Modellbasiertes Suchen von Objekten
|
|
|
- Linda Hochberg
- vor 6 Jahren
- Abrufe
Transkript
1 Modellbasiertes Suchen von Objekten Anwendung 1 Vortrag HAW-Hamburg Betreuende Professoren Hosnia Najem Kai von Luck Gunter Klemke
2 Agenda Welches Projekt? Motivation Szenario Technologische Anforderungen Zusammenfassung Ausblick 2
3 HAW-Labor Living Place 3
4 HAW-Labor Living Place Sensoren Systeme Usw. Intelligent Home Audio Systeme Kamera Touch- Displays Resolution: HD 1280x720P Tri-Mode Camera (MPG4-1/MPEG4-2/M-Jpeg ) Watchdog / Event log design SD Memory Storage Quelle: 4

5 Motivation Dem Raum Augen verschaffen Quelle: 5

6 Szenario Living Place Kai ist in seiner Wohnung auf der Suche nach: WIESO SELBER SUCHEN? 6
7 Technologische Anforderung Objektsuche Objektmodell erstellen Objekterkennung Objekt im Raum wiederfinden Positionsbestimmung Objekt anzeigen 14. November 2009 AW1 Vortrag Hosnia Najem 7
8 Technologische Anforderung Objektsuche Objektmodell erstellen Objekterkennung Objekt im Raum wiederfinden SIFT Positionsbestimmung Objekt anzeigen CityGML 8
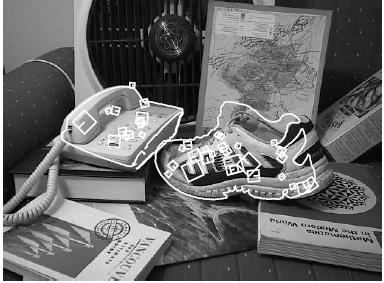
9 Objektsuche Scale Invariant Feature Transformation Eigenschaften Invariant gegenüber Skalierung, Translation, Rotation Robuste Wiedererkennung auch bei Veränderung der Umgebung Wiedererkennung bei Teilverdeckung 9

10 SIFT Funktion Difference of Gaussian (DOG) Pyramide Extremasuche im DOG Bildern Quelle: ; 10
11 Gaußpyramide 14. November 2009 AW1 Vortrag Hosnia Najem Quelle: Hosnia Najem Bachelorarbeit Haw-Hamburg November
12 SIFT Funktion Invarianter markanter Punkt durch 128- dimensionalen Merkmalsvektor Quelle: Hosnia Najem Bachelorarbeit Haw-Hamburg November D Vektor =4 x4 Pixel x 8 Gradientenrichtung 14. November 2009 AW1 Vortrag Hosnia Najem 12
13 SIFT- Korrespondenzen Korrespondenzen markanter Punkte Quelle: Hosnia Najem Bachelorarbeit Haw-Hamburg November

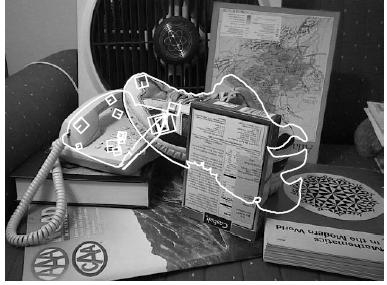
14 SIFT Matching Keypoint Objektmodelle SIFT-Matchings-Keys Quelle: 14
15 Positionsbestimmung in Räumen Kameramodell Abbildung eines Raumpunktes: X (x,y,z) auf den Bildpunkt Xc(x,y) Quelle: November 2009 AW1 Vortrag Hosnia Najem 15
16 Positionsbestimmung in Räumen Kamera Kalibrierung Kamera Abstände Kamera Ausrichtungen Position, Lage Kameraparameter bestimmen Extrinsische Orientierung Intrinsische Orientierung 13 Kameraparameter Quelle: November 2009 AW1 Vortrag Hosnia Najem 16
17 Positionsbestimmung in Räumen Wie bildet eine Kamera Raumpunkte ab? Quelle: 17
18 Fazit SIFT hat Objekt erkannt Kameras liefern 3D Koordinaten im Raum, aber Wo ist der Schuh im Raum? Ziel: Der Schuh liegt neben dem Telefon. Voraussetzung: Alle Objekte im Raum sind bekannt Software: Gibt mir Information welche anderen Objekte im Raum liegen 18
19 Raum Modell City Geography Markup Language (CityGML) Geometrische Modellierung des Raumes 3D Darstellung des Raumes Level Of Detail 0-4 LOD 4 : Darstellung von Innenräumen, Texturen usw. Wo wird es bis jetzt eingesetzt? Als Landkarten zur Navigation 14. November 2009 AW1 Vortrag Hosnia Najem 19


20 CityGML Quelle: November 2009 AW1 Vortrag Hosnia Najem 20
21 CityGML IFC Explorer Quelle: 21
22 Zusammenfassung ZIEL : Der Schuh liegt neben dem Telefon. SIFT-Featur-Keys Gesuchtes Objekt Schuhe Objekte im Raum Telefon, Teddy,usw. Kamera Position und 3D Modell des Objektes im Raum CityGML Raummodell 22
23 Ausblick Anzeigen Objekt auf einem Display Spracherkennung mit Kamera verbinden Das gesuchte Objekt ansagen! Kamera mit den Sensoren verbinden: Putzfrau nach einer Party anfordern 23
24 Literatur DAVID G. LOWE: DAVID G. LOWE: BETTER MATCHING WITH FEWER FEATURES: THE SELECTION OF USEFUL FEATURES IN LARGE DATABASE RECOGNITION PROBLEMS, PANU TURCOT AND DAVID G. LOWE, UNIVERSITY OF BRITISH COLUMBIA VANCOUVER, CANADA PJTURCOT, DAVID G. LOWE: OBJECT RECOGNITION FROM LOCAL SCALE-INVARIANT FEATURES: DAVID G. LOWE: OBJECT RECOGNITION FROM LOCAL SCALE-INVARIANT FEATURES DAVID G. LOWE: DISTINCTIVE IMAGE FEATURES FROM SCALE-INVARIANT KEYPOINTS HOSNIA NAJEM: REALISIERUNG EINER BIBLIOTHEK FÜR DIE SCHNELLE OBJEKTVERFOLGUNG UND OBJEKTERKENNUNG IN BILDSEQUENZEN ;BACHELORARBEIT HAW-HAMBURG NOVEMBER 2009 CHRISTIAN STRAHL : OBJEKTERKENNUNG MITTELS SCALE INVARIANT FEATURE TRANSFORM ; HAW-HAMBURG:MASTER 2008 AW-VORTRAG 24
25 Literatur THORSTEN JOST: NAVIGATION ANHAND NATÜRLICHER LANDMARKEN MIT HILFE DER SCALE INVARIANT FEATURE TRANSFORM ; HAW-HAMBURG:MASTER 2008 ANWENDUG-VORTRAG ALEWTINA SCHUMAN: EIN EINFACH BENUTZBARES MOBILES NAVIGATIONSSYSTEM FÜR FUßGÄNGER (2008) MASTERARBEIT HAW-HAMBURG 2008; ANDREAS MEISEL:VORLESUNG: ANWENDUNGEN 2 HAW-HAMBURG HELMUT-SCHMIDT-UNIVERSITÄT UNIVERSITÄT DER BUNDESWEHR HAMBURG :ALLGEMEINE NACHRICHTENTECHNIK: 25
26 Literatur IFC - VIRTUAL REALITY : CITYGML: GEO-INFORMATIONSSYSTEME: IFCEXPLORER_CITYGML_-_IFC_CONVERTER: KIT UNIVERSITÄT DES LANDES BADEN-WÜRTTEMBERG UND NATIONALES FORSCHUNGSZENTRUM IN DER HELMHOLTZ-GEMEINSCHAFT INSTITUT FÜR ANGEWANDTE INFORMATIK: November 2009 AW1 Vortrag Hosnia Najem 26
27 Vielen Dank für die Aufmerksamkeit! 27
Betrachtung von Verfahren zur Posenbestimmung und Merkmalsexktraktion. Thorsten Jost INF-MA SR Wintersemester 2008/2009 1.
 Betrachtung von Verfahren zur Posenbestimmung und Merkmalsexktraktion Thorsten Jost INF-MA SR Wintersemester 2008/2009 1. Dezember 2008 Agenda Motivation Feature Detection SIFT MOPS SURF SLAM Monte Carlo
Betrachtung von Verfahren zur Posenbestimmung und Merkmalsexktraktion Thorsten Jost INF-MA SR Wintersemester 2008/2009 1. Dezember 2008 Agenda Motivation Feature Detection SIFT MOPS SURF SLAM Monte Carlo
Implementierung und Evaluierung von Video Feature Tracking auf moderner Grafik Hardware
 Implementierung und Evaluierung von Video Feature Tracking auf moderner Diplomarbeit vorgelegt von Sebastian Heymann Betreut von Prof. Dr. Bernd Fröhlich Bauhaus Universität t Dr. Aljoscha Smolic Fraunhofer
Implementierung und Evaluierung von Video Feature Tracking auf moderner Diplomarbeit vorgelegt von Sebastian Heymann Betreut von Prof. Dr. Bernd Fröhlich Bauhaus Universität t Dr. Aljoscha Smolic Fraunhofer
Bildmerkmalssuche. Seminar Computational Photography. Visual Computing Department of Computer Science
 Bildmerkmalssuche Seminar Computational Photography EINFÜHRUNG 2 Einführung Bildmerkmalssuche: sehr wichtiges Thema des künstlichen Sehens Erkennen von Objekten auf dem Bild oder in einer Bildsequenz anhand
Bildmerkmalssuche Seminar Computational Photography EINFÜHRUNG 2 Einführung Bildmerkmalssuche: sehr wichtiges Thema des künstlichen Sehens Erkennen von Objekten auf dem Bild oder in einer Bildsequenz anhand
Scannen ohne Scanner: Bildbasierte 3D Punktwolken Grundlagen, Anwendungen und Erfahrungen
 Scannen ohne Scanner: Bildbasierte 3D Punktwolken Grundlagen, Anwendungen und Erfahrungen Heinz Jürgen Przybilla Gliederung Einleitung Grundlagen Dense Image Matching / Structure from Motion Systeme Anwendungen
Scannen ohne Scanner: Bildbasierte 3D Punktwolken Grundlagen, Anwendungen und Erfahrungen Heinz Jürgen Przybilla Gliederung Einleitung Grundlagen Dense Image Matching / Structure from Motion Systeme Anwendungen
0.0 Kamera-Eigenschaften
 Sony HDR-SR1 MTS (AVCHD) Dateien in AVI-Datei konvertieren Version 1.0 Stand 12.06.2008 0.0 - Kamera-Eigenschaften 1.0 - Filmdaten auf den PC übertragen 1.1 - Kamera mit dem PC verbinden 1.2 - Kamera vom
Sony HDR-SR1 MTS (AVCHD) Dateien in AVI-Datei konvertieren Version 1.0 Stand 12.06.2008 0.0 - Kamera-Eigenschaften 1.0 - Filmdaten auf den PC übertragen 1.1 - Kamera mit dem PC verbinden 1.2 - Kamera vom
Computergrafik 2: Objekt-/Bilderkennung
 Computergrafik 2: Objekt-/Bilderkennung Prof. Dr. Michael Rohs, Dipl.-Inform. Sven Kratz michael.rohs@ifi.lmu.de MHCI Lab, LMU München Folien teilweise von Andreas Butz, sowie von Klaus D. Tönnies (Grundlagen
Computergrafik 2: Objekt-/Bilderkennung Prof. Dr. Michael Rohs, Dipl.-Inform. Sven Kratz michael.rohs@ifi.lmu.de MHCI Lab, LMU München Folien teilweise von Andreas Butz, sowie von Klaus D. Tönnies (Grundlagen
MMI2 Übung 10: Kamera-basierte mobile Interaktion. Prof. Dr. Michael Rohs, Dipl.-Inform. Sven Kratz michael.rohs@ifi.lmu.de MHCI Lab, LMU München
 MMI2 Übung 10: Kamera-basierte mobile Interaktion Prof. Dr., Dipl.-Inform. Sven Kratz michael.rohs@ifi.lmu.de MHCI Lab, LMU München Aktuelles Klausur am 8.2.2012 Anmeldung Fragen zur Klausur jeweils zu
MMI2 Übung 10: Kamera-basierte mobile Interaktion Prof. Dr., Dipl.-Inform. Sven Kratz michael.rohs@ifi.lmu.de MHCI Lab, LMU München Aktuelles Klausur am 8.2.2012 Anmeldung Fragen zur Klausur jeweils zu
Mobile Augmented Reality
 Mobile Augmented Reality Semantische Bauwerksmodelle als Datengrundlage einer Smartphone-basierten Augmented Reality Anwendung RWTH Aachen University Geodätisches Institut Lehrstuhl für Bauinformatik &
Mobile Augmented Reality Semantische Bauwerksmodelle als Datengrundlage einer Smartphone-basierten Augmented Reality Anwendung RWTH Aachen University Geodätisches Institut Lehrstuhl für Bauinformatik &
Computergrafik 2: Objekt-/Bilderkennung
 Computergrafik 2: Objekt-/Bilderkennung Prof. Dr. Michael Rohs, Dipl.-Inform. Sven Kratz michael.rohs@ifi.lmu.de MHCI Lab, LMU München Folien teilweise von Andreas Butz, sowie von Klaus D. Tönnies (Grundlagen
Computergrafik 2: Objekt-/Bilderkennung Prof. Dr. Michael Rohs, Dipl.-Inform. Sven Kratz michael.rohs@ifi.lmu.de MHCI Lab, LMU München Folien teilweise von Andreas Butz, sowie von Klaus D. Tönnies (Grundlagen
Head Tracking durch Bildanalyse auf einem Smartphone
 Gruppenarbeit Head Tracking durch Bildanalyse auf einem Smartphone Andreas Marcaletti Si Sun Betreuer: Samuel Welten Michael Kuhn Prof. Dr. R. Wattenhofer 1 / 17
Gruppenarbeit Head Tracking durch Bildanalyse auf einem Smartphone Andreas Marcaletti Si Sun Betreuer: Samuel Welten Michael Kuhn Prof. Dr. R. Wattenhofer 1 / 17
 3D City Model Berlin Spatial Data Infrastructure Berlin: The 3D City Model ERDF Project Strategic Goal 3D City Model Berlin Strategic Goal Use of 3D City Model for: City and Urban Planning, Political Issues
3D City Model Berlin Spatial Data Infrastructure Berlin: The 3D City Model ERDF Project Strategic Goal 3D City Model Berlin Strategic Goal Use of 3D City Model for: City and Urban Planning, Political Issues
Eckehard Steinbach Fachgebiet Medientechnik. Technische Universität München. EIKON e.v. Jahresversammlung
 Bildbasierte 3D Welten Eckehard Steinbach Fachgebiet Medientechnik Lehrstuhl für Kommunikationsnetze Technische Universität München EIKON e.v. Jahresversammlung 10.02.200902 2009 Traditionell: Geometrische
Bildbasierte 3D Welten Eckehard Steinbach Fachgebiet Medientechnik Lehrstuhl für Kommunikationsnetze Technische Universität München EIKON e.v. Jahresversammlung 10.02.200902 2009 Traditionell: Geometrische
Tracking Technologien für Augmented Reality
 Tracking Technologien für Augmented Reality 1 Inhalt Motivation Tracking Methoden Optisch MarkerlessTracking (kleine Wiederholung) Aktiv und Passive Marker Modellbasiertes Markerless Tracking Sensoren
Tracking Technologien für Augmented Reality 1 Inhalt Motivation Tracking Methoden Optisch MarkerlessTracking (kleine Wiederholung) Aktiv und Passive Marker Modellbasiertes Markerless Tracking Sensoren
Augmented Reality - Grundlagen
 Augmented Reality - Grundlagen Intelligente Mensch-Maschine-Interaktion - IMMI SS 2011 Prof. Didier Stricker Didier.Stricker@dfki.de Die Vorlesung am 07.06 findet im Raum Zuse am DFKI statt 2 Übersicht
Augmented Reality - Grundlagen Intelligente Mensch-Maschine-Interaktion - IMMI SS 2011 Prof. Didier Stricker Didier.Stricker@dfki.de Die Vorlesung am 07.06 findet im Raum Zuse am DFKI statt 2 Übersicht
Ein etwas anderer Morgen für Sal [0] [10]
![Ein etwas anderer Morgen für Sal [0] [10]](/thumbs/30/14321918.jpg "Ein etwas anderer Morgen für Sal [0] [10]") Ein etwas anderer Morgen für Sal [0] [10] Integrationsplattform für HCI Untersuchungen in Smart Environments Sobin Ghose - Masterseminar SS2015 EmotionBike HAW Hamburg Worum geht s? Motivation [1] J.A.R.V.I.S.
Ein etwas anderer Morgen für Sal [0] [10] Integrationsplattform für HCI Untersuchungen in Smart Environments Sobin Ghose - Masterseminar SS2015 EmotionBike HAW Hamburg Worum geht s? Motivation [1] J.A.R.V.I.S.
Ein- und Ausgabegeräte für AR-Systeme
 Ein- und Ausgabegeräte für AR- Hauptseminar: Virtual and Augmented Reality Karin Leichtenstern am Gliederung (1) 1. Einführung Besonderheiten Anforderungen 2. Eingabegeräte in der Augmented Reality Klassische
Ein- und Ausgabegeräte für AR- Hauptseminar: Virtual and Augmented Reality Karin Leichtenstern am Gliederung (1) 1. Einführung Besonderheiten Anforderungen 2. Eingabegeräte in der Augmented Reality Klassische
Computer Vision: 3D-Geometrie. D. Schlesinger () Computer Vision: 3D-Geometrie 1 / 17
 Computer Vision: 3D-Geometrie 1 / 17") Computer Vision: 3D-Geometrie D. Schlesinger () Computer Vision: 3D-Geometrie 1 / 17 Lochkamera Modell C Projektionszentrum, Optische Achse, Bildebene, P Hauptpunkt (optische Achse kreuzt die Bildebene),
Computer Vision: 3D-Geometrie D. Schlesinger () Computer Vision: 3D-Geometrie 1 / 17 Lochkamera Modell C Projektionszentrum, Optische Achse, Bildebene, P Hauptpunkt (optische Achse kreuzt die Bildebene),
Probleme der Navigation von Rehabilitationsroboter: Intelligenter Rollstuhl
 16.04.2013 Advanced Seminar "Computer Engineering" WS2012/2013 Probleme der Navigation von Rehabilitationsroboter: Intelligenter Rollstuhl Sandrine Michele Chouansu Lehrstuhl für Automation; Universität
16.04.2013 Advanced Seminar "Computer Engineering" WS2012/2013 Probleme der Navigation von Rehabilitationsroboter: Intelligenter Rollstuhl Sandrine Michele Chouansu Lehrstuhl für Automation; Universität
Webbasierte Exploration von großen 3D-Stadtmodellen mit dem 3DCityDB Webclient
 Webbasierte Exploration von großen 3D-Stadtmodellen mit dem 3DCityDB Webclient Zhihang Yao, Kanishk Chaturvedi, Thomas H. Kolbe Lehrstuhl für Geoinformatik www.gis.bgu.tum.de 11/14/2015 Webbasierte Exploration
Webbasierte Exploration von großen 3D-Stadtmodellen mit dem 3DCityDB Webclient Zhihang Yao, Kanishk Chaturvedi, Thomas H. Kolbe Lehrstuhl für Geoinformatik www.gis.bgu.tum.de 11/14/2015 Webbasierte Exploration
Objekterkennung mit OpenCV
 Roland Schellhorn Objekterkennung mit OpenCV 103 - Recent Advances in Multimedia Processing Abstract Die Analyse unterschiedlicher Objekterkennungsmethoden der Open Source Library OpenCV wird anhand eines
Roland Schellhorn Objekterkennung mit OpenCV 103 - Recent Advances in Multimedia Processing Abstract Die Analyse unterschiedlicher Objekterkennungsmethoden der Open Source Library OpenCV wird anhand eines
Ausarbeitung - Anwendungen 2
 Hochschule für Angewandte Wissenschaften Hamburg Hamburg University of Applied Sciences Ausarbeitung - Anwendungen 2 Carsten Fries Kameragesteuerter Knickarmroboter zur Lokalisierung von Gegenständen Fakultät
Hochschule für Angewandte Wissenschaften Hamburg Hamburg University of Applied Sciences Ausarbeitung - Anwendungen 2 Carsten Fries Kameragesteuerter Knickarmroboter zur Lokalisierung von Gegenständen Fakultät
AW2-Vortrag. Ambient Telephony. Nicolas Bänisch HAW Hamburg 07.06.2012
 1 AW2-Vortrag Ambient Telephony Nicolas Bänisch HAW Hamburg 07.06.2012 2 Gliederung Einführung Related Work Konferenzen Forschungsgebiete Verwandte Arbeiten Zusammenfassung 3 Einführung 4 Einführung Ambient
1 AW2-Vortrag Ambient Telephony Nicolas Bänisch HAW Hamburg 07.06.2012 2 Gliederung Einführung Related Work Konferenzen Forschungsgebiete Verwandte Arbeiten Zusammenfassung 3 Einführung 4 Einführung Ambient
Video Line Array Highest Resolution CCTV
 Schille Informationssysteme GmbH Video Line Array Highest Resolution CCTV SiDOC20120817-001 Disadvantages of high resolution cameras High costs Low frame rates Failure results in large surveillance gaps
Schille Informationssysteme GmbH Video Line Array Highest Resolution CCTV SiDOC20120817-001 Disadvantages of high resolution cameras High costs Low frame rates Failure results in large surveillance gaps
Computer-Graphik I Transformationen & Viewing
 lausthal Motivation omputer-raphik I Transformationen & Viewing Man möchte die virtuelle 3D Welt auf einem 2D Display darstellen. Zachmann lausthal University, ermany zach@in.tu-clausthal.de. Zachmann
lausthal Motivation omputer-raphik I Transformationen & Viewing Man möchte die virtuelle 3D Welt auf einem 2D Display darstellen. Zachmann lausthal University, ermany zach@in.tu-clausthal.de. Zachmann
Computer Vision I. Nikos Canterakis. Lehrstuhl für Mustererkennung, Universität Freiburg
 Nikos Canterakis Lehrstuhl für Mustererkennung, Universität Freiburg Gliederung 8 Projektive Invarianz und das kanonische Kamerapaar Kanonisches Kamerapaar aus gegebener Fundamentalmatrix Freiheitsgrade
Nikos Canterakis Lehrstuhl für Mustererkennung, Universität Freiburg Gliederung 8 Projektive Invarianz und das kanonische Kamerapaar Kanonisches Kamerapaar aus gegebener Fundamentalmatrix Freiheitsgrade
Validierung von CityGML-Modellen in FME
 Validierung von CityGML-Modellen in FME 22. November 2013, Berlin Christian Dahmen Consultant Spatial ETL/ FME Wasserdicht? Quelle: con terra, Wersehaus 2 Agenda Projekt CityDoctor FME Technologie Validierung
Validierung von CityGML-Modellen in FME 22. November 2013, Berlin Christian Dahmen Consultant Spatial ETL/ FME Wasserdicht? Quelle: con terra, Wersehaus 2 Agenda Projekt CityDoctor FME Technologie Validierung
Automatisierte Objektaufnahme für Bilddatenbanken
 Automatisierte Objektaufnahme für Bilddatenbanken - Vortrag zum Farbworkshop 2008 - Wolfram Hans, Dietrich Paulus {hans, paulus}@uni-koblenz.de Institut für Computervisualistik Universität Koblenz-Landau
Automatisierte Objektaufnahme für Bilddatenbanken - Vortrag zum Farbworkshop 2008 - Wolfram Hans, Dietrich Paulus {hans, paulus}@uni-koblenz.de Institut für Computervisualistik Universität Koblenz-Landau
E-Learning Module für Standards zur Geodatenmodellierung Trainingskurse für mobile Endgeräte
 Wednesday, June 20, 2012 Technische Universität Berlin Institute for Geodesy and Geoinformation Science Methods of GEOINFORMATION E-Learning Module für Standards zur Geodatenmodellierung Trainingskurse
Wednesday, June 20, 2012 Technische Universität Berlin Institute for Geodesy and Geoinformation Science Methods of GEOINFORMATION E-Learning Module für Standards zur Geodatenmodellierung Trainingskurse
Software in der Industriellen Bildverarbeitung
 Software in der Industriellen Bildverarbeitung Technologieentwicklung am Beispiel Pattern Matching Dr. Olaf Munkelt MVTec Software GmbH MVTec Software GmbH Firma konzentriert sich auf Building Vision for
Software in der Industriellen Bildverarbeitung Technologieentwicklung am Beispiel Pattern Matching Dr. Olaf Munkelt MVTec Software GmbH MVTec Software GmbH Firma konzentriert sich auf Building Vision for
Fahrzeuglokalisierung anhand visueller Landmarken und einer digitalen Karte
 Fahrzeuglokalisierung anhand visueller Landmarken und einer digitalen Karte Oliver Pink INSTITUT FÜR MESS- UND REGELUNGSTECHNIK KIT - Universität des Landes Baden-Württemberg und nationales Großforschungszentrum
Fahrzeuglokalisierung anhand visueller Landmarken und einer digitalen Karte Oliver Pink INSTITUT FÜR MESS- UND REGELUNGSTECHNIK KIT - Universität des Landes Baden-Württemberg und nationales Großforschungszentrum
Computer Vision I. Nikos Canterakis. Lehrstuhl für Mustererkennung, Universität Freiburg
 Nikos Canterakis Lehrstuhl für Mustererkennung, Universität Freiburg Gliederung 7 Projektionen und Rückprojektionen Der Punkt Die Gerade Die Quadrik Die Ebene Zusammenhang Kalibriermatrix - Bild des absoluten
Nikos Canterakis Lehrstuhl für Mustererkennung, Universität Freiburg Gliederung 7 Projektionen und Rückprojektionen Der Punkt Die Gerade Die Quadrik Die Ebene Zusammenhang Kalibriermatrix - Bild des absoluten
Mobile! Usability Testing for Innovative Interfaces!
 Mobile! Usability Testing for Innovative Interfaces! Jörn Siedentopp - Anwendungen II - 09.05.2010! Master of Science Informatik! Hochschule für Angewandte Wissenschaften Hamburg (HAW Hamburg)! 1! Inhalt!
Mobile! Usability Testing for Innovative Interfaces! Jörn Siedentopp - Anwendungen II - 09.05.2010! Master of Science Informatik! Hochschule für Angewandte Wissenschaften Hamburg (HAW Hamburg)! 1! Inhalt!
+++ Bitte nutzen Sie die integrierte Audio-Funktion von WebEx (Menü Audio -> Integrated Voice Conference -> Start auswählen), um uns zu hören!!!.
, um uns zu hören!!!.") +++ Bitte nutzen Sie die integrierte Audio-Funktion von WebEx (Menü Audio -> Integrated Voice Conference -> Start auswählen), um uns zu hören!!!. +++ Vorgehensmodell & Beispielanwendung zur Erweiterung
+++ Bitte nutzen Sie die integrierte Audio-Funktion von WebEx (Menü Audio -> Integrated Voice Conference -> Start auswählen), um uns zu hören!!!. +++ Vorgehensmodell & Beispielanwendung zur Erweiterung
Ein Framework für kontextbezogene Anwendungen in der Nexus-Plattform. Matthias Wieland Universität Stuttgart matthias.wieland@iaas.uni-stuttgart.
 Ein Framework für kontextbezogene Anwendungen in der Nexus-Plattform Matthias Wieland Universität Stuttgart matthias.wieland@iaas.uni-stuttgart.de 1 Überblick Motivation Nexus Projekt Vision, Forschungsziele
Ein Framework für kontextbezogene Anwendungen in der Nexus-Plattform Matthias Wieland Universität Stuttgart matthias.wieland@iaas.uni-stuttgart.de 1 Überblick Motivation Nexus Projekt Vision, Forschungsziele
Multitouch Technik & Technologie
 AW1 AW1 Multitouch Technik & Hamburg, 20-06-2007 Agenda Motivation Was ist Touch und Multitouch? Historische Entwicklung Touchsysteme Sensortechniken Heutiger Stand und Ausblick Fazit Agenda Motivation
AW1 AW1 Multitouch Technik & Hamburg, 20-06-2007 Agenda Motivation Was ist Touch und Multitouch? Historische Entwicklung Touchsysteme Sensortechniken Heutiger Stand und Ausblick Fazit Agenda Motivation
Bachelorarbeit. Peter Oltmann. 3D-Lagebestimmung von Objekten für Assistenzroboter. Fakultät Technik und Informatik Studiendepartment Informatik
 Bachelorarbeit Peter Oltmann 3D-Lagebestimmung von Objekten für Assistenzroboter Fakultät Technik und Informatik Studiendepartment Informatik Faculty of Engineering and Computer Science Department of Computer
Bachelorarbeit Peter Oltmann 3D-Lagebestimmung von Objekten für Assistenzroboter Fakultät Technik und Informatik Studiendepartment Informatik Faculty of Engineering and Computer Science Department of Computer
Entwicklung eines Distanzmaßes zwischen Bildern über dem Modell der Fields of Visual Words
 Entwicklung eines Distanzmaßes zwischen Bildern über dem Modell der Fields of Visual Words André Viergutz 1 Inhalt Einführung. Einordnung der Arbeit in die zugrunde liegenden Konzepte Das Modell der Fields
Entwicklung eines Distanzmaßes zwischen Bildern über dem Modell der Fields of Visual Words André Viergutz 1 Inhalt Einführung. Einordnung der Arbeit in die zugrunde liegenden Konzepte Das Modell der Fields
Chancen und Möglichkeiten der Nutzung von Augmented Reality Technologien im Industrie 4.0 Umfeld Vortrag auf dem Karlsruher Entwicklertag 2015
 Karlsruhe Technology Consulting www.karlsruhe-technology.de Chancen und Möglichkeiten der Nutzung von Augmented Reality Technologien im Industrie 4.0 Umfeld Vortrag auf dem Karlsruher Entwicklertag 2015
Karlsruhe Technology Consulting www.karlsruhe-technology.de Chancen und Möglichkeiten der Nutzung von Augmented Reality Technologien im Industrie 4.0 Umfeld Vortrag auf dem Karlsruher Entwicklertag 2015
Software Analyse Tooldemo: JQuery Sommersemester 2011. Jonas Pusch
 Software Analyse Tooldemo: JQuery Sommersemester 2011 Jonas Pusch Gliederung 1. Was ist JQuery? 2. Browsing Code (Motivation for JQuery) 3. Wie funktioniert JQuery? i. JQuery Features ii. TyRuBa (Sprache
Software Analyse Tooldemo: JQuery Sommersemester 2011 Jonas Pusch Gliederung 1. Was ist JQuery? 2. Browsing Code (Motivation for JQuery) 3. Wie funktioniert JQuery? i. JQuery Features ii. TyRuBa (Sprache
Technische Universität
 Technische Universität München Fakultät für Informatik Forschungs- und Lehreinheit Informatik IX Stereo Vision: Epipolargeometrie Proseminar: Grundlagen Bildverarbeitung/Bildverstehen Alexander Sahm Betreuer:
Technische Universität München Fakultät für Informatik Forschungs- und Lehreinheit Informatik IX Stereo Vision: Epipolargeometrie Proseminar: Grundlagen Bildverarbeitung/Bildverstehen Alexander Sahm Betreuer:
iflat: Vision of Computer Supported Cooperative Work in Home Environment
 iflat: Vision of Computer Supported Cooperative Work in Home Environment - - - AW2 - - Master Informatik HAW Hamburg Wintersemester - 03. Dezember 2008 Folie 1 AGENDA Kurzvorstellung iflat Kontext und
iflat: Vision of Computer Supported Cooperative Work in Home Environment - - - AW2 - - Master Informatik HAW Hamburg Wintersemester - 03. Dezember 2008 Folie 1 AGENDA Kurzvorstellung iflat Kontext und
Geodateninfrastruktur Berlin: Das virtuelle 3D Stadtmodell
 3D Stadtmodell Berlin Geodateninfrastruktur Berlin: Das virtuelle 3D Stadtmodell EFRE Projekt Strategische Ziele 3D Stadtmodell Berlin Strategische Ziele Einsatz des 3D Stadtmodells für: Stadt- und Raumplanung,
3D Stadtmodell Berlin Geodateninfrastruktur Berlin: Das virtuelle 3D Stadtmodell EFRE Projekt Strategische Ziele 3D Stadtmodell Berlin Strategische Ziele Einsatz des 3D Stadtmodells für: Stadt- und Raumplanung,
Wearable Computing im Gesundheitswesen
 Wearable Computing im Gesundheitswesen Dipl.-Ing. Dr. techn. Wolfgang Vorraber, Univ.-Prof. Dipl.-Ing. Dr. techn. Siegfried Vössner, Dipl.-Ing. Dietmar Neubacher, Technische Universität Graz, Österreich
Wearable Computing im Gesundheitswesen Dipl.-Ing. Dr. techn. Wolfgang Vorraber, Univ.-Prof. Dipl.-Ing. Dr. techn. Siegfried Vössner, Dipl.-Ing. Dietmar Neubacher, Technische Universität Graz, Österreich
Computer Vision I. Nikos Canterakis. Lehrstuhl für Mustererkennung, Universität Freiburg,
 Nikos Canterakis Lehrstuhl für Mustererkennung, Universität Freiburg, Literatur Richard Hartle and Andrew Zisserman. Multiple View Geometr in computer vision, Cambridge Universit Press, 2 nd Ed., 23. O.D.
Nikos Canterakis Lehrstuhl für Mustererkennung, Universität Freiburg, Literatur Richard Hartle and Andrew Zisserman. Multiple View Geometr in computer vision, Cambridge Universit Press, 2 nd Ed., 23. O.D.
In- und Outdoor Positionierungssysteme
 In- und Outdoor Positionierungssysteme Eine Übersicht hlemelso@rumms.uni-mannheim.de Lehrstuhl für Praktische Informatik IV In- und Outdoor Positionierungssysteme Agenda I. Warum Positionierung? II. III.
In- und Outdoor Positionierungssysteme Eine Übersicht hlemelso@rumms.uni-mannheim.de Lehrstuhl für Praktische Informatik IV In- und Outdoor Positionierungssysteme Agenda I. Warum Positionierung? II. III.
Hauptseminar Autofokus
 Hauptseminar Autofokus Hans Dichtl 30. Januar 2007 Wann ist ein Bild fokussiert? Wann ist ein Bild fokusiert? Welche mathematischen Modelle stehen uns zur Verfügung? Wie wird das elektronisch und mechanisch
Hauptseminar Autofokus Hans Dichtl 30. Januar 2007 Wann ist ein Bild fokussiert? Wann ist ein Bild fokusiert? Welche mathematischen Modelle stehen uns zur Verfügung? Wie wird das elektronisch und mechanisch
Technische Hinweise zum Verfahren
 Technische Hinweise zum Verfahren Mit aspect 3D ist es möglich auf einfache Art farbige 3D-Punktwolken aus digitalen Bildsequenzen zu erstellen. Sie benötigen hierzu lediglich eine digitale Kamera und
Technische Hinweise zum Verfahren Mit aspect 3D ist es möglich auf einfache Art farbige 3D-Punktwolken aus digitalen Bildsequenzen zu erstellen. Sie benötigen hierzu lediglich eine digitale Kamera und
Computer Vision SS 2011. Skript
 Computer Vision SS 211 Skript (Work in Progress) Simon Hawe & Martin Kleinsteuber Skript: Manuel Wolf Inhaltsverzeichnis 1 Einführung 1 1.1 Was ist ein Bild?................................. 1 1.2 Wie
Computer Vision SS 211 Skript (Work in Progress) Simon Hawe & Martin Kleinsteuber Skript: Manuel Wolf Inhaltsverzeichnis 1 Einführung 1 1.1 Was ist ein Bild?................................. 1 1.2 Wie
Kurzinformation zur digitalen. Fotografie. Sönke Ehlert, Fotografenmeister der digicult-verbund eg
 Kurzinformation zur digitalen Fotografie Sönke Ehlert, Fotografenmeister der digicult-verbund eg Ablauf der Aufnahme bis zum Druck Aufnahme des Objektes Motiv wird als tif. gespeichert. In der Druckerei
Kurzinformation zur digitalen Fotografie Sönke Ehlert, Fotografenmeister der digicult-verbund eg Ablauf der Aufnahme bis zum Druck Aufnahme des Objektes Motiv wird als tif. gespeichert. In der Druckerei
Semantische Bildsuche mittels kollaborativer Filterung und visueller Navigation
 Semantische Bildsuche mittels kollaborativer Filterung und visueller Navigation Prof. Dr. Kai Uwe Barthel HTW Berlin / pixolution GmbH Übersicht Probleme der gegenwärtigen Bildsuchsysteme Schlagwortbasierte
Semantische Bildsuche mittels kollaborativer Filterung und visueller Navigation Prof. Dr. Kai Uwe Barthel HTW Berlin / pixolution GmbH Übersicht Probleme der gegenwärtigen Bildsuchsysteme Schlagwortbasierte
Die Stadt in 3D Modellierung und Präsentation
 Die Stadt in 3D Modellierung und Präsentation Ergebnisse studentischer Arbeiten der Jade Hochschule Ingrid Jaquemotte 29.08.13 Die Stadt in 3D Modellierung und Präsentation Inhalt Einführung Erfassung
Die Stadt in 3D Modellierung und Präsentation Ergebnisse studentischer Arbeiten der Jade Hochschule Ingrid Jaquemotte 29.08.13 Die Stadt in 3D Modellierung und Präsentation Inhalt Einführung Erfassung
Videoüberwachung im Wandel. Thomas Adler, Product Manager
 Videoüberwachung im Wandel Thomas Adler, Product Manager 1 Agenda Intelligente Videoüberwachung mit Video-Analyse Aufbau Applikations-Beispiele Analyse direkt in der IP-Kamera Georeferenzierte Video-Managementsysteme
Videoüberwachung im Wandel Thomas Adler, Product Manager 1 Agenda Intelligente Videoüberwachung mit Video-Analyse Aufbau Applikations-Beispiele Analyse direkt in der IP-Kamera Georeferenzierte Video-Managementsysteme
Workshop: Einführung in die 3D-Computergrafik. Julia Tolksdorf Thies Pfeiffer Christian Fröhlich Nikita Mattar
 Workshop: Einführung in die 3D-Computergrafik Julia Tolksdorf Thies Pfeiffer Christian Fröhlich Nikita Mattar 1 Organisatorisches Tagesablauf: Vormittags: Theoretische Grundlagen Nachmittags: Bearbeitung
Workshop: Einführung in die 3D-Computergrafik Julia Tolksdorf Thies Pfeiffer Christian Fröhlich Nikita Mattar 1 Organisatorisches Tagesablauf: Vormittags: Theoretische Grundlagen Nachmittags: Bearbeitung
Physikbasierte Interaktion im Collaborative Workspace
 Physikbasierte Interaktion im Collaborative Workspace Philipp Roßberger Seminarpräsentation 01.12.2006 Masterstudiengang Verteilte Systeme HAW Hamburg Kontext: Collaborative Workspace Große Displays Entkoppelte
Physikbasierte Interaktion im Collaborative Workspace Philipp Roßberger Seminarpräsentation 01.12.2006 Masterstudiengang Verteilte Systeme HAW Hamburg Kontext: Collaborative Workspace Große Displays Entkoppelte
Vorgehen zur Kalibrierung von Kamerabildern
 Vorgehen r Kalibrierng von Kamerabildern Prof. Dr.-Ing. Bernhard Lang, 06.04.2013 3 Kalibrierng von Kamerabildern 3.1 Hintergrnd Eine reale Kamera lässt sich geometrisch drch eine Lochkamera modellieren.
Vorgehen r Kalibrierng von Kamerabildern Prof. Dr.-Ing. Bernhard Lang, 06.04.2013 3 Kalibrierng von Kamerabildern 3.1 Hintergrnd Eine reale Kamera lässt sich geometrisch drch eine Lochkamera modellieren.
Eignung von Tag Clouds zur Exploration und Navigation nutzergenerierter Inhalte
 Eignung von Tag Clouds zur Exploration und Navigation nutzergenerierter Inhalte Bachelorarbeit Institut für Informatik der Technischen Universität München 4. Juli 2011 Agenda 1 Einführung: Tag Cloud 2
Eignung von Tag Clouds zur Exploration und Navigation nutzergenerierter Inhalte Bachelorarbeit Institut für Informatik der Technischen Universität München 4. Juli 2011 Agenda 1 Einführung: Tag Cloud 2
Tablet PC TP7-1000. Deutsch
 Tablet PC TP7-1000 Deutsch Bildschirm: 7 Zoll, G + G kapazitives 5 Point Touchscreen Bedienmethode: Tasten + Touchscreen Gehäuse: hochwertiger Kunststoff Auflösung: 800 x 480 Pixel Chipsatz: Boxchip A13,
Tablet PC TP7-1000 Deutsch Bildschirm: 7 Zoll, G + G kapazitives 5 Point Touchscreen Bedienmethode: Tasten + Touchscreen Gehäuse: hochwertiger Kunststoff Auflösung: 800 x 480 Pixel Chipsatz: Boxchip A13,
3D-Model Reconstruction using Vanishing Points
 3D-Model Reconstruction using Vanishing Points Seminar: Ausgewä hlte Themen zu "Bildverstehen und Mustererkennung" Dozenten: Prof. Dr. Xiaoyi Jiang, Dr. Da-Chuan Cheng, Steffen Wachenfeld, Kai Rothaus
3D-Model Reconstruction using Vanishing Points Seminar: Ausgewä hlte Themen zu "Bildverstehen und Mustererkennung" Dozenten: Prof. Dr. Xiaoyi Jiang, Dr. Da-Chuan Cheng, Steffen Wachenfeld, Kai Rothaus
V1 September 2013. Videokonferenz-Terminale
 V1 September 2013 Videokonferenz-Terminale LiveConf Videokonferenz-Terminale LiveConf bietet neben dem eigentlichen Cloud- Videokonferenzservice ein breites Angebot an VC- Terminalen Von einem einfachen
V1 September 2013 Videokonferenz-Terminale LiveConf Videokonferenz-Terminale LiveConf bietet neben dem eigentlichen Cloud- Videokonferenzservice ein breites Angebot an VC- Terminalen Von einem einfachen
Go-digital Sale & Rent GmbH Seebadstrasse 16 A-5201 Seekirchen Telefon +43 (0) 650-4514371 email: juergen.messner@go-digital.at. Design LCD 17 Zoll
 650-4514371 email: juergen.messner@go-digital.at. Design LCD 17 Zoll") Design LCD 17 Zoll 17 Zoll LCD Panel angebauter Speicherkartenleser (jpeg, mpeg) automatischer Videoanlauf bei Stromzufuhr Filmwechsel über USB Stick und USB Schnittstelle Stromverbrauch ca. 40 W Frontansicht:
Design LCD 17 Zoll 17 Zoll LCD Panel angebauter Speicherkartenleser (jpeg, mpeg) automatischer Videoanlauf bei Stromzufuhr Filmwechsel über USB Stick und USB Schnittstelle Stromverbrauch ca. 40 W Frontansicht:
Biologisch motivierter SLAM Algorithmus
 HAW Hamburg 01. Dezember 2011 Gliederung 1 Einführung 2 RatSLAM 3 Aussicht für Master 2 / 23 Einführung Was ist SLAM SLAM bedeutet: Simultaneous Localization and Mapping Erstellung einer Karte durch mobilen
HAW Hamburg 01. Dezember 2011 Gliederung 1 Einführung 2 RatSLAM 3 Aussicht für Master 2 / 23 Einführung Was ist SLAM SLAM bedeutet: Simultaneous Localization and Mapping Erstellung einer Karte durch mobilen
Seminarbericht. Marcus Rödiger Digitaler Leuchttisch für Printmedien
 Seminarbericht Marcus Rödiger Digitaler Leuchttisch für Printmedien Fakultät Technik und Informatik Department Informatik Faculty of Engineering and Computer Science Department of Computer Science Marcus
Seminarbericht Marcus Rödiger Digitaler Leuchttisch für Printmedien Fakultät Technik und Informatik Department Informatik Faculty of Engineering and Computer Science Department of Computer Science Marcus
Digitale Bildverarbeitung Einheit 12 3D-Rekonstruktion
 Digitale Bildverarbeitung Einheit 12 3D-Rekonstruktion Lehrauftrag SS 2008 Fachbereich M+I der FH-Offenburg Dr. Bernard Haasdonk Albert-Ludwigs-Universität Freiburg Ziele der Einheit Einen Eindruck davon
Digitale Bildverarbeitung Einheit 12 3D-Rekonstruktion Lehrauftrag SS 2008 Fachbereich M+I der FH-Offenburg Dr. Bernard Haasdonk Albert-Ludwigs-Universität Freiburg Ziele der Einheit Einen Eindruck davon
Entwicklung eines 3D-Geoinformationssystems für Gefahrensituationen im In- und Outdoorbereich im Rahmen von WALK
 Entwicklung eines 3D-Geoinformationssystems für Gefahrensituationen im In- und Outdoorbereich im Rahmen von WALK Mariusz Baldowski Hochschule für Angewandte Wissenschaften Hamburg Dept. Informatik mariusz.baldowski@haw-hamburg.de
Entwicklung eines 3D-Geoinformationssystems für Gefahrensituationen im In- und Outdoorbereich im Rahmen von WALK Mariusz Baldowski Hochschule für Angewandte Wissenschaften Hamburg Dept. Informatik mariusz.baldowski@haw-hamburg.de
Brillante Full HD-Videos mit der Flexibilität austauschbarer Objektive
 NEX-VG20EH (NEXVG20EH, NEXVG20EHB.CEE) : Technische Daten : Kameras... Page 1 of 10 Österreich [-] Produkte Shops Support Community My Sony Home > Alle Sony Produkte > Kameras & Camcorder > Camcorder >
NEX-VG20EH (NEXVG20EH, NEXVG20EHB.CEE) : Technische Daten : Kameras... Page 1 of 10 Österreich [-] Produkte Shops Support Community My Sony Home > Alle Sony Produkte > Kameras & Camcorder > Camcorder >
Verhaltensbasierte Robotik I
 Verhaltensbasierte Robotik I Thomas Röfer Verhalten lernen Teaching Homing Rückblick Navigation bei Mensch und Tier Seefahrt Feld-/Beobachterperspektive Referenzsysteme Ameisennavigation Bienennavigation
Verhaltensbasierte Robotik I Thomas Röfer Verhalten lernen Teaching Homing Rückblick Navigation bei Mensch und Tier Seefahrt Feld-/Beobachterperspektive Referenzsysteme Ameisennavigation Bienennavigation
Die Tablet-Ausgabe von promobil
 Die Tablet-Ausgabe von promobil Die Digital-Ausgabe von Europas größtem Reisemobil-Magazin Seite 1 promobil jetzt multimedial auf allen Tablets Seit der CMT 2012 gibt es promobil nun auch als digitale
Die Tablet-Ausgabe von promobil Die Digital-Ausgabe von Europas größtem Reisemobil-Magazin Seite 1 promobil jetzt multimedial auf allen Tablets Seit der CMT 2012 gibt es promobil nun auch als digitale
Condat AG Rolf Fricke F & E Alt-Moabit 91 d 10559 Berlin Tel. (030) 3949-0. Gründung: 1979 Mitarbeiter: ca. 70. www.condat.de.
 3949-0. Gründung: 1979 Mitarbeiter: ca. 70. www.condat.de.") Condat AG Condat AG Rolf Fricke F & E Alt-Moabit 91 d 10559 Berlin Tel. (030) 3949-0 Gründung: 1979 Mitarbeiter: ca. 70 www.condat.de Condat AG 1 Geschäftsfelder Software für innovative Geschäftsprozesse.
Condat AG Condat AG Rolf Fricke F & E Alt-Moabit 91 d 10559 Berlin Tel. (030) 3949-0 Gründung: 1979 Mitarbeiter: ca. 70 www.condat.de Condat AG 1 Geschäftsfelder Software für innovative Geschäftsprozesse.
Intelligente Videotechnologien des
 Intelligente technologien des AIT Austrian Institute t of Technology Safety & Security Department Hoch performante kompremierung und Bildverarbeitung DI Georg Art Safety & Security Department 1 Überblick
Intelligente technologien des AIT Austrian Institute t of Technology Safety & Security Department Hoch performante kompremierung und Bildverarbeitung DI Georg Art Safety & Security Department 1 Überblick
Virtual Dressing Room
 Anwendung 2 MInf2 HAW Hamburg Betreuender Professor: Prof. Dr. Olaf Zukunft [14] Gliederung 1. Einleitung 1.1 Motivation 1.2 Vision 2. Related Work 2.1 Narkissos 2.2 Make Human 2.3 3D aus Silhouetten 2.4
Anwendung 2 MInf2 HAW Hamburg Betreuender Professor: Prof. Dr. Olaf Zukunft [14] Gliederung 1. Einleitung 1.1 Motivation 1.2 Vision 2. Related Work 2.1 Narkissos 2.2 Make Human 2.3 3D aus Silhouetten 2.4
3D TV (Steroskopisches Fernsehen) Trend, Hype oder Flop? Peter Biber, tpc ag switzerland
 Trend, Hype oder Flop? Peter Biber, tpc ag switzerland") 3D TV (Steroskopisches Fernsehen) Trend, Hype oder Flop? Peter Biber, tpc ag switzerland 1 3D / steroskopisches Fernsehen Etwas Geschichte.. Die 3D - Technik bietet dem Zuschauer durch das stereoskopische
3D TV (Steroskopisches Fernsehen) Trend, Hype oder Flop? Peter Biber, tpc ag switzerland 1 3D / steroskopisches Fernsehen Etwas Geschichte.. Die 3D - Technik bietet dem Zuschauer durch das stereoskopische
Integration von 3D-Visualisierungstechniken in 2D-Grafiksystemen
 Mitglied der Helmholtz-Gemeinschaft Inhaltsverzeichnis Integration von 3D-Visualisierungstechniken in 2D-Grafiksystemen Motivation Ergebnisse Ausblick 24. August 2012 Florian Rhiem 24. August 2012 PGI/JCNS
Mitglied der Helmholtz-Gemeinschaft Inhaltsverzeichnis Integration von 3D-Visualisierungstechniken in 2D-Grafiksystemen Motivation Ergebnisse Ausblick 24. August 2012 Florian Rhiem 24. August 2012 PGI/JCNS
blender Wichtige & nützliche Links User Interface Liste mit wichtigen Kurzbefehlen
 blender Wichtige & nützliche Links User Interface Liste mit wichtigen Kurzbefehlen blender 2.72b Tutorial V 1.0 vom 20.11.2014 Gesammelt von Christoph Tamussino 2 blender // Wichtige & nützliche Links
blender Wichtige & nützliche Links User Interface Liste mit wichtigen Kurzbefehlen blender 2.72b Tutorial V 1.0 vom 20.11.2014 Gesammelt von Christoph Tamussino 2 blender // Wichtige & nützliche Links
Größe (mm) 23,5 x 15,7 mm (APS-C-Format) Weißabgleich Presets Tageslicht, Schatten, Bewölkt, Kunstlicht, Fluoreszierendes Licht, Blitz
 23,5 x 15,7 mm (APS-C-Format) Weißabgleich Presets Tageslicht, Schatten, Bewölkt, Kunstlicht, Fluoreszierendes Licht, Blitz") Technische DatenDSLR-A350X Objektivhalterung Sony -Bajonett Mit -Bajonett-Objektiven von Minolta und Konica Minolta kompatibel Objektivkompatibilität Alle -Objektive von Sony Minolta & Konica Minolta /MAXXUM/DYNAX
Technische DatenDSLR-A350X Objektivhalterung Sony -Bajonett Mit -Bajonett-Objektiven von Minolta und Konica Minolta kompatibel Objektivkompatibilität Alle -Objektive von Sony Minolta & Konica Minolta /MAXXUM/DYNAX
3D-Innenraummodellierung mit CityGML
 3D-Innenraummodellierung mit CityGML GIS/SIT 2010 Zürich, 17. Juni 2010 Andreas Donaubauer, Stefan Henrich, Janine Sutter ETH Zürich, Institut für Geodäsie und Photogrammetrie (IGP), Gruppe GIS http://www.gis.ethz.ch
3D-Innenraummodellierung mit CityGML GIS/SIT 2010 Zürich, 17. Juni 2010 Andreas Donaubauer, Stefan Henrich, Janine Sutter ETH Zürich, Institut für Geodäsie und Photogrammetrie (IGP), Gruppe GIS http://www.gis.ethz.ch
Sicheres Cloud-Computing 'made in Karlsruhe'
 Sicheres Cloud-Computing 'made in Karlsruhe' KA-IT-Si - "Cloud, aber sicher! Daniel Eichhorn daniel.eichhorn@wibu.com Sicheres Cloud-Computing 'made in Karlsruhe' Seite 1 Beteiligte Partner Vier Partner
Sicheres Cloud-Computing 'made in Karlsruhe' KA-IT-Si - "Cloud, aber sicher! Daniel Eichhorn daniel.eichhorn@wibu.com Sicheres Cloud-Computing 'made in Karlsruhe' Seite 1 Beteiligte Partner Vier Partner
New Features Oracle Forms 11g Nichts Neu für Forms?
 New Features Oracle Forms 11g Nichts Neu für Forms? Perry Pakull Technology Manager perry.pakull@trivadis.com Zürich, 20.04.2010 Basel Baden Bern Lausanne Zürich Düsseldorf Frankfurt/M. Freiburg i. Br.
New Features Oracle Forms 11g Nichts Neu für Forms? Perry Pakull Technology Manager perry.pakull@trivadis.com Zürich, 20.04.2010 Basel Baden Bern Lausanne Zürich Düsseldorf Frankfurt/M. Freiburg i. Br.
Elektronisches Auge wird wachsamer
 Megapixelkameras erhöhen die Sicherheit Elektronisches Auge wird wachsamer Megapixel-Sensoren steigern die Lichtempfindlichkeit von Überwachungskameras deutlich. Das revolutioniert die Videoüberwachung
Megapixelkameras erhöhen die Sicherheit Elektronisches Auge wird wachsamer Megapixel-Sensoren steigern die Lichtempfindlichkeit von Überwachungskameras deutlich. Das revolutioniert die Videoüberwachung
(ibv) in der klimatischen Erprobung
 in der klimatischen Erprobung") Einsatz der industriellen Bildverarbeitung (ibv) in der klimatischen Erprobung von Anzeigeinstrumenten Jena, 25.10.2011 Robert Bosch GmbH, Dr. Henning Oest 1 Agenda Erprobung Anzeigeinstrumente, Stand
Einsatz der industriellen Bildverarbeitung (ibv) in der klimatischen Erprobung von Anzeigeinstrumenten Jena, 25.10.2011 Robert Bosch GmbH, Dr. Henning Oest 1 Agenda Erprobung Anzeigeinstrumente, Stand
Small Business Solutions. den Fall von Schutzrechtsanmeldungen.
 Bosch Small Business Solutions Small Business Solutions Typical small IP video solution How does that work? Insert SD card Start recording, viewing from any PC Typical small IP video solution All in One
Bosch Small Business Solutions Small Business Solutions Typical small IP video solution How does that work? Insert SD card Start recording, viewing from any PC Typical small IP video solution All in One
Digital Signage als Chance für Kabelnetzbetreiber. Helge Haarig, Spielberg, 16. März 2011
 Digital Signage als Chance für Kabelnetzbetreiber Helge Haarig, Spielberg, 16. März 2011 Digital Signage Über Scala und Scala 5 Vorteile DS und Kabelnetze Warum Digital Signage Scala Produkte Referenzen
Digital Signage als Chance für Kabelnetzbetreiber Helge Haarig, Spielberg, 16. März 2011 Digital Signage Über Scala und Scala 5 Vorteile DS und Kabelnetze Warum Digital Signage Scala Produkte Referenzen
SEMINAR AUTOMATISCHE GESICHTSERKENNUNG
 SEMINAR AUTOMATISCHE GESICHTSERKENNUNG OBERSEMINAR AUTOMATISCHE ANALYSE VON GESICHTSAUSDRÜCKEN Organisation, Überblick, Themen Überblick heutige Veranstaltung 1. Organisatorisches 2. Überblick über beide
SEMINAR AUTOMATISCHE GESICHTSERKENNUNG OBERSEMINAR AUTOMATISCHE ANALYSE VON GESICHTSAUSDRÜCKEN Organisation, Überblick, Themen Überblick heutige Veranstaltung 1. Organisatorisches 2. Überblick über beide
Moderne Videotechnik für Krankenhäuser
 Moderne Videotechnik für Krankenhäuser 1 Fachvereinigung Krankenhaustechnik e.v. Technische Tendenzen Was heißt eigentlich IP : AL LEGIANT Vid eo Matrix BOSCH Unumstritten ist, dass IP CCTV die Zukunft
Moderne Videotechnik für Krankenhäuser 1 Fachvereinigung Krankenhaustechnik e.v. Technische Tendenzen Was heißt eigentlich IP : AL LEGIANT Vid eo Matrix BOSCH Unumstritten ist, dass IP CCTV die Zukunft
Technische Universität München. Fakultät für Informatik
 Technische Universität München Fakultät für Informatik Forschungs- und Lehreinheit Informatik IX Thema: Kameramodelle und Kamerakalibrierung Proseminar: Grundlagen Bildverstehen/Bildgestaltung Michaela
Technische Universität München Fakultät für Informatik Forschungs- und Lehreinheit Informatik IX Thema: Kameramodelle und Kamerakalibrierung Proseminar: Grundlagen Bildverstehen/Bildgestaltung Michaela
Optische Systeme und Computer Vision. Heinz-Wilhelm Hübers, Ralf Reulke
 Optische Systeme und Computer Vision Heinz-Wilhelm Hübers, Ralf Reulke Deutsches Zentrum für Luft- und Raumfahrt e.v. (DLR) Institute of Optical Sensor Systems Humboldt-Universität zu Berlin, Institut
Optische Systeme und Computer Vision Heinz-Wilhelm Hübers, Ralf Reulke Deutsches Zentrum für Luft- und Raumfahrt e.v. (DLR) Institute of Optical Sensor Systems Humboldt-Universität zu Berlin, Institut
Telematik trifft Geomatik
 B der Welt in 3D Die Vermessung Telematik trifft Geomatik Bild: Riegl Prof. Dr. Andreas Nüchter Was ist Telematik? Die Telematik integriert interdisziplinär Methoden der Telekommunikation, der Automatisierungs-technik
B der Welt in 3D Die Vermessung Telematik trifft Geomatik Bild: Riegl Prof. Dr. Andreas Nüchter Was ist Telematik? Die Telematik integriert interdisziplinär Methoden der Telekommunikation, der Automatisierungs-technik
Technische DetailsNEX-5RK
 Technische DetailsNEX-5RK Bitte beachten Sie, dass unser Zubehör modellabhängig ist und die Spezifikationen möglicherweise abhängig vom jeweiligen Land sind. Objektivhalterung A-Objektiv von Sony Sony
Technische DetailsNEX-5RK Bitte beachten Sie, dass unser Zubehör modellabhängig ist und die Spezifikationen möglicherweise abhängig vom jeweiligen Land sind. Objektivhalterung A-Objektiv von Sony Sony
Digitale Bildverarbeitung
 Digitale Bildverarbeitung Dr. Stefan Gehrig Dipl.-Physiker, Dipl.-Ing. (BA) Duale Hochschule Baden-Württemberg - Stuttgart Sommersemester 2015 S. Gehrig - Digitale Bildverarbeitung 1 S. Gehrig - Digitale
Digitale Bildverarbeitung Dr. Stefan Gehrig Dipl.-Physiker, Dipl.-Ing. (BA) Duale Hochschule Baden-Württemberg - Stuttgart Sommersemester 2015 S. Gehrig - Digitale Bildverarbeitung 1 S. Gehrig - Digitale
Seminar: Software Engineering verteilter Systeme
 Seminar: Software Engineering verteilter Systeme Hauptseminar im WS 2010/2011 Programmierung verteilter Systeme Institut für Informatik Universität Augsburg 86135 Augsburg Tel.: +49 821 598-2118 Fax: +49
Seminar: Software Engineering verteilter Systeme Hauptseminar im WS 2010/2011 Programmierung verteilter Systeme Institut für Informatik Universität Augsburg 86135 Augsburg Tel.: +49 821 598-2118 Fax: +49
Ein- und Ausgabegeräte für VR-Systeme
 Ein- und Ausgabegeräte für VR-Systeme Referat von Alexander De Luca Hauptseminar Virtual and Augmented Reality Alexander De Luca 1/27 Gliederung 1. Einleitung 2. Eingabegeräte 2.1. Datenhandschuh 2.2.
Ein- und Ausgabegeräte für VR-Systeme Referat von Alexander De Luca Hauptseminar Virtual and Augmented Reality Alexander De Luca 1/27 Gliederung 1. Einleitung 2. Eingabegeräte 2.1. Datenhandschuh 2.2.
Mainsaver Anwendung auf mobilen Geräten. Steve Unger
 Mainsaver Anwendung auf mobilen Geräten Steve Unger Agenda Agenda -Warum mobil arbeiten -Die Mobile Welt -Web Apps -MobileMainsaver 3.0 - Ausblick Warum mobil arbeiten Nutzen Globale Verfügbarkeit von
Mainsaver Anwendung auf mobilen Geräten Steve Unger Agenda Agenda -Warum mobil arbeiten -Die Mobile Welt -Web Apps -MobileMainsaver 3.0 - Ausblick Warum mobil arbeiten Nutzen Globale Verfügbarkeit von
Migration von SDTV nach HDTV Wie fängt man an?
 Migration von SDTV nach HDTV Wie fängt man an? Agenda Warum wurde Eureka 95 kein Erfolg Stand HDTV in Europa Die verschiedenen HD Formate HDTV Status HDTV Implementierung Verfügbarkeit von HD-fähiger Gerätetechnik
Migration von SDTV nach HDTV Wie fängt man an? Agenda Warum wurde Eureka 95 kein Erfolg Stand HDTV in Europa Die verschiedenen HD Formate HDTV Status HDTV Implementierung Verfügbarkeit von HD-fähiger Gerätetechnik
Jens Kupferschmidt Universitätsrechenzentrum
 Einordnung der Metadaten im MyCoRe Projekt Connection to other databases Data presentations MyCoResearch over instances Classifications Metadate and search Derivate User and access rights GUI Workflow
Einordnung der Metadaten im MyCoRe Projekt Connection to other databases Data presentations MyCoResearch over instances Classifications Metadate and search Derivate User and access rights GUI Workflow
Verarbeitung und Austausch von 3D-Daten mit Spatial ETL-Technologie
 Verarbeitung und Austausch von 3D-Daten mit Spatial ETL-Technologie Christian Dahmen, con terra GmbH 09. November 2011, Bonn con terra GmbH Spin-off der Universität Münster, Institut für Geoinformatik
Verarbeitung und Austausch von 3D-Daten mit Spatial ETL-Technologie Christian Dahmen, con terra GmbH 09. November 2011, Bonn con terra GmbH Spin-off der Universität Münster, Institut für Geoinformatik
SiUWD (Siemens Underwater Detection)
") SiUWD (Siemens Underwater Detection) Ertrinkende retten, bevor es zu spät ist Seite 1 5./6.November 2008 Edi Lehmann Agenda Vorstellung Einführung in die Videotechnik Videosensorik, heutiger Stand Anwendungsbereiche
SiUWD (Siemens Underwater Detection) Ertrinkende retten, bevor es zu spät ist Seite 1 5./6.November 2008 Edi Lehmann Agenda Vorstellung Einführung in die Videotechnik Videosensorik, heutiger Stand Anwendungsbereiche
Gestenerkennung auf mobilen Geräten: Aktueller Stand und. Linda Pfeiffer, Raphael Zender, Ulrike Lucke
 Gestenerkennung auf mobilen Geräten: Aktueller Stand und Potential ti für das Lernen Linda Pfeiffer, Raphael Zender, Ulrike Lucke Motivation i Größe Leistung Sensorik IEEE Spectrum 2007 2011 UNIVERSITÄT
Gestenerkennung auf mobilen Geräten: Aktueller Stand und Potential ti für das Lernen Linda Pfeiffer, Raphael Zender, Ulrike Lucke Motivation i Größe Leistung Sensorik IEEE Spectrum 2007 2011 UNIVERSITÄT
Partielle Verschlüsselung von JPEG2000 Fingerprints
 Partielle Verschlüsselung von JPEG2000 Fingerprints By the pricking of my thumbs, something wicked this way comes. M. Draschl, S. Ramp, M. Perfler Inhalt Motivation und Ziele Jpeg2000 Bildformat NIST Fingerprint
Partielle Verschlüsselung von JPEG2000 Fingerprints By the pricking of my thumbs, something wicked this way comes. M. Draschl, S. Ramp, M. Perfler Inhalt Motivation und Ziele Jpeg2000 Bildformat NIST Fingerprint
Industrielle Bildverarbeitung mit OpenCV
 Industrielle Bildverarbeitung mit OpenCV Zhang,Duoyi 6.7.2 Gliederung. Einführung für OpenCV 2. Die Struktur von OpenCV Überblick Funktionsumfang in Ausschnitten mit Beispielen 3. Industrielles Anwendungsbeispiel
Industrielle Bildverarbeitung mit OpenCV Zhang,Duoyi 6.7.2 Gliederung. Einführung für OpenCV 2. Die Struktur von OpenCV Überblick Funktionsumfang in Ausschnitten mit Beispielen 3. Industrielles Anwendungsbeispiel
VRLab Interaktion in virtueller Realität
 VRLab Interaktion in virtueller Realität Tobias Eger, Simeon Eichel, Christoph Kluck, Pascal Liedtke, Bastian Rackow Hochschule Reutlingen Medien- und Kommunikationsinformatik Master Tobias_Manuel.Eger@student.reutlingen-university.de
VRLab Interaktion in virtueller Realität Tobias Eger, Simeon Eichel, Christoph Kluck, Pascal Liedtke, Bastian Rackow Hochschule Reutlingen Medien- und Kommunikationsinformatik Master Tobias_Manuel.Eger@student.reutlingen-university.de
Marco Zuber, Senior Designer
 www.namics.com Ihre 3D-Filiale in Google Ea arth Mapping-Fachtagung, 14. Juni 20 07 Marco Zuber, Senior Designer Bern, Frankfurt, Hamburg, München, St. Gallen, Zug, Zürich 2 www.namics.com Agenda» Google
www.namics.com Ihre 3D-Filiale in Google Ea arth Mapping-Fachtagung, 14. Juni 20 07 Marco Zuber, Senior Designer Bern, Frankfurt, Hamburg, München, St. Gallen, Zug, Zürich 2 www.namics.com Agenda» Google