Einführung Echtzeitsysteme
|
|
|
- Käte Acker
- vor 6 Jahren
- Abrufe
Transkript
1 Einführung im Alltag 28



2 sind allgegenwärtig! 29
3 Einleitung Anwendungen am Lehrstuhl / fortiss 30



4 Steuerungsaufgaben (Praktika+Studienarbeiten) 31

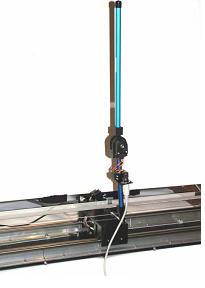

5 Regelungsaufgaben (Praktika+Studienarbeiten) Schwebender Stab Produktionstechnik Invertiertes Pendel 32



6 Robotersteuerung Stäubli Robotino Leonardo Tumanoid 33
7 Aktuelle Entwicklung: Cyber-Physical Systems Cyber-Physical System (CPS) bestehen aus mehreren Subsystemen von denen mindestens eines dieser Subsysteme mit der Umgebung interagiert ( eingebettetes System mit Echtzeitanforderungen). Die Subsysteme sind typischerweise unabhängig voneinander entwickelt worden, sollen aber doch die Integration miteinander eine bessere Funktionalität liefern. Wandel ist ein ständiger Begleiter. Abgrenzung zu anderen Forschungsthemen: Aktive Interaktion mit der Umgebung: Sensornetzwerke sind zunächst keine CPS Unabhängigkeit der Subsysteme: Unterscheidung zu klassischen eingebetteten, vernetzten Systemen Generell: die Integration muss sehr häufig autonom erfolgen, es gibt keine Firma, die die Integratorenrolle übernimmt Integration über Standards anstelle durch Personen Mehr zu dem Thema unter: (Agenda CPS) 34
8 Leitprojekte von fortiss im Bereich / Cyber- Physical Systems Am fortiss wird eine große Zahl von Projekten im Bereich bzw. Cyber-Physical Systems für die Anwendungsgebiete Automotive, Industrieautomatisierung und Robotik durchgeführt Nahezu alle Projekte werden zusammen mit attraktiven Industriepartnern durchgeführt (u.a. Audi, BMW, EADS, Festo,Siemens) Für die Hörer dieser Vorlesung bieten sich zum Einstieg drei Projekte besonders an: die Leitprojekte RACE, AutoPnP und SME Robotics Wir freuen uns über interessierte Studenten und bieten: Spannende Studienarbeiten (Bachelor-, Master-, Guided Research) Interessante Werkstudententätigkeiten Möglichkeiten zur Promotion als wissenschaftlicher Mitarbeiter Mehr unter: 35

9 Entwicklung eines Versuchsträgers für Plug&Play-fähige Fahrzeuge auf Basis eines Zentralrechnerkonzeptes Deutliche Vereinfachung der Entwicklung auf von komplexen Funktionen, wie dem autonomen Fahren Im Rahmen eines Studentenwettbewerbes können Studenten eigene Funktionen für das neue Elektrofahrzeug entwickeln Mehr Infos unter Projektidee RACE 36

10 RACE Demonstrator Autonomes Fahren 37

11 Entwicklung einer wandelbaren Fabrik, die vollautomatisch ihre Topologie erkennt und das Produktionsprogramm synthetisiert und so sehr flexibel an neue Produkte angepasst werden kann. Projekt AutoPnP Industrie 4.0 Mehr Infos unter 38

12 Projekt SME Robotics Entwicklung von intuitiv programmierbaren Robotern für den produzierenden Mittelstand Mehr Infos unter 39
13 Erfolgskontrolle: Was sollten Sie aus dem Kapitel mitgenommen haben? Definition und Unterscheidung der Begriffe: Echtzeitsystem und eingebettete Systeme Harte / weiche Kenntnis von Beispielen für Wichtigste Aussage: heißt nicht schnell, sondern die Garantierung von maximalen Antwort- / Berechnungszeiten Grundlage zur Beurteilung einer Technologie, ob diese echtzeitfähig ist 40
14 Klausur WS 06/07 Klausurfragen Was ist der Unterschied zwischen harten und weichen n? (3 Punkte = 3 min) Antwort: siehe Folien Wieso sollte Virtual Memory nicht in n verwendet werden? (3 Punkte = 3 min) Antwort: Bei Verwendung von Virtual Memory hängt die Ausführungszeit davon ab, ob bei einem Speicherzugriff der Speicherplatz schon im Virtual Memory ist oder erst aus dem Hintergrundspeicher nachgeladen werden muss die Zugriffszeiten unterscheiden sich für beide Situationen deutlich und erschweren die Zeitanalyse. Wiederholungsklausur WS 06/07 (5 Punkte = 5 min) Ordnen Sie folgende Anwendungen in die Kategorien harte bzw. weiche ein und begründen Sie Ihre Antwort: Ampelsteuerung Flugzeugregelung Internettelefonie Antwort: Harte : Flugzeugregelung (Verzögerung kann zu Absturz führen), Ampelsteuerung (durch verzögerte Nachrichtenübermittlung können zwei Ampeln gleichzeitig auf grün schalten Unfallgefahr), weiche : Internettelefonie (Verzögerungen führen zu Aussetzern im Gespräch verminderte Qualität, aber keine großen Schäden); Zeitablauf einer Ampel: wenn die Ampel länger rot bleibt (aber das Gesamtsystem konsistent ist) führt die zu einer verminderten Qualität
15 Klausur WS 10/11 Klausurfragen Gegeben sind folgende Aussagen über : (i) Harte sind Systeme, die besonders schnell sind, also besonders kurze Berechnungszeiten haben. (ii) Harte sind Systeme, bei denen ein bestimmtes Zeitverhalten garantiert werden kann, wobei das Zeitverhalten aber langsam sein kann. Welche dieser Aussagen ist richtig? Geben Sie für die richtige Aussage ein Beispiel an, das ein Echtzeitsystem ist. Geben Sie für die falsche Aussage ein Beispiel an, das zwar die Aussage erfüllt, aber kein Echtzeitsystem ist. Antwort: Aussage (i): Falsch. Beispiel: eine Anfrage in einer Suchmaschine wird zwar sehr schnell beantwortet, allerdings ist es kein hartes Echtzeitsystem. Aussage (ii): Richtig. Beispiel: Ampelsteuerung. Das Zeitverhalten ist im Sekunden- bzw. Minutenbereich, allerdings muss sichergestellt sein, dass alle Ampeln gleichzeitig umschalten.
16 Kapitel 2 Uhren & Synchronisation 43
17 Inhalt Motivation Definition Zeit Uhren Synchronisation Algorithmus von Cristian Algorithmus aus Berkeley NTP-Protokoll Synchronisation bei fehlerbehafteten Uhren 44
18 Literatur Links zum Thema Zeit: Uhrensynchronisation: Leslie Lamport: Synchronizing clocks in the presence of faults,
19 Relevanz für : Zeit und Ordnung Da viele Vorgänge in der Umwelt und Physik auf Zeit basieren, müssen häufig die Zeit wahrnehmen und darauf basierend interagieren können. Weitere Anforderung: Einordnen von Ereignissen im verteilten System (bevorzugt im Sinne einer zeitlichen Abfolge) globale Zeitbasis hilft bei der Ableitung einer zeitlichen Ordnung Zeitsynchronisation wird benötigt 46
. Eine Sonnensekunde ist 1/86400 dieser Spanne.")
20 Definition Zeit Historisch: Jeden Tag gegen Mittag erreicht die Sonne ihren höchsten Punkt am Himmel. Die Zeitspanne zwischen zwei aufeinander folgenden Ereignissen dieses Typs heißt Tag (genauer gesagt: ein Sonnentag). Eine Sonnensekunde ist 1/86400 dieser Spanne. Zeitmessung heute: Verwendung von Atomuhren: eine Sekunde ist die fache Periodendauer, der dem Übergang zwischen den beiden Hyperfeinstrukturniveaus des Grundzustands von 133 Cäsium-Atomen entsprechenden Strahlung. Am entsprach die Atomsekunde genau einer Sonnensekunde. Aufgrund von unregelmäßigen Schwankungen, sowie einer langfristigen Verlangsamung der Erdrotation unterscheiden sich die Atomsekunde und die Sonnensekunde. Sonnenuhr Deutsches Museum Erste Cäsiumatomuhr 47

21 TAI (Temps Atomique International) TAI: Atomzeitskala, die zur Koordination nationaler Atomzeiten ermittelt wird: Beteiligung von 50 verschiedene Zeitinstitute mit ca. 250 Atomuhren Zeit basiert auf der Atomsekunde Referenzzeitpunkt ist der 1.Januar 1970 relative Genauigkeit von +/ , aber keine exakte Übereinstimmung mit der Sonnenzeit Atomuhr der Physikalisch- Technischen Bundesanstalt in Braunschweig 48
 synchronisiert Anpassung erfolgt zumeist zu Ende oder Mitte des Jahres")
22 eigentlicher Nachfolger der Greenwichzeit realisiert durch Atomuhren, die Zeiteinheit ist die SI-Sekunde hochkonstante Zeiteinheit zusätzlich Übereinstimmung mit dem Sonnenlauf einheitliche Grundlage zur Zeitbestimmung im täglichen Leben Durch Einfügen von Schaltsekunden wird die UTC mit der universellen Sonnenzeit (UT1) synchronisiert Anpassung erfolgt zumeist zu Ende oder Mitte des Jahres (typischer Abstand: alle 18 Monate) UTC (Coordinated Universal Time) Zeitzonen 49

23 DCF77 Das PTB überträgt die aktuelle Uhrzeit über den Langwellensender DCF77 Die Zeitinformationen werden als digitales Signal (negative Modulation Absenkung der Trägeramplitude) im Sekundentakt übertragen. '0' und '1' werden durch eine Absenkung um 100ms bzw. 200 ms codiert. In der Sekunde 59 erfolgt keine Absenkung Markierung der Beginn einer neuen Minute bei nächster Amplitudenabsenkung. Pro Minute stehen somit 59 Bit zur Verfügung (wobei Bit 0-14 für Betriebsinformationen verwendet werden) 50


24 Zeit kann durch unendliche Menge T von Zeitpunkten ( Instants ) modelliert werden T ist dann eine geordnete Menge, d.h. falls p und q zwei Zeitpunkte sind so treten sie entweder: Gleichzeitig oder Eines nach dem anderen ein p vor q oder q vor p (mutually exclusive) Ordnung zwischen den Zeitpunkten heißt temporale Ordnung T ist dicht Zeit als Modell zwischen zwei Zeitpunkten p und r liegt zumindest ein weiterer Zeitpunkt q, dann und nur dann wenn p und r nicht gleichzeitig sind. Intervall aus T heißt Zeitraum oder Dauer 51
25 Uhren und Synchronisation Uhren 52




26 Aufgaben Absolutzeitgeber Datum, Uhrzeit zeitabhängige Aufträge Zeitstempel, Logbuch Ursache-Wirkung-Feststellung Relativzeitgeber Verzögerungen Messen von Zeitabständen Zyklische Ausführung, Messungen Zeitüberwachung von Wartezuständen 53
27 Genauigkeit von Uhren Eine Uhr arbeitet korrekt, wenn sie die vom Hersteller angegebene maximale Driftrate einhält, auch wenn sie dann etwas zu schnell oder zu langsam ist. Typische Driftraten: Uhrentyp Driftrate Abweichung pro Jahr Quarzuhr 10-5 ~ 300 sec Pendeluhr 10-6 ~ 30 sec Atomuhr 1,5*10-14 ~ 0,5 Mikrosekunden Atomuhr (lasergekühlte Atome) ~ 0.03 Mikrosekunden 54
28 Korrekt: 1. Absolutwert der Abweichung kleiner der zugesicherten Gangabweichung Fehlerbehaftet: 2. Überschreiten der zugesicherten Gangabweichung 3. Zustandsfehler (z.b. Sprung im Zählerwert) 4. Stehenbleiben der Uhr Unmöglich: 5. Rückwärtslaufende Uhr 6. Unendlich schnell laufende Uhr Uhrenverhalten Die Gangabweichung zweier korrekter Uhren kann beliebig groß werden, wenn die Uhren nicht synchronisiert sind. 55
29 Uhren und Synchronisation Synchronisation 56


30 Ziel ist es verschiedenen, unabhängigen Prozessen, die auf unterschiedlichen Rechnern laufen, zu ermöglichen konsistente Entscheidungen über die Ordnung verschiedener Ereignisse zu ermöglichen Unterscheidung zwischen: Ziele der Uhrensynchronisation Logischer Uhr: Zuordnung von Sequenznummern zu Ereignissen Physikalische Uhren: Zuordnung eines Zeitstempels zu Ereignissen Im Rahmen dieses Abschnittes wird nur die Synchronisation von physikalischen Uhren betrachtet. Mehr zur Synchronisation von logischen Uhren findet man unter: nt/08-clocks.pdf 57
31 Folgende Annahmen werden im Zusammenhang mit der Synchronisation gemacht: 1. Alle Uhren besitzen zu Beginn in etwa die gleiche Zeit (in diesem Abschnitt wird vor allem die laufenden Synchronisation betrachtet). 2. Die Uhren fehlerfreier Prozesse gehen annähernd richtig, d.h. sie besitzen eine ähnliche Ganggenauigkeit. 3. Ein fehlerfreier Prozess p kann die Differenz seiner Uhr von der Uhr von Prozess q mit einer Genauigkeit bestimmen. Anforderungen an die Synchronisation: Grundlagen 1. Zu jedem Zeitpunkt zeigen die Uhren zweier fehlerfreier Prozesse ungefähr den gleichen Wert. 2. Durch die Synchronisation entstehen keine bzw. nur sehr kleine Zeitsprünge 3. Insbesondere darf die Kausalität nicht verletzt werden (z.b. Zurückstellen der Zeit) Notwendig, da sonst keine konsistente Ausführung (z.b. wegen Anweisungen mit absoluten Zeitangaben) garantiert werden kann. 58
32 Zeitpunkt: typischerweise erfolgt die Synchronisation periodisch Rollen der Knoten: externe Synchronisation: die Synchronisation erfolgt anhand einer externen, als perfekt angenommenen Uhr interne Synchronisation: die Uhren ermitteln basierend auf den einzelnen Zeitwerten eine korrekte, globale Zeitbasis Vorteil der externen Synchronisation: der maximal tolerierte Fehler kann halb so groß wie bei der internen Synchronisation gewählt werden. Ort der Synchronisation: zentrale Synchronisation: Synchronisation wird von einer Einheit koordiniert fehleranfällig verteilte Synchronisation: alle Einheiten berechnen die globale Zeitbasis hohes Datenaufkommen Umgang mit Synchronisationsunterschieden: Anpassung der Uhrenfrequenz Arten der Synchronisation Kleine Zeitsprünge: wichtig ist, dass hier Probleme mit der Programmlogik ausgeschlossen werden Krzyzanoski, Rutgers University, CS 417: Distributed Systems 59
33 Algorithmus von Cristian (1989) Das Verfahren basiert auf verteilter, externer Synchronisation. Innerhalb des Systems existiert ein Time-Server, zumeist ein UTC-Empfänger. In regelmäßigen Abständen senden die anderen Einheiten einen Time-Request, der so schnell wie möglich vom Server beantwortet wird. Client T 1 T 2 Server Nachrichtenverzögerung Nachrichtenverzögerung Behandlungszeit 60
34 Algorithmus von Cristian Nach Empfang kann die Uhr auf die empfangene Uhrzeit gesetzt werden. 1. Problem: Zeitsprünge würden entstehen. Lösung: Die Uhr wird graduell angepasst (Beispiel: Herabsetzung des Intervalls zwischen zwei Uhrenticks von 1ms auf 0.9ms, falls lokale Uhr zu langsam war). 2. Problem: Nachricht ist veraltet, wenn die Nachrichtenverzögerung nicht vernachlässigbar ist. Lösung: Messung der Nachrichtenverzögerung Abschätzung, falls Informationen fehlen: (T 1 -T 2 )/2 Falls die Behandlungszeit bekannt ist, kann das Ergebnis weiter verbessert werden. Zusätzliche Verbesserung: Ermittlung eines Durchschnittswertes, Ausreißer müssen dabei außer acht gelassen werden. Umso genauer die Verzögerung berechnet werden kann, desto besser funktioniert die Uhrensynchronisation 61
35 t-ms t-sm Master time t 1 t 4 Sync Follow_Up Delay_Req Delay_Resp Slave time t 2 t 3 Timestamps known by slave t 2 t 1, t 2 t 1, t 2, t 3 t 1, t 2, t 3, t 4 Grandmaster- M S- BC - M S- OC John Eidson, Vortrag , München Erhöhung der Genauigkeit: Standard IEEE 1588 Under the assumption that the link is symmetric Offset = (Slave time) (Master time) = [(t 2 t 1 ) (t 4 t 3 )]/2 = [(t-ms) (t-sm)]/2 (propagation time) = [(t 2 t 1 ) + (t 4 t 3 )]/2 = [(t-ms) + (tsm)]/2 Can rewrite the offset as Offset = t 2 t 1 (propagation time) = (t-ms) (propagation time) If the link is not symmetric The propagation time computed as above is the mean of the master-toslave and slave-to- master propagation times The offset is in error by the difference between the actual master-to-slave and mean propagation times IF you know the asymmetry, the standard specifies how to correct for it. 62
36 MASTER SLAVE Fakultät für Informatik Ordinary clock: Application IEEE 1588 Timing Support (e.g. time stamping, time triggers ) T1 Sync T2 Application Code IEEE 1588 Clock T4 Delay_Req T3 OS IEEE 1588 Code IEEE 1588 Control MAC MII IEEE 1588 Packet Detection PHY John Eidson, Vortrag , München LAN PHY chips available containing all red-blocks except IEEE 1588 code block

37 Switch Synchronization accuracy results 2 Std. Dev. Offset: nanoseconds Std. Dev: 121 ns Max/min: -430,+720 ns RCS switch, 8 hours Hirschmann Boundary Clock Switch 2 Std. Dev. Offset: nanoseconds Std. Dev: 24 ns Max/min: -100,+100 ns 84 hours Labs Boundary Clock Switch Offset: nanoseconds Std. Dev: 15 ns Max/min: -35,+45 ns 1 hour For all of the above the clock resolution was ns John Eidson, Vortrag , München
38 Annahme: kein UTC-Empfänger verfügbar Algorithmus (zentral, intern): Algorithmus von Berkeley (1989) ein Rechner agiert als aktiver Time-Server. Der Server fragt periodisch die Zeiten/Unterschiede aller anderen Rechner ab (Phase 1) und ermittelt den Durchschnittswert (Phase2). In Phase 3 wird der errechnete Wert an alle anderen Uhren ausgegeben :00 13:00 13: Phase 1 Phase 2 Phase
39 NTP: Network Time Protocol (1982) Problem: Die angegebenen Algorithmen funktionieren nur in kleinen statischen Netzen. Das NTP Protokoll bietet eine Möglichkeit in großen Netzen eine Synchronisation zu gewährleisten. Die Netze können dabei dynamisch konfiguriert werden, um eine zuverlässige Synchronisation zu gewährleisten. Die Grundstruktur von NTP ist ein hierarchisches Modell (mit verschiedenen Strata/Schichten). Der Dienst wird durch ein verteiltes Serversystem geleistet. Primäre Server sind direkt mit einer UTC-Quelle verbunden. Sekundäre Server synchronisieren sich mit primären Servern usw. Jede zusätzliche Schicht verursacht einen zusätzlichen Zeitversatz von ms. 1 UTC
Fakultät für Informatik der Technischen Universität München. Kapitel 7. Uhren & Synchronisation
 Kapitel 7 Uhren & Synchronisation 1 Inhalt Motivation Definition Zeit Uhren Synchronisation Algorithmus von Cristian Algorithmus aus Berkeley NTP-Protokoll Synchronisation bei fehlerbehafteten Uhren 2
Kapitel 7 Uhren & Synchronisation 1 Inhalt Motivation Definition Zeit Uhren Synchronisation Algorithmus von Cristian Algorithmus aus Berkeley NTP-Protokoll Synchronisation bei fehlerbehafteten Uhren 2
Algorithmus von Berkeley (1989)
") Annahme: kein UTC Empfänger verfügbar Algorithmus (zentral, intern): Algorithmus von Berkeley (1989) ein Rechneragiert als aktiver Time Server. Der Server fragt periodisch die Zeiten/Unterschiede aller
Annahme: kein UTC Empfänger verfügbar Algorithmus (zentral, intern): Algorithmus von Berkeley (1989) ein Rechneragiert als aktiver Time Server. Der Server fragt periodisch die Zeiten/Unterschiede aller
Verteilte Systeme - 3. Übung
 Verteilte Systeme - 3. Übung Dr. Jens Brandt Sommersemester 2011 1. Zeit in verteilten Systemen a) Nennen Sie mindestens drei verschiedene Ursachen zeitlicher Verzögerungen, die bei einem Entwurf eines
Verteilte Systeme - 3. Übung Dr. Jens Brandt Sommersemester 2011 1. Zeit in verteilten Systemen a) Nennen Sie mindestens drei verschiedene Ursachen zeitlicher Verzögerungen, die bei einem Entwurf eines
Uhrensynchronisation. Dipl.-Inf. J. Richling Wintersemester 2003/2004
 Uhrensynchronisation Dipl.-Inf. J. Richling Wintersemester 2003/2004 Motivation Zeit kann in Anwendungen eine große Rolle spielen, insbesondere bei Echtzeitsystemen Häufig wichtiger noch als korrekte Zeit:
Uhrensynchronisation Dipl.-Inf. J. Richling Wintersemester 2003/2004 Motivation Zeit kann in Anwendungen eine große Rolle spielen, insbesondere bei Echtzeitsystemen Häufig wichtiger noch als korrekte Zeit:
Kommunikation in drahtlosen Sensornetzen
 Kommunikation in drahtlosen Sensornetzen Zeitsynchronisation in drahtlosen Sensornetzen (DSN) Michael Oeste - 674177 Michael Oeste 12.02.2007-1 / 27 Inhalt Problematik der Zeitsynchronisation Zeit Synchronisation
Kommunikation in drahtlosen Sensornetzen Zeitsynchronisation in drahtlosen Sensornetzen (DSN) Michael Oeste - 674177 Michael Oeste 12.02.2007-1 / 27 Inhalt Problematik der Zeitsynchronisation Zeit Synchronisation
Elementare Systemkomponenten:
 Elementare Systemkomponenten: Zeitsynchronisation Verteilten Systemen (Time Service) VSS1-Time-1 Zeit und Koordination: Einführung Grundsätzliche Alternativen: externe Synchronisation interne Synchronisation
Elementare Systemkomponenten: Zeitsynchronisation Verteilten Systemen (Time Service) VSS1-Time-1 Zeit und Koordination: Einführung Grundsätzliche Alternativen: externe Synchronisation interne Synchronisation
One way Delay (OWD) Determination Techniques
 Determination Techniques") Lehrstuhl Netzarchitekturen und Netzdienste Institut für Informatik Technische Universität München One way Delay (OWD) Determination Techniques Referent: Mislav Boras Betreuer: Dirk Haage Seminar: Innovative
Lehrstuhl Netzarchitekturen und Netzdienste Institut für Informatik Technische Universität München One way Delay (OWD) Determination Techniques Referent: Mislav Boras Betreuer: Dirk Haage Seminar: Innovative
Vorlesung "Verteilte Systeme" Sommersemester 1999. Verteilte Systeme NTP) Verteilte Systeme, Sommersemester 1999 Folie 4.2
 Verteilte Systeme, Sommersemester 1999 Folie 4.2") Verteilte Systeme 4. Zeit Ansätze Pragmatisch: Uhrensynchronisation Abgleich der lokalen Uhren Beispiele Zeitabgleich nach F. Christian Berkeley-Algorithmus Verteilte Synchronisation Network Time Protocol
Verteilte Systeme 4. Zeit Ansätze Pragmatisch: Uhrensynchronisation Abgleich der lokalen Uhren Beispiele Zeitabgleich nach F. Christian Berkeley-Algorithmus Verteilte Synchronisation Network Time Protocol
Verteilte Systeme SS 2015. Universität Siegen rolanda.dwismuellera@duni-siegena.de Tel.: 0271/740-4050, Büro: H-B 8404. Stand: 7.
 Verteilte Systeme SS 2015 Universität Siegen rolanda.dwismuellera@duni-siegena.de Tel.: 0271/740-4050, Büro: H-B 8404 Stand: 7. Juli 2015 Betriebssysteme / verteilte Systeme Verteilte Systeme (1/13) i
Verteilte Systeme SS 2015 Universität Siegen rolanda.dwismuellera@duni-siegena.de Tel.: 0271/740-4050, Büro: H-B 8404 Stand: 7. Juli 2015 Betriebssysteme / verteilte Systeme Verteilte Systeme (1/13) i
EMES: Eigenschaften mobiler und eingebetteter Systeme. Uhrensynchronisation. Dr. Siegmar Sommer, Dr. Peter Tröger Wintersemester 2009/2010
 EMES: Eigenschaften mobiler und eingebetteter Systeme 00101111010010011101001010101 Uhrensynchronisation Dr. Siegmar Sommer, Dr. Peter Tröger Wintersemester 2009/2010 00101111010010011101001010101 Motivation
EMES: Eigenschaften mobiler und eingebetteter Systeme 00101111010010011101001010101 Uhrensynchronisation Dr. Siegmar Sommer, Dr. Peter Tröger Wintersemester 2009/2010 00101111010010011101001010101 Motivation
Überblick. Zeit Motivation Network Time Protocol (NTP) Logische Uhren. c td VS (SS16) Zeit 9 1
 Logische Uhren. c td VS (SS16) Zeit 9 1") Überblick Zeit Motivation Network Time Protocol (NTP) Logische Uhren c td VS (SS16) Zeit 9 1 Motivation Zeit als Mittel zur Reihenfolgebestimmung (Beispiele) Erkennung von Modifikationen an Dateien (z.
Überblick Zeit Motivation Network Time Protocol (NTP) Logische Uhren c td VS (SS16) Zeit 9 1 Motivation Zeit als Mittel zur Reihenfolgebestimmung (Beispiele) Erkennung von Modifikationen an Dateien (z.
Überblick. Zeit Motivation Konvergenz-Algorithmus CNV Network Time Protocol (NTP) Logische Uhren. c td VS (SS17) Zeit 8 1
 Logische Uhren. c td VS (SS17) Zeit 8 1") Überblick Zeit Motivation Konvergenz-Algorithmus CNV Network Time Protocol (NTP) Logische Uhren c td VS (SS17) Zeit 8 1 Motivation Zeit als Mittel zur Reihenfolgebestimmung (Beispiele) Erkennung von Modifikationen
Überblick Zeit Motivation Konvergenz-Algorithmus CNV Network Time Protocol (NTP) Logische Uhren c td VS (SS17) Zeit 8 1 Motivation Zeit als Mittel zur Reihenfolgebestimmung (Beispiele) Erkennung von Modifikationen
Grundlagen verteilter Systeme
 Universität Augsburg Insitut für Informatik Prof. Dr. Bernhard Bauer Wolf Fischer Christian Saad Wintersemester 08/09 Übungsblatt 5 26.11.08 Grundlagen verteilter Systeme Lösungsvorschlag Aufgabe 1: Erläutern
Universität Augsburg Insitut für Informatik Prof. Dr. Bernhard Bauer Wolf Fischer Christian Saad Wintersemester 08/09 Übungsblatt 5 26.11.08 Grundlagen verteilter Systeme Lösungsvorschlag Aufgabe 1: Erläutern
Verteilte Systeme. Synchronisation I. Prof. Dr. Oliver Haase
 Verteilte Systeme Synchronisation I Prof. Dr. Oliver Haase 1 Überblick Synchronisation 1 Zeit in verteilten Systemen Verfahren zum gegenseitigen Ausschluss Synchronisation 2 Globale Zustände Wahlalgorithmen
Verteilte Systeme Synchronisation I Prof. Dr. Oliver Haase 1 Überblick Synchronisation 1 Zeit in verteilten Systemen Verfahren zum gegenseitigen Ausschluss Synchronisation 2 Globale Zustände Wahlalgorithmen
Zeitsynchronisation in Sensornetzen. Kay Römer ETH Zürich Switzerland
 Zeitsynchronisation in Sensornetzen Kay Römer ETH Zürich Switzerland Überblick Wozu wird Zeit gebraucht? Warum Forschung notwendig? Varianten von Synchronisation Eigenschaften von Sensorknoten Einmalige
Zeitsynchronisation in Sensornetzen Kay Römer ETH Zürich Switzerland Überblick Wozu wird Zeit gebraucht? Warum Forschung notwendig? Varianten von Synchronisation Eigenschaften von Sensorknoten Einmalige
Experimentelle Bewertung der Synchronisationsgenauigkeit von IEEE 802.1AS für variierende Temperaturbedingungen
 Experimentelle Bewertung der Synchronisationsgenauigkeit von IEEE 802.1AS für variierende Temperaturbedingungen Andreas Kern (Daimler AG) Helge Zinner (Continental Automotive GmbH) Thilo Streichert (Daimler
Experimentelle Bewertung der Synchronisationsgenauigkeit von IEEE 802.1AS für variierende Temperaturbedingungen Andreas Kern (Daimler AG) Helge Zinner (Continental Automotive GmbH) Thilo Streichert (Daimler
Einführung Echtzeitsysteme
 Einführung im Alltag 28 Zentralübung - Hintergrund Ziele: Klärung offener Fragen Anwendung der gelernten Inhalte Ansprechpartner für Probleme Methodik: Interaktive Gestaltung: Ihre Mitwirkung ist wichtig
Einführung im Alltag 28 Zentralübung - Hintergrund Ziele: Klärung offener Fragen Anwendung der gelernten Inhalte Ansprechpartner für Probleme Methodik: Interaktive Gestaltung: Ihre Mitwirkung ist wichtig
Bitte verwenden Sie nur dokumentenechtes Schreibmaterial!
 VO 182.713 Prüfung Echtzeitsysteme 27. März 2015 KNr. MNr. Zuname, Vorname Ges.)(100) 1.)(35) 2.)(25) 3.)(15) 4.)(25) Zusatzblätter: Bitte verwenden Sie nur dokumentenechtes Schreibmaterial! 1 Grundlagen
VO 182.713 Prüfung Echtzeitsysteme 27. März 2015 KNr. MNr. Zuname, Vorname Ges.)(100) 1.)(35) 2.)(25) 3.)(15) 4.)(25) Zusatzblätter: Bitte verwenden Sie nur dokumentenechtes Schreibmaterial! 1 Grundlagen
Grundlagen: Überblick
 Grundlagen: Überblick Verteilte Systeme Definition Grundbegriffe Kommunikation Klassifikation von Fehlern Begriffe Fehlerarten Analyse von Algorithmen Korrektheit Komplexität Verteilte Algorithmen (VA),
Grundlagen: Überblick Verteilte Systeme Definition Grundbegriffe Kommunikation Klassifikation von Fehlern Begriffe Fehlerarten Analyse von Algorithmen Korrektheit Komplexität Verteilte Algorithmen (VA),
Ebenen der Synchronisierung
 Keywords DCF77 GPS IEEE 1588 Synchronisierung abgestimmte Sensorerfassung gleichzeitige Ereignisse externe Uhr Gleichzeitigkeit EL6688 EL6692 Ebenen der Synchronisierung Dieses Application Example erklärt
Keywords DCF77 GPS IEEE 1588 Synchronisierung abgestimmte Sensorerfassung gleichzeitige Ereignisse externe Uhr Gleichzeitigkeit EL6688 EL6692 Ebenen der Synchronisierung Dieses Application Example erklärt
Prof. Dr. Th. Letschert CS5001. Verteilte Systeme. Master of Science (Informatik) - Formalisierungen, Logische Zeit - Th Letschert FH Gießen-Friedberg
 - Formalisierungen, Logische Zeit - Th Letschert FH Gießen-Friedberg") Prof. Dr. Th. Letschert CS5 Master of Science (Informatik) - Formalisierungen, Logische Zeit - Th Letschert FH Gießen-Friedberg Formalisierung verteilter Berechnungen Logische Zeit 2 Formalisierung verteilter
Prof. Dr. Th. Letschert CS5 Master of Science (Informatik) - Formalisierungen, Logische Zeit - Th Letschert FH Gießen-Friedberg Formalisierung verteilter Berechnungen Logische Zeit 2 Formalisierung verteilter
Nottebohmstraße Lüdenscheid DEUTSCHLAND. Tel.: Fax: Web:
 Nottebohmstraße 41 58511 Lüdenscheid DEUTSCHLAND Tel.: +49-2351-9386-86 Fax: +49-2351-9386-93 Web: http://www.hopf.com Besuchen Sie uns online: Was ist Zeit? Definitionen des Zeitbegriffs und Methoden
Nottebohmstraße 41 58511 Lüdenscheid DEUTSCHLAND Tel.: +49-2351-9386-86 Fax: +49-2351-9386-93 Web: http://www.hopf.com Besuchen Sie uns online: Was ist Zeit? Definitionen des Zeitbegriffs und Methoden
Zeitsynchronisation in Sensornetzen
 Zeitsynchronisation in Sensornetzen Seminarvortrag von Tobias Krauer 06.05.2003 Zeitsynchronisation in Sensornetzen 1 Zeitsynchronisation in Sensornetzen Gliederung 1. Motivation & Einführung 2. Anforderungskatalog
Zeitsynchronisation in Sensornetzen Seminarvortrag von Tobias Krauer 06.05.2003 Zeitsynchronisation in Sensornetzen 1 Zeitsynchronisation in Sensornetzen Gliederung 1. Motivation & Einführung 2. Anforderungskatalog
Verteilte Algorithmen
 Verteilte Algorithmen Zeitsynchronisation (Time Service) Zustandsalgorithmen VIS-1 VertAlg-1 VIS1-VertAlg-1 Gliederung Übersicht verteilte Algorithmen Zeitalgorithmen Zustandsalgorithmen VIS-1 VertAlg-2
Verteilte Algorithmen Zeitsynchronisation (Time Service) Zustandsalgorithmen VIS-1 VertAlg-1 VIS1-VertAlg-1 Gliederung Übersicht verteilte Algorithmen Zeitalgorithmen Zustandsalgorithmen VIS-1 VertAlg-2
S1 Zeit in verteilten Systemen
 S1 Zeit in verteilten Systemen Süddeutsche Zeitung vom 1.1.1 FK4 Prof. Dr. Rainer Seck 1 Eigenschaften verteilter Systeme Szenarien: konkurrierender Zugriff auf einmal vorhandene Betriebsmittel verteilter
S1 Zeit in verteilten Systemen Süddeutsche Zeitung vom 1.1.1 FK4 Prof. Dr. Rainer Seck 1 Eigenschaften verteilter Systeme Szenarien: konkurrierender Zugriff auf einmal vorhandene Betriebsmittel verteilter
Uberblick Verteilte Synchronisation Zeit in verteilten Systemen Logische Uhr Synchronisation Aufgabe 6 VS- Ubung (SS15) Verteilte Synchronisation 10 1
 Verteilte Synchronisation 10 1") Überblick Verteilte Synchronisation Zeit in verteilten Systemen Logische Uhr Synchronisation Aufgabe 6 VS-Übung (SS15) Verteilte Synchronisation 10 1 Zeit in verteilten Systemen Ist Ereignis A auf Knoten
Überblick Verteilte Synchronisation Zeit in verteilten Systemen Logische Uhr Synchronisation Aufgabe 6 VS-Übung (SS15) Verteilte Synchronisation 10 1 Zeit in verteilten Systemen Ist Ereignis A auf Knoten
Verteilte Algorithmen. Zeitsynchronisation (Time Service) Zustandsalgorithmen
 Zustandsalgorithmen") Verteilte Algorithmen Zeitsynchronisation (Time Service) Zustandsalgorithmen VIS-1 VertAlg-1 Gliederung Übersicht verteilte Algorithmen Zeitalgorithmen ith Zustandsalgorithmen VIS-1 VertAlg-2 Übersicht
Verteilte Algorithmen Zeitsynchronisation (Time Service) Zustandsalgorithmen VIS-1 VertAlg-1 Gliederung Übersicht verteilte Algorithmen Zeitalgorithmen ith Zustandsalgorithmen VIS-1 VertAlg-2 Übersicht
Grundlagen verteilter Systeme
 Universität Augsburg Institut für Informatik Prof. Dr. Bernhard Bauer Stephan Roser Viviane Schöbel Wintersemester 07/08 Übungsblatt 4 18.1.07 Grundlagen verteilter Systeme Lösungsvorschlag Aufgabe 1:
Universität Augsburg Institut für Informatik Prof. Dr. Bernhard Bauer Stephan Roser Viviane Schöbel Wintersemester 07/08 Übungsblatt 4 18.1.07 Grundlagen verteilter Systeme Lösungsvorschlag Aufgabe 1:
Wie man Computer übers Internet identifiziert
 Remote Physical Device Fingerprinting Wie man Computer übers Internet identifiziert ein Vortrag von Cyrus Massoumi und Johannes Zschoche Chair for Communication Technology (ComTec), Faculty of Electrical
Remote Physical Device Fingerprinting Wie man Computer übers Internet identifiziert ein Vortrag von Cyrus Massoumi und Johannes Zschoche Chair for Communication Technology (ComTec), Faculty of Electrical
Uhrensynchronisation & Gruppenkommunikation. Jan-Arne Sobania Seminar Prozesssteuerung und Robotik 10. Dezember 2008
 Uhrensynchronisation & Gruppenkommunikation Jan-Arne Sobania Seminar Prozesssteuerung und Robotik 10. Dezember 2008 Gliederung 2 Uhrensynchronisation Zeitmessung Interne vs. Externe Synchronisation Synchronisation
Uhrensynchronisation & Gruppenkommunikation Jan-Arne Sobania Seminar Prozesssteuerung und Robotik 10. Dezember 2008 Gliederung 2 Uhrensynchronisation Zeitmessung Interne vs. Externe Synchronisation Synchronisation
Verteilte Systeme - Synchronisation
 Verteilte Systeme - Synchronisation... alois.schuette@h-da.de Alois Schütte 25. Februar 2014 1 / 24 Inhaltsverzeichnis Die Synchronisationsmethoden bei Einprozessorsystemen (z.b. Semaphore oder Monitore)
Verteilte Systeme - Synchronisation... alois.schuette@h-da.de Alois Schütte 25. Februar 2014 1 / 24 Inhaltsverzeichnis Die Synchronisationsmethoden bei Einprozessorsystemen (z.b. Semaphore oder Monitore)
Allgemeines Sender Signal Empfang Dekodierung Quellen. DCF77 Zeitsignal. Sebastian Lauck. Fakultät IV Technische Universität Berlin Projektlabor
 Fakultät IV Technische Universität Berlin Projektlabor 22. Mai 2014 Inhaltsverzeichnis 1 Allgemeines 2 Sender 3 Signal 4 Empfang 5 Dekodierung 6 Quellen Was ist DCF77? DCF77 ist ein Zeitzeichensender sendet
Fakultät IV Technische Universität Berlin Projektlabor 22. Mai 2014 Inhaltsverzeichnis 1 Allgemeines 2 Sender 3 Signal 4 Empfang 5 Dekodierung 6 Quellen Was ist DCF77? DCF77 ist ein Zeitzeichensender sendet
Elementare Systemkomponenten:
 Elementare Systemkomponenten: Zeitsynchronisation in verteilten Systemen (Time Service) VIS2-Time-1 Gibt es etwas aus der Welt der Technik, das Sie besonders beeindruckt? F.A.Z. Mein funkgesteuerter Wecker,
Elementare Systemkomponenten: Zeitsynchronisation in verteilten Systemen (Time Service) VIS2-Time-1 Gibt es etwas aus der Welt der Technik, das Sie besonders beeindruckt? F.A.Z. Mein funkgesteuerter Wecker,
Lösung Verteilte Systeme WS 2011/12 Teil 1
 Seite 1 von 5 Lösung Verteilte Systeme WS 2011/12 Teil 1 2.02.2012 1. Aufgabe (5) Sie fahren in Ihrem Privatfahrzeug auf einer Autobahn und hinter Ihnen fährt ein Polizeifahrzeug. 1.1 Nennen Sie ein Szenario,
Seite 1 von 5 Lösung Verteilte Systeme WS 2011/12 Teil 1 2.02.2012 1. Aufgabe (5) Sie fahren in Ihrem Privatfahrzeug auf einer Autobahn und hinter Ihnen fährt ein Polizeifahrzeug. 1.1 Nennen Sie ein Szenario,
Verteilte Systeme. Synchronisation II. Prof. Dr. Oliver Haase
 Verteilte Systeme Synchronisation II Prof. Dr. Oliver Haase 1 Überblick Synchronisation 1 Zeit in verteilten Systemen Verfahren zum gegenseitigen Ausschluss Synchronisation 2 Globale Zustände Wahlalgorithmen
Verteilte Systeme Synchronisation II Prof. Dr. Oliver Haase 1 Überblick Synchronisation 1 Zeit in verteilten Systemen Verfahren zum gegenseitigen Ausschluss Synchronisation 2 Globale Zustände Wahlalgorithmen
Aufgabe 2.1: Lamports Uhren
 Aufgabe 2.1: Lamports Uhren Die Relation a ereignet sich kausal vor b wird kurz als a b notiert. Von zwei Ereignissen a und b sind logische Zeitstempel nach Lamport, C(a) und C(b), bekannt, und es gilt
Aufgabe 2.1: Lamports Uhren Die Relation a ereignet sich kausal vor b wird kurz als a b notiert. Von zwei Ereignissen a und b sind logische Zeitstempel nach Lamport, C(a) und C(b), bekannt, und es gilt
3 Physikalische Größen
 3 Physikalische Größen Warum hat der Tag 24 Stunden? Warum drehen sich die Zeiger einer Uhr im Uhrzeigersinn? 3.1 Wert und Einheit Physikalische Größe = Zahlenwert Einheit G = { G } [ G ] Verknüpfung physikalischer
3 Physikalische Größen Warum hat der Tag 24 Stunden? Warum drehen sich die Zeiger einer Uhr im Uhrzeigersinn? 3.1 Wert und Einheit Physikalische Größe = Zahlenwert Einheit G = { G } [ G ] Verknüpfung physikalischer
Übung zur Vorlesung Echtzeitsysteme
 Technische Universität München Fakultät für Informatik Forschungs- und Lehreinheit Informatik VI Übung zur Vorlesung Echtzeitsysteme Aufgabe 3 Nadine Keddis keddis@fortiss.org Stephan Sommer sommerst@in.tum.de
Technische Universität München Fakultät für Informatik Forschungs- und Lehreinheit Informatik VI Übung zur Vorlesung Echtzeitsysteme Aufgabe 3 Nadine Keddis keddis@fortiss.org Stephan Sommer sommerst@in.tum.de
Softwareentwicklung in verteilten Umgebungen, Teil 8 Time and Global States (Coulouris et al., Kapitel 11) Dieter Schmalstieg
 Dieter Schmalstieg") Softwareentwicklung in verteilten Umgebungen, Teil 8 Time and Global States (Coulouris et al., Kapitel 11) Dieter Schmalstieg Zeit und Uhren in Computersystemen Netw ork Uhren auf verschiedenen Computern
Softwareentwicklung in verteilten Umgebungen, Teil 8 Time and Global States (Coulouris et al., Kapitel 11) Dieter Schmalstieg Zeit und Uhren in Computersystemen Netw ork Uhren auf verschiedenen Computern
IEEE 1588, Standard for a Precision Clock Synchronization Protocol for Networked Measurement and Control Systems. Tutorial
 Zürcher Hochschule Winterthur IEEE 1588, Standard for a Precision Clock Synchronization Protocol for Networked Measurement and Control Systems Tutorial Prof. Hans Weibel, Zürcher Hochschule Winterthur
Zürcher Hochschule Winterthur IEEE 1588, Standard for a Precision Clock Synchronization Protocol for Networked Measurement and Control Systems Tutorial Prof. Hans Weibel, Zürcher Hochschule Winterthur
Zeitsynchronisierung gemäss IEEE 1588
 Zeitsynchronisierung gemäss IEEE 1588 SIP5-APN-028, Edition 2 www.siemens.com/siprotec Zeitsynchronisierung gemäss IEEE 1588 SIPROTEC 5 Applikation Zeitsynchronisierung über IEEE 1588 SIP5-APN-028, Edition
Zeitsynchronisierung gemäss IEEE 1588 SIP5-APN-028, Edition 2 www.siemens.com/siprotec Zeitsynchronisierung gemäss IEEE 1588 SIPROTEC 5 Applikation Zeitsynchronisierung über IEEE 1588 SIP5-APN-028, Edition
Fehlertolerante Uhrensynchronisation
 Fehlertolerante Uhrensynchronisation Jens Chr. Lisner lisner@informatik.uni-essen.de Institut für Informatik / Universität Essen Institut für Informatik / Universität Essen p.1/23 Übersicht Algorithmus
Fehlertolerante Uhrensynchronisation Jens Chr. Lisner lisner@informatik.uni-essen.de Institut für Informatik / Universität Essen Institut für Informatik / Universität Essen p.1/23 Übersicht Algorithmus
Untersuchungen zur Genauigkeit von Flow- Erfassungsmechanismen
 Untersuchungen zur Genauigkeit von Flow- Erfassungsmechanismen ITG FG 5.2.3 Jochen Kögel jochen.koegel@ikr.uni-stuttgart.de 6. Oktober 2010 Universität Stuttgart Institut für Kommunikationsnetze und Rechnersysteme
Untersuchungen zur Genauigkeit von Flow- Erfassungsmechanismen ITG FG 5.2.3 Jochen Kögel jochen.koegel@ikr.uni-stuttgart.de 6. Oktober 2010 Universität Stuttgart Institut für Kommunikationsnetze und Rechnersysteme
1Raum-Zeit-Materie-Wechselwirkungen
 1Raum-Zeit-Materie-Wechselwirkungen 1. 11 1.1 Der Raum 1.2 Raum und Metermaß 1.3 Die Zeit 1.4 Materie 1.5 Wechselwirkungen 1.1 Der Raum Wir sehen: Neben-, Über- und Hintereinander von Gegenständen Objektive
1Raum-Zeit-Materie-Wechselwirkungen 1. 11 1.1 Der Raum 1.2 Raum und Metermaß 1.3 Die Zeit 1.4 Materie 1.5 Wechselwirkungen 1.1 Der Raum Wir sehen: Neben-, Über- und Hintereinander von Gegenständen Objektive
Produktinformation CANalyzer.IP
 Produktinformation CANalyzer.IP Inhaltsverzeichnis 1 Einführung... 3 1.1 Die Vorteile im Überblick... 3 1.2 Anwendungsgebiete... 3 1.3 Weiterführende Informationen... 4 2 Funktionen... 4 3 Hardware...
Produktinformation CANalyzer.IP Inhaltsverzeichnis 1 Einführung... 3 1.1 Die Vorteile im Überblick... 3 1.2 Anwendungsgebiete... 3 1.3 Weiterführende Informationen... 4 2 Funktionen... 4 3 Hardware...
Technische Dokumentation. Zeitsender REG Best. Nr Zeitsender REG. Änderungen vorbehalten Stand: 05/2006 Seite 1/10
 Änderungen vorbehalten Stand: 05/2006 Seite 1/10 Inhaltsverzeichnis 1 FUNKTIONSEIGENSCHAFTEN...3 1.1 Vorteile...3 1.2 Besonderheiten...3 2 DAS APPLIKATIONSPROGRAMM ZEITSENDER REG V1.0...4 2.1 Auswahl in
Änderungen vorbehalten Stand: 05/2006 Seite 1/10 Inhaltsverzeichnis 1 FUNKTIONSEIGENSCHAFTEN...3 1.1 Vorteile...3 1.2 Besonderheiten...3 2 DAS APPLIKATIONSPROGRAMM ZEITSENDER REG V1.0...4 2.1 Auswahl in
Wintersemester 2014/2015. Überblick. Prof. Dr. Peter Mandl Verteilte Systeme
 Überblick Wintersemester 2014/2015 Verteilte Systeme Einführung und Überblick Zeitsynchronisation Wahl und Übereinstimmung RPC, verteilte Objekte und Dienste Verteilte Transaktionen Message Passing Middlewareplattformen
Überblick Wintersemester 2014/2015 Verteilte Systeme Einführung und Überblick Zeitsynchronisation Wahl und Übereinstimmung RPC, verteilte Objekte und Dienste Verteilte Transaktionen Message Passing Middlewareplattformen
Network Time Protocol NTP
 Network Time Protocol NTP Autor: Luca Costa, HTW Chur, luca.costa@tet.htwchur.ch Dozent: Bruno Wenk, HTW Chur, bruno.wenk@fh-htwchur.ch Inhaltsverzeichnis 1 Network Time Protocol... 3 1.1 Einleitung...
Network Time Protocol NTP Autor: Luca Costa, HTW Chur, luca.costa@tet.htwchur.ch Dozent: Bruno Wenk, HTW Chur, bruno.wenk@fh-htwchur.ch Inhaltsverzeichnis 1 Network Time Protocol... 3 1.1 Einleitung...
Busse. Dr.-Ing. Volkmar Sieh. Institut für Informatik 3: Rechnerarchitektur Friedrich-Alexander-Universität Erlangen-Nürnberg WS 2008/2009
 Busse Dr.-Ing. Volkmar Sieh Institut für Informatik 3: Rechnerarchitektur Friedrich-Alexander-Universität Erlangen-Nürnberg WS 2008/2009 Busse 1/40 2008-10-13 Übersicht 1 Einleitung 2 Bus-Konfiguration
Busse Dr.-Ing. Volkmar Sieh Institut für Informatik 3: Rechnerarchitektur Friedrich-Alexander-Universität Erlangen-Nürnberg WS 2008/2009 Busse 1/40 2008-10-13 Übersicht 1 Einleitung 2 Bus-Konfiguration
Kinematik & Dynamik. Über Bewegungen und deren Ursache Die Newton schen Gesetze. Physik, Modul Mechanik, 2./3. OG
 Kinematik & Dynamik Über Bewegungen und deren Ursache Die Newton schen Gesetze Physik, Modul Mechanik, 2./3. OG Stiftsschule Engelberg, Schuljahr 2016/2017 1 Einleitung Die Mechanik ist der älteste Teil
Kinematik & Dynamik Über Bewegungen und deren Ursache Die Newton schen Gesetze Physik, Modul Mechanik, 2./3. OG Stiftsschule Engelberg, Schuljahr 2016/2017 1 Einleitung Die Mechanik ist der älteste Teil
Diskrete Strukturen Kapitel 1: Einleitung
 WS 2015/16 Diskrete Strukturen Kapitel 1: Einleitung Hans-Joachim Bungartz Lehrstuhl für wissenschaftliches Rechnen Fakultät für Informatik Technische Universität München http://www5.in.tum.de/wiki/index.php/diskrete_strukturen_-_winter_15
WS 2015/16 Diskrete Strukturen Kapitel 1: Einleitung Hans-Joachim Bungartz Lehrstuhl für wissenschaftliches Rechnen Fakultät für Informatik Technische Universität München http://www5.in.tum.de/wiki/index.php/diskrete_strukturen_-_winter_15
Übung Multimediasysteme. Delay types. Dirk Henrici, Bernd Reuther
 Delay types 1 Delay II: Aufgabenstellung Angenommen jemand fährt mit seinem PKW von Kaiserslautern nach Berlin und benötigt für diese Strecke (655km) ca. 7 Stunden. Bei dem PKW handelt es sich um einen
Delay types 1 Delay II: Aufgabenstellung Angenommen jemand fährt mit seinem PKW von Kaiserslautern nach Berlin und benötigt für diese Strecke (655km) ca. 7 Stunden. Bei dem PKW handelt es sich um einen
Produktinformation CANoe.Ethernet
 Produktinformation CANoe.Ethernet Inhaltsverzeichnis 1 Einführung... 3 1.1 Die Vorteile im Überblick... 3 1.2 Anwendungsgebiete... 4 1.3 Weiterführende Informationen... 4 2 Funktionen... 4 3 Hardware...
Produktinformation CANoe.Ethernet Inhaltsverzeichnis 1 Einführung... 3 1.1 Die Vorteile im Überblick... 3 1.2 Anwendungsgebiete... 4 1.3 Weiterführende Informationen... 4 2 Funktionen... 4 3 Hardware...
Vor- und Nachteile der Fehlermaskierung
 Vor- und Nachteile der Fehlermaskierung Fehlermaskierung reicht als einziges Fehlertoleranz-Verfahren aus. Maskierer lassen sich vergleichsweise einfach implementieren. Wiederholungsbetrieb entfällt, dadurch
Vor- und Nachteile der Fehlermaskierung Fehlermaskierung reicht als einziges Fehlertoleranz-Verfahren aus. Maskierer lassen sich vergleichsweise einfach implementieren. Wiederholungsbetrieb entfällt, dadurch
Überblick. Zeit in verteilten Systemen. Echtzeit-basierte Uhren. Synchronsation von Echtzeit-Uhren: NTP, PTP
 Überblick Zeit in verteilten Systemen Ist Ereignis A auf Knoten X passiert bevor B auf Y passiert ist? Beispiele: Internet-Auktion, Industrie-Steuerungen,... Verteilte Synchronisation Zeit in verteilten
Überblick Zeit in verteilten Systemen Ist Ereignis A auf Knoten X passiert bevor B auf Y passiert ist? Beispiele: Internet-Auktion, Industrie-Steuerungen,... Verteilte Synchronisation Zeit in verteilten
Synchronisation von physikalischen Uhren
 Synchronisation von physikalischen Uhren Verteilte Algorithmen (VA), WS 2003/04 15 Synchronisation von physikalischen Uhren Physikalische Zeit basierend auf Atom-Sekunde: TAI "Die Sekunde ist das 9 192
Synchronisation von physikalischen Uhren Verteilte Algorithmen (VA), WS 2003/04 15 Synchronisation von physikalischen Uhren Physikalische Zeit basierend auf Atom-Sekunde: TAI "Die Sekunde ist das 9 192
WLAN & Sicherheit IEEE
 WLAN & Sicherheit IEEE 802.11 Präsentation von Petar Knežić & Rafael Rutkowski Verbundstudium TBW Informations- und Kommunikationssysteme Sommersemester 2007 Inhalt Grundlagen IEEE 802.11 Betriebsarten
WLAN & Sicherheit IEEE 802.11 Präsentation von Petar Knežić & Rafael Rutkowski Verbundstudium TBW Informations- und Kommunikationssysteme Sommersemester 2007 Inhalt Grundlagen IEEE 802.11 Betriebsarten
Prof. Dr. Th. Letschert CS5001. Verteilte Systeme. Master of Science (Informatik) - Einleitung - Th Letschert FH Gießen-Friedberg
 - Einleitung - Th Letschert FH Gießen-Friedberg") Prof. Dr. Th. Letschert CS5001 Master of Science (Informatik) - - Th Letschert FH Gießen-Friedberg Modulnr.: CS5001 Verwendbar : Master of Science (Informatik) Master of Science (Wirtschaftsinformatik)
Prof. Dr. Th. Letschert CS5001 Master of Science (Informatik) - - Th Letschert FH Gießen-Friedberg Modulnr.: CS5001 Verwendbar : Master of Science (Informatik) Master of Science (Wirtschaftsinformatik)
Zeitsynchronisation in drahtlosen Sensornetzen Verfahren und Anwendungen
 Zeitsynchronisation in drahtlosen Sensornetzen Verfahren und Anwendungen Dipl.-Inf. Stefan Schramm Wissenschaftlicher Mitarbeiter Internationale wissenschaftliche Konferenz Mittweida Mittweida, 05.11.2014
Zeitsynchronisation in drahtlosen Sensornetzen Verfahren und Anwendungen Dipl.-Inf. Stefan Schramm Wissenschaftlicher Mitarbeiter Internationale wissenschaftliche Konferenz Mittweida Mittweida, 05.11.2014
Das Network Time Protocol - NTP. Das Network Time Protocol - NTP. Das Network Time Protocol - NTP. Das Network Time Protocol - NTP
 Ausführliche Informationen zu NTP im WWW: Eigenschaften von NTP http://www.ntp.org ("Offizielle" NTP-Homepage) http://www.eecis.udel.edu/~mills (Homepage David Mills) Geschichte Entwickelt seit 198 (NTP
Ausführliche Informationen zu NTP im WWW: Eigenschaften von NTP http://www.ntp.org ("Offizielle" NTP-Homepage) http://www.eecis.udel.edu/~mills (Homepage David Mills) Geschichte Entwickelt seit 198 (NTP
Kap. 8: Globale Zeit /
 Kap. 8: Globale Zeit / Uhrensynchronisation 81 8.1 Einführung 8.2 Zeitbegriff und Zeitsysteme 83 8.3 Rechneruhren 8.4 Synchronisationsprotokolle 85 8.5 Logische Zeitmarken Verteilte Systeme 8-1 8.1 Einführung
Kap. 8: Globale Zeit / Uhrensynchronisation 81 8.1 Einführung 8.2 Zeitbegriff und Zeitsysteme 83 8.3 Rechneruhren 8.4 Synchronisationsprotokolle 85 8.5 Logische Zeitmarken Verteilte Systeme 8-1 8.1 Einführung
Vorlesung Echtzeitsysteme
 Abb.: Geralt via Pixabay Vorlesung Echtzeitsysteme Thema 2: Zeit Robert Baumgartl 14. März 2015 2 / 57 Ursprung des Zeitbegriffes griechische Vorstellung: Alles ist ein Kreislauf ( kein Ursprung, Ende)
Abb.: Geralt via Pixabay Vorlesung Echtzeitsysteme Thema 2: Zeit Robert Baumgartl 14. März 2015 2 / 57 Ursprung des Zeitbegriffes griechische Vorstellung: Alles ist ein Kreislauf ( kein Ursprung, Ende)
Themen. Vermittlungsschicht. Routing-Algorithmen. IP-Adressierung ARP, RARP, BOOTP, DHCP
 Themen outing-algorithmen IP-Adressierung AP, AP, OOTP, DHCP echnernetze Schicht 3 des OSI-, sowie TCP/IP-Modells Aufgaben: Vermittlung von Paketen von einer Quelle zum Ziel Finden des optimalen Weges
Themen outing-algorithmen IP-Adressierung AP, AP, OOTP, DHCP echnernetze Schicht 3 des OSI-, sowie TCP/IP-Modells Aufgaben: Vermittlung von Paketen von einer Quelle zum Ziel Finden des optimalen Weges
Echtzeitfähige Kommunikation
 Echtzeitfähige Kommunikation Zusammenfassung 373 Zusammenfassung Die Eignung eines Kommunikationsmediums für die Anwendung in n ist vor allem durch das Medienzugriffsverfahren bestimmt. Die maximale Wartezeit
Echtzeitfähige Kommunikation Zusammenfassung 373 Zusammenfassung Die Eignung eines Kommunikationsmediums für die Anwendung in n ist vor allem durch das Medienzugriffsverfahren bestimmt. Die maximale Wartezeit
Lehrgebiet Verteilte und vernetzte Systeme
 Lehrgebiet Verteilte und vernetzte Systeme AG Vernetzte Systeme Prof. Dr. Reinhard Gotzhein AG Verteilte Systeme Prof. Dr. Jens Schmitt AG Integrierte Kommunikationssysteme Prof. Dr. Paul Müller Lehrgebiet
Lehrgebiet Verteilte und vernetzte Systeme AG Vernetzte Systeme Prof. Dr. Reinhard Gotzhein AG Verteilte Systeme Prof. Dr. Jens Schmitt AG Integrierte Kommunikationssysteme Prof. Dr. Paul Müller Lehrgebiet
Projektierung und Betrieb von Rechnernetzen
 Projektierung und Betrieb von Rechnernetzen Versuch : Router-Konfiguration Vorbetrachtungen Im Rahmen des Praktikums sind einige Begriffe bzw. Fragen zum Thema Router zu klären: Was ist ein Router? Router
Projektierung und Betrieb von Rechnernetzen Versuch : Router-Konfiguration Vorbetrachtungen Im Rahmen des Praktikums sind einige Begriffe bzw. Fragen zum Thema Router zu klären: Was ist ein Router? Router
Student: Alexander Carls Matrikelnummer: Aufgabe: Beschreibung des euklidischen Algorithmus Datum:
 Berufsakademie Stuttgart / Außenstelle Horb Studienbereich Technik Studiengang Informationstechnik Kurs IT2006, 2.Semester Dozent: Olaf Herden Student: Alexander Carls Matrikelnummer: 166270 Aufgabe: Beschreibung
Berufsakademie Stuttgart / Außenstelle Horb Studienbereich Technik Studiengang Informationstechnik Kurs IT2006, 2.Semester Dozent: Olaf Herden Student: Alexander Carls Matrikelnummer: 166270 Aufgabe: Beschreibung
Topologieerkennung von Sensornetzwerken
 looz@ira.uka.de Institut für Theoretische Informatik - Algorithmik I 26. Januar 2010 Übersicht Motivation Definitionen Überlegungen Algorithmus Resultate Motivation Definitionen Überlegungen Algorithmus
looz@ira.uka.de Institut für Theoretische Informatik - Algorithmik I 26. Januar 2010 Übersicht Motivation Definitionen Überlegungen Algorithmus Resultate Motivation Definitionen Überlegungen Algorithmus
Algorithmen und Datenstrukturen (ESE) Entwurf, Analyse und Umsetzung von Algorithmen (IEMS) WS 2014 / 2015 Vorlesung 3, Donnerstag 6.
 Entwurf, Analyse und Umsetzung von Algorithmen (IEMS) WS 2014 / 2015 Vorlesung 3, Donnerstag 6.") Algorithmen und Datenstrukturen (ESE) Entwurf, Analyse und Umsetzung von Algorithmen (IEMS) WS 2014 / 2015 Vorlesung 3, Donnerstag 6. November 2014 (O-Notation, Theta, Omega) Junior-Prof. Dr. Olaf Ronneberger
Algorithmen und Datenstrukturen (ESE) Entwurf, Analyse und Umsetzung von Algorithmen (IEMS) WS 2014 / 2015 Vorlesung 3, Donnerstag 6. November 2014 (O-Notation, Theta, Omega) Junior-Prof. Dr. Olaf Ronneberger
Entwicklung eines intelligenten FlexRay-Sternkopplers Paul Milbredt, AUDI AG, 11.05.2010, TU Darmstadt
 Entwicklung eines intelligenten FlexRay-Sternkopplers Paul Milbredt, AUDI AG, 11052010, TU Darmstadt Gliederung Elektronikentwicklung bei Audi Grundlagen Ethernet als Vergleich FlexRay Konzept eines intelligenten
Entwicklung eines intelligenten FlexRay-Sternkopplers Paul Milbredt, AUDI AG, 11052010, TU Darmstadt Gliederung Elektronikentwicklung bei Audi Grundlagen Ethernet als Vergleich FlexRay Konzept eines intelligenten
Das ISO / OSI -7 Schichten Modell
 Begriffe ISO = Das ISO / OSI -7 Schichten Modell International Standardisation Organisation Dachorganisation der Normungsverbände OSI Model = Open Systems Interconnection Model Modell für die Architektur
Begriffe ISO = Das ISO / OSI -7 Schichten Modell International Standardisation Organisation Dachorganisation der Normungsverbände OSI Model = Open Systems Interconnection Model Modell für die Architektur
Der IEEE 1588 Standard
 Der IEEE 1588 Standard Der IEEE 1588 Standard Zeitsynchronisation zwischen mehreren Rechnern im Netzwerk war schon immer eine Herausforderung. Was sich im ersten Schritt als eine triviale Anforderung darstellt,
Der IEEE 1588 Standard Der IEEE 1588 Standard Zeitsynchronisation zwischen mehreren Rechnern im Netzwerk war schon immer eine Herausforderung. Was sich im ersten Schritt als eine triviale Anforderung darstellt,
Der IEEE 1588 Standard
 Der IEEE 1588 Standard Der IEEE 1588 Standard Zeitsynchronisation zwischen mehreren Rechnern im Netzwerk war schon immer eine Herausforderung. Was sich im ersten Schritt als eine triviale Anforderung darstellt,
Der IEEE 1588 Standard Der IEEE 1588 Standard Zeitsynchronisation zwischen mehreren Rechnern im Netzwerk war schon immer eine Herausforderung. Was sich im ersten Schritt als eine triviale Anforderung darstellt,
Definition Message Authentication Code (MAC) Ein Message Authentication Code (MAC) bzgl. des Nachrichtenraumen M besteht aus den ppt Alg.
 Ein Message Authentication Code (MAC) bzgl. des Nachrichtenraumen M besteht aus den ppt Alg.") Message Authentication Code (MAC) Szenario: Integrität und Authentizität mittels MACs. Alice und Bob besitzen gemeinsamen Schlüssel k. Alice berechnet für m einen MAC-Tag t als Funktion von m und k. Alice
Message Authentication Code (MAC) Szenario: Integrität und Authentizität mittels MACs. Alice und Bob besitzen gemeinsamen Schlüssel k. Alice berechnet für m einen MAC-Tag t als Funktion von m und k. Alice
Netzwerktechnologie 2 Sommersemester 2004
 Netzwerktechnologie 2 Sommersemester 2004 FH-Prof. Dipl.-Ing. Dr. Gerhard Jahn Gerhard.Jahn@fh-hagenberg.at Fachhochschulstudiengänge Software Engineering Software Engineering für Medizin Software Engineering
Netzwerktechnologie 2 Sommersemester 2004 FH-Prof. Dipl.-Ing. Dr. Gerhard Jahn Gerhard.Jahn@fh-hagenberg.at Fachhochschulstudiengänge Software Engineering Software Engineering für Medizin Software Engineering
Zeit als Mittel der Reihenfolgebestimmung. Zeit als Mittel der Reihenfolgebestimmung. als Mittel der Reihenfolgebestimmung
 Zeit als Mittel der Reihenfolgebestimmung eme der Uhrensynchronisation che Uhren Lamport Notwendigkeit von Uhrensynchronisation Zeit als Mittel der Reihenfolgebestimmung VektoruhrenProbleme der Uhrensynchronisation
Zeit als Mittel der Reihenfolgebestimmung eme der Uhrensynchronisation che Uhren Lamport Notwendigkeit von Uhrensynchronisation Zeit als Mittel der Reihenfolgebestimmung VektoruhrenProbleme der Uhrensynchronisation
5 Verteilte Algorithmen. vs5 1
 5 Verteilte Algorithmen vs5 1 Charakterisierung eines verteilten Systems? Prozesse als Systemkomponenten: Spezifikation eines Prozesses (Vgl. Spezifikation eines ADT) syntaktisch: z.b. Ports oder Parameter
5 Verteilte Algorithmen vs5 1 Charakterisierung eines verteilten Systems? Prozesse als Systemkomponenten: Spezifikation eines Prozesses (Vgl. Spezifikation eines ADT) syntaktisch: z.b. Ports oder Parameter
Ausarbeitung eines Praktikumsversuches zum Design eines 1-Wire-Master-Controllers Falk Niederlein
 Großer Beleg Ausarbeitung eines Praktikumsversuches zum Design eines 1-Wire-Master-Controllers Falk Niederlein Folie 1 Gliederung 1 Allgemein 2 Architektur 3 1-Wire-Protokoll 4 Praktikumsversuch 5 Zusammenfassung
Großer Beleg Ausarbeitung eines Praktikumsversuches zum Design eines 1-Wire-Master-Controllers Falk Niederlein Folie 1 Gliederung 1 Allgemein 2 Architektur 3 1-Wire-Protokoll 4 Praktikumsversuch 5 Zusammenfassung
Zeit-und Frequenzstandards. Nick Rothbart
 Zeit-und Frequenzstandards Nick Rothbart 1 Gliederung Einleitung Klassische Cäsium-Atomuhr Cäsium-Fontäne 2 Einleitung Was ist Zeit? Zeit ist, was verhindert, dass alles auf einmal passiert! John A. Wheeler
Zeit-und Frequenzstandards Nick Rothbart 1 Gliederung Einleitung Klassische Cäsium-Atomuhr Cäsium-Fontäne 2 Einleitung Was ist Zeit? Zeit ist, was verhindert, dass alles auf einmal passiert! John A. Wheeler
Vorlesung. Rechnernetze II Teil 13. Sommersemester 2004
 Vorlesung Rechnernetze II Teil 13 Sommersemester 2004 Christian Grimm Fachgebiet Distributed Virtual Reality (DVR) Lehrgebiet Rechnernetze C. Grimm 14. Juli 2004 Übersicht Motivation und Beispiele Zeiteinheit
Vorlesung Rechnernetze II Teil 13 Sommersemester 2004 Christian Grimm Fachgebiet Distributed Virtual Reality (DVR) Lehrgebiet Rechnernetze C. Grimm 14. Juli 2004 Übersicht Motivation und Beispiele Zeiteinheit
Verteilte Systeme Kapitel 7: Synchronisation
 Verteilte Systeme Kapitel 7: Synchronisation Prof. Dr. Stefan Fischer Institut für Telematik, Universität zu Lübeck http://www.itm.uni-luebeck.de/people/fischer Inhaltsüberblick der Vorlesung 1. Einführung
Verteilte Systeme Kapitel 7: Synchronisation Prof. Dr. Stefan Fischer Institut für Telematik, Universität zu Lübeck http://www.itm.uni-luebeck.de/people/fischer Inhaltsüberblick der Vorlesung 1. Einführung
Industriefunkuhren. Technische Beschreibung. 6875LAN-7270 GPS Hutschienen TimeServer für NTP / SINEC H1
 Industriefunkuhren Technische Beschreibung 6875LAN-7270 GPS Hutschienen TimeServer für NTP / SINEC H1 mit AC-Weitbereichsnetzteil zwei unabhängige serielle Schnittstellen DCF77 Antennensimulation IRIG-B
Industriefunkuhren Technische Beschreibung 6875LAN-7270 GPS Hutschienen TimeServer für NTP / SINEC H1 mit AC-Weitbereichsnetzteil zwei unabhängige serielle Schnittstellen DCF77 Antennensimulation IRIG-B
56. UKW Tagung Weinheim 2011 Zeitsynchronisation mit NTP (Network Time Protocol)
") (Network Time Protocol) Warum NTP? Grundlagen von NTP Netzarchitektur Zeitserver (Einzelsystem, Pool) Clientkonfiguration UNIX / Linux Clientkonfiguration Windows Literaturquellen Diskussion Referent:
(Network Time Protocol) Warum NTP? Grundlagen von NTP Netzarchitektur Zeitserver (Einzelsystem, Pool) Clientkonfiguration UNIX / Linux Clientkonfiguration Windows Literaturquellen Diskussion Referent:
Aufbau und Wirkungsweise
 19.12.2016 Router Aufbau und Wirkungsweise Sebastian Takats 1AHWIL Inhalt 1. Allgemeines... 3 2. Aufgaben... 3 3. Aufbau... 3 4. Funktion... 4 4.1 Routenwahlmethoden... 4 4.1.1 LSA Link-Status-Algorithmus...
19.12.2016 Router Aufbau und Wirkungsweise Sebastian Takats 1AHWIL Inhalt 1. Allgemeines... 3 2. Aufgaben... 3 3. Aufbau... 3 4. Funktion... 4 4.1 Routenwahlmethoden... 4 4.1.1 LSA Link-Status-Algorithmus...
Adressauflösung. IP Adresse Physikalische Adresse 128.96.34.1 57:FF:AA:36:AB:11 128.96.34.16 85:48:A4:28:AA:18
 Adressauflösung IP Adresse Physikalische Adresse 128.96.34.1 57:FF:AA:36:AB:11 128.96.34.16 85:48:A4:28:AA:18 IP Adresse Physikalische Adresse 128.96.34.15??? 128.96.34.16 85:48:A4:28:AA:18 128.96.34.15
Adressauflösung IP Adresse Physikalische Adresse 128.96.34.1 57:FF:AA:36:AB:11 128.96.34.16 85:48:A4:28:AA:18 IP Adresse Physikalische Adresse 128.96.34.15??? 128.96.34.16 85:48:A4:28:AA:18 128.96.34.15
Vorlesung. Rechnernetze II Teil 3. Sommersemester 2006
 Vorlesung Rechnernetze II Teil 3 Sommersemester 2006 Christian Grimm Fachgebiet Distributed Virtual Reality (DVR) Lehrgebiet Rechnernetze C. Grimm 3. Mai 2006 Übersicht Motivation und Beispiele Zeiteinheit
Vorlesung Rechnernetze II Teil 3 Sommersemester 2006 Christian Grimm Fachgebiet Distributed Virtual Reality (DVR) Lehrgebiet Rechnernetze C. Grimm 3. Mai 2006 Übersicht Motivation und Beispiele Zeiteinheit
EIB Zeitsender ZS 600 DCF. theben. EIB Zeitsender ZS 600 DCF. EIB Zeitsender Stand: Sep-14 (Änderungen vorbehalten) Seite 1 von 11
 Seite 1 von 11") EIB Zeitsender ZS 600 DCF EIB Zeitsender 6009200 Stand: Sep-14 (Änderungen vorbehalten) Seite 1 von 11 Inhaltsverzeichnis 1 FUNKTIONSEIGENSCHAFTEN... 3 1.1 Vorteile... 3 1.2 Besonderheiten... 3 2 DAS APPLIKATIONSPROGRAMM
EIB Zeitsender ZS 600 DCF EIB Zeitsender 6009200 Stand: Sep-14 (Änderungen vorbehalten) Seite 1 von 11 Inhaltsverzeichnis 1 FUNKTIONSEIGENSCHAFTEN... 3 1.1 Vorteile... 3 1.2 Besonderheiten... 3 2 DAS APPLIKATIONSPROGRAMM
Verteilte Systeme Prof. Dr. Stefan Fischer. Überblick. Motivation. TU Braunschweig Institut für Betriebssysteme und Rechnerverbund
 TU Braunschweig Institut für Betriebssysteme und Rechnerverbund Kapitel 8: Zeit, Nebenläufigkeit und Synchronisation Überblick Das Phänomen der Zeit in Computersystemen Uhrensynchronisation Christian s
TU Braunschweig Institut für Betriebssysteme und Rechnerverbund Kapitel 8: Zeit, Nebenläufigkeit und Synchronisation Überblick Das Phänomen der Zeit in Computersystemen Uhrensynchronisation Christian s
WS 2009/10. Diskrete Strukturen
 WS 2009/10 Diskrete Strukturen Prof. Dr. J. Esparza Lehrstuhl für Grundlagen der Softwarezuverlässigkeit und theoretische Informatik Fakultät für Informatik Technische Universität München http://www7.in.tum.de/um/courses/ds/ws0910
WS 2009/10 Diskrete Strukturen Prof. Dr. J. Esparza Lehrstuhl für Grundlagen der Softwarezuverlässigkeit und theoretische Informatik Fakultät für Informatik Technische Universität München http://www7.in.tum.de/um/courses/ds/ws0910
Hauptdiplomklausur Informatik März 2001: Internet Protokolle
 Universität Mannheim Fakultät für Mathematik und Informatik Lehrstuhl für Praktische Informatik IV Professor Dr. W. Effelsberg Hauptdiplomklausur Informatik März 200: Internet Protokolle Name:... Vorname:...
Universität Mannheim Fakultät für Mathematik und Informatik Lehrstuhl für Praktische Informatik IV Professor Dr. W. Effelsberg Hauptdiplomklausur Informatik März 200: Internet Protokolle Name:... Vorname:...
Hauptdiplomklausur Informatik Juni 2008: Computer Networks
 Universität Mannheim Fakultät für Mathematik und Informatik Lehrstuhl für Praktische Informatik IV Prof. Dr.-Ing. W. Effelsberg Hauptdiplomklausur Informatik Juni 2008: Computer Networks Name: Matrikel-Nr.:
Universität Mannheim Fakultät für Mathematik und Informatik Lehrstuhl für Praktische Informatik IV Prof. Dr.-Ing. W. Effelsberg Hauptdiplomklausur Informatik Juni 2008: Computer Networks Name: Matrikel-Nr.:
WS 2009/10. Diskrete Strukturen
 WS 2009/10 Diskrete Strukturen Prof. Dr. J. Esparza Lehrstuhl für Grundlagen der Softwarezuverlässigkeit und theoretische Informatik Fakultät für Informatik Technische Universität München http://www7.in.tum.de/um/courses/ds/ws0910
WS 2009/10 Diskrete Strukturen Prof. Dr. J. Esparza Lehrstuhl für Grundlagen der Softwarezuverlässigkeit und theoretische Informatik Fakultät für Informatik Technische Universität München http://www7.in.tum.de/um/courses/ds/ws0910
WARUM FINDET MEIN SMARTPHONE OHNE EINSTEIN SEINEN WEG NICHT?
 WARUM FINDET MEIN SMARTPHONE OHNE EINSTEIN SEINEN WEG NICHT? Jürgen R. Reuter, DESY Science Café, DESY 28.11.2012 ALLTAG: (GPS-)NAVIGATION MIT IPHONE Smartphone enthält GPS- Empfänger Positionsbestimmung
WARUM FINDET MEIN SMARTPHONE OHNE EINSTEIN SEINEN WEG NICHT? Jürgen R. Reuter, DESY Science Café, DESY 28.11.2012 ALLTAG: (GPS-)NAVIGATION MIT IPHONE Smartphone enthält GPS- Empfänger Positionsbestimmung
Netzwerktopologien. Unter Netzwerktopologie versteht man die Art und Weise (Struktur), in der die einzelnen Netzwerkelemente verbunden werden.
, in der die einzelnen Netzwerkelemente verbunden werden.") Netzwerktopologien Folie: 1 Unter Netzwerktopologie versteht man die Art und Weise (Struktur), in der die einzelnen Netzwerkelemente verbunden werden. Unter physikalischer Topologie versteht man die räumliche
Netzwerktopologien Folie: 1 Unter Netzwerktopologie versteht man die Art und Weise (Struktur), in der die einzelnen Netzwerkelemente verbunden werden. Unter physikalischer Topologie versteht man die räumliche
Domänenmodell: Fadenkommunikation und -synchronisation
 Domänenmodell: Fadenkommunikation und -synchronisation Alexander Humphreys, Reinhard Rösch, Fabian Scheler 15. Mai 2003 Inhaltsverzeichnis 1 Domänendefinition 1 2 Domänenlexikon 1 3 Konzeptmodelle 4 4
Domänenmodell: Fadenkommunikation und -synchronisation Alexander Humphreys, Reinhard Rösch, Fabian Scheler 15. Mai 2003 Inhaltsverzeichnis 1 Domänendefinition 1 2 Domänenlexikon 1 3 Konzeptmodelle 4 4
Technische Beschreibung. NTP-Treiber für Windows NT NTP
 Technische Beschreibung NTP-Treiber für Windows NT NTP Version 01.01 04.09.2001 FIRMENINFO Sicherheitshinweise Die Sicherheitsvorschriften und technischen Daten dienen der fehlerfreien Funktion des Gerätes
Technische Beschreibung NTP-Treiber für Windows NT NTP Version 01.01 04.09.2001 FIRMENINFO Sicherheitshinweise Die Sicherheitsvorschriften und technischen Daten dienen der fehlerfreien Funktion des Gerätes
Modell-basierte Entwicklung mit der Timing Definition Language (TDL)
") Modell-basierte Entwicklung mit der Timing Definition Language (TDL) Prof. Dr. Wolfgang Pree Univ. Salzburg Inhalt Motivation für einen Paradigmenwechsel bisher: zuerst Plattform, dann Software => Software
Modell-basierte Entwicklung mit der Timing Definition Language (TDL) Prof. Dr. Wolfgang Pree Univ. Salzburg Inhalt Motivation für einen Paradigmenwechsel bisher: zuerst Plattform, dann Software => Software
Übersicht. Industrial Ethernet für Laborgeräte?
 Industrial Ethernet für Laborgeräte? Übersicht Automatisierungspyramide und Anforderungen Zukünftiger Wandel und Anforderungen Frage: welche Anforderungen überwiegen bei Laborgeräten Überblick über Industrial
Industrial Ethernet für Laborgeräte? Übersicht Automatisierungspyramide und Anforderungen Zukünftiger Wandel und Anforderungen Frage: welche Anforderungen überwiegen bei Laborgeräten Überblick über Industrial
Verfahren zur Skalierung. A. Die "klassische" Vorgehensweise - nach der Logik der klassischen Testtheorie
 Verfahren zur Skalierung A. Die "klassische" Vorgehensweise - nach der Logik der klassischen Testtheorie 1. Daten: z. Bsp. Rating-Skalen, sogenannte "Likert" - Skalen 2. Ziele 1. Eine Skalierung von Items
Verfahren zur Skalierung A. Die "klassische" Vorgehensweise - nach der Logik der klassischen Testtheorie 1. Daten: z. Bsp. Rating-Skalen, sogenannte "Likert" - Skalen 2. Ziele 1. Eine Skalierung von Items