Praktikum Computational Intelligence 2 Ulrich Lehmann, Johannes Brenig, Michael Schneider
|
|
|
- Klaus Boer
- vor 6 Jahren
- Abrufe
Transkript


1 Praktikum Computational Intelligence 2 Ulrich Lehmann, Johannes Brenig, Michael Schneider Versuch: Fuzzy-Klimaregelung in MATLAB _CI2_Deckblatt_Fuzzy2
2
3 Inhaltsverzeichnis Inhaltsverzeichnis Release _Fuzzy_P1_Schn9 I Fuzzy-Klimaregelung in MATLAB... I-5 I.1 Versuchsanleitung... I-5 I.1.1 Lernziele... I-5 I.1.2 Aufgabenstellung Fuzzy-Klimaregelung... I-5 I.1.3 Versuchsdurchführung Fuzzy-Klimaregelung... I-6 I Struktur des Fuzzy-Reglers... I-6 I Membership-Funktionen... I-7 I Regelwerk... I-9 I Plausibilitätstest Regelwerk... I-10 I Validierung der Funktion des Fuzzy-Reglers mit gleitenden Eingangsgrößen... I-12 I Einbindung des Fuzzy-Reglers in die reale Regelstrecke und Ergänzung der Modellregelstrecke... I-16 I.2 Online-Anleitung für das Praktikum Fuzzy-Klimaregelung... I-20 I.2.1 Fuzzy-Control-Toolbox... I-20 I.2.2 Simulink für Fuzzy Control... I-32 Glossar... I-45 Abbildungsverzeichnis... I-50 Sachwortverzeichnis... I-51 Literaturverzeichnis I-3
4 Inhaltsverzeichnis I-4
5 I.1 Versuchsanleitung I Fuzzy-Klimaregelung in MATLAB I.1 Versuchsanleitung I.1.1 Lernziele 1. Einführung in die Entwicklungsumgebung MATLAB 2. Einführung in die Toolboxen Fuzzy- Logic und Simulink 3. Erlernen der notwendigen Schritte zur Erstellung eines Fuzzy-Blocks in Simulink 4. Testen eines Fuzzy-Reglers durch Vorgabe der Inputs und Visualisierung mit ruleview 5. Implementierung eines Fuzzy-Reglers in das Simulationsmodell einer realen Regelstrecke 6. Optimierung des Fuzzy-Reglers durch Modifikation der Fuzzyfizierung und des Regelwerkes I.1.2 Aufgabenstellung Fuzzy-Klimaregelung Es soll die Innentemperatur eines Bürogebäudes unter Berücksichtigung der Außentemperatur und Innentemperaturänderung mit einem Fuzzy-Regler konstant auf 20 C geregelt werden. Das zulässige Toleranzband beträgt +/-5%. I-5
6 I Fuzzy-Klimaregelung in MATLAB I.1.3 Versuchsdurchführung Fuzzy-Klimaregelung Es soll ein Fuzzy-Klimaregler vom Typ Mamdani programmiert werden. I Struktur des Fuzzy-Reglers 2 Eingangsgrößen (T, dt/dt) 1 Ausgangsgröße (y_heizen_kühlen) Mamdani-Typ Auswahl der Operatoren 1. And method: min (UND-Operator) Die Zugehörigkeitsfunktion der Schnittmenge zweier unscharfer Mengen à und B ist punktweise definiert durch: µ à B (x) = min (µ à (x), µ B (x)) 2. Or method: max (OR-Operator) Die Zugehörigkeitsfunktion der Vereinigungsmenge zweier unscharfer Mengen à und B ist definiert als: µ ÃUB (x) = max (µ à (x), µ B (x)) 3. Implikation: min Logische Operation "daraus folgt". Anm.: Die Implikation kann zur Auswertung von WENN-DANN-Regeln verwendet werden (die Weiterleitung des Ausgangswertes einer Regel auf die Lösungsmenge, z.b. mit Min oder Prod). 4. Aggregation: max Prämissenauswertung: Bestimmung des Zugehörigkeitsgrades der Prämisse einer linguistischen Regel durch Verknüpfung der Zugehörigkeitsgrade aller linguistischer Teilprämissen mittels Fuzzy- Operatoren (Zusammenfassung der Beiträge aller Regeln zum Ausgangssignal i.a. mit Fuzzy OR), Synonym Aggregation 5. Defuzzyfikation: centroid (Flächenschwerpunkt) Berechnung des Flächenschwerpunkts der Fuzzy-Ergebnismenge. Diese Methode ist präzise, aber auch rechenintensiv. 6. Konklusion: Schlußfolgerung (DANN-Teil) einer linguistischen Regel. Anm.: Die Konklusion kann aus einer oder mehreren linguistischen Teilkonklusionen bestehen (Fuzzy-Systeme vom Mamdani-Typ) oder ein funktionaler Zusammenhang der Eingangsgrößen sein (Fuzzy-Systeme vom Takagi-Sugeno-Typ). I-6

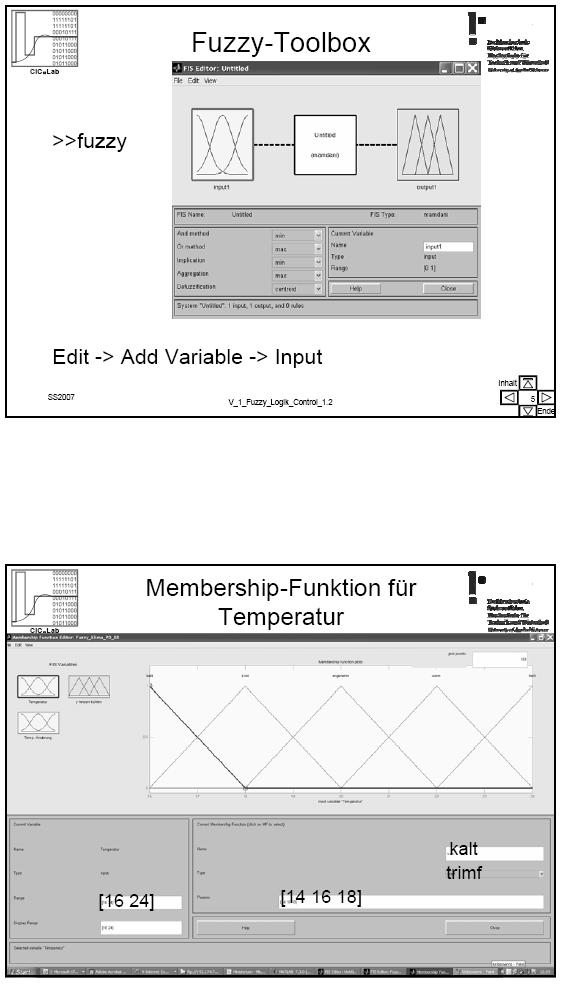
7 I.1 Versuchsanleitung Fuzzy-System vom Mamdani-Typ: Fuzzy-System, das linguistische Regeln mit einer oder mehreren linguistischen Teilkonklusionen verwendet Fuzzy-System vom Takagi-Sugeno-Typ: Fuzzy-System, das linguistische Regeln mit einem funktionalen Zusammenhang der Eingangsgrößen als Konklusion verwendet Um die Struktur einzugeben, starten Sie die Fuzzy-Toolbox, indem Sie im Command Window von MATLAB das Kommando >> fuzzy eingeben. Abbildung I.1: Mit dem FIS-Editor können Membership-Funktionen und das Regelwerk für den Fuzzy-Regler erstellt werden. I Membership-Funktionen Es soll eine Fuzzy-Klimaregelung für ein Bürogebäude implementiert werden: Die gemessene Temperatur T im Klimaraum soll 5 Zugehörigkeitsfunktionen zugeordnet werden. I-7
8 I Fuzzy-Klimaregelung in MATLAB Die Temperaturänderung (dt/dt) soll über einen zweiten Eingang erfasst werden Die Ausgangsgröße y soll 4 Kühlstufen, 2 Heizstufen und eine Neutralstellung einstellen können Die gemessene Temperatur soll 5 Zugehörigkeitsfunktionen "kalt", "kühl", "angenehm", "warm" und "heiß" zugeordnet werden. Der Zusammenhang Temperaturwert / Zugehörigkeitsfunktion wurden durch Befragung der Belegschaft ermittelt. Abbildung I.2: Zugehörigkeitsfuntkionen der Temperatur T Darüber hinaus soll die Tendenz der Änderung der Temperatur erfaßt und ausgewertet werden, um rechtzeitig gegensteuern zu können. Der Klimaexperte spricht von "es wird wärmer" bei einer Temperaturänderung von > 1 C/h und "es wird kälter" bei > -1 C/h. Abbildung I.3: Zugehörigkeitsfuntkionen der Temperaturänderung T I-8

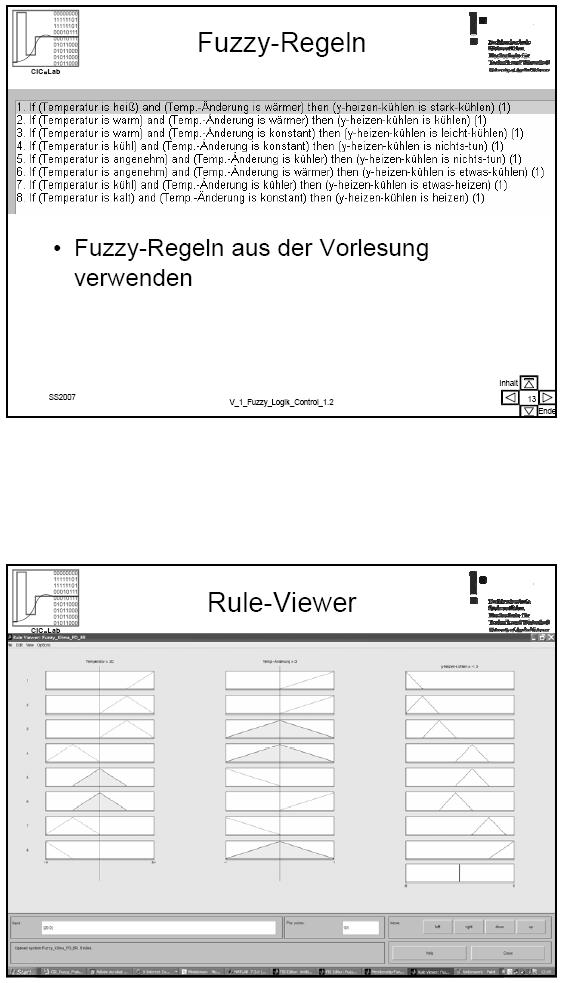
9 I.1 Versuchsanleitung Die Klimaanlage ist stufenlos einstellbar. Der Betrieb erfordert die Zustände "stark kühlen", "kühlen", "leicht kühlen", "etwas kühlen", "nichts tun", "etwas heizen" und "heizen". Abbildung I.4: Zugehörigkeitsfuntkionen der Ausgangsgröße y (kühlen/heizen) I Regelwerk Ein Klimaexperte liefert Ihnen wichtige Regeln für die Funktion des Systems: Wenn es heiß ist und wärmer wird, dann stark kühlen. Wenn es warm ist und wärmer wird, dann kühlen. Wenn es unverändert warm ist, dann leicht kühlen. Wenn es unverändert kühl ist, dann nichts tun. Wenn es angenehm ist und kühler wird, dann nichts tun. Wenn es angenehm ist und wärmer wird, dann etwas kühlen. Wenn es kühl ist und kühler wird, dann etwas heizen. Wenn es unverändert kalt ist, dann heizen. Diese bereits bekannten Regeln lassen sich in einer Tabelle zur besseren Übersicht zusammenfassen: Die Regeln können untereinander aufgeschrieben werden. 1. WENN es heiß ist UND wärmer wird, DANN stark kühlen. 2. WENN es warm ist UND wärmer wird, kühlen. 3. WENN es unverändert warm ist, leicht kühlen. 4. WENN es unverändert kühl ist, nichts tun. 5. WENN es angenehm ist UND kühler wird, nichts tun. 6. WENN es angenehm ist UND wärmer wird, etwas kühlen. 7. WENN es kühl ist UND kühler wird, etwas heizen 8. WENN es unverändert kalt ist, heizen. I-9
10 I Fuzzy-Klimaregelung in MATLAB Oder, noch besser, als Tabelle dargestellt werden: Tabelle I.1: bekannte Fuzzy-Regeln des Klimaexperten Füllen Sie Tabelle 1.1 mit den bekannten Regeln aus und ergänzen Sie die fehlenden Regeln sinnvoll. Geben Sie das Regelwerk in Ihr Modell ein. Wählen Sie bei der Erstellung des Regelwerkes geeignete Operatoren zur Verknüpfung der Membership-Funktionen. I Plausibilitätstest Regelwerk Lassen Sie sich danach die Regeln anzeigen (View->Rules). Sie sollten jetzt einen ersten Plausibilitätstest durchführen. Die beiden Inputwerte können mit dem Cursor im Wertebereich verschoben werden. Sie sehen für jede Regel Zeile 1 bis n die Teillösungsmenge in der rechten Spalte y_kühlen_heizen und unten rechts das Ergebnis der Defuzzyfizierung. I-10

11 I.1 Versuchsanleitung Abbildung I.5: Visualisierung des Regelwerkes Lassen Sie sich mit Surface-View das Kennfeld des Fuzzy-Reglers anzeigen und bewerten Sie dieses. Nichtdefinierte Bereiche werden je nach Entwicklungsumgebung durch sinnvolle Werte oder 0 belegt. Abbildung I.6: Kennfeld des Fuzzy-Reglers I-11

12 I Fuzzy-Klimaregelung in MATLAB Speichern Sie bitte Ihre Zwischenergebnisse auf einem geeigneten Medium unter dem Namen fuzzy_pd_klima_autor!!! I Validierung der Funktion des Fuzzy-Reglers mit gleitenden Eingangsgrößen Die Validierung des Fuzzy-Reglers erfolgt in Simulink. Exportieren Sie Ihr Fuzzy-Regelwerk in den Workspace von MATLAB. Starten Sie Simulink und legen Sie ein neues Modell an. Im Simulink Library Browser wählen Sie in der Fuzzy Logic Toolbox den Block Fuzzy Logic Controller with Ruleviewer aus und legen diesen in Ihrem neuen Modell ab. Abbildung I.7: Fuzzy Logic Controller with Ruleviewer in Simulink Nach einem Doppelklick auf den Block öffnet sich ein neues Fenster, in welchem Sie die Eigenschaften des Blocks bearbeiten können. Geben Sie den Namen Ihrer FIS-Matrix im Workspace ein. I-12

13 I.1 Versuchsanleitung Abbildung I.8: Eigenschaften des Fuzzy Logic Controller with Ruleviewer in Simulink Prüfen Sie den Fuzzy-Regler auf Funktion, indem Sie sich ein einfaches Modell in Simulink erstellen. Die Außentemperatur soll zwischen 15 C und 25 C sinusförmig (Amplitude 5) über 24h variieren. Die Simulationszeit wird in Simulink in Sekunden angegeben. Die Temperaturänderung pro h ist die Ableitung der Temperatur. Dazu benötigen Sie ein D-Glied und den Umrechnungsfaktor Gain mit 3600s. Lassen Sie sich das Ergebnis auf dem Scope ausgeben. Für eine schnelle Simulation erhöhen Sie die Refresh rate auf z.b. 100s im Fuzzy-Block (Abb. 1.7). Wählen Sie die Simulationsdauer 24x3600s (=1 Tag). Geben Sie in Simulink unter Simulation>Configuration Parameters bitte Fixed-Step mit einer Schrittweite von 1s ein. I-13

14 I Fuzzy-Klimaregelung in MATLAB Abbildung I.9: Einfaches Modell in Simulink zur Validierung des Fuzzyreglers bevor er im richtigen Simulationsmodell getestet wird. Funktioniert der Fuzzy-Regler an den Bandgrenzen für Input T und dt/dt korrekt? I-14

15 I.1 Versuchsanleitung -1 Abbildung I.10: Eigenschaften des Sinus-Blocks für die Temperaturänderung I-15
16 I Fuzzy-Klimaregelung in MATLAB I Einbindung des Fuzzy-Reglers in die reale Regelstrecke und Ergänzung der Modellregelstrecke Nun soll der zuvor entwickelte Fuzzy-Regler in die gegebene reale Regelstrecke der Klimaregelung eingbaut werden. Speichern Sie das Simulink-Modell von der Praktikumshomepage auf ein geeignetes Medium (z.b. USB-Stick, Festplatte, o.ä.) und starten es in Simulink. Speichern Sie Ihren Workspace auf einem geeigneten Medium. Abbildung I.11: Simulink-Modell der Regelstrecke der Klimaregelung Geben Sie die nichtlineare Kennlinie des Kühl-Heiz-Gerätes in die Lookup-Table ein. Sie können die Werte jedoch auch in einer Variablen im Workspace ablegen und diese in die Lookup-Table laden. I-16
17 I.1 Versuchsanleitung Abbildung I.12: nichtlineare Kennlinie Tabelle I.2: Funktionswerte zur nichtlinearen Kennlinie x-achse y-achse -8-1, , ,9-5 -0, , , , , ,5 2 0,8 3 0,92 4 0,97 5 1,00 Erstellen Sie sich 2 Variablen im Workspace: Inputvalues für die Werte der x-achse Tabledata für die Werte y-achse I-17

 Da die Tendenz der Temperatur (Temperaturänderung nach der Zeit: dt/dt) als Eingangssignal verarbeitet werden muss, ist es erforderlich, dieses Signal durch")
18 I Fuzzy-Klimaregelung in MATLAB Abbildung I.13: Eigenschaften des Blocks Lookup-Table Tragen Sie die Variablen gemäß Abb in die Lookup-Table ein. Sollte ein Fehler auftreten, sollten Sie das Format des Vektors überprüfen, da es sein kann, dass Sie diesen noch transponieren müssen. Verändern Sie das Modell der Regelstrecke so, dass der Fuzzy- Klimaregler das Modell regelt und ein geschlossener Regelkreis entsteht. Benötigte Komponenten: 1. D-Glied mit Verzögerung (D-T1-Glied) Da die Tendenz der Temperatur (Temperaturänderung nach der Zeit: dt/dt) als Eingangssignal verarbeitet werden muss, ist es erforderlich, dieses Signal durch Differentiation aus dem Signal Temperatur zu erzeugen. Die Temperatur kann einfach aus dem Prozessmodell (am Ausgang) abgegriffen werden. Wegen der festen Zeitdarstellung in s im Simulationssystem muss der Wert für die Einheit 1 C/h durch Multiplikation mit 3600 umgerechnet werden. D.h. eine konstante Temperaturänderung von 1 C/s entspricht einer Temperaturänderung von 3600 C/h. Das D-T1-Glied wird als Laplace- Übertragungsfunktion angegeben: Die Verzögerung 1. Ordnung (unter dem Bruchstrich) entspricht einem Tiefpassfilter mit der sehr niedrigen Grenzfrequenz von I-18


19 I.1 Versuchsanleitung f = ω/2π = 1/(360 2 π) = 4,42321E-06 Hz. Dies ist erforderlich, damit durch die Ableitung der Temperatur keine Störsignale erzeugt werden. 2. Begrenzung [engl. saturation] Dieser Block begrenzt bei Bedarf die Eingangsgrößen in den Fuzzy- Regler, damit sich die Eingänge in den Fuzzy-Regler immer im definierten Arbeitsbereich des Fuzzy-Reglers befinden. Befinden sich die Werte im nichtdefinierten Bereich des Reglers, liefert der Fuzzy- Regler keine korrekte Ausgangsgröße. Falls Sie diesen Block verwenden, achten Sie bitte auf die richtige Parametrisierung! 3. Fuzzy Logic Controller with Ruleviewer Dieser Block wurde zu Beginn des Praktikums entwickelt. Bauen Sie diese Blöcke in das Simulationsmodell ein und konfigurieren diese entsprechend. Wenn Sie Ihr Modell aufgebaut haben, starten Sie die Simulation und werten Sie die Ergebnisse im Scope aus. Regelt der Fuzzy- Regler auf die Zieltemperatur? Falls nicht, optimieren Sie den Regler so, wie Sie es in der Vorlesung gehört haben. Versuchen Sie die Zieltemperatur möglichst rasch zu erreichen und konstant zu regeln. Beachten Sie bitte, dass Sie nicht die Regelstrecke verändern können, denn diese ist ein Modell der Realität und deshalb unveränderbar. Sie können also nur am Regler eine Optimierung vornehmen. Das zulässige Toleranzband ist a = +/-5%. Die Regelgröße x = Temperatur soll so schnell wie möglich das Toleranzband erreichen. I-19
20 I Fuzzy-Klimaregelung in MATLAB I.2 Online-Anleitung für das Praktikum Fuzzy- Klimaregelung I.2.1 Fuzzy-Control-Toolbox Im Folgenden sind die PPT-Folien, die für die Anleitung der Studierenden im Praktikum während der Veranstaltung gezeigt werden, dargestellt. Die aktuelle Version der PPT-Folien mit Notizen ist im Intranet unter Lehmann/Download/Computational Intelligence 2- Praktikum zu finden. I-20
21 I.2 Online-Anleitung für das Praktikum Fuzzy-Klimaregelung I-21
22 I Fuzzy-Klimaregelung in MATLAB I-22

23 I.2 Online-Anleitung für das Praktikum Fuzzy-Klimaregelung I-23

24 I Fuzzy-Klimaregelung in MATLAB I-24

25 I.2 Online-Anleitung für das Praktikum Fuzzy-Klimaregelung I-25
26 I Fuzzy-Klimaregelung in MATLAB I-26

27 I.2 Online-Anleitung für das Praktikum Fuzzy-Klimaregelung I-27
28 I Fuzzy-Klimaregelung in MATLAB I-28

29 I.2 Online-Anleitung für das Praktikum Fuzzy-Klimaregelung I-29
30 I Fuzzy-Klimaregelung in MATLAB I-30
31 I.2 Online-Anleitung für das Praktikum Fuzzy-Klimaregelung I-31
32 I Fuzzy-Klimaregelung in MATLAB I.2.2 Simulink für Fuzzy Control I-32
33 I.2 Online-Anleitung für das Praktikum Fuzzy-Klimaregelung I-33

34 I Fuzzy-Klimaregelung in MATLAB I-34
35 I.2 Online-Anleitung für das Praktikum Fuzzy-Klimaregelung I-35

36 I Fuzzy-Klimaregelung in MATLAB I-36

37 I.2 Online-Anleitung für das Praktikum Fuzzy-Klimaregelung I-37
38 I Fuzzy-Klimaregelung in MATLAB I-38

39 I.2 Online-Anleitung für das Praktikum Fuzzy-Klimaregelung I-39

40 I Fuzzy-Klimaregelung in MATLAB I-40

41 I.2 Online-Anleitung für das Praktikum Fuzzy-Klimaregelung I-41
42 I Fuzzy-Klimaregelung in MATLAB I-42

43 I.2 Online-Anleitung für das Praktikum Fuzzy-Klimaregelung I-43

44 I Fuzzy-Klimaregelung in MATLAB I-44
45 Glossar Glossar MATLAB MATLAB ist eine Sprache zur Programmierung technischwissenschaftlicher Probleme, die es weitgehend erlaubt, diese und die zugehörigen Lösungen in der vertrauten mathematischen Notation auszudrücken. MATLAB ist Matrix-orientiert und erlaubt es, Probleme der Linearen Algebra in kompakter Form zu formulieren und zu lösen. MATLAB -Programme bestehen aus einer Folge von Anweisungen. Diese können interaktiv eingegeben werden. MATLAB stellt dazu nach dem Aufruf ein spezielles Fenster, das MATLAB Command Window zur Verfügung, in das man über die Tastatur Anweisungen eingibt. MATLAB liefert in der Regel zu jeder Eingabe eine Antwort, was man durch ein Semikolon am Ende der Eingabe verhindern kann. Man kann MATLAB -Programme auch im Stapelbetrieb ablaufen lassen, d.h. man schreibt alle Anweisungen eines MATLAB-Programmes in eine Datei, M-File genannt, und lässt dann das gesamte Programm in dieser Datei ausführen. Der Start wird durch Eingabe des Dateinamens im interaktiven Betrieb veranlaßt. Mischformen aus interaktivem und Stapelbetrieb sind möglich. Der interaktive Betrieb ist für kurze Programme sinnvoll, der Stapelbetrieb empfiehlt sich für kompliziertere Anweisungsfolgen. Simulink Simulink ist ein Programm zur Lösung linearer und nichtlinearer Differentialgleichungen, die das Verhalten physikalischer dynamischer Systeme durch ihre mathematischen Modelle beschreiben. Dazu besitzt Simulink eine graphische und blockorientierte Oberfläche, mit deren Hilfe die Gleichungen in Form von (Übertragungs-) Blöcken wie bei einem Wirkungsplan eingegeben und dargestellt werden. Eine große Anzahl an vordefinierten Blöcken sind in sogenannten Bibliotheken zusammengefasst. Mit Hilfe der Maus können die Blöcke auf die Arbeitsfläche gezogen und anschließend parametriert werden. Workspace Alle im Command Window verwendeten Variablen werden automatisch im sogenannten Workspace gespeichert. Im gleichnamigen Fenster werden Größe und Typ der verwendeten Variablen angezeigt. Durch Doppelklick auf die Variablen lassen sich deren Inhalt und Eigenschaften anzeigen und verändern. Der gesamte Workspace kann gespeichert und dann auch wieder geladen werden. Von Simulink aus können Variablen mit dem Block To Workspace in den Workspace geschrieben und mit dem Block From Workspace aus dem Workspace geladen. Die Parametrierung der Simulink- Blöcke kann über Variablen im Workspace geschehen. I-45
46 Glossar Toolbox In den sogenannten Toolboxen werden bereits entwickelte Algorithmen nach Themengebieten geordnet angeboten. Mit MATLAB können die bestehenden Algorithmen weiterentwickelt oder eigene entwickelt werden. Es existieren Toolboxen z. B. für Künstlich Neuronale Netze (nntool), Fuzzy Logic (fuzzy), Evolutionäre bzw. genetische Algorithmen (gatool), Bildverarbeitung, Signalverarbeitung, Identifikation, Reglerentwurf aber auch für Statistik, Optimierung,... Die Liste ist sehr umfangreich und wächst ständig. Saturation (Sättigung) Der Sättigungsblock zwingt einem Signal eine obere und untere Grenze auf. Befindet sich das Inputsignal zwischen der oberen und unteren Grenze, geht das Signal unverändert durch den Block. Befindet sich das Inputsignal außerhalb dieser Grenzen, wird es auf die obere oder untere Grenze gesetzt. Sind die Werte der oberen und unteren Grenze identisch, wird dieser Wert vom Block ausgegeben. Ruleviewer Mit dem Simulink-Block Fuzzy Logic Controller with Ruleviewer kann ein Fuzzy Inferenz System (FIS) implementiert werden, mit welchem die Regeln während der Simulation betrachtet werden können. Transponieren Es gibt verschiedene Möglichkeiten eine Matrize zu transponieren: >> a = transpose( b ) Oder >> a = b Transfer Fcn Der Block Transfer Fcn entspricht einem linearen, zeitinvarianten (LTI-) System. Dieses kann als Modell einer physikalischen Strecke betrachtet werden. Eine typische Aufgabe der Regelungstechnik ist es, das Übertragungsverhalten einer solchen Strecke je nach Wunsch oder Vorgabe zu verändern bzw. zu verbessern. Wichtige Ziele sind hierbei oft eine schnelle Dynamik sowie stationäre Genauigkeit des geregelten Systems. And method: min (UND-Operator) Die Zugehörigkeitsfunktion der Schnittmenge zweier unscharfer Mengen à und B ist punktweise definiert durch: µ à B (x) = min (µ à (x), µ B (x)) Or method: max (OR-Operator) Die Zugehörigkeitsfunktion der Vereinigungsmenge zweier unscharfer Mengen à und B ist definiert als: µ ÃUB (x) = max (µ à (x), µ B (x)) I-46
47 Glossar Implikation: min Logische Operation "daraus folgt". Anm.: Die Implikation kann zur Auswertung von WENN-DANN-Regeln verwendet werden (die Weiterleitung des Ausgangswertes einer Regel auf die Lösungsmenge, z.b. mit Min oder Prod). Aggregation: max Prämissenauswertung: Bestimmung des Zugehörigkeitsgrades der Prämisse einer linguistischen Regel durch Verknüpfung der Zugehörigkeitsgrade aller linguistischer Teilprämissen mittels Fuzzy- Operatoren (Zusammenfassung der Beiträge aller Regeln zum Ausgangssignal i.a. mit Fuzzy OR), Synonym Aggregation Defuzzyfikation: centroid (Flächenschwerpunkt) Berechnung des Flächenschwerpunkts der Fuzzy-Ergebnismenge. Diese Methode ist präzise, aber auch rechenintensiv. Konklusion: Schlußfolgerung (DANN-Teil) einer linguistischen Regel. Anm.: Die Konklusion kann aus einer oder mehreren linguistischen Teilkonklusionen bestehen (Fuzzy-Systeme vom Mamdani-Typ) oder ein funktionaler Zusammenhang der Eingangsgrößen sein (Fuzzy-Systeme vom Takagi-Sugeno-Typ). Fuzzy-Block: Mit einem Fuzzy-Block kann man den Fuzzy-Regler aus dem Workspace zur Simulation in Simulink nutzen. Fuzzy-Regler: Ein Fuzzy-Regler ist im Allgemeinen ein nichtlinearer Regler, welcher durch Anwendung von Methoden der Fuzzy-Logik dimensioniert wird. Input: Mit dem Input wird die Eingabe in den Fuzzy-Regler bezeichnet. Implementierung: Mit Implementierung ist das Einfügen eines neu entwickelten Systems oder Softwareteils in ein bestehendes System, das dadurch ergänzt wird, gemeint. Fuzzyfizierung: Fuzzyfizierung ist die Umwandlung einer numerischen Größe in Zugehörigkeitsgrade zu linguistischen Termen einer linguistischen Variablen. I-47
48 Glossar Regelwerk: Regelwerk, auch Regelbasis genannt, ist die Gesamtheit der linguistischen Regeln, die das vorhandene Wissen zum Erreichen bestimmter Ziele beschreiben. Toleranzband: Unter Toleranzband wird der Toleranzbereich verstanden, in den der Fuzzy-Regler die Regelstrecke regeln soll. Mamdani: Ein Fuzzy-System vom Mamdani-Typ ist ein Fuzzy-System, das linguistische Regeln mit einer oder mehreren linguistischen Teilkonklusionen verwendet. Command Window: Im Command Window von Matlab können Kommandos direkt eingegeben werden und es wird sofort das Ergebnis angezeigt. FIS-Editor: Der FIS-Editor wird über das Command Window in Matlab mit dem Kommando >>fuzzy aufgerufen. Im FIS-Editor können die Membership Funktionen und das Regelwerk für den Fuzzy-Regler erstellt werden. Membership-Funktion: Die Membership Funktion wird auch Zugehörigkeitsfunktion genannt. Sie ist eine Funktion, die jedem Element x aus dem im Allgemeinen numerischen Grundbereich einen Zugehörigkeitsgrad zu einer Fuzzy-Menge µ(x) zuordnet. Operator: Ein Fuzzy-Logik-Operator ist ein Operator, der in der Fuzzy-Logik zur Verknüpfung oder Modifikation von Fuzzy-Mengen verwendet wird (z.b. UND, ODER, NICHT). Plausibilitätstest: Mit einem Plausibilitätstest soll der Fuzzy-Regler auf einfache Art und Weise kontrolliert auf korrekte Dimensionierung getestet wirden. Surface-View: Mit dem Surface-View kann im FIS-Editor das Regelwerk 3- dimensional dargestellt werden. Validierung: Unter Validierung wird die Prüfung eines Lösungsansatzes in Bezug auf das zu lösende Problem genannt. I-48
49 Glossar Simulink Library Browser: Im Simulink Library Browser sind Standardblöcke zur Modellbildung in Simulink abgelegt. Scope: Mit dem Scope können Signale auf dem Bildschirm angezeigt werden. Refresh rate: Die Refresh rate gibt die Aktualisierungsrate im rule view des Fuzzy- Blocks an. Eine höhere Rate bedeutet, dass die Anzeige der Rules nicht so oft aktualisiert wird, wie bei einer geringeren Refresh rate. Die Simulationsgeschwindigkeit kann somit erhöht werden. Lookup-Table: Mit einer Lookup-Table können (nichtlineare) Kennlinien aufgrund gemessener Wertepaare in ein Simulink-Modell eingebaut werden. I-49
50 Abbildungsverzeichnis Abbildungsverzeichnis Abbildung I.1: Mit dem FIS-Editor können Membership- Funktionen und das Regelwerk für den Fuzzy-Regler erstellt werden.... I-7 Abbildung I.2: Zugehörigkeitsfuntkionen der Temperatur T... I-8 Abbildung I.3: Zugehörigkeitsfuntkionen der Temperaturänderung T... I-8 Abbildung I.4: Zugehörigkeitsfuntkionen der Ausgangsgröße y (kühlen/heizen)... I-9 Abbildung I.5: Visualisierung des Regelwerkes... I-11 Abbildung I.6: Kennfeld des Fuzzy-Reglers... I-11 Abbildung I.7: Fuzzy Logic Controller with Ruleviewer Abbildung I.8: Eigenschaften des Fuzzy Logic Controller with Ruleviewer Abbildung I.9: Einfaches Modell in Simulink zur Validierung Abbildung I.10: Eigenschaften des Sinus-Blocks für die Temperaturänderung... I-15 Abbildung I.11: Simulinkmodell der Regelstrecke der Klimaregelung... I-16 Abbildung I.12: nichtlineare Kennlinie... I-17 Abbildung I.13: Eigenschaften des Blocks lookup Table... I-18 Abbildung I.14: geschlossener Regelkreis mit Fuzzy- Klimaregler... Fehler! Textmarke nicht definiert. I-50
51 Sachwortverzeichnis Sachwortverzeichnis Aggregation... I-6, I-48 And method... I-6, I-47 Ausgangsgröße... I-6, I-8, I-9, I-19 Außentemperatur... I-13 Begrenzung... I-19 Command Window... I-7, I-46, I-49 Defuzzyfikation... I-6, I-48 Defuzzyfizierung... I-10 FIS-Editor... I-7, I-49 Fuzzy... I-5, I-6, I-7, I-10, I-11, I-12, I-13, I-14, I-16, I-18, I-19, I-20, I-21, I-33, I-47, I-48, I-49, I-50, I-54 Fuzzy-Block... I-13, I-48 Fuzzyfizierung... I-5, I-48 Fuzzy-Klimaregelung... I-5, I-6, I-7, I-21 Fuzzy-Klimaregler... I-6, I-18, I-20 Fuzzy-Regler... I-5, I-7, I-13, I-14, I-16, I-19, I-48, I-49 Fuzzy-Reglers... I-5, I-6, I-11, I-12, I-16, I-19 Fuzzy-System... I-7, I-49 Fuzzy-Toolbox... I-7 Implementierung... I-5, I-48 Implikation... I-6, I-48 Input... I-14, I-48 Konklusion... I-6, I-7, I-48 linguistische... I-7, I-49 Lookup Table... I-16, I-18, I-50 Lookup-Table... I-16 Mamdani... I-6, I-7, I-48, I-49 MATLAB... I-5, I-7, I-12, I-46, I-47, I-54 Membership-Funktion... I-49 Membership-Funktionen... I-7, I-10 nichtlineare Kennlinie... I-16, I-17 nichtlinearen Kennlinie... I-17 Online-Anleitung... I-21 Operator... I-6, I-47, I-49 Or method... I-6, I-47 OR-Operator... I-47 I-51
52 Sachwortverzeichnis Plausibilitätstest... I-3, I-10, I-49 Prämissenauswertung... I-6, I-48 Prozessmodell... I-18 Refresh rate...i-13, I-50 Regelkreis...I-18, I-20 Regeln... I-6, I-7, I-9, I-10, I-47, I-48, I-49 Regelwerk... I-7, I-9, I-10, I-12, I-49 Ruleviewer... I-12, I-13, I-19, I-47, I-51 Sättigung... I-47 saturation... I-19 Saturation... I-47 Scope... I-13, I-19, I-50 Simulink... I-5, I-12, I-13, I-14, I-16, I-33, I-46, I-47, I-48, I-50, I-54 Simulink Library Browser...I-12, I-50 Surface-View...I-11, I-49 Takagi-Sugeno... I-6, I-7, I-48 Temperaturänderung... I-7, I-8, I-13, I-15, I-16, I-18 Toleranzband... I-5, I-19, I-49 Toolbox... I-3, I-12, I-21, I-47 Transfer Fcn... I-47 Transponieren... I-47 UND-Operator... I-47 Validierung... I-3, I-12, I-14, I-49, I-51 Vereinigungsmenge... I-6, I-47 Workspace... I-12, I-16, I-17, I-46, I-48 Zugehörigkeitsfunktion... I-6, I-8, I-47, I-49 Zugehörigkeitsfuntkionen... I-8, I-9 I-52
53 Sachwortverzeichnis I-53
54 Literaturverzeichnis Literaturverzeichnis MATLAB in Simulink I-12 Hilfe K. Taubert, W. Wiedl: MATLAB in Simulink I-13 Einführung K. Taubert, W. Wiedl: Simulink des Fuzzyreglers bevor er im richtigen Simulationsmodell getestet wird. I-14 Einführung D. Abel: Kurzeinführung in Matlab/Simulink/Stateflow. RWTH Aachen, Version 2.6 vom J. Kahlert: Fuzzy Control für Ingenieure ISBN U. Lehmann: Downloads CI2 und Systemtechnik E-Learning Systemtechnik: Schlüsselwort: Systemtechnik VDI/VDE 3550 Blatt 2: Computational Intelligence, Fuzzy Logik und Fuzzy Control; Begriffe und Definitionen; Oktober
12.4 Fuzzy-Regler 405
 12.4 Fuzzy-Regler 405 12.4.5 Fuzzy Logic Toolbox von MATLAB Mit der Fuzzy Logic Toolbox kann man einen Fuzzy-Regler direkt über die commandline oder über eine graphische Benutzeroberfläche erstellen. Danach
12.4 Fuzzy-Regler 405 12.4.5 Fuzzy Logic Toolbox von MATLAB Mit der Fuzzy Logic Toolbox kann man einen Fuzzy-Regler direkt über die commandline oder über eine graphische Benutzeroberfläche erstellen. Danach
Anhang zum Kapitel 12: Intelligente Regelung Fuzzy-Regler
 376 Anhang zum Kapitel 12: Intelligente Regelung 12.2 Fuzzy-Regler 12.2 Fuzzy-Regler 377a 12.2.5a Fuzzy Logic Toolbox von MATLAB Mit der Fuzzy Logic Toolbox kann man einen Fuzzy-Regler direkt über die
376 Anhang zum Kapitel 12: Intelligente Regelung 12.2 Fuzzy-Regler 12.2 Fuzzy-Regler 377a 12.2.5a Fuzzy Logic Toolbox von MATLAB Mit der Fuzzy Logic Toolbox kann man einen Fuzzy-Regler direkt über die
Fuzzy Logik und negative Zahlen
 Fuzzy Logik und negative Zahlen Ablauf Unscharfe Mengen Fuzzyfizierung Fuzzy Operatoren Inferenz Defuzzyfizierung Ablauf Darstellung negativer Zahlen Vorzeichen und Betrag Exzess Einerkomplement Zweierkomplement
Fuzzy Logik und negative Zahlen Ablauf Unscharfe Mengen Fuzzyfizierung Fuzzy Operatoren Inferenz Defuzzyfizierung Ablauf Darstellung negativer Zahlen Vorzeichen und Betrag Exzess Einerkomplement Zweierkomplement
4. Vorlesung Fuzzy Systeme
 Soft Control (AT 3, RMA) 4. Vorlesung Fuzzy Systeme Fuzzy Inferenz 4. Vorlesung im Aufbau der Vorlesung 1. Einführung Soft Control: Definition und Abgrenzung, Grundlagen "intelligenter" Systeme 2. Wissensrepräsentation
Soft Control (AT 3, RMA) 4. Vorlesung Fuzzy Systeme Fuzzy Inferenz 4. Vorlesung im Aufbau der Vorlesung 1. Einführung Soft Control: Definition und Abgrenzung, Grundlagen "intelligenter" Systeme 2. Wissensrepräsentation
6. Vorlesung Fuzzy Systeme
 Soft Control (AT 3, RMA) 6. Vorlesung Fuzzy Systeme Entwurfsbeispiele 6. Vorlesung im Aufbau der Vorlesung 1. Einführung Soft Control: Definition und Abgrenzung, Grundlagen "intelligenter" Systeme 2. Wissensrepräsentation
Soft Control (AT 3, RMA) 6. Vorlesung Fuzzy Systeme Entwurfsbeispiele 6. Vorlesung im Aufbau der Vorlesung 1. Einführung Soft Control: Definition und Abgrenzung, Grundlagen "intelligenter" Systeme 2. Wissensrepräsentation
Praktikum Computational Intelligence 2 Ulrich Lehmann, Johannes Brenig, Michael Schneider
 Praktikum Computational Intelligence 2 Ulrich Lehmann, Johannes Brenig, Michael Schneider Versuch: Approximation einer Kennlinie mit einem Künstlich Neuronalen Netz (KNN) in MATLAB 28.01.2008 5_CI2_Deckblatt_Kennlinie_Matlab_Schn2.doc
Praktikum Computational Intelligence 2 Ulrich Lehmann, Johannes Brenig, Michael Schneider Versuch: Approximation einer Kennlinie mit einem Künstlich Neuronalen Netz (KNN) in MATLAB 28.01.2008 5_CI2_Deckblatt_Kennlinie_Matlab_Schn2.doc
Einführung in MATLAB + MATLAB Simulink. Dipl.-Inf. Markus Appel
 Einführung in MATLAB + MATLAB Simulink Dipl.-Inf. Markus Appel mappel@informatik.hu-berlin.de 28.10.2016 Was ist MATLAB? ein universelles Algebra-Programm zur Lösung mathematischer Probleme grafische Darstellung
Einführung in MATLAB + MATLAB Simulink Dipl.-Inf. Markus Appel mappel@informatik.hu-berlin.de 28.10.2016 Was ist MATLAB? ein universelles Algebra-Programm zur Lösung mathematischer Probleme grafische Darstellung
5. Vorlesung Fuzzy Systeme
 Soft Control (AT 3, RMA) 5. Vorlesung Fuzzy Systeme Fuzzy Control 5. Vorlesung im Aufbau der Vorlesung. Einführung Soft Control: Definition und Abgrenzung, Grundlagen "intelligenter" Systeme 2. Wissensrepräsentation
Soft Control (AT 3, RMA) 5. Vorlesung Fuzzy Systeme Fuzzy Control 5. Vorlesung im Aufbau der Vorlesung. Einführung Soft Control: Definition und Abgrenzung, Grundlagen "intelligenter" Systeme 2. Wissensrepräsentation
3. Vorlesung Fuzzy Systeme
 Soft Control (AT 3, RMA) 3. Vorlesung Fuzzy Systeme Fuzzy Mengen 3. Vorlesung im Aufbau der Vorlesung 1. Einführung Soft Control: Definition und Abgrenzung, Grundlagen "intelligenter" Systeme 2. Wissensrepräsentation
Soft Control (AT 3, RMA) 3. Vorlesung Fuzzy Systeme Fuzzy Mengen 3. Vorlesung im Aufbau der Vorlesung 1. Einführung Soft Control: Definition und Abgrenzung, Grundlagen "intelligenter" Systeme 2. Wissensrepräsentation
Kai Michels Frank Klawonn Rudolf Kruse Andreas Nürnberger. Fuzzy-Regelung. Grundlagen, Entwurf, Analyse. Mit 174 Abbildungen und 9 Tabellen.
 Kai Michels Frank Klawonn Rudolf Kruse Andreas Nürnberger Fuzzy-Regelung Grundlagen, Entwurf, Analyse Mit 174 Abbildungen und 9 Tabellen Springer Inhaltsverzeichnis 1. Grundlagen der Fuzzy-Systeme 1 1.1
Kai Michels Frank Klawonn Rudolf Kruse Andreas Nürnberger Fuzzy-Regelung Grundlagen, Entwurf, Analyse Mit 174 Abbildungen und 9 Tabellen Springer Inhaltsverzeichnis 1. Grundlagen der Fuzzy-Systeme 1 1.1
Kapitel L:IV. IV. Nichtklassische Logiken. Fuzzy-Mengen Modifizierer für Fuzzy-Mengen Operationen auf Fuzzy-Mengen Fuzzy-Inferenz Defuzzifizierung
 Kapitel L:IV IV. Nichtklassische Logiken Fuzzy-Mengen Modifizierer für Fuzzy-Mengen Operationen auf Fuzzy-Mengen Fuzzy-Inferenz Defuzzifizierung L:IV-45 Nonclassical Logics LETTMANN/STEIN 1998-2013 Aussagenlogik
Kapitel L:IV IV. Nichtklassische Logiken Fuzzy-Mengen Modifizierer für Fuzzy-Mengen Operationen auf Fuzzy-Mengen Fuzzy-Inferenz Defuzzifizierung L:IV-45 Nonclassical Logics LETTMANN/STEIN 1998-2013 Aussagenlogik
5 Fuzzy Unscharfe Mengen
 5 Fuzzy Unscharfe Mengen Fuzzy Unscharfe Mengen Motivation Einfaches Modell eines Fuzzy Reglers Unscharfe Mengen Interpretation linguistischer Werte Operationen auf unscharfen Mengen Fuzzy Relationen Fuzzy
5 Fuzzy Unscharfe Mengen Fuzzy Unscharfe Mengen Motivation Einfaches Modell eines Fuzzy Reglers Unscharfe Mengen Interpretation linguistischer Werte Operationen auf unscharfen Mengen Fuzzy Relationen Fuzzy
Einführung in Simulink
 Einführung in Simulink Inhalt 1 Grundlegendes... 2 2 Simulink starten... 2 3 Erstellen von Simulinkmodellen... 3 3.1 Platzieren und Verbinden der Simulinkblöcke... 3 3.2 Eintragen der Block-Parameter...
Einführung in Simulink Inhalt 1 Grundlegendes... 2 2 Simulink starten... 2 3 Erstellen von Simulinkmodellen... 3 3.1 Platzieren und Verbinden der Simulinkblöcke... 3 3.2 Eintragen der Block-Parameter...
Praktikum Computational Intelligence 2 Ulrich Lehmann, Johannes Brenig, Michael Schneider
 Praktikum Computational Intelligence 2 Ulrich Lehmann, Johannes Brenig, Michael Schneider Versuch: Training eines Künstlich Neuronalen Netzes (KNN) zur Approximation einer Kennlinie in JavaNNS 28.01.2008
Praktikum Computational Intelligence 2 Ulrich Lehmann, Johannes Brenig, Michael Schneider Versuch: Training eines Künstlich Neuronalen Netzes (KNN) zur Approximation einer Kennlinie in JavaNNS 28.01.2008
Fundamente der Computational Intelligence
 Wintersemester 2006/07 Fundamente der Computational Intelligence (Vorlesung) Prof. Dr. Günter Rudolph Fachbereich Informatik Lehrstuhl für Algorithm Engineering Kapitel 2: Fuzzy Systeme Inhalt Fuzzy Mengen
Wintersemester 2006/07 Fundamente der Computational Intelligence (Vorlesung) Prof. Dr. Günter Rudolph Fachbereich Informatik Lehrstuhl für Algorithm Engineering Kapitel 2: Fuzzy Systeme Inhalt Fuzzy Mengen
Regelungstechnik. Mehrgrößenregelung - Digitale Regelungstechnik- Fuzzy-Regelung von Gerd Schulz. Mit 118 Beispielen und 56 Aufgaben mit Lösungen
 Regelungstechnik Mehrgrößenregelung - Digitale Regelungstechnik- Fuzzy-Regelung von Gerd Schulz Mit 118 Beispielen und 56 Aufgaben mit Lösungen Oldenbourg Verlag München Wien I Mehrgrößen-Regelsysteme
Regelungstechnik Mehrgrößenregelung - Digitale Regelungstechnik- Fuzzy-Regelung von Gerd Schulz Mit 118 Beispielen und 56 Aufgaben mit Lösungen Oldenbourg Verlag München Wien I Mehrgrößen-Regelsysteme
Regelungstechnik für Ingenieure
 Manfred Reuter Serge Zacher Regelungstechnik für Ingenieure Analyse, Simulation und Entwurf von Regelkreisen 12., korrigierte und erweiterte Auflage Mit 388 Abbildungen, 11 Beispielen und 34 Aufgaben STUDIUM
Manfred Reuter Serge Zacher Regelungstechnik für Ingenieure Analyse, Simulation und Entwurf von Regelkreisen 12., korrigierte und erweiterte Auflage Mit 388 Abbildungen, 11 Beispielen und 34 Aufgaben STUDIUM
Ingenieurinformatik II Numerik für Ingenieure Teil 2
 Hochschule München, FK 03 MB SS 013 Name Vorname Matrikelnummer Sem.Gr. Hörsaal Platz Ingenieurinformatik II Numerik für Ingenieure Teil Bearbeitungszeit : 60 Minuten Aufgabensteller : Dr. Reichl Hilfsmittel
Hochschule München, FK 03 MB SS 013 Name Vorname Matrikelnummer Sem.Gr. Hörsaal Platz Ingenieurinformatik II Numerik für Ingenieure Teil Bearbeitungszeit : 60 Minuten Aufgabensteller : Dr. Reichl Hilfsmittel
Der Fuzzy Regler, ein nicht-linearer Regelkreis
 Der Fuzzy Regler, ein nicht-linearer Regelkreis Einleitung Das englische Wort fuzzy steht für kraus, unscharf, verschwommen. Fuzzy ist die Erweiterung der Logik auf unscharfe Zustände. Der Digitaltechnik
Der Fuzzy Regler, ein nicht-linearer Regelkreis Einleitung Das englische Wort fuzzy steht für kraus, unscharf, verschwommen. Fuzzy ist die Erweiterung der Logik auf unscharfe Zustände. Der Digitaltechnik
Inhaltsverzeichnis. Angelika Bosl. Einführung in MATLAB/Simulink. Berechnung, Programmierung, Simulation. ISBN (Buch):
:") Inhaltsverzeichnis Angelika Bosl Einführung in MATLAB/Simulink Berechnung, Programmierung, Simulation ISBN (Buch): 978-3-446-42589-7 ISBN (E-Book): 978-3-446-42894-2 Weitere Informationen oder Bestellungen
Inhaltsverzeichnis Angelika Bosl Einführung in MATLAB/Simulink Berechnung, Programmierung, Simulation ISBN (Buch): 978-3-446-42589-7 ISBN (E-Book): 978-3-446-42894-2 Weitere Informationen oder Bestellungen
3 Kurzeinführung in Matlab
 3 Kurzeinführung in Matlab Matlab ist ein sehr leistungsfähiges interaktives Programmpaket für numerische Berechnungen. Nutzen Sie dies parallel zu den Vorlesungen. Sie können damit persönlich erfahren,
3 Kurzeinführung in Matlab Matlab ist ein sehr leistungsfähiges interaktives Programmpaket für numerische Berechnungen. Nutzen Sie dies parallel zu den Vorlesungen. Sie können damit persönlich erfahren,
Fuzzy Systeme vom Typ 1. Inhalt Fuzzy Mengen Fuzzy Relationen Fuzzy Logik Approximatives Schließen Fuzzy Regelung
 Fuzzy Systeme vom Typ Sommersemester 2008 Ausgewählte Kapitel der Computational Intelligence (Vorlesung) Inhalt Fuzzy Mengen Fuzzy Relationen Fuzzy Logik Fuzzy Regelung Prof. Dr. Günter Rudolph Fachbereich
Fuzzy Systeme vom Typ Sommersemester 2008 Ausgewählte Kapitel der Computational Intelligence (Vorlesung) Inhalt Fuzzy Mengen Fuzzy Relationen Fuzzy Logik Fuzzy Regelung Prof. Dr. Günter Rudolph Fachbereich
Inhaltsverzeichnis. Heinz Mann, Horst Schiffelgen, Rainer Froriep. Einführung in die Regelungstechnik
 Inhaltsverzeichnis Heinz Mann, Horst Schiffelgen, Rainer Froriep Einführung in die Regelungstechnik Analoge und digitale Regelung, Fuzzy-Regler, Regel-Realisierung, Software ISBN: 978-3-446-41765-6 Weitere
Inhaltsverzeichnis Heinz Mann, Horst Schiffelgen, Rainer Froriep Einführung in die Regelungstechnik Analoge und digitale Regelung, Fuzzy-Regler, Regel-Realisierung, Software ISBN: 978-3-446-41765-6 Weitere
FELJC Fuzzyregler.odt 1. a) Die Vorgehensweise der klassischen Regelungstechnik
 Die Vorgehensweise der klassischen Regelungstechnik") FELJC Fuzzyregler.odt 1 Fuzzy-Regler In diesem Kurs werden nur die Grundlagen anhand von Beispielen behandelt. Für Fuzzifizierung, Inferenz und Defuzzifizierung gibt es viele unterschiedliche Methoden,
FELJC Fuzzyregler.odt 1 Fuzzy-Regler In diesem Kurs werden nur die Grundlagen anhand von Beispielen behandelt. Für Fuzzifizierung, Inferenz und Defuzzifizierung gibt es viele unterschiedliche Methoden,
Eine kleine Anleitung zum Programmieren mit MATLAB
 Eine kleine Anleitung zum Programmieren mit MATLAB Kathrin Smetana 4. Oktober 2011 Dies ist eine (stetig erweiterbare) Liste der Dinge, die man beachten sollte, wenn man mit Matlab programmieren, sprich
Eine kleine Anleitung zum Programmieren mit MATLAB Kathrin Smetana 4. Oktober 2011 Dies ist eine (stetig erweiterbare) Liste der Dinge, die man beachten sollte, wenn man mit Matlab programmieren, sprich
Duale Regelungstechnik
 Prof. Dr.-lng. Serge Zacher Duale Regelungstechnik Methoden und Werkzeuge der lnformationstechnologie für die Regelungstechnik mit Prozessrechnern VDE VERLAG GMBH Inhalt 1 1.1 1.2 1.3 1.4 1.4.1 1.4.2 1.4.3
Prof. Dr.-lng. Serge Zacher Duale Regelungstechnik Methoden und Werkzeuge der lnformationstechnologie für die Regelungstechnik mit Prozessrechnern VDE VERLAG GMBH Inhalt 1 1.1 1.2 1.3 1.4 1.4.1 1.4.2 1.4.3
Fuzzy Control. Mit 304 Bildern und 46 Tabellen
 Fuzzy Control Optimale Nachbildung und Entwurf optimaler Entscheidungen von Dr.-Ing. Mario Koch, Dr.-Ing. Thomas Kuhn und Professor Dr.-Ing. habil Jürgen Wernstedt Technische Universität Ilmenau Mit 304
Fuzzy Control Optimale Nachbildung und Entwurf optimaler Entscheidungen von Dr.-Ing. Mario Koch, Dr.-Ing. Thomas Kuhn und Professor Dr.-Ing. habil Jürgen Wernstedt Technische Universität Ilmenau Mit 304
Kontinuierliche und diskrete Systeme
 Kontinuierliche und diskrete Systeme Analoge Signale existieren zu jedem Zeitpunkt. Um ein analoges (kontinuierliches) Signal zu erzeugen, verwendet man entweder eine rein kontinuierliche Quelle ( Signal
Kontinuierliche und diskrete Systeme Analoge Signale existieren zu jedem Zeitpunkt. Um ein analoges (kontinuierliches) Signal zu erzeugen, verwendet man entweder eine rein kontinuierliche Quelle ( Signal
Einführung in die Regelungstechnik
 Heinz Mann f Horst Schiffelgen f Rainer Froriep Einführung in die Regelungstechnik Analoge und digitale Regelung, Fuzzy-Regler, Regler-Realisierung, Software 11., neu bearbeitete Auflage Mit 356 Bildern
Heinz Mann f Horst Schiffelgen f Rainer Froriep Einführung in die Regelungstechnik Analoge und digitale Regelung, Fuzzy-Regler, Regler-Realisierung, Software 11., neu bearbeitete Auflage Mit 356 Bildern
Regelungstechnik für Ingenieure
 Serge Zacher Manfred Reuter Regelungstechnik für Ingenieure Analyse, Simulation und Entwurf von Regelkreisen 13., überarbeitete und erweiterte Auflage Mit 397 Abbildungen, 96 Beispielen und 32 Aufgaben
Serge Zacher Manfred Reuter Regelungstechnik für Ingenieure Analyse, Simulation und Entwurf von Regelkreisen 13., überarbeitete und erweiterte Auflage Mit 397 Abbildungen, 96 Beispielen und 32 Aufgaben
Praktikum Computational Intelligence 2 Ulrich Lehmann, Johannes Brenig, Michael Schneider
 Praktikum Computational Intelligence 2 Ulrich Lehmann, Johannes Brenig, Michael Schneider Versuch: Künstlich Neuronales Netz (KNN) zur Modellierung der magnetischen Flussdichte 28.01.2008 6_CI2_Deckblatt_Kugel_Matlab_2.doc
Praktikum Computational Intelligence 2 Ulrich Lehmann, Johannes Brenig, Michael Schneider Versuch: Künstlich Neuronales Netz (KNN) zur Modellierung der magnetischen Flussdichte 28.01.2008 6_CI2_Deckblatt_Kugel_Matlab_2.doc
Crash-Kurs Regelungstechnik
 Dr.-Ing. Jörg Kahlert Crash-Kurs Regelungstechnik Eine praxisorientierte Einführung mit Begleit-Software VDE VERLAG GMBH Berlin Offenbach Inhaltsverzeichnis 1 Einführung 11 1.1 Aufgaben der Regelungstechnik
Dr.-Ing. Jörg Kahlert Crash-Kurs Regelungstechnik Eine praxisorientierte Einführung mit Begleit-Software VDE VERLAG GMBH Berlin Offenbach Inhaltsverzeichnis 1 Einführung 11 1.1 Aufgaben der Regelungstechnik
Einführung in MATLAB
 Einführung in MATLAB Warum MATLAB? Messdaten sammeln Datenverarbeitung Graphische Darstellung 27.03.2019 EINFÜHRUNG IN MATLAB 2 Warum MATLAB? t = [1.0, 2.0, 3.0, ] v = [2.1, 4.2, 6.3, ] m = 3.14 E = ½
Einführung in MATLAB Warum MATLAB? Messdaten sammeln Datenverarbeitung Graphische Darstellung 27.03.2019 EINFÜHRUNG IN MATLAB 2 Warum MATLAB? t = [1.0, 2.0, 3.0, ] v = [2.1, 4.2, 6.3, ] m = 3.14 E = ½
Einführung in die Regelungstechnik
 Einführung in die Regelungstechnik Heinz Mann, Horst Schiffelgen, Rainer Froriep Analoge und digitale Regelung, Fuzzy-Regler, Regel- Realisierung, Software ISBN 3-446-40303-5 Inhaltsverzeichnis Weitere
Einführung in die Regelungstechnik Heinz Mann, Horst Schiffelgen, Rainer Froriep Analoge und digitale Regelung, Fuzzy-Regler, Regel- Realisierung, Software ISBN 3-446-40303-5 Inhaltsverzeichnis Weitere
JEFIS. Java Expert Fuzzy Inference System Masterprojekt. Stefan Becker Frank Volkmer Alex Besstschastnich
 JEFIS Java Expert Fuzzy Inference System Masterprojekt Stefan Becker Frank Volkmer Alex Besstschastnich 20.06.2008 Einleitung Projektaufbau Infrastruktur Fuzzy Logik Regelauswertung GUI und Vorführung
JEFIS Java Expert Fuzzy Inference System Masterprojekt Stefan Becker Frank Volkmer Alex Besstschastnich 20.06.2008 Einleitung Projektaufbau Infrastruktur Fuzzy Logik Regelauswertung GUI und Vorführung
Mathematische Computer-Software
 Mathematische Computer-Software Kommerzielle Computeralgebrasysteme (CAS) Beispiele: Mathematica, Maple, Numerisches und symbolisches Verarbeiten von Gleichungen: Grundrechenarten Ableitung und Integration
Mathematische Computer-Software Kommerzielle Computeralgebrasysteme (CAS) Beispiele: Mathematica, Maple, Numerisches und symbolisches Verarbeiten von Gleichungen: Grundrechenarten Ableitung und Integration
Inhalt. Mehr Informationen zum Titel
 Mehr Informationen zum Titel Inhalt 1 Einführung 15 1.1 Aufgaben der Regelungstechnik... 15 1.2 Steuern oder Regeln?... 15 1.3 Regelkreise im Wirkungsplan... 20 1.4 Festwert- und Folgeregelung... 21 1.4.1
Mehr Informationen zum Titel Inhalt 1 Einführung 15 1.1 Aufgaben der Regelungstechnik... 15 1.2 Steuern oder Regeln?... 15 1.3 Regelkreise im Wirkungsplan... 20 1.4 Festwert- und Folgeregelung... 21 1.4.1
Einführung in die Regelungstechnik
 Heinz Mann t Horst Schiffelgen Rainer Froriep Einführung in die Regelungstechnik Analoge und digitale Regelung, Fuzzy-Regler, Regler-Realisierung, Software 9. Auflage mit 364 Bildern HANSER Einleitung
Heinz Mann t Horst Schiffelgen Rainer Froriep Einführung in die Regelungstechnik Analoge und digitale Regelung, Fuzzy-Regler, Regler-Realisierung, Software 9. Auflage mit 364 Bildern HANSER Einleitung
Regelungstechnik 1 Praktikum Versuch 5.1
 Regelungstechnik 1 Praktikum Versuch 5.1 1 Reglereinstellung mit Rechnersimulation 1.1 Allgemeines In diesem Versuch sollen ausgehend von einer optimalen Reglereinstellung die Einflüsse der Reglerparameter
Regelungstechnik 1 Praktikum Versuch 5.1 1 Reglereinstellung mit Rechnersimulation 1.1 Allgemeines In diesem Versuch sollen ausgehend von einer optimalen Reglereinstellung die Einflüsse der Reglerparameter
Matlab. Alexandra Mehlhase & Felix Böckelmann. 26. Juni Analysetechniken in der Softwaretechnik Technische Universität Berlin SS 2008
 Was ist /Simulink Modellierung mit Modellierung mit /Simulink Vergleich -Modelica Analysetechniken in der Softwaretechnik Technische Universität Berlin SS 2008 26. Juni 2008 Inhaltsverzeichnis Was ist
Was ist /Simulink Modellierung mit Modellierung mit /Simulink Vergleich -Modelica Analysetechniken in der Softwaretechnik Technische Universität Berlin SS 2008 26. Juni 2008 Inhaltsverzeichnis Was ist
Strings. Daten aus Dateien einlesen und in Dateien speichern.
 Strings. Daten aus Dateien einlesen und in Dateien speichern. Strings Ein String ist eine Zeichenkette, welche von MATLAB nicht als Programmcode interpretiert wird. Der Ausdruck 'a' ist ein String bestehend
Strings. Daten aus Dateien einlesen und in Dateien speichern. Strings Ein String ist eine Zeichenkette, welche von MATLAB nicht als Programmcode interpretiert wird. Der Ausdruck 'a' ist ein String bestehend
Praktikum Computational Intelligence 2 Ulrich Lehmann, Johannes Brenig, Michael Schneider
 Praktikum Computational Intelligence 2 Ulrich Lehmann, Johannes Brenig, Michael Schneider Versuch: Training des XOR-Problems mit einem Künstlichen Neuronalen Netz (KNN) in JavaNNS 11.04.2011 2_CI2_Deckblatt_XORbinaer_JNNS_2
Praktikum Computational Intelligence 2 Ulrich Lehmann, Johannes Brenig, Michael Schneider Versuch: Training des XOR-Problems mit einem Künstlichen Neuronalen Netz (KNN) in JavaNNS 11.04.2011 2_CI2_Deckblatt_XORbinaer_JNNS_2
*** Viel Erfolg!!! ***
 Hochschule München, FK 03 SS 2018 Ingenieurinformatik Numerik für Ingenieure Studienbeginn vor WS13/14 (Kombinationsprüfung) ** Studienbeginn ab WS13/14 bis WS15/16 ** Studienbeginn ab SS16 bis WS17/18
Hochschule München, FK 03 SS 2018 Ingenieurinformatik Numerik für Ingenieure Studienbeginn vor WS13/14 (Kombinationsprüfung) ** Studienbeginn ab WS13/14 bis WS15/16 ** Studienbeginn ab SS16 bis WS17/18
TREFFPUNKT MATLAB WS 14/15. Einführung 1. Institut für Regelungstechnik
 TREFFPUNKT MATLAB WS 14/15 Institut für Regelungstechnik 16.10.2014 Einführung 1 Dipl.-Ing. (FH) Daniel Zöller, M. Sc. tpm@irt.rwth-aachen.de Dipl.-Ing. Martina Josevska, M. Sc. tpm@irt.rwth-aachen.de
TREFFPUNKT MATLAB WS 14/15 Institut für Regelungstechnik 16.10.2014 Einführung 1 Dipl.-Ing. (FH) Daniel Zöller, M. Sc. tpm@irt.rwth-aachen.de Dipl.-Ing. Martina Josevska, M. Sc. tpm@irt.rwth-aachen.de
Fuzzy-Logic. René K. Bokor - 5 HBa Fuzzy Logic Seite: 1
 Fuzzy-Logic Einleitung In den letzten Jahren kommt die Theorie der unscharfen Mengen, auch Fuzzy Sets genannt, immer mehr Bedeutung zu. Das nun folgende Referat soll einen Überblick über die wesentlichen
Fuzzy-Logic Einleitung In den letzten Jahren kommt die Theorie der unscharfen Mengen, auch Fuzzy Sets genannt, immer mehr Bedeutung zu. Das nun folgende Referat soll einen Überblick über die wesentlichen
Anbindung realer Strecken an Matlab/Simulink
 Anbindung realer Strecken an Matlab/Simulink Dipl.-Ing. Mark Müller 1 Inhalt 1. Einführung 2. Konzept des "Hardware-in-the-Loop" 3. Der Real Time Workshop 4. Beispiel: Durchflussregelung 5. Beispiel für
Anbindung realer Strecken an Matlab/Simulink Dipl.-Ing. Mark Müller 1 Inhalt 1. Einführung 2. Konzept des "Hardware-in-the-Loop" 3. Der Real Time Workshop 4. Beispiel: Durchflussregelung 5. Beispiel für
Kapitel 2: Fuzzy Systeme
 Kapitel 2: Fuzzy Systeme Wintersemester 2005/06 Fundamente der Computational Intelligence (Vorlesung) Prof. Dr. Günter Rudolph Fachbereich Informatik Lehrstuhl für Algorithm Engineering Inhalt Fuzzy Mengen
Kapitel 2: Fuzzy Systeme Wintersemester 2005/06 Fundamente der Computational Intelligence (Vorlesung) Prof. Dr. Günter Rudolph Fachbereich Informatik Lehrstuhl für Algorithm Engineering Inhalt Fuzzy Mengen
Schülerworkshop Computertomographie Mathematik als Schlüsseltechnologie
 Schülerworkshop Computertomographie Mathematik als Schlüsseltechnologie Peter Quiel 1. und 2. Juni 2007 MATLAB-Einführung Überblick Für die nächsten 1 ½ Stunden ist MATLAB unser Thema! Was ist MATLAB,
Schülerworkshop Computertomographie Mathematik als Schlüsseltechnologie Peter Quiel 1. und 2. Juni 2007 MATLAB-Einführung Überblick Für die nächsten 1 ½ Stunden ist MATLAB unser Thema! Was ist MATLAB,
Fuzzy-Inferenz. Fuzzy-Inferenz. Fuzzy-Inferenz. Fuzzy-Inferenz. Klassische Logik. Aussagenlogische Regel: a b
 Fuzzy-Inferenz Fuzzy-Inferenz Klassische Logik. Produktionsregelsystem D, R mit D = {a} und R = {a b} Schlußfolgern mit Forward-Chaining (Modus Ponens, MP): a height is tall {0, 1} b weight is heavy {0,
Fuzzy-Inferenz Fuzzy-Inferenz Klassische Logik. Produktionsregelsystem D, R mit D = {a} und R = {a b} Schlußfolgern mit Forward-Chaining (Modus Ponens, MP): a height is tall {0, 1} b weight is heavy {0,
Ingenieurinformatik Teil 2 (Numerik für Ingenieure)
") Hochschule München, FK 03 WS 2014/15 Ingenieurinformatik Teil 2 (Numerik für Ingenieure) Zulassung geprüft: Die Prüfung ist nur dann gültig, wenn Sie die erforderliche Zulassungsvoraussetzung erworben
Hochschule München, FK 03 WS 2014/15 Ingenieurinformatik Teil 2 (Numerik für Ingenieure) Zulassung geprüft: Die Prüfung ist nur dann gültig, wenn Sie die erforderliche Zulassungsvoraussetzung erworben
GERICHTETER GEWICHTETER GRAPH DESIGNDOKUMENT
 User Requirements GERICHTETER GEWICHTETER GRAPH DESIGNDOKUMENT Softwareentwicklung Praktikum, Übungsbeispiel 1 Gruppe 18 Andreas Hechenblaickner [0430217] Daniela Kejzar [0310129] Andreas Maller [0431289]
User Requirements GERICHTETER GEWICHTETER GRAPH DESIGNDOKUMENT Softwareentwicklung Praktikum, Übungsbeispiel 1 Gruppe 18 Andreas Hechenblaickner [0430217] Daniela Kejzar [0310129] Andreas Maller [0431289]
Lies die folgenden Seiten durch, bearbeite die Aufgaben und vergleiche mit den Lösungen.
 -1- Selbst lernen: Einführung in den Graphikrechner TI-84 Plus Das Graphikmenü des TI84-Plus Lies die folgenden Seiten durch, bearbeite die Aufgaben und vergleiche mit den Lösungen. 1 Grundsätzliches Die
-1- Selbst lernen: Einführung in den Graphikrechner TI-84 Plus Das Graphikmenü des TI84-Plus Lies die folgenden Seiten durch, bearbeite die Aufgaben und vergleiche mit den Lösungen. 1 Grundsätzliches Die
Druckregelung mit WAGO und WinFACT 7 (BORIS)
") Druckregelung mit WAGO und WinFACT 7 (BORIS) 1.) Aufrufen des Programms WinFACT 7 (BORIS) Über die Start Menüleiste gelangen Sie über Programme, WinFACT 7 und Blockorientierte Simulation BORIS in das Simulationsprogramm.
Druckregelung mit WAGO und WinFACT 7 (BORIS) 1.) Aufrufen des Programms WinFACT 7 (BORIS) Über die Start Menüleiste gelangen Sie über Programme, WinFACT 7 und Blockorientierte Simulation BORIS in das Simulationsprogramm.
Die Beschreibung von Signalen und Systemen kann in verschiedenen Bereichen erfolgen:
 1 Grundlegende Begriffe 1.1 Signale und Systeme ein Signal: ein System: ist ein Satz von Daten setzt Signale in Beziehung Darstellung: Die Beschreibung von Signalen und Systemen kann in verschiedenen Bereichen
1 Grundlegende Begriffe 1.1 Signale und Systeme ein Signal: ein System: ist ein Satz von Daten setzt Signale in Beziehung Darstellung: Die Beschreibung von Signalen und Systemen kann in verschiedenen Bereichen
Zusammenfassung der 6. Vorlesung
 Zusammenfassung der 6. Vorlesung Dynamische Systeme 2-ter Ordnung (PT 2 -System) Schwingungsfähige Systeme 2-ter Ordnung. - Systeme mit Speicher für potentielle und kinetische Energie - Beispiel: Feder-Masse-Dämpfer
Zusammenfassung der 6. Vorlesung Dynamische Systeme 2-ter Ordnung (PT 2 -System) Schwingungsfähige Systeme 2-ter Ordnung. - Systeme mit Speicher für potentielle und kinetische Energie - Beispiel: Feder-Masse-Dämpfer
Übung April Was ist Matlab? Aufgabe 1.1: Hochschule Bochum Sommersemester 2014 Vorlesung Autonome Roboter Prof. Dr.
 Hochschule Bochum Sommersemester 2014 Vorlesung Autonome Roboter Prof. Dr. Marco Schmidt Übung 1 01. April 2014 Aufgabe 1.1: 1 Was ist Matlab? MATLAB ist ein Programm für numerische Berechnungen, das insbesondere
Hochschule Bochum Sommersemester 2014 Vorlesung Autonome Roboter Prof. Dr. Marco Schmidt Übung 1 01. April 2014 Aufgabe 1.1: 1 Was ist Matlab? MATLAB ist ein Programm für numerische Berechnungen, das insbesondere
Mathematica kompakt. Einführung-Funktionsumfang-Praxisbeispiele von Dipl.-Math.Christian H.Weiß. Oldenbourg Verlag München
 Mathematica kompakt Einführung-Funktionsumfang-Praxisbeispiele von Dipl.-Math.Christian H.Weiß Oldenbourg Verlag München Inhaltsverzeichnis Vorwort Tabellenverzeichnis VII XVII 1 Einleitung 1 1 Grundlagen
Mathematica kompakt Einführung-Funktionsumfang-Praxisbeispiele von Dipl.-Math.Christian H.Weiß Oldenbourg Verlag München Inhaltsverzeichnis Vorwort Tabellenverzeichnis VII XVII 1 Einleitung 1 1 Grundlagen
Fuzzy-Logik und Fuzzy-Control
 Georg Jaanineh / Markus Maijohann Fuzzy-Logik und Fuzzy-Control Vogel Buchverlag Inhaltsverzeichnis Vorwort 5 TEIL1 1 Einleitung 13 2 Klassische Mengen und klassische Logik 17 2.1 Klassische Mengen 17
Georg Jaanineh / Markus Maijohann Fuzzy-Logik und Fuzzy-Control Vogel Buchverlag Inhaltsverzeichnis Vorwort 5 TEIL1 1 Einleitung 13 2 Klassische Mengen und klassische Logik 17 2.1 Klassische Mengen 17
Einführung in die Regelungstechnik
 Heinz Mann t Horst Schiffeigen t Rainer Froriep Einführung in die Regelungstechnik Analoge und digitale Regelung, Fuzzy-Regler, Regler-Realisierung, Software 10., neu bearbeitete Auflage mit 379 Bildern
Heinz Mann t Horst Schiffeigen t Rainer Froriep Einführung in die Regelungstechnik Analoge und digitale Regelung, Fuzzy-Regler, Regler-Realisierung, Software 10., neu bearbeitete Auflage mit 379 Bildern
Regelung einer Luft-Temperatur-Regelstrecke
 Technische Universität Berlin Fakultät IV Elektrotechnik und Informatik Fachgebiet Regelungssysteme Leitung: Prof. Dr.-Ing. Jörg Raisch Praktikum Grundlagen der Regelungstechnik Regelung einer Luft-Temperatur-Regelstrecke
Technische Universität Berlin Fakultät IV Elektrotechnik und Informatik Fachgebiet Regelungssysteme Leitung: Prof. Dr.-Ing. Jörg Raisch Praktikum Grundlagen der Regelungstechnik Regelung einer Luft-Temperatur-Regelstrecke
Regelungs- und Systemtechnik 1 - Übungsklausur 2
 4 6 Fachgebiet Regelungstechnik Leiter: Prof. Dr.-Ing. Johann Reger Bearbeitungszeit: 12 Min Modalitäten Es sind keine Hilfsmittel zugelassen. Bitte schreiben Sie mit dokumentenechtem Schreibgerät (Tinte
4 6 Fachgebiet Regelungstechnik Leiter: Prof. Dr.-Ing. Johann Reger Bearbeitungszeit: 12 Min Modalitäten Es sind keine Hilfsmittel zugelassen. Bitte schreiben Sie mit dokumentenechtem Schreibgerät (Tinte
Fuzzy Control methodenorientiert. von Universitätsprofessor Dr. rer. nat. Harro Kiendl Mit 212 Bildern
 Fuzzy Control methodenorientiert von Universitätsprofessor Dr. rer. nat. Harro Kiendl Mit 212 Bildern R. Oldenbourg Verlag München Wien 1997 Inhaltsverzeichnis Vorwort XI 1 Einführung 1 1.1 Entstellung
Fuzzy Control methodenorientiert von Universitätsprofessor Dr. rer. nat. Harro Kiendl Mit 212 Bildern R. Oldenbourg Verlag München Wien 1997 Inhaltsverzeichnis Vorwort XI 1 Einführung 1 1.1 Entstellung
Einführung in die Fuzzy Logik
 Einführung in die Fuzzy Logik Einleitung und Motivation Unscharfe Mengen fuzzy sets Zugehörigkeitsfunktionen Logische Operatoren IF-THEN-Regel Entscheidungsfindung mit dem Fuzzy Inferenz-System Schlußbemerkungen
Einführung in die Fuzzy Logik Einleitung und Motivation Unscharfe Mengen fuzzy sets Zugehörigkeitsfunktionen Logische Operatoren IF-THEN-Regel Entscheidungsfindung mit dem Fuzzy Inferenz-System Schlußbemerkungen
3 Geoverarbeitung mit dem ModelBuilder
 3.1 Der ModelBuilder in ArcGIS Mit dem ModelBuilder können schematisch und mithilfe von Grafiken Arbeitsabläufe mit den Werkzeugen von ArcGIS erstellt und bearbeitet werden. Ein solcher Arbeitsablauf (Workflow)
3.1 Der ModelBuilder in ArcGIS Mit dem ModelBuilder können schematisch und mithilfe von Grafiken Arbeitsabläufe mit den Werkzeugen von ArcGIS erstellt und bearbeitet werden. Ein solcher Arbeitsablauf (Workflow)
FPGA Systementwurf. Rosbeh Etemadi. Paderborn University. 29. Mai 2007
 Paderborn Center for Parallel l Computing Paderborn University 29. Mai 2007 Übersicht 1. FPGAs 2. Entwicklungssprache VHDL 3. Matlab/Simulink 4. Entwicklungssprache Handel-C 5. Fazit Übersicht FPGAs 1.
Paderborn Center for Parallel l Computing Paderborn University 29. Mai 2007 Übersicht 1. FPGAs 2. Entwicklungssprache VHDL 3. Matlab/Simulink 4. Entwicklungssprache Handel-C 5. Fazit Übersicht FPGAs 1.
PRAKTIKUMSVERSUCH M/S 2
 Fakultät Informatik, Institut für Angewandte Informatik, Professur Technische Informationssysteme PRAKTIKUMSVERSUCH M/S 2 Betreuer: Dipl.-Ing. Burkhard Hensel Dr.-Ing. Alexander Dementjev ALLGEMEINE BEMERKUNGEN
Fakultät Informatik, Institut für Angewandte Informatik, Professur Technische Informationssysteme PRAKTIKUMSVERSUCH M/S 2 Betreuer: Dipl.-Ing. Burkhard Hensel Dr.-Ing. Alexander Dementjev ALLGEMEINE BEMERKUNGEN
Einführung in CAE-Systeme
 Einführung in CAE-Systeme Dipl.-Ing. Mark Müller 1 Inhalt 1. Motivation für CAE-Werkzeuge 2. Modellierung technischer Prozesse 3. Übersicht über CAE-Simulationssysteme Kommerzielle Programme Freeware 4.
Einführung in CAE-Systeme Dipl.-Ing. Mark Müller 1 Inhalt 1. Motivation für CAE-Werkzeuge 2. Modellierung technischer Prozesse 3. Übersicht über CAE-Simulationssysteme Kommerzielle Programme Freeware 4.
Simulation of Mechatronic Systems
 Anmerkungen: Prüfung WS 2003-2004 Aufgabenblätter auf Vollständigkeit überprüfen Nur Blätter mit Namen und Matr.Nr. werden korrigiert. Keine rote Farbe verwenden. Zu jeder Lösung Aufgabennummer angeben.
Anmerkungen: Prüfung WS 2003-2004 Aufgabenblätter auf Vollständigkeit überprüfen Nur Blätter mit Namen und Matr.Nr. werden korrigiert. Keine rote Farbe verwenden. Zu jeder Lösung Aufgabennummer angeben.
Technische Informatik für Ingenieure Winter 2005/2006 Übungsblatt Nr. 3
 Technische Informatik für Ingenieure Winter 2005/2006 Übungsblatt Nr. 3 Dr. Ekkart Kindler FG Softwaretechnik Institut für Informatik Übungsgruppenleiter: M.-R. Brojerdi H. Selke M. Meyer M.Tichy E. Münch
Technische Informatik für Ingenieure Winter 2005/2006 Übungsblatt Nr. 3 Dr. Ekkart Kindler FG Softwaretechnik Institut für Informatik Übungsgruppenleiter: M.-R. Brojerdi H. Selke M. Meyer M.Tichy E. Münch
Matlab Selbstlernkurs
 Matlab Selbstlernkurs 6 4. 8. 6. 4. - -. -. 4 -. 6 -. 8. 6. 8-4 -. 8. 6.4. -. -. 4 -.6 -.8 - - -. -. 4 -. 6 -. 8.. 4-6 -6-4 - 4 6. Juli 8 Martín Chávez m.chavez@irt.rwth-aachen.de Gliederung Einführung
Matlab Selbstlernkurs 6 4. 8. 6. 4. - -. -. 4 -. 6 -. 8. 6. 8-4 -. 8. 6.4. -. -. 4 -.6 -.8 - - -. -. 4 -. 6 -. 8.. 4-6 -6-4 - 4 6. Juli 8 Martín Chávez m.chavez@irt.rwth-aachen.de Gliederung Einführung
MATLAB Sommersemester 2018 Dr. Ulf Mäder
 MATLAB Sommersemester 2018 Dr. Ulf Mäder Dr. Ulf Mäder - IMPS Folie 1 MATLAB - Befehle Allgemeine Form Zuweisungen Zwei Arten von Befehlen Anweisungen >> = Einfache Spezialform
MATLAB Sommersemester 2018 Dr. Ulf Mäder Dr. Ulf Mäder - IMPS Folie 1 MATLAB - Befehle Allgemeine Form Zuweisungen Zwei Arten von Befehlen Anweisungen >> = Einfache Spezialform
Regelungstechnik für Ingenieure
 Regelungstechnik für Ingenieure Analyse, Simulation und Entwurf von Regelkreisen Bearbeitet von Serge Zacher, Manfred Reuter 15., korrigierte Auflage 2017. Buch. XVIII, 515 S. Softcover ISBN 978 3 658
Regelungstechnik für Ingenieure Analyse, Simulation und Entwurf von Regelkreisen Bearbeitet von Serge Zacher, Manfred Reuter 15., korrigierte Auflage 2017. Buch. XVIII, 515 S. Softcover ISBN 978 3 658
Inhaltsverzeichnis AE SYSTEME. HJW REV
 Inhaltsverzeichnis Win CE MOBILE DATA Modul PACKLIST...2 Schritt 1: Datei PACKLIST.TXT erzeugen + übertragen...3 Datenformat Packlist - CSV / XLS mit Trennzeichen...3 Schritt 2: PACKLIST auf dem Mobilgerät
Inhaltsverzeichnis Win CE MOBILE DATA Modul PACKLIST...2 Schritt 1: Datei PACKLIST.TXT erzeugen + übertragen...3 Datenformat Packlist - CSV / XLS mit Trennzeichen...3 Schritt 2: PACKLIST auf dem Mobilgerät
Einsatz von CAS im Mathematikunterricht Klasse 8
 Einsatz von CAS im Mathematikunterricht Klasse 8 Beispiele für den Einsatz des Voyage 200 im Lernbereich 3 Funktionen und lineare Gleichungssysteme Darstellungsformen von Funktionen Eigenschaften ganz-
Einsatz von CAS im Mathematikunterricht Klasse 8 Beispiele für den Einsatz des Voyage 200 im Lernbereich 3 Funktionen und lineare Gleichungssysteme Darstellungsformen von Funktionen Eigenschaften ganz-
DepoTrend 0 INSTALLATION 1 DATEN SICHERN UND IMPORTIEREN 1.1 STARTEN DES PROGRAMMS 1.2 PROJEKTE ANLEGEN 1.3 IMPORTIEREN DER ROHDATEN
 DepoTrend Software zur Anzeige und Archivierung der DEPOSENS 3 Daten Version 2.3 Kurzanleitung 0 INSTALLATION Entpacken Sie die Datei DepoTrend.zip in ein Verzeichnis Ihrer Wahl. Nach dem Entpacken sollten
DepoTrend Software zur Anzeige und Archivierung der DEPOSENS 3 Daten Version 2.3 Kurzanleitung 0 INSTALLATION Entpacken Sie die Datei DepoTrend.zip in ein Verzeichnis Ihrer Wahl. Nach dem Entpacken sollten
Inhaltsverzeichnis... 1 Bestandteile einer Formel... 1 Die Funktion Summenprodukt... 4
 Inhaltsverzeichnis Inhaltsverzeichnis... 1 Bestandteile einer Formel... 1 Die Funktion SUMME... 2 Die Funktion AUTOSUMME... 2 Die Funktion SUMMEWENN... 2 Die Funktion SUMMEWENNS... 3 Die Funktion Summenprodukt...
Inhaltsverzeichnis Inhaltsverzeichnis... 1 Bestandteile einer Formel... 1 Die Funktion SUMME... 2 Die Funktion AUTOSUMME... 2 Die Funktion SUMMEWENN... 2 Die Funktion SUMMEWENNS... 3 Die Funktion Summenprodukt...
11. Berechnungen aus der Regelungstechnik
 1 11. Berechnungen aus der Regelungstechnik 11.1 P-Regler nullter, erster, zweiter oder höherer Ordnung Die Sprungantwort eines P-Reglers kann unterschiedlich ausfallen. Je nach Verlauf (Bild 11-1) spricht
1 11. Berechnungen aus der Regelungstechnik 11.1 P-Regler nullter, erster, zweiter oder höherer Ordnung Die Sprungantwort eines P-Reglers kann unterschiedlich ausfallen. Je nach Verlauf (Bild 11-1) spricht
Entwurf, Test und Analyse adaptiver Regelungsstrategien für einen nichtlinearen totzeitbehafteten technischen Prozess
 Fakultät Informatik Institut für angewandte Informatik- Professur Technische Informationssysteme Verteidigung der Diplomarbeit: Entwurf, Test und Analyse adaptiver Regelungsstrategien für einen nichtlinearen
Fakultät Informatik Institut für angewandte Informatik- Professur Technische Informationssysteme Verteidigung der Diplomarbeit: Entwurf, Test und Analyse adaptiver Regelungsstrategien für einen nichtlinearen
Einstieg in die Regelungstechnik
 Einstieg in die Regelungstechnik Hans-Werner Philippsen Vorgehensmodell für den praktischen Reglerentwurf ISBN 3-446-22377-0 Inhaltsverzeichnis Weitere Informationen oder Bestellungen unter http://www.hanser.de/3-446-22377-0
Einstieg in die Regelungstechnik Hans-Werner Philippsen Vorgehensmodell für den praktischen Reglerentwurf ISBN 3-446-22377-0 Inhaltsverzeichnis Weitere Informationen oder Bestellungen unter http://www.hanser.de/3-446-22377-0
Näherung von π. Aufgaben und gestufte Arbeitshilfen für die. mit OpenOffice CALC
 Studienseminar für Gymnasien in Kassel ALEXANDER KALLMEYER und MARTIN SCHULTE M10: Methoden und Medien Vortrag: Computer im Mathematikunterricht Aufgaben und gestufte Arbeitshilfen für die Näherung von
Studienseminar für Gymnasien in Kassel ALEXANDER KALLMEYER und MARTIN SCHULTE M10: Methoden und Medien Vortrag: Computer im Mathematikunterricht Aufgaben und gestufte Arbeitshilfen für die Näherung von
Prozessidentifikation mit Sprungantworten
 Fakultät Informatik, Institut für angewandte Informatik, Professur für technische Informationssysteme Hauptseminar Technische Informationssysteme Dresden, 27. April 2012 Überblick 1. Motivation und Begriffe
Fakultät Informatik, Institut für angewandte Informatik, Professur für technische Informationssysteme Hauptseminar Technische Informationssysteme Dresden, 27. April 2012 Überblick 1. Motivation und Begriffe
Query-Manager Kurzanleitung Inhalt. Query-Manager. Kurzanleitung
 Query-Manager Kurzanleitung Inhalt Query-Manager Kurzanleitung 1 Inhalt 1. Selektion über Sachdaten... 3 2. Einfache Abfrage... 3 2.1. Objektklasse und Tabelle auswählen... 3 2.2. Attributeigenschaften
Query-Manager Kurzanleitung Inhalt Query-Manager Kurzanleitung 1 Inhalt 1. Selektion über Sachdaten... 3 2. Einfache Abfrage... 3 2.1. Objektklasse und Tabelle auswählen... 3 2.2. Attributeigenschaften
Projekt 3 Variablen und Operatoren
 Projekt 3 Variablen und Operatoren Praktisch jedes Programm verarbeitet Daten. Um mit Daten programmieren zu können, muss es Möglichkeiten geben, die Daten in einem Programm zu verwalten und zu manipulieren.
Projekt 3 Variablen und Operatoren Praktisch jedes Programm verarbeitet Daten. Um mit Daten programmieren zu können, muss es Möglichkeiten geben, die Daten in einem Programm zu verwalten und zu manipulieren.
Regelungstechnik. Wirkungsweisen, Anwendungen und systemorientierte Grundlagen in anschaulicher Darstellung. Günter Roth
 Günter Roth Regelungstechnik Wirkungsweisen, Anwendungen und systemorientierte Grundlagen in anschaulicher Darstellung 2. völlig neu bearbeitete und erweiterte Auflage Hüthig Verlag Heidelberg Inhaltsverzeichnis
Günter Roth Regelungstechnik Wirkungsweisen, Anwendungen und systemorientierte Grundlagen in anschaulicher Darstellung 2. völlig neu bearbeitete und erweiterte Auflage Hüthig Verlag Heidelberg Inhaltsverzeichnis
Umwelt-Campus Birkenfeld Numerik. der Fachhochschule Trier. Prof. Dr.-Ing. T. Preußler. MATLAB-Simulink
 MATLAB- 1. Einführung in ist eine MATLAB-Toolbox zur Simulation Dynamischer Systeme mit Hilfe einer grafischen Benutzeroberfläche. Insbesondere eignet sich zur Behandlung linearer und nichtlinerarer zeitabhängiger
MATLAB- 1. Einführung in ist eine MATLAB-Toolbox zur Simulation Dynamischer Systeme mit Hilfe einer grafischen Benutzeroberfläche. Insbesondere eignet sich zur Behandlung linearer und nichtlinerarer zeitabhängiger
Inhaltsverzeichnis. Ulrich Stein. Programmieren mit MATLAB. Programmiersprache, Grafische Benutzeroberflächen, Anwendungen
 Inhaltsverzeichnis Ulrich Stein Programmieren mit MATLAB Programmiersprache, Grafische Benutzeroberflächen, Anwendungen ISBN (Buch): 978-3-446-43243-7 ISBN (E-Book): 978-3-446-43319-9 Weitere Informationen
Inhaltsverzeichnis Ulrich Stein Programmieren mit MATLAB Programmiersprache, Grafische Benutzeroberflächen, Anwendungen ISBN (Buch): 978-3-446-43243-7 ISBN (E-Book): 978-3-446-43319-9 Weitere Informationen
Soft Control (AT 3, RMA)
") Soft Control (AT 3, RMA) Zur 3. Übung Fuzzy Control Einfaches Fuzzy-Beispiel Titelmasterformat durch Klicken bearbeiten Prinzip eines Fuzzy Systems: 2 Einfaches Fuzzy-Beispiel Titelmasterformat durch Klicken
Soft Control (AT 3, RMA) Zur 3. Übung Fuzzy Control Einfaches Fuzzy-Beispiel Titelmasterformat durch Klicken bearbeiten Prinzip eines Fuzzy Systems: 2 Einfaches Fuzzy-Beispiel Titelmasterformat durch Klicken
- Analoge Regelung -
 Labor Mechatronik Versuch V1 - Analoge Regelung - 1. Zielstellung... 2 2. Theoretische Grundlagen... 2 3. Versuchsdurchführung... 4 3.1. Versuchsaufbau... 4 3.2. Aufgabenstellung und Versuchsdurchführung...
Labor Mechatronik Versuch V1 - Analoge Regelung - 1. Zielstellung... 2 2. Theoretische Grundlagen... 2 3. Versuchsdurchführung... 4 3.1. Versuchsaufbau... 4 3.2. Aufgabenstellung und Versuchsdurchführung...
Regelung einer Luft-Temperatur-Regelstrecke
 Technische Universität Berlin Fakultät IV Elektrotechnik und Informatik Fachgebiet Regelungssysteme Leitung: Prof. Dr.-Ing. Jörg Raisch Praktikum Grundlagen der Regelungstechnik Regelung einer Luft-Temperatur-Regelstrecke
Technische Universität Berlin Fakultät IV Elektrotechnik und Informatik Fachgebiet Regelungssysteme Leitung: Prof. Dr.-Ing. Jörg Raisch Praktikum Grundlagen der Regelungstechnik Regelung einer Luft-Temperatur-Regelstrecke
DAS EINSTEIGERSEMINAR
 DAS EINSTEIGERSEMINAR Microsoft Office Excel 2010 Gudrun Rehn-Göstenmeier LERNEN ÜBEN ANWENDEN Teil I: Lernen L1 Dateiorganisation Bevor wir uns mit den Excel-spezifischen Befehlen und Funktionen befassen
DAS EINSTEIGERSEMINAR Microsoft Office Excel 2010 Gudrun Rehn-Göstenmeier LERNEN ÜBEN ANWENDEN Teil I: Lernen L1 Dateiorganisation Bevor wir uns mit den Excel-spezifischen Befehlen und Funktionen befassen