Neues Thema: Inversion am Kreis (Kreisspiegelung)
|
|
|
- Arthur Giese
- vor 9 Jahren
- Abrufe
Transkript
1 Neues Thema: Inversion am Kreis (Kreisspiegelung) Wir arbeiten in ( R 2,, standard ). Def. Betrachte einen Kreis um O vom Radius r > 0. Inversion (bzgl. des Kreises) ist eine Abbildung I O,r : R 2 \ {O} R 2 \ {O}, die Punkt X auf den Punkt Y abbildet, s.d. OY = O Bemerkung OY = X Y r2 OX OX. 2 Koordinatendarstellung: Für O = x 0 y 0, X = x y. Dann ist Y = O + OY = x 0 r y x x 0 (x x 0) 2 +(y y 0) y y 0 r2 OX OX = r2 2 OX. Also, OY OX = r2

2 Geometrische Beschreibung der Lage von Y : O, X, Y liegen auf einem Strahl mit Anfangspunkt O. OY OX = r 2 Bemerkung Inversion ist eine Bijektion (als Abbildung des R 2 \ {O} auf sich selbst. )


3
4 Einfachste Eigenschaften und komplexe Zahlen Einfachste Eigenschaften: 1. Liegt X auf dem Kreis um O vom Radius r, so ist I O,r (X) = X. 2. I ist eine Involution: I I = Id. 3. I bildet innere Punkte des Kreises auf äussere ab und umgekehrt. 4. I kommutiert mit Isometrien: Ist F : R 2 R 2 eine Isometrie, so ist I F(O),r (F(X)) = F (I O,r (X)) Falls O = 0 0 ist, und r = 1, so ist die Inversion gegeben durch I x y = 1 x 2 +y 2 x y. Falls wir z = x + i y setzen, wird die Inversion wie folgt gegeben: I(z) = z 1 z, wobei z die komplexe Konjugation ist (da := z 2 1 Ana I z = x i y x+i y und deswegen x 2 +y 1 z =. ) 2 x 2 +y 2 Man bedenke auch, dass die Konjugation, also die Abbildung z = x + iy z = x iy die Spiegelung bzgl. der Geraden L 0, 1 ist. 0
 = z 1 z, wobei z die komplexe Konjugation ist (da := z 2 1 Ana I z = x i y x+i y und deswegen x 2 +y 1 z =.")
5 Inversion als Bijektion von R 2 Betrachte verallgemeinerte Ebene R 2 := R 2 definiere die Inversion I : R 2 R 2 wie folgt: Y s.d. OY = r2 OX 2 OX für X O, I(X) = falls X = O O falls X = }{{}. Dann ein formaler Punkt Inversion ist eine bijektive Abbildung der verallgemeinerten Ebene auf sich selbst. Frage Warum die Bezeichnung? Antwort: Wir brauchen einen künstlichen Punkt, um I(O) zu definieren. Je näher X an O ist, je weiter ist I(X) von O entfernt. (Weil OY = r 2 OX ). Man kann sich I(O) als unendlichen Punkt vorstellen, daher die Bezeichnung.
 zu definieren. Je näher X an O ist, je weiter ist I(X) von O entfernt.")
6 Def. Ein verallgemeinerter Kreis ist ein Kreis (vom Radius > 0), oder die Vereinigung G } {{ }, wobei G eine Gerade ist. verallgemeinerte Gerade Lemma 19. Inversion bildet verallgemeinerte Kreise auf verallgemeinerte Kreise ab. Ferner gilt: Inversion IO,r überführt alle verallgemeinerten Geraden, die O enthalten, in sich selbst, und andere verallgemeinerte Geraden in Kreise, die O enthalten. Inversion überführt die Kreise, die O enthalten, in verallgemeinerte Geraden, und andere Kreise in Kreise.

7 ßÞÐ Def. Ein verallgemeinerter Kreis ist ein Kreis (vom Radius > 0), oder die Vereinigung G, verallgemeinerte Gerade wobei G eine Gerade ist. Lemma 19. Inversion bildet verallgemeinerte Kreise auf verallgemeinerte Kreise ab. Ferner gilt: Inversion IO,r überführt alle verallgemeinerten Geraden, die O enthalten, in sich selbst, und andere verallgemeinerte Geraden in Kreise, die O enthalten. Inversion überführt die Kreise, die O enthalten, in verallgemeinerte Geraden, und andere Kreise in Kreise. Beweis Betrachten eine Inversion I O,r und einen Kreis K. Da Inversion mit Isometrien kommutiert, genügt es die Aussage des Lemmas für I F(O),r und den Kreis Bild F (K) zu beweisen, wobei F eine Isometrie ist. Nach Isometrie O O

8 Also sei O = 0 0 (und deswegen ist I x y = r2 2 x x 2 +y y,) und der zu untersuchende Kreis sei K := { x y s.d.(x x c ) 2 + y 2 R 2 = 0}. Da I I = Id, besteht Bild I (K) aus allen Punkten, die auf Punkte von K abgebildet werden, also aus allen Lösungen der Gleichung ( ) 2 ( 2 r 2 x 2 +y x x 2 c + r 2 x 2 +y y) R 2 = 0. Multiplizieren mit (x 2 + y 2 ) 2 ergibt (x 2 + y 2 )(R 2 xc 2 ) } {{ } (x y) R 2 xc 2 c x R 2 x 2 y +2r 2 x } {{ } c x = r 4 ( ) a 1 Ist R 2 xc 2, so hat R 2 xc 2 gleiche Eigenwerte, und ist ( ) R 2 xc zwei 2 die Gleichung eines Kreises. ( und Punkt sind ausgeschlossen, weil K mehr als einen Punkt hat.) Ist R 2 = xc 2, was bedeutet, das K durch O geht, O so ist ( ) 2x c x = r 2, und dies ist die Gleichung der Gerade. Beweis für die Geraden, die durch O gehen ist ähnlich.

9 Glatte Kurven und deren Tangenten Def. Eine (glatte ebene) Kurve ist das Bild einer Abbildung C : [α,β] R 2, d.h., C(t) = C 1 C 2 (t) wobei C 1,C 2 stetig differenzierbar sind, und (C 1 )2 + (C 2 )2 > 0. Physikalisch kann man eine Kurve als die Bahn eines Teilchens verstehen. Bsp. Strecke C u t C 2 (t) = x y 0 + v t, t [α,β], ist eine Kurve. Bsp. Kreis ist eine Kurve. Z.B. C 1 C 2 (t) = cos(t) sin(t), t [0,2π], ist die Abbildung deren Bild der Kreis mit der Gleichung x 2 + y 2 = 1 ist. Bsp. Ellipse ist eine Kurve. Z.B. C 1 λ C 2 (t) =¼cos(t) µ½, sin(t) t [0,2π], ist die Abbildung, deren Bild die Ellipse mit der Gleichung λx 2 + µy 2 = 1 ist.
![Bsp. Strecke C 1 0 + u t C 2 (t) = x y 0 + v t, t [α,β], ist eine Kurve. Bsp. Kreis ist eine Kurve. Z.B. C 1 C 2 (t) = cos(t) sin(t), t [0,2π], ist die Abbildung deren Bild der Kreis mit der Gleichung x 2 + y 2 = 1 ist.](/docs-images/40/125824/images/page_9.jpg "Bsp. Ellipse ist eine Kurve. Z.B. C 1 λ C 2 (t) =¼cos(t) µ½, sin(t) t [0,2π], ist die Abbildung, deren Bild die Ellipse mit der Gleichung λx 2 + µy 2 = 1 ist.")
10 Sei C : [α,β] R 2, ( C(t) = C 1 (t) C 2 (t) ) eine Kurve. Was ist deren Tangente im Punkt P = C(t 0 )? Geometrische Definition: Nehme die Folge von Sekanten (=Geraden die durch C(t 0 ) und C(t i ) gehen,) wobei t i t 0. Dann heißt deren Grenzwert die Tangente. (Jede Gerade ist gegeben durch eine Gleichung der Form ax + by + c = 0, wobei ( ) a 2 + b 2 = 1 (Hessische Normalform). OBdA ist c 0, also können wir die Gleichung so wählen, dass ( ) c > 0. Die Bedingungen ( ), ( ) bestimmen die Gleichung einer gegebenen Geraden eindeutig. Also bekommen wir die Folgen a i, b i, c i. Die Folgen konvergieren, siehe Beweis von Lemma 20. Seien ā, b, c die Grenzwerte. Dann ist die Gerade mit der Gleichung āx + by + c = 0 die Tangente. ) Analytische Definition: Die Tangente einer Kurve C(t) = C 1 (t) C 2 (t) in t 0 ist { } die Gerade C(t 0 ) + C 1 (t wobei s R. C 2 0) s (t Lemma 20. Die analytische und geometrische Definition stimmen überein.
, ( ) bestimmen die Gleichung einer gegebenen Geraden eindeutig. Also bekommen wir die Folgen a i, b i, c i. Die Folgen konvergieren, siehe Beweis von Lemma 20.")
11 Beweis OBdA ist t 0 = 0. Betrachte die Taylor-Reihe von C 1 (t), C 2 (t) im Punkt t = 0: C 1 (t) = C 1 (0) + C 1 (0)t + Rest 1(t) C 2 (t) = C 2 (0) + C 2 (0)t + Rest 2(t), Rest wobei lim 1(t) Rest t 0 t = lim 2(t) t 0 t = 0. Dann ist die Gleichung der Sekantedurch C(0), C(t) gleich (LAAG1, Vorl. 25) det C 1 (0) x C 2 (0) y C 1 (0) C 1 (t) C 2 (0) C 2 (t) =0 C ßÞ Ð 1 ßÞ Ð (0) x C 2 (0) y C 1 (0) (C 1 (0) + C 1 (0)t + Rest 1(t)) C 2 (0) (C 2 (0) + C 2 (0)t + Rest 2(t)) =0 det C 1 (0) x C 2 (0) y C 1 (0) + 1 t Rest 1(t) C 2 (0) + 1 t Rest 2(t) =0 x (C 2 (0) + 1 t Rest(t)) y (C 1 (0) + 1 t Rest(t)) = det ßÞ C 1 (0) C 2 (0) C 1 (0) + 1 t Rest 1(t) C 2 (0) + 1 t 2(t) (0) Ð Rest a(t) b(t) OBdA ist Vorzeichen von c(t) konstant in der nähe von 0 Da die Normalisierung a a, b b, c c a 2 +b 2 a 2 +b 2 a 2 +b a bzgl. a,b,c, ist der Grenzwert von, b und a 2 +b 2 a 2 +b 2 Wert in t = 0, und damit gleich C x 2 ÕC (0) 1 (0)2 +C 2 y C 1 ÕC (0) (0)2 1 (0)2 +C 2 = 1 ÕC det C 1 (0) C 2 (0)2 1 (0)2 +C 2 (0)2 C 1 (0) C 2 stetig ist 2 c a gleich dem 2 +b2 Also ( ist) der Richtungsvektor der Grenzwertgeraden (proportional zu) C 1 (0) C 2 (0), und die Gerade geht durch C(0). Damit ist die Gerade wie in der analytischen Definition.
 det C 1 (0) x C 2 (0) y C 1 (0) C 1 (t) C 2 (0) C 2 (t) =0 C ßÞ Ð 1 ßÞ Ð (0) x C 2 (0) y C 1 (0) (C 1 (0) + C 1 (0)t + Rest 1(t)) C 2 (0) (C 2 (0) + C 2 (0)t + Rest 2(t)) =0 det C 1 (0) x C 2 (0)")
12 Winkeltreuesatz Bsp. Tangente an Kreis { cos(t) sin(t), t [0,2π]} in t 0 ist } die Gerade { cos(t 0 ) sin(t 0 ) sin(t 0 ) + cos(t 0 ) s, wobei s R. Def. Seien C(t) und C(t) zwei Kurven, die einander im Punkt P = C(t 0 ) = C( t alpha 0 ) schneiden. Der Winkel zwischen den Kurven im Schnittpunkt, ist der Winkel (alpha [0, π 2 ]) zwischen deren Tangenten im Schnittpunkt. Ist der Winkel = 0, so berühren die Kurven einander Satz. Seien C(t),C(t) glatte ebene Kurven, die im Punkt P O einander schneiden. Dann gilt: Der Winkel zwischen C und C im Punkt P ist gleich dem Winkel zwischen I O,r (C(t)), I O,r (C(t)) im Punkt I O,r (P). In Worten: Inversion ist winkeltreu.
![Der Winkel zwischen den Kurven im Schnittpunkt, ist der Winkel (alpha [0, π 2 ]) zwischen deren Tangenten im Schnittpunkt.](/docs-images/40/125824/images/page_12.jpg "Ist der Winkel = 0, so berühren die Kurven einander Satz. Seien C(t),C(t) glatte ebene Kurven, die im Punkt P O einander schneiden.")

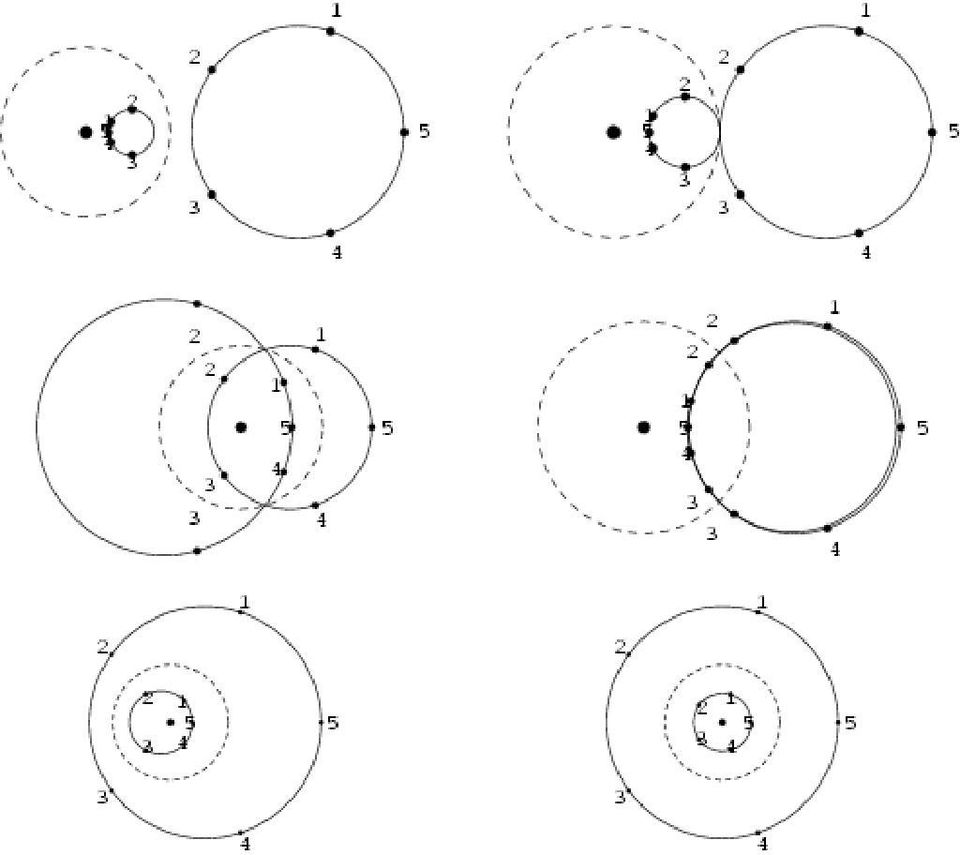
13 Diese Information genügt oft, qualitative Bilder zu machen. Z.B.

14 Beweis OBdA ist r = 1 und O = 0 0. Dann ist I x y = 1 deswegen I ( C 1 C 2 (t) ) von I(C(t)) gleich ( d dt 1 2 C 1 C 1(t) 2 +C 2(t) C 2 (t) ) x 2 +y 2 x y, und = 1 C 1(t) 2 +C 2(t) 2 C 1 (t) C 2 (t). Dann ist der Richtungvektor =¼ C 1 2 C 2 (t) 2 C 1 (t) 2 2C 1 (t)c 2 (t) 2 C (C 1(t) 2 +C 2(t) 2 ) 2C 1 (t)c 2 (t) C 1 (t) 2 C 2 (t) 1 (t) C 1 (t) 2 +C 2 (t) 2 2C 1(t) C 1 (t)c 1 (t)+c 2 (t)c 2 (t) (C 1 (t) 2 +C 2 (t) 2 ) 2 2½ = C 2 (t) C 1 (t) 2 +C 2 (t) 2 2C 2(t) C 1 (t)c 1 (t)+c 2 (t)c 2 (t) (C 1 (t) 2 +C 2 (t) 2 ) ( 1 α β (t) (t) = 1 C 2 γ β α ) C 1 (t) C 2 (t), wobei α,β,γ nur von C(t) abhängen. Also werden wir ( für die Kurve C, s.d. C(t) = C(t), die Formel d α β ) C dt I(C(t) = 1 1 γ β α (t) mit denselben α,β,γ haben. C 2 ( ) α β Wir wissen aber, dass 1 γ zu einer orthogonalen Matrix β α ( ) α β proportional ist. Also ist v 1 γ v eine Verkettung von einer β α orthogonalen Abbildung und einer Streckung. ( Dann ist) der Winkel α β zwischen u,v gleich dem Winkel zwischen 1 γ v, β α ( ) 1 α β γ u, also ist der Winkel zwischen C β α (t),c (t) gleich dem Winkel zwischen (I(C(t))), (I(C(t))).
 = C(t), die Formel d α β ) C dt I(C(t) = 1 1 γ β α (t) mit denselben α,β,γ haben.")
15 Diese Information genügt oft, schulgeometrische Aufgaben zu lösen Aufgabe Der Kreis S berührt S 1 und S 2. Man beweise: Die folgenden 3 Geraden 1. durch Berührungspunkte. 2. durch Mittelpunkte von S 1 und S die Gerade, die beide Kreise berührt haben einen gemeinsamen Schnittpunkt.

16 HA: Winkel zwischen Kreis und Gerade fallen in beiden Schnittpunkten zusammen. B C A Beweis: ACB ist gleichschenklig, und deswegen CAB = CBA. Da CAO = CBO = π 2, gilt BAO = ABO. Folgerung Betrachte ein O auf der Geraden und eine Inversion, die A in B und B in A B A überführt (d.h. AO BO = r 2 O ). Dann führt sie den Kreis in sich selbst über. Beweis. Die Gerade enthält O und wird deswegen auf sich selbst abgebildet. Der Kreis wird auf einen Kreis abgebildet (Lemma 19). Da der Kreis die Punkte A und B enthält, und da A auf B, B auf A abgebildet wird, wird das Bild des Kreises die Punkte A und B enthalten. Da Inversion winkeltreu ist, erhält sie Winkel zwischen Bild des Kreises und der Geraden, also wird der Kreis auf sich selbst abgebildet.

17 S2 A B S 1 O Lösung der Aufgabe Betrachte die Gerade durch Berührungspunkte, und die Gerade durch Mittelpunkte von S 1 und S 2. Sei O deren Schnittpunkt. Nehme die Inversion mit Zentrum in O, die A in B und B in A überführt (r = OA OB ). Nach HA wird Kreis auf sich selbst abgebildet. Dann wird S 1 auf einen Kreis abgebildet, der Kreis in A berührt. Aber da Gerade auf sich selbst abgebildet wird, und da sie durch Mittelpunkt des Kreises S 1 geht (s.d. Winkel zwischen S 1 und Gerade gleich π/2 ist), muss nach Winkeltreuesatz die Gerade durch Bild des Kreises S 1 gehen. Also ist das Bild von S 1 gleich S 2. Ähnlich zeigt man, dass das Bild von S 2 der Kreis S 1 ist. S2 S 1 O Dann wird die Gerade durch O, die S 1 berührt, auf sich selbst abgebildet (Lemma 19) S 2 berühren (Winkeltreuesatz) Also haben alle 3 Geraden durch Berührungspunkte, durch Mittelpunkte von S 1 und S 2, die Gerade, die beide Kreise berührt, einen gemeinsamen Schnittpunkt O.

18 C O B A Aufgabe Betrachte die geschlossene Kette aus 4 Kreisen: S 1 berührt S 2, S 2 berührt S 3, S 3 berührt S 4, und S 4 berührt S 1. Man zeige: die Berührungspunkte der Kreise liegen auf einem Kreis. Beweis. Betrachte die Inversion mit Zentrum in O. Nach der Inversion werden die Kreise wie rechts aussehen. Der Kreis durch OCA wird in eine Gerade durch C und A überführt. Man zeige: die Gerade enthält B. C B A P alpha C B A N alpha Wir betrachten die gemeinsame Tangente in B. Es gilt: CPB = ANB = alpha. Nach HA ist BAN = ABN. Da alpha + BAN = ABN = π, ist ABN = π alpha 2. Ähnlich, ist CBP = π alpha 2. Also ist CBP = ABN,und die Segmente CB und BA liegen auf einer Geraden.

19 Kreise, die zum Inversionskreis orthogonal sind Folgerung A Betrachte einen Kreis, der zum Kreis mit Zentrum in O und Radius r orthogonal ist. Dann gilt: die Inversion I O,r bildet den Kreis auf sich selbst ab. O A B I(A) O Beweis. Die Tangenten zum Kreis sind in den Schnittpunkten orthogonal zu den Tangenten des Inversionskreises, und gehen deswegen durch O.Der Kreis, dessen Tangenten OA und OB, und die Punkte A und B haben die folgenden Eigenschaften: = A, I(B) = B Bild I (OA) = (OA) Bild I (OB) = (OB) Kreis berührt OA in A und OB in B. Dann berührt das Bild des Kreises OA in A und OB in B, und deswegen fällt es mit dem Kreis zusammen.
 = B Bild I (OA) = (OA) Bild I (OB) = (OB) Kreis")
20 Sekantensatz Folgerung B (Sekantensatz) OB OC = OA 2 O B A C Beweis Betrachte den Kreis mit Mittelpunkt O und Radius r = OA. O B A C Er ist orthogonal zum Kreis. Dann bildet I O,r den Kreis auf sich ab. Da I O,r die Gerade erhält, ist I O,r (B) = C. Dann ist OB OC = r 2 = OA 2. Folgerung C Jeder Kreis, der durch A und I O,r (A) geht, ist zum Kreis um O vom Radius r orthogonal.

21 Warum heißt Inversion auch Kreisspiegelung? Folgerung D Alle Kreise, die zum Kreis um O vom Radius r orthogonal sindund Punkt A enthalten (angenommen, A liegt nicht auf dem Kreis um O vom Radius r), haben genau 2 gemeinsame Schnittpunkte (z.b. A und B). Ferner gilt: I O,r (A) = B und I O,r (B) = A. O O A B A B Bemerkung Betrachte die Spiegelung S bzgl. einer Geraden G. Dann sind alle Kreise, die durch A G und B := S(A) gehen, zur Geraden orthogonal. Bemerkung Inversion von O vom Bild oben gibt das Bild links.
22 Frage Was macht eine Inversion mit dem Abstand zwischen Punkten? Lemma 21 Sei A,B R 2 \ O.Dann gilt: I O,r (A)I O,r (B) = AB r 2 O I(A) B A OA OB. Beweis. Die Dreiecke OAB und O I(A)I(B) sind ähnlich, weil Winkel O gleich ist, und, weil OA OI(A) = OA OA OB = OI(B) OI(A) OI(B) = r 2. Dann AB I(A)I(B) = OA OI(B). Dann I(B) I(A)I(B) = AB OI(B) OA OB OI(B) =r = 2 r AB 2 OB OA, Def. Doppelverhältnis (A, B; C, D) ist die Zahl AC BC : AD BD = AC BD BC AD. ( ) Lemma 22 (A,B;C,D) = (I(A),I(B);I(C),I(D)) (falls es definiert ist) (In Worten: Inversion erhält das Doppelverhältnis.) Beweis. Nach Lemma 21 ist r 2 I O,r (A)I O,r (C) = AC OA OC, I r 2 O,r(B)I O,r (C) = BC OB OC r 2 I O,r (A)I O,r (D) = AD OA OD, I r 2 O,r(B)I O,r (D) = BD OB OD. Einsetzen in ( ) ergibt die Aussage.
 + (D,C;A,B) und das AC BD ändert sich nicht nach einer Inversion (Lemma 22). Nach geeigneter Inversion (s.")
23 Satz von Ptolemäus B A C D Satz von Ptolemäus. Ecken eines Vierecks ABCD liegen auf einem Kreis. Dann gilt: AC BD = AB CD + AD BC. Beweis.Z.z.: 1 = AB CD + AD BC. Aber AC BD AB CD + AD BC = AB CD AC BD AC BD + AD BC = (A,D;B,C) + (D,C;A,B) und das AC BD ändert sich nicht nach einer Inversion (Lemma 22). Nach geeigneter Inversion (s. Bild) wird das Bild wie folgt verändert: B C Nach Inversion I I(B) I(D) A D I(A) a b c I(C) O Man bezeichne I(A)I(B) = a, I(B)I(C) = b, I(C)I(D) = c. Dann ist I(A)I(C) = a + b, I(B)I(D) = b + c, I(A)I(D) = a + b + c. Es folgt I(A)I(B) I(C)I(D) + I(A)I(D) I(B)I(C) I(A)I(C) I(B)I(D) = ac+(a+b+c)b (a+b)(b+c) = ac+ab+b2 +bc ab+b 2 +ac+bc = 1,
24 Kreistreu Transformationen. Def. Wir sagen, dass eine bijektive Abbildung F : R 2 R 2 ist Kreistreu, wenn für jeden verallg. Kreis K gilt: das Bild F(K) ist auch ein verallg. Kreis. Konvention. Wir werden die Isometrien und Ähnlichkeitstransformations als Abbildungen von R 2 R 2 wie folgt verstehen: für jede Isometrie oder Ähnlichkeitstransformation F wir erweitern den Definitionsbereich bis R 2 = R 2 { }: wir setzen F( ) =.
25 Jede Kreistreu Transformation ist eine Ähnlichkeitstransformation, oder die Verkettung einer Inversion und einer Isometrie. Def. Wir sagen, dass eine bijektive Abbildung F : R 2 R 2 ist Kreistreu, wenn für jeden verallg. Kreis K gilt: das bild F(K) ist auch ein verallg. Kreis.Konvention. Wir werden die Isometrien und Ähnlichkeitstransformations als Abbildungen von R 2 R 2 wie folgt verstehen: für jede Isometrie oder Ähnlichkeitstransformation F wir erweitern den Definitionsbereich bis R 2 = R 2 { }: wir setzen F( ) =. Bsp. Jede Isometrie und jede Ähnlichkeittransformation ist kreistreu: sie sind bijektiv auf R 2 und deswegen auch auf R 2. Sie bilden Kreise Kreise, Geraden Geraden, also veralg. Kreise auf veralg Kreise. Bsp. Inversion ist auch kreistreu (Lemma 19). Bsp. Verkettungen von Ähnlichkeittransformationen und Isometrien sind kreistreu: sie sind bijektiv als Verkettungen von bijektiven Abbildungen. Offensichtlich, wenn F 1 und F 2 kreistreu sind, ist auch F 1 F 2 kreistreu: in der Tat, für einen veralg. Kreis K haben wir dass F 1 F 2 (K) = F 1 (F 2 (K)) ein veralg. Kreis ist, weil F 2 (K) ein veralg. Kreis ist. Satz. Eine kreistreu Abbildung F : R 2 R 2 ist eine Ähnlichkeittransformation oder die Verkettung von einer Inversion und einer Isometrie.
26 Beweis. Sei F : R 2 R 2 eine kreistreu Abbildung. Fall 1. F( ) =. Dann gilt: Bild von jede Gerade ist Gerade. Also, die Abbildung F beschränkt auf R 2 = R 2 \ { } ist dann eine geradentreu Abbildung, also eine Kollinearität (siehe matveev/lehre/la10/vorlesung9.pdf) Dann ist die eine bijektive affine Abbildung nach Fundamentalsatz der reellen affinen Geometrie, siehe Satz 17 aus matveev/lehre/la10/vorlesung9.pdf, also hat das Aussehen F(x) = Ax + b. Wenn A nicht zu einer Orthogonalmatrix proportional ist, ist Bild des Einheitkreises kein Kreis. Also, F (beschränkt auf R 2 ) hat das Aussehen F(x) = k Ox + b für eine Orhtogonalmatrix O; dann ist sie eine Ähnlichkeitsabbildung.
27 Fall 2. F( ) = Z. Wir betrachten dann eine Inversion I Z,r mit Zentrum Z und Radius r. Radius r können wir zuerst beliebig wählen, später werden wir aber den Radius r eichen. Die Abbildung I Z,r F ist eine kreistreu bijektive Abbildung und erfüllt die Bedingung F( ) =. Dann ist sie I Z,r F eine Ähnlichkeitsabbildung, wie wir es oben in Fall 1 bewiesen haben, also ist I Z,r F(x) = k Ox + b.
28 Man merke jetzt, dass die zwei Inversionen mit einem Zentrum und verschieden Radien I Z,r und I Z,R unterscheiden sich durch eine zentrische Streckung mit Koeffizient R 2 /r 2 : z.b. direkt ausrechnen: die Formel für I Z,r und I Z,R sind I Z,r (X) = Z + r2 ZX, IZ,R XZ 2 (X) = Z + R2 ZX. XZ 2 Die Formel für die Streckung mit dem Koeffizient k und Zentrum Z ist Dann gilt für k = R 2 /r 2 : S Z,k (X) = Z + k(x Z). ) S Z,k I Z,r (X) = Z + k (Z + r2 ZX Z XZ 2 = Z + R2 ZX = IZ,R XZ 2. Dann aus I Z,r F(x) = k Ox + b bekommen wir I Z,R F(x) = Ox + 1 k b, wobei R so gewählt ist dass k = R 2 /r 2. Wir wenden die Inversion I Z,R auf beiden Seiten der letzten Gleichung und bekommen F(x) = I Z,R (Ox + 1 k b),
29 Verkettung von Inversionen Folgerung. Verkettung von Isometrien und Ähnlichkeitabbildungen (in beliebiger Reihenfolge) ist eine Ähnlichkeitsabbildung oder eine Verkettung von Inversion und Isometrie. Beweis. Die Verkettung von Isometries und Ähnlichkeitabbildungen ist eine kreistreu Abbildung und daher eine Ähnlichkeittransformation oder die Verkettung von einer Inversion und einer Isometrie.
Abituraufgabe zur analytischen Geometrie, Hessen 2013, B2, Grundkurs (TR)
") Abituraufgabe zur analytischen Geometrie, Hessen 2013, B2, Grundkurs (TR) 1 Bei Ausgrabungen wurden die Überreste einer 4500 Jahre alten Pyramide entdeckt. Die Abbildung zeigt die Ansicht der Pyramidenruine
Abituraufgabe zur analytischen Geometrie, Hessen 2013, B2, Grundkurs (TR) 1 Bei Ausgrabungen wurden die Überreste einer 4500 Jahre alten Pyramide entdeckt. Die Abbildung zeigt die Ansicht der Pyramidenruine
Division Für diesen Abschnitt setzen wir voraus, dass der Koeffizientenring ein Körper ist. Betrachte das Schema
 Division Für diesen Abschnitt setzen wir voraus, dass der Koeffizientenring ein Körper ist. Betrachte das Schema 2x 4 + x 3 + x + 3 div x 2 + x 1 = 2x 2 x + 3 (2x 4 + 2x 3 2x 2 ) x 3 + 2x 2 + x + 3 ( x
Division Für diesen Abschnitt setzen wir voraus, dass der Koeffizientenring ein Körper ist. Betrachte das Schema 2x 4 + x 3 + x + 3 div x 2 + x 1 = 2x 2 x + 3 (2x 4 + 2x 3 2x 2 ) x 3 + 2x 2 + x + 3 ( x
a' c' Aufgabe: Spiegelung an den Dreiecksseiten und Anti-Steinersche Punkte Darij Grinberg
 ufgabe: Spiegelung an den Dreiecksseiten und nti-steinersche Punkte Darij Grinberg Eine durch den Höhenschnittpunkt H eines Dreiecks B gehende Gerade g werde an den Dreiecksseiten B; und B gespiegelt;
ufgabe: Spiegelung an den Dreiecksseiten und nti-steinersche Punkte Darij Grinberg Eine durch den Höhenschnittpunkt H eines Dreiecks B gehende Gerade g werde an den Dreiecksseiten B; und B gespiegelt;
Zeichen bei Zahlen entschlüsseln
 Zeichen bei Zahlen entschlüsseln In diesem Kapitel... Verwendung des Zahlenstrahls Absolut richtige Bestimmung von absoluten Werten Operationen bei Zahlen mit Vorzeichen: Addieren, Subtrahieren, Multiplizieren
Zeichen bei Zahlen entschlüsseln In diesem Kapitel... Verwendung des Zahlenstrahls Absolut richtige Bestimmung von absoluten Werten Operationen bei Zahlen mit Vorzeichen: Addieren, Subtrahieren, Multiplizieren
Musterlösungen zur Linearen Algebra II Blatt 5
 Musterlösungen zur Linearen Algebra II Blatt 5 Aufgabe. Man betrachte die Matrix A := über dem Körper R und über dem Körper F und bestimme jeweils die Jordan- Normalform. Beweis. Das charakteristische
Musterlösungen zur Linearen Algebra II Blatt 5 Aufgabe. Man betrachte die Matrix A := über dem Körper R und über dem Körper F und bestimme jeweils die Jordan- Normalform. Beweis. Das charakteristische
7 Rechnen mit Polynomen
 7 Rechnen mit Polynomen Zu Polynomfunktionen Satz. Zwei Polynomfunktionen und f : R R, x a n x n + a n 1 x n 1 + a 1 x + a 0 g : R R, x b n x n + b n 1 x n 1 + b 1 x + b 0 sind genau dann gleich, wenn
7 Rechnen mit Polynomen Zu Polynomfunktionen Satz. Zwei Polynomfunktionen und f : R R, x a n x n + a n 1 x n 1 + a 1 x + a 0 g : R R, x b n x n + b n 1 x n 1 + b 1 x + b 0 sind genau dann gleich, wenn
50. Mathematik-Olympiade 2. Stufe (Regionalrunde) Klasse 11 13. 501322 Lösung 10 Punkte
 Klasse 11 13. 501322 Lösung 10 Punkte") 50. Mathematik-Olympiade. Stufe (Regionalrunde) Klasse 3 Lösungen c 00 Aufgabenausschuss des Mathematik-Olympiaden e.v. www.mathematik-olympiaden.de. Alle Rechte vorbehalten. 503 Lösung 0 Punkte Es seien
50. Mathematik-Olympiade. Stufe (Regionalrunde) Klasse 3 Lösungen c 00 Aufgabenausschuss des Mathematik-Olympiaden e.v. www.mathematik-olympiaden.de. Alle Rechte vorbehalten. 503 Lösung 0 Punkte Es seien
x 2 2x + = 3 + Es gibt genau ein x R mit ax + b = 0, denn es gilt
 - 17 - Die Frage ist hier also: Für welche x R gilt x = x + 1? Das ist eine quadratische Gleichung für x. Es gilt x = x + 1 x x 3 = 0, und man kann quadratische Ergänzung machen:... ( ) ( ) x x + = 3 +
- 17 - Die Frage ist hier also: Für welche x R gilt x = x + 1? Das ist eine quadratische Gleichung für x. Es gilt x = x + 1 x x 3 = 0, und man kann quadratische Ergänzung machen:... ( ) ( ) x x + = 3 +
Matrizennorm. Definition 1. Sei A M r,s (R). Dann heißt A := sup die Matrixnorm. Wir wissen zunächst nicht, ob A eine reelle Zahl ist.
. Dann heißt A := sup die Matrixnorm. Wir wissen zunächst nicht, ob A eine reelle Zahl ist.") Matrizennorm Es seien r,s N Mit M r,s (R bezeichnen wir die Menge der reellen r s- Matrizen (also der linearen Abbildungen R s R r, und setze M s (R := M s,s (R (also die Menge der linearen Abbildungen
Matrizennorm Es seien r,s N Mit M r,s (R bezeichnen wir die Menge der reellen r s- Matrizen (also der linearen Abbildungen R s R r, und setze M s (R := M s,s (R (also die Menge der linearen Abbildungen
Mathematischer Vorbereitungskurs für Ökonomen
 Mathematischer Vorbereitungskurs für Ökonomen Dr. Thomas Zehrt Wirtschaftswissenschaftliches Zentrum Universität Basel Gleichungen Inhalt: 1. Grundlegendes 2. Lineare Gleichungen 3. Gleichungen mit Brüchen
Mathematischer Vorbereitungskurs für Ökonomen Dr. Thomas Zehrt Wirtschaftswissenschaftliches Zentrum Universität Basel Gleichungen Inhalt: 1. Grundlegendes 2. Lineare Gleichungen 3. Gleichungen mit Brüchen
3.3 Eigenwerte und Eigenräume, Diagonalisierung
 3.3 Eigenwerte und Eigenräume, Diagonalisierung Definition und Lemma 3.3.1. Sei V ein K-Vektorraum, φ End K (V ), λ K. Wir defnieren den zu λ gehörigen Eigenraum von φ als Dies ist ein Unterraum von V.
3.3 Eigenwerte und Eigenräume, Diagonalisierung Definition und Lemma 3.3.1. Sei V ein K-Vektorraum, φ End K (V ), λ K. Wir defnieren den zu λ gehörigen Eigenraum von φ als Dies ist ein Unterraum von V.
Einführung in die Algebra
 Prof. Dr. H. Brenner Osnabrück SS 2009 Einführung in die Algebra Vorlesung 13 Einheiten Definition 13.1. Ein Element u in einem Ring R heißt Einheit, wenn es ein Element v R gibt mit uv = vu = 1. DasElementv
Prof. Dr. H. Brenner Osnabrück SS 2009 Einführung in die Algebra Vorlesung 13 Einheiten Definition 13.1. Ein Element u in einem Ring R heißt Einheit, wenn es ein Element v R gibt mit uv = vu = 1. DasElementv
3.2 Spiegelungen an zwei Spiegeln
 3 Die Theorie des Spiegelbuches 45 sehen, wenn die Person uns direkt gegenüber steht. Denn dann hat sie eine Drehung um die senkrechte Achse gemacht und dabei links und rechts vertauscht. 3.2 Spiegelungen
3 Die Theorie des Spiegelbuches 45 sehen, wenn die Person uns direkt gegenüber steht. Denn dann hat sie eine Drehung um die senkrechte Achse gemacht und dabei links und rechts vertauscht. 3.2 Spiegelungen
Abschlussprüfung Realschule Bayern II / III: 2009 Haupttermin B 1.0 B 1.1
 B 1.0 B 1.1 L: Wir wissen von, dass sie den Scheitel hat und durch den Punkt läuft. Was nichts bringt, ist beide Punkte in die allgemeine Parabelgleichung einzusetzen und das Gleichungssystem zu lösen,
B 1.0 B 1.1 L: Wir wissen von, dass sie den Scheitel hat und durch den Punkt läuft. Was nichts bringt, ist beide Punkte in die allgemeine Parabelgleichung einzusetzen und das Gleichungssystem zu lösen,
9.2. DER SATZ ÜBER IMPLIZITE FUNKTIONEN 83
 9.. DER SATZ ÜBER IMPLIZITE FUNKTIONEN 83 Die Grundfrage bei der Anwendung des Satzes über implizite Funktionen betrifft immer die folgende Situation: Wir haben eine Funktion f : V W und eine Stelle x
9.. DER SATZ ÜBER IMPLIZITE FUNKTIONEN 83 Die Grundfrage bei der Anwendung des Satzes über implizite Funktionen betrifft immer die folgende Situation: Wir haben eine Funktion f : V W und eine Stelle x
ERGÄNZUNGEN ZUR ANALYSIS II MITTELWERTSATZ UND ANWENDUNGEN
 ERGÄNZUNGEN ZUR ANALYSIS II MITTELWERTSATZ UND ANWENDUNGEN CHRISTIAN HARTFELDT. Zweiter Mittelwertsatz Der Mittelwertsatz Satz VI.3.4) lässt sich verallgemeinern zu Satz.. Seien f, g : [a, b] R auf [a,
ERGÄNZUNGEN ZUR ANALYSIS II MITTELWERTSATZ UND ANWENDUNGEN CHRISTIAN HARTFELDT. Zweiter Mittelwertsatz Der Mittelwertsatz Satz VI.3.4) lässt sich verallgemeinern zu Satz.. Seien f, g : [a, b] R auf [a,
Absolute Stetigkeit von Maßen
 Absolute Stetigkeit von Maßen Definition. Seien µ und ν Maße auf (X, Ω). Dann heißt ν absolut stetig bezüglich µ (kurz ν µ ), wenn für alle A Ω mit µ(a) = 0 auch gilt dass ν(a) = 0. Lemma. Sei ν ein endliches
Absolute Stetigkeit von Maßen Definition. Seien µ und ν Maße auf (X, Ω). Dann heißt ν absolut stetig bezüglich µ (kurz ν µ ), wenn für alle A Ω mit µ(a) = 0 auch gilt dass ν(a) = 0. Lemma. Sei ν ein endliches
1. Man schreibe die folgenden Aussagen jeweils in einen normalen Satz um. Zum Beispiel kann man die Aussage:
 Zählen und Zahlbereiche Übungsblatt 1 1. Man schreibe die folgenden Aussagen jeweils in einen normalen Satz um. Zum Beispiel kann man die Aussage: Für alle m, n N gilt m + n = n + m. in den Satz umschreiben:
Zählen und Zahlbereiche Übungsblatt 1 1. Man schreibe die folgenden Aussagen jeweils in einen normalen Satz um. Zum Beispiel kann man die Aussage: Für alle m, n N gilt m + n = n + m. in den Satz umschreiben:
Lineargleichungssysteme: Additions-/ Subtraktionsverfahren
 Lineargleichungssysteme: Additions-/ Subtraktionsverfahren W. Kippels 22. Februar 2014 Inhaltsverzeichnis 1 Einleitung 2 2 Lineargleichungssysteme zweiten Grades 2 3 Lineargleichungssysteme höheren als
Lineargleichungssysteme: Additions-/ Subtraktionsverfahren W. Kippels 22. Februar 2014 Inhaltsverzeichnis 1 Einleitung 2 2 Lineargleichungssysteme zweiten Grades 2 3 Lineargleichungssysteme höheren als
Formelsammlung zur Kreisgleichung
 zur Kreisgleichung Julia Wolters 6. Oktober 2008 Inhaltsverzeichnis 1 Allgemeine Kreisgleichung 2 1.1 Berechnung des Mittelpunktes und Radius am Beispiel..... 3 2 Kreis und Gerade 4 2.1 Sekanten, Tangenten,
zur Kreisgleichung Julia Wolters 6. Oktober 2008 Inhaltsverzeichnis 1 Allgemeine Kreisgleichung 2 1.1 Berechnung des Mittelpunktes und Radius am Beispiel..... 3 2 Kreis und Gerade 4 2.1 Sekanten, Tangenten,
Mathematik für Informatiker II. Beispiellösungen zur Probeklausur. Aufgabe 1. Aufgabe 2 (5+5 Punkte) Christoph Eisinger Sommersemester 2011
 Christoph Eisinger Sommersemester 2011") Mathematik für Informatiker II Christoph Eisinger Sommersemester 211 Beispiellösungen zur Probeklausur Aufgabe 1 Gegeben sind die Polynome f, g, h K[x]. Zu zeigen: Es gibt genau dann Polynome h 1 und h
Mathematik für Informatiker II Christoph Eisinger Sommersemester 211 Beispiellösungen zur Probeklausur Aufgabe 1 Gegeben sind die Polynome f, g, h K[x]. Zu zeigen: Es gibt genau dann Polynome h 1 und h
Welche Lagen können zwei Geraden (im Raum) zueinander haben? Welche Lagen kann eine Gerade bezüglich einer Ebene im Raum einnehmen?
 zueinander haben? Welche Lagen kann eine Gerade bezüglich einer Ebene im Raum einnehmen?") Welche Lagen können zwei Geraden (im Raum) zueinander haben? Welche Lagen können zwei Ebenen (im Raum) zueinander haben? Welche Lagen kann eine Gerade bezüglich einer Ebene im Raum einnehmen? Wie heiÿt
Welche Lagen können zwei Geraden (im Raum) zueinander haben? Welche Lagen können zwei Ebenen (im Raum) zueinander haben? Welche Lagen kann eine Gerade bezüglich einer Ebene im Raum einnehmen? Wie heiÿt
Definition 27 Affiner Raum über Vektorraum V
 Definition 27 Affiner Raum über Vektorraum V Definition 27 Affiner Raum über Vektorraum V ist die Menge A = Definition 27 Affiner Raum über Vektorraum V ist die Menge A = mit einer Abbildung + : A V A,
Definition 27 Affiner Raum über Vektorraum V Definition 27 Affiner Raum über Vektorraum V ist die Menge A = Definition 27 Affiner Raum über Vektorraum V ist die Menge A = mit einer Abbildung + : A V A,
!(0) + o 1("). Es ist damit möglich, dass mehrere Familien geschlossener Orbits gleichzeitig abzweigen.
 + o 1(). Es ist damit möglich, dass mehrere Familien geschlossener Orbits gleichzeitig abzweigen.") Bifurkationen an geschlossenen Orbits 5.4 167 der Schnittabbldung konstruiert. Die Periode T (") der zugehörigen periodischen Lösungen ergibt sich aus =! + o 1 (") beziehungsweise Es ist also t 0 = T (")
Bifurkationen an geschlossenen Orbits 5.4 167 der Schnittabbldung konstruiert. Die Periode T (") der zugehörigen periodischen Lösungen ergibt sich aus =! + o 1 (") beziehungsweise Es ist also t 0 = T (")
1. Kennlinien. 2. Stabilisierung der Emitterschaltung. Schaltungstechnik 2 Übung 4
 1. Kennlinien Der Transistor BC550C soll auf den Arbeitspunkt U CE = 4 V und I C = 15 ma eingestellt werden. a) Bestimmen Sie aus den Kennlinien (S. 2) die Werte für I B, B, U BE. b) Woher kommt die Neigung
1. Kennlinien Der Transistor BC550C soll auf den Arbeitspunkt U CE = 4 V und I C = 15 ma eingestellt werden. a) Bestimmen Sie aus den Kennlinien (S. 2) die Werte für I B, B, U BE. b) Woher kommt die Neigung
Fachschaft Mathematik und Informatik (FIM) LA I VORKURS. Herbstsemester 2015. gehalten von Harald Baum
 LA I VORKURS. Herbstsemester 2015. gehalten von Harald Baum") Fachschaft Mathematik und Informatik (FIM) LA I VORKURS Herbstsemester 2015 gehalten von Harald Baum 2. September 2015 Inhaltsverzeichnis 1. Stichpunkte zur Linearen Algebra I 2. Körper 3. Vektorräume
Fachschaft Mathematik und Informatik (FIM) LA I VORKURS Herbstsemester 2015 gehalten von Harald Baum 2. September 2015 Inhaltsverzeichnis 1. Stichpunkte zur Linearen Algebra I 2. Körper 3. Vektorräume
Lineare Funktionen. 1 Proportionale Funktionen 3 1.1 Definition... 3 1.2 Eigenschaften... 3. 2 Steigungsdreieck 3
 Lineare Funktionen Inhaltsverzeichnis 1 Proportionale Funktionen 3 1.1 Definition............................... 3 1.2 Eigenschaften............................. 3 2 Steigungsdreieck 3 3 Lineare Funktionen
Lineare Funktionen Inhaltsverzeichnis 1 Proportionale Funktionen 3 1.1 Definition............................... 3 1.2 Eigenschaften............................. 3 2 Steigungsdreieck 3 3 Lineare Funktionen
Nachklausur zur Einführung in die Geometrie im SS 2002 Lösung Aufgabe 1 1.Weg (kurz und einfach):
:") Nachklausur zur Einführung in die Geometrie im SS 2002 Lösung ufgabe 1 1.Weg (kurz und einfach): C! **C* Umlaufsinn erhalten Verschiebung oder Drehung Verbindungsgeraden *, *, CC* nicht parallel Drehung
Nachklausur zur Einführung in die Geometrie im SS 2002 Lösung ufgabe 1 1.Weg (kurz und einfach): C! **C* Umlaufsinn erhalten Verschiebung oder Drehung Verbindungsgeraden *, *, CC* nicht parallel Drehung
Primzahlen und RSA-Verschlüsselung
 Primzahlen und RSA-Verschlüsselung Michael Fütterer und Jonathan Zachhuber 1 Einiges zu Primzahlen Ein paar Definitionen: Wir bezeichnen mit Z die Menge der positiven und negativen ganzen Zahlen, also
Primzahlen und RSA-Verschlüsselung Michael Fütterer und Jonathan Zachhuber 1 Einiges zu Primzahlen Ein paar Definitionen: Wir bezeichnen mit Z die Menge der positiven und negativen ganzen Zahlen, also
6.2 Scan-Konvertierung (Scan Conversion)
") 6.2 Scan-Konvertierung (Scan Conversion) Scan-Konvertierung ist die Rasterung von einfachen Objekten (Geraden, Kreisen, Kurven). Als Ausgabemedium dient meist der Bildschirm, der aus einem Pixelraster
6.2 Scan-Konvertierung (Scan Conversion) Scan-Konvertierung ist die Rasterung von einfachen Objekten (Geraden, Kreisen, Kurven). Als Ausgabemedium dient meist der Bildschirm, der aus einem Pixelraster
Bei Konstruktionen dürfen nur die folgenden Schritte durchgeführt werden : Beliebigen Punkt auf einer Geraden, Strecke oder Kreislinie zeichnen.
 Geometrie I. Zeichnen und Konstruieren ================================================================== 1.1 Der Unterschied zwischen Zeichnen und Konstruieren Bei der Konstruktion einer geometrischen
Geometrie I. Zeichnen und Konstruieren ================================================================== 1.1 Der Unterschied zwischen Zeichnen und Konstruieren Bei der Konstruktion einer geometrischen
Grundlagen der höheren Mathematik Einige Hinweise zum Lösen von Gleichungen
 Grundlagen der höheren Mathematik Einige Hinweise zum Lösen von Gleichungen 1. Quadratische Gleichungen Quadratische Gleichungen lassen sich immer auf die sog. normierte Form x 2 + px + = 0 bringen, in
Grundlagen der höheren Mathematik Einige Hinweise zum Lösen von Gleichungen 1. Quadratische Gleichungen Quadratische Gleichungen lassen sich immer auf die sog. normierte Form x 2 + px + = 0 bringen, in
Basis und Dimension. Als nächstes wollen wir die wichtigen Begriffe Erzeugendensystem und Basis eines Vektorraums definieren.
 Basis und Dimension Als nächstes wollen wir die wichtigen Begriffe Erzeugendensystem und Basis eines Vektorraums definieren. Definition. Sei V ein K-Vektorraum und (v i ) i I eine Familie von Vektoren
Basis und Dimension Als nächstes wollen wir die wichtigen Begriffe Erzeugendensystem und Basis eines Vektorraums definieren. Definition. Sei V ein K-Vektorraum und (v i ) i I eine Familie von Vektoren
Wir gehen aus von euklidischen Anschauungsraum bzw. von der euklidischen Zeichenebene. Parallele Geraden schneiden einander nicht.
 2 Ein wenig projektive Geometrie 2.1 Fernpunkte 2.1.1 Projektive Einführung von Fernpunkten Wir gehen aus von euklidischen Anschauungsraum bzw. von der euklidischen Zeichenebene. Parallele Geraden schneiden
2 Ein wenig projektive Geometrie 2.1 Fernpunkte 2.1.1 Projektive Einführung von Fernpunkten Wir gehen aus von euklidischen Anschauungsraum bzw. von der euklidischen Zeichenebene. Parallele Geraden schneiden
Die reellen Lösungen der kubischen Gleichung
 Die reellen Lösungen der kubischen Gleichung Klaus-R. Löffler Inhaltsverzeichnis 1 Einfach zu behandelnde Sonderfälle 1 2 Die ganzrationale Funktion dritten Grades 2 2.1 Reduktion...........................................
Die reellen Lösungen der kubischen Gleichung Klaus-R. Löffler Inhaltsverzeichnis 1 Einfach zu behandelnde Sonderfälle 1 2 Die ganzrationale Funktion dritten Grades 2 2.1 Reduktion...........................................
Frohe Weihnachten und ein gutes neues Jahr!
 Frohe Weihnachten und ein gutes neues Jahr! Die mit dem Stern * gekennzeichneten Übungen sind nicht verpflichtend, aber sie liefern zusätzliche Punkte. Unten wird immer mit I das reelle Intervall [0, 1]
Frohe Weihnachten und ein gutes neues Jahr! Die mit dem Stern * gekennzeichneten Übungen sind nicht verpflichtend, aber sie liefern zusätzliche Punkte. Unten wird immer mit I das reelle Intervall [0, 1]
http://www.olympiade-mathematik.de 4. Mathematik Olympiade 2. Stufe (Kreisolympiade) Klasse 8 Saison 1964/1965 Aufgaben und Lösungen
 Klasse 8 Saison 1964/1965 Aufgaben und Lösungen") 4. Mathematik Olympiade Saison 1964/1965 Aufgaben und Lösungen 1 OJM 4. Mathematik-Olympiade Aufgaben Hinweis: Der Lösungsweg mit Begründungen und Nebenrechnungen soll deutlich erkennbar in logisch und
4. Mathematik Olympiade Saison 1964/1965 Aufgaben und Lösungen 1 OJM 4. Mathematik-Olympiade Aufgaben Hinweis: Der Lösungsweg mit Begründungen und Nebenrechnungen soll deutlich erkennbar in logisch und
7 Die Determinante einer Matrix
 7 Die Determinante einer Matrix ( ) a11 a Die Determinante einer 2 2 Matrix A = 12 ist erklärt als a 21 a 22 det A := a 11 a 22 a 12 a 21 Es ist S 2 = { id, τ}, τ = (1, 2) und sign (id) = 1, sign (τ) =
7 Die Determinante einer Matrix ( ) a11 a Die Determinante einer 2 2 Matrix A = 12 ist erklärt als a 21 a 22 det A := a 11 a 22 a 12 a 21 Es ist S 2 = { id, τ}, τ = (1, 2) und sign (id) = 1, sign (τ) =
Die Gleichung A x = a hat für A 0 die eindeutig bestimmte Lösung. Für A=0 und a 0 existiert keine Lösung.
 Lineare Gleichungen mit einer Unbekannten Die Grundform der linearen Gleichung mit einer Unbekannten x lautet A x = a Dabei sind A, a reelle Zahlen. Die Gleichung lösen heißt, alle reellen Zahlen anzugeben,
Lineare Gleichungen mit einer Unbekannten Die Grundform der linearen Gleichung mit einer Unbekannten x lautet A x = a Dabei sind A, a reelle Zahlen. Die Gleichung lösen heißt, alle reellen Zahlen anzugeben,
13. Lineare DGL höherer Ordnung. Eine DGL heißt von n-ter Ordnung, wenn Ableitungen y, y, y,... bis zur n-ten Ableitung y (n) darin vorkommen.
 darin vorkommen.") 13. Lineare DGL höherer Ordnung. Eine DGL heißt von n-ter Ordnung, wenn Ableitungen y, y, y,... bis zur n-ten Ableitung y (n) darin vorkommen. Sie heißt linear, wenn sie die Form y (n) + a n 1 y (n 1)
13. Lineare DGL höherer Ordnung. Eine DGL heißt von n-ter Ordnung, wenn Ableitungen y, y, y,... bis zur n-ten Ableitung y (n) darin vorkommen. Sie heißt linear, wenn sie die Form y (n) + a n 1 y (n 1)
Nachhilfe-Kurs Mathematik Klasse 13 Freie Waldorfschule Mitte
 Nachhilfe-Kurs Mathematik Klasse 13 Freie Waldorfschule Mitte März 2008 Zusammenfassung IB 1. Lagebeziehungen zwischen geometrischen Objekten 1.1 Punkt-Gerade Ein Punkt kann entweder auf einer gegebenen
Nachhilfe-Kurs Mathematik Klasse 13 Freie Waldorfschule Mitte März 2008 Zusammenfassung IB 1. Lagebeziehungen zwischen geometrischen Objekten 1.1 Punkt-Gerade Ein Punkt kann entweder auf einer gegebenen
Plan für Heute/Morgen
 Plan für Heute/Morgen Kongruenzsätze: aus der Schule wissen wir die SSS, SWS, und SSW Kongruenzsätze für Dreiecke: Wir wollen diese Sätze im Rahmen unseres Modells (wenn Punkte die 2 Tupel von reellen
Plan für Heute/Morgen Kongruenzsätze: aus der Schule wissen wir die SSS, SWS, und SSW Kongruenzsätze für Dreiecke: Wir wollen diese Sätze im Rahmen unseres Modells (wenn Punkte die 2 Tupel von reellen
A(3/1/2) B(6/2/2) C(5/9/4) D(1/4/3)
 B(6/2/2) C(5/9/4) D(1/4/3)") Ein Raumviereck ABCD kann eben sein oder aus zwei gegeneinander geneigten Dreiecken bestehen. In einem ebenen Viereck schneiden sich die Diagonalen. Überprüfen Sie, ob die gegebenen Vierecke eben sind.
Ein Raumviereck ABCD kann eben sein oder aus zwei gegeneinander geneigten Dreiecken bestehen. In einem ebenen Viereck schneiden sich die Diagonalen. Überprüfen Sie, ob die gegebenen Vierecke eben sind.
Übungen zum Ferienkurs Lineare Algebra WS 14/15
 Übungen zum Ferienkurs Lineare Algebra WS 14/15 Linearkombinationen, Basen, Lineare Abbildungen 2.1 Lineare Unabhängigkeit Sind die folgenden Vektoren linear unabhängig? (a) 1, 2, 3 im Q Vektorraum R (b)
Übungen zum Ferienkurs Lineare Algebra WS 14/15 Linearkombinationen, Basen, Lineare Abbildungen 2.1 Lineare Unabhängigkeit Sind die folgenden Vektoren linear unabhängig? (a) 1, 2, 3 im Q Vektorraum R (b)
Wie kann man beweisen, dass (H, ) eine Gruppe ist?
 eine Gruppe ist?") Wie kann man beweisen, dass (H, ) eine Gruppe ist? Wie kann man beweisen, dass (H, ) eine Gruppe ist? (zb wenn die Multiplikation mit Hilfe einer Tabelle gegeben ist) Wie kann man beweisen, dass (H, )
Wie kann man beweisen, dass (H, ) eine Gruppe ist? Wie kann man beweisen, dass (H, ) eine Gruppe ist? (zb wenn die Multiplikation mit Hilfe einer Tabelle gegeben ist) Wie kann man beweisen, dass (H, )
Approximation durch Taylorpolynome
 TU Berlin Fakultät II - Mathematik und Naturwissenschaften Sekretariat MA 4-1 Straße des 17. Juni 10623 Berlin Hochschultag Approximation durch Taylorpolynome Im Rahmen der Schülerinnen- und Schüler-Uni
TU Berlin Fakultät II - Mathematik und Naturwissenschaften Sekretariat MA 4-1 Straße des 17. Juni 10623 Berlin Hochschultag Approximation durch Taylorpolynome Im Rahmen der Schülerinnen- und Schüler-Uni
H. Gruber, R. Neumann. Erfolg im Mathe-Abi. Übungsbuch für die optimale Vorbereitung in Analysis, Geometrie und Stochastik mit verständlichen Lösungen
 H. Gruber, R. Neumann Erfolg im Mathe-Abi Übungsbuch für die optimale Vorbereitung in Analysis, Geometrie und Stochastik mit verständlichen Lösungen Inhaltsverzeichnis Inhaltsverzeichnis Analysis Von der
H. Gruber, R. Neumann Erfolg im Mathe-Abi Übungsbuch für die optimale Vorbereitung in Analysis, Geometrie und Stochastik mit verständlichen Lösungen Inhaltsverzeichnis Inhaltsverzeichnis Analysis Von der
Darstellungsformen einer Funktion
 http://www.flickr.com/photos/sigfrid/348144517/ Darstellungsformen einer Funktion 9 Analytische Darstellung: Eplizite Darstellung Funktionen werden nach Möglichkeit eplizit dargestellt, das heißt, die
http://www.flickr.com/photos/sigfrid/348144517/ Darstellungsformen einer Funktion 9 Analytische Darstellung: Eplizite Darstellung Funktionen werden nach Möglichkeit eplizit dargestellt, das heißt, die
Rente = laufende Zahlungen, die in regelmäßigen Zeitabschnitten (periodisch) wiederkehren Rentenperiode = Zeitabstand zwischen zwei Rentenzahlungen
 wiederkehren Rentenperiode = Zeitabstand zwischen zwei Rentenzahlungen") 1 3.2. entenrechnung Definition: ente = laufende Zahlungen, die in regelmäßigen Zeitabschnitten (periodisch) wiederkehren entenperiode = Zeitabstand zwischen zwei entenzahlungen Finanzmathematisch sind
1 3.2. entenrechnung Definition: ente = laufende Zahlungen, die in regelmäßigen Zeitabschnitten (periodisch) wiederkehren entenperiode = Zeitabstand zwischen zwei entenzahlungen Finanzmathematisch sind
Gegeben ist die Funktion f durch. Ihr Schaubild sei K.
 Aufgabe I 1 Gegeben ist die Funktion f durch. Ihr Schaubild sei K. a) Geben Sie die maximale Definitionsmenge D f an. Untersuchen Sie K auf gemeinsame Punkte mit der x-achse. Bestimmen Sie die Intervalle,
Aufgabe I 1 Gegeben ist die Funktion f durch. Ihr Schaubild sei K. a) Geben Sie die maximale Definitionsmenge D f an. Untersuchen Sie K auf gemeinsame Punkte mit der x-achse. Bestimmen Sie die Intervalle,
Nachhilfe-Kurs Mathematik Klasse 13 Freie Waldorfschule Mitte
 Nachhilfe-Kurs Mathematik Klasse 3 Freie Waldorfschule Mitte März 8 Aufgaben zur analytischen Geometrie Musterlösung Gegeben sind die Ebenen E und E sowie die Punkte A und B: E : 4x + y + 3z = 3 E : x
Nachhilfe-Kurs Mathematik Klasse 3 Freie Waldorfschule Mitte März 8 Aufgaben zur analytischen Geometrie Musterlösung Gegeben sind die Ebenen E und E sowie die Punkte A und B: E : 4x + y + 3z = 3 E : x
Definition:Eine meromorphe Modulform vom Gewicht k Z ist eine meromorphe. f : H C. (ii) C > 0, so daß f(z) im Bereich Im z > C keine Singularität hat.
 C > 0, so daß f(z) im Bereich Im z > C keine Singularität hat.") Die k/2 - Formel von Renate Vistorin Zentrales Thema dieses Vortrages ist die k/2 - Formel für meromorphe Modulformen als eine Konsequenz des Residuensatzes. Als Folgerungen werden danach einige Eigenschaften
Die k/2 - Formel von Renate Vistorin Zentrales Thema dieses Vortrages ist die k/2 - Formel für meromorphe Modulformen als eine Konsequenz des Residuensatzes. Als Folgerungen werden danach einige Eigenschaften
Würfelt man dabei je genau 10 - mal eine 1, 2, 3, 4, 5 und 6, so beträgt die Anzahl. der verschiedenen Reihenfolgen, in denen man dies tun kann, 60!.
 040304 Übung 9a Analysis, Abschnitt 4, Folie 8 Die Wahrscheinlichkeit, dass bei n - maliger Durchführung eines Zufallexperiments ein Ereignis A ( mit Wahrscheinlichkeit p p ( A ) ) für eine beliebige Anzahl
040304 Übung 9a Analysis, Abschnitt 4, Folie 8 Die Wahrscheinlichkeit, dass bei n - maliger Durchführung eines Zufallexperiments ein Ereignis A ( mit Wahrscheinlichkeit p p ( A ) ) für eine beliebige Anzahl
Definition und Begriffe
 Merkblatt: Das Dreieck Definition und Begriffe Das Dreieck ist ein Vieleck. In der Ebene ist es die einfachste Figur, die von geraden Linien begrenzt wird. Ecken: Jedes Dreieck hat drei Ecken, die meist
Merkblatt: Das Dreieck Definition und Begriffe Das Dreieck ist ein Vieleck. In der Ebene ist es die einfachste Figur, die von geraden Linien begrenzt wird. Ecken: Jedes Dreieck hat drei Ecken, die meist
Eigenwerte und Eigenvektoren von Matrizen
 Eigenwerte und Eigenvektoren von Matrizen Das Eigenwertproblem Sei A eine quadratische Matrix vom Typ m,m. Die Aufgabe, eine Zahl λ und einen dazugehörigen Vektor x zu finden, damit Ax = λx ist, nennt
Eigenwerte und Eigenvektoren von Matrizen Das Eigenwertproblem Sei A eine quadratische Matrix vom Typ m,m. Die Aufgabe, eine Zahl λ und einen dazugehörigen Vektor x zu finden, damit Ax = λx ist, nennt
Anwengungen geometrischer Abbildungen Kongruenz- und Ähnlichkeitsabbildung
 Anwengungen geometrischer Abbildungen Kongruenz- und Ähnlichkeitsabbildung Amina Duganhodzic Proseminar: Mathematisches Problemlösen Unter der Leitung von Privat Dozentin Dr. Natalia Grinberg 26. Juni
Anwengungen geometrischer Abbildungen Kongruenz- und Ähnlichkeitsabbildung Amina Duganhodzic Proseminar: Mathematisches Problemlösen Unter der Leitung von Privat Dozentin Dr. Natalia Grinberg 26. Juni
Lineare Gleichungssysteme
 Brückenkurs Mathematik TU Dresden 2015 Lineare Gleichungssysteme Schwerpunkte: Modellbildung geometrische Interpretation Lösungsmethoden Prof. Dr. F. Schuricht TU Dresden, Fachbereich Mathematik auf der
Brückenkurs Mathematik TU Dresden 2015 Lineare Gleichungssysteme Schwerpunkte: Modellbildung geometrische Interpretation Lösungsmethoden Prof. Dr. F. Schuricht TU Dresden, Fachbereich Mathematik auf der
3. Zusammenhang. 22 Andreas Gathmann
 22 Andreas Gathmann 3. Zusammenhang Eine der anschaulichsten Eigenschaften eines topologischen Raumes ist wahrscheinlich, ob er zusammenhängend ist oder aus mehreren Teilen besteht. Wir wollen dieses Konzept
22 Andreas Gathmann 3. Zusammenhang Eine der anschaulichsten Eigenschaften eines topologischen Raumes ist wahrscheinlich, ob er zusammenhängend ist oder aus mehreren Teilen besteht. Wir wollen dieses Konzept
Korrelation (II) Korrelation und Kausalität
 Korrelation und Kausalität") Korrelation (II) Korrelation und Kausalität Situation: Seien X, Y zwei metrisch skalierte Merkmale mit Ausprägungen (x 1, x 2,..., x n ) bzw. (y 1, y 2,..., y n ). D.h. für jede i = 1, 2,..., n bezeichnen
Korrelation (II) Korrelation und Kausalität Situation: Seien X, Y zwei metrisch skalierte Merkmale mit Ausprägungen (x 1, x 2,..., x n ) bzw. (y 1, y 2,..., y n ). D.h. für jede i = 1, 2,..., n bezeichnen
www.mathe-aufgaben.com
 Abiturprüfung Mathematik Baden-Württemberg (ohne CAS) Pflichtteil Aufgaben Aufgabe : ( VP) Bilden Sie die erste Ableitung der Funktion f mit sin() f() =. Aufgabe : ( VP) Berechnen Sie das Integral ( )
Abiturprüfung Mathematik Baden-Württemberg (ohne CAS) Pflichtteil Aufgaben Aufgabe : ( VP) Bilden Sie die erste Ableitung der Funktion f mit sin() f() =. Aufgabe : ( VP) Berechnen Sie das Integral ( )
( ) als den Punkt mit der gleichen x-koordinate wie A und der
 als den Punkt mit der gleichen x-koordinate wie A und der") ETH-Aufnahmeprüfung Herbst 05 Mathematik I (Analysis) Aufgabe [6 Punkte] Bestimmen Sie den Schnittwinkel α zwischen den Graphen der Funktionen f(x) x 4x + x + 5 und g(x) x x + 5 im Schnittpunkt mit der
ETH-Aufnahmeprüfung Herbst 05 Mathematik I (Analysis) Aufgabe [6 Punkte] Bestimmen Sie den Schnittwinkel α zwischen den Graphen der Funktionen f(x) x 4x + x + 5 und g(x) x x + 5 im Schnittpunkt mit der
Umgekehrte Kurvendiskussion
 Umgekehrte Kurvendiskussion Bei einer Kurvendiskussion haben wir eine Funktionsgleichung vorgegeben und versuchen ihre 'Besonderheiten' herauszufinden: Nullstellen, Extremwerte, Wendepunkte, Polstellen
Umgekehrte Kurvendiskussion Bei einer Kurvendiskussion haben wir eine Funktionsgleichung vorgegeben und versuchen ihre 'Besonderheiten' herauszufinden: Nullstellen, Extremwerte, Wendepunkte, Polstellen
Lösungsmethoden gewöhnlicher Differentialgleichungen (Dgl.)
") Lösungsmethoden gewöhnlicher Dierentialgleichungen Dgl) Allgemeine und partikuläre Lösung einer gewöhnlichen Dierentialgleichung Eine Dierentialgleichung ist eine Gleichung! Zum Unterschied von den gewöhnlichen
Lösungsmethoden gewöhnlicher Dierentialgleichungen Dgl) Allgemeine und partikuläre Lösung einer gewöhnlichen Dierentialgleichung Eine Dierentialgleichung ist eine Gleichung! Zum Unterschied von den gewöhnlichen
11.3 Komplexe Potenzreihen und weitere komplexe Funktionen
 .3 Komplexe Potenzreihen und weitere komplexe Funktionen Definition.) komplexe Folgen: z n = x n + j. y n mit zwei reellen Folgen x n und y n.) Konvergenz: Eine komplexe Folge z n = x n + j. y n heißt
.3 Komplexe Potenzreihen und weitere komplexe Funktionen Definition.) komplexe Folgen: z n = x n + j. y n mit zwei reellen Folgen x n und y n.) Konvergenz: Eine komplexe Folge z n = x n + j. y n heißt
Mengensysteme, Wahrscheinlichkeitsmaße
 Kapitel 1 Mengensysteme, Wahrscheinlichkeitsmaße Der Großteil der folgenden fundamentalen Begriffe sind schon aus der Vorlesung Stochastische Modellbildung bekannt: Definition 1.1 Eine Familie A von Teilmengen
Kapitel 1 Mengensysteme, Wahrscheinlichkeitsmaße Der Großteil der folgenden fundamentalen Begriffe sind schon aus der Vorlesung Stochastische Modellbildung bekannt: Definition 1.1 Eine Familie A von Teilmengen
Die Näherung durch die Sekante durch die Punkte A und C ist schlechter, da der Punkt C weiter von A entfernt liegt.
 LÖSUNGEN TEIL 1 Arbeitszeit: 50 min Gegeben ist die Funktion f mit der Gleichung. Begründen Sie, warum die Steigung der Sekante durch die Punkte A(0 2) und C(3 11) eine weniger gute Näherung für die Tangentensteigung
LÖSUNGEN TEIL 1 Arbeitszeit: 50 min Gegeben ist die Funktion f mit der Gleichung. Begründen Sie, warum die Steigung der Sekante durch die Punkte A(0 2) und C(3 11) eine weniger gute Näherung für die Tangentensteigung
t r Lineare Codierung von Binärbbäumen (Wörter über dem Alphabet {, }) Beispiel code( ) = code(, t l, t r ) = code(t l ) code(t r )
 Beispiel code( ) = code(, t l, t r ) = code(t l ) code(t r )") Definition B : Menge der binären Bäume, rekursiv definiert durch die Regeln: ist ein binärer Baum sind t l, t r binäre Bäume, so ist auch t =, t l, t r ein binärer Baum nur das, was durch die beiden vorigen
Definition B : Menge der binären Bäume, rekursiv definiert durch die Regeln: ist ein binärer Baum sind t l, t r binäre Bäume, so ist auch t =, t l, t r ein binärer Baum nur das, was durch die beiden vorigen
Falten regelmäßiger Vielecke
 Blatt 1 Gleichseitige Dreiecke Ausgehend von einem quadratischen Stück Papier kann man ohne weiteres Werkzeug viele interessante geometrische Figuren nur mit den Mitteln des Papierfaltens (Origami) erzeugen.
Blatt 1 Gleichseitige Dreiecke Ausgehend von einem quadratischen Stück Papier kann man ohne weiteres Werkzeug viele interessante geometrische Figuren nur mit den Mitteln des Papierfaltens (Origami) erzeugen.
Vom goldenen Schnitt zum Alexanderplatz in Berlin
 Vom goldenen Schnitt zum Alexanderplatz in Berlin Mathematik von 1200 bis 2004 Stefan Kühling, Fachbereich Mathematik skuehling @ fsmath.mathematik.uni-dortmund.de Schnupper Uni 26. August 2004 1 1 Goldener
Vom goldenen Schnitt zum Alexanderplatz in Berlin Mathematik von 1200 bis 2004 Stefan Kühling, Fachbereich Mathematik skuehling @ fsmath.mathematik.uni-dortmund.de Schnupper Uni 26. August 2004 1 1 Goldener
6.2 Perfekte Sicherheit
 04 6.2 Perfekte Sicherheit Beweis. H(B AC) + H(A C) = H(ABC) H(AC) + H(AC) H(C) Wegen gilt Einsetzen in die Definition gibt = H(AB C). H(A BC) = H(AB C) H(B C). I(A; B C) = H(A C) H(AB C) + H(B C). Da
04 6.2 Perfekte Sicherheit Beweis. H(B AC) + H(A C) = H(ABC) H(AC) + H(AC) H(C) Wegen gilt Einsetzen in die Definition gibt = H(AB C). H(A BC) = H(AB C) H(B C). I(A; B C) = H(A C) H(AB C) + H(B C). Da
Vorlesung. Funktionen/Abbildungen 1
 Vorlesung Funktionen/Abbildungen 1 1 Grundlagen Hinweis: In dieser Vorlesung werden Funktionen und Abbildungen synonym verwendet. In der Schule wird eine Funktion häufig als eindeutige Zuordnung definiert.
Vorlesung Funktionen/Abbildungen 1 1 Grundlagen Hinweis: In dieser Vorlesung werden Funktionen und Abbildungen synonym verwendet. In der Schule wird eine Funktion häufig als eindeutige Zuordnung definiert.
Informationsblatt Induktionsbeweis
 Sommer 015 Informationsblatt Induktionsbeweis 31. März 015 Motivation Die vollständige Induktion ist ein wichtiges Beweisverfahren in der Informatik. Sie wird häufig dazu gebraucht, um mathematische Formeln
Sommer 015 Informationsblatt Induktionsbeweis 31. März 015 Motivation Die vollständige Induktion ist ein wichtiges Beweisverfahren in der Informatik. Sie wird häufig dazu gebraucht, um mathematische Formeln
Gleichungen und Ungleichungen
 Gleichungen Ungleichungen. Lineare Gleichungen Sei die Gleichung ax = b gegeben, wobei x die Unbekannte ist a, b reelle Zahlen sind. Diese Gleichung hat als Lösung die einzige reelle Zahl x = b, falls
Gleichungen Ungleichungen. Lineare Gleichungen Sei die Gleichung ax = b gegeben, wobei x die Unbekannte ist a, b reelle Zahlen sind. Diese Gleichung hat als Lösung die einzige reelle Zahl x = b, falls
3.1. Die komplexen Zahlen
 3.1. Die komplexen Zahlen Es gibt viele Wege, um komplexe Zahlen einzuführen. Wir gehen hier den wohl einfachsten, indem wir C R als komplexe Zahlenebene und die Punkte dieser Ebene als komplexe Zahlen
3.1. Die komplexen Zahlen Es gibt viele Wege, um komplexe Zahlen einzuführen. Wir gehen hier den wohl einfachsten, indem wir C R als komplexe Zahlenebene und die Punkte dieser Ebene als komplexe Zahlen
Also kann nur A ist roter Südler und B ist grüner Nordler gelten.
 Aufgabe 1.1: (4 Punkte) Der Planet Og wird von zwei verschiedenen Rassen bewohnt - dem grünen und dem roten Volk. Desweiteren sind die Leute, die auf der nördlichen Halbkugel geboren wurden von denen auf
Aufgabe 1.1: (4 Punkte) Der Planet Og wird von zwei verschiedenen Rassen bewohnt - dem grünen und dem roten Volk. Desweiteren sind die Leute, die auf der nördlichen Halbkugel geboren wurden von denen auf
Im Jahr t = 0 hat eine Stadt 10.000 Einwohner. Nach 15 Jahren hat sich die Einwohnerzahl verdoppelt. z(t) = at + b
 = at + b") Aufgabe 1: Im Jahr t = 0 hat eine Stadt 10.000 Einwohner. Nach 15 Jahren hat sich die Einwohnerzahl verdoppelt. (a) Nehmen Sie lineares Wachstum gemäß z(t) = at + b an, wobei z die Einwohnerzahl ist und
Aufgabe 1: Im Jahr t = 0 hat eine Stadt 10.000 Einwohner. Nach 15 Jahren hat sich die Einwohnerzahl verdoppelt. (a) Nehmen Sie lineares Wachstum gemäß z(t) = at + b an, wobei z die Einwohnerzahl ist und
Kap. 8: Speziell gewählte Kurven
 Stefan Lucks 8: Spezielle Kurven 82 Verschl. mit Elliptischen Kurven Kap. 8: Speziell gewählte Kurven Zur Erinnerung: Für beliebige El. Kurven kann man den Algorithmus von Schoof benutzen, um die Anzahl
Stefan Lucks 8: Spezielle Kurven 82 Verschl. mit Elliptischen Kurven Kap. 8: Speziell gewählte Kurven Zur Erinnerung: Für beliebige El. Kurven kann man den Algorithmus von Schoof benutzen, um die Anzahl
Theoretische Grundlagen der Informatik WS 09/10
 Theoretische Grundlagen der Informatik WS 09/10 - Tutorium 6 - Michael Kirsten und Kai Wallisch Sitzung 13 02.02.2010 Inhaltsverzeichnis 1 Formeln zur Berechnung Aufgabe 1 2 Hamming-Distanz Aufgabe 2 3
Theoretische Grundlagen der Informatik WS 09/10 - Tutorium 6 - Michael Kirsten und Kai Wallisch Sitzung 13 02.02.2010 Inhaltsverzeichnis 1 Formeln zur Berechnung Aufgabe 1 2 Hamming-Distanz Aufgabe 2 3
Funktionen (linear, quadratisch)
") Funktionen (linear, quadratisch) 1. Definitionsbereich Bestimme den Definitionsbereich der Funktion f(x) = 16 x 2 2x + 4 2. Umkehrfunktionen Wie lauten die Umkehrfunktionen der folgenden Funktionen? (a)
Funktionen (linear, quadratisch) 1. Definitionsbereich Bestimme den Definitionsbereich der Funktion f(x) = 16 x 2 2x + 4 2. Umkehrfunktionen Wie lauten die Umkehrfunktionen der folgenden Funktionen? (a)
Was meinen die Leute eigentlich mit: Grexit?
 Was meinen die Leute eigentlich mit: Grexit? Grexit sind eigentlich 2 Wörter. 1. Griechenland 2. Exit Exit ist ein englisches Wort. Es bedeutet: Ausgang. Aber was haben diese 2 Sachen mit-einander zu tun?
Was meinen die Leute eigentlich mit: Grexit? Grexit sind eigentlich 2 Wörter. 1. Griechenland 2. Exit Exit ist ein englisches Wort. Es bedeutet: Ausgang. Aber was haben diese 2 Sachen mit-einander zu tun?
Repetitionsaufgaben: Lineare Funktionen
 Kantonale Fachschaft Mathematik Repetitionsaufgaben: Lineare Funktionen Zusammengestellt von Irina Bayer-Krakvina, KSR Lernziele: - Wissen, was ein Steigungsdreieck einer Geraden ist und wie die Steigungszahl
Kantonale Fachschaft Mathematik Repetitionsaufgaben: Lineare Funktionen Zusammengestellt von Irina Bayer-Krakvina, KSR Lernziele: - Wissen, was ein Steigungsdreieck einer Geraden ist und wie die Steigungszahl
Teil III: Routing - Inhalt I. Literatur. Geometric Routing. Voraussetzungen. Unit Disk Graph (UDG) Geometric Routing 29
 Geometric Routing 29") 1 29 Teil III: Routing - Inhalt I Literatur Compass & Face Routing Bounded & Adaptive Face Routing Nicht Ω(1) UDG E. Kranakis, H. Singh und Jorge Urrutia: Compass Routing on Geometric Networks. Canadian
1 29 Teil III: Routing - Inhalt I Literatur Compass & Face Routing Bounded & Adaptive Face Routing Nicht Ω(1) UDG E. Kranakis, H. Singh und Jorge Urrutia: Compass Routing on Geometric Networks. Canadian
14 Schmiegeparabel und Freunde, Taylor-Reihe
 14 Schmiegeparabel und Freunde, Taylor-Reihe Jörn Loviscach Versionsstand: 20. März 2012, 16:01 Die nummerierten Felder sind absichtlich leer, zum Ausfüllen in der Vorlesung. Videos dazu: http://www.j3l7h.de/videos.html
14 Schmiegeparabel und Freunde, Taylor-Reihe Jörn Loviscach Versionsstand: 20. März 2012, 16:01 Die nummerierten Felder sind absichtlich leer, zum Ausfüllen in der Vorlesung. Videos dazu: http://www.j3l7h.de/videos.html
OECD Programme for International Student Assessment PISA 2000. Lösungen der Beispielaufgaben aus dem Mathematiktest. Deutschland
 OECD Programme for International Student Assessment Deutschland PISA 2000 Lösungen der Beispielaufgaben aus dem Mathematiktest Beispielaufgaben PISA-Hauptstudie 2000 Seite 3 UNIT ÄPFEL Beispielaufgaben
OECD Programme for International Student Assessment Deutschland PISA 2000 Lösungen der Beispielaufgaben aus dem Mathematiktest Beispielaufgaben PISA-Hauptstudie 2000 Seite 3 UNIT ÄPFEL Beispielaufgaben
Austausch- bzw. Übergangsprozesse und Gleichgewichtsverteilungen
 Austausch- bzw. Übergangsrozesse und Gleichgewichtsverteilungen Wir betrachten ein System mit verschiedenen Zuständen, zwischen denen ein Austausch stattfinden kann. Etwa soziale Schichten in einer Gesellschaft:
Austausch- bzw. Übergangsrozesse und Gleichgewichtsverteilungen Wir betrachten ein System mit verschiedenen Zuständen, zwischen denen ein Austausch stattfinden kann. Etwa soziale Schichten in einer Gesellschaft:
Darstellende Geometrie Übungen. Tutorial. Übungsblatt: Perspektive - Rekonstruktion
 Darstellende Geometrie Übungen Institut für Architektur und Medien Tutorial Übungsblatt: Perspektive - Rekonstruktion Gegeben sind ein Foto von einem quaderförmigen Objekt sowie die Abmessungen des Basisrechteckes.
Darstellende Geometrie Übungen Institut für Architektur und Medien Tutorial Übungsblatt: Perspektive - Rekonstruktion Gegeben sind ein Foto von einem quaderförmigen Objekt sowie die Abmessungen des Basisrechteckes.
Tangentengleichung. Wie lautet die Geradengleichung für die Tangente, y T =? Antwort:
 Tangentengleichung Wie Sie wissen, gibt die erste Ableitung einer Funktion deren Steigung an. Betrachtet man eine fest vorgegebene Stelle, gibt f ( ) also die Steigung der Kurve und somit auch die Steigung
Tangentengleichung Wie Sie wissen, gibt die erste Ableitung einer Funktion deren Steigung an. Betrachtet man eine fest vorgegebene Stelle, gibt f ( ) also die Steigung der Kurve und somit auch die Steigung
WS 2008/09. Diskrete Strukturen
 WS 2008/09 Diskrete Strukturen Prof. Dr. J. Esparza Lehrstuhl für Grundlagen der Softwarezuverlässigkeit und theoretische Informatik Fakultät für Informatik Technische Universität München http://www7.in.tum.de/um/courses/ds/ws0809
WS 2008/09 Diskrete Strukturen Prof. Dr. J. Esparza Lehrstuhl für Grundlagen der Softwarezuverlässigkeit und theoretische Informatik Fakultät für Informatik Technische Universität München http://www7.in.tum.de/um/courses/ds/ws0809
8. Quadratische Reste. Reziprozitätsgesetz
 O Forster: Prizahlen 8 Quadratische Reste Rezirozitätsgesetz 81 Definition Sei eine natürliche Zahl 2 Eine ganze Zahl a heißt uadratischer Rest odulo (Abkürzung QR, falls die Kongruenz x 2 a od eine Lösung
O Forster: Prizahlen 8 Quadratische Reste Rezirozitätsgesetz 81 Definition Sei eine natürliche Zahl 2 Eine ganze Zahl a heißt uadratischer Rest odulo (Abkürzung QR, falls die Kongruenz x 2 a od eine Lösung
Lösungen zur Vorrundenprüfung 2006
 Lösungen zur Vorrundenprüfung 2006 Zuerst einige Bemerkungen zum Punkteschema. Eine vollständige und korrekte Lösung einer Aufgabe ist jeweils 7 Punkte wert. Für komplette Lösungen mit kleineren Fehlern
Lösungen zur Vorrundenprüfung 2006 Zuerst einige Bemerkungen zum Punkteschema. Eine vollständige und korrekte Lösung einer Aufgabe ist jeweils 7 Punkte wert. Für komplette Lösungen mit kleineren Fehlern
0, v 6 = 2 2. 1, v 4 = 1. 2. span(v 1, v 5, v 6 ) = span(v 1, v 2, v 3, v 4, v 5, v 6 ) 4. span(v 1, v 2, v 4 ) = span(v 2, v 3, v 5, v 6 )
 = span(v 1, v 2, v 3, v 4, v 5, v 6 ) 4. span(v 1, v 2, v 4 ) = span(v 2, v 3, v 5, v 6 )") Aufgabe 65. Ganz schön span(n)end. Gegeben sei folgende Menge M von 6 Vektoren v, v,..., v 6 R 4 aus Aufgabe P 6: M = v =, v =, v =, v 4 =, v 5 =, v 6 = Welche der folgenden Aussagen sind wahr? span(v,
Aufgabe 65. Ganz schön span(n)end. Gegeben sei folgende Menge M von 6 Vektoren v, v,..., v 6 R 4 aus Aufgabe P 6: M = v =, v =, v =, v 4 =, v 5 =, v 6 = Welche der folgenden Aussagen sind wahr? span(v,
Kurzeinführung zum Plotten in Maple
 Kurzeinführung zum Plotten in Maple Dies ist eine sehr kurze Einführung, die lediglich einen Einblick in die Visualisierung von Funktionen und Mengen gestatten soll und keinesfalls um Vollständigkeit bemüht
Kurzeinführung zum Plotten in Maple Dies ist eine sehr kurze Einführung, die lediglich einen Einblick in die Visualisierung von Funktionen und Mengen gestatten soll und keinesfalls um Vollständigkeit bemüht
Lichtbrechung an Linsen
 Sammellinsen Lichtbrechung an Linsen Fällt ein paralleles Lichtbündel auf eine Sammellinse, so werden die Lichtstrahlen so gebrochen, dass sie durch einen Brennpunkt der Linse verlaufen. Der Abstand zwischen
Sammellinsen Lichtbrechung an Linsen Fällt ein paralleles Lichtbündel auf eine Sammellinse, so werden die Lichtstrahlen so gebrochen, dass sie durch einen Brennpunkt der Linse verlaufen. Der Abstand zwischen
Kapitalerhöhung - Verbuchung
 Kapitalerhöhung - Verbuchung Beschreibung Eine Kapitalerhöhung ist eine Erhöhung des Aktienkapitals einer Aktiengesellschaft durch Emission von en Aktien. Es gibt unterschiedliche Formen von Kapitalerhöhung.
Kapitalerhöhung - Verbuchung Beschreibung Eine Kapitalerhöhung ist eine Erhöhung des Aktienkapitals einer Aktiengesellschaft durch Emission von en Aktien. Es gibt unterschiedliche Formen von Kapitalerhöhung.
Rente = laufende Zahlungen, die in regelmäßigen Zeitabschnitten (periodisch) wiederkehren Rentenperiode = Zeitabstand zwischen zwei Rentenzahlungen
 wiederkehren Rentenperiode = Zeitabstand zwischen zwei Rentenzahlungen") 5.2. entenrechnung Definition: ente = laufende Zahlungen, die in regelmäßigen Zeitabschnitten (periodisch) wiederkehren entenperiode = Zeitabstand zwischen zwei entenzahlungen Finanzmathematisch sind zwei
5.2. entenrechnung Definition: ente = laufende Zahlungen, die in regelmäßigen Zeitabschnitten (periodisch) wiederkehren entenperiode = Zeitabstand zwischen zwei entenzahlungen Finanzmathematisch sind zwei
Repetitionsaufgaben Wurzelgleichungen
 Repetitionsaufgaben Wurzelgleichungen Inhaltsverzeichnis A) Vorbemerkungen B) Lernziele C) Theorie mit Aufgaben D) Aufgaben mit Musterlösungen 4 A) Vorbemerkungen Bitte beachten Sie: Bei Wurzelgleichungen
Repetitionsaufgaben Wurzelgleichungen Inhaltsverzeichnis A) Vorbemerkungen B) Lernziele C) Theorie mit Aufgaben D) Aufgaben mit Musterlösungen 4 A) Vorbemerkungen Bitte beachten Sie: Bei Wurzelgleichungen
Grundlagen der Theoretischen Informatik, SoSe 2008
 1. Aufgabenblatt zur Vorlesung Grundlagen der Theoretischen Informatik, SoSe 2008 (Dr. Frank Hoffmann) Lösung von Manuel Jain und Benjamin Bortfeldt Aufgabe 2 Zustandsdiagramme (6 Punkte, wird korrigiert)
1. Aufgabenblatt zur Vorlesung Grundlagen der Theoretischen Informatik, SoSe 2008 (Dr. Frank Hoffmann) Lösung von Manuel Jain und Benjamin Bortfeldt Aufgabe 2 Zustandsdiagramme (6 Punkte, wird korrigiert)
Lineare Algebra und analytische Geometrie II (Unterrichtsfach)
") MATHEMATISCHES INSTITUT DER UNIVERSITÄT MÜNCHEN Prof. Dr. D. Rost SS 0 Blatt.06.0 Übungen zur Vorlesung Lineare Algebra und analytische Geometrie II (Unterrichtsfach) Abgabe: Dienstag, 0. Juli 0, bis 4:00
MATHEMATISCHES INSTITUT DER UNIVERSITÄT MÜNCHEN Prof. Dr. D. Rost SS 0 Blatt.06.0 Übungen zur Vorlesung Lineare Algebra und analytische Geometrie II (Unterrichtsfach) Abgabe: Dienstag, 0. Juli 0, bis 4:00
Der Zwei-Quadrate-Satz von Fermat
 Der Zwei-Quadrate-Satz von Fermat Proseminar: Das BUCH der Beweise Fridtjof Schulte Steinberg Institut für Informatik Humboldt-Universität zu Berlin 29.November 2012 1 / 20 Allgemeines Pierre de Fermat
Der Zwei-Quadrate-Satz von Fermat Proseminar: Das BUCH der Beweise Fridtjof Schulte Steinberg Institut für Informatik Humboldt-Universität zu Berlin 29.November 2012 1 / 20 Allgemeines Pierre de Fermat
Lineare Gleichungssysteme
 Lineare Gleichungssysteme Sei K ein Körper, a ij K für 1 i m, 1 j n. Weiters seien b 1,..., b m K. Dann heißt a 11 x 1 + a 12 x 2 +... + a 1n x n = b 1 a 21 x 1 + a 22 x 2 +... + a 2n x n = b 2... a m1
Lineare Gleichungssysteme Sei K ein Körper, a ij K für 1 i m, 1 j n. Weiters seien b 1,..., b m K. Dann heißt a 11 x 1 + a 12 x 2 +... + a 1n x n = b 1 a 21 x 1 + a 22 x 2 +... + a 2n x n = b 2... a m1