Geschlossene Kurven. c(a )=c(b ) c(a)=c(b)
|
|
|
- Alke Beyer
- vor 7 Jahren
- Abrufe
Transkript
1 Geschlossene Kurven Def. Eine parametrisierte Kurve c C 0 ([a,b];r n ) heißt geschlossen, wenn c(a) = c(b). Sie heißt k- Glatt (Bezeih. C k ), wenn außerdem c (a) = c (b),...,c (k) (a) = c (k) (b), d.h. wenn in den Endpunkten alle Ableitungen übereinstimmen. Äquivalent ist die Bedingung, dass die periodische Fortsetzung der Kurve eine Kurve in C k (R;R 2 ) liefert. Wiederum kann man durch Äquivalenzklassenbildung geschlossene Kurven [c] oder geschlossene orientierte Kurven c definieren. Auch solche Parametrisierungen sollen dabei als äquivalent angesehen werden, die sich nur um die Wahl des Markierungspunktes c(a) = c(b) unterscheiden; das definiert man am einfachsten, indem man die Kurve auf ganz R periodisch fortsetzt. c(a )=c(b ) c(a)=c(b)
2 Einfache ebene Kurven und Umlaufzahl Def. Eine geschlossene Kurve c : [a,b] R n heißt einfach, wenn sie auf dem halboffenen Intervall [a, b) injektiv ist (geometrisch bedeutet das, dass sie keine Selbstschnittpunkte hat).
![Umlaufzahl geschlossener ebener Kurven Es sei c C 1 ([0,L];R 2 ) eine reguläre geschlossene Kurve.](/docs-images/63/49739058/images/3-0.jpg "Nach Korollar 2 existiert eine Funktion 1 θ : [0,L] R, sodass c (t) c (t) = ( ) cos(θ(t)) sin(θ(t)) : Korollar 2.")
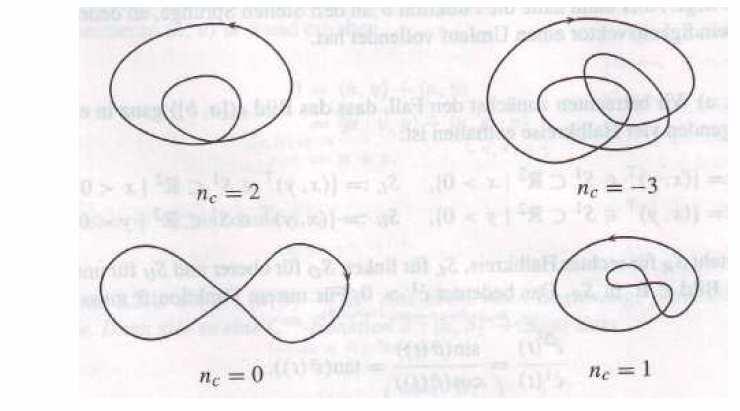
3 Umlaufzahl geschlossener ebener Kurven Es sei c C 1 ([0,L];R 2 ) eine reguläre geschlossene Kurve. Nach Korollar 2 existiert eine Funktion 1 θ : [0,L] R, sodass c (t) c (t) = ( ) cos(θ(t)) sin(θ(t)) : Korollar 2. Für jede Kurve c C 2 ([a,b];r 2 ) existiert θ C 1 ([a,b];r), sodass 1 c (t) c (t) = ( ) cos(θ(t)). Ferner gilt: die Funktion θ ist bis auf Addition von Vielfachen von eindeutig bestimmt. sin(θ(t)) Da c (0) = c (L), ist ( ) ( ) cos(θ(0)) sin(θ(0)) = cos(θ(l)) sin(θ(l)) und deswegen θ(l) = θ(0)+n. Def. Die (ganze) Zahl n = n c heißt Umlaufzahl der (geschlossenen ebenen) Kurve c. Im Bild links ist die Umlaufzahl der ersten Kurve gleich 0 und der zweiten gleich 2. (Das Bild sowie das Bild auf der nächsten Folie habe ich aus dem Vortrag von Florian Modler entnommen)
4
5 Die Umlaufzahl ist wohldefiniert Korollar 2. Für jede Kurve c C 2 ([a,b];r 2 ) existiert θ C 1 ([a,b];r) sodass 1 c (t) c (t) = ( ) cos(θ(t)). sin(θ(t)) Ferner gilt: die Funktion θ ist eindeutig bestimmt bis auf Addition von Vielfachen von. Die natürliche Frage, die sofort bei jeder solchen Definition (wenn die Objekte, die man in der Definition verwendet, nicht eindeutig sind) gestellt werden kann: Warum hängt die Zahl n c nur von der Kurve c und nicht auch von der Wahl von θ? Warum bekommen wir die gleiche Zahl n c, wenn wir θ durch θ +N ersetzen? In diesem Fall ist die Antwort offensichtlich: n c = 1 1 (θ(l)+n θ(0) N) = (θ(l) θ(0))
6 Die Umlaufzahl ist eine geometrische Größe (bzgl. orientierungserhaltenden Umparameterisierungen und orientierungserhaltenden Bewegungen. Es ist offensichtlich, dass die orientierungserhaltenden Bewegungen F die Umlaufzahl erhalten: wenn F(X) = OX +b, wobei O die Drehung um den Winkel α ist, dann ist die Winkelfunktion θ(t) der Kurve c = F c gleich θ(t) = θ(t)+α. Dann ist θ(b) θ(a) = θ(b)+α θ(a) α = n c. Bei geschlossenen Kurven gibt es zwei Typen von Umparametrisierungen: eine ist c = c φ, und der andere Typ ist mit der Wechsel von Anfangspunkt verbunden: Wenn wir als Anfangspunkt den Punkt a 0 [a,b) wählen, dann ist die umparametrisierte Kurve c gegeben durch { φ : [a 0,a 0 +(b a)] R n, φ(t) = φ(t) für t [a 0,b) φ(t (a 0 a)) für t [b,b +a 0 a) Die Aussage, dass die Umlaufzahl invariant bzgl. Umparametrisierung von Typ 1 ist, ist offensichtlich, weil wir wissen, dass 1 c (t) c 1 (t) = c (φ(t)) c (φ(t)), siehe z.b. S. 14 Vorl. 3, und deswegen θ(t) = θ(φ(t)). Für den Beweis im Falle von Umparametrisierungen von Typ 2 werden wir die Integralformel benutzen, die wir auf der nächsten Folien einführen, und die auch später hilfreich wird.
7 Integralformel für die Umlaufzahl Sei die Kurve c zunächst nach der Bogenlänge parametrisiert; wir können das OBdA annehmen. Im Beweis von Korollar 2 haben wir dann die folgende Formel für θ bekommen (siehe S. 14 von Vorl. 5): θ(t) := θ a + t a Anfangsbedingung θ a so gewählt wird, dass c (a) = ( cos(θ a) sin(θ a) Also, n c = 1 (θ(b) θ(a)) = 1 b a κ(σ)dσ. ( ) κ(σ)dσ, wobei die Sei jetzt die Kurve c(t) eine beliebige Umparametrisierung einer nach der Bogenlänge parametrisierten geschlossenen Kurve c : [0,L] R 2. Dann können wir die Parametertransformation in ( ) durchführen analog zum Beweis, dass die Länge der Kurve eine geometrische Größe ist (siehe S. 23 Vorl. 1) : wir benutzen κ(t) = κ(φ(t)) und wenden die Substitutionsformel (siehe S. 23 von Vorl. 1) auf f(t) = κ(t) an: n c ( ) = 1 L=φ(b) 0=φ(a) κ(s)ds = 1 b a b κ(φ(t)) φ (t)dt ( ) = 1 κ(t) c (t) dt. a Anm.: Erklärung von ( ) siehe auf S. 3 von Vorl. 2 ).
8 Die Umlaufzahl ist unabhängig von der Wahl des Anfangspunkts b Die Integralformel n c = 1 κ(σ)dσ impliziert, dass die Umlaufzahl a unabhängig von Wahl des Anfangspunkts der (geschlossenen) Kurve ist. In der Tat, obda können wir annehmen, dass die Kurve c(t) nach der Bogenlänge parametrisiert ist. Dann ist auch c gegeben durch { c : [a 0,a 0 +(b a) R n c(t) für t [a, c(t) = 0,b) c(t (a 0 a)) für t [b,b +a 0 a) und nach der Bogenlänge parameterisiert, weil c (t) = 1. Ferner gilt: κ(t) = { κ(t) für t [a 0,b) κ(t (a 0 a)) für t [b,b + a 0 a) Die Integralformel (siehe ( ) oben) für die Umlaufzahl von c gibt uns dann ( b a0 ) b n c = 1 κ(σ)dσ = 1 κ(σ)dσ + κ(σ)dσ a a a 0 ( b ) b+a0 a = 1 κ(σ)dσ + κ(σ)dσ = n c. a 0 b
9 Hopfscher Umlaufsatz (1935) Satz 5. Eine einfache geschlossene Kurve c hat Umlaufzahl n c { 1,1}. Bsp. Die positivorientierte Kreislinie c(t) = ( ) cos(t) sin(t) hat κ(t) 1 und n c = 1 1dt = 1. Die negativorientierte Kreislinie c(t) = ( ) sin(t) 0 cos(t) hat κ(t) 1 und n c = 1 2φ 0 1dt = 1. Obwohl die Aussage relativ natürlich aussieht, wird der Beweis ziemlich lang (wir werden noch 2 Hilfslemmas, Lemma 4 und Lemma 5, beweisen) und benutzt ein paar neue Tricks, die auch später verwendet werden.
10 Lemma 4. Ist γ C 0 ([a,b];r 2 ), sodass γ(t) = 1 für jedes t I. Dann gibt es ein θ C 0 ([a,b];r) mit γ(t) = ( ) cos(θ(t)) sin(θ(t)) für alle t [a,b]; dieses θ ist eindeutig bestimmt bis auf Addition von Vielfachen von. Bemerkung. Bitte vergleichen Sie diese Aussage mit Korollar 2 (Vorl. 3, S. 14); das Korollar ist ein Spezialfall des Lemmas 4 mit γ(t) = 1 c (t) c (t); das Lemma benutzt aber verminderte Glattheit. Beweis. Als Vorarbeit zeigen wir die Existenz von θ(t) zuerst unter der Annahme, dass γ die Werte im rechten Quadranten sind, also unter der Annahme, dass für jedes t gilt: γ(t) = ( ) γ 1 (t) γ 2 (t) erfüllt die Bedingung γ 1 (t) > 0. In diesem Fall kann man die Funktion θ mit einer Formel angeben: um diese Formel zu bekommen überlegen wir, dass die gewünschte Bedingung γ(t) = ( ) cos(θ(t)) sin(θ(t)) impliziert, dass γ 2(t) γ = sin(θ(t)) 1(t) cos(θ(t)) = tan(θ(t)), also ) ) θ(t) = arctan sein muss. Die Funktion θ(t) = arctan ist ( γ2(t) γ 1(t) ( γ2(t) γ 1(t) wohldefiniert (unter unserer zusätzlicher Annahme an γ), ist eine stetige Funktion als Verkettung von stetigen Funktionen, und man sieht sofort aus geometrischen Überlegungen, dass γ(t) = ( ) cos(θ(t)) sin(θ(t)), und prüft dies durch Einsetzen und Anwendung trigonometrischer Formeln nach.
11 Analog zeigt man das Lemma, falls γ die Werte nur in den obigen Quadranten (also, falls γ 2 > 0). In diesem Fall benutzt man die Funktion arccotan γ1 γ 2, oder in den linken Quadranten (in diesem Fall arctan γ2 γ 1 +π) oder in den unteren Quadranten (arccotan γ1 γ 2 +π). Diese Funktion θ ist selbstverständlich bis auf Addition von n bestimmt. Wir brauchen noch die folgende geometrische Überlegung: falls γ(t 1 ) und γ(t 2 ) die Eigenschaften γ(t 1 ) = 1 bzw. γ(t 2 ) = 1 haben, und γ(t 1 ) γ(t 2 ) < 2 ist, dann liegen γ(t 1 ) undγ(t 2 )entwederbeideindenrechten Quadranten, oder beide in den linken Quadranten, oder beide in den oberen Quadranten, oder beiden in den unteren Quadranten: Jedes Intervall der Länge < Wurzel(2) liegt vollständigt in zwei benachtbaren Quadranten
12 Jetzt benutzen wir die Stetigkeit von γ und Kompaktheit des Intervalls: aus der Analysis wissen wir, dass jede stetige Funktion, die auf einem Kompaktum definiert ist, gleichmäßig stetig ist; also ε > 0 existiert ein δ > 0 sodass für alle t 1, t 2 mit t 1 t 2 < δ gilt γ(t 1 ) γ(t 2 ) < ε. Wir nehmen ε = 2, und zerlegen für entsprechendes δ das Intervall [a,b] in Intervalle der Länge < δ. a Jedes Subintervall hat die Eigenschaft, dass für jede t 1,t 2 aus dem Subintervall gilt γ(t 1 ) γ(t 2 ) < 2 und deswegen können wir auf jedem Subintervall die Funktion θ mit der gewünschten Eigenschaft γ(t) = ( cos(θ(t)) sin(θ(t)) b ) konstruieren. Also können wir eine solche Funktion θ auf dem ersten(, auf dem Bild roten) Intervall definieren. Dann definieren wir die Funktion auf dem zweiten (blauen) Intervall und addieren n zur Funktion θ (auf dem zweiten Intervall), sodass der Wert von θ auf dem Endpunkt des roten Intervall mit dem Wert von θ auf dem Anfangspunkt des blauen Intervalls zusammenfällt. Das ist möglich, weil in diesem Punkt ( ) ( ) cos(θ) sin(θ) = γ(t) = cos(θ) sin(θ). Also, haben wir die stetige Funktion θ auf der Vereinigung der ersten zwei Intervalle definiert. Wir setzten die Konstruktion fort und nach endlich viel Schritten bekommen wir die gewünschte Funktion θ auf dem ganzen Intervall.
13 Liftungslemma Def. Eine sternförmige Menge ist eine Teilmenge M des R n, zu der es einen Punkt p 0 gibt (ein Sternzentrum bzw. einen Sternmittelpunkt), von dem aus alle Punkte der Menge sichtbar sind, das heißt, jede gerade Verbindungsstrecke von p 0 zu einem beliebigen Punkt p M liegt vollständig in M. P P0 Lemma 5. Für A R n kompakt und sternförmig sei γ : A R 2 eine stetige Abbildung so, dass p A gilt γ(p) = 1. Dann gibt es eine stetige Funktion θ : A R sodass γ(p) = ( ) cos(θ(p)) sin(θ(p)). Ferner gilt: Je zwei solche Funktionen haben als Differenz ein ganzzahliges Vielfaches von. Bemerkung. In jedem Punkt p ist die Existenz eines θ mit γ(p) = ( ) cos(θ(p)) sin(θ(p)) offensichtlich, weil γ(p) = 1. Dieses θ ist bis auf n gegeben.
14 Sternförmigkeit ist wichtig Lemma 4. Für A R n kompakt und sternförmig sei γ : A R 2 eine stetige Abbildung, ( sodass ) p A cos(θ(p)) gilt γ(p) = 1. Dann gibt es eine stetige Funktion θ : A R sodass γ(p) =. sin(θ(p)) Ferner gilt: Je zwei solche Funktionen haben als Differenz ein ganzzahliges Vielfaches von. Gegenbeispiel. Auf dem Kreisring R := {x R < x < 1} (mit Loch) betrachte man γ : R R 2, γ(x) = 1 x x, γ ist offensichtlich stetig, x R gilt γ(x) = 1, jedoch gibt es keine stetige Funktion θ sodass γ(p) = ( cos(θ(p)) sin(θ(p)) ) : Solche Funktion θ existiert lokal (also, in einer kleinen Umgebung eines beliebigen Punktes). Wenn wir das Loch einmal umlaufen, wird zu θ addiert, was der Stetigkeit widerspricht.
15 Beweis des Liftungslemmas Lemma 5. Für A R n kompakt und sternförmig sei γ : A R 2 eine stetige Abbildung, ( sodass ) p A cos(θ(p)) gilt γ(p) = 1. Dann gibt es eine stetige Funktion θ : A R, sodass γ(p) =. sin(θ(p)) Ferner gilt: Je zwei solche Funktionen haben als Differenz ein ganzzahliges Vielfaches von. OBdA sei A sternförmig bezüglich 0. Wir legen θ( 0) willkürlich fest, so dass γ( 0) = ( ) cos(θ( 0)) sin(θ( 0)) gilt. Nun legen wir θ auf ganz A dadurch fest, dass θ auf jedem Strahl durch 0 eine stetige Funktion sein soll, die γ(p) = ( ) cos(θ(p)) sin(θ(p)) genügt. D.h.: um den Wert θ(p) zu bestimmen, betrachten wir das Intervall I, das durch 0 und p geht (z.b. Schnittmenge der Geraden G( 0,p) mit A). Dann betrachten wir die Funktion θ I auf dem Intervall, die die Bedingung ( ) cos(θ(p)) sin(θ(p)) erfüllt eine solche Funktion existiert laut Lemma 4 und setzen θ(p) = θ I (p) Die Funktion θ erfüllt nach Konstruktion die Bedingung γ(p) = ( cos(θ(p)) sin(θ(p)) wir müssen nur zeigen, dass θ stetig ist. P O ),
16 Stetigkeit der konstruierten Funktion θ Wir benutzten die Stetigkeit von γ; analog zum Beweis von Lemma 4 benutzen wir, dass jede stetige Funktion auf einem Kompaktum gleichmäßig stetig ist, also : ε > 0 existiert ein δ > 0, sodass für alle p 1,p 2 A mit p 1 p 2 < δ gilt: γ(p 1 ) γ(p 2 ) < ε. Wir nehmen ε = 1, dann haben 2 Punkte p 1,p 2 A mit Abstand p 1 p 2 < δ die Eigenschaft, dass γ(p 1 ) γ(p 2 ) < 1. Jetzt nehmen wir beliebige Punkte x,y A, sodass x y < δ und betrachten die Hilfsfunktion h : [0,1] R, h(s) = θ(sx) θ(sy). Die Funktion ist stetig und erfüllt h(0) = θ( 0) θ( 0) = 0. Wir behaupten, dass h(s) ( π 2, π 2) ist.
17 Beweis von h(s) ( π 2, π 2 ) Hilfsfunktion h : [0,1] R, h(s) = θ(sx) θ(sy). Die Funktion ist stetig und erfüllt h(0) = θ( 0) θ( 0) = 0. Nehmen wir an, es gibt ein s mit h(s) > π 2. Wegen der Stetigkeit von h existiert dann ein s 0 [0,1] mit h(s 0 ) = π 2 (Zwischenwertsatz). Aber einerseits ist s 0 x s 0 y = s 0 x y < δ, und deswegen γ(sx) γ(sy) < 1. Andererseits impliziert die Bedingung h(s 0 ) = π 2, dass der Punkt γ(s 0y) eine 90 -Drehung des Punktes γ(s 0 x) (in der positiven oder negativen Drehrichtung) ist und deswegen Abstand 2 > 1 zu γ(s0 x) hat. Wir bekommen einen Widerspruch, was zeigt, dass h(s) ( π 2, π 2).
18 Da zwei beliebige Punkte jedes δ 2-Balls Abstand < δ haben, zeigt die oben bewiesene Behauptung, dass für jeden Ball von Radius δ 2 und für alle p 1,p 2 aus dem Ball gilt: θ(p 1 ) θ(p 2 ) < π/2. Dann liegen alle Punkte des Balles in der Vereinigung von 2 benachbarten Quadranten. Dann kann man die Funktion θ in diesem Ball mit einer Formel mit Hilfe von arctan oder arccotan eingeben, wie auf S. 10 und S. 11. Nimmt z.b. die Funktion γ Werte ) in einem der rechten Quadranten an, so ist θ(p) = arctan + πn(p) für eine ganzzahlige Funktion n(p). Da ( γ2(p) γ 1(p) aber θ(p 1 ) θ(p 2 ) < π/2, ist) n(p) für alle Punkte p des Balls gleich. Daher ist θ(p) = arctan +πn (wobei n eine Konstante) und ( γ2(p) γ 1(p) damit stetig im Ball. Für jeden Ball von Radius δ/2 haben wir also die Stetigkeit von θ, eingeschränkt auf den Ball, gezeigt. Also ist θ tatsächlich stetig.
19 Beweis des Umlaufsatzes Satz 5. Eine einfache geschlossene Kurve c hat Umlaufzahl n c { 1,1}. OBdA können wir annehmen, dass die (einfache geschlossene) Kurve c auf [0,1) definiert ist, also c : [0,1] R 2. Wir zeigen zuerst, dass es einen Punkt c(t 0 ) gibt, sodass die Tangentialgerade {c(t 0 )+sc (t0) s R} die Kurve nicht schneidet. Um die Existenz eines solchen Punktes zu beweisen, betrachten wir eine Schaar von Kreisen K(M,r R > 0), deren Mittelpunkt fest ist und deren Radien positive reelle Zahlen sind. Nehmen wir r max = sup{r R K(M,r) Bahn(c) } (auf dem Bild links hat der entsprechende Kreis rote Farbe). Der Schnittpunkt des Kreises K(M,r max) mit der Bahn der Kurve existiert wegen der Kompaktheit des Intervalls [0,1] (weil das der Punkt ist, in welchem die stetige Funktion M c(t), die auf einem kompakten Intervall [0,1] definiert ist, ihren maximalen Wert annimmt). Alle Punkte der Kurve liegen innerhalb des roten Kreises. Deswegen hat die Tangentialgerade in diesem Schnittpunkt keinen weiteren gemeinsamen Punkt mit c.
20 OBdA können wir annehmen, dass t 0 = 0, c(0) = 0 und dass der Tangentialvektor in diesem Punkt gleich ( ) 1 0 ist. In diesem Fall ist die zweite Komponente der Kurve, c 2 (t), entweder überall nichtnegativ (und 0 nur für t = 0), wie auf dem Bild unten, oder überall nichtpositiv (und 0 nur für t = 0). Wir betrachten zuerst Fall 1, dass c 2 (t) nichtnegativ ist; das Ziel ist zu zeigen, dass dann n c = 1. C(0)=0 C(0)=0 Abbildung : Links Fall 1; rechts Fall 2
21 Wir betrachten die folgende Menge A R 2, die nichts mit c zu tun hat: A := {(s,t) R 2 0 s t 1}. Die Menge A ist offensichtlich sternförmig. Auf A betrachten wir die Sekanten-/Tangentenrichtung -Funktion γ, die wie folgt mit Hilfe von c konstruiert wurde: c(t) c(s) c(t) c(s) für s < t und (s,t) (0,1) c γ(s,t) := (t) c(t) für s = t c (0) c (0) für s = 0 und t = 1 Nach Definition von c ist γ stetig auf A. Nach Konstruktion ist γ(t) 1. Nach dem Liftungslemma (Lemma 5) gibt es eine stetige Winkelfunktion θ : A R der Sekanten-/Tangentenrichtung γ. Auf der Diagonalen t (t,t) ist θ(t,t) der Tangentenwinkel von c. Daher ist n c = 1 (θ(1,1) θ(0,0)) die Umlaufzahl.
22 Daher ist n c = 1 (θ(1,1) θ(0,0)) die Umlaufzahl. Wir wollen nun n c berechnen, indem wir θ(s,t) längs der beiden achsenparallelen Randkurven von A verfolgen, d.h. längs der Kurven t (0,t) und s (s,1). Wir führen also erst den einen Sekantenpunkt c(t) einmal um die Kurve herum (und der zweite ist c(0) = 0), dann den anderen c(s) (wobei der erste c(0) = 0 bleibt). Wir können festlegen, dass θ(0,0) = 0. Um n c = 1 zu beweisen, müssen wir θ(1,1) = beweisen. Nun ist θ(0,t) gerade der (stetige) Winkel des Vektors c(t) mit der x-achse. Da c die positive x-achse nicht mehr schneidet, ist θ(0,t) mod. Andererseits ist (im ersten Fall) (0,t) positiv für kleine t. Also liegt θ(0,t) im Intervall (0,π) für t 0, und wegen θ(0,1) = 0 mod π muss gelten θ(0,1) = π. Die Funktion θ(s, 1) beschreibt den Winkel von c(s) mit der x-achse; für sie können wir genauso argumentieren: Einerseits ist θ(s,1) mod für s 0. Andererseits ist θ(s,1) größer als π für kleine s. Daher gilt θ(s,1) (π,3π), und wegen θ(1,1) = 0 mod folgt wie gewünscht θ(1,1) =. Damit ist der Umlaufsatz unter den Annahmen des ersten Falls bewiesen. Im zweiten Fall erhält man als θ-intervalle (,0) und ( 3π, π), so dass man analog θ(1,1) =, also n c = 1, zeigen kann.
Vorlesung Klassische Differentialgeometrie
 Vorlesung Klassische Differentialgeometrie Ich werde mindestens die ersten Vorlesungen mit Beamer halten; die Folien sind auf meiner Homepage verfügbar. Die Vorlesung wird im Modus 4+2 angeboten. Lehramt-Studierende
Vorlesung Klassische Differentialgeometrie Ich werde mindestens die ersten Vorlesungen mit Beamer halten; die Folien sind auf meiner Homepage verfügbar. Die Vorlesung wird im Modus 4+2 angeboten. Lehramt-Studierende
MAA = MAB + B AA = B CA + CAA BA A Nun sehen wir mit Proposition 10.7 aus dem Skript, dass A M AB gelten muss.
 1. Konvexität in der absoluten Ebene In einem Dreieck in der Euklidischen Ebene hat die Strecke zwischen zwei Seitenmittelpunkten die halbe Länge der dritten Seite. In der absoluten Ebene hat man eine
1. Konvexität in der absoluten Ebene In einem Dreieck in der Euklidischen Ebene hat die Strecke zwischen zwei Seitenmittelpunkten die halbe Länge der dritten Seite. In der absoluten Ebene hat man eine
Klausurenkurs zum Staatsexamen (WS 2014/15): Differential und Integralrechnung 6
: Differential und Integralrechnung 6") Dr. Erwin Schörner Klausurenkurs zum Staatsexamen (WS 204/5): Differential und Integralrechnung 6 6. (Frühjahr 2009, Thema, Aufgabe 3) Sei r > 0. Berechnen Sie die Punkte auf der Parabel y = x 2 mit dem
Dr. Erwin Schörner Klausurenkurs zum Staatsexamen (WS 204/5): Differential und Integralrechnung 6 6. (Frühjahr 2009, Thema, Aufgabe 3) Sei r > 0. Berechnen Sie die Punkte auf der Parabel y = x 2 mit dem
Klausurenkurs zum Staatsexamen (SS 2015): Differential und Integralrechnung 6
: Differential und Integralrechnung 6") Dr. Erwin Schörner Klausurenkurs zum Staatsexamen (SS 205): Differential und Integralrechnung 6 6. (Frühjahr 2009, Thema, Aufgabe 3) Sei r > 0. Berechnen Sie die Punkte auf der Parabel y = x 2 mit dem
Dr. Erwin Schörner Klausurenkurs zum Staatsexamen (SS 205): Differential und Integralrechnung 6 6. (Frühjahr 2009, Thema, Aufgabe 3) Sei r > 0. Berechnen Sie die Punkte auf der Parabel y = x 2 mit dem
Topologische Grundbegriffe I. 1 Offene und Abgeschlossene Mengen
 Topologische Grundbegriffe I Vortrag zum Proseminar Analysis, 26.04.2010 Nina Neidhardt und Simon Langer Im Folgenden soll gezeigt werden, dass topologische Konzepte, die uns schon für die Reellen Zahlen
Topologische Grundbegriffe I Vortrag zum Proseminar Analysis, 26.04.2010 Nina Neidhardt und Simon Langer Im Folgenden soll gezeigt werden, dass topologische Konzepte, die uns schon für die Reellen Zahlen
Drehung um einen Punkt um Winkel α.
 Drehung um einen Punkt um Winkel α. Sei A R 2 und α R. Drehung um A um Winkel α ist eine Abbildung D A (α) : R 2 R 2 welche wie folgt definiert ist: D A (α) = T A D 0 (α) T ( A), wobei die Abbildung D
Drehung um einen Punkt um Winkel α. Sei A R 2 und α R. Drehung um A um Winkel α ist eine Abbildung D A (α) : R 2 R 2 welche wie folgt definiert ist: D A (α) = T A D 0 (α) T ( A), wobei die Abbildung D
10 Untermannigfaltigkeiten
 10. Untermannigfaltigkeiten 1 10 Untermannigfaltigkeiten Definition. Eine Menge M R n heißt k-dimensionale Untermannigfaltigkeit des R n, 1 k n, falls es zu jedem a M eine offene Umgebung U R n von a und
10. Untermannigfaltigkeiten 1 10 Untermannigfaltigkeiten Definition. Eine Menge M R n heißt k-dimensionale Untermannigfaltigkeit des R n, 1 k n, falls es zu jedem a M eine offene Umgebung U R n von a und
1. Aufgabe [2 Punkte] Seien X, Y zwei nicht-leere Mengen und A(x, y) eine Aussageform. Betrachten Sie die folgenden Aussagen:
![1. Aufgabe [2 Punkte] Seien X, Y zwei nicht-leere Mengen und A(x, y) eine Aussageform. Betrachten Sie die folgenden Aussagen:](/thumbs/53/30982501.jpg "1. Aufgabe [2 Punkte] Seien X, Y zwei nicht-leere Mengen und A(x, y) eine Aussageform. Betrachten Sie die folgenden Aussagen:") Klausur zur Analysis I svorschläge Universität Regensburg, Wintersemester 013/14 Prof. Dr. Bernd Ammann / Dr. Mihaela Pilca 0.0.014, Bearbeitungszeit: 3 Stunden 1. Aufgabe [ Punte] Seien X, Y zwei nicht-leere
Klausur zur Analysis I svorschläge Universität Regensburg, Wintersemester 013/14 Prof. Dr. Bernd Ammann / Dr. Mihaela Pilca 0.0.014, Bearbeitungszeit: 3 Stunden 1. Aufgabe [ Punte] Seien X, Y zwei nicht-leere
Konstruktion reeller Zahlen aus rationalen Zahlen
 Konstruktion reeller Zahlen aus rationalen Zahlen Wir nehmen an, daß der Körper der rationalen Zahlen bekannt ist. Genauer wollen wir annehmen: Gegeben ist eine Menge Q zusammen mit zwei Verknüpfungen
Konstruktion reeller Zahlen aus rationalen Zahlen Wir nehmen an, daß der Körper der rationalen Zahlen bekannt ist. Genauer wollen wir annehmen: Gegeben ist eine Menge Q zusammen mit zwei Verknüpfungen
Serie 4. Analysis D-BAUG Dr. Cornelia Busch FS 2015
 Analysis D-BAUG Dr. Cornelia Busch FS 05 Serie 4. Finden Sie die lokalen Extrema der Funktionen f : R R auf dem Einheitskreis S = {x, y R : x + y = } und geben Sie an, ob es sich um ein lokales Minimum
Analysis D-BAUG Dr. Cornelia Busch FS 05 Serie 4. Finden Sie die lokalen Extrema der Funktionen f : R R auf dem Einheitskreis S = {x, y R : x + y = } und geben Sie an, ob es sich um ein lokales Minimum
Das Singularitätentheorem von Hawking Teil 2
 Das Singularitätentheorem von Hawking Teil Jakob Hedicke 0.06.06 In diesem Vortrag werden wir den Beweis des Singularitätentheorems von Stephen Hawking vervollständigen. Im letzten Vortrag wurde bereits
Das Singularitätentheorem von Hawking Teil Jakob Hedicke 0.06.06 In diesem Vortrag werden wir den Beweis des Singularitätentheorems von Stephen Hawking vervollständigen. Im letzten Vortrag wurde bereits
C orthogonal und haben die Länge 1). Dann ist die Länge von w = x u + y v gegeben durch w 2 Def. = w,w =
. Dann ist die Länge von w = x u + y v gegeben durch w 2 Def. = w,w =") 1 v Die Länge Def. Sei (V,, ) ein Euklidscher Vektorraum. Für jeden Vektor v V heißt die Zahl v,v die Länge von v und wird v bezeichnet. Bemerkung. Die Länge des Vektors ist wohldefiniert, da nach Definition
1 v Die Länge Def. Sei (V,, ) ein Euklidscher Vektorraum. Für jeden Vektor v V heißt die Zahl v,v die Länge von v und wird v bezeichnet. Bemerkung. Die Länge des Vektors ist wohldefiniert, da nach Definition
Übungsblatt 2 - Analysis 2, Prof. G. Hemion
 Tutor: Martin Friesen, martin.friesen@gmx.de Übungsblatt 2 - Analysis 2, Prof. G. Hemion Um die hier gestellten Aufgaben zu lösen brauchen wir ein wenig Kentnisse über das Infimum bzw. Supremum einer Menge.
Tutor: Martin Friesen, martin.friesen@gmx.de Übungsblatt 2 - Analysis 2, Prof. G. Hemion Um die hier gestellten Aufgaben zu lösen brauchen wir ein wenig Kentnisse über das Infimum bzw. Supremum einer Menge.
Klausur zu Analysis II - Lösungen
 Mathematisches Institut der Heinrich-Heine-Universität Düsseldorf Dr. Axel Grünrock WS 1/11 11..11 Klausur zu Analysis II - Lösungen 1. Entscheiden Sie, ob die folgenden Aussagen richtig oder falsch sind.
Mathematisches Institut der Heinrich-Heine-Universität Düsseldorf Dr. Axel Grünrock WS 1/11 11..11 Klausur zu Analysis II - Lösungen 1. Entscheiden Sie, ob die folgenden Aussagen richtig oder falsch sind.
INGENIEURMATHEMATIK. 11. Differentialgeometrie. Sommersemester Prof. Dr. Gunar Matthies
 Mathematik und Naturwissenschaften Fachrichtung Mathematik, Institut für Numerische Mathematik INGENIEURMATHEMATIK 11. Differentialgeometrie Prof. Dr. Gunar Matthies Sommersemester 2016 G. Matthies Ingenieurmathematik
Mathematik und Naturwissenschaften Fachrichtung Mathematik, Institut für Numerische Mathematik INGENIEURMATHEMATIK 11. Differentialgeometrie Prof. Dr. Gunar Matthies Sommersemester 2016 G. Matthies Ingenieurmathematik
Wiederholung: lineare Abbildungen
 Wiederholung: lineare Abbildungen Def Es seien (V,+, ) und (U, +, ) zwei Vektorräume Eine Abbildung f : V U heißt linear, falls für alle Vektoren v 1, v 2 V und für jedes λ R gilt: (a) f (v 1 + v 2 ) =
Wiederholung: lineare Abbildungen Def Es seien (V,+, ) und (U, +, ) zwei Vektorräume Eine Abbildung f : V U heißt linear, falls für alle Vektoren v 1, v 2 V und für jedes λ R gilt: (a) f (v 1 + v 2 ) =
Thema: Klassifikation von 1-Mannigfaltigkeiten (mit Beweis) und von abgeschlossenen 2-Mannigfaltigkeiten (ohne Beweis)
 und von abgeschlossenen 2-Mannigfaltigkeiten (ohne Beweis)") Westfälische Wilhelms-Universität Münster Thema: Klassifikation von 1-Mannigfaltigkeiten (mit Beweis) und von abgeschlossenen 2-Mannigfaltigkeiten (ohne Beweis) Ausarbeitung im Rahmen des Seminars Einführung
Westfälische Wilhelms-Universität Münster Thema: Klassifikation von 1-Mannigfaltigkeiten (mit Beweis) und von abgeschlossenen 2-Mannigfaltigkeiten (ohne Beweis) Ausarbeitung im Rahmen des Seminars Einführung
= k 0+k 0 ( ). Wir addieren (0 k) zu den Seiten der Gleichung ( ): 0 = k 0.
. Wir addieren (0 k) zu den Seiten der Gleichung ( ): 0 = k 0.") Def 4 Eine Menge K mit zwei Abbildungen + : K K K und : K K K (heißen Addition und Multiplikation; wir werden a b bzw a+b statt (a,b), +(a,b) schreiben) ist ein kommutativer Ring, falls: (R1) (K, +) ist
Def 4 Eine Menge K mit zwei Abbildungen + : K K K und : K K K (heißen Addition und Multiplikation; wir werden a b bzw a+b statt (a,b), +(a,b) schreiben) ist ein kommutativer Ring, falls: (R1) (K, +) ist
13 Die trigonometrischen Funktionen
 13 Die trigonometrischen Funktionen Wir schreiben die Werte der komplexen Exponentialfunktion im Folgenden auch als e z = exp(z) (z C). Geometrisch definiert man üblicherweise die Werte der Winkelfunktion
13 Die trigonometrischen Funktionen Wir schreiben die Werte der komplexen Exponentialfunktion im Folgenden auch als e z = exp(z) (z C). Geometrisch definiert man üblicherweise die Werte der Winkelfunktion
Wiederholungsblatt Elementargeometrie LÖSUNGSSKIZZE
 Wiederholungsblatt Elementargeometrie im SS 01 bei Prof. Dr. S. Goette LÖSUNGSSKIZZE Die Lösungen unten enthalten teilweise keine vollständigen Rechnungen. Es sind aber alle wichtigen Zwischenergebnisse
Wiederholungsblatt Elementargeometrie im SS 01 bei Prof. Dr. S. Goette LÖSUNGSSKIZZE Die Lösungen unten enthalten teilweise keine vollständigen Rechnungen. Es sind aber alle wichtigen Zwischenergebnisse
Affine Geometrie (Einfachere, konstruktive Version)
") Affine Geometrie (Einfachere, konstruktive Version) Def. Affiner Raum der Dimension n über Körper K ist nach Definition K n. Bemerkung. Man könnte Theorie von affinen Raumen auch axiomatisch aufbauen mit
Affine Geometrie (Einfachere, konstruktive Version) Def. Affiner Raum der Dimension n über Körper K ist nach Definition K n. Bemerkung. Man könnte Theorie von affinen Raumen auch axiomatisch aufbauen mit
Analysis I. 4. Beispielklausur mit Lösungen
 Fachbereich Mathematik/Informatik Prof. Dr. H. Brenner Analysis I 4. Beispielklausur mit en Aufgabe 1. Definiere die folgenden (kursiv gedruckten) Begriffe. (1) Eine bijektive Abbildung f: M N. () Ein
Fachbereich Mathematik/Informatik Prof. Dr. H. Brenner Analysis I 4. Beispielklausur mit en Aufgabe 1. Definiere die folgenden (kursiv gedruckten) Begriffe. (1) Eine bijektive Abbildung f: M N. () Ein
Das heißt, Γ ist der Graph einer Funktion von d 1 Veränderlichen.
 Kapitel 2 Der Gaußsche Satz Partielle Differentialgleichung sind typischerweise auf beschränkten Gebieten des R d, d 1, zu lösen. Dabei sind die Eigenschaften dieser Gebiete von Bedeutung, insbesondere
Kapitel 2 Der Gaußsche Satz Partielle Differentialgleichung sind typischerweise auf beschränkten Gebieten des R d, d 1, zu lösen. Dabei sind die Eigenschaften dieser Gebiete von Bedeutung, insbesondere
Vorkurs Mathematik. Vorlesung 8. Angeordnete Körper
 Prof. Dr. H. Brenner Osnabrück WS 2009/2010 Vorkurs Mathematik Vorlesung 8 Angeordnete Körper Definition 8.1. Ein Körper K heißt angeordnet, wenn es eine totale Ordnung auf K gibt, die die beiden Eigenschaften
Prof. Dr. H. Brenner Osnabrück WS 2009/2010 Vorkurs Mathematik Vorlesung 8 Angeordnete Körper Definition 8.1. Ein Körper K heißt angeordnet, wenn es eine totale Ordnung auf K gibt, die die beiden Eigenschaften
Einführung in die Logik
 Einführung in die Logik Klaus Madlener und Roland Meyer 24. April 2013 Inhaltsverzeichnis 1 Aussagenlogik 1 1.1 Syntax................................. 1 1.2 Semantik............................... 3 1.3
Einführung in die Logik Klaus Madlener und Roland Meyer 24. April 2013 Inhaltsverzeichnis 1 Aussagenlogik 1 1.1 Syntax................................. 1 1.2 Semantik............................... 3 1.3
Definition 3.1. Sei A X. Unter einer offenen Überdeckung von A versteht man eine Familie (U i ) i I offener Mengen U i X mit U i
 i I offener Mengen U i X mit U i") 3 Kompaktheit In der Analysis I zeigt man, dass stetige Funktionen f : [a, b] R auf abgeschlossenen, beschränkten Intervallen [a, b] gleichmäßig stetig und beschränkt sind und dass sie ihr Supremum und
3 Kompaktheit In der Analysis I zeigt man, dass stetige Funktionen f : [a, b] R auf abgeschlossenen, beschränkten Intervallen [a, b] gleichmäßig stetig und beschränkt sind und dass sie ihr Supremum und
Analysis II (FS 2015): ZUSAMMENHÄNGENDE METRISCHE RÄUME
: ZUSAMMENHÄNGENDE METRISCHE RÄUME") Analysis II (FS 2015): ZUSAMMENHÄNGENDE METRISCHE RÄUME Dietmar A. Salamon ETH-Zürich 23. Februar 2015 1 Topologische Grundbegriffe Sei (X, d) ein metrischer Raum, d.h. X ist eine Menge und d : X X R ist
Analysis II (FS 2015): ZUSAMMENHÄNGENDE METRISCHE RÄUME Dietmar A. Salamon ETH-Zürich 23. Februar 2015 1 Topologische Grundbegriffe Sei (X, d) ein metrischer Raum, d.h. X ist eine Menge und d : X X R ist
1.6 Implizite Funktionen
 1 1.6 Implizite Funktionen Wir werden uns jetzt mit nichtlinearen Gleichungen beschäftigen, f(x) = 0, wobei f = (f 1,..., f m ) stetig differenzierbar auf einem Gebiet G R n und m < n ist. Dann hat man
1 1.6 Implizite Funktionen Wir werden uns jetzt mit nichtlinearen Gleichungen beschäftigen, f(x) = 0, wobei f = (f 1,..., f m ) stetig differenzierbar auf einem Gebiet G R n und m < n ist. Dann hat man
ALGEBRAISCHE VARIETÄTEN. gute Funktionen auf den offenen Mengen von V definieren. Dabei orientieren wir uns an folgenden Gegebenheiten: (1) Die
 Die") ALGEBRAISCHE VARIETÄTEN MARCO WEHNER UND MAXIMILIAN KREMER 1. Strukturgarben Sei V k n. Wir wollen nur gute Funktionen auf den offenen Mengen von V definieren. Dabei orientieren wir uns an folgenden Gegebenheiten:
ALGEBRAISCHE VARIETÄTEN MARCO WEHNER UND MAXIMILIAN KREMER 1. Strukturgarben Sei V k n. Wir wollen nur gute Funktionen auf den offenen Mengen von V definieren. Dabei orientieren wir uns an folgenden Gegebenheiten:
Konstruktion der reellen Zahlen
 Konstruktion der reellen Zahlen Zur Wiederholung: Eine Menge K (mit mindestens zwei Elementen) heißt Körper, wenn für beliebige Elemente x, y K eindeutig eine Summe x+y K und ein Produkt x y K definiert
Konstruktion der reellen Zahlen Zur Wiederholung: Eine Menge K (mit mindestens zwei Elementen) heißt Körper, wenn für beliebige Elemente x, y K eindeutig eine Summe x+y K und ein Produkt x y K definiert
Abbildung 10.1: Das Bild zu Beispiel 10.1
 Analysis 3, Woche Mannigfaltigkeiten I. Definition einer Mannigfaltigkeit Die Definition einer Mannigfaltigkeit braucht den Begriff Diffeomorphismus, den wir in Definition 9.5 festgelegt haben. Seien U,
Analysis 3, Woche Mannigfaltigkeiten I. Definition einer Mannigfaltigkeit Die Definition einer Mannigfaltigkeit braucht den Begriff Diffeomorphismus, den wir in Definition 9.5 festgelegt haben. Seien U,
5 Stetigkeit und Differenzierbarkeit
 5 Stetigkeit und Differenzierbarkeit 5.1 Stetigkeit und Grenzwerte von Funktionen f(x 0 ) x 0 Graph einer stetigen Funktion. Analysis I TUHH, Winter 2006/2007 Armin Iske 127 Häufungspunkt und Abschluss.
5 Stetigkeit und Differenzierbarkeit 5.1 Stetigkeit und Grenzwerte von Funktionen f(x 0 ) x 0 Graph einer stetigen Funktion. Analysis I TUHH, Winter 2006/2007 Armin Iske 127 Häufungspunkt und Abschluss.
Ebene Elementargeometrie
 Ebene Elementargeometrie Im Folgenden unterscheiden wir neben Definitionen (Namensgebung) und Sätzen (nachweisbaren Aussagen) so genannte Axiome. Axiome stellen der Anschauung entnommene Aussagen dar,
Ebene Elementargeometrie Im Folgenden unterscheiden wir neben Definitionen (Namensgebung) und Sätzen (nachweisbaren Aussagen) so genannte Axiome. Axiome stellen der Anschauung entnommene Aussagen dar,
Konvergenz, Filter und der Satz von Tychonoff
 Abschnitt 4 Konvergenz, Filter und der Satz von Tychonoff In metrischen Räumen kann man topologische Begriffe wie Stetigkeit, Abschluss, Kompaktheit auch mit Hilfe von Konvergenz von Folgen charakterisieren.
Abschnitt 4 Konvergenz, Filter und der Satz von Tychonoff In metrischen Räumen kann man topologische Begriffe wie Stetigkeit, Abschluss, Kompaktheit auch mit Hilfe von Konvergenz von Folgen charakterisieren.
Überlagerung I. Überlagerung für z z 2 : komplexe Quadratwurzel. Christoph Schweigert, Garben p.1/19
 Überlagerung I Überlagerung für z z 2 : komplexe Quadratwurzel Christoph Schweigert, Garben p.1/19 Überlagerung II Überlagerung für z z 3 : komplexe dritte Wurzel Christoph Schweigert, Garben p.2/19 Überlagerung
Überlagerung I Überlagerung für z z 2 : komplexe Quadratwurzel Christoph Schweigert, Garben p.1/19 Überlagerung II Überlagerung für z z 3 : komplexe dritte Wurzel Christoph Schweigert, Garben p.2/19 Überlagerung
Konvexe Funktionen und Legendre-Transformation
 Konvexe Funktionen und Legendre-Transformation Def. Eine Teilmenge A R n heißt konvex, wenn sie mit je zwei Punkten x, y auch stets deren Verbindungsstrecke xy = {x +t xy 0 t 1} = {(1 t)x +ty 0 t 1} enthält.
Konvexe Funktionen und Legendre-Transformation Def. Eine Teilmenge A R n heißt konvex, wenn sie mit je zwei Punkten x, y auch stets deren Verbindungsstrecke xy = {x +t xy 0 t 1} = {(1 t)x +ty 0 t 1} enthält.
ε δ Definition der Stetigkeit.
 ε δ Definition der Stetigkeit. Beweis a) b): Annahme: ε > 0 : δ > 0 : x δ D : x δ x 0 < δ f (x δ f (x 0 ) ε Die Wahl δ = 1 n (n N) generiert eine Folge (x n) n N, x n D mit x n x 0 < 1 n f (x n ) f (x
ε δ Definition der Stetigkeit. Beweis a) b): Annahme: ε > 0 : δ > 0 : x δ D : x δ x 0 < δ f (x δ f (x 0 ) ε Die Wahl δ = 1 n (n N) generiert eine Folge (x n) n N, x n D mit x n x 0 < 1 n f (x n ) f (x
6 Komplexe Integration
 6 Komplexe Integration Ziel: Berechne für komplexe Funktion f : D W C Integral der Form f(z)dz =? wobei D C ein Weg im Definitionsbereich von f. Fragen: Wie ist ein solches komplexes Integral sinnvollerweise
6 Komplexe Integration Ziel: Berechne für komplexe Funktion f : D W C Integral der Form f(z)dz =? wobei D C ein Weg im Definitionsbereich von f. Fragen: Wie ist ein solches komplexes Integral sinnvollerweise
4 Messbare Funktionen
 4 Messbare Funktionen 4.1 Definitionen und Eigenschaften Definition 4.1. Seien X eine beliebige nichtleere Menge, M P(X) eine σ-algebra in X und µ ein Maß auf M. Das Paar (X, M) heißt messbarer Raum und
4 Messbare Funktionen 4.1 Definitionen und Eigenschaften Definition 4.1. Seien X eine beliebige nichtleere Menge, M P(X) eine σ-algebra in X und µ ein Maß auf M. Das Paar (X, M) heißt messbarer Raum und
Serie 8 - Parametrisierte Kurven
 Analysis D-BAUG Dr Meike Akveld HS 05 Serie 8 - Parametrisierte Kurven Geben Sie für die folgenden Bewegungen eines Punktes jeweils eine parametrisierte Darstellung I [0, ] R xt, t yt an Lösung a Geradlinige
Analysis D-BAUG Dr Meike Akveld HS 05 Serie 8 - Parametrisierte Kurven Geben Sie für die folgenden Bewegungen eines Punktes jeweils eine parametrisierte Darstellung I [0, ] R xt, t yt an Lösung a Geradlinige
Lösungen der Übungsaufgaben von Kapitel 3
 Analysis I Ein Lernbuch für den sanften Wechsel von der Schule zur Uni 1 Lösungen der Übungsaufgaben von Kapitel 3 zu 3.1 3.1.1 Bestimmen Sie den Abschluss, den offenen Kern und den Rand folgender Teilmengen
Analysis I Ein Lernbuch für den sanften Wechsel von der Schule zur Uni 1 Lösungen der Übungsaufgaben von Kapitel 3 zu 3.1 3.1.1 Bestimmen Sie den Abschluss, den offenen Kern und den Rand folgender Teilmengen
3.6 Einführung in die Vektorrechnung
 3.6 Einführung in die Vektorrechnung Inhaltsverzeichnis Definition des Vektors 2 2 Skalare Multiplikation und Kehrvektor 4 3 Addition und Subtraktion von Vektoren 5 3. Addition von zwei Vektoren..................................
3.6 Einführung in die Vektorrechnung Inhaltsverzeichnis Definition des Vektors 2 2 Skalare Multiplikation und Kehrvektor 4 3 Addition und Subtraktion von Vektoren 5 3. Addition von zwei Vektoren..................................
Konvergenz im quadratischen Mittel und Parsevalsche Gleichung
 Konvergenz im quadratischen Mittel und Parsevalsche Gleichung Skript zum Vortrag im Proseminar Analysis bei Prof Dr Picard, gehalten von Helena Malinowski In vorhergehenden Vorträgen und dazugehörigen
Konvergenz im quadratischen Mittel und Parsevalsche Gleichung Skript zum Vortrag im Proseminar Analysis bei Prof Dr Picard, gehalten von Helena Malinowski In vorhergehenden Vorträgen und dazugehörigen
Cauchy-Folgen und Kompaktheit. 1 Cauchy-Folgen und Beschränktheit
 Vortrag zum Seminar zur Analysis, 10.05.2010 Michael Engeländer, Jonathan Fell Dieser Vortrag stellt als erstes einige Sätze zu Cauchy-Folgen auf allgemeinen metrischen Räumen vor. Speziell wird auch das
Vortrag zum Seminar zur Analysis, 10.05.2010 Michael Engeländer, Jonathan Fell Dieser Vortrag stellt als erstes einige Sätze zu Cauchy-Folgen auf allgemeinen metrischen Räumen vor. Speziell wird auch das
Analysis 1, Woche 2. Reelle Zahlen. 2.1 Anordnung. Definition 2.1 Man nennt eine Anordnung für K, wenn: 1. Für jeden a K gilt a a (Reflexivität).
.") Analysis 1, Woche 2 Reelle Zahlen 2.1 Anordnung Definition 2.1 Man nennt eine Anordnung für K, wenn: 1. Für jeden a K gilt a a (Reflexivität). 2. Für jeden a, b K mit a b und b a gilt a = b (Antisymmetrie).
Analysis 1, Woche 2 Reelle Zahlen 2.1 Anordnung Definition 2.1 Man nennt eine Anordnung für K, wenn: 1. Für jeden a K gilt a a (Reflexivität). 2. Für jeden a, b K mit a b und b a gilt a = b (Antisymmetrie).
Komplexe Zahlen und konforme Abbildungen
 Kapitel 1 Komplexe Zahlen und konforme Abbildungen 1.0 Geometrie der komplexen Zahlen Die Menge C der komplexen Zahlen, lässt sich mithilfe der bijektiven Abbildung C := {x + iy : x,y R}, C z = x + iy
Kapitel 1 Komplexe Zahlen und konforme Abbildungen 1.0 Geometrie der komplexen Zahlen Die Menge C der komplexen Zahlen, lässt sich mithilfe der bijektiven Abbildung C := {x + iy : x,y R}, C z = x + iy
Kapitel 5 Untermannigfaltigkeiten. 5.1 Glatte Flächen in R 3
 Kapitel 5 Untermannigfaltigkeiten 5.1 Glatte Flächen in R 3 Bisher haben wir unter einem glatten Weg im R n stets eine differenzierbare Abbildung γ:i R n, definiert auf einem Intervall I R, verstanden.
Kapitel 5 Untermannigfaltigkeiten 5.1 Glatte Flächen in R 3 Bisher haben wir unter einem glatten Weg im R n stets eine differenzierbare Abbildung γ:i R n, definiert auf einem Intervall I R, verstanden.
Gleitspiegelung und Verkettungen von Spiegelung und Parallelverschiebung
 Gleitspiegelung und Verkettungen von Spiegelung und Parallelverschiebung Def. Eine Gleitspiegelung ist eine Spiegelung an einer Geraden (Spiegelachse) verknüpft mit einer Translation parallel zu dieser
Gleitspiegelung und Verkettungen von Spiegelung und Parallelverschiebung Def. Eine Gleitspiegelung ist eine Spiegelung an einer Geraden (Spiegelachse) verknüpft mit einer Translation parallel zu dieser
Kompaktheit und Überdeckungen. 1 Überdeckungskompaktheit
 Vortrag zum Proseminar zur Analysis, 17.05.2010 Min Ge, Niklas Fischer In diesem Vortrag werden die Eigenschaften von kompakten, metrischen Räumen vertieft. Unser Ziel ist es Techniken zu erlernen, um
Vortrag zum Proseminar zur Analysis, 17.05.2010 Min Ge, Niklas Fischer In diesem Vortrag werden die Eigenschaften von kompakten, metrischen Räumen vertieft. Unser Ziel ist es Techniken zu erlernen, um
n=1 a n mit reellen Zahlen a n einen
 4 Unendliche Reihen 4. Definition und Beispiele Ein altes Problem der Analysis ist es, einer Reihe mit reellen Zahlen einen Wert zuzuordnen. Ein typisches Beispiel ist die unendliche Reihe + +..., die
4 Unendliche Reihen 4. Definition und Beispiele Ein altes Problem der Analysis ist es, einer Reihe mit reellen Zahlen einen Wert zuzuordnen. Ein typisches Beispiel ist die unendliche Reihe + +..., die
(x, x + y 2, x y 2 + z 3. = e x sin y. sin y. Nach dem Umkehrsatz besitzt f dann genau auf der Menge
 ÜBUNGSBLATT 0 LÖSUNGEN MAT/MAT3 ANALYSIS II FRÜHJAHRSSEMESTER 0 PROF DR CAMILLO DE LELLIS Aufgabe Finden Sie für folgende Funktionen jene Punkte im Bildraum, in welchen sie sich lokal umkehren lassen,
ÜBUNGSBLATT 0 LÖSUNGEN MAT/MAT3 ANALYSIS II FRÜHJAHRSSEMESTER 0 PROF DR CAMILLO DE LELLIS Aufgabe Finden Sie für folgende Funktionen jene Punkte im Bildraum, in welchen sie sich lokal umkehren lassen,
x 2 + y 2 = f x y = λ
 Lineare Abbildungen Def Es seien (V 1,+, ) und (V 2,+, ) zwei Vektorräume Eine Abbildung f : V 1 V 2 heißt linear, falls für alle Vektoren u,v V 1 und für jedes λ R gilt: f (u + v) = f (u) + f (v), f (λu)
Lineare Abbildungen Def Es seien (V 1,+, ) und (V 2,+, ) zwei Vektorräume Eine Abbildung f : V 1 V 2 heißt linear, falls für alle Vektoren u,v V 1 und für jedes λ R gilt: f (u + v) = f (u) + f (v), f (λu)
Kapitel 8 - Kompakte Räume
 Kapitel 8 - Kompakte Räume Ein Vortrag von Philipp Dittrich nach B.v.Querenburg: Mengentheoretische Topologie Inhalt 8.1 Definition Kompaktheit....................... 2 Beispiel - das Intervall (0,1).....................
Kapitel 8 - Kompakte Räume Ein Vortrag von Philipp Dittrich nach B.v.Querenburg: Mengentheoretische Topologie Inhalt 8.1 Definition Kompaktheit....................... 2 Beispiel - das Intervall (0,1).....................
Billard auf polygonförmigen Tischen
 Billard auf polygonförmigen Tischen Myriam Freidinger 1 Der Fagnano Billardstrahl im Dreieck Lemma 1. Sei ABC ein spitzwinkliges Dreieck und P,Q und R die Basispunkte der Höhen von A,B und C, dann beschreibt
Billard auf polygonförmigen Tischen Myriam Freidinger 1 Der Fagnano Billardstrahl im Dreieck Lemma 1. Sei ABC ein spitzwinkliges Dreieck und P,Q und R die Basispunkte der Höhen von A,B und C, dann beschreibt
Mathematik III. Vorlesung 74. Folgerungen aus dem Satz von Fubini. (( 1 3 x3 1 2 x2 y +2y 3 x) 1 2)dy. ( y +2y y +4y3 )dy
 1 2)dy. ( y +2y y +4y3 )dy") Prof. Dr. H. Brenner Osnabrück WS 2010/2011 Mathematik III Vorlesung 74 Folgerungen aus dem Satz von Fubini Beispiel 74.1. Wir wollen das Integral der Funktion f :R 2 R, (x,y) x 2 xy +2y 3, über dem Rechteck
Prof. Dr. H. Brenner Osnabrück WS 2010/2011 Mathematik III Vorlesung 74 Folgerungen aus dem Satz von Fubini Beispiel 74.1. Wir wollen das Integral der Funktion f :R 2 R, (x,y) x 2 xy +2y 3, über dem Rechteck
f(x nk ) = lim y nk ) = lim Bemerkung 2.14 Der Satz stimmt nicht mehr, wenn D nicht abgeschlossen oder nicht beschränkt ist, wie man z.b.
 = lim y nk ) = lim Bemerkung 2.14 Der Satz stimmt nicht mehr, wenn D nicht abgeschlossen oder nicht beschränkt ist, wie man z.b.") Proposition.13 Sei f : D R stetig und D = [a, b] R. Dann ist f(d) beschränkt. Außerdem nimmt f sein Maximum und Minimum auf D an, d.h. es gibt x max D und ein x min D, so dass f(x max ) = sup f(d) und
Proposition.13 Sei f : D R stetig und D = [a, b] R. Dann ist f(d) beschränkt. Außerdem nimmt f sein Maximum und Minimum auf D an, d.h. es gibt x max D und ein x min D, so dass f(x max ) = sup f(d) und
Kapitel 5. Die trigonometrischen Funktionen Die komplexen Zahlen Folgen und Reihen in C
 Kapitel 5. Die trigonometrischen Funktionen 5.1. Die komplexen Zahlen 5.. Folgen und Reihen in C 5.10. Definition. Eine Folge (c n n N komplexer Zahlen heißt konvergent gegen c C, falls zu jedem ε > 0
Kapitel 5. Die trigonometrischen Funktionen 5.1. Die komplexen Zahlen 5.. Folgen und Reihen in C 5.10. Definition. Eine Folge (c n n N komplexer Zahlen heißt konvergent gegen c C, falls zu jedem ε > 0
Mathematik II für Studierende der Informatik. Wirtschaftsinformatik (Analysis und lineare Algebra) im Sommersemester 2016
 im Sommersemester 2016") und Wirtschaftsinformatik (Analysis und lineare Algebra) im Sommersemester 2016 5. Juni 2016 Definition 5.21 Ist a R, a > 0 und a 1, so bezeichnet man die Umkehrfunktion der Exponentialfunktion x a x als
und Wirtschaftsinformatik (Analysis und lineare Algebra) im Sommersemester 2016 5. Juni 2016 Definition 5.21 Ist a R, a > 0 und a 1, so bezeichnet man die Umkehrfunktion der Exponentialfunktion x a x als
Übungsaufgaben zur Vorlesung ANALYSIS I (WS 12/13) Lösungsvorschlag Serie 12
 Lösungsvorschlag Serie 12") Humboldt-Universität zu Berlin Institut für Mathematik Prof. A. Griewank Ph.D.; Dr. A. Hoffkamp; Dipl.Math. T.Bosse; Dipl.Math. L. Jansen Übungsaufgaben zur Vorlesung ANALYSIS I (WS 2/3) Lösungsvorschlag
Humboldt-Universität zu Berlin Institut für Mathematik Prof. A. Griewank Ph.D.; Dr. A. Hoffkamp; Dipl.Math. T.Bosse; Dipl.Math. L. Jansen Übungsaufgaben zur Vorlesung ANALYSIS I (WS 2/3) Lösungsvorschlag
Satz 7. A sei eine Teilmenge des nichttrivialen Vektorraums (V,+, ). Dann sind die folgende Aussagen äquivalent.
. Dann sind die folgende Aussagen äquivalent.") Definition der Basis Def. Es sei (V,+, ) ein nichttrivialer Vektorraum. Die Menge A V heißt eine Basis-Menge, falls sie (a) linear unabhängig ist und (b) span(a) = V. Satz 7. A sei eine Teilmenge des nichttrivialen
Definition der Basis Def. Es sei (V,+, ) ein nichttrivialer Vektorraum. Die Menge A V heißt eine Basis-Menge, falls sie (a) linear unabhängig ist und (b) span(a) = V. Satz 7. A sei eine Teilmenge des nichttrivialen
Etwas Topologie. Handout zur Vorlesung Semi-Riemannsche Geometrie, SS 2004 Dr. Bernd Ammann
 Etwas Topologie Handout zur Vorlesung Semi-Riemannsche Geometrie, SS 2004 Dr. Bernd Ammann Literatur Abraham, Marsden, Foundations of Mechanics, Addison Wesley 1978, Seiten 3 17 Definition. Ein topologischer
Etwas Topologie Handout zur Vorlesung Semi-Riemannsche Geometrie, SS 2004 Dr. Bernd Ammann Literatur Abraham, Marsden, Foundations of Mechanics, Addison Wesley 1978, Seiten 3 17 Definition. Ein topologischer
8 Die Riemannsche Zahlenkugel
 8 Die Riemannsche Zahlenkugel Wir untersuchen zunächst Geraden- und Kreisgleichungen in der komplexen Ebene C = R 2. Geradengleichungen Die Parameterdarstellung einer Geraden durch zwei Punkte z 1 z 2
8 Die Riemannsche Zahlenkugel Wir untersuchen zunächst Geraden- und Kreisgleichungen in der komplexen Ebene C = R 2. Geradengleichungen Die Parameterdarstellung einer Geraden durch zwei Punkte z 1 z 2
Zahlen und metrische Räume
 Zahlen und metrische Räume Natürliche Zahlen : Die natürlichen Zahlen sind die grundlegendste Zahlenmenge, da man diese Menge für das einfache Zählen verwendet. N = {1, 2, 3, 4,...} Ganze Zahlen : Aus
Zahlen und metrische Räume Natürliche Zahlen : Die natürlichen Zahlen sind die grundlegendste Zahlenmenge, da man diese Menge für das einfache Zählen verwendet. N = {1, 2, 3, 4,...} Ganze Zahlen : Aus
Topologische Aspekte: Eine kurze Zusammenfassung
 Kapitel 1 Topologische Aspekte: Eine kurze Zusammenfassung Wer das erste Knopfloch verfehlt, kommt mit dem Zuknöpfen nicht zu Rande J. W. Goethe In diesem Kapitel bringen wir die Begriffe Umgebung, Konvergenz,
Kapitel 1 Topologische Aspekte: Eine kurze Zusammenfassung Wer das erste Knopfloch verfehlt, kommt mit dem Zuknöpfen nicht zu Rande J. W. Goethe In diesem Kapitel bringen wir die Begriffe Umgebung, Konvergenz,
1 Angeordnete Körper. 1.1 Anordnungen und Positivbereiche
 1 1 Angeordnete Körper 1.1 Anordnungen und Positivbereiche Definition 1.1. Eine zweistellige Relation auf einer Menge heißt partielle Ordnung, falls für alle Elemente a, b, c der Menge gilt: (i) a a (ii)
1 1 Angeordnete Körper 1.1 Anordnungen und Positivbereiche Definition 1.1. Eine zweistellige Relation auf einer Menge heißt partielle Ordnung, falls für alle Elemente a, b, c der Menge gilt: (i) a a (ii)
Flächen und ihre Krümmungen
 Flächen und ihre Krümmungen Teilnehmer: Levi Borodenko Anna Heinrich Jochen Jacobs Robert Jendersie Tanja Lappe Manuel Radatz Maximilian Rogge Käthe-Kollwitz-Oberschule, Berlin Käthe-Kollwitz-Oberschule,
Flächen und ihre Krümmungen Teilnehmer: Levi Borodenko Anna Heinrich Jochen Jacobs Robert Jendersie Tanja Lappe Manuel Radatz Maximilian Rogge Käthe-Kollwitz-Oberschule, Berlin Käthe-Kollwitz-Oberschule,
15 Hauptsätze über stetige Funktionen
 15 Hauptsätze über stetige Funktionen 15.1 Extremalsatz von Weierstraß 15.2 Zwischenwertsatz für stetige Funktionen 15.3 Nullstellensatz von Bolzano 15.5 Stetige Funktionen sind intervalltreu 15.6 Umkehrfunktionen
15 Hauptsätze über stetige Funktionen 15.1 Extremalsatz von Weierstraß 15.2 Zwischenwertsatz für stetige Funktionen 15.3 Nullstellensatz von Bolzano 15.5 Stetige Funktionen sind intervalltreu 15.6 Umkehrfunktionen
3. Zusammenhang. 22 Andreas Gathmann
 22 Andreas Gathmann 3. Zusammenhang Eine der anschaulichsten Eigenschaften eines topologischen Raumes ist wahrscheinlich, ob er zusammenhängend ist oder aus mehreren Teilen besteht. Wir wollen dieses Konzept
22 Andreas Gathmann 3. Zusammenhang Eine der anschaulichsten Eigenschaften eines topologischen Raumes ist wahrscheinlich, ob er zusammenhängend ist oder aus mehreren Teilen besteht. Wir wollen dieses Konzept
20.4 Gleichmäßige Konvergenz von Folgen und Reihen von Funktionen
 20 Gleichmäßige Konvergenz für Folgen und Reihen von Funktionen 20.1 Folgen und Reihen von Funktionen 20.3 Die Supremumsnorm 20.4 Gleichmäßige Konvergenz von Folgen und Reihen von Funktionen 20.7 Das Cauchy-Kriterium
20 Gleichmäßige Konvergenz für Folgen und Reihen von Funktionen 20.1 Folgen und Reihen von Funktionen 20.3 Die Supremumsnorm 20.4 Gleichmäßige Konvergenz von Folgen und Reihen von Funktionen 20.7 Das Cauchy-Kriterium
Kapitel VI. Euklidische Geometrie
 Kapitel VI. Euklidische Geometrie 1 Abstände und Lote Wiederholung aus Kapitel IV. Wir versehen R n mit dem Standard Skalarprodukt x 1 y 1.,. := x 1 y 1 +... + x n y n x n y n Es gilt für u, v, w R n und
Kapitel VI. Euklidische Geometrie 1 Abstände und Lote Wiederholung aus Kapitel IV. Wir versehen R n mit dem Standard Skalarprodukt x 1 y 1.,. := x 1 y 1 +... + x n y n x n y n Es gilt für u, v, w R n und
Stetigkeit von Funktionen
 9 Stetigkeit von Funktionen Definition 9.1 : Sei D R oder C und f : D R, C. f stetig in a D : ε > 0 δ > 0 mit f(z) f(a) < ε für alle z D, z a < δ. f stetig auf D : f stetig in jedem Punkt a D. f(a) ε a
9 Stetigkeit von Funktionen Definition 9.1 : Sei D R oder C und f : D R, C. f stetig in a D : ε > 0 δ > 0 mit f(z) f(a) < ε für alle z D, z a < δ. f stetig auf D : f stetig in jedem Punkt a D. f(a) ε a
11 Logarithmus und allgemeine Potenzen
 Logarithmus und allgemeine Potenzen Bevor wir uns mit den Eigenschaften von Umkehrfunktionen, und insbesondere mit der Umkehrfunktion der Eponentialfunktion ep : R R + beschäftigen, erinnern wir an den
Logarithmus und allgemeine Potenzen Bevor wir uns mit den Eigenschaften von Umkehrfunktionen, und insbesondere mit der Umkehrfunktion der Eponentialfunktion ep : R R + beschäftigen, erinnern wir an den
Konvexe Mengen. Def. Eine Teilmenge A R n heißt konvex, wenn sie mit je zwei Punkten x,y auch stets deren Verbindungsstrecke
 Konvexe Mengen Def. Eine Teilmenge A R n heißt konvex, wenn sie mit je zwei Punkten x,y auch stets deren Verbindungsstrecke xy = {x + t xy 0 t 1} = {(1 t)x + ty 0 t 1} enthält. konvex nicht konvex Lemma
Konvexe Mengen Def. Eine Teilmenge A R n heißt konvex, wenn sie mit je zwei Punkten x,y auch stets deren Verbindungsstrecke xy = {x + t xy 0 t 1} = {(1 t)x + ty 0 t 1} enthält. konvex nicht konvex Lemma
Ist C eine Kurve mit Anfangspunkt a und Endpunkt b und f eine stetig differenzierbare Funktion, grad f( r ) d r = f( b) f( a).
 d r = f( b) f( a).") KAPITEL 5. MEHRDIMENSIONALE INTERATION. Berechnung Integralsätze in R Hauptsatz für Kurvenintegrale wegunabhängig radientenfeld Integrabilitätsbedingung Hauptsatz für Kurvenintegrale a b Ist eine Kurve
KAPITEL 5. MEHRDIMENSIONALE INTERATION. Berechnung Integralsätze in R Hauptsatz für Kurvenintegrale wegunabhängig radientenfeld Integrabilitätsbedingung Hauptsatz für Kurvenintegrale a b Ist eine Kurve
Neilsche Parabel. Wieso ist die Neilsche Parabel N = { (x,y) R 2 x 3 = y 2} keine UMF von R 2?
 R 2 x 3 = y 2} keine UMF von R 2?") Inhalt vom 23.6. In dieser Übung soll zum einen die Parametrisierung von Flächen als auch die Berechnung von Flächeninhalten im Mittelpunkt stehen. Bevor wir jedoch damit anfangen, wollen wir noch beantworten,
Inhalt vom 23.6. In dieser Übung soll zum einen die Parametrisierung von Flächen als auch die Berechnung von Flächeninhalten im Mittelpunkt stehen. Bevor wir jedoch damit anfangen, wollen wir noch beantworten,
Vorlesungsskript Geometrie SS Uwe Semmelmann
 Vorlesungsskript Geometrie SS 212 Uwe Semmelmann Die Vorlesung basiert auf dem Buch Elementare Differentialgeometrie von Christian Bär, de Gruyter, 2. Auflage, 21. KAPITEL 1 Kurventheorie 1. Kurven in
Vorlesungsskript Geometrie SS 212 Uwe Semmelmann Die Vorlesung basiert auf dem Buch Elementare Differentialgeometrie von Christian Bär, de Gruyter, 2. Auflage, 21. KAPITEL 1 Kurventheorie 1. Kurven in
2. Stetigkeit und Differenzierbarkeit
 2. Stetigkeit Differenzierbarkeit 9 2. Stetigkeit Differenzierbarkeit Wir wollen uns nun komplexen Funktionen zuwenden dabei zunächst die ersten in der Analysis betrachteten Eigenschaften untersuchen,
2. Stetigkeit Differenzierbarkeit 9 2. Stetigkeit Differenzierbarkeit Wir wollen uns nun komplexen Funktionen zuwenden dabei zunächst die ersten in der Analysis betrachteten Eigenschaften untersuchen,
Achsen- und punktsymmetrische Figuren
 Achsensymmetrie Der Punkt P und sein Bildpunkt P sind symmetrisch bzgl. der Achse s, wenn ihre Verbindungsstrecke [PP ] senkrecht auf der Achse a steht und von dieser halbiert wird. Zueinander symmetrische......strecken
Achsensymmetrie Der Punkt P und sein Bildpunkt P sind symmetrisch bzgl. der Achse s, wenn ihre Verbindungsstrecke [PP ] senkrecht auf der Achse a steht und von dieser halbiert wird. Zueinander symmetrische......strecken
Mathematik für Anwender II
 Prof. Dr. H. Brenner Osnabrück SS 2012 Mathematik für Anwender II Vorlesung 32 Metrische Räume Euklidische Räume besitzen nach Definition ein Skalarprodukt. Darauf aufbauend kann man einfach die Norm eines
Prof. Dr. H. Brenner Osnabrück SS 2012 Mathematik für Anwender II Vorlesung 32 Metrische Räume Euklidische Räume besitzen nach Definition ein Skalarprodukt. Darauf aufbauend kann man einfach die Norm eines
55 Lokale Extrema unter Nebenbedingungen
 55 Lokale Extrema unter Nebenbedingungen Sei f : O R mit O R n differenzierbar. Notwendige Bescheinigung für ein lokales Extremum in p 0 ist dann die Bedingung f = 0 (siehe 52.4 und 49.14). Ist nun F :
55 Lokale Extrema unter Nebenbedingungen Sei f : O R mit O R n differenzierbar. Notwendige Bescheinigung für ein lokales Extremum in p 0 ist dann die Bedingung f = 0 (siehe 52.4 und 49.14). Ist nun F :
Analysis 1, Woche 3. Komplexe Zahlen I. 3.1 Etwas Imaginäres
 Analysis, Woche 3 Komplexe Zahlen I A 3. Etwas Imaginäres Zusätzlich zu den reellen Zahlen führen wir das Symbol i ein und wir vereinbaren: i. Wir möchten die reellen Zahlen erweitern mit i. Das heißt,
Analysis, Woche 3 Komplexe Zahlen I A 3. Etwas Imaginäres Zusätzlich zu den reellen Zahlen führen wir das Symbol i ein und wir vereinbaren: i. Wir möchten die reellen Zahlen erweitern mit i. Das heißt,
Thema 4 Limiten und Stetigkeit von Funktionen
 Thema 4 Limiten und Stetigkeit von Funktionen Wir betrachten jetzt Funktionen zwischen geeigneten Punktmengen. Dazu wiederholen wir einige grundlegende Begriffe und Schreibweisen aus der Mengentheorie.
Thema 4 Limiten und Stetigkeit von Funktionen Wir betrachten jetzt Funktionen zwischen geeigneten Punktmengen. Dazu wiederholen wir einige grundlegende Begriffe und Schreibweisen aus der Mengentheorie.
x, y 2 f(x)g(x) dµ(x). Es ist leicht nachzuprüfen, dass die x 2 setzen. Dann liefert (5.1) n=1 x ny n bzw. f, g = Ω
g(x) dµ(x). Es ist leicht nachzuprüfen, dass die x 2 setzen. Dann liefert (5.1) n=1 x ny n bzw. f, g = Ω") 5. Hilberträume Definition 5.1. Sei H ein komplexer Vektorraum. Eine Abbildung, : H H C heißt Skalarprodukt (oder inneres Produkt) auf H, wenn für alle x, y, z H, α C 1) x, x 0 und x, x = 0 x = 0; ) x,
5. Hilberträume Definition 5.1. Sei H ein komplexer Vektorraum. Eine Abbildung, : H H C heißt Skalarprodukt (oder inneres Produkt) auf H, wenn für alle x, y, z H, α C 1) x, x 0 und x, x = 0 x = 0; ) x,
7. Die Brownsche Bewegung
 7. DIE BROWNSCHE BEWEGUNG 7 5 5 50 00 50 200 250 0 5 20 Abbildung 7.: Pfad einer Brownschen Bewegung 7. Die Brownsche Bewegung Definition 7.. Ein cadlag stochastischer Prozess {W t } mit W 0 = 0, unabhängigen
7. DIE BROWNSCHE BEWEGUNG 7 5 5 50 00 50 200 250 0 5 20 Abbildung 7.: Pfad einer Brownschen Bewegung 7. Die Brownsche Bewegung Definition 7.. Ein cadlag stochastischer Prozess {W t } mit W 0 = 0, unabhängigen
2. Stetige Abbildungen
 4 Andreas Gathmann 2. Stetige Abbildungen Nachdem wir im letzten Kapitel topologische Räume eingeführt haben, wollen wir nun Abbildungen zwischen solchen Räumen untersuchen. Wie schon in der Einleitung
4 Andreas Gathmann 2. Stetige Abbildungen Nachdem wir im letzten Kapitel topologische Räume eingeführt haben, wollen wir nun Abbildungen zwischen solchen Räumen untersuchen. Wie schon in der Einleitung
Definition 1.2. Eine kontinuierliche Gruppe mit einer endlichen Menge an Parametern heißt endliche kontinuierliche Gruppe. x cosξ sinξ y sinξ cosξ
 8 Gruppentheorie 1 Lie-Gruppen 1.1 Endliche kontinuierliche Gruppe Definition 1.1. Eine Menge G mit einer Verknüpfung m heißt Gruppe, falls folgende Axiome erfüllt sind: (i) Die Operation m, genannt Multiplikation,
8 Gruppentheorie 1 Lie-Gruppen 1.1 Endliche kontinuierliche Gruppe Definition 1.1. Eine Menge G mit einer Verknüpfung m heißt Gruppe, falls folgende Axiome erfüllt sind: (i) Die Operation m, genannt Multiplikation,
Darstellungsformeln für die Lösung von parabolischen Differentialgleichungen
 Kapitel 8 Darstellungsformeln für die Lösung von parabolischen Differentialgleichungen Wir hatten im Beispiel 5. gesehen, dass die Wärmeleitungsgleichung t u u = f auf Ω (0, ) (8.1) eine parabolische Differentialgleichung
Kapitel 8 Darstellungsformeln für die Lösung von parabolischen Differentialgleichungen Wir hatten im Beispiel 5. gesehen, dass die Wärmeleitungsgleichung t u u = f auf Ω (0, ) (8.1) eine parabolische Differentialgleichung
Konstruktion der reellen Zahlen. 1 Der Körper der reellen Zahlen
 Vortrag zum Proseminar zur Analysis, 24.10.2012 Adrian Hauffe-Waschbüsch In diesem Vortrag werden die reellen Zahlen aus rationalen Cauchy-Folgen konstruiert. Dies dient zur Vorbereitung der späteren Vorträge,
Vortrag zum Proseminar zur Analysis, 24.10.2012 Adrian Hauffe-Waschbüsch In diesem Vortrag werden die reellen Zahlen aus rationalen Cauchy-Folgen konstruiert. Dies dient zur Vorbereitung der späteren Vorträge,
Erste Anwendungen von π 1 (S 1 ) und mehr Elementares über π 1
 und mehr Elementares über π 1") Abschnitt 4 Erste Anwendungen von π 1 (S 1 ) und mehr Elementares über π 1 Der Brouwersche Fixpunktsatz Bisher haben wir nur die Fundamentalgruppen kontrahierbarer Räume und der Kreislinie berechnet. Das
Abschnitt 4 Erste Anwendungen von π 1 (S 1 ) und mehr Elementares über π 1 Der Brouwersche Fixpunktsatz Bisher haben wir nur die Fundamentalgruppen kontrahierbarer Räume und der Kreislinie berechnet. Das
Beschreibungskomplexität von Grammatiken Definitionen
 Beschreibungskomplexität von Grammatiken Definitionen Für eine Grammatik G = (N, T, P, S) führen wir die folgenden drei Komplexitätsmaße ein: Var(G) = #(N), Prod(G) = #(P ), Symb(G) = ( α + β + 1). α β
Beschreibungskomplexität von Grammatiken Definitionen Für eine Grammatik G = (N, T, P, S) führen wir die folgenden drei Komplexitätsmaße ein: Var(G) = #(N), Prod(G) = #(P ), Symb(G) = ( α + β + 1). α β
2.2 Kollineare und koplanare Vektoren
 . Kollineare und koplanare Vektoren Wie wir schon gelernt haben, können wir einen Vektor durch Multiplikation mit einem Skalar verlängern oder verkürzen. In Abbildung 9 haben u und v die gleiche Richtung,
. Kollineare und koplanare Vektoren Wie wir schon gelernt haben, können wir einen Vektor durch Multiplikation mit einem Skalar verlängern oder verkürzen. In Abbildung 9 haben u und v die gleiche Richtung,
Topologieseminar. Faserbündel. Michael Espendiller. 16. Oktober 2010 Universität Münster - 3 Faserbündel oder lokal triviale Bündel 4
 Wintersemester 2010/2011 Topologieseminar Faserbündel Michael Espendiller 16. Oktober 2010 Universität Münster - Inhaltsverzeichnis 1 Allgemeine Bündel 1 2 Morphismen und Schnitte 2 3 Faserbündel oder
Wintersemester 2010/2011 Topologieseminar Faserbündel Michael Espendiller 16. Oktober 2010 Universität Münster - Inhaltsverzeichnis 1 Allgemeine Bündel 1 2 Morphismen und Schnitte 2 3 Faserbündel oder
2 Die Menge der ganzen Zahlen. von Peter Franzke in Berlin
 Die Menge der ganzen Zahlen von Peter Franzke in Berlin Das System der natürlichen Zahlen weist einen schwerwiegenden Mangel auf: Es gibt Zahlen mn, derart, dass die lineare Gleichung der Form mx n keine
Die Menge der ganzen Zahlen von Peter Franzke in Berlin Das System der natürlichen Zahlen weist einen schwerwiegenden Mangel auf: Es gibt Zahlen mn, derart, dass die lineare Gleichung der Form mx n keine
Die Gamma-Funktion, das Produkt von Wallis und die Stirling sche Formel. dt = lim. = lim = Weiters erhalten wir durch partielle Integration, dass
 Die Gamma-Funktion, das Produkt von Wallis und die Stirling sche Formel Zuerst wollen wir die Gamma-Funktion definieren, die eine Verallgemeinerung von n! ist. Dazu benötigen wir einige Resultate. Lemma.
Die Gamma-Funktion, das Produkt von Wallis und die Stirling sche Formel Zuerst wollen wir die Gamma-Funktion definieren, die eine Verallgemeinerung von n! ist. Dazu benötigen wir einige Resultate. Lemma.
Lösungen zu Übungsblatt 9
 Analysis : Camillo de Lellis HS 007 Lösungen zu Übungsblatt 9 Lösung zu Aufgabe 1. Wir müssen einfach das Integral 16 (x + y d(x, y x +y 4 ausrechnen. Dies kann man einfach mittels Polarkoordinaten, da
Analysis : Camillo de Lellis HS 007 Lösungen zu Übungsblatt 9 Lösung zu Aufgabe 1. Wir müssen einfach das Integral 16 (x + y d(x, y x +y 4 ausrechnen. Dies kann man einfach mittels Polarkoordinaten, da
Dynamische Systeme und Zeitreihenanalyse // Komplexe Zahlen 3 p.2/29
 Dynamische Systeme und Zeitreihenanalyse Komplexe Zahlen Kapitel 3 Statistik und Mathematik WU Wien Michael Hauser Dynamische Systeme und Zeitreihenanalyse // Komplexe Zahlen 3 p.0/29 Motivation Für die
Dynamische Systeme und Zeitreihenanalyse Komplexe Zahlen Kapitel 3 Statistik und Mathematik WU Wien Michael Hauser Dynamische Systeme und Zeitreihenanalyse // Komplexe Zahlen 3 p.0/29 Motivation Für die
Technische Universität München Zentrum Mathematik. Übungsblatt 7
 Technische Universität München Zentrum Mathematik Mathematik (Elektrotechnik) Prof. Dr. Anusch Taraz Dr. Michael Ritter Übungsblatt 7 Hausaufgaben Aufgabe 7. Für n N ist die Matrix-Exponentialfunktion
Technische Universität München Zentrum Mathematik Mathematik (Elektrotechnik) Prof. Dr. Anusch Taraz Dr. Michael Ritter Übungsblatt 7 Hausaufgaben Aufgabe 7. Für n N ist die Matrix-Exponentialfunktion
Skript und Übungen Teil II
 Vorkurs Mathematik Herbst 2009 M. Carl E. Bönecke Skript und Übungen Teil II Das erste Semester wiederholt die Schulmathematik in einer neuen axiomatischen Sprache; es ähnelt damit dem nachträglichen Erlernen
Vorkurs Mathematik Herbst 2009 M. Carl E. Bönecke Skript und Übungen Teil II Das erste Semester wiederholt die Schulmathematik in einer neuen axiomatischen Sprache; es ähnelt damit dem nachträglichen Erlernen
Der Begriff der konvexen Menge ist bereits aus Definition 1.4, Teil I, bekannt.
 Kapitel 3 Konvexität 3.1 Konvexe Mengen Der Begriff der konvexen Menge ist bereits aus Definition 1.4, Teil I, bekannt. Definition 3.1 Konvexer Kegel. Eine Menge Ω R n heißt konvexer Kegel, wenn mit x
Kapitel 3 Konvexität 3.1 Konvexe Mengen Der Begriff der konvexen Menge ist bereits aus Definition 1.4, Teil I, bekannt. Definition 3.1 Konvexer Kegel. Eine Menge Ω R n heißt konvexer Kegel, wenn mit x
Lösungen zu den Hausaufgaben zur Analysis II
 Christian Fenske Lösungen zu den Hausaufgaben zur Analysis II Blatt 6 1. Seien 0 < b < a und (a) M = {(x, y, z) R 3 x 2 + y 4 + z 4 = 1}. (b) M = {(x, y, z) R 3 x 3 + y 3 + z 3 = 3}. (c) M = {((a+b sin
Christian Fenske Lösungen zu den Hausaufgaben zur Analysis II Blatt 6 1. Seien 0 < b < a und (a) M = {(x, y, z) R 3 x 2 + y 4 + z 4 = 1}. (b) M = {(x, y, z) R 3 x 3 + y 3 + z 3 = 3}. (c) M = {((a+b sin