Algorithmen für Geographische Informationssysteme
|
|
|
- Meike Maier
- vor 6 Jahren
- Abrufe
Transkript
1 Algorithmen für Geographische Informationssysteme 8. Vorlesung: 10. Dezember 2012 Jan-Henrik Haunert
2 Map Matching Problemformulierung Gegeben: Das Straßennetz als planar eingebetteter Graph G = V, E Die GPS-Trajektorie als Folge P = p 1, p 2,, p n von Punkten Gesucht: Weg in G, der minimale Distanz zu P hat. Map Matching
3 Hausdorff-Distanz d hdorff P 1, P 2 = max d hdorff P 1, P 2, d hdorff P 2, P 1 mit und d hdorff P 1, P 2 = max d p 1, P 2 p 1 P 1 d p 1, P 2 = min d p 1, p 2 p 2 P 2 P 1 d hdorff P 1, P 2 P 2
4 Fréchet-Distanz Herrchen läuft entlang P 1 ohne jemals umzukehren. Hund läuft entlang P 2 ohne jemals umzukehren. Herrchen und Hund sind über Hundeleine verbunden. Wie lang ist die Hundeleine mindestens? P 2 P 1


5 Fréchet-Distanz Freiraum F ε = s, t 0, m 1 0, n 1 d p 1 s, p 2 t ε d fréchet ε Es gibt einen Pfad von 0,0 nach 1,1 im inneren von F ε, der in beide Richtungen monoton ist. F ε kann in O mn Zeit berechnet werden. P 2 ε P 2 P 1 TODO: Finde zulässigen Pfad in F ε. P 1
6 Fréchet-Distanz Kanten einer Freiraumzelle: B F i,j, BF i,j+1, L F i,j, LF i+1,j
7 Fréchet-Distanz Kanten einer Freiraumzelle: B F i,j, BF i,j+1, L F i,j, LF i+1,j Teile dieser Kanten, die von (0,0) aus erreichbar sind: B R i,j, BR i,j+1, LR i,j, LR i+1,j
8 Fréchet-Distanz Kanten einer Freiraumzelle: B F i,j, BF i,j+1, L F i,j, LF i+1,j R L i,j Teile dieser Kanten, die von (0,0) aus erreichbar sind: B R i,j, BR i,j+1, LR i,j, LR i+1,j B R i,j, L R i,j bekannt B R i,j =
9 Fréchet-Distanz Kanten einer Freiraumzelle: B F i,j, BF i,j+1, L F i,j, LF i+1,j R L i,j R B i,j+1 R L i+1,j Teile dieser Kanten, die von (0,0) aus erreichbar sind: B R i,j, BR i,j+1, LR i,j, LR i+1,j B R i,j = B R i,j, L R i,j bekannt R R B i,j+1, L i+1,j
10 Algorithmus Fréchet-Distanz
11 Algorithmus Fréchet-Distanz
12 Algorithmus Fréchet-Distanz
13 Algorithmus Fréchet-Distanz
14 Algorithmus Fréchet-Distanz
15 Algorithmus Fréchet-Distanz
16 Algorithmus Fréchet-Distanz
17 Algorithmus Fréchet-Distanz
18 Algorithmus Fréchet-Distanz
19 Algorithmus Fréchet-Distanz
20 Algorithmus Fréchet-Distanz
21 Algorithmus Fréchet-Distanz
22 Algorithmus Fréchet-Distanz
23 Algorithmus Fréchet-Distanz
24 Algorithmus Fréchet-Distanz
25 Algorithmus Fréchet-Distanz
26 Algorithmus Fréchet-Distanz
27 Algorithmus Fréchet-Distanz
28 Fréchet-Distanz Berechnung: Löse Entscheidungsproblem: Ist d fréchet ε? P 2 P 1
 P 2 P 1")
29 Fréchet-Distanz Berechnung: Löse Entscheidungsproblem: Ist d fréchet ε? dann parametrische Suche... O mn log mn Zeit (hier ohne Details) P 2 P 1
30 Map Matching Problemformulierung Gegeben: Das Straßennetz als planar eingebetteter Graph G = V, E Die GPS-Trajektorie als Folge P = p 1, p 2,, p n von Punkten Gesucht: Weg in G, der minimale Distanz zu P hat. Map Matching
31 Map Matching Problemformulierung Gegeben: Das Straßennetz als planar eingebetteter Graph G = V, E Die GPS-Trajektorie als Folge P = p 1, p 2,, p n von Punkten Gesucht: Weg in G, der minimale Fréchet-Distanz zu P hat. Map Matching
32 Map Matching Entscheidungsproblem Gegeben: Das Straßennetz als planar eingebetteter Graph G = V, E Die GPS-Trajektorie als Folge P = p 1, p 2,, p n von Punkten Zulässige Distanz ε Gibt es einen Weg in G, dessen Fréchet-Distanz zu P kleiner ist als ε? Map Matching
33 Map Matching Entscheidungsproblem Freiraumdiagramm für zwei Polygonzüge P 2 P 1
34 Map Matching Entscheidungsproblem Freiraumdiagramm für zwei Polygonzüge P 2 Idee: Freiraumdiagramm für Polygonzug und Graph P 1
35 Map Matching Idee: Freiraumdiagramm für Polygonzug und Graph
36 Map Matching Idee: Freiraumdiagramm für Polygonzug und Graph

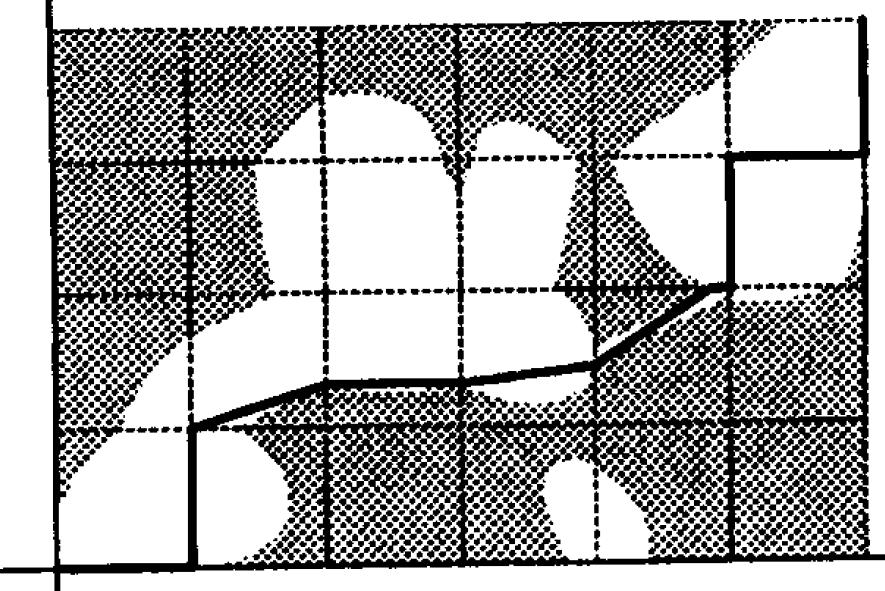
37 Freiraumdiagramm für Polygonzug und eine Kante Map Matching Idee: Freiraumdiagramm für Polygonzug und Graph
38 Map Matching Suche einen zulässigen Pfad von links nach rechts. Idee: Freiraumdiagramm für Polygonzug und Graph
39 Map Matching Suche einen zulässigen Pfad von links nach rechts. Alt et al. 2003: Matching Planar Maps J. Algorithm. Entscheidbar in O E P log E Zeit.
40 Map Matching Finde einen zulässigen Pfad mit minimaler Fréchet-Distanz Alt et al. 2003: Matching Planar Maps J. Algorithm. Lösbar in O E P log E log E P Zeit.
41 Lösbar in O E P log E log E P Zeit. Map Matching Problemformulierung Gegeben: Das Straßennetz als planar eingebetteter Graph G = V, E Die GPS-Trajektorie als Folge P = p 1, p 2,, p n von Punkten Gesucht: Weg in G, der minimale Fréchet-Distanz zu P hat. Map Matching
42 Map Matching Problem: GPS-Punkte der Trajektorie weisen einen relativ großen Abstand zueinander auf. Annahme: Fahrer wählen bevorzugt kürzeste Wege im Straßennetz.
43 Map Matching Problem: GPS-Punkte der Trajektorie weisen einen relativ großen Abstand zueinander auf. Direkte Verbindung zwischen Punkten ist schlechte Näherung Annahme: Fahrer wählen bevorzugt kürzeste Wege im Straßennetz.
44 Map Matching Problem: GPS-Punkte der Trajektorie weisen einen relativ großen Abstand zueinander auf. Ergebnis mit minimaler Fréchet-Distanz Annahme: Fahrer wählen bevorzugt kürzeste Wege im Straßennetz.
45 Map Matching Problem: GPS-Punkte der Trajektorie weisen einen relativ großen Abstand zueinander auf. kürzeste Route Annahme: Fahrer wählen bevorzugt kürzeste Wege im Straßennetz.
46 Map Matching Ansatz über kürzeste Wege Y. Lou, C. Zhang, Y. Zheng, X. Xie, W. Wang, Y. Huang (2009): Map-Matching for Low-Sampling-Rate GPS Trajectories, Proc. ACM GIS 2009, pp P. Newson und J.Krumm. (2009): Hidden Markov Map Matching Through Noise and Sparseness, Proc. ACM GIS 2009, pp J. Eisner, S. Funke, A. Herbsty, A. Spillnery und S. Storandt : Algorithms for Matching and Predicting Trajectories. Proc. ALENEX 2011, pp
47 Map Matching Ansatz über kürzeste Wege Y. Lou, C. Zhang, Y. Zheng, X. Xie, W. Wang, Y. Huang (2009): Map-Matching for Low-Sampling-Rate GPS Trajectories, Proc. ACM GIS 2009, pp P. Newson und J.Krumm. (2009): Hidden Markov Map Matching Through Noise and Sparseness, Proc. ACM GIS 2009, pp J. Eisner, S. Funke, A. Herbsty, A. Spillnery und S. Storandt : Algorithms for Matching and Predicting Trajectories. Proc. ALENEX 2011, pp Ein Punkt etwa alle zwei Minuten (z.b. zur Aufzeichnung & Analyse von Taxirouten)
48 Map Matching Ansatz über kürzeste Wege Y. Lou, C. Zhang, Y. Zheng, X. Xie, W. Wang, Y. Huang (2009): Map-Matching for Low-Sampling-Rate GPS Trajectories, Proc. ACM GIS 2009, pp P. Newson und J.Krumm. (2009): Hidden Markov Map Matching Through Noise and Sparseness, Proc. ACM GIS 2009, pp J. Eisner, S. Funke, A. Herbsty, A. Spillnery und S. Storandt : Algorithms for Matching and Predicting Trajectories. Proc. ALENEX 2011, pp Hidden Markov Modell: Wahrscheinlichkeitstheoretischer Ansatz
49 Hidden Markov Model
50 Hidden Markov Model Gegeben: Beobachtungen O = o 1,..., o n, je eine pro Zeitpunkt mögliche Systemzustände Z für jeden Systemzustand z Z und jede Beobachtung o die Wahrscheinlichkeit Pr(o z) oder die Wahrscheinlichkeitsdichte f (o z), dass o bei Zustand z beobachtet wird für jedes Paar von Zuständen z 1, z 2 Z die Wahrscheinlichkeit Pr(z 2 was z 1 before), also die Wahrscheinlichkeit für z 2 bei Kenntnis, dass zuvor z 1 vorherrschte (Übergangswahrscheinlichkeit) für jeden Zustand z Z die (a-priori-)wahrscheinlichkeit Pr(z)
51 Hidden Markov Model Gegeben: Beobachtungen O = o 1,..., o n, je eine pro Zeitpunkt mögliche Systemzustände Z für jeden Systemzustand z Z und jede Beobachtung o die Wahrscheinlichkeit Pr(o z) oder die Wahrscheinlichkeitsdichte f (o z), dass o bei Zustand z beobachtet wird für jedes Paar von Zuständen z 1, z 2 Z die Wahrscheinlichkeit Pr(z 2 was z 1 before), also die Wahrscheinlichkeit für z 2 bei Kenntnis, dass zuvor z 1 vorherrschte (Übergangswahrscheinlichkeit) für jeden Zustand z Z die (a-priori-)wahrscheinlichkeit Pr(z)
52 Hidden Markov Model Gegeben: Beobachtungen O = o 1,..., o n, je eine pro Zeitpunkt mögliche Systemzustände Z für jeden Systemzustand z Z und jede Beobachtung o die Wahrscheinlichkeit Pr(o z) oder die Wahrscheinlichkeitsdichte f (o z), dass o bei Zustand z beobachtet wird für jedes Paar von Zuständen z 1, z 2 Z die Wahrscheinlichkeit Pr(z 2 was z 1 before), also die Wahrscheinlichkeit für z 2 bei Kenntnis, dass zuvor z 1 vorherrschte (Übergangswahrscheinlichkeit) für jeden Zustand z Z die (a-priori-)wahrscheinlichkeit Pr(z)
53 Hidden Markov Model Gegeben: Beobachtungen O = o 1,..., o n, je eine pro Zeitpunkt mögliche Systemzustände Z für jeden Systemzustand z Z und jede Beobachtung o die Wahrscheinlichkeit Pr(o z) oder die Wahrscheinlichkeitsdichte f (o z), dass o bei Zustand z beobachtet wird für jedes Paar von Zuständen z 1, z 2 Z die Wahrscheinlichkeit Pr(z 2 was z 1 before), also die Wahrscheinlichkeit für z 2 bei Kenntnis, dass zuvor z 1 vorherrschte (Übergangswahrscheinlichkeit) für jeden Zustand z Z die (a-priori-)wahrscheinlichkeit Pr(z)
54 Hidden Markov Model Gegeben: Beobachtungen O = o 1,..., o n, je eine pro Zeitpunkt mögliche Systemzustände Z für jeden Systemzustand z Z und jede Beobachtung o die Wahrscheinlichkeit Pr(o z) oder die Wahrscheinlichkeitsdichte f (o z), dass o bei Zustand z beobachtet wird für jedes Paar von Zuständen z 1, z 2 Z die Wahrscheinlichkeit Pr(z 2 was z 1 before), also die Wahrscheinlichkeit für z 2 bei Kenntnis, dass zuvor z 1 vorherrschte (Übergangswahrscheinlichkeit) für jeden Zustand z Z die (a-priori-)wahrscheinlichkeit Pr(z)
55 Hidden Markov Model Gesucht: Folge S = z 1,..., z n von Zuständen, die sich am besten mit gegebenen Beobachtungen erklären lässt, also Pr(S O) maximimiert. Pr(S O) = f (O S) Pr(S)/f (O)
56 Hidden Markov Model Gesucht: Folge S = z 1,..., z n von Zuständen, die sich am besten mit gegebenen Beobachtungen erklären lässt, also Pr(S O) maximimiert. Pr(S O) = f (O S) Pr(S)/f (O)
57 Hidden Markov Model Gesucht: Folge S = z 1,..., z n von Zuständen, die sich am besten mit gegebenen Beobachtungen erklären lässt, also Pr(S O) maximimiert. Pr(S O) = f (O S) Pr(S)/f (O) f (O S) = f (o 1 z 1 )... f (o n z n )
58 Hidden Markov Model Gesucht: Folge S = z 1,..., z n von Zuständen, die sich am besten mit gegebenen Beobachtungen erklären lässt, also Pr(S O) maximimiert. Pr(S O) = f (O S) Pr(S)/f (O) Pr(S) = Pr(z 1 ) Pr(z 2 was z 1 before)... Pr(z n was z n 1 before)
59 Hidden Markov Model f (o 1 z 0 1 ) Pr(z0 2 was z0 1 before) f (o 2 z 0 2 ) Pr(z0 3 was z0 2 before) z 0 1 z 0 2 z 0 3 Pr(z 0 1 ) f (o 3 z 0 3 ) s z 1 1 z 1 2 z 1 3 t Z 1 Z 2 Z 3 z 2 1 z 2 2 z 2 3
60 Hidden Markov Model f (o 1 z 0 1 ) Pr(z0 2 was z0 1 before) f (o 2 z 0 2 ) Pr(z0 3 was z0 2 before) Pr(z 0 1 ) z1 0 z2 0 z3 0 s-t-path of maximum weight product f (o 3 z 0 3 ) = state sequence S that maximizes Pr (S O) s z 1 1 z 1 2 z 1 3 t Z 1 Z 2 Z 3 z 2 1 z 2 2 z 2 3
Algorithmen für Geographische Informationssysteme
 Algorithmen für Geographische Informationssysteme 3. Vorlesung: 23. April 2014 Thomas van Dijk basiert auf Folien von Jan-Henrik Haunert Map Matching Problemformulierung Gegeben: Das Straßennetz als planar
Algorithmen für Geographische Informationssysteme 3. Vorlesung: 23. April 2014 Thomas van Dijk basiert auf Folien von Jan-Henrik Haunert Map Matching Problemformulierung Gegeben: Das Straßennetz als planar
Algorithmen für Geographische Informationssysteme
 Algorithmen für Geographische Informationssysteme 3. Vorlesung: 29. April 205 Thomas van Dijk basiert auf Folien von Jan-Henrik Haunert Map Matching Problemformulierung Gegeben: Das Straßennetz als planar
Algorithmen für Geographische Informationssysteme 3. Vorlesung: 29. April 205 Thomas van Dijk basiert auf Folien von Jan-Henrik Haunert Map Matching Problemformulierung Gegeben: Das Straßennetz als planar
Algorithmen für Geographische Informationssysteme
 Algorithmen für Geographische Informationssysteme 2. Vorlesung: 16. April 2014 Thomas van Dijk basiert auf Folien von Jan-Henrik Haunert Map Matching? Map Matching! Map Matching...als Teil von Fahrzeugnavigationssystemen
Algorithmen für Geographische Informationssysteme 2. Vorlesung: 16. April 2014 Thomas van Dijk basiert auf Folien von Jan-Henrik Haunert Map Matching? Map Matching! Map Matching...als Teil von Fahrzeugnavigationssystemen
Map Matching. Problem: GPS-Punkte der Trajektorie weisen einen relativ großen Abstand zueinander auf.
 Map Matching Problem: GPS-Punkte der Trajektorie weisen einen relativ großen Abstand zueinander auf. Ergebnis mit minimaler Fréchet-Distanz Annahme: Fahrer wählen bevorzugt kürzeste Wege im Straßennetz.
Map Matching Problem: GPS-Punkte der Trajektorie weisen einen relativ großen Abstand zueinander auf. Ergebnis mit minimaler Fréchet-Distanz Annahme: Fahrer wählen bevorzugt kürzeste Wege im Straßennetz.
Hidden Markov Model ein Beispiel
 Hidden Markov Model ein Beispiel Gegeben: Folge von Beobachtungen O = o 1,..., o n = nass, nass, trocken, nass, trocken Menge möglicher Systemzustände: Z = {Sonne, Regen} Beobachtungswahrscheinlichkeiten:
Hidden Markov Model ein Beispiel Gegeben: Folge von Beobachtungen O = o 1,..., o n = nass, nass, trocken, nass, trocken Menge möglicher Systemzustände: Z = {Sonne, Regen} Beobachtungswahrscheinlichkeiten:
HOCHSCHULE FÜR TECHNIK, WIRTSCHAFT UND KULTUR LEIPZIG University of Applied Sciences. Curve Matching. Leonie Bruckert
 HOCHSCHULE FÜR TECHNIK, WIRTSCHAFT UND KULTUR LEIPZIG Curve Matching www.htwk-leipzig.de Leonie Bruckert Leipzig, 24.06.2014 map matching: Anwendungsbeispiel Problem: Route eines Fahrzeugs im Straßennetz
HOCHSCHULE FÜR TECHNIK, WIRTSCHAFT UND KULTUR LEIPZIG Curve Matching www.htwk-leipzig.de Leonie Bruckert Leipzig, 24.06.2014 map matching: Anwendungsbeispiel Problem: Route eines Fahrzeugs im Straßennetz
Hidden Markov Model. Gegeben: Beobachtungen O = o 1,..., o n, je eine pro Zeitpunkt
 Hidden Markov Model Hidden Markov Model Gegeben: Beobachungen O = o,..., o n, je eine pro Zeipunk mögliche Syemzuände Z für jeden Syemzuand z Z und jede Beobachung o die Wahrcheinlichkei Pr(o z) oder die
Hidden Markov Model Hidden Markov Model Gegeben: Beobachungen O = o,..., o n, je eine pro Zeipunk mögliche Syemzuände Z für jeden Syemzuand z Z und jede Beobachung o die Wahrcheinlichkei Pr(o z) oder die
Entwicklung eines Map-Matching- Algorithmus zur Ortung von Fahrzeugen in Stadtgebieten
 11. Vermessungsingenieurtag - Ein Map-Matching-Algorithmus Entwicklung eines Map-Matching- Algorithmus zur Ortung von Fahrzeugen in Stadtgebieten Prof. Dr. Paul Rawiel HFT Stuttgart auf Basis der Bachelor-Arbeit
11. Vermessungsingenieurtag - Ein Map-Matching-Algorithmus Entwicklung eines Map-Matching- Algorithmus zur Ortung von Fahrzeugen in Stadtgebieten Prof. Dr. Paul Rawiel HFT Stuttgart auf Basis der Bachelor-Arbeit
Maximale s t-flüsse in Planaren Graphen
 Maximale s t-flüsse in Planaren Graphen Vorlesung Algorithmen für planare Graphen June 18, 2012 Ignaz Rutter INSTITUT FÜR THEORETISCHE INFORMATIK PROF. DR. DOROTHEA WAGNER KIT Universität des Landes Baden-Württemberg
Maximale s t-flüsse in Planaren Graphen Vorlesung Algorithmen für planare Graphen June 18, 2012 Ignaz Rutter INSTITUT FÜR THEORETISCHE INFORMATIK PROF. DR. DOROTHEA WAGNER KIT Universität des Landes Baden-Württemberg
2. Das single-source-shortest-path-problem
 . Das single-source-shortest-path-problem Zunächst nehmen wir an, dass d 0 ist. Alle kürzesten Pfade von a nach b sind o.b.d.a. einfache Pfade.. Dijkstra s Algorithmus Gegeben: G = (V, A), (A = V V ),
. Das single-source-shortest-path-problem Zunächst nehmen wir an, dass d 0 ist. Alle kürzesten Pfade von a nach b sind o.b.d.a. einfache Pfade.. Dijkstra s Algorithmus Gegeben: G = (V, A), (A = V V ),
Satz 324 Sei M wie oben. Dann gibt es für ein geeignetes k Konstanten c i > 0 und Permutationsmatrizen P i, i = 1,...
 Satz 324 Sei M wie oben. Dann gibt es für ein geeignetes k Konstanten c i > 0 und Permutationsmatrizen P i, i = 1,..., k, so dass gilt M = k c i P i i=1 k c i = r. i=1 Diskrete Strukturen 7.1 Matchings
Satz 324 Sei M wie oben. Dann gibt es für ein geeignetes k Konstanten c i > 0 und Permutationsmatrizen P i, i = 1,..., k, so dass gilt M = k c i P i i=1 k c i = r. i=1 Diskrete Strukturen 7.1 Matchings
Algorithmen & Komplexität
 Algorithmen & Komplexität Angelika Steger Institut für Theoretische Informatik steger@inf.ethz.ch Kürzeste Pfade Problem Gegeben Netzwerk: Graph G = (V, E), Gewichtsfunktion w: E N Zwei Knoten: s, t Kantenzug/Weg
Algorithmen & Komplexität Angelika Steger Institut für Theoretische Informatik steger@inf.ethz.ch Kürzeste Pfade Problem Gegeben Netzwerk: Graph G = (V, E), Gewichtsfunktion w: E N Zwei Knoten: s, t Kantenzug/Weg
Theoretische Informatik 1
 Theoretische Informatik 1 Approximierbarkeit David Kappel Institut für Grundlagen der Informationsverarbeitung Technische Universität Graz 10.06.2016 Übersicht Das Problem des Handelsreisenden TSP EUCLIDEAN-TSP
Theoretische Informatik 1 Approximierbarkeit David Kappel Institut für Grundlagen der Informationsverarbeitung Technische Universität Graz 10.06.2016 Übersicht Das Problem des Handelsreisenden TSP EUCLIDEAN-TSP
Informatik II, SS 2014
 Informatik II SS 2014 (Algorithmen & Datenstrukturen) Vorlesung 20 (23.7.2014) All Pairs Shortest Paths, String Matching (Textsuche) Algorithmen und Komplexität Vorlesungsevaluation Sie sollten alle eine
Informatik II SS 2014 (Algorithmen & Datenstrukturen) Vorlesung 20 (23.7.2014) All Pairs Shortest Paths, String Matching (Textsuche) Algorithmen und Komplexität Vorlesungsevaluation Sie sollten alle eine
Theoretische Informatik 1
 Theoretische Informatik 1 Approximierbarkeit David Kappel Institut für Grundlagen der Informationsverarbeitung Technische Universität Graz 02.07.2015 Übersicht Das Problem des Handelsreisenden TSP EUCLIDEAN-TSP
Theoretische Informatik 1 Approximierbarkeit David Kappel Institut für Grundlagen der Informationsverarbeitung Technische Universität Graz 02.07.2015 Übersicht Das Problem des Handelsreisenden TSP EUCLIDEAN-TSP
Anwendungen dynamischer Programmierung in der Biologie
 Anwendungen dynamischer Programmierung in der Biologie Überblick Algorithmus zum Finden der wahrscheinlichsten Sekundärstruktur eines RNS Moleküls Sequence Alignment Verbesserung von Sequence Alignment
Anwendungen dynamischer Programmierung in der Biologie Überblick Algorithmus zum Finden der wahrscheinlichsten Sekundärstruktur eines RNS Moleküls Sequence Alignment Verbesserung von Sequence Alignment
Maximale s t-flüsse in Planaren Graphen
 Maximale s t-flüsse in Planaren Graphen Vorlesung Algorithmen für planare Graphen 6. Juni 2017 Guido Brückner INSTITUT FÜR THEORETISCHE INFORMATIK PROF. DR. DOROTHEA WAGNER KIT Universität des Landes Baden-Württemberg
Maximale s t-flüsse in Planaren Graphen Vorlesung Algorithmen für planare Graphen 6. Juni 2017 Guido Brückner INSTITUT FÜR THEORETISCHE INFORMATIK PROF. DR. DOROTHEA WAGNER KIT Universität des Landes Baden-Württemberg
2. Entsprechende Listen P i von Vorgängern von i 3. for i := 1 to n do. (ii) S i = Knoten 2 + 1}
 S i = Knoten 2 + 1}") 1. Berechne für jeden Knoten i in BFS-Art eine Liste S i von von i aus erreichbaren Knoten, so dass (i) oder (ii) gilt: (i) S i < n 2 + 1 und Si enthält alle von i aus erreichbaren Knoten (ii) S i = n
1. Berechne für jeden Knoten i in BFS-Art eine Liste S i von von i aus erreichbaren Knoten, so dass (i) oder (ii) gilt: (i) S i < n 2 + 1 und Si enthält alle von i aus erreichbaren Knoten (ii) S i = n
Berechnung von Abständen
 3. Kreis- und Wegeprobleme Abstände in Graphen Abstände in Graphen Definition 3.4. Es sei G = (V, E) ein Graph. Der Abstand d(v, w) zweier Knoten v, w V ist die minimale Länge eines Weges von v nach w.
3. Kreis- und Wegeprobleme Abstände in Graphen Abstände in Graphen Definition 3.4. Es sei G = (V, E) ein Graph. Der Abstand d(v, w) zweier Knoten v, w V ist die minimale Länge eines Weges von v nach w.
Lernmodul 7 Algorithmus von Dijkstra
 Folie 1 von 30 Lernmodul 7 Algorithmus von Dijkstra Quelle: http://www.map24.de Folie 2 von 30 Algorithmus von Dijkstra Übersicht Kürzester Weg von A nach B in einem Graphen Problemstellung: Suche einer
Folie 1 von 30 Lernmodul 7 Algorithmus von Dijkstra Quelle: http://www.map24.de Folie 2 von 30 Algorithmus von Dijkstra Übersicht Kürzester Weg von A nach B in einem Graphen Problemstellung: Suche einer
1 Pfade in azyklischen Graphen
 Praktikum Algorithmen-Entwurf (Teil 5) 17.11.2008 1 1 Pfade in azyklischen Graphen Sei wieder ein gerichteter Graph mit Kantengewichten gegeben, der diesmal aber keine Kreise enthält, also azyklisch ist.
Praktikum Algorithmen-Entwurf (Teil 5) 17.11.2008 1 1 Pfade in azyklischen Graphen Sei wieder ein gerichteter Graph mit Kantengewichten gegeben, der diesmal aber keine Kreise enthält, also azyklisch ist.
Wenn wir zudem a ii = 1 für 1 i n setzen, dann gilt für A k (boolesches Produkt, A 0 = I) 0 falls es im Graphen keinen Pfad von v i nach v j,
 0 falls es im Graphen keinen Pfad von v i nach v j,") 6.2 Boolesche Matrixmultiplikation und Transitive Hülle Wir ersetzen nun im vorhergehenden Abschnitt die Distanzmatrix durch die (boolesche) Adjazenzmatrix und (min, +) durch (, ), d.h.: n C = A B; c ij
6.2 Boolesche Matrixmultiplikation und Transitive Hülle Wir ersetzen nun im vorhergehenden Abschnitt die Distanzmatrix durch die (boolesche) Adjazenzmatrix und (min, +) durch (, ), d.h.: n C = A B; c ij
Zeitreihenanalyse mit Hidden Markov Modellen
 Elektrotechnik und Informationstechnik Institut für Automatisierungstechnik, Professur Prozessleittechnik Zeitreihenanalyse mit Hidden Markov Modellen (nach http://www.cs.cmu.edu/~awm/tutorials VL PLT2
Elektrotechnik und Informationstechnik Institut für Automatisierungstechnik, Professur Prozessleittechnik Zeitreihenanalyse mit Hidden Markov Modellen (nach http://www.cs.cmu.edu/~awm/tutorials VL PLT2
Hidden-Markov-Modelle
 Universität Potsdam Institut für Informatik Lehrstuhl Maschinelles Lernen Hidden-Markov-Modelle Tobias Scheffer Thomas Vanck Hidden-Markov-Modelle: Wozu? Spracherkennung: Akustisches Modell. Geschriebene
Universität Potsdam Institut für Informatik Lehrstuhl Maschinelles Lernen Hidden-Markov-Modelle Tobias Scheffer Thomas Vanck Hidden-Markov-Modelle: Wozu? Spracherkennung: Akustisches Modell. Geschriebene
Vorlesung Datenstrukturen
 Vorlesung Datenstrukturen Kürzeste Wege Maike Buchin 4. und 6.7.2017 Einführung Motivation: Bestimmung von kürzesten Wegen ist in vielen Anwendungen, z.b. Routenplanung, ein wichtiges Problem. Allgemeine
Vorlesung Datenstrukturen Kürzeste Wege Maike Buchin 4. und 6.7.2017 Einführung Motivation: Bestimmung von kürzesten Wegen ist in vielen Anwendungen, z.b. Routenplanung, ein wichtiges Problem. Allgemeine
Richtig oder falsch? Richtig oder falsch? Richtig oder falsch? Mit dynamischer Programmierung ist das Knapsack- Problem in Polynomialzeit lösbar.
 Gegeben sei ein Netzwerk N = (V, A, c, s, t) wie in der Vorlesung. Ein maximaler s-t-fluss kann immer mit Hilfe einer Folge von höchstens A Augmentationsschritten gefunden werden. Wendet man den Dijkstra-Algorithmus
Gegeben sei ein Netzwerk N = (V, A, c, s, t) wie in der Vorlesung. Ein maximaler s-t-fluss kann immer mit Hilfe einer Folge von höchstens A Augmentationsschritten gefunden werden. Wendet man den Dijkstra-Algorithmus
Routing A lgorithmen Algorithmen Begriffe, Definitionen Wegewahl Verkehrslenkung
 Begriffe, Definitionen Routing (aus der Informatik) Wegewahl oder Verkehrslenkung bezeichnet in der Telekommunikation das Festlegen von Wegen für Nachrichtenströme bei der Nachrichtenübermittlung über
Begriffe, Definitionen Routing (aus der Informatik) Wegewahl oder Verkehrslenkung bezeichnet in der Telekommunikation das Festlegen von Wegen für Nachrichtenströme bei der Nachrichtenübermittlung über
Approximierbarkeit. Definition. Ein Optimierungsproblem P ist gegeben durch ein Quadrupel. P = (I, Sol, m, goal), wobei:
, wobei:") Approximierbarkeit Ein Optimierungsproblem P ist gegeben durch ein Quadrupel wobei: P = (I, Sol, m, goal), I ist die Menge der Instanzen von P. Sol ist eine Funktion, die ein x I abbildet auf die Menge
Approximierbarkeit Ein Optimierungsproblem P ist gegeben durch ein Quadrupel wobei: P = (I, Sol, m, goal), I ist die Menge der Instanzen von P. Sol ist eine Funktion, die ein x I abbildet auf die Menge
16. All Pairs Shortest Path (ASPS)
") . All Pairs Shortest Path (ASPS) All Pairs Shortest Path (APSP): Eingabe: Gewichteter Graph G=(V,E) Ausgabe: Für jedes Paar von Knoten u,v V die Distanz von u nach v sowie einen kürzesten Weg a b c d e
. All Pairs Shortest Path (ASPS) All Pairs Shortest Path (APSP): Eingabe: Gewichteter Graph G=(V,E) Ausgabe: Für jedes Paar von Knoten u,v V die Distanz von u nach v sowie einen kürzesten Weg a b c d e
8.4 Digraphen mit negativen Kantengewichten Grundsätzliches Betrachte Startknoten s und einen Kreis C mit Gesamtlänge < 0.
 8.4 Digraphen mit negativen Kantengewichten 8.4.1 Grundsätzliches Betrachte Startknoten s und einen Kreis C mit Gesamtlänge < 0. k 4 5 1 s 1 3 2 C k 0 k 3 1 1 1 k 1 k 2 v Sollte ein Pfad von s nach C und
8.4 Digraphen mit negativen Kantengewichten 8.4.1 Grundsätzliches Betrachte Startknoten s und einen Kreis C mit Gesamtlänge < 0. k 4 5 1 s 1 3 2 C k 0 k 3 1 1 1 k 1 k 2 v Sollte ein Pfad von s nach C und
Laufzeit. Finden eines Matchings maximaler Kardinalität dauert nur O( E min{ V 1, V 2 }) mit der Ford Fulkerson Methode.
 mit der Ford Fulkerson Methode.") Effiziente Algorithmen Flußprobleme 81 Laufzeit Finden eines Matchings maximaler Kardinalität dauert nur O( E min{ V 1, V 2 }) mit der Ford Fulkerson Methode. Der Fluß ist höchstens f = min{ V 1, V 2 }.
Effiziente Algorithmen Flußprobleme 81 Laufzeit Finden eines Matchings maximaler Kardinalität dauert nur O( E min{ V 1, V 2 }) mit der Ford Fulkerson Methode. Der Fluß ist höchstens f = min{ V 1, V 2 }.
Algorithmen für schwierige Probleme
 Algorithmen für schwierige Probleme Britta Dorn Wintersemester 2011/12 24. November 2011 Farbkodierung Beispiel Longest Path Longest Path gegeben: G = (V, E) und k N. Frage: Gibt es einen einfachen Pfad
Algorithmen für schwierige Probleme Britta Dorn Wintersemester 2011/12 24. November 2011 Farbkodierung Beispiel Longest Path Longest Path gegeben: G = (V, E) und k N. Frage: Gibt es einen einfachen Pfad
Vorlesung Maschinelles Lernen
 Vorlesung Maschinelles Lernen Strukturelle Modelle Conditional Random Fields Katharina Morik LS 8 Informatik Technische Universität Dortmund 17.12. 2013 1 von 27 Gliederung 1 Einführung 2 HMM 3 CRF Strukturen
Vorlesung Maschinelles Lernen Strukturelle Modelle Conditional Random Fields Katharina Morik LS 8 Informatik Technische Universität Dortmund 17.12. 2013 1 von 27 Gliederung 1 Einführung 2 HMM 3 CRF Strukturen
Randomisierte Algorithmen
 Randomisierte Algorithmen Randomisierte Algorithmen Thomas Worsch Fakultät für Informatik Karlsruher Institut für Technologie Wintersemester 2018/2019 1 / 25 Überblick Überblick Metropolis-Algorithmus
Randomisierte Algorithmen Randomisierte Algorithmen Thomas Worsch Fakultät für Informatik Karlsruher Institut für Technologie Wintersemester 2018/2019 1 / 25 Überblick Überblick Metropolis-Algorithmus
Zählen perfekter Matchings in planaren Graphen
 Zählen perfekter Matchings in planaren Graphen Kathlén Kohn Institut für Mathematik Universität Paderborn 25. Mai 2012 Inhaltsverzeichnis Motivation Einführung in Graphentheorie Zählen perfekter Matchings
Zählen perfekter Matchings in planaren Graphen Kathlén Kohn Institut für Mathematik Universität Paderborn 25. Mai 2012 Inhaltsverzeichnis Motivation Einführung in Graphentheorie Zählen perfekter Matchings
Algorithmische Graphentheorie
 1 Algorithmische Graphentheorie Sommersemester 2014 5. Vorlesung Matchings / Paarungen II Kombinatorischer Algorithmus, Anwendung für Handlungsreisende, LP-Runden Dr. Joachim Spoerhase Prof. Dr. Alexander
1 Algorithmische Graphentheorie Sommersemester 2014 5. Vorlesung Matchings / Paarungen II Kombinatorischer Algorithmus, Anwendung für Handlungsreisende, LP-Runden Dr. Joachim Spoerhase Prof. Dr. Alexander
Algorithmen II Vorlesung am
 Algorithmen II Vorlesung am..03 Randomisierte Algorithmen INSTITUT FÜR THEORETISCHE INFORMATIK PROF. DR. DOROTHEA WAGNER KIT Universität des Landes Baden-Württemberg und Algorithmen nationales Forschungszentrum
Algorithmen II Vorlesung am..03 Randomisierte Algorithmen INSTITUT FÜR THEORETISCHE INFORMATIK PROF. DR. DOROTHEA WAGNER KIT Universität des Landes Baden-Württemberg und Algorithmen nationales Forschungszentrum
Kürzeste und Schnellste Wege
 Kürzeste und Schnellste Wege Wie funktionieren Navis? André Nusser (Folien inspiriert von Kurt Mehlhorn) Struktur Straßennetzwerke Naiver Algorithmus Dijkstras Algorithmus Transitknoten Nachbemerkungen
Kürzeste und Schnellste Wege Wie funktionieren Navis? André Nusser (Folien inspiriert von Kurt Mehlhorn) Struktur Straßennetzwerke Naiver Algorithmus Dijkstras Algorithmus Transitknoten Nachbemerkungen
Theoretische Grundlagen der Informatik
 Theoretische Grundlagen der Informatik Vorlesung am 20. November 2014 INSTITUT FÜR THEORETISCHE 0 KIT 20.11.2014 Universität des Dorothea Landes Baden-Württemberg Wagner - Theoretische und Grundlagen der
Theoretische Grundlagen der Informatik Vorlesung am 20. November 2014 INSTITUT FÜR THEORETISCHE 0 KIT 20.11.2014 Universität des Dorothea Landes Baden-Württemberg Wagner - Theoretische und Grundlagen der
Strukturelle SVM zum Graph-labelling
 23. Juni 2009 1 Was wir gerne hätten...... und der Weg dorthin Erinnerung: strukturelle SVM 2 Junction Tree Algorithmus Loopy Belief Propagation Gibbs Sampling 3 Umfang Qualität der Algorithmen Schlussfolgerungen
23. Juni 2009 1 Was wir gerne hätten...... und der Weg dorthin Erinnerung: strukturelle SVM 2 Junction Tree Algorithmus Loopy Belief Propagation Gibbs Sampling 3 Umfang Qualität der Algorithmen Schlussfolgerungen
Vorlesung 2 KÜRZESTE WEGE
 Vorlesung 2 KÜRZESTE WEGE 34 Kürzeste Wege im Graphen Motivation! Heute:! Kürzeste Wege von einem Knoten (SSSP)! Kürzeste Wege zwischen allen Knotenpaaren (APSP)! Viele Anwendungen:! Navigationssysteme!
Vorlesung 2 KÜRZESTE WEGE 34 Kürzeste Wege im Graphen Motivation! Heute:! Kürzeste Wege von einem Knoten (SSSP)! Kürzeste Wege zwischen allen Knotenpaaren (APSP)! Viele Anwendungen:! Navigationssysteme!
Kapitel 7: Flüsse in Netzwerken und Anwendungen Gliederung der Vorlesung
 Gliederung der Vorlesung. Fallstudie Bipartite Graphen. Grundbegriffe. Elementare Graphalgorithmen und Anwendungen. Minimal spannende Bäume. Kürzeste Pfade. Traveling Salesman Problem. Flüsse in Netzwerken
Gliederung der Vorlesung. Fallstudie Bipartite Graphen. Grundbegriffe. Elementare Graphalgorithmen und Anwendungen. Minimal spannende Bäume. Kürzeste Pfade. Traveling Salesman Problem. Flüsse in Netzwerken
Hidden Markov Modellen
 Elektrotechnik und Informationstechnik Institut für Automatisierungstechnik, Professur Prozessleittechnik Zeitreihenanalyse mit Hidden Markov Modellen (nach http://www.cs.cmu.edu/~awm/tutorials) VL PLT2
Elektrotechnik und Informationstechnik Institut für Automatisierungstechnik, Professur Prozessleittechnik Zeitreihenanalyse mit Hidden Markov Modellen (nach http://www.cs.cmu.edu/~awm/tutorials) VL PLT2
Kombinatorische Optimierung
 Juniorprof. Dr. Henning Meyerhenke 1 Henning Meyerhenke: KIT Universität des Landes Baden-Württemberg und nationales Forschungszentrum in der Helmholtz-Gemeinschaft www.kit.edu Vorlesung 3 Programm des
Juniorprof. Dr. Henning Meyerhenke 1 Henning Meyerhenke: KIT Universität des Landes Baden-Württemberg und nationales Forschungszentrum in der Helmholtz-Gemeinschaft www.kit.edu Vorlesung 3 Programm des
Kombinatorische Optimierung
 Juniorprof. Dr. Henning Meyerhenke 1 Henning Meyerhenke: KIT Universität des Landes Baden-Württemberg und nationales Forschungszentrum in der Helmholtz-Gemeinschaft www.kit.edu Vorlesung 4 Programm des
Juniorprof. Dr. Henning Meyerhenke 1 Henning Meyerhenke: KIT Universität des Landes Baden-Württemberg und nationales Forschungszentrum in der Helmholtz-Gemeinschaft www.kit.edu Vorlesung 4 Programm des
Bipartites Matching. Gegeben: Ein bipartiter, ungerichteter Graph (V 1, V 2, E). Gesucht: Ein Matching (Paarung) maximaler Kardinalität.
. Gesucht: Ein Matching (Paarung) maximaler Kardinalität.") Netzwerkalgorithmen Bipartites Matching (Folie 90, Seite 80 im Skript) Gegeben: Ein bipartiter, ungerichteter Graph (V, V, E). Gesucht: Ein Matching (Paarung) maximaler Kardinalität. Ein Matching ist eine
Netzwerkalgorithmen Bipartites Matching (Folie 90, Seite 80 im Skript) Gegeben: Ein bipartiter, ungerichteter Graph (V, V, E). Gesucht: Ein Matching (Paarung) maximaler Kardinalität. Ein Matching ist eine
Codes on Graphs: Normal Realizations
 Codes on Graphs: Normal Realizations Autor: G. David Forney, Jr. Seminarvortrag von Madeleine Leidheiser und Melanie Reuter Inhaltsverzeichnis Einführung Motivation Einleitung Graphendarstellungen Trellis
Codes on Graphs: Normal Realizations Autor: G. David Forney, Jr. Seminarvortrag von Madeleine Leidheiser und Melanie Reuter Inhaltsverzeichnis Einführung Motivation Einleitung Graphendarstellungen Trellis
Fortgeschrittene Netzwerk- und Graph-Algorithmen
 Fortgeschrittene Netzwerk- und Graph-Algorithmen Prof. Dr. Hanjo Täubig Lehrstuhl für Effiziente Algorithmen (Prof. Dr. Ernst W. Mayr) Institut für Informatik Technische Universität München Wintersemester
Fortgeschrittene Netzwerk- und Graph-Algorithmen Prof. Dr. Hanjo Täubig Lehrstuhl für Effiziente Algorithmen (Prof. Dr. Ernst W. Mayr) Institut für Informatik Technische Universität München Wintersemester
Seminar Algorithmen für planare Graphen
 Seminar Algorithmen für planare Graphen Reinhard Bauer, Marcus Krug, Ignaz Rutter, Dorothea Wagner Universität Karlsruhe (TH) Institut für Theoretische Informatik Lehrstuhl Algorithmik I 24. Oktober 2008
Seminar Algorithmen für planare Graphen Reinhard Bauer, Marcus Krug, Ignaz Rutter, Dorothea Wagner Universität Karlsruhe (TH) Institut für Theoretische Informatik Lehrstuhl Algorithmik I 24. Oktober 2008
4. Kreis- und Wegeprobleme Abstände in Graphen
 4. Kreis- und Wegeprobleme Abstände in Graphen Abstände in Graphen Definition 4.4. Es sei G = (V,E) ein Graph. Der Abstand d(v,w) zweier Knoten v,w V ist die minimale Länge eines Weges von v nach w. Falls
4. Kreis- und Wegeprobleme Abstände in Graphen Abstände in Graphen Definition 4.4. Es sei G = (V,E) ein Graph. Der Abstand d(v,w) zweier Knoten v,w V ist die minimale Länge eines Weges von v nach w. Falls
Personalisierte Routenplanung
 Personalisierte Routenplanung Vorlesung Routenplanung, KIT, 2016 Sabine Storandt, JMU Würzburg Motivation Viele Kriterien definieren die optimale Route von A nach B. Distanz Reisezeit Benzinverbrauch Staugefahr
Personalisierte Routenplanung Vorlesung Routenplanung, KIT, 2016 Sabine Storandt, JMU Würzburg Motivation Viele Kriterien definieren die optimale Route von A nach B. Distanz Reisezeit Benzinverbrauch Staugefahr
Informatik II, SS 2016
 Informatik II - SS 2016 (Algorithmen & Datenstrukturen) Vorlesung 21 (15.7.2016) String Matching (Textsuche) Approximate String Matching Algorithmen und Komplexität Textsuche / String Matching Gegeben:
Informatik II - SS 2016 (Algorithmen & Datenstrukturen) Vorlesung 21 (15.7.2016) String Matching (Textsuche) Approximate String Matching Algorithmen und Komplexität Textsuche / String Matching Gegeben:
Algorithmische Methoden zur Netzwerkanalyse
 Algorithmische Methoden zur Netzwerkanalyse Prof. Dr. Henning Meyerhenke Institut für Theoretische Informatik 1 KIT Henning Universität desmeyerhenke, Landes Baden-Württemberg Institutund für Theoretische
Algorithmische Methoden zur Netzwerkanalyse Prof. Dr. Henning Meyerhenke Institut für Theoretische Informatik 1 KIT Henning Universität desmeyerhenke, Landes Baden-Württemberg Institutund für Theoretische
Anordnungstechniken für konvektionsdominante Probleme im Ê 3. Dimensionsunabhängige Verfahren. Algorithmen für planare Graphen. Numerische Beispiele
 Anordnungstechniken für konvektionsdominante Probleme im Ê 3 Inhalt: Einführung Dimensionsunabhängige Verfahren Algorithmen für planare Graphen Anordnungen im Ê 3 Numerische Beispiele 2 Einführung betrachtet
Anordnungstechniken für konvektionsdominante Probleme im Ê 3 Inhalt: Einführung Dimensionsunabhängige Verfahren Algorithmen für planare Graphen Anordnungen im Ê 3 Numerische Beispiele 2 Einführung betrachtet
Übung 2 Algorithmen II
 Yaroslav Akhremtsev, Demian Hespe yaroslav.akhremtsev@kit.edu, hespe@kit.edu Mit Folien von Michael Axtmann (teilweise) http://algo2.iti.kit.edu/algorithmenii_ws17.php - 0 Akhremtsev, Hespe: KIT Universität
Yaroslav Akhremtsev, Demian Hespe yaroslav.akhremtsev@kit.edu, hespe@kit.edu Mit Folien von Michael Axtmann (teilweise) http://algo2.iti.kit.edu/algorithmenii_ws17.php - 0 Akhremtsev, Hespe: KIT Universität
Signalverarbeitung 2. Volker Stahl - 1 -
 - 1 - Hidden Markov Modelle - 2 - Idee Zu klassifizierende Merkmalvektorfolge wurde von einem (unbekannten) System erzeugt. Nutze Referenzmerkmalvektorfolgen um ein Modell Des erzeugenden Systems zu bauen
- 1 - Hidden Markov Modelle - 2 - Idee Zu klassifizierende Merkmalvektorfolge wurde von einem (unbekannten) System erzeugt. Nutze Referenzmerkmalvektorfolgen um ein Modell Des erzeugenden Systems zu bauen
Algorithms and Experiments for Parameterized Approaches to Hard Graph Problems
 Algorithms and Experiments for Parameterized Approaches to Hard Graph Problems Falk Hüffner Friedrich-Schiller-Universität Jena Institut für Informatik 19. Dezember 2007 Falk Hüffner (Uni Jena) Algorithms
Algorithms and Experiments for Parameterized Approaches to Hard Graph Problems Falk Hüffner Friedrich-Schiller-Universität Jena Institut für Informatik 19. Dezember 2007 Falk Hüffner (Uni Jena) Algorithms
Graphentheorie. Kürzeste Wege. Kürzeste Wege. Kürzeste Wege. Rainer Schrader. 25. Oktober 2007
 Graphentheorie Rainer Schrader Zentrum für Angewandte Informatik Köln 25. Oktober 2007 1 / 20 2 / 20 Wir werden Optimierungsprobleme vom folgenden Typ betrachten: gegeben eine Menge X und eine Funktion
Graphentheorie Rainer Schrader Zentrum für Angewandte Informatik Köln 25. Oktober 2007 1 / 20 2 / 20 Wir werden Optimierungsprobleme vom folgenden Typ betrachten: gegeben eine Menge X und eine Funktion
Schnellste Wege, Teil II Stable Marriages
 Schnellste Wege, Teil II Stable Marriages Kurt Mehlhorn und Kosta Panagiotou Max-Planck-Institut für Informatik Vorlesung Computational Thinking Übersicht Wiederholung: Grundalg und Korrektheit Dijkstras
Schnellste Wege, Teil II Stable Marriages Kurt Mehlhorn und Kosta Panagiotou Max-Planck-Institut für Informatik Vorlesung Computational Thinking Übersicht Wiederholung: Grundalg und Korrektheit Dijkstras
Uberblick 1. Problemstellung 2. Kongurationsraum 3. Bewegungsplanung fur einen Punktroboter 4. Minkowski Summen 5. Pseudo-Scheiben 6. Bewegungsplanung
 Vorlesung Geometrische Algorithmen Bewegungsplanung fur Roboter (Robot Motion Planning) Sven Schuierer Uberblick 1. Problemstellung 2. Kongurationsraum 3. Bewegungsplanung fur einen Punktroboter 4. Minkowski
Vorlesung Geometrische Algorithmen Bewegungsplanung fur Roboter (Robot Motion Planning) Sven Schuierer Uberblick 1. Problemstellung 2. Kongurationsraum 3. Bewegungsplanung fur einen Punktroboter 4. Minkowski
Algorithmen und Datenstrukturen (für ET/IT)
") Algorithmen und Datenstrukturen (für ET/IT) Wintersemester / Dr. Tobias Lasser Computer Aided Medical Procedures Technische Universität München Programm heute 7 Fortgeschrittene Datenstrukturen Such-Algorithmen
Algorithmen und Datenstrukturen (für ET/IT) Wintersemester / Dr. Tobias Lasser Computer Aided Medical Procedures Technische Universität München Programm heute 7 Fortgeschrittene Datenstrukturen Such-Algorithmen
Algorithmische Methoden zur Netzwerkanalyse
 Algorithmische Methoden zur Netzwerkanalyse Prof. Dr. Henning Meyerhenke Institut für Theoretische Informatik 1 KIT Henning Die Forschungsuniversität Meyerhenke, in der Institut für Theoretische Informatik
Algorithmische Methoden zur Netzwerkanalyse Prof. Dr. Henning Meyerhenke Institut für Theoretische Informatik 1 KIT Henning Die Forschungsuniversität Meyerhenke, in der Institut für Theoretische Informatik
Maximale s t-flüsse in Planaren Graphen
 Maximale s t-flüsse in Planaren Graphen Vorlesung Algorithmen für planare Graphen June 1, 2015 Ignaz Rutter INSTITUT FÜR THEORETISCHE INFORMATIK PROF. DR. DOROTHEA WAGNER KIT Universität des Landes Baden-Württemberg
Maximale s t-flüsse in Planaren Graphen Vorlesung Algorithmen für planare Graphen June 1, 2015 Ignaz Rutter INSTITUT FÜR THEORETISCHE INFORMATIK PROF. DR. DOROTHEA WAGNER KIT Universität des Landes Baden-Württemberg
6. Transitive Hülle. 6.1 Min-Plus-Matrix-Produkt und Min-Plus-Transitive Hülle Ring Z(+, ) Semiring N(+, )
 Semiring N(+, )") 6. Transitive Hülle 6.1 Min-Plus-Matrix-Produkt und Min-Plus-Transitive Hülle Ring Z(+, ) Semiring N(+, ) Gruppe Halbgruppe Halbgruppe Halbgruppe Wir betrachten den (kommutativen) Semiring über R { } mit
6. Transitive Hülle 6.1 Min-Plus-Matrix-Produkt und Min-Plus-Transitive Hülle Ring Z(+, ) Semiring N(+, ) Gruppe Halbgruppe Halbgruppe Halbgruppe Wir betrachten den (kommutativen) Semiring über R { } mit
Folien aus der Vorlesung Optimierung I SS2013
 Folien aus der Vorlesung Optimierung I SS2013 Dr. Jens Maßberg Institut für Optimierung und Operations Research, Universität Ulm July 10, 2013 Datenstrukturen für Graphen und Digraphen Graph Scanning Algorithmus
Folien aus der Vorlesung Optimierung I SS2013 Dr. Jens Maßberg Institut für Optimierung und Operations Research, Universität Ulm July 10, 2013 Datenstrukturen für Graphen und Digraphen Graph Scanning Algorithmus
Anwendungen des Fréchet-Abstandes Das Constrained Free Space Diagram zur Analyse von Körperbewegungen
 Anwendungen des Fréchet-Abstandes Das Constrained Free Space Diagram zur Analyse von Körperbewegungen David Knötel Freie Universität Berlin, Institut für Informatik Seminar über Algorithmen Leitfaden Wiederholung
Anwendungen des Fréchet-Abstandes Das Constrained Free Space Diagram zur Analyse von Körperbewegungen David Knötel Freie Universität Berlin, Institut für Informatik Seminar über Algorithmen Leitfaden Wiederholung
Seminar über Algorithmen
 Seminar über Algorithmen Geographisches Routing von Stephan Hagendorf Inhalt Einleitung / Wiederholung Modell Geographische Routing Greedy Routing Face Routing Adaptive/Bounded Face Routing Other Face
Seminar über Algorithmen Geographisches Routing von Stephan Hagendorf Inhalt Einleitung / Wiederholung Modell Geographische Routing Greedy Routing Face Routing Adaptive/Bounded Face Routing Other Face
Effiziente Algorithmen I
 H 10. Präsenzaufgabenblatt, Wintersemester 2015/16 Übungstunde am 18.01.2015 Aufgabe Q Ein Reiseveranstalter besitzt ein Flugzeug, das maximal p Personen aufnehmen kann. Der Veranstalter bietet einen Flug
H 10. Präsenzaufgabenblatt, Wintersemester 2015/16 Übungstunde am 18.01.2015 Aufgabe Q Ein Reiseveranstalter besitzt ein Flugzeug, das maximal p Personen aufnehmen kann. Der Veranstalter bietet einen Flug
Fortgeschrittene Netzwerk- und Graph-Algorithmen
 Fortgeschrittene Netzwerk- und Graph-Algorithmen Prof. Dr. Hanjo Täubig Lehrstuhl für Effiziente Algorithmen (Prof. Dr. Ernst W. Mayr) Institut für Informatik Technische Universität München Wintersemester
Fortgeschrittene Netzwerk- und Graph-Algorithmen Prof. Dr. Hanjo Täubig Lehrstuhl für Effiziente Algorithmen (Prof. Dr. Ernst W. Mayr) Institut für Informatik Technische Universität München Wintersemester
Anwendungen. Für optimale Wege in DAGs gibt es eine Fülle von Anwendungen. Wir betrachten zwei:
 Anwendungen Für optimale Wege in DAGs gibt es eine Fülle von Anwendungen. Wir betrachten zwei: Optimale Einteilung in Blöcke (z.b. in der Textverarbeitung) Projektplanung Graphentheorie HS Bonn-Rhein-Sieg,
Anwendungen Für optimale Wege in DAGs gibt es eine Fülle von Anwendungen. Wir betrachten zwei: Optimale Einteilung in Blöcke (z.b. in der Textverarbeitung) Projektplanung Graphentheorie HS Bonn-Rhein-Sieg,
Hidden Markov Model (HMM)
") Hidden Markov Model (HMM) Kapitel 1 Spezialvorlesung Modul 10-202-2206 (Fortgeschrittene Methoden in der Bioinformatik) Jana Hertel Professur für Bioinformatik Institut für Informatik Universität Leipzig
Hidden Markov Model (HMM) Kapitel 1 Spezialvorlesung Modul 10-202-2206 (Fortgeschrittene Methoden in der Bioinformatik) Jana Hertel Professur für Bioinformatik Institut für Informatik Universität Leipzig
Wissensentdeckung in Datenbanken
 Wissensentdeckung in Datenbanken Belief Propagation, Strukturlernen Nico Piatkowski und Uwe Ligges 29.06.2017 1 von 13 Überblick Was bisher geschah... Modellklassen Verlustfunktionen Numerische Optimierung
Wissensentdeckung in Datenbanken Belief Propagation, Strukturlernen Nico Piatkowski und Uwe Ligges 29.06.2017 1 von 13 Überblick Was bisher geschah... Modellklassen Verlustfunktionen Numerische Optimierung
Projektgruppe. Text Labeling mit Sequenzmodellen
 Projektgruppe Enes Yigitbas Text Labeling mit Sequenzmodellen 4. Juni 2010 Motivation Möglichkeit der effizienten Verarbeitung von riesigen Datenmengen In vielen Bereichen erwünschte automatisierte Aufgabe:
Projektgruppe Enes Yigitbas Text Labeling mit Sequenzmodellen 4. Juni 2010 Motivation Möglichkeit der effizienten Verarbeitung von riesigen Datenmengen In vielen Bereichen erwünschte automatisierte Aufgabe:
Algorithmen zur Visualisierung von Graphen
 Algorithmen zur Visualisierung von Graphen Flussmethoden Knickminimierung in orthogonalen Layouts Vorlesung im Sommersemester 2009 Martin Nöllenburg.05.2009 Lehrstuhl für Algorithmik nstitut für Theoretische
Algorithmen zur Visualisierung von Graphen Flussmethoden Knickminimierung in orthogonalen Layouts Vorlesung im Sommersemester 2009 Martin Nöllenburg.05.2009 Lehrstuhl für Algorithmik nstitut für Theoretische
Teil III. Komplexitätstheorie
 Teil III Komplexitätstheorie 125 / 160 Übersicht Die Klassen P und NP Die Klasse P Die Klassen NP NP-Vollständigkeit NP-Vollständige Probleme Weitere NP-vollständige Probleme 127 / 160 Die Klasse P Ein
Teil III Komplexitätstheorie 125 / 160 Übersicht Die Klassen P und NP Die Klasse P Die Klassen NP NP-Vollständigkeit NP-Vollständige Probleme Weitere NP-vollständige Probleme 127 / 160 Die Klasse P Ein
Fortgeschrittene Netzwerk- und Graph-Algorithmen
 Fortgeschrittene Netzwerk- und Graph-Algorithmen Prof. Dr. Hanjo Täubig Lehrstuhl für Effiziente Algorithmen (Prof. Dr. Ernst W. Mayr) Institut für Informatik Technische Universität München Wintersemester
Fortgeschrittene Netzwerk- und Graph-Algorithmen Prof. Dr. Hanjo Täubig Lehrstuhl für Effiziente Algorithmen (Prof. Dr. Ernst W. Mayr) Institut für Informatik Technische Universität München Wintersemester
Lokalisierung von inneren und äußeren Grenzen in Sensornetzwerken
 Lokalisierung von inneren und äußeren Grenzen in Sensornetzwerken Seminararbeit: Algorithmen für Sensornetzwerke Thomas Gramer 1 Thomas Gramer: KIT Universität des Landes Baden-Württemberg und nationales
Lokalisierung von inneren und äußeren Grenzen in Sensornetzwerken Seminararbeit: Algorithmen für Sensornetzwerke Thomas Gramer 1 Thomas Gramer: KIT Universität des Landes Baden-Württemberg und nationales
Klausurvorbereitung. 1 Zentrale Begriffe. 2 Bipartite Graphen. 2.1 Begriffe. Vorlesung Graphen und Optimierung Sommersemester 2011 Prof. S.
 Vorlesung Graphen und Optimierung Sommersemester 2011 Prof. S. Lange Klausurvorbereitung Hier finden Sie alle Begriffe, Zusammenhänge und Algorithmen, die mit Blick auf die Klausur relevant sind. Um es
Vorlesung Graphen und Optimierung Sommersemester 2011 Prof. S. Lange Klausurvorbereitung Hier finden Sie alle Begriffe, Zusammenhänge und Algorithmen, die mit Blick auf die Klausur relevant sind. Um es
Wie findet das Navi den Weg?
 0.05.0 Verwandte Fragestellungen Problemstellungen aus der Praxis Prof. Dr. Paul Rawiel Gliederung des Vortrags Speicherung von Kartendaten zur Navigation Kriterien für die Navigation Finden des kürzesten
0.05.0 Verwandte Fragestellungen Problemstellungen aus der Praxis Prof. Dr. Paul Rawiel Gliederung des Vortrags Speicherung von Kartendaten zur Navigation Kriterien für die Navigation Finden des kürzesten
2. Klausur zur Vorlesung Theoretische Grundlagen der Informatik Wintersemester 2016/2017
 2. Klausur zur Vorlesung Theoretische Grundlagen der Informatik Wintersemester 2016/2017 Hier Aufkleber mit Name und Matrikelnummer anbringen Vorname: Nachname: Matrikelnummer: Beachten Sie: Bringen Sie
2. Klausur zur Vorlesung Theoretische Grundlagen der Informatik Wintersemester 2016/2017 Hier Aufkleber mit Name und Matrikelnummer anbringen Vorname: Nachname: Matrikelnummer: Beachten Sie: Bringen Sie
Distanzprobleme in der Ebene
 Distanzprobleme in der Ebene (Literatur: deberg et al., Kapitel 7,9) Christian Knauer 1 Motivation: Alle nächsten Nachbarn Gegeben: Eine Menge von Punkten P in der Ebene Berechne: Zu jedem Punkt aus P
Distanzprobleme in der Ebene (Literatur: deberg et al., Kapitel 7,9) Christian Knauer 1 Motivation: Alle nächsten Nachbarn Gegeben: Eine Menge von Punkten P in der Ebene Berechne: Zu jedem Punkt aus P
Routing Algorithmen. Begriffe, Definitionen
 Begriffe, Definitionen Routing (aus der Informatik) Wegewahl oder Verkehrslenkung bezeichnet in der Telekommunikation das Festlegen von Wegen für Nachrichtenströme bei der Nachrichtenübermittlung über
Begriffe, Definitionen Routing (aus der Informatik) Wegewahl oder Verkehrslenkung bezeichnet in der Telekommunikation das Festlegen von Wegen für Nachrichtenströme bei der Nachrichtenübermittlung über
WS 2015/16 Diskrete Strukturen Kapitel 4: Graphen (Matchings)
") WS 2015/16 Diskrete Strukturen Kapitel 4: Graphen (Matchings) Hans-Joachim Bungartz Lehrstuhl für wissenschaftliches Rechnen Fakultät für Informatik Technische Universität München http://www5.in.tum.de/wiki/index.php/diskrete_strukturen_-_winter_15
WS 2015/16 Diskrete Strukturen Kapitel 4: Graphen (Matchings) Hans-Joachim Bungartz Lehrstuhl für wissenschaftliches Rechnen Fakultät für Informatik Technische Universität München http://www5.in.tum.de/wiki/index.php/diskrete_strukturen_-_winter_15
Überblick. TSP Vergleich der Lösungen. Das Travelling Salesman Problem. Nearest-Neighbor Heuristik für TSP
 Kap..1 Heuristiken Kap.. Approximative Algorithmen und Gütegarantien Professor Dr. Lehrstuhl für Algorithm Engineering, LS11 Fakultät für Informatik, TU Dortmund 3. VO DAP SS 008 14. Juli 009 Überblick
Kap..1 Heuristiken Kap.. Approximative Algorithmen und Gütegarantien Professor Dr. Lehrstuhl für Algorithm Engineering, LS11 Fakultät für Informatik, TU Dortmund 3. VO DAP SS 008 14. Juli 009 Überblick
Kap. 7.1 Heuristiken Kap. 7.2 Approximative Algorithmen und Gütegarantien
 Kap. 7.1 Heuristiken Kap. 7.2 Approximative Algorithmen und Gütegarantien Professor Dr. Lehrstuhl für Algorithm Engineering, LS11 Fakultät für Informatik, TU Dortmund 23. VO DAP2 SS 2008 14. Juli 2009
Kap. 7.1 Heuristiken Kap. 7.2 Approximative Algorithmen und Gütegarantien Professor Dr. Lehrstuhl für Algorithm Engineering, LS11 Fakultät für Informatik, TU Dortmund 23. VO DAP2 SS 2008 14. Juli 2009
Graphenalgorithmen und lineare Algebra Hand in Hand Prof. Dr. Henning Meyerhenke
 Graphenalgorithmen und lineare Algebra Hand in Hand Prof. Dr. Henning Meyerhenke Institut für Theoretische Informatik 1 KIT Henning Universität desmeyerhenke, Landes Baden-Württemberg Institutund für Theoretische
Graphenalgorithmen und lineare Algebra Hand in Hand Prof. Dr. Henning Meyerhenke Institut für Theoretische Informatik 1 KIT Henning Universität desmeyerhenke, Landes Baden-Württemberg Institutund für Theoretische
Distributed Algorithms. Image and Video Processing
 Chapter 6 Optical Character Recognition Distributed Algorithms for Übersicht Motivation Texterkennung in Bildern und Videos 1. Erkennung von Textregionen/Textzeilen 2. Segmentierung einzelner Buchstaben
Chapter 6 Optical Character Recognition Distributed Algorithms for Übersicht Motivation Texterkennung in Bildern und Videos 1. Erkennung von Textregionen/Textzeilen 2. Segmentierung einzelner Buchstaben
Kapitel 7: Flüsse in Netzwerken und Anwendungen Gliederung der Vorlesung
 Gliederung der Vorlesung 1. Grundbegriffe. Elementare Graphalgorithmen und Anwendungen 3. Kürzeste Wege 4. Minimale spannende Bäume 5. Färbungen und Cliquen 6. Traveling Salesman Problem 7. Flüsse in Netzwerken
Gliederung der Vorlesung 1. Grundbegriffe. Elementare Graphalgorithmen und Anwendungen 3. Kürzeste Wege 4. Minimale spannende Bäume 5. Färbungen und Cliquen 6. Traveling Salesman Problem 7. Flüsse in Netzwerken
Seminar über Algorithmen Alexander Manecke
 Seminar über Algorithmen 1 Einleitung Ein großes Problem bei Ad-Hoc und Sensornetzwerken sind die begrenzten Ressourcen. Wenn beispielsweise Sensorknoten an schwer zugänglichen Stellen ausgebracht werden,
Seminar über Algorithmen 1 Einleitung Ein großes Problem bei Ad-Hoc und Sensornetzwerken sind die begrenzten Ressourcen. Wenn beispielsweise Sensorknoten an schwer zugänglichen Stellen ausgebracht werden,
Algorithmische Methoden für schwere Optimierungsprobleme
 Algorithmische Methoden für schwere Optimierungsprobleme Prof. Dr. Henning Meyerhenke Institut für Theoretische Informatik 1 KIT Henning Universität desmeyerhenke, Landes Baden-Württemberg Institutund
Algorithmische Methoden für schwere Optimierungsprobleme Prof. Dr. Henning Meyerhenke Institut für Theoretische Informatik 1 KIT Henning Universität desmeyerhenke, Landes Baden-Württemberg Institutund
Zeitkomplexität (1) Proseminar Theoretische Informatik. Proseminar Theoretische Informatik: Lisa Dohrmann 1
 Proseminar Theoretische Informatik. Proseminar Theoretische Informatik: Lisa Dohrmann 1") Zeitkomplexität (1) Proseminar Theoretische Informatik Proseminar Theoretische Informatik: Lisa Dohrmann 1 Warum Komplexitätsbetrachtung? Ein im Prinzip entscheidbares und berechenbares Problem kann in
Zeitkomplexität (1) Proseminar Theoretische Informatik Proseminar Theoretische Informatik: Lisa Dohrmann 1 Warum Komplexitätsbetrachtung? Ein im Prinzip entscheidbares und berechenbares Problem kann in
Hidden Markov Models (HMM)
") Hidden Markov Models (HMM) Kursfolien Karin Haenelt 1 Themen Definitionen Stochastischer Prozess Markow Kette (Visible) Markov Model Hidden Markov Model Aufgaben, die mit HMMs bearbeitet werden Algorithmen
Hidden Markov Models (HMM) Kursfolien Karin Haenelt 1 Themen Definitionen Stochastischer Prozess Markow Kette (Visible) Markov Model Hidden Markov Model Aufgaben, die mit HMMs bearbeitet werden Algorithmen
1.Aufgabe: Minimal aufspannender Baum
 1.Aufgabe: Minimal aufspannender Baum 11+4+8 Punkte v 1 v 2 1 3 4 9 v 3 v 4 v 5 v 7 7 4 3 5 8 1 4 v 7 v 8 v 9 3 2 7 v 10 Abbildung 1: Der Graph G mit Kantengewichten (a) Bestimme mit Hilfe des Algorithmus
1.Aufgabe: Minimal aufspannender Baum 11+4+8 Punkte v 1 v 2 1 3 4 9 v 3 v 4 v 5 v 7 7 4 3 5 8 1 4 v 7 v 8 v 9 3 2 7 v 10 Abbildung 1: Der Graph G mit Kantengewichten (a) Bestimme mit Hilfe des Algorithmus
Überblick. Organisatorisches. Erinnerung: Motivation Domin. Sets. Algorithmen für Ad-hoc- und Sensornetze
 Überblick Organisatorisches Clustering Was bisher geschah Luby s MIS-Algorithmus & Beweis Von MIS zu CDS Vorlesungsevaluation Medium Access Control (MAC) und Coloring MAC-Layer / Motivation Einstieg ins
Überblick Organisatorisches Clustering Was bisher geschah Luby s MIS-Algorithmus & Beweis Von MIS zu CDS Vorlesungsevaluation Medium Access Control (MAC) und Coloring MAC-Layer / Motivation Einstieg ins
Geradenarrangements und Dualität von Punkten und Geraden
 Vorlesung Algorithmische Geometrie von Punkten und Geraden INSTITUT FÜR THEORETISCHE INFORMATIK FAKULTÄT FÜR INFORMATIK Martin Nöllenburg 12.06.2012 Dualitätsabbildung Bisher haben wir Dualität für planare
Vorlesung Algorithmische Geometrie von Punkten und Geraden INSTITUT FÜR THEORETISCHE INFORMATIK FAKULTÄT FÜR INFORMATIK Martin Nöllenburg 12.06.2012 Dualitätsabbildung Bisher haben wir Dualität für planare
15. Elementare Graphalgorithmen
 Graphen sind eine der wichtigste Modellierungskonzepte der Informatik Graphalgorithmen bilden die Grundlage vieler Algorithmen in der Praxis Zunächst kurze Wiederholung von Graphen. Dann Darstellungen
Graphen sind eine der wichtigste Modellierungskonzepte der Informatik Graphalgorithmen bilden die Grundlage vieler Algorithmen in der Praxis Zunächst kurze Wiederholung von Graphen. Dann Darstellungen
Theoretische Informatik. Exkurs: Komplexität von Optimierungsproblemen. Optimierungsprobleme. Optimierungsprobleme. Exkurs Optimierungsprobleme
 Theoretische Informatik Exkurs Rainer Schrader Exkurs: Komplexität von n Institut für Informatik 13. Mai 2009 1 / 34 2 / 34 Gliederung Entscheidungs- und Approximationen und Gütegarantien zwei Greedy-Strategien
Theoretische Informatik Exkurs Rainer Schrader Exkurs: Komplexität von n Institut für Informatik 13. Mai 2009 1 / 34 2 / 34 Gliederung Entscheidungs- und Approximationen und Gütegarantien zwei Greedy-Strategien
Schematisierung von Karten
 Vorlesung Algorithmische Kartografie Schematisierung von (Straßen-)Karten LEHRSTUHL FÜR ALGORITHMIK I INSTITUT FÜR THEORETISCHE INFORMATIK FAKULTÄT FÜR INFORMATIK Martin Nöllenburg 30.04.2013 Schematische
Vorlesung Algorithmische Kartografie Schematisierung von (Straßen-)Karten LEHRSTUHL FÜR ALGORITHMIK I INSTITUT FÜR THEORETISCHE INFORMATIK FAKULTÄT FÜR INFORMATIK Martin Nöllenburg 30.04.2013 Schematische