Qualität der ALS50 Laserscanner Daten Befliegung Vaihingen/Enz
|
|
|
- Willi Hausler
- vor 6 Jahren
- Abrufe
Transkript
1 Qualität der ALS50 Laserscanner Daten Befliegung Vaihingen/Enz Camillo Ressl, Matthias Ockermüller, Helmut Kager Institut für Photogrammetrie und Fernerkundung (I.P.F.), Technische Universität Wien Evaluierung digitaler photogrammetrischer Luftbildkamerasysteme, DGPF-Projekttreffen an Universität Stuttgart ( )

 - misst: Verdrehung der Plattform Synchronisation mittels GNSS-Signal Figure: Optech Streifenweise")
2 Airborne Laser Scanner System Airborne laser scanning erfolgt mit einem multi sensor system (MSS) mit den System-Komponenten: Laserscanner - Entfernungsmessung mittels LiDAR - Richtungsmessung (verschiedene Ablenkund Messprinzipien) GPS-Empfänger (allgemein: GNSS) - misst: Position der Plattform IMU (Intertial Measurement Unit) - misst: Verdrehung der Plattform Synchronisation mittels GNSS-Signal Figure: Optech Streifenweise Befliegung: 2
 Mounting rotation bias ( misalignment ) LiDaR Abb.")
3 Mathematisches Modell (direkte Georeferenzierung) GNSS IMU, Bodenpunkt (im übergeordneten System) GNSS-Antenne: Phasenzentrum Rotation vom sensor body frame ins globale System Entfernung und Ablenkwinkel des Laserstrahls Mounting offset vector ( lever arm ) Mounting rotation bias ( misalignment ) LiDaR Abb. nach Cramer 2001 Mounting Kalibrierung ist häuft nicht hinreichend genau bekannt Fehler in X 3



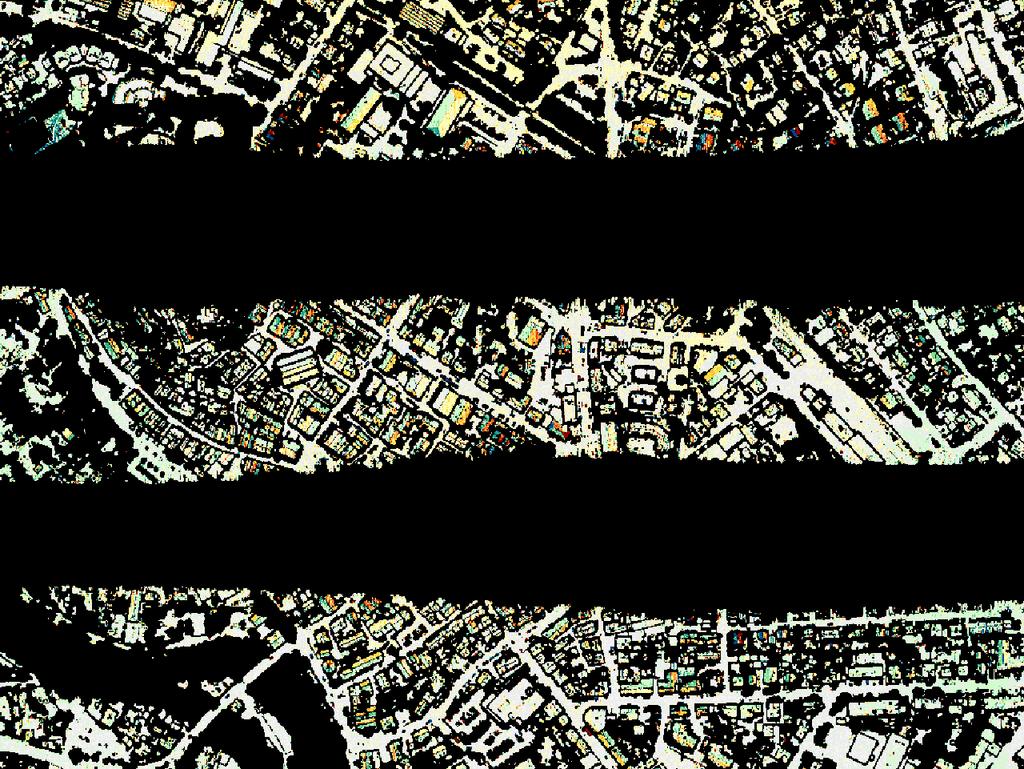
4 Geometrische Qualität der ALS-Daten 2 Streifen Überlappung hervorgehoben Farbcodierte Streifendifferenz [m] LIDAR WORKSHOP 7-9 Nov. 2006, 4


5 Geometrische Qualität der ALS-Daten Farbkodierte Differenz der Höhen von zwei überlappenden Streifen: [m] Effekt der Streifendifferenz an Gebäuden: hauptsächlich Lagefehler aufgrund falscher Georeferenzierung Fehlerursache meist Mounting- Kalibrierung 5
, R IMU (t) muss bekannt sein.")
6 Verbesserung der Georeferenzierung durch ALS-Streifenausgleichung Verschiebung und Verdrehung der Streifen, sowie Korrektur der Mounting-Parametern ( R M, m) und (interner) Laser-Parameter i, so dass Abweichung an korrespondierenden Ebenen im Überlappungsbereich der Streifen minimiert werden. Voraussetzung: GNSS-INS-Trajektorie X GNSS (t), R IMU (t) muss bekannt sein. Verbesserung ohne GNSS-INS-Traj. auch möglich, jedoch vom Ansatz her unterlegen. H. Kager: "Discrepancies Between Overlapping Laser Scanning Strips-Simultaneous Fitting of Aerial Laser Scanner Strips"; ISPRS XXth Congress, Istanbul;






7 Verbesserung der absoluten Orientierung Definition von Passebenen über 4 terrestrisch eingemessene Passpunkte Verschiedene Dachexpositionen sind notwendig. Bei ALS-Vaihingen: photogrammetrisch bestimmte Punkte auf Dächern (aus DMC-Block, 8cm). 7

8 ALS-Vaihingen: Verteilung der Pass- u. Verknüpfungsdächer 1110 Verknüpfungsebenen x 49 Passebenen 8



9 Korrekturen an den originalen Punkten durch die Streifenausgleichung # mean RMS max [m] 9446 x: y: z:

10 Profilansicht: Original-Zustand 10
11 Profilansicht: Zustand nach der Streifenausgleichung 11
12 Streifendifferenzen ALS-Block: 12


13 Streifendifferenzen ALS-Block: Überlappungsbereich hervorgehoben 13

14 Streifendifferenzen ALS-Block: Streifendifferenzen 14

15 Streifendifferenzen: PRE Unmaskierte Streifendifferenz: mit Vegetation [m] Maskierte Streifendifferenz: ohne Vegetation 15
16 Streifendifferenzen: PRE [m] 16
17 Streifendifferenzen: POST [m] 17
18 Streifendifferenzen: PRE Streifendif

19 Streifendifferenzen: POST Streifendif
20 Streifendifferenzen: PRE [m] 20

21 Streifendifferenzen: POST [m] 21
22 Streifendifferenzen: PRE [m] 22

23 Streifendifferenzen: POST [m] 23
24 Gesamtstatistik über alle maskierten Streifendifferenzen (6.6 Mill. Werte) originale Georeferenzierung verbesserte Georeferenzierung nach der Streifenausgleichung [m] 24
25 Zusammenfassung Auswirkung der Streifenausgleichung auf die Daten: Verschiebung in Flugrichtung: 13cm im quadr.mittel, max. 44cm Verbesserung der relativen Orientierung der ALS-Streifen: RMS der Streifendifferenzen von 6.6cm 4.7cm Absolute Orientierung: Passebenen aus DMC-8cm-Block 25
Flugzeuggetragenes (Airborne) Laserscanning. HS BO Lab. für Photogrammetrie: Airborne Laserscanning 1
 Laserscanning. HS BO Lab. für Photogrammetrie: Airborne Laserscanning 1") Flugzeuggetragenes (Airborne) Laserscanning HS BO Lab. für Photogrammetrie: Airborne Laserscanning 1 Airborne Laser Scanning Das Airborne Laser Scanning System erlaubt die berührungslose Erfassung der
Flugzeuggetragenes (Airborne) Laserscanning HS BO Lab. für Photogrammetrie: Airborne Laserscanning 1 Airborne Laser Scanning Das Airborne Laser Scanning System erlaubt die berührungslose Erfassung der
Erstellung eines grenzüberschreitenden digitalen Geländemodells im Nationalpark Neusiedler See- Seewinkel/Fertö-Hanság aus Laserscanner-Daten
 Erstellung eines grenzüberschreitenden digitalen Geländemodells im Nationalpark Neusiedler See- Seewinkel/Fertö-Hanság aus Laserscanner-Daten Maria ATTWENGER und Andreas CHLAUPEK Zusammenfassung Im transnationalen
Erstellung eines grenzüberschreitenden digitalen Geländemodells im Nationalpark Neusiedler See- Seewinkel/Fertö-Hanság aus Laserscanner-Daten Maria ATTWENGER und Andreas CHLAUPEK Zusammenfassung Im transnationalen
DGPF Projekt: Evaluierung digitaler photogrammetrischer Luftbildkamerasysteme - Themenschwerpunkt Höhenmodelle
 DGPF Projekt: Evaluierung digitaler photogrammetrischer Luftbildkamerasysteme - Themenschwerpunkt Höhenmodelle NORBERT HAALA 1, HEIDI HASTEDT 2, CAMILLO RESSL 3, KIRSTEN WOLF 4, Zusammenfassung: Ein zentraler
DGPF Projekt: Evaluierung digitaler photogrammetrischer Luftbildkamerasysteme - Themenschwerpunkt Höhenmodelle NORBERT HAALA 1, HEIDI HASTEDT 2, CAMILLO RESSL 3, KIRSTEN WOLF 4, Zusammenfassung: Ein zentraler
DGPF Projekt: Evaluierung digitaler photogrammetrischer Luftbildkamerasysteme - Themenschwerpunkt Höhenmodelle
 DGPF Projekt: Evaluierung digitaler photogrammetrischer Luftbildkamerasysteme - Themenschwerpunkt Höhenmodelle NORBERT HAALA 1, HEIDI HASTEDT 2, CAMILLO RESSL 3, KIRSTEN WOLF 4, Zusammenfassung: Ein zentraler
DGPF Projekt: Evaluierung digitaler photogrammetrischer Luftbildkamerasysteme - Themenschwerpunkt Höhenmodelle NORBERT HAALA 1, HEIDI HASTEDT 2, CAMILLO RESSL 3, KIRSTEN WOLF 4, Zusammenfassung: Ein zentraler
Datenqualität, Homogenisierung und Forstwirtschaft - Laserscanning in Österreich
 Datenqualität, Homogenisierung und Forstwirtschaft - Laserscanning in Österreich Prof. Norbert Pfeifer & Dr. Markus Hollaus Norbert.pfeifer@geo.tuwien.ac.at Markus.hollaus@geo.tuwien.ac.at Forschungsgruppe
Datenqualität, Homogenisierung und Forstwirtschaft - Laserscanning in Österreich Prof. Norbert Pfeifer & Dr. Markus Hollaus Norbert.pfeifer@geo.tuwien.ac.at Markus.hollaus@geo.tuwien.ac.at Forschungsgruppe
Vorstellung der Bachelorthemen SS 2012
 Vorstellung der Bachelorthemen SS 2012 Photogrammetrie Institut für Photogrammetrie und Fernerkundung (I.P.F.), Technische Universität Wien www.ipf.tuwien.ac.at Ablauf Ziele / Ablauf Konkrete Themenvorschläge
Vorstellung der Bachelorthemen SS 2012 Photogrammetrie Institut für Photogrammetrie und Fernerkundung (I.P.F.), Technische Universität Wien www.ipf.tuwien.ac.at Ablauf Ziele / Ablauf Konkrete Themenvorschläge
15 Jahre Erfahrung mit Laserscanning in der Praxis
 15 Jahre Erfahrung mit Laserscanning in der Praxis TopScan Gesellschaft zur Erfassung topographischer Information mbh Dr. Joachim Lindenberger Düsterbergstr. 5 48432 Rheine Germany info@topscan.de www.topscan.de
15 Jahre Erfahrung mit Laserscanning in der Praxis TopScan Gesellschaft zur Erfassung topographischer Information mbh Dr. Joachim Lindenberger Düsterbergstr. 5 48432 Rheine Germany info@topscan.de www.topscan.de
Inhalte. Genauigkeitsaspekte der Luftbildmessung Anwendungen und Produkte der Stereoauswertung Einzelbildauswertung
 Inhalte Genauigkeitsaspekte der Luftbildmessung Anwendungen und Produkte der Stereoauswertung Einzelbildauswertung Digitales Orthophoto Flugzeuggetragenes (Airborne) Laserscanning HS BO Lab. für Photogrammetrie:
Inhalte Genauigkeitsaspekte der Luftbildmessung Anwendungen und Produkte der Stereoauswertung Einzelbildauswertung Digitales Orthophoto Flugzeuggetragenes (Airborne) Laserscanning HS BO Lab. für Photogrammetrie:
Landesweite Laserscanbefliegung Tirol
 Landesweite Laserscanbefliegung Tirol 2006-2010 Zwischen 2006 und 2010 wurde die gesamte Landesfläche von Tirol mit einem luftgestützten Laserscanner (LIDAR, Airborne Laserscanning) beflogen. Ergebnis
Landesweite Laserscanbefliegung Tirol 2006-2010 Zwischen 2006 und 2010 wurde die gesamte Landesfläche von Tirol mit einem luftgestützten Laserscanner (LIDAR, Airborne Laserscanning) beflogen. Ergebnis
Inhalte. Methoden und Verfahren zur automatisierten Auswertung Bildtriangulation
 Inhalte Methoden und Verfahren zur automatisierten Auswertung Bildtriangulation Grundlagen Blockausgleichung mit unabhängigen Modellen Bündelblockausgleichung HS BO Lab. für Photogrammetrie: Bildtriangulation
Inhalte Methoden und Verfahren zur automatisierten Auswertung Bildtriangulation Grundlagen Blockausgleichung mit unabhängigen Modellen Bündelblockausgleichung HS BO Lab. für Photogrammetrie: Bildtriangulation
Bildflug - Navigation - HS BO Lab. für Photogrammetrie: Navigation 1
 Bildflug - Navigation - HS BO Lab. für Photogrammetrie: Navigation 1 Zielsetzung Direkte Messung der Position und Orientierung des airborne Sensors Notwendige Sensorik: GPS, IMU Zeitstempel: Position/
Bildflug - Navigation - HS BO Lab. für Photogrammetrie: Navigation 1 Zielsetzung Direkte Messung der Position und Orientierung des airborne Sensors Notwendige Sensorik: GPS, IMU Zeitstempel: Position/
Geometrische Genauigkeitsstudie im Rahmen des DGPF- Projekts zur Evaluierung digitaler Kamerasysteme
 Geometrische Genauigkeitsstudie im Rahmen des DGPF- Projekts zur Evaluierung digitaler Kamerasysteme RICHARD LADSTÄDTER 1 & VIKTOR KAUFMANN 2 Zusammenfassung: Das Institut für Fernerkundung und Photogrammetrie
Geometrische Genauigkeitsstudie im Rahmen des DGPF- Projekts zur Evaluierung digitaler Kamerasysteme RICHARD LADSTÄDTER 1 & VIKTOR KAUFMANN 2 Zusammenfassung: Das Institut für Fernerkundung und Photogrammetrie
GNSS/IMU Integration für die präzise Bestimmung einer Flugtrajektorie
 GNSS/IMU Integration für die präzise Bestimmung einer Flugtrajektorie Fabian Hinterberger Institut für Geodäsie und Geophysik, Tu Wien 18. Nov. 2011 1 Motivation Motivation Gegenüberstellung Eigenschaften
GNSS/IMU Integration für die präzise Bestimmung einer Flugtrajektorie Fabian Hinterberger Institut für Geodäsie und Geophysik, Tu Wien 18. Nov. 2011 1 Motivation Motivation Gegenüberstellung Eigenschaften
Prinzip. Grundkonzept Zeilenkamera
 Zeilenkameras Prinzip Grundkonzept Zeilenkamera Prinzip Sensor einzelne CCD-Zeile, orthogonal zur Flugrichtung angeordnet; oft auch pushbroom scanner Aufnahme System muss so konfiguriert sein, dass unmittelbar
Zeilenkameras Prinzip Grundkonzept Zeilenkamera Prinzip Sensor einzelne CCD-Zeile, orthogonal zur Flugrichtung angeordnet; oft auch pushbroom scanner Aufnahme System muss so konfiguriert sein, dass unmittelbar
Aufnahmen flugzeuggetragener Laserscanner als Grundlage zur Erfassung von Straßen und Wegen in bewaldeten Gebieten
 Aufnahmen flugzeuggetragener Laserscanner als Grundlage zur Erfassung von Straßen und Wegen in bewaldeten Gebieten Maria Attwenger, Karl Kraus Institut für Photogrammetrie und Fernerkundung, Technische
Aufnahmen flugzeuggetragener Laserscanner als Grundlage zur Erfassung von Straßen und Wegen in bewaldeten Gebieten Maria Attwenger, Karl Kraus Institut für Photogrammetrie und Fernerkundung, Technische
Kalibrierung von Oblique- und UAV Kameras
 Kalibrierung von Oblique- und UAV Kameras ERWIN J. KRUCK 1 & BALÁZS MÉLYKUTI 2 Oblique Kalibrierungen haben wegen der nicht vertikalen Blickwinkel andere geometrische Voraussetzungen als Standard-Befliegungen.
Kalibrierung von Oblique- und UAV Kameras ERWIN J. KRUCK 1 & BALÁZS MÉLYKUTI 2 Oblique Kalibrierungen haben wegen der nicht vertikalen Blickwinkel andere geometrische Voraussetzungen als Standard-Befliegungen.
Mobiles Laserscanning für 3D-Stadtmodelle
 Workshop 3D-Stadtmodelle Mobiles Laserscanning für 3D-Stadtmodelle 8. und 9. November 2010 im Universitätsclub Bonn TopScan Gesellschaft zur Erfassung topographischer Information mbh Christian Wever Düsterbergstr.
Workshop 3D-Stadtmodelle Mobiles Laserscanning für 3D-Stadtmodelle 8. und 9. November 2010 im Universitätsclub Bonn TopScan Gesellschaft zur Erfassung topographischer Information mbh Christian Wever Düsterbergstr.
Qualitativ: Hier geht es um die Inhalte wie z.b. die Landnutzung Quantitativ: Hierbei geht es um das Messen von Koordinaten
 Grundlagen der Photogrammetrie Die Photogrammetrie ist ein Verfahren zur Vermessung von Objekten nach Lage und Form. Dabei werden die Messungen nicht direkt am Objekt, sondern indirekt auf Bildern des
Grundlagen der Photogrammetrie Die Photogrammetrie ist ein Verfahren zur Vermessung von Objekten nach Lage und Form. Dabei werden die Messungen nicht direkt am Objekt, sondern indirekt auf Bildern des
Details zur Geometrie digitaler Luftbildkameras eingesetzt im DGPF-Projekt Kameraevaluierung
 Details zur Geometrie digitaler Luftbildkameras eingesetzt im DGPF-Projekt Kameraevaluierung Karsten Jacobsen Leibniz Universität Hannover jacobsen@ipi.uni-hannover.de Ziel und Kameras Untersuchung der
Details zur Geometrie digitaler Luftbildkameras eingesetzt im DGPF-Projekt Kameraevaluierung Karsten Jacobsen Leibniz Universität Hannover jacobsen@ipi.uni-hannover.de Ziel und Kameras Untersuchung der
NEW technologies for a better mountain FORest timber mobilization
 NEW technologies for a better mountain FORest timber mobilization UAV in der Forstwirtschaft Methoden und Grenzen Bernadette Sotier BFW - Institut für Naturgefahren Bernadette.Sotier@uibk.ac.at Innsbruck
NEW technologies for a better mountain FORest timber mobilization UAV in der Forstwirtschaft Methoden und Grenzen Bernadette Sotier BFW - Institut für Naturgefahren Bernadette.Sotier@uibk.ac.at Innsbruck
RPAS im operationellen Einsatz beim LGL Baden-Württemberg 3D-Dokumentation von Hangrutschungen
 1 Institut für Photogrammetrie RPAS im operationellen Einsatz beim LGL Baden-Württemberg 3D-Dokumentation von Hangrutschungen Michael Cramer LGL Forum Gelsenkirchen, 4.-5. Juni 2014 Geportal Baden-Württemberg
1 Institut für Photogrammetrie RPAS im operationellen Einsatz beim LGL Baden-Württemberg 3D-Dokumentation von Hangrutschungen Michael Cramer LGL Forum Gelsenkirchen, 4.-5. Juni 2014 Geportal Baden-Württemberg
Evaluierung der UltraCamX
 Evaluierung der UltraCamX Magdalena Linkiewicz Michael Breuer Beuth Hochschule für Technik Berlin 1 Gliederung Einleitung Problemstellung Untersuchungsmethode Ergebnisse Zusammenfassung Dank 2 Einleitung
Evaluierung der UltraCamX Magdalena Linkiewicz Michael Breuer Beuth Hochschule für Technik Berlin 1 Gliederung Einleitung Problemstellung Untersuchungsmethode Ergebnisse Zusammenfassung Dank 2 Einleitung
ifp Kalibrierung und Zertifizierung zur Bewertung digitaler Luftbildkameras Institut für Photogrammetrie Michael Cramer
 Institut für Photogrammetrie ifp Kalibrierung und Zertifizierung zur Bewertung digitaler Luftbildkameras Michael Cramer DGPF-Jahrestagung Jena Kameraevaluierung III 26. März 2009 Warum dieser Vortrag?
Institut für Photogrammetrie ifp Kalibrierung und Zertifizierung zur Bewertung digitaler Luftbildkameras Michael Cramer DGPF-Jahrestagung Jena Kameraevaluierung III 26. März 2009 Warum dieser Vortrag?
Methoden und Verfahren zur automatisierten Auswertung
 Inhalte Bildtriangulation Grundlagen Blockausgleichung mit unabhängigen Modellen Bündelblockausgleichung Methoden und Verfahren zur automatisierten Auswertung H.-J. Przybilla Bündelblockausgleichung 1
Inhalte Bildtriangulation Grundlagen Blockausgleichung mit unabhängigen Modellen Bündelblockausgleichung Methoden und Verfahren zur automatisierten Auswertung H.-J. Przybilla Bündelblockausgleichung 1
GPS/IMU-unterstützte Georeferenzierung der Daten flugzeuggetragener multispektraler Scanner
 GPS/IMU-unterstützte Georeferenzierung der Daten flugzeuggetragener multispektraler Scanner CHRISTINE RIES, HELMUT KAGER, PHILIPP STADLER 1 Zusammenfassung: In diesem Beitrag wird der prinzipielle Ablauf
GPS/IMU-unterstützte Georeferenzierung der Daten flugzeuggetragener multispektraler Scanner CHRISTINE RIES, HELMUT KAGER, PHILIPP STADLER 1 Zusammenfassung: In diesem Beitrag wird der prinzipielle Ablauf
Herzlich Willkommen. Monika Hentschinski und Harry Wirth Referat Geodäsie (M5) Bundesanstalt für Gewässerkunde, Koblenz
 Bundesanstalt für Gewässerkunde, Koblenz") Herzlich Willkommen Monika Hentschinski und Harry Wirth Referat Geodäsie (M5) Bundesanstalt für Gewässerkunde, Koblenz Geodätische Woche Nürnberg, 27. - 29.09. 2011 Navigation mit GNSS und INS in der Hydrographie
Herzlich Willkommen Monika Hentschinski und Harry Wirth Referat Geodäsie (M5) Bundesanstalt für Gewässerkunde, Koblenz Geodätische Woche Nürnberg, 27. - 29.09. 2011 Navigation mit GNSS und INS in der Hydrographie
Aktuelle Anwendungen in der Fotogrammetrie
 Aktuelle Anwendungen in der Fotogrammetrie SOGI Feierabend Forum, Basel 19.11.2014 / Fabian Huber Folie 1 Agenda KOPA und KOPA Geoservices GmbH Fotogrammetrie heute Plattformen für fotogrammetrische Aufnahmen
Aktuelle Anwendungen in der Fotogrammetrie SOGI Feierabend Forum, Basel 19.11.2014 / Fabian Huber Folie 1 Agenda KOPA und KOPA Geoservices GmbH Fotogrammetrie heute Plattformen für fotogrammetrische Aufnahmen
Informationsveranstaltung 3D-Geobasisinformation die Produkte des LGLN. 3D-Messdaten Antje Tilsner
 Informationsveranstaltung 3D-Geobasisinformation die Produkte des LGLN 3D-Messdaten Antje Tilsner Gliederung Entstehung von 3D-Messdaten Photogrammetrie Airborne-Laserscanning Digitale Bildkorrelation
Informationsveranstaltung 3D-Geobasisinformation die Produkte des LGLN 3D-Messdaten Antje Tilsner Gliederung Entstehung von 3D-Messdaten Photogrammetrie Airborne-Laserscanning Digitale Bildkorrelation
Entwicklung, Kalibrierung und Evaluierung eines tragbaren direkt georeferenzierten Laserscanning Systems für kinematische Anwendungen
 Entwicklung, Kalibrierung und Evaluierung eines tragbaren direkt georeferenzierten Laserscanning Systems für kinematische Anwendungen Geodätische Woche 2015, Stuttgart Erik Heinz, Christian Eling, Lasse
Entwicklung, Kalibrierung und Evaluierung eines tragbaren direkt georeferenzierten Laserscanning Systems für kinematische Anwendungen Geodätische Woche 2015, Stuttgart Erik Heinz, Christian Eling, Lasse
Sensorenvergleich (Zeilen vs. Flächenscanner) Prof. Dr.-Ing. Manfred Ehlers
 Prof. Dr.-Ing. Manfred Ehlers") Sensorenvergleich (Zeilen vs. Flächenscanner) Prof. Dr.-Ing. Manfred Ehlers mehlers@igf.uni-osnabrueck.de Inhalt Sensorsysteme ADS-40 DMC Ultracam-D Flächen vs. Zeilensensor Geometrische Genauigkeit Pansharpening
Sensorenvergleich (Zeilen vs. Flächenscanner) Prof. Dr.-Ing. Manfred Ehlers mehlers@igf.uni-osnabrueck.de Inhalt Sensorsysteme ADS-40 DMC Ultracam-D Flächen vs. Zeilensensor Geometrische Genauigkeit Pansharpening
Landesweite Datenerhebung mit ALS: Technologische Herausforderungen und vielseitige GIS-Anwendungen
 Landesweite Datenerhebung mit ALS: Technologische Herausforderungen und vielseitige GIS-Anwendungen Roland WÜRLÄNDER, Wolfgang RIEGER, Peter DREXEL, Christian BRIESE Zusammenfassung Dieser Artikel erläutert
Landesweite Datenerhebung mit ALS: Technologische Herausforderungen und vielseitige GIS-Anwendungen Roland WÜRLÄNDER, Wolfgang RIEGER, Peter DREXEL, Christian BRIESE Zusammenfassung Dieser Artikel erläutert
10. Vermessungsingenieurtag Workshop 3 Mobile Mapping an der HFT Stuttgart
 10. Vermessungsingenieurtag Workshop 3 Mobile Mapping an der HFT Stuttgart M.Eng. Marius Ziegler Projektleiter: Prof. Dr. M. Hahn 07. November 2014 Mobile Mapping Kernelemente Messgeräte zur Positionsbestimmung
10. Vermessungsingenieurtag Workshop 3 Mobile Mapping an der HFT Stuttgart M.Eng. Marius Ziegler Projektleiter: Prof. Dr. M. Hahn 07. November 2014 Mobile Mapping Kernelemente Messgeräte zur Positionsbestimmung
Workshop. 3D-Punktwolken. Erstellung, Bearbeitung und Anwendung
 Workshop 3D-Punktwolken Erstellung, Bearbeitung und Anwendung Willkommen / Bienvenue Workshop 3D-Punktwolken 7. Juni 2016 GEOSummit, Bern Programm 9:00 Begrüssung, Einleitung und Einführungsreferat 9:20
Workshop 3D-Punktwolken Erstellung, Bearbeitung und Anwendung Willkommen / Bienvenue Workshop 3D-Punktwolken 7. Juni 2016 GEOSummit, Bern Programm 9:00 Begrüssung, Einleitung und Einführungsreferat 9:20
Workshop Nutzung von Mobile Mapping Daten für die Stadtmodellierung und Visualisierung
 Workshop Nutzung von Mobile Mapping Daten für die Stadtmodellierung und Visualisierung Workshop Nutzung von Mobile Mapping Daten für die Stadtmodellierung und Visualisierung Mobiles Laserscanning Straßenraum
Workshop Nutzung von Mobile Mapping Daten für die Stadtmodellierung und Visualisierung Workshop Nutzung von Mobile Mapping Daten für die Stadtmodellierung und Visualisierung Mobiles Laserscanning Straßenraum
Untersuchungen zur Genauigkeit eines integrierten terrestrischen Laserscanner-Kamera Systems
 Untersuchungen zur Genauigkeit eines integrierten terrestrischen Laserscanner-Kamera Systems Christian MULSOW, Danilo SCHNEIDER, Andreas ULLRICH und Nikolaus STUDNICKA Zusammenfassung Auf dem Laserscannermarkt
Untersuchungen zur Genauigkeit eines integrierten terrestrischen Laserscanner-Kamera Systems Christian MULSOW, Danilo SCHNEIDER, Andreas ULLRICH und Nikolaus STUDNICKA Zusammenfassung Auf dem Laserscannermarkt
Einführung absoluter Phasenzentrumskorrekturen. auf internationaler Ebene
 Einführung absoluter Phasenzentrumskorrekturen für GNSS-Antennen auf internationaler Ebene Ralf Schmid Institut für Astronomische und Physikalische Geodäsie, TU München Peter Steigenberger, Gerd Gendt,
Einführung absoluter Phasenzentrumskorrekturen für GNSS-Antennen auf internationaler Ebene Ralf Schmid Institut für Astronomische und Physikalische Geodäsie, TU München Peter Steigenberger, Gerd Gendt,
Visuelle Information zur robusten Zuordnung von Landmarken für die Navigation mobiler Roboter
 Visuelle Information zur robusten Zuordnung von Landmaren für die Navigation mobiler Roboter Forum Bildverarbeitung 2010 Thomas Emter Thomas Ulrich Loalisierung Herausforderungen Relative Sensoren (Dead
Visuelle Information zur robusten Zuordnung von Landmaren für die Navigation mobiler Roboter Forum Bildverarbeitung 2010 Thomas Emter Thomas Ulrich Loalisierung Herausforderungen Relative Sensoren (Dead
Aufnahme von Waldparametern mittels Drohnendaten
 Aufnahme von Waldparametern mittels Drohnendaten Workshop 02/2016 TLUG Jena Biotopkartierung in Thüringen PD Dr. Christian Thiel Waldparameter per Drohnendaten PD Dr. Christian Thiel 25. Februar 2016 1
Aufnahme von Waldparametern mittels Drohnendaten Workshop 02/2016 TLUG Jena Biotopkartierung in Thüringen PD Dr. Christian Thiel Waldparameter per Drohnendaten PD Dr. Christian Thiel 25. Februar 2016 1
Mobile Mapping. Eine Gegenüberstellung unterschiedlicher Verfahren zur Erfassung von Straßendaten. Christian Wever TopScan GmbH wever@topscan.
 Mobile Mapping Eine Gegenüberstellung unterschiedlicher Verfahren zur Erfassung von Straßendaten Christian Wever TopScan GmbH wever@topscan.de TopScan Gesellschaft zur Erfassung topographischer Information
Mobile Mapping Eine Gegenüberstellung unterschiedlicher Verfahren zur Erfassung von Straßendaten Christian Wever TopScan GmbH wever@topscan.de TopScan Gesellschaft zur Erfassung topographischer Information
Titelmaster. Absolute Antennenkalibrierung für geodätische Punktfelder. dm cm mm. Philipp Zeimetz
 igg Titelmaster Absolute Antennenkalibrierung für geodätische Punktfelder dm cm mm Philipp Zeimetz Institut für Geodäsie und Geoinformation Universität Bonn FGS 2010, Wettzell/Kötzting Gliederung Antennenproblem
igg Titelmaster Absolute Antennenkalibrierung für geodätische Punktfelder dm cm mm Philipp Zeimetz Institut für Geodäsie und Geoinformation Universität Bonn FGS 2010, Wettzell/Kötzting Gliederung Antennenproblem
Modelle und Systeme von Geodaten
 Modelle und Systeme von Geodaten Digitale Geländemodelle V/Ü: Kartographische Informationsverarbeitung Beschreibung der Geländeoberfläche Die Geländeoberfläche (Reliefoberfläche) wird beschrieben durch
Modelle und Systeme von Geodaten Digitale Geländemodelle V/Ü: Kartographische Informationsverarbeitung Beschreibung der Geländeoberfläche Die Geländeoberfläche (Reliefoberfläche) wird beschrieben durch
Auswertung von Bilddaten aus UAV Flügen Von der klassischen Aerotriangulation zum Dense Image. Matching
 Auswertung von Bilddaten aus UAV Flügen Von der klassischen Aerotriangulation zum Dense Image Rainer Brechtken Rouven Borchert Heinz Jürgen Przybilla Rene Marcel Roderweiß Matching Gliederung Einleitung
Auswertung von Bilddaten aus UAV Flügen Von der klassischen Aerotriangulation zum Dense Image Rainer Brechtken Rouven Borchert Heinz Jürgen Przybilla Rene Marcel Roderweiß Matching Gliederung Einleitung
Orientierungsbestimmung mobiler Objekte unter Verwendung von Magnet- und MEMS Inertialsensoren
 . Orientierungsbestimmung mobiler Objekte unter Verwendung von Magnet- und MEMS Inertialsensoren Geodätische Woche 2013 F. Zimmermann, C. Eling, L. Klingbeil, H. Kuhlmann 08.10.2013 Unmanned Aerial Vehicle
. Orientierungsbestimmung mobiler Objekte unter Verwendung von Magnet- und MEMS Inertialsensoren Geodätische Woche 2013 F. Zimmermann, C. Eling, L. Klingbeil, H. Kuhlmann 08.10.2013 Unmanned Aerial Vehicle
HafenCity Universität Hamburg. Fachbereich Geomatik. Betreut wurde diese Arbeit durch: Prof. Dipl.-Ing. Thomas Kersten (HafenCity Universität Hamburg)
") Genauigkeitsuntersuchung für die Erfassung dreidimensionaler Bestandsdaten von Verkehrsanlagen mittels Airborne und Mobile Laserscanning 4. Hamburger Anwenderforum Terrestrisches Laserscanning 23.06.2011
Genauigkeitsuntersuchung für die Erfassung dreidimensionaler Bestandsdaten von Verkehrsanlagen mittels Airborne und Mobile Laserscanning 4. Hamburger Anwenderforum Terrestrisches Laserscanning 23.06.2011
UAS-gestützte Datenerfassung für Anwendungen in der Landesvermessung
 1 Institut für Photogrammetrie ifp UAS-gestützte Datenerfassung für Anwendungen in der Landesvermessung Michael Cramer Hamburg, 11.-12. Juni 2014 Definition Landesvermessung Einführung Die Landesvermessung
1 Institut für Photogrammetrie ifp UAS-gestützte Datenerfassung für Anwendungen in der Landesvermessung Michael Cramer Hamburg, 11.-12. Juni 2014 Definition Landesvermessung Einführung Die Landesvermessung
Basisgrundlage für Desastermanagement Digitale Höhenmodelle generiert mit Airborne Laser Scanning Anwendungen aus Projekten
 Basisgrundlage für Desastermanagement Digitale Höhenmodelle generiert mit Airborne Laser Scanning Anwendungen aus Projekten Sven Jany Milan Flug GmbH, Schäfereistraße 24, 03130 Spremberg OT Schwarze Pumpe,
Basisgrundlage für Desastermanagement Digitale Höhenmodelle generiert mit Airborne Laser Scanning Anwendungen aus Projekten Sven Jany Milan Flug GmbH, Schäfereistraße 24, 03130 Spremberg OT Schwarze Pumpe,
UNI Duisburg-Essen FB11 Photogrammetrie-Klausur Teil Matrikel-Nr.:
 1. Nennen Sie je 2 typische Anwendungen aus den Bereichen (6 Punkte) a. Nahbereichsphotogrammetrie b. Luftbildphotogrammetrie c. Fernerkundung 2. Nennen Sie je 2 typische Sensoren aus den Bereichen (6
1. Nennen Sie je 2 typische Anwendungen aus den Bereichen (6 Punkte) a. Nahbereichsphotogrammetrie b. Luftbildphotogrammetrie c. Fernerkundung 2. Nennen Sie je 2 typische Sensoren aus den Bereichen (6
Workshop 4 Handheld Laserscanning mit dem ZEB1
 Workshop 4 Handheld Laserscanning mit dem ZEB1 Dipl.-Ing. (FH) Jörg Hepperle Hochschule für Technik Stuttgart Studienbereich Vermessung und Geoinformatik joerg.hepperle@hft-stuttgart.de 10. Vermessungsingenieurtag
Workshop 4 Handheld Laserscanning mit dem ZEB1 Dipl.-Ing. (FH) Jörg Hepperle Hochschule für Technik Stuttgart Studienbereich Vermessung und Geoinformatik joerg.hepperle@hft-stuttgart.de 10. Vermessungsingenieurtag
GLONASS-Satelliten-Antennen- Phasenzentrumsvariationen
 GLONASS-Satelliten-Antennen- Phasenzentrumsvariationen Andreas Gäde 1, U. Hugentobler 1, S. Schaer 1,2, R. Dach 1 1 2 Bundesamt für Landestopographie, Swisstopo Antennenworkshop, Bonn, 21.September 2006
GLONASS-Satelliten-Antennen- Phasenzentrumsvariationen Andreas Gäde 1, U. Hugentobler 1, S. Schaer 1,2, R. Dach 1 1 2 Bundesamt für Landestopographie, Swisstopo Antennenworkshop, Bonn, 21.September 2006
Erfassung untertägiger Hohlräume mit dem IPS-System bei der RAG Aktiengesellschaft Volker Spreckels, Andreas Schlienkamp
 Erfassung untertägiger Hohlräume mit dem IPS-System bei der Volker Spreckels, Andreas Schlienkamp IPS - Forschung und Entwicklung (FuE) Bei DLR entwickelt für Indoor-Navigation IPS = Integrated Positioning
Erfassung untertägiger Hohlräume mit dem IPS-System bei der Volker Spreckels, Andreas Schlienkamp IPS - Forschung und Entwicklung (FuE) Bei DLR entwickelt für Indoor-Navigation IPS = Integrated Positioning
Automatische Kalibrierung eines Kamerasystems zur Verkehrsdatenerfassung auf Basis von Navigationssensorik Sebastian Schulz, DLR-TS-ANL
 DLR.de Folie 1 03.03.2015, ASW 2016, Wildau Automatische Kalibrierung eines Kamerasystems zur Verkehrsdatenerfassung auf Basis von Navigationssensorik Sebastian Schulz, DLR-TS-ANL DLR.de Folie 2 Agenda
DLR.de Folie 1 03.03.2015, ASW 2016, Wildau Automatische Kalibrierung eines Kamerasystems zur Verkehrsdatenerfassung auf Basis von Navigationssensorik Sebastian Schulz, DLR-TS-ANL DLR.de Folie 2 Agenda
DGPF-Projekt: Evaluierung digitaler photogrammetrischer Kamerasysteme
 DGPF-Projekt: Evaluierung digitaler photogrammetrischer Kamerasysteme - Themenschwerpunkt Stereoplotting - Dreiländertagung 2010 der DGPF, SGPF und OVG Wien, Österreich 01.07.2010 Volker Spreckels, Andreas
DGPF-Projekt: Evaluierung digitaler photogrammetrischer Kamerasysteme - Themenschwerpunkt Stereoplotting - Dreiländertagung 2010 der DGPF, SGPF und OVG Wien, Österreich 01.07.2010 Volker Spreckels, Andreas
Anwendungsmöglichkeiten von Laserscannerdaten
 Anwendungsmöglichkeiten von Laserscannerdaten TopScan GmbH Christian Wever Düsterbergstr. 5 48432 Rheine TopScan GmbH gegründet 1991 in Stuttgart durch Dr. Peter Frieß und Dr. Joachim Lindenberger seit
Anwendungsmöglichkeiten von Laserscannerdaten TopScan GmbH Christian Wever Düsterbergstr. 5 48432 Rheine TopScan GmbH gegründet 1991 in Stuttgart durch Dr. Peter Frieß und Dr. Joachim Lindenberger seit
Die LiDAR Messkampagne und LiDAR Daten der swisstopo
 armasuisse Die LiDAR Messkampagne und LiDAR der swisstopo Anwendung von LiDAR im Wald: Praxisorientierte Informationsveranstaltung Luzern, 27. April 2010 Roberto Artuso / swisstopo Agenda swisstopo & LiDAR
armasuisse Die LiDAR Messkampagne und LiDAR der swisstopo Anwendung von LiDAR im Wald: Praxisorientierte Informationsveranstaltung Luzern, 27. April 2010 Roberto Artuso / swisstopo Agenda swisstopo & LiDAR
Ableitung von Bruch- bzw. Geländekanten aus LIDAR-Daten für die hydro-numerische Modellierung am Main
 Ableitung von Bruch- bzw. Geländekanten aus LIDAR-Daten für die hydro-numerische Modellierung am Main Gottfried Mandlburger Institut für Photogrammetrie und Fernerkundung, TU Wien gm@ipf.tuwien.ac.at 3D-Geländekanten
Ableitung von Bruch- bzw. Geländekanten aus LIDAR-Daten für die hydro-numerische Modellierung am Main Gottfried Mandlburger Institut für Photogrammetrie und Fernerkundung, TU Wien gm@ipf.tuwien.ac.at 3D-Geländekanten
GIS für die Wärmebedarfsprognose von Siedlungen am Beispiel des Scharnhauser Parks
 GIS für die Wärmebedarfsprognose von Siedlungen am Beispiel des Scharnhauser Parks Betreuung: Prof. Ursula Eicker GIS: Prof. Volker Coors zafh.net, Hochschule für Technik Stuttgart 1 POLYCITY Projekt EU
GIS für die Wärmebedarfsprognose von Siedlungen am Beispiel des Scharnhauser Parks Betreuung: Prof. Ursula Eicker GIS: Prof. Volker Coors zafh.net, Hochschule für Technik Stuttgart 1 POLYCITY Projekt EU
Erstellung eines flächendeckenden genauen digitalen Geländemodells für die autonome Provinz Bozen
 Erstellung eines flächendeckenden genauen digitalen Geländemodells für die autonome Provinz Bozen Roland WACK und Harald STELZL Zusammenfassung Dieses Paper gibt einen Überblick über das laufende Projekt
Erstellung eines flächendeckenden genauen digitalen Geländemodells für die autonome Provinz Bozen Roland WACK und Harald STELZL Zusammenfassung Dieses Paper gibt einen Überblick über das laufende Projekt
TopScan GmbH. Mobile Laser Scanning
 TopScan GmbH Mobile Laser Scanning Ein neues Verfahren zur Bestandsaufnahme TopScan Gesellschaft zur Erfassung topographischer Information mbh Christian Wever Düsterbergstr. 5 48432 Rheine Rheine, 2003
TopScan GmbH Mobile Laser Scanning Ein neues Verfahren zur Bestandsaufnahme TopScan Gesellschaft zur Erfassung topographischer Information mbh Christian Wever Düsterbergstr. 5 48432 Rheine Rheine, 2003
Entwicklung der Messtechnik am Beispiel von hochpräziser RTK-Positionierung mittels Galileo
 Geodäsie 4.0 - was erwartet uns Geodäten? Entwicklung der Messtechnik am Beispiel von hochpräziser RTK-Positionierung mittels Galileo Xiaoguang Luo Leica Geosystems AG, Heerbrugg Seminar an der HFT Stuttgart,
Geodäsie 4.0 - was erwartet uns Geodäten? Entwicklung der Messtechnik am Beispiel von hochpräziser RTK-Positionierung mittels Galileo Xiaoguang Luo Leica Geosystems AG, Heerbrugg Seminar an der HFT Stuttgart,
Evaluation of Digital Surface Models by Semi-Global Matching. Heiko Hirschmüller und Tilman Bucher
 Evaluation of Digital Surface Models by Semi-Global Matching Heiko Hirschmüller und Tilman Bucher Institut für Robotik und Mechatronik Folie 1 > SGM > Hirschmüller Inhalt Stereorekonstruktion bei DLR-RM
Evaluation of Digital Surface Models by Semi-Global Matching Heiko Hirschmüller und Tilman Bucher Institut für Robotik und Mechatronik Folie 1 > SGM > Hirschmüller Inhalt Stereorekonstruktion bei DLR-RM
Lokalisierung und Topologiekontrolle
 Lokalisierung und Topologiekontrolle Seminar: Kommunikation in drahtlosen Sensornetzwerken Martin Schmidt Einführung Lokalisierung: Für viele Informationen ist die Position wichtig Traditionelle Technik
Lokalisierung und Topologiekontrolle Seminar: Kommunikation in drahtlosen Sensornetzwerken Martin Schmidt Einführung Lokalisierung: Für viele Informationen ist die Position wichtig Traditionelle Technik
Digitale Höhenmodelle mittels Airborne-Laser-Scanning zum Küstenschutz
 Milan-Geoservice GmbH 1 Digitale Höhenmodelle mittels Airborne-Laser-Scanning zum Küstenschutz Assesso des Markscheidefachs Dipl.-Ing. Sven Jany MILAN Geoservice GmbH, Zum Tower 4, 01917 Kamenz s.jany@milan-geoservice.de
Milan-Geoservice GmbH 1 Digitale Höhenmodelle mittels Airborne-Laser-Scanning zum Küstenschutz Assesso des Markscheidefachs Dipl.-Ing. Sven Jany MILAN Geoservice GmbH, Zum Tower 4, 01917 Kamenz s.jany@milan-geoservice.de
Neue Vermessungswege mit Drohnen -
 Neue Vermessungswege mit Drohnen - Platzhalter für Bild / Grafik Wo UAV s die herkömmliche Vermessung ergänzen können Stefan Brumme, RIWA GmbH Aufzählung oder Text Begriffe / Glossar UAV (Unmanned Aerial
Neue Vermessungswege mit Drohnen - Platzhalter für Bild / Grafik Wo UAV s die herkömmliche Vermessung ergänzen können Stefan Brumme, RIWA GmbH Aufzählung oder Text Begriffe / Glossar UAV (Unmanned Aerial
LIDAR-Daten Kanton Bern
 Amt für Wald des Kantons Bern Laupenstrasse 22, 3011 Bern waldamt@vol.be.ch Office des forêts du canton de Berne Laupenstrasse 22, 3011 Berne waldamt@vol.be.ch LIDAR-Daten Kanton Bern Die LIDAR-Daten des
Amt für Wald des Kantons Bern Laupenstrasse 22, 3011 Bern waldamt@vol.be.ch Office des forêts du canton de Berne Laupenstrasse 22, 3011 Berne waldamt@vol.be.ch LIDAR-Daten Kanton Bern Die LIDAR-Daten des
Klassifizierung des kurzzeitigen Beobachtungsrauschens von 100 Hz GPS-Empfängern unter statischen und kinematischen Szenarien
 Klassifizierung des kurzzeitigen Beobachtungsrauschens von 100 Hz GPS-Empfängern unter statischen und kinematischen Szenarien - Geodätische Woche 2014, Berlin - Session 4: Angewandte Geodäsie und GNSS
Klassifizierung des kurzzeitigen Beobachtungsrauschens von 100 Hz GPS-Empfängern unter statischen und kinematischen Szenarien - Geodätische Woche 2014, Berlin - Session 4: Angewandte Geodäsie und GNSS
Mobile Mapping - Schnell und flexibel zur Punktwolke und zum 3D Modell
 Mobile Mapping - Schnell und flexibel zur Punktwolke und zum 3D Modell 10. Vermessungsingenieurtag 3. Geodätentag der HFT Stuttgart Prof. Dr. Michael Hahn, HFT Stuttgart 1 Übersicht Green Mobile Mapping
Mobile Mapping - Schnell und flexibel zur Punktwolke und zum 3D Modell 10. Vermessungsingenieurtag 3. Geodätentag der HFT Stuttgart Prof. Dr. Michael Hahn, HFT Stuttgart 1 Übersicht Green Mobile Mapping
Mobile Mapping auf der Straße und aus der Luft
 Mobile Mapping auf der Straße und aus der Luft Robert Hau; Nebel & Partner Nebel & Partner, R. Hau 7. Hamburger Forum für Geomatik "Mobile Mapping auf der Straße und aus der Luft" 1 Ingenieur- und Katastervermessung
Mobile Mapping auf der Straße und aus der Luft Robert Hau; Nebel & Partner Nebel & Partner, R. Hau 7. Hamburger Forum für Geomatik "Mobile Mapping auf der Straße und aus der Luft" 1 Ingenieur- und Katastervermessung
Vergleich digitaler Geländemodelle aus Photogrammetrie und Laserscanning
 Paper-ID: VGI 200334 Vergleich digitaler Geländemodelle aus Photogrammetrie und Laserscanning Maria Attwenger 1, Christian Briese 2 1 Institut für Photogrammetrie und Fernerkundung, Technische Universität
Paper-ID: VGI 200334 Vergleich digitaler Geländemodelle aus Photogrammetrie und Laserscanning Maria Attwenger 1, Christian Briese 2 1 Institut für Photogrammetrie und Fernerkundung, Technische Universität
Grundlagen und Verfahren der Luftbild Photogrammetrie
 Grundlagen und Verfahren der Luftbild Photogrammetrie Grundvorlesung in den Studiengängen Vermessung (3. Semester) und Geoinformatik (5. Semester) HS BO Lab. für Photogrammetrie: Grundlagen und Verfahren
Grundlagen und Verfahren der Luftbild Photogrammetrie Grundvorlesung in den Studiengängen Vermessung (3. Semester) und Geoinformatik (5. Semester) HS BO Lab. für Photogrammetrie: Grundlagen und Verfahren
Zusammenführung von LiDAR Daten aus terrestrischem und UAV-basiertem Laserscanning für eine optimale Objektabdeckung
 1 Zusammenführung von LiDAR Daten aus terrestrischem und UAV-basiertem Laserscanning für eine optimale Objektabdeckung Thomas GAISECKER 1,Ursula RIEGL 2, Martin PFENNIGBAUER 2 1 RIEGL Laser Measurement
1 Zusammenführung von LiDAR Daten aus terrestrischem und UAV-basiertem Laserscanning für eine optimale Objektabdeckung Thomas GAISECKER 1,Ursula RIEGL 2, Martin PFENNIGBAUER 2 1 RIEGL Laser Measurement
Evaluierung digitaler photogrammetrischer Kamerasysteme
 Institut für Photogrammetrie ifp Evaluierung digitaler photogrammetrischer Kamerasysteme DGPF-Projekt Michael Cramer michael.cramer@ifp.uni-stuttgart.de Projektsitzung DGPF Jahrestagung Oldenburg, 25.
Institut für Photogrammetrie ifp Evaluierung digitaler photogrammetrischer Kamerasysteme DGPF-Projekt Michael Cramer michael.cramer@ifp.uni-stuttgart.de Projektsitzung DGPF Jahrestagung Oldenburg, 25.
UAV/Drohne. Kompetenzen/Referenzen. Stand Donatsch + Partner AG. Prättigauerstrasse 34 CH Landquart
 UAV/Drohne Kompetenzen/Referenzen Stand 19.02.2016 Donatsch + Partner AG Prättigauerstrasse 34 CH -7302 Landquart +41 81 307 89 00 landquart@donatsch.ch 1 Vermessung aus der Luft Wir bieten nun seit 3
UAV/Drohne Kompetenzen/Referenzen Stand 19.02.2016 Donatsch + Partner AG Prättigauerstrasse 34 CH -7302 Landquart +41 81 307 89 00 landquart@donatsch.ch 1 Vermessung aus der Luft Wir bieten nun seit 3
Deformationsmessung mit Terrestrischem Laserscanning und Photogrammetrie. Martina Große-Schwiep, Heidi Hastedt und Thomas Luhmann
 Deformationsmessung mit Terrestrischem Laserscanning und Photogrammetrie Martina Große-Schwiep, Heidi Hastedt und Thomas Luhmann Inhalt Aufgabenstellung Messobjekt Motivation Photogrammetrische Aufnahme
Deformationsmessung mit Terrestrischem Laserscanning und Photogrammetrie Martina Große-Schwiep, Heidi Hastedt und Thomas Luhmann Inhalt Aufgabenstellung Messobjekt Motivation Photogrammetrische Aufnahme
Untersuchungen zum mobilen 3D-Scannen unter Tage bei K+S. Andreas Fischer, Andreas Schäfer
 Untersuchungen zum mobilen 3D-Scannen unter Tage bei K+S Andreas Fischer, Andreas Schäfer K+S KALI GmbH, Werk Werra ZUSAMMENFASSUNG: Im Rahmen einer Diplomarbeit an der TU Bergakademie Freiberg wurden
Untersuchungen zum mobilen 3D-Scannen unter Tage bei K+S Andreas Fischer, Andreas Schäfer K+S KALI GmbH, Werk Werra ZUSAMMENFASSUNG: Im Rahmen einer Diplomarbeit an der TU Bergakademie Freiberg wurden
GNSS in Geodäsie und Navigation
 GNSS in Geodäsie und Navigation Anwendungen und Beispiele aus dem Institut für Physikalische Geodäsie (IPGD) Stefan Leinen und Matthias Becker Hessische Auftakt-Veranstaltung European Satellite Navigation
GNSS in Geodäsie und Navigation Anwendungen und Beispiele aus dem Institut für Physikalische Geodäsie (IPGD) Stefan Leinen und Matthias Becker Hessische Auftakt-Veranstaltung European Satellite Navigation
Factsheet scan2map. Factsheet
 Factsheet KONZEPT In Zusammenarbeit mit der ETH Lausanne betreibt BSF Swissphoto ein kleines, flexibles und genaues luftgestütztes Messsystem (scan2map), welches einen Laserscanner, eine Digitalkamera
Factsheet KONZEPT In Zusammenarbeit mit der ETH Lausanne betreibt BSF Swissphoto ein kleines, flexibles und genaues luftgestütztes Messsystem (scan2map), welches einen Laserscanner, eine Digitalkamera
Hochgenaue Generierung des DGM vom vergletscherten Hochgebirge Potential von Airborne Laserscanning
 Hochgenaue Generierung des DGM vom vergletscherten Hochgebirge Potential von Airborne Laserscanning Dominik Lenhart¹, Helmut Kager², Konrad Eder³, Stefan Hinz¹, Uwe Stilla³ ¹Lehrstuhl für Methodik der
Hochgenaue Generierung des DGM vom vergletscherten Hochgebirge Potential von Airborne Laserscanning Dominik Lenhart¹, Helmut Kager², Konrad Eder³, Stefan Hinz¹, Uwe Stilla³ ¹Lehrstuhl für Methodik der
Einsatz fahrzeug- und helikopter gestützter Messsysteme für die Erfassung von Straßenbestandsdaten
 Einsatz fahrzeug- und helikopter gestützter Messsysteme für die Erfassung von Straßenbestandsdaten Robert Hau; Nebel & Partner Mobile Mapping 2013 Geodaten für die Mobilität der Zukunft 19. Juni 2013,
Einsatz fahrzeug- und helikopter gestützter Messsysteme für die Erfassung von Straßenbestandsdaten Robert Hau; Nebel & Partner Mobile Mapping 2013 Geodaten für die Mobilität der Zukunft 19. Juni 2013,
Quadrocopters and it s Applications: Overview of State of the Art Techniques
 : Overview of State of the Art Techniques Visual Tracking for Robotic Applications Sebastian Brunner Lehrstuhl für Echtzeitsysteme und Robotik Technische Universität München Email: brunnese@in.tum.de Date:
: Overview of State of the Art Techniques Visual Tracking for Robotic Applications Sebastian Brunner Lehrstuhl für Echtzeitsysteme und Robotik Technische Universität München Email: brunnese@in.tum.de Date:
Terrestrisches Laserscanning Ein allgemeiner Überblick über Messmethoden und Einsatzmöglichkeiten in der Geomatik. Hans-Martin Zogg, ETH Zürich
 Terrestrisches Laserscanning Ein allgemeiner Überblick über Messmethoden und Einsatzmöglichkeiten in der Geomatik Hans-Martin Zogg, ETH Zürich 2 Inhalt Terrestrisches Laserscanning Klassifizierung von
Terrestrisches Laserscanning Ein allgemeiner Überblick über Messmethoden und Einsatzmöglichkeiten in der Geomatik Hans-Martin Zogg, ETH Zürich 2 Inhalt Terrestrisches Laserscanning Klassifizierung von
Antennenkalibrierung im HF-Labor
 Titelmaster Antennenkalibrierung im HF-Labor - Genauigkeit, Nahfeldeinflüsse, Grenzen - Philipp Zeimetz, Heiner Kuhlmann Institut für Geodäsie und Geoinformation Universität Bonn Ideale Antenne 2 1.: PCO:
Titelmaster Antennenkalibrierung im HF-Labor - Genauigkeit, Nahfeldeinflüsse, Grenzen - Philipp Zeimetz, Heiner Kuhlmann Institut für Geodäsie und Geoinformation Universität Bonn Ideale Antenne 2 1.: PCO:
Die broadcast-ephemeriden der vier GNSS im Qualitätsvergleich
 Fakultät Umweltwissenschaften, Fachrichtung Geowissenschaften, Geodätisches Institut Susanne Beer Hael Sumaya Lambert Wanninger Motivation derzeit 4 GNSS, mit denen einzeln oder kombiniert Positionsbestimmungen
Fakultät Umweltwissenschaften, Fachrichtung Geowissenschaften, Geodätisches Institut Susanne Beer Hael Sumaya Lambert Wanninger Motivation derzeit 4 GNSS, mit denen einzeln oder kombiniert Positionsbestimmungen
Die broadcast-ephemeriden der vier GNSS im Qualitätsvergleich
 Fakultät Umweltwissenschaften, Fachrichtung Geowissenschaften, Geodätisches Institut Susanne Beer Hael Sumaya Lambert Wanninger Motivation derzeit 4 GNSS, mit denen einzeln oder kombiniert Positionsbestimmungen
Fakultät Umweltwissenschaften, Fachrichtung Geowissenschaften, Geodätisches Institut Susanne Beer Hael Sumaya Lambert Wanninger Motivation derzeit 4 GNSS, mit denen einzeln oder kombiniert Positionsbestimmungen
Hochauflösende Multisensor-Systeme
 Hochauflösende Multisensor-Systeme GERHARD KEMPER 1 Zusammenfassung: Die Entwicklung im Bereich der Sensorik ist rasant und höhere Leistung wird immer kompakter. Neben Laserscannern und RGB Flächensensoren
Hochauflösende Multisensor-Systeme GERHARD KEMPER 1 Zusammenfassung: Die Entwicklung im Bereich der Sensorik ist rasant und höhere Leistung wird immer kompakter. Neben Laserscannern und RGB Flächensensoren
Beschreibung des Verfahrens der Georeferenzierung von Karten der Preußischen Landesaufnahme sowie der Schmettau schen Karten
 Beschreibung des Verfahrens der Georeferenzierung von Karten der Preußischen Landesaufnahme sowie der Schmettau schen Karten Dokumentation über den Referenzierungsprozess anhand eines Probeblatts des Schmettau'schen
Beschreibung des Verfahrens der Georeferenzierung von Karten der Preußischen Landesaufnahme sowie der Schmettau schen Karten Dokumentation über den Referenzierungsprozess anhand eines Probeblatts des Schmettau'schen
INFRA BirdView. Luftbild-basierte dreidimensionale Infrastrukturerfassung und -abbildung
 INFRA BirdView Luftbild-basierte dreidimensionale Infrastrukturerfassung und -abbildung Agenda Ausgangslage & Motivation Voruntersuchungen Projektziel Vorgängige Tests Prozess Tests Erste Resultate 2 Ausgangslage
INFRA BirdView Luftbild-basierte dreidimensionale Infrastrukturerfassung und -abbildung Agenda Ausgangslage & Motivation Voruntersuchungen Projektziel Vorgängige Tests Prozess Tests Erste Resultate 2 Ausgangslage
ifp Mobile Mapping und Urban Modelling Möglichkeiten der photogrammetrischen Datenerfassung Institut für Photogrammetrie Prof. Dr.
 Mobile Mapping Muttenz Institut für Photogrammetrie Mobile Mapping und Urban Modelling Möglichkeiten der photogrammetrischen Datenerfassung Prof. Dr. Norbert Haala Fachtagung Mobile Mapping Muttenz, 19.
Mobile Mapping Muttenz Institut für Photogrammetrie Mobile Mapping und Urban Modelling Möglichkeiten der photogrammetrischen Datenerfassung Prof. Dr. Norbert Haala Fachtagung Mobile Mapping Muttenz, 19.
Hannover, DGPF Projekttreffen. Datenübersicht DMC Flüge Vaihingen. Britta Bernecker, Silke Bihlmaier
 Hannover, 13.11.2008 DGPF Projekttreffen Datenübersicht DMC Flüge Vaihingen Britta Bernecker, Silke Bihlmaier Inhalt Missionsübersicht Block Missionsübersicht Radiometrie Bildformate und Datenmenge Grid
Hannover, 13.11.2008 DGPF Projekttreffen Datenübersicht DMC Flüge Vaihingen Britta Bernecker, Silke Bihlmaier Inhalt Missionsübersicht Block Missionsübersicht Radiometrie Bildformate und Datenmenge Grid
Effiziente, berührungslose Erfassung der Gleisinfrastrukturobjekte
 Effiziente, berührungslose Erfassung der Gleisinfrastrukturobjekte Ein aktuelles Forschungsprojekt der ÖBB-Infrastruktur AG, ÖBB-Infrastruktur AG, Stab Forschung&Entwicklung 55 2 XXXX22 Organigramm ÖBB-Konzern
Effiziente, berührungslose Erfassung der Gleisinfrastrukturobjekte Ein aktuelles Forschungsprojekt der ÖBB-Infrastruktur AG, ÖBB-Infrastruktur AG, Stab Forschung&Entwicklung 55 2 XXXX22 Organigramm ÖBB-Konzern
Beifach Geodäsie für Geographie (B.Sc.)
") Grundmodule Modul Bezeichnung Semester Lehrformen Leistungspunkte BfGeodGeogB01 Terrestrische Datenerfassung 2. o. 4. 3V / 1Ü / 5P 7.0 BfGeodGeogB02 Photogrammetrie für Anwender 2. o. 4. 2V / 2Ü 5.0 Erweiterungsmodule
Grundmodule Modul Bezeichnung Semester Lehrformen Leistungspunkte BfGeodGeogB01 Terrestrische Datenerfassung 2. o. 4. 3V / 1Ü / 5P 7.0 BfGeodGeogB02 Photogrammetrie für Anwender 2. o. 4. 2V / 2Ü 5.0 Erweiterungsmodule
LiDAR Mobile Mapping
 Institut für Kartographie und Geoinformatik Leibniz Universität Hannover LiDAR Mobile Mapping Visualisierung, Vermessung, Fahrerassistenz Claus.Brenner@ikg.uni-hannover.de IKG Erfassungsfahrzeug Riegl
Institut für Kartographie und Geoinformatik Leibniz Universität Hannover LiDAR Mobile Mapping Visualisierung, Vermessung, Fahrerassistenz Claus.Brenner@ikg.uni-hannover.de IKG Erfassungsfahrzeug Riegl
Orientierung. HJ Przybilla
 Orientierung Der Begriff der Orientierung wird in der Photogrammetrie vielfach genutzt. Er beschreibt dabei die geometrischen Zusammenhänge im und um das Messbild. Innere Orientierung Äußere Orientierung
Orientierung Der Begriff der Orientierung wird in der Photogrammetrie vielfach genutzt. Er beschreibt dabei die geometrischen Zusammenhänge im und um das Messbild. Innere Orientierung Äußere Orientierung
Präzise Positions- und Orientierungsbestimmung eines UAVs in Echtzeit
 Geodätische Woche 08.-10. Oktober 2013 Präzise Positions- und Orientierungsbestimmung eines UAVs in Echtzeit Christian Eling, Lasse Klingbeil, Markus Wieland und Heiner Kuhlmann 08.10.2013 Inhaltsverzeichnis
Geodätische Woche 08.-10. Oktober 2013 Präzise Positions- und Orientierungsbestimmung eines UAVs in Echtzeit Christian Eling, Lasse Klingbeil, Markus Wieland und Heiner Kuhlmann 08.10.2013 Inhaltsverzeichnis
Neue Entwicklungen in der GNSS Technik
 Neue Entwicklungen in der GNSS Technik SONDIERUNG VERMESSUNG ABSTECKUNG ili gis-services Hersteller-unabhängiges Ingenieurbüro seit über 15 Jahren Maßgeschneiderte Hard- und Softwarekombinationen namhafter
Neue Entwicklungen in der GNSS Technik SONDIERUNG VERMESSUNG ABSTECKUNG ili gis-services Hersteller-unabhängiges Ingenieurbüro seit über 15 Jahren Maßgeschneiderte Hard- und Softwarekombinationen namhafter
Automatische Kalibrierung eines Kamerasystems zur Verkehrsdatenerfassung auf Basis von Navigationssensorik
 Stefan Kubica, Hagen Ringshausen, Jörg Reiff-Stephan, Marius Schlingelhoff (Hrsg.) 1. Automobil Symposium Wildau: Tagungsband Technische Hochschule Wildau 2016 Automatische Kalibrierung eines Kamerasystems
Stefan Kubica, Hagen Ringshausen, Jörg Reiff-Stephan, Marius Schlingelhoff (Hrsg.) 1. Automobil Symposium Wildau: Tagungsband Technische Hochschule Wildau 2016 Automatische Kalibrierung eines Kamerasystems
BIM im Bestand 3D-Aufmaß und Modellierung für die as-built Dokumentation
 BIM im Bestand 3D-Aufmaß und Modellierung für die as-built Dokumentation Überblick Anforderungen an die Bestandsdokumentation für BIM Messtechnologien Auswertesoftware PHIDIAS mit Bentley Building Designer
BIM im Bestand 3D-Aufmaß und Modellierung für die as-built Dokumentation Überblick Anforderungen an die Bestandsdokumentation für BIM Messtechnologien Auswertesoftware PHIDIAS mit Bentley Building Designer
Untersuchungen zu einem flugzeugbasierten Digitalkamera-System mit direkter Sensororientierung
 Untersuchungen zu einem flugzeugbasierten Digitalkamera-System mit direkter Sensororientierung CHRISTIAN MULSOW 1, DIRK HANNUSCH 2 Zusammenfassung: Am Institut für Photogrammetrie und Fernerkundung (IPF)
Untersuchungen zu einem flugzeugbasierten Digitalkamera-System mit direkter Sensororientierung CHRISTIAN MULSOW 1, DIRK HANNUSCH 2 Zusammenfassung: Am Institut für Photogrammetrie und Fernerkundung (IPF)
Der DGPF-Test zur Evaluation digitaler Luftbildkameras Überblick und Testdesign
 Der DGPF-Test zur Evaluation digitaler Luftbildkameras Überblick und Testdesign MICHAEL CRAMER 1 Zusammenfassung: Dieser Artikel konzentriert sich auf grundsätzliche Anmerkungen zum Test von digitalen
Der DGPF-Test zur Evaluation digitaler Luftbildkameras Überblick und Testdesign MICHAEL CRAMER 1 Zusammenfassung: Dieser Artikel konzentriert sich auf grundsätzliche Anmerkungen zum Test von digitalen
Weitere Aspekte zur Kalibrierung von GNSS Systemen
 Weitere Aspekte zur Kalibrierung von GNSS Systemen Gerhard Wübbena Martin Schmitz Geo++ Gesellschaft für satellitengestützte geodätische und navigatorische Technologien mbh D 30827 Garbsen, Germany http://www.geopp.de
Weitere Aspekte zur Kalibrierung von GNSS Systemen Gerhard Wübbena Martin Schmitz Geo++ Gesellschaft für satellitengestützte geodätische und navigatorische Technologien mbh D 30827 Garbsen, Germany http://www.geopp.de
Kinematische Bestandsdatenerfassung mit Laserscannern
 Kinematische Bestandsdatenerfassung mit Laserscannern 3D MAPPING Das Mobile Straßen Erfassungs- System (MoSES) Aufnahme des Straßen- oder Schienenkorridors mit ca. 40 m Breite Erfassung des Raumes mit
Kinematische Bestandsdatenerfassung mit Laserscannern 3D MAPPING Das Mobile Straßen Erfassungs- System (MoSES) Aufnahme des Straßen- oder Schienenkorridors mit ca. 40 m Breite Erfassung des Raumes mit