real-time Ethernet basierte Steuergeräte Related Work Für das Fach: Anwendungen 2 In der Arbeitsgruppe CoRE Communication over Real-time Ethernet Friedrich Groß Agenda Einführung Rückblick
Beispielarchitekturen I. Dipl.-Inf. J. Richling Wintersemester 2003/2004
 Beispielarchitekturen I Dipl.-Inf. J. Richling Wintersemester 2003/2004 Warum Systemarchitekturen? Ein Echtzeitsystem ist mehr als die Zusammenhäufung seiner Bestandteile Hardware Betriebssystem Anwendungssoftware
Beispielarchitekturen I Dipl.-Inf. J. Richling Wintersemester 2003/2004 Warum Systemarchitekturen? Ein Echtzeitsystem ist mehr als die Zusammenhäufung seiner Bestandteile Hardware Betriebssystem Anwendungssoftware
Sensortechnik/Applikation
 Sensortechnik/Applikation Prof. Dr. H. Gebhard FH Dortmund 10. Juni 2010 Prof. Dr. H. Gebhard (FH Dortmund) Sensortechnik/Applikation 10. Juni 2010 1 / 16 Inhaltsübersicht 1-Wire Prof. Dr. H. Gebhard (FH
Sensortechnik/Applikation Prof. Dr. H. Gebhard FH Dortmund 10. Juni 2010 Prof. Dr. H. Gebhard (FH Dortmund) Sensortechnik/Applikation 10. Juni 2010 1 / 16 Inhaltsübersicht 1-Wire Prof. Dr. H. Gebhard (FH
Praktische Übungen im Labor Automatisierungstechnik
 Universität Stuttgart Institut für Automatisierungstechnik und Softwaresysteme Prof. Dr.-Ing. M. Weyrich Praktische Übungen im Labor Automatisierungstechnik Versuch Nr. 6 Einführung in das Bussystem FlexRay
Universität Stuttgart Institut für Automatisierungstechnik und Softwaresysteme Prof. Dr.-Ing. M. Weyrich Praktische Übungen im Labor Automatisierungstechnik Versuch Nr. 6 Einführung in das Bussystem FlexRay
Ethernet als Bus für Echtzeitanwendungen im Automobil:
 Ethernet als Bus für Echtzeitanwendungen im Automobil: Konzepte aus der Automatisierungsbranche Hochschule für Angewandte Wissenschaften Hamburg Anwendungen 1 WS 08/09 16. Dezember 2008 Wie alles began
Ethernet als Bus für Echtzeitanwendungen im Automobil: Konzepte aus der Automatisierungsbranche Hochschule für Angewandte Wissenschaften Hamburg Anwendungen 1 WS 08/09 16. Dezember 2008 Wie alles began
Aktuelle RTOS-Entwicklungen aus der Forschung
 Aktuelle RTOS-Entwicklungen aus der Forschung Lennart Downar Seminar Fehlertoleranz und Echtzeit 16. Februar 2016 Aktuelle RTOS-Entwicklungen aus der Forschung Lennart Downar 1/28 Übersicht 1 Einführung
Aktuelle RTOS-Entwicklungen aus der Forschung Lennart Downar Seminar Fehlertoleranz und Echtzeit 16. Februar 2016 Aktuelle RTOS-Entwicklungen aus der Forschung Lennart Downar 1/28 Übersicht 1 Einführung
FlexRay Grundlagen, Funktionsweise, Anwendung
 Mathias Rausch FlexRay Grundlagen, Funktionsweise, Anwendung ISBN-10: 3-446-41249-2 ISBN-13: 978-3-446-41249-1 Leseprobe Weitere Informationen oder Bestellungen unter http://www.hanser.de/978-3-446-41249-1
Mathias Rausch FlexRay Grundlagen, Funktionsweise, Anwendung ISBN-10: 3-446-41249-2 ISBN-13: 978-3-446-41249-1 Leseprobe Weitere Informationen oder Bestellungen unter http://www.hanser.de/978-3-446-41249-1
Seminar. PG AutoLab. Verteilte Echtzeitsysteme. Sabrina Hecke. PG 522 Fachbereich Informatik Technische Universität Dortmund Lehrstuhl XII
 PG AutoLab Seminar Verteilte Echtzeitsysteme Sabrina Hecke PG 522 Fachbereich Informatik Technische Universität Dortmund Lehrstuhl XII 21. bis 23. Oktober 2007 Inhaltsverzeichnis 1 Was sind Echtzeitsysteme?
PG AutoLab Seminar Verteilte Echtzeitsysteme Sabrina Hecke PG 522 Fachbereich Informatik Technische Universität Dortmund Lehrstuhl XII 21. bis 23. Oktober 2007 Inhaltsverzeichnis 1 Was sind Echtzeitsysteme?
HOMEPLANE. Home Media Platform and Networks
 HOMEPLANE Home Media Platform and Networks Middleware und Systemarchitektur René Hülswitt European Microsoft Innovation Center, Aachen Home Media Platform and Networks Systemstruktur Aufteilung in zwei
HOMEPLANE Home Media Platform and Networks Middleware und Systemarchitektur René Hülswitt European Microsoft Innovation Center, Aachen Home Media Platform and Networks Systemstruktur Aufteilung in zwei
Network Coding in P2P live streaming
 Network Coding in P2P live von Niklas Goby Einleitung (1) Anforderungen an ein Live Stream Protokoll Flüssige Wiedergabe Skalierbarkeit Auf Peer Dynamiken reagieren Möglichst geringe Wiedergabeverzögerung
Network Coding in P2P live von Niklas Goby Einleitung (1) Anforderungen an ein Live Stream Protokoll Flüssige Wiedergabe Skalierbarkeit Auf Peer Dynamiken reagieren Möglichst geringe Wiedergabeverzögerung
EMES: Eigenschaften mobiler und eingebetteter Systeme. Dr. Siegmar Sommer, Dr. Peter Tröger Wintersemester 2009/2010
 EMES: Eigenschaften mobiler und eingebetteter Systeme 00101111010010011101001010101 Feldbusse Dr. Siegmar Sommer, Dr. Peter Tröger Wintersemester 2009/2010 00101111010010011101001010101 Überblick Architektur
EMES: Eigenschaften mobiler und eingebetteter Systeme 00101111010010011101001010101 Feldbusse Dr. Siegmar Sommer, Dr. Peter Tröger Wintersemester 2009/2010 00101111010010011101001010101 Überblick Architektur
MIT DEM BUS IM REBREATHER
 MIT DEM BUS IM REBREATHER BUSSYSTEME IN DER REBREATHERTECHNOLOGIE FALKO HÖLTZER Voll geschlossene elektronisch gesteuerte Rebreather mit Bussystem 2 INHALT WARUM GIBT ES BUSSYSTEME? WAS IST DER BUS? I
MIT DEM BUS IM REBREATHER BUSSYSTEME IN DER REBREATHERTECHNOLOGIE FALKO HÖLTZER Voll geschlossene elektronisch gesteuerte Rebreather mit Bussystem 2 INHALT WARUM GIBT ES BUSSYSTEME? WAS IST DER BUS? I
Evaluation von Backbonesystemen im Automobil Related Work
 Evaluation von Backbonesystemen im Related Work HAW Hamburg 21. Juni 2012 Agenda Einführung Time-Triggered Ethernet Rückblick AW1 Fragestellung in AW 2 Verwandte Ethernetbasierte Simulation Worst-Case
Evaluation von Backbonesystemen im Related Work HAW Hamburg 21. Juni 2012 Agenda Einführung Time-Triggered Ethernet Rückblick AW1 Fragestellung in AW 2 Verwandte Ethernetbasierte Simulation Worst-Case
Prinzipen und Komponenten Eingebetteter Systeme (PKES) Sebastian Zug Arbeitsgruppe Eingebettete Systeme und Betriebssysteme
 Sebastian Zug Arbeitsgruppe Eingebettete Systeme und Betriebssysteme") 1 Vorlesung Prinzipen und Komponenten Eingebetteter Systeme (PKES) (2) Was ist ein eingebettetes Gerät? Sebastian Zug Arbeitsgruppe Eingebettete Systeme und Betriebssysteme 2 Veranstaltungslandkarte Fehlertoleranz,
1 Vorlesung Prinzipen und Komponenten Eingebetteter Systeme (PKES) (2) Was ist ein eingebettetes Gerät? Sebastian Zug Arbeitsgruppe Eingebettete Systeme und Betriebssysteme 2 Veranstaltungslandkarte Fehlertoleranz,
Das Bussystem. Leistungsmerkmale und Anwendungen. www.tzm.de. Prof. Dr.-Ing. Osterwinter, Geschäftsleitung Daniel Hotzy, Bereichsleitung FlexRay
 Das Bussystem Leistungsmerkmale und Anwendungen Prof. Dr.-Ing. Osterwinter, Geschäftsleitung Daniel Hotzy, Bereichsleitung FlexRay Robert-Bosch-Str. 6 Fon: +49 (7161) 50 23 0 www.tzm.de TZ Mikroelektronik
Das Bussystem Leistungsmerkmale und Anwendungen Prof. Dr.-Ing. Osterwinter, Geschäftsleitung Daniel Hotzy, Bereichsleitung FlexRay Robert-Bosch-Str. 6 Fon: +49 (7161) 50 23 0 www.tzm.de TZ Mikroelektronik
Echtzeitprogrammierung und Echtzeitverhalten von Keil RTX. Frank Erdrich Semester AI 7
 Echtzeitprogrammierung und Echtzeitverhalten von Frank Erdrich Semester AI 7 Inhalt Einleitung Echtzeit und Echtzeitsysteme Echtzeitprogrammierung Real-Time Operating System Keil RTOS RTX Zusammenfassung
Echtzeitprogrammierung und Echtzeitverhalten von Frank Erdrich Semester AI 7 Inhalt Einleitung Echtzeit und Echtzeitsysteme Echtzeitprogrammierung Real-Time Operating System Keil RTOS RTX Zusammenfassung
HW/SW CODESIGN. Echtzeitverhalten. Mehmet Ozgan 0526530. 17. November 2015
 HW/SW CODESIGN Echtzeitverhalten 17. November 2015 Mehmet Ozgan 0526530 ÜBERBLICK 1. Echtzeitsysteme 2. Hardware im Zeitbereich 3. Software im Zeitbereich 2 ECHTZEITSYSTEME REAL-TIME SYSTEM Ein Echtzeitsystem
HW/SW CODESIGN Echtzeitverhalten 17. November 2015 Mehmet Ozgan 0526530 ÜBERBLICK 1. Echtzeitsysteme 2. Hardware im Zeitbereich 3. Software im Zeitbereich 2 ECHTZEITSYSTEME REAL-TIME SYSTEM Ein Echtzeitsystem
Designmigrationsstrategien von FlexRay zu TTEthernet
 Designmigrationsstrategien von FlexRay zu TTEthernet Hermand Dieumo Kenfack hermand.dieumo@informatik.haw-hamburg.de Hochschule für Angewandte Wissenschaften Hamburg Masterseminar WS 2010/2011 Agenda Einführung
Designmigrationsstrategien von FlexRay zu TTEthernet Hermand Dieumo Kenfack hermand.dieumo@informatik.haw-hamburg.de Hochschule für Angewandte Wissenschaften Hamburg Masterseminar WS 2010/2011 Agenda Einführung
Designmigrationsstrategien von FlexRay nach Time-Triggered Ethernet
 Designmigrationsstrategien von FlexRay nach Time-Triggered Ethernet Hermand Dieumo Kenfack Department Informatik Hochschule für Angewandte Wissenschaften Hamburg 26. April 2012 H. Dieumo (Inf. HAW Hamburg)
Designmigrationsstrategien von FlexRay nach Time-Triggered Ethernet Hermand Dieumo Kenfack Department Informatik Hochschule für Angewandte Wissenschaften Hamburg 26. April 2012 H. Dieumo (Inf. HAW Hamburg)
Masterarbeit. Hermand Dieumo Kenfack. Designmigrationsstrategien von FlexRay nach Time-Triggered Ethernet
 Masterarbeit Hermand Dieumo Kenfack Designmigrationsstrategien von FlexRay nach Time-Triggered Ethernet Fakultät Technik und Informatik Studiendepartment Informatik Faculty of Engineering and Computer
Masterarbeit Hermand Dieumo Kenfack Designmigrationsstrategien von FlexRay nach Time-Triggered Ethernet Fakultät Technik und Informatik Studiendepartment Informatik Faculty of Engineering and Computer
Simulation von Time-Triggered Ethernet im Automobilkontext mit OMNeT++ : Einführung
 Simulation von Time-Triggered Ethernet im Automobilkontext mit OMNeT++ : Einführung Hermand Dieumo Kenfack Hochschule für Angewandte Wissenschaften Hamburg Anwendungen 1 WS 09/10 Betreuer: Prof. Dr. Thomas
Simulation von Time-Triggered Ethernet im Automobilkontext mit OMNeT++ : Einführung Hermand Dieumo Kenfack Hochschule für Angewandte Wissenschaften Hamburg Anwendungen 1 WS 09/10 Betreuer: Prof. Dr. Thomas
Car on a Chip: Neue Steuergeräte-Architekturen mit Systems-on-Chip im Automobilbereich.
 CoaCh Car on a Chip: Neue Steuergeräte-Architekturen mit Systems-on-Chip im Automobilbereich Olaf Spinczyk Horst Schirmeier Jochen Streicher Michael Engel Lehrstuhl XII AG Eingebettete Systemsoftware http://ess.cs.uni-dortmund.de/de/teaching/pgs/coach/
CoaCh Car on a Chip: Neue Steuergeräte-Architekturen mit Systems-on-Chip im Automobilbereich Olaf Spinczyk Horst Schirmeier Jochen Streicher Michael Engel Lehrstuhl XII AG Eingebettete Systemsoftware http://ess.cs.uni-dortmund.de/de/teaching/pgs/coach/
Media Oriented Systems Transport Die MOST-Systembus Architektur
 Fakultät Informatik - Institute für Technische Informatik - VLSI-Entwurfssysteme, Diagnostik und Architekur Die MOST-Systembus Architektur Christian Greth s7277485@mail.inf.tu-dresden.de Dresden, 17. Juni
Fakultät Informatik - Institute für Technische Informatik - VLSI-Entwurfssysteme, Diagnostik und Architekur Die MOST-Systembus Architektur Christian Greth s7277485@mail.inf.tu-dresden.de Dresden, 17. Juni
Restbussimulation von Time-Triggered Ethernet
 Restbussimulation von Time-Triggered Ethernet Anwendungen 2 : florian.bartols@informatik.haw-hamburg.de 04. Mai 2011 2 / 30 Steigender Bedarf im Automobil Elektronischen Komponenten Bandbreite im Bordnetzwerk
Restbussimulation von Time-Triggered Ethernet Anwendungen 2 : florian.bartols@informatik.haw-hamburg.de 04. Mai 2011 2 / 30 Steigender Bedarf im Automobil Elektronischen Komponenten Bandbreite im Bordnetzwerk
Mehrprozessorarchitekturen
 Mehrprozessorarchitekturen (SMP, UMA/NUMA, Cluster) Arian Bär 12.07.2004 12.07.2004 Arian Bär 1 Gliederung 1. Einleitung 2. Symmetrische Multiprozessoren (SMP) Allgemeines Architektur 3. Speicherarchitekturen
Mehrprozessorarchitekturen (SMP, UMA/NUMA, Cluster) Arian Bär 12.07.2004 12.07.2004 Arian Bär 1 Gliederung 1. Einleitung 2. Symmetrische Multiprozessoren (SMP) Allgemeines Architektur 3. Speicherarchitekturen
CAN. Sebastian Kosch. sebastian.kosch@googlemail.com. PG AutoLab Seminarwochenende 21.-23. Oktober 2007. AutoLab
 CAN Sebastian Kosch sebastian.kosch@googlemail.com PG AutoLab Seminarwochenende 21.-23. Oktober 2007 AutoLab 1 Inhaltsverzeichnis Der CAN-Bus... 3 Der CAN-Bus im Auto... 3 Das Prinzip des Datenaustausches...5
CAN Sebastian Kosch sebastian.kosch@googlemail.com PG AutoLab Seminarwochenende 21.-23. Oktober 2007 AutoLab 1 Inhaltsverzeichnis Der CAN-Bus... 3 Der CAN-Bus im Auto... 3 Das Prinzip des Datenaustausches...5
Transfer von Prozessen des Software-Produktlinien Engineering in die Elektrik/Elektronik- Architekturentwicklung von Fahrzeugen
 Transfer von Prozessen des Software-Produktlinien Engineering in die Elektrik/Elektronik- entwicklung von Fahrzeugen Martin Jaensch, Dr. Bernd Hedenetz, Markus Conrath Daimler AG Prof. Dr. Klaus D. Müller-Glaser
Transfer von Prozessen des Software-Produktlinien Engineering in die Elektrik/Elektronik- entwicklung von Fahrzeugen Martin Jaensch, Dr. Bernd Hedenetz, Markus Conrath Daimler AG Prof. Dr. Klaus D. Müller-Glaser
Busarchitektur beim VDM
 Vortrag zur PEARL 2003 Boppard, den 27.11.2003 Realisierung einer zeitgesteuerten, verteilten Regelung mit einem CAN-TTCAN-Gateway A. Albert*, R. Strasser** * Robert Bosch GmbH, Schwieberdingen ** Institut
Vortrag zur PEARL 2003 Boppard, den 27.11.2003 Realisierung einer zeitgesteuerten, verteilten Regelung mit einem CAN-TTCAN-Gateway A. Albert*, R. Strasser** * Robert Bosch GmbH, Schwieberdingen ** Institut
Effiziente Ankopplung eines zeitgesteuerten Feldbusses an ein Echtzeitbetriebssystem
 Effiziente Ankopplung eines zeitgesteuerten Feldbusses an ein Echtzeitbetriebssystem Björn Pietsch Universität Hannover Amos Albert Robert Bosch GmbH 1 Gliederung Zeitgesteuerte Bussysteme Bisherige Lösungen
Effiziente Ankopplung eines zeitgesteuerten Feldbusses an ein Echtzeitbetriebssystem Björn Pietsch Universität Hannover Amos Albert Robert Bosch GmbH 1 Gliederung Zeitgesteuerte Bussysteme Bisherige Lösungen
TU Dortmund Fakultät Informatik
 TU Dortmund Fakultät Informatik Ausarbeitung zum Seminarthema FlexRay im Rahmen des Seminarteils der Projektgruppe AutoLab Christian Horn (111100) Betreuer: Prof. Dr.-Ing. Olaf Spinczyk Horst Schirmeier
TU Dortmund Fakultät Informatik Ausarbeitung zum Seminarthema FlexRay im Rahmen des Seminarteils der Projektgruppe AutoLab Christian Horn (111100) Betreuer: Prof. Dr.-Ing. Olaf Spinczyk Horst Schirmeier
FlexRay. Eine Übersicht über die neue Datenbus-Generation für den Automobil-Bereich. HTI Burgdorf Fachbereich Elektro- und Kommunikationstechnik
 FlexRay Eine Übersicht über die neue Datenbus-Generation für den Automobil-Bereich HTI Burgdorf Fachbereich Elektro- und Kommunikationstechnik Projektarbeit Embedded Control Burgdorf, Januar 2006 Dozent:
FlexRay Eine Übersicht über die neue Datenbus-Generation für den Automobil-Bereich HTI Burgdorf Fachbereich Elektro- und Kommunikationstechnik Projektarbeit Embedded Control Burgdorf, Januar 2006 Dozent:
Programmierung mit NQC: Kommunikation zwischen zwei RCX
 Programmierung mit NQC: Kommunikation zwischen zwei RCX Martin Schmidt Master-Slave-Betrieb mit 2 RCX Systeme mit 2 RCX sind leichter zu handhaben, wenn ein RCX die Kontrolle über alles behält ( Master
Programmierung mit NQC: Kommunikation zwischen zwei RCX Martin Schmidt Master-Slave-Betrieb mit 2 RCX Systeme mit 2 RCX sind leichter zu handhaben, wenn ein RCX die Kontrolle über alles behält ( Master
Grundlagen: Überblick
 Grundlagen: Überblick Verteilte Systeme Definition Grundbegriffe Kommunikation Klassifikation von Fehlern Begriffe Fehlerarten Analyse von Algorithmen Korrektheit Komplexität Verteilte Algorithmen (VA),
Grundlagen: Überblick Verteilte Systeme Definition Grundbegriffe Kommunikation Klassifikation von Fehlern Begriffe Fehlerarten Analyse von Algorithmen Korrektheit Komplexität Verteilte Algorithmen (VA),
Technikerprüfung 2012. Automatisierungstechnik. Zeit : 150 Minuten
 Fachschule für Elektrotechnik, Maschinenbautechnik und Metallbautechnik der Landeshauptstadt München Klasse : Name : MUSTER Technikerprüfung 2012 Automatisierungstechnik Zeit : 150 Minuten Punkte: Note
Fachschule für Elektrotechnik, Maschinenbautechnik und Metallbautechnik der Landeshauptstadt München Klasse : Name : MUSTER Technikerprüfung 2012 Automatisierungstechnik Zeit : 150 Minuten Punkte: Note
One way Delay (OWD) Determination Techniques
 Determination Techniques") Lehrstuhl Netzarchitekturen und Netzdienste Institut für Informatik Technische Universität München One way Delay (OWD) Determination Techniques Referent: Mislav Boras Betreuer: Dirk Haage Seminar: Innovative
Lehrstuhl Netzarchitekturen und Netzdienste Institut für Informatik Technische Universität München One way Delay (OWD) Determination Techniques Referent: Mislav Boras Betreuer: Dirk Haage Seminar: Innovative
Interdisziplinärer Systems-Engineering-Prozess am Beispiel Fahrzeug-Diagnose. Innovationsforum Integrierte Systementwicklung
 Interdisziplinärer Systems-Engineering-Prozess am Beispiel Fahrzeug-Diagnose Innovationsforum Integrierte Systementwicklung 19.05.2011 Theresa Lehner CreatingExcellence Gliederung Vorstellung ESG Herausforderungen
Interdisziplinärer Systems-Engineering-Prozess am Beispiel Fahrzeug-Diagnose Innovationsforum Integrierte Systementwicklung 19.05.2011 Theresa Lehner CreatingExcellence Gliederung Vorstellung ESG Herausforderungen
Diplomarbeit. Einsatz eines zuverlässigen Transportdienstes zur Simulation des zeitgesteuerten Echtzeitprotokolls TTP/C
 Diplomarbeit Einsatz eines zuverlässigen Transportdienstes zur Simulation des zeitgesteuerten Echtzeitprotokolls TTP/C Nawfel Chaieb Betreuer : Prof. Dr. Walter F. Tichy Betreuende Mitarbeiter : Dipl.-Inform.
Diplomarbeit Einsatz eines zuverlässigen Transportdienstes zur Simulation des zeitgesteuerten Echtzeitprotokolls TTP/C Nawfel Chaieb Betreuer : Prof. Dr. Walter F. Tichy Betreuende Mitarbeiter : Dipl.-Inform.
Agentenbasiertes Product Data Management
 Sonderforschungsbereich 361 Modelle und Methoden zur integrierten Produkt- und Prozessentwicklung Agentenbasiertes Product Data Management Dipl.-Ing. Roman Klement BMW AG Kooperative Produktentwicklung
Sonderforschungsbereich 361 Modelle und Methoden zur integrierten Produkt- und Prozessentwicklung Agentenbasiertes Product Data Management Dipl.-Ing. Roman Klement BMW AG Kooperative Produktentwicklung
Echtzeitfähige Kommunikation
 Echtzeitfähige Kommunikation Flexray 356 Motivation: Entwicklung eines kostengünstigen und damit automotivetauglichen Kommunikationsprotokolls, dass sowohl zeit- als auch ereignisgesteuerte Datenübertragung
Echtzeitfähige Kommunikation Flexray 356 Motivation: Entwicklung eines kostengünstigen und damit automotivetauglichen Kommunikationsprotokolls, dass sowohl zeit- als auch ereignisgesteuerte Datenübertragung
Softwaretest von verteilten Echtzeitsystemen im Automobil anhand von Kundenspezifikationen
 Softwaretest von verteilten Echtzeitsystemen im Automobil anhand von Kundenspezifikationen S. Jovalekic 1), G. Martinek 1), Th. Okrusch 2) 1), 73458 Albstadt 2) Robert Bosch GmbH, Abstatt Gliederung Einleitung
Softwaretest von verteilten Echtzeitsystemen im Automobil anhand von Kundenspezifikationen S. Jovalekic 1), G. Martinek 1), Th. Okrusch 2) 1), 73458 Albstadt 2) Robert Bosch GmbH, Abstatt Gliederung Einleitung
Anforderungsanalyse von Feldbussystemen in Hinblick auf den Einsatz in Ambient Intelligence
 Anforderungsanalyse von Feldbussystemen in Hinblick auf den Einsatz in Ambient Intelligence INF-M1 Anwendung 1 - Wintersemester 2009/2010 09.Dezember 2009 Gliederung Motivation Zielsetzung Anforderungen
Anforderungsanalyse von Feldbussystemen in Hinblick auf den Einsatz in Ambient Intelligence INF-M1 Anwendung 1 - Wintersemester 2009/2010 09.Dezember 2009 Gliederung Motivation Zielsetzung Anforderungen
Entwicklungsprozesse und -werkzeuge
 Entwicklungsprozesse und -werkzeuge Boris Nikolai Konrad boris.konrad@udo.edu PG Seminarwochenende 21.-23. Oktober 2007 1 Überblick Entwicklungsprozesse Unterstützungsprozesse Kernprozess Entwicklungswerkzeuge
Entwicklungsprozesse und -werkzeuge Boris Nikolai Konrad boris.konrad@udo.edu PG Seminarwochenende 21.-23. Oktober 2007 1 Überblick Entwicklungsprozesse Unterstützungsprozesse Kernprozess Entwicklungswerkzeuge
Quiz. Gegeben sei ein 16KB Cache mit 32 Byte Blockgröße. Wie verteilen sich die Bits einer 32 Bit Adresse auf: Tag Index Byte Offset.
 Quiz Gegeben sei ein 16KB Cache mit 32 Byte Blockgröße. Wie verteilen sich die Bits einer 32 Bit Adresse auf: Tag Index Byte Offset 32 Bit Adresse 31 3 29... 2 1 SS 212 Grundlagen der Rechnerarchitektur
Quiz Gegeben sei ein 16KB Cache mit 32 Byte Blockgröße. Wie verteilen sich die Bits einer 32 Bit Adresse auf: Tag Index Byte Offset 32 Bit Adresse 31 3 29... 2 1 SS 212 Grundlagen der Rechnerarchitektur
Bachelorarbeit. Arne Saggau
 Bachelorarbeit Arne Saggau Sicherheitsorientierte Weiterentwicklung der mikrocontrollerbasierten Telemetrie in einem Formula Student Rennwagen durch Migration von TTCAN zu FlexRay Fakultät Technik und
Bachelorarbeit Arne Saggau Sicherheitsorientierte Weiterentwicklung der mikrocontrollerbasierten Telemetrie in einem Formula Student Rennwagen durch Migration von TTCAN zu FlexRay Fakultät Technik und
Byzantinische Fehlertoleranz durch Gruppenkommunikation am Beispiel des Rampart-Toolkit Frank Mattauch
 1 Hauptseminar: Moderne Konzepte für weitverteilte Systeme: Peer-to-Peer-Netzwerke und fehlertolerante Algorithmen (DOOS) Byzantinische Fehlertoleranz durch Gruppenkommunikation am Beispiel des Rampart-Toolkit
1 Hauptseminar: Moderne Konzepte für weitverteilte Systeme: Peer-to-Peer-Netzwerke und fehlertolerante Algorithmen (DOOS) Byzantinische Fehlertoleranz durch Gruppenkommunikation am Beispiel des Rampart-Toolkit
Advanced Business Intelligence. Advanced Networking. Artificial Intelligence. Campus Offenburg Badstraße 24, 77652
 Advanced Business Intelligence Prerequisite english description Hours 4.0 Praktikum Data Mining Nr. E+I2118 Data Mining Nr. E+I2117 Advanced Networking Hours 4.0 Advanced Networking Nr. E+I2103 Praktikum
Advanced Business Intelligence Prerequisite english description Hours 4.0 Praktikum Data Mining Nr. E+I2118 Data Mining Nr. E+I2117 Advanced Networking Hours 4.0 Advanced Networking Nr. E+I2103 Praktikum
Bitte verwenden Sie nur dokumentenechtes Schreibmaterial!
 VO 182.713 Prüfung Echtzeitsysteme 27. März 2015 KNr. MNr. Zuname, Vorname Ges.)(100) 1.)(35) 2.)(25) 3.)(15) 4.)(25) Zusatzblätter: Bitte verwenden Sie nur dokumentenechtes Schreibmaterial! 1 Grundlagen
VO 182.713 Prüfung Echtzeitsysteme 27. März 2015 KNr. MNr. Zuname, Vorname Ges.)(100) 1.)(35) 2.)(25) 3.)(15) 4.)(25) Zusatzblätter: Bitte verwenden Sie nur dokumentenechtes Schreibmaterial! 1 Grundlagen
Bussysteme in der Fahrzeugtechnik
 Werner Zimmermann RalfSchmidgall Bussysteme in der Fahrzeugtechnik Protokolle und Standards Mit 188 Abbildungen und 99 Tabellen 2., aktualisierte und erweiterte Auflage ATZ/MTZ-Fachbuch vieweg IX Inhalt
Werner Zimmermann RalfSchmidgall Bussysteme in der Fahrzeugtechnik Protokolle und Standards Mit 188 Abbildungen und 99 Tabellen 2., aktualisierte und erweiterte Auflage ATZ/MTZ-Fachbuch vieweg IX Inhalt
7 Fehlertoleranz. vs7 1
 7 Fehlertoleranz vs7 1 Zuverlässigkeit (reliability) Sicherheit vor Fehlern (safety) Sicherheit vor Angriffen (security) -> Systemsicherheit -> Netzsicherheit vs7 2 7.1 Terminologie (ist nicht einheitlich)
7 Fehlertoleranz vs7 1 Zuverlässigkeit (reliability) Sicherheit vor Fehlern (safety) Sicherheit vor Angriffen (security) -> Systemsicherheit -> Netzsicherheit vs7 2 7.1 Terminologie (ist nicht einheitlich)
Eigenschaften von IP-Netzen (1 / 2)
") Eigenschaften von IP-Netzen (1 / 2) Eigenschaften von IP-Netzen: Das Netz überträgt Datenpakete (typische Länge: ungefähr 1.000 Bytes) Wichtige Design-Entscheidung: die Intelligenz sitzt in den Endgeräten.
Eigenschaften von IP-Netzen (1 / 2) Eigenschaften von IP-Netzen: Das Netz überträgt Datenpakete (typische Länge: ungefähr 1.000 Bytes) Wichtige Design-Entscheidung: die Intelligenz sitzt in den Endgeräten.
Echtzeitfähige Kommunikation
 Echtzeitfähige Kommunikation Zusammenfassung 373 Zusammenfassung Die Eignung eines Kommunikationsmediums für die Anwendung in n ist vor allem durch das Medienzugriffsverfahren bestimmt. Die maximale Wartezeit
Echtzeitfähige Kommunikation Zusammenfassung 373 Zusammenfassung Die Eignung eines Kommunikationsmediums für die Anwendung in n ist vor allem durch das Medienzugriffsverfahren bestimmt. Die maximale Wartezeit
Clustering (hierarchische Algorithmen)
") Clustering (hierarchische Algorithmen) Hauptseminar Kommunikation in drahtlosen Sensornetzen WS 2006/07 Benjamin Mies 1 Übersicht Clustering Allgemein Clustering in Sensornetzen Clusterheads Cluster basiertes
Clustering (hierarchische Algorithmen) Hauptseminar Kommunikation in drahtlosen Sensornetzen WS 2006/07 Benjamin Mies 1 Übersicht Clustering Allgemein Clustering in Sensornetzen Clusterheads Cluster basiertes
Vollvernetztes. Fahrzeug der Zukunft. 2015-09-24, main.it 2015
 Vollvernetztes Fahrzeug der Zukunft 2015-09-24, main.it 2015 Intedis as impulse from Hella & Leoni 2001 gegründet zur Entwicklung von System-Lösungen im Body-/Komfort-Bereich Hella Body Controllers LEONI
Vollvernetztes Fahrzeug der Zukunft 2015-09-24, main.it 2015 Intedis as impulse from Hella & Leoni 2001 gegründet zur Entwicklung von System-Lösungen im Body-/Komfort-Bereich Hella Body Controllers LEONI
Neuer Funkrufmaster: DAPNET Folien: Daniel Sialkowski und Ralf Wilke. 2. Hamnettagung in Aachen,
 Neuer Funkrufmaster: DAPNET Folien: Daniel Sialkowski und Ralf Wilke 2. Hamnettagung in Aachen, 19.11.2016 Inhalt ) I. Einführung: Paging-Sendernetzwerke Vergleich mit Mobilfunknetzen )))) Quelle: C. Jansen,
Neuer Funkrufmaster: DAPNET Folien: Daniel Sialkowski und Ralf Wilke 2. Hamnettagung in Aachen, 19.11.2016 Inhalt ) I. Einführung: Paging-Sendernetzwerke Vergleich mit Mobilfunknetzen )))) Quelle: C. Jansen,
Fehlertoleranzanalyse des FlexRay Startup-Prozesses
 Fehlertoleranzanalyse des FlexRay Startup-Prozesses Sven Bünte 1 und Paul Milbredt 2 1 Technische Universität Wien, sven@vmars.tuwien.ac.at 2 AUDI AG, I/EE-81, paul.milbredt@audi.de Zusammenfassung. Die
Fehlertoleranzanalyse des FlexRay Startup-Prozesses Sven Bünte 1 und Paul Milbredt 2 1 Technische Universität Wien, sven@vmars.tuwien.ac.at 2 AUDI AG, I/EE-81, paul.milbredt@audi.de Zusammenfassung. Die
MESSTECHNIK. Die neue Generation.
 Die neue Generation. ROTEC Die vierte Generation von ROTEC Messsystemen. Das ROTEC wurde für einen noch flexibleren Einsatz entwickelt. Es ist mobiler, vielseitiger und bietet eine verbesserte Signalqualität
Die neue Generation. ROTEC Die vierte Generation von ROTEC Messsystemen. Das ROTEC wurde für einen noch flexibleren Einsatz entwickelt. Es ist mobiler, vielseitiger und bietet eine verbesserte Signalqualität
Lokalisierung und Topologiekontrolle
 Lokalisierung und Topologiekontrolle Seminar: Kommunikation in drahtlosen Sensornetzwerken Martin Schmidt Einführung Lokalisierung: Für viele Informationen ist die Position wichtig Traditionelle Technik
Lokalisierung und Topologiekontrolle Seminar: Kommunikation in drahtlosen Sensornetzwerken Martin Schmidt Einführung Lokalisierung: Für viele Informationen ist die Position wichtig Traditionelle Technik
CANape Option Bypassing
 Produktinformation Inhaltsverzeichnis 1 Übersicht... 3 1.1 Einführung... 3 1.2 Die Vorteile im Überblick... 3 1.3 Anwendungsgebiete... 4 1.4 Systemvoraussetzung... 4 1.5 Weiterführende Informationen...
Produktinformation Inhaltsverzeichnis 1 Übersicht... 3 1.1 Einführung... 3 1.2 Die Vorteile im Überblick... 3 1.3 Anwendungsgebiete... 4 1.4 Systemvoraussetzung... 4 1.5 Weiterführende Informationen...
Feldbus & Netzwerk Technologie
 Feldbus & Netzwerk Technologie Feldbustechnologie Motivation Grundlegende Merkmale von Bussystemen Feldbussysteme PROFIBUS DP Ethernet AS-Interface INTERBUS CANopen 2 Motivation Was ist ein Feldbus? -
Feldbus & Netzwerk Technologie Feldbustechnologie Motivation Grundlegende Merkmale von Bussystemen Feldbussysteme PROFIBUS DP Ethernet AS-Interface INTERBUS CANopen 2 Motivation Was ist ein Feldbus? -
USB. Susanne Grein Hochschule RheinMain Fachseminar 2009
 USB Susanne Grein Hochschule RheinMain Fachseminar 2009 Begriffsklärung Bus? Universal Serial Bus Seriell: Bits nacheinander auf einer Leitung übertragen Verbindung Computer - Peripheriegerät Eigenschaften
USB Susanne Grein Hochschule RheinMain Fachseminar 2009 Begriffsklärung Bus? Universal Serial Bus Seriell: Bits nacheinander auf einer Leitung übertragen Verbindung Computer - Peripheriegerät Eigenschaften
Bussysteme im Automobil CAN, FlexRay und MOST
 Bussysteme im Automobil CAN, FlexRay und MOST Thomas Dohmke Technische Universität Berlin Fakultät Elektrotechnik und Informatik Fachgebiet Softwaretechnik In Zusammenarbeit mit der
Bussysteme im Automobil CAN, FlexRay und MOST Thomas Dohmke Technische Universität Berlin Fakultät Elektrotechnik und Informatik Fachgebiet Softwaretechnik In Zusammenarbeit mit der
Ein Überblick über MIMO- Systeme und deren Einsatzgebiete.
 Fakultät Informatik - Institut für Technische Informatik - Professur für VLSI-Entwurfssysteme, Diagnostik und Architektur Vortrag zum Hauptseminar Ein Überblick über MIMO- Systeme und deren Einsatzgebiete.
Fakultät Informatik - Institut für Technische Informatik - Professur für VLSI-Entwurfssysteme, Diagnostik und Architektur Vortrag zum Hauptseminar Ein Überblick über MIMO- Systeme und deren Einsatzgebiete.
CANape Option Bypassing
 Produktinformation Inhaltsverzeichnis 1 Übersicht... 3 1.1 Einführung... 3 1.2 Die Vorteile im Überblick... 3 1.3 Anwendungsgebiete... 4 1.4 Systemvoraussetzung... 4 1.5 Weiterführende Informationen...
Produktinformation Inhaltsverzeichnis 1 Übersicht... 3 1.1 Einführung... 3 1.2 Die Vorteile im Überblick... 3 1.3 Anwendungsgebiete... 4 1.4 Systemvoraussetzung... 4 1.5 Weiterführende Informationen...
Modell-basierte Entwicklung mit der Timing Definition Language (TDL)
") Modell-basierte Entwicklung mit der Timing Definition Language (TDL) Prof. Dr. Wolfgang Pree Univ. Salzburg Inhalt Motivation für einen Paradigmenwechsel bisher: zuerst Plattform, dann Software => Software
Modell-basierte Entwicklung mit der Timing Definition Language (TDL) Prof. Dr. Wolfgang Pree Univ. Salzburg Inhalt Motivation für einen Paradigmenwechsel bisher: zuerst Plattform, dann Software => Software
Seminar: IT-Sicherheit in eingebetteten, automotiven Systemen
 Seminar: IT-Sicherheit in eingebetteten, automotiven Systemen Christoph Krauß, Frederic Stumpf {christoph.krauss frederic.stumpf}@sit.fraunhofer.de Fraunhofer-Institute for Secure Information Technology
Seminar: IT-Sicherheit in eingebetteten, automotiven Systemen Christoph Krauß, Frederic Stumpf {christoph.krauss frederic.stumpf}@sit.fraunhofer.de Fraunhofer-Institute for Secure Information Technology
Der Backoff-Algorithmus
 Der Backoff-Algorithmus Ausarbeitung im Rahmen der Vorlesung Lokale und Weitverkehrsnetze II (Prof. Koops) SS 2001 3570316 Lars Möhlmann 3570317 Jens Olejak 3570326 Till Tarara Fachhochschule Oldenburg/Ostfriesland/Wilhelmshaven
Der Backoff-Algorithmus Ausarbeitung im Rahmen der Vorlesung Lokale und Weitverkehrsnetze II (Prof. Koops) SS 2001 3570316 Lars Möhlmann 3570317 Jens Olejak 3570326 Till Tarara Fachhochschule Oldenburg/Ostfriesland/Wilhelmshaven
Laptop A location aware peer-to-peer overlay network
 Laptop A location aware peer-to-peer overlay network Chi-Jen Wu, De-Kai Liu and Ren-Hung Hwang Seminar peer-to-peer Netzwerke Prof. Dr. Christian Schindelhauer 29. Juli 2009 Überblick Was ist Laptop? Aufbau
Laptop A location aware peer-to-peer overlay network Chi-Jen Wu, De-Kai Liu and Ren-Hung Hwang Seminar peer-to-peer Netzwerke Prof. Dr. Christian Schindelhauer 29. Juli 2009 Überblick Was ist Laptop? Aufbau