Griff in die Kiste mit V60: Realisiert im Automobil-Rohbau
|
|
|
- Johannes Stein
- vor 6 Jahren
- Abrufe
Transkript
1 Griff in die Kiste mit V60: Realisiert im Automobil-Rohbau 1. Kurzportrait VisionTools 2. Was ist Griff in die Kiste, was nicht? (Komplexitätsstufen) 3. Szenarien 4. Lösungen: Höhenbild vs. Grauwertbild Grauwertbilder: Stereo vs. Quasistereo 5. V60 Objektphilosophie für Griff in die Kiste (Grauwertbilder) 6. Beispiele aus dem Karosserie-Rohbau
 Entwicklung und Weiterentwicklung der V60- Bildverarbeitungssoftware,")
2 Portrait VisionTools Gründung Niederlassungen in München und Stuttgart Leistungen: a) Entwicklung und Weiterentwicklung der V60- Bildverarbeitungssoftware, frei vertrieben b) Projekte auf V60 Basis Vorversuche Planung Hardware Inbetriebnahme Schulung
3 Portrait VisionTools
")
4 V60: Das Arbeitspferd der industriellen Bildverarbeitung Eigene, fortgeschrittene 2D- und 3D-Auswertemethoden Offenes System. Frei konfigurierbar, von der einfachsten Aufgabe bis zum komplexen Großprojekt Vielfalt Schnittstellen (Kameras, Feldbusse )




5 V60 läuft auf allen PC-basierten Systemen V60 SlyCam V60 Mini PC SlyBox III TP15 Ethernet HMI (OP 12)



6 V60 Anwendungen Vollständigkeitskontrolle Typunterscheidung Teilevermessung Teilelokalisierung Oberflächenkontrolle Schriftzeichenerkennung Data-Matrix-Code lesen Roboterführung
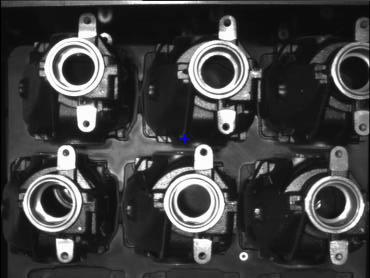
7 Komplexitätsstufen Globale Lageerkennung (3D, 1 Werkstück)? Griff in die Kiste: - 6 Freiheitsgrade (Position x,y,z, Winkel a,b,c) - Zuordnung der Bildmerkmale zu Objektmerkmalen mehrdeutig

8 Szenarien Globale Lageerkennung Beispiel globale Lageerkennung: 3D-Bauteilentnahme aus Sonderbehältern Messpunkte


9 Szenarien Herunterbrechen auf Höhenmessung + 2D (3 Freiheitsgrade)


10 Szenarien Anlieferung auf Holzpaletten Anlieferung ohne Palette Realisiert über Höhenbild via Laser Laufzeit
11 Szenarien
12 A) Herunterbrechen in Höhenmessung und 2D- Lageerkennung B) 3D (6 Freiheitsgrade) - Stereo Lösungen (Grauwertbilder) - Quasi-Stereo
13 Lösungen (Grauwertbilder): Herunterbrechen Herunterbrechen in Höhenmessung und 2D-Lageerkennung: 1. Höhenbestimmung über Größe, z.b. Größe der Formfolie 2. 2D-Lagebestimmung in Ebene Kamera fix oder Roboter-montiert Höhe aus Größe der Abbildung (Werkstück oder Folie) berechnet. 2D-Lage in vorab bestimmter Höhe messen
14 Lösungen: (Grauwertbilder): B) Stereo Stereo
15 Lösungen (Grauwertbilder): Quasi-Stereo Mono-3D >= 3 Merkmale, aus unterschiedlicher Richtung, mit mehreren Kameras oder - aus geringer Entfernung mit eine Kamera ( Mono-3D )

16 Lösungen (Grauwertbilder): Quasi-Stereo Beispiel Messpunkte >= 3 Merkmale, aus unterschiedlicher Richtung Zuordnung zu Bildmerkmalen bekannt Merkmalsgeometrie bekannt, aus CAD oder Vermessung oder durch Vorzeigen
17 V60-Objektphilosophie für Griff in die Kiste Griff in die Kiste mit VisionTools V60: Wenige, frei kombinierbare Objekte, die alle Szenarien abdecken.
18 V60-Objektphilosophie für Griff in die Kiste Aufgabe: Definition von wenigen, frei kombinierbaren Objekte, die alle Szenarien abdecken. z.b. Standardfall Stereo mit Festkameras
19 V60-Objektphilosophie für Griff in die Kiste Aufgabe: Definition von wenigen, frei kombinierbaren Objekte, die alle Szenarien abdecken. z.b. Stereo mit einer robotergeführten Kamera
20 V60-Objektphilosophie für Griff in die Kiste Aufgabe: Definition von wenigen, frei kombinierbaren Objekte, die alle Szenarien abdecken. z.b. Robotergeführte Mono-3D-Kamera
21 V60-Objektphilosophie für Griff in die Kiste Aufgabe: Definition von wenigen, frei kombinierbaren Objekte, die alle Szenarien abdecken. z.b. Robotergeführte Mono-3D-Kamera + fest montiert Globalkamera
22 V60-Objektphilosophie für Griff in die Kiste Aufgabe: Definition von wenigen, frei kombinierbaren Objekte, die alle Szenarien abdecken. z.b. Mehrere fest montierte Kameras für Quasi-Stereo
23 V60-Objektphilosophie für Griff in die Kiste Systemkonfiguration mittels Objekt Koordinatensystem Ein wildes Beispiel TCP (Mono-3D)? Merkmale Werkstück Palette Kamera Merkmal Kalibrierung Vom Roboter Vom Wagen TCP in Roboterkoord. Wagen Welt Werkstück Palette Werkstück- Modell Aus momentan globaler Werkstücklage und momentanen Palettenkoordinaten Vom Transportsystem
24 V60-Objektphilosophie für Griff in die Kiste Vorbemerkung: Was ist Kamerakalibrierung? x,y,z? u,v Nach Kalibrieren können aus Weltkoordinaten Bildkoordinaten berechnet werden. Aus Bildkoordinaten kann umgekehrt nur der Sehstrahl berechnet werden.
25 V60-Objektphilosophie für Griff in die Kiste Objekt Kamerakalibrierung unbekannt unbekannt TCP TCP TCP unbekannt unbekannt unbekannt bekannt bekannt Kalibriermarken, Bezug zu Roboter durch Abtasten der Marken oder des Kalibrierrahmens Marke oder Serienteil gegen Kamera bewegt Kamera gegen Marke oder Serienteil bewegt
26 V60-Objektphilosophie für Griff in die Kiste x/y/z??? Modell: Objekt Merkmalsliste Einlernen des Werkstücks: Vorzeigen in verschiedenen Relativlagen (Werkstück oder Kamera bewegt).
27 V60-Objektphilosophie für Griff in die Kiste Standard-Greifpose Objekt Koordinatensystem In zufälliger Lage - Lageerkennung - dazugehörige Greifpose abspeichern
 einpassen Objekt Matching Stereo 5")
28 V60-Objektphilosophie für Griff in die Kiste Modellmerkmale in Szenenmerkmale (Daten wolke ) einpassen Objekt Matching Stereo 5 Kameras

29 Beispiele aus dem Rohbau

30 Beispiel aus dem Rohbau

31 Beispiel aus dem Rohbau Kalibrierkreuz



32 Beispiel aus dem Rohbau In Serie Im Labor erprobt
33 V60-Objektphilosophie für Griff in die Kiste Zusammenfassung der Einzelschritte 1) Konfiguration festlegen (Kameras wo montiert?) 2) Kamerakalibrierung (bevorzugt: Roboterbewegungen) Objekt Koordinatensystem Objekt Kamerakalibrierung 3) Modellbildung: Einlernen der Werkstückgeometrie - (Handeingabe, CAD ) - Vorzeigen in verschiedenen Lagen (Relativposen bekannt) Objekt Merkmalsliste 4) Einteachen der Standard-Greifpose durch Vorzeigen Objekt Koordinatensystem 5) Erkennen: Modell in Daten wolke einpassen (matchen) Objekt: Matching
Farbpunkterkennung mit V60-Software
 Farbpunkterkennung mit V60-Software - Portrait Vision Tools: Leistungen; Anwendungen; SW - V60 Software Einführung - Objekte zur Farberkennung Eigenschaften - Farbpunkterkennung Grundsätzliches - Farbpunkterkennung
Farbpunkterkennung mit V60-Software - Portrait Vision Tools: Leistungen; Anwendungen; SW - V60 Software Einführung - Objekte zur Farberkennung Eigenschaften - Farbpunkterkennung Grundsätzliches - Farbpunkterkennung
Farberkennung mit V60-Software
 Farberkennung mit V60-Software - Portrait Vision Tools: Leistungen; Anwendungen; SW - V60 Software Einführung - Objekte zur Farberkennung Eigenschaften - Farbpunkterkennung Grundsätzliches - Farbpunkterkennung
Farberkennung mit V60-Software - Portrait Vision Tools: Leistungen; Anwendungen; SW - V60 Software Einführung - Objekte zur Farberkennung Eigenschaften - Farbpunkterkennung Grundsätzliches - Farbpunkterkennung
*DE B *
 (19) *DE102006005990B420130221* (10) DE 10 2006 005 990 B4 2013.02.21 (12) Patentschrift (21) Aktenzeichen: 10 2006 005 990.5 (22) Anmeldetag: 08.02.2006 (43) Offenlegungstag: 09.08.2007 (45) Veröffentlichungstag
(19) *DE102006005990B420130221* (10) DE 10 2006 005 990 B4 2013.02.21 (12) Patentschrift (21) Aktenzeichen: 10 2006 005 990.5 (22) Anmeldetag: 08.02.2006 (43) Offenlegungstag: 09.08.2007 (45) Veröffentlichungstag
2D, 3D Kameratechnik in der Robotik. Jan Fischer
 2D, 3D Kameratechnik in der Robotik Jan Fischer Agenda Firmeninformationen 1x1 der Bildverarbeitung Kompetenzen für erfolgreiches Pick & Place Anwendungsspektrum Kriterien die man bei Pick & Place beachten
2D, 3D Kameratechnik in der Robotik Jan Fischer Agenda Firmeninformationen 1x1 der Bildverarbeitung Kompetenzen für erfolgreiches Pick & Place Anwendungsspektrum Kriterien die man bei Pick & Place beachten
Komponenten- HIL und Fahrzeug- HIL sind heute weit verbreitet. i.w. höhere Qualität der Fahrzeuge und Steuergeräte
 HIL Aktueller Status ECU Validierung mit HIL Technologie Komponenten- HIL und Fahrzeug- HIL sind heute weit verbreitet fester Bestandteil im Fahrzeug- Entwicklungsprozess Wertschöpfung und Nutzen für den
HIL Aktueller Status ECU Validierung mit HIL Technologie Komponenten- HIL und Fahrzeug- HIL sind heute weit verbreitet fester Bestandteil im Fahrzeug- Entwicklungsprozess Wertschöpfung und Nutzen für den
High-End Bildverarbeitung ganz klein P400Mini
 High-End Bildverarbeitung ganz klein P400Mini Inhalt Hardware Vorteile Hardwareüberblick Software Vorteile Prüfmöglichkeiten Spezielle Prüfverfahren Softwareschnittstelle Benutzerdefinierte Oberfläche
High-End Bildverarbeitung ganz klein P400Mini Inhalt Hardware Vorteile Hardwareüberblick Software Vorteile Prüfmöglichkeiten Spezielle Prüfverfahren Softwareschnittstelle Benutzerdefinierte Oberfläche
Inspect Application Forum. mvbluegemini & mvimpact Configuration Studio. Stefan Bertele MATRIX VISION
 Inspect Application Forum mvbluegemini & mvimpact Configuration Studio Stefan Bertele MATRIX VISION 1 Über MATRIX VISION Deutscher Bildverarbeitungspionier Sitz: Backnang bei Stuttgart Portfolio: Standardkameras
Inspect Application Forum mvbluegemini & mvimpact Configuration Studio Stefan Bertele MATRIX VISION 1 Über MATRIX VISION Deutscher Bildverarbeitungspionier Sitz: Backnang bei Stuttgart Portfolio: Standardkameras
Neues Verfahren zur Roboterzielführung ohne Kalibrierung
 Lernende Roboterführung Roboteraugen werden autonomer, leistungsfähiger und genauer Neues Verfahren zur Roboterzielführung ohne Kalibrierung Unter dem Namen AURA (Adaptive Uncalibrated Robot Automation)
Lernende Roboterführung Roboteraugen werden autonomer, leistungsfähiger und genauer Neues Verfahren zur Roboterzielführung ohne Kalibrierung Unter dem Namen AURA (Adaptive Uncalibrated Robot Automation)
Passagierbrücke. Einrollleitlinie. Rollfeld. Display. Videokamera. Stopposition B Computer Vision 1_Seite 1
 Beispiel Andocksstem (ADS) Sstemleistung: Leitung des Flugzeugpiloten mittels Displa auf die für den Flugzeugtp vorgeschriebene Stoppposition. Sensor für Bugradposition und Achsenwinkel eines anrollenden
Beispiel Andocksstem (ADS) Sstemleistung: Leitung des Flugzeugpiloten mittels Displa auf die für den Flugzeugtp vorgeschriebene Stoppposition. Sensor für Bugradposition und Achsenwinkel eines anrollenden
Machine Vision einfach zugänglich gemacht für jede Anwendung von 2D bis 6D
 Plug & Automate für die 3D Roboterführung Machine Vision einfach zugänglich gemacht für jede Anwendung von 2D bis 6D Wie lässt sich anspruchsvolle 3D Roboterführung schnell und einfach den Anwendern zur
Plug & Automate für die 3D Roboterführung Machine Vision einfach zugänglich gemacht für jede Anwendung von 2D bis 6D Wie lässt sich anspruchsvolle 3D Roboterführung schnell und einfach den Anwendern zur
Matsushita PC-Imagechecker P400
 Matsushita Electric Works Deutschland Matsushita PC-Imagechecker P400 Inhalt Inhalt: Hardware Leistungsmerkmale multifunktionale Kameraunterstützung höchste Geschwindigkeit Schnittstellen Software vielfältige
Matsushita Electric Works Deutschland Matsushita PC-Imagechecker P400 Inhalt Inhalt: Hardware Leistungsmerkmale multifunktionale Kameraunterstützung höchste Geschwindigkeit Schnittstellen Software vielfältige
Inbetriebnahme des EYECOM EasyVision an einem MOTOMAN Roboter
 Inbetriebnahme des EYECOM EasyVision an einem MOTOMAN Roboter Zur Inbetriebnahme des Kamerasystems EYECOM EasyVision sind folgende Schritte notwendig: 1. Montage der Kamera an den Roboter ( Kamera in Waage
Inbetriebnahme des EYECOM EasyVision an einem MOTOMAN Roboter Zur Inbetriebnahme des Kamerasystems EYECOM EasyVision sind folgende Schritte notwendig: 1. Montage der Kamera an den Roboter ( Kamera in Waage
Fitting 3D Models to Images
 Proseminar "Aufgabenstellungen der Bildanalyse und Mustererkennung" Fitting 3D Models to Images WS 08/09 Gliederung Einleitung Pose Consistency perspective Camera affine/projective Camera Linearkombinationen
Proseminar "Aufgabenstellungen der Bildanalyse und Mustererkennung" Fitting 3D Models to Images WS 08/09 Gliederung Einleitung Pose Consistency perspective Camera affine/projective Camera Linearkombinationen
Kamerakalibrierung. Messen in Videobildern, Leobots-Projekt Version 1.0. Matthias Jauernig, 03INB, HTWK Leipzig
 Kamerakalibrierung Messen in Videobildern, Leobots-Projekt 2006 Version 1.0 Matthias Jauernig, 03INB, HTWK Leipzig Copyright (c) 2006, Matthias Jauernig Kamerakalibrierung, Matthias Jauernig 3 Begriffe
Kamerakalibrierung Messen in Videobildern, Leobots-Projekt 2006 Version 1.0 Matthias Jauernig, 03INB, HTWK Leipzig Copyright (c) 2006, Matthias Jauernig Kamerakalibrierung, Matthias Jauernig 3 Begriffe
Mitgeführte Sensoren erhöhen die Flexibilität in der Fertigung
 Voll im Trend: Mobile Sensorik am Roboter Mitgeführte Sensoren erhöhen die Flexibilität in der Fertigung Die Bereitstellung von Zielkoordinaten für Roboter durch bildverarbeitende Sensorik, die eine in
Voll im Trend: Mobile Sensorik am Roboter Mitgeführte Sensoren erhöhen die Flexibilität in der Fertigung Die Bereitstellung von Zielkoordinaten für Roboter durch bildverarbeitende Sensorik, die eine in
Bildverarbeitungskontrolle bei großer Typenvielfalt
 VisionTools Bildanalyse Systeme GmbH Bildverarbeitungskontrolle bei großer Typenvielfalt Dr. Josef Pfeiffer www.vision-tools.com E-Mail: info@vision-tools.com Inhalt der Präsentation! Wer ist Vision Tools?!
VisionTools Bildanalyse Systeme GmbH Bildverarbeitungskontrolle bei großer Typenvielfalt Dr. Josef Pfeiffer www.vision-tools.com E-Mail: info@vision-tools.com Inhalt der Präsentation! Wer ist Vision Tools?!
Bildverarbeitung für die automatisierte Verpackungstechnik
 Bildverarbeitung für die automatisierte Verpackungstechnik Markus Hüttel 6. Juli 2011 Übersicht Unsere Arbeitsschwerpunkte - Thermographie - NIR-Spektroskopie - Texturanalyse - Fehlerdetektion - 3D Bild-
Bildverarbeitung für die automatisierte Verpackungstechnik Markus Hüttel 6. Juli 2011 Übersicht Unsere Arbeitsschwerpunkte - Thermographie - NIR-Spektroskopie - Texturanalyse - Fehlerdetektion - 3D Bild-
Prof. J. Zhang zhang@informatik.uni-hamburg.de. Universität Hamburg. AB Technische Aspekte Multimodaler Systeme. 16. Dezember 2003
 zhang@informatik.uni-hamburg.de Universität Hamburg AB Technische Aspekte Multimodaler Systeme zhang@informatik.uni-hamburg.de Inhaltsverzeichnis 5. Sichtsysteme in der Robotik....................307 Industrielle
zhang@informatik.uni-hamburg.de Universität Hamburg AB Technische Aspekte Multimodaler Systeme zhang@informatik.uni-hamburg.de Inhaltsverzeichnis 5. Sichtsysteme in der Robotik....................307 Industrielle
Bildverarbeitung zur Bewertung und Steuerung nachgelagerter Prozesse
 Bildverarbeitung zur Bewertung und Steuerung nachgelagerter Prozesse Domenic Foerderer M. Sc., ProNES Automation GmbH Matthias Hielscher B. Eng., MüKo Maschinenbau GmbH Agenda Vorstellung der Referenten
Bildverarbeitung zur Bewertung und Steuerung nachgelagerter Prozesse Domenic Foerderer M. Sc., ProNES Automation GmbH Matthias Hielscher B. Eng., MüKo Maschinenbau GmbH Agenda Vorstellung der Referenten
Grundlagen der optischen Geometrievermessung und deren Anwendungen
 Grundlagen der optischen Geometrievermessung und deren Anwendungen Christian Gerlach Innovationstag 2010 1 Gliederung: Grundlagen der Photogrammetrie Stand der Technik Industrielle Anwendungen der Photogrammetrie
Grundlagen der optischen Geometrievermessung und deren Anwendungen Christian Gerlach Innovationstag 2010 1 Gliederung: Grundlagen der Photogrammetrie Stand der Technik Industrielle Anwendungen der Photogrammetrie
Bildverarbeitung: 3D-Geometrie. D. Schlesinger () Bildverarbeitung: 3D-Geometrie 1 / 13
 Bildverarbeitung: 3D-Geometrie 1 / 13") Bildverarbeitung: 3D-Geometrie D. Schlesinger () Bildverarbeitung: 3D-Geometrie 1 / 13 Lochkamera Modell C Projektionszentrum, Optische Achse, Bildebene, P Hauptpunkt (optische Achse kreuzt die Bildebene),
Bildverarbeitung: 3D-Geometrie D. Schlesinger () Bildverarbeitung: 3D-Geometrie 1 / 13 Lochkamera Modell C Projektionszentrum, Optische Achse, Bildebene, P Hauptpunkt (optische Achse kreuzt die Bildebene),
Ein Structure and Motion Ansatz zur Umfeldrekonstruktion in komplexen Fahrzeugumgebungen
 Sicherheit durch Fahrerassistenz 2010 Ein Structure and Motion Ansatz zur Umfeldrekonstruktion in komplexen Fahrzeugumgebungen Wojciech Derendarz, Thorsten Graf Volkswagen AG Friedrich M. Wahl TU Braunschweig,
Sicherheit durch Fahrerassistenz 2010 Ein Structure and Motion Ansatz zur Umfeldrekonstruktion in komplexen Fahrzeugumgebungen Wojciech Derendarz, Thorsten Graf Volkswagen AG Friedrich M. Wahl TU Braunschweig,
EYEVISION. In drei Schritten zur Bildverarbeitungslösung!
 Messen Prüfen Kontrollieren Sortieren Positionieren Vollständigkeitskontrolle Vorhandenseinskontrolle Oberflächeninspektion Teileprüfung Werkzeugvoreinstellung 3D Sehen 3D Erkennung Robot Vision Markierungskontrolle
Messen Prüfen Kontrollieren Sortieren Positionieren Vollständigkeitskontrolle Vorhandenseinskontrolle Oberflächeninspektion Teileprüfung Werkzeugvoreinstellung 3D Sehen 3D Erkennung Robot Vision Markierungskontrolle
Qualitativ: Hier geht es um die Inhalte wie z.b. die Landnutzung Quantitativ: Hierbei geht es um das Messen von Koordinaten
 Grundlagen der Photogrammetrie Die Photogrammetrie ist ein Verfahren zur Vermessung von Objekten nach Lage und Form. Dabei werden die Messungen nicht direkt am Objekt, sondern indirekt auf Bildern des
Grundlagen der Photogrammetrie Die Photogrammetrie ist ein Verfahren zur Vermessung von Objekten nach Lage und Form. Dabei werden die Messungen nicht direkt am Objekt, sondern indirekt auf Bildern des
'Visual Hull' mit Hilfe von Spiegeln
 'Visual Hull' mit Hilfe von Spiegeln hwww.dip.ee.uct.ac.za/~kforbes/doublemirror/doublemirror.html Dreidimensionales Computersehen Dr.-Ing. Simon Winkelbach www.rob.cs.tu-bs.de/teaching/courses/cs 1 Zur
'Visual Hull' mit Hilfe von Spiegeln hwww.dip.ee.uct.ac.za/~kforbes/doublemirror/doublemirror.html Dreidimensionales Computersehen Dr.-Ing. Simon Winkelbach www.rob.cs.tu-bs.de/teaching/courses/cs 1 Zur
Inline µm genaues optisches Messen von Kolbenringen für reduzierten Treibstoff- und Ölverbrauch
 Inline µm genaues optisches Messen von Kolbenringen für reduzierten Treibstoff- und Ölverbrauch Horst Horvath OCTUM GmbH, 74360 Ilsfeld, Renntalstrasse 16, Tel:+49 (0) 7062 91 49 4-0 Unternehmen, Geschäftsfeld
Inline µm genaues optisches Messen von Kolbenringen für reduzierten Treibstoff- und Ölverbrauch Horst Horvath OCTUM GmbH, 74360 Ilsfeld, Renntalstrasse 16, Tel:+49 (0) 7062 91 49 4-0 Unternehmen, Geschäftsfeld
Übersicht. Befehlsbeschreibung der Vision Systeme
 Übersicht sbeschreibung der Vision Systeme sbeschreibung der Vision Systeme Seite 2 Vision & Control 2008 sbeschreibung der Vision Systeme 1. e Bildanalysebefehle Bildaufnahme Shutter Asynchron Blitzen
Übersicht sbeschreibung der Vision Systeme sbeschreibung der Vision Systeme Seite 2 Vision & Control 2008 sbeschreibung der Vision Systeme 1. e Bildanalysebefehle Bildaufnahme Shutter Asynchron Blitzen
 - - CodE 11 CodE 0 0 0 0 0 0 0 0 2.o C 1 10.0 C 2 off 3 3.0 4 2.0 5 off 6 1 8 20.0 9 60 C 7 4.0 10 80 C 1 38 C 12 8 k 13 on 14 30.0 15 10 16 - - CodE 11 CodE 0 0 0 0 0 0 0 0 2.o C 1 10.0 C 2
- - CodE 11 CodE 0 0 0 0 0 0 0 0 2.o C 1 10.0 C 2 off 3 3.0 4 2.0 5 off 6 1 8 20.0 9 60 C 7 4.0 10 80 C 1 38 C 12 8 k 13 on 14 30.0 15 10 16 - - CodE 11 CodE 0 0 0 0 0 0 0 0 2.o C 1 10.0 C 2
Bildverarbeitung in der Fügetechnik FANUC irvision
 Bildverarbeitung in der Fügetechnik FANUC irvision Willkommen Benvenuto Welcome Bienvenue FANUC irvision Anforderungen an Robot Vision Hauptaufgabe einer Bildverarbeitung für Roboter ist das Erkennen und
Bildverarbeitung in der Fügetechnik FANUC irvision Willkommen Benvenuto Welcome Bienvenue FANUC irvision Anforderungen an Robot Vision Hauptaufgabe einer Bildverarbeitung für Roboter ist das Erkennen und
09. Lineare Abbildungen und Koordinatentransformationen
 09. Lineare Abbildungen und Koordinatentransformationen Definition. Seien V und W Vektorräume. Unter einer linearen Abbildung versteht man eine Abbildung F : V W, v F v w mit folgender Eigenschaft: F λ
09. Lineare Abbildungen und Koordinatentransformationen Definition. Seien V und W Vektorräume. Unter einer linearen Abbildung versteht man eine Abbildung F : V W, v F v w mit folgender Eigenschaft: F λ
Stereo-3D-Kamera unterstützt das automatisierte Einlagern von Verpackungen Raus aus der Kiste
 Stereo-3D-Kamera unterstützt das automatisierte Einlagern von Verpackungen Raus aus der Kiste Die Automatisierung von Pick-and-Place-Vorgängen ist eine Paradedisziplin für die 3D-Bildverarbeitung. Denn
Stereo-3D-Kamera unterstützt das automatisierte Einlagern von Verpackungen Raus aus der Kiste Die Automatisierung von Pick-and-Place-Vorgängen ist eine Paradedisziplin für die 3D-Bildverarbeitung. Denn
Neue 3D-Robot Vision Produktfamilie: Griff in die Kiste sekundenschnell und robust, selbst bei sehr komplexen Bauteilen
 Sensoren der nächsten Generation: Mit IntelliPICK wird der Griff in die Kiste noch sicherer Neue 3D-Robot Vision Produktfamilie: Griff in die Kiste sekundenschnell und robust, selbst bei sehr komplexen
Sensoren der nächsten Generation: Mit IntelliPICK wird der Griff in die Kiste noch sicherer Neue 3D-Robot Vision Produktfamilie: Griff in die Kiste sekundenschnell und robust, selbst bei sehr komplexen
Anleitung Ranger 3D-Kalibrierung
 EINLEITUNG Der Coordinator ist ein Programm, das die Kalibrierungsprozedur des Rangers vereinfacht und beschleunigt. Kalibrierte 3D-Daten sind entscheidend, wenn korrekte Positionen, Größen, Weite und
EINLEITUNG Der Coordinator ist ein Programm, das die Kalibrierungsprozedur des Rangers vereinfacht und beschleunigt. Kalibrierte 3D-Daten sind entscheidend, wenn korrekte Positionen, Größen, Weite und
Bildverarbeitung - Inhalt
 Bildverarbeitung Bildverarbeitung - Inhalt 1. Anfänge der industriellen Bildverarbeitung 2. Von der Kamera zum Vision Sensor 3. Hardware Konzepte in der BV 4. Beleuchtungssysteme 5. Auswerteverfahren (Software)
Bildverarbeitung Bildverarbeitung - Inhalt 1. Anfänge der industriellen Bildverarbeitung 2. Von der Kamera zum Vision Sensor 3. Hardware Konzepte in der BV 4. Beleuchtungssysteme 5. Auswerteverfahren (Software)
25 JAHRE. Frank Schwabe
 25 JAHRE 1984 2009 FANUC Robot-Vision FANUC Vision Grundgedanken Anforderungen an Robot Vision Hauptaufgabe einer Bildverarbeitung für Roboter ist das Erkennen und Finden des Aufnahmepunktes eines Bauteiles
25 JAHRE 1984 2009 FANUC Robot-Vision FANUC Vision Grundgedanken Anforderungen an Robot Vision Hauptaufgabe einer Bildverarbeitung für Roboter ist das Erkennen und Finden des Aufnahmepunktes eines Bauteiles
Informationsblatt: CALIPRI INLINE VARIANTEN
 Informationsblatt: CALIPRI INLINE VARIANTEN SYSTEME: CALIPRI INLINE VARIANTEN. MULTIFUNKTIONALER UND PROZESSÜBERGREIFENDER EINSATZ. + Die CALIPRI Modelle für Inline-Messungen erfüllen die Forderungen nach
Informationsblatt: CALIPRI INLINE VARIANTEN SYSTEME: CALIPRI INLINE VARIANTEN. MULTIFUNKTIONALER UND PROZESSÜBERGREIFENDER EINSATZ. + Die CALIPRI Modelle für Inline-Messungen erfüllen die Forderungen nach
Deflektometrie Ein Messverfahren für spiegelnde Oberflächen
 Deflektometrie Ein Messverfahren für spiegelnde Oberflächen Dr. Alexander Zimmermann FORWISS Universität Passau Institut für Softwaresysteme in technischen Anwendungen der Informatik 19. Oktober 2017 Gliederung
Deflektometrie Ein Messverfahren für spiegelnde Oberflächen Dr. Alexander Zimmermann FORWISS Universität Passau Institut für Softwaresysteme in technischen Anwendungen der Informatik 19. Oktober 2017 Gliederung
Bildverarbeitende Sensoren der intuitive Einstieg in die Bildverarbeitung
 Ronny Walther Vision & Control GmbH Produktmanager Kamerasysteme Tel: +49 3681 7974-27 E-Mail: ronny.walther@vision-control.com Vision AcademyGmbH?Konrad-Zuse-Str. 15?D-99099 Erfurt / Germany?Tel. +49(0)361
Ronny Walther Vision & Control GmbH Produktmanager Kamerasysteme Tel: +49 3681 7974-27 E-Mail: ronny.walther@vision-control.com Vision AcademyGmbH?Konrad-Zuse-Str. 15?D-99099 Erfurt / Germany?Tel. +49(0)361
Prüfung WS 2006/07. Robotik
 Prüfung WS 26/7 Robotik Anmerkungen: Aufgabenblätter auf Vollständigkeit überprüfen Nur Blätter mit Namen und Matr.Nr. werden korrigiert. Keine rote Farbe verwenden. Zu jeder Lösung Aufgabennummer angeben.
Prüfung WS 26/7 Robotik Anmerkungen: Aufgabenblätter auf Vollständigkeit überprüfen Nur Blätter mit Namen und Matr.Nr. werden korrigiert. Keine rote Farbe verwenden. Zu jeder Lösung Aufgabennummer angeben.
Kurz zu meiner Person: Michael Ziegler
 IoT Industrie 4.0 Kurz zu meiner Person: Michael Ziegler Lehrer an den Beruflichen Schulen Altötting Berufsschule: Elektroniker für Betriebstechnik Berufsschule: Elektroniker für Automatisierungstechnik
IoT Industrie 4.0 Kurz zu meiner Person: Michael Ziegler Lehrer an den Beruflichen Schulen Altötting Berufsschule: Elektroniker für Betriebstechnik Berufsschule: Elektroniker für Automatisierungstechnik
Industrielle Bildverarbeitung Die Vielfalt des maschinellen Sehens in der Montageund Handhabungstechnik. 12.06.2008 Dr.
 Industrielle Bildverarbeitung Die Vielfalt des maschinellen Sehens in der Montageund Handhabungstechnik 12.06.2008 Dr. Michael Stöcker Maschinelles Sehen drei grundsätzliche Teilschritte 1. Sehen Bildgewinnung
Industrielle Bildverarbeitung Die Vielfalt des maschinellen Sehens in der Montageund Handhabungstechnik 12.06.2008 Dr. Michael Stöcker Maschinelles Sehen drei grundsätzliche Teilschritte 1. Sehen Bildgewinnung
vision & id 3D-MotionKit
 3D-MotionKit Ein fertiges Paket für 3D-Prüfaufgaben: Das 3D-MotionKit macht 3D-Merkmale, wie etwa Höhe, Volumen und Oberflächenschieflage messbar. Darüber hinaus wird das 3D-MotionKit dort eingesetzt,
3D-MotionKit Ein fertiges Paket für 3D-Prüfaufgaben: Das 3D-MotionKit macht 3D-Merkmale, wie etwa Höhe, Volumen und Oberflächenschieflage messbar. Darüber hinaus wird das 3D-MotionKit dort eingesetzt,
Datenblatt zu EOS Optical Infrared Tracking-System ZGDV, Darmstadt Stand: 06.2006
 Datenblatt zu EOS Optical Infrared Tracking-System ZGDV, Darmstadt Stand: 06.2006 Das EOS Optical IR-Tracking-System ist eine kombinierte Hardware-Software-Lösung zur Messung von Positionen von starren
Datenblatt zu EOS Optical Infrared Tracking-System ZGDV, Darmstadt Stand: 06.2006 Das EOS Optical IR-Tracking-System ist eine kombinierte Hardware-Software-Lösung zur Messung von Positionen von starren
Der Einbau im Auto. Stereo: Beispiel Fahrzeug. Einbau im Rückspiegel Erfassung von. Reichweite: bis 30 m
 Der Einbau im Auto Sichtbereich Sichtbereich Kameras Einbau im Rückspiegel Erfassung von anderen Fahrzeugen (Pkw,Lkw) Zweiradfahrern Fußgängern und Kindern Reichweite: bis 30 m Digitale Bildverarbeitung
Der Einbau im Auto Sichtbereich Sichtbereich Kameras Einbau im Rückspiegel Erfassung von anderen Fahrzeugen (Pkw,Lkw) Zweiradfahrern Fußgängern und Kindern Reichweite: bis 30 m Digitale Bildverarbeitung
EYEVISION. In drei Schritten zur Bildverarbeitungslösung! Messen Prüfen Kontrollieren Sortieren
 Messen Prüfen Kontrollieren Sortieren Positionieren Vollständigkeitskontrolle Vorhandenseinskontrolle Oberflächeninspektion Teileprüfung Werkzeugvoreinstellung 3D-Sehen 3D-Erkennung Robot Vision Markierungskontrolle
Messen Prüfen Kontrollieren Sortieren Positionieren Vollständigkeitskontrolle Vorhandenseinskontrolle Oberflächeninspektion Teileprüfung Werkzeugvoreinstellung 3D-Sehen 3D-Erkennung Robot Vision Markierungskontrolle
Modell einer Kamera ohne Verzeichnung
 7.3.1 Sichtsysteme - Kamera-Kalibrierung - Lochkamera-Modell 64-424 Intelligente Roboter Modell einer Kamera ohne Verzeichnung Lochkameramodell mit und ohne radiale Linseverzeichnung J. Zhang 460 7.3.1
7.3.1 Sichtsysteme - Kamera-Kalibrierung - Lochkamera-Modell 64-424 Intelligente Roboter Modell einer Kamera ohne Verzeichnung Lochkameramodell mit und ohne radiale Linseverzeichnung J. Zhang 460 7.3.1
Готовые к интеграции Системы позиционирования Каталог 2008
 Готовые к интеграции Системы позиционирования Каталог 2008 www.drivesets.de DriveSet MR105 Auswahlkriterien: Beschreibung Anwendungsgebiete Tragfähigkeitsklasse Geschwindigkeitsklasse Präzisionsklasse
Готовые к интеграции Системы позиционирования Каталог 2008 www.drivesets.de DriveSet MR105 Auswahlkriterien: Beschreibung Anwendungsgebiete Tragfähigkeitsklasse Geschwindigkeitsklasse Präzisionsklasse
Willkommen. in der Welt der Hütten- und Walzwerks-Technologie. Moderne Automatisierungstopologien mit Echtzeit Ethernet am Beispiel EtherCAT
 Willkommen in der Welt der Hütten- und Walzwerks-Technologie Moderne Automatisierungstopologien mit Echtzeit Ethernet am Beispiel EtherCAT Rückblick: 20 Jahre Feldbus Bis 1989: -Zentrale Automatisierungssysteme
Willkommen in der Welt der Hütten- und Walzwerks-Technologie Moderne Automatisierungstopologien mit Echtzeit Ethernet am Beispiel EtherCAT Rückblick: 20 Jahre Feldbus Bis 1989: -Zentrale Automatisierungssysteme
Selbstorganisierende Sensorik VMT Technologie Workshop 2015 Mannheim. www.vmt-vision-technology.com
 Selbstorganisierende Sensorik VMT Technologie Workshop 2015 Mannheim www.vmt-vision-technology.com Einleitung Vision-Sensorik nach Dejustage - Eine Fragen-Sammlung www.vmt-vision-technology.com 2 Vision-Sensorik
Selbstorganisierende Sensorik VMT Technologie Workshop 2015 Mannheim www.vmt-vision-technology.com Einleitung Vision-Sensorik nach Dejustage - Eine Fragen-Sammlung www.vmt-vision-technology.com 2 Vision-Sensorik
Die perfekte Kombination aus bewährter Factory Automation Software für die Automation nun sehr wirtschaftlich mit Embedded PC und GigE-Kameras
 So flexibel, modular und leistungsfähig kann Factory Automation sein. Die perfekte Kombination aus bewährter Factory Automation Software für die Automation nun sehr wirtschaftlich mit Embedded PC und GigE-Kameras
So flexibel, modular und leistungsfähig kann Factory Automation sein. Die perfekte Kombination aus bewährter Factory Automation Software für die Automation nun sehr wirtschaftlich mit Embedded PC und GigE-Kameras
geschlossene Schachtel mit einem kleinen Loch
 Kameramodellierung Lochkamera Kamerakonstante Kamerazentrum geschlossene Schachtel mit einem kleinen Loch ideale Kamera: Loch hat keine Ausdehnung die Strahlen sind ein Büschel von Geraden Abbildung erfolgt
Kameramodellierung Lochkamera Kamerakonstante Kamerazentrum geschlossene Schachtel mit einem kleinen Loch ideale Kamera: Loch hat keine Ausdehnung die Strahlen sind ein Büschel von Geraden Abbildung erfolgt
3D-Sensoren auf PMD-Basis zur Objekterkennung und -verfolgung
 3D-Sensoren auf PMD-Basis zur Objekterkennung und -verfolgung Dipl.-Phys. Hartmut Eigenbrod 10 Jahre Fraunhofer-Allianz Vision Erlangen, 26. Oktober 2007 1 Gliederung Laufzeitkameras und ihre Vor- und
3D-Sensoren auf PMD-Basis zur Objekterkennung und -verfolgung Dipl.-Phys. Hartmut Eigenbrod 10 Jahre Fraunhofer-Allianz Vision Erlangen, 26. Oktober 2007 1 Gliederung Laufzeitkameras und ihre Vor- und
EVT EYESPECTOR READER. Intelligente vielseitige und kompakte Lesesysteme
 OCR (Klarschriftlesen) OCV (Schriftverifikation) Standadzeichensätze OCRA, OCRB, ARIAL,... Zeichensätze einlernbar 2-D Codes DMC Codes (Data Matrix Code) ECC200 Barcodes 2/5, 2/5i Code 39, Code 93, Code128
OCR (Klarschriftlesen) OCV (Schriftverifikation) Standadzeichensätze OCRA, OCRB, ARIAL,... Zeichensätze einlernbar 2-D Codes DMC Codes (Data Matrix Code) ECC200 Barcodes 2/5, 2/5i Code 39, Code 93, Code128
Finden Sortieren Inspizieren. Wie moderne Bildverarbeitung den Verpackungsprozess beflügelt. Thomas Nepstad Produkt Marketing Manager
 Finden Sortieren Inspizieren Wie moderne Bildverarbeitung den Verpackungsprozess beflügelt Thomas Nepstad Produkt Marketing Manager Agenda Wer ist Cognex? Vision in der Verpackungsindustrie Was sind die
Finden Sortieren Inspizieren Wie moderne Bildverarbeitung den Verpackungsprozess beflügelt Thomas Nepstad Produkt Marketing Manager Agenda Wer ist Cognex? Vision in der Verpackungsindustrie Was sind die
Ettlingen _ 2008 WWW.VISION-COMPONENTS.COM // Ettlingen // 2008
 Ettlingen _ 2008 Wer ist VC VC ist innovativer Hersteller intelligenter Kameras für die industrielle Bildverarbeitung. Erfinder der ersten industriellen Smart Kamera (VC11) 1996. Geschäftsführer Michael
Ettlingen _ 2008 Wer ist VC VC ist innovativer Hersteller intelligenter Kameras für die industrielle Bildverarbeitung. Erfinder der ersten industriellen Smart Kamera (VC11) 1996. Geschäftsführer Michael
Computer Vision: 3D-Geometrie. D. Schlesinger () Computer Vision: 3D-Geometrie 1 / 17
 Computer Vision: 3D-Geometrie 1 / 17") Computer Vision: 3D-Geometrie D. Schlesinger () Computer Vision: 3D-Geometrie 1 / 17 Lochkamera Modell C Projektionszentrum, Optische Achse, Bildebene, P Hauptpunkt (optische Achse kreuzt die Bildebene),
Computer Vision: 3D-Geometrie D. Schlesinger () Computer Vision: 3D-Geometrie 1 / 17 Lochkamera Modell C Projektionszentrum, Optische Achse, Bildebene, P Hauptpunkt (optische Achse kreuzt die Bildebene),
Intelligente Datenanalyse mit künstlichen neuronalen Netzen
 Intelligente Datenanalyse mit künstlichen neuronalen Netzen Anforderungen, Beispiele, Ergebnisse Dr.-Ing. Stefan Schünemann Nemo-Forum Industrielle Bildverarbeitung Dresden, 03. April 2007 1/34 Gliederung
Intelligente Datenanalyse mit künstlichen neuronalen Netzen Anforderungen, Beispiele, Ergebnisse Dr.-Ing. Stefan Schünemann Nemo-Forum Industrielle Bildverarbeitung Dresden, 03. April 2007 1/34 Gliederung
Technologiepacket BV-Sensoren
 2016 Technologiepacket BV-Sensoren K.Widmann 7.1.2016 Kurzübersicht BV-Sensoren Die Bildverarbeitungssoftware und dazugehörige BV-Sensoren von EEP sind als Bausteine für eine optische Prüfung, z.b. von
2016 Technologiepacket BV-Sensoren K.Widmann 7.1.2016 Kurzübersicht BV-Sensoren Die Bildverarbeitungssoftware und dazugehörige BV-Sensoren von EEP sind als Bausteine für eine optische Prüfung, z.b. von
ERKENNUNG UND MANIPULATION VON OBJEKTEN IM EINZELHANDEL UND LOGISTIK
 ERKENNUNG UND MANIPULATION VON OBJEKTEN IM EINZELHANDEL UND LOGISTIK Joshua Hampp, Fraunhofer IPA, Stuttgart joshua.hampp@ipa.fraunhofer.de Einleitung Care-O-bot: Eine Produktvision eines mobilen Serviceroboters
ERKENNUNG UND MANIPULATION VON OBJEKTEN IM EINZELHANDEL UND LOGISTIK Joshua Hampp, Fraunhofer IPA, Stuttgart joshua.hampp@ipa.fraunhofer.de Einleitung Care-O-bot: Eine Produktvision eines mobilen Serviceroboters
VISION SENSOR CS 50 DER KLEINSTE VISION SENSOR DER WELT
 VISION SENSOR DER KLEINSTE VISION SENSOR DER WELT EINFACH WIE EIN SENSOR. DIE FEATURES. PERFEKT FÜR KLEINE ARBEITSABSTÄNDE. Vision Sensor der kleinste Vision Sensor der Welt bietet bei einfachstem Handling
VISION SENSOR DER KLEINSTE VISION SENSOR DER WELT EINFACH WIE EIN SENSOR. DIE FEATURES. PERFEKT FÜR KLEINE ARBEITSABSTÄNDE. Vision Sensor der kleinste Vision Sensor der Welt bietet bei einfachstem Handling
Software für Machine Vision Was wirklich zählt Dr. Wolfgang Eckstein MVTec Software GmbH
 Software für Machine Vision Was wirklich zählt Dr. Wolfgang Eckstein MVTec Software GmbH MVTec Software GmbH Firma konzentriert sich auf Building Vision for Business Entwicklung von Standard Softwareprodukten
Software für Machine Vision Was wirklich zählt Dr. Wolfgang Eckstein MVTec Software GmbH MVTec Software GmbH Firma konzentriert sich auf Building Vision for Business Entwicklung von Standard Softwareprodukten
Orientierung. HJ Przybilla
 Orientierung Der Begriff der Orientierung wird in der Photogrammetrie vielfach genutzt. Er beschreibt dabei die geometrischen Zusammenhänge im und um das Messbild. Innere Orientierung Äußere Orientierung
Orientierung Der Begriff der Orientierung wird in der Photogrammetrie vielfach genutzt. Er beschreibt dabei die geometrischen Zusammenhänge im und um das Messbild. Innere Orientierung Äußere Orientierung
Robogistics Robotik und Logistik im Wandel 14. Dt. Materialflusskongress TU München, April 2005
 Robogistics Robotik und Logistik im Wandel 14. Dt. Materialflusskongress TU München, 7.-8. April 2005 Inhalt Einführung Logistische Konzepte Notwendige Komponenten Greiftechnologie Sensorik Praxisbeispiele
Robogistics Robotik und Logistik im Wandel 14. Dt. Materialflusskongress TU München, 7.-8. April 2005 Inhalt Einführung Logistische Konzepte Notwendige Komponenten Greiftechnologie Sensorik Praxisbeispiele
Plug-Ins, Sondermodule und Zusatzlizenzen für NeuroCheck 6.1
 Plug-Ins, Sondermodule und Zusatzlizenzen für NeuroCheck 6.1 Inhalt Auf den folgenden Seiten finden Sie eine Liste von Plug-Ins, besonderen Daten Format Konvertern, besonderen Hardware- Treibern und weiteren
Plug-Ins, Sondermodule und Zusatzlizenzen für NeuroCheck 6.1 Inhalt Auf den folgenden Seiten finden Sie eine Liste von Plug-Ins, besonderen Daten Format Konvertern, besonderen Hardware- Treibern und weiteren
Der EVMA 1288 Standard als Wegweiser zur richtigen Kamera mit der richtigen Bildqualität. Vortragender: Christoph Hoernlen Territory Account Manager
 Der EVMA 1288 Standard als Wegweiser zur richtigen Kamera mit der richtigen Bildqualität Vortragender: Christoph Hoernlen Territory Account Manager Inhalt 1 Einführung in Bildqualität und ihre entscheidende
Der EVMA 1288 Standard als Wegweiser zur richtigen Kamera mit der richtigen Bildqualität Vortragender: Christoph Hoernlen Territory Account Manager Inhalt 1 Einführung in Bildqualität und ihre entscheidende
3D Roboter Vision Innovativ durch integrierte Technologie FANUC TIM JUERGENS
 FACTORY AUTOMATION NUMERICAL CONTROL 3D Roboter Vision Innovativ durch integrierte Technologie 2 Inhalt Fanuc Deutschland GmbH Robotics Award 2014 3D Area Sensor Beladen von 3 Werkzeugmaschinen mit Robotern
FACTORY AUTOMATION NUMERICAL CONTROL 3D Roboter Vision Innovativ durch integrierte Technologie 2 Inhalt Fanuc Deutschland GmbH Robotics Award 2014 3D Area Sensor Beladen von 3 Werkzeugmaschinen mit Robotern
Intelligente Zeilenkameras beinhalten
 Inspektionssysteme mit Verstand Intelligente CCD-Zeilenkameras Intelligente Zeilenkameras beinhalten die komplette Signalverarbeitung konventioneller Bildverarbei tungssysteme integriert in das Kameragehäuse
Inspektionssysteme mit Verstand Intelligente CCD-Zeilenkameras Intelligente Zeilenkameras beinhalten die komplette Signalverarbeitung konventioneller Bildverarbei tungssysteme integriert in das Kameragehäuse
Stereo-Matching. Medieninformatik IL. Andreas Unterweger. Vertiefung Medieninformatik Studiengang ITS FH Salzburg. Wintersemester 2014/15
 Stereo-Matching Medieninformatik IL Andreas Unterweger Vertiefung Medieninformatik Studiengang ITS FH Salzburg Wintersemester 2014/15 Andreas Unterweger (FH Salzburg) Stereo-Matching Wintersemester 2014/15
Stereo-Matching Medieninformatik IL Andreas Unterweger Vertiefung Medieninformatik Studiengang ITS FH Salzburg Wintersemester 2014/15 Andreas Unterweger (FH Salzburg) Stereo-Matching Wintersemester 2014/15
SafeGuiding Technologie
 SafeGuiding Technologie Inhalt o Vorstellung MRK-Systeme GmbH o Kategorisierung anhand der Roboterproduktnorm DIN EN ISO 10218-1: 2011 o Technische Voraussetzungen: KUKA.SafeOperation o SafeGuiding : Technische
SafeGuiding Technologie Inhalt o Vorstellung MRK-Systeme GmbH o Kategorisierung anhand der Roboterproduktnorm DIN EN ISO 10218-1: 2011 o Technische Voraussetzungen: KUKA.SafeOperation o SafeGuiding : Technische
Multinetzwerk-Schnittstellen
 Multinetzwerk-Schnittstellen als Fundament der Kommunikationstechnik im Internet of Things Sercos 2015 Michael Volz 20. Oktober 2015 HMS Zahlen, Daten, Fakten Beijing China Chicago/Boston/LA USA Coventry
Multinetzwerk-Schnittstellen als Fundament der Kommunikationstechnik im Internet of Things Sercos 2015 Michael Volz 20. Oktober 2015 HMS Zahlen, Daten, Fakten Beijing China Chicago/Boston/LA USA Coventry
74 rechtlich unabhängige Unternehmen weltweit. Chief Executive Officer: Klaus Endress. Eigenkapitalrate 43,9 % Mitarbeiter 5,905
 Kundenakte mit Workflow Integriertes Dokumentenmanagement im SAP-Umfeld Dr. Jan M. Olaf, Dr. Ulrich Binninger Folie 1 Einer der führenden Anbieter von Messgeräten und Automatisierungslösungen für die industrielle
Kundenakte mit Workflow Integriertes Dokumentenmanagement im SAP-Umfeld Dr. Jan M. Olaf, Dr. Ulrich Binninger Folie 1 Einer der führenden Anbieter von Messgeräten und Automatisierungslösungen für die industrielle
Bach 3D Messtechnik GmbH, Rosenstraße 18 73760 Ostfildern. Ihr Ansprechpartner bei. BACH 3D Messtechnik GmbH:
 PC-DMIS Schulungen Bach 3D Messtechnik GmbH, Rosenstraße 18 Ihr Ansprechpartner bei BACH 3D Messtechnik GmbH: Herr Thomas Bach Tel. : +49 711 504 629 36 Frau Kerstin Mendel Tel.: +49 711 504 629 38 Fax.
PC-DMIS Schulungen Bach 3D Messtechnik GmbH, Rosenstraße 18 Ihr Ansprechpartner bei BACH 3D Messtechnik GmbH: Herr Thomas Bach Tel. : +49 711 504 629 36 Frau Kerstin Mendel Tel.: +49 711 504 629 38 Fax.
USB auf 2x Seriell Adapter - USB zu RS232 / RS422 / RS485 Seriell Konverter (COM) StarTech ID: ICUSB
 StarTech ID: ICUSB") USB auf 2x Seriell Adapter - USB zu RS232 / RS422 / RS485 Seriell Konverter (COM) StarTech ID: ICUSB2324852 Der ICUSB2324852 2 Port USB-auf-RS232/RS422/RS485-Seriell-Adapter mit COM-Speicherung ermöglicht
USB auf 2x Seriell Adapter - USB zu RS232 / RS422 / RS485 Seriell Konverter (COM) StarTech ID: ICUSB2324852 Der ICUSB2324852 2 Port USB-auf-RS232/RS422/RS485-Seriell-Adapter mit COM-Speicherung ermöglicht
VC Smart Reader: Neue Data Matrix-Software auf Smart Kameras
 Willkommen bei Vision Components The Smart Camera People VC Smart Reader: Neue Data Matrix-Software auf Smart Kameras Referent: Klaus Schneider, Vision Components Das Unternehmen Wer ist VC: VC ist innovativer
Willkommen bei Vision Components The Smart Camera People VC Smart Reader: Neue Data Matrix-Software auf Smart Kameras Referent: Klaus Schneider, Vision Components Das Unternehmen Wer ist VC: VC ist innovativer
3D-Messverfahren Streifenprojektion
 3D-Messverfahren Streifenprojektion Juli 2014 Thomas Köhler Agenda Optische 3D-Messtechnik MarSurf FP 40/180 Was ist messbar mit Streifenlicht? 2 17.07.2014 Thomas Köhler Optische 3D-Messtechnik MarSurf
3D-Messverfahren Streifenprojektion Juli 2014 Thomas Köhler Agenda Optische 3D-Messtechnik MarSurf FP 40/180 Was ist messbar mit Streifenlicht? 2 17.07.2014 Thomas Köhler Optische 3D-Messtechnik MarSurf
GigE Vision: Der Standard
 GigE Vision: Der Standard Rupert Stelz Entwicklung STEMMER IMAGING GmbH Technologie-Tag GigE Vision und GenICam München, 14. September 2006 M E M B E R O F T H E S T E M M E R I M A G I N G G R O U P Gigabit
GigE Vision: Der Standard Rupert Stelz Entwicklung STEMMER IMAGING GmbH Technologie-Tag GigE Vision und GenICam München, 14. September 2006 M E M B E R O F T H E S T E M M E R I M A G I N G G R O U P Gigabit
Industrielle Praxisfälle optischer Oberflächeninspektion in 2D und 3D. Dr. Helge Moritz SIGNUM Computer GmbH, München. www.signum-vision.
 Industrielle Praxisfälle optischer Oberflächeninspektion in 2D und 3D Dr. Helge Moritz SIGNUM Computer GmbH, München www.signum-vision.com Anlässlich des Technikforums Industrielle Bildverarbeitung Industrielles
Industrielle Praxisfälle optischer Oberflächeninspektion in 2D und 3D Dr. Helge Moritz SIGNUM Computer GmbH, München www.signum-vision.com Anlässlich des Technikforums Industrielle Bildverarbeitung Industrielles
(7) Normal Mapping. Vorlesung Computergraphik II S. Müller. Dank an Stefan Rilling U N I V E R S I T Ä T KOBLENZ LANDAU
 Normal Mapping. Vorlesung Computergraphik II S. Müller. Dank an Stefan Rilling U N I V E R S I T Ä T KOBLENZ LANDAU") (7) Normal Mapping Vorlesung Computergraphik II S. Müller Dank an Stefan Rilling Einleitung Die Welt ist voller Details Viele Details treten in Form von Oberflächendetails auf S. Müller - 3 - Darstellung
(7) Normal Mapping Vorlesung Computergraphik II S. Müller Dank an Stefan Rilling Einleitung Die Welt ist voller Details Viele Details treten in Form von Oberflächendetails auf S. Müller - 3 - Darstellung
Anwendungen in der Automatisierungstechnik. Erfahrungen und Perspektiven
 ECKELMANN AG PMD[vision] Day 2008: Bildsensoren mit Tiefgang Anwendungen in der Automatisierungstechnik Erfahrungen und Perspektiven Dr.-Ing. Johannes Stelter eckelmann.de 1 AGENDA 1. Vorstellung der ECKELMANN
ECKELMANN AG PMD[vision] Day 2008: Bildsensoren mit Tiefgang Anwendungen in der Automatisierungstechnik Erfahrungen und Perspektiven Dr.-Ing. Johannes Stelter eckelmann.de 1 AGENDA 1. Vorstellung der ECKELMANN
ENTWICKLUNG EINES MULTISENSORISCHEN ANALYSESYSTEMS FÜR EIN MULTIKRITERIELLES FISCHMONITORING
 ENTWICKLUNG EINES MULTISENSORISCHEN ANALYSESYSTEMS FÜR EIN MULTIKRITERIELLES FISCHMONITORING ÖkoZert VP 6 Dr.-Ing. Andreas Herzog Fraunhofer IFF Magdeburg Magdeburg, den 27. September 2016 Foto: SIBAU
ENTWICKLUNG EINES MULTISENSORISCHEN ANALYSESYSTEMS FÜR EIN MULTIKRITERIELLES FISCHMONITORING ÖkoZert VP 6 Dr.-Ing. Andreas Herzog Fraunhofer IFF Magdeburg Magdeburg, den 27. September 2016 Foto: SIBAU
Vision for Your Automation. 3D-Bildverarbeitungssysteme
 3D-Bildverarbeitungssysteme Unsere Erfahrungen und Innovationen... 2003 2006 2009 2012 2014 2015 2016 Erstes gemeinsames Projekt mit Renault in der 3D-Bildverarbeitung 3D-Roboterführung zur Entnahme von
3D-Bildverarbeitungssysteme Unsere Erfahrungen und Innovationen... 2003 2006 2009 2012 2014 2015 2016 Erstes gemeinsames Projekt mit Renault in der 3D-Bildverarbeitung 3D-Roboterführung zur Entnahme von
encee CAD/CAM Systeme GmbH erweitert ihr Angebot für Fertigungsbetriebe.
 Seite 1 von 5 encee CAD/CAM Systeme GmbH erweitert ihr Angebot für Fertigungsbetriebe. Höchste Prozesssicherheit für alle CNC Maschinen - Reduzierung der Rüst - und Einrichtzeiten um bis zu 80% Fertigungsplaner,
Seite 1 von 5 encee CAD/CAM Systeme GmbH erweitert ihr Angebot für Fertigungsbetriebe. Höchste Prozesssicherheit für alle CNC Maschinen - Reduzierung der Rüst - und Einrichtzeiten um bis zu 80% Fertigungsplaner,
Grundlagen der Farbbildverarbeitung
 Grundlagen der Farbbildverarbeitung Inhalt 1. Grundlagen - Was ist Farbe? - Wie lässt sich Farbe messen? 2. Technik der Farbkameras - Wie kann eine Kamera Farben sehen? - Bauformen 3. Funktion von Farb-BV-Systemen
Grundlagen der Farbbildverarbeitung Inhalt 1. Grundlagen - Was ist Farbe? - Wie lässt sich Farbe messen? 2. Technik der Farbkameras - Wie kann eine Kamera Farben sehen? - Bauformen 3. Funktion von Farb-BV-Systemen
Projektpraktikum: Bildauswertung und fusion Wintersemester 2013 / 2014
 Projektpraktikum: Bildauswertung und fusion Wintersemester 2013 / 2014 ies.anthropomatik.kit.edu Bildvergleich mittels Image Warping Themenbeschreibung: Zur Bildklassifikation oder Bildsuche können Image
Projektpraktikum: Bildauswertung und fusion Wintersemester 2013 / 2014 ies.anthropomatik.kit.edu Bildvergleich mittels Image Warping Themenbeschreibung: Zur Bildklassifikation oder Bildsuche können Image
products PC-Control
 products PC-Control 04 2017 PC-Control 04 2017 products Bildverarbeitung in der SPS TwinCAT Vision Einfache Integration der Bildverarbeitung in die Automatisierungstechnik Das automatische Erkennen, die
products PC-Control 04 2017 PC-Control 04 2017 products Bildverarbeitung in der SPS TwinCAT Vision Einfache Integration der Bildverarbeitung in die Automatisierungstechnik Das automatische Erkennen, die
BOSCH Video goes IP. Dinion IP mit ivmd. Security Systems
 BOSCH Video goes IP 1 Dinion XF Neue Maßstäbe: + 15 Bit Bildverarbeitung 2 Dinion XF Neue Maßstäbe: + XF-Dynamic Dinion XF 3 Dinion IP Neue Maßstäbe: + + + + Dinion IP mit allen Features der Dinion XF
BOSCH Video goes IP 1 Dinion XF Neue Maßstäbe: + 15 Bit Bildverarbeitung 2 Dinion XF Neue Maßstäbe: + XF-Dynamic Dinion XF 3 Dinion IP Neue Maßstäbe: + + + + Dinion IP mit allen Features der Dinion XF
COMPLETE INSPECT. Software zur Vollständigkeits- und Qualitätskontrolle. Produktbeschreibung
 COMPLETE INSPECT Software zur Vollständigkeits- und Qualitätskontrolle Produktbeschreibung 2 COMPLETE INSPECT Kontakt und Support Hotline: +43(0)7252 885-0 Email: completeinspect@profactor.at Web: www.profactor.at/completeinspect
COMPLETE INSPECT Software zur Vollständigkeits- und Qualitätskontrolle Produktbeschreibung 2 COMPLETE INSPECT Kontakt und Support Hotline: +43(0)7252 885-0 Email: completeinspect@profactor.at Web: www.profactor.at/completeinspect
Neue Ansätze für Mustererkennung und automatisches Lernen
 Z Y X Neue Ansätze für Mustererkennung und automatisches Lernen Vortrag im Rahmen des 2. Technologieforums Bildverarbeitung am 03./04. November 2015 Johannes Zügner STEMMER IMAGING GmbH, Puchheim GLIEDERUNG
Z Y X Neue Ansätze für Mustererkennung und automatisches Lernen Vortrag im Rahmen des 2. Technologieforums Bildverarbeitung am 03./04. November 2015 Johannes Zügner STEMMER IMAGING GmbH, Puchheim GLIEDERUNG
ABBILDUNGEN. Schiebung, Drehung, Spiegelung, Streckung. Version 2.0 Herbert Paukert. Definition der Abbildungen [ 02 ] Theorie der Abbildungen [ 07 ]
![ABBILDUNGEN. Schiebung, Drehung, Spiegelung, Streckung. Version 2.0 Herbert Paukert. Definition der Abbildungen [ 02 ] Theorie der Abbildungen [ 07 ]](/thumbs/57/40928847.jpg "ABBILDUNGEN. Schiebung, Drehung, Spiegelung, Streckung. Version 2.0 Herbert Paukert. Definition der Abbildungen [ 02 ] Theorie der Abbildungen [ 07 ]") Ein PAUMEDIA-Projekt Herbert Paukert 1 ABBILDUNGEN Schiebung, Drehung, Spiegelung, Streckung Version 2.0 Herbert Paukert Definition der Abbildungen [ 02 ] Theorie der Abbildungen [ 07 ] Hauptachsen-Transformationen
Ein PAUMEDIA-Projekt Herbert Paukert 1 ABBILDUNGEN Schiebung, Drehung, Spiegelung, Streckung Version 2.0 Herbert Paukert Definition der Abbildungen [ 02 ] Theorie der Abbildungen [ 07 ] Hauptachsen-Transformationen
Industrial Vision Days 2016
 Industrial Vision Days 2016 Machine Vision Anwendungen einfach gemacht Mit grafischer Programmierung schnell zum Ziel (Peter Schregle, Impuls Imaging GmbH) Impuls Imaging GmbH Schlingener Strasse 4 86842
Industrial Vision Days 2016 Machine Vision Anwendungen einfach gemacht Mit grafischer Programmierung schnell zum Ziel (Peter Schregle, Impuls Imaging GmbH) Impuls Imaging GmbH Schlingener Strasse 4 86842
Technisches Datenblatt dialog Web 1. Produktbeschreibung
 Technisches Datenblatt 1. Produktbeschreibung Der Server ist die Basis für eine Bedienung aller Raumautomationsfunktionen per Webbrowser und/oder IP-fähigen Telefonen (optional) für bis zu 150 Räume. Für
Technisches Datenblatt 1. Produktbeschreibung Der Server ist die Basis für eine Bedienung aller Raumautomationsfunktionen per Webbrowser und/oder IP-fähigen Telefonen (optional) für bis zu 150 Räume. Für
Optionale Funktion Förderbandnachführung
 Herausgegeben Optionale Funktion Förderbandnachführung Die Ausführungen der Scara Robot I Baureihe sind um die Funktion Förderband-Nachführung erweitert worden (Betriebsarten Visuelle Nachführung und Werkstück-Sensornachführung
Herausgegeben Optionale Funktion Förderbandnachführung Die Ausführungen der Scara Robot I Baureihe sind um die Funktion Förderband-Nachführung erweitert worden (Betriebsarten Visuelle Nachführung und Werkstück-Sensornachführung
Fortgeschrittene Bildverarbeitung und Analyse
 Fortgeschrittene Bildverarbeitung und Analyse Studiengang IEM Inhalt Definition der Bildverarbeitung Verarbeitung-Bearbeitung (Systeme) Grundlagen der Abbildungssysteme Auge, visuelle Wahrnehmung, Kamera,
Fortgeschrittene Bildverarbeitung und Analyse Studiengang IEM Inhalt Definition der Bildverarbeitung Verarbeitung-Bearbeitung (Systeme) Grundlagen der Abbildungssysteme Auge, visuelle Wahrnehmung, Kamera,
Mixed Reality Labor. Anleitung zum Entwickeln an der Stereoleinwand. Vorlesung Virtuelle & Augmentierte Realität WS 09/10.
 Mixed Reality Labor Anleitung zum Entwickeln an der Stereoleinwand Vorlesung Virtuelle & Augmentierte Realität WS 09/10 1 Sinn & Zweck Diese kurze Anleitung soll den Einstieg in den Umgang mit dem Stereorenderingsystem
Mixed Reality Labor Anleitung zum Entwickeln an der Stereoleinwand Vorlesung Virtuelle & Augmentierte Realität WS 09/10 1 Sinn & Zweck Diese kurze Anleitung soll den Einstieg in den Umgang mit dem Stereorenderingsystem
Fachartikel. Objektiv dank Objektiv. Neue telezentrische Messobjektive für Objektfelddurchmesser bis 57 mm
 Vision & Control GmbH Mittelbergstraße 16 98527 Suhl. Germany Telefon: +49 3681 / 79 74-0 Telefax: +49 36 81 / 79 74-33 www.vision-control.com Fachartikel Objektiv dank Objektiv Neue telezentrische Messobjektive
Vision & Control GmbH Mittelbergstraße 16 98527 Suhl. Germany Telefon: +49 3681 / 79 74-0 Telefax: +49 36 81 / 79 74-33 www.vision-control.com Fachartikel Objektiv dank Objektiv Neue telezentrische Messobjektive
Warum ausgerechnet Zeilenscanner?
 Vortrags-Zusammenfassung Neue Wege der optischen Inspektion mit Telezentrie und Retroreflex auch für Glasfasern! Warum ausgerechnet Zeilenscanner? Zeilenscanner und im speziellen telezentrische Zeilenscanner
Vortrags-Zusammenfassung Neue Wege der optischen Inspektion mit Telezentrie und Retroreflex auch für Glasfasern! Warum ausgerechnet Zeilenscanner? Zeilenscanner und im speziellen telezentrische Zeilenscanner
Vision for Your Automation. Lokalisierung
 Vision for Your Automation Lokalisierung FÜHRUNG Griff in die Kiste IDENTIFIKATION ONLINE-MESSUNG Lokalisierung Um die Beladung einer Fertigungslinie kostengünstig zu automatisieren. Unser 3D-Visionssystem
Vision for Your Automation Lokalisierung FÜHRUNG Griff in die Kiste IDENTIFIKATION ONLINE-MESSUNG Lokalisierung Um die Beladung einer Fertigungslinie kostengünstig zu automatisieren. Unser 3D-Visionssystem
Hannes Heckner (mobilex AG) Telefoneinwahl: +49 (0)69 / 20 45 72 650
 Telefoneinwahl: +49 (0)69 / 20 45 72 650") Hannes Heckner, mobilex AG Dynamische Formulare in Service und Instandhaltung - mehr als bloß die Ablösung von Papier Hannes Heckner (mobilex AG) Telefoneinwahl: +49 (0)69 / 20 45 72 650 Access Code: 52607599#
Hannes Heckner, mobilex AG Dynamische Formulare in Service und Instandhaltung - mehr als bloß die Ablösung von Papier Hannes Heckner (mobilex AG) Telefoneinwahl: +49 (0)69 / 20 45 72 650 Access Code: 52607599#
von Prof. Dr. P. H. Osanna, Prof. Dr. N. M. Durakbasa, Dr. techn. L. Kräuter Inhalt
 Geometrische Produktspezifikation und -Verifikation "GPS" und Messunsicherheit nach "GUM" als Basis moderner Metrologie im fortschrittlichen Produktionsbetrieb von Prof. Dr. P. H. Osanna, Prof. Dr. N.
Geometrische Produktspezifikation und -Verifikation "GPS" und Messunsicherheit nach "GUM" als Basis moderner Metrologie im fortschrittlichen Produktionsbetrieb von Prof. Dr. P. H. Osanna, Prof. Dr. N.
Optimal auf Ihren Schaltschrank zugeschnitten Der Smart Switch: schmal, simpel und sichtbar
 1 Optimal auf Ihren Schaltschrank zugeschnitten Der Smart Switch: schmal, simpel und sichtbar Was ist der Smart Switch? Der Smart Switch SDS-3008 ist der weltweit kleinste industrielle Switch mit 8 Ports.
1 Optimal auf Ihren Schaltschrank zugeschnitten Der Smart Switch: schmal, simpel und sichtbar Was ist der Smart Switch? Der Smart Switch SDS-3008 ist der weltweit kleinste industrielle Switch mit 8 Ports.