Topologieerkennung von Sensornetzwerken
|
|
|
- Hilko Schubert
- vor 6 Jahren
- Abrufe
Transkript
1 Institut für Theoretische Informatik - Algorithmik I 26. Januar 2010
2 Übersicht Motivation Definitionen Überlegungen Algorithmus Resultate
3 Motivation Definitionen Überlegungen Algorithmus Resultate
4 Grundlagen Problemstellung Extraktion der Topologie eines Sensornetzwerks nur mit Verbindungsinformationen insbesondere ohne festgelegte Anker und ohne Abstandsinformationen
5 Beispiel zugrundeliegendes Paper Connectivity-based Localization of Large Scale Sensor Networks with Complex Shape (Lederer, Wang, Gao, 2008) Topologie ist wichtig Wenn 2% der Sensorknoten eine erhöhte Temperatur melden kann das statisches Rauschen sein Sind diese 2% in Form einer Feuerschneise angeordnet sieht es schon anders aus
6 Existierende Lösungen Bisherige Ansätze lokale Optimierung Multidimensionale Skalierung (MDS) Gummiband-Algorithmus Probleme mit lokaler Optimierung bleibt in lokalen Minima hängen benötigt Abstandsinformationen




7 Existierende Lösungen II Multidimensionale Skalierung Form bleibt ungefähr erhalten Löcher werden vergrößert Rubberband für Routing noch geeignet Form nicht mehr erkennbar
8 Motivation Definitionen Überlegungen Algorithmus Resultate
9 Steifheit Steifheit Ein Graph heißt steif, wenn seine Einbettung in der Ebene nicht kontinuierlich deformiert werden kann, ohne die Kantenlängen zu ändern. Steifheit vs. Nicht-steifheit Abbildung: nicht steif Abbildung: steif
10 Globale Steifheit Globale Steifheit Ein Graph heißt global steif, wenn seine Einbettung in die Ebene eindeutig ist. Steif, aber nicht global steif. = Mehrdeutigkeit durch umklappen möglich. Resultat Globale Steifheit ist entscheidend für die Erkennung der Topologie.
11 Globale Steifheit Globale Steifheit Ein Graph heißt global steif, wenn seine Einbettung in die Ebene eindeutig ist. Steif, aber nicht global steif. = Mehrdeutigkeit durch umklappen möglich. Resultat Globale Steifheit ist entscheidend für die Erkennung der Topologie.
12 Erinnerung: lokale Optimierung Problem Anfälligkeit gegenüber Fehlern durch Umklappen von Teilgraphen.

13 Landmarken Landmarken einzelne Knoten/Punkte an charakteristischen Stellen meist an Rändern eines Graphen/Netzes dienen zur Orientierung werden auch in der Wegfindung verwendet

14 Voronoiregionen Zur Erinnerung Eine Voronoiregion eines Punktes ist der Bereich, der diesem Punkt näher liegt als jedem anderen. Voronoiregionen sind definitionsgemäß überschneidungsfrei
15 Delaunaygraph Definition V = Landmarken Zwei Landmarken sind im Delaunaygraphen durch eine Kante verbunden, wenn ihre Voronoiregionen aneinander angrenzen intuitiver: wenn sie benachbart sind. Voronoiregion Punkt Delaunaydreiecke sind ebenfalls überschneidungsfrei Delaunaydreieck
16 Hop count Definition d(a, B) := Anzahl der nötigen Sprünge zwischen Knoten A und B A B hier: d(a, B) = 3 durch Fluten zu ermitteln erfüllt die Dreiecksungleichung = als Abstandsmaß brauchbar Nebenwirkungen bisher wurde nur der kontinuierliche Fall betrachtet entspräche unendlich dichtem Sensornetz leider real meist nur endliche Mengen an Knoten = Modell wird diskret
17 Voronoigraph Voronoigraph Der Voronoigraph besteht aus jenen Knoten, welche auf der Grenze zwischen 2 Voronoiregionen liegen Unterschied zum kontinuierlichen Modell: Knoten, welche zu mehreren Landmarken die gleiche Entfernung haben = Knoten, welche in mehreren Voronoiregionen enthalten sind
18 Mittelachse Definition Die Mittelachse besteht aus allen Punkten, die zwei nächste Randpunkte haben. Für uns ist nur die innere Mittelachse interessant. Mittelachse Rand
19 ILFS (= inner local feature size) Definition ILFS(p) eines Randpunktes p ist definiert als der Abstand von p zur inneren Mittelachse. Mittelachse I LF S(p) Rand p
20 Motivation Definitionen Überlegungen Algorithmus Resultate
21 Laman-Kriterium Laman-Graph Ein Graph mit n Knoten heißt Laman-Graph, wenn er 2n 3 Kanten enthält jede Knotenteilmenge mit k Knoten höchstens 2k 3 Kanten aufspannt Laman-Kriterium Ein Graph G ist (in 2 Dimensionen) steif genau dann, wenn G einen Laman-Graphen G enthält.
22 Laman-Kriterium Laman-Graph Ein Graph mit n Knoten heißt Laman-Graph, wenn er 2n 3 Kanten enthält jede Knotenteilmenge mit k Knoten höchstens 2k 3 Kanten aufspannt Laman-Kriterium Ein Graph G ist (in 2 Dimensionen) steif genau dann, wenn G einen Laman-Graphen G enthält.


23 Steifheit Laman Voronoigraph zusammenhängend = Delaunaygraph erfüllt das Laman-Kriterium Beweis aus Platzgründen übergangen Zu wenig Landmarken unzusammenhängender Voronoigraph Delanauygraph nicht steif
24 Globale Steifheit Kombinierung Vorherige Folie: Voronoigraph zusammenhängend = Delaunaygraph steif Außerdem: Delaunaydreiecke überschneidungsfrei = keine Mehrdeutigkeit durch Umklappen Was tun bei Degenerierungen (4- oder Mehrecke)? Kein Problem, bereits eindeutig einbettbar. Resultat Damit: Voronoigraph zusammenhängend = Delaunaygraph global steif!
25 Dichte der Landmarken Wir brauchen global steifen Delaunaygraph = zusammenhängenden Voronoigraph = genug Landmarken Wieviele sind genug? Es ist hinreichend, wenn jedem Randpunkt eine Landmarke näher ist als die Mittelachse. = p Rand: d(p, Landmarke) ILFS(p) Die notwendige Anzahl der Landmarken hängt nur von der Form des Sensornetzes ab, nicht von der Anzahl der Knoten!
26 Dichte der Landmarken Wir brauchen global steifen Delaunaygraph = zusammenhängenden Voronoigraph = genug Landmarken Wieviele sind genug? Es ist hinreichend, wenn jedem Randpunkt eine Landmarke näher ist als die Mittelachse. = p Rand: d(p, Landmarke) ILFS(p) Die notwendige Anzahl der Landmarken hängt nur von der Form des Sensornetzes ab, nicht von der Anzahl der Knoten!
27 Dichte der Landmarken Wir brauchen global steifen Delaunaygraph = zusammenhängenden Voronoigraph = genug Landmarken Wieviele sind genug? Es ist hinreichend, wenn jedem Randpunkt eine Landmarke näher ist als die Mittelachse. = p Rand: d(p, Landmarke) ILFS(p) Die notwendige Anzahl der Landmarken hängt nur von der Form des Sensornetzes ab, nicht von der Anzahl der Knoten!
28 Motivation Definitionen Überlegungen Algorithmus Resultate
29 Vorgehen Übersicht 1. Ränder finden 2. innere Mittelachse finden 3. ILFS bestimmen 4. Landmarken wählen 5. Voronoigraphen erzeugen 6. Delaunauygraphen berechnen 7. Einbettung in die Ebene






30 Ränder finden Vorgehen Verwende den Algorithmus aus Boundary Recognition in Sensor Networks by Topological Methods von Wang, Gao und Mitchell. Abriss


31 innere Mittelachsen finden Vorgehen 1. Randknoten beginnen zu fluten 2. Hop count bei jeder Weiterleitung um eins erhöhen 3. = jeder Knoten kennt nächsten Randknoten 4. Knoten mit zwei nächsten Randknoten bilden die Mittelachsen Beim Fluten werden redundante Nachrichten unterdrückt.
32 ILFS berechnen Vorgehen 1. Mittelachse flutet 2. Randknoten p erfahren Distanz zur Mittelachse und damit ILFS(p) Mittelachse I LF S(p) Rand p
33 Landmarken wählen Vorgehen Pro Randknoten p: 1. p wartet eine zufällige Zeit 2. trifft Nachricht über Landmarke ein, erkennt p diese an 3. andernfalls wird p selbst zur Landmarke 4. p unterrichtet alle Randknoten q mit d(p, q) ILFS(p) Resultat Für alle zueinander benachbarten Landmarken A, B gilt: d(a, B) max(ilfs(a), ILFS(B))
34 Voronoigraphen erzeugen Vorgehen Sehr ähnlich dem zum Finden der Mittelachse: 1. Alle Landmarken fluten das Netz mit Nachrichten 2. erhöhe Hop count bei jeder Weiterleitung 3. = jeder Knoten kennt nächste Landmarke 4. damit auch Voronoiregion
35 Delaunaygraphen berechnen Vorgehen Sei k ein Knoten mit zwei nächsten Landmarken A, B = k liegt auf der Grenze der Voronoiregionen somit ein Zeuge dafür, dass A und B benachbart sind füge Kante A, B dem Delaunaygraphen hinzu nimm Hopcount(A, B) als Länge der Kante Einige Probleme, die durch den diskreten Fall auftreten können, vernachlässigen wir hier.
36 Einbettung Vorgehen 1. Wähle ein zufälliges Delaunauy-Dreieck als Anfang 2. Weise diesem Koordinaten zu 3. Konstruiere von diesem aus den Graphen, sodass sich keine Überschneidungen ergeben Relaxation Da der Hop count nur ein recht grobes Entfernungsmaß ist, wird noch ein Mass-Spring-Algorithmus angewendet, um den Fehler zu verteilen.

37 Lokalisierung Vorgehen Nachdem die Landmarken auf die Ebene projiziert wurden und somit Koordinaten erhalten haben, können sich alle anderen Knoten an diesen orientieren und ihre eigene Position ermitteln.
38 Motivation Definitionen Überlegungen Algorithmus Resultate
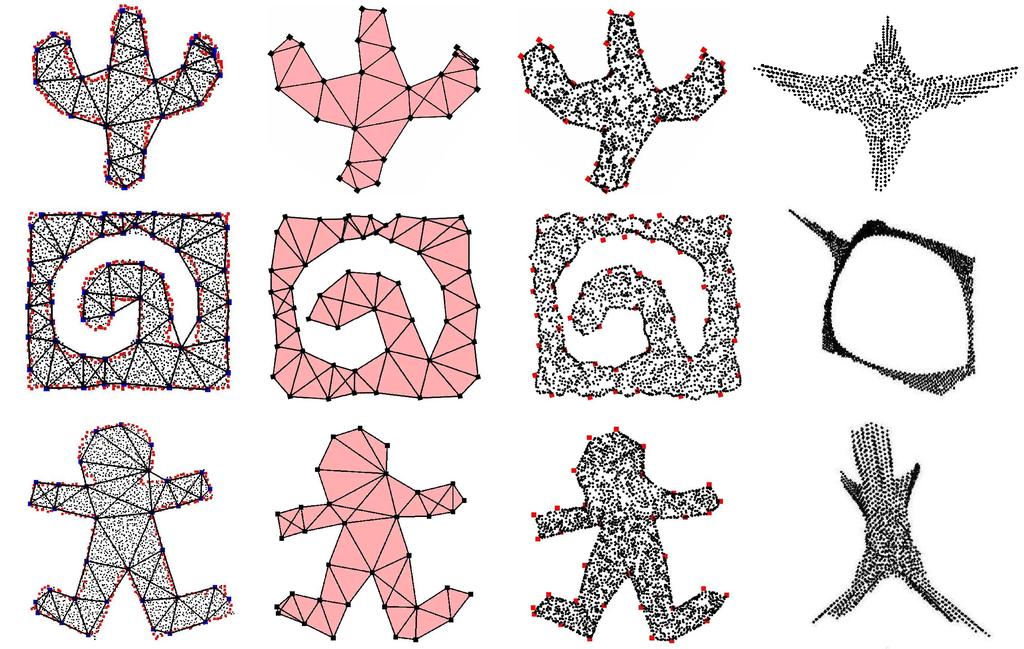
39 Vergleich
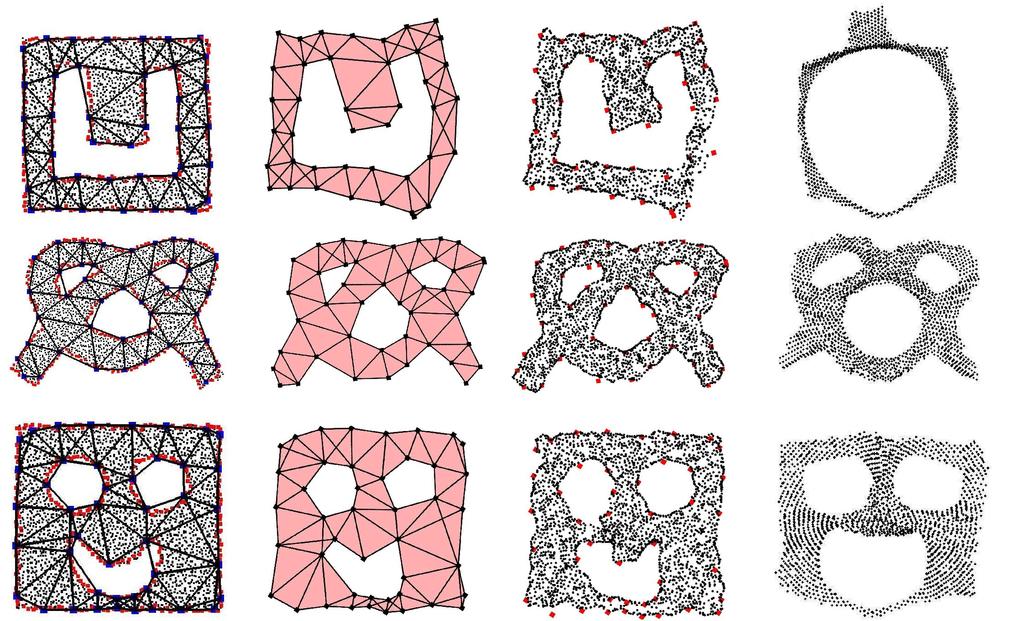
40 Vergleich
41 Zusammenfassung Problemstellung Erkennung der Topologie eines Sensornetzwerks nur mit Verbindungsinformationen Verbreiteter Fehler in vorherigen Ansätzen Verfälschung der Topologie durch Umklappen Entscheidende Idee Erzeugung eines global steifen Graphen = eindeutige Einbettung ohne Umklappfehler
42 Ende Vielen Dank für Ihre Aufmerksamkeit! Fragen?
Lokalisierung von inneren und äußeren Grenzen in Sensornetzwerken
 Lokalisierung von inneren und äußeren Grenzen in Sensornetzwerken Seminararbeit: Algorithmen für Sensornetzwerke Thomas Gramer 1 Thomas Gramer: KIT Universität des Landes Baden-Württemberg und nationales
Lokalisierung von inneren und äußeren Grenzen in Sensornetzwerken Seminararbeit: Algorithmen für Sensornetzwerke Thomas Gramer 1 Thomas Gramer: KIT Universität des Landes Baden-Württemberg und nationales
Navigation anhand natürlicher Landmarken mit Hilfe der Scale Invariant Feature Transform. Thorsten Jost INF-M2 AW1 Sommersemester
 Navigation anhand natürlicher Landmarken mit Hilfe der Scale Invariant Feature Transform Thorsten Jost INF-M2 AW1 Sommersemester 2008 Agenda Motivation Feature Detection Beispiele Posenbestimmung in Räumen
Navigation anhand natürlicher Landmarken mit Hilfe der Scale Invariant Feature Transform Thorsten Jost INF-M2 AW1 Sommersemester 2008 Agenda Motivation Feature Detection Beispiele Posenbestimmung in Räumen
Algorithmen für Sensornetzwerke (Seminar WS09/10)
") Algorithmen für Sensornetzwerke (Seminar WS09/10) Bastian Katz katz@kit.edu Dennis Schieferdecker dennis.schieferdecker@kit.edu Markus Völker markus.voelker@kit.edu GRK 1194: Self-organizing Sensor-Actuator-Networks
Algorithmen für Sensornetzwerke (Seminar WS09/10) Bastian Katz katz@kit.edu Dennis Schieferdecker dennis.schieferdecker@kit.edu Markus Völker markus.voelker@kit.edu GRK 1194: Self-organizing Sensor-Actuator-Networks
Lokalisierung und Topologiekontrolle
 Lokalisierung und Topologiekontrolle Seminar: Kommunikation in drahtlosen Sensornetzwerken Martin Schmidt Einführung Lokalisierung: Für viele Informationen ist die Position wichtig Traditionelle Technik
Lokalisierung und Topologiekontrolle Seminar: Kommunikation in drahtlosen Sensornetzwerken Martin Schmidt Einführung Lokalisierung: Für viele Informationen ist die Position wichtig Traditionelle Technik
Seminar. Visual Computing. Poisson Surface Reconstruction. Peter Hagemann Andreas Meyer. Peter Eisert: Visual Computing SS 11.
 Poisson Surface Reconstruction Peter Hagemann Andreas Meyer Seminar 1 Peter Eisert: SS 11 Motivation Zur 3D Darstellung von Objekten werden meist Scan-Daten erstellt Erstellung eines Dreieckmodells aus
Poisson Surface Reconstruction Peter Hagemann Andreas Meyer Seminar 1 Peter Eisert: SS 11 Motivation Zur 3D Darstellung von Objekten werden meist Scan-Daten erstellt Erstellung eines Dreieckmodells aus
Euklidische Distanzmatrizen. Andrei Grecu
 Euklidische Distanzmatrizen Andrei Grecu Übersicht Motivation Definition und Problemstellung Algo 1: Semidefinite Programmierung Algo 2: Multidimensional Scaling Algo 3: Spring Embedder Algo 4: Genetischer
Euklidische Distanzmatrizen Andrei Grecu Übersicht Motivation Definition und Problemstellung Algo 1: Semidefinite Programmierung Algo 2: Multidimensional Scaling Algo 3: Spring Embedder Algo 4: Genetischer
Routing Algorithmen. Begriffe, Definitionen
 Begriffe, Definitionen Routing (aus der Informatik) Wegewahl oder Verkehrslenkung bezeichnet in der Telekommunikation das Festlegen von Wegen für Nachrichtenströme bei der Nachrichtenübermittlung über
Begriffe, Definitionen Routing (aus der Informatik) Wegewahl oder Verkehrslenkung bezeichnet in der Telekommunikation das Festlegen von Wegen für Nachrichtenströme bei der Nachrichtenübermittlung über
Geometrische Algorithmen
 Geometrische Algorithmen Thomas Röfer Motivation Scan-line-Prinzip Konvexe Hülle Distanzprobleme Voronoi-Diagramm Rückblick Manipulation von Mengen Vorrangwarteschlange Heap HeapSort swap(a, 0, 4) 1 5
Geometrische Algorithmen Thomas Röfer Motivation Scan-line-Prinzip Konvexe Hülle Distanzprobleme Voronoi-Diagramm Rückblick Manipulation von Mengen Vorrangwarteschlange Heap HeapSort swap(a, 0, 4) 1 5
Lernmodul 2 Modelle des Raumes
 Folie 1 von 21 Lernmodul 2 Modelle des Raumes Bildnachweis: www. tagesschau.de Folie 2 von 21 Modelle des Raumes Übersicht Motivation Was ist Raum? Formalismus und Invarianz Metrischer Raum/Euklidischer
Folie 1 von 21 Lernmodul 2 Modelle des Raumes Bildnachweis: www. tagesschau.de Folie 2 von 21 Modelle des Raumes Übersicht Motivation Was ist Raum? Formalismus und Invarianz Metrischer Raum/Euklidischer
11. Übung zu Algorithmen I 6. Juli 2016
 11. Übung zu Algorithmen I 6. Juli 2016 Lisa Kohl lisa.kohl@kit.edu mit Folien von Lukas Barth Roadmap Ausblick: Was sind schwierige Probleme? Travelling Salesman Problem - Reprise ein ILP ein Algorithmus
11. Übung zu Algorithmen I 6. Juli 2016 Lisa Kohl lisa.kohl@kit.edu mit Folien von Lukas Barth Roadmap Ausblick: Was sind schwierige Probleme? Travelling Salesman Problem - Reprise ein ILP ein Algorithmus
Diskrete Mathematik für Informatiker
 Universität Siegen Lehrstuhl Theoretische Informatik Carl Philipp Reh Daniel König Diskrete Mathematik für Informatiker WS 016/017 Übung 7 1. Gegeben sei folgender Graph und das Matching M = {{h, f}, {c,
Universität Siegen Lehrstuhl Theoretische Informatik Carl Philipp Reh Daniel König Diskrete Mathematik für Informatiker WS 016/017 Übung 7 1. Gegeben sei folgender Graph und das Matching M = {{h, f}, {c,
Das Steinerbaumproblem
 Das Steinerbaumproblem Natalie Richert Fakultät für Elektrotechnik, Informatik und Mathematik, Universität Paderborn 4. Februar 008 / 3 Überblick Problembeschreibung Vorstellung von zwei Approimationsalgorithmen
Das Steinerbaumproblem Natalie Richert Fakultät für Elektrotechnik, Informatik und Mathematik, Universität Paderborn 4. Februar 008 / 3 Überblick Problembeschreibung Vorstellung von zwei Approimationsalgorithmen
WS 2009/10. Diskrete Strukturen
 WS 2009/10 Diskrete Strukturen Prof. Dr. J. Esparza Lehrstuhl für Grundlagen der Softwarezuverlässigkeit und theoretische Informatik Fakultät für Informatik Technische Universität München http://www7.in.tum.de/um/courses/ds/ws0910
WS 2009/10 Diskrete Strukturen Prof. Dr. J. Esparza Lehrstuhl für Grundlagen der Softwarezuverlässigkeit und theoretische Informatik Fakultät für Informatik Technische Universität München http://www7.in.tum.de/um/courses/ds/ws0910
WS 2009/10. Diskrete Strukturen
 WS 2009/10 Diskrete Strukturen Prof. Dr. J. Esparza Lehrstuhl für Grundlagen der Softwarezuverlässigkeit und theoretische Informatik Fakultät für Informatik Technische Universität München http://www7.in.tum.de/um/courses/ds/ws0910
WS 2009/10 Diskrete Strukturen Prof. Dr. J. Esparza Lehrstuhl für Grundlagen der Softwarezuverlässigkeit und theoretische Informatik Fakultät für Informatik Technische Universität München http://www7.in.tum.de/um/courses/ds/ws0910
Toleranzbasierte Algorithmen für das Travelling Salesman Problem. Gerold Jäger
 Toleranzbasierte Algorithmen für das Travelling Salesman Problem Gerold Jäger (Zusammenarbeit mit Jop Sibeyn, Boris Goldengorin) Institut für Informatik Martin-Luther-Universität Halle-Wittenberg gerold.jaeger@informatik.uni-halle.de
Toleranzbasierte Algorithmen für das Travelling Salesman Problem Gerold Jäger (Zusammenarbeit mit Jop Sibeyn, Boris Goldengorin) Institut für Informatik Martin-Luther-Universität Halle-Wittenberg gerold.jaeger@informatik.uni-halle.de
Geradenarrangements und Dualität von Punkten und Geraden
 Vorlesung Algorithmische Geometrie von Punkten und Geraden INSTITUT FÜR THEORETISCHE INFORMATIK FAKULTÄT FÜR INFORMATIK Martin Nöllenburg 12.06.2012 Dualitätsabbildung Bisher haben wir Dualität für planare
Vorlesung Algorithmische Geometrie von Punkten und Geraden INSTITUT FÜR THEORETISCHE INFORMATIK FAKULTÄT FÜR INFORMATIK Martin Nöllenburg 12.06.2012 Dualitätsabbildung Bisher haben wir Dualität für planare
WS 2009/10. Diskrete Strukturen
 WS 2009/10 Diskrete Strukturen Prof. Dr. J. Esparza Lehrstuhl für Grundlagen der Softwarezuverlässigkeit und theoretische Informatik Fakultät für Informatik Technische Universität München http://www7.in.tum.de/um/courses/ds/ws0910
WS 2009/10 Diskrete Strukturen Prof. Dr. J. Esparza Lehrstuhl für Grundlagen der Softwarezuverlässigkeit und theoretische Informatik Fakultät für Informatik Technische Universität München http://www7.in.tum.de/um/courses/ds/ws0910
Unendliche Gruppen als geometrische Objekte
 Unendliche Gruppen als geometrische Objekte Ralf Meyer Georg-August-Universität Göttingen 12. November 2004 1 Endlich erzeugte Gruppen und die Wortmetrik Wir definieren endlich erzeugte Gruppen und führen
Unendliche Gruppen als geometrische Objekte Ralf Meyer Georg-August-Universität Göttingen 12. November 2004 1 Endlich erzeugte Gruppen und die Wortmetrik Wir definieren endlich erzeugte Gruppen und führen
Literatur. Dominating Set (DS) Dominating Sets in Sensornetzen. Problem Minimum Dominating Set (MDS)
 Dominating Sets in Sensornetzen. Problem Minimum Dominating Set (MDS)") Dominating Set 59 Literatur Dominating Set Grundlagen 60 Dominating Set (DS) M. V. Marathe, H. Breu, H.B. Hunt III, S. S. Ravi, and D. J. Rosenkrantz: Simple Heuristics for Unit Disk Graphs. Networks 25,
Dominating Set 59 Literatur Dominating Set Grundlagen 60 Dominating Set (DS) M. V. Marathe, H. Breu, H.B. Hunt III, S. S. Ravi, and D. J. Rosenkrantz: Simple Heuristics for Unit Disk Graphs. Networks 25,
Was bisher geschah. 1. Zerlegung in monotone Polygone 2. Triangulierung der monotonen Teilpolygone
 Was bisher geschah Motivation, Beispiele geometrische Objekte im R 2 : Punkt, Gerade, Halbebene, Strecke, Polygon, ebene Zerlegung in Regionen (planare Graphen) maschinelle Repräsentation geometrischer
Was bisher geschah Motivation, Beispiele geometrische Objekte im R 2 : Punkt, Gerade, Halbebene, Strecke, Polygon, ebene Zerlegung in Regionen (planare Graphen) maschinelle Repräsentation geometrischer
Diskrete Strukturen Kapitel 1: Einleitung
 WS 2015/16 Diskrete Strukturen Kapitel 1: Einleitung Hans-Joachim Bungartz Lehrstuhl für wissenschaftliches Rechnen Fakultät für Informatik Technische Universität München http://www5.in.tum.de/wiki/index.php/diskrete_strukturen_-_winter_15
WS 2015/16 Diskrete Strukturen Kapitel 1: Einleitung Hans-Joachim Bungartz Lehrstuhl für wissenschaftliches Rechnen Fakultät für Informatik Technische Universität München http://www5.in.tum.de/wiki/index.php/diskrete_strukturen_-_winter_15
Graphentheorie. Eulersche Graphen. Eulersche Graphen. Eulersche Graphen. Rainer Schrader. 14. November Gliederung.
 Graphentheorie Rainer Schrader Zentrum für Angewandte Informatik Köln 14. November 2007 1 / 22 2 / 22 Gliederung eulersche und semi-eulersche Graphen Charakterisierung eulerscher Graphen Berechnung eines
Graphentheorie Rainer Schrader Zentrum für Angewandte Informatik Köln 14. November 2007 1 / 22 2 / 22 Gliederung eulersche und semi-eulersche Graphen Charakterisierung eulerscher Graphen Berechnung eines
Algorithmen für Ad-hoc- und Sensornetze Nachtrag zu VL 06 Doubling Dimensions
 Algorithmen für Ad-hoc- und Sensornetze Nachtrag zu VL 06 Doubling Dimensions Dr. rer. nat. Bastian Katz 0. Juni 009 (Version vom. Juni 009) Von Kreisen, Kugeln und Bällen Definition In einem metrischen
Algorithmen für Ad-hoc- und Sensornetze Nachtrag zu VL 06 Doubling Dimensions Dr. rer. nat. Bastian Katz 0. Juni 009 (Version vom. Juni 009) Von Kreisen, Kugeln und Bällen Definition In einem metrischen
Teil III: Routing - Inhalt I. Literatur. Geometric Routing. Voraussetzungen. Unit Disk Graph (UDG) Geometric Routing 29
 Geometric Routing 29") 1 29 Teil III: Routing - Inhalt I Literatur Compass & Face Routing Bounded & Adaptive Face Routing Nicht Ω(1) UDG E. Kranakis, H. Singh und Jorge Urrutia: Compass Routing on Geometric Networks. Canadian
1 29 Teil III: Routing - Inhalt I Literatur Compass & Face Routing Bounded & Adaptive Face Routing Nicht Ω(1) UDG E. Kranakis, H. Singh und Jorge Urrutia: Compass Routing on Geometric Networks. Canadian
Vorlesung Algorithmische Geometrie Konvexe Hülle im R 3
 Vorlesung Algorithmische Geometrie Konvexe Hülle im R 3 LEHRSTUHL FÜR ALGORITHMIK I INSTITUT FÜR THEORETISCHE INFORMATIK FAKULTÄT FÜR INFORMATIK Andreas Gemsa 26.06.2012 Prüfung! Termine: 20. Juli 27.
Vorlesung Algorithmische Geometrie Konvexe Hülle im R 3 LEHRSTUHL FÜR ALGORITHMIK I INSTITUT FÜR THEORETISCHE INFORMATIK FAKULTÄT FÜR INFORMATIK Andreas Gemsa 26.06.2012 Prüfung! Termine: 20. Juli 27.
Wie viele Geraden werden von n Punkten aufgespannt?
 Fakultät für Mathematik und Informatik Lehrgebiet Diskrete Mathematik und Optimierung Prof. Dr. Winfried Hochstättler Sommersemester 009 Seminar zur Diskreten Mathematik Ausarbeitung der Fragestellung:
Fakultät für Mathematik und Informatik Lehrgebiet Diskrete Mathematik und Optimierung Prof. Dr. Winfried Hochstättler Sommersemester 009 Seminar zur Diskreten Mathematik Ausarbeitung der Fragestellung:
Isomorphie von Bäumen
 Isomorphie von Bäumen Alexandra Weinberger 23. Dezember 2011 Inhaltsverzeichnis 1 Einige Grundlagen und Definitionen 2 1.1 Bäume................................. 3 1.2 Isomorphie..............................
Isomorphie von Bäumen Alexandra Weinberger 23. Dezember 2011 Inhaltsverzeichnis 1 Einige Grundlagen und Definitionen 2 1.1 Bäume................................. 3 1.2 Isomorphie..............................
Rechnernetze Übung 10. Frank Weinhold Professur VSR Fakultät für Informatik TU Chemnitz Juni 2011
 Rechnernetze Übung 10 rank Weinhold Professur VSR akultät für Informatik TU hemnitz Juni 2011 Das Weiterleiten (Routing) erfüllt die wichtige ufgabe, einzelne Teilstrecken des Kommunikationsnetzes so zu
Rechnernetze Übung 10 rank Weinhold Professur VSR akultät für Informatik TU hemnitz Juni 2011 Das Weiterleiten (Routing) erfüllt die wichtige ufgabe, einzelne Teilstrecken des Kommunikationsnetzes so zu
Wiederholung zu Flüssen
 Universität Konstanz Methoden der Netzwerkanalyse Fachbereich Informatik & Informationswissenschaft SS 2008 Prof. Dr. Ulrik Brandes / Melanie Badent Wiederholung zu Flüssen Wir untersuchen Flüsse in Netzwerken:
Universität Konstanz Methoden der Netzwerkanalyse Fachbereich Informatik & Informationswissenschaft SS 2008 Prof. Dr. Ulrik Brandes / Melanie Badent Wiederholung zu Flüssen Wir untersuchen Flüsse in Netzwerken:
Stefan Schmid TU Berlin & T-Labs, Berlin, Germany. Reduktionen in der Berechenbarkeitstheorie
 Stefan Schmid TU Berlin & T-Labs, Berlin, Germany Reduktionen in der Berechenbarkeitstheorie Problem: Wie komme ich von hier zum Hamburger Hbf? 2 Beispiel P1 Wie komme ich von hier zum Hamburger Hbf? kann
Stefan Schmid TU Berlin & T-Labs, Berlin, Germany Reduktionen in der Berechenbarkeitstheorie Problem: Wie komme ich von hier zum Hamburger Hbf? 2 Beispiel P1 Wie komme ich von hier zum Hamburger Hbf? kann
Das Falten-und-Schneiden Problem
 Das Falten-und-Schneiden Problem Kristian Bredies Uttendorf, 14. Februar 2005 Inhalt Einleitung Origami Das Falten-und-Schneiden Problem Mathematische Analyse Flaches Origami Lokale Eigenschaften Faltbarkeit
Das Falten-und-Schneiden Problem Kristian Bredies Uttendorf, 14. Februar 2005 Inhalt Einleitung Origami Das Falten-und-Schneiden Problem Mathematische Analyse Flaches Origami Lokale Eigenschaften Faltbarkeit
,...) ist eine Folge, deren Glieder der Null beliebig nahe kommen. (iii) Die Folge a n = ( 1) n + 1 n oder (a n) = (0, 3 2, 2 3, 5 4, 4 5
 ist eine Folge, deren Glieder der Null beliebig nahe kommen. (iii) Die Folge a n = ( 1) n + 1 n oder (a n) = (0, 3 2, 2 3, 5 4, 4 5") 3 Folgen 3.1 Definition und Beispiele Eine Abbildung a : Æ Ê heißt (reelle) Zahlenfolge. Statt a(n) schreiben wir kürzer a n und bezeichnen die ganze Folge mit (a n ) n Æ oder einfach (a n ), was aber
3 Folgen 3.1 Definition und Beispiele Eine Abbildung a : Æ Ê heißt (reelle) Zahlenfolge. Statt a(n) schreiben wir kürzer a n und bezeichnen die ganze Folge mit (a n ) n Æ oder einfach (a n ), was aber
Grundbegriffe der Informatik
 Grundbegriffe der Informatik Einheit 11: Graphen Thomas Worsch Karlsruher Institut für Technologie, Fakultät für Informatik Wintersemester 2010/2011 1/59 Graphische Darstellung von Zusammenhängen schon
Grundbegriffe der Informatik Einheit 11: Graphen Thomas Worsch Karlsruher Institut für Technologie, Fakultät für Informatik Wintersemester 2010/2011 1/59 Graphische Darstellung von Zusammenhängen schon
ScatterNetz-Routing. Multihopkommunikation für medizinische Bluetooth ad hoc Netzwerke
 ScatterNetz-Routing Multihopkommunikation für medizinische Bluetooth ad hoc Netzwerke Andreas Kuntz, Moritz Gmelin, Martin Schönegg, Armin Bolz Institut für Biomedizinische Technik, 8. September 2006 Motivation
ScatterNetz-Routing Multihopkommunikation für medizinische Bluetooth ad hoc Netzwerke Andreas Kuntz, Moritz Gmelin, Martin Schönegg, Armin Bolz Institut für Biomedizinische Technik, 8. September 2006 Motivation
Bipartite Graphen. Beispiele
 Bipartite Graphen Ein Graph G = (V, E) heiÿt bipartit (oder paar), wenn die Knotenmenge in zwei disjunkte Teilmengen zerfällt (V = S T mit S T = ), sodass jede Kante einen Knoten aus S mit einem Knoten
Bipartite Graphen Ein Graph G = (V, E) heiÿt bipartit (oder paar), wenn die Knotenmenge in zwei disjunkte Teilmengen zerfällt (V = S T mit S T = ), sodass jede Kante einen Knoten aus S mit einem Knoten
Approximation flächenhaft harmonischer Funktionen mittels bikubisch finiter Elemente
 . Session 6: Theoretische Geodäsie Approximation flächenhaft harmonischer Funktionen mittels bikubisch finiter Elemente 1 Jessica Franken Institut für Geodäsie und Geoinformation Professur für Theoretische
. Session 6: Theoretische Geodäsie Approximation flächenhaft harmonischer Funktionen mittels bikubisch finiter Elemente 1 Jessica Franken Institut für Geodäsie und Geoinformation Professur für Theoretische
Exploration und Klassifikation von BigData
 Exploration und Klassifikation von BigData Inhalt Einführung Daten Data Mining: Vorbereitungen Clustering Konvexe Hülle Fragen Google: Riesige Datenmengen (2009: Prozessieren von 24 Petabytes pro Tag)
Exploration und Klassifikation von BigData Inhalt Einführung Daten Data Mining: Vorbereitungen Clustering Konvexe Hülle Fragen Google: Riesige Datenmengen (2009: Prozessieren von 24 Petabytes pro Tag)
Topologische Aspekte: Eine kurze Zusammenfassung
 Kapitel 1 Topologische Aspekte: Eine kurze Zusammenfassung Wer das erste Knopfloch verfehlt, kommt mit dem Zuknöpfen nicht zu Rande J. W. Goethe In diesem Kapitel bringen wir die Begriffe Umgebung, Konvergenz,
Kapitel 1 Topologische Aspekte: Eine kurze Zusammenfassung Wer das erste Knopfloch verfehlt, kommt mit dem Zuknöpfen nicht zu Rande J. W. Goethe In diesem Kapitel bringen wir die Begriffe Umgebung, Konvergenz,
Topologische Grundbegriffe I. 1 Offene und Abgeschlossene Mengen
 Topologische Grundbegriffe I Vortrag zum Proseminar Analysis, 26.04.2010 Nina Neidhardt und Simon Langer Im Folgenden soll gezeigt werden, dass topologische Konzepte, die uns schon für die Reellen Zahlen
Topologische Grundbegriffe I Vortrag zum Proseminar Analysis, 26.04.2010 Nina Neidhardt und Simon Langer Im Folgenden soll gezeigt werden, dass topologische Konzepte, die uns schon für die Reellen Zahlen
Theoretische Informatik 1
 Theoretische Informatik 1 Nichtdeterminismus David Kappel Institut für Grundlagen der Informationsverarbeitung TU Graz SS 2012 Übersicht Nichtdeterminismus NTM Nichtdeterministische Turingmaschine Die
Theoretische Informatik 1 Nichtdeterminismus David Kappel Institut für Grundlagen der Informationsverarbeitung TU Graz SS 2012 Übersicht Nichtdeterminismus NTM Nichtdeterministische Turingmaschine Die
Bäume und Wälder. Definition 1
 Bäume und Wälder Definition 1 Ein Baum ist ein zusammenhängender, kreisfreier Graph. Ein Wald ist ein Graph, dessen Zusammenhangskomponenten Bäume sind. Ein Knoten v eines Baums mit Grad deg(v) = 1 heißt
Bäume und Wälder Definition 1 Ein Baum ist ein zusammenhängender, kreisfreier Graph. Ein Wald ist ein Graph, dessen Zusammenhangskomponenten Bäume sind. Ein Knoten v eines Baums mit Grad deg(v) = 1 heißt
Formale Grundlagen der Informatik
 Formale Grundlagen der Informatik / 2015 1 Die Elemente einer (endlichen) Menge sollen den Elementen einer zweiten, gleichmächtigen Menge zugeordnet werden Problemstellung Bipartite Graphen Zuordnungsprobleme
Formale Grundlagen der Informatik / 2015 1 Die Elemente einer (endlichen) Menge sollen den Elementen einer zweiten, gleichmächtigen Menge zugeordnet werden Problemstellung Bipartite Graphen Zuordnungsprobleme
Vier Farben reichen! Von farbigen Landkarten und kniffeligen Beweisen. Martin Oellrich. Warum eine Karte? 3. Warum stetige Grenzen?
 Vier Farben reichen! Von farbigen Landkarten und kniffeligen Beweisen Problemstellung Deutsche Bundesländer in vier Farben 4. April 06 Martin Oellrich Warum geht das immer? Gegeben: Karte eines Gebietes
Vier Farben reichen! Von farbigen Landkarten und kniffeligen Beweisen Problemstellung Deutsche Bundesländer in vier Farben 4. April 06 Martin Oellrich Warum geht das immer? Gegeben: Karte eines Gebietes
Fünf-Farben-Satz. Seminar aus reiner Mathematik, WS 13/14. Schweighofer Lukas, November Seite 1
 Der Fünf- Farben-Satz Seminar aus reiner Mathematik, WS 13/14 Schweighofer Lukas, November 2013 Seite 1 Inhaltsverzeichnis Vorwort...3 Graphentheoretische Grundlagen...4 Satz 2 (Eulerscher Polyedersatz)...7
Der Fünf- Farben-Satz Seminar aus reiner Mathematik, WS 13/14 Schweighofer Lukas, November 2013 Seite 1 Inhaltsverzeichnis Vorwort...3 Graphentheoretische Grundlagen...4 Satz 2 (Eulerscher Polyedersatz)...7
Massive Parallelität : Neuronale Netze
 Massive Parallelität : Neuronale Netze PI2 Sommer-Semester 2005 Hans-Dieter Burkhard Massive Parallelität : Neuronale Netze Knoten: Neuronen Neuronen können erregt ( aktiviert ) sein Kanten: Übertragung
Massive Parallelität : Neuronale Netze PI2 Sommer-Semester 2005 Hans-Dieter Burkhard Massive Parallelität : Neuronale Netze Knoten: Neuronen Neuronen können erregt ( aktiviert ) sein Kanten: Übertragung
Diskrete Strukturen Kapitel 2: Grundlagen (Relationen)
") WS 2016/17 Diskrete Strukturen Kapitel 2: Grundlagen (Relationen) Hans-Joachim Bungartz Lehrstuhl für wissenschaftliches Rechnen Fakultät für Informatik Technische Universität München http://www5.in.tum.de/wiki/index.php/diskrete_strukturen_-_winter_16
WS 2016/17 Diskrete Strukturen Kapitel 2: Grundlagen (Relationen) Hans-Joachim Bungartz Lehrstuhl für wissenschaftliches Rechnen Fakultät für Informatik Technische Universität München http://www5.in.tum.de/wiki/index.php/diskrete_strukturen_-_winter_16
Algorithmen II Vorlesung am
 Algorithmen II Vorlesung am 0..0 Minimale Schnitte in Graphen INSTITUT FÜR THEORETISCHE INFORMATIK PROF. DR. DOROTHEA WAGNER KIT Universität des Landes Baden-Württemberg und Algorithmen nationales Forschungszentrum
Algorithmen II Vorlesung am 0..0 Minimale Schnitte in Graphen INSTITUT FÜR THEORETISCHE INFORMATIK PROF. DR. DOROTHEA WAGNER KIT Universität des Landes Baden-Württemberg und Algorithmen nationales Forschungszentrum
Mathematik I. Vorlesung 19. Metrische Räume
 Prof. Dr. H. Brenner Osnabrück WS 2009/2010 Mathematik I Vorlesung 19 Metrische Räume Euklidische Räume besitzen nach Definition ein Skalarprodukt. Darauf aufbauend kann man einfach die Norm eines Vektors
Prof. Dr. H. Brenner Osnabrück WS 2009/2010 Mathematik I Vorlesung 19 Metrische Räume Euklidische Räume besitzen nach Definition ein Skalarprodukt. Darauf aufbauend kann man einfach die Norm eines Vektors
Proseminar Online Algorithmen, Prof. Dr. Rolf Klein
 Proseminar Online Algorithmen, Prof. Dr. Rolf Klein Vortrag von Michael Daumen am 13.12.2000 Thema : Minimum Spanning Tree und 2-Approximation der TSP-Tour Inhalt des Vortrags : 1. genaue Vorstellung des
Proseminar Online Algorithmen, Prof. Dr. Rolf Klein Vortrag von Michael Daumen am 13.12.2000 Thema : Minimum Spanning Tree und 2-Approximation der TSP-Tour Inhalt des Vortrags : 1. genaue Vorstellung des
Networks, Dynamics, and the Small-World Phenomenon
 Seminar aus Data und Web Mining Mining Social and Other Networks Sommersemester 2007 Networks, Dynamics, and the Small-World Phenomenon, Eine kleine Welt? Ein Erlebnis das wahrscheinlich fast jedem schon
Seminar aus Data und Web Mining Mining Social and Other Networks Sommersemester 2007 Networks, Dynamics, and the Small-World Phenomenon, Eine kleine Welt? Ein Erlebnis das wahrscheinlich fast jedem schon
l p h (x) δw(x) dx für alle δw(x).
 δw(x) dx für alle δw(x).") 1.3 Potentielle Energie 5 In der modernen Statik benutzen wir statt dessen einen schwächeren Gleichheitsbegriff. Wir verlangen nur, dass die beiden Streckenlasten bei jeder virtuellen Verrückung dieselbe
1.3 Potentielle Energie 5 In der modernen Statik benutzen wir statt dessen einen schwächeren Gleichheitsbegriff. Wir verlangen nur, dass die beiden Streckenlasten bei jeder virtuellen Verrückung dieselbe
Topologische Räume und stetige Abbildungen Teil 2
 TU Dortmund Mathematik Fakultät Proseminar zur Linearen Algebra Ausarbeitung zum Thema Topologische Räume und stetige Abbildungen Teil 2 Anna Kwasniok Dozent: Prof. Dr. L. Schwachhöfer Vorstellung des
TU Dortmund Mathematik Fakultät Proseminar zur Linearen Algebra Ausarbeitung zum Thema Topologische Räume und stetige Abbildungen Teil 2 Anna Kwasniok Dozent: Prof. Dr. L. Schwachhöfer Vorstellung des
Künstliche Intelligenz Unsicherheit. Stephan Schwiebert WS 2009/2010 Sprachliche Informationsverarbeitung Institut für Linguistik Universität zu Köln
 Künstliche Intelligenz Unsicherheit Stephan Schwiebert WS 2009/2010 Sprachliche Informationsverarbeitung Institut für Linguistik Universität zu Köln Rückblick Agent in der Wumpuswelt konnte Entscheidungen
Künstliche Intelligenz Unsicherheit Stephan Schwiebert WS 2009/2010 Sprachliche Informationsverarbeitung Institut für Linguistik Universität zu Köln Rückblick Agent in der Wumpuswelt konnte Entscheidungen
Dynamische Programmierung. Problemlösungsstrategie der Informatik
 als Problemlösungsstrategie der Informatik und ihre Anwedung in der Diskreten Mathematik und Graphentheorie Fabian Cordt Enisa Metovic Wissenschaftliche Arbeiten und Präsentationen, WS 2010/2011 Gliederung
als Problemlösungsstrategie der Informatik und ihre Anwedung in der Diskreten Mathematik und Graphentheorie Fabian Cordt Enisa Metovic Wissenschaftliche Arbeiten und Präsentationen, WS 2010/2011 Gliederung
Erzeugung zufälliger Graphen und Bayes-Netze
 Erzeugung zufälliger Graphen und Bayes-Netze Proseminar Algorithmen auf Graphen Georg Lukas, IF2000 2002-07-09 E-Mail: georg@op-co.de Folien: http://op-co.de/bayes/ Gliederung 1. Einleitung 2. einfache
Erzeugung zufälliger Graphen und Bayes-Netze Proseminar Algorithmen auf Graphen Georg Lukas, IF2000 2002-07-09 E-Mail: georg@op-co.de Folien: http://op-co.de/bayes/ Gliederung 1. Einleitung 2. einfache
Die Kopplung von Markovketten und die Irrfahrt auf dem Torus
 Die Kopplung von Markovketten und die Irrfahrt auf dem Torus Verena Monschang Vortrag 20.05.20 Dieser Seminarvortrag thematisiert in erster Linie die Kopplung von Markovketten. Zu deren besseren Verständnis
Die Kopplung von Markovketten und die Irrfahrt auf dem Torus Verena Monschang Vortrag 20.05.20 Dieser Seminarvortrag thematisiert in erster Linie die Kopplung von Markovketten. Zu deren besseren Verständnis
Übungsblatt 6. Vorlesung Theoretische Grundlagen der Informatik im WS 16/17
 Institut für Theoretische Informatik Lehrstuhl Prof. Dr. D. Wagner Übungsblatt 6 Vorlesung Theoretische Grundlagen der Informatik im WS 16/17 Ausgabe 22. Dezember 2016 Abgabe 17. Januar 2017, 11:00 Uhr
Institut für Theoretische Informatik Lehrstuhl Prof. Dr. D. Wagner Übungsblatt 6 Vorlesung Theoretische Grundlagen der Informatik im WS 16/17 Ausgabe 22. Dezember 2016 Abgabe 17. Januar 2017, 11:00 Uhr
Datenstrukturen und Algorithmen. Christian Sohler FG Algorithmen & Komplexität
 Datenstrukturen und Algorithmen Christian Sohler FG Algorithmen & Komplexität 1 Clustering: Partitioniere Objektmenge in Gruppen(Cluster), so dass sich Objekte in einer Gruppe ähnlich sind und Objekte
Datenstrukturen und Algorithmen Christian Sohler FG Algorithmen & Komplexität 1 Clustering: Partitioniere Objektmenge in Gruppen(Cluster), so dass sich Objekte in einer Gruppe ähnlich sind und Objekte
Tutorübung zur Vorlesung Grundlagen Rechnernetze und Verteilte Systeme Übungsblatt 7 (3. Juni 7. Juni 2013)
") Technische Universität München Lehrstuhl Informatik VIII Prof Dr-Ing Georg Carle Dipl-Ing Stephan Günther, MSc Nadine Herold, MSc Dipl-Inf Stephan Posselt Tutorübung zur Vorlesung Grundlagen Rechnernetze
Technische Universität München Lehrstuhl Informatik VIII Prof Dr-Ing Georg Carle Dipl-Ing Stephan Günther, MSc Nadine Herold, MSc Dipl-Inf Stephan Posselt Tutorübung zur Vorlesung Grundlagen Rechnernetze
Überblick. TSP Vergleich der Lösungen. Das Travelling Salesman Problem. Nearest-Neighbor Heuristik für TSP
 Kap..1 Heuristiken Kap.. Approximative Algorithmen und Gütegarantien Professor Dr. Lehrstuhl für Algorithm Engineering, LS11 Fakultät für Informatik, TU Dortmund 3. VO DAP SS 008 14. Juli 009 Überblick
Kap..1 Heuristiken Kap.. Approximative Algorithmen und Gütegarantien Professor Dr. Lehrstuhl für Algorithm Engineering, LS11 Fakultät für Informatik, TU Dortmund 3. VO DAP SS 008 14. Juli 009 Überblick
Kap. 7.1 Heuristiken Kap. 7.2 Approximative Algorithmen und Gütegarantien
 Kap. 7.1 Heuristiken Kap. 7.2 Approximative Algorithmen und Gütegarantien Professor Dr. Lehrstuhl für Algorithm Engineering, LS11 Fakultät für Informatik, TU Dortmund 23. VO DAP2 SS 2008 14. Juli 2009
Kap. 7.1 Heuristiken Kap. 7.2 Approximative Algorithmen und Gütegarantien Professor Dr. Lehrstuhl für Algorithm Engineering, LS11 Fakultät für Informatik, TU Dortmund 23. VO DAP2 SS 2008 14. Juli 2009
Mathematik für Anwender II
 Prof. Dr. H. Brenner Osnabrück SS 2012 Mathematik für Anwender II Vorlesung 32 Metrische Räume Euklidische Räume besitzen nach Definition ein Skalarprodukt. Darauf aufbauend kann man einfach die Norm eines
Prof. Dr. H. Brenner Osnabrück SS 2012 Mathematik für Anwender II Vorlesung 32 Metrische Räume Euklidische Räume besitzen nach Definition ein Skalarprodukt. Darauf aufbauend kann man einfach die Norm eines
Teil III. Komplexitätstheorie
 Teil III Komplexitätstheorie 125 / 160 Übersicht Die Klassen P und NP Die Klasse P Die Klassen NP NP-Vollständigkeit NP-Vollständige Probleme Weitere NP-vollständige Probleme 127 / 160 Die Klasse P Ein
Teil III Komplexitätstheorie 125 / 160 Übersicht Die Klassen P und NP Die Klasse P Die Klassen NP NP-Vollständigkeit NP-Vollständige Probleme Weitere NP-vollständige Probleme 127 / 160 Die Klasse P Ein
Geoinformation I Geometr.-topol. Datenstrukturen
 Folie 1 von 23 Geoinformation I Geometr.-topol. Datenstrukturen Folie 2 von 23 Geometr.-topol. Datenstrukturen Übersicht! Überblick/Motivation! Fokus! Geometrisch-topologische Datenstrukturen " Spaghetti
Folie 1 von 23 Geoinformation I Geometr.-topol. Datenstrukturen Folie 2 von 23 Geometr.-topol. Datenstrukturen Übersicht! Überblick/Motivation! Fokus! Geometrisch-topologische Datenstrukturen " Spaghetti
Alexander Kiontke Routing Protokolle
 Überblick: Wieso brauchen Sensornetze eigene Routingprotokolle? Beispiele für Routingprotokolle Energy Aware Routing (EAR Energy Aware Data-Centric Routing (EAD Ad-Hoc On-Demand Distance Vector Routing
Überblick: Wieso brauchen Sensornetze eigene Routingprotokolle? Beispiele für Routingprotokolle Energy Aware Routing (EAR Energy Aware Data-Centric Routing (EAD Ad-Hoc On-Demand Distance Vector Routing
Virtual Coordinates Simulation
 Diploarbeit Virtual Coordinates Siulation Guido Frerker Betreuung: Regina O Dell, Mirja Wattenhofer Prof. Dr. Roger Wattenhofer Distributed Coputing Group Departeent Inforationstechnologie und Elektrotechnik
Diploarbeit Virtual Coordinates Siulation Guido Frerker Betreuung: Regina O Dell, Mirja Wattenhofer Prof. Dr. Roger Wattenhofer Distributed Coputing Group Departeent Inforationstechnologie und Elektrotechnik
Westfählische Wilhelms-Universität. Eulersche Graphen. Autor: Jan-Hendrik Hoffeld
 Westfählische Wilhelms-Universität Eulersche Graphen Autor: 21. Mai 2015 Inhaltsverzeichnis 1 Das Königsberger Brückenproblem 1 2 Eulertouren und Eulersche Graphen 2 3 Auffinden eines eulerschen Zyklus
Westfählische Wilhelms-Universität Eulersche Graphen Autor: 21. Mai 2015 Inhaltsverzeichnis 1 Das Königsberger Brückenproblem 1 2 Eulertouren und Eulersche Graphen 2 3 Auffinden eines eulerschen Zyklus
Institut für Mathematik Geometrie und Lineare Algebra J. Schönenberger-Deuel. Aufgabe 1. Wir geben nur zwei von sehr vielen möglichen Strategien.
 Lösungen Übung 13 Aufgabe 1. Wir geben nur zwei von sehr vielen möglichen Strategien. a) Strategie 1 (nächster Nachbar): Jedes Mal reist der Reisende vom Punkt, wo er gerade ist, zur nächstgelegenen Stadt,
Lösungen Übung 13 Aufgabe 1. Wir geben nur zwei von sehr vielen möglichen Strategien. a) Strategie 1 (nächster Nachbar): Jedes Mal reist der Reisende vom Punkt, wo er gerade ist, zur nächstgelegenen Stadt,
7. Triangulation von einfachen Polygonen
 1 7. Triangulation von einfachen Polygonen 2 Ziel Bessere Laufzeit als O(n log n) durch schnelleres Berechnen der Trapezzerlegung des Polygons. 3 Idee Finde Methode, den Anfangspunkt einer Strecke in der
1 7. Triangulation von einfachen Polygonen 2 Ziel Bessere Laufzeit als O(n log n) durch schnelleres Berechnen der Trapezzerlegung des Polygons. 3 Idee Finde Methode, den Anfangspunkt einer Strecke in der
5. Clusteranalyse. Lernziele: Grundlegende Algorithmen der Clusteranalyse kennen, ihre Eigenschaften
 5. Clusteranalyse Lernziele: Grundlegende Algorithmen der Clusteranalyse kennen, ihre Eigenschaften benennen und anwenden können, einen Test auf das Vorhandensein einer Clusterstruktur kennen, verschiedene
5. Clusteranalyse Lernziele: Grundlegende Algorithmen der Clusteranalyse kennen, ihre Eigenschaften benennen und anwenden können, einen Test auf das Vorhandensein einer Clusterstruktur kennen, verschiedene
Distributed Graph Layout for Sensor Networks
 Distributed Graph Layout for Sensor Networks Ausarbeitung zum Seminar Zeichnen von Graphen (WS04/05) Prof. Dr. Ulrik Brandes Basierend auf dem gleichnamigen Artikel von C. Gotsman und Y. Koren, Proceedings
Distributed Graph Layout for Sensor Networks Ausarbeitung zum Seminar Zeichnen von Graphen (WS04/05) Prof. Dr. Ulrik Brandes Basierend auf dem gleichnamigen Artikel von C. Gotsman und Y. Koren, Proceedings
5. Clusteranalyse Vorbemerkungen. 5. Clusteranalyse. Grundlegende Algorithmen der Clusteranalyse kennen, ihre Eigenschaften
 5. Clusteranalyse Vorbemerkungen 5. Clusteranalyse Lernziele: Grundlegende Algorithmen der Clusteranalyse kennen, ihre Eigenschaften benennen und anwenden können, einen Test auf das Vorhandensein einer
5. Clusteranalyse Vorbemerkungen 5. Clusteranalyse Lernziele: Grundlegende Algorithmen der Clusteranalyse kennen, ihre Eigenschaften benennen und anwenden können, einen Test auf das Vorhandensein einer
9. Kombination von Vektor- und Rasterdaten
 9. Kombination von Vektor- und Rasterdaten 1. Vergleich von Vektor- und Rasterdaten 2. Morphologische Operationen 3. Transformationen des Formats 4. Kombinierte Auswertungen Geo-Informationssysteme 224
9. Kombination von Vektor- und Rasterdaten 1. Vergleich von Vektor- und Rasterdaten 2. Morphologische Operationen 3. Transformationen des Formats 4. Kombinierte Auswertungen Geo-Informationssysteme 224
Themen. Vermittlungsschicht. Routing-Algorithmen. IP-Adressierung ARP, RARP, BOOTP, DHCP
 Themen outing-algorithmen IP-Adressierung AP, AP, OOTP, DHCP echnernetze Schicht 3 des OSI-, sowie TCP/IP-Modells Aufgaben: Vermittlung von Paketen von einer Quelle zum Ziel Finden des optimalen Weges
Themen outing-algorithmen IP-Adressierung AP, AP, OOTP, DHCP echnernetze Schicht 3 des OSI-, sowie TCP/IP-Modells Aufgaben: Vermittlung von Paketen von einer Quelle zum Ziel Finden des optimalen Weges
Beispielbild. Georouting. Jakob Pfender Institut für Informatik
 Beispielbild Georouting Jakob Pfender Institut für Informatik 28. 01. 2010 Einleitung -Geographische Position statt logischer Adresse -Motivation: Verteilte Netze ohne feste Topologie, bewegliche Knoten
Beispielbild Georouting Jakob Pfender Institut für Informatik 28. 01. 2010 Einleitung -Geographische Position statt logischer Adresse -Motivation: Verteilte Netze ohne feste Topologie, bewegliche Knoten
Geometrie 1. Christian Bay Christian Bay Geometrie / 46
 Geometrie 1 Christian Bay 02.07.2013 Christian Bay Geometrie 1 02.07.2013 1 / 46 Inhaltsverzeichnis Grundlagen CCW Polygone Picks Theorem Konvexe Hülle Christian Bay Geometrie 1 02.07.2013 2 / 46 Geometrie
Geometrie 1 Christian Bay 02.07.2013 Christian Bay Geometrie 1 02.07.2013 1 / 46 Inhaltsverzeichnis Grundlagen CCW Polygone Picks Theorem Konvexe Hülle Christian Bay Geometrie 1 02.07.2013 2 / 46 Geometrie
Das Singularitätentheorem von Hawking Teil 2
 Das Singularitätentheorem von Hawking Teil Jakob Hedicke 0.06.06 In diesem Vortrag werden wir den Beweis des Singularitätentheorems von Stephen Hawking vervollständigen. Im letzten Vortrag wurde bereits
Das Singularitätentheorem von Hawking Teil Jakob Hedicke 0.06.06 In diesem Vortrag werden wir den Beweis des Singularitätentheorems von Stephen Hawking vervollständigen. Im letzten Vortrag wurde bereits
Cauchy-Folgen und Kompaktheit. 1 Cauchy-Folgen und Beschränktheit
 Vortrag zum Seminar zur Analysis, 10.05.2010 Michael Engeländer, Jonathan Fell Dieser Vortrag stellt als erstes einige Sätze zu Cauchy-Folgen auf allgemeinen metrischen Räumen vor. Speziell wird auch das
Vortrag zum Seminar zur Analysis, 10.05.2010 Michael Engeländer, Jonathan Fell Dieser Vortrag stellt als erstes einige Sätze zu Cauchy-Folgen auf allgemeinen metrischen Räumen vor. Speziell wird auch das
WS 2008/09. Diskrete Strukturen
 WS 2008/09 Diskrete Strukturen Prof. Dr. J. Esparza Lehrstuhl für Grundlagen der Softwarezuverlässigkeit und theoretische Informatik Fakultät für Informatik Technische Universität München http://www7.in.tum.de/um/courses/ds/ws0809
WS 2008/09 Diskrete Strukturen Prof. Dr. J. Esparza Lehrstuhl für Grundlagen der Softwarezuverlässigkeit und theoretische Informatik Fakultät für Informatik Technische Universität München http://www7.in.tum.de/um/courses/ds/ws0809
Datenstrukturen. einfach verkettete Liste
 einfach verkettete Liste speichert Daten in einer linearen Liste, in der jedes Element auf das nächste Element zeigt Jeder Knoten der Liste enthält beliebige Daten und einen Zeiger auf den nächsten Knoten
einfach verkettete Liste speichert Daten in einer linearen Liste, in der jedes Element auf das nächste Element zeigt Jeder Knoten der Liste enthält beliebige Daten und einen Zeiger auf den nächsten Knoten
Eulerweg, Eulerkreis. Das Königsberger Brückenproblem. Definition 3.1. Ein Weg, der jede Kante von G genau einmal
 3. Kreis- und Wegeprobleme Kapitelübersicht 3. Kreis- und Wegeprobleme Eulerweg, Eulerkreis Charakterisierung von eulerschen Graphen Bestimmung von eulerschen Wegen und Kreisen Hamiltonsche Graphen Definition
3. Kreis- und Wegeprobleme Kapitelübersicht 3. Kreis- und Wegeprobleme Eulerweg, Eulerkreis Charakterisierung von eulerschen Graphen Bestimmung von eulerschen Wegen und Kreisen Hamiltonsche Graphen Definition
Graphentheorie 1. Diskrete Strukturen. Sommersemester Uta Priss ZeLL, Ostfalia. Hausaufgaben Graph-Äquivalenz SetlX
 Graphentheorie 1 Diskrete Strukturen Uta Priss ZeLL, Ostfalia Sommersemester 2016 Diskrete Strukturen Graphentheorie 1 Slide 1/19 Agenda Hausaufgaben Graph-Äquivalenz SetlX Diskrete Strukturen Graphentheorie
Graphentheorie 1 Diskrete Strukturen Uta Priss ZeLL, Ostfalia Sommersemester 2016 Diskrete Strukturen Graphentheorie 1 Slide 1/19 Agenda Hausaufgaben Graph-Äquivalenz SetlX Diskrete Strukturen Graphentheorie
Aufgabe S 1 (4 Punkte)
") Aufgabe S 1 (4 Punkte) In einem regelmäßigen Achteck wird das Dreieck ABC betrachtet, wobei C der Mittelpunkt der Seite ist, die der Seite AB gegenüberliegt Welchen Anteil am Flächeninhalt des Achtecks
Aufgabe S 1 (4 Punkte) In einem regelmäßigen Achteck wird das Dreieck ABC betrachtet, wobei C der Mittelpunkt der Seite ist, die der Seite AB gegenüberliegt Welchen Anteil am Flächeninhalt des Achtecks
8. Modelle für feste Körper
 8. Modelle für feste Körper Modell: Abbild der Realität, welches bestimmte Aspekte der Realität repräsentiert (und andere ausblendet) mathematische Modelle symbolische Modelle Datenmodelle Experimentalmodelle
8. Modelle für feste Körper Modell: Abbild der Realität, welches bestimmte Aspekte der Realität repräsentiert (und andere ausblendet) mathematische Modelle symbolische Modelle Datenmodelle Experimentalmodelle
Algorithmen mit konstantem Platzbedarf: Die Klasse REG
 Algorithmen mit konstantem Platzbedarf: Die Klasse REG Sommerakademie Rot an der Rot AG 1 Wieviel Platz brauchen Algorithmen wirklich? Daniel Alm Institut für Numerische Simulation Universität Bonn August
Algorithmen mit konstantem Platzbedarf: Die Klasse REG Sommerakademie Rot an der Rot AG 1 Wieviel Platz brauchen Algorithmen wirklich? Daniel Alm Institut für Numerische Simulation Universität Bonn August
Beispiellösungen zu Blatt 39
 µathematischer κorrespondenz- zirkel Mathematisches Institut Georg-August-Universität Göttingen Aufgabe 1 Beispiellösungen zu Blatt 9 Zu Ehren des 9. Aufgabenblattes betrachten wir alle Vielfachen der
µathematischer κorrespondenz- zirkel Mathematisches Institut Georg-August-Universität Göttingen Aufgabe 1 Beispiellösungen zu Blatt 9 Zu Ehren des 9. Aufgabenblattes betrachten wir alle Vielfachen der
Algorithmische Methoden zur Netzwerkanalyse Vorlesung 13, Henning Meyerhenke
 Algorithmische Methoden zur Netzwerkanalyse Vorlesung 13, 01.02.2012 Henning Meyerhenke 1 KIT Henning Universität desmeyerhenke: Landes Baden-Württemberg und nationales Algorithmische Forschungszentrum
Algorithmische Methoden zur Netzwerkanalyse Vorlesung 13, 01.02.2012 Henning Meyerhenke 1 KIT Henning Universität desmeyerhenke: Landes Baden-Württemberg und nationales Algorithmische Forschungszentrum
Kapitel 7: Flüsse in Netzwerken und Anwendungen Gliederung der Vorlesung
 Gliederung der Vorlesung. Fallstudie Bipartite Graphen. Grundbegriffe. Elementare Graphalgorithmen und Anwendungen. Minimal spannende Bäume. Kürzeste Pfade. Traveling Salesman Problem. Flüsse in Netzwerken
Gliederung der Vorlesung. Fallstudie Bipartite Graphen. Grundbegriffe. Elementare Graphalgorithmen und Anwendungen. Minimal spannende Bäume. Kürzeste Pfade. Traveling Salesman Problem. Flüsse in Netzwerken
ADS: Algorithmen und Datenstrukturen 2
 ADS: Algorithmen und Datenstrukturen 2 Teil 5 Prof. Peter F. Stadler & Dr. Christian Höner zu Siederdissen Bioinformatik/IZBI Institut für Informatik & Interdisziplinäres Zentrum für Bioinformatik Universität
ADS: Algorithmen und Datenstrukturen 2 Teil 5 Prof. Peter F. Stadler & Dr. Christian Höner zu Siederdissen Bioinformatik/IZBI Institut für Informatik & Interdisziplinäres Zentrum für Bioinformatik Universität
23. November Betweenness Centrality Closeness Centrality. H. Meyerhenke: Algorithmische Methoden zur Netzwerkanalyse 108
 23. November 2011 Betweenness Centrality Closeness Centrality H. Meyerhenke: Algorithmische Methoden zur Netzwerkanalyse 108 Betweenness Centrality Grundlegende Idee: Ein Knoten ist wichtig, wenn er auf
23. November 2011 Betweenness Centrality Closeness Centrality H. Meyerhenke: Algorithmische Methoden zur Netzwerkanalyse 108 Betweenness Centrality Grundlegende Idee: Ein Knoten ist wichtig, wenn er auf
Algorithmen für schwierige Probleme
 Algorithmen für schwierige Probleme Britta Dorn Wintersemester 2011/12 30. November 2011 Wiederholung Baumzerlegung G = (V, E) Eine Baumzerlegung von G ist ein Paar {X i i V T }, T, wobei T Baum mit Knotenmenge
Algorithmen für schwierige Probleme Britta Dorn Wintersemester 2011/12 30. November 2011 Wiederholung Baumzerlegung G = (V, E) Eine Baumzerlegung von G ist ein Paar {X i i V T }, T, wobei T Baum mit Knotenmenge
Partikelschwarmoptimierung für diskrete Probleme
 Partikelschwarmoptimierung für diskrete Probleme Yushan Liu Fakultät für Mathematik TU München 26. Oktober 2014 Ferienakademie im Sarntal - Kurs 1 Moderne Suchmethoden der Informatik: Trends und Potenzial
Partikelschwarmoptimierung für diskrete Probleme Yushan Liu Fakultät für Mathematik TU München 26. Oktober 2014 Ferienakademie im Sarntal - Kurs 1 Moderne Suchmethoden der Informatik: Trends und Potenzial
Gestenerkennung. Yannick Jonetzko Yannick Jonetzko
 30.04.2015 Inhalt Motivation Definition Geste Historie / Anwendungsbereiche Arten der Funktionsweise anhand eines Papers Alternativen Fazit Seite 2 Motivation Human Computer Interaction Gesten sind in
30.04.2015 Inhalt Motivation Definition Geste Historie / Anwendungsbereiche Arten der Funktionsweise anhand eines Papers Alternativen Fazit Seite 2 Motivation Human Computer Interaction Gesten sind in
Elementargeometrie. Prof. Dr. Andreas Meister SS digital von: Frank Lieberknecht
 Prof. Dr. Andreas Meister SS 2004 digital von: Frank Lieberknecht Geplanter Vorlesungsverlauf...1 Graphentheorie...1 Beispiel 1.1: (Königsberger Brückenproblem)... 1 Beispiel 1.2: (GEW - Problem)... 2
Prof. Dr. Andreas Meister SS 2004 digital von: Frank Lieberknecht Geplanter Vorlesungsverlauf...1 Graphentheorie...1 Beispiel 1.1: (Königsberger Brückenproblem)... 1 Beispiel 1.2: (GEW - Problem)... 2
4.7 Der Algorithmus von Dinic für maximalen Fluss
 4.7 Der Algorithmus von Dinic für maximalen Fluss Wir kennen bereits den Algorithmus von Ford Fulkerson zur Suche nach einem maximalen Fluss in einem Graphen. Wir lernen nun einen Algorithmus für maximalen
4.7 Der Algorithmus von Dinic für maximalen Fluss Wir kennen bereits den Algorithmus von Ford Fulkerson zur Suche nach einem maximalen Fluss in einem Graphen. Wir lernen nun einen Algorithmus für maximalen
f h c 7 a 1 b 1 g 2 2 d
 ) Man bestimme mit Hilfe des Dijkstra-Algorithmus einen kürzesten Weg von a nach h: c 7 a b f 5 h 3 4 5 i e 6 g 2 2 d Beim Dijkstra-Algorithmus wird in jedem Schritt von den noch unmarkierten Knoten jener
) Man bestimme mit Hilfe des Dijkstra-Algorithmus einen kürzesten Weg von a nach h: c 7 a b f 5 h 3 4 5 i e 6 g 2 2 d Beim Dijkstra-Algorithmus wird in jedem Schritt von den noch unmarkierten Knoten jener
Definition Ein gerichteter Graph G = (V, E) ist ein Graph von geordneten Paaren (u, v) mit u V und v V.
 ist ein Graph von geordneten Paaren (u, v) mit u V und v V.") Kapitel 4 Graphenalgorithmen 4.1 Definitionen Definition 4.1.1. Der Graph G = (V, E) ist über die beiden Mengen V und E definiert, wobei V die Menge der Knoten und E die Menge der Kanten in dem Graph ist.
Kapitel 4 Graphenalgorithmen 4.1 Definitionen Definition 4.1.1. Der Graph G = (V, E) ist über die beiden Mengen V und E definiert, wobei V die Menge der Knoten und E die Menge der Kanten in dem Graph ist.
Terrain-Rendering mit Geometry Clipmaps
 Vorarbeiten & Grundlagen Basiskomponenten Der Clipmap-Algorithmus Terrain-Rendering mit Seminar Computergrak 2010 Vorarbeiten & Grundlagen Basiskomponenten Der Clipmap-Algorithmus Worum geht's? Algorithmus
Vorarbeiten & Grundlagen Basiskomponenten Der Clipmap-Algorithmus Terrain-Rendering mit Seminar Computergrak 2010 Vorarbeiten & Grundlagen Basiskomponenten Der Clipmap-Algorithmus Worum geht's? Algorithmus
Minimal spannende Bäume
 http://www.uni-magdeburg.de/harbich/ Minimal spannende Fakultät für Informatik Otto-von-Guericke-Universität 2 Inhalt Definition Wege Untergraphen Kantengewichtete Graphen Minimal spannende Algorithmen
http://www.uni-magdeburg.de/harbich/ Minimal spannende Fakultät für Informatik Otto-von-Guericke-Universität 2 Inhalt Definition Wege Untergraphen Kantengewichtete Graphen Minimal spannende Algorithmen
Motivation Kenngrößen von Graphen Modelle. Small Worlds. in Vorlesung Semantische Suche in P2P-Netzwerken. Florian Holz
 Small Worlds in Vorlesung Florian Holz 14.06.2005 in Vorlesung Small Worlds Florian Holz bekannte Arten der Vernetzung zur Zusammenarbeit (Graphen) regelmäßige, z.b. parallele Hardwarestrukturen vollständige
Small Worlds in Vorlesung Florian Holz 14.06.2005 in Vorlesung Small Worlds Florian Holz bekannte Arten der Vernetzung zur Zusammenarbeit (Graphen) regelmäßige, z.b. parallele Hardwarestrukturen vollständige