Flachheit Eine nützliche Methodik auch für lineare Systeme
|
|
|
- Johannes Reinhold Lange
- vor 5 Jahren
- Abrufe
Transkript
1 Flachheit Eine nützliche Methodik auch für lineare Systeme Michael Zeitz Institut für Systemdynamik Universität Stuttgart Flachheits-Methodik [ FLIESS ET AL. 92ff] Lineare SISO-Systeme zeitinvariant zeitvariant M. Zeitz (Uni Stuttgart) Flachheit Eine nützliche Methodik... Elgersburg / 27
2 Nichtlineares Beispiel: 2-Gelenk-Roboter-Modell u 2 q 2 q R 2 verallgemeinerte Koordinaten M 2 u R 2 Stellmomente u 1 M 1 q 1 Σ : M(q) q + g(q, q) = u, q() = q, q() = q 1 Flacher Ausgang z(t) = q(t), t zur differenziellen Parametrierung Zustand Eingang x(t) = [z T (t), ż T (t)] T u(t) = M(z) z + g(z,ż) z C 2 Σ 1 inverses System x u Folgeregelung z(t) z d (t) mit Trajektorien-Planung z d (t) C 2 Steuerung u d = M(z d ) z d + g(z d,ż d ) Computed Torque Referenz für Zustandsrückführung x d (t) = [z T d (t), żt d (t)] T Exakte Linearisierung z = w neuer Eingang w mit u = M(z)w +g(z,ż) M. Zeitz (Uni Stuttgart) Flachheit Eine nützliche Methodik... Elgersburg / 27
3 Lineares Beispiel: Zeitinvariantes SISO -System Σ : U(s) G(s) Y (s) G(s) = b + b 1 s b m s m a + a 1 s a n s n (n m ) L 1 : (n) y a 1 ẏ + a y = b u + b 1 u b m (m) u (a n = 1) relativer Grad = Differenzgrad : r = n m Speziell: m = r = n Flacher Ausgang (FLA) z(t) = y(t) Zustand x = [ z, ż,..., (n 1) z ] T Eingang u = (a z + a 1 ż (n) z )/b Differenzielle Parametrierung mit z(t) C n Anwendungen : Steuerung u d = (a z d + a 1 ż d (n) z d )/b C x-referenz x d = [ z d, ż d,..., (n 1) z d ] T mit z d (t) C n Frage: Bestimmung von FLA z y für r < n bzw. m >? M. Zeitz (Uni Stuttgart) Flachheit Eine nützliche Methodik... Elgersburg / 27
4 Differenziell flache SISO -Systeme [FLIESS ET AL. 92ff] Σ : ẋ = f (x, u), x() = x R n u y = h(x), u, y R, rel.grad r n Definition: Σ = differenziell flaches SISO-System Σ x y r n z r = n Flacher Ausgang : z = λ(x) R, t mit relativem Grad r = n Differenzielle Parametrierung : Zustand x = Ψ x (z, ż,..., (n 1) z ) Eingang u = Ψ u (z, ż,..., (n) z ) Ausgang y = Ψ y (z, ż,..., (n r) z ) z C n Σ 1 inverses System x u y Anwendung: Flachheitsbasierter Steuerungs- und Regler-Entwurf M. Zeitz (Uni Stuttgart) Flachheit Eine nützliche Methodik... Elgersburg / 27

 M.")
")

5 Regelkreis mit zwei Freiheitsgraden (2FHG) M. Zeitz (Uni Stuttgart) Flachheit Eine nützliche Methodik... Elgersburg / 27

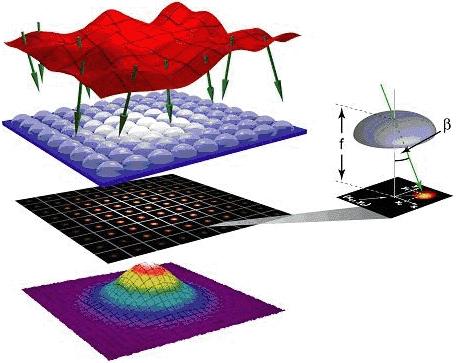


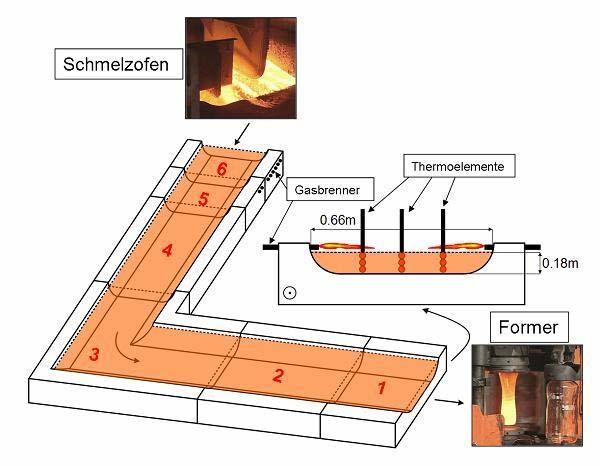

6 Institut für Systemdynamik Anwendungen 2FHG-Folgeregelungen am ISYS Feuerwehr-Drehleiter Hafen-Mobilkran Adaptive Optik Glasspeiser Staustufen-Regelung Stuttgart SmartShell 3
7 Flachheit Eine nützliche Methodik für lineare SISO-Systeme Vortrags-Inhalt Flacher Ausgang / Regler-Normalform Vorsteuerungs-Entwurf 2FHG-Folgeregelung / Beispiel: 3-fach-Pendel Flacher Eingang Zeitvariante SISO-Systeme M. Zeitz (Uni Stuttgart) Flachheit Eine nützliche Methodik... Elgersburg / 27
8 Lineare zeitinvariante SISO - Systeme Σ : ẋ = Ax + b u, x() = x R n, y = c T x, u, y R relativer Grad r : (i) y c T A i 1 b =, i = 1(1)r 1, (r) y c T A r 1 b Konstruktion: Flacher Ausgang z =λ T x mit relativem Grad r =n λ T [b, Ab,...,A n 1 b ] = [,...,, κ ] }{{}}{{} Steuerbark.-Matr. P e T mit RangP =n Σ = steuerbar λ T = e T P 1 letzte P 1 - Zeile multipliziert mit κ FLA-Koordinaten und Regler-Normalform z λ T x ż =... = λ T A... x = T x Transformation Σ Σ (n 1) z λ T A n 1 Σ : (n) z = λ T A n T 1 x + κu, x () = Tx R n, y = c T T 1 x M. Zeitz (Uni Stuttgart) Flachheit Eine nützliche Methodik... Elgersburg / 27
9 Linear-zeitinvariante SISO-Regler-Normalform Σ : (n) z = [ a,..., a n 1 ] x + }{{}}{{} κ u, x () = Tx R n λ T A n T 1 z = x 1 flacher Ausgang (FLA) mit r = n y = [ c1,...,c n r+1,,...,] x }{{} c T T 1 Flachheits-Gleichungen mit FLA z =λ T x C n x = [ z, ż,..., (n 1) z ] T = Tx x = T 1 [ z, ż,..., (n 1) z ] T (n 1) u = (a z + a 1 ż a n 1 z + (n) z )/κ y = c1 z + c 2ż (n r) c n r+1 z mit c n r+1, r n FLA-Koordinaten Zustands-Parametrierung Eingangs-Parametrierung Ausgangs-Parametrierung Anwendung von Σ : Flachheits-basierter Vorsteuerungs-Entwurf M. Zeitz (Uni Stuttgart) Flachheit Eine nützliche Methodik... Elgersburg / 27
10 SISO-Steuerkette mit der inversen Regler-Normalform z Σ d (t) u d (t) x(t) x d (t) d Σ 1 Σ y(t) y d (t) Trajektorien-Planung: Arbeitspunktwechsel x()=x x(t)=x T Σ d : z d () = z = λ T x z d (T) = z T = λ T x T z d (t) C n, t [, T] z T z d (t) z T t Flachheitsbasierter Vorsteuerungs-Entwurf mit Σ 1 u d (t) = Ψ u (z d, ż d,..., (n) z d ) C Steuertrajektorie x d (t) = Ψ x (z d, ż d,..., (n 1) z d ) y d (t) = Ψ y (z d, ż d,..., (n r) z d ) x- Referenz für Zustandsrückführung y- Referenz für Ausgangsregelung M. Zeitz (Uni Stuttgart) Flachheit Eine nützliche Methodik... Elgersburg / 27
11 Flachheits-basierte 2FHG - Regelkreisstruktur Folgeregelung: Ausgang y(t) y d (t) Ψ u u d PID - Entwurf Σ d zd Ψ y y d PID u Σ y Stabilität Störverhalten Robustheit Folgeregelung: Zustand x(t) x d (t) Ψ u u d k T - Entwurf Σ d zd Ψ x x d k T u Σ x y LQR - Optimierung Eigenwert -Vorgabe..... Vorsteuerung {Σ d, Ψ u, Ψ y /Ψ x } add-on für Führungsverhalten M. Zeitz (Uni Stuttgart) Flachheit Eine nützliche Methodik... Elgersburg / 27
12 Beispiel: 3-fach-Pendel [NUTSCH/HAGENMEYER 4] z ϕ 3 Σ : ẋ = f (x, u), x() = x R 8, u R x = [ s, ṡ, ϕ 1, ϕ 1, ϕ 2, ϕ 2, ϕ 3, ϕ 3 ] T ϕ 2 s() s(t) Pendel - Side-Stepping ϕ 1 u = s Σ flaches System TAYLOR-Linearisierung für x 1, A = x f (, ), b = f (, ) u Σ : ẋ = Ax + b u, x() = x R 8, y = [ s, ϕ 1, ϕ 2, ϕ 3 ] T P = [b, Ab,..., A 7 b ], RangP = 8 Σ = steuerbar&flach FLA: z = λ T x mit λ T = [,...,, κ ] P 1 z [ 1,, - l 1,, -l 2,, -.7 l 3 ] x oberes Drittel von 3. Pendel M. Zeitz (Uni Stuttgart) Flachheit Eine nützliche Methodik... Elgersburg / 27
13 Flachheits-basierte 2FHG-Folgeregelung mit Beobachter Ψ u u d Σ d x d u c u y Ψ x LQR z Σ d ˆx ˆΣ Trajektorien-Planung: Side-Stepping s() = s s(t) = s T Σ d : x d() = [ s,,..., ] T = x x d (T) = [ s T,,..., ] T = x T z d () = λ T x = z z d (T) = λ T x T = z T 17 ( t ) i z d (t) = z + (z T z ) p i C 8, t [, T] T i=9 Vorsteuerung u d = Ψ u (z d, ż d,..., (8) z d ) C LQR-Rückführung u c = k T (ˆx x d ) mit x d = Ψ x (z d, ż d,..., (7) z d ) Beobachter-Entwurf ˆΣ mit Eigenwert-Vorgabe M. Zeitz (Uni Stuttgart) Flachheit Eine nützliche Methodik... Elgersburg / 27
 wegen instabiler Nulldynamik Measurements (solid lines) Nominal")
14 Simulation u. Experiment: Side-Stepping 3-fach-Pendel Simulated Snap Shots Video z d [m] s d [m] t [s] t [s] Gegenläufige Wagenbewegung s(t) wegen instabiler Nulldynamik Measurements (solid lines) Nominal Trajectories (dashed lines) s, s d [m] ṡ, ṡ d [m/s] t [s] t [s] M. Zeitz (Uni Stuttgart) Flachheit Eine nützliche Methodik... Elgersburg / 27 z [m] ϕ; [ ] ϕ 1 ϕ 2 ϕ 3 6 8
15 Zusammenhang flacher und realer Ausgang für r <n Σ : Y (s) = P(s) Q(s) U(s) = b + b 1 s b m s m a + a 1 s a n s n U(s) (m >, teilerfremd) BÉZOUT-Identität für FLA: Z(s) = Y (s)/p(s) = U(s)/Q(s) Differenzielle Parametrierung des realen Ausgangs Y(s) = P(s) Z(s) (m) y = b z + b 1 ż b m z Dgl. der Ordnung n r für FLA z(t) b n r (n r) z b 1 ż + b z = mit m = n r Referenz y d (t) { y interne Dynamik Nulldynamik Voraussetzung für Umrechnung y d (t) z d (t) [HAGENMEYER/Z 3]: asymptotische Stabilität der internen Dynamik (Nulldynamik) Alternativ: Flacher Eingang v mit relat. Grad r = n und y! = z (FLA) M. Zeitz (Uni Stuttgart) Flachheit Eine nützliche Methodik... Elgersburg / 27
16 Flacher Eingang (FLE) [ WALDHERR/ Z 8] Σ: ẋ = Ax + γv FLE y = c T x! = z FLA mit r = n v Σ y! = z Konstruktion: Eingangsvektor γ mit relativem Grad r = n ẏ ÿ. (n) y c T c T A. } c T A n 1 {{ } Q γ =. κ }{{} e Q = Beob.-Matr. RangQ = n Σ = beobachtbar γ = Q 1 e letzte Q 1 - Spalte multipliziert mit κ Notwendig und hinreichend für FLE-Existenz : Σ = beobachtbar Notwendig: Realisierbarkeit von FLE γv (FLE fiktiv wie FLA) M. Zeitz (Uni Stuttgart) Flachheit Eine nützliche Methodik... Elgersburg / 27
17 Beispiel: Dreifach-Integrator (n=3) Konstruktion eines flachen Eingangs (FLE) für... Σ : ẋ = 1 1 x + γ v FLE, x() = x R 3 a) y = [1,, ]x γ = [,, 1] T v y =! z (r = 3) s s s x 3 x 2 x 1 b) y = [1, 1, 1]x γ = [, -1, 1] T v y =! z (r = 3) s s s x 3 x 2 x 1 Beobachtbarkeits-Matrix Q = ct c T A = , det Q = 1, Q 1 = 1-1 c T A 2 1 }{{} 1 γ (κ = 1) M. Zeitz (Uni Stuttgart) Flachheit Eine nützliche Methodik... Elgersburg / 27
18 Beispiel: Realisierbarkeits-Bedingung für FLE M φ m L u y z 1 Σ: ẋ = - gm M 1 1 x + M u g(m+m) LM }{{ } - 1 LM A x = [ y, ẏ, ϕ, ϕ] T R 4, ϕ 1, y = c T x (r =2) FLA: z = y+l ϕ Ψ y : z g L z = y (instab. Dgl.) FLE-Konstruktion: ẋ = Ax + γ v, y = c T x =! z (r =4) c T 1 Beob.- Q = c T A Matr.: c T A 2 = 1 - gm c T A 3 M γ = Q 1 = - gm M κ Moment γ v auf Pendel ohne Rückwirkung auf Wagen realisierbar! M. Zeitz (Uni Stuttgart) Flachheit Eine nützliche Methodik... Elgersburg / 27
19 Periodische 2FHG-Folgeregelung Scheibenwischer-Antrieb M. Zeitz (Uni Stuttgart) Flachheit Eine nützliche Methodik... Elgersburg / 27
20 TAYLOR-Linearisierung um Referenztrajektorien Σ: ẋ = f (x,u), x() = x R n, y = h(x), u, y R Referenztrajektorien Σ d : {u d (t),x d (t), y d (t), t t } TAYLOR-Linearisierung für x x d, u u d, y y d 1 A(t) = f x (x d, u d ), b(t) = f u (x d, u d ), c T (t) = h x (x d), t t Zeitvariante lineare SISO-Systeme mit A(t),b(t),c T (t) C n Σ : ẋ = A(t)x + b(t)u, x(t ) = x R n, y = c T (t)x, u, y R Relativer Grad < r n ẏ = (ċ T + c T A) }{{} M A c T x + c T b }{{} = u,... Zeitvarianter Differenzial-Operator M A (r) y = MAc r T x + M r 1 A ct b u }{{} κ(t) M A c T = ċ T + c T A, M Ac T = c T, M k A c T = M A (M k 1 A c T ) M. Zeitz (Uni Stuttgart) Flachheit Eine nützliche Methodik... Elgersburg / 27
21 Flacher Eingang (FLE) für linear-zeitvariante SISO-Systeme Σ: ẋ = A(t)x + γ(t)v FLE y = c T (t)x! = z FLA mit r = n v Σ y! = z Konstruktion: Eingangsvektor γ(t) mit relativem Grad r = n ẏ ÿ.. (n) y MA ct M A c T.. M n 1 A c T } {{ } Q(t) γ(t) =. κ(t) } {{ } e(t) M A c T = ċ T +c T A Q(t) = Beob.-Matr. RangQ(t) = n Σ = beobachtbar γ(t) = Q 1 (t)e(t) letzte Q 1 (t)-spalte multipl. mit κ(t) Notwendig und hinreichend für FLE-Existenz : Σ = beobachtbar Notwendig : Realisierbarkeit von FLE γ(t)v (FLE fiktiv wie FLA) M. Zeitz (Uni Stuttgart) Flachheit Eine nützliche Methodik... Elgersburg / 27
22 Beispiel: Zeitvariantes SISO-System 2. Ordnung ( 1 Σ : ẋ = u, x(t t) ) = x R 2, y = [ t, 1 ] x (A(t) = ) }{{}}{{} c b(t) T (t) Relat. Grad : ẏ = x 1 + 2t u r = 1 (t ) ( c T ) ( ) (t) t 1 Beob.-Matr.: Q(t) = ċ T =, det Q(t) = 1 (t) 1 ( FLE : ẋ = γ(t)v, y =! z mit γ(t) = Q 1 (t) ( ż FLA-Koord.: x = = z) Regler-NF Σ : z = v, y =z (r = 2) ) ( 1 = -t) κ=1 ( ) ( )( t 1 1 ż x x =, v = z 1 1 -t z) }{{}}{{} Q(t) Q 1 (t) FLA: ẋ = A(t)x + b(t)u, z = λ T (t)x (r = n) λ T (t) =? M. Zeitz (Uni Stuttgart) Flachheit Eine nützliche Methodik... Elgersburg / 27
23 Flacher Ausgang (FLA) für linear-zeitvariante SISO -Systeme Σ : ẋ = A(t)x + b(t)u, x(t ) = x R n y = c T (t)x, u, y R, rel.grad r n Konstruktion: FLA z = λ T (t)x mit relativem Grad r =n ż z. (n) z M A λt b M A λ T b. M n 1 A λt b λ T N A b λ T N A b. λ T N n 1 A u =. b κ(t) λ T (t) [b, N A b,..., N n 1 A }{{ b } ] = [,...,, κ(t) ] }{{} Steuerb.-Matr. P(t) e T (t) Σ x y r n z r = n M A λ T = λ T +λ T A N A b = ḃ +Ab N A b = b RangP(t) = n Σ=steuerbar λ T (t)= e T (t)p 1 (t) letzte P 1 (t)-zeile multipl. mit κ(t) M. Zeitz (Uni Stuttgart) Flachheit Eine nützliche Methodik... Elgersburg / 27
24 Linear-zeitvariante SISO-Regler-Normalform Σ: ẋ = A(t)x+b(t)u, x(t ) = x R n, RangP(t) = n FLA: z = λ T (t)x, λ T (t)= [,...,, κ(t) ] P 1 (t) FLA-Koordinaten Regler-NF Σ (M A λ T = λ T +λ T A) z λ T (t) x ż =... = M A λ T (t)... x = T(t)x λ T (t) Σ : (n 1) z M n 1 A (n) z = [ a (t),..., a n 1 (t)] x + κ(t)u, }{{} a T (t) = MA nλt (t)t 1 (t) Transformation Σ Σ Eingangs-Transformation und Kompensation der Zeitvarianz x () =T(t )x R n u = 1 κ(t) [ w + at (t)x ] (n) z = w neuer Eingang w M. Zeitz (Uni Stuttgart) Flachheit Eine nützliche Methodik... Elgersburg / 27
25 Linear-zeitvariante 2FHG-Folgeregelung Σ: ẋ = A(t)x+b(t)u, x(t ) = x R n, RangP(t) = n FLA: z = λ T (t)x, λ T (t)= [,...,, κ(t) ] P 1 (t) Σ : (n) z = a T (t)x + κ(t)u, x = [ z, ż,..., (n 1) z ] T = T(t)x Folgeregelung z(t) z d (t) C n (M A λ T = λ T +λ T A) 2FHG: u = 1 κ(t) [ (n) z d + a T (t)x d ] } {{ } Vorsteuerung u d + k T (t) [x d x ] }{{} Rückführung u c mit x d =T 1 (t)x d Zeitvariante ACKERMANN-Formel k T (t) = 1 κ(t) [ p MA + p 1 M A p n 1 M n 1 A + MA n ] λt (t) HURWITZ-Dgl.: (n) e +p n 1 (n 1) e + + p 1 ė + p e = für e = z z d M. Zeitz (Uni Stuttgart) Flachheit Eine nützliche Methodik... Elgersburg / 27
26 F A Z I T Flachheits-Methodik für lineare Systeme : FLA/FLE einfacher bestimmbar als für nichtlineare Systeme FLA definiert Regler-Normalform Σ Σ Σ Σ wichtig für Trajektorien-Planung/Vorsteuerungs-Entwurf nötig für linearen zeitinvarianten Regler-Entwurf wichtig für linearen zeitinvarianten Regler-Entwurf Flachheit nützlich für Entwurf von 2FHG-Folgeregelung Lineare Flachheits-Methodik leicht vermittelbar in RT-Ausbildung V I E L E N D A N K! M. Zeitz (Uni Stuttgart) Flachheit Eine nützliche Methodik... Elgersburg / 27
27 L I T E R A T U R 1. M.Fliess, J.Lévine, P.Martin, P.Rouchon: Flatness and defect of non-linear systems: introductory theory and examples. Internat.Journal of Control 61(1995), R.Rothfuß, J.Rudolph, M.Zeitz: Flachheit: Ein neuer Zugang zur Steuerung und Regelung nichtlinearer Systeme. Automatisierungstechnik 45(1997), H.Sira-Ramírez, S.K.Agrawal: Differentially Flat Systems. Marcel Decker, Inc., New York-Basel, V.Hagenmeyer, M.Zeitz: Flachheitsbasierter Entwurf von linearen und nichtlinearen Vorsteuerungen. Automatisierungstechnik 52(24), S.Waldherr, M.Zeitz: Conditions for the existence of a flat input. International Journal of Control 81 (28), M.Zeitz: Differenzielle Flachheit: Eine nützliche Methodik auch für lineare SISO-Systeme. Automatisierungstechnik 58(21), M.Zeitz: Flachheitsbasierter Entwurf linearer zeitvarianter SISO-Systeme. Automatisierungstechnik 58(21), M.Zeitz: Flache Systeme. Institut für Systemdynamik, Universität Stuttgart. M. Zeitz (Uni Stuttgart) Flachheit Eine nützliche Methodik... Elgersburg / 27
Flachheit Eine nützliche Methodik auch für lineare Systeme
 Flachheit Eine nützliche Methodik auch für lineare Systeme Michael Zeitz Institut für Systemdynamik Universität Stuttgart Flachheits-Methodik [FLIESS et al. 92ff] Lineare SISO und MIMO Systeme M. Zeitz
Flachheit Eine nützliche Methodik auch für lineare Systeme Michael Zeitz Institut für Systemdynamik Universität Stuttgart Flachheits-Methodik [FLIESS et al. 92ff] Lineare SISO und MIMO Systeme M. Zeitz
Zusammenfassung der 7. Vorlesung
 Zusammenfassung der 7. Vorlesung Steuer- und Erreichbarkeit zeitdiskreter Systeme Bei zeitdiskreten Systemen sind Steuer-und Erreichbarkeit keine äquivalente Eigenschaften. Die Erfüllung des Kalmankriteriums
Zusammenfassung der 7. Vorlesung Steuer- und Erreichbarkeit zeitdiskreter Systeme Bei zeitdiskreten Systemen sind Steuer-und Erreichbarkeit keine äquivalente Eigenschaften. Die Erfüllung des Kalmankriteriums
Klausur: Regelungs- und Systemtechnik 2
 4 6 Fachgebiet Regelungstechnik Leiter: Prof. Dr.-Ing. Johann Reger Klausur: Regelungs- und Systemtechnik 2 Humboldt-Hörsaal Dienstag, den 07. 02. 2012 Beginn: 10.30 Uhr Bearbeitungszeit: 120 Minuten Modalitäten
4 6 Fachgebiet Regelungstechnik Leiter: Prof. Dr.-Ing. Johann Reger Klausur: Regelungs- und Systemtechnik 2 Humboldt-Hörsaal Dienstag, den 07. 02. 2012 Beginn: 10.30 Uhr Bearbeitungszeit: 120 Minuten Modalitäten
Institut für Elektrotechnik und Informationstechnik. Aufgabensammlung zur. Systemtheorie
 Institut für Elektrotechnik und Informationstechnik Aufgabensammlung zur Systemtheorie Prof. Dr. techn. F. Gausch Dipl.-Ing. C. Balewski Dipl.-Ing. R. Besrat 05.04.2013 Übungsaufgaben zur Systemtheorie
Institut für Elektrotechnik und Informationstechnik Aufgabensammlung zur Systemtheorie Prof. Dr. techn. F. Gausch Dipl.-Ing. C. Balewski Dipl.-Ing. R. Besrat 05.04.2013 Übungsaufgaben zur Systemtheorie
Funnel Control für mechatronische Systeme mit Relativgrad 2
 Funnel Control für mechatronische Systeme mit Relativgrad 2 Christoph Hackl Technische Universität München Lehrstuhl für Elektrische Antriebssysteme und Leistungselektronik Elgersburg Workshop, 1.3.21
Funnel Control für mechatronische Systeme mit Relativgrad 2 Christoph Hackl Technische Universität München Lehrstuhl für Elektrische Antriebssysteme und Leistungselektronik Elgersburg Workshop, 1.3.21
2. Übung: Lineare dynamische Systeme
 2. Übung: Lineare dynamische Systeme Aufgabe 2.. Gegeben sind die beiden autonomen Systeme und x (2.) {{ A 2 2 x. (2.2) {{ A 2 Berechnen Sie die regulären Zustandstransformationen x = V z und x = V 2 z,
2. Übung: Lineare dynamische Systeme Aufgabe 2.. Gegeben sind die beiden autonomen Systeme und x (2.) {{ A 2 2 x. (2.2) {{ A 2 Berechnen Sie die regulären Zustandstransformationen x = V z und x = V 2 z,
Übungsskript Regelungstechnik 2
 Seite 1 von 11 Universität Ulm, Institut für Mess-, Regel- und Mikrotechnik Prof. Dr.-Ing. Klaus Dietmayer / Seite 2 von 11 Aufgabe 1 : In dieser Aufgabe sollen zeitdiskrete Systeme untersucht werden.
Seite 1 von 11 Universität Ulm, Institut für Mess-, Regel- und Mikrotechnik Prof. Dr.-Ing. Klaus Dietmayer / Seite 2 von 11 Aufgabe 1 : In dieser Aufgabe sollen zeitdiskrete Systeme untersucht werden.
Technische Universität Wien Institut für Automatisierungs- und Regelungstechnik. SCHRIFTLICHE PRÜFUNG zur VU Automatisierungstechnik am
 Technische Universität Wien Institut für Automatisierungs- und Regelungstechnik SCHRIFTLICHE PRÜFUNG zur VU Automatisierungstechnik am 12.12.2008 Name: Vorname(n): Matrikelnummer: Note: Aufgabe 1 2 3 4
Technische Universität Wien Institut für Automatisierungs- und Regelungstechnik SCHRIFTLICHE PRÜFUNG zur VU Automatisierungstechnik am 12.12.2008 Name: Vorname(n): Matrikelnummer: Note: Aufgabe 1 2 3 4
Stabilisierung linearer Systeme mit Ausgangsrückführung via Euler-Methode
 Stabilisierung linearer Systeme mit Ausgangsrückführung via Euler-Methode Markus Müller gemeinsame Arbeit mit M. French (Southampton) und A. Ilchmann (Ilmenau) Elgersburg-Workshop 2007 Elgersburg, 21.
Stabilisierung linearer Systeme mit Ausgangsrückführung via Euler-Methode Markus Müller gemeinsame Arbeit mit M. French (Southampton) und A. Ilchmann (Ilmenau) Elgersburg-Workshop 2007 Elgersburg, 21.
Name: Vorname(n): Kenn und Matrikelnummer: Aufgabe erreichbare Punkte erreichte Punkte
: Kenn und Matrikelnummer: Aufgabe erreichbare Punkte erreichte Punkte") Johannes Kepler Universität Linz, Institut für Regelungstechnik und elektrische Antriebe Schriftliche Prüfung aus Automatisierungstechnik, Vorlesung am 06. Mai 2005 Name: Vorname(n): Kenn und Matrikelnummer:
Johannes Kepler Universität Linz, Institut für Regelungstechnik und elektrische Antriebe Schriftliche Prüfung aus Automatisierungstechnik, Vorlesung am 06. Mai 2005 Name: Vorname(n): Kenn und Matrikelnummer:
Floquet-Theorie IV. 1 Hills Gleichung
 Vortrag zum Seminar Gewöhnliche Differentialgleichungen, 08.11.2011 Tobias Roidl Dieser Vortrag befasst sich mit der Hills Gleichung und gibt eine Einführung in die Periodischen Orbits von linearen Systemen.
Vortrag zum Seminar Gewöhnliche Differentialgleichungen, 08.11.2011 Tobias Roidl Dieser Vortrag befasst sich mit der Hills Gleichung und gibt eine Einführung in die Periodischen Orbits von linearen Systemen.
Entwurf von IMC-Reglern für nichtlineare Systeme am Beispiel des Hochsetzstellers
 am Beispiel des Hochsetzstellers Institut für Regelungs- und Steuerungstheorie Fakultät Elektrotechnik und Informationstechnik Technische Universität Dresden Kolloquium zur nichtlinearen Regelung leistungselektronischer
am Beispiel des Hochsetzstellers Institut für Regelungs- und Steuerungstheorie Fakultät Elektrotechnik und Informationstechnik Technische Universität Dresden Kolloquium zur nichtlinearen Regelung leistungselektronischer
Regelungstechnik I (WS 12/13) Klausur ( )
 Klausur ( )") Regelungstechnik I (WS 12/13) Klausur (05.03.2013) Prof. Dr. Ing. habil. Thomas Meurer Lehrstuhl für Regelungstechnik Name: Matrikelnummer: Bitte beachten Sie: a) Diese Klausur enthält 4 Aufgaben auf den
Regelungstechnik I (WS 12/13) Klausur (05.03.2013) Prof. Dr. Ing. habil. Thomas Meurer Lehrstuhl für Regelungstechnik Name: Matrikelnummer: Bitte beachten Sie: a) Diese Klausur enthält 4 Aufgaben auf den
Schriftliche Prüfung aus Control Systems 1 am
 TU Graz, Institut für Regelungs- und Automatisierungstechnik 1 Schriftliche Prüfung aus Control Systems 1 am 24.11.2014 Name / Vorname(n): Kennzahl / Matrikel-Nummer: Prüfungsmodus: O VO+UE (TM) O VO (BM)
TU Graz, Institut für Regelungs- und Automatisierungstechnik 1 Schriftliche Prüfung aus Control Systems 1 am 24.11.2014 Name / Vorname(n): Kennzahl / Matrikel-Nummer: Prüfungsmodus: O VO+UE (TM) O VO (BM)
Technische Universität Wien Institut für Automatisierungs- und Regelungstechnik. SCHRIFTLICHE PRÜFUNG zur VU Automatisierung am
 Technische Universität Wien Institut für Automatisierungs- und Regelungstechnik SCHRIFTLICHE PRÜFUNG zur VU Automatisierung am 8.7.211 Arbeitszeit: 12 min Name: Vorname(n): Matrikelnummer: Note: Aufgabe
Technische Universität Wien Institut für Automatisierungs- und Regelungstechnik SCHRIFTLICHE PRÜFUNG zur VU Automatisierung am 8.7.211 Arbeitszeit: 12 min Name: Vorname(n): Matrikelnummer: Note: Aufgabe
Inhaltsverzeichnis. 2 Grenzzyklen und Stabilitätskriterien VerfahrenderharmonischenBalance IdeedesVerfahrens...
 Inhaltsverzeichnis Blau nummerierte Abschnitte enthalten Grundlagen, die einen Basiskurs über nichtlineare Systeme und Regelungen bilden. Schwarz nummerierte enthalten weitergehende Informationen, die
Inhaltsverzeichnis Blau nummerierte Abschnitte enthalten Grundlagen, die einen Basiskurs über nichtlineare Systeme und Regelungen bilden. Schwarz nummerierte enthalten weitergehende Informationen, die
tun, sondern nur mit der Reaktion auf verschiedene Anfangswerte.
 2.3 Stabilität Eine wichtige Rolle spielt das Stabilitätsverhalten dynamischer Systeme. Wie üblich sei Φ die Fundamentalmatrix des linearen Systems ẋ = A(t)x + u. Im weiteren sei t fixiert, später wird
2.3 Stabilität Eine wichtige Rolle spielt das Stabilitätsverhalten dynamischer Systeme. Wie üblich sei Φ die Fundamentalmatrix des linearen Systems ẋ = A(t)x + u. Im weiteren sei t fixiert, später wird
REGELUNGSSYSTEME 2. Vorlesung SS Univ.-Prof. Dr. techn. Andreas KUGI
 REGELUNGSSYSTEME 2 Vorlesung SS 2018 Univ.-Prof. Dr. techn. Andreas KUGI Regelungssysteme 2 Vorlesung SS 2018 Univ.-Prof. Dr. techn. Andreas KUGI TU Wien Institut für Automatisierungs- und Regelungstechnik
REGELUNGSSYSTEME 2 Vorlesung SS 2018 Univ.-Prof. Dr. techn. Andreas KUGI Regelungssysteme 2 Vorlesung SS 2018 Univ.-Prof. Dr. techn. Andreas KUGI TU Wien Institut für Automatisierungs- und Regelungstechnik
TECHNISCHE UNIVERSITÄT MÜNCHEN
 Prof Dr M Keyl M Kech TECHNISCHE UNIVERSITÄT MÜNCHEN Zentrum Mathematik Mathematik für Physiker 3 (Analysis 2) MA923 http://wwwm5matumde/allgemeines/ma923_26s Sommersem 26 Probeklausur (4726) Krümmung
Prof Dr M Keyl M Kech TECHNISCHE UNIVERSITÄT MÜNCHEN Zentrum Mathematik Mathematik für Physiker 3 (Analysis 2) MA923 http://wwwm5matumde/allgemeines/ma923_26s Sommersem 26 Probeklausur (4726) Krümmung
SYNTHESE LINEARER REGELUNGEN
 Synthese Linearer Regelungen - Formelsammlung von 8 SYNTHESE LINEARER REGELUNGEN FORMELSAMMLUNG UND MERKZETTEL INHALT 2 Grundlagen... 2 2. Mathematische Grundlagen... 2 2.2 Bewegungsgleichungen... 2 2.3
Synthese Linearer Regelungen - Formelsammlung von 8 SYNTHESE LINEARER REGELUNGEN FORMELSAMMLUNG UND MERKZETTEL INHALT 2 Grundlagen... 2 2. Mathematische Grundlagen... 2 2.2 Bewegungsgleichungen... 2 2.3
Name: Vorname(n): Matrikelnummer: Aufgabe erreichbare Punkte erreichte Punkte Punkte aus Übungsmitarbeit Gesamtpunktanzahl
: Matrikelnummer: Aufgabe erreichbare Punkte erreichte Punkte Punkte aus Übungsmitarbeit Gesamtpunktanzahl") Universität des Saarlandes, Lehrstuhl für Systemtheorie und Regelungstechnik SCHRIFTLICHE PRÜFUNG aus SYSTEMTHEORIE UND REGELUNGSTECHNIK I am 28.7.26 Name: Vorname(n): Matrikelnummer: Note: Aufgabe 2 3
Universität des Saarlandes, Lehrstuhl für Systemtheorie und Regelungstechnik SCHRIFTLICHE PRÜFUNG aus SYSTEMTHEORIE UND REGELUNGSTECHNIK I am 28.7.26 Name: Vorname(n): Matrikelnummer: Note: Aufgabe 2 3
BSc PRÜFUNGSBLOCK 2 / D-MAVT VORDIPLOMPRÜFUNG / D-MAVT. Musterlösung
 Institut für Mess- und Regeltechnik BSc PRÜFUNGSBLOCK / D-MAVT.. 005. VORDIPLOMPRÜFUNG / D-MAVT REGELUNGSTECHNIK I Musterlösung Dauer der Prüfung: Anzahl der Aufgaben: Bewertung: Zur Beachtung: Erlaubte
Institut für Mess- und Regeltechnik BSc PRÜFUNGSBLOCK / D-MAVT.. 005. VORDIPLOMPRÜFUNG / D-MAVT REGELUNGSTECHNIK I Musterlösung Dauer der Prüfung: Anzahl der Aufgaben: Bewertung: Zur Beachtung: Erlaubte
Stabilität von geschalteten DAEs
 Elgersburg Workshop 2011, 16.02.2011, 17:30-18:00 Einleitung Klassische DAEs Distributionelle Lösungen für geschaltetet DAEs Inhalt 1 Einleitung Systemklasse: Definition und Motivation Beispiele 2 Klassische
Elgersburg Workshop 2011, 16.02.2011, 17:30-18:00 Einleitung Klassische DAEs Distributionelle Lösungen für geschaltetet DAEs Inhalt 1 Einleitung Systemklasse: Definition und Motivation Beispiele 2 Klassische
Aufgabe 1 (Klassifizierung von Systemen)
") Prof. L. Guzzella Prof. R. D Andrea 151-0591-00 Regelungstechnik I (HS 07) Musterlösung Übung 3 Systemklassifizierung, Systeme 1. Ordnung im Zeitbereich, Stabilitätsanalyse moritz.oetiker@imrt.mavt.ethz.ch,
Prof. L. Guzzella Prof. R. D Andrea 151-0591-00 Regelungstechnik I (HS 07) Musterlösung Übung 3 Systemklassifizierung, Systeme 1. Ordnung im Zeitbereich, Stabilitätsanalyse moritz.oetiker@imrt.mavt.ethz.ch,
Lineare Differentialgleichungen
 Technische Universität München Thomas Reifenberger Vorlesung, Kapitel 4 Repetitorium Analysis I für Physiker Analysis I Lineare Differentialgleichungen 1 Das Matrixexponential Definition 1.1 Sei A C n
Technische Universität München Thomas Reifenberger Vorlesung, Kapitel 4 Repetitorium Analysis I für Physiker Analysis I Lineare Differentialgleichungen 1 Das Matrixexponential Definition 1.1 Sei A C n
0 1 = A = f. cos(x 1,R ) 2r3 R βx 2,R 2r 2 R βu R c 1. b = f. c T = h. d = h. = 0 0 Pkt. Lineariserung des Ersatzsystems: 1.5 Pkt.
 2r3 R βx 2,R 2r 2 R βu R c 1. b = f. c T = h. d = h. = 0 0 Pkt. Lineariserung des Ersatzsystems: 1.5 Pkt.") 1 Lösung Aufgabe 1). a) Es existieren zwei mögliche Zustandssätze x = [ ϕt) ϕt) ] T oder x = [ st) ṡt) ] T. Stellgröße u = v W t) und Ausgangsgröße y = st) b) Aus dem Drehimpulserhaltungssatz bzw. der
1 Lösung Aufgabe 1). a) Es existieren zwei mögliche Zustandssätze x = [ ϕt) ϕt) ] T oder x = [ st) ṡt) ] T. Stellgröße u = v W t) und Ausgangsgröße y = st) b) Aus dem Drehimpulserhaltungssatz bzw. der
Regelungstechnik II PVK - Lösungen. Nicolas Lanzetti
 Regelungstechnik II PVK - Lösungen Nicolas Lanzetti lnicolas@student.ethz.ch Nicolas Lanzetti Regelungstechnik II FS 6 Inhaltsverzeichnis Wiederholung Regelungstechnik I 3 SISO Reglersynthese 3 3 Realisierung
Regelungstechnik II PVK - Lösungen Nicolas Lanzetti lnicolas@student.ethz.ch Nicolas Lanzetti Regelungstechnik II FS 6 Inhaltsverzeichnis Wiederholung Regelungstechnik I 3 SISO Reglersynthese 3 3 Realisierung
Johannes Kepler Universität Linz Institut für Regelungstechnik und Prozessautomatisierung
 Johannes Kepler Universität Linz Institut für Regelungstechnik und Prozessautomatisierung Schriftliche Prüfung aus Automatisierungstechnik 1 Vorlesung, am 03. Juli 017 Name: Vorname(n): Matr.Nr.: SKZ:
Johannes Kepler Universität Linz Institut für Regelungstechnik und Prozessautomatisierung Schriftliche Prüfung aus Automatisierungstechnik 1 Vorlesung, am 03. Juli 017 Name: Vorname(n): Matr.Nr.: SKZ:
Zum Relativgrad zeitvarianter Systeme
 Elgersburg, 16. Februar 2006 Relative degree for linear time-invariant systems Definition n(s) d(s) = c(si n A) 1 b = cb s 1 + cab s 2 +... + ca r 2 b s r 1 + ca r 1 b s r +... : has relative degree r
Elgersburg, 16. Februar 2006 Relative degree for linear time-invariant systems Definition n(s) d(s) = c(si n A) 1 b = cb s 1 + cab s 2 +... + ca r 2 b s r 1 + ca r 1 b s r +... : has relative degree r
Prof. Dr.-Ing. habil. W. Schwarz Prof. Dr.-Ing. Dr.rer.nat. K. Reinschke Prof. A. Griewank, PhD Prof. Dr.-Ing. Dr.h.c. M. Zeitz
 Klaus Röbenack Von der Fakultät Elektrotechnik und Informationstechnik der Technischen Universität Dresden zur Erlangung des akademischen Grades Doktoringenieur habilitatus (Dr.-Ing. habil.) angenommene
Klaus Röbenack Von der Fakultät Elektrotechnik und Informationstechnik der Technischen Universität Dresden zur Erlangung des akademischen Grades Doktoringenieur habilitatus (Dr.-Ing. habil.) angenommene
Probeklausur: Nichtlineare Regelungssysteme 1 Sommer 2016
 4 6 Fachgebiet Regelungstechnik Leiter: Prof. Dr.-Ing. Johann Reger Probeklausur: Nichtlineare Regelungssysteme 1 Sommer 2016 Hörsaal 2 Montag, den 08. 08. 2016 Beginn: 10.00 Uhr Bearbeitungszeit: 120
4 6 Fachgebiet Regelungstechnik Leiter: Prof. Dr.-Ing. Johann Reger Probeklausur: Nichtlineare Regelungssysteme 1 Sommer 2016 Hörsaal 2 Montag, den 08. 08. 2016 Beginn: 10.00 Uhr Bearbeitungszeit: 120
Technische Universität Wien Institut für Automatisierungs- und Regelungstechnik. SCHRIFTLICHE PRÜFUNG zur VU Automatisierungstechnik am
 Technische Universität Wien Institut für Automatisierungs- und Regelungstechnik SCHRIFTLICHE PRÜFUNG zur VU Automatisierungstechnik am 09.10.009 Name: Vorname(n): Matrikelnummer: Note: Aufgabe 1 3 4 erreichbare
Technische Universität Wien Institut für Automatisierungs- und Regelungstechnik SCHRIFTLICHE PRÜFUNG zur VU Automatisierungstechnik am 09.10.009 Name: Vorname(n): Matrikelnummer: Note: Aufgabe 1 3 4 erreichbare
D-MAVT/D-MATL Analysis II FS 2017 Dr. Andreas Steiger. Lösung - Serie 26. ẋ 1 = x 1 + 2x ẋ 2 = 2x 1 + x 2
 D-MAVT/D-MATL Analysis II FS 07 Dr. Andreas Steiger Lösung - Serie 6. Es ist das folgende autonome System ẋ = x + x + 3 ẋ = x + x von linearen Differenzialgleichungen. Ordung gegeben. Welche der folgenden
D-MAVT/D-MATL Analysis II FS 07 Dr. Andreas Steiger Lösung - Serie 6. Es ist das folgende autonome System ẋ = x + x + 3 ẋ = x + x von linearen Differenzialgleichungen. Ordung gegeben. Welche der folgenden
Technische Universität Wien Institut für Automatisierungs- und Regelungstechnik. SCHRIFTLICHE PRÜFUNG zur VU Automatisierung am
 Technische Universität Wien Institut für Automatisierungs- und Regelungstechnik SCHRIFTLICHE PRÜFUNG zur VU Automatisierung am 3.11.218 Arbeitszeit: 15 min Name: Vorname(n): Matrikelnummer: Note: Aufgabe
Technische Universität Wien Institut für Automatisierungs- und Regelungstechnik SCHRIFTLICHE PRÜFUNG zur VU Automatisierung am 3.11.218 Arbeitszeit: 15 min Name: Vorname(n): Matrikelnummer: Note: Aufgabe
Technische Universität Wien Institut für Automatisierungs- und Regelungstechnik. SCHRIFTLICHE PRÜFUNG zur VU Automatisierungstechnik am
 Technische Universität Wien Institut für Automatisierungs- und Regelungstechnik SCHRIFTLICHE PRÜFUNG zur VU Automatisierungstechnik am 10.12.2010 Arbeitszeit: 120 min Name: Vorname(n): Matrikelnummer:
Technische Universität Wien Institut für Automatisierungs- und Regelungstechnik SCHRIFTLICHE PRÜFUNG zur VU Automatisierungstechnik am 10.12.2010 Arbeitszeit: 120 min Name: Vorname(n): Matrikelnummer:
Technische Universität Wien Institut für Automatisierungs- und Regelungstechnik. SCHRIFTLICHE PRÜFUNG zur VU Automatisierungstechnik am
 Technische Universität Wien Institut für Automatisierungs- und Regelungstechnik SCHRIFTLICHE PRÜFUNG zur VU Automatisierungstechnik am..9 Name: Vorname(n): Matrikelnummer: Note: Aufgabe 3 4 erreichbare
Technische Universität Wien Institut für Automatisierungs- und Regelungstechnik SCHRIFTLICHE PRÜFUNG zur VU Automatisierungstechnik am..9 Name: Vorname(n): Matrikelnummer: Note: Aufgabe 3 4 erreichbare
SSRP Steirisches Seminar über Regelungstechnik und Prozessautomatisierung. S. Moschik, N. Dourdoumas (Hrsg.)
") SSRP 2011 17. Steirisches Seminar über Regelungstechnik und Prozessautomatisierung S. Moschik, N. Dourdoumas (Hrsg.) 5. - 8. 9. 2011 Schloss Retzhof, Leibnitz, Österreich ISBN: 978-3-901439-09-4 Institut
SSRP 2011 17. Steirisches Seminar über Regelungstechnik und Prozessautomatisierung S. Moschik, N. Dourdoumas (Hrsg.) 5. - 8. 9. 2011 Schloss Retzhof, Leibnitz, Österreich ISBN: 978-3-901439-09-4 Institut
Technische Universität Wien Institut für Automatisierungs- und Regelungstechnik. SCHRIFTLICHE PRÜFUNG zur VU Automatisierung am
 Technische Universität Wien Institut für Automatisierungs- und Regelungstechnik SCHRIFTLICHE PRÜFUNG zur VU Automatisierung am 3.7.8 Arbeitszeit: 5 min Name: Vorname(n): Matrikelnummer: Note: Aufgabe 3
Technische Universität Wien Institut für Automatisierungs- und Regelungstechnik SCHRIFTLICHE PRÜFUNG zur VU Automatisierung am 3.7.8 Arbeitszeit: 5 min Name: Vorname(n): Matrikelnummer: Note: Aufgabe 3
Stabilitätsfragen bei autonomen Systemen
 1 Stabilitätsfragen bei autonomen Systemen M. Schuster 09.08.2006 Inhaltsverzeichnis 1 Allgemeines über autonome Systeme 1 1.1 Oft übliche Bezeichnungen mit Übersetzung.......................... 1 2 Stabilität
1 Stabilitätsfragen bei autonomen Systemen M. Schuster 09.08.2006 Inhaltsverzeichnis 1 Allgemeines über autonome Systeme 1 1.1 Oft übliche Bezeichnungen mit Übersetzung.......................... 1 2 Stabilität
Birgit Steffenhagen. Formelsammlung. Regelungstechnik. Mit 300 Bildern. Fachbuchverlag Leipzig im Carl Hanser Verlag
 Birgit Steffenhagen Formelsammlung Regelungstechnik Mit 300 Bildern Fachbuchverlag Leipzig im Carl Hanser Verlag Inhaltsverzeichnis 1 Grundbegriffe 11 1.1 Systeme und Signale 11 1.2 Steuerung und Regelung
Birgit Steffenhagen Formelsammlung Regelungstechnik Mit 300 Bildern Fachbuchverlag Leipzig im Carl Hanser Verlag Inhaltsverzeichnis 1 Grundbegriffe 11 1.1 Systeme und Signale 11 1.2 Steuerung und Regelung
Zusammenfassung der 8. Vorlesung
 Zusammenfassung der 8. Vorlesung Beschreibung und Analyse dynamischer Systeme im Zustandsraum Steuerbarkeit eines dynamischen Systems Unterscheidung: Zustandssteuerbarkeit, Zustandserreichbarkeit Unterscheidung:
Zusammenfassung der 8. Vorlesung Beschreibung und Analyse dynamischer Systeme im Zustandsraum Steuerbarkeit eines dynamischen Systems Unterscheidung: Zustandssteuerbarkeit, Zustandserreichbarkeit Unterscheidung:
Hörsaalübung 6 Differentialgleichungen I für Studierende der Ingenieurwissenschaften
 Fachbereich Mathematik der Universität Hamburg WiSe 28/29 Dr. Hanna Peywand Kiani Hörsaalübung 6 Differentialgleichungen I für Studierende der Ingenieurwissenschaften Autonome Systeme, Stabilität Die ins
Fachbereich Mathematik der Universität Hamburg WiSe 28/29 Dr. Hanna Peywand Kiani Hörsaalübung 6 Differentialgleichungen I für Studierende der Ingenieurwissenschaften Autonome Systeme, Stabilität Die ins
Technische Universität Wien Institut für Automatisierungs- und Regelungstechnik. SCHRIFTLICHE PRÜFUNG zur VU Automatisierungstechnik am
 Technische Universität Wien Institut für Automatisierungs- und Regelungstechnik SCHRIFTLICHE PRÜFUNG zur VU Automatisierungstechnik am.. Arbeitszeit: min Name: Vorname(n): Matrikelnummer: Note: Aufgabe
Technische Universität Wien Institut für Automatisierungs- und Regelungstechnik SCHRIFTLICHE PRÜFUNG zur VU Automatisierungstechnik am.. Arbeitszeit: min Name: Vorname(n): Matrikelnummer: Note: Aufgabe
Blatt 1. Kinematik- Lösungsvorschlag
 Fakultät für Physik der LMU München Lehrstuhl für Kosmologie, Prof. Dr. V. Mukhanov Übungen zu Klassischer Mechanik (T1) im SoSe 011 Blatt 1. Kinematik- Lösungsvorschlag Aufgabe 1.1. Schraubenlinie Die
Fakultät für Physik der LMU München Lehrstuhl für Kosmologie, Prof. Dr. V. Mukhanov Übungen zu Klassischer Mechanik (T1) im SoSe 011 Blatt 1. Kinematik- Lösungsvorschlag Aufgabe 1.1. Schraubenlinie Die
Formelsammlung. für den Teilbereich Zustandsraumdarstellung der Vorlesung. Einführung in die Regelungstechnik
 Formelsammlung für den Teilbereich Zustandsraumdarstellung der Vorlesung Einführung in die Regelungstechnik Diese Formelsammlung ist ein Auszug aus der Formelsammlung zur Systemtheorie-Vorlesung von Matthias
Formelsammlung für den Teilbereich Zustandsraumdarstellung der Vorlesung Einführung in die Regelungstechnik Diese Formelsammlung ist ein Auszug aus der Formelsammlung zur Systemtheorie-Vorlesung von Matthias
Beiträge zur flachheitsbasierten Folgeregelung linearer und nichtlinearer Systeme endlicher und unendlicher Dimension
 Berichte aus dersteuerungs- und Regelungstechnik Joachim Rudolph Beiträge zur flachheitsbasierten Folgeregelung linearer und nichtlinearer Systeme endlicher und unendlicher Dimension Shaker Verlag Aachen
Berichte aus dersteuerungs- und Regelungstechnik Joachim Rudolph Beiträge zur flachheitsbasierten Folgeregelung linearer und nichtlinearer Systeme endlicher und unendlicher Dimension Shaker Verlag Aachen
Klausur: Regelungs- und Systemtechnik 2
 4 6 Fachgebiet Regelungstechnik Leiter: Prof. Dr.-Ing. Johann Reger Klausur: Regelungs- und Systemtechnik 2 Kirchhoff-Hörsaal 1 Donnerstag, den 19. 09. 2013 Beginn: 09.30 Uhr Bearbeitungszeit: 120 Minuten
4 6 Fachgebiet Regelungstechnik Leiter: Prof. Dr.-Ing. Johann Reger Klausur: Regelungs- und Systemtechnik 2 Kirchhoff-Hörsaal 1 Donnerstag, den 19. 09. 2013 Beginn: 09.30 Uhr Bearbeitungszeit: 120 Minuten
Schriftliche Prüfung aus Systemtechnik am
 TU Graz, Institut für Regelungs- und Automatisierungstechni Schriftliche Prüfung aus Systemtechni am 29.0.206 Name / Vorname(n): Matriel-Nummer: Aufgabe A A2 A3 A4 A5 A6 A7 A8 Summe erreichbare Punte 2
TU Graz, Institut für Regelungs- und Automatisierungstechni Schriftliche Prüfung aus Systemtechni am 29.0.206 Name / Vorname(n): Matriel-Nummer: Aufgabe A A2 A3 A4 A5 A6 A7 A8 Summe erreichbare Punte 2
Technische Universität Wien Institut für Automatisierungs- und Regelungstechnik. SCHRIFTLICHE PRÜFUNG zur VU Automatisierung am
 Name: Vorname(n): Matrikelnummer: Bitte... Technische Universität Wien Institut für Automatisierungs- und Regelungstechnik SCHRIFTLICHE PRÜFUNG zur VU Automatisierung am 3.11.18 Arbeitszeit: 15 min Aufgabe
Name: Vorname(n): Matrikelnummer: Bitte... Technische Universität Wien Institut für Automatisierungs- und Regelungstechnik SCHRIFTLICHE PRÜFUNG zur VU Automatisierung am 3.11.18 Arbeitszeit: 15 min Aufgabe
Spezialisierte adaptive Algorithmen für die Modellprädiktive Regelung von PDEs
 Spezialisierte adaptive Algorithmen für die Modellprädiktive Regelung von PDEs Lehrstuhl für Angewandte Mathematik Mathematisches Institut Universität Bayreuth 28.02.2018 12. Elgersburg Workshop (26.02.
Spezialisierte adaptive Algorithmen für die Modellprädiktive Regelung von PDEs Lehrstuhl für Angewandte Mathematik Mathematisches Institut Universität Bayreuth 28.02.2018 12. Elgersburg Workshop (26.02.
Klausur zu Theoretische Physik 2 Klassische Mechanik
 Klausur zu Theoretische Physik Klassische Mechanik 30. September 016 Prof. Marc Wagner Goethe-Universität Frankfurt am Main Institut für Theoretische Physik 5 Aufgaben mit insgesamt 5 Punkten. Die Klausur
Klausur zu Theoretische Physik Klassische Mechanik 30. September 016 Prof. Marc Wagner Goethe-Universität Frankfurt am Main Institut für Theoretische Physik 5 Aufgaben mit insgesamt 5 Punkten. Die Klausur
Name: Vorname(n): Matrikelnummer: Aufgabe erreichbare Punkte erreichte Punkte Punkte aus Übungsmitarbeit Gesamtpunktanzahl
: Matrikelnummer: Aufgabe erreichbare Punkte erreichte Punkte Punkte aus Übungsmitarbeit Gesamtpunktanzahl") Universität des Saarlandes, Lehrstuhl für Systemtheorie und Regelungstechnik SCHRIFTLICHE PRÜFUNG aus SYSTEMTHEORIE UND REGELUNGSTECHNIK I am 3.0.007 Name: Vorname(n): Matrikelnummer: Note: Aufgabe 3 4
Universität des Saarlandes, Lehrstuhl für Systemtheorie und Regelungstechnik SCHRIFTLICHE PRÜFUNG aus SYSTEMTHEORIE UND REGELUNGSTECHNIK I am 3.0.007 Name: Vorname(n): Matrikelnummer: Note: Aufgabe 3 4
6. Übung: Zustandsregler- und beobachter
 6. Übung: Zustandsregler- und beobachter Aufgabe 6.. Gegeben ist ein lineares zeitinvariantes System der Form 3 6 ẋ = 4 x + u (6.a) 5 y = x. (6.b) Weisen Sie die vollständige Erreichbarkeit und Beobachtbarkeit
6. Übung: Zustandsregler- und beobachter Aufgabe 6.. Gegeben ist ein lineares zeitinvariantes System der Form 3 6 ẋ = 4 x + u (6.a) 5 y = x. (6.b) Weisen Sie die vollständige Erreichbarkeit und Beobachtbarkeit
Band I: Analyse und Synthese. lechnischs? Hochschule Oarmstadfl.FACHBEREICH INFORMATIK B 1 B L I O T H E K
 J. Ackermann Abtastregelung Zweite Auflage Band I: Analyse und Synthese Mit 71 Abbildungen lechnischs? Hochschule Oarmstadfl.FACHBEREICH INFORMATIK B 1 B L I O T H E K laventa r- h' r O o JJj Sadigebiefei
J. Ackermann Abtastregelung Zweite Auflage Band I: Analyse und Synthese Mit 71 Abbildungen lechnischs? Hochschule Oarmstadfl.FACHBEREICH INFORMATIK B 1 B L I O T H E K laventa r- h' r O o JJj Sadigebiefei
Schriftliche Prüfung aus Regelungstechnik 1 am
 TU Graz, Institut für Regelungs- und Automatisierungstechnik 1 Schriftliche Prüfung aus Regelungstechnik 1 am 24.01.2017 Name / Vorname(n): Matrikel-Nummer: Aufgabe A1 A2 A3 A4 A5 A6 A7 A8 Summe erreichbare
TU Graz, Institut für Regelungs- und Automatisierungstechnik 1 Schriftliche Prüfung aus Regelungstechnik 1 am 24.01.2017 Name / Vorname(n): Matrikel-Nummer: Aufgabe A1 A2 A3 A4 A5 A6 A7 A8 Summe erreichbare
Modellierung eines dynamischen Motorprüfstands. Modellbildung Identifikation Simulink-Modell Optimale Regelung
 Modellierung eines dynamischen Motorprüfstands Modellbildung Identifikation Simulink-Modell Optimale Regelung Josef Blumenschein Patrick Schrangl Aufgaben Modellbildung und Identifikation " Verbrennungsmotor
Modellierung eines dynamischen Motorprüfstands Modellbildung Identifikation Simulink-Modell Optimale Regelung Josef Blumenschein Patrick Schrangl Aufgaben Modellbildung und Identifikation " Verbrennungsmotor
Technische Universität Wien Institut für Automatisierungs- und Regelungstechnik. SCHRIFTLICHE PRÜFUNG zur VU Automatisierung am
 Technische Universität Wien Institut für Automatisierungs- und Regelungstechnik SCHRIFTLICHE PRÜFUNG zur VU Automatisierung am 8.5.5 Arbeitszeit: min Name: Vorname(n): Matrikelnummer: Note: Aufgabe 3 4
Technische Universität Wien Institut für Automatisierungs- und Regelungstechnik SCHRIFTLICHE PRÜFUNG zur VU Automatisierung am 8.5.5 Arbeitszeit: min Name: Vorname(n): Matrikelnummer: Note: Aufgabe 3 4
b) Ist das System zeitvariant oder zeitinvariant? (Begründung!) c) Bestimmen Sie mit Hilfe der LAPLACE-Transformation die Übertragungsfunktion
 Ist das System zeitvariant oder zeitinvariant? (Begründung!) c) Bestimmen Sie mit Hilfe der LAPLACE-Transformation die Übertragungsfunktion") Aufgabe 1: Systemanalyse Ein dynamisches System mit der Eingangsgröße u(t) und der Ausgangsgröße y(t) werde durch die folgenden gekoppelten Gleichungen beschrieben, wobei y 1 (t) eine Zwischengröße ist:
Aufgabe 1: Systemanalyse Ein dynamisches System mit der Eingangsgröße u(t) und der Ausgangsgröße y(t) werde durch die folgenden gekoppelten Gleichungen beschrieben, wobei y 1 (t) eine Zwischengröße ist:
12 Lineare Differentialgleichungen mit periodischen Koeffizienten
 56 Gewöhnliche Differentialgleichungen / Sommersemester 28 12 Lineare Differentialgleichungen mit eriodischen Koeffizienten 12.1 Homogene lineare Systeme mit eriodischen Koeffizienten haben für > die Form
56 Gewöhnliche Differentialgleichungen / Sommersemester 28 12 Lineare Differentialgleichungen mit eriodischen Koeffizienten 12.1 Homogene lineare Systeme mit eriodischen Koeffizienten haben für > die Form
Floquet Theorie II. 1 Einführung
 Vortrag zum Seminar Gewöhnliche Differentialgleichungen, 18.10.2011 Sebastian Monschang 1 Einführung Auf den Ergebnissen des ersten Vortrags basierend werden wir in diesem Vortrag gewöhnliche lineare Differentialgleichungssysteme
Vortrag zum Seminar Gewöhnliche Differentialgleichungen, 18.10.2011 Sebastian Monschang 1 Einführung Auf den Ergebnissen des ersten Vortrags basierend werden wir in diesem Vortrag gewöhnliche lineare Differentialgleichungssysteme

Tracking Controller Design for Nonlinear Dynamics using Differential Parameterizations
 Tracking Controller Design for Nonlinear Dynamics using Differential Parameterizations Der Technischen Fakultät der Universität Erlangen-Nürnberg zur Erlangung des Grades DOKTOR-INGENIEUR vorgelegt von
Tracking Controller Design for Nonlinear Dynamics using Differential Parameterizations Der Technischen Fakultät der Universität Erlangen-Nürnberg zur Erlangung des Grades DOKTOR-INGENIEUR vorgelegt von
Johannes Kepler Universität Linz Institut für Regelungstechnik und Prozessautomatisierung
 Johannes Keper Universität Linz Institut für Regeungstechnik und Prozessautomatisierung Schriftiche Prüfung aus Automatisierungstechnik Voresung, am 26. Mai 27 Name: Vorname(n): Matr.Nr.: SKZ: Aufgabe
Johannes Keper Universität Linz Institut für Regeungstechnik und Prozessautomatisierung Schriftiche Prüfung aus Automatisierungstechnik Voresung, am 26. Mai 27 Name: Vorname(n): Matr.Nr.: SKZ: Aufgabe
Klausur: Nichtlineare Regelungssysteme 1 Sommer 2018
 4 6 Fachgebiet Regelungstechnik Leiter: Prof. Dr.-Ing. Johann Reger Humboldt-Hörsaal Dienstag, den 24. 07. 2018 Beginn: 08.00 Uhr Bearbeitungszeit: 120 Min Modalitäten Als Hilfsmittel sind nur handschriftliche
4 6 Fachgebiet Regelungstechnik Leiter: Prof. Dr.-Ing. Johann Reger Humboldt-Hörsaal Dienstag, den 24. 07. 2018 Beginn: 08.00 Uhr Bearbeitungszeit: 120 Min Modalitäten Als Hilfsmittel sind nur handschriftliche
Liste der verwendeten Symbole 1. 1 Einleitung. 4 Literatur zu Kapitel 1 9 Aufgaben zu Kapitel 1 9
 Inlialt sverzeichnis Liste der verwendeten Symbole 1 1 Einleitung. 4 Literatur zu Kapitel 1 9 Aufgaben zu Kapitel 1 9 2 Analyse linearer zeitinvarianter Systeme im Frequenzbereich 10 2.1 Die Bewegungsgleichungen
Inlialt sverzeichnis Liste der verwendeten Symbole 1 1 Einleitung. 4 Literatur zu Kapitel 1 9 Aufgaben zu Kapitel 1 9 2 Analyse linearer zeitinvarianter Systeme im Frequenzbereich 10 2.1 Die Bewegungsgleichungen
3. Beschreibung dynamischer Systeme im Frequenzbereich
 3. Laplace-Transformation 3. Frequenzgang 3.3 Übertragungsfunktion Quelle: K.-D. Tieste, O.Romberg: Keine Panik vor Regelungstechnik!.Auflage, Vieweg&Teubner, Campus Friedrichshafen --- Regelungstechnik
3. Laplace-Transformation 3. Frequenzgang 3.3 Übertragungsfunktion Quelle: K.-D. Tieste, O.Romberg: Keine Panik vor Regelungstechnik!.Auflage, Vieweg&Teubner, Campus Friedrichshafen --- Regelungstechnik
Technische Universität Wien Institut für Automatisierungs- und Regelungstechnik. SCHRIFTLICHE PRÜFUNG zur VU Automatisierung am
 Technische Universität Wien Institut für Automatisierungs- und Regelungstechnik SCHRIFTLICHE PRÜFUNG zur VU Automatisierung am 3..7 Arbeitszeit: 5 min Name: Vorname(n): Matrikelnummer: Note: Aufgabe 3
Technische Universität Wien Institut für Automatisierungs- und Regelungstechnik SCHRIFTLICHE PRÜFUNG zur VU Automatisierung am 3..7 Arbeitszeit: 5 min Name: Vorname(n): Matrikelnummer: Note: Aufgabe 3
NANO III - MSR. Steuern Regeln Regelkreis PID-Regler Dimensionierung eines PID Reglers. Themen: Nano III MSR Physics Basel, Michael Steinacher 1
 NANO III - MSR Themen: Steuern Regeln Regelkreis PID-Regler Dimensionierung eines PID Reglers Nano III MSR Physics Basel, Michael Steinacher 1 Ziele 1. Unterschied Steuern Regeln 2. Was ist ein Regelkreis
NANO III - MSR Themen: Steuern Regeln Regelkreis PID-Regler Dimensionierung eines PID Reglers Nano III MSR Physics Basel, Michael Steinacher 1 Ziele 1. Unterschied Steuern Regeln 2. Was ist ein Regelkreis
Technische Universität Wien Institut für Automatisierungs- und Regelungstechnik. SCHRIFTLICHE PRÜFUNG zur VU Automatisierungstechnik am
 Technische Universität Wien Institut für Automatisierungs- und Regelungstechnik SCHRIFTLICHE PRÜFUNG zur VU Automatisierungstechnik am 26.2.21 Name: Vorname(n): Matrikelnummer: Note: Aufgabe 1 2 3 4 erreichbare
Technische Universität Wien Institut für Automatisierungs- und Regelungstechnik SCHRIFTLICHE PRÜFUNG zur VU Automatisierungstechnik am 26.2.21 Name: Vorname(n): Matrikelnummer: Note: Aufgabe 1 2 3 4 erreichbare
Technische Universität Wien Institut für Automatisierungs- und Regelungstechnik. SCHRIFTLICHE PRÜFUNG zur VU Automatisierung am
 Technische Universität Wien Institut für Automatisierungs- und Regelungstechnik SCHRIFTLICHE PRÜFUNG zur VU Automatisierung am 31.03.017 Arbeitszeit: 150 min Name: Vorname(n): Matrikelnummer: Note: Aufgabe
Technische Universität Wien Institut für Automatisierungs- und Regelungstechnik SCHRIFTLICHE PRÜFUNG zur VU Automatisierung am 31.03.017 Arbeitszeit: 150 min Name: Vorname(n): Matrikelnummer: Note: Aufgabe
Lösung zum Übungsblatt - Steuerbarkeit und Beobachtbarkeit
 Prof. Dr.-Ing. Jörg Raisch Dr.-Ing. Thomas Seel Fachgebiet Regelungssysteme Fakultät IV Elektrotechnik und Informatik Technische Universität Berlin Integrierte Veranstaltung Mehrgrößenregelsysteme Aufgabe
Prof. Dr.-Ing. Jörg Raisch Dr.-Ing. Thomas Seel Fachgebiet Regelungssysteme Fakultät IV Elektrotechnik und Informatik Technische Universität Berlin Integrierte Veranstaltung Mehrgrößenregelsysteme Aufgabe
Musterlösung Basisprüfung, Gruppe A Analysis I/II ) = 28π 6
 = 28π 6") Winter 8. Single Choice: 6J (a) Der Flächeninhalt einer Kreisscheibe mit Radius R ist gegeben durch πr. Aus Symmetriegründen ist der Flächeninhalt eines Kreisssektors mit 6 gegeben durch πr 6. Folglich
Winter 8. Single Choice: 6J (a) Der Flächeninhalt einer Kreisscheibe mit Radius R ist gegeben durch πr. Aus Symmetriegründen ist der Flächeninhalt eines Kreisssektors mit 6 gegeben durch πr 6. Folglich

Regelung eines Zweiarm Roboters
 4 6 Fachgebiet Regelungstechnik Leiter: Prof. Dr. Ing. Johann Reger Versuchsanleitung Praktikum NLS 1 Regelung eines Zweiarm Roboters Verantwortlicher Hochschullehrer: Versuchsbetreuer: Prof. Dr.-Ing Johann
4 6 Fachgebiet Regelungstechnik Leiter: Prof. Dr. Ing. Johann Reger Versuchsanleitung Praktikum NLS 1 Regelung eines Zweiarm Roboters Verantwortlicher Hochschullehrer: Versuchsbetreuer: Prof. Dr.-Ing Johann
Abschätzung des Optimierungshorizonts in MPC: eine quantitative Betrachtung
 Abschätzung des Optimierungshorizonts in MPC: eine quantitative Betrachtung Karl Worthmann Mathematisches Institut, Universität Bayreuth in Zusammenarbeit mit Lars Grüne gefördert vom DFG Schwerpunktprogramm
Abschätzung des Optimierungshorizonts in MPC: eine quantitative Betrachtung Karl Worthmann Mathematisches Institut, Universität Bayreuth in Zusammenarbeit mit Lars Grüne gefördert vom DFG Schwerpunktprogramm
Technische Universität Wien Institut für Automatisierungs- und Regelungstechnik. SCHRIFTLICHE PRÜFUNG zur VU Automatisierung am
 Technische Universität Wien Institut für Automatisierungs- und Regelungstechnik SCHRIFTLICHE PRÜFUNG zur VU Automatisierung am 9.05.07 Arbeitszeit: 50 min Name: Vorname(n): Matrikelnummer: Note: Aufgabe
Technische Universität Wien Institut für Automatisierungs- und Regelungstechnik SCHRIFTLICHE PRÜFUNG zur VU Automatisierung am 9.05.07 Arbeitszeit: 50 min Name: Vorname(n): Matrikelnummer: Note: Aufgabe
Formelsammlung zum Skriptum
 Systemtheorie und Regelungstechnik I - WS08/09 Formelsammlung zum Skriptum Kapitel 2 Satz 23 (Lokale Existenz und Eindeutigkeit) Es sei f (x, t) stückweise stetig in t und genüge der Abschätzung (Lipschitz-Bedingung)
Systemtheorie und Regelungstechnik I - WS08/09 Formelsammlung zum Skriptum Kapitel 2 Satz 23 (Lokale Existenz und Eindeutigkeit) Es sei f (x, t) stückweise stetig in t und genüge der Abschätzung (Lipschitz-Bedingung)
2. VORDIPLOMPRÜFUNG / D-MAVT Musterlösung. Um die Note 6 zu erlangen, genügen 6 vollständig und richtig gelöste Aufgaben.
 Institut für Mess- und Regeltechnik. VORDIPLOMPRÜFUNG / D-MAVT 8.. 3 REGELUNGSTECHNIK I Musterlösung Dauer der Prüfung: Anzahl der Aufgaben: Bewertung: Zur Beachtung: Erlaubte Hilfsmittel: Minuten 8 (gleich
Institut für Mess- und Regeltechnik. VORDIPLOMPRÜFUNG / D-MAVT 8.. 3 REGELUNGSTECHNIK I Musterlösung Dauer der Prüfung: Anzahl der Aufgaben: Bewertung: Zur Beachtung: Erlaubte Hilfsmittel: Minuten 8 (gleich
x 1 + u y 2 = 2 0 x 2 + 4u 2.
 3. Übung: Regelkreis Aufgabe 3.1. Gegeben sind die beiden linearen zeitkontinuierlichen Systeme 3 2 2 ẋ 1 = 6 5 x 1 + 1 u 1 6 2 3 [ ] y 1 = 2 x 1 (3.1a) (3.1b) und [ ] [ ] 8 15 1 ẋ 2 = x 2 + 6 1 4 [ ]
3. Übung: Regelkreis Aufgabe 3.1. Gegeben sind die beiden linearen zeitkontinuierlichen Systeme 3 2 2 ẋ 1 = 6 5 x 1 + 1 u 1 6 2 3 [ ] y 1 = 2 x 1 (3.1a) (3.1b) und [ ] [ ] 8 15 1 ẋ 2 = x 2 + 6 1 4 [ ]
Floquet Theorie (III) 1 Verhalten von Lösungen und Der Ljapunov-Exponent
 1 Verhalten von Lösungen und Der Ljapunov-Exponent") Floquet heorie (III Vortrag zum Seminar zu gewöhnlichen Differentialgleichungen, 25..2 Andreas Schmitz Nachdem Gabriela Ansteeg uns in die heorie eingeführt hat und Sebastian Monschang weitere Vorarbeit
Floquet heorie (III Vortrag zum Seminar zu gewöhnlichen Differentialgleichungen, 25..2 Andreas Schmitz Nachdem Gabriela Ansteeg uns in die heorie eingeführt hat und Sebastian Monschang weitere Vorarbeit
Regelungstechnik I (WS 15/16) Übung 2
 Übung 2") Regelungstechnik I (WS 5/6) Übung Prof. Dr. Ing. habil. Thomas Meurer Lehrstuhl für Regelungstechnik Aufgabe. (Linearität, Zeitinvarianz). Überprüfen Sie die folgenden dynamischen Systeme auf Linearität
Regelungstechnik I (WS 5/6) Übung Prof. Dr. Ing. habil. Thomas Meurer Lehrstuhl für Regelungstechnik Aufgabe. (Linearität, Zeitinvarianz). Überprüfen Sie die folgenden dynamischen Systeme auf Linearität
Regelungstechnik I (WS 18/19) Übung 6
 Übung 6") Regelungstechnik I (WS 8/9) Üung 6 Prof. Dr. Ing. hail. Thomas Meurer, Lehrstuhl für Regelungstechnik Aufgae. Berechnen Sie für die Streckenüertragungsfunktion ĝ(s) = s + 2 s(s 2 3s + 4) einen Regler durch
Regelungstechnik I (WS 8/9) Üung 6 Prof. Dr. Ing. hail. Thomas Meurer, Lehrstuhl für Regelungstechnik Aufgae. Berechnen Sie für die Streckenüertragungsfunktion ĝ(s) = s + 2 s(s 2 3s + 4) einen Regler durch
Mehrgrößenregelung. Aufgabensammlung
 Fakultät für Elektrotechnik und Informationstechnik Professur Regelungstechnik und Systemdynamik Prof. Dr.-Ing. Stefan Streif Mehrgrößenregelung Aufgabensammlung Dr.-Ing. Arne-Jens Hempel M.Sc. Thomas
Fakultät für Elektrotechnik und Informationstechnik Professur Regelungstechnik und Systemdynamik Prof. Dr.-Ing. Stefan Streif Mehrgrößenregelung Aufgabensammlung Dr.-Ing. Arne-Jens Hempel M.Sc. Thomas
SSRP 2009. 16. Steirisches Seminar über Regelungstechnik und Prozessautomatisierung. M. Horn, M. Hofbaur, N. Dourdoumas (Hrsg.)
") SSRP 29 6. Steirisches Seminar über Regelungstechnik und Prozessautomatisierung M. Horn, M. Hofbaur, N. Dourdoumas (Hrsg.) 8. -. 9. 29 Schloss Retzhof, Leibnitz, Österreich ISBN: 978-3-9439-8-7 Institut
SSRP 29 6. Steirisches Seminar über Regelungstechnik und Prozessautomatisierung M. Horn, M. Hofbaur, N. Dourdoumas (Hrsg.) 8. -. 9. 29 Schloss Retzhof, Leibnitz, Österreich ISBN: 978-3-9439-8-7 Institut
6. Lineare DGL-Systeme erster Ordnung
 HJ Oberle Differentialgleichungen I WiSe 22/3 6 Lineare DGL-Systeme erster Ordnung A Allgemeines Wir betrachten ein lineares DGL System erster Ordnung y (t = A(t y(t + b(t (6 und setzen voraus, dass die
HJ Oberle Differentialgleichungen I WiSe 22/3 6 Lineare DGL-Systeme erster Ordnung A Allgemeines Wir betrachten ein lineares DGL System erster Ordnung y (t = A(t y(t + b(t (6 und setzen voraus, dass die
a) Beschreiben Sie den Unterschied zwischen einer Regelung und einer Steuerung an Hand eines Blockschaltbildes.
 Beschreiben Sie den Unterschied zwischen einer Regelung und einer Steuerung an Hand eines Blockschaltbildes.") 144 Minuten Seite 1 NAME VORNAME MATRIKEL-NR. Aufgabe 1 (je 2 Punkte) a) Beschreiben Sie den Unterschied zwischen einer Regelung und einer Steuerung an Hand eines Blockschaltbildes. b) Was ist ein Mehrgrößensystem?
144 Minuten Seite 1 NAME VORNAME MATRIKEL-NR. Aufgabe 1 (je 2 Punkte) a) Beschreiben Sie den Unterschied zwischen einer Regelung und einer Steuerung an Hand eines Blockschaltbildes. b) Was ist ein Mehrgrößensystem?
Nichtlineare Systeme und Regelungen
 Jürgen Adamy Nichtlineare Systeme und Regelungen 2., bearbeitete und erweiterte Auflage j Springer Vieweg Inhaltsverzeichnis Blau nummerierte Abschnitte enthalten Grundlagen, die einen Basiskurs über nichtlineare
Jürgen Adamy Nichtlineare Systeme und Regelungen 2., bearbeitete und erweiterte Auflage j Springer Vieweg Inhaltsverzeichnis Blau nummerierte Abschnitte enthalten Grundlagen, die einen Basiskurs über nichtlineare
5 Trajektorienfolgeregelung
 5 Trajektorienfolgeregelung Der Inhalt dieser Übung ist der Entwurf von Trajektorienfolgeregelungen für flache und nichtflache Ausgänge im Rahmen eines theoretischen Beispiels und des Laborversuchs Helikopter.
5 Trajektorienfolgeregelung Der Inhalt dieser Übung ist der Entwurf von Trajektorienfolgeregelungen für flache und nichtflache Ausgänge im Rahmen eines theoretischen Beispiels und des Laborversuchs Helikopter.
Zusammenfassung der 4. Vorlesung. ensysteme. Mehrgrößensysteme
 Mehrgrößensysteme ensysteme Zusammenfassung der 4. Vorlesung Standardform für ffür r nicht steuerbare Systeme Pole Pole und und Nullstellen von von MIMO-Systemen Pole Pole der der Übertragungsmatrix? Smith-McMillan-Form
Mehrgrößensysteme ensysteme Zusammenfassung der 4. Vorlesung Standardform für ffür r nicht steuerbare Systeme Pole Pole und und Nullstellen von von MIMO-Systemen Pole Pole der der Übertragungsmatrix? Smith-McMillan-Form
Schriftliche Prüfung aus Nichtlineare elektrische Systeme Teil: Dourdoumas am
 TU Graz, Institut für Regelungs- und Automatisierungstechnik 1/3 Schriftliche Prüfung aus Nichtlineare elektrische Systeme Teil: Dourdoumas am 06. 10. 2014 Name / Vorname(n): Kennzahl / Matrikel-Nummer:
TU Graz, Institut für Regelungs- und Automatisierungstechnik 1/3 Schriftliche Prüfung aus Nichtlineare elektrische Systeme Teil: Dourdoumas am 06. 10. 2014 Name / Vorname(n): Kennzahl / Matrikel-Nummer:
Technische Universität Wien Institut für Automatisierungs- und Regelungstechnik. SCHRIFTLICHE PRÜFUNG zur VU Automatisierung am
 Technische Universität Wien Institut für Automatisierungs- und Regelungstechnik SCHRIFTLICHE PRÜFUNG zur VU Automatisierung am 8.6.13 Arbeitszeit: 1 min Name: Vorname(n): Matrikelnummer: Note: Aufgabe
Technische Universität Wien Institut für Automatisierungs- und Regelungstechnik SCHRIFTLICHE PRÜFUNG zur VU Automatisierung am 8.6.13 Arbeitszeit: 1 min Name: Vorname(n): Matrikelnummer: Note: Aufgabe
Lösungsskizzen zur Nachklausur
 sskizzen zur Nachklausur Mathematik II für die Fachrichtungen Biologie und Chemie Sommersemester 22 Aufgabe Es seien die folgenden Vektoren 2 v = 2, v 2 = und v 3 = 2 im R 3 gegeben. (a) Zeigen Sie, dass
sskizzen zur Nachklausur Mathematik II für die Fachrichtungen Biologie und Chemie Sommersemester 22 Aufgabe Es seien die folgenden Vektoren 2 v = 2, v 2 = und v 3 = 2 im R 3 gegeben. (a) Zeigen Sie, dass
Entwurf durch Polvorgabe
 Grundidee der Zustandsregelung Entwurf durch Polvorgabe Zustandsgröß ößen, innere Informationen aus dem Prozeß,, werden zurückgef ckgeführt. Vorteile: Bei Bei vollständiger Steuerbarkeit ist ist eine eine
Grundidee der Zustandsregelung Entwurf durch Polvorgabe Zustandsgröß ößen, innere Informationen aus dem Prozeß,, werden zurückgef ckgeführt. Vorteile: Bei Bei vollständiger Steuerbarkeit ist ist eine eine
x= f(x) p= U (x). (b) Zeigen Sie, dass auf jeder auf einem Intervall existierenden Lösung t x(t) die Energie E(t) := 1 2 p(t)2 + U(x(t)) x 1
 p= U (x). (b) Zeigen Sie, dass auf jeder auf einem Intervall existierenden Lösung t x(t) die Energie E(t) := 1 2 p(t)2 + U(x(t)) x 1") Blatt 1 03042006 H-Ch Grunau Aufgabe 1 Betrachten Sie die Differentialgleichung x= f(x) mit f = U und U C 2 ((α, β), R) und schreiben Sie diese in der Form x= p, p= U (x) (a) Skizzieren Sie die Phasenportraits
Blatt 1 03042006 H-Ch Grunau Aufgabe 1 Betrachten Sie die Differentialgleichung x= f(x) mit f = U und U C 2 ((α, β), R) und schreiben Sie diese in der Form x= p, p= U (x) (a) Skizzieren Sie die Phasenportraits
Lineare Systeme 1. Ordnung mit konstanten Koeffizienten
 Lineare Systeme. Ordnung mit konstanten Koeffizienten Wir betrachten ẋ = Ax + b(t) () mit A R n n und b( ) C (I, R n ) und die dazugehörige homogene Gleichung Ansatz: ẋ = Ax. () x(t) = ce λt mit c C n,
Lineare Systeme. Ordnung mit konstanten Koeffizienten Wir betrachten ẋ = Ax + b(t) () mit A R n n und b( ) C (I, R n ) und die dazugehörige homogene Gleichung Ansatz: ẋ = Ax. () x(t) = ce λt mit c C n,
UNIVERSITÄT DUISBURG - ESSEN Fakultät für Ingenieurwissenschaften, Abt. Maschinenbau, Professur für Steuerung, Regelung und Systemdynamik
 Regelungstechnik I (PO95), Regelungstechnik (PO02 Schiffstechnik), Regelungstechnik (Bachelor Wi.-Ing.) (180 Minuten) Seite 1 NAME VORNAME MATRIKEL-NR. Aufgabe 1 (je 2 Punkte) a) Erläutern Sie anhand eines
Regelungstechnik I (PO95), Regelungstechnik (PO02 Schiffstechnik), Regelungstechnik (Bachelor Wi.-Ing.) (180 Minuten) Seite 1 NAME VORNAME MATRIKEL-NR. Aufgabe 1 (je 2 Punkte) a) Erläutern Sie anhand eines
Regelungstechnik 1. Oldenbourg Verlag München Wien
 Regelungstechnik 1 Lineare und Nichtlineare Regelung, Rechnergestützter Reglerentwurf von Prof. Dr. Gerd Schulz 3., überarbeitete und erweiterte Auflage Oldenbourg Verlag München Wien Inhaltsverzeichnis
Regelungstechnik 1 Lineare und Nichtlineare Regelung, Rechnergestützter Reglerentwurf von Prof. Dr. Gerd Schulz 3., überarbeitete und erweiterte Auflage Oldenbourg Verlag München Wien Inhaltsverzeichnis
Gewöhnliche Differentialgleichungen
 Gewöhnliche Differentialgleichungen Aufgaben für das Seminar und zum selbständigen Üben 22. Januar 2018 Vorbereitende Übungen Aufgabe 1: Bestimmen Sie die Isoklinen zu den folgenden Differentialgleichungen
Gewöhnliche Differentialgleichungen Aufgaben für das Seminar und zum selbständigen Üben 22. Januar 2018 Vorbereitende Übungen Aufgabe 1: Bestimmen Sie die Isoklinen zu den folgenden Differentialgleichungen
Schriftliche Prüfung aus Nichtlineare elektrische Systeme am
 TU Graz, Institut für Regelungs- und Automatisierungstechnik 1 Schriftliche Prüfung aus Nichtlineare elektrische Systeme am 24. 10. 2008 Name / Vorname(n): Kenn-Matr.Nr.: 1 2 erreichbare Punkte 7 4 erreichte
TU Graz, Institut für Regelungs- und Automatisierungstechnik 1 Schriftliche Prüfung aus Nichtlineare elektrische Systeme am 24. 10. 2008 Name / Vorname(n): Kenn-Matr.Nr.: 1 2 erreichbare Punkte 7 4 erreichte