EL Formeln. Kapitel 2. Lastformen. Bewegungsprofile. Kraft. Leistung. = gespeicherte Energie. Rotation. Wirkungsgrad.
|
|
|
- Reinhold Wolf
- vor 6 Jahren
- Abrufe
Transkript







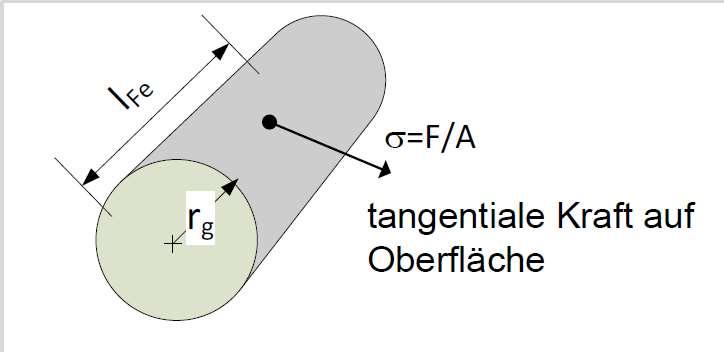
1 Kapitel 2 EL Formeln Freitag, 7. April :40 Kraft Leistung = gespeicherte Energie Rotation Wirkungsgrad Trägheitsmoment mechanische Drehfrequenz Drehzahl / Winkelgeschw. Leiter im Magnetfeld Drehmoment Kraftdichte / Drehschub Momenteneffektivwert Lastformen Bewegungsprofile begrenzte Beschleunigung begrenzte Drehzahl Lastkennlinien von typischen Antriebsanwendungen EL Seite 1


2 EL Seite 2 Getriebe Übersetzungsverhältnis Last-Trägheitsmoment Gesamt Trägheitsmoment Spindel Geschwindigkeit der linearen Bewegung Kraft auf der Last Last-Trägheitsmoment Zahnstange Geschwindigkeit Kraft Kräftebilanz Wärme Arbeitspunkt Linearisierung um kleinen Zeitintervall Δt Elektrische Maschinen

3 EL Seite 3 Wirkungsweise Motorbetrieb Kapitel 3 Lorentzkraft auf einen Leiter verketteter Fluss der Ankerwicklung => Maschinenkonstante inneres Moment mechanische Winkelgeschwindigkeit induzierte Spannung einer Windung Induzierte Spannung einer Ankerwindung



4 EL Seite 4 Ersatzschaltung Gleichstrommaschine Ankerspannung Moment Leistungsgleichungen elektrische Leistung elektrische Verluste innere Leistung mechanische Verluste mechanische Leistung Motorbetrieb Generatorbetrieb Maschinengleichungen Betriebskennlinien für Ankerstellbereich Drehzahlverhalten bei Belastung: Drehzahl- Drehmoment-Kennlinie Bei konstanten Werten Steigung a ist negativ n-achsenabschnitt b entspricht der Leerlaufdrehzahl n0 Umkehrfunktion zur Kennliniengleichung
5 Erregung mit Feldwicklung Betriebsgrössen in Funktion der Drehzahl bei Ankernennstrom Betriebskennlinien Übersicht Schaltungsarten mit Feldwicklungen Schaltelemente der Leistungselektronik nach Funktion gegliedert Dioden Symbol Ersatzschaltbild Kennlinie Schaltvorgang der Diode Transistoren EL Seite 5


6 EL Seite 6 Schaltvorgang in der Leistungselektronik Idealer Schalter mit antiparalleler ebenfalls idealer Diode und Einbettung in einer realen Umgebung Reale Schaltvorgänge Eine einfache Abschätzung des Überschwingens ist mit der Berechnung der Umlagerung der Energie in von der Induktivität in die Kapazität möglich. in der Induktivität in der Kapazität komplette Umlagerung der Energie von einer Induktivität in einen Kondensator Resonanzfrequenz Vereinfachte Spannungs-, Strom- und Leistungsverläufe bei den Schaltvorgängen

7 EL Seite 7 Snubber (Entlastungs-) Netzwerke am Tiefsetzsteller und Vergleich der Orts-kurven von Strom und Spannung. Gleichstromsteller Duty-cycle Ausgangsspannung Stromgleichung Spannungsmittelwert Lastspannung Eingangsstrom Spulenspannung Stromrippel Ausgangsleistung Eingangsleistung Steuerverfahren
8 2 Quadranten-Steller Übersetzungsfaktor beim Hochsetzsteller Ausbau auf 4 Quadranten mögliche Schaltzustände H-Brücke: u2(t), i2(t) bei Betrieb in 4 Quadranten bei unipolarer Taktung Notizen: EL Seite 8 Strompfade der 4 Quadranten im unipolaren Betrieb


9 EL Seite 9 Kapitel 4 Rotor (Remanenzinduktion): Erwärmung 100 K verliert ein NdFeB Magnet ca. 12% seiner Remanenzinduktion Induktion Induktionsgesetz Mag. Fluss verketteter magnetischer Fluss Ψ Drehzahlkonstanten Spannungskonstante Drehmoment und Leistung Leistung entspricht Mittelwert Drehmoment der Maschine Drehmomentkonstante k elektrische Zeitkonstante Impedanz aus der Motorinduktivität Strom Anfangsbeschleunigung Endgeschwindigkeit mechanischen Zeitkonstante Synchronmaschinen Drehstromspeisung Sternschaltung Dreieckschaltung Gesamtleistung in beiden Fällen Motorenkonstanten



10 EL Seite 10 Systemgestaltung Blockkommutierung Spannungssteuerung, PWM 6 Strompfade Betriebsverhalten = Gleichstrommachine Höhere Belastung: -> Strom steigt -> Innere Spannungsabfälle grösser = Drehzahl sinkt Schalter 1/1 = 1 Kurzschluss Unipolar: Ausgangsspannung zwischen positiven oder negativen Maximalwert und Null Bipolar: Ausgangsspannung zwischen positiven und dem negativen Maximalwert -Mit fester Spannung ist die Maschine gesteuert betrieben die Drehzahl stellt sich aufgrund der Belastung ein. Mit den Motorparam. Kann der Arbeitspunkt berechnet werden. -EC-Motor entspricht DC -Drehzahlsteurung muss die Spannung verändert werden können Blockschaltung, bipolare PWM -Mit Rückkoppelung ist ein geregelter Betrieb möglich -Spannungssteuerung mit PWM Sinuskommutierung Sensorlose Komutierung Verketteter Fluss in einer Wicklung

11 EL Seite 11 Asynchronmaschine Kapitel 5 Winkelgeschwindigkeit Statordrehfeld Synchrondrehzahl Statordrehfeld Wechselstrom Rotorstrang Rotor dreht langsamer als Statordrehfeld Drehzahl Rotor Winkelgeschwindigkeit Rotor Rotorfrequenz Schlupf Winkelgeschwindigkeit Drehfeld bezüglich Rotor Ersatzschaltung Rotorersatzschaltung für Rotorfrequenz Rotorersatzschaltung für Statorfrequenz Umrechnung auf Statorfrequenz (Motorbetrieb) Ersatzschaltung Maschinenstrang mit Übertrager äquivalenter Lastwiderstand (Motorbetrieb) Ersatzschaltung Maschinenstrang, auf Statorseite umgerechnet Übersetzung Leistungsfluss P = P = 3 U η I cos φ primäre Scheinleistung Leistungsfluss pro Strang primäre Wirkleistung Wicklungsverluste Stator Eisenverluste Luftspaltleistung Wicklungsverluste Rotor innere Leistung / elektro-mechanische Wandlung Reibungsverluste mechanische Leistung Bedingungen für Motorbetrieb:

12 EL Seite 12 Betriebskennlinien inneres Moment gute Kopplung inneres Moment, Kloss sche Gleichung Kippmoment, maximales Moment Betriebsbereiche Bereich M, Motorbetrieb 0 < n < n1: Der Rotor eilt dem Statordrehfeld nach und läuft untersynchron. Bereich G, Generatorbetrieb n > n1: Der Rotor eilt dem Statordrehfeld vor und läuft übersynchron. Bereich B, Gegenstrombremse oder gegensynchroner Betrieb n < 0: Der Rotor dreht sich gegen das Statordrehfeld. Der Schlupf ist grösser als eins. Sowohl die Bremsleistung wie auch die im Stator zugeführte Leistung werden im Rotor umgesetzt. Bei einem Schleifringläufer kann die Leistung nach aussen abgeführt werden. Bei einem Kurzschlussläufer ist das ein für die Rotorerwärmung kritischer Betriebsfall. Kippschlupf Drehzahlvariabler Betrieb Polpaarzahl Drehzahl Rotor f1 Statorfrequenz s Schlupf p Polpaarzahl Drehzahländerung Frequenzsteuerung Schlupfsteuerung Änderung der Polpaarzahl Sanftanlasser für Asynchronmaschine Stern-Dreieck-Anlauf Sanftanlasser Umrichter Umrichter Gleichrichtfaktor Blockschema Umrichter mit Spannungszwischenkreis ideale Gleichspannung Gleichstrom Gleichstromleistung Wirkungsgrad NSR (bei grösseren Anlagen) Ersatzschaltung Netzstromrichter für Wechselstrom Wechselstrom Grundschwingungsgehalt Strom (aus Fourieranalyse) Eingangsscheinleistung Ein-, Ausgangsgrössen B2U-Schaltung mit Glättung und R-Last Eingangswirkleistung Eingangsblindleistung Phasenverschiebung Netzseite Leistungsfaktor Netzseite
13 EL Seite 13 Netzstromrichter für Drehstrom gleichgerichtete Spannung Ersatzschaltung NSR Gleichrichtfaktor ideale Gleichspannung Lade- und Entladestrom Zwischenkreis Gleichstromleistung Ein-, Ausgangsgrössen B6U-Schaltung mit Glättung und R-Last Wirkungsgrad NSR (bei grösseren Anlagen) Leiterstrom Grundschwingungsgehalt Strom (aus Fourieranalyse) Eingangsscheinleistung Eingangswirkleistung Eingangsblindleistung Phasenverschiebung Netzseite Leistungsfaktor Netzseite Modulationsverfahren Pulsbreiten-Modulation (PWM): Tein variabel, T konstant. Die Schaltung arbeitet mit einer festen Schaltfrequenz. Diese Variante wird zusammen mit einem Sinusfilter verwendet, das die Schaltfrequenz aus der Ausgangsspannung herausfiltert (z. B. bei einer USV). Pulsfrequenz-Modulation: Tein konstant, T variabel. Die Schaltung arbeitet mit einer festen Einschaltdauer Tein. Diese Variante kommt nur in Spezial-fällen vor (bei minimaler Pulsdauer). 2-Punkt-Regelung: Tein variabel, T variabel. Die Schaltung arbeitet mit einem Toleranzband um den Sollwert des Stromes. Wird der obere Rand des Toleranzbandes erreicht, wird ausgeschaltet, wird der untere Rand erreicht, wird eingeschaltet. Diese Variante kommt häufig vor. Modulationsfunktion Phase U Modulationsfunktion Phase V M Modulationsgrad f1 Modulationsfrequenz, Grundschwingung Dreiecksfrequenz, Pulsfrequenz gepulste Leiterspannung UV Grundschwingung bei M M Grundschwingung bei M = 1 erweiterte Modulationsfunktion U Grundschwingung bei M = Modulationswert für U
14 EL Seite 14 Berechnung PSR im Wechselrichterbetrieb (ASM im Motorbetrieb) Grundschwingungsgehalt Spannung (aus Fourieranalyse; Näherung) Spannung Maschine Strom Maschine (Δ-, Y-Schaltung) Scheinleistung Grundschwingungs-Scheinleistung Wirkleistung Blindleistung Phasenverschiebung Grundschwingung Leistungsfaktor Verschiebungsfaktor Wirkungsgrad PSR (bei grösseren Anlagen) Gleichstromleistung
Ausgewählte Kapitel der Energieelektronik 1, Fach Nr. 5931. Asynchronmaschinen
 Ausgewählte Kapitel der Energieelektronik 1, Fach Nr. 5931 Prof. Dr.-Ing. H. Alt Asynchronmaschinen Der Asynchronmotor ist der am meisten verwendete Industriemotor. Er kann direkt (mit Motorschutzschalter)
Ausgewählte Kapitel der Energieelektronik 1, Fach Nr. 5931 Prof. Dr.-Ing. H. Alt Asynchronmaschinen Der Asynchronmotor ist der am meisten verwendete Industriemotor. Er kann direkt (mit Motorschutzschalter)
Kreisfrequenz: Komplexe Strom und Spannungszeiger. Zusammenhang: Wechselstromrechnung
 Imaginäre Einheit j - 1 Formelsammlung elektrische Energietechnik Grundlagen & Wechselstromlehre Kartesische Darstellung komplexer Zahlen: Komplexe Zahlen haben die Form z x + jy, wobei x und y reele Zahlen
Imaginäre Einheit j - 1 Formelsammlung elektrische Energietechnik Grundlagen & Wechselstromlehre Kartesische Darstellung komplexer Zahlen: Komplexe Zahlen haben die Form z x + jy, wobei x und y reele Zahlen
Zusammenfassung elektrische Maschinen Gleichstrommaschine
 Gleichstrommaschine i F F F F U = R I + Ui U F = RF IF Gleichstrommaschine Induzierte Spannung: Ursache: Änderung des magnetischen Flusses in der Leiterschleife Ui = c φf Erzeugung des magnetischen Flusses:
Gleichstrommaschine i F F F F U = R I + Ui U F = RF IF Gleichstrommaschine Induzierte Spannung: Ursache: Änderung des magnetischen Flusses in der Leiterschleife Ui = c φf Erzeugung des magnetischen Flusses:
4.4 ASM: Stromverdrängungsläufer Seite 1
 4.4 ASM: Stromverdrängungsläufer Seite 1 Stromverdrängung Mit zunehmender Größe wird das Anlaufmoment von Asynchronmaschinen im Verhältnis zum Kipp- und Nennmoment kleiner weil die ohmschen Widerstände
4.4 ASM: Stromverdrängungsläufer Seite 1 Stromverdrängung Mit zunehmender Größe wird das Anlaufmoment von Asynchronmaschinen im Verhältnis zum Kipp- und Nennmoment kleiner weil die ohmschen Widerstände
Elektrotechnik für Maschinenbauer. Grundlagen der Elektrotechnik für Maschinenbauer Konsultation 12: Elektrische Maschinen
 Elektrotechnik für aschinenbauer Grundlagen der Elektrotechnik für aschinenbauer Konsultation 12: Elektrische aschinen 1. Einleitung Bei den elektrischen aschinen unterscheidet man Transformatoren, Gleichstrommaschinen,
Elektrotechnik für aschinenbauer Grundlagen der Elektrotechnik für aschinenbauer Konsultation 12: Elektrische aschinen 1. Einleitung Bei den elektrischen aschinen unterscheidet man Transformatoren, Gleichstrommaschinen,
Elektrische Maschinen
 1/5 Elektrische Maschinen 1 unktionsprinzipien 1.1 Kraftwirkung efindet sich ein stromdurchflossener, gerader Leiter der Leiterlänge l in einem homogenen Magnetfeld, so bewirkt die Lorentz-Kraft auf die
1/5 Elektrische Maschinen 1 unktionsprinzipien 1.1 Kraftwirkung efindet sich ein stromdurchflossener, gerader Leiter der Leiterlänge l in einem homogenen Magnetfeld, so bewirkt die Lorentz-Kraft auf die
1. Allgemeines. 1.1. Verwendete Geräte. Geräte-Platz 11
 1. Allgemeines...2 1.1. Verwendete Geräte... 2 1.2. Messgeräte:... 3 2. Asynchronmotor...4 2.1. Aufgabenstellung... 4 2.2. Messaufbau... 4 2.3. Vorgangsweise... 5 3. Gleichstrommotor - Drehmoment-Drehzahl-Kennlinie...8
1. Allgemeines...2 1.1. Verwendete Geräte... 2 1.2. Messgeräte:... 3 2. Asynchronmotor...4 2.1. Aufgabenstellung... 4 2.2. Messaufbau... 4 2.3. Vorgangsweise... 5 3. Gleichstrommotor - Drehmoment-Drehzahl-Kennlinie...8
Theoretische Grundlagen
 Theoretische Grundlagen m eistungsbereich oberhalb 0,75 kw ("integral horsepower") sind etwa 7% der gefertigten elektrischen Maschinen Gleichstrommaschinen. Haupteinsatzgebiete sind Hüttenund Walzwerke,
Theoretische Grundlagen m eistungsbereich oberhalb 0,75 kw ("integral horsepower") sind etwa 7% der gefertigten elektrischen Maschinen Gleichstrommaschinen. Haupteinsatzgebiete sind Hüttenund Walzwerke,
6 Die Synchronmaschine
 Universität Stuttgart Institut für Leistungselektronik und Elektrische Antriebe Prof. Dr.-Ing. J. Roth-Stielow 6.1.2 Prinzip 6 Die Synchronmaschine 6.1 Einführung Rotor 6.1.1 Anwendung und Einsatz Herausragende
Universität Stuttgart Institut für Leistungselektronik und Elektrische Antriebe Prof. Dr.-Ing. J. Roth-Stielow 6.1.2 Prinzip 6 Die Synchronmaschine 6.1 Einführung Rotor 6.1.1 Anwendung und Einsatz Herausragende
Inhalt. Vorwort... 5. Benutzerhinweise... 7
 Vorwort.......................................................... 5 Benutzerhinweise.................................................. 7 0 Einführung in das Simulationssystem Portunus.................
Vorwort.......................................................... 5 Benutzerhinweise.................................................. 7 0 Einführung in das Simulationssystem Portunus.................
Gleichstrommaschinen. Auf dem Anker sind viele in Reihe geschalten Spulen, dadurch sinkt die Welligkeit der Gleichspannung.
 Matura Komplementärfragen Gleichstrommaschinen Allgemeines zu Spannungserzeugung im Magnetfeld: Die Ankerwicklung wird im Magnetfeld der feststehenden Aussenpole gedreht und dadurch wird eine Spannung
Matura Komplementärfragen Gleichstrommaschinen Allgemeines zu Spannungserzeugung im Magnetfeld: Die Ankerwicklung wird im Magnetfeld der feststehenden Aussenpole gedreht und dadurch wird eine Spannung
Inhaltsverzeichnis. Seite
 Inhaltsverzeichnis 1 Grundlagen 1.1 Magnetisches Feld... 9 1.2 Bewegte Leiterschleife im Magnetfeld... 12 1.3 Ruhende Leiterschleife im magnetischen Wechselfeld... 15 1.4 Stromdurchflossene Leiterschleife
Inhaltsverzeichnis 1 Grundlagen 1.1 Magnetisches Feld... 9 1.2 Bewegte Leiterschleife im Magnetfeld... 12 1.3 Ruhende Leiterschleife im magnetischen Wechselfeld... 15 1.4 Stromdurchflossene Leiterschleife
Elbtalwerk GmbH. Universität Karlsruhe Elektrotechnisches Institut. Geschalteter Reluktanzmotor. Drehmomentstarker Elektromotor mit kleinem Bauvolumen
 Elbtalwerk GmbH Geschalteter Reluktanzmotor Drehmomentstarker Elektromotor mit kleinem Bauvolumen Strom B1 Wicklung A1 D4 C1 C4 Pol D1 Drehung B4 A2 Rotorzahn Welle A4 B2 Feldlinie D3 C2 C3 D2 Stator A3
Elbtalwerk GmbH Geschalteter Reluktanzmotor Drehmomentstarker Elektromotor mit kleinem Bauvolumen Strom B1 Wicklung A1 D4 C1 C4 Pol D1 Drehung B4 A2 Rotorzahn Welle A4 B2 Feldlinie D3 C2 C3 D2 Stator A3
Elektromschinen in Theorie und Praxis
 Prof. Dr.-Ing. Ali Farschtschi Elektromschinen in Theorie und Praxis Aufbau, Wirkungsweisen, Anwendungen, Auswahl- und Auslegungskriterien VDE VERLAG Berlin Offenbach Inhalt Formelzeichen 19 0 Einführung.25
Prof. Dr.-Ing. Ali Farschtschi Elektromschinen in Theorie und Praxis Aufbau, Wirkungsweisen, Anwendungen, Auswahl- und Auslegungskriterien VDE VERLAG Berlin Offenbach Inhalt Formelzeichen 19 0 Einführung.25
Lernkontrolle Motoren
 Lernkontrolle Motoren Zeit 45 Min. 40 40 Pkt. Hinweise Wird nicht benotet! Lösen Sie die Aufgaben auf separatem Papier. Ich wünsche Ihnen viel Erfolg! Aufgabenstellung 1. Wie kann Dreiphasenwechselstrom
Lernkontrolle Motoren Zeit 45 Min. 40 40 Pkt. Hinweise Wird nicht benotet! Lösen Sie die Aufgaben auf separatem Papier. Ich wünsche Ihnen viel Erfolg! Aufgabenstellung 1. Wie kann Dreiphasenwechselstrom
Drehzahlvariabler Betrieb von Drehstrommaschinen
 Drehzahlvariable Antriebe Drehzahlvariable elektrische Antriebe werden heute in den meisten Fällen mit Käfigläufer Asynchronmaschinen, manchmal auch mit permanentmagneterregten Synchronmaschinen ausgeführt.
Drehzahlvariable Antriebe Drehzahlvariable elektrische Antriebe werden heute in den meisten Fällen mit Käfigläufer Asynchronmaschinen, manchmal auch mit permanentmagneterregten Synchronmaschinen ausgeführt.
5. Synchronmaschine. Elektrische Energietechnik (S8803) Seite 5.1 Synchronmaschine
 Seite 5.1 Synchronmaschine") Elektrische Energietechnik (S8803) Seite 5.1 5. Die ist wie die Asynchronmaschine eine Drehfeldmaschine, wobei ein wesentlicher Unterschied vorliegt: Sie kann nur bei einer synchronen Drehzahl betrieben
Elektrische Energietechnik (S8803) Seite 5.1 5. Die ist wie die Asynchronmaschine eine Drehfeldmaschine, wobei ein wesentlicher Unterschied vorliegt: Sie kann nur bei einer synchronen Drehzahl betrieben
1. Elektrotechnische Grundlagen
 . Elektrotechnische Grundlagen Teil 6 - Transformator Prinzip, Belastung, Wirkungsgrad, Arten, Messwandler Georg Strauss --- 09-009 ET--6 09/009 Idealer Transformator Beim idealen Transformator wird angenommen,
. Elektrotechnische Grundlagen Teil 6 - Transformator Prinzip, Belastung, Wirkungsgrad, Arten, Messwandler Georg Strauss --- 09-009 ET--6 09/009 Idealer Transformator Beim idealen Transformator wird angenommen,
Bundestechnologiezentrum für Elektro- und Informationstechnik e.v.
 Lernprogramm Grundlagen der Elektrotechnik 4 Themenübersicht Magnetismus Dauermagnetismus Einführung Historisches Einteilung Magnetismus Eigenschaften von Magneten Erde / Sonne Prinzip Grundbegriffe und
Lernprogramm Grundlagen der Elektrotechnik 4 Themenübersicht Magnetismus Dauermagnetismus Einführung Historisches Einteilung Magnetismus Eigenschaften von Magneten Erde / Sonne Prinzip Grundbegriffe und
Man unterscheidet zwischen statischen Wechselrichtern und rotierenden Wechselrichtern.
 Wechselstromsteller 1 / 14 :HFKVHOULFKWHU (LQI KUXQJ:HFKVHOULFKWHU Mit Wechselrichtern wird Gleichstrom in Wechselstrom umgewandelt Die Energierichtung verläuft vom Gleichstrom zum Wechselstromsystem.
Wechselstromsteller 1 / 14 :HFKVHOULFKWHU (LQI KUXQJ:HFKVHOULFKWHU Mit Wechselrichtern wird Gleichstrom in Wechselstrom umgewandelt Die Energierichtung verläuft vom Gleichstrom zum Wechselstromsystem.
LAGERSTRÖME 1 EINLEITUNG 2 WELLENSPANNUNGEN. Lagerströme 1. M. R. Rezaei
 Lagerströme 1 LAGERSTRÖME M. R. Rezaei 1 EINLEITUNG Stromfluss durch Lager kann bei Maschinen mit Wälz- und Gleitlagern zu Schäden bis hin zum totalen Ausfall führen. Im Netzbetrieb geht die Gefährdung
Lagerströme 1 LAGERSTRÖME M. R. Rezaei 1 EINLEITUNG Stromfluss durch Lager kann bei Maschinen mit Wälz- und Gleitlagern zu Schäden bis hin zum totalen Ausfall führen. Im Netzbetrieb geht die Gefährdung
Gesteuerter Energieaustausch zwischen einem Wechsel- oder Drehstromsystem und einem Gleichstromsystem veränderlicher Polarität.
 Universität Stuttgart Institut für Leistungselektronik und Elektrische Antriebe Prof. Dr.-Ing. J. Roth-Stielow.8 Umkehrstromrichter.8.1 Die Grundaufgabe des Umkehrstromrichters und ihre Lösung Gesteuerter
Universität Stuttgart Institut für Leistungselektronik und Elektrische Antriebe Prof. Dr.-Ing. J. Roth-Stielow.8 Umkehrstromrichter.8.1 Die Grundaufgabe des Umkehrstromrichters und ihre Lösung Gesteuerter
Zur DRIVE-E Akademie 2010. Vor- und Nachteile verschiedener Motorkonzepte für Fahrantriebe
 ELEKTROMOTOREN Zur DRIVE-E Akademie 2010 Vor- und Nachteile verschiedener Motorkonzepte für Fahrantriebe Dipl. Ing. (FH) Johannes Oswald Elektromotoren GmbH, Miltenberg 5000 Hauptantriebe/a / Design /
ELEKTROMOTOREN Zur DRIVE-E Akademie 2010 Vor- und Nachteile verschiedener Motorkonzepte für Fahrantriebe Dipl. Ing. (FH) Johannes Oswald Elektromotoren GmbH, Miltenberg 5000 Hauptantriebe/a / Design /
Stromortskurve Asynchronmaschine
 Stromortskurve der Asynchronmaschine Prof. Dr.-Ing. Carsten Fräger Folie 1 von 61 Prof. Dr.-Ing. Stromortskurve Asynchronmaschine Stromortskurve der Drehstrom-Asynchronmaschine mit kurzgeschlossenem Rotor
Stromortskurve der Asynchronmaschine Prof. Dr.-Ing. Carsten Fräger Folie 1 von 61 Prof. Dr.-Ing. Stromortskurve Asynchronmaschine Stromortskurve der Drehstrom-Asynchronmaschine mit kurzgeschlossenem Rotor
Machines Electriques Elektrische Maschinen. Synchronmaschinen
 Machines Electriques Elektrische Maschinen Synchronmaschinen Inhalt 1 Einleitung... 3 2 Aufbau und Arten... 3 2.1 Die Außenpolmaschine... 3 2.2 Die Innenpolmaschine... 3 2.2.1 Der Ständer... 3 2.2.2 Der
Machines Electriques Elektrische Maschinen Synchronmaschinen Inhalt 1 Einleitung... 3 2 Aufbau und Arten... 3 2.1 Die Außenpolmaschine... 3 2.2 Die Innenpolmaschine... 3 2.2.1 Der Ständer... 3 2.2.2 Der
Drehstrom-Asynchronmaschine (DAM)
") Universität Stuttgart Institut für Leistungselektronik und Elektrische Antriebe Abt. Elektrische Energiewandlung Prof. Dr.-Ing. N. Parspour Grundlagenpraktikum Versuch 007 Drehstrom-Asynchronmaschine (DAM)
Universität Stuttgart Institut für Leistungselektronik und Elektrische Antriebe Abt. Elektrische Energiewandlung Prof. Dr.-Ing. N. Parspour Grundlagenpraktikum Versuch 007 Drehstrom-Asynchronmaschine (DAM)
Grundpraktikum. Versuch 2 - Elektrische Antriebe
 Grundpraktikum Versuch 2 - Elektrische Antriebe Untersuchung des stationären und dynamischen Betriebsverhaltens einer Asynchronmaschine mit Kurzschlussläufer Institut für Elektrische Energietechnik Univ.-Prof.
Grundpraktikum Versuch 2 - Elektrische Antriebe Untersuchung des stationären und dynamischen Betriebsverhaltens einer Asynchronmaschine mit Kurzschlussläufer Institut für Elektrische Energietechnik Univ.-Prof.
Versuchsanleitung. Labor Mechatronik. Versuch BV_1 Elektrische Antriebstechnik. Labor Mechatronik Versuch BV-1 Elektrische Antriebstechnik
 Fachbereich 2 Ingenieurwissenschaften II Labor Mechatronik Lehrgebiet: Mechatronik Versuchsanleitung Steuerungund Regelung Versuch BV_1 Elektrische Antriebstechnik Bildquellen: Fa. LUCAS NÜLLE April 2012
Fachbereich 2 Ingenieurwissenschaften II Labor Mechatronik Lehrgebiet: Mechatronik Versuchsanleitung Steuerungund Regelung Versuch BV_1 Elektrische Antriebstechnik Bildquellen: Fa. LUCAS NÜLLE April 2012
maxon EC motor Bürstenlose DC Motoren: Eine Einführung
 maxon EC motor Bürstenlose DC Motoren: Eine Einführung Varianten: maxon EC Motorfamilien Gemeinsamkeiten Funktionsprinzip Wicklungsbeschaltung, Eisenverluste Elektronische Kommutierungssysteme Blockkommutierung
maxon EC motor Bürstenlose DC Motoren: Eine Einführung Varianten: maxon EC Motorfamilien Gemeinsamkeiten Funktionsprinzip Wicklungsbeschaltung, Eisenverluste Elektronische Kommutierungssysteme Blockkommutierung
Ziehl-Abegg AG. Dieter Rieger. Leiter Marketing & Vertrieb Geschäftsbereich Antriebstechnik. Technik der Getriebelose Aufzugsmaschine
 Version 1.0 Oktober 2005 Ziehl-Abegg AG Technik der Getriebelose Aufzugsmaschine Dieter Rieger Leiter Marketing & Vertrieb Geschäftsbereich Antriebstechnik Heinz-Ziehl-Straße 74653 Künzelsau Telefon: +49
Version 1.0 Oktober 2005 Ziehl-Abegg AG Technik der Getriebelose Aufzugsmaschine Dieter Rieger Leiter Marketing & Vertrieb Geschäftsbereich Antriebstechnik Heinz-Ziehl-Straße 74653 Künzelsau Telefon: +49
6.5 Transformator (Versuch 54)
") 3 6.5 Transformator (Versuch 54) (Fassung 03/0) Physikalische Grundlagen Der ideale Transformator: Ein Transformator besteht aus zwei (oder mehr) Spulen meist unterschiedlicher Windungszahl und. An der
3 6.5 Transformator (Versuch 54) (Fassung 03/0) Physikalische Grundlagen Der ideale Transformator: Ein Transformator besteht aus zwei (oder mehr) Spulen meist unterschiedlicher Windungszahl und. An der
KERNLOSE DC-BÜRSTENMOTOREN TECHNISCHER LEITFADEN. von Simon Pata
 thinkmotion KERNLOSE DC-BÜRSTENMOTOREN TECHNISCHER LEITFADEN von Simon Pata IKERNLOSE DC-BÜRSTENMOTOREN TECHNISCHER LEITFADEN Kernlose DC-Bürstenmotoren sind in den verschiedensten Produkten und Anwendungen
thinkmotion KERNLOSE DC-BÜRSTENMOTOREN TECHNISCHER LEITFADEN von Simon Pata IKERNLOSE DC-BÜRSTENMOTOREN TECHNISCHER LEITFADEN Kernlose DC-Bürstenmotoren sind in den verschiedensten Produkten und Anwendungen
Multilevel Inverters Mehrpunkt-Wechselrichter
 Vorlesung Umwandlung Elektrischer Energie mit Leistungselektronik Multilevel Inverters Mehrpunkt-Wechselrichter Prof. Dr.-Ing. Ralph Kennel Lehrstuhl für Elektrische Antriebssysteme und Leistungselektronik
Vorlesung Umwandlung Elektrischer Energie mit Leistungselektronik Multilevel Inverters Mehrpunkt-Wechselrichter Prof. Dr.-Ing. Ralph Kennel Lehrstuhl für Elektrische Antriebssysteme und Leistungselektronik
Asynchronmotor. Grundpraktikum. Gemeinsames. Versuch-Nr.: E403
 Gemeinsames Grundpraktikum Asynchronmotor Versuch-Nr.: E403 Ziel: Kennenlernen des Anlauf- und Betriebsverhaltens der Asynchronmaschine mit Kurzschlussläufer und Schleifringläufer im Motorbetrieb. Für
Gemeinsames Grundpraktikum Asynchronmotor Versuch-Nr.: E403 Ziel: Kennenlernen des Anlauf- und Betriebsverhaltens der Asynchronmaschine mit Kurzschlussläufer und Schleifringläufer im Motorbetrieb. Für
Advanced Motion Control Techniques. Dipl. Ing. Jan Braun maxon motor ag Switzerland
 Advanced Motion Control Techniques Dipl. Ing. Jan Braun maxon motor ag Switzerland Agenda Schematiascher Aufbau Positionsregelkreis Übersicht Motion Control Systeme PC based mit CANopen für DC und EC Motoren
Advanced Motion Control Techniques Dipl. Ing. Jan Braun maxon motor ag Switzerland Agenda Schematiascher Aufbau Positionsregelkreis Übersicht Motion Control Systeme PC based mit CANopen für DC und EC Motoren
FACHHOCHSCHULE Bielefeld 8. Juli 2002 Fachbereich Elektrotechnik
 FACHHOCHSCHULE Bielefeld 8. Juli 2002 Fachbereich Elektrotechnik Professor Dr. Ing. habil. K. Hofer Klausur zu LEISTUNGSELEKTRONIK UND ANTRIEBE (LEA) Bearbeitungsdauer: Hilfsmittel: 3.0 Zeitstunden Vorlesungsskriptum,
FACHHOCHSCHULE Bielefeld 8. Juli 2002 Fachbereich Elektrotechnik Professor Dr. Ing. habil. K. Hofer Klausur zu LEISTUNGSELEKTRONIK UND ANTRIEBE (LEA) Bearbeitungsdauer: Hilfsmittel: 3.0 Zeitstunden Vorlesungsskriptum,
Lehrstuhl: Elektrische Antriebe und Maschinen Prof. Dr.-Ing. Bernhard Piepenbreier Prof. Dr.-Ing. Ingo Hahn
 Lehrstuhl: Elektrische Antriebe und Maschinen Prof. Dr.-Ing. Bernhard Piepenbreier Prof. Dr.-Ing. Ingo Hahn Fächerkatalog Stand Pie 09.06.2009 Titel der Lehrveranstaltung SWS V SWS Ü WS SS Grundlagen der
Lehrstuhl: Elektrische Antriebe und Maschinen Prof. Dr.-Ing. Bernhard Piepenbreier Prof. Dr.-Ing. Ingo Hahn Fächerkatalog Stand Pie 09.06.2009 Titel der Lehrveranstaltung SWS V SWS Ü WS SS Grundlagen der
Prüfung Einführung in die Elektrotechnik
 Prüfung Einführung in die Elektrotechnik (Einführung in die Elektrotechnik *12210 für ee, fmt, mabau, mecha, tema, tp,..) (Einführung in die Elektrotechnik 1 und 2 für medtech) (Einführung in die Elektrotechnik
Prüfung Einführung in die Elektrotechnik (Einführung in die Elektrotechnik *12210 für ee, fmt, mabau, mecha, tema, tp,..) (Einführung in die Elektrotechnik 1 und 2 für medtech) (Einführung in die Elektrotechnik
Funktionsweise Synchronmaschine II
 Vorlesung Elektrische Aktoren und Sensoren in geregelten Antrieben Funktionsweise Synchronmaschine II Prof. Dr. Ing. Ralph Kennel (ralph.kennel@tum.de) Technische Universität München Arcisstraße 21 80333
Vorlesung Elektrische Aktoren und Sensoren in geregelten Antrieben Funktionsweise Synchronmaschine II Prof. Dr. Ing. Ralph Kennel (ralph.kennel@tum.de) Technische Universität München Arcisstraße 21 80333
6. Synchronmaschine. EM1, Kovalev/Novender/Kern (Fachbereich IEM)
") 1 Prinzipielle Wirkungsweise Außenpolgenerator: Erregung außen; fest Spannungsinduktion innen; rotiert Energieübertragung mittels Schleifringe 2 Prinzipielle Wirkungsweise Außenpolmaschine: Erregung hier
1 Prinzipielle Wirkungsweise Außenpolgenerator: Erregung außen; fest Spannungsinduktion innen; rotiert Energieübertragung mittels Schleifringe 2 Prinzipielle Wirkungsweise Außenpolmaschine: Erregung hier
Wechselspannung, Wechselstrom, Generatoren
 Wechselspannung, Wechselstrom, Generatoren Ein Generator ist eine Maschine, die kinetische Energie in elektrische Energie umwandelt. Generatoren erzeugen durch Induktion Strom (z.b. Fahrraddynamo). Benötigt
Wechselspannung, Wechselstrom, Generatoren Ein Generator ist eine Maschine, die kinetische Energie in elektrische Energie umwandelt. Generatoren erzeugen durch Induktion Strom (z.b. Fahrraddynamo). Benötigt
Transformator. Praktikum. Grundlagen der Elektrotechnik. Versuch: Versuchsanleitung. 0. Allgemeines
 Praktikum Grundlagen der Elektrotechnik Versuch: Transformator Versuchsanleitung 0. Allgemeines Eine sinnvolle Teilnahme am Praktikum ist nur durch eine gute Vorbereitung auf dem jeweiligen Stoffgebiet
Praktikum Grundlagen der Elektrotechnik Versuch: Transformator Versuchsanleitung 0. Allgemeines Eine sinnvolle Teilnahme am Praktikum ist nur durch eine gute Vorbereitung auf dem jeweiligen Stoffgebiet
Komplexpraktikum Elektrotechnik - Elektrische Antriebe. Umrichtergespeister Drehstromantrieb
 April 2012 Komplexpraktikum Elektrotechnik - Elektrische Antriebe Umrichtergespeister Drehstromantrieb für tudiengang CT/AT, Fakultät ET 1. Versuchsziel ie lernen das stationäre Betriebsverhalten eines
April 2012 Komplexpraktikum Elektrotechnik - Elektrische Antriebe Umrichtergespeister Drehstromantrieb für tudiengang CT/AT, Fakultät ET 1. Versuchsziel ie lernen das stationäre Betriebsverhalten eines
Inhaltsverzeichnis. 4 Tran.isturen... 33. 3 Dioden... 15. 1 Was ist Leistungselektronik?... 1 VII
 VII Inhaltsverzeichnis 1 Was ist Leistungselektronik?... 1 2 Grundlagen... 3 2.1 Die elektrische Leitflihigkeit...... 3 2.1.1 Eigenleitung... 5 2.1.2 Störstellenleitung... 6 2.2 Der pn-übergang... 7 2.2.1
VII Inhaltsverzeichnis 1 Was ist Leistungselektronik?... 1 2 Grundlagen... 3 2.1 Die elektrische Leitflihigkeit...... 3 2.1.1 Eigenleitung... 5 2.1.2 Störstellenleitung... 6 2.2 Der pn-übergang... 7 2.2.1
Bei Aufgaben, die mit einem * gekennzeichnet sind, können Sie neu ansetzen.
 Name: Elektrotechnik Mechatronik Abschlussprüfung E/ME-BAC/DIPL Elektronische Bauelemente SS2012 Prüfungstermin: Prüfer: Hilfsmittel: 18.7.2012 (90 Minuten) Prof. Dr.-Ing. Großmann, Prof. Dr. Frey Taschenrechner
Name: Elektrotechnik Mechatronik Abschlussprüfung E/ME-BAC/DIPL Elektronische Bauelemente SS2012 Prüfungstermin: Prüfer: Hilfsmittel: 18.7.2012 (90 Minuten) Prof. Dr.-Ing. Großmann, Prof. Dr. Frey Taschenrechner
18. Magnetismus in Materie
 18. Magnetismus in Materie Wir haben den elektrischen Strom als Quelle für Magnetfelder kennen gelernt. Auch das magnetische Verhalten von Materie wird durch elektrische Ströme bestimmt. Die Bewegung der
18. Magnetismus in Materie Wir haben den elektrischen Strom als Quelle für Magnetfelder kennen gelernt. Auch das magnetische Verhalten von Materie wird durch elektrische Ströme bestimmt. Die Bewegung der
4.5 Wechselstromkreise
 4.5 Wechselstromkreise Wechselstrom in vielen Punkten praktischer: ransformatoren Elektromotoren Frequenz als Referenz... Prinzip der Erzeugung einer sinusförmigen Wechselspannung: V: Wechselstromgenerator
4.5 Wechselstromkreise Wechselstrom in vielen Punkten praktischer: ransformatoren Elektromotoren Frequenz als Referenz... Prinzip der Erzeugung einer sinusförmigen Wechselspannung: V: Wechselstromgenerator
Energietechnisches Praktikum II
 INSTITUT FÜR ELEKTRISCHE MASCHINEN RHEINISCH-WESTFÄLISCHE TECHNISCHE HOCHSCHULE AACHEN Energietechnisches Praktikum II Versuch : Die Asynchronmaschine in feldorientierter Regelung Einleitung Versuchsvorbereitung.
INSTITUT FÜR ELEKTRISCHE MASCHINEN RHEINISCH-WESTFÄLISCHE TECHNISCHE HOCHSCHULE AACHEN Energietechnisches Praktikum II Versuch : Die Asynchronmaschine in feldorientierter Regelung Einleitung Versuchsvorbereitung.
Elektrische Maschinen und Antriebe
 Andreas Kremser Elektrische Maschinen und Antriebe Grundlagen, Motoren und Anwendungen Andreas Kremser Elektrische Maschinen und Antriebe Grundlagen, Motoren und Anwendungen 2., überarbeitete und ergänzte
Andreas Kremser Elektrische Maschinen und Antriebe Grundlagen, Motoren und Anwendungen Andreas Kremser Elektrische Maschinen und Antriebe Grundlagen, Motoren und Anwendungen 2., überarbeitete und ergänzte
Bezieht man sich auf die Merkmale der Eingangs- und Ausgangsspannungen, so gibt es vier grundsätzliche Umwandlungsmöglichkeiten.
 ELECTROTECHNIQE G LEICHRICHTERSCHALTNGEN 1. Stromrichter Stromrichter sind elektrische Netzwerke aus Leistungshalbleitern, wie Leistungsdioden, Thyristoren und Leistungstransistoren, zur kontinuierlichen
ELECTROTECHNIQE G LEICHRICHTERSCHALTNGEN 1. Stromrichter Stromrichter sind elektrische Netzwerke aus Leistungshalbleitern, wie Leistungsdioden, Thyristoren und Leistungstransistoren, zur kontinuierlichen
Einführung in die Physik II für Studierende der Naturwissenschaften und Zahnheilkunde. Sommersemester 2007. VL #29 am 19.06.2007.
 Einführung in die Physik II für Studierende der Naturwissenschaften und Zahnheilkunde Sommersemester 2007 VL #29 am 19.06.2007 Vladimir Dyakonov Induktionsspannung Bewegung der Leiterschleife im homogenen
Einführung in die Physik II für Studierende der Naturwissenschaften und Zahnheilkunde Sommersemester 2007 VL #29 am 19.06.2007 Vladimir Dyakonov Induktionsspannung Bewegung der Leiterschleife im homogenen
Rotierende Leiterschleife
 Wechselstrom Rotierende Leiterschleife B r Veränderung der Form einer Leiterschleife in einem magnetischen Feld induziert eine Spannung ( 13.1.3) A r r B zur kontinuierlichen Induktion von Spannung: periodische
Wechselstrom Rotierende Leiterschleife B r Veränderung der Form einer Leiterschleife in einem magnetischen Feld induziert eine Spannung ( 13.1.3) A r r B zur kontinuierlichen Induktion von Spannung: periodische
Einführung in die Elektrotechnik
 Prof. Dr.-Ing. habil. Klaus Lunze Einführung in die Elektrotechnik Lehrbuch für Elektrotechnik als Hauptfach 12., überarbeitete Auflage Dr. Alfred Hüthig Verlag Heidelberg Inhaltsverzeichnis 0. Vorbetrachtungen
Prof. Dr.-Ing. habil. Klaus Lunze Einführung in die Elektrotechnik Lehrbuch für Elektrotechnik als Hauptfach 12., überarbeitete Auflage Dr. Alfred Hüthig Verlag Heidelberg Inhaltsverzeichnis 0. Vorbetrachtungen
Leistungselektronik Grundlagen und Standardanwendungen. Praktikumsunterlagen
 Lehrstuhl für Elektrische Antriebssysteme und Leistungselektronik Technische Universität München Arcisstraße 21 D 80333 München Email: eal@ei.tum.de Internet: http://www.eal.ei.tum.de Prof. Dr.-Ing. Ralph
Lehrstuhl für Elektrische Antriebssysteme und Leistungselektronik Technische Universität München Arcisstraße 21 D 80333 München Email: eal@ei.tum.de Internet: http://www.eal.ei.tum.de Prof. Dr.-Ing. Ralph
Physikalische Grundlagen zur Betrachtung der Funktionalität des resonanten Synchrongenerators QEG Revision 1c
 Physikalische Grundlagen zur Betrachtung der Funktionalität des resonanten Synchrongenerators QEG Revision 1c 23.04.14 Alex-L Hinweis: Diese Beschreibung ist für Ingenieure gedacht, welche mit dem Induktionsgesetz
Physikalische Grundlagen zur Betrachtung der Funktionalität des resonanten Synchrongenerators QEG Revision 1c 23.04.14 Alex-L Hinweis: Diese Beschreibung ist für Ingenieure gedacht, welche mit dem Induktionsgesetz
1. Schema PÜVV 7. 3. Generatoren 29 3.1 Definition 31 3.2 Einführung 31 3.3 Synchron-Maschine 37 3.4 Dreiphasige Asynchron Maschine 44
 Inhaltsverzeichnis 1. Schema PÜVV 7 2. Die Grundprinzipien 9 2.1 Stromkreise 11 2.2 Elektrische Grössen 11 2.3 Anwendung von Wechselstrom 19 2.4 Eigenschaften von Wechselstromnetzen 24 2.5 Eigenschaften
Inhaltsverzeichnis 1. Schema PÜVV 7 2. Die Grundprinzipien 9 2.1 Stromkreise 11 2.2 Elektrische Grössen 11 2.3 Anwendung von Wechselstrom 19 2.4 Eigenschaften von Wechselstromnetzen 24 2.5 Eigenschaften
Übungsaufgaben zur Vorlesung Elektrotechnik 1
 Fachhochschule Esslingen - Hochschule für Technik Fachbereich Informationstechnik Übungsaufgaben zur Vorlesung Elektrotechnik 1 Fachhochschule Esslingen - Hochschule für Technik Fachbereich Informationstechnik
Fachhochschule Esslingen - Hochschule für Technik Fachbereich Informationstechnik Übungsaufgaben zur Vorlesung Elektrotechnik 1 Fachhochschule Esslingen - Hochschule für Technik Fachbereich Informationstechnik
Wir betrachten wieder die Leiterschleife im homogenen Magnetfeld von <29.2.>: Im rechten Schenkel der Leiterschleife herrscht ein E r '-Feld 1
 3. Wechselstrom I 3.. Erzeugung von Wechselströmen Wir betrachten wieder die eiterschleife im homogenen Magnetfeld von : Wie wir dort bereits festgestellt hatten führt ein Strom in der eiterschleife
3. Wechselstrom I 3.. Erzeugung von Wechselströmen Wir betrachten wieder die eiterschleife im homogenen Magnetfeld von : Wie wir dort bereits festgestellt hatten führt ein Strom in der eiterschleife
B3 Ansteuerung von Schrittmotoren
 23 Einführung Wird ein hoch präziser Antrieb benötigt, so werden gerne Schrittmotoren eingesetzt. Gegenüber anderen Motoren bieten Schrittmotoren folgende Vorteile: Sehr exakte Positionierung und konstante
23 Einführung Wird ein hoch präziser Antrieb benötigt, so werden gerne Schrittmotoren eingesetzt. Gegenüber anderen Motoren bieten Schrittmotoren folgende Vorteile: Sehr exakte Positionierung und konstante
SRLA. Aktoren. Version 1.4. HTL Mössingerstraße, Abt. Elektronik DI. Harald Grünanger Dezember 2013
 SRLA Aktoren Version 1.4 HTL Mössingerstraße, Abt. Elektronik DI. Harald Grünanger Dezember 2013 Nur für den Unterrichtsgebrauch gedacht, darf nicht an Dritte weitergegeben werden! Inhaltsverzeichnis 1
SRLA Aktoren Version 1.4 HTL Mössingerstraße, Abt. Elektronik DI. Harald Grünanger Dezember 2013 Nur für den Unterrichtsgebrauch gedacht, darf nicht an Dritte weitergegeben werden! Inhaltsverzeichnis 1
1 Allgemeine Grundlagen
 1 Allgemeine Grundlagen 1.1 Gleichstromkreis 1.1.1 Stromdichte Die Stromdichte in einem stromdurchflossenen Leiter mit der Querschnittsfläche A ist definiert als: j = di da di da Stromelement 1.1.2 Die
1 Allgemeine Grundlagen 1.1 Gleichstromkreis 1.1.1 Stromdichte Die Stromdichte in einem stromdurchflossenen Leiter mit der Querschnittsfläche A ist definiert als: j = di da di da Stromelement 1.1.2 Die
Advanced Motion Control Techniques
 Advanced Motion Control Techniques Dipl. Ing. Jan Braun maxon motor ag Switzerland Dipl. Ing. Alexander Rudolph National Instruments Switzerland Agenda Schematiascher Aufbau Positionsregelkreis Übersicht
Advanced Motion Control Techniques Dipl. Ing. Jan Braun maxon motor ag Switzerland Dipl. Ing. Alexander Rudolph National Instruments Switzerland Agenda Schematiascher Aufbau Positionsregelkreis Übersicht
Elektrische Maschinen und Antriebe
 Andreas Binder Elektrische Maschinen und Antriebe Übungsbuch: n mit Lösungsweg Springe] Inhaltsverzeichnis Inhaltsverzeichnis 1. Grundlagen Energiewandler 1 Magnetischer Eisenkreis 1 A1.2: Ruhinduktion
Andreas Binder Elektrische Maschinen und Antriebe Übungsbuch: n mit Lösungsweg Springe] Inhaltsverzeichnis Inhaltsverzeichnis 1. Grundlagen Energiewandler 1 Magnetischer Eisenkreis 1 A1.2: Ruhinduktion
Einführung in Elektrische Maschinen - Asynchronmaschine. Studenten: Name Vorname Unterschrift. Datum: Sichtvermerk des Dozenten: 3.
 Fachbereich 3 : Informations- und Elektrotechnik Semester: Fach: Dozent: Elektrische Maschinen Prof. Dr. Bernd Aschendorf Datum: Versuch Nr. 6 Thema: Einführung in Elektrische Maschinen - Asynchronmaschine
Fachbereich 3 : Informations- und Elektrotechnik Semester: Fach: Dozent: Elektrische Maschinen Prof. Dr. Bernd Aschendorf Datum: Versuch Nr. 6 Thema: Einführung in Elektrische Maschinen - Asynchronmaschine
4.2 Gleichstromkreise
 4.2 Gleichstromkreise Werden Ladungen transportiert, so fließt ein elektrischer Strom I dq C It () [] I A s dt Einfachster Fall: Gleichstrom; Strom fließt in gleicher ichtung mit konstanter Stärke. I()
4.2 Gleichstromkreise Werden Ladungen transportiert, so fließt ein elektrischer Strom I dq C It () [] I A s dt Einfachster Fall: Gleichstrom; Strom fließt in gleicher ichtung mit konstanter Stärke. I()
Praktikum Automatisierungstechnik
 Prof. Dr.-Ing. Joachim Böcker Praktikum Automatisierungstechnik Versuch Schaltnetzteile (Kurzbezeichnung: SNT) Hinweis: Die Teilnahme am Praktikum wird nur anerkannt, wenn: 1. Die Abgabe der Ausarbeitung
Prof. Dr.-Ing. Joachim Böcker Praktikum Automatisierungstechnik Versuch Schaltnetzteile (Kurzbezeichnung: SNT) Hinweis: Die Teilnahme am Praktikum wird nur anerkannt, wenn: 1. Die Abgabe der Ausarbeitung
Einführung in die Motormesstechnik. Einleitung
 Einleitung Ziel des Laborversuchs ist es, das Zusammenspiel zwischen Verbrennungsmotoren und Leistungsbremsen zu ermitteln und zu dokumentieren. Die Dokumentationen sollen zur späteren Ermittlung der Motorkennlinien
Einleitung Ziel des Laborversuchs ist es, das Zusammenspiel zwischen Verbrennungsmotoren und Leistungsbremsen zu ermitteln und zu dokumentieren. Die Dokumentationen sollen zur späteren Ermittlung der Motorkennlinien
hofer eds GmbH Ein Unternehmen der hofer AG
 Elektromotoren in der mobilen Anwendung VDI-Fachkonferenz Elektromobilität Automobilindustrie trifft Energiewirtschaft Ihr Partner für Energieeffiziente Antriebssysteme hofer eds GmbH Ein Unternehmen der
Elektromotoren in der mobilen Anwendung VDI-Fachkonferenz Elektromobilität Automobilindustrie trifft Energiewirtschaft Ihr Partner für Energieeffiziente Antriebssysteme hofer eds GmbH Ein Unternehmen der
Versuch 15. Wechselstromwiderstände
 Physikalisches Praktikum Versuch 5 Wechselstromwiderstände Name: Christian Köhler Datum der Durchführung: 26.09.2006 Gruppe Mitarbeiter: Henning Hansen Assistent: Thomas Rademacher testiert: 3 Einleitung
Physikalisches Praktikum Versuch 5 Wechselstromwiderstände Name: Christian Köhler Datum der Durchführung: 26.09.2006 Gruppe Mitarbeiter: Henning Hansen Assistent: Thomas Rademacher testiert: 3 Einleitung
Dieses Werk ist copyrightgeschützt und darf in keiner Form vervielfältigt werden noch an Dritte weitergegeben werden. Es gilt nur für den
 1 Einleitung Die Hochspannungsgleichstromübertragung (HGÜ) gewinnt durch die Nutzung regenerativer Energien zunehmend an Bedeutung. Die Yunnan-Guangdong HGÜ in China, welche die Energie aus den Wasserkraftwerken
1 Einleitung Die Hochspannungsgleichstromübertragung (HGÜ) gewinnt durch die Nutzung regenerativer Energien zunehmend an Bedeutung. Die Yunnan-Guangdong HGÜ in China, welche die Energie aus den Wasserkraftwerken
Magnetische Induktion
 Magnetische Induktion 5.3.2.10 In einer langen Spule wird ein Magnetfeld mit variabler Frequenz und veränderlicher Stärke erzeugt. Dünne Spulen werden in der langen Feldspule positioniert. Die dabei in
Magnetische Induktion 5.3.2.10 In einer langen Spule wird ein Magnetfeld mit variabler Frequenz und veränderlicher Stärke erzeugt. Dünne Spulen werden in der langen Feldspule positioniert. Die dabei in
2.1 Ele kt rom agnetis c he. Sc hwingunge n und We lle n. Sc hwingunge n
 2 Ele kt rom agnetis c he Sc hwingunge n und We lle n 2.1 Ele kt rom agnetis c he Sc hwingunge n 2.1.1 Kapazit ive r und indukt ive r Wide rs t and In einem Gleichstromkreis hängt die Stromstärke, sieht
2 Ele kt rom agnetis c he Sc hwingunge n und We lle n 2.1 Ele kt rom agnetis c he Sc hwingunge n 2.1.1 Kapazit ive r und indukt ive r Wide rs t and In einem Gleichstromkreis hängt die Stromstärke, sieht
3. Transformatoren. Elektrische Energietechnik (S8803) Seite 3.1 Transformatoren. 3.1 Allgemeines
 Seite 3.1 Transformatoren. 3.1 Allgemeines") Elektrische Energietechnik (S8803) Seite 3.1 3. 3.1 Allgemeines dienen zur Spannungsumformung von Wechselspannungen. Die wesentliche Anwendung des Transformators finden wir in der Energietechnik. Um die
Elektrische Energietechnik (S8803) Seite 3.1 3. 3.1 Allgemeines dienen zur Spannungsumformung von Wechselspannungen. Die wesentliche Anwendung des Transformators finden wir in der Energietechnik. Um die
Prüfung Sommersemester 2015 Grundlagen der Elektrotechnik Dauer: 90 Minuten
 Prüfung GET Seite 1 von 8 Hochschule München FK 03 Prüfung Sommersemester 2015 Grundlagen der Elektrotechnik Dauer: 90 Minuten F. Palme Zugelassene Hilfsmittel: Taschenrechner, 1 DIN-A4-Blatt Matr.-Nr.:
Prüfung GET Seite 1 von 8 Hochschule München FK 03 Prüfung Sommersemester 2015 Grundlagen der Elektrotechnik Dauer: 90 Minuten F. Palme Zugelassene Hilfsmittel: Taschenrechner, 1 DIN-A4-Blatt Matr.-Nr.:
REGELUNG EINER PMSM (SPARK) FÜR EINE WINDKRAFTANLAGE
 FÜR EINE WINDKRAFTANLAGE") Regelung einer PMSM (SPARK) für eine Windkraftanlage 1 REGELUNG EINER PMSM (SPARK) FÜR EINE WINDKRAFTANLAGE F. Turki 1 EINFÜHRUNG Alternative Stromversorgungen werden immer attraktiver und eine der saubersten
Regelung einer PMSM (SPARK) für eine Windkraftanlage 1 REGELUNG EINER PMSM (SPARK) FÜR EINE WINDKRAFTANLAGE F. Turki 1 EINFÜHRUNG Alternative Stromversorgungen werden immer attraktiver und eine der saubersten
identifiziert e-maschinen das Herz des elektrischen Antriebsstrangs
 identifiziert e-maschinen das Herz des elektrischen Antriebsstrangs Bei der Betrachtung zukünftiger Antriebstechnologien spielt die Elektromobilität eine entscheidende Rolle: Nach und nach verlässt sie
identifiziert e-maschinen das Herz des elektrischen Antriebsstrangs Bei der Betrachtung zukünftiger Antriebstechnologien spielt die Elektromobilität eine entscheidende Rolle: Nach und nach verlässt sie
Spannungsstabilisierung
 Spannungsstabilisierung 28. Januar 2007 Oliver Sieber siebero@phys.ethz.ch 1 Inhaltsverzeichnis 1 Zusammenfassung 4 2 Einführung 4 3 Bau der DC-Spannungsquelle 5 3.1 Halbwellengleichrichter........................
Spannungsstabilisierung 28. Januar 2007 Oliver Sieber siebero@phys.ethz.ch 1 Inhaltsverzeichnis 1 Zusammenfassung 4 2 Einführung 4 3 Bau der DC-Spannungsquelle 5 3.1 Halbwellengleichrichter........................
1. Elektrotechnische Grundlagen
 1. Elektrotechnische Grundlagen Teil 7 Elektrische Maschinen, Motoren Prinzip, Arten, Kennlinien, Anwendungen Georg Strauss --- 09-2009 ET-1-7 09/2009 1 Wiederholung: Grundlagen Drehfeld: Werden drei um
1. Elektrotechnische Grundlagen Teil 7 Elektrische Maschinen, Motoren Prinzip, Arten, Kennlinien, Anwendungen Georg Strauss --- 09-2009 ET-1-7 09/2009 1 Wiederholung: Grundlagen Drehfeld: Werden drei um
Die Integration elektrischer Achsantriebe in Hybrid und Elektrofahrzeuge
 Die Integration elektrischer Achsantriebe in Hybrid und Elektrofahrzeuge 1 Inhalt B Einführung B Topologie eines elektrischen Antriebes B Integrierte elektrische Antriebseinheit B Elektrische Maschinen
Die Integration elektrischer Achsantriebe in Hybrid und Elektrofahrzeuge 1 Inhalt B Einführung B Topologie eines elektrischen Antriebes B Integrierte elektrische Antriebseinheit B Elektrische Maschinen
Übungsaufgaben Elektrotechnik (ab WS2011)
") Flugzeug- Elektrik und Elektronik Prof. Dr. Ing. Günter Schmitz Aufgabe 1 Übungsaufgaben Elektrotechnik (ab WS2011) Gegeben sei eine Zusammenschaltung einiger Widerstände gemäß Bild. Bestimmen Sie den
Flugzeug- Elektrik und Elektronik Prof. Dr. Ing. Günter Schmitz Aufgabe 1 Übungsaufgaben Elektrotechnik (ab WS2011) Gegeben sei eine Zusammenschaltung einiger Widerstände gemäß Bild. Bestimmen Sie den
Einführung Spannungsstabilisierung mit NI Multisim
 Einführung Spannungsstabilisierung mit NI Multisim Inhalt Einführung Spannungsstabilisierung mit NI Multisim... 1 Vorwort... 2 Einführung in NI Multisim... 2 Übersicht über die wichtigsten Bedienelemente
Einführung Spannungsstabilisierung mit NI Multisim Inhalt Einführung Spannungsstabilisierung mit NI Multisim... 1 Vorwort... 2 Einführung in NI Multisim... 2 Übersicht über die wichtigsten Bedienelemente
INHALTSVERZEICHNIS. 10.1. Reihenschaltungen... 66
 INHALTSVERZEICHNIS 8. Einfiig in die Wecbselspainnungstechnik... 13 8.1. Beziehungen zur Gleichspannungstechnik... 13 8.2. Definition der Wechselspannung... 14 8.3. Arten der Wechselspannung... 15 8.3.1.
INHALTSVERZEICHNIS 8. Einfiig in die Wecbselspainnungstechnik... 13 8.1. Beziehungen zur Gleichspannungstechnik... 13 8.2. Definition der Wechselspannung... 14 8.3. Arten der Wechselspannung... 15 8.3.1.
SCHUBSTARKER PM-ERREGTER SYNCHRONER LINEARMOTOR ZUR MASSENBESCHLEUNIGUNG
 Schubstarker PM-erregter synchroner Linearmotor zur Massenbeschleunigung 1 SCHUBSTARKER PM-ERREGTER SYNCHRONER LINEARMOTOR ZUR MASSENBESCHLEUNIGUNG S. O. Siems, J. Meins, C. Deeg, H. Mosebach (Deutsche
Schubstarker PM-erregter synchroner Linearmotor zur Massenbeschleunigung 1 SCHUBSTARKER PM-ERREGTER SYNCHRONER LINEARMOTOR ZUR MASSENBESCHLEUNIGUNG S. O. Siems, J. Meins, C. Deeg, H. Mosebach (Deutsche
A. Ein Kondensator differenziert Spannung
 A. Ein Kondensator differenziert Spannung Wir legen eine Wechselspannung an einen Kondensator wie sieht die sich ergebende Stromstärke aus? U ~ ~ Abb 1: Prinzipschaltung Kondensator: Physiklehrbuch S.
A. Ein Kondensator differenziert Spannung Wir legen eine Wechselspannung an einen Kondensator wie sieht die sich ergebende Stromstärke aus? U ~ ~ Abb 1: Prinzipschaltung Kondensator: Physiklehrbuch S.
Enseignement secondaire technique
 Enseignement secondaire technique Régime technique Division technique générale Cycle supérieur Section technique générale Électrotechnique Classe de 13GE Nombre de leçons: 3.0 Nombre minimal de devoirs:
Enseignement secondaire technique Régime technique Division technique générale Cycle supérieur Section technique générale Électrotechnique Classe de 13GE Nombre de leçons: 3.0 Nombre minimal de devoirs:
Einführung in die Physik
 Einführung in die Physik für Pharmazeuten und Biologen (PPh) Mechanik, Elektrizitätslehre, Optik Klausur: Montag, 11.02. 2008 um 13 16 Uhr (90 min) Willstätter-HS Buchner-HS Nachklausur: Freitag, 18.04.
Einführung in die Physik für Pharmazeuten und Biologen (PPh) Mechanik, Elektrizitätslehre, Optik Klausur: Montag, 11.02. 2008 um 13 16 Uhr (90 min) Willstätter-HS Buchner-HS Nachklausur: Freitag, 18.04.
Dabei ist der differentielle Widerstand, d.h. die Steigung der Geraden für. Fig.1: vereinfachte Diodenkennlinie für eine Si-Diode
 Dioden - Anwendungen vereinfachte Diodenkennlinie Für die meisten Anwendungen von Dioden ist die exakte Berechnung des Diodenstroms nach der Shockley-Gleichung nicht erforderlich. In diesen Fällen kann
Dioden - Anwendungen vereinfachte Diodenkennlinie Für die meisten Anwendungen von Dioden ist die exakte Berechnung des Diodenstroms nach der Shockley-Gleichung nicht erforderlich. In diesen Fällen kann
ELEXBO A-Car-Engineering
 1 Mit dem können auf einfache Weise die Themen: -1 und 3-Phasen-Wechselstrom -Gleichrichtung von Wechselstrom -Transformator -Induktion in der Spule -Eigenschaften eines Gleichstrommotors selbständig und
1 Mit dem können auf einfache Weise die Themen: -1 und 3-Phasen-Wechselstrom -Gleichrichtung von Wechselstrom -Transformator -Induktion in der Spule -Eigenschaften eines Gleichstrommotors selbständig und
Fragebogen Auswahl Schrittmotor-System
 Fragebogen Auswahl Schrittmotor-System Inhaltsverzeichnis 1 Einleitung... 3 2 Anwendung / Anordnung / Konfiguration... 3 3 Abmessungen... 4 4 Umgebung... 4 4.1 Temperatur... 4 5 Mechanische Last... 4 5.1
Fragebogen Auswahl Schrittmotor-System Inhaltsverzeichnis 1 Einleitung... 3 2 Anwendung / Anordnung / Konfiguration... 3 3 Abmessungen... 4 4 Umgebung... 4 4.1 Temperatur... 4 5 Mechanische Last... 4 5.1
Versuch EL-V1: Tiefsetzsteller
 Versuch EL-V1: Tiefsetzsteller Inhaltsverzeichnis 1 Lernziele 2 2 Versuchsinhalt 2 3 Einleitung 3 4 Sicherheitshinweise 3 5 Schaltbild und Bedienhinweise 4 6 Vorbereitungsanleitung 7 7 Versuchsaufgaben
Versuch EL-V1: Tiefsetzsteller Inhaltsverzeichnis 1 Lernziele 2 2 Versuchsinhalt 2 3 Einleitung 3 4 Sicherheitshinweise 3 5 Schaltbild und Bedienhinweise 4 6 Vorbereitungsanleitung 7 7 Versuchsaufgaben
Motorkennlinie messen
 Aktoren kennlinie messen von Roland Steffen 3387259 2004 Aktoren, kennlinie messen Roland Steffen Seite 1/5 Aufgabenstellung: Von einer Elektromotor-Getriebe-Einheit ist eine vollständige kennlinienschar
Aktoren kennlinie messen von Roland Steffen 3387259 2004 Aktoren, kennlinie messen Roland Steffen Seite 1/5 Aufgabenstellung: Von einer Elektromotor-Getriebe-Einheit ist eine vollständige kennlinienschar
Versuchsvorbereitung P1-51
 Versuchsvorbereitung P1-51 Tobias Volkenandt 22. Januar 2006 Im Versuch zu TRANSISTOREN soll weniger die Physik dieses Bauteils erläutern, sondern eher Einblicke in die Anwendung von Transistoren bieten.
Versuchsvorbereitung P1-51 Tobias Volkenandt 22. Januar 2006 Im Versuch zu TRANSISTOREN soll weniger die Physik dieses Bauteils erläutern, sondern eher Einblicke in die Anwendung von Transistoren bieten.
I = I 0 exp. t + U R
 Betrachten wir einen Stromkreis bestehend aus einer Spannungsquelle, einer Spule und einem ohmschen Widerstand, so können wir auf diesen Stromkreis die Maschenregel anwenden: U L di dt = IR 141 Dies ist
Betrachten wir einen Stromkreis bestehend aus einer Spannungsquelle, einer Spule und einem ohmschen Widerstand, so können wir auf diesen Stromkreis die Maschenregel anwenden: U L di dt = IR 141 Dies ist
Elektrotechnische/Elektronische Grundlagen. Lehrpläne. Grundlagen Elektrotechnik
 Elektrotechnische/Elektronische Grundlagen Lehrpläne Grundlagen Elektrotechnik 1. Gleichstromtechnik 1.1 Grundgrößen 1.1.1 Ladung 1.1.1.1 Ladungsbeschreibung 1.1.1.2 Ladungstrennung 1.1.2 Elektrische Spannung
Elektrotechnische/Elektronische Grundlagen Lehrpläne Grundlagen Elektrotechnik 1. Gleichstromtechnik 1.1 Grundgrößen 1.1.1 Ladung 1.1.1.1 Ladungsbeschreibung 1.1.1.2 Ladungstrennung 1.1.2 Elektrische Spannung
Enseignement secondaire technique. ELETE Électrotechnique
 Enseignement secondaire technique Régime technique Division technique générale Section technique générale Cycle supérieur ELETE Électrotechnique 13GE Nombres de leçons : 3h Langue véhiculaire : Allemand
Enseignement secondaire technique Régime technique Division technique générale Section technique générale Cycle supérieur ELETE Électrotechnique 13GE Nombres de leçons : 3h Langue véhiculaire : Allemand
Modul. Elektrotechnik. Grundlagen. Kurs 1
 Berner Fachhochschule BFH Hochschule für Technik und Informatik HTI Fachbereich Elektro- und Kommunikationstechnik EKT Modul Elektrotechnik Grundlagen Kurs 1 Inhaltsverzeichnis und Sachwortregister STR
Berner Fachhochschule BFH Hochschule für Technik und Informatik HTI Fachbereich Elektro- und Kommunikationstechnik EKT Modul Elektrotechnik Grundlagen Kurs 1 Inhaltsverzeichnis und Sachwortregister STR
Kleine Formelsammlung zu Elektronik und Schaltungstechnik
 Kleine Formelsammlung zu Elektronik und Schaltungstechnik Florian Franzmann 21. September 2004 Inhaltsverzeichnis 1 Stromrichtung 4 2 Kondensator 4 2.1 Plattenkondensator...............................
Kleine Formelsammlung zu Elektronik und Schaltungstechnik Florian Franzmann 21. September 2004 Inhaltsverzeichnis 1 Stromrichtung 4 2 Kondensator 4 2.1 Plattenkondensator...............................
Versuch EL-V2: Hochsetzsteller
 Versuch EL-V2: Hochsetzsteller Inhaltsverzeichnis 1 Einleitung 2 2 Voraussetzungen und Lernziele 2 3 Funktionsweise des Hochsetzstellers 3 4 Sicherheitshinweise 4 5 Schaltbild und Bedienhinweise 5 6 Vorbereitungsanleitung
Versuch EL-V2: Hochsetzsteller Inhaltsverzeichnis 1 Einleitung 2 2 Voraussetzungen und Lernziele 2 3 Funktionsweise des Hochsetzstellers 3 4 Sicherheitshinweise 4 5 Schaltbild und Bedienhinweise 5 6 Vorbereitungsanleitung
Motor Generator (AHS 7. Klasse)
") Physikalisches Schulversuchspraktikum Motor Generator 1/12 Übungsdatum: 29.11.2001 Abgabetermin: 06.12.2001 Physikalisches Schulversuchspraktikum Motor Generator (AHS 7. Klasse) Mittendorfer Stephan Matr.
Physikalisches Schulversuchspraktikum Motor Generator 1/12 Übungsdatum: 29.11.2001 Abgabetermin: 06.12.2001 Physikalisches Schulversuchspraktikum Motor Generator (AHS 7. Klasse) Mittendorfer Stephan Matr.
Hilfsblätter zur Vorlesung GRUNDLAGEN DER ELEKTRISCHEN ENERGIETECHNIK
 Hilfsblätter zur Vorlesung GRUNDLAGEN DER ELEKTRISCHEN ENERGIETECHNIK Lehrstuhl für Leistungselektronik und Elektrische Antriebe Prof. Dr.-Ing. Hans-Günter Eckel Diese Hilfsblätter basieren auf einem Skript
Hilfsblätter zur Vorlesung GRUNDLAGEN DER ELEKTRISCHEN ENERGIETECHNIK Lehrstuhl für Leistungselektronik und Elektrische Antriebe Prof. Dr.-Ing. Hans-Günter Eckel Diese Hilfsblätter basieren auf einem Skript