20 Eingebettete Software
|
|
|
- Jonas Brodbeck
- vor 8 Jahren
- Abrufe
Transkript
1 20 Eingebettete Software 20.0 Einführung Lernziele Echtzeitsysteme Eingebettete Systeme 20.1 Entwurf eingebetteter Systeme Modellierung von Echtzeitsystemen Programmierung von Echtzeitsystemen 20.2 Architekturmuster Beobachten und Reagieren Umgebungssteuerung Pipelineverarbeitung Stand: Folie Eingebettete Software 20.3 Analyse des Zeitverhaltens Antwortzeiten Ausführungszeiten 20.4 Echtzeitbetriebssysteme Prozessverwaltung Prioritäten Scheduling Stand: Folie

2 20.0 Lernziele das Konzept eingebetteter Software für Systeme, die auf externe Ereignisse reagieren, verstehen einen Entwurfsprozess für Echtzeitsysteme, bei dem die Software als eine Menge kooperierender Prozesse organisiert ist, kennen lernen, drei Architekturmuster für eingebettete Echtzeitsysteme kennen, die Organisation von Echtzeitbetriebssystemen und ihre Rolle in eingebetteten Echtzeitsystemen verstehen Stand: Folie Eingebettete Systeme Systeme aus Hardware und Software, die in einen technischen Kontext eingebettet sind Überwachung, Steuerung, Regelung Signalverarbeitung in technischen Geräten integrierte Computeranwendungen Kameras, Waschmaschinen, Kaffeemaschinen, medizinische Geräte, Router, DVD-Player, ABS etc. oft keine eigene oder unkonventionelle Benutzerschnittstelle Reaktion auf externe Ereignisse am meisten verbreitete Computeranwendung oft spezielle (einfache) Hardware Stand: Folie

3 20.0 Zeitanforderungen Reaktion eingebetteter Systeme in der Regel innerhalb vorgegebener Zeitschranke erforderlich Unterschied zu Informationssystemen, Webanwendungen etc. Korrektheit zeitabhängig bestimmte Ausgabe zu bestimmter Eingabe nicht ausreichend muss auch innerhalb bestimmter Zeit erfolgen Echtzeitsystem Stand: Folie Echtzeitsystem Definition Echtzeitbetrieb ist der Betrieb eines Rechnersystems, bei dem Programme zur Verarbeitung anfallender Daten ständig betriebsbereit sind, derart, dass die Verarbeitungsergebnisse innerhalb einer vorgegebenen Zeitspanne verfügbar sind [DIN 44300]. Harte Echtzeitanforderungen Fehler, wenn Zeitschranke nicht eingehalten wird im Fehlerfall oft schwerwiegende Folgen Weiche Echtzeitanforderungen Überschreiten der Zeitschranke kann vorkommen bei Überschreiten eingeschränkte Leistung des Systems Stand: Folie

4 20.0 Charakteristika eingebetteter Systeme Dauerbetrieb von Einschalten der Hardware bis Ausschalten der Hardware Interaktionen mit der Umgebung unvorhersagbar und nicht beschränkbar unerwartete Ereignisse zu verarbeiten Physikalische Beschränkungen Platz und Gewicht, Stromversorgung, Immissionen Direkte Ansteuerung externer Hardware keine Treiberschicht Sicherheit und Zuverlässigkeit im Vordergrund bei Fehlern oft gravierende Schäden Stand: Folie Entwurf eingebetteter Systeme Systems Engineering statt Software Engineering Berücksichtigung der Hardware Konstruktion und Leistung Geeignete Aufteilung der Systemfähigkeiten Software oder Hardware Systemnahe Entscheidungen schon zu Beginn Hardware, Hilfssoftware, Zeitsteuerung kein Top-down-Entwurf möglich Zusätzliche Funktionalität oft nötig Energiemanagement Stand: Folie

5 Reaktive Systeme Eingebettete System reagieren auf externe Ereignisse Reiz-Reaktion-System bzw. Stimulus-Response-System Response auf Stimulus innerhalb bestimmter Zeit Verhalten des Systems als Tabelle beschreibbar Stimulus Response Arten von Stimuli periodisch vorhersagbare regelmäßige Zeitabstände z.b. Sensorabfrage alle 50 Millisekunden sporadisch (aperiodisch) unregelmäßig, ggf. selten z.b. Stromausfall Verarbeitung meist über Interrupt Stand: Folie Beispiel: Stimulus-Response-Tabelle píáãìäìë ÉáåòÉäåÉê=pÉåëçê=éçëáíáî oéëéçåëé ^ä~êã=~ìëä ëéåi=i~ãééå=áã=rãñéäç=çéë=péåëçêë=éáåëåü~äíéå òïéá=ççéê=ãéüê=péåëçêéå= éçëáíáî ^ä~êã=~ìëä ëéåi=i~ãééå=áã=rãñéäç=çéê=péåëçêéå=éáåëåü~äíéåi= mçäáòéá=~ä~êãáéêéå pé~ååìåöë~äñ~ää=òïáëåüéå= oéëéêîéä~ííéêáé=éáåëåü~äíéåi=píêçãîéêëçêöìåö=íéëíéå NMB=ìåÇ=OMB pé~ååìåöë~äñ~ää=îçå=ãéüê= oéëéêîéä~ííéêáé=éáåëåü~äíéåi=píêçãîéêëçêöìåö=íéëíéåi=^ä~êã= ~äë=omb ~ìëä ëéåi=mçäáòéá=~ä~êãáéêéå ^ìëñ~ää=çéê= péêîáåé=äéå~åüêáåüíáöéå píêçãîéêëçêöìåö péåëçê~ìëñ~ää péêîáåé=äéå~åüêáåüíáöéå m~åáâëåü~äíéê=éçëáíáî ^ä~êãä ëåüìåö ^ä~êã=~ìëä ëéåi=i~ãééå=áã=rãñéäç=çéë=påü~äíéìäíë=éáåëåü~äíéåi= mçäáòéá=~ä~êãáéêéå ^ä~êã=~ìëëåü~äíéåi=i~ãééå=~ìëëåü~äíéå Stand: Folie

6 Aufbau eines eingebetteten Echtzeitsystems Sensor Sensor Sensor Sensor Sensor Sensor Echtzeitsteuerungssystem Aktor Aktor Aktor Aktor Stand: Folie Überlegungen zur Architektur Rechtzeitiges Reagieren erforderlich schnelles Umschalten zwischen Stimulusverarbeitungen Unterschiedliche Zeitanforderungen sequentielle Abarbeitung meist nicht angemessen Architekturansatz: Kooperierende nebenläufige Prozesse Echtzeitbetriebssystem unterschiedliche Prioritäten Interrupt-Steuerung Stand: Folie

7 Einzelner Sensor-Aktor-Prozess Sensor Aktor Stimulus Response Sensorsteuerung Datenverarbeitung Aktorsteuerung Sensorsteuerung sammelt Daten von Sensor, puffert diese Daten gegebenenfalls Datenverarbeitung verarbeitet gesammelte Daten und berechnet Reaktion Aktorsteuerung erzeugt Steuerungssignale für die Aktoren Stand: Folie Aktivitäten im Entwurfsprozess Auswahl der Ausführungsplattform Hardware, Echtzeitbetriebssystem Bestimmung der Stimuli und zugehörigen Responses Analyse des Zeitverhaltens Zeitvorgaben für Stimulus Verarbeitung Response Prozessentwurf nebenläufige Prozesse nach Architekturmuster -> 20.2 Algorithmenentwurf einschließlich Aufwandsanalyse (insbesondere Zeitaufwand) Datenentwurf Festlegung des Datenaustausches zwischen den Prozessen Prozessplanung (Scheduling) Stand: Folie

8 Prozesskoordination Zugriff nebenläufiger Prozesse auf gemeinsame Ressourcen Lesen und Schreiben durch unterschiedliche Prozesse gegenseitiger Ausschluss erforderlich Semaphore kritische Bereiche Monitore Ausgleich unterschiedlicher Geschwindigkeiten Bereitstellen und Abarbeiten von Daten Puffer erforderlich häufig Ringpuffer Stand: Folie Modellierung von Echtzeitsystemen Stimuli bewirken Zustandsübergänge Modellierung durch Zustandsmodelle Darstellung mit UML-Zustandsdiagrammen Stand: Folie

9 Zustandsmodell eines Echtzeitsystems Stand: Folie Programmierung von Echtzeitsystemen Anforderungen an die Programmierumgebung Zugriff auf Systemhardware Festlegung von Zeitpunkten / Zeitspannen für Operationen Effizienz Verwendete Sprachen Assembler und systemnahe Sprachen wie C effizient fehleranfällig wegen fehlender Features für Nebenläufigkeit Echtzeitsprachen wie PEARL Objektorientierte Sprachen wie Java mit Erweiterungen asynchrone Kommunikation absolute und relative Zeitangaben nicht unterbrechbare Threads keine Verzögerungen durch Speicherbereinigung Stand: Folie

10 Architekturmuster Grundstruktur eingebettete Software prozessorientiert interaktive Software objekt- / komponentenorientiert Echtzeitarchitekturmuster Beobachten und Reagieren Überwachung und Darstellung von Sensorwerten Sensorereignis löst Prozess zur Ereignisbehandlung aus Umgebungssteuerung Sensoren zur Umgebungsüberwachung Aktoren zur Umgebungssteuerung Sensorwerte lösen Steuersignale aus Pipelineverarbeitung Umwandlung von Daten zur Weiterverarbeitung Folge von Verarbeitungsschritten ggf. auf verschiedenen Prozessoren Stand: Folie Anwendung der Architekturmuster Kombination der Muster Umgebungssteuerung mit Aktoren Beobachten der Aktoren und Reagieren bei Ausfall Grundstruktur für weitere Detaillierung mit Entwurfsmustern, z.b. Ausführungssteuerung Kommunikation Resourcenzuweisung Optimierung der Prozessstruktur erforderlich Architekturmuster als Entwurfsvorlagen meist ineffizient nicht zu viele Prozesse verwenden klarer Zusammenhang zwischen Prozessen und Sensoren und Aktoren erforderlich Stand: Folie

11 Muster: Beobachten und Reagieren Stand: Folie Prozess: Beobachten und Reagieren Stand: Folie

12 Beispiel: Beobachten und Reagieren Stand: Folie Muster: Umgebungssteuerung Stand: Folie

13 Prozess: Umgebungssteuerung Stand: Folie Beispiel: Umgebungssteuerung Stand: Folie

14 Muster: Pipelineverarbeitung Stand: Folie Prozess: Pipelineverarbeitung Stand: Folie

15 Beispiel: Pipelineverarbeitung Stand: Folie Analyse des Zeitverhaltens Bestimmung der Häufigkeit von Prozessausführungen um Antwortzeiten garantieren zu können leicht zu berechnen bei periodischen Stimuli schwierig bei sporadischen Stimuli (Wahrscheinlichkeitsrechnung) Ersatz sporadischer Stimuli durch periodische möglich sporadisch: Interrupt bei Ausfall der Stromversorgung periodisch: Abfrage der Stromversorgung alle x msec Wesentliche Faktoren Fristen Häufigkeiten Ausführungszeiten Stand: Folie

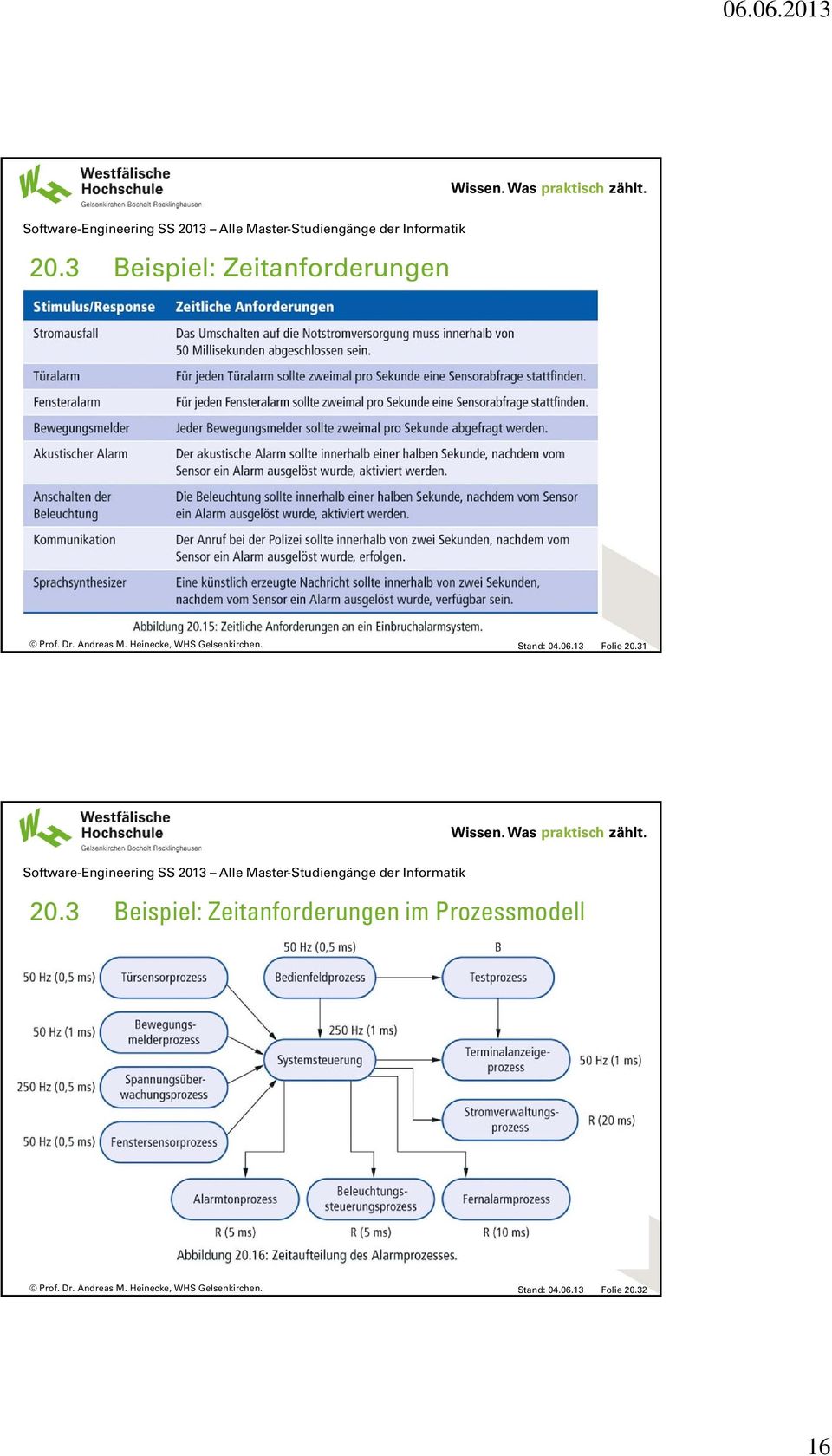
16 20.3 Beispiel: Zeitanforderungen Stand: Folie Beispiel: Zeitanforderungen im Prozessmodell Stand: Folie
17 Echtzeitbetriebssysteme Grundlegende Komponenten Echtzeituhr: vorwiegend für periodische Prozesse Interrupt-Handler: für sporadische Ereignisse Scheduler (Einplaner): zur Auswahl des auszuführenden Prozesses Resourcenmanager: Zuordnung und Freigabe Dispatcher (Verteiler): zum Starten der Prozessausführung Zusätzliche Komponenten Plattenspeicherverwaltung Fehlerverwaltung Konfigurationsmanager Stand: Folie Komponenten eines Echtzeitbetriebssystems Stand: Folie

18 Prozessverwaltung Grundlegende Prioritätsstufen Interrupt-Stufe Vorrangstufe für Prozesse mit sehr kurzer Antwortzeit Echtzeituhr immer auf Interrupt-Stufe Echtzeitstufe nachrangige Stufe für periodische Prozesse weitere Unterteilung der Prioritätsstufen möglich Ziel: Sicherung der Antwortzeit für alle Prozesse Stand: Folie Prozessverwaltung Bearbeitung von Interrupts Sprung zu Interrupt-Routine Interrupt-Routine muss kurz, einfach und schnell sein meist Sperrung anderer Interrupts Bearbeitung des Ereignisses Rückkehr zum unterbrochenen Prozess Bearbeitung von periodischen Prozessen unterschiedliche Häufigkeiten, Ausführungszeiten, Antwortzeiten Echtzeituhr erzeugt periodisch Interrupts Interrupt ruft Scheduler auf Scheduler wählt einen lauffähigen Prozess zur Ausführung aus Stand: Folie

19 Starten von Prozessen Stand: Folie Einplanungsstrategien Zeitplanung ohne Unterbrechung non pre-emptive scheduling einmal gestarteter Prozess läuft, bis er abgeschlossen oder blockiert ist Zeitplanung mit Unterbrechung pre-emptive scheduling laufender Prozess kann durch Prozess höherer Priorität unterbrochen werden Zeitplanungsalgorithmen Ausführung reihum (Round-Robin) Vorzug für höchste Frequenz (Rate Monotonic Scheduling RMS) Dringlichkeitsorientiert: Prozess mit kürzester Anwortzeit zuerst Stand: Folie
 Dringlichkeitsorientiert: Prozess mit kürzester Anwortzeit zuerst Stand: 04.06.")
Scheduling in Echtzeitbetriebssystemen. Prof. Dr. Margarita Esponda Freie Universität Berlin
 Scheduling in Echtzeitbetriebssystemen Prof. Dr. Margarita Esponda Freie Universität Berlin Echtzeitsysteme Korrekte Ergebnisse zum richtigen Zeitpunkt Hart Echtzeitsysteme Eine verspätete Antwort ist
Scheduling in Echtzeitbetriebssystemen Prof. Dr. Margarita Esponda Freie Universität Berlin Echtzeitsysteme Korrekte Ergebnisse zum richtigen Zeitpunkt Hart Echtzeitsysteme Eine verspätete Antwort ist
Echtzeitscheduling (1)
") Echtzeitscheduling (1) Scheduling in Betriebssystemen Ressourcenausteilung (CPU, Speicher, Kommunikation) Faire Ressourcenvergabe, insbesondere CPU Hohe Interaktivität / kurze Reaktionszeit für interaktive
Echtzeitscheduling (1) Scheduling in Betriebssystemen Ressourcenausteilung (CPU, Speicher, Kommunikation) Faire Ressourcenvergabe, insbesondere CPU Hohe Interaktivität / kurze Reaktionszeit für interaktive
AMS Alarm Management System
 AMS Alarm Management System AMS ist das Alarm Management System für Mobotix Kamerasysteme. AMS ist speziell für die Verwendung in Einsatzzentralen bei Sicherheitsdiensten oder Werkschutzzentralen vorgesehen.
AMS Alarm Management System AMS ist das Alarm Management System für Mobotix Kamerasysteme. AMS ist speziell für die Verwendung in Einsatzzentralen bei Sicherheitsdiensten oder Werkschutzzentralen vorgesehen.
Task A Zündung. Task B Einspritzung. Task C Erfassung Pedalwert. J. Schäuffele, Th. Zurawka: Automotive Software Engineering, Vieweg, 2003
 Task! evt. parallel zu bearbeitende Ausführungseinheit! Beispiel: Task A Zündung Task B Einspritzung Task C Erfassung Pedalwert Zeit t J. Schäuffele, Th. Zurawka:, Vieweg, 2003 Echtzeitbetriebssysteme
Task! evt. parallel zu bearbeitende Ausführungseinheit! Beispiel: Task A Zündung Task B Einspritzung Task C Erfassung Pedalwert Zeit t J. Schäuffele, Th. Zurawka:, Vieweg, 2003 Echtzeitbetriebssysteme
2 Die Terminaldienste Prüfungsanforderungen von Microsoft: Lernziele:
 2 Die Terminaldienste Prüfungsanforderungen von Microsoft: Configuring Terminal Services o Configure Windows Server 2008 Terminal Services RemoteApp (TS RemoteApp) o Configure Terminal Services Gateway
2 Die Terminaldienste Prüfungsanforderungen von Microsoft: Configuring Terminal Services o Configure Windows Server 2008 Terminal Services RemoteApp (TS RemoteApp) o Configure Terminal Services Gateway
GRS SIGNUM Product-Lifecycle-Management
 GRS SIGNUM Product-Lifecycle-Management Das optionale Modul Product-Lifecycle-Management stellt eine mächtige Ergänzung zum Modul Forschung & Entwicklung dar. Folgende Punkte werden dabei abgedeckt: Definition
GRS SIGNUM Product-Lifecycle-Management Das optionale Modul Product-Lifecycle-Management stellt eine mächtige Ergänzung zum Modul Forschung & Entwicklung dar. Folgende Punkte werden dabei abgedeckt: Definition
Dok.-Nr.: Seite 1 von 6
 Logo Apotheke Planung, Durchführung und Dokumentation von QM-Audits Standardarbeitsanweisung (SOP) Standort des Originals: Dok.-Nr.: Seite 1 von 6 Nummer der vorliegenden Verfaßt durch Freigabe durch Apothekenleitung
Logo Apotheke Planung, Durchführung und Dokumentation von QM-Audits Standardarbeitsanweisung (SOP) Standort des Originals: Dok.-Nr.: Seite 1 von 6 Nummer der vorliegenden Verfaßt durch Freigabe durch Apothekenleitung
Anwenderleitfaden Citrix. Stand Februar 2008
 Anwenderleitfaden Citrix Stand Februar 2008 Inhalt 1. Ansprechpartner...3 2. Einführung...4 3. Citrix-Standard-Anwendungen...5 4. Sperrung der Citrix-Session durch falsche Anmeldung...5 5. Unterbrechung
Anwenderleitfaden Citrix Stand Februar 2008 Inhalt 1. Ansprechpartner...3 2. Einführung...4 3. Citrix-Standard-Anwendungen...5 4. Sperrung der Citrix-Session durch falsche Anmeldung...5 5. Unterbrechung
2 Echtzeitbetriebssysteme
 35 2 Echtzeitbetriebssysteme In den letzten Jahren hat sich die Automobilindustrie zu einem der wesentlichen Anwender von Echtzeitbetriebssystemen für eingebettete Systeme entwickelt. Relativ zeitig erkannten
35 2 Echtzeitbetriebssysteme In den letzten Jahren hat sich die Automobilindustrie zu einem der wesentlichen Anwender von Echtzeitbetriebssystemen für eingebettete Systeme entwickelt. Relativ zeitig erkannten
Projektplan(ung) zu CYOUTOO
 zu CYOUTOO") Seite 1 von 8 Projektplan(ung) zu CYOUTOO Inhalt Allgemeines 2 Die Meilensteine 3 Geplante Meilensteine des Projekts 3 Projektziel 1 4 Zielerläuterung 4 Meilensteine zu Projektziel 1. 4 Ergebnis 4 Projektziel
Seite 1 von 8 Projektplan(ung) zu CYOUTOO Inhalt Allgemeines 2 Die Meilensteine 3 Geplante Meilensteine des Projekts 3 Projektziel 1 4 Zielerläuterung 4 Meilensteine zu Projektziel 1. 4 Ergebnis 4 Projektziel
Eine Logikschaltung zur Addition zweier Zahlen
 Eine Logikschaltung zur Addition zweier Zahlen Grundlegender Ansatz für die Umsetzung arithmetischer Operationen als elektronische Schaltung ist die Darstellung von Zahlen im Binärsystem. Eine Logikschaltung
Eine Logikschaltung zur Addition zweier Zahlen Grundlegender Ansatz für die Umsetzung arithmetischer Operationen als elektronische Schaltung ist die Darstellung von Zahlen im Binärsystem. Eine Logikschaltung
Java Enterprise Architekturen Willkommen in der Realität
 Java Enterprise Architekturen Willkommen in der Realität Ralf Degner (Ralf.Degner@tk-online.de), Dr. Frank Griffel (Dr.Frank.Griffel@tk-online.de) Techniker Krankenkasse Häufig werden Mehrschichtarchitekturen
Java Enterprise Architekturen Willkommen in der Realität Ralf Degner (Ralf.Degner@tk-online.de), Dr. Frank Griffel (Dr.Frank.Griffel@tk-online.de) Techniker Krankenkasse Häufig werden Mehrschichtarchitekturen
Fragebogen ISONORM 9241/110-S
 Fragebogen ISONORM 9241/110-S Beurteilung von Software auf Grundlage der Internationalen Ergonomie-Norm DIN EN ISO 9241-110 von Prof. Dr. Jochen Prümper www.seikumu.de Fragebogen ISONORM 9241/110-S Seite
Fragebogen ISONORM 9241/110-S Beurteilung von Software auf Grundlage der Internationalen Ergonomie-Norm DIN EN ISO 9241-110 von Prof. Dr. Jochen Prümper www.seikumu.de Fragebogen ISONORM 9241/110-S Seite
OSEK / OSEKtime Ausgewählte Kapitel eingebetteter Systeme
 OSEK / OSEKtime Ausgewählte Kapitel eingebetteter Systeme Wilhelm Haas Wilhelm.Haas@informatik.stud.uni-erlangen.de Friedrich-Alexander-Universität Erlangen-Nürnberg Institut für Informatik Lehrstuhl 4
OSEK / OSEKtime Ausgewählte Kapitel eingebetteter Systeme Wilhelm Haas Wilhelm.Haas@informatik.stud.uni-erlangen.de Friedrich-Alexander-Universität Erlangen-Nürnberg Institut für Informatik Lehrstuhl 4
Anleitung zum Computercheck Windows Firewall aktivieren oder eine kostenlose Firewall installieren
 Anleitung zum Computercheck Windows Firewall aktivieren oder eine kostenlose Firewall installieren Ziel der Anleitung Sie möchten ein modernes Firewallprogramm für Ihren Computer installieren, um gegen
Anleitung zum Computercheck Windows Firewall aktivieren oder eine kostenlose Firewall installieren Ziel der Anleitung Sie möchten ein modernes Firewallprogramm für Ihren Computer installieren, um gegen
1 Einleitung. Lernziele. automatische Antworten bei Abwesenheit senden. Einstellungen für automatische Antworten Lerndauer. 4 Minuten.
 1 Einleitung Lernziele automatische Antworten bei Abwesenheit senden Einstellungen für automatische Antworten Lerndauer 4 Minuten Seite 1 von 18 2 Antworten bei Abwesenheit senden» Outlook kann während
1 Einleitung Lernziele automatische Antworten bei Abwesenheit senden Einstellungen für automatische Antworten Lerndauer 4 Minuten Seite 1 von 18 2 Antworten bei Abwesenheit senden» Outlook kann während
Fachbericht zum Thema: Anforderungen an ein Datenbanksystem
 Fachbericht zum Thema: Anforderungen an ein Datenbanksystem von André Franken 1 Inhaltsverzeichnis 1 Inhaltsverzeichnis 1 2 Einführung 2 2.1 Gründe für den Einsatz von DB-Systemen 2 2.2 Definition: Datenbank
Fachbericht zum Thema: Anforderungen an ein Datenbanksystem von André Franken 1 Inhaltsverzeichnis 1 Inhaltsverzeichnis 1 2 Einführung 2 2.1 Gründe für den Einsatz von DB-Systemen 2 2.2 Definition: Datenbank
Begriff: Scheduling Planung, Schedule Plan. Verplanung der CPU-Zeit an die Threads (bzw. Prozesse)
") 5 CPU-Scheduling Im folgenden wird von Threads gesprochen. Bei Systemen, die keine Threads unterstützen, ist der einzige "Thread" eines Prozesses gemeint. Früher wurde dieser Thread synonym mit dem Begriff
5 CPU-Scheduling Im folgenden wird von Threads gesprochen. Bei Systemen, die keine Threads unterstützen, ist der einzige "Thread" eines Prozesses gemeint. Früher wurde dieser Thread synonym mit dem Begriff
Internet Explorer Version 6
 Internet Explorer Version 6 Java Runtime Ist Java Runtime nicht installiert, öffnet sich ein PopUp-Fenster, welches auf das benötigte Plugin aufmerksam macht. Nach Klicken auf die OK-Taste im PopUp-Fenster
Internet Explorer Version 6 Java Runtime Ist Java Runtime nicht installiert, öffnet sich ein PopUp-Fenster, welches auf das benötigte Plugin aufmerksam macht. Nach Klicken auf die OK-Taste im PopUp-Fenster
Mindestanforderungen an. Inland ECDIS Geräte im Informationsmodus und vergleichbare Kartenanzeigegeräte. zur Nutzung von Inland AIS Daten
 Protokoll 2014-I-12, Anlage 2 Mindestanforderungen an Inland ECDIS Geräte im Informationsmodus und vergleichbare Kartenanzeigegeräte zur Nutzung von Inland AIS Daten an Bord von Fahrzeugen 12.6.2014 Seite
Protokoll 2014-I-12, Anlage 2 Mindestanforderungen an Inland ECDIS Geräte im Informationsmodus und vergleichbare Kartenanzeigegeräte zur Nutzung von Inland AIS Daten an Bord von Fahrzeugen 12.6.2014 Seite
Wann ist eine Software in Medizinprodukte- Aufbereitungsabteilungen ein Medizinprodukt?
 DGSV-Kongress 2009 Wann ist eine Software in Medizinprodukte- Aufbereitungsabteilungen ein Medizinprodukt? Sybille Andrée Betriebswirtin für und Sozialmanagement (FH-SRH) Prokuristin HSD Händschke Software
DGSV-Kongress 2009 Wann ist eine Software in Medizinprodukte- Aufbereitungsabteilungen ein Medizinprodukt? Sybille Andrée Betriebswirtin für und Sozialmanagement (FH-SRH) Prokuristin HSD Händschke Software
Fragen und Antworten zum Thema. Lieferanspruch
 Fragen und Antworten zum Thema Lieferanspruch Was ist der Lieferanspruch und warum tritt er in Kraft? Der Lieferanspruch ist in den Satzungen der Nordzucker Holding AG und der Union-Zucker Südhannover
Fragen und Antworten zum Thema Lieferanspruch Was ist der Lieferanspruch und warum tritt er in Kraft? Der Lieferanspruch ist in den Satzungen der Nordzucker Holding AG und der Union-Zucker Südhannover
Lizenzierung von System Center 2012
 Lizenzierung von System Center 2012 Mit den Microsoft System Center-Produkten lassen sich Endgeräte wie Server, Clients und mobile Geräte mit unterschiedlichen Betriebssystemen verwalten. Verwalten im
Lizenzierung von System Center 2012 Mit den Microsoft System Center-Produkten lassen sich Endgeräte wie Server, Clients und mobile Geräte mit unterschiedlichen Betriebssystemen verwalten. Verwalten im
gallestro BPM - weit mehr als malen...
 Ob gallestro das richtige Tool für Ihr Unternehmen ist, können wir ohne weitere rmationen nicht beurteilen und lassen hier die Frage offen. In dieser rmationsreihe möchten wir Ihre Entscheidungsfindung
Ob gallestro das richtige Tool für Ihr Unternehmen ist, können wir ohne weitere rmationen nicht beurteilen und lassen hier die Frage offen. In dieser rmationsreihe möchten wir Ihre Entscheidungsfindung
Übungen zur Softwaretechnik
 Technische Universität München Fakultät für Informatik Lehrstuhl IV: Software & Systems Engineering Markus Pister, Dr. Bernhard Rumpe WS 2002/2003 Lösungsblatt 9 17. Dezember 2002 www4.in.tum.de/~rumpe/se
Technische Universität München Fakultät für Informatik Lehrstuhl IV: Software & Systems Engineering Markus Pister, Dr. Bernhard Rumpe WS 2002/2003 Lösungsblatt 9 17. Dezember 2002 www4.in.tum.de/~rumpe/se
Kontaktlos bezahlen mit Visa
 Visa. Und das Leben läuft leichter Kurzanleitung für Beschäftigte im Handel Kontaktlos bezahlen mit Visa Was bedeutet kontaktloses Bezahlen? Immer mehr Kunden können heute schon kontaktlos bezahlen! Statt
Visa. Und das Leben läuft leichter Kurzanleitung für Beschäftigte im Handel Kontaktlos bezahlen mit Visa Was bedeutet kontaktloses Bezahlen? Immer mehr Kunden können heute schon kontaktlos bezahlen! Statt
Prof. Dr. Uwe Schmidt. 21. August 2007. Aufgaben zur Klausur Objektorientierte Programmierung im SS 2007 (IA 252)
") Prof. Dr. Uwe Schmidt 21. August 2007 Aufgaben zur Klausur Objektorientierte Programmierung im SS 2007 (IA 252) Zeit: 75 Minuten erlaubte Hilfsmittel: keine Bitte tragen Sie Ihre Antworten und fertigen
Prof. Dr. Uwe Schmidt 21. August 2007 Aufgaben zur Klausur Objektorientierte Programmierung im SS 2007 (IA 252) Zeit: 75 Minuten erlaubte Hilfsmittel: keine Bitte tragen Sie Ihre Antworten und fertigen
Funktionaler Zusammenhang. Lehrplan Realschule
 Funktionaler Bildungsstandards Lehrplan Realschule Die Schülerinnen und Schüler nutzen Funktionen als Mittel zur Beschreibung quantitativer Zusammenhänge, erkennen und beschreiben funktionale Zusammenhänge
Funktionaler Bildungsstandards Lehrplan Realschule Die Schülerinnen und Schüler nutzen Funktionen als Mittel zur Beschreibung quantitativer Zusammenhänge, erkennen und beschreiben funktionale Zusammenhänge
Noten ausrechnen mit Excel/Tabellenkalkulation. 1) Individuellen Notenschlüssel/Punkteschlüssel erstellen
 Individuellen Notenschlüssel/Punkteschlüssel erstellen") Noten ausrechnen mit Excel/Tabellenkalkulation online unter: www.lehrerfreund.de/in/schule/1s/notenschluessel-excel Dies ist eine Einführung in die Funktionen von Excel, die Sie brauchen, um Noten und
Noten ausrechnen mit Excel/Tabellenkalkulation online unter: www.lehrerfreund.de/in/schule/1s/notenschluessel-excel Dies ist eine Einführung in die Funktionen von Excel, die Sie brauchen, um Noten und
Database Exchange Manager. Infinqa IT Solutions GmbH, Berlin Stralauer Allee 2 10245 Berlin Tel.:+49(0) 30 2900 8639 Fax.:+49(0) 30 2900 8695
 30 2900 8639 Fax.:+49(0) 30 2900 8695") Database Exchange Manager Replication Service- schematische Darstellung Replication Service- allgemeines Replikation von Daten von bzw. in ein SAP-System und einer relationalen DMS-Datenbank Kombination
Database Exchange Manager Replication Service- schematische Darstellung Replication Service- allgemeines Replikation von Daten von bzw. in ein SAP-System und einer relationalen DMS-Datenbank Kombination
Häufig wiederkehrende Fragen zur mündlichen Ergänzungsprüfung im Einzelnen:
 Mündliche Ergänzungsprüfung bei gewerblich-technischen und kaufmännischen Ausbildungsordnungen bis zum 31.12.2006 und für alle Ausbildungsordnungen ab 01.01.2007 Am 13. Dezember 2006 verabschiedete der
Mündliche Ergänzungsprüfung bei gewerblich-technischen und kaufmännischen Ausbildungsordnungen bis zum 31.12.2006 und für alle Ausbildungsordnungen ab 01.01.2007 Am 13. Dezember 2006 verabschiedete der
9001 weitere (kleinere) Änderungen
 Änderungen") 6.2 Ziele: SMARTE Ziele: was, Ressorucen, Verantwortung, Termin, Bewertung der Ergebnisse (für ecco nicht nue, wurde aber betont) 6.3 Änderungen: Der Einfluss von Änderungen am QMS uss bewertet werden
6.2 Ziele: SMARTE Ziele: was, Ressorucen, Verantwortung, Termin, Bewertung der Ergebnisse (für ecco nicht nue, wurde aber betont) 6.3 Änderungen: Der Einfluss von Änderungen am QMS uss bewertet werden
Buddy - Algorithmus Handbuch für Endnutzer Stand 02.08.2005
 Buddy - Algorithmus Handbuch für Endnutzer Stand 02.08.2005 1. Vorwort 1 2. Systemvoraussetzungen 2 3. Programmarten 2 4. Sicherheit der Endnutzer 2 5. Handhabung 3 5.1 allgemeine Programmübersicht 3 5.2
Buddy - Algorithmus Handbuch für Endnutzer Stand 02.08.2005 1. Vorwort 1 2. Systemvoraussetzungen 2 3. Programmarten 2 4. Sicherheit der Endnutzer 2 5. Handhabung 3 5.1 allgemeine Programmübersicht 3 5.2
Zuverlässiger IT-Service und Support Wir haben Ihr EDV-System im Griff.
 Zuverlässiger IT-Service und Support Wir haben Ihr EDV-System im Griff. Überblick über unser Leistungsspektrum Wir kümmern uns um Ihre EDV-Anlage. Die IT muss laufen, zu jeder Zeit. Das ist die Anforderung
Zuverlässiger IT-Service und Support Wir haben Ihr EDV-System im Griff. Überblick über unser Leistungsspektrum Wir kümmern uns um Ihre EDV-Anlage. Die IT muss laufen, zu jeder Zeit. Das ist die Anforderung
Handbucherweiterung Zuschlag
 Handbucherweiterung Zuschlag Inhalt 1. Allgemeines S. 1 2. Installation S. 1 3. Erweiterungen bei den Zeitplänen S. 1 4. Erweiterung der Baumstruktur S. 2 5. Erweiterung im Personalstamm S. 2 6. Erweiterung
Handbucherweiterung Zuschlag Inhalt 1. Allgemeines S. 1 2. Installation S. 1 3. Erweiterungen bei den Zeitplänen S. 1 4. Erweiterung der Baumstruktur S. 2 5. Erweiterung im Personalstamm S. 2 6. Erweiterung
Broadband Connectivity Services
 Ausgabedatum 109.2013 Ersetzt Version 1-1 Vertrag Vertrag betreffend 1/6 Inhaltsverzeichnis 1 Einleitung... 3 2 Qualitätsübersicht BBCS Anschluss... 3 1 Qualitätsvereinbarungen... 4 2 Vertragsstrafen...
Ausgabedatum 109.2013 Ersetzt Version 1-1 Vertrag Vertrag betreffend 1/6 Inhaltsverzeichnis 1 Einleitung... 3 2 Qualitätsübersicht BBCS Anschluss... 3 1 Qualitätsvereinbarungen... 4 2 Vertragsstrafen...
Anleitung zur Einrichtung von Kontoweckern im Online Banking
 Anleitung zur Einrichtung von Kontoweckern im Online Banking 1. Klicken Sie in der Menüleiste links auf Kontowecker. Klicken Sie auf Zur Freischaltung um den Kontowecker zu aktivieren. 2. Bitte lesen und
Anleitung zur Einrichtung von Kontoweckern im Online Banking 1. Klicken Sie in der Menüleiste links auf Kontowecker. Klicken Sie auf Zur Freischaltung um den Kontowecker zu aktivieren. 2. Bitte lesen und
SWT II Projekt. Chat - Anwendung. Pflichtenheft 2000 SWT
 SWT II Projekt Chat - Anwendung Pflichtenheft 2000 SWT i Versionen Datum Version Beschreibung Autor 3.11.2000 1.0 erste Version Dietmar Matthes ii Inhaltsverzeichnis 1. ZWECK... 1 1.1. RAHMEN... 1 1.2.
SWT II Projekt Chat - Anwendung Pflichtenheft 2000 SWT i Versionen Datum Version Beschreibung Autor 3.11.2000 1.0 erste Version Dietmar Matthes ii Inhaltsverzeichnis 1. ZWECK... 1 1.1. RAHMEN... 1 1.2.
Wichtiges Thema: Ihre private Rente und der viel zu wenig beachtete - Rentenfaktor
 Wichtiges Thema: Ihre private Rente und der viel zu wenig beachtete - Rentenfaktor Ihre private Gesamtrente setzt sich zusammen aus der garantierten Rente und der Rente, die sich aus den über die Garantieverzinsung
Wichtiges Thema: Ihre private Rente und der viel zu wenig beachtete - Rentenfaktor Ihre private Gesamtrente setzt sich zusammen aus der garantierten Rente und der Rente, die sich aus den über die Garantieverzinsung
Nüchtern betrachtet führt jegliche Wissenschaft lediglich zum vorläufig letzten Irrtum. (Kafka)
") Nüchtern betrachtet führt jegliche Wissenschaft lediglich zum vorläufig letzten Irrtum. (Kafka) Funktionale Sicherheit bei baurechtlich vorgeschriebenen sicherheitstechnischen Anlagen Folie: 1 Funktionale
Nüchtern betrachtet führt jegliche Wissenschaft lediglich zum vorläufig letzten Irrtum. (Kafka) Funktionale Sicherheit bei baurechtlich vorgeschriebenen sicherheitstechnischen Anlagen Folie: 1 Funktionale
Das digitale Klassenund Notizbuch
 Das digitale Klassenund Notizbuch Datenschutzrechtliche Rahmenbedingungen Tel.: 0431/9881207 Fax: 0431/9881223 Email:ULD21@datenschutzzentrum.de www.datenschutz.de 30 Abs. 2 SchulG Die Daten der Schulverwaltung
Das digitale Klassenund Notizbuch Datenschutzrechtliche Rahmenbedingungen Tel.: 0431/9881207 Fax: 0431/9881223 Email:ULD21@datenschutzzentrum.de www.datenschutz.de 30 Abs. 2 SchulG Die Daten der Schulverwaltung
Programmierung mit NQC: Kommunikation zwischen zwei RCX
 Programmierung mit NQC: Kommunikation zwischen zwei RCX Martin Schmidt Aufbau der Messages Messages müssen möglichst kurz sein und dürfen nicht zu häufig gesendet werden! 1 Byte reicht für unsere Zwecke
Programmierung mit NQC: Kommunikation zwischen zwei RCX Martin Schmidt Aufbau der Messages Messages müssen möglichst kurz sein und dürfen nicht zu häufig gesendet werden! 1 Byte reicht für unsere Zwecke
Sicherheit im Online-Banking. Verfahren und Möglichkeiten
 Sicherheit im Online-Banking Verfahren und Möglichkeiten Auf unterschiedlichen Wegen an das gleiche Ziel: Sicherheit im Online-Banking Wie sicher ist Online-Banking? Diese Frage stellt sich den Bankkunden
Sicherheit im Online-Banking Verfahren und Möglichkeiten Auf unterschiedlichen Wegen an das gleiche Ziel: Sicherheit im Online-Banking Wie sicher ist Online-Banking? Diese Frage stellt sich den Bankkunden
Systeme 1. Kapitel 10. Virtualisierung
 Systeme 1 Kapitel 10 Virtualisierung Virtualisierung Virtualisierung: Definition: Der Begriff Virtualisierung beschreibt eine Abstraktion von Computerhardware hin zu einer virtuellen Maschine. Tatsächlich
Systeme 1 Kapitel 10 Virtualisierung Virtualisierung Virtualisierung: Definition: Der Begriff Virtualisierung beschreibt eine Abstraktion von Computerhardware hin zu einer virtuellen Maschine. Tatsächlich
Bildquelle: http://bild2.qimage.de/diamant-computergesteuerte-naehmaschine-foto-bild-86314142.jpg
 Bildquelle: http://bild2.qimage.de/diamant-computergesteuerte-naehmaschine-foto-bild-86314142.jpg Unsere digitale Welt konfrontiert uns mit einer Unmenge an computergesteuerten Geräten, Maschinen und Steueranlagen.
Bildquelle: http://bild2.qimage.de/diamant-computergesteuerte-naehmaschine-foto-bild-86314142.jpg Unsere digitale Welt konfrontiert uns mit einer Unmenge an computergesteuerten Geräten, Maschinen und Steueranlagen.
Easy-Monitoring Universelle Sensor Kommunikations und Monitoring Plattform
 Easy-Monitoring Universelle Sensor Kommunikations und Monitoring Plattform Eberhard Baur Informatik Schützenstraße 24 78315 Radolfzell Germany Tel. +49 (0)7732 9459330 Fax. +49 (0)7732 9459332 Email: mail@eb-i.de
Easy-Monitoring Universelle Sensor Kommunikations und Monitoring Plattform Eberhard Baur Informatik Schützenstraße 24 78315 Radolfzell Germany Tel. +49 (0)7732 9459330 Fax. +49 (0)7732 9459332 Email: mail@eb-i.de
Installation des Authorware Webplayers für den Internet Explorer unter Windows Vista
 Installation des Authorware Webplayers für den Internet Explorer unter Windows Vista Allgemeines: Bitte lesen Sie sich diese Anleitung zuerst einmal komplett durch. Am Besten, Sie drucken sich diese Anleitung
Installation des Authorware Webplayers für den Internet Explorer unter Windows Vista Allgemeines: Bitte lesen Sie sich diese Anleitung zuerst einmal komplett durch. Am Besten, Sie drucken sich diese Anleitung
Projekte Packen, Kopieren und Versenden
 Projekte Packen, Kopieren und Versenden In diesem Hotline Tipp wird erklärt, wie Sie Projekte oder Positionen Packen, Verschieben oder als Anhang einer E-Mail Versenden. Ausgeführt werden diese Befehle
Projekte Packen, Kopieren und Versenden In diesem Hotline Tipp wird erklärt, wie Sie Projekte oder Positionen Packen, Verschieben oder als Anhang einer E-Mail Versenden. Ausgeführt werden diese Befehle
3.14 Die Programmieroberfläche Programmierung
 121 3.14 Die Programmieroberfläche Programmierung Besonderheiten Die Oberflächen der einzelnen Quellen (3S, KW-Software, Siemens-TIA-Portal, logi.cad 3, PAS4000) sind in sich unterschiedlich. Aber auch
121 3.14 Die Programmieroberfläche Programmierung Besonderheiten Die Oberflächen der einzelnen Quellen (3S, KW-Software, Siemens-TIA-Portal, logi.cad 3, PAS4000) sind in sich unterschiedlich. Aber auch
Der Schutz von Patientendaten
 Der Schutz von Patientendaten bei (vernetzten) Software-Medizinprodukten aus Herstellersicht 18.09.2014 Gerald Spyra, LL.M. Kanzlei Spyra Vorstellung meiner Person Gerald Spyra, LL.M. Rechtsanwalt Spezialisiert
Der Schutz von Patientendaten bei (vernetzten) Software-Medizinprodukten aus Herstellersicht 18.09.2014 Gerald Spyra, LL.M. Kanzlei Spyra Vorstellung meiner Person Gerald Spyra, LL.M. Rechtsanwalt Spezialisiert
Client-Systemanforderungen für Brainloop Secure Dataroom ab Version 8.30
 Client-Systemanforderungen für Brainloop Secure Dataroom ab Version 8.30 Copyright Brainloop AG, 2004-2014. Alle Rechte vorbehalten. Dokumentenversion 2.0 Sämtliche verwendeten Markennamen und Markenzeichen
Client-Systemanforderungen für Brainloop Secure Dataroom ab Version 8.30 Copyright Brainloop AG, 2004-2014. Alle Rechte vorbehalten. Dokumentenversion 2.0 Sämtliche verwendeten Markennamen und Markenzeichen
Wenn Sie Zug um Zug den künftigen Anforderungen gerecht werden wollen
 Wenn Sie Zug um Zug den künftigen Anforderungen gerecht werden wollen Schleupen.CS 3.0 die neue prozessorientierte Business Plattform Geschäftsprozesse automatisiert und individuell Branchenfokus: CRM,
Wenn Sie Zug um Zug den künftigen Anforderungen gerecht werden wollen Schleupen.CS 3.0 die neue prozessorientierte Business Plattform Geschäftsprozesse automatisiert und individuell Branchenfokus: CRM,
3D Visualisierung von UML Umgebungsmodellen
 3D Visualisierung von UML Umgebungsmodellen Vortragender: Helmer Krämer Betreuer: Dr. Holger Giese 3D Visualisierung von UML Umgebungsmodellen Krämer Seite 1 Motivation und Anforderungen Das Umgebungsmodell
3D Visualisierung von UML Umgebungsmodellen Vortragender: Helmer Krämer Betreuer: Dr. Holger Giese 3D Visualisierung von UML Umgebungsmodellen Krämer Seite 1 Motivation und Anforderungen Das Umgebungsmodell
Windows Server 2008 (R2): Anwendungsplattform
: Anwendungsplattform") Mag. Christian Zahler, Stand: August 2011 13 14 Mag. Christian Zahler, Stand: August 2011 Mag. Christian Zahler, Stand: August 2011 15 1.5.2 Remotedesktop-Webverbindung Windows Server 2008 (R2): Anwendungsplattform
Mag. Christian Zahler, Stand: August 2011 13 14 Mag. Christian Zahler, Stand: August 2011 Mag. Christian Zahler, Stand: August 2011 15 1.5.2 Remotedesktop-Webverbindung Windows Server 2008 (R2): Anwendungsplattform
Im Folgenden werden einige typische Fallkonstellationen beschrieben, in denen das Gesetz den Betroffenen in der GKV hilft:
 Im Folgenden werden einige typische Fallkonstellationen beschrieben, in denen das Gesetz den Betroffenen in der GKV hilft: Hinweis: Die im Folgenden dargestellten Fallkonstellationen beziehen sich auf
Im Folgenden werden einige typische Fallkonstellationen beschrieben, in denen das Gesetz den Betroffenen in der GKV hilft: Hinweis: Die im Folgenden dargestellten Fallkonstellationen beziehen sich auf
Agile Vorgehensmodelle in der Softwareentwicklung: Scrum
 C A R L V O N O S S I E T Z K Y Agile Vorgehensmodelle in der Softwareentwicklung: Scrum Johannes Diemke Vortrag im Rahmen der Projektgruppe Oldenburger Robot Soccer Team im Wintersemester 2009/2010 Was
C A R L V O N O S S I E T Z K Y Agile Vorgehensmodelle in der Softwareentwicklung: Scrum Johannes Diemke Vortrag im Rahmen der Projektgruppe Oldenburger Robot Soccer Team im Wintersemester 2009/2010 Was
impact ordering Info Produktkonfigurator
 impact ordering Info Copyright Copyright 2013 veenion GmbH Alle Rechte vorbehalten. Kein Teil der Dokumentation darf in irgendeiner Form ohne schriftliche Genehmigung der veenion GmbH reproduziert, verändert
impact ordering Info Copyright Copyright 2013 veenion GmbH Alle Rechte vorbehalten. Kein Teil der Dokumentation darf in irgendeiner Form ohne schriftliche Genehmigung der veenion GmbH reproduziert, verändert
Eine Bürokratiekostenfolgenabschätzung zum zweiten Gesetz für moderne Dienstleistungen am Arbeitsmarkt im Hinblick auf die Einführung einer Gleitzone
 Eine Bürokratiekostenfolgenabschätzung zum zweiten Gesetz für moderne Dienstleistungen am Arbeitsmarkt im Hinblick auf die Einführung einer Gleitzone Das IWP Institut für Wirtschafts- und Politikforschung
Eine Bürokratiekostenfolgenabschätzung zum zweiten Gesetz für moderne Dienstleistungen am Arbeitsmarkt im Hinblick auf die Einführung einer Gleitzone Das IWP Institut für Wirtschafts- und Politikforschung
Erfassung von Umgebungskontext und Kontextmanagement
 Erfassung von Umgebungskontext und Kontextmanagement Jörg Schneider, Christian Mannweiler, Andreas Klein, Hans D. Schotten 13.05.2009 Inhalt 1. Einleitung 2. Anforderungen 3. Kontext Erfassung und Verteilung
Erfassung von Umgebungskontext und Kontextmanagement Jörg Schneider, Christian Mannweiler, Andreas Klein, Hans D. Schotten 13.05.2009 Inhalt 1. Einleitung 2. Anforderungen 3. Kontext Erfassung und Verteilung
Grundlagen der Technischen Informatik. Sequenzielle Netzwerke. Institut für Kommunikationsnetze und Rechnersysteme. Paul J. Kühn, Matthias Meyer
 Institut für Kommunikationsnetze und Rechnersysteme Grundlagen der Technischen Informatik Paul J. Kühn, Matthias Meyer Übung 2 Sequenzielle Netzwerke Inhaltsübersicht Aufgabe 2.1 Aufgabe 2.2 Prioritäts-Multiplexer
Institut für Kommunikationsnetze und Rechnersysteme Grundlagen der Technischen Informatik Paul J. Kühn, Matthias Meyer Übung 2 Sequenzielle Netzwerke Inhaltsübersicht Aufgabe 2.1 Aufgabe 2.2 Prioritäts-Multiplexer
Handbuch. timecard Connector 1.0.0. Version: 1.0.0. REINER SCT Kartengeräte GmbH & Co. KG Goethestr. 14 78120 Furtwangen
 Handbuch timecard Connector 1.0.0 Version: 1.0.0 REINER SCT Kartengeräte GmbH & Co. KG Goethestr. 14 78120 Furtwangen Furtwangen, den 18.11.2011 Inhaltsverzeichnis Seite 1 Einführung... 3 2 Systemvoraussetzungen...
Handbuch timecard Connector 1.0.0 Version: 1.0.0 REINER SCT Kartengeräte GmbH & Co. KG Goethestr. 14 78120 Furtwangen Furtwangen, den 18.11.2011 Inhaltsverzeichnis Seite 1 Einführung... 3 2 Systemvoraussetzungen...
auf Frauen und Männer in gleicher Weise bezogen. 1 Alle maskulinen Bezeichnungen von Personen und Funktionsträgern in dieser Satzung sind
 Fachprüfungsordnung für das Aufbaustudium Informatik an der Technischen Universität München 1 Vom 07.08.1996 Aufgrund des Art. 6 i.v.m. Art. 81 Absatz 1 des Bayerischen Hochschulgesetzes (BayHSchG) erläßt
Fachprüfungsordnung für das Aufbaustudium Informatik an der Technischen Universität München 1 Vom 07.08.1996 Aufgrund des Art. 6 i.v.m. Art. 81 Absatz 1 des Bayerischen Hochschulgesetzes (BayHSchG) erläßt
I N F O R M A T I O N V I R T U A L I S I E R U N G. Wir schützen Ihre Unternehmenswerte
 I N F O R M A T I O N V I R T U A L I S I E R U N G Wir schützen Ihre Unternehmenswerte Wir schützen Ihre Unternehmenswerte Ausfallsicherheit durch Virtualisierung Die heutigen Anforderungen an IT-Infrastrukturen
I N F O R M A T I O N V I R T U A L I S I E R U N G Wir schützen Ihre Unternehmenswerte Wir schützen Ihre Unternehmenswerte Ausfallsicherheit durch Virtualisierung Die heutigen Anforderungen an IT-Infrastrukturen
Microsoft Office Visio 2007 Infotag SemTalk Thema: Prozessmodellierung
 Microsoft Office Visio 2007 Infotag SemTalk Thema: Prozessmodellierung Dr.-Ing. Frauke Weichhardt, Semtation GmbH Christian Fillies, Semtation GmbH Claus Quast, Microsoft Deutschland GmbH Prozessmodellierung
Microsoft Office Visio 2007 Infotag SemTalk Thema: Prozessmodellierung Dr.-Ing. Frauke Weichhardt, Semtation GmbH Christian Fillies, Semtation GmbH Claus Quast, Microsoft Deutschland GmbH Prozessmodellierung
Exkurs: Formatvorlage für Anforderungsanalyse-Dokument
 Exkurs zu Kapitel Anforderungserhebung und analyse Exkurs: Formatvorlage für Anforderungsanalyse-Dokument Folgendes entspricht im Wesentlichen IEEE-Standard 830-1998 R O O T S Formatvorlage Anforderungsanalyse
Exkurs zu Kapitel Anforderungserhebung und analyse Exkurs: Formatvorlage für Anforderungsanalyse-Dokument Folgendes entspricht im Wesentlichen IEEE-Standard 830-1998 R O O T S Formatvorlage Anforderungsanalyse
ClickProfile Mobile. Leitfaden Client. Ihre Vision ist unsere Aufgabe
 ClickProfile Mobile Leitfaden Client 1. Einleitung ClickProfile Mobile ist eine Zusatzanwendung für die Telefonzentrale Vannessa. Mit dieser Anwendung ist es den Benutzern von Vannessa möglich, Ihre Profile
ClickProfile Mobile Leitfaden Client 1. Einleitung ClickProfile Mobile ist eine Zusatzanwendung für die Telefonzentrale Vannessa. Mit dieser Anwendung ist es den Benutzern von Vannessa möglich, Ihre Profile
SAFEYTEAMS-Newsletter Nr. 5
 CE-Kennzeichnung I Gefahrenanalysen I Maschinen-Prüfungen I Workshops I Seminare SAFEYTEAMS-Newsletter Nr. 5 Thema Bedeutung des Performance-Levels (PL) Definition nach Norm EN 13849: Diskreter Level,
CE-Kennzeichnung I Gefahrenanalysen I Maschinen-Prüfungen I Workshops I Seminare SAFEYTEAMS-Newsletter Nr. 5 Thema Bedeutung des Performance-Levels (PL) Definition nach Norm EN 13849: Diskreter Level,
Effiziente Zählerprozesse mit CS.MW_Mobile Workforce
 Effiziente Zählerprozesse mit CS.MW_Mobile Workforce Themen Abbildung der Montageprozesse inkl. der Massenablesung Arbeitsvorbereitung: Optimale Ressourcenplanung Mobile Unterstützung der Mitarbeiter im
Effiziente Zählerprozesse mit CS.MW_Mobile Workforce Themen Abbildung der Montageprozesse inkl. der Massenablesung Arbeitsvorbereitung: Optimale Ressourcenplanung Mobile Unterstützung der Mitarbeiter im
Round-Robin Scheduling (RR)
") RR - Scheduling Reigen-Modell: einfachster, ältester, fairster, am weitesten verbreiteter Algorithmus Entworfen für interaktive Systeme (preemptives Scheduling) Idee: Den Prozessen in der Bereitschaftsschlange
RR - Scheduling Reigen-Modell: einfachster, ältester, fairster, am weitesten verbreiteter Algorithmus Entworfen für interaktive Systeme (preemptives Scheduling) Idee: Den Prozessen in der Bereitschaftsschlange
Local Control Network
 Netzspannungsüberwachung (Stromausfallerkennung) Die Aufgabe Nach einem Stromausfall soll der Status von Aktoren oder Funktionen wieder so hergestellt werden, wie er vor dem Stromausfall war. Die Netzspannungsüberwachung
Netzspannungsüberwachung (Stromausfallerkennung) Die Aufgabe Nach einem Stromausfall soll der Status von Aktoren oder Funktionen wieder so hergestellt werden, wie er vor dem Stromausfall war. Die Netzspannungsüberwachung
Kybernetik Braitenberg Vehikel
 Kybernetik Braitenberg Vehikel Mohamed Oubbati Institut für Neuroinformatik Tel.: (+49) 731 / 50 24153 mohamed.oubbati@uniulm.de 29. 05. 2012 Was ist Kybernetik? environment agent Kybernetik ermöglicht,
Kybernetik Braitenberg Vehikel Mohamed Oubbati Institut für Neuroinformatik Tel.: (+49) 731 / 50 24153 mohamed.oubbati@uniulm.de 29. 05. 2012 Was ist Kybernetik? environment agent Kybernetik ermöglicht,
FAQ. Häufige VoIP-Probleme - - 1 - -5
 FAQ Häufige VoIP-Probleme - - 1 - -5 1. Einleitung Anders als bei der klassischen Telefonie über einen Analog- oder ISDN-Anschluss, nutzt die Placetel- Telefonanlage Ihre Internetverbindung und ist damit
FAQ Häufige VoIP-Probleme - - 1 - -5 1. Einleitung Anders als bei der klassischen Telefonie über einen Analog- oder ISDN-Anschluss, nutzt die Placetel- Telefonanlage Ihre Internetverbindung und ist damit
Whitepaper. Produkt: combit Relationship Manager / address manager. Dateiabgleich im Netzwerk über Offlinedateien
 combit GmbH Untere Laube 30 78462 Konstanz Whitepaper Produkt: combit Relationship Manager / address manager Dateiabgleich im Netzwerk über Offlinedateien Dateiabgleich im Netzwerk über Offlinedateien
combit GmbH Untere Laube 30 78462 Konstanz Whitepaper Produkt: combit Relationship Manager / address manager Dateiabgleich im Netzwerk über Offlinedateien Dateiabgleich im Netzwerk über Offlinedateien
Informatik-Sommercamp 2012. Mastermind mit dem Android SDK
 Mastermind mit dem Android SDK Übersicht Einführungen Mastermind und Strategien (Stefan) Eclipse und das ADT Plugin (Jan) GUI-Programmierung (Dominik) Mastermind und Strategien - Übersicht Mastermind Spielregeln
Mastermind mit dem Android SDK Übersicht Einführungen Mastermind und Strategien (Stefan) Eclipse und das ADT Plugin (Jan) GUI-Programmierung (Dominik) Mastermind und Strategien - Übersicht Mastermind Spielregeln
I P A S M M D Innovative Software zur Prozessoptimierung. Prozessoptimierung durch Mensch-Maschine-Diagramm
 I P A S M M D Innovative Software zur Prozessoptimierung Prozessoptimierung durch Mensch-Maschine-Diagramm Interaktive Fallbeispiele und weitere Informationen unter: www.mitterhauser.com Optimierung durch
I P A S M M D Innovative Software zur Prozessoptimierung Prozessoptimierung durch Mensch-Maschine-Diagramm Interaktive Fallbeispiele und weitere Informationen unter: www.mitterhauser.com Optimierung durch
Bewusster Umgang mit Smartphones
 Bewusster Umgang mit Smartphones Komponenten Hardware OS-Prozessor, Baseband-Prozessor Sensoren Kamera, Mikrofon, GPS, Gyroskop, Kompass,... Netzwerk: WLAN-Adapter, NFC, Bluetooth,... Software Betriebssystem
Bewusster Umgang mit Smartphones Komponenten Hardware OS-Prozessor, Baseband-Prozessor Sensoren Kamera, Mikrofon, GPS, Gyroskop, Kompass,... Netzwerk: WLAN-Adapter, NFC, Bluetooth,... Software Betriebssystem
Kaufvertrag / Mietvertrag / Leasingvertrag über die Lieferung von Hardware und Systemsoftware
 Kaufvertrag / Mietvertrag / Leasingvertrag über die Lieferung von Hardware und Systemsoftware Version Juli 1998-1.01 (Okt. 98) Seite 1 von 5 Vertragsparteien Dieser Vertrag über die Lieferung von Hardware
Kaufvertrag / Mietvertrag / Leasingvertrag über die Lieferung von Hardware und Systemsoftware Version Juli 1998-1.01 (Okt. 98) Seite 1 von 5 Vertragsparteien Dieser Vertrag über die Lieferung von Hardware
Systeme 1. Kapitel 6. Nebenläufigkeit und wechselseitiger Ausschluss
 Systeme 1 Kapitel 6 Nebenläufigkeit und wechselseitiger Ausschluss Threads Die Adressräume verschiedener Prozesse sind getrennt und geschützt gegen den Zugriff anderer Prozesse. Threads sind leichtgewichtige
Systeme 1 Kapitel 6 Nebenläufigkeit und wechselseitiger Ausschluss Threads Die Adressräume verschiedener Prozesse sind getrennt und geschützt gegen den Zugriff anderer Prozesse. Threads sind leichtgewichtige
Bedienungsanleitung. E-Learning Software VedA
 E-Learning Software Inhaltsverzeichnis 1. GUI-Komponenten 2 2. Steuerelemente 3 3. Standard Modus 4 4. Eingabe-Sofort-Verarbeiten Modus 4 5. NC-Programme erstellen 5-1 - 1. GUI-Komponenten - 2 - Abbildung
E-Learning Software Inhaltsverzeichnis 1. GUI-Komponenten 2 2. Steuerelemente 3 3. Standard Modus 4 4. Eingabe-Sofort-Verarbeiten Modus 4 5. NC-Programme erstellen 5-1 - 1. GUI-Komponenten - 2 - Abbildung
Vermeiden Sie es sich bei einer deutlich erfahreneren Person "dranzuhängen", Sie sind persönlich verantwortlich für Ihren Lernerfolg.
 1 2 3 4 Vermeiden Sie es sich bei einer deutlich erfahreneren Person "dranzuhängen", Sie sind persönlich verantwortlich für Ihren Lernerfolg. Gerade beim Einstig in der Programmierung muss kontinuierlich
1 2 3 4 Vermeiden Sie es sich bei einer deutlich erfahreneren Person "dranzuhängen", Sie sind persönlich verantwortlich für Ihren Lernerfolg. Gerade beim Einstig in der Programmierung muss kontinuierlich
Ihre Interessentendatensätze bei inobroker. 1. Interessentendatensätze
 Ihre Interessentendatensätze bei inobroker Wenn Sie oder Ihre Kunden die Prozesse von inobroker nutzen, werden Interessentendatensätze erzeugt. Diese können Sie direkt über inobroker bearbeiten oder mit
Ihre Interessentendatensätze bei inobroker Wenn Sie oder Ihre Kunden die Prozesse von inobroker nutzen, werden Interessentendatensätze erzeugt. Diese können Sie direkt über inobroker bearbeiten oder mit
Client-Systemanforderungen für Brainloop Secure Dataroom ab Version 8.30
 Client-Systemanforderungen für Brainloop Secure Dataroom ab Version 8.30 Copyright Brainloop AG, 2004-2015. Alle Rechte vorbehalten. Dokumentenversion: 1.1 Sämtliche verwendeten Markennamen und Markenzeichen
Client-Systemanforderungen für Brainloop Secure Dataroom ab Version 8.30 Copyright Brainloop AG, 2004-2015. Alle Rechte vorbehalten. Dokumentenversion: 1.1 Sämtliche verwendeten Markennamen und Markenzeichen
Einsatzbearbeitung im Sanitätsdienst
 Einsatzbearbeitung im Sanitätsdienst Vernetzte Einsatzbearbeitung mit dem EDP Web-Share-Server Funktion Web-Share-Server Problematik Bei vielen Einsatzlagen und situationen werden an mehreren Stellen Einsatzführungssysteme
Einsatzbearbeitung im Sanitätsdienst Vernetzte Einsatzbearbeitung mit dem EDP Web-Share-Server Funktion Web-Share-Server Problematik Bei vielen Einsatzlagen und situationen werden an mehreren Stellen Einsatzführungssysteme
Supportkonzept. Datum: 25.02.2012. Inhaltsverzeichnis: 1. Verwendungszweck. 2. 2. Anforderungen 3
 Supportkonzept Datum: 25.02.2012 Inhaltsverzeichnis: 1. Verwendungszweck. 2 2. Anforderungen 3 3. Prozesse 4 3.1. Supportstufen und Organisation 4 3.2. Definition der Prioritäten 5 3.3. Erreichbarkeit
Supportkonzept Datum: 25.02.2012 Inhaltsverzeichnis: 1. Verwendungszweck. 2 2. Anforderungen 3 3. Prozesse 4 3.1. Supportstufen und Organisation 4 3.2. Definition der Prioritäten 5 3.3. Erreichbarkeit
Elektrische Automation. Engineering. Datenaustausch Mechanik Elektrik Software. Aktivitäten des VDMA
 Engineering Datenaustausch Mechanik Elektrik Software Aktivitäten des VDMA Engineering Datenaustausch Mechanik Elektrik Software. VDMA EHB 66415 Seite 1 13.06.2013 Engineering Mechanik Elektrik Software
Engineering Datenaustausch Mechanik Elektrik Software Aktivitäten des VDMA Engineering Datenaustausch Mechanik Elektrik Software. VDMA EHB 66415 Seite 1 13.06.2013 Engineering Mechanik Elektrik Software
Vorbereitung zur Prüfung Echtzeitbetriebssysteme
 Vorbereitung zur Prüfung Echtzeitbetriebssysteme Zugelassene Hilfsmittel: Taschenrechner Bitte verwenden Sie keinen roten Farbstift! 1. Echtzeitbetriebssysteme - Allgemein (15 Punkte) 1.1. Warum setzen
Vorbereitung zur Prüfung Echtzeitbetriebssysteme Zugelassene Hilfsmittel: Taschenrechner Bitte verwenden Sie keinen roten Farbstift! 1. Echtzeitbetriebssysteme - Allgemein (15 Punkte) 1.1. Warum setzen
Informationen zur Lizenzierung von Windows Server 2008 R2
 Informationen zur Lizenzierung von Windows Server 2008 R2 Produktübersicht Windows Server 2008 R2 ist in folgenden Editionen erhältlich: Windows Server 2008 R2 Foundation Jede Lizenz von, Enterprise und
Informationen zur Lizenzierung von Windows Server 2008 R2 Produktübersicht Windows Server 2008 R2 ist in folgenden Editionen erhältlich: Windows Server 2008 R2 Foundation Jede Lizenz von, Enterprise und
Konzept Projekt Lisa
 Konzept Projekt Lisa Konzept für die. Als Basis für die Arbeit gelten die Abmachungen mit Glaxo Smith Kline, welche im Vorfeld dieser Arbeit getroffen wurden. 1.) Lösungsvorschlag Die Lösung besteht aus
Konzept Projekt Lisa Konzept für die. Als Basis für die Arbeit gelten die Abmachungen mit Glaxo Smith Kline, welche im Vorfeld dieser Arbeit getroffen wurden. 1.) Lösungsvorschlag Die Lösung besteht aus
SAP Enterprise Asset Management Maintenance Worker Role
 SAP Enterprise Asset Management Maintenance Worker Role Martin Janssen, EAM Solutions SAP AG June 2012 Public Die neue Benutzeroberfläche für den Techniker Visuelle Instandhaltungsanleitungen 2012 SAP
SAP Enterprise Asset Management Maintenance Worker Role Martin Janssen, EAM Solutions SAP AG June 2012 Public Die neue Benutzeroberfläche für den Techniker Visuelle Instandhaltungsanleitungen 2012 SAP
SDD System Design Document
 SDD Software Konstruktion WS01/02 Gruppe 4 1. Einleitung Das vorliegende Dokument richtet sich vor allem an die Entwickler, aber auch an den Kunden, der das enstehende System verwenden wird. Es soll einen
SDD Software Konstruktion WS01/02 Gruppe 4 1. Einleitung Das vorliegende Dokument richtet sich vor allem an die Entwickler, aber auch an den Kunden, der das enstehende System verwenden wird. Es soll einen
Virtueller Seminarordner Anleitung für die Dozentinnen und Dozenten
 Virtueller Seminarordner Anleitung für die Dozentinnen und Dozenten In dem Virtuellen Seminarordner werden für die Teilnehmerinnen und Teilnehmer des Seminars alle für das Seminar wichtigen Informationen,
Virtueller Seminarordner Anleitung für die Dozentinnen und Dozenten In dem Virtuellen Seminarordner werden für die Teilnehmerinnen und Teilnehmer des Seminars alle für das Seminar wichtigen Informationen,
Anwenderdokumentation AccountPlus GWUPSTAT.EXE
 AccountPlus Inhaltsverzeichnis Inhaltsverzeichnis Anwenderdokumentation AccountPlus GWUPSTAT.EXE (vorläufig) ab Version 6.01 INHALTSVERZEICHNIS...1 1 ALLGEMEINES...2 2 INSTALLATION UND PROGRAMMAUFRUF...2
AccountPlus Inhaltsverzeichnis Inhaltsverzeichnis Anwenderdokumentation AccountPlus GWUPSTAT.EXE (vorläufig) ab Version 6.01 INHALTSVERZEICHNIS...1 1 ALLGEMEINES...2 2 INSTALLATION UND PROGRAMMAUFRUF...2
OSEK / OSEKtime - ein Vergleich
 OSEK / OSEKtime - ein Vergleich Hauptseminar WS 07/08 André Puschmann andre.puschmann@stud.tu-ilmenau.de Technische Universität Ilmenau Fakultät für Informatik und Automatisierung Fachgebiet Rechnerarchitektur
OSEK / OSEKtime - ein Vergleich Hauptseminar WS 07/08 André Puschmann andre.puschmann@stud.tu-ilmenau.de Technische Universität Ilmenau Fakultät für Informatik und Automatisierung Fachgebiet Rechnerarchitektur
Übungsklausur vom 7. Dez. 2007
 Übungsklausur vom 7. Dez. 2007 Ein Lösungsmuster Teilbereiche der Softwaretechnik Software Anforderungen Software Entwurf Software Konstruktion Software Test Software Wartung Software Konfigurationsmanagement
Übungsklausur vom 7. Dez. 2007 Ein Lösungsmuster Teilbereiche der Softwaretechnik Software Anforderungen Software Entwurf Software Konstruktion Software Test Software Wartung Software Konfigurationsmanagement
Installation von Malwarebytes
 Installation von Malwarebytes Ziel der Anleitung Diese Anleitung zeigt Ihnen, wie Sie das Programm Malwarebytes auf Ihrem Computer installieren können. Das kostenlose Programm Malwarebytes findet und entfernt
Installation von Malwarebytes Ziel der Anleitung Diese Anleitung zeigt Ihnen, wie Sie das Programm Malwarebytes auf Ihrem Computer installieren können. Das kostenlose Programm Malwarebytes findet und entfernt
Dämon-Prozesse ( deamon )
") Prozesse unter UNIX - Prozessarten Interaktive Prozesse Shell-Prozesse arbeiten mit stdin ( Tastatur ) und stdout ( Bildschirm ) Dämon-Prozesse ( deamon ) arbeiten im Hintergrund ohne stdin und stdout
Prozesse unter UNIX - Prozessarten Interaktive Prozesse Shell-Prozesse arbeiten mit stdin ( Tastatur ) und stdout ( Bildschirm ) Dämon-Prozesse ( deamon ) arbeiten im Hintergrund ohne stdin und stdout
pro4controlling - Whitepaper [DEU] Whitepaper zur CfMD-Lösung pro4controlling Seite 1 von 9
![pro4controlling - Whitepaper [DEU] Whitepaper zur CfMD-Lösung pro4controlling Seite 1 von 9](/thumbs/27/11531484.jpg "pro4controlling - Whitepaper [DEU] Whitepaper zur CfMD-Lösung pro4controlling Seite 1 von 9") Whitepaper zur CfMD-Lösung pro4controlling Seite 1 von 9 1 Allgemeine Beschreibung "Was war geplant, wo stehen Sie jetzt und wie könnte es noch werden?" Das sind die typischen Fragen, mit denen viele Unternehmer
Whitepaper zur CfMD-Lösung pro4controlling Seite 1 von 9 1 Allgemeine Beschreibung "Was war geplant, wo stehen Sie jetzt und wie könnte es noch werden?" Das sind die typischen Fragen, mit denen viele Unternehmer