Die Entwicklungsumgebung
|
|
|
- Victoria Fiedler
- vor 7 Jahren
- Abrufe
Transkript
1 5. für den 8051/80535-Mikrocontroller Programmentwicklung für den Mikrocontroller erfolgt heute mit Softwarewerkzeugen, die den gesamten Entwicklungsprozeß vom Schreiben des Programms über die Übersetzung bis zum Programmtest unter einer gemeinsamen Entwicklungsoberfläche unterstützen. Diese Entwicklungsoberflächen werden meistens als IDE (Integrated Development Environment) bezeichnet. IDE s werden für die 8051-Controllerfamilie von mehreren Firmen angeboten. Im Computertechniklabor der Hochschule Bremen wird die IDE der Firma Keil benutzt, da hier eine leistungsfähige, frei kopierbare Demoversion existiert, die die Anforderungen für die Laborübungen gut erfüllt. Die aktuelle Version kann unter bezogen werden. Diese IDE läuft unter Windows und enthält einen Editor, mit dem der Quelltext des Programms erstellt wird einen leistungsfähigen Macro-Assembler A51 zur Übersetzung von Assemblerprogrammen einen C-Crosscompiler C51 mehrere Hilfsprogramme wie Linker, Object-File-Converter und Library-Manager zur Erstellung ablauffähiger Programme einen leistungsfähigen Debugger zum Programmtest. Dabei kann das Programm sowohl mit einem Simulator als auch in der Zielhardware getestet werden die Benutzungsoberfläche µvision, über die sämtliche Programme bedient werden Die Demoversion ist voll Funktionsfähig, Programme sind aber auf eine Object-Codelänge von weniger als 2 K Byte begrenzt und die Floating-Point-Library ist nicht verfügbar. Außerdem wird nur eine kleine Auswahl von 8051-Derivaten in der Demoversion unterstützt. 5.1.Erstellung von Assemblerprogrammen Die Assemblersyntax ist bereits im vorhergehenden Kapitel beschrieben worden. Hier soll jetzt aufgezeigt werden, wie man das entworfene Programm eingibt das eingegebene Programm übersetzt aufgetretene Syntaxfehler beseitigt Zuerst muß die Entwicklungsumgebung µvision gestartet werden. µvision kann über das entsprechende Icon (sofern vorhanden) oder über das Startmenue Programme unter Windows aufgerufen werden. Es erscheint dann ein Fenster entprechend Abb. 5.1 Größere Programme für Mikrocontroller werden aus mehreren eigenständigen Programmmodulen zusammengesetzt. Ein Programmodul löst in der Regel eine Teilaufgabe innerhalb einer größeren Gesamtaufgabe (Projekt). Die gemeinsame Verwaltung aller Module erfolgt im Rahmen der Projektverwaltung. Wenn auch die im Rahmen des Mikroprozessorlabors zu erstellenden Programme meistens nur aus einem Programmmodul bestehen, muß trotzdem für jede Programmentwicklung ein neues Projekt eröffnet werden. 5-1
2 Abb. 5.1 Bedienungsoberfläche µvision Bei der erstmaligen Eingabe eines Assemblerprogramms muß deshalb zuerst ein neues Projekt erstellt werden. Dies erfolgt unter µvision folgendermaßen: Projekt-Menue öffnen, New Project wählen und den Namen des neuen Projekts unter Dateiname (*.prj) angeben. Da zu dieser Zeit noch keine Quellprogrammdateien vorhanden sind, Save wählen und zum Hauptmenue zurückkehren. Anschließend im File-Menue New wählen, das Quellprogramm eingeben und unter einem von Ihnen gewünschten Namen abspeichern. Dies ist in der Regel ein anderer Name als der Projektname! Als Hinweis darauf, daß es sich um ein Assemblerprogramm handelt, sollte die Datei die Endung A51 haben (z.b. PROG1.A51). Projekt-Menue öffnen, Edit Project wählen. Add Sorce-Files wählen und die eben editierte Datei in die Liste der Source-Files aufnehmen. Darauf achten, daß als Translator A51-Assembler eingestellt ist. Diese Einstellung abspeichern. Ein Projekt muß nur einmal auf dem Rechner erstellt werden. Alle Einstellungen für Assembler, Compiler, Linker, Make und OH51 werden bei Beendigung von µvision gespeichert und stehen bei einem Neustart wieder zur Verfügung. Wurde das Projekt schon in einer früheren Sitzung angelegt, kann das bereits existierende Assemblerprogramm folgendermaßen geöffnet werden: Projekt-Menue öffnen, Open Project wählen. Aus der Liste der existierenden Projekte das gewünschte Projekt mit Doppelklick auswählen. Im File-Menue File Open wählen, unter Dateiname den Default-Wert *.c durch *.a51 ersetzen. Aus der angezeigten Liste die entsprechende Quelldatei (die in der Regel nicht den Namen des Projektes hat) auswählen und weiterbearbeiten. Das Editorfenster ist jetzt geöffnet und das Quellprogramm (Source-Programm) kann editiert werden. Ist das Programm komplett eingegeben bzw. sind alle gewünschten Änderungen durchgeführt, kann es assembliert werden. Dazu das Editor-Fenster mit dem zu übersetzenden Quellprogramm geöffnet lassen und im Projekt-Menue Compile wählen. Das im Editorfenster befindliche Quellprogramm wird übersetzt. Eventuell vorhandene Fehler werden in einem getrennten Fenster mit einem Hinweis auf den festgestellten Fehler angezeigt. Durch Doppelklick auf den angezeigten Fehler wird in das Editorfenster zurückverzweigt und der Cursor in der Nähe 5-2
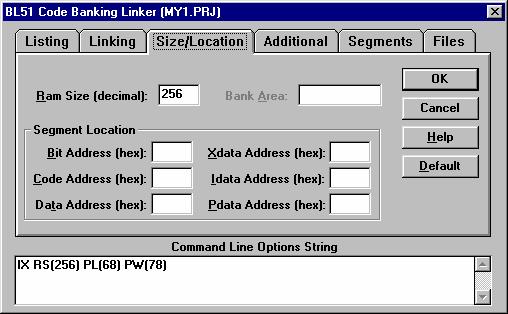
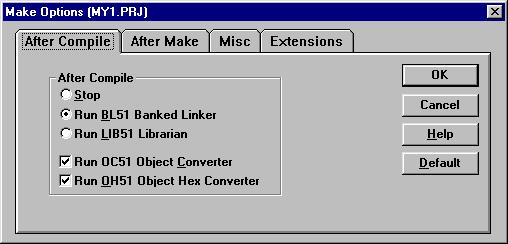
3 des aufgetretenen Fehlers positioniert. Sobald das Quellprogramm (und alle anderen, u.u. im Projekt vorhandenen Module) fehlerfrei ist, kann es über den Linker/Locator in ein ablauffähiges Programm umgewandelt werden. Dazu im Projekt-Menue Make Build Project auswählen. Es werden der Linker und Locator und u.u. der Object-Hex-Converter gestartet (in Abhängigkeit der unter Optionen vorgenommenen Einstellungen)und ein im Simulator dscope oder im Übungsrechner unter tscope ablauffähiges Programm erzeugt. Sollten beim Make- Prozeß Fehlermeldungen auftreten, müssen die unter Options möglichen Einstellungen für A51 Assembler, BL51 Linker und für Make überprüft werden. Die Standardeinstellungen finden Sie unter Abschnitt Programmtest mit dem Softwaredebugger dscope dscope ist ein Werkzeug zum Test von Programmen, zur Fehlerlokalisierung und Fehlerbehebung, das auf dem PC abläuft. Um das zu realisieren, muß ein 8051-kompatibler Controller vollständig softwaremäßig auf dem PC simuliert werden. Weiterhin muß es eine Schnittstelle zum Benutzer geben, über die der Programmtest auf dem simulierten System ermöglicht wird. Diese Schnittstelle wird über ein weiteres Programm, den Debugger realisiert. Der Simulator selbst ist von außen nicht erreichbar. Er wird über dscope aufgerufen und gesteuert. Dies hat den Vorteil, daß durch Austausch des Simulators mit einer Kommunikationssoftware ein Monitorprogramm auf einem Zielsystem angesprochen werden kann und daß so mit den gleichen Debugbefehlen auch die erstellte Programme auf einem Hardwaresystem getestet werden können. Der Simulator hat die Aufgabe, das Verhalten des Prozessors möglichst weitgehend auf dem PC nachzubilden. Diese Aufgabe läßt sich in mehrere Teilaufgaben untergliedern: Simulation der auf dem Chip vorhandenen Hardware des Prozessors Simulation extern anschließbarer Hardware Simulation des Befehlsvorrates des Prozessors Simulation der Schnittstellen des Prozessors zur Außenwelt Zur Simulation der Prozessorhardware gehört alles das, was "on board" des Chips vorhanden ist. Bei der Prozessorfamilie gehören hierzu: internes RAM internes ROM (Programmspeicher) Register Special-Function-Register Timer/Counter Interruptlogik Analog/Digital-Wandler (z.b. beim 80535) Watchdog (z.b. beim 80535) Die Simulation der externen Hardware muß mindestens das umfassen. externe RAM und das externe ROM Zur Simulation der Prozessorbefehle gehört der gesamte Befehlsvorrat des Prozessors und deren Ausführung. Die Simulation der Schnittstellen des Prozessors umfaßt die Parallelen Ports Seriellen Ports Alle o.a. Funktionselemente sind in dscope in eigenen Fenstern darstellbar. Neben einem Debug- und einem Command-Fenster, die in fast jedem Fall benötigt werden, können weitere Fenster, die die Register und die Peripherie des Mikrocontrollers beschreiben, geöffnet werden. Weiterhin stehen bei Bedarf Fenster bereit, in denen ausgewählte Variablen beobachtet werden können oder die die im Programm benutzten Symbole 5-3

4 darstellen. Die auf dem Bildschirm darzustellenden Fenster werden über den Menue-Punkt View ausgewählt. Abb 5.2 zeigt den Bildschirm von dscope mit mehreren geöffneten Fenstern während einer Debug-Sitzung. Das größte, hier geöffnete Fenster ist das Debug-Fenster. Abb. 5.2 Bildschirm von dscope Folgende Funktionseinheiten können in jeweils eigenen Fenstern von dscope angezeigt werden: Anzeige des internen RAM Anzeige des externen RAM Anzeige des internen ROM Anzeige des externen ROM Anzeige der Register des Prozessors Anzeige der Special-Function-Register Anzeige der aktuell abgearbeiteten Befehle und der als nächsten ausführbaren Befehle Der Benutzer hat für den Programmstart und den Programmtest folgende Steuerungsmöglichkeiten beim Debugger: Einladen des Testprogramms Festlegung von Start- und Stopadressen Festlegung von Unterbrechungsmöglichkeiten 5-4
5 Festlegung der Arbeitsweise des Simulators (Trace, Run, Single Step) Über Menuepunkte oder Buttons in der Werkzeugleiste im Debugfenster können o.a. Punkte ausgewählt werden. Im Folgenden finden Sie eine kurze Anleitung, wie Sie ein unter µvision erstelltes Programm in dscope laden und ausführen können. a. Einstellung des benutzten Prozessors Bevor das zu testende Programm geladen wird, muß der richtige Treiber für den benutzten Mikrocontroller geladen werden. Die Auswahl geschieht über eine Pull-Down-Liste im linken Teil der Toolbar (Werkzeugleiste) unterhalb der Zeile, in der sich die Menue-Punkte befinden. Für den im Labor benutzten Mikrocontroller können die Treiber dll oder 80515a.dll ausgewählt werden. Die Treiber mon51.dll und mon51a.dll sind für die Kommunikation des Debuggers mit externer Hardware (z.b. Übungsrechner) vorgesehen. b. Laden des zu testenden Programms Öffnen Sie das File-Menue und wählen Load Object file. Wählen Sie die zu Ihrem Projekt gehörende Datei aus. Sie hat den Namen Ihres Projekts und nicht den Namen entsprechend Ihrer Quelldatei. Hat Ihre Projektdatei z.b. den Namen myproj.prj, dann hat der zu ladende Objectfile den Namen myproj. c. Programmzähler auf Startadresse setzen Normalerweise wird die Startadresse Ihres Programms durch eine ORG - Anweisung festgelegt, z.b.org 8100H Sie setzen jetzt den Programmzähler des Simulators bzw. die Startadresse im Übungsrechner durch die folgende Anweisung im Kommando-Fenster des Debuggers: $ = Startadresse (in HEX) z.b. $ = 0x8100. Das $-Zeichen wird oft als Symbol für den Stand des Befehlszählers verwendet. d. Öffnen weiterer Fenster Je nachdem, welche Peripherie des Mikrocontrollers, welche Speicher und welche Register Sie während des Programmtests beobachten wollen, können Sie die entsprechenden weiteren Fenster über das Menue View öffnen und an der von Ihnen gewünschten Stelle positionieren. Das Speicherfenster kann zusätzlich über das Kommandofenster konfiguriert werden. Damit können Sie festlegen, welchen Speichertyp des Controllers (direkt oder indirekt adressierbarer Speicher des internen RAM, externer Speicher oder Programmspeicher) und welchen Adressbereich Sie anzeigen wollen. Grundsätzlich gilt folgende Befehlssyntax d s: anfangsadresse,endadresse wobei d der Befehl für die Anzeige eines Speicherbereichs ist. s legt die Art des anzuzeigenden Speichers fest. Es gilt s = d : interner direkt adressierbarer Speicherbereich ( 0.. 7FH) s = i : interner indirekt adressierbarer Speicherbereich (0.. FFH) s = x : externer Datenspeicher ( 0.. FFFFH) s = c : Codespeicher ( 0.. FFFFH) Anfangsadresse und Endadresse müssen hexadezimal in der Form 0xA78C angegeben werden. e. Ausführung des Programms Für die Programmausführung gibt es die folgenden Befehle 5-5
6 GO GOTILCURS StepOut StepInto StepOver Stop Startet das Programm an der augenblicklichen Position des Befehlszählers Startet das Programm an der augenblicklichen Position des Befehlszählers und stoppt es an des Position des Cursors im Debugfenster Ein bereits begonnenes Unterprogramm wird zu Ende geführt. Die Simulation stoppt nach der RET-Anweisung Ausführung eines einzelnen Befehls an der augenblicklichen Position des Befehlszählers Ein Unterprogramm wird komplett ausgeführt, die Simulation stoppt nach der RET-Anweisung Das gerade laufende Programm wird im Simulator angehalten. f. Weitere Hinweise Wenn während des Programmtests Ein- oder Ausgaben über die serielle Schnittstelle erfolgen sollen, muß die serielle Schnittstelle des Mikrocontrollers zuvor durch das zu testende Programm entsprechend initialisiert worden sein. Wird im Fenster der seriellen Schnittstelle SBUF verändert und RI gesetzt, so liest ein entsprechendes Programm nicht diesen Wert, sondern meistens den Wert Null. Der in SBUF eingetragene Wert wird allerdings im Serial I/O Fenster richtig angezeigt. Im Fenster der seriellen Schnittstelle möglichst nur RI und TI verändern. Wenn ein externer Rechner angeschlossen ist, überhaupt nichts verändern, es besteht die Gefahr, daß das System sonst abstürzt. 5-6
7 5.3 Programmtest mit Monitor dscope arbeitet zum einen, wie unter 5.2. beschrieben, als reiner, softwaremäßig realisierter Debugger. Der gesamte Programmtest läuft auf dem PC ab. Diese Art der Programmentwicklung wird vor allem dann genutzt, wenn das zu realisierende Mikrocontrollersystem (das Zielsystem) noch nicht existiert oder bei größeren Projekten nicht in einer ausreichenden Anzahl vorhanden ist. Zum anderen kann dscope auch als Debugger auf hardwaremäßige realisierten Systemen eingesetzt werden, dann ändert dscope seinen Namen in tscope (t steht für target). Hier wird entsprechend Abb. 5.3 der Softwaresimulator des Prozessors durch einen real existierenden Prozessor in der Zielhardware ersetzt. Die Steuerung dieses Prozessors erfolgt über ein sog. Monitorprogramm, das das Laden von Anwendungsprogrammen in das Zielsystem, den Start und das Anhalten des Anwendungsprogramms unter bestimmten Bedingungen und die Überprüfung und Veränderung von Register- und Speicherinhalten ermöglicht. Die Kommunikation zwischen tscope und dem Monitorprogramm erfolgt über eine serielle Schnittstelle. Der Befehlssatz zum debuggen von Programmen in der Zielhardware ist weitgehend identisch mit dem des Softwaredebuggers, sodaß beim Übergang auf das Zielsystem keine neuen Befehle gelernt werden müssen. Es muß lediglich im Auswahlmenue für die CPU-Simulation nicht der Treiber für eine CPU 8z.B DLL) sondern der Treiber für den Target-Monitor (z.b. Mon51.DLL) ausgewählt werden. PC mit Debugger tscope Serielle Schnittstelle 8051-kompatibles System mit Monitorprogramm Abb. 5.3 Programmtest in einem Hardwaresystem 5.4. Test einfacher Beispielprogramme mit Hilfe von dscope Vor Ausführung der Beispiele lesen Sie bitte die Beschreibung zum Assembler in Kapitel 4. Das "Programm" BSP1 hat keine sinnvolle Gesamtfunktion. Vielmehr sind grundlegende Befehle des 8051 aneinandergereiht, um die Wirkungsweise der Befehle zu demonstrieren und den Benutzer mit der Funktion des Simulators vertraut zu machen. Sie sollten das folgende Programm über den in µvision vorhandenen Editor eingeben, mit A51 übersetzen und dann schrittweise ausführen. Dabei sollten Sie vor der Ausführung jeden Befehls überlegen, welche Wirkung seine Ausführung auf den Zustand des Prozessors haben wird. Öffnen Sie dann das entsprechende Fenster in dscope (z.b. wenn sich das Register R1 ändern soll, das Registerfenster, wenn Sie eine Änderung im internen Speicher erwarten, das Speicherfenster). Bevor Sie das Programm eingeben, sollten Sie entsprechend Kap. 5.2 ein Projekt (z.b. TEST1.PRJ) und eine Datei für das Programm (z.b. BSP1.A51) einrichten Aus der Endung.A51 erkennt µvision, daß es sich um ein Assemblerprogramm handelt. ORG 8100H MOV A,#77 MOV R0,A MOV R1,#88 XCH A,R1 MOV 40,A ;legt den Programmzähler auf die Startadresse 8100H fest ;(willkürlich gewählter Wert) ;Konst. in Accu, unmittelbare Adressierung ;Transport Register <--> Register ;Transport Register <--> Register ;Transport interner Speicher <--> Register 5-7
8 ;direkte Adressierung MOV R2,40 ;Transport Register <--> INC 40 ;Inhalt des internen Speichers um 1 erhöhen XCH A,40 ;Registerindirekte Adressierung MOV DPTR,#100 INC DPTR MOVX A,@DPTR MOV P3,R1 MOV P0,@R0 MOV P1,40 SETB 8 MOV C,8 ;Zugriff auf externes RAM, untere 256 Byte ;über DPTR kann der gesamte Speicher- ;bereich adressiert werden ;MOVX nur über Accu, die Anzeige des ext. ;Speicherber. läßt sich mit F8 scrollen! ;Ausgabe über Port CPL C MOV 8,C MOV A,#34 ;Duale Addition ADD A,#39 MOV A,#34 ;Dezimale Addition ADD A,#39 DA A ;Dezimalkorrektur MOV A,#20 MOV B,#5 MUL AB MOV A,#88 ANL A,@R0 SETB P1.1 ORL C,P1.1 ANL C,/P1.1 ;Der bitadressierbare interne Speicherbe- ;reich beginnt ab Adresse 20H. Bit 8 hat ;dann die Adresse 21.0 ;Carry-Flag ist der Boolsche Accumulator, ;steht in Bit 7 des Programm-Status-Wortes ;PSW ;Ergebnis der Multiplikation in A und B ;Logische Funktionen, byteweise ;Logische Funktionen, bitweise END ;signalisiert dem Übersetzer das Ende des zu über- ;setzenden Programms Bevor Sie das Programm übersetzen, müssen Sie dafür sorgen, daß die Einstellungen im Optionsmenue entsprechend Kap. 5.6 vorgenommen worden sind. Sobald die Übersetzung (über "Make Build Project" im Project-Menue) fehlerfrei gelaufen ist, steht eine in den Debugger ladbare Version Ihres Programms (Object-Programm) zur Verfügung). Sie können dann dscope über den zugehörige "Button" in der Werkzeugleiste (ganz links) aufrufen. In dscope muß als erstes der Prozessortyp in dem entsprechenden Menue ausgewählt und dann das Object-Programm geladen werden. Das Object- Programm hat nicht den Namen Ihres Quellprogramms sondern den Namen Ihres Projektes! Hier noch u.u. die Werkzeugleiste abbilden. 5-8
9 Mit dem Programm BSP2 soll der Mechanismus der Unterprogrammaufrufe demonstriert werden. Bei einem Unterprogrammaufruf wird der Programmzähler mit der Startadresse des Unterprogramms geladen und anschließend die im Unterprogramm stehenden Befehle ausgeführt. Nach Beendigung des Unterprogramms soll das aufrufende Programm mit dem Befehl fortgesetzt werden, der auf den Unterprogrammaufruf folgt. Das bedeutet, daß beim Aufruf des Unterprogramms die Adresse des auf diesen Aufruf folgenden Befehls gerettet werden muß um bei der Rückkehr aus dem Unterprogramm wieder zur Verfügung zu stehen. Das Retten dieser Adresse erfolgt beim Unterprogrammaufruf automatisch in einen dem Prozessor zur Verfügung stehenden freien Speicherbereich, den Stack. Verwaltet wird der Stack über den Stackpointer, einem 8-Bit-Register, das beim 8051 jeweils auf den letzten, noch belegten Speicherplatz zeigt. Bei einem Unterprogrammaufruf wird automatisch die 16-Bit-Adresse des auf diesen Aufruf folgenden Befehls in den nächsten beiden freien Speicherplätzen des Stacks abgespeichert und der Stackpointer um 2 erhöht. Bei Rückkehr aus dem Unterprogramm mit dem RET-Befehl werden ebenfalls automatisch die beiden letzten belegten Speicherplätze des Stacks in den Programmzähler geladen und der Stack um 2 dekrementiert. Falls der Stackpointer am Ende des Unterprogramms den gleichen Wert hat wie beim Eintritt in das Unterprogramm, bekommt der Prozessor die richtige Rücksprungadresse. Der Mechanismus des Unterprogrammaufrufs ist in Abb graphisch mit den Werten aus dem BSP2-Programm dargestellt. Unterprogramme sind beliebig schachtelbar, solange der Stackbereich genügend Platz für die Speicherung der Rücksprungadresse bietet. Da der Stack beim 8051 nur im internen RAM liegen kann und das interne RAM recht klein ist, sollte die Schachtelungstiefe in engen Grenzen gehalten werden. 8000H MOV SP,#60H 8003H MOV B,#06H 8006H LCALL 9000H Retten der Adresse 8009H auf den Stack Sprung zum Unterprogramm Startadr. 9000H 9000H PUSH B 9002H MOV A,#0AH 900AH RET 8009H MOV R1,A Holen der Adresse 8009H vom Stack in den Programmzähler Abb Mechanismus des Unterprogrammaufrufs Da das Programm BSP2 im wesentlichen den Mechanismus der Unterprogrammbehandlung demonstrieren soll, werden in den Unterprogrammen selbst keine umfangreichen Operationen ausgeführt. Programm BSP2: ORG 8000H MOV SP,#5FH MOV B,#6 CALL UP1 ;erster freier Speicherplatz im Stack bei 60H ;Aufruf des ersten Unterprogramms 5-9
10 MOV R1,A MOV R2, B L1: LJMP L1 ORG 9000H ;erstes Unterprogramm beginnt bei 9000H UP1: PUSH B ;Beginn Unterprogramm 1 MOV A,#0AH MUL AB CALL UP2 POP B RET ORG 9100H ;zweites Unterprogramm beginnt bei 9100H UP2: MOV P1, B ;Beginn Unterprogramm 2 MOV P2,A RET END Der Aufruf von UP2 ist in Abb. 5.4 aus Gründen der Übersichtlichkeit nicht dargestellt. Wenn Sie das Programm starten und den internen Speicher im Speicherfenster beobachten, ergibt sich im Debug-Fenster folgender Programmablauf: MOV SP,# F006 MOV B,# LCALL 9000 ;Beobachten Sie den Stack- ;pointer SP und den Stack ;ab Adresse 60H 9000 C0F0 PUSH B ;der Programmzähler PC steht ;jetzt auf 9000H! A MOV A,#0A 9004 A4 MUL AB LCALL 9100 ;SP und Stack beobachten! F090 MOV P1,B ;PC steht jetzt auf 9100H 9103 F5A0 MOV P2,A RET ;SP und PC beachten! 9008 D0F0 POP B ;SP beachten! 900A 22 RET ;SP und PC beachten! 8009 F9 MOV R1,A ;jetzt sind wir wieder im Hauptprogramm Verändern Sie anschließend das Programm, indem Sie PUSH B und später POP B weglassen. Warum kommen Sie jetzt nach Beendigung des Unterprogramms UP1 nicht mehr in das Hauptprogramm zurück? 5.5. Fehlersuche mit Hilfe des Debuggers Größere Programme laufen in der Regel nach ihrem Entwurf und der Codierung nicht sofort fehlerfrei. Mögliche Fehlerquellen sind u.a.: Fehlerhafter Algorithmus Fehlerhafte Implementierung eines Algorithmus Codierungsfehler (Auswahl eines nicht geeigneten Befehls) 5-10
11 Fehler, die in Folge zeitlicher Abhängigkeiten verschiedener Prozesse während der Laufzeit auftreten Bis auf die zuletzt genannte Fehlermöglichkeit lassen sich alle anderen Fehler mit Hilfe des Softwaresimulators finden. Da der Simulator auf dem PC abläuft, ist der Mikrocontroller nicht in Echtzeit zu simulieren. Deshalb kann der Simulators auch nicht auf in Echtzeit ablaufende Prozesse angesetzt werden. Der Simulator ist in der Größenordnung um den Faktor 2 bis 10 (abhängig von der Geschwindigkeit des PC) langsamer als der Mikrocontroller selbst (12 MHz Takt am Mikrocontroller vorausgesetzt). Alle anderen Fehler lassen sich mit Hilfe des Simulators finden. Ist das realisierte Programm von mehreren, u.u. in ihrem Zeitverhalten schwer beschreibbaren Eingangssignalen abhängig, wird der Test auf dem Simulator mit manuellem Setzen der Eingabegrößen recht aufwendig. In diesem Fall ist der Test auf einem in Hardware vorhandenen Mikrocontrollersystem meistens einfacher und schneller durchzuführen. Die einfachste Möglichkeit, ein Programm zu testen, ist die Ausführung der Befehle im Einzelschrittmodus. Der Programmzähler wird auf die Anfangsadresse des zu testenden Programmteils gesetzt (z.b. $ = 0x8100) und das Programm wird Befehl für Befehl über den Einzelschritt-Button ausgeführt. Dabei wird die Wirkung der Befehle auf die angegebenen Operanden in den entsprechenden Fenstern des Bildschirms beobachtet und verglichen, ob die erwarteten Ergebnisse erzeugt werden. Auf diese Weise ist ein vorhandener Fehler eindeutig lokalisierbar. Diese Testmöglichkeit ist aber nur in kürzeren Programmen sinnvoll einsetzbar. Tritt ein Fehler erst nach z.b. dem 500. Befehl auf, müßte die Einzelschrittfunktion 500 mal durchgeführt werden. Es besteht deshalb die Möglichkeit, Programmteile, von denen man annimmt, daß sie fehlerfrei sind, automatisch abarbeiten zu lassen und das Programm in der Nähe des als fehlerhaft vermuteten Programmteils anzuhalten. Dies geschieht durch Setzen eines "Breakpoints" durch Doppelklick auf den entsprechenden Befehl im Debug-Fenster des Simulators. Nachdem das Programm dort angehalten hat, wird man zuerst kontrollieren, ob alle wichtigen Speicherplätze die vorausberechneten Werte enthalten, d.h. ob das Programm bis hierhin fehlerfrei gelaufen ist, und dann im Einzelschrittbetrieb weiter testen.. Erwartet das zu testende Programm Eingaben über die auf dem Controller implementierte Peripherie oder soll das Programm über diese Peripherie (z.b. Ports, serielle Schnittstelle) Ausgaben machen, so läßt sich dies über Öffnen der entsprechenden Fenster realisieren. 5-11
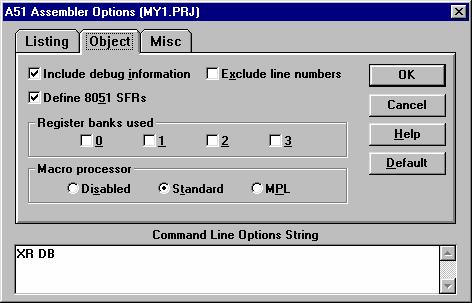

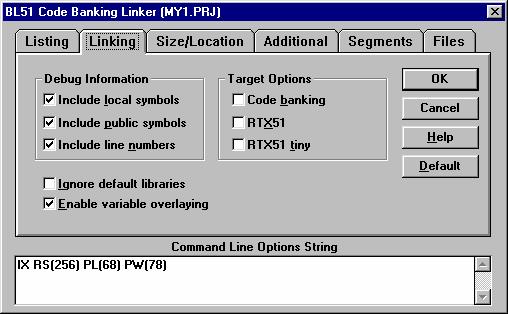
12 5.6. Standardeinstellungen für µvision Einstellungen im Optionsmenue von µvision für Assemblerprogrammierung 5-12
13 5-13
Der 80535-Übungsrechner
 6. Für den Test kleinerer Programmodule ohne Berücksichtigung des Echtzeitverhaltens ist der Simulator das geeignete Werkzeug. Durch die Möglichkeit der Einzelschrittausführung sind erste Tests von Programmen
6. Für den Test kleinerer Programmodule ohne Berücksichtigung des Echtzeitverhaltens ist der Simulator das geeignete Werkzeug. Durch die Möglichkeit der Einzelschrittausführung sind erste Tests von Programmen
Praktikum Mikrocomputertechnik. Anleitung
 Praktikum Mikrocomputertechnik Anleitung Im Praktikum wird der Mikrocontroller 68332 von Motorola verwendet. Dieser Mikrocontroller besteht aus einer 32-Bit CPU und integrierten Peripheriebausteinen (ser.
Praktikum Mikrocomputertechnik Anleitung Im Praktikum wird der Mikrocontroller 68332 von Motorola verwendet. Dieser Mikrocontroller besteht aus einer 32-Bit CPU und integrierten Peripheriebausteinen (ser.
Mikrocontrollertechnik. F5 Erstes Programm. AVR Studio 4
 In diesem Kapitel wird erklärt wie man möglichst schnell mit dem Programm Studio 4 von Atmel und einem ISP Programmer einen ATmega Controller programmiert. Es ist kein umfassendes Tutorial zum Programm
In diesem Kapitel wird erklärt wie man möglichst schnell mit dem Programm Studio 4 von Atmel und einem ISP Programmer einen ATmega Controller programmiert. Es ist kein umfassendes Tutorial zum Programm
MOP: Befehlsliste für den Mikrocontroller 8051
 Beuth Hochschule Berlin FB VI, Labor für Digitaltechnik MOP: Befehlsliste für den Mikrocontroller 8051 Erläuterung der Operanden Operand A addr11 addr16 bit /bit C #data #data16 direct DPTR PC Ri Rn rel
Beuth Hochschule Berlin FB VI, Labor für Digitaltechnik MOP: Befehlsliste für den Mikrocontroller 8051 Erläuterung der Operanden Operand A addr11 addr16 bit /bit C #data #data16 direct DPTR PC Ri Rn rel
D i g i t a l l a b o r
 Hochschule Karlsruhe Technik und Wirtschaft Fakultät für Informatik und Wirtschaftsinformatik Prof. Dr. A. Ditzinger / Dipl.-Inform. (FH) O. Gniot Prof. Dr. N. Link / Dipl.-Ing. J. Krastel D i g i t a
Hochschule Karlsruhe Technik und Wirtschaft Fakultät für Informatik und Wirtschaftsinformatik Prof. Dr. A. Ditzinger / Dipl.-Inform. (FH) O. Gniot Prof. Dr. N. Link / Dipl.-Ing. J. Krastel D i g i t a
Befehlssatz der Mikrocontroller der 51er -Familie
 Befehlssatz der Mikrocontroller der 51er -Familie Abkürzungen: Mikrocontrollerfamilie 8051 Befehlssatz A : Akkumulator Rn : Register R0..R7 Ri : R0 oder R1 dadr : direkte Byte-Adresse im int. Speicher
Befehlssatz der Mikrocontroller der 51er -Familie Abkürzungen: Mikrocontrollerfamilie 8051 Befehlssatz A : Akkumulator Rn : Register R0..R7 Ri : R0 oder R1 dadr : direkte Byte-Adresse im int. Speicher
B1 Stapelspeicher (stack)
") B1 Stapelspeicher (stack) Arbeitsweise des LIFO-Stapelspeichers Im Kapitel "Unterprogramme" wurde schon erwähnt, dass Unterprogramme einen so genannten Stapelspeicher (Kellerspeicher, Stapel, stack) benötigen
B1 Stapelspeicher (stack) Arbeitsweise des LIFO-Stapelspeichers Im Kapitel "Unterprogramme" wurde schon erwähnt, dass Unterprogramme einen so genannten Stapelspeicher (Kellerspeicher, Stapel, stack) benötigen
Praktikum Mikrorechner 4 (Bitmanipulation und Spezialregister)
") Prof. Kemnitz Institut für Informatik, Technische Universität Clausthal November 5, 2014 1/18 Praktikum Mikrorechner 4 (Bitmanipulation und Spezialregister) Prof. Kemnitz Institut für Informatik, Technische
Prof. Kemnitz Institut für Informatik, Technische Universität Clausthal November 5, 2014 1/18 Praktikum Mikrorechner 4 (Bitmanipulation und Spezialregister) Prof. Kemnitz Institut für Informatik, Technische
C/C++ Debugging mit CDT unter Eclipse
 C/C++ Debugging mit CDT unter Eclipse Bevor Sie mit dem Debuggen beginnen können, müssen Sie eine compilierbare Applikation erstellen, also eine Applikation, die keine Syntaxfehler mehr enthält. Sie können
C/C++ Debugging mit CDT unter Eclipse Bevor Sie mit dem Debuggen beginnen können, müssen Sie eine compilierbare Applikation erstellen, also eine Applikation, die keine Syntaxfehler mehr enthält. Sie können
Übungen für die Einführung in die Assemblerprogrammierung mit dem Prozessor c515c
 Übungen für die Einführung in die Assemblerprogrammierung mit dem Prozessor c515c 1 Transportbefehle 1.1 Verwendung nur Akku und Register (R0, R1,... R7) 1.1.1 Kopieren Sie den Wert aus Register1 nach
Übungen für die Einführung in die Assemblerprogrammierung mit dem Prozessor c515c 1 Transportbefehle 1.1 Verwendung nur Akku und Register (R0, R1,... R7) 1.1.1 Kopieren Sie den Wert aus Register1 nach
1. Keil starten. Sollten Sie keinen leeren Bildschirm haben, löschen Sie einfach die
 1 Einführung Keil uvision Bevor Sie Keil uvision starten, erstellen Sie sich einen Ordner im Verzeichnis C:/Keil/ wo Sie Ihre Projekte später ablegen. In diesem Ordner kopieren Sie die Datei 0_template.a51.
1 Einführung Keil uvision Bevor Sie Keil uvision starten, erstellen Sie sich einen Ordner im Verzeichnis C:/Keil/ wo Sie Ihre Projekte später ablegen. In diesem Ordner kopieren Sie die Datei 0_template.a51.
Prof. Dr. Pollakowski 19.03.2013
 Installations- und Bedienungsanleitung für die Mikrocontroller-Entwicklungsumgebung, das Mikrocontroler-Experimentalsystem und den Mikrocontroller-Simulator 1 Begriffe: Entwicklungsumgebung = ein Programm
Installations- und Bedienungsanleitung für die Mikrocontroller-Entwicklungsumgebung, das Mikrocontroler-Experimentalsystem und den Mikrocontroller-Simulator 1 Begriffe: Entwicklungsumgebung = ein Programm
Praktikum Mikrorechner 3 (Adressierungsarten)
") G. Kemnitz Institut für Informatik, Technische Universität Clausthal November 5, 2014 1/15 Praktikum Mikrorechner 3 (Adressierungsarten) G. Kemnitz Institut für Informatik, Technische Universität Clausthal
G. Kemnitz Institut für Informatik, Technische Universität Clausthal November 5, 2014 1/15 Praktikum Mikrorechner 3 (Adressierungsarten) G. Kemnitz Institut für Informatik, Technische Universität Clausthal
3.0 8051 Assembler und Hochsprachen
 3.0 8051 Assembler und Hochsprachen Eine kurze Übersicht zum Ablauf einer Programmierung eines 8051 Mikrocontrollers. 3.1 Der 8051 Maschinencode Grundsätzlich akzeptiert ein 8051 Mikrocontroller als Befehle
3.0 8051 Assembler und Hochsprachen Eine kurze Übersicht zum Ablauf einer Programmierung eines 8051 Mikrocontrollers. 3.1 Der 8051 Maschinencode Grundsätzlich akzeptiert ein 8051 Mikrocontroller als Befehle
Microcontroller Praktikum SS2010 Dipl. Ing. R. Reisch
 Microcontroller Praktikum SS2010 Dipl. Ing. R. Reisch Die wichtigsten Unterlagen/Tools Für das Praktikum Unterlagen/Kenntnisse/Tools wichtig: Datenblatt des AT80USB1287 µc Schaltplan des im Praktikum verwendeten
Microcontroller Praktikum SS2010 Dipl. Ing. R. Reisch Die wichtigsten Unterlagen/Tools Für das Praktikum Unterlagen/Kenntnisse/Tools wichtig: Datenblatt des AT80USB1287 µc Schaltplan des im Praktikum verwendeten
2017/01/23 15:50 1/5 Bedienung
 2017/01/23 15:50 1/5 Bedienung Bedienung (J.Müller, Hilfe zu JTCEMU) Das originale 2K-System Das 2 KByte große Betriebssystem bietet die wichtigsten Funktionen zur Eingabe und Verwaltung von BASIC-Programmen.
2017/01/23 15:50 1/5 Bedienung Bedienung (J.Müller, Hilfe zu JTCEMU) Das originale 2K-System Das 2 KByte große Betriebssystem bietet die wichtigsten Funktionen zur Eingabe und Verwaltung von BASIC-Programmen.
MikroController der 8051-Familie
 i Dipl.-Ing. Roland Dilsch MikroController der 8051-Familie Aufbau, Funktion, Einsatz Vogel Buchverlag Inhaltsverzeichnis Vorwort 5 1 Was ist ein MikrocontroUer? 13 1.1 Aufbau eines Computers 13 1.2 Entstehung
i Dipl.-Ing. Roland Dilsch MikroController der 8051-Familie Aufbau, Funktion, Einsatz Vogel Buchverlag Inhaltsverzeichnis Vorwort 5 1 Was ist ein MikrocontroUer? 13 1.1 Aufbau eines Computers 13 1.2 Entstehung
Kurzanleitung CodeBlocks zur C-Programmierung. In dieser Kurzanleitung wird anhand zweier Beispiele beschrieben, wie C-Programme mit der
 Fakultät für Ingenieurwissenschaften und Informatik Labor für Digital- und Mikroprozessortechnik, Juli 2015 Kurzanleitung CodeBlocks zur C-Programmierung In dieser Kurzanleitung wird anhand zweier Beispiele
Fakultät für Ingenieurwissenschaften und Informatik Labor für Digital- und Mikroprozessortechnik, Juli 2015 Kurzanleitung CodeBlocks zur C-Programmierung In dieser Kurzanleitung wird anhand zweier Beispiele
Prozessor HC680 fiktiv
 Prozessor HC680 fiktiv Dokumentation der Simulation Die Simulation umfasst die Struktur und Funktionalität des Prozessors und wichtiger Baugruppen des Systems. Dabei werden in einem Simulationsfenster
Prozessor HC680 fiktiv Dokumentation der Simulation Die Simulation umfasst die Struktur und Funktionalität des Prozessors und wichtiger Baugruppen des Systems. Dabei werden in einem Simulationsfenster
Einführung in Automation Studio
 Einführung in Automation Studio Übungsziel: Der links abgebildete Stromlaufplan soll mit einer SPS realisiert werden und mit Automation Studio programmiert werden. Es soll ein Softwareobjekt Logik_1 in
Einführung in Automation Studio Übungsziel: Der links abgebildete Stromlaufplan soll mit einer SPS realisiert werden und mit Automation Studio programmiert werden. Es soll ein Softwareobjekt Logik_1 in
Mikrocomputertechnik. Adressierungsarten
 Adressierungsarten Ein Mikroprozessor bietet meist eine Reihe von Möglichkeiten, die Operanden für eine Rechenoperation zu bestimmen. Diese Möglichkeiten bezeichnet man als Adressierungsarten. unmittelbare
Adressierungsarten Ein Mikroprozessor bietet meist eine Reihe von Möglichkeiten, die Operanden für eine Rechenoperation zu bestimmen. Diese Möglichkeiten bezeichnet man als Adressierungsarten. unmittelbare
Maschinensprache und Assembler
 4. Befehle, die ein Digitalrechner ausführen soll, müssen binär codiert vorliegen. Diese Befehle werden als Maschinenbefehle bezeichnet. Will man z.b. beim 8051 den Inhalt des Accus in das Register R2
4. Befehle, die ein Digitalrechner ausführen soll, müssen binär codiert vorliegen. Diese Befehle werden als Maschinenbefehle bezeichnet. Will man z.b. beim 8051 den Inhalt des Accus in das Register R2
Hochschule für Technik und Architektur Bern Digital Signal Processing
 U1-1 U1 DSP56002 EVM Board Installation Umfeld Das DSP56002 EVM (Evaluation Module) ist ein Hilfsmittel zur Einarbeitung und Test einfacher Signalprozessoranwendungen mit dem DSP56002 von Motorola. Der
U1-1 U1 DSP56002 EVM Board Installation Umfeld Das DSP56002 EVM (Evaluation Module) ist ein Hilfsmittel zur Einarbeitung und Test einfacher Signalprozessoranwendungen mit dem DSP56002 von Motorola. Der
Aufsetzen und Debuggen eines CCSv5.5-Projektes für D.module.C6713 DSP mit CODEC D.module.ADDA16
 Praktikum Digitale Signalverarbeitung Digital Signal Processing Lab Department Informations- und Elektrotechnik Labor für Signalverarbeitung Aufsetzen und Debuggen eines CCSv5.5-Projektes für D.module.C6713
Praktikum Digitale Signalverarbeitung Digital Signal Processing Lab Department Informations- und Elektrotechnik Labor für Signalverarbeitung Aufsetzen und Debuggen eines CCSv5.5-Projektes für D.module.C6713
Grundlagen der Informatik Vorlesungsskript
 Grundlagen der Informatik Vorlesungsskript Prof. Dr. T. Gervens, Prof. Dr.-Ing. B. Lang, Prof. Dr. F.M. Thiesing, Prof. Dr.-Ing. C. Westerkamp 16 AUTOMATISCHES ÜBERSETZEN VON PROGRAMMEN MIT MAKE... 2 16.1
Grundlagen der Informatik Vorlesungsskript Prof. Dr. T. Gervens, Prof. Dr.-Ing. B. Lang, Prof. Dr. F.M. Thiesing, Prof. Dr.-Ing. C. Westerkamp 16 AUTOMATISCHES ÜBERSETZEN VON PROGRAMMEN MIT MAKE... 2 16.1
Praktikum Mikrocomputertechnik
 Anleitung zum Praktikum Mikrocomputertechnik Im Praktikum wird der Mikrocontroller 68332 von Motorola verwendet. Dieser Mikrocontroller besteht aus einer 32-Bit CPU und integrierten Peripheriebausteinen
Anleitung zum Praktikum Mikrocomputertechnik Im Praktikum wird der Mikrocontroller 68332 von Motorola verwendet. Dieser Mikrocontroller besteht aus einer 32-Bit CPU und integrierten Peripheriebausteinen
Praktikum Mikrorechner 1 (Einführung)
") G. Kemnitz Institut für Informatik, Technische Universität Clausthal November 5, 2014 1/16 Praktikum Mikrorechner 1 (Einführung) G. Kemnitz Institut für Informatik, Technische Universität Clausthal November
G. Kemnitz Institut für Informatik, Technische Universität Clausthal November 5, 2014 1/16 Praktikum Mikrorechner 1 (Einführung) G. Kemnitz Institut für Informatik, Technische Universität Clausthal November
LCD-Display am MVUS 80535 (nur einfachste Betriebsweise im Text Display Modus - ausführliche Beschreibung )
") Prof. Komar - 1 - LCD-Display LCD-Display am MVUS 80535 (nur einfachste Betriebsweise im Text Display Modus - ausführliche Beschreibung ) Das LCD-Modul TLX-1021 besteht aus einem - LCD-Panel mit 120 x
Prof. Komar - 1 - LCD-Display LCD-Display am MVUS 80535 (nur einfachste Betriebsweise im Text Display Modus - ausführliche Beschreibung ) Das LCD-Modul TLX-1021 besteht aus einem - LCD-Panel mit 120 x
1.7 Assembler Programmierung
 1.7 Assembler Programmierung Die nach außen sichtbare Programmierschnittstelle eines Prozessors ist der Befehlscode. Dies ist eine binäre Dateninformation, die vom Prozessor Byte für Byte abgearbeitet
1.7 Assembler Programmierung Die nach außen sichtbare Programmierschnittstelle eines Prozessors ist der Befehlscode. Dies ist eine binäre Dateninformation, die vom Prozessor Byte für Byte abgearbeitet
Übungscomputer mit Prozessor 8085 - Bedienungsanleitung
 Seite 1 von 9 Pinbelegung der Steckerleisten im Übungsgerät Seite 2 von 9 Inbetriebnahme: Schalter S1, S2, und S3 in Stellung 1 (oben) schalten. Spannung 5 V anlegen. ACHTUNG auf Polarität achten. Taste
Seite 1 von 9 Pinbelegung der Steckerleisten im Übungsgerät Seite 2 von 9 Inbetriebnahme: Schalter S1, S2, und S3 in Stellung 1 (oben) schalten. Spannung 5 V anlegen. ACHTUNG auf Polarität achten. Taste
Erste Schritte mit Eclipse
 Erste Schritte mit Eclipse März 2008, KLK 1) Java Development Kit (JDK) und Eclipse installieren In den PC-Pools der HAW sind der JDK und Eclipse schon installiert und können mit dem Application Launcher
Erste Schritte mit Eclipse März 2008, KLK 1) Java Development Kit (JDK) und Eclipse installieren In den PC-Pools der HAW sind der JDK und Eclipse schon installiert und können mit dem Application Launcher
Zusammenfassung der Assemblerbefehle des 8051
 Zusammenfassung der Assemblerbefehle des 8051 Seite 1 von 5 Befehl Bezeichnung Syntax Wirkung / Beispiel Befehle zum Datentransfer MOV Move MOV [Ziel],[Quelle] MOV P1,P3 Kopiert den Inhalt von P3 nach
Zusammenfassung der Assemblerbefehle des 8051 Seite 1 von 5 Befehl Bezeichnung Syntax Wirkung / Beispiel Befehle zum Datentransfer MOV Move MOV [Ziel],[Quelle] MOV P1,P3 Kopiert den Inhalt von P3 nach
Visual Basic Editor CATIA V5
 Visual Basic Editor CATIA V5 Daniel Frauenrath Allgemein Der Visual Basic Editor ist fester Bestandteil von CATIA V5. Im Gegensatz zum internen Editor für CATScript und CATVbs hat der Visual Basic Editor
Visual Basic Editor CATIA V5 Daniel Frauenrath Allgemein Der Visual Basic Editor ist fester Bestandteil von CATIA V5. Im Gegensatz zum internen Editor für CATScript und CATVbs hat der Visual Basic Editor
Unter Project New µvision Project kann ein neues Projekt angelegt werden.
 KURZBESCHREIBUNG ZUM ERSTELLEN EINES PROJEKTES MIT µvision4 NEUES PROJEKT ANLEGEN Unter Project New µvision Project kann ein neues Projekt angelegt werden. Es öffnet sich ein Dialogfenster, in dem der
KURZBESCHREIBUNG ZUM ERSTELLEN EINES PROJEKTES MIT µvision4 NEUES PROJEKT ANLEGEN Unter Project New µvision Project kann ein neues Projekt angelegt werden. Es öffnet sich ein Dialogfenster, in dem der
BASIC-Tiger Starter Kit. Tel: +49 (241) Fax: +49 (241)
 Fax: +49 (241)") BASIC-Tiger Starter Kit Tel: +49 (241) 918 900 Fax: +49 (241) 918 9044 Email: info@wilke.de 1 2 Wilke Technology GmbH Krefelder Str. 147 52070 Aachen Germany BASIC-Tiger Starter Kit Willkommen beim BASIC-Tiger
BASIC-Tiger Starter Kit Tel: +49 (241) 918 900 Fax: +49 (241) 918 9044 Email: info@wilke.de 1 2 Wilke Technology GmbH Krefelder Str. 147 52070 Aachen Germany BASIC-Tiger Starter Kit Willkommen beim BASIC-Tiger
Rechnerarchitektur, Einführung in die Laborübungen
 Rechnerarchitektur, Einführung in die Laborübungen G. Kemnitz 24. November 2016 Inbetriebnahme der Mikrorechnerbaudruppe 1. Anschluss 5V-Netzteil 2. Anschluss Programmer 3. Einschalter 4. Eingabeschalter
Rechnerarchitektur, Einführung in die Laborübungen G. Kemnitz 24. November 2016 Inbetriebnahme der Mikrorechnerbaudruppe 1. Anschluss 5V-Netzteil 2. Anschluss Programmer 3. Einschalter 4. Eingabeschalter
3 Der Debugger. 3.1 Überblick. 3.2 Einschränkungen
 3 Der Debugger 3.1 Überblick Die Funktion des Debuggers beruht darauf, dass an das Ende des zu debuggenden Programms ein Monitor mit einer Länge von knapp 1 kbyte angehängt wird. Dieser Monitor wird nach
3 Der Debugger 3.1 Überblick Die Funktion des Debuggers beruht darauf, dass an das Ende des zu debuggenden Programms ein Monitor mit einer Länge von knapp 1 kbyte angehängt wird. Dieser Monitor wird nach
Name : Klasse : Punkte : Note :
 Name : Klasse : Punkte : Note : Zeit: 08.00 bis 09.30 Es dürfen alle Unterlagen verwendet werden. Die Aufgaben sind möglichst direkt auf den Blättern zu lösen (Antworten bitte in ganzen Sätzen!), bei Bedarf
Name : Klasse : Punkte : Note : Zeit: 08.00 bis 09.30 Es dürfen alle Unterlagen verwendet werden. Die Aufgaben sind möglichst direkt auf den Blättern zu lösen (Antworten bitte in ganzen Sätzen!), bei Bedarf
Visualisierung der Funktionsweise des Advanced Encrytion Standard (AES) Benutzerhandbuch
 Benutzerhandbuch") Visualisierung der Funktionsweise des Advanced Encrytion Standard (AES) Benutzerhandbuch Claude Petry Projektarbeit im Bachelor Studiengang Informatik Bearbeitungszeitraum: Sommersemester 2007 Betreuer:
Visualisierung der Funktionsweise des Advanced Encrytion Standard (AES) Benutzerhandbuch Claude Petry Projektarbeit im Bachelor Studiengang Informatik Bearbeitungszeitraum: Sommersemester 2007 Betreuer:
Speicheraufbau des AT89C5131
 Speicheraufbau des AT89C5131 Prinzip: - getrennter Programmspeicher (ROM) und Datenspeicher (RAM) - interner Speicher (auf dem Chip) und externer Speicher (Zusatzbausteine) Das Experimentalsystem hat keinen
Speicheraufbau des AT89C5131 Prinzip: - getrennter Programmspeicher (ROM) und Datenspeicher (RAM) - interner Speicher (auf dem Chip) und externer Speicher (Zusatzbausteine) Das Experimentalsystem hat keinen
Drucken und Löschen von angehaltenen Druckaufträgen Erkennen von Formatierungsfehlern Bestätigen von Druckaufträgen Reservieren von Druckaufträgen
 Beim Senden eines Druckauftrags an den Drucker können Sie im Treiber angeben, daß der Drucker den Auftrag im Speicher zurückhalten soll. Wenn Sie zum Drucken des Auftrags bereit sind, müssen Sie an der
Beim Senden eines Druckauftrags an den Drucker können Sie im Treiber angeben, daß der Drucker den Auftrag im Speicher zurückhalten soll. Wenn Sie zum Drucken des Auftrags bereit sind, müssen Sie an der
Leitfaden für die Installation der freien Virtual Machine. C-MOR Videoüberwachung auf einem VMware ESX Server
 Diese Anleitung illustriert die Installation der Videoüberwachung C-MOR Virtuelle Maschine auf VMware ESX Server. Diese Anleitung bezieht sich auf die Version 4 mit 64-Bit C-MOR-Betriebssystem. Bitte laden
Diese Anleitung illustriert die Installation der Videoüberwachung C-MOR Virtuelle Maschine auf VMware ESX Server. Diese Anleitung bezieht sich auf die Version 4 mit 64-Bit C-MOR-Betriebssystem. Bitte laden
Leitfaden für die Installation der freien Virtual Machine C-MOR Videoüberwachung auf einem Microsoft Hyper-V-Server
 Dieser Leitfaden zeigt die Installation der. Microsoft Hyper-V 2012 kann unter http://www.microsoft.com/en-us/server-cloud/hyper-v-server/ runtergeladen werden. Microsoft Hyper-V 2008 R2 kann unter http://www.microsoft.com/dede/download/details.aspx?id=3512
Dieser Leitfaden zeigt die Installation der. Microsoft Hyper-V 2012 kann unter http://www.microsoft.com/en-us/server-cloud/hyper-v-server/ runtergeladen werden. Microsoft Hyper-V 2008 R2 kann unter http://www.microsoft.com/dede/download/details.aspx?id=3512
Installation & Usage. Version 1.0. estickflashtool
 Installation & Usage Version 1.0 estickflashtool Allgemeines Der estick ist ein USB basiertes Entwicklungs-Board für Atmel AT90USB162 Mikro-controller. Einfache, anschauliche Anwendungen und Beispiele
Installation & Usage Version 1.0 estickflashtool Allgemeines Der estick ist ein USB basiertes Entwicklungs-Board für Atmel AT90USB162 Mikro-controller. Einfache, anschauliche Anwendungen und Beispiele
Ergänzungen zum Manual OS V 2.05/2.06
 Ergänzungen zum Manual OS V 2.05/2.06 SYSTEMRESOURCEN - PROGRAMM DOWNLOAD - Ab der Betriebssystemversion 2.05 haben die C-Control Units M-2.0 und Station 2.0 die Möglichkeit das Anwenderprogramm von einem
Ergänzungen zum Manual OS V 2.05/2.06 SYSTEMRESOURCEN - PROGRAMM DOWNLOAD - Ab der Betriebssystemversion 2.05 haben die C-Control Units M-2.0 und Station 2.0 die Möglichkeit das Anwenderprogramm von einem
Aufsetzen und Debuggen eines CCSv5-Projektes für DSK6713- oder DUETT-Board 1
 Praktikum Digitale Signalverarbeitung Digital Signal Processing Lab HAW Hamburg Fakultät TI Technik und Informatik Department Informations- und Elektrotechnik Labor für Signalverarbeitung Aufsetzen und
Praktikum Digitale Signalverarbeitung Digital Signal Processing Lab HAW Hamburg Fakultät TI Technik und Informatik Department Informations- und Elektrotechnik Labor für Signalverarbeitung Aufsetzen und
Einführung in MS Visual Studio 2008
 Einführung in MS Visual Studio 2008 1. Erste Projektmappe, erstes Projekt und erstes C++-Programm Visual Studio 2008 unterstützt die Organisation von Programmierprojekten in Form von Lösungen, d.h. Gruppen
Einführung in MS Visual Studio 2008 1. Erste Projektmappe, erstes Projekt und erstes C++-Programm Visual Studio 2008 unterstützt die Organisation von Programmierprojekten in Form von Lösungen, d.h. Gruppen
 TECHNISCHE HOCHSCHULE NÜRNBERG GEORG SIMON OHM Die Mikroprogrammebene eines Rechners Das Abarbeiten eines Arbeitszyklus eines einzelnen Befehls besteht selbst wieder aus verschiedenen Schritten, z.b. Befehl
TECHNISCHE HOCHSCHULE NÜRNBERG GEORG SIMON OHM Die Mikroprogrammebene eines Rechners Das Abarbeiten eines Arbeitszyklus eines einzelnen Befehls besteht selbst wieder aus verschiedenen Schritten, z.b. Befehl
Eine Kommando-Oberfläche für.net
 Institut für Systemsoftware O.Univ.-Prof. Dr. Hanspeter Mössenböck Eine Kommando-Oberfläche für.net In.NET (wie auch in vielen anderen Systemen) haben Programme nur einen einzigen Eintrittspunkt (ihre
Institut für Systemsoftware O.Univ.-Prof. Dr. Hanspeter Mössenböck Eine Kommando-Oberfläche für.net In.NET (wie auch in vielen anderen Systemen) haben Programme nur einen einzigen Eintrittspunkt (ihre
Installation LehrerConsole (Version 7.2)
") Dr. Kaiser Systemhaus GmbH Köpenicker Straße 325 12555 Berlin Telefon: (0 30) 65 76 22 36 Telefax: (0 30) 65 76 22 38 E-Mail: info@dr-kaiser.de Internet: www.dr-kaiser.de Installation LehrerConsole (Version
Dr. Kaiser Systemhaus GmbH Köpenicker Straße 325 12555 Berlin Telefon: (0 30) 65 76 22 36 Telefax: (0 30) 65 76 22 38 E-Mail: info@dr-kaiser.de Internet: www.dr-kaiser.de Installation LehrerConsole (Version
Echtzeit-Multitasking
 Technische Informatik Klaus-Dieter Thies Echtzeit-Multitasking Memory Management und System Design im Protected Mode der x86/pentium-architektur. Shaker Verlag Aachen 2002 Die Deutsche Bibliothek - CIP-Einheitsaufnahme
Technische Informatik Klaus-Dieter Thies Echtzeit-Multitasking Memory Management und System Design im Protected Mode der x86/pentium-architektur. Shaker Verlag Aachen 2002 Die Deutsche Bibliothek - CIP-Einheitsaufnahme
Dokumentation IBIS Master Version 1.5.6
 Dokumentation IBIS Master Version 1.5.6 Seite 1 von 9 11.01.06 Inhaltsverzeichnis 1. Einleitung... 3 2. Hardware IBIS Master... 4 3. Software IBIS Master..... 5 3.1 Installation und Programmstart... 5
Dokumentation IBIS Master Version 1.5.6 Seite 1 von 9 11.01.06 Inhaltsverzeichnis 1. Einleitung... 3 2. Hardware IBIS Master... 4 3. Software IBIS Master..... 5 3.1 Installation und Programmstart... 5
Mikrocomputertechnik. Thema: Der Aufbau des XC888-Mikrocontrollers -Teil 1 -
 Mikrocomputertechnik Thema: Der Aufbau des XC888-Mikrocontrollers -Teil 1 - Mikroprozessor-Achritekturen Folie 2 Mikroprozessor-Achritekturen Klassifizierung anhand Wortbreite CPU-Architektur und Busleitungen
Mikrocomputertechnik Thema: Der Aufbau des XC888-Mikrocontrollers -Teil 1 - Mikroprozessor-Achritekturen Folie 2 Mikroprozessor-Achritekturen Klassifizierung anhand Wortbreite CPU-Architektur und Busleitungen
Name: ES2 Klausur Thema: ARM 25.6.07. Name: Punkte: Note:
 Name: Punkte: Note: Hinweise für das Lösen der Aufgaben: Zeit: 95 min. Name nicht vergessen! Geben Sie alle Blätter ab. Die Reihenfolge der Aufgaben ist unabhängig vom Schwierigkeitsgrad. Erlaubte Hilfsmittel
Name: Punkte: Note: Hinweise für das Lösen der Aufgaben: Zeit: 95 min. Name nicht vergessen! Geben Sie alle Blätter ab. Die Reihenfolge der Aufgaben ist unabhängig vom Schwierigkeitsgrad. Erlaubte Hilfsmittel
BKSYS Brandschutzklappen-Kleinsteuerung
 Software-Bedienungsanleitung BKSYS Brandschutzklappen-Kleinsteuerung Inhaltsverzeichnis Übersicht und Sprache... 2 Verbindung... 3 Zustand... 4 Protokoll... 5 Einstellung... 7 SCHAKO Ferdinand Schad KG
Software-Bedienungsanleitung BKSYS Brandschutzklappen-Kleinsteuerung Inhaltsverzeichnis Übersicht und Sprache... 2 Verbindung... 3 Zustand... 4 Protokoll... 5 Einstellung... 7 SCHAKO Ferdinand Schad KG
Überblick: Programmierung der USB-Boards. Erstmalige Inbetriebnahme. Programmiervorgang:
 Überblick: Programmierung der USB-Boards Erstmalige Inbetriebnahme Flip 2.4.6 installieren, Installationspfad ohne Punkte und Leerzeichen wählen! Board an die USB-Schnittstelle anschließen Schiebeschalter
Überblick: Programmierung der USB-Boards Erstmalige Inbetriebnahme Flip 2.4.6 installieren, Installationspfad ohne Punkte und Leerzeichen wählen! Board an die USB-Schnittstelle anschließen Schiebeschalter
Eclipse Tutorial.doc
 Berner Fachhochschule Hochschule für Technik und Informatik, HTI Fachbereich Elektro- und Kommunikationstechnik Labor für Technische Informatik Eclipse Tutorial 2005, HTI Burgdorf R. Weber Dateiname: Eclipse
Berner Fachhochschule Hochschule für Technik und Informatik, HTI Fachbereich Elektro- und Kommunikationstechnik Labor für Technische Informatik Eclipse Tutorial 2005, HTI Burgdorf R. Weber Dateiname: Eclipse
Version 0.3. Installation von MinGW und Eclipse CDT
 Version 0.3 Installation von MinGW und Eclipse CDT 1. Stellen Sie fest, ob Sie Windows in der 32 Bit Version oder in der 64 Bit Version installiert haben. 2. Prüfen Sie, welche Java Runtime vorhanden ist.
Version 0.3 Installation von MinGW und Eclipse CDT 1. Stellen Sie fest, ob Sie Windows in der 32 Bit Version oder in der 64 Bit Version installiert haben. 2. Prüfen Sie, welche Java Runtime vorhanden ist.
ANT-5 Software Upgrade - Installationshinweise
 ANT-5 Software Upgrade - Installationshinweise Der SDH-Zugangstester ANT-5 von Acterna wird ständig verbessert und weiterentwickelt. Daher stehen regelmäßig neue Funktionen und Optionen zur Verfügung.
ANT-5 Software Upgrade - Installationshinweise Der SDH-Zugangstester ANT-5 von Acterna wird ständig verbessert und weiterentwickelt. Daher stehen regelmäßig neue Funktionen und Optionen zur Verfügung.
Microsoft 2010 Express/Beispiel für Grafische Oberflächen
 I Vorbereitung wie Konsolanwendung Rechner hochfahren - Visual C++ 2010 Express aufrufen Datei/neu/Projekt im Menue wählen II Projekt und Projektmappe anlegen Vorlage CLR markieren Projekttyp Windows Forms-Anwendung
I Vorbereitung wie Konsolanwendung Rechner hochfahren - Visual C++ 2010 Express aufrufen Datei/neu/Projekt im Menue wählen II Projekt und Projektmappe anlegen Vorlage CLR markieren Projekttyp Windows Forms-Anwendung
Verwenden der Druck- und Zurückhaltefunktion 1
 Verwenden der Druck- und Zurückhaltefunktion 1 Beim Senden eines Druckauftrags an den Drucker können Sie im Treiber angeben, daß der Drucker den Auftrag im Speicher zurückhalten und nicht sofort drucken
Verwenden der Druck- und Zurückhaltefunktion 1 Beim Senden eines Druckauftrags an den Drucker können Sie im Treiber angeben, daß der Drucker den Auftrag im Speicher zurückhalten und nicht sofort drucken
Unterprogramme. Unterprogramme
 Unterprogramme Unterprogramme wichtiges Hilfsmittel für mehrfach benötigte Programmabschnitte spielen in höheren Programmiersprachen eine wesentliche Rolle in Assembler sind bestimmte Konventionen nötig
Unterprogramme Unterprogramme wichtiges Hilfsmittel für mehrfach benötigte Programmabschnitte spielen in höheren Programmiersprachen eine wesentliche Rolle in Assembler sind bestimmte Konventionen nötig
Handbuch. TC3 Remote Manager. TwinCAT 3. Version: Datum:
 Handbuch TC3 Remote Manager TwinCAT 3 Version: Datum: 1.0 28.12.2016 Inhaltsverzeichnis Inhaltsverzeichnis 1 Einleitung... 4 2 TwinCAT Integration... 5 3 Anwendungsfälle... 7 4 Hinweise... 10 TC3 Remote
Handbuch TC3 Remote Manager TwinCAT 3 Version: Datum: 1.0 28.12.2016 Inhaltsverzeichnis Inhaltsverzeichnis 1 Einleitung... 4 2 TwinCAT Integration... 5 3 Anwendungsfälle... 7 4 Hinweise... 10 TC3 Remote
HD44780-LC-Display am Atmel-AVR Mikrocontroller
 Fachbereich Elektrotechnik und Informatik Labor für Angewandte Informatik und Datenbanken Praktikum Automatisierung / Echtzeitregelung (BAU/BER) Prof.Dr.-Ing. Coersmeier HD44780-LC-Display am Atmel-AVR
Fachbereich Elektrotechnik und Informatik Labor für Angewandte Informatik und Datenbanken Praktikum Automatisierung / Echtzeitregelung (BAU/BER) Prof.Dr.-Ing. Coersmeier HD44780-LC-Display am Atmel-AVR
OTOsuite. Installationshandbuch. Deutsch
 OTOsuite Installationshandbuch Deutsch In diesem Dokument wird die Installation der OTOsuite-Software von einer DVD, einem Speicherstick oder aus einer komprimierten Datei beschrieben. Systemanforderungen
OTOsuite Installationshandbuch Deutsch In diesem Dokument wird die Installation der OTOsuite-Software von einer DVD, einem Speicherstick oder aus einer komprimierten Datei beschrieben. Systemanforderungen
Von-Neumann-Architektur
 Von-Neumann-Architektur Bisher wichtig: Konstruktionsprinzip des Rechenwerkes und Leitwerkes. Neu: Größerer Arbeitsspeicher Ein- und Ausgabewerk (Peripherie) Rechenwerk (ALU) Steuerwerk (CU) Speicher...ppppp...dddddd..
Von-Neumann-Architektur Bisher wichtig: Konstruktionsprinzip des Rechenwerkes und Leitwerkes. Neu: Größerer Arbeitsspeicher Ein- und Ausgabewerk (Peripherie) Rechenwerk (ALU) Steuerwerk (CU) Speicher...ppppp...dddddd..
Leitfaden für die Installation der Videoüberwachung C-MOR
 Dieser Leitfaden zeigt die Installation der C-MOR Videoüberwachung als VM mit der freien Software VirtualBox von Oracle. Die freie VM Version von C-MOR gibt es hier: http://www.c-mor.de/download-vm.php
Dieser Leitfaden zeigt die Installation der C-MOR Videoüberwachung als VM mit der freien Software VirtualBox von Oracle. Die freie VM Version von C-MOR gibt es hier: http://www.c-mor.de/download-vm.php
Praktikum Ingenieurinformatik. Termin 1. Textdateien (ASCII, Unicode) Mein erstes C-Programm
 Mein erstes C-Programm") Praktikum Ingenieurinformatik Termin 1 Textdateien (ASCII, Unicode) Mein erstes C-Programm 1 1. Aufbau des EDV-Labors 2. Text-Editor (ASCII-Editor) 3. Mein erstes C-Programm 4. Installation von Visual
Praktikum Ingenieurinformatik Termin 1 Textdateien (ASCII, Unicode) Mein erstes C-Programm 1 1. Aufbau des EDV-Labors 2. Text-Editor (ASCII-Editor) 3. Mein erstes C-Programm 4. Installation von Visual
Ausbildungsunterlage für die durchgängige Automatisierungslösung Totally Integrated Automation (T I A) MODUL A6. SPS-Simulation mit S7-PLCSIM
 MODUL A6. SPS-Simulation mit S7-PLCSIM") Ausbildungsunterlage für die durchgängige Automatisierungslösung Totally Integrated Automation (T I A) MODUL A6 SPS- Simulation mit S7-PLCSIM T I A Ausbildungsunterlage Seite 1 von 14 Modul A6 Diese Unterlage
Ausbildungsunterlage für die durchgängige Automatisierungslösung Totally Integrated Automation (T I A) MODUL A6 SPS- Simulation mit S7-PLCSIM T I A Ausbildungsunterlage Seite 1 von 14 Modul A6 Diese Unterlage
Verwenden der Druck- und Zurückhaltefunktion
 Beim Senden eines Druckauftrags an den Drucker können Sie im Treiber angeben, daß der Drucker den Auftrag im Speicher zurückhalten und nicht sofort drucken soll. Wenn Sie zum Drucken des Auftrags bereit
Beim Senden eines Druckauftrags an den Drucker können Sie im Treiber angeben, daß der Drucker den Auftrag im Speicher zurückhalten und nicht sofort drucken soll. Wenn Sie zum Drucken des Auftrags bereit
SilverFast - Pioneer in Digital Imaging. SilverFast 8. Professionelle Scanner-Software Professionelle Bildbearbeitungs-Software DEUTSCH.
 SilverFast - Pioneer in Digital Imaging SilverFast 8 Professionelle Scanner-Software Professionelle Bildbearbeitungs-Software DEUTSCH ColorServer SilverFast ColorServer Die SilverFast ColorServer-Funktionalität
SilverFast - Pioneer in Digital Imaging SilverFast 8 Professionelle Scanner-Software Professionelle Bildbearbeitungs-Software DEUTSCH ColorServer SilverFast ColorServer Die SilverFast ColorServer-Funktionalität
2.3 - Das Verwaltungsmodul moveon installieren - SQL-Version
 2.3 - Das Verwaltungsmodul moveon installieren - SQL-Version Das Verwaltungsmodul moveon besteht aus zwei Komponenten: dem moveon Client und der moveon Datenbank. Der moveon Client enthält alle Formulare,
2.3 - Das Verwaltungsmodul moveon installieren - SQL-Version Das Verwaltungsmodul moveon besteht aus zwei Komponenten: dem moveon Client und der moveon Datenbank. Der moveon Client enthält alle Formulare,
DALI Cockpit Verwendung von Makros
 DALI Cockpit Verwendung von Makros Individuelle Konfiguration von Funktionen 2016, Lunatone Industrielle Elektronik GmbH DALI Cockpit Verwendung von Makros Content 1. Was versteht man unter Makros in Zusammenhang
DALI Cockpit Verwendung von Makros Individuelle Konfiguration von Funktionen 2016, Lunatone Industrielle Elektronik GmbH DALI Cockpit Verwendung von Makros Content 1. Was versteht man unter Makros in Zusammenhang
10. Die Adressierungsarten des MSP 430
 10. Die Adressierungsarten 10.1 Übersicht über die Adressierungsarten 10.2 -Operanden 10.3 Indexregister mit Distanz 10.4 Symbolische (relativ zum ) 10.5 Absolute 10.6 Indirekte 10.7 Indirekte Adressierung
10. Die Adressierungsarten 10.1 Übersicht über die Adressierungsarten 10.2 -Operanden 10.3 Indexregister mit Distanz 10.4 Symbolische (relativ zum ) 10.5 Absolute 10.6 Indirekte 10.7 Indirekte Adressierung
$NOMOD51 $INCLUDE (reg515.inc) ; Ein Zeichen auf Tastendruck S1 senden...
 ; Ein Zeichen auf Tastendruck S1 senden...") MC SS2016 - Aufgabenblatt 11a - Übung 4 Serielle Schnittstelle - Zeichen sen & empfangen In diesem Versuch lernen Sie die serielle Schnittstelle des AT89C5131 Mikrocontrollers kennen. Im ersten Versuchsteil
MC SS2016 - Aufgabenblatt 11a - Übung 4 Serielle Schnittstelle - Zeichen sen & empfangen In diesem Versuch lernen Sie die serielle Schnittstelle des AT89C5131 Mikrocontrollers kennen. Im ersten Versuchsteil
Kurzanleitung zur Benutzung der Entwicklungsumgebung Code::Blocks für die Übung aus Programmieren 1 und 2
 Kurzanleitung zur Benutzung der Entwicklungsumgebung Code::Blocks für die Übung aus Programmieren 1 und 2 Institut für Mikroelektronik, TU Wien 8. Oktober 2009 Dieses Dokument ist für den schnellen Einstieg
Kurzanleitung zur Benutzung der Entwicklungsumgebung Code::Blocks für die Übung aus Programmieren 1 und 2 Institut für Mikroelektronik, TU Wien 8. Oktober 2009 Dieses Dokument ist für den schnellen Einstieg
Praktikum Ingenieurinformatik. Termin 2. Mein erstes C-Programm
 Praktikum Ingenieurinformatik Termin 2 Mein erstes C-Programm 1 1. Einleitung 2. Erstes C-Programm 3. Fehler ins Programm einbauen 4. Zweites und drittes C-Programm 5. Installation der Visual C++ 2010
Praktikum Ingenieurinformatik Termin 2 Mein erstes C-Programm 1 1. Einleitung 2. Erstes C-Programm 3. Fehler ins Programm einbauen 4. Zweites und drittes C-Programm 5. Installation der Visual C++ 2010
Der MS-DOS Standardmonitor und Debugger DEBUG
 Einfache Assemblerprogrammierung mit DOS-DEBUG 1/7 Auf Personalcomputern kann in der Regel leicht eine einfache Umgebung zur Software-Entwicklung für die Intel Rechnerfamilie 80x86 eingerichtet werden.
Einfache Assemblerprogrammierung mit DOS-DEBUG 1/7 Auf Personalcomputern kann in der Regel leicht eine einfache Umgebung zur Software-Entwicklung für die Intel Rechnerfamilie 80x86 eingerichtet werden.
Fuses mit BASCOM und USBASP setzen
 Auch wenn mir dieser Programmteil von BASCOM wenig gefällt und es hübschere Programme zum Setzen der AVR Fusebits gibt, sei's drum. Es gibt immer wieder OM's, die danach fragen. Zugute halten kann man,
Auch wenn mir dieser Programmteil von BASCOM wenig gefällt und es hübschere Programme zum Setzen der AVR Fusebits gibt, sei's drum. Es gibt immer wieder OM's, die danach fragen. Zugute halten kann man,
Zähler- und Zeitgeber-Baugruppen
 Zähler- und Zeitgeber-Baugruppen Sinn: häufig müssen Zeitbedingungen eingehalten werden z.b.: einige ms warten, Häufigkeit von Ereignissen zählen etc... Lösung: 1.) Zeitschleifen = Programm abarbeiten,
Zähler- und Zeitgeber-Baugruppen Sinn: häufig müssen Zeitbedingungen eingehalten werden z.b.: einige ms warten, Häufigkeit von Ereignissen zählen etc... Lösung: 1.) Zeitschleifen = Programm abarbeiten,
Der Toy Rechner Ein einfacher Mikrorechner
 Der Toy Rechner Ein einfacher Mikrorechner Dr. Gerald Heim Haid-und-Neu-Str. 10-14 76131 Karlsruhe 16. Mai 1995 Allgemeine Informationen 2 Quelle: Phil Kopmann, Microcoded versus Hard-Wired Logic, Byte
Der Toy Rechner Ein einfacher Mikrorechner Dr. Gerald Heim Haid-und-Neu-Str. 10-14 76131 Karlsruhe 16. Mai 1995 Allgemeine Informationen 2 Quelle: Phil Kopmann, Microcoded versus Hard-Wired Logic, Byte
Architektur der Intel 8051 Familie und Grundlegende Programmierung Reto Gurtner 2005
 Architektur der Intel 8051 Familie und Grundlegende Programmierung Reto Gurtner 2005 1 1. DIE GESCHICHTE DER 8051-MIKROCONTROLLERFAMILE 4 2. GRUNDLEGENDE HARDWARESTRUKTUR UND FUNKTIONSMODELL 5 2.1 HARDWARESTRUKTUR
Architektur der Intel 8051 Familie und Grundlegende Programmierung Reto Gurtner 2005 1 1. DIE GESCHICHTE DER 8051-MIKROCONTROLLERFAMILE 4 2. GRUNDLEGENDE HARDWARESTRUKTUR UND FUNKTIONSMODELL 5 2.1 HARDWARESTRUKTUR
FAQ Frequently Asked Questions. Produktname AFPS Outlook-AddIn Version 1.63 Stand Inhalt
 FAQ Frequently Asked Questions Produktname AFPS Outlook-AddIn Version 1.63 Stand 05.02.2006 Inhalt Inhalt...1 1. Installation des AddIns...2 Deinstallation der Version 1.62...2 Installation verschiedener
FAQ Frequently Asked Questions Produktname AFPS Outlook-AddIn Version 1.63 Stand 05.02.2006 Inhalt Inhalt...1 1. Installation des AddIns...2 Deinstallation der Version 1.62...2 Installation verschiedener
Installation der Programme zur Modellbahnsteuerung GROUPIE-MEB-Tron
 Installation der Programme zur Modellbahnsteuerung GROUPIE-MEB-Tron Die Software zum Betrieb der digitalen Blocksteuerung gliedert sich in zwei Teile: Konf_Test: Einstellung und Test der Hardware der Modellbahnsteuerung
Installation der Programme zur Modellbahnsteuerung GROUPIE-MEB-Tron Die Software zum Betrieb der digitalen Blocksteuerung gliedert sich in zwei Teile: Konf_Test: Einstellung und Test der Hardware der Modellbahnsteuerung
Bedienungsanleitung MT 4007 MedioControl
 R Bedienungsanleitung MT 4007 MedioControl Inhaltsverzeichnis Inhaltsverzeichnis... 2 Einleitung... 3 Vorraussetzungen... 3 Installation... 3 Speicher verwalten und anzeigen... 4 Speicher und Timer zum
R Bedienungsanleitung MT 4007 MedioControl Inhaltsverzeichnis Inhaltsverzeichnis... 2 Einleitung... 3 Vorraussetzungen... 3 Installation... 3 Speicher verwalten und anzeigen... 4 Speicher und Timer zum
SPS S90U. 1. Grundlagen SPS Funktion
 1. Grundlagen SPS 1.1. Funktion SPS bedeutet Speicher-Programmierbare Steuerung. Damit ist auch die Zielsetzung einer SPS erklärt: Über einen Speicher und einen Prozessor soll die Funktion von elektronischen
1. Grundlagen SPS 1.1. Funktion SPS bedeutet Speicher-Programmierbare Steuerung. Damit ist auch die Zielsetzung einer SPS erklärt: Über einen Speicher und einen Prozessor soll die Funktion von elektronischen
Rechnerarchitektur Atmega 32. 1 Vortrag Atmega 32. Von Urs Müller und Marion Knoth. Urs Müller Seite 1 von 7
 1 Vortrag Atmega 32 Von Urs Müller und Marion Knoth Urs Müller Seite 1 von 7 Inhaltsverzeichnis 1 Vortrag Atmega 32 1 1.1 Einleitung 3 1.1.1 Hersteller ATMEL 3 1.1.2 AVR - Mikrocontroller Familie 3 2 Übersicht
1 Vortrag Atmega 32 Von Urs Müller und Marion Knoth Urs Müller Seite 1 von 7 Inhaltsverzeichnis 1 Vortrag Atmega 32 1 1.1 Einleitung 3 1.1.1 Hersteller ATMEL 3 1.1.2 AVR - Mikrocontroller Familie 3 2 Übersicht
BIO-SETUP UND SICHERHEIT
 K A P I T E L 2 BIO-SETUP UND SICHERHEIT In diesem Kapitel wird erklärt, wie Sie mittels BIOS-Setup-Menü verschiedene Hardware-Einstellungen vornehmen können. Außerdem erfahren Sie Wissenswertes über eingebaute
K A P I T E L 2 BIO-SETUP UND SICHERHEIT In diesem Kapitel wird erklärt, wie Sie mittels BIOS-Setup-Menü verschiedene Hardware-Einstellungen vornehmen können. Außerdem erfahren Sie Wissenswertes über eingebaute
Leitfaden für die Installation der Videoüberwachung C-MOR
 Dieser Leitfaden zeigt die Installation der C-MOR Videoüberwachung als VM mit der freien Software VirtualBox von Oracle. Die freie VM Version von C-MOR gibt es hier: https://www.c-mor.de/videoueberwachung-download/download-software
Dieser Leitfaden zeigt die Installation der C-MOR Videoüberwachung als VM mit der freien Software VirtualBox von Oracle. Die freie VM Version von C-MOR gibt es hier: https://www.c-mor.de/videoueberwachung-download/download-software
Übung Verwenden des Boot-Systembefehls
 Übung 5.1.3 Verwenden des Boot-Systembefehls Lernziel Anzeigen von Informationen über das aktuell ausgeführte Cisco IOS-Abbild (die Software) Feststellen, von wo das IOS gestartet wird Überprüfen der Größe
Übung 5.1.3 Verwenden des Boot-Systembefehls Lernziel Anzeigen von Informationen über das aktuell ausgeführte Cisco IOS-Abbild (die Software) Feststellen, von wo das IOS gestartet wird Überprüfen der Größe
BOOTLOADER für AVR-Entwicklungsmodule
 BOOTLOADER für AVR-Entwicklungsmodule mit ATxmega128A1 mit ATxmega256A3 Verzeichnis 1. Einleitung 3 2. Einstellungen 4 2.1. Fuse Bits 4 2.2. AVROSP Programm 5 2.2.1. Erläuterung der BAT-Dateien 5 2.2.2.
BOOTLOADER für AVR-Entwicklungsmodule mit ATxmega128A1 mit ATxmega256A3 Verzeichnis 1. Einleitung 3 2. Einstellungen 4 2.1. Fuse Bits 4 2.2. AVROSP Programm 5 2.2.1. Erläuterung der BAT-Dateien 5 2.2.2.
Flychart Software Installation auf einem Windows PC
 Schliessen Sie das Fluginstrument nicht am PC an, solange Sie die Software- Installation unter Schritt 2 nicht abgeschlossen haben. Die Software ist für folgende Microsoft Betriebssysteme ausgelegt: Windows
Schliessen Sie das Fluginstrument nicht am PC an, solange Sie die Software- Installation unter Schritt 2 nicht abgeschlossen haben. Die Software ist für folgende Microsoft Betriebssysteme ausgelegt: Windows
Programmieren. Wie entsteht ein Programm
 Wie entsteht ein Programm 1/9 1. Schritt: Programmentwurf Der wichtigste Teil beim Erstellen eines Programms ist der Programmentwurf. Dabei wird das vorgegebene Problem analysiert, es wird ermittelt, welche
Wie entsteht ein Programm 1/9 1. Schritt: Programmentwurf Der wichtigste Teil beim Erstellen eines Programms ist der Programmentwurf. Dabei wird das vorgegebene Problem analysiert, es wird ermittelt, welche
Mikrocontrollerprogrammierung in Assembler und C
 mitp Professional Mikrocontrollerprogrammierung in Assembler und C für die Mikrocontroller der 8051-Familie - Simulation unter Multisim von Herbert Bernstein 1. Auflage Mikrocontrollerprogrammierung in
mitp Professional Mikrocontrollerprogrammierung in Assembler und C für die Mikrocontroller der 8051-Familie - Simulation unter Multisim von Herbert Bernstein 1. Auflage Mikrocontrollerprogrammierung in
Wer möchte, kann sein Programm auch auf echter Hardware testen
 U4 3. Übungsaufgabe U4 3. Übungsaufgabe Grundlegendes zur Übung mit dem AVR-μC Register I/O-Ports AVR-Umgebung Peripherie U4.1 U4-1 Grundlegendes zur Übung mit dem AVR-mC U4-1 Grundlegendes zur Übung mit
U4 3. Übungsaufgabe U4 3. Übungsaufgabe Grundlegendes zur Übung mit dem AVR-μC Register I/O-Ports AVR-Umgebung Peripherie U4.1 U4-1 Grundlegendes zur Übung mit dem AVR-mC U4-1 Grundlegendes zur Übung mit
Code Composer Studio 4.x
 Code Composer Studio 4.x Hands-on Session Sebastian Meisner, sebastian.meisner@upb.de Fachgebiet Technische Informatik 1 Inhalt der Hands-on Sesion Präsentation Code Composer Studio (CCS) Aufgaben 2 Einleitung
Code Composer Studio 4.x Hands-on Session Sebastian Meisner, sebastian.meisner@upb.de Fachgebiet Technische Informatik 1 Inhalt der Hands-on Sesion Präsentation Code Composer Studio (CCS) Aufgaben 2 Einleitung
Einführung in das Programmieren mit Visual Studio 2013
 Um ein eigenes Programm auf einem PC zum Laufen zu bringen, sind drei grundlegende Schritte erforderlich. 1. Das Programm muss erdacht und strukturiert werden. Diese Vorbereitung findet zu Hause statt
Um ein eigenes Programm auf einem PC zum Laufen zu bringen, sind drei grundlegende Schritte erforderlich. 1. Das Programm muss erdacht und strukturiert werden. Diese Vorbereitung findet zu Hause statt
Anleitung RIDE-Entwicklungsumgebung für 8051-Controller Seite 1
 Anleitung RIDE-Entwicklungsumgebung für 8051-Controller Seite 1 RIDE-Entwicklungsumgebung für 8051-µC Inhaltsverzeichnis RIDE-Entwicklungsumgebung für 8051-µC... 2 1 Kurzanleitung: Programmierung des Controllers
Anleitung RIDE-Entwicklungsumgebung für 8051-Controller Seite 1 RIDE-Entwicklungsumgebung für 8051-µC Inhaltsverzeichnis RIDE-Entwicklungsumgebung für 8051-µC... 2 1 Kurzanleitung: Programmierung des Controllers
2. Computer (Hardware) K. Bothe, Institut für Informatik, HU Berlin, GdP, WS 2015/16
 K. Bothe, Institut für Informatik, HU Berlin, GdP, WS 2015/16") 2. Computer (Hardware) K. Bothe, Institut für Informatik, HU Berlin, GdP, WS 2015/16 Version: 14. Okt. 2015 Computeraufbau: nur ein Überblick Genauer: Modul Digitale Systeme (2. Semester) Jetzt: Grundverständnis
2. Computer (Hardware) K. Bothe, Institut für Informatik, HU Berlin, GdP, WS 2015/16 Version: 14. Okt. 2015 Computeraufbau: nur ein Überblick Genauer: Modul Digitale Systeme (2. Semester) Jetzt: Grundverständnis