4. Kapitel 3D Engine Geometry
|
|
|
- Hertha Richter
- vor 10 Jahren
- Abrufe
Transkript
1 Mathematics for 3D Game Programming & Computer Graphics 4. Kapitel 3D Engine Geometry Anne Adams & Katharina Schmitt Universität Trier Fachbereich IV Proseminar Numerik Wintersemester 2007/08 Prof. Schulz

2 : 4. Kapitel 3D Engine Geometry Gliederung 4.1 Geraden im 3D-Raum 4.2 Ebenen im 3D-Raum 4.3 Der View Frustum 4.4 Perspektivisch-korrekte Interpolation 4.5 Projektionen 2

3 4.1 Geraden im 3D- Raum 4.1 Geraden im 3D-Raum Eine Gerade durch den Punkt S in Richtung V ist definiert durch: P(t) = S + tv mit t Für S = P1 und V = P2 P1 und t [0,1] gilt: P(t) = (1-t)P1 + tp2, wobei dies der Strecke zwischen den Punkten P1 und P2 entspricht. 3
 = (1-t)P1 + tp2, wobei dies der Strecke")
4 4.1 Geraden im 3D- Raum Abstand zwischen Punkt und Gerade 4

5 4.1 Geraden im 3D- Raum Abstand zwischen zwei Geraden 5

6 Beweis: 4.1 Geraden im 3D- Raum Partielle Ableitungen: Matrixschreibweise: 6

7 Ergebnis: 4.1 Geraden im 3D- Raum Werte für t1 und t2 wieder in f(t1,t2) einsetzen, Wurzel ziehen Abstand der beiden Geraden i) =0 Geraden sind parallel ii) iii) Ist f(t1,t2)=0 Schnittpunkt Sonst Geraden sind windschief 7
 =0 Geraden sind parallel ii) iii) Ist")
8 4.2 Ebenen im 3D- Raum 4.2 Ebenen im 3D-Raum Ebenengleichung ist gegeben durch: N*(Q-P)=0 Andere Darstellungsform: Ax + By + Cz + D = 0, mit (A, B, C) = N und D= -N*P 8

9 4.2 Ebenen im 3D- Raum gibt den Abstand von der Ebene zu einer parallelen Ebene, die durch den Ursprung geht, wieder d = N*Q + D; d ist, wenn N normiert ist, der Abstand der Ebene zu einem bel. Punkt Q i) d=0, Q liegt in der Ebene ii) d>0, Q liegt auf der pos. Seite der Ebene iii) d<0, Q liegt auf der neg. Seite der Ebene 9
 d=0, Q liegt in der Ebene ii) d>0, Q liegt auf der pos.")
10 4.2 Ebenen im 3D- Raum Ebene kann auch als 4D Vektor aufgefasst werden: <N,D> = (x, y, z, D) <N,D> entspricht N*Q + D = 0, wobei die Gleichung für alle Q, die in der Ebene liegen, erfüllt ist Abstand d = N*Q + D kann man nun auch schreiben als: d = <N,D>*Q (Q liegt in der Ebene wenn d =<N,D>*Q = 0) Beachte: Q muss in einen 4D Vektor umgewandelt werden und erhält dabei die w-koordinate 1. 10
 Beachte: Q muss in einen 4D Vektor umgewandelt werden und erhält dabei die")
11 4.2 Ebenen im 3D- Raum Schnittpunkt Gerade - Ebene Geg.: Gerade: P(t) = S + tv und Ebene: N*Q + D = 0 N*P(t) + D = 0 für t lösen i) N*V = 0 Gerade ist parallel zur Ebene ii) N*S + D = 0 Gerade liegt in der Ebene iii) Sonst t in Geradengleichung einsetzen liefert den Schnittpunkt In 4D: wobei L=<N, D> 11
 Sonst t in Geradengleichung einsetzen liefert den Schnittpunkt In")
12 4.2 Ebenen im 3D- Raum Schnittpunkt dreier Ebenen Drei bel. Ebenen sind gegeben durch: L1=<N1,D1>, L2= <N2,D2>, L3=<N3,D3> L1*Q = 0 L2*Q = 0 Lösen der Gleichungen liefert Q L3*Q = 0 wenn M invertierbar: 12

13 4.2 Ebenen im 3D- Raum Zwei nicht-parallele Ebenen L1 und L2 schneiden sich in einer Geraden Berechnung der Schnittgeraden: Richtungsvektor der Geraden steht senkrecht auf den beiden Normalenvektoren V=N1*N2 Punkt Q der Geraden durch Konstruktion einer Ebene L3 =<V,0> und anschließender Berechnung des Schnittpunktes der drei Ebenen: P(t)= Q+tV 13
= Q+tV")
14 4.3 Der View Frustum 4.3 Der View Frustum View Frustum entspricht dem, was eine Kamera sehen würde, wenn sie durch ein Fenster schaut Camera space (= eye space) ist das Koordinatensystem mit Kamera im Ursprung, die y-achse zeigt nach oben, die x-achse nach rechts und die z-achse (in OpenGL) entgegen der Kamerablickrichtung 14

15 4.3 Der View Frustum Sichtfeld Projektionsebene: Ebene, parallel zur near/far plane, die im Abstand e (Brennweite) zur Kamera liegt und vom view frustum bei fest vorgegebenen x- und y-koordinaten geschnitten wird Horizontales Sichtfeld: α: horizontaler Sichtfeld-Winkel 15

16 4.3 Der View Frustum aspect ratio beschreibt das Bildseitenverhältnis eines Bildschirms a:= Höhe/Breite Vertikales Sichtfeld: β: vertikaler Sichtfeld-Winkel 16

17 Anmerkung: 4.3 Der View Frustum Die Normalenvektoren der sechs frustum planes zeigen ins Innere des view frustums. Die right, left, bottom und top planes gehen durch den Ursprung D = 0 Near plane: der Normalenvektor zeigt in Kamerablickrichtung D = -n Far plane: der Normalenvektor zeigt entgegengesetzt zur Kamerablickrichtung D = f 17

18 4.4 Perspektivisch-korrekte Interpolation 4.4 Perspektivisch-korrekte Interpolation Die Eckpunkte von z. B. Dreiecken enthalten neben der Lage auch Informationen über Farben und Textur (sog. Vertexattribute) auch diese Informationen müssen richtig interpoliert werden Damit Texturen nicht verzerrt werden, verläuft die Interpolation bei modernen Grafikkarten nicht linear 18
 auch diese Informationen müssen richtig interpoliert werden Damit Texturen")
19 4.4 Perspektivisch-korrekte Interpolation Tiefeninterpolation 19
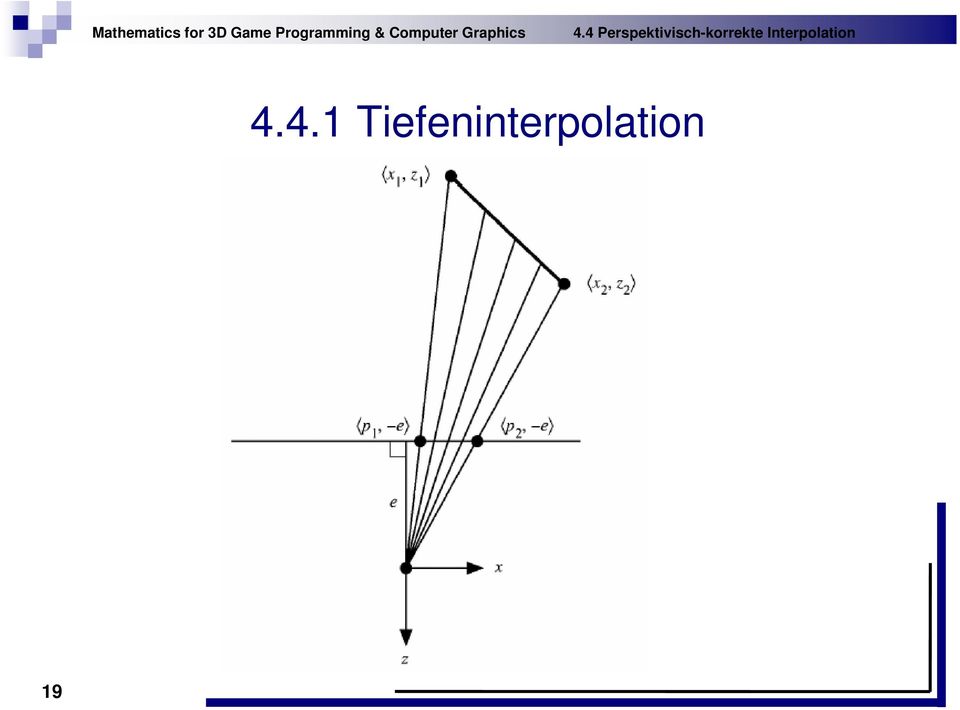
20 4.4 Perspektivisch-korrekte Interpolation Beschreibung der Dreiecksseite als Gerade: ax + bz = c Strahlensatz liefert: p / x = -e / z Geg.: <x1,z1> <x2,z2> Endpunkte der Dreiecksseite <p1,-e> <p2,-e> Schnittpunkte mit projection plane p3=(1-t)p1 + tp2 interpolierte x-koordinate auf der Projektionsebene (t e [0,1]) Ges.: interpolierter Wert von z3 20 Kehrwert der z-koordinate kann linear interpoliert werden
p1 + tp2 interpolierte x-koordinate auf der Projektionsebene (t e [0,1]) Ges.")
21 4.4 Perspektivisch-korrekte Interpolation Vertexattribute-Interpolation Vertexattribute können linear interpoliert werden: Seien z1 und z2 Eckpunkte mit zugeordneten Attributen b1 und b2, b3 ist das interpolierte Attribut zum interpolierten Wert z3 aus und folgt: Grafikprozessoren berechnen zuerst den linear interpolierten Wert 1/z, dann dessen Kehrwert, der dann mit dem linear interpolierten Wert b/z multipliziert wird. 21
22 4.5 Projektionen 4.5 Projektionen Wir wollen die 3D-Szene auf 2D-Bildschirm abbilden es wird eine Gerade vom Ursprung zum Punkt P konstruiert; Schnittpunkt der Gerade mit Projektionsebene liefert das Bild von Punkt P x- und y-koordinaten des Bildpunktes kann man berechnen durch: und für die z-koordinate erhalten wir immer e um sinnvolle Tiefeninformationen zu erhalten erfolgt Umwandlung in homogene 4D-Koordinaten 22
23 4.5 Projektionen 4.5.1Perspektivische Projektionen View frustum wird in homogeneous clip space umgewandelt Homogeneous clip space ist ein Würfel mit dem Ursprung im Mittelpunkt, der auf der x-,y- und z-achse von 1 bis 1 reicht 23
24 Umwandlung der Koordinaten 4.5 Projektionen Geg: normierter Punkt P =(Px,Py,Pz,1) im view frustum die auf die near plane projizierten x- und y- Koordinaten von P sind: und mit und Umwandlung der x-, y- und z-koordinaten durch: 24
25 Herleitung von z : 4.5 Projektionen Geg.: Für z soll folgende Zuordnung gelten: -n -1 und -f 1 und Durch Umformen erhält man: und Dies liefert die Gleichung für z : 25
26 4.5 Projektionen Der Punkt P = <x, y, z > ist äquivalent zum normierten 4D Punkt P = <-x Pz, -y Pz, -z Pz, -Pz > im homogeneous clip space, mit,, Dies liefert uns eine 4x4-Matrix Mfrustum, die einen beliebigen Punkt P aus dem view frustum in einen normierten Punkt P im homogeneous clip space wandelt: 26
27 4.5 Projektionen Spezialfall: MInfinite Es ist möglich, ein view frustum zu konstruieren, bei dem die Tiefe (=f) nicht bekannt ist: Dies erlaubt uns, einen Punkt mit w-koordinate 0 richtig zu übertragen: Q = <Qx,Qy,Qz,0> Minfinite*Q= 27
28 4.5 Projektionen Parallelprojektionen keine perspektivische Verzerrung 28 Da keine perspektivische Verzerrung stattfindet, können die Koordinaten linear interpoliert werden:
29 4.5 Projektionen,, Dies liefert uns die Matrix Mortho: 29
30 4.5 Projektionen Extrahieren der Frustum Planes Umwandlung vom homogeneous clip space zum camera space Geg.: L: Ebene im camera space L : Ebene im homogeneous clip space M: Mfrustum(M ist orthogonal) Die Umwandlung der Ebenen erfolgt also durch folgende Gleichungen: near = M4 + M3 far = M4 - M3 left = M4 + M1 bottom = M4 + M2 right = M4 - M1 top = M4 - M2 30
31 : 4. Kapitel 3D Engine Geometry Quellen: Eric Lengyel: Mathematics for 3D Game Programming & Computer Graphics, 2nd edition, Charles River Media, Inc., Higham, Massachusetts,
32 Vielen Dank für Ihre Aufmerksamkeit!
Welche Lagen können zwei Geraden (im Raum) zueinander haben? Welche Lagen kann eine Gerade bezüglich einer Ebene im Raum einnehmen?
 zueinander haben? Welche Lagen kann eine Gerade bezüglich einer Ebene im Raum einnehmen?") Welche Lagen können zwei Geraden (im Raum) zueinander haben? Welche Lagen können zwei Ebenen (im Raum) zueinander haben? Welche Lagen kann eine Gerade bezüglich einer Ebene im Raum einnehmen? Wie heiÿt
Welche Lagen können zwei Geraden (im Raum) zueinander haben? Welche Lagen können zwei Ebenen (im Raum) zueinander haben? Welche Lagen kann eine Gerade bezüglich einer Ebene im Raum einnehmen? Wie heiÿt
Aufgabe 1. Zunächst wird die allgemeine Tangentengleichung in Abhängigkeit von a aufgestellt:
 Aufgabe 1 1.1. Bestimmung von D max : 1. Bedingung: x >0 ; da ln(x) nur für x > 0 definiert ist. 2. Bedingung: Somit ist die Funktion f a nur für x > 0 definiert und sie besitzt eine Definitionslücke an
Aufgabe 1 1.1. Bestimmung von D max : 1. Bedingung: x >0 ; da ln(x) nur für x > 0 definiert ist. 2. Bedingung: Somit ist die Funktion f a nur für x > 0 definiert und sie besitzt eine Definitionslücke an
www.mathe-aufgaben.com
 Abiturprüfung Mathematik Baden-Württemberg (ohne CAS) Pflichtteil Aufgaben Aufgabe : ( VP) Bilden Sie die erste Ableitung der Funktion f mit sin() f() =. Aufgabe : ( VP) Berechnen Sie das Integral ( )
Abiturprüfung Mathematik Baden-Württemberg (ohne CAS) Pflichtteil Aufgaben Aufgabe : ( VP) Bilden Sie die erste Ableitung der Funktion f mit sin() f() =. Aufgabe : ( VP) Berechnen Sie das Integral ( )
Abituraufgabe zur analytischen Geometrie, Hessen 2013, B2, Grundkurs (TR)
") Abituraufgabe zur analytischen Geometrie, Hessen 2013, B2, Grundkurs (TR) 1 Bei Ausgrabungen wurden die Überreste einer 4500 Jahre alten Pyramide entdeckt. Die Abbildung zeigt die Ansicht der Pyramidenruine
Abituraufgabe zur analytischen Geometrie, Hessen 2013, B2, Grundkurs (TR) 1 Bei Ausgrabungen wurden die Überreste einer 4500 Jahre alten Pyramide entdeckt. Die Abbildung zeigt die Ansicht der Pyramidenruine
2.2 Projektionen und Kameramodelle
 Graphikprog. GRUNDLEGENDE VERFAHREN UND TECHNIKEN. Projektionen und Kameramodelle Nachdem alle Objekte einer Szenerie mittels der besprochenen Transformationen im D-Weltkoordinatensystem platziert sind,
Graphikprog. GRUNDLEGENDE VERFAHREN UND TECHNIKEN. Projektionen und Kameramodelle Nachdem alle Objekte einer Szenerie mittels der besprochenen Transformationen im D-Weltkoordinatensystem platziert sind,
www.mathe-aufgaben.com
 Abiturprüfung Mathematik 008 Baden-Württemberg (ohne CAS) Pflichtteil Aufgaben Aufgabe 1: ( VP) x Gegeben ist die Funktion f mit f(x). x Bilden Sie die Ableitung von f und fassen Sie diese so weit wie
Abiturprüfung Mathematik 008 Baden-Württemberg (ohne CAS) Pflichtteil Aufgaben Aufgabe 1: ( VP) x Gegeben ist die Funktion f mit f(x). x Bilden Sie die Ableitung von f und fassen Sie diese so weit wie
Nachhilfe-Kurs Mathematik Klasse 13 Freie Waldorfschule Mitte
 Nachhilfe-Kurs Mathematik Klasse 13 Freie Waldorfschule Mitte März 2008 Zusammenfassung IB 1. Lagebeziehungen zwischen geometrischen Objekten 1.1 Punkt-Gerade Ein Punkt kann entweder auf einer gegebenen
Nachhilfe-Kurs Mathematik Klasse 13 Freie Waldorfschule Mitte März 2008 Zusammenfassung IB 1. Lagebeziehungen zwischen geometrischen Objekten 1.1 Punkt-Gerade Ein Punkt kann entweder auf einer gegebenen
Nachhilfe-Kurs Mathematik Klasse 13 Freie Waldorfschule Mitte
 Nachhilfe-Kurs Mathematik Klasse 3 Freie Waldorfschule Mitte März 8 Aufgaben zur analytischen Geometrie Musterlösung Gegeben sind die Ebenen E und E sowie die Punkte A und B: E : 4x + y + 3z = 3 E : x
Nachhilfe-Kurs Mathematik Klasse 3 Freie Waldorfschule Mitte März 8 Aufgaben zur analytischen Geometrie Musterlösung Gegeben sind die Ebenen E und E sowie die Punkte A und B: E : 4x + y + 3z = 3 E : x
DAS ABI-PFLICHTTEIL Büchlein
 DAS ABI-PFLICHTTEIL Büchlein für Baden-Württemberg Alle Originalaufgaben Haupttermine 004 0 Ausführlich gerechnete und kommentierte Lösungswege Mit vielen Zusatzhilfen X π Von: Jochen Koppenhöfer und Pascal
DAS ABI-PFLICHTTEIL Büchlein für Baden-Württemberg Alle Originalaufgaben Haupttermine 004 0 Ausführlich gerechnete und kommentierte Lösungswege Mit vielen Zusatzhilfen X π Von: Jochen Koppenhöfer und Pascal
Lineare Gleichungssysteme
 Brückenkurs Mathematik TU Dresden 2015 Lineare Gleichungssysteme Schwerpunkte: Modellbildung geometrische Interpretation Lösungsmethoden Prof. Dr. F. Schuricht TU Dresden, Fachbereich Mathematik auf der
Brückenkurs Mathematik TU Dresden 2015 Lineare Gleichungssysteme Schwerpunkte: Modellbildung geometrische Interpretation Lösungsmethoden Prof. Dr. F. Schuricht TU Dresden, Fachbereich Mathematik auf der
Formelsammlung zur Kreisgleichung
 zur Kreisgleichung Julia Wolters 6. Oktober 2008 Inhaltsverzeichnis 1 Allgemeine Kreisgleichung 2 1.1 Berechnung des Mittelpunktes und Radius am Beispiel..... 3 2 Kreis und Gerade 4 2.1 Sekanten, Tangenten,
zur Kreisgleichung Julia Wolters 6. Oktober 2008 Inhaltsverzeichnis 1 Allgemeine Kreisgleichung 2 1.1 Berechnung des Mittelpunktes und Radius am Beispiel..... 3 2 Kreis und Gerade 4 2.1 Sekanten, Tangenten,
Repetitionsaufgaben: Lineare Funktionen
 Kantonale Fachschaft Mathematik Repetitionsaufgaben: Lineare Funktionen Zusammengestellt von Irina Bayer-Krakvina, KSR Lernziele: - Wissen, was ein Steigungsdreieck einer Geraden ist und wie die Steigungszahl
Kantonale Fachschaft Mathematik Repetitionsaufgaben: Lineare Funktionen Zusammengestellt von Irina Bayer-Krakvina, KSR Lernziele: - Wissen, was ein Steigungsdreieck einer Geraden ist und wie die Steigungszahl
Funktionen (linear, quadratisch)
") Funktionen (linear, quadratisch) 1. Definitionsbereich Bestimme den Definitionsbereich der Funktion f(x) = 16 x 2 2x + 4 2. Umkehrfunktionen Wie lauten die Umkehrfunktionen der folgenden Funktionen? (a)
Funktionen (linear, quadratisch) 1. Definitionsbereich Bestimme den Definitionsbereich der Funktion f(x) = 16 x 2 2x + 4 2. Umkehrfunktionen Wie lauten die Umkehrfunktionen der folgenden Funktionen? (a)
a' c' Aufgabe: Spiegelung an den Dreiecksseiten und Anti-Steinersche Punkte Darij Grinberg
 ufgabe: Spiegelung an den Dreiecksseiten und nti-steinersche Punkte Darij Grinberg Eine durch den Höhenschnittpunkt H eines Dreiecks B gehende Gerade g werde an den Dreiecksseiten B; und B gespiegelt;
ufgabe: Spiegelung an den Dreiecksseiten und nti-steinersche Punkte Darij Grinberg Eine durch den Höhenschnittpunkt H eines Dreiecks B gehende Gerade g werde an den Dreiecksseiten B; und B gespiegelt;
A(3/1/2) B(6/2/2) C(5/9/4) D(1/4/3)
 B(6/2/2) C(5/9/4) D(1/4/3)") Ein Raumviereck ABCD kann eben sein oder aus zwei gegeneinander geneigten Dreiecken bestehen. In einem ebenen Viereck schneiden sich die Diagonalen. Überprüfen Sie, ob die gegebenen Vierecke eben sind.
Ein Raumviereck ABCD kann eben sein oder aus zwei gegeneinander geneigten Dreiecken bestehen. In einem ebenen Viereck schneiden sich die Diagonalen. Überprüfen Sie, ob die gegebenen Vierecke eben sind.
Die Gleichung A x = a hat für A 0 die eindeutig bestimmte Lösung. Für A=0 und a 0 existiert keine Lösung.
 Lineare Gleichungen mit einer Unbekannten Die Grundform der linearen Gleichung mit einer Unbekannten x lautet A x = a Dabei sind A, a reelle Zahlen. Die Gleichung lösen heißt, alle reellen Zahlen anzugeben,
Lineare Gleichungen mit einer Unbekannten Die Grundform der linearen Gleichung mit einer Unbekannten x lautet A x = a Dabei sind A, a reelle Zahlen. Die Gleichung lösen heißt, alle reellen Zahlen anzugeben,
Die Übereckperspektive mit zwei Fluchtpunkten
 Perspektive Perspektive mit zwei Fluchtpunkten (S. 1 von 8) / www.kunstbrowser.de Die Übereckperspektive mit zwei Fluchtpunkten Bei dieser Perspektivart wird der rechtwinklige Körper so auf die Grundebene
Perspektive Perspektive mit zwei Fluchtpunkten (S. 1 von 8) / www.kunstbrowser.de Die Übereckperspektive mit zwei Fluchtpunkten Bei dieser Perspektivart wird der rechtwinklige Körper so auf die Grundebene
13. Lineare DGL höherer Ordnung. Eine DGL heißt von n-ter Ordnung, wenn Ableitungen y, y, y,... bis zur n-ten Ableitung y (n) darin vorkommen.
 darin vorkommen.") 13. Lineare DGL höherer Ordnung. Eine DGL heißt von n-ter Ordnung, wenn Ableitungen y, y, y,... bis zur n-ten Ableitung y (n) darin vorkommen. Sie heißt linear, wenn sie die Form y (n) + a n 1 y (n 1)
13. Lineare DGL höherer Ordnung. Eine DGL heißt von n-ter Ordnung, wenn Ableitungen y, y, y,... bis zur n-ten Ableitung y (n) darin vorkommen. Sie heißt linear, wenn sie die Form y (n) + a n 1 y (n 1)
Wir gehen aus von euklidischen Anschauungsraum bzw. von der euklidischen Zeichenebene. Parallele Geraden schneiden einander nicht.
 2 Ein wenig projektive Geometrie 2.1 Fernpunkte 2.1.1 Projektive Einführung von Fernpunkten Wir gehen aus von euklidischen Anschauungsraum bzw. von der euklidischen Zeichenebene. Parallele Geraden schneiden
2 Ein wenig projektive Geometrie 2.1 Fernpunkte 2.1.1 Projektive Einführung von Fernpunkten Wir gehen aus von euklidischen Anschauungsraum bzw. von der euklidischen Zeichenebene. Parallele Geraden schneiden
6.2 Scan-Konvertierung (Scan Conversion)
") 6.2 Scan-Konvertierung (Scan Conversion) Scan-Konvertierung ist die Rasterung von einfachen Objekten (Geraden, Kreisen, Kurven). Als Ausgabemedium dient meist der Bildschirm, der aus einem Pixelraster
6.2 Scan-Konvertierung (Scan Conversion) Scan-Konvertierung ist die Rasterung von einfachen Objekten (Geraden, Kreisen, Kurven). Als Ausgabemedium dient meist der Bildschirm, der aus einem Pixelraster
Grundregeln der Perspektive und ihre elementargeometrische Herleitung
 Vortrag zu Mathematik, Geometrie und Perspektive von Prof. Dr. Bodo Pareigis am 15.10.2007 im Vorlesungszyklus Naturwissenschaften und Mathematische Wissenschaften im Rahmen des Seniorenstudiums der LMU.
Vortrag zu Mathematik, Geometrie und Perspektive von Prof. Dr. Bodo Pareigis am 15.10.2007 im Vorlesungszyklus Naturwissenschaften und Mathematische Wissenschaften im Rahmen des Seniorenstudiums der LMU.
Lineare Funktionen. 1 Proportionale Funktionen 3 1.1 Definition... 3 1.2 Eigenschaften... 3. 2 Steigungsdreieck 3
 Lineare Funktionen Inhaltsverzeichnis 1 Proportionale Funktionen 3 1.1 Definition............................... 3 1.2 Eigenschaften............................. 3 2 Steigungsdreieck 3 3 Lineare Funktionen
Lineare Funktionen Inhaltsverzeichnis 1 Proportionale Funktionen 3 1.1 Definition............................... 3 1.2 Eigenschaften............................. 3 2 Steigungsdreieck 3 3 Lineare Funktionen
Computer Vision I. Nikos Canterakis. Lehrstuhl für Mustererkennung, Universität Freiburg
 Nikos Canterakis Lehrstuhl für Mustererkennung, Universität Freiburg Gliederung 6 Endliche Kameras Die Lochkamera Die Projektive Kamera Die projektive Kamera Spalten von P Zeilen von P Hauptpunkt und Hauptachse
Nikos Canterakis Lehrstuhl für Mustererkennung, Universität Freiburg Gliederung 6 Endliche Kameras Die Lochkamera Die Projektive Kamera Die projektive Kamera Spalten von P Zeilen von P Hauptpunkt und Hauptachse
Eigenwerte und Eigenvektoren von Matrizen
 Eigenwerte und Eigenvektoren von Matrizen Das Eigenwertproblem Sei A eine quadratische Matrix vom Typ m,m. Die Aufgabe, eine Zahl λ und einen dazugehörigen Vektor x zu finden, damit Ax = λx ist, nennt
Eigenwerte und Eigenvektoren von Matrizen Das Eigenwertproblem Sei A eine quadratische Matrix vom Typ m,m. Die Aufgabe, eine Zahl λ und einen dazugehörigen Vektor x zu finden, damit Ax = λx ist, nennt
3.2 Spiegelungen an zwei Spiegeln
 3 Die Theorie des Spiegelbuches 45 sehen, wenn die Person uns direkt gegenüber steht. Denn dann hat sie eine Drehung um die senkrechte Achse gemacht und dabei links und rechts vertauscht. 3.2 Spiegelungen
3 Die Theorie des Spiegelbuches 45 sehen, wenn die Person uns direkt gegenüber steht. Denn dann hat sie eine Drehung um die senkrechte Achse gemacht und dabei links und rechts vertauscht. 3.2 Spiegelungen
(λ Ri I A+BR)v Ri = 0. Lässt sich umstellen zu
v Ri = 0. Lässt sich umstellen zu") Herleitung der oppenecker-formel (Wiederholung) Für ein System ẋ Ax + Bu (B habe Höchstrang) wird eine Zustandsregelung u x angesetzt. Der geschlossene egelkreis gehorcht der Zustands-Dgl. ẋ (A B)x. Die
Herleitung der oppenecker-formel (Wiederholung) Für ein System ẋ Ax + Bu (B habe Höchstrang) wird eine Zustandsregelung u x angesetzt. Der geschlossene egelkreis gehorcht der Zustands-Dgl. ẋ (A B)x. Die
Tangentengleichung. Wie lautet die Geradengleichung für die Tangente, y T =? Antwort:
 Tangentengleichung Wie Sie wissen, gibt die erste Ableitung einer Funktion deren Steigung an. Betrachtet man eine fest vorgegebene Stelle, gibt f ( ) also die Steigung der Kurve und somit auch die Steigung
Tangentengleichung Wie Sie wissen, gibt die erste Ableitung einer Funktion deren Steigung an. Betrachtet man eine fest vorgegebene Stelle, gibt f ( ) also die Steigung der Kurve und somit auch die Steigung
Elemente der Analysis I Kapitel 2: Einführung II, Gleichungen
 Elemente der Analysis I Kapitel 2: Einführung II, Gleichungen Prof. Dr. Volker Schulz Universität Trier / FB IV / Abt. Mathematik 8. November 2010 http://www.mathematik.uni-trier.de/ schulz/elan-ws1011.html
Elemente der Analysis I Kapitel 2: Einführung II, Gleichungen Prof. Dr. Volker Schulz Universität Trier / FB IV / Abt. Mathematik 8. November 2010 http://www.mathematik.uni-trier.de/ schulz/elan-ws1011.html
Abitur - Grundkurs Mathematik. Sachsen-Anhalt 2002. Gebiet G1 - Analysis
 Abitur - Grundkurs Mathematik Sachsen-Anhalt Gebiet G - Analsis Aufgabe.. Der Graph einer ganzrationalen Funktion f dritten Grades mit einer Funktionsgleichung der Form f a b c d a,b,c,d, R schneidet die
Abitur - Grundkurs Mathematik Sachsen-Anhalt Gebiet G - Analsis Aufgabe.. Der Graph einer ganzrationalen Funktion f dritten Grades mit einer Funktionsgleichung der Form f a b c d a,b,c,d, R schneidet die
Hauptprüfung Abiturprüfung 2014 (ohne CAS) Baden-Württemberg
 Baden-Württemberg") Baden-Württemberg: Abitur 04 Pflichtteil www.mathe-aufgaben.com Hauptprüfung Abiturprüfung 04 (ohne CAS) Baden-Württemberg Pflichtteil Hilfsmittel: keine allgemeinbildende Gymnasien Alexander Schwarz www.mathe-aufgaben.com
Baden-Württemberg: Abitur 04 Pflichtteil www.mathe-aufgaben.com Hauptprüfung Abiturprüfung 04 (ohne CAS) Baden-Württemberg Pflichtteil Hilfsmittel: keine allgemeinbildende Gymnasien Alexander Schwarz www.mathe-aufgaben.com
Lineare Gleichungssysteme
 Lineare Gleichungssysteme 1 Zwei Gleichungen mit zwei Unbekannten Es kommt häufig vor, dass man nicht mit einer Variablen alleine auskommt, um ein Problem zu lösen. Das folgende Beispiel soll dies verdeutlichen
Lineare Gleichungssysteme 1 Zwei Gleichungen mit zwei Unbekannten Es kommt häufig vor, dass man nicht mit einer Variablen alleine auskommt, um ein Problem zu lösen. Das folgende Beispiel soll dies verdeutlichen
Definition und Begriffe
 Merkblatt: Das Dreieck Definition und Begriffe Das Dreieck ist ein Vieleck. In der Ebene ist es die einfachste Figur, die von geraden Linien begrenzt wird. Ecken: Jedes Dreieck hat drei Ecken, die meist
Merkblatt: Das Dreieck Definition und Begriffe Das Dreieck ist ein Vieleck. In der Ebene ist es die einfachste Figur, die von geraden Linien begrenzt wird. Ecken: Jedes Dreieck hat drei Ecken, die meist
Abiturprüfung Mathematik 2008 (Baden-Württemberg) Berufliche Gymnasien ohne TG Analysis, Aufgabe 1
 Berufliche Gymnasien ohne TG Analysis, Aufgabe 1") Abiturprüfung Mathematik (Baden-Württemberg) Berufliche Gymnasien ohne TG Analysis, Aufgabe Für jedes t f t () + t R ist die Funktion f t gegeben durch = mit R. Das Schaubild von f t heißt K t.. (6 Punkte)
Abiturprüfung Mathematik (Baden-Württemberg) Berufliche Gymnasien ohne TG Analysis, Aufgabe Für jedes t f t () + t R ist die Funktion f t gegeben durch = mit R. Das Schaubild von f t heißt K t.. (6 Punkte)
3. Grundlagen der Linearen Programmierung
 3. Grundlagen der linearen Programmierung Inhalt 3. Grundlagen der Linearen Programmierung Lineares Programm Grafische Lösung linearer Programme Normalform Geometrie linearer Programme Basislösungen Operations
3. Grundlagen der linearen Programmierung Inhalt 3. Grundlagen der Linearen Programmierung Lineares Programm Grafische Lösung linearer Programme Normalform Geometrie linearer Programme Basislösungen Operations
Lösungen zur Prüfung 2009: Pflichtbereich
 009 Pflichtbereich Lösungen zur Prüfung 009: Pflichtbereich ufgabe P1: erechnung des lächeninhalts G : ür den lächeninhalt des Dreiecks G gilt (siehe igur 1): G = Man muss also zuerst die Länge G und die
009 Pflichtbereich Lösungen zur Prüfung 009: Pflichtbereich ufgabe P1: erechnung des lächeninhalts G : ür den lächeninhalt des Dreiecks G gilt (siehe igur 1): G = Man muss also zuerst die Länge G und die
( ) als den Punkt mit der gleichen x-koordinate wie A und der
 als den Punkt mit der gleichen x-koordinate wie A und der") ETH-Aufnahmeprüfung Herbst 05 Mathematik I (Analysis) Aufgabe [6 Punkte] Bestimmen Sie den Schnittwinkel α zwischen den Graphen der Funktionen f(x) x 4x + x + 5 und g(x) x x + 5 im Schnittpunkt mit der
ETH-Aufnahmeprüfung Herbst 05 Mathematik I (Analysis) Aufgabe [6 Punkte] Bestimmen Sie den Schnittwinkel α zwischen den Graphen der Funktionen f(x) x 4x + x + 5 und g(x) x x + 5 im Schnittpunkt mit der
Lineare Gleichungssysteme
 Lineare Gleichungssysteme Sei K ein Körper, a ij K für 1 i m, 1 j n. Weiters seien b 1,..., b m K. Dann heißt a 11 x 1 + a 12 x 2 +... + a 1n x n = b 1 a 21 x 1 + a 22 x 2 +... + a 2n x n = b 2... a m1
Lineare Gleichungssysteme Sei K ein Körper, a ij K für 1 i m, 1 j n. Weiters seien b 1,..., b m K. Dann heißt a 11 x 1 + a 12 x 2 +... + a 1n x n = b 1 a 21 x 1 + a 22 x 2 +... + a 2n x n = b 2... a m1
Theoretische Grundlagen der Informatik WS 09/10
 Theoretische Grundlagen der Informatik WS 09/10 - Tutorium 6 - Michael Kirsten und Kai Wallisch Sitzung 13 02.02.2010 Inhaltsverzeichnis 1 Formeln zur Berechnung Aufgabe 1 2 Hamming-Distanz Aufgabe 2 3
Theoretische Grundlagen der Informatik WS 09/10 - Tutorium 6 - Michael Kirsten und Kai Wallisch Sitzung 13 02.02.2010 Inhaltsverzeichnis 1 Formeln zur Berechnung Aufgabe 1 2 Hamming-Distanz Aufgabe 2 3
0, v 6 = 2 2. 1, v 4 = 1. 2. span(v 1, v 5, v 6 ) = span(v 1, v 2, v 3, v 4, v 5, v 6 ) 4. span(v 1, v 2, v 4 ) = span(v 2, v 3, v 5, v 6 )
 = span(v 1, v 2, v 3, v 4, v 5, v 6 ) 4. span(v 1, v 2, v 4 ) = span(v 2, v 3, v 5, v 6 )") Aufgabe 65. Ganz schön span(n)end. Gegeben sei folgende Menge M von 6 Vektoren v, v,..., v 6 R 4 aus Aufgabe P 6: M = v =, v =, v =, v 4 =, v 5 =, v 6 = Welche der folgenden Aussagen sind wahr? span(v,
Aufgabe 65. Ganz schön span(n)end. Gegeben sei folgende Menge M von 6 Vektoren v, v,..., v 6 R 4 aus Aufgabe P 6: M = v =, v =, v =, v 4 =, v 5 =, v 6 = Welche der folgenden Aussagen sind wahr? span(v,
Abschlussprüfung Realschule Bayern II / III: 2009 Haupttermin B 1.0 B 1.1
 B 1.0 B 1.1 L: Wir wissen von, dass sie den Scheitel hat und durch den Punkt läuft. Was nichts bringt, ist beide Punkte in die allgemeine Parabelgleichung einzusetzen und das Gleichungssystem zu lösen,
B 1.0 B 1.1 L: Wir wissen von, dass sie den Scheitel hat und durch den Punkt läuft. Was nichts bringt, ist beide Punkte in die allgemeine Parabelgleichung einzusetzen und das Gleichungssystem zu lösen,
50. Mathematik-Olympiade 2. Stufe (Regionalrunde) Klasse 11 13. 501322 Lösung 10 Punkte
 Klasse 11 13. 501322 Lösung 10 Punkte") 50. Mathematik-Olympiade. Stufe (Regionalrunde) Klasse 3 Lösungen c 00 Aufgabenausschuss des Mathematik-Olympiaden e.v. www.mathematik-olympiaden.de. Alle Rechte vorbehalten. 503 Lösung 0 Punkte Es seien
50. Mathematik-Olympiade. Stufe (Regionalrunde) Klasse 3 Lösungen c 00 Aufgabenausschuss des Mathematik-Olympiaden e.v. www.mathematik-olympiaden.de. Alle Rechte vorbehalten. 503 Lösung 0 Punkte Es seien
9.2. DER SATZ ÜBER IMPLIZITE FUNKTIONEN 83
 9.. DER SATZ ÜBER IMPLIZITE FUNKTIONEN 83 Die Grundfrage bei der Anwendung des Satzes über implizite Funktionen betrifft immer die folgende Situation: Wir haben eine Funktion f : V W und eine Stelle x
9.. DER SATZ ÜBER IMPLIZITE FUNKTIONEN 83 Die Grundfrage bei der Anwendung des Satzes über implizite Funktionen betrifft immer die folgende Situation: Wir haben eine Funktion f : V W und eine Stelle x
Klassenarbeit zu linearen Gleichungssystemen
 Klassenarbeit zu linearen Gleichungssystemen Aufgabe : Bestimme die Lösungsmenge der Gleichungssysteme mit Hilfe des Additionsverfahrens: x + 4y = 8 5x y = x y = x y = Aufgabe : Bestimme die Lösungsmenge
Klassenarbeit zu linearen Gleichungssystemen Aufgabe : Bestimme die Lösungsmenge der Gleichungssysteme mit Hilfe des Additionsverfahrens: x + 4y = 8 5x y = x y = x y = Aufgabe : Bestimme die Lösungsmenge
Bei Konstruktionen dürfen nur die folgenden Schritte durchgeführt werden : Beliebigen Punkt auf einer Geraden, Strecke oder Kreislinie zeichnen.
 Geometrie I. Zeichnen und Konstruieren ================================================================== 1.1 Der Unterschied zwischen Zeichnen und Konstruieren Bei der Konstruktion einer geometrischen
Geometrie I. Zeichnen und Konstruieren ================================================================== 1.1 Der Unterschied zwischen Zeichnen und Konstruieren Bei der Konstruktion einer geometrischen
http://www.olympiade-mathematik.de 2. Mathematik Olympiade 2. Stufe (Kreisolympiade) Klasse 7 Saison 1962/1963 Aufgaben und Lösungen
 Klasse 7 Saison 1962/1963 Aufgaben und Lösungen") 2. Mathematik Olympiade Saison 1962/1963 Aufgaben und Lösungen 1 OJM 2. Mathematik-Olympiade Aufgaben Hinweis: Der Lösungsweg mit Begründungen und Nebenrechnungen soll deutlich erkennbar in logisch und
2. Mathematik Olympiade Saison 1962/1963 Aufgaben und Lösungen 1 OJM 2. Mathematik-Olympiade Aufgaben Hinweis: Der Lösungsweg mit Begründungen und Nebenrechnungen soll deutlich erkennbar in logisch und
Rekursionen. Georg Anegg 25. November 2009. Methoden und Techniken an Beispielen erklärt
 Methoden und Techniken an Beispielen erklärt Georg Anegg 5. November 009 Beispiel. Die Folge {a n } sei wie folgt definiert (a, d, q R, q ): a 0 a, a n+ a n q + d (n 0) Man bestimme eine explizite Darstellung
Methoden und Techniken an Beispielen erklärt Georg Anegg 5. November 009 Beispiel. Die Folge {a n } sei wie folgt definiert (a, d, q R, q ): a 0 a, a n+ a n q + d (n 0) Man bestimme eine explizite Darstellung
Computer Vision I. Nikos Canterakis. Lehrstuhl für Mustererkennung, Universität Freiburg,
 Nikos Canterakis Lehrstuhl für Mustererkennung, Universität Freiburg, Literatur Richard Hartle and Andrew Zisserman. Multiple View Geometr in computer vision, Cambridge Universit Press, 2 nd Ed., 23. O.D.
Nikos Canterakis Lehrstuhl für Mustererkennung, Universität Freiburg, Literatur Richard Hartle and Andrew Zisserman. Multiple View Geometr in computer vision, Cambridge Universit Press, 2 nd Ed., 23. O.D.
Lichtbrechung an Linsen
 Sammellinsen Lichtbrechung an Linsen Fällt ein paralleles Lichtbündel auf eine Sammellinse, so werden die Lichtstrahlen so gebrochen, dass sie durch einen Brennpunkt der Linse verlaufen. Der Abstand zwischen
Sammellinsen Lichtbrechung an Linsen Fällt ein paralleles Lichtbündel auf eine Sammellinse, so werden die Lichtstrahlen so gebrochen, dass sie durch einen Brennpunkt der Linse verlaufen. Der Abstand zwischen
Grundlagen der höheren Mathematik Einige Hinweise zum Lösen von Gleichungen
 Grundlagen der höheren Mathematik Einige Hinweise zum Lösen von Gleichungen 1. Quadratische Gleichungen Quadratische Gleichungen lassen sich immer auf die sog. normierte Form x 2 + px + = 0 bringen, in
Grundlagen der höheren Mathematik Einige Hinweise zum Lösen von Gleichungen 1. Quadratische Gleichungen Quadratische Gleichungen lassen sich immer auf die sog. normierte Form x 2 + px + = 0 bringen, in
Hinweise zur Kalibrierung von Kameras mit einer AICON Kalibriertafel
 Hinweise zur Kalibrierung von Kameras mit einer AICON Kalibriertafel AICON 3D Systems GmbH Celler Straße 32 D-38114 Braunschweig Telefon: +49 (0) 5 31 58 000 58 Fax: +49 (0) 5 31 58 000 60 Email: [email protected]
Hinweise zur Kalibrierung von Kameras mit einer AICON Kalibriertafel AICON 3D Systems GmbH Celler Straße 32 D-38114 Braunschweig Telefon: +49 (0) 5 31 58 000 58 Fax: +49 (0) 5 31 58 000 60 Email: [email protected]
Basis und Dimension. Als nächstes wollen wir die wichtigen Begriffe Erzeugendensystem und Basis eines Vektorraums definieren.
 Basis und Dimension Als nächstes wollen wir die wichtigen Begriffe Erzeugendensystem und Basis eines Vektorraums definieren. Definition. Sei V ein K-Vektorraum und (v i ) i I eine Familie von Vektoren
Basis und Dimension Als nächstes wollen wir die wichtigen Begriffe Erzeugendensystem und Basis eines Vektorraums definieren. Definition. Sei V ein K-Vektorraum und (v i ) i I eine Familie von Vektoren
Zeichen bei Zahlen entschlüsseln
 Zeichen bei Zahlen entschlüsseln In diesem Kapitel... Verwendung des Zahlenstrahls Absolut richtige Bestimmung von absoluten Werten Operationen bei Zahlen mit Vorzeichen: Addieren, Subtrahieren, Multiplizieren
Zeichen bei Zahlen entschlüsseln In diesem Kapitel... Verwendung des Zahlenstrahls Absolut richtige Bestimmung von absoluten Werten Operationen bei Zahlen mit Vorzeichen: Addieren, Subtrahieren, Multiplizieren
Monatliche Grundgebühr: 5,00 Zeitabhängige Nutzung: Feiertags/Sonntags: 0,04 /min
 Aufgabe 1: Wortvorschriften Gib zu den Wortvorschriften je eine Funktionsgleichung an: a) Jeder Zahl wird das Doppelte zugeordnet b) Jeder Zahl wird das um 6 verminderte Dreifache zugeordnet c) Jeder Zahl
Aufgabe 1: Wortvorschriften Gib zu den Wortvorschriften je eine Funktionsgleichung an: a) Jeder Zahl wird das Doppelte zugeordnet b) Jeder Zahl wird das um 6 verminderte Dreifache zugeordnet c) Jeder Zahl
Der Zwei-Quadrate-Satz von Fermat
 Der Zwei-Quadrate-Satz von Fermat Proseminar: Das BUCH der Beweise Fridtjof Schulte Steinberg Institut für Informatik Humboldt-Universität zu Berlin 29.November 2012 1 / 20 Allgemeines Pierre de Fermat
Der Zwei-Quadrate-Satz von Fermat Proseminar: Das BUCH der Beweise Fridtjof Schulte Steinberg Institut für Informatik Humboldt-Universität zu Berlin 29.November 2012 1 / 20 Allgemeines Pierre de Fermat
der Eingabe! Haben Sie das Ergebnis? Auf diesen schwarzen Punkt kommen wir noch zu sprechen.
 Medizintechnik MATHCAD Kapitel. Einfache Rechnungen mit MATHCAD ohne Variablendefinition In diesem kleinen Kapitel wollen wir die ersten Schritte mit MATHCAD tun und folgende Aufgaben lösen: 8 a: 5 =?
Medizintechnik MATHCAD Kapitel. Einfache Rechnungen mit MATHCAD ohne Variablendefinition In diesem kleinen Kapitel wollen wir die ersten Schritte mit MATHCAD tun und folgende Aufgaben lösen: 8 a: 5 =?
Plotten von Linien ( nach Jack Bresenham, 1962 )
") Plotten von Linien ( nach Jack Bresenham, 1962 ) Ac Eine auf dem Bildschirm darzustellende Linie sieht treppenförmig aus, weil der Computer Linien aus einzelnen (meist quadratischen) Bildpunkten, Pixels
Plotten von Linien ( nach Jack Bresenham, 1962 ) Ac Eine auf dem Bildschirm darzustellende Linie sieht treppenförmig aus, weil der Computer Linien aus einzelnen (meist quadratischen) Bildpunkten, Pixels
Fit in Mathe. Juni 2014 Klassenstufe 9. Lineare Funktionen
 Thema Musterlösungen Juni 0 Klassenstufe 9 Lineare Funktionen a) Vervollständige die Tabelle mit den Funktionswerten: x 6 8 0 6 0 x 5 6 7 8 9 0 b) Gib die Funktionsgleichung an x 6 8 0 6 0 8 x,5,75,5 0,5-0,5
Thema Musterlösungen Juni 0 Klassenstufe 9 Lineare Funktionen a) Vervollständige die Tabelle mit den Funktionswerten: x 6 8 0 6 0 x 5 6 7 8 9 0 b) Gib die Funktionsgleichung an x 6 8 0 6 0 8 x,5,75,5 0,5-0,5
Unterrichtsmaterialien in digitaler und in gedruckter Form. Auszug aus: Übungsbuch für den Grundkurs mit Tipps und Lösungen: Analysis
 Unterrichtsmaterialien in digitaler und in gedruckter Form Auszug aus: Übungsbuch für den Grundkurs mit Tipps und Lösungen: Analysis Das komplette Material finden Sie hier: Download bei School-Scout.de
Unterrichtsmaterialien in digitaler und in gedruckter Form Auszug aus: Übungsbuch für den Grundkurs mit Tipps und Lösungen: Analysis Das komplette Material finden Sie hier: Download bei School-Scout.de
Geometrische Optik. Ausserdem gilt sin ϕ = y R. Einsetzen in die Gleichung für die Brennweite ergibt unmittelbar: 1 2 1 sin 2 ϕ
 Geometrische Optik GO: 2 Leiten Sie für einen Hohlspiegel die Abhängigkeit der Brennweite vom Achsabstand des einfallenden Strahls her (f = f(y))! Musterlösung: Für die Brennweite des Hohlspiegels gilt:
Geometrische Optik GO: 2 Leiten Sie für einen Hohlspiegel die Abhängigkeit der Brennweite vom Achsabstand des einfallenden Strahls her (f = f(y))! Musterlösung: Für die Brennweite des Hohlspiegels gilt:
Handout 6. Entwicklung von Makros
 Handout 6 Entwicklung von Makros Cinderella kann eine Sequenz von Konstruktionsbefehlen aufzeichnen und sie als neues Werkzeug speichern. Dies bezeichnet man als Makro-Konstruktion. Mit diesen Aufgaben
Handout 6 Entwicklung von Makros Cinderella kann eine Sequenz von Konstruktionsbefehlen aufzeichnen und sie als neues Werkzeug speichern. Dies bezeichnet man als Makro-Konstruktion. Mit diesen Aufgaben
Fachschaft Mathematik und Informatik (FIM) LA I VORKURS. Herbstsemester 2015. gehalten von Harald Baum
 LA I VORKURS. Herbstsemester 2015. gehalten von Harald Baum") Fachschaft Mathematik und Informatik (FIM) LA I VORKURS Herbstsemester 2015 gehalten von Harald Baum 2. September 2015 Inhaltsverzeichnis 1. Stichpunkte zur Linearen Algebra I 2. Körper 3. Vektorräume
Fachschaft Mathematik und Informatik (FIM) LA I VORKURS Herbstsemester 2015 gehalten von Harald Baum 2. September 2015 Inhaltsverzeichnis 1. Stichpunkte zur Linearen Algebra I 2. Körper 3. Vektorräume
Geometrie Klasse 5 Basiswissen und Grundbegriffe der Geometrie
 Geometrie Klasse 5 Basiswissen und Grundbegriffe der Geometrie Skript Beispiele Musteraufgaben Seite 1 Impressum Mathefritz Verlag Jörg Christmann Pfaffenkopfstr. 21E 66125 Saarbrücken [email protected]
Geometrie Klasse 5 Basiswissen und Grundbegriffe der Geometrie Skript Beispiele Musteraufgaben Seite 1 Impressum Mathefritz Verlag Jörg Christmann Pfaffenkopfstr. 21E 66125 Saarbrücken [email protected]
VON GRUND AUF RICHTIG AUFBAUEN
 EIN RICHTIG SKALIERTES NETZ VON GRUND AUF RICHTIG AUFBAUEN Oft braucht man ein kleines Netz, um eine Funktionalität auszutesten, schnell mal eben eine Abschätzung zu berechnen oder als Ergänzung zu einem
EIN RICHTIG SKALIERTES NETZ VON GRUND AUF RICHTIG AUFBAUEN Oft braucht man ein kleines Netz, um eine Funktionalität auszutesten, schnell mal eben eine Abschätzung zu berechnen oder als Ergänzung zu einem
1. Sichtbarkeitsproblem beim Rendern einer dreidimensionalen Szene auf einer zweidimensionalen
 3D-Rendering Ulf Döring, Markus Färber 07.03.2011 1. Sichtbarkeitsproblem beim Rendern einer dreidimensionalen Szene auf einer zweidimensionalen Anzeigefläche (a) Worin besteht das Sichtbarkeitsproblem?
3D-Rendering Ulf Döring, Markus Färber 07.03.2011 1. Sichtbarkeitsproblem beim Rendern einer dreidimensionalen Szene auf einer zweidimensionalen Anzeigefläche (a) Worin besteht das Sichtbarkeitsproblem?
u + v = v + u. u + (v + w) = (u + v) + w. 0 V + v = v + 0 V = v v + u = u + v = 0 V. t (u + v) = t u + t v, (t + s) u = t u + s u.
 = (u + v) + w. 0 V + v = v + 0 V = v v + u = u + v = 0 V. t (u + v) = t u + t v, (t + s) u = t u + s u.") Universität Stuttgart Fachbereich Mathematik Prof. Dr. C. Hesse PD Dr. P. H. Lesky Dipl. Math. D. Zimmermann Msc. J. Köllner FAQ 3 Höhere Mathematik I 4..03 el, kyb, mecha, phys Vektorräume Vektorräume
Universität Stuttgart Fachbereich Mathematik Prof. Dr. C. Hesse PD Dr. P. H. Lesky Dipl. Math. D. Zimmermann Msc. J. Köllner FAQ 3 Höhere Mathematik I 4..03 el, kyb, mecha, phys Vektorräume Vektorräume
Lineargleichungssysteme: Additions-/ Subtraktionsverfahren
 Lineargleichungssysteme: Additions-/ Subtraktionsverfahren W. Kippels 22. Februar 2014 Inhaltsverzeichnis 1 Einleitung 2 2 Lineargleichungssysteme zweiten Grades 2 3 Lineargleichungssysteme höheren als
Lineargleichungssysteme: Additions-/ Subtraktionsverfahren W. Kippels 22. Februar 2014 Inhaltsverzeichnis 1 Einleitung 2 2 Lineargleichungssysteme zweiten Grades 2 3 Lineargleichungssysteme höheren als
3. LINEARE GLEICHUNGSSYSTEME
 176 3. LINEARE GLEICHUNGSSYSTEME 90 Vitamin-C-Gehalt verschiedener Säfte 18,0 mg 35,0 mg 12,5 mg 1. a) 100 ml + 50 ml + 50 ml = 41,75 mg 100 ml 100 ml 100 ml b) : Menge an Kirschsaft in ml y: Menge an
176 3. LINEARE GLEICHUNGSSYSTEME 90 Vitamin-C-Gehalt verschiedener Säfte 18,0 mg 35,0 mg 12,5 mg 1. a) 100 ml + 50 ml + 50 ml = 41,75 mg 100 ml 100 ml 100 ml b) : Menge an Kirschsaft in ml y: Menge an
1. Man schreibe die folgenden Aussagen jeweils in einen normalen Satz um. Zum Beispiel kann man die Aussage:
 Zählen und Zahlbereiche Übungsblatt 1 1. Man schreibe die folgenden Aussagen jeweils in einen normalen Satz um. Zum Beispiel kann man die Aussage: Für alle m, n N gilt m + n = n + m. in den Satz umschreiben:
Zählen und Zahlbereiche Übungsblatt 1 1. Man schreibe die folgenden Aussagen jeweils in einen normalen Satz um. Zum Beispiel kann man die Aussage: Für alle m, n N gilt m + n = n + m. in den Satz umschreiben:
H. Gruber, R. Neumann. Erfolg im Mathe-Abi. Übungsbuch für die optimale Vorbereitung in Analysis, Geometrie und Stochastik mit verständlichen Lösungen
 H. Gruber, R. Neumann Erfolg im Mathe-Abi Übungsbuch für die optimale Vorbereitung in Analysis, Geometrie und Stochastik mit verständlichen Lösungen Inhaltsverzeichnis Inhaltsverzeichnis Analysis Von der
H. Gruber, R. Neumann Erfolg im Mathe-Abi Übungsbuch für die optimale Vorbereitung in Analysis, Geometrie und Stochastik mit verständlichen Lösungen Inhaltsverzeichnis Inhaltsverzeichnis Analysis Von der
Adobe Flash CS4»3D-Tool«
 Flash Tutorial Philipp Nunnemann Adobe Flash CS4»3D-Tool«Im folgenden Tutorial könnt Ihr das»3d-tool«in Adobe Flash CS4 kennenlernen. Das Tool erlaubt euch, Objekte im dreidimensionalen Raum zu bewegen.
Flash Tutorial Philipp Nunnemann Adobe Flash CS4»3D-Tool«Im folgenden Tutorial könnt Ihr das»3d-tool«in Adobe Flash CS4 kennenlernen. Das Tool erlaubt euch, Objekte im dreidimensionalen Raum zu bewegen.
Rekursionen (Teschl/Teschl 8.1-8.2)
") Rekursionen (Teschl/Teschl 8.1-8.2) Eine Rekursion kter Ordnung für k N ist eine Folge x 1, x 2, x 3,... deniert durch eine Rekursionsvorschrift x n = f n (x n 1,..., x n k ) für n > k, d. h. jedes Folgenglied
Rekursionen (Teschl/Teschl 8.1-8.2) Eine Rekursion kter Ordnung für k N ist eine Folge x 1, x 2, x 3,... deniert durch eine Rekursionsvorschrift x n = f n (x n 1,..., x n k ) für n > k, d. h. jedes Folgenglied
Lösung. Prüfungsteil 1: Aufgabe 1
 Zentrale Prüfung 01 Lösung Diese Lösung wurde erstellt von Cornelia Sanzenbacher. Sie ist keine offizielle Lösung des Ministeriums für Schule und Weiterbildung des Landes. Prüfungsteil 1: Aufgabe 1 a)
Zentrale Prüfung 01 Lösung Diese Lösung wurde erstellt von Cornelia Sanzenbacher. Sie ist keine offizielle Lösung des Ministeriums für Schule und Weiterbildung des Landes. Prüfungsteil 1: Aufgabe 1 a)
Kurzeinweisung. WinFoto Plus
 Kurzeinweisung WinFoto Plus Codex GmbH Stand 2012 Inhaltsverzeichnis Einleitung... 3 Allgemeines... 4 Vorbereitungen... 4 Drucken des Baustellenblatts im Projekt... 4 Drucken des Barcodes auf dem Arbeitsauftrag
Kurzeinweisung WinFoto Plus Codex GmbH Stand 2012 Inhaltsverzeichnis Einleitung... 3 Allgemeines... 4 Vorbereitungen... 4 Drucken des Baustellenblatts im Projekt... 4 Drucken des Barcodes auf dem Arbeitsauftrag
Mathematik: Mag. Schmid Wolfgang Arbeitsblatt 3 1. Semester ARBEITSBLATT 3 RECHNEN MIT GANZEN ZAHLEN
 ARBEITSBLATT 3 RECHNEN MIT GANZEN ZAHLEN Wir wollen nun die Rechengesetze der natürlichen Zahlen auf die Zahlenmenge der ganzen Zahlen erweitern und zwar so, dass sie zu keinem Widerspruch mit bisher geltenden
ARBEITSBLATT 3 RECHNEN MIT GANZEN ZAHLEN Wir wollen nun die Rechengesetze der natürlichen Zahlen auf die Zahlenmenge der ganzen Zahlen erweitern und zwar so, dass sie zu keinem Widerspruch mit bisher geltenden
Computer Graphik. Mitschrift von www.kuertz.name
 Computer Graphik Mitschrift von www.kuertz.name Hinweis: Dies ist kein offizielles Script, sondern nur eine private Mitschrift. Die Mitschriften sind teweilse unvollständig, falsch oder inaktuell, da sie
Computer Graphik Mitschrift von www.kuertz.name Hinweis: Dies ist kein offizielles Script, sondern nur eine private Mitschrift. Die Mitschriften sind teweilse unvollständig, falsch oder inaktuell, da sie
Gegeben ist die Funktion f durch. Ihr Schaubild sei K.
 Aufgabe I 1 Gegeben ist die Funktion f durch. Ihr Schaubild sei K. a) Geben Sie die maximale Definitionsmenge D f an. Untersuchen Sie K auf gemeinsame Punkte mit der x-achse. Bestimmen Sie die Intervalle,
Aufgabe I 1 Gegeben ist die Funktion f durch. Ihr Schaubild sei K. a) Geben Sie die maximale Definitionsmenge D f an. Untersuchen Sie K auf gemeinsame Punkte mit der x-achse. Bestimmen Sie die Intervalle,
Hauptprüfung Abiturprüfung 2015 (ohne CAS) Baden-Württemberg
 Baden-Württemberg") Hauptprüfung Abiturprüfung 205 (ohne CAS) Baden-Württemberg Wahlteil Analysis Hilfsmittel: GTR und Formelsammlung allgemeinbildende Gymnasien Alexander Schwarz www.mathe-aufgaben.com März 205 Aufgabe A
Hauptprüfung Abiturprüfung 205 (ohne CAS) Baden-Württemberg Wahlteil Analysis Hilfsmittel: GTR und Formelsammlung allgemeinbildende Gymnasien Alexander Schwarz www.mathe-aufgaben.com März 205 Aufgabe A
Vorkurs Mathematik Übungen zu Differentialgleichungen
 Vorkurs Mathematik Übungen zu Differentialgleichungen Als bekannt setzen wir die folgenden Umformungen voraus: e ln(f(x)) = f(x) e f(x)+c = e f(x) e c e ln(f(x)) +c = f(x) e c = f(x) c f ( g(x) ) g (x)
Vorkurs Mathematik Übungen zu Differentialgleichungen Als bekannt setzen wir die folgenden Umformungen voraus: e ln(f(x)) = f(x) e f(x)+c = e f(x) e c e ln(f(x)) +c = f(x) e c = f(x) c f ( g(x) ) g (x)
Die reellen Lösungen der kubischen Gleichung
 Die reellen Lösungen der kubischen Gleichung Klaus-R. Löffler Inhaltsverzeichnis 1 Einfach zu behandelnde Sonderfälle 1 2 Die ganzrationale Funktion dritten Grades 2 2.1 Reduktion...........................................
Die reellen Lösungen der kubischen Gleichung Klaus-R. Löffler Inhaltsverzeichnis 1 Einfach zu behandelnde Sonderfälle 1 2 Die ganzrationale Funktion dritten Grades 2 2.1 Reduktion...........................................
Satz 25 A sei eine (n n)-matrix über K
-matrix über K") Satz 25 Satz 25 A sei eine (n n)-matrix über K Satz 25 A sei eine (n n)-matrix über K mit paarweise verschiedenen Eigenwerten λ 1,...,λ m. Satz 25 A sei eine (n n)-matrix über K mit paarweise verschiedenen
Satz 25 Satz 25 A sei eine (n n)-matrix über K Satz 25 A sei eine (n n)-matrix über K mit paarweise verschiedenen Eigenwerten λ 1,...,λ m. Satz 25 A sei eine (n n)-matrix über K mit paarweise verschiedenen
Um über FTP Dateien auf Ihren Public Space Server - Zugang laden zu können benötigen Sie folgende Angaben:
 FTP-Upload auf den Public Space Server mit FileZilla 1. Was wird benötigt? Um über FTP Dateien auf Ihren Public Space Server - Zugang laden zu können benötigen Sie folgende Angaben: Benutzername: Ihr Webuser
FTP-Upload auf den Public Space Server mit FileZilla 1. Was wird benötigt? Um über FTP Dateien auf Ihren Public Space Server - Zugang laden zu können benötigen Sie folgende Angaben: Benutzername: Ihr Webuser
5. Übung zum G8-Vorkurs Mathematik (WiSe 2011/12)
") Technische Universität München Zentrum Mathematik PD Dr. hristian Karpfinger http://www.ma.tum.de/mathematik/g8vorkurs 5. Übung zum G8-Vorkurs Mathematik (WiSe 2011/12) Aufgabe 5.1: In einer Implementierung
Technische Universität München Zentrum Mathematik PD Dr. hristian Karpfinger http://www.ma.tum.de/mathematik/g8vorkurs 5. Übung zum G8-Vorkurs Mathematik (WiSe 2011/12) Aufgabe 5.1: In einer Implementierung
Wie Sie mit Mastern arbeiten
 Wie Sie mit Mastern arbeiten Was ist ein Master? Einer der großen Vorteile von EDV besteht darin, dass Ihnen der Rechner Arbeit abnimmt. Diesen Vorteil sollten sie nutzen, wo immer es geht. In PowerPoint
Wie Sie mit Mastern arbeiten Was ist ein Master? Einer der großen Vorteile von EDV besteht darin, dass Ihnen der Rechner Arbeit abnimmt. Diesen Vorteil sollten sie nutzen, wo immer es geht. In PowerPoint
x 2 2x + = 3 + Es gibt genau ein x R mit ax + b = 0, denn es gilt
 - 17 - Die Frage ist hier also: Für welche x R gilt x = x + 1? Das ist eine quadratische Gleichung für x. Es gilt x = x + 1 x x 3 = 0, und man kann quadratische Ergänzung machen:... ( ) ( ) x x + = 3 +
- 17 - Die Frage ist hier also: Für welche x R gilt x = x + 1? Das ist eine quadratische Gleichung für x. Es gilt x = x + 1 x x 3 = 0, und man kann quadratische Ergänzung machen:... ( ) ( ) x x + = 3 +
Mathematik für Informatiker II. Beispiellösungen zur Probeklausur. Aufgabe 1. Aufgabe 2 (5+5 Punkte) Christoph Eisinger Sommersemester 2011
 Christoph Eisinger Sommersemester 2011") Mathematik für Informatiker II Christoph Eisinger Sommersemester 211 Beispiellösungen zur Probeklausur Aufgabe 1 Gegeben sind die Polynome f, g, h K[x]. Zu zeigen: Es gibt genau dann Polynome h 1 und h
Mathematik für Informatiker II Christoph Eisinger Sommersemester 211 Beispiellösungen zur Probeklausur Aufgabe 1 Gegeben sind die Polynome f, g, h K[x]. Zu zeigen: Es gibt genau dann Polynome h 1 und h
Keine Disketteneinreichung ab 1. Februar 2014
 Keine Disketteneinreichung ab 1. Februar 2014 Sehr geehrte Damen und Herren, die nationalen Lastschrift- und Überweisungsverfahren werden ab 1. Februar 2014 zu Gunsten der SEPA-Zahlungsaufträge eingestellt.
Keine Disketteneinreichung ab 1. Februar 2014 Sehr geehrte Damen und Herren, die nationalen Lastschrift- und Überweisungsverfahren werden ab 1. Februar 2014 zu Gunsten der SEPA-Zahlungsaufträge eingestellt.
Gitterherstellung und Polarisation
 Versuch 1: Gitterherstellung und Polarisation Bei diesem Versuch wollen wir untersuchen wie man durch Überlagerung von zwei ebenen Wellen Gttterstrukturen erzeugen kann. Im zweiten Teil wird die Sichtbarkeit
Versuch 1: Gitterherstellung und Polarisation Bei diesem Versuch wollen wir untersuchen wie man durch Überlagerung von zwei ebenen Wellen Gttterstrukturen erzeugen kann. Im zweiten Teil wird die Sichtbarkeit
V 2 B, C, D Drinks. Möglicher Lösungsweg a) Gleichungssystem: 300x + 400 y = 520 300x + 500y = 597,5 2x3 Matrix: Energydrink 0,7 Mineralwasser 0,775,
 Gleichungssystem: 300x + 400 y = 520 300x + 500y = 597,5 2x3 Matrix: Energydrink 0,7 Mineralwasser 0,775,") Aufgabenpool für angewandte Mathematik / 1. Jahrgang V B, C, D Drinks Ein gastronomischer Betrieb kauft 300 Dosen Energydrinks (0,3 l) und 400 Liter Flaschen Mineralwasser und zahlt dafür 50, Euro. Einen
Aufgabenpool für angewandte Mathematik / 1. Jahrgang V B, C, D Drinks Ein gastronomischer Betrieb kauft 300 Dosen Energydrinks (0,3 l) und 400 Liter Flaschen Mineralwasser und zahlt dafür 50, Euro. Einen
Umgekehrte Kurvendiskussion
 Umgekehrte Kurvendiskussion Bei einer Kurvendiskussion haben wir eine Funktionsgleichung vorgegeben und versuchen ihre 'Besonderheiten' herauszufinden: Nullstellen, Extremwerte, Wendepunkte, Polstellen
Umgekehrte Kurvendiskussion Bei einer Kurvendiskussion haben wir eine Funktionsgleichung vorgegeben und versuchen ihre 'Besonderheiten' herauszufinden: Nullstellen, Extremwerte, Wendepunkte, Polstellen
Division Für diesen Abschnitt setzen wir voraus, dass der Koeffizientenring ein Körper ist. Betrachte das Schema
 Division Für diesen Abschnitt setzen wir voraus, dass der Koeffizientenring ein Körper ist. Betrachte das Schema 2x 4 + x 3 + x + 3 div x 2 + x 1 = 2x 2 x + 3 (2x 4 + 2x 3 2x 2 ) x 3 + 2x 2 + x + 3 ( x
Division Für diesen Abschnitt setzen wir voraus, dass der Koeffizientenring ein Körper ist. Betrachte das Schema 2x 4 + x 3 + x + 3 div x 2 + x 1 = 2x 2 x + 3 (2x 4 + 2x 3 2x 2 ) x 3 + 2x 2 + x + 3 ( x
Darstellende Geometrie Übungen. Tutorial. Übungsblatt: Perspektive - Rekonstruktion
 Darstellende Geometrie Übungen Institut für Architektur und Medien Tutorial Übungsblatt: Perspektive - Rekonstruktion Gegeben sind ein Foto von einem quaderförmigen Objekt sowie die Abmessungen des Basisrechteckes.
Darstellende Geometrie Übungen Institut für Architektur und Medien Tutorial Übungsblatt: Perspektive - Rekonstruktion Gegeben sind ein Foto von einem quaderförmigen Objekt sowie die Abmessungen des Basisrechteckes.
Komplexe Zahlen und Wechselstromwiderstände
 Komplexe Zahlen und Wechselstromwiderstände Axel Tobias 22.2.2000 Ein besonderer Dank geht an Ingo Treunowski, der die Übertragung meines Manuskriptes in L A TEX durchgeführt hat tob skript komplex.tex.
Komplexe Zahlen und Wechselstromwiderstände Axel Tobias 22.2.2000 Ein besonderer Dank geht an Ingo Treunowski, der die Übertragung meines Manuskriptes in L A TEX durchgeführt hat tob skript komplex.tex.
Mathematischer Vorkurs für Physiker WS 2009/10
 TU München Prof. Dr. P. Vogl, Dr. S. Schlicht Mathematischer Vorkurs für Physiker WS 2009/10 Vorlesung 1, Montag vormittag Vektoralgebra Ein Vektor lässt sich geometrisch als eine gerichtete Strecke darstellen,
TU München Prof. Dr. P. Vogl, Dr. S. Schlicht Mathematischer Vorkurs für Physiker WS 2009/10 Vorlesung 1, Montag vormittag Vektoralgebra Ein Vektor lässt sich geometrisch als eine gerichtete Strecke darstellen,
Also kann nur A ist roter Südler und B ist grüner Nordler gelten.
 Aufgabe 1.1: (4 Punkte) Der Planet Og wird von zwei verschiedenen Rassen bewohnt - dem grünen und dem roten Volk. Desweiteren sind die Leute, die auf der nördlichen Halbkugel geboren wurden von denen auf
Aufgabe 1.1: (4 Punkte) Der Planet Og wird von zwei verschiedenen Rassen bewohnt - dem grünen und dem roten Volk. Desweiteren sind die Leute, die auf der nördlichen Halbkugel geboren wurden von denen auf
WS 2009/10. Diskrete Strukturen
 WS 2009/10 Diskrete Strukturen Prof. Dr. J. Esparza Lehrstuhl für Grundlagen der Softwarezuverlässigkeit und theoretische Informatik Fakultät für Informatik Technische Universität München http://www7.in.tum.de/um/courses/ds/ws0910
WS 2009/10 Diskrete Strukturen Prof. Dr. J. Esparza Lehrstuhl für Grundlagen der Softwarezuverlässigkeit und theoretische Informatik Fakultät für Informatik Technische Universität München http://www7.in.tum.de/um/courses/ds/ws0910
Name: Klasse: Datum: Klassenarbeit Wachstumsvorgänge Kl10-Gruppe B
 Name: Klasse: Datum: Teil B Klassenarbeit Wachstumsvorgänge Kl0-Gruppe B. Gegeben ist die Exponentialfunktion y=f x =0.8 2 x ; x R. (9P) a) Geben Sie die folgenden Eigenschaften dieser Funktion an! Wertebereich,
Name: Klasse: Datum: Teil B Klassenarbeit Wachstumsvorgänge Kl0-Gruppe B. Gegeben ist die Exponentialfunktion y=f x =0.8 2 x ; x R. (9P) a) Geben Sie die folgenden Eigenschaften dieser Funktion an! Wertebereich,
Repetitionsaufgaben Wurzelgleichungen
 Repetitionsaufgaben Wurzelgleichungen Inhaltsverzeichnis A) Vorbemerkungen B) Lernziele C) Theorie mit Aufgaben D) Aufgaben mit Musterlösungen 4 A) Vorbemerkungen Bitte beachten Sie: Bei Wurzelgleichungen
Repetitionsaufgaben Wurzelgleichungen Inhaltsverzeichnis A) Vorbemerkungen B) Lernziele C) Theorie mit Aufgaben D) Aufgaben mit Musterlösungen 4 A) Vorbemerkungen Bitte beachten Sie: Bei Wurzelgleichungen
Entladen und Aufladen eines Kondensators über einen ohmschen Widerstand
 Entladen und Aufladen eines Kondensators über einen ohmschen Widerstand Vorüberlegung In einem seriellen Stromkreis addieren sich die Teilspannungen zur Gesamtspannung Bei einer Gesamtspannung U ges, der
Entladen und Aufladen eines Kondensators über einen ohmschen Widerstand Vorüberlegung In einem seriellen Stromkreis addieren sich die Teilspannungen zur Gesamtspannung Bei einer Gesamtspannung U ges, der
Im Jahr t = 0 hat eine Stadt 10.000 Einwohner. Nach 15 Jahren hat sich die Einwohnerzahl verdoppelt. z(t) = at + b
 = at + b") Aufgabe 1: Im Jahr t = 0 hat eine Stadt 10.000 Einwohner. Nach 15 Jahren hat sich die Einwohnerzahl verdoppelt. (a) Nehmen Sie lineares Wachstum gemäß z(t) = at + b an, wobei z die Einwohnerzahl ist und
Aufgabe 1: Im Jahr t = 0 hat eine Stadt 10.000 Einwohner. Nach 15 Jahren hat sich die Einwohnerzahl verdoppelt. (a) Nehmen Sie lineares Wachstum gemäß z(t) = at + b an, wobei z die Einwohnerzahl ist und
Ergänzungen zum Fundamentum
 Matura 2014 - Mathematik - Gymnasium Immensee 2 Ergänzungen zum Fundamentum Abstand eines Punktes zu einer Geraden d = AP v v Substitution ohne Grenzen Mit u = g(x) gilt: f(g(x))dx = 1 u f(u)du Matura
Matura 2014 - Mathematik - Gymnasium Immensee 2 Ergänzungen zum Fundamentum Abstand eines Punktes zu einer Geraden d = AP v v Substitution ohne Grenzen Mit u = g(x) gilt: f(g(x))dx = 1 u f(u)du Matura