Führungskonzept eines. -Teil 2- Enrico Hensel Masterstudiengang Informatik Seminar-Ringvorlesung 2009
|
|
|
- Sophia Lenz
- vor 5 Jahren
- Abrufe
Transkript


1 Führungskonzept eines autonomen Fahrzeuges -Teil 2- Enrico Hensel Masterstudiengang Informatik Seminar-Ringvorlesung 2009
2 Einleitung Rückblick Motivation Bestandaufnahme Fahrzeugplattform Fahrzeugregelung Fahrzeugführung Risiken & Ausblick 2
3 Rückblick Faust - CaroloCup 2008 AW Autonomes Fahren, Ausweichen und Einparken Teamstärke: 6 Studenten 3
4 Motivation Faust - CaroloCup 2009 Autonomes Fahren, Ausweichen und Einparken, Erkennung und Befahren von Kreuzungen Zwei Teams: 15 Studenten 4
5 Motivation persönlich Schnell und sauber von Punkt A nach B A B Autonome Fahrt eines Fahrzeuges auf einer definierten Fahrbahn mit einer an die Gegebenheiten angepassten Geschwindigkeit und abgestimmten Lenkung. 5
6 Rückblick AW1 - Ausblick & Vision
7 Fahrzeugplattform VW Touareg VW Touareg Team 2: 8 Bachelor-Studenten aus den Fachrichtungen: - Informations- und Elektrotechnik - Technische Informatik Technische Daten: (Keine Änderungen zum Vorjahr) Sensoren: weitere Komponenten: 4 Ultraschallsensoren Nano ITX mit Windows Infrarotsensoren µcontroller-board mit OSEK 2 Inkrementalgeber 1 µeye-kamera 7


 1 Accelerometer 1 elektronischer")
8 Fahrzeugplattform Ford F-350 Technische Daten: Sensoren: Ford F-350 Team 1: 5 Master-Studenten der Informatik Unterstützend für Hardwareaufbau und µcontroller 2 Bachelorstudenten der Technischen Informatik weitere Komponenten: 4 Ultraschallsensoren 1 Asus AspireOne Linux 4 Infrarotsensoren 3 LPC-Sticks LPC Evolutionboard 2 Inkrementalgeber 1 Mainboard (Eigenentwicklung HAW) 1 Accelerometer 1 elektronischer Kompass 1 µeye-kamera 8
9 Fahrzeugplattform Ford F Systemübersicht 9
 - Erweiterung durch neue Sensorik und Kommunikationsprotokolle - Systemkommunikation im 25ms Takt Zwischenfazit: Zeitliche Planung weit überschritten, dafür eine")
10 Fahrzeugplattform Ford F Neuerungen - stabile Aufbau und präzise Mechanik - 3-Gang-Getriebe - bekannte Komponentenzusammenstellung, daher komplette Kontrolle über alle Komponenten und Signallaufzeiten (keine Blackbox) - Erweiterung durch neue Sensorik und Kommunikationsprotokolle - Systemkommunikation im 25ms Takt Zwischenfazit: Zeitliche Planung weit überschritten, dafür eine durchdachte Fahrzeugplattform mit Potential für neue interessante Softwarekonzepte. 10
11 Rückblick AW1 - Ausblick & Vision


12 Fahrzeugregelung Fahrzeugmodell 1. Bestimmung der Fahrzeugparameter - Fahrzeugvermessung - Analyse und Vermessung der Lenkung - Bestimmung von Fahrzeug-Geschwindigkeiten - Bestimmung der Bremswege aus unterschiedlichen Geschwindigkeiten - Getriebereibung 2. Sensoren und Signallaufzeiten IR-Sensoren 38-40ms US-Sensoren Schalllaufzeit z.b. 1m in 5ms/Richtung Inkrementalgeber 120 Interrupts / Umdrehung, bei Vmax 3. Gang alle 0,64 ms ein Impuls) 12
13 Fahrzeugregelung Fahrzeugmodell Annahmen: - Fahrzeug bewegt sich auf ebenen Boden - Gesamte Fahrzeugmasse wird im Fahrzeugschwerpunkt zusammengefasst - keine Querbeschleunigung - keine Nick- und Wankbewegung - linkes und rechtes Rad pro Achse werden in der Fahrzeugmitte zusammengefasst (Einspurmodell) 13
14 Fahrzeugregelung Fahrzeugmodell Kinematisches Fahrzeugmodell zur Beschreibung der Bewegungsabläufe Grundlage: Achsschenkellenkung / Ackermannlenkung 14
15 Fahrzeugregelung Regelungsansatz Das Konzept beinhaltet eine zweistufige Regelungsansatz 1. Regel: Geschwindigkeitsregelung - Erfassung der Sensordaten und Regelung der Geschwindigkeit auf dem ARM7 - Geschwindigkeitsvorgaben aus den Softwaremodulen von seitens des PCs 2. Regelung: Abstandsregelung - Abstandsregelung findet auf dem PC anhand der vorliegenden Bild- und Fahrzeuginformationen statt 15


16 Fahrzeugregelung Geschwindigkeitsregelung Simulation in Simulink auf Basis eines stark vereinfachten Modells (newton sche Bewegungsgleichungen) 16
17 Fahrzeugregelung Geschwindigkeitsregelung technische Einschränkung Keine Verzögerung durch PWM Denkbare Alternative LPC-Stick ARM7 V PWM Leistungsstufe Fahrtensteller Gleichstrom Gleichstrommotor 3,3V 7,2V 17
18 Fahrzeugregelung Abstandsregelung Schwerpunkt für die kommenden Wochen - Welche Fahrsituationen sind möglich und welche sind gültig? - Wie muss das Fahrzeug in den jeweiligen Situationen reagieren? - Was bedeutet das für die Abstandsregelung? 18


19 Fahrzeugregelung Abstandsregelung Fahrspurerkennung als Grundlage für die Fahrzeugführung TFALDA Polaris 19

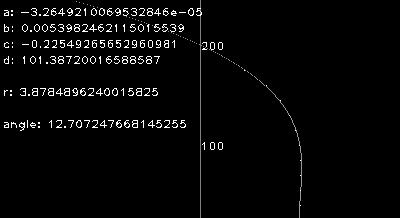
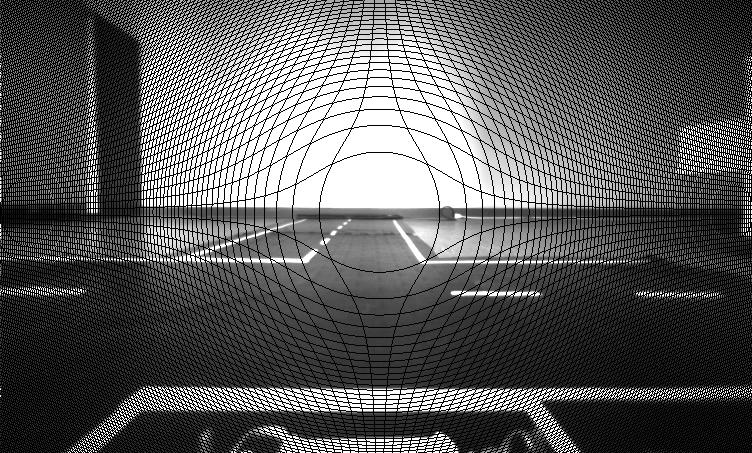

20 Fahrzeugregelung Abstandsregelung Polaris (Eike Jenning) 20
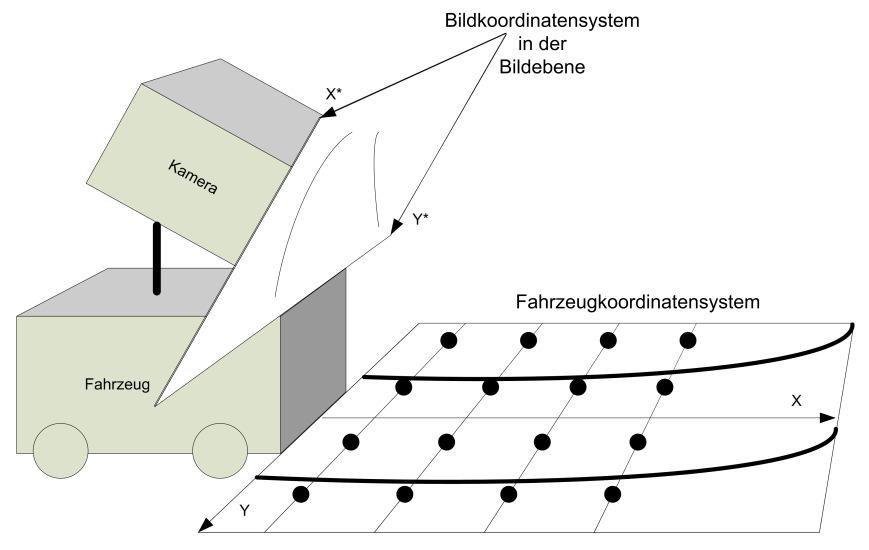
21 Fahrzeugregelung Abstandsregelung Bedeutung von Polaris für die Fahrzeugführung: Ich erhalte wichtige Informationen über: 1. Fahrbahnverlauf Kurvenradien / Krümmung, Entfernungen im Fahrzeugkoordinatensystem 2. Fahrzeuglage Position des Fahrzeuges auf der Fahrbahn 3. Fahrzeugorientierung Drehung der Fahrzeuglängsachse zur Fahrbahn 21

22 Rückblick AW1 - Ausblick & Vision
23 Fahrzeugführung Vorhaben Finden / Festlegen von Fahrkorridore Definieren von gültigen Fahrbereichen anhand von Kartenmaterial, Polaris und dem Fahrzeugmodell Trajektorienplanung Planen von Bewegungen innerhalb der festgelegten Korridore vom aktuellen Standpunkt zum Zielpunkt. Eine Idee: Verwendung von Splines Abstandsregelung Folgen des berechneten Weges Zone 0 Zone 2 Zone 1 Zone 0 23
24 Risiken 1. Abhängigkeit von der Fahrzeugplattform Änderungen im Fahrzeugaufbau Genauigkeit der Sensordaten 2. Abhängigkeit von Polaris & Mapping Stabilität von Polaris im Nahbereich Genauigkeit und Informationsgehalt der Karten 24
25 Ausblick CaroloCup 2009 & AW2 - Abstandsregelung für das Fahren entlang der Fahrspur - Ausarbeitung und Implementierung der Abstandsregelung - Konzept für die Führung des Fahrzeuges - (Autonomes Einparken) Masterarbeit - Fahrzeugführung Konzeptverfeinerung, Implementation und Test - Fahrsituationsabhänge Geschwindigkeitsanpassung (Tempomat-Gedanke) 25

26 Danke für eure Aufmerksamkeit! Fragen? 26
27 Literatur 1. Masterarbeit: Automatischer Ausweichassistent mit einer Laserscannerbasierten Abstandsregelung für ein fahrerloses Transportsystem Denis Schetler (HAW Hamburg 2007) 2. Kraftfahrzeugführung Ulrich Kramer, Hanser Computerunterstützung für Regelungsaufgaben Alexander Weinmann 4. Regelungstechnik 1, Systemtheoretische Grundlagen Analyse und Entwurf einschleifiger Regelungen Lunze, Springer WienNewYork Regelungsstrategien für die automatische Fahrzeugführung Längs und Querregelung; Spurwechsel- und Überholmanöver R. Mayr
28 Literatur 6. Masterarbeit: Systemidentifikation eines autonomen Fahrzeugs mit einer robusten, kamerabasierten Fahrspurerkennung in Echtzeit Eike Jenning (HAW Hamburg 2008) 7. Empirische Verfahren zur Reglereinstellung Prof. Dr. Ing habil. Lothar Litz (Uni Kaiserslautern) 28
Führungskonzept eines autonomen Fahrzeuges. Enrico Hensel Masterstudiengang Informatik AW1 2008
 Führungskonzept eines autonomen Fahrzeuges Enrico Hensel Masterstudiengang Informatik AW1 2008 Einleitung Motivation Fahrzeugführung Bestandsaufnahme zu den Fahrzeugprojekten Herausforderungen in der Fahrzeugführung
Führungskonzept eines autonomen Fahrzeuges Enrico Hensel Masterstudiengang Informatik AW1 2008 Einleitung Motivation Fahrzeugführung Bestandsaufnahme zu den Fahrzeugprojekten Herausforderungen in der Fahrzeugführung
Bahnplanung am stationären Hindernis
 Bahnplanung am stationären Hindernis von Ilona Blanck 01. Dez 2008 im Rahmen der Seminar Ring Vorlesung des Masterstudiums Informatik der Fakultät Technik und Informatik der HAW Hamburg Übersicht 1. Motivation
Bahnplanung am stationären Hindernis von Ilona Blanck 01. Dez 2008 im Rahmen der Seminar Ring Vorlesung des Masterstudiums Informatik der Fakultät Technik und Informatik der HAW Hamburg Übersicht 1. Motivation
Seminarbericht. Enrico Hensel. Führungskonzept eines autonomen Fahrzeuges. Vorabbetrachtung und Bewegungsmodell
 Seminarbericht Enrico Hensel Führungskonzept eines autonomen Fahrzeuges Vorabbetrachtung und Bewegungsmodell Fakultät Technik und Informatik Department Informatik Faculty of Engineering and Computer Science
Seminarbericht Enrico Hensel Führungskonzept eines autonomen Fahrzeuges Vorabbetrachtung und Bewegungsmodell Fakultät Technik und Informatik Department Informatik Faculty of Engineering and Computer Science
Inhaltsverzeichnis. Abbildungsverzeichnis 3. 1 Einleitung 4
 Ausarbeitungsarbeit Filip Nowacki Konzeptentwicklung eines Sicherheits- und Navigationsmoduls basierend auf einer geometrischen Umgebungskartierung für autonom fahrende Systeme Fakultät Technik und Informatik
Ausarbeitungsarbeit Filip Nowacki Konzeptentwicklung eines Sicherheits- und Navigationsmoduls basierend auf einer geometrischen Umgebungskartierung für autonom fahrende Systeme Fakultät Technik und Informatik
verteilte Systeme (Anwendung Quadrocopter) an.
 an.") verteilte Systeme 15.05.2012 Quadrocopter für Aufgaben im Indoor-Bereich (Luftfahrtinformatik). Die Systeme sollen in die Lage versetzt werden selbstständig (autonom) zu agieren (z.b. Suchen durchführen)
verteilte Systeme 15.05.2012 Quadrocopter für Aufgaben im Indoor-Bereich (Luftfahrtinformatik). Die Systeme sollen in die Lage versetzt werden selbstständig (autonom) zu agieren (z.b. Suchen durchführen)
Kartenerstellung und Navigation
 Kartenerstellung und Navigation zur Positionserkennung autonomer Fahrzeuge von Ilona Blanck 27. Mai 2008 im Rahmen der Anwendungen I Vorlesung des Masterstudiums Informatik der Fakultät Technik und Informatik
Kartenerstellung und Navigation zur Positionserkennung autonomer Fahrzeuge von Ilona Blanck 27. Mai 2008 im Rahmen der Anwendungen I Vorlesung des Masterstudiums Informatik der Fakultät Technik und Informatik
Anwendungen und Methoden der modernen Robotik
 Anwendungen und Methoden der modernen Robotik Jianwei Zhang FB Informatik Universität Hamburg Das heutige Programm Motivation der Seminararbeit: eine kurze Einführung in die Robotik, Besonderheiten Einführung
Anwendungen und Methoden der modernen Robotik Jianwei Zhang FB Informatik Universität Hamburg Das heutige Programm Motivation der Seminararbeit: eine kurze Einführung in die Robotik, Besonderheiten Einführung
Stationäre Kreisfahrt
 Stationäre Kreisfahrt Ansprechpartner: Dipl.-Ing.(FH) Paul Balzer EMail: balzer@htw-dresden.de Telefon: 0351 462 2394 Inhaltsverzeichnis 1 Motivation 0 2 Fahrphysikalische Grundlagen 1 2.1 Lineares Einspurmodell.............................
Stationäre Kreisfahrt Ansprechpartner: Dipl.-Ing.(FH) Paul Balzer EMail: balzer@htw-dresden.de Telefon: 0351 462 2394 Inhaltsverzeichnis 1 Motivation 0 2 Fahrphysikalische Grundlagen 1 2.1 Lineares Einspurmodell.............................
MAN ProfiDrive Fahrtrainings von Profis für Profis
 MAN ProfiDrive Fahrtrainings von Profis für Profis Sicherheits- und Assistenzsysteme Gesetzliche Maßnahmen 2015 EBA < 3 > Notbremsassistent (EBA) < 4 > Bremswege VW Golf VII 100km/h -> 0km/h 33,6 m Porsche
MAN ProfiDrive Fahrtrainings von Profis für Profis Sicherheits- und Assistenzsysteme Gesetzliche Maßnahmen 2015 EBA < 3 > Notbremsassistent (EBA) < 4 > Bremswege VW Golf VII 100km/h -> 0km/h 33,6 m Porsche
Einsatz von Reinforcement Learning in der Modellfahrzeugnavigation
 Einsatz von Reinforcement Learning in der Modellfahrzeugnavigation von Manuel Trittel Informatik HAW Hamburg Vortrag im Rahmen der Veranstaltung AW1 im Masterstudiengang, 02.12.2008 der Anwendung Themeneinordnung
Einsatz von Reinforcement Learning in der Modellfahrzeugnavigation von Manuel Trittel Informatik HAW Hamburg Vortrag im Rahmen der Veranstaltung AW1 im Masterstudiengang, 02.12.2008 der Anwendung Themeneinordnung
Intelligente Transportsysteme
 Intelligente Transportsysteme Universität Ulm Fakultät für Informatik Proseminar Künstliche Intelligenz SS 2004 Michael Arnold Typen intelligenter Transportsysteme Fahrer-Assistenz-Systeme Mensch hat Kontrolle
Intelligente Transportsysteme Universität Ulm Fakultät für Informatik Proseminar Künstliche Intelligenz SS 2004 Michael Arnold Typen intelligenter Transportsysteme Fahrer-Assistenz-Systeme Mensch hat Kontrolle
Fortgeschrittenenpraktikum Inverses Pendel
 Fortgeschrittenenpraktikum Inverses Pendel Johannes Vogt, Stefan Richter Robotiklabor an der Universität Heidelberg Übersicht Team und Betreuer Aufgabenstellung Theoretische Modellierung des physikalischen
Fortgeschrittenenpraktikum Inverses Pendel Johannes Vogt, Stefan Richter Robotiklabor an der Universität Heidelberg Übersicht Team und Betreuer Aufgabenstellung Theoretische Modellierung des physikalischen
Fahrerassistenzsysteme bei der BMW Group
 Dr.-Ing. Carsten Haß Entwicklung Fahrdynamik Regelungstechnisches Kolloquium, Dortmund Seite 2 Übersicht 1. Einführung 2. ACC und ACC Stop&Go 3. Entwicklungsmethoden und Werkzeuge 4. Ausbildung und Praxis
Dr.-Ing. Carsten Haß Entwicklung Fahrdynamik Regelungstechnisches Kolloquium, Dortmund Seite 2 Übersicht 1. Einführung 2. ACC und ACC Stop&Go 3. Entwicklungsmethoden und Werkzeuge 4. Ausbildung und Praxis
Entwicklung einer Motorsteuerung für zwei Getriebemotoren
 Übersicht Motivation Hardware Software Fazit Ende Entwicklung einer Motorsteuerung für zwei Getriebemotoren Studienarbeit, Abschlussvortrag T. K. Technische Universität Braunschweig Institut für Betriebssysteme
Übersicht Motivation Hardware Software Fazit Ende Entwicklung einer Motorsteuerung für zwei Getriebemotoren Studienarbeit, Abschlussvortrag T. K. Technische Universität Braunschweig Institut für Betriebssysteme
Digitaler Knoten 4.0
 Digitaler Knoten 4.0 Gestaltung und Regelung städtischer Knotenpunkte für sicheres und effizientes, automatisiertes Fahren im gemischten Verkehr 01.12.2017 Fachtagung Automatisiertes und vernetztes Fahren
Digitaler Knoten 4.0 Gestaltung und Regelung städtischer Knotenpunkte für sicheres und effizientes, automatisiertes Fahren im gemischten Verkehr 01.12.2017 Fachtagung Automatisiertes und vernetztes Fahren
Ein Structure and Motion Ansatz zur Umfeldrekonstruktion in komplexen Fahrzeugumgebungen
 Sicherheit durch Fahrerassistenz 2010 Ein Structure and Motion Ansatz zur Umfeldrekonstruktion in komplexen Fahrzeugumgebungen Wojciech Derendarz, Thorsten Graf Volkswagen AG Friedrich M. Wahl TU Braunschweig,
Sicherheit durch Fahrerassistenz 2010 Ein Structure and Motion Ansatz zur Umfeldrekonstruktion in komplexen Fahrzeugumgebungen Wojciech Derendarz, Thorsten Graf Volkswagen AG Friedrich M. Wahl TU Braunschweig,
Entwicklung einer Anwendung für die Microsoft HoloLens
 Entwicklung einer Anwendung für die Microsoft HoloLens Lehrstuhl für Eingebettete Systeme der Informationstechnik (ESIT) Entwicklung einer Anwendung für die Microsoft HoloLens Betreuer: Florian Fricke
Entwicklung einer Anwendung für die Microsoft HoloLens Lehrstuhl für Eingebettete Systeme der Informationstechnik (ESIT) Entwicklung einer Anwendung für die Microsoft HoloLens Betreuer: Florian Fricke
Eine Anleitung zur Entwicklung von Simulink-Targets für die Lehre. 10. MBEES 2014, Dagstuhl
 Eine Anleitung zur Entwicklung von Simulink-Targets für die Lehre 10. MBEES 2014, Dagstuhl Frank Tränkle Automotive Systems Engineering frank.traenkle@hs-heilbronn.de Inhalt Lehrveranstaltungen für Modellbasierte
Eine Anleitung zur Entwicklung von Simulink-Targets für die Lehre 10. MBEES 2014, Dagstuhl Frank Tränkle Automotive Systems Engineering frank.traenkle@hs-heilbronn.de Inhalt Lehrveranstaltungen für Modellbasierte
Ausarbeitung Anwendungen 1
 Hochschule für Angewandte Wissenschaften Hamburg Hamburg University of Applied Sciences Ausarbeitung Anwendungen 1 Ivo Nikolov Adaptive Kameraparametrierung zur optimalen Fahrspurerkennung und -Verfolgung
Hochschule für Angewandte Wissenschaften Hamburg Hamburg University of Applied Sciences Ausarbeitung Anwendungen 1 Ivo Nikolov Adaptive Kameraparametrierung zur optimalen Fahrspurerkennung und -Verfolgung
Seminar Robotik WS 02/03
 Seminar Robotik WS 02/03 Innovative Informatik Anwendungen: Autonomes Fahren Fahrassistenzsysteme im KFZ Anwendungen Dezember 2003 Solange wir Äpfel nicht per E-Mail versenden können, sind Sie auf uns
Seminar Robotik WS 02/03 Innovative Informatik Anwendungen: Autonomes Fahren Fahrassistenzsysteme im KFZ Anwendungen Dezember 2003 Solange wir Äpfel nicht per E-Mail versenden können, sind Sie auf uns
Biologisch motivierter SLAM Algorithmus
 HAW Hamburg 01. Dezember 2011 Gliederung 1 Einführung 2 RatSLAM 3 Aussicht für Master 2 / 23 Einführung Was ist SLAM SLAM bedeutet: Simultaneous Localization and Mapping Erstellung einer Karte durch mobilen
HAW Hamburg 01. Dezember 2011 Gliederung 1 Einführung 2 RatSLAM 3 Aussicht für Master 2 / 23 Einführung Was ist SLAM SLAM bedeutet: Simultaneous Localization and Mapping Erstellung einer Karte durch mobilen
ES-Projektseminar (SS 2012)
") ES-Projektseminar (SS 2012) Endvortrag Team Justice League of America Dominik Matthias [Team ] Pascal Stephen Vorname Name; ES Real-Time Systems Lab Prof. Dr. rer. nat. Andy Schürr Dept. of Electrical
ES-Projektseminar (SS 2012) Endvortrag Team Justice League of America Dominik Matthias [Team ] Pascal Stephen Vorname Name; ES Real-Time Systems Lab Prof. Dr. rer. nat. Andy Schürr Dept. of Electrical
VERNETZUNGSTECHNOLOGIEN ALS BEITRAG ZUR INTEGRIERTEN KOLLISIONSVERMEIDUNG. DR. MORITZ WERLING, PHILIPP REINISCH, PROF. DR.
 München, 16. Mai 2012 VERNETZUNGSTECHNOLOGIEN ALS BEITRAG ZUR INTEGRIERTEN KOLLISIONSVERMEIDUNG. DR. MORITZ WERLING, PHILIPP REINISCH, PROF. DR. DIETER SCHRAMM AGENDA. Motivation Aktive Gefahrenbremsung
München, 16. Mai 2012 VERNETZUNGSTECHNOLOGIEN ALS BEITRAG ZUR INTEGRIERTEN KOLLISIONSVERMEIDUNG. DR. MORITZ WERLING, PHILIPP REINISCH, PROF. DR. DIETER SCHRAMM AGENDA. Motivation Aktive Gefahrenbremsung
HAW Hamburg Anwendung 1 - Vortrag Andrej Rull
 HAW Hamburg Anwendung 1 - Vortrag Andrej Rull 02122008 1 Gliederung o Motivation o Der Anwendungsfall o Das SLAM Problem o Lösungsansätze und Algorithmen o Zusammenfassung o Ausblick auf AW2 2 Motivation
HAW Hamburg Anwendung 1 - Vortrag Andrej Rull 02122008 1 Gliederung o Motivation o Der Anwendungsfall o Das SLAM Problem o Lösungsansätze und Algorithmen o Zusammenfassung o Ausblick auf AW2 2 Motivation
Fahrerassistenzsysteme am Motorrad am Beispiel ABS
 Aktive Sicherheit durch 11./12. März 2004 systeme am Motorrad am Beispiel ABS Sind systeme am Motorrad sinnvoll? Potentielle Problembereiche -Übertragbarkeit von Systemen vom Pkw auf das Motorrad nur unter
Aktive Sicherheit durch 11./12. März 2004 systeme am Motorrad am Beispiel ABS Sind systeme am Motorrad sinnvoll? Potentielle Problembereiche -Übertragbarkeit von Systemen vom Pkw auf das Motorrad nur unter
Die Teleoperation als Ansatz zur fahrerlosen Fahrzeugführung
 Die Teleoperation als Ansatz zur fahrerlosen Fahrzeugführung Sebastian Gnatzig, Erick Haas, Prof. Dr. Markus Lienkamp Gliederung Einleitung Stand der Technik Vorgehen Durchführung Diskussion Zusammenfassung
Die Teleoperation als Ansatz zur fahrerlosen Fahrzeugführung Sebastian Gnatzig, Erick Haas, Prof. Dr. Markus Lienkamp Gliederung Einleitung Stand der Technik Vorgehen Durchführung Diskussion Zusammenfassung
Dokumentation Roboterfahrzeug
 Dokumentation Roboterfahrzeug Gruppe 6 Sensor und Regelungssysteme Praktikum Mechatronik Master SS16 Matthias Wolf, Fabian Pfeffer Inhaltsverzeichnis Inhaltsverzeichnis Inhaltsverzeichnis... I Abbildungsverzeichnis...
Dokumentation Roboterfahrzeug Gruppe 6 Sensor und Regelungssysteme Praktikum Mechatronik Master SS16 Matthias Wolf, Fabian Pfeffer Inhaltsverzeichnis Inhaltsverzeichnis Inhaltsverzeichnis... I Abbildungsverzeichnis...
AUTONOMES KREISELSTABILISIERTES FAHRRAD
 AUTONOMES KREISELSTABILISIERTES FAHRRAD Ziel: Positionsregelung eines stabilisierten Fahrrades Modellbildung Gesamtfahrrad Analyse Eigenstabilität (Gyroeffekt, Nachlaufeffekt) Hardwareadaption Lenkmotor
AUTONOMES KREISELSTABILISIERTES FAHRRAD Ziel: Positionsregelung eines stabilisierten Fahrrades Modellbildung Gesamtfahrrad Analyse Eigenstabilität (Gyroeffekt, Nachlaufeffekt) Hardwareadaption Lenkmotor
MAN ProfiDrive Fahrtrainings von Profis für Profis
 MAN ProfiDrive Fahrtrainings von Profis für Profis Sicherheits- und Assistenzsysteme Notbremsassistent (EBA) < 3 > Notbremsassistent (EBA) Ziel: Reduzierung der Unfallzahlen und Kosten durch den Schutz
MAN ProfiDrive Fahrtrainings von Profis für Profis Sicherheits- und Assistenzsysteme Notbremsassistent (EBA) < 3 > Notbremsassistent (EBA) Ziel: Reduzierung der Unfallzahlen und Kosten durch den Schutz
HIL basierte Kalibrierung anhand des HAWKS Rennwagens. Referent: Daniel Lorenz
 HIL basierte Kalibrierung anhand des HAWKS Rennwagens Agenda Einführung Simulationen & X-in-the-loop HAWKS Rennwagen Anforderungen Test-Aufbau Ausblick und mögliche Risiken Fragen und Antworten 2 Einführung
HIL basierte Kalibrierung anhand des HAWKS Rennwagens Agenda Einführung Simulationen & X-in-the-loop HAWKS Rennwagen Anforderungen Test-Aufbau Ausblick und mögliche Risiken Fragen und Antworten 2 Einführung
Studienbrief Systemtheorie und regelungstechnik
 Studienbrief Systemtheorie und regelungstechnik Weiterbildender Masterstudiengang Sensorsystemtechnik der Fakultät für Ingenieurwissenschaften und Informatik mit dem Abschluss Master of Science (M. Sc.)
Studienbrief Systemtheorie und regelungstechnik Weiterbildender Masterstudiengang Sensorsystemtechnik der Fakultät für Ingenieurwissenschaften und Informatik mit dem Abschluss Master of Science (M. Sc.)
Tracking bewegter Objekte in Videosequenzen
 Wintersemester 2009/2010 Fakultät Technik und Informatik Übersicht Aufgabenstellung Aktueller Lösungsansatz Forschung / Stand der Technik Methoden der Objekterkennung in der digitalen Bildverarbeitung
Wintersemester 2009/2010 Fakultät Technik und Informatik Übersicht Aufgabenstellung Aktueller Lösungsansatz Forschung / Stand der Technik Methoden der Objekterkennung in der digitalen Bildverarbeitung
Programmierung mit LEGO MINDSTORMS NXT. I. Informatik und algorithmisches Problemlösen
 Programmierung mit LEGO MINDSTORMS NXT I. Informatik und algorithmisches Problemlösen Prof. Dr. Karsten Berns Arbeitsgruppe Robotersysteme Fachbereich Informatik Technische Universität Kaiserslautern 30.09.2010
Programmierung mit LEGO MINDSTORMS NXT I. Informatik und algorithmisches Problemlösen Prof. Dr. Karsten Berns Arbeitsgruppe Robotersysteme Fachbereich Informatik Technische Universität Kaiserslautern 30.09.2010
AG ROBOTERSYSTEME FACHBEREICH INFORMATIK AN DER UNIVERSITÄT KAISERSLAUTERN. Praktikum. Praktikum Spezifikation. Gruppe A
 AG ROBOTERSYSTEME FACHBEREICH INFORMATIK AN DER UNIVERSITÄT KAISERSLAUTERN Praktikum Praktikum Spezifikation Gruppe A 19. Dezember 2006 Inhaltsverzeichnis 1 Praktikum Spezifikation 3 1.1 Praktikumsteilnehmer..........................
AG ROBOTERSYSTEME FACHBEREICH INFORMATIK AN DER UNIVERSITÄT KAISERSLAUTERN Praktikum Praktikum Spezifikation Gruppe A 19. Dezember 2006 Inhaltsverzeichnis 1 Praktikum Spezifikation 3 1.1 Praktikumsteilnehmer..........................
Session: 8 itsowl-tt-scyro Schweißen von Mischwellen mittels hybridkinematischer Roboter 06. Juli 2016 Bielefeld.
 Session: 8 itsowl-tt-scyro Schweißen von Mischwellen mittels hybridkinematischer Roboter 06. Juli 2016 Bielefeld www.its-owl.de Agenda Abschlusspräsentation Einführung Zielsetzung Ergebnisse Resümee und
Session: 8 itsowl-tt-scyro Schweißen von Mischwellen mittels hybridkinematischer Roboter 06. Juli 2016 Bielefeld www.its-owl.de Agenda Abschlusspräsentation Einführung Zielsetzung Ergebnisse Resümee und
Bachelorarbeit Schwingungsdämpfung
 Quelle: www.pixabay.com Bachelorarbeit Schwingungsdämpfung Aufbau eines Demonstrators zur Schwingungsunterdrückung einer mechanischen Struktur Herleitung eines mathematischen Modells Verbesserung des Aktuators
Quelle: www.pixabay.com Bachelorarbeit Schwingungsdämpfung Aufbau eines Demonstrators zur Schwingungsunterdrückung einer mechanischen Struktur Herleitung eines mathematischen Modells Verbesserung des Aktuators
Künstliche Intelligenz
 Künstliche Intelligenz Abschlusspräsentation Gruppe: Blau_KI1112 1 Team Blau_KI1112 Harjin Esmael Jochen Hansch Nils Hühn Felix Marx Nikolai Warkentin Alexander Wecker 2 Inhalt Aufgabenstellung Arbeitsumgebung
Künstliche Intelligenz Abschlusspräsentation Gruppe: Blau_KI1112 1 Team Blau_KI1112 Harjin Esmael Jochen Hansch Nils Hühn Felix Marx Nikolai Warkentin Alexander Wecker 2 Inhalt Aufgabenstellung Arbeitsumgebung
Mess- und Regelungstechnik
 Mess- und Regelungstechnik Professor: Dr. Löffler Mang Semester: WS 00/01 Inhaltsverzeichnis 1. Thema 2. Das Mind- Storm- System 2.1 Der RCX 2.2 Die Sensoren 2.2.1 Der Tastsensor 2.2.2 Der Lichtsensor
Mess- und Regelungstechnik Professor: Dr. Löffler Mang Semester: WS 00/01 Inhaltsverzeichnis 1. Thema 2. Das Mind- Storm- System 2.1 Der RCX 2.2 Die Sensoren 2.2.1 Der Tastsensor 2.2.2 Der Lichtsensor
1. Zeichnen Sie das v(t) und das a(t)-diagramm für folgende Bewegung. 3 Der Körper fährt eine Strecke von 30 m mit seiner bisherigen
 und das a(t)-diagramm für folgende Bewegung. 3 Der Körper fährt eine Strecke von 30 m mit seiner bisherigen") Staatliche Technikerschule Waldmünchen Fach: Physik Häufig verwendete Formeln aus der Europa-Formelsammlung Lineare Bewegungen: Gleichförmige Bewegung: S. 11/ 2-7 Beschleunigte Bewegung: S. 12 / 2-20,
Staatliche Technikerschule Waldmünchen Fach: Physik Häufig verwendete Formeln aus der Europa-Formelsammlung Lineare Bewegungen: Gleichförmige Bewegung: S. 11/ 2-7 Beschleunigte Bewegung: S. 12 / 2-20,
Systemkonzept eines modularen HiL-Systems für modellbasierte Funktionsentwicklung fahrzeugmechatronischer Systeme
 Systemkonzept eines modularen HiL-Systems für modellbasierte Funktionsentwicklung fahrzeugmechatronischer Systeme Workshop der ASIM/GI-Fachgruppen, 09./10.03.2017, Ulm Prof. Dr.-Ing. X. Liu-Henke M.Eng.
Systemkonzept eines modularen HiL-Systems für modellbasierte Funktionsentwicklung fahrzeugmechatronischer Systeme Workshop der ASIM/GI-Fachgruppen, 09./10.03.2017, Ulm Prof. Dr.-Ing. X. Liu-Henke M.Eng.
Erweiterung eines Verfahrens zur automatisierten Parameteridentifikation eines Fahrzeugmodells
 Erweiterung eines Verfahrens zur automatisierten Parameteridentifikation eines Fahrzeugmodells Sebastian Wildfeuer Parameteridentifikation > 23. September 2008 > Folie 1 Themenübersicht Ausgangssituation,
Erweiterung eines Verfahrens zur automatisierten Parameteridentifikation eines Fahrzeugmodells Sebastian Wildfeuer Parameteridentifikation > 23. September 2008 > Folie 1 Themenübersicht Ausgangssituation,
Sturzvermeidung von zweibeinigen Robotern durch reflexartige Reaktionen
 Sturzvermeidung von zweibeinigen Robotern durch reflexartige Reaktionen Oliver Höhn Appelstr. 11, 30167 Hannover http://www.irt.uni-hannover.de Page: 2 Gliederung Motivation Falluntersuchungen Sensorik
Sturzvermeidung von zweibeinigen Robotern durch reflexartige Reaktionen Oliver Höhn Appelstr. 11, 30167 Hannover http://www.irt.uni-hannover.de Page: 2 Gliederung Motivation Falluntersuchungen Sensorik
AW 1 - Vortrag. Simulationsmodell für visuell geführte Roboter. von Bernd Pohlmann. Betreuender: Prof. Dr. Andreas Meisel
 AW 1 - Vortrag Simulationsmodell für visuell geführte Roboter von Betreuender: Prof. Dr. Andreas Meisel Inhalt 1. Motivation 2. Ziel 3. Einführung Robotik 4. Kinematik 5. Denavit-Hartenberg 6. Kameramodell
AW 1 - Vortrag Simulationsmodell für visuell geführte Roboter von Betreuender: Prof. Dr. Andreas Meisel Inhalt 1. Motivation 2. Ziel 3. Einführung Robotik 4. Kinematik 5. Denavit-Hartenberg 6. Kameramodell
Materialflusssystemen
 Seite 1 / 21 Topographieerfassung und Berechnung von Bewegungsbahnen für Instandhaltungseinheiten auf Materialflusssystemen Dipl.-Ing. Matthias Bücker Dipl.-Ing. Tobias Brutscheck Teilprojektleiter: Prof.
Seite 1 / 21 Topographieerfassung und Berechnung von Bewegungsbahnen für Instandhaltungseinheiten auf Materialflusssystemen Dipl.-Ing. Matthias Bücker Dipl.-Ing. Tobias Brutscheck Teilprojektleiter: Prof.
Komponenten- HIL und Fahrzeug- HIL sind heute weit verbreitet. i.w. höhere Qualität der Fahrzeuge und Steuergeräte
 HIL Aktueller Status ECU Validierung mit HIL Technologie Komponenten- HIL und Fahrzeug- HIL sind heute weit verbreitet fester Bestandteil im Fahrzeug- Entwicklungsprozess Wertschöpfung und Nutzen für den
HIL Aktueller Status ECU Validierung mit HIL Technologie Komponenten- HIL und Fahrzeug- HIL sind heute weit verbreitet fester Bestandteil im Fahrzeug- Entwicklungsprozess Wertschöpfung und Nutzen für den
Lehr- und Forschungsprojekt Balancer
 Lehr- und Forschungsprojekt Balancer Prof. Dr.-Ing. Tobias Flämig-Vetter Email: tobias.flaemig@dhbw-stuttgart.de Tel: +49 711 1849 636 http://wwwlehre.dhbw-stuttgart.de/~flaemig/studienarbeiten/balancer/
Lehr- und Forschungsprojekt Balancer Prof. Dr.-Ing. Tobias Flämig-Vetter Email: tobias.flaemig@dhbw-stuttgart.de Tel: +49 711 1849 636 http://wwwlehre.dhbw-stuttgart.de/~flaemig/studienarbeiten/balancer/
EINLEITUNG MAGNETSCHWEBETECHNIK
 EINLEITUNG Magnetschwebebahnen sind Transportmittel der Zukunft. Hohe Beschleunigungen und Geschwindigkeiten bedeuten eine Verbesserung der Mobilität im Transportwesen. Die Probleme dieser noch jungen
EINLEITUNG Magnetschwebebahnen sind Transportmittel der Zukunft. Hohe Beschleunigungen und Geschwindigkeiten bedeuten eine Verbesserung der Mobilität im Transportwesen. Die Probleme dieser noch jungen
Sensorik. Thomas Röfer. Steuerung und Regelung Interne Sensorik Rotation, Belastung,... Externe Sensorik Taktil, Infrarot, Ultraschall,...
 Sensorik Thomas Röfer Steuerung und Regelung Interne Sensorik Rotation, Belastung,... Externe Sensorik Taktil, Infrarot, Ultraschall,... Kognitive Robotik I Rückblick Motorik Antriebs-/Lenkachse Differenzieller
Sensorik Thomas Röfer Steuerung und Regelung Interne Sensorik Rotation, Belastung,... Externe Sensorik Taktil, Infrarot, Ultraschall,... Kognitive Robotik I Rückblick Motorik Antriebs-/Lenkachse Differenzieller
Prof. Dr.-Ing. Peter Schulz
 Wahlpflichtfächer für Antriebe und Automation Motivation: Antriebe Antriebssysteme enthalten Mess- und Regelkreise, z.b.: - Drehzahlmessung und -regelung - Positionserfassung und -regelung - Verschleißmessung
Wahlpflichtfächer für Antriebe und Automation Motivation: Antriebe Antriebssysteme enthalten Mess- und Regelkreise, z.b.: - Drehzahlmessung und -regelung - Positionserfassung und -regelung - Verschleißmessung
Berechnen Sie die Ersatzfedersteifigkeiten für die Gruppierungen, die am oberen (c o ) und am unteren (c u ) Seil befestigt sind.
 und am unteren (c u ) Seil befestigt sind.") Aufgabe 1 (Seite 1 von 3) a) Das nebenstehende System besteht aus einer um den Punkt A drehbar gelagerten Stufenrolle (Radien r und R = 2r). Die Massenträgheitsmomente der beiden Stufen bezogen auf den
Aufgabe 1 (Seite 1 von 3) a) Das nebenstehende System besteht aus einer um den Punkt A drehbar gelagerten Stufenrolle (Radien r und R = 2r). Die Massenträgheitsmomente der beiden Stufen bezogen auf den
RatSLAM. Torben Becker. 24. Mai HAW Hamburg
 HAW Hamburg 24. Mai 2012 Gliederung 1 Motivation 2 3 Aussicht 2 / 21 Motivation Warum SLAM? Navigation Umgebungskartografie Feststellung der Position innerhalb eines Geländes ohne Funksignale Keine vorherige
HAW Hamburg 24. Mai 2012 Gliederung 1 Motivation 2 3 Aussicht 2 / 21 Motivation Warum SLAM? Navigation Umgebungskartografie Feststellung der Position innerhalb eines Geländes ohne Funksignale Keine vorherige
Autonomes Kreuzungsmanagement für Kraftfahrzeuge
 Autonomes Kreuzungsmanagement für Kraftfahrzeuge Trajektorienplanung mittels Dynamischer Programmierung Torsten Bruns, Ansgar Trächtler AUTOREG 2008 / Baden-Baden / 13.02.2008 Szenario Kreuzungsmanagement
Autonomes Kreuzungsmanagement für Kraftfahrzeuge Trajektorienplanung mittels Dynamischer Programmierung Torsten Bruns, Ansgar Trächtler AUTOREG 2008 / Baden-Baden / 13.02.2008 Szenario Kreuzungsmanagement
Arbeitsbereich Kognitive Robotik
 Arbeitsbereich Kognitive Robotik Bernd Krieg-Brückner, Thomas Röfer, Axel Lankenau, Rolf Müller Bremer Institut für Sichere Systeme Technologiezentrum Informatik Universität Bremen SPP Raumkognition Themen
Arbeitsbereich Kognitive Robotik Bernd Krieg-Brückner, Thomas Röfer, Axel Lankenau, Rolf Müller Bremer Institut für Sichere Systeme Technologiezentrum Informatik Universität Bremen SPP Raumkognition Themen
AUTONOMES KREISELSTABILISIERTES FAHRRAD
 AUTONOMES KREISELSTABILISIERTES FAHRRAD Adaption der Hardware Leistungselektronik Anordnung der Kreisel Messung der Radwinkel für Geschwindigkeitsregelung Optischer Aufputz System Adde Modellbildung Fahrrad
AUTONOMES KREISELSTABILISIERTES FAHRRAD Adaption der Hardware Leistungselektronik Anordnung der Kreisel Messung der Radwinkel für Geschwindigkeitsregelung Optischer Aufputz System Adde Modellbildung Fahrrad
Lehrangebot IuK-Projekt ab Sommersemester 2018
 Lehrangebot IuK-Projekt ab Sommersemester 2018 Bachelorstudiengang Informations- und Kommunikationstechnik Prof. Jörg Thiem http://www.fh-dortmund.de/thiem mailto:joerg.thiem@fh-dortmund.de Organisatorisches
Lehrangebot IuK-Projekt ab Sommersemester 2018 Bachelorstudiengang Informations- und Kommunikationstechnik Prof. Jörg Thiem http://www.fh-dortmund.de/thiem mailto:joerg.thiem@fh-dortmund.de Organisatorisches
Vertiefungsrichtung Mechatronik
 Was? Wer? Maschinenbau und Verfahrenstechnik Vertiefungsrichtung Mechatronik Wie? Was kommt dann? Institut für Mechatronik und Systemdynamik Prof. Dr.-Ing. A. Kecskemethy Prof. Dr.-Ing. W. Kowalczyk Prof.
Was? Wer? Maschinenbau und Verfahrenstechnik Vertiefungsrichtung Mechatronik Wie? Was kommt dann? Institut für Mechatronik und Systemdynamik Prof. Dr.-Ing. A. Kecskemethy Prof. Dr.-Ing. W. Kowalczyk Prof.
School of Engineering Institut für Mechatronische Systeme (IMS)
") School of Engineering Institut für Mechatronische Systeme (IMS) Zürcher Fachhochschule www.ims.zhaw.ch Forschung & Entwicklung Institut für Mechatronische Systeme (IMS) Mechatronik bringt die Disziplinen
School of Engineering Institut für Mechatronische Systeme (IMS) Zürcher Fachhochschule www.ims.zhaw.ch Forschung & Entwicklung Institut für Mechatronische Systeme (IMS) Mechatronik bringt die Disziplinen
Wohin fahren sie denn? Erfassung von Verkehrsteilnehmern und ihrer Interaktion an urbanen Straßenkreuzungen
 DLR.de Folie 1 Wohin fahren sie denn? Erfassung von Verkehrsteilnehmern und ihrer Interaktion an urbanen Straßenkreuzungen Dr.-Ing. Marek Junghans DLR.de Folie 2 Inhalt Motivation Objekterkennung, -klassifizierung
DLR.de Folie 1 Wohin fahren sie denn? Erfassung von Verkehrsteilnehmern und ihrer Interaktion an urbanen Straßenkreuzungen Dr.-Ing. Marek Junghans DLR.de Folie 2 Inhalt Motivation Objekterkennung, -klassifizierung
UPNS4D+: Selektive Gewinnung geringhaltiger Lagerstätten durch Untertagerobotik
 UPNS4D+: Selektive Gewinnung geringhaltiger Lagerstätten durch Untertagerobotik Dr. Matthias Rabel, indurad GmbH Koordinator: Dr. Reik Winkel, indurad GmbH Förderkennzeichen: 033R126A Verbundpartner XGraphic
UPNS4D+: Selektive Gewinnung geringhaltiger Lagerstätten durch Untertagerobotik Dr. Matthias Rabel, indurad GmbH Koordinator: Dr. Reik Winkel, indurad GmbH Förderkennzeichen: 033R126A Verbundpartner XGraphic
AGRO NAV. - das System
 AGRO NAV - das System - die Bausteine Besser landwirtschaften mit AGRO NAV Ziel AGRO NAV Das hochpräzise Regelsystem zur autonomen Fahrzeugführung und Gerätesteuerung in der Landwirtschaft AGRO NAV PLAN
AGRO NAV - das System - die Bausteine Besser landwirtschaften mit AGRO NAV Ziel AGRO NAV Das hochpräzise Regelsystem zur autonomen Fahrzeugführung und Gerätesteuerung in der Landwirtschaft AGRO NAV PLAN
1.2 Räumliche Bewegung. Aufgaben
 Technische Mechanik 3 1.2-1 Prof. Dr. Wandinger Aufgabe 1 1.2 Räumliche Bewegung Aufgaben Ein Flugzeug fliegt mit der Geschwindigkeit v F gegenüber der Luft einen angezeigten Kurs von 30. Der Wind weht
Technische Mechanik 3 1.2-1 Prof. Dr. Wandinger Aufgabe 1 1.2 Räumliche Bewegung Aufgaben Ein Flugzeug fliegt mit der Geschwindigkeit v F gegenüber der Luft einen angezeigten Kurs von 30. Der Wind weht
Ein autonomer mobiler Roboter mit elektronischer Nase
 Ein autonomer mobiler Roboter mit elektronischer Nase Achim Lilienthal Universität Tübingen WSI für Informatik, Lehrstuhl Rechnerarchitektur http://www-ra.informatik.uni-tuebingen.de Inhalt 1. Denkbare
Ein autonomer mobiler Roboter mit elektronischer Nase Achim Lilienthal Universität Tübingen WSI für Informatik, Lehrstuhl Rechnerarchitektur http://www-ra.informatik.uni-tuebingen.de Inhalt 1. Denkbare
Master Automotive Systems
 Master Automotive Systems Prof. Dr.-Ing. Clemens Gühmann Technische Universität Berlin School IV Electrical Engineering and Computer Science Departement of Energy and Automation Technology Überblick Motivation
Master Automotive Systems Prof. Dr.-Ing. Clemens Gühmann Technische Universität Berlin School IV Electrical Engineering and Computer Science Departement of Energy and Automation Technology Überblick Motivation
Bremsweg von PKW und Geländewagen
 BspNr: E0012 Ziele Interpretation der Koeffizienten einer quadratischen Funktion Veranschaulichung des Begriffes mit Hilfe physikalischer Anwendungen Analoge Aufgabenstellungen Übungsbeispiele Lehrplanbezug
BspNr: E0012 Ziele Interpretation der Koeffizienten einer quadratischen Funktion Veranschaulichung des Begriffes mit Hilfe physikalischer Anwendungen Analoge Aufgabenstellungen Übungsbeispiele Lehrplanbezug
ASB TECHNOLOGIE. With You
 ASB TECHNOLOGIE www.ntn-snr.com NTN-SNR, DER ASB -ERFINDER Das ASB -Lager wurde von NTN-SNR auf der Equip Auto in Paris anlässlich des großen Innovationspreises im Jahre 1997 vorgestellt. Dort wurde es
ASB TECHNOLOGIE www.ntn-snr.com NTN-SNR, DER ASB -ERFINDER Das ASB -Lager wurde von NTN-SNR auf der Equip Auto in Paris anlässlich des großen Innovationspreises im Jahre 1997 vorgestellt. Dort wurde es
Lösung II Veröffentlicht:
 1 Momentane Bewegung I Die Position eines Teilchens auf der x-achse, ist gegeben durch x = 3m 30(m/s)t + 2(m/s 3 )t 3, wobei x in Metern und t in Sekunden angeben wird (a) Die Position des Teilchens bei
1 Momentane Bewegung I Die Position eines Teilchens auf der x-achse, ist gegeben durch x = 3m 30(m/s)t + 2(m/s 3 )t 3, wobei x in Metern und t in Sekunden angeben wird (a) Die Position des Teilchens bei
Kraftfahrzeugmechatronik
 Spezialisierungsrichtung Kraftfahrzeugmechatronik angeboten durch das Institut für Antriebs- und Fahrzeugtechnik 17.09.2013, 1 Zusammensetzung IAF Institut für Antriebs- und Fahrzeugsystemtechnik Fahrzeugsysteme
Spezialisierungsrichtung Kraftfahrzeugmechatronik angeboten durch das Institut für Antriebs- und Fahrzeugtechnik 17.09.2013, 1 Zusammensetzung IAF Institut für Antriebs- und Fahrzeugsystemtechnik Fahrzeugsysteme
Fahrzeug-Mechatronik I
 Fahrzeug-Mechatronik I Dieter Ammon / 24.10.2013 1 Vorlesungsinhalt 0. Einführung: Mechatronik in der Fahrzeugtechnik 1. Fahrzeugregelungssysteme 1.1 Brems- und Traktionsregelungen (ABS, ASR, autom. Sperren)
Fahrzeug-Mechatronik I Dieter Ammon / 24.10.2013 1 Vorlesungsinhalt 0. Einführung: Mechatronik in der Fahrzeugtechnik 1. Fahrzeugregelungssysteme 1.1 Brems- und Traktionsregelungen (ABS, ASR, autom. Sperren)
Ultimate Team. RoboCup Weltmeister Sponsorenmappe
 Ultimate Team RoboCup Weltmeister 2016 Sponsorenmappe ÜBER UNS Wir sind ein Team aus sechs Technik interessierten Schülern der 9. Klasse des Gymnasiums/Realschule Illertissen und unsere Leidenschaft ist
Ultimate Team RoboCup Weltmeister 2016 Sponsorenmappe ÜBER UNS Wir sind ein Team aus sechs Technik interessierten Schülern der 9. Klasse des Gymnasiums/Realschule Illertissen und unsere Leidenschaft ist
Identifikation von Reifen- und Fahrzeugparametern für Grundsatzuntersuchungen von Fahrkomfort und Fahrdynamik
 Identifikation von Reifen- und Fahrzeugparametern für Grundsatzuntersuchungen von Fahrkomfort und Fahrdynamik Technische Universität Graz Institut für Fahrzeugtechnik Vortragender: Hackl Andreas Mitwirkende:
Identifikation von Reifen- und Fahrzeugparametern für Grundsatzuntersuchungen von Fahrkomfort und Fahrdynamik Technische Universität Graz Institut für Fahrzeugtechnik Vortragender: Hackl Andreas Mitwirkende:
DYMOLA Informationstag TU Wien,
 DYMOLA Informationstag TU Wien, 17.11.2005 Dipl.-Ing. Anton Haumer www.haumer.at Technisches Büro für Elektrotechnik Elektrische Antriebstechnik Ein Beispiel aus der Leistungselektronik mit DYMOLA: Simulation
DYMOLA Informationstag TU Wien, 17.11.2005 Dipl.-Ing. Anton Haumer www.haumer.at Technisches Büro für Elektrotechnik Elektrische Antriebstechnik Ein Beispiel aus der Leistungselektronik mit DYMOLA: Simulation
Bewegungssteuerung durch geregelte elektrische Antriebe Übung & Praktikum
 Bewegungssteuerung durch geregelte elektrische Antriebe Übung & Praktikum Thomas Huber Lehrstuhl für Elektrische Antriebssysteme und Leistungselektronik 1. Übung (09.11.2017) thomas.huber-haw-landshut@tum.de
Bewegungssteuerung durch geregelte elektrische Antriebe Übung & Praktikum Thomas Huber Lehrstuhl für Elektrische Antriebssysteme und Leistungselektronik 1. Übung (09.11.2017) thomas.huber-haw-landshut@tum.de
E-Motorsimulation. Basierend auf FPGA-Technologie Franz Dengler/Georg Selzle, MicroNova. 8. Technologietag Automotive
 E-Motorsimulation Basierend auf FPGA-Technologie Franz Dengler/Georg Selzle, MicroNova Überblick Warum Elektrofahrzeuge Komponenten eines Elektrofahrzeugs Testalternativen für Steuergeräte für Elektromotoren
E-Motorsimulation Basierend auf FPGA-Technologie Franz Dengler/Georg Selzle, MicroNova Überblick Warum Elektrofahrzeuge Komponenten eines Elektrofahrzeugs Testalternativen für Steuergeräte für Elektromotoren
Ingenieur Maschinenbau (m/w)
") Ingenieur Maschinenbau (m/w) Als Maschinenbauingenieur in unserem Team bist Du verantwortlich für das mechanische Design von einzigartigen Automatisierungslösungen während Du gleichzeitig den Produkt-Design
Ingenieur Maschinenbau (m/w) Als Maschinenbauingenieur in unserem Team bist Du verantwortlich für das mechanische Design von einzigartigen Automatisierungslösungen während Du gleichzeitig den Produkt-Design
Modellgestützte Online-Programmierverfahren für Industrieroboter
 Modellgestützte Online-Programmierverfahren für Industrieroboter 40. Sitzung des FA 4.13 Steuerung und Regelung von Robotern Universität Karlsruhe(TH) Institut für Prozessrechentechnik,Automation und Robotik
Modellgestützte Online-Programmierverfahren für Industrieroboter 40. Sitzung des FA 4.13 Steuerung und Regelung von Robotern Universität Karlsruhe(TH) Institut für Prozessrechentechnik,Automation und Robotik
Neues Verfahren zur Roboterzielführung ohne Kalibrierung
 Lernende Roboterführung Roboteraugen werden autonomer, leistungsfähiger und genauer Neues Verfahren zur Roboterzielführung ohne Kalibrierung Unter dem Namen AURA (Adaptive Uncalibrated Robot Automation)
Lernende Roboterführung Roboteraugen werden autonomer, leistungsfähiger und genauer Neues Verfahren zur Roboterzielführung ohne Kalibrierung Unter dem Namen AURA (Adaptive Uncalibrated Robot Automation)
GIS-basierte topologische Fahrzeuglokalisierung durch LIDAR Kreuzungserkennung
 durch LIDAR Kreuzungserkennung André Müller, Hans-Joachim Wünsche Fakultät für Luft- und Raumfahrttechnik Institut für Technik Autonomer Systeme (TAS) Universität der Bundeswehr München Inhalt - Einleitung
durch LIDAR Kreuzungserkennung André Müller, Hans-Joachim Wünsche Fakultät für Luft- und Raumfahrttechnik Institut für Technik Autonomer Systeme (TAS) Universität der Bundeswehr München Inhalt - Einleitung
Echtzeitmodellierung und Simulation von Elektrofahrzeugen
 Echtzeitmodellierung und Simulation von Elektrofahrzeugen Aufbau eines Demonstrators mit NI VeriStand und SimulationX zur Abbildung eines elektrisch betriebenen Allrad-Buggy Torsten Blochwitz, Jens Schindler
Echtzeitmodellierung und Simulation von Elektrofahrzeugen Aufbau eines Demonstrators mit NI VeriStand und SimulationX zur Abbildung eines elektrisch betriebenen Allrad-Buggy Torsten Blochwitz, Jens Schindler
Projektgruppe DynOLog. Informatik 7 & 12 sowie IRPA und IML Frank Weichert. Pascal Libuschewski. Adrian Schyja. Andreas Kamagaew
 Projektgruppe DynOLog Dynamische Detektion von Objekten im Kontext von logistischen Anwendungsfällen Informatik 7 & 12 sowie IRPA und IML Frank Weichert Email: frank.weichert@tu-dortmund.de Pascal Libuschewski
Projektgruppe DynOLog Dynamische Detektion von Objekten im Kontext von logistischen Anwendungsfällen Informatik 7 & 12 sowie IRPA und IML Frank Weichert Email: frank.weichert@tu-dortmund.de Pascal Libuschewski
Gliederung. ƒ Einleitung. ƒ Konzept. ƒ Realisierung. ƒ Zusammenfassung. Studienarbeit, Sommersemester Betreuer:
 9LVXHOOH0HWD.RPSRQHQWHQ Studienarbeit, Sommersemester 2000 YRUJHOHJWYRQ 'DQLHO)$EDZL Betreuer: Dipl.-Inform. Ralf Dörner Dipl.-Inform. Paul Grimm 7HFKQLVFKH8QLYHUVLWlW'DUPVWDGW Gliederung ƒ Einleitung
9LVXHOOH0HWD.RPSRQHQWHQ Studienarbeit, Sommersemester 2000 YRUJHOHJWYRQ 'DQLHO)$EDZL Betreuer: Dipl.-Inform. Ralf Dörner Dipl.-Inform. Paul Grimm 7HFKQLVFKH8QLYHUVLWlW'DUPVWDGW Gliederung ƒ Einleitung
1.2 Räumliche Bewegung. Aufgaben
 Technische Mechanik 3 1.-1 Prof. Dr. Wandinger Aufgabe 1 1. Räumliche Bewegung Aufgaben Ein Flugzeug fliegt mit der Geschwindigkeit v F gegenüber der Luft einen angezeigten Kurs von 30. Der Wind weht mit
Technische Mechanik 3 1.-1 Prof. Dr. Wandinger Aufgabe 1 1. Räumliche Bewegung Aufgaben Ein Flugzeug fliegt mit der Geschwindigkeit v F gegenüber der Luft einen angezeigten Kurs von 30. Der Wind weht mit
Vertiefungsrichtung Mechatronik
 Was? Wer? Maschinenbau und Verfahrenstechnik Vertiefungsrichtung Mechatronik Wie? Was kommt dann? Institut für Mechatronik und Systemdynamik Prof. Dr.-Ing. A. Kecskeméthy Prof. Dr.-Ing. W. Kowalczyk Prof.
Was? Wer? Maschinenbau und Verfahrenstechnik Vertiefungsrichtung Mechatronik Wie? Was kommt dann? Institut für Mechatronik und Systemdynamik Prof. Dr.-Ing. A. Kecskeméthy Prof. Dr.-Ing. W. Kowalczyk Prof.
Konzeption einer Architektur für ein Werkzeug zur Verkehrssimulation unter Berücksichtigung von Fahrerassistenzsystemen
 Konzeption einer Architektur für ein Werkzeug zur Verkehrssimulation unter Berücksichtigung von Fahrerassistenzsystemen Diplomarbeitsvortrag Oliver Betreuer: Prof. Dr.-Ing. K. Böhm Betreuender Mitarbeiter:
Konzeption einer Architektur für ein Werkzeug zur Verkehrssimulation unter Berücksichtigung von Fahrerassistenzsystemen Diplomarbeitsvortrag Oliver Betreuer: Prof. Dr.-Ing. K. Böhm Betreuender Mitarbeiter:
JetMove D203 Versions-Update von V2.13 auf V2.14
 JetMove D203 Versions-Update von V2.13 auf V2.14 Auflage 1.00 11.06.2012/ Printed in Germany Versions-Update von V2.13 auf V2.14 JetMove D203 11.06.2012 Die Firma JETTER AG behält sich das Recht vor, Änderungen
JetMove D203 Versions-Update von V2.13 auf V2.14 Auflage 1.00 11.06.2012/ Printed in Germany Versions-Update von V2.13 auf V2.14 JetMove D203 11.06.2012 Die Firma JETTER AG behält sich das Recht vor, Änderungen
Monitoringdes Hygienezustands von Rohrleitungssystemen durch Echtzeit-Farbanalyse
 Monitoringdes Hygienezustands von Rohrleitungssystemen durch Echtzeit-Farbanalyse Ing. Martin Handler BEKO Engineering & Informatik AG / Graz Mag. Christian Thonhauser Dipl. Ing. Thonhauser GesmbH/ Perchtoldsdorf
Monitoringdes Hygienezustands von Rohrleitungssystemen durch Echtzeit-Farbanalyse Ing. Martin Handler BEKO Engineering & Informatik AG / Graz Mag. Christian Thonhauser Dipl. Ing. Thonhauser GesmbH/ Perchtoldsdorf
ROBOTERWERK. Mobile Outdoor Roboter-Plattform FORBOT A4. FORBOT A4 - S FORBOT A4 - Logo! FORBOT A4 - Mechatronik
 Mobile Outdoor Roboter-Plattform FORBOT A4 In drei Varianten: FORBOT A4 - S7 1200 FORBOT A4 - Logo! FORBOT A4 - Mechatronik Besuchen Sie uns auf der Didacta! Halle 5.2 Gang B Stand 23 Outdoor Roboter-Plattform
Mobile Outdoor Roboter-Plattform FORBOT A4 In drei Varianten: FORBOT A4 - S7 1200 FORBOT A4 - Logo! FORBOT A4 - Mechatronik Besuchen Sie uns auf der Didacta! Halle 5.2 Gang B Stand 23 Outdoor Roboter-Plattform
Statistiken. Features
 Bild 5.6_1 Statistiken 2001 waren 17 % der Unfälle in Deutschland Auffahrunfälle mit dem vorausfahrenden Fahrzeug (Quelle: Statistisches Bundesamt) Eine Studie stellte eine um 40 % gesteigerte Reaktionsfähigkeit
Bild 5.6_1 Statistiken 2001 waren 17 % der Unfälle in Deutschland Auffahrunfälle mit dem vorausfahrenden Fahrzeug (Quelle: Statistisches Bundesamt) Eine Studie stellte eine um 40 % gesteigerte Reaktionsfähigkeit
Deflektometrie Ein Messverfahren für spiegelnde Oberflächen
 Deflektometrie Ein Messverfahren für spiegelnde Oberflächen Dr. Alexander Zimmermann FORWISS Universität Passau Institut für Softwaresysteme in technischen Anwendungen der Informatik 19. Oktober 2017 Gliederung
Deflektometrie Ein Messverfahren für spiegelnde Oberflächen Dr. Alexander Zimmermann FORWISS Universität Passau Institut für Softwaresysteme in technischen Anwendungen der Informatik 19. Oktober 2017 Gliederung
Validierung der Umfelderkennung für hochautomatisiertes Fahren
 Validierung der Umfelderkennung für hochautomatisiertes Fahren VIRTUAL VEHICLE Research Center Dr. Christian Schwarzl Head of Dependable Systems Group Virtual Vehicle Virtual Vehicle Forschungszentrum
Validierung der Umfelderkennung für hochautomatisiertes Fahren VIRTUAL VEHICLE Research Center Dr. Christian Schwarzl Head of Dependable Systems Group Virtual Vehicle Virtual Vehicle Forschungszentrum
Modell-Programmierte Roboter Regelung. Univ.-Prof. Dr. Michael Hofbaur Institut für Automatisierungs- und Regelungstechnik, UMIT, Hall i.
 Modell-Programmierte Roboter Regelung Univ.-Prof. Dr. Michael Hofbaur Institut für Automatisierungs- und Regelungstechnik, UMIT, Hall i. Tirol Motivation: Automatisierung komplexer Systeme komplexe technische
Modell-Programmierte Roboter Regelung Univ.-Prof. Dr. Michael Hofbaur Institut für Automatisierungs- und Regelungstechnik, UMIT, Hall i. Tirol Motivation: Automatisierung komplexer Systeme komplexe technische
Modellbasierte Simula0on und experimentelle Anwendung von mechatronischen Systemen in der Lehre mit MATLAB, Simulink und Raspberry Pi.
 Modellbasierte Simula0on und experimentelle Anwendung von mechatronischen Systemen in der Lehre mit MATLAB, Simulink und Raspberry Pi. Dipl.- Ing., M.Sc. Jochen Theis Fachbereich LuO- und RaumfahrRechnik
Modellbasierte Simula0on und experimentelle Anwendung von mechatronischen Systemen in der Lehre mit MATLAB, Simulink und Raspberry Pi. Dipl.- Ing., M.Sc. Jochen Theis Fachbereich LuO- und RaumfahrRechnik
Reaktive und Hybride Agenten
 Reaktive und Hybride Agenten Seminar: Agentensysteme SS10 Jens Wittrowski (jens.wittrowski@uni-bielefeld.de) Einleitung / Motivation Probleme mit Agenten, welche eine symbolische / logische Repräsentation
Reaktive und Hybride Agenten Seminar: Agentensysteme SS10 Jens Wittrowski (jens.wittrowski@uni-bielefeld.de) Einleitung / Motivation Probleme mit Agenten, welche eine symbolische / logische Repräsentation
Softwarepraktikum Teamrobotik SS 2007 Abschlusspräsentation
 Inhalt des Vortrags Softwarepraktikum Teamrobotik SS 27 Abschlusspräsentation von Norman Siemer, Thomas Poltrock und Martin Schemmer Einleitung Aufgabenstellung: Kollisionsfreie Navigation durch einen
Inhalt des Vortrags Softwarepraktikum Teamrobotik SS 27 Abschlusspräsentation von Norman Siemer, Thomas Poltrock und Martin Schemmer Einleitung Aufgabenstellung: Kollisionsfreie Navigation durch einen
Entwicklung eines FPGA basierten Distributed Computing System. Frank Opitz INF-M3 Seminar - Wintersemester 2010/11 26.
 Entwicklung eines FPGA basierten Distributed Computing System INF-M3 Seminar - Wintersemester 2010/11 26. November 2010 Inhalt Motivation Dynamische Partielle Rekonfiguration Distributed Computing Zielsetzung
Entwicklung eines FPGA basierten Distributed Computing System INF-M3 Seminar - Wintersemester 2010/11 26. November 2010 Inhalt Motivation Dynamische Partielle Rekonfiguration Distributed Computing Zielsetzung
MOVE IT FOR TOMORROW. torsten.torwegge.de
 MOVE IT FOR TOMORROW torsten.torwegge.de belastbar // Daten und Fakten flexibel zuverlässig autonom remote stark 190er 300er* 190er 300er* hilfsbereit vorausschauend Länge 1.285 mm ca. 2.500 mm 1.285 mm
MOVE IT FOR TOMORROW torsten.torwegge.de belastbar // Daten und Fakten flexibel zuverlässig autonom remote stark 190er 300er* 190er 300er* hilfsbereit vorausschauend Länge 1.285 mm ca. 2.500 mm 1.285 mm
Leistung dokumentieren
 Leistung dokumentieren Was bringt Ihnen die TraceMate-Box? Mit der web-basierten TraceMate Software behalten Sie stets den Überblick über Ihre Fahrzeugflotte. Sie sehen auf einen Blick in der Karte, wo
Leistung dokumentieren Was bringt Ihnen die TraceMate-Box? Mit der web-basierten TraceMate Software behalten Sie stets den Überblick über Ihre Fahrzeugflotte. Sie sehen auf einen Blick in der Karte, wo
WA Sensor LKW CCD Achsmessgerät. Bernhard Hoffmann Business Unit Manager Wheel Service. 27. November Die NUSSBAUM Gruppe
 WA 970-8 Sensor LKW CCD Achsmessgerät Bernhard Hoffmann Business Unit Manager Wheel Service 27. November 2013 1 Die NUSSBAUM Gruppe Wichtigste Parameter der Achsvermessung Spur / Gesamtspur Winkel zwischen
WA 970-8 Sensor LKW CCD Achsmessgerät Bernhard Hoffmann Business Unit Manager Wheel Service 27. November 2013 1 Die NUSSBAUM Gruppe Wichtigste Parameter der Achsvermessung Spur / Gesamtspur Winkel zwischen
Regelung eines inversen Pendels
 Regelung eines inversen Pendels Dr.-Ing. Michael Buchholz 29.10.2010 Institut für Mess-, Regel- und Mikrotechnik NI Dozenten- und Ausbildertag 2010 Fürstenfeldbruck Seite 2 Anwendungsgebiete in der Forschung
Regelung eines inversen Pendels Dr.-Ing. Michael Buchholz 29.10.2010 Institut für Mess-, Regel- und Mikrotechnik NI Dozenten- und Ausbildertag 2010 Fürstenfeldbruck Seite 2 Anwendungsgebiete in der Forschung
Elektrische Antriebe und Leistungselektronik für Bachelor und Master
 der Elektrischen Energietechnik für Bachelor und Master Informationen für Studenten Elektrotechnisches Institut der Universität Karlsruhe Stand Januar 2009 Elektrische Energietechnik Die Elektrische Energietechnik
der Elektrischen Energietechnik für Bachelor und Master Informationen für Studenten Elektrotechnisches Institut der Universität Karlsruhe Stand Januar 2009 Elektrische Energietechnik Die Elektrische Energietechnik