Elektrische Maschinen und Antriebe. Fachhochschule Dortmund FB 3. (Synchronmaschine) Prof. Dr. Bernd Aschendorf
|
|
|
- Pamela Sachs
- vor 5 Jahren
- Abrufe
Transkript
1 Vorlesung Elektrische Maschinen und Antriebe Fachhochschule Dortmund FB 3 (Synchronmaschine) SS 09
2 Allgemeines
3 Die Synchronmaschine ist die bedeutendste Elektrische Maschine zur Erzeugung Elektrischer Energie. Der Name Synchronmaschine deutet darauf hin, daß die Synchronmaschine im normalen Betrieb, d.h. im stationären Betrieb, starr an die synchrone Drehzahl gebunden ist. Sie dreht synchron.
4 Synchronmaschine als Generator: 2 Typen: Vollpolläufer, die von Dampfturbinen angetrieben werden, Grenzleistung größer 1500 MW Schenkelpolmaschine, z.b. in Wasserkraftwerken und Notstromanlagen
5 Synchronmaschine als Motor: geringe Bedeutung: z.b. Motoren großer Leistung (Hochofengebläse) aufgrund der Blindleistungseigenschaften Uhren, Phonogeräte als Kleinstmotoren
6 Synchronmaschine als Motor: Aktuelle Entwicklung: Bürstenlose Gleichstrommaschine Brushless DC machine BLDC-Motor Mischung aus Synchronmaschine und Schrittmotor
7 Aufbau
8 Man unterscheidet bei der Synchronmaschine drei Bauformen.
9 Für Generatoren großer Drehzahl kommt die Vollpolmaschine zum Einsatz. Die Drehstromwicklung ist im Ständer untergebracht, während die Erregung in einen massiven Zylinder mit gefrästen Nuten eingebracht wird. Hierzu wird die Erregerwicklung im allgemeinen über Schleifringe mit Strom versorgt.
10 Die Schenkelpolmaschine kommt in Generatoren mit niedriger Drehzahl zum Einsatz. Als Innenpolmaschine ist die Drehstromwicklung wie bei der Vollpolmaschine im Ständer untergebracht. Die Erregung ist auf ausgeprägten Einzelpolen im Rotor untergebracht. Hierzu wird die Erregerwicklung im allgemeinen über Schleifringe mit Strom versorgt.
11 Als Außenpolmaschine sitzt die Erregung im Ständer, wie bei der Gleichstrommaschine im Ständer, während die Drehstromwicklung im Rotor untergebracht wird. Der Anschluß der Drehstromwicklung erfolgt über Schleifringe.
12 Zu unterscheiden sind allgemein die beiden Bauteile Ständer und Rotor (Läufer). Der Läufer hat bei der Vollpolmaschine einen geringen Durchmesser (Fliehkraft) und ist daher sehr lang. Bei der Schenkelpolmaschine ist der Durchmesser groß, dadurch ist das Blechpaket kürzer. In Wasserkraftwerken steht die Welle des Generators daher senkrecht zum Boden.

13 Beispiel des Ständers eines Turbogenerators

14 Beispiel des Läufers eines Turbogenerators

15 Beispiel des Läufers einer Schenkelpolsynchronmaschine
16 Zur Verbesserung der Felderregerkurve der Vollpolmaschine wird die Erregerwicklung unterschiedlich aufgebaut. Im obigen Bild sind Ausführungen wiedergegeben. Ziel ist eine möglichst sinusförmige Felderregerkurve bei optimalen Festigkeitseigenschaften.
17 Der Vollpolläufer ist als 2- oder 4-polige Maschine ausgeführt. Daher sind die Windungsausladungen an den Blechpaketenden sehr lang. Dies wird am unteren Bild verdeutlicht. Problematisch ist die Streuung aufgrund der weit ausladenden Wicklung.
18 Der prinzipielle elektrische Aufbau einer Schenkelpolmaschine mit mehr als 4 Polen ist in untenstehendem Bild zu erkennen. Auch hier ist die Ausführung der Polschuhe, im Gegensatz zur Gleichstrommaschine, zur Gewinnung einer sinusförmigen Felderregerkurve von entscheidender Bedeutung.
19
20 Allgemein wird zur Untersuchung der Wirkungsweise der Synchronmaschine folgendes Bild zugrundegelegt. Der Ständer mit der Drehstromwicklung steht fest, der Rotor dreht mit der synchronen Geschwindigkeit im Ständer. Es ergeben sich zwei zu unterscheidende Koordinatensysteme, das stehende und das darin drehende. Mit a, b und c sind die Wicklungsachsen der Drehstromwicklung beschrieben mit fd die Wicklungsachse der Erregerwicklung (für die im folgenden betrachtete Vollpolmaschine kommt nur die direkte Achse zum Tragen).
21 Erregung der Synchronmaschine
22 Die Erregung wird über verschiedenste Verfahren gespeist. Generell ist zu unterschieden zwischen der bürsten(schleifring-)losen und der Erregung über Schleifringe, die von außen mit Strom versorgt werden. Klassisch wird die Erregerspannung von einer oder mehreren Gleichstrommaschinen erzeugt, die im Maschinensatz integriert sind. Als Beispiel dient folgendes Bild.
23 Prinzipiell kann die Erregerspannung auch über Stromrichter erzeugt werden ohne Schleifringe zugeführt werden, dies ist beispielhaft in folgendem Bild dargestellt.
24 Erregungen ohne Schleifringe benötigen ein Spulensystem, das die Induktion von Spannungen in den Rotor ermöglicht und über einen rotierenden Gleichrichter die Gleichspannung für die Erregerwicklung erzeugt. Dies ist in folgendem Bild dargestellt.
25 Ein vollständig selbstregelndes Erregersystem, das aus der Klemmenspannung versorgt wird, ist die Selbsterregte, kompoundierte Synchronmaschine. Das Prinzip ist in folgendem Bild wiedergegeben.
26 Drehzahl
27 Die Synchronmaschine läuft synchron, dies wurde bereits erwähnt. Die Drehzahl wird durch die Frequenz des Netzes und die Polpaarzahl bestimmt. Der Zusammenhang ist: f 1 n 1 = p Somit ergeben sich in Europa (f 1 =50 Hz) p n in U/min Die Drehzahl wird üblicherweise in U/min angegeben, daher muß die Frequenz in 1/s mit 60 s/min multipliziert werden.
28 Luftspaltfeldentstehung in Stator und Rotor bei der Vollpolläufermaschine
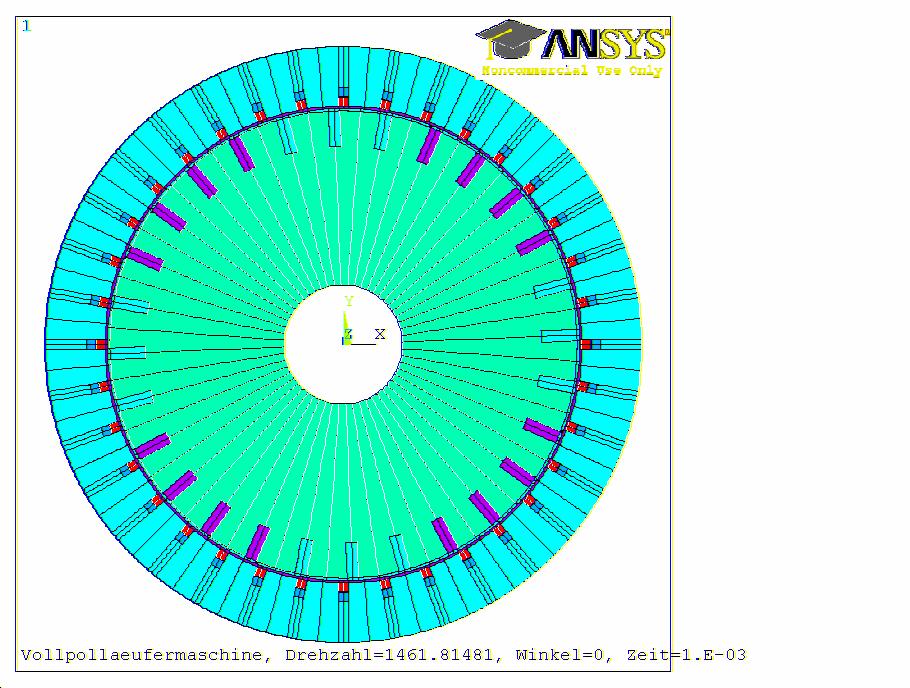
29 4-polige Vollpolläufer-Synchronmaschine

30 Feldbild aufgrund der Erregung des Vollpolläufers mit Gleichstrom
31 Magnetische Flußdichte aufgrund der Erregung des Vollpolläufers mit Gleichstrom

32 Stromdichteverteilung aufgrund der Erregung des Vollpolläufers mit Gleichstrom
33 Luftspaltfeld aufgrund der Erregung des Vollpolläufers mit Gleichstrom
34 Feldbild aufgrund der Erregung des Ständers

35 Magnetische Flußdichte aufgrund der Erregung des Ständers
36 Stromdichteverteilung aufgrund des Ständers
37 Luftspaltfeld aufgrund der Erregung des Ständers
38 Luftspaltfeldentstehung in Stator und Rotor bei der Schenkelpolläufermaschine

39 4-polige Schenkelpol-Synchronmaschine

40 Feldbild aufgrund der Erregung des Schenkelpolläufers mit Gleichstrom
41 Magnetische Flußdichte aufgrund der Erregung des Schenkelpolläufers mit Gleichstrom
42 Stromdichteverteilung aufgrund der Erregung des Schenkelpolläufers mit Gleichstrom
43 Luftspaltfeld aufgrund der Erregung des Schenkelpolläufers mit Gleichstrom

44 Feldbild aufgrund der Erregung des Ständers

45 Magnetische Flußdichte aufgrund der Erregung des Ständers

46 Stromdichteverteilung aufgrund des Ständers
47 Luftspaltfeld aufgrund der Erregung des Ständers

48 Feldbild aufgrund der Erregung des Ständers bei verdrehtem Läufer
49 Magnetische Flußdichte aufgrund der Erregung des Ständers bei verdrehtem Läufer
50 Stromdichteverteilung aufgrund des Ständers bei verdrehtem Läufer
51 Luftspaltfeld aufgrund der Erregung des Ständers bei verdrehtem Läufer
52 Wirkungsprinzip der Synchronmaschine:
53 Wirkungsprinzip der Synchronmaschine (I): Bei vorhandenem Erregerfeld durch Speisung des Läufers mit einem Gleichstrom richtet sich der Läufer ständig zum umlaufenden Drehfeld des Ständers aus. Es erfolgt eine direkte magnetische Kopplung. Hierbei wird zunächst von einem mechanisch unbelasteten Läufer ausgegangen. Bei Vollpolläufern ist eine Speisung des Läufers zwingend erforderlich, bei Schenkelpolläufern reicht bereits die Reluktanz der Anordnung zur Kopplung. Durch Steigerung der Erregung des Läufers wird die Kopplung gesteigert. Somit dreht der Läufer synchron mit dem Drehfeld des Ständers mit. Die Frequenz des den Ständer speisenden Stromes des Drehstromsystems und die Polpaarzahl von Ständer und Läufer bestimmt die Drehzahl der Synchronmaschine.
54 Wirkungsprinzip der Synchronmaschine (II): Wird der Läufer mechanisch belastet, sei es durch Antrieb über eine Turbine oder Belastung durch eine rotierende Last, wird die magnetische Kopplung belastet. Hierdurch wird der Läufer statisch gegenüber dem Drehfeld des Ständers verdreht.
55 Wirkungsprinzip der Synchronmaschine (III): Aufgrund der Auslegung der Wicklung des Ständers (Nutenzahl je Pol und Phase, Schrittverkürzung) und der Auslegung des Läufers (Wicklung des Vollpolläufers, Polschuhform des Schenkelpolläufers) wird angestrebt sinusförmige Luftspaltfelder des Ständers und Läufers zu erzeugen. Aufgrund der magnetischen Kopplung von Ständer und Läufer überlagern sich die Felder von Ständer und Läufer zum resultierenden Luftspaltfeld. Wie schon beim Transformator erarbeitet, führt diese Rückwirkung des Ständerluftspaltfeldes auf das Läuferluftspaltfeld zu einer Reduktion der Amplitude des resultierenden Luftspaltfeldes.
56 Wirkungsprinzip der Synchronmaschine (IV): Wird die magnetische Kopplung generatorisch oder motorisch belastet, so steigt die Amplitude des resultierenden Luftspaltfeldes. Wie schon beim Transformator erzeugt der Erregerstrom des Läufers (Gleichstrom) in Verbindung mit der synchronen Drehung des Läufers zum Ständer zu einem mechanisch erzeugten Drehfeld, das man sich analog zum Drehfeld des Ständers auch durch einen Wechselstrom erzeugt vorstellen kann.
57 Prinzipielle Herleitung des Ersatzschaltbildes (I): Ständerseite Läuferseite die in den Ständerspulen induzierte Spannung wird Polradspannung genannt die im jeweiligen Strang induzierte Spannung ist aufgrund der räumlichen Lage der Ständerspulensysteme der Stränge phasenverschoben (bei m=3 120 Grad) die induzierte Spannung hängt von n und I Err ab Erregergleichstrom erzeugt läuferseitig ein Luftspaltfeld, das stillsteht das Läufererregerfeld B 2 (x 2 ) ist nahezu sinusförmig von x 2 abhängig das Läufererregerfeld B 2 (x 2 ) ist ein Gleichfeld (nicht von t abhängig) das Läufererregerfeld ist vom Erregerstrom abhängig aufgrund der Drehung des Läufers im Ständer kann der Läufer in den feststehenden Ständerspulen eine Spannung induzieren.(dies entspricht dem Induktionsprozeß bei der Gleichstrommaschine ohne Kommutierung)
58 Prinzipielle Herleitung des Ersatzschaltbildes (II): Ständerseite Läuferseite aufgrund der synchronen Bewegung des Läufers im Ständer ist das Erregerfeld wie das Ständerfeld ein Drehfeld, das aufgrund der Zeit seinen Ort x 1 ändert wie das Ständerfeld kann man sich das auf den Ständer transformierte Erregerfeld durch einen Wechselstrom I Err erzeugt vorstellen zusätzlich baut das Drehstromsystem des Ständers aufgrund der Ständerwechselströme der m Stränge ein Ständerluftspaltfeld B 1 (x 1 ) auf, das abhängig von der Zeit seinen Ort x1 ändert B 1 (x 1 ) und B 2 (x 2 ) weisen aufgrund der Belastung eine mehr oder weniger große Phasenverschiebung auf B 1 (x 1 ) und B 2 (x 1 ) weisen aufgrund der Belastung eine Phasenverschiebung auf und können aufgrund der Synchronität zu einem resultierenden Luftspaltfeld B d (x 1 ) überlagert werden
59 Prinzipielle Herleitung des Ersatzschaltbildes (III): Ständerseite Läuferseite das resultierende Luftspaltfeld B d (x 1 ) kann analog zum Transformator durch einen Magnetisierungsstrom I m erzeugt betrachtet werden analog der Übertragung des Läuferfeldes auf die Ständerseite kann das Ständerfeld B 1 auf die Läuferseite übertragen werden analog zum Transformator entspricht das Ersatzschaltbild des Ständers der Synchronmaschine (bei fehlender Erregung) dem leerlaufenden Transformator (für eine Phase ohm scher Widerstand R 1, Streuinduktivität X 1s und Hauptinduktivität X h ) das auf die Läuferseite transformierte Ständerfeld B 1 ist ein Gleichfeld, das von x 2 abhängig ist auch auf der Läuferseite überlagern sich Ständerund Läuferfeld zum resultierenden Luftspaltfeld das auf die Läuferseite transformierte Ständerfeld kann bei Synchronität keine Spannung in die Erregerspulen induzieren, es erfolgt keine Rückwirkung
60 Prinzipielle Herleitung des Ersatzschaltbildes (III): Ständerseite Läuferseite hinzu kommt in Serie zur Hauptinduktivität die Polradspannung als Rückwirkung des Läufers auf den Ständer R 1 X 1s U Err U1 U res X h I Err R Err
61 Analogon zwischen Transformator und Synchronmaschine: Transformator im Leerlauf ohne Last R I 1 X 1s X 2s R 2 2 Synchronmaschine ohne Erregung R 1 X 1s I m U res X h U1 U res X h =0 Läufer steht still! Läufer dreht synchron! Hieraus folgt folgendes vereinfachtes Ersatzschaltbild: R 1 X 1s R 1 X 1s I m I 2 U res X h U1 U res X h
62 Beschreibung des Betriebsverhaltens der Synchronmaschine durch Zeigerdiagramme
63 Allgemeines lineares Zeigerdiagramm für übererregten Generatorbetrieb
64 Belastungsfall: Generatorbetrieb, übererregt
65 Belastungsfall: Generatorbetrieb, übererregt
66 Belastungsfall: Generatorbetrieb, übererregt
67 Belastungsfall: Generatorbetrieb, übererregt
68 Belastungsfall: Generatorbetrieb, übererregt
69 Belastungsfall: Generatorbetrieb, übererregt
70 Belastungsfall: Generatorbetrieb, übererregt
71 Belastungsfall: Generatorbetrieb, übererregt
72 Allgemeines lineares Zeigerdiagramm für untererregten Motorbetrieb
73 Belastungsfall: Motorbetrieb, untererregt
74 Belastungsfall: Motorbetrieb, untererregt
75 Belastungsfall: Motorbetrieb, untererregt
76 Belastungsfall: Motorbetrieb, untererregt
77 Belastungsfall: Motorbetrieb, untererregt
78 Belastungsfall: Motorbetrieb, untererregt
79 Belastungsfall: Motorbetrieb, untererregt
80 Belastungsfall: Motorbetrieb, untererregt
81
82 Beim allgemeinen Zeigerdiagramm ist zu beachten, daß bei großer Belastung X nichtlinear h abhängig zu I sein kann m
83 Bei Nichtlinearität ist über das Verfahren des Potierdreiecks zu verfahren
84 Bei rein linearen Betrachtungen können X 1s und X h zur synchronen Reaktanz zusammengefaßt werden
85 Herleitung der Stromortskurven der Synchronmaschine
86 Abhängigkeit von der Ständerspannung ohne Erregung
87 Ortskurven des Ständerstromes der Synchronmaschine = - j = - j j Für I E und damit =0 gilt: = -j + j = -j -j /
88 Ortskurven des Ständerstromes der Synchronmaschine Durch eine Vergrößerung oder Verkleinerung von verbleibt die Richtung von, er ist rein Induktiv. = -j + j = -j (größer) -j / -j (größer) / -j /
89 Synchronisation
90 Für die Herstellung einer Kopplung der Synchronmaschine an das Netz muß der mögliche Ausgleichsstrom unterbunden werden. Hierzu muß zu allen Zeitpunkten der Vektor der Klemmenspannung der Synchronmaschine mit dem Vektor der Netzspannung übereinstimmen. Dann ist der Strom Null und damit die Klemmenspannung der Synchronmaschine die Polradspannung. Hierzu müssen übereinstimmen: Betrag Frequenz Phasenlage Phasenfolge von Polradspannung und Netzspannung.
91 Die Synchronisationsbedingung werden eingestellt durch folgende Maßnahmen: Betrag Frequenz Phasenlage Phasenfolge über den Erregerstrom über die Drehzahl über zeitliche Drehzahländerung über Vertauschung von zwei Zuleitungen
92 Nach Einstellung aller Synchronisationsbedingungen kann die Verbindung zum Netz hergestellt werden.
93
94 Vergrößerung des Erregerstromes über den Leerlauferregerstrom hinaus
95 Ortskurven des Ständerstromes der Synchronmaschine Durch eine Vergrößerung von I E auf den Leerlauferregerstrom I E0 wird auf die Größe von erhöht bei gleicher Lage (Synchronisation) = -j + j + j / =0 -j /
96 Ortskurven des Ständerstromes der Synchronmaschine Durch weitere Vergrößerung von I E über den Leerlauferregerstrom I E0 hinaus wird über hinaus erhöht bei gleicher Lage (Übererregung) = -j + j + j / -j / wird kapazitiv
97 Verkleinerung des Erregerstromes unter den Leerlauferregerstrom hinaus
98 Ortskurven des Ständerstromes der Synchronmaschine Durch Verkleinerung von I E unter den Leerlauferregerstrom I E0 wird unter hinab verkleinert bei gleicher Lage (Untererregung) = -j + j + j / -j / wird induktiv
99 Verdrehung der Polradspannung gegenüber der Netzspannung bei voreilender Polradspannung
100 Ortskurven des Ständerstromes der Synchronmaschine Durch Beibehaltung von I E beim Leerlauferregerstrom I E0 und Verdrehung von in Richtung Voreilung gegenüber verdreht sich auch der Stromanteilung, der auf die Polradspannung zurückzuführen ist = -j + j -j / + j / ermöglicht Wirkleistungsabgabe und ist leicht induktiv
101 Verdrehung der Polradspannung gegenüber der Netzspannung bei nacheilender Polradspannung
102 Ortskurven des Ständerstromes der Synchronmaschine Durch Beibehaltung von I E beim Leerlauferregerstrom I E0 und Verdrehung von in Richtung Nacheilung gegenüber verdreht sich auch der Stromanteilung, der auf die Polradspannung zurückzuführen ist = -j + j I1 + j / -j / erzwingt Wirkleistungsaufnahme und ist leicht induktiv
103 Stromortskurven für konstante Polradspannung und unterschiedlichen Lastwinkel J
104 Ortskurven des Ständerstromes der Synchronmaschine Je nach Größe des Winkels, der die Vor- oder Nacheilung von gegenüber beschreibt, wandert der Stromanteil j / auf einer Kreisbahn um die Spitze des Stromanteils j / = -j + j I1 -j / + j / erzwingt Wirkleistungsaufnahme und ist leicht induktiv
105 Ortskurven des Ständerstromes der Synchronmaschine Je nach Größe des Winkels, der die Vor- oder Nacheilung von gegenüber beschreibt, wandert der Stromanteil j / auf einer Kreisbahn um die Spitze des Stromanteils j / = -j + j I1 + j / -j / + j / erzwingt Wirkleistungsaufnahme und ist leicht induktiv
106 Ortskurven des Ständerstromes der Synchronmaschine Je nach Größe des Winkels, der die Vor- oder Nacheilung von gegenüber beschreibt, wandert der Stromanteil j / auf einer Kreisbahn um die Spitze des Stromanteils j / = -j + j I1 + j / + j / -j / + j / erzwingt Wirkleistungsaufnahme und ist leicht induktiv
107 Ortskurven des Ständerstromes der Synchronmaschine Je nach Größe des Winkels, der die Vor- oder Nacheilung von gegenüber beschreibt, wandert der Stromanteil j / auf einer Kreisbahn um die Spitze des Stromanteils j / = -j + j + j / I1 + j / -j / + j / + j / erzwingt Wirkleistungsaufnahme und ist leicht induktiv
108 Ortskurven des Ständerstromes der Synchronmaschine Je nach Größe des Winkels, der die Vor- oder Nacheilung von gegenüber beschreibt, wandert der Stromanteil j / auf einer Kreisbahn um die Spitze des Stromanteils j / = -j + j + j / I1 + j / -j / + j / + j / + j / erzwingt Wirkleistungsaufnahme und ist leicht induktiv
109 Ortskurven des Ständerstromes der Synchronmaschine Je nach Größe des Winkels, der die Vor- oder Nacheilung von gegenüber beschreibt, wandert der Stromanteil j / auf einer Kreisbahn um die Spitze des Stromanteils j / = -j + j + j / I1 + j / -j / + j / + j / + j / erzwingt Wirkleistungsaufnahme und ist leicht induktiv
110 Ortskurven des Ständerstromes der Synchronmaschine Je nach Größe des Winkels, der die Vor- oder Nacheilung von gegenüber beschreibt, wandert der Stromanteil j / auf einer Kreisbahn um die Spitze des Stromanteils j / = -j + j + j / I1 + j / -j / + j / + j / X + j U d P / + j / erzwingt Wirkleistungsaufnahme und ist leicht induktiv
111 Ortskurven des Ständerstromes der Synchronmaschine Je nach Größe des Winkels, der die Vor- oder Nacheilung von gegenüber beschreibt, wandert der Stromanteil j / auf einer Kreisbahn um die Spitze des Stromanteils j / = -j + j I1 -j / + j x / Einhüllende der Spitzen Von j x / erzwingt Wirkleistungsaufnahme oder -abgabe und ist leicht induktiv
112 Ortskurven des Ständerstromes der Synchronmaschine Je nach Größe des Winkels, der die Vor- oder Nacheilung von gegenüber beschreibt, wandert der Stromanteil j / auf einer Kreisbahn um die Spitze des Stromanteils j /. Durch Verkleinerung von I E wird verkleinert. = -j + j -j / + j / erzwingt Wirkleistungsaufnahme und ist bei vergleichbarem Polradwinkel stärker induktiv
113 Ortskurven des Ständerstromes der Synchronmaschine Je nach Größe des Winkels, der die Vor- oder Nacheilung von gegenüber beschreibt, wandert der Stromanteil j / auf einer Kreisbahn um die Spitze des Stromanteils j /. Durch Verkleinerung von I E wird verkleinert. = -j + j + j / I1 + j / -j / + j / + j / X + j U d P / + j /
114 Ortskurven des Ständerstromes der Synchronmaschine Je nach Größe des Winkels, der die Vor- oder Nacheilung von gegenüber beschreibt, wandert der Stromanteil j / auf einer Kreisbahn um die Spitze des Stromanteils j / mit kleinerem Radius = -j + j + j / + j / -j / + j / + j / X + j U d P / + j / Einhüllende der Spitzen Von j U x P /
115 Ortskurven des Ständerstromes der Synchronmaschine Je nach Größe des Winkels, der die Vor- oder Nacheilung von gegenüber beschreibt, wandert der Stromanteil j / auf einer Kreisbahn um die Spitze des Stromanteils j /. Durch Vergrößerung von I E wird vergrößert. = -j + j -j / + j / erzwingt Wirkleistungsaufnahme und ist kapazitiv
116 Ortskurven des Ständerstromes der Synchronmaschine Je nach Größe des Winkels, der die Vor- oder Nacheilung von gegenüber beschreibt, wandert der Stromanteil j / auf einer Kreisbahn um die Spitze des Stromanteils j / = -j + j + j x / I1 -j / Einhüllende der Spitzen Von j U x P / erzwingt Wirkleistungsaufnahme oder -abgabe und ist I überwiegend induktiv, 1 ab bestimmten Polradwinkelgrößen kapazitiv
117 Ortskurven des Ständerstromes der Synchronmaschine erzwingt Wirkleistungsaufnahme oder -abgabe und ist überwiegend induktiv, ab bestimmten Polradwinkelgrößen kapazitiv Wirkleistungsaufnahme = Wirkleistungsaufnahme -j + j Induktive Blindleistungsabgabe Induktive Blindleistungsaufnahme + j x / Einhüllende der Spitzen Wirkleistungsabgabe Induktive Blindleistungsabgabe -j / Wirkleistungsabgabe Induktive Blindleistungsaufnahme Von j x /
118 Ortskurven des Ständerstromes der Synchronmaschine erzwingt Wirkleistungsaufnahme oder -abgabe und ist überwiegend induktiv, ab bestimmten Polradwinkelgrößen kapazitiv Wirkleistungsaufnahme = Wirkleistungsaufnahme -j + j Induktive Blindleistungsabgabe Wirkleistungsabgabe Induktive Blindleistungsabgabe -j / Induktive Blindleistungsaufnahme Wirkleistungsabgabe Induktive Blindleistungsaufnahme Einhüllende der Spitzen Von j U x P / für 100 %, 70 % und 130 % von I E bezogen auf I E0
119 Stromortskurven für konstante Wirkleistungs- -abgabe oder -aufnahme
120 Ortskurven des Ständerstromes der Synchronmaschine Durch Projektion von auf die Ständerspannung erhält man die Wirkleistung zum Betriebspunkt = -j + j Projektionslinie W I1 -j / + j /
121 Ortskurven des Ständerstromes der Synchronmaschine Auf der nach links und rechts verlängerten Projektionslinie liegen alle Stromzeiger, die dieselbe Wirkleistungsbilanz haben = -j + j P W =konst W + j / -j /
122 Ortskurven des Ständerstromes der Synchronmaschine Bei konstanter Netzspannung sind für jeden Stromvektor Polradspannungen erforderlich, die sich hinsichtlich Polradspannungshöhe unterscheiden. = -j + j I I P 1 P W =konst + j / W -j / Alle Polradspannungen x haben unterschiedlichen Polradwinkel q zu (aufgrund des Phasenwinkels f), sie liegen auf einer Senkrechten zur Projektionslinie.
123 Ableitung der V-Kurven (Belastungskurven) aus den Stromortskurven für konstante Wirkleistungs- -abgabe oder -aufnahme
124 Belastungskurven der Synchronmaschine (V-Kurven) Trägt man für konstante Wirkleistung den Betrag des Ständerstromes über dem zugehörigen Erregerstrom (Polradspannung) auf, so erhält man die Belastungskurven. = -j + j I I P 1 P W =konst + j / W -j / 1. Belastungspunkt
125 Belastungskurven der Synchronmaschine (V-Kurven) Trägt man für konstante Wirkleistung den Betrag des Ständerstromes über dem zugehörigen Erregerstrom (Polradspannung) auf, so erhält man die Belastungskurven. = -j + j I I P 1 P W =konst + j / W -j / 2. Belastungspunkt 1. Belastungspunkt
126 Belastungskurven der Synchronmaschine (V-Kurven) Trägt man für konstante Wirkleistung den Betrag des Ständerstromes über dem zugehörigen Erregerstrom (Polradspannung) auf, so erhält man die Belastungskurven. = -j + j I I P 1 P W =konst W + j / -j / 3. Belastungspunkt 2. Belastungspunkt 1. Belastungspunkt
127 Belastungskurven der Synchronmaschine (V-Kurven) Trägt man für konstante Wirkleistung den Betrag des Ständerstromes über dem zugehörigen Erregerstrom (Polradspannung) auf, so erhält man die Belastungskurven. = -j + j P W =konst I I P 1 4. Belastungspunkt W + j / -j / 3. Belastungspunkt 2. Belastungspunkt 1. Belastungspunkt
128 Belastungskurven der Synchronmaschine (V-Kurven) Trägt man für konstante Wirkleistung den Betrag des Ständerstromes über dem zugehörigen Erregerstrom (Polradspannung) auf, so erhält man die Belastungskurven. = -j + j P W =konst I I P 1 4. Belastungspunkt W + j / -j / 3. Belastungspunkt 2. Belastungspunkt 5. Belastungspun 1. Belastungspunkt
129 Belastungskurven der Synchronmaschine (V-Kurven) Trägt man für konstante Wirkleistung den Betrag des Ständerstromes über dem zugehörigen Erregerstrom (Polradspannung) auf, so erhält man die Belastungskurven. = -j + j P W =konst I I P 1 4. Belastungspunkt 6. Belastungspunkt W + j / -j / 3. Belastungspunkt 2. Belastungspunkt 5. Belastungspun 1. Belastungspunkt
130 Belastungskurven der Synchronmaschine (V-Kurven) Trägt man für konstante Wirkleistung den Betrag des Ständerstromes über dem zugehörigen Erregerstrom (Polradspannung) auf, so erhält man die Belastungskurven. = -j + j P W =konst I I P 1 4. Belastungspunkt 6. Belastungspunkt W -j / + j / 3. Belastungspunkt 2. Belastungspunkt P W =konst 5. Belastungspun 1. Belastungspunkt
131 Belastungskurven der Synchronmaschine (V-Kurven) Trägt man für konstante Wirkleistung den Betrag des Ständerstromes über dem zugehörigen Erregerstrom (Polradspannung) auf, so erhält man die Belastungskurven. = -j + j P W =konst I I P 1 4. Belastungspunkt 6. Belastungspunkt W -j / + j / 3. Belastungspunkt 2. Belastungspunkt P W =konst 5. Belastungspun 1. Belastungspunkt 0
132 Belastungskurven der Synchronmaschine (V-Kurven) Trägt man für konstante Wirkleistung den Betrag des Ständerstromes über dem zugehörigen Erregerstrom (Polradspannung) auf, so erhält man die Belastungskurven. = -j + j P W =konst I I P 1 W -j / + j / P W =konst 2. Belastungsp 1. Belastungspunkt
133 Belastungskurven der Synchronmaschine (V-Kurven) Trägt man für konstante Wirkleistung den Betrag des Ständerstromes über dem zugehörigen Erregerstrom (Polradspannung) auf, so erhält man die Belastungskurven. = -j + j P W =konst I I P 1 W -j / + j / P W =konst 3. Belastungspunkt 2. Belastungsp 1. Belastungspunkt
134 Belastungskurven der Synchronmaschine (V-Kurven) Trägt man für konstante Wirkleistung den Betrag des Ständerstromes über dem zugehörigen Erregerstrom (Polradspannung) auf, so erhält man die Belastungskurven. = -j + j P W =konst I I P 1 W -j / + j / P W =konst 3. Belastungspunkt 2. Belastungsp P W =0 1. Belastungspunkt
135 Belastungskurven der Synchronmaschine (V-Kurven) Trägt man für konstante Wirkleistung den Betrag des Ständerstromes über dem zugehörigen Erregerstrom (Polradspannung) auf, so erhält man die Belastungskurven. = -j + j P W =konst I I P 1 W -j / + j / P W =konst P W =0 I E
136 Allgemeines lineares Zeigerdiagramm für nichtlineare Verhältnisse (Potierdreieck)
137 Potierdreieck Ausgangslage: übererregt rein induktive Blindleistungsabgabe
138 Potierdreieck übererregt rein induktive Blindleistungsabgabe Spannungsabfall an X 1s liefert j X 1s (nicht nichtlinear, d.h. X 1s nicht von Belastung abhängig!) j X 1s j X 1s
139 Potierdreieck übererregt rein induktive Blindleistungsabgabe j X 1s von abgezogen liefert U res j X 1s U res j X 1s
140 übererregt Potierdreieck rein induktive Blindleistungsabgabe U res wird von I m erzeugt und steht senkrecht hierauf (U res hängt nichtlinear von I m ab) j X 1s U res I m j X 1s
141 übererregt Potierdreieck rein induktive Blindleistungsabgabe ist auf die Ständerseite bezogen und wird auf die Läuferseite transformiert und wird damit (Windungszahlverhältnis!) j X 1s U res I m j X 1s
142 übererregt Potierdreieck rein induktive Blindleistungsabgabe von I m abgezogen ergibt den dafür erforderlichen Erregerstrom I E (auf Läuferseite bezogen) j X 1s U res I E I m j X 1s
143 Potierdreieck übererregt rein induktive Blindleistungsabgabe I E erzeugt zugehörige Polradspannung und ist hiervon linear abhängig. Die tatsächlichen Feldverhältnisse werden vom Magnetisierungsstrom bestimmt! Linearisierung der Kennlinie für Magnetisierungsstrom! U res j X 1s I m I E j X 1s
144 Potierdreieck übererregt rein induktive Blindleistungsabgabe Linearisierung der Kennlinie für Magnetisierungsstrom! U res j X 1s I m I Ecof=0 j X 1s
145 Potierdreieck übererregt rein induktive Blindleistungsabgabe für Ständernennstrom N Linearisierung der Kennlinie für Magnetisierungsstrom! U res j X 1s N N N I m j X 1s N I Ecof=0 N
146 Merke: Im induktiven Belastungspunkt, d.h. wenn die Synchronmaschine reine Blindleistung an das Netz abgibt, liegt die aus der Linearisierung ermittelte zum Erregerstrom I E gehörende Polradspannung nahezu an der derselben Stelle wie bei Ermittlung aus der Magnetisierungskennlinie!
147 Potierdreieck für Kurzschluß: übererregt eigene Induktivitäten müssen versorgt werden wie rein induktive Blindleistungsabgabe = 0
148 Potierdreieck für Kurzschluß: Spannungsabfall an X 1s liefert j X 1s (nicht nichtlinear, d.h. X 1s nicht von Belastung abhängig!) j X 1s j X 1s
149 Potierdreieck für Kurzschluß: j X 1s von (=0) abgezogen liefert U res U res j X 1s j X 1s
150 Potierdreieck für Kurzschluß: U res wird von I m erzeugt und steht senkrecht hierauf! (U res hängt nichtlinear von I m ab!) Im Falle eines Kurzschlusses befindet man sich im linearen Bereich der Kennlinie! U res j X 1s I m j X 1s
151 Potierdreieck für Kurzschluß: ist auf die Ständerseite bezogen und wird auf die Läuferseite transformiert und wird damit (Windungszahlverhältnis!) U res j X 1s I m j X 1s
152 Potierdreieck für Kurzschluß: von I m abgezogen ergibt den dafür erforderlichen Erregerstrom I E (auf Läuferseite bezogen) I E U res I m j X 1s
153 Potierdreieck für Kurzschluß: Linearisierung der Kennlinie für Magnetisierungsstrom! I E erzeugt zugehörige Polradspannung und ist hiervon abhängig U res I E I m I 1 j X 1s
154 Potierdreieck für Kurzschluß: I E erzeugt zugehörige Polradspannung und ist hiervon nichtlinear abhängig (2. Weg: Verfolgung der Magnetisierungskennlinie) U res I E I m I 1 j X 1s
155 Merke: Im Kurzschluß bestimmt das vom virtuell gedachten Magnetisierungsstrom Im erzeugte resultierende Magnetfeld die tatsächlichen Feldverhältnisse. D.h. durch die starke Dämpfung des Erregerfeldes durch das Ständerfeld ist das resultierende Magnetfeld sehr klein und liegt im Bereich der Linearität der magnetischen Kennlinie. Durch Rückermittlung der Polradspannung aus dem ermittelten Erregerstrom I E ergeben sich somit bei Verwendung der linearisierten Kennlinie im Bereich des Magnetisierungsstromes I m und der tatsächlichen Magnetisierungskennlinie starke Unterschiede. Der korrekte Wert wird nahe bei der Linearisierung liegen. Rückgeschlossen werden kann nicht über die Ver- längerung des Spannungsabfalls an X 1s
156 Merke: Korrekt bestimmt werden kann im Kurzschluß nur der erforderliche Erregerstrom I EKN.
157 Potierdreieck Linearisierung der Kennlinie für Magnetisierungsstrom! für Kurzschluß für Ständernennstrom N U res N I m I E N j X 1s N
158 Potierdreieck für Kurzschluß für Ständernennstrom N U res N I EKN N I m j X 1s N
159 Potierdreieck für Kurzschluß für Ständernennstrom N Potierdreieck für Nennstrom N im Kurzschluß U res N j X 1s N N I m I EKN
160 Potierdreieck übererregt rein induktive Blindleistungsabgabe für Ständernennstrom N Linearisierung der Kennlinie für Magnetisierungsstrom! U res j X 1s N N j X 1s N N I EKN N I m I EKN N j X 1s II m1n j X 1s N I Ecof=0 N
161 Potierdreieck Ausgangslage: Beliebige Belastung
162 Potierdreieck Beliebige Belastung Spannungsabfall an X 1s liefert j X 1s (nicht nichtlinear, d.h. X 1s nicht von Belastung abhängig!) j X 1s j X 1s
163 Potierdreieck Beliebige Belastung j X 1s von abgezogen liefert U res j X 1s U res j X 1s
164 Potierdreieck Beliebige Belastung Entscheidend für die Ermittlung des zugehörigen Magnetisierungsstromes I m ist der Betrag von U res (Länge des Pfeiles) j X 1s U res j X 1s
165 Potierdreieck Beliebige Belastung U res wird von I m erzeugt und steht senkrecht hierauf (U res hängt nichtlinear von I m ab) j X 1s U res Richtung von I m j X 1s
166 Potierdreieck Beliebige Belastung Der Betrag von I m in Abhängigkeit von Ures ergibt sich durch Loten an der Magnetisierungskennlinie j X 1s U res Betrag von I m Richtung von I m j X 1s
167 Potierdreieck Beliebige Belastung Die Richtung von I m ergibt sich durch einen Vektor rechtwinklig zu U res j X 1s U res I m j X 1s
168 Potierdreieck Beliebige Belastung ist auf die Ständerseite bezogen und wird auf die Läuferseite transformiert und wird damit (Windungszahlverhältnis!) j X 1s U res I m j X 1s
169 Potierdreieck Beliebige Belastung von I m abgezogen ergibt den dafür erforderlichen Erregerstrom I E (auf Läuferseite bezogen) j X 1s U res I m I E j X 1s
170 Potierdreieck Beliebige Belastung I E erzeugt zugehörige Polradspannung und ist hiervon abhängig. steht senkrecht auf I E (nur Richtung) j X 1s U res I m I E j X 1s
171 Potierdreieck Beliebige Belastung Der Betrag von ergibt sich aus der Verlängerung des Spannungsabfalls an X 1s, da der Spannungsabfall an X h in derselben Richtung liegt (nur Richtung) j X 1s U res I m I E j X 1s
172 Potierdreieck Beliebige Belastung Der Betrag von ergibt sich aus der Verlängerung des Spannungsabfalls an X 1s, da der Spannungsabfall an X h in derselben Richtung liegt j X 1s U res I m I E j X 1s
173 Potierdreieck Beliebige Belastung Linearisierung ab U res j X 1s U res I m I E j X 1s
174 Merke: Damit entspricht die ermittelte Polradspannung der Linearisierung an der Magnetisierungskennlinie beim Magnetisierungsstrom I m.
175 Potierdreieck Beliebige Belastung Zweiter Weg zur Ermittlung der Polradspannung durch Verwendung der Magnetisierungskennlinie j X 1s (nur Richtung) U res I m I E j X 1s
176 Potierdreieck Beliebige Belastung Ergebnis des Lotens an der Magnetisierungskennlinie ist der Betrag von und damit mit der Richtung zusammen der zugehörige Vektor j X 1s U res I m I E j X 1s
177 Merke: Die durch Linearisierung und Verfolgung der Magnetisierungskennlinie ergeben stark unterschiedliche Polradspannungen, durch dieses etwas unsichere Verfahren kann somit auch der Polradwinkel falsch ermittelt werden. Insbesondere ist jedoch auch die ermittelte Hauptinduktivität und damit die synchrone Reaktanz stark unterschiedlich.
178 Potierdreieck Beliebige Belastung Einbeschreibung des Potierdreiecks bei Weg 2 Potierdreieck für beliebigen Strom j X 1s U res I m I E j X 1s
179 Ermittlung des Potierdreiecks
180 Ermittlung des Potierdreiecks Ausgangslage: übererregt rein induktive Blindleistungsabgabe Erregerstrom so groß, daß gewünschter Ankerstrom fließt (im allgemeinen N ) N N
181 Ermittlung des Potierdreiecks Spannungsabfall an X 1s liefert j X 1s N (nicht nichtlinear, d.h. X 1s nicht von Belastung abhängig!) j X 1s N N N j X 1s N
182 Ermittlung des Potierdreiecks j X 1s N von N abgezogen liefert U res j X 1s N U res N N j X 1s N
183 Ermittlung des Potierdreiecks Zu U res läßt sich der erforderliche Magnetisierungsstrom I m durch Loten an der Magnetisierungskennlinie ermitteln j X 1s N U res N I m N j X 1s N
184 Ermittlung des Potierdreiecks An I m direkt der auf die Erregerseite transformierte Ständerstrom N abgetragen, um I E zu erhalten j X 1s N U res N I m N N j X 1s N
185 Ermittlung des Potierdreiecks An I m direkt der auf die Erregerseite transformierte Ständerstrom N abgetragen, um I E zu erhalten j X 1s N U res N I m N N j X 1s N I E
186 Ermittlung des Potierdreiecks Dieser durch Messung ermittelbare Erregerstrom I E ist der Erregerstrom I Ecosf=0 j X 1s N U res N I m N N j X 1s N I Ecosf=0
187 Ermittlung des Potierdreiecks Durch Parallelverschiebung von I Ecosf=0 an die Spitze von N ergibt sich Punkt A j X 1s N I Ecosf=0 U res N Punkt A! I m N N j X 1s N I Ecosf=0
188 Ermittlung des Potierdreiecks Im Kurzschluß ist rein induktiv, Verhalten wie induktiver Belastungspunkt (wegen Stromrichtung), ermittelt wird für Nennstrom I Ecosf=0 N Punkt A! N j X 1s N
189 Ermittlung des Potierdreiecks Da =0 ergibt sich direkt U res I Ecosf=0 Punkt A! U res j X 1s N N j X 1s N
190 Ermittlung des Potierdreiecks Loten an der Leerlaufkennlinie ergibt den erforderlichen Magnetisierungsstrom I m, dieser ist sehr klein, weil im Kurzschluß stark gedämpft I Ecosf=0 Punkt A! U res N I m j X 1s N j X 1s N
191 Ermittlung des Potierdreiecks N wird auf die Erregerseite als N transformiert und an I m abgetragen I Ecosf=0 Punkt A! j X 1s N U res I m N N j X 1s N
192 Ermittlung des Potierdreiecks Meßbar ist im Kurzschluß bei Nennständerstrom N der zugehörige Erregerstrom I EKN I Ecosf=0 Punkt A! j X 1s N U res I m N N j X 1s N I EKN
193 Ermittlung des Potierdreiecks Das Ende von I EKN wird der Punkt B I Ecosf=0 Punkt A! j X 1s N U res I m N Punkt B! N j X 1s N I EKN
194 Ermittlung des Potierdreiecks Die Länge von I EKN und damit die Strecke vom Ursprung zum Punkt B ist die Basis, auf der das Potierdreieck liegt und liegt somit auch vom Punkt A nach links. Damit wird I EKN vom Punkt A nach links abgetragen und ergibt Punkt C. I EKN I Ecosf=0 Punkt C! Punkt A! j X 1s N U res I m N Punkt B! N j X 1s N I EKN
195 Ermittlung des Potierdreiecks Die Höhe des Potierdreiecks und damit j X 1s N, bzw. j X P N ergibt sich aus der Überlegung, daß I EKN im Kurzschluß für quasi lineare Verhältnisse ermittelt wird und somit die Anfangssteigung der Magnetisierungskurve an dem Anfang von I EKN parallelverschoben eingetragen wird. Der Schnittpunkt mit der Magnetisierungskennlinie I EKN ergibt die Höhe des Potierdreiecks. I Ecosf=0 Punkt A! j X 1s N U res I m N Punkt B! N j X 1s N I EKN
196 Ermittlung des Potierdreiecks Der Schnittpunkt mit der Magnetisierungskennlinie ergibt die Höhe des Potierdreiecks. I EKN I Ecosf=0 Betrag von j X 1s N ist die Potierdreieckshöhe Punkt A! j X 1s N U res I m N Punkt B! N j X 1s N I EKN
197 Ermittlung des Potierdreiecks Damit ergibt sich für Nennstrom ermittelt das Potierdreieck. I EKN I Ecosf=0 Betrag von j X 1s N ist die Potierdreieckshöhe Punkt A! j X 1s N U res I m N Punkt B! N j X 1s N I EKN
198 Ermittlung des Potierdreiecks Die Katheten des Potierdreiecks für Nennstrom sind X P * N und N. Die Rektanz erhält den Namen X P, da die tatsächlich ermittelten Werte leicht von X 1s unterschiedlich sind. N X P N Punkt A! j X 1s N U res I m N Punkt B! N j X 1s N I EKN
199 Anwendung des Potierdreiecks Das ermittelte Potierdreieck und somit die dazugehörigen Katheten können auf jeden beliebigen Ständerstrom umgerechnet werden, die Katheten werden proportional vergrößert. X P N
200 Anwendung des Potierdreiecks Mit dem in der Größe veränderten Dreieck ergibt sich bei gegebener Ständerspannung (hier verbleibt N ) die neue Lage an der Magnetisierungskennlinie und somit U res und I E. X P U res N I E
201 Anwendung des Potierdreiecks Aus Lage und Betrag von I E kann abschließen bestimmt werden. X P U res N I E
202 Anwendung des Potierdreiecks Das Verfahren kann durch Übertragen von Beträgen auch auf beliebige Belastungszustände angewendet werden. X P U res N I E
203 Ein- bis mehrphasiger Kurzschluß
204
205
206 Drehmoment- Lastwinkelabhängigkeit
207
208 Lastabhängigkeit im Inselbetrieb
209
210
Elektrische Maschinen
 Vorlesung Elektrische Maschinen Seite 0 Vorlesung Elektrische Maschinen Fachhochschule Dortmund FB 3 Dr. Bernd Aschendorf SS 08 Vorlesung Elektrische Maschinen Seite 1 5. Synchronmaschine 5.1 Allgemeines
Vorlesung Elektrische Maschinen Seite 0 Vorlesung Elektrische Maschinen Fachhochschule Dortmund FB 3 Dr. Bernd Aschendorf SS 08 Vorlesung Elektrische Maschinen Seite 1 5. Synchronmaschine 5.1 Allgemeines
Theoretische Grundlagen
 Theoretische Grundlagen Synchronmaschinen (SyM) werden im Ständer mit einer dreisträngigen Drehstromwicklung ausgeführt. Aus der Frequenzgleichung der Drehfeldmaschinen, f 2 = s f 1 = (1- n p/f 1 ) f 1
Theoretische Grundlagen Synchronmaschinen (SyM) werden im Ständer mit einer dreisträngigen Drehstromwicklung ausgeführt. Aus der Frequenzgleichung der Drehfeldmaschinen, f 2 = s f 1 = (1- n p/f 1 ) f 1
Versuchs-Datum: Semester: Gruppe: Testat:
 Labor: Elektrische Maschinen 1 Fakultät ME Labor: Elektrische Antriebstechnik Versuch EM1-5: Synchronmaschine Versuchs-Datum: Semester: Gruppe: Protokoll: Testat: Bericht: Datum: 1. Versuchsziel Bei diesem
Labor: Elektrische Maschinen 1 Fakultät ME Labor: Elektrische Antriebstechnik Versuch EM1-5: Synchronmaschine Versuchs-Datum: Semester: Gruppe: Protokoll: Testat: Bericht: Datum: 1. Versuchsziel Bei diesem
Prinzipielle Herleitung des Ersatzschaltbildes. aus Transformator und Synchronmaschine und der Stromortskurve
 Prinzipielle Herleitung des Ersatzschaltbildes der Asynchronmaschine aus Transformator und Synchronmaschine und der Stromortskurve Transformator Synchronmaschine I 1 R I 1 X 1s X 2s R 2 2 I 1 R 1 X 1s
Prinzipielle Herleitung des Ersatzschaltbildes der Asynchronmaschine aus Transformator und Synchronmaschine und der Stromortskurve Transformator Synchronmaschine I 1 R I 1 X 1s X 2s R 2 2 I 1 R 1 X 1s
Luftspaltfeld und zugehörige Spannungen
 5.2: SM: Wirkungsweise Seite 1 Zur Beschreibung der charakteristischen Eigenschaften der Synchronmaschine werden folgende Vereinbarungen getroffen: Vollpolmaschine am starren Netz, Ankerwicklung ohne ohmschen
5.2: SM: Wirkungsweise Seite 1 Zur Beschreibung der charakteristischen Eigenschaften der Synchronmaschine werden folgende Vereinbarungen getroffen: Vollpolmaschine am starren Netz, Ankerwicklung ohne ohmschen
Fachpraktikum Elektrische Maschinen. Versuch 2: Synchronmaschine
 Fachpraktikum Elektrische Maschinen Versuch 2: Synchronmaschine Theorie & Fragen Basierend auf den Unterlagen von LD Didactic Entwickelt von Thomas Reichert am Institut von Prof. J. W. Kolar Februar 2013
Fachpraktikum Elektrische Maschinen Versuch 2: Synchronmaschine Theorie & Fragen Basierend auf den Unterlagen von LD Didactic Entwickelt von Thomas Reichert am Institut von Prof. J. W. Kolar Februar 2013
Tutorium V: Musterlösung
 Tutorium V: Musterlösung 1 Fragen zur Synchronmaschine 1. Bei der Synchronmaschine wird wie bei der Asynchronmaschiene im Ständer ein Drehfeld erzeugt. Der Läufer besteht nun aus einem elektrisch oder
Tutorium V: Musterlösung 1 Fragen zur Synchronmaschine 1. Bei der Synchronmaschine wird wie bei der Asynchronmaschiene im Ständer ein Drehfeld erzeugt. Der Läufer besteht nun aus einem elektrisch oder
Machines Electriques Elektrische Maschinen. Synchronmaschinen
 Machines Electriques Elektrische Maschinen Synchronmaschinen Inhalt 1 Einleitung... 3 2 Aufbau und Arten... 3 2.1 Die Außenpolmaschine... 3 2.2 Die Innenpolmaschine... 3 2.2.1 Der Ständer... 3 2.2.2 Der
Machines Electriques Elektrische Maschinen Synchronmaschinen Inhalt 1 Einleitung... 3 2 Aufbau und Arten... 3 2.1 Die Außenpolmaschine... 3 2.2 Die Innenpolmaschine... 3 2.2.1 Der Ständer... 3 2.2.2 Der
Fachhochschule Bielefeld Praktikum Versuch 1. Prof. Dr.-Ing. Hofer EM 1 GM FB Ingenieurwissenschaften Elektrische Maschinen. Gleichstrommaschine
 Trafo Fachhochschule Bielefeld Praktikum Versuch 1 Gleichstrommaschine Versuchsaufgabe: Die hier zu untersuchende fremderregte Gleichstrommaschine (GM) wird im Verbund mit einer Drehstromasynchronmaschine
Trafo Fachhochschule Bielefeld Praktikum Versuch 1 Gleichstrommaschine Versuchsaufgabe: Die hier zu untersuchende fremderregte Gleichstrommaschine (GM) wird im Verbund mit einer Drehstromasynchronmaschine
Elektrische Maschinen
 Eckhard Spring Elektrische Maschinen Eine Einführung 2., durchgesehenfe'auflage Mit 229 Abbildungen fyj. Springer Die elektrischen Maschinen Eine Kurzgeschichte der elektrischen Energietechnik 1 1 Gleichstrommaschine
Eckhard Spring Elektrische Maschinen Eine Einführung 2., durchgesehenfe'auflage Mit 229 Abbildungen fyj. Springer Die elektrischen Maschinen Eine Kurzgeschichte der elektrischen Energietechnik 1 1 Gleichstrommaschine
Versuch EMA 4. (Praktikum)
") FH Stralsund Fachbereich Elektrotechnik Praktikum im Fach Elektrische Maschinen Versuch EMA 4 (Praktikum) Drehstrom-Synchronmaschine I Versuchsziel: Aneignung von Kenntnisse über Wirkungsweise und Betriebsverhalten
FH Stralsund Fachbereich Elektrotechnik Praktikum im Fach Elektrische Maschinen Versuch EMA 4 (Praktikum) Drehstrom-Synchronmaschine I Versuchsziel: Aneignung von Kenntnisse über Wirkungsweise und Betriebsverhalten
Versuchsprotokoll zum Versuch Nr. 2 Messungen am Generator
 Ein Generator ist das Gegenstück zum Motor. Mit ihm ist es möglich mech. Energie in elektrische umzuwandeln. Beim Generator dreht sich in einem Magnetfeld eine Leiterschleife (Spule), wodurch ein Strom
Ein Generator ist das Gegenstück zum Motor. Mit ihm ist es möglich mech. Energie in elektrische umzuwandeln. Beim Generator dreht sich in einem Magnetfeld eine Leiterschleife (Spule), wodurch ein Strom
Synchron-Schenkelpolmaschine Aufbau
 Synchron-Schenkelolmaschine Aufbau Drehstrom I s in Ständerwicklung erzeugt Drehfeld (hier 12 Pole). 12 Erregersulen im Läufer ( Polrad ) über Schleifringe mit Gleichstrom ( Feldstrom I f ) erregt. Es
Synchron-Schenkelolmaschine Aufbau Drehstrom I s in Ständerwicklung erzeugt Drehfeld (hier 12 Pole). 12 Erregersulen im Läufer ( Polrad ) über Schleifringe mit Gleichstrom ( Feldstrom I f ) erregt. Es
Drehstromasynchronmaschine
 Trafo Fachhochschule Bielefeld Praktikum Versuch 3 Drehstromasynchronmaschine Versuchsaufgabe: Die zu untersuchende Drehstromasynchronmaschine (DAM) wird im Verbund mit einer fremderregten Gleichstrommaschine
Trafo Fachhochschule Bielefeld Praktikum Versuch 3 Drehstromasynchronmaschine Versuchsaufgabe: Die zu untersuchende Drehstromasynchronmaschine (DAM) wird im Verbund mit einer fremderregten Gleichstrommaschine
Versuch EMA 4. (Praktikum)
") FH Stralsund Fachbereich Elektrotechnik Praktikum im Fach Elektrische Maschinen Versuch EMA 4 (Praktikum) Drehstrom-Synchronmaschine I Versuchsziel: Aneignung von Kenntnisse über Wirkungsweise und Betriebsverhalten
FH Stralsund Fachbereich Elektrotechnik Praktikum im Fach Elektrische Maschinen Versuch EMA 4 (Praktikum) Drehstrom-Synchronmaschine I Versuchsziel: Aneignung von Kenntnisse über Wirkungsweise und Betriebsverhalten
Die Gleichstrommaschine. Theorie
 Die Gleichstrommaschine Theorie 2 Inhaltsverzeichnis Inhaltsverzeichnis 1 Grundprinzip... 3 1.1 Kanalisierung des Magnetfeldes durch Polschuhe... 4 1.2 Kommutator... 5 1.3 Rotor mit vielen Leiterschleifen...
Die Gleichstrommaschine Theorie 2 Inhaltsverzeichnis Inhaltsverzeichnis 1 Grundprinzip... 3 1.1 Kanalisierung des Magnetfeldes durch Polschuhe... 4 1.2 Kommutator... 5 1.3 Rotor mit vielen Leiterschleifen...
9 Drehstromasynchronmaschine
 Mehr Informationen zum Titel 9 Drehstromasynchronmaschine Die Drehstromasynchronmaschine wird hauptsächlich als Motor eingesetzt und spielt eine wichtige Rolle im Bereich der elektrischen Antriebstechnik.
Mehr Informationen zum Titel 9 Drehstromasynchronmaschine Die Drehstromasynchronmaschine wird hauptsächlich als Motor eingesetzt und spielt eine wichtige Rolle im Bereich der elektrischen Antriebstechnik.
Elektrotechnik für Maschinenbauer. Grundlagen der Elektrotechnik für Maschinenbauer Konsultation 12: Elektrische Maschinen
 Grundlagen der Konsultation 12: Elektrische aschinen 1. Einleitung Bei den elektrischen aschinen unterscheidet man Transformatoren, Gleichstrommaschinen, Asynchronmaschinen und Synchronmaschinen. Daneben
Grundlagen der Konsultation 12: Elektrische aschinen 1. Einleitung Bei den elektrischen aschinen unterscheidet man Transformatoren, Gleichstrommaschinen, Asynchronmaschinen und Synchronmaschinen. Daneben
Klausur Elektrische Energiesysteme
 TU Berlin, Fak. IV, Institut für Energie-und Automatisierungstechnik Seite 1 von 15 Klausur Elektrische Energiesysteme 02.08.2012 Die Klausur besteht aus 4 Aufgaben. Pro richtig beantworteter Teilaufgabe
TU Berlin, Fak. IV, Institut für Energie-und Automatisierungstechnik Seite 1 von 15 Klausur Elektrische Energiesysteme 02.08.2012 Die Klausur besteht aus 4 Aufgaben. Pro richtig beantworteter Teilaufgabe
Ersatzschaltbild und Zeigerdiagramm
 8. Betriebsverhalten des Einphasentransformators Seite Ersatzschaltbild und Zeigerdiagramm Jeder Transformator besteht grundsätzlich aus zwei magnetisch gekoppelten Stromkreisen. Bild 8.-: Aufbau und Flusslinien
8. Betriebsverhalten des Einphasentransformators Seite Ersatzschaltbild und Zeigerdiagramm Jeder Transformator besteht grundsätzlich aus zwei magnetisch gekoppelten Stromkreisen. Bild 8.-: Aufbau und Flusslinien
Asychronmotor. ManlE- Komplementärfrage. dabei konstanst geblieben.: ges=3/2
 ManlE- Komplementärfrage Asychronmotor Erzeugung eines magnetischen Drehfeldes: Zwei Möglichkeiten: A: Drehung eines Elektro- oder Dauermagneten B: Durch zeitliche Überlagerung von Wechselfeldern mit räumlich
ManlE- Komplementärfrage Asychronmotor Erzeugung eines magnetischen Drehfeldes: Zwei Möglichkeiten: A: Drehung eines Elektro- oder Dauermagneten B: Durch zeitliche Überlagerung von Wechselfeldern mit räumlich
Elektrische Antriebe in der Kältetechnik
 Kapitel 8 Elektrische Antriebe in der Kältetechnik In diesem Kapitel sollen die elektromotorischen Antriebe, die im Kälteanlagenbau eine wichtige Stellung einnehmen, näher betrachtet werden. Einen wesentlichen
Kapitel 8 Elektrische Antriebe in der Kältetechnik In diesem Kapitel sollen die elektromotorischen Antriebe, die im Kälteanlagenbau eine wichtige Stellung einnehmen, näher betrachtet werden. Einen wesentlichen
Versuch EMM 4. Drehstrom-Synchronmaschine I. FH Stralsund Fachbereich Elektrotechnik Praktikum im Fach Elektrische Maschinen
 FH Stralsund Fachbereich Elektrotechnik Praktikum im Fach Elektrische Maschinen Versuch EMM 4 Drehstrom-Synchronmaschine I Versuchsziel: Aneignung von Kenntnisse über Wirkungsweise und Betriebsverhalten
FH Stralsund Fachbereich Elektrotechnik Praktikum im Fach Elektrische Maschinen Versuch EMM 4 Drehstrom-Synchronmaschine I Versuchsziel: Aneignung von Kenntnisse über Wirkungsweise und Betriebsverhalten
Inhaltsverzeichnis XIII. Vorwort zur 10. Auflage XVII. Vorwort zur 1. Auflage (1970)
") V Inhaltsverzeichnis Vorwort zur 10. Auflage XIII Vorwort zur 1. Auflage (1970) XVII 0 Einleitung 1 0.1 Schreibweise der Formelzeichen 1 0.2 Formelzeichen 2 0.3 Vorzeichenvereinbarungen 7 0.4 Formulierung
V Inhaltsverzeichnis Vorwort zur 10. Auflage XIII Vorwort zur 1. Auflage (1970) XVII 0 Einleitung 1 0.1 Schreibweise der Formelzeichen 1 0.2 Formelzeichen 2 0.3 Vorzeichenvereinbarungen 7 0.4 Formulierung
6 Die Synchronmaschine
 Universität Stuttgart Institut für Leistungselektronik und Elektrische Antriebe Prof. Dr.-Ing. J. Roth-Stielow 6.1.2 Prinzip 6 Die Synchronmaschine 6.1 Einführung Rotor 6.1.1 Anwendung und Einsatz Herausragende
Universität Stuttgart Institut für Leistungselektronik und Elektrische Antriebe Prof. Dr.-Ing. J. Roth-Stielow 6.1.2 Prinzip 6 Die Synchronmaschine 6.1 Einführung Rotor 6.1.1 Anwendung und Einsatz Herausragende
Erzeugung von drei Phasen verschobenen Wechselspannungen
 Erzeugung von drei Phasen verschobenen Wechselspannungen Werden in einem Generator nicht nur eine, sondern drei Spulen im Winkel von 120 versetzt angebracht, so bekommt man in jeder der drei Spulen einen
Erzeugung von drei Phasen verschobenen Wechselspannungen Werden in einem Generator nicht nur eine, sondern drei Spulen im Winkel von 120 versetzt angebracht, so bekommt man in jeder der drei Spulen einen
Klausur Elektrische Energiesysteme / Grundlagen der Elektrotechnik 3
 TU Berlin, Fak. IV, Institut für Energie-und Automatisierungstechnik Seite 1 von 9 Klausur Elektrische Energiesysteme / Grundlagen der Elektrotechnik 3 Die Klausur besteht aus 6 Aufgaben. Pro richtig beantworteter
TU Berlin, Fak. IV, Institut für Energie-und Automatisierungstechnik Seite 1 von 9 Klausur Elektrische Energiesysteme / Grundlagen der Elektrotechnik 3 Die Klausur besteht aus 6 Aufgaben. Pro richtig beantworteter
Fakultät ME Labor: Elektrische Antriebstechnik Versuch EA-3: Synchronmaschine
 Labor: MB/EK Elektrische Antriebe akultät ME Labor: Elektrische Antriebstechnik Versuch EA-3: ynchronmaschine Datum: emester: Gruppe: Protokoll: Testat: Bericht: Datum: 1. Einführung 1.1 Aufbau ynchron-
Labor: MB/EK Elektrische Antriebe akultät ME Labor: Elektrische Antriebstechnik Versuch EA-3: ynchronmaschine Datum: emester: Gruppe: Protokoll: Testat: Bericht: Datum: 1. Einführung 1.1 Aufbau ynchron-
Grundlagen elektrischer Maschinen
 Germar Müller, Bernd Ponick Grundlagen elektrischer Maschinen Neunte, völlig neu bearbeitete Auflage WILEY- VCH WILEY-VCH Verlag GmbH & Co. KGaA Inhaltsverzeichnis Vorwort zur 9. Auflage Vorwort zur 1.
Germar Müller, Bernd Ponick Grundlagen elektrischer Maschinen Neunte, völlig neu bearbeitete Auflage WILEY- VCH WILEY-VCH Verlag GmbH & Co. KGaA Inhaltsverzeichnis Vorwort zur 9. Auflage Vorwort zur 1.
Elektrische Maschinen und Antriebe
 Elektrische Maschinen und Antriebe Vorlesungsinhalt 1. Einleitung 2. Drehelder in elektrischen Maschinen 3. Mathematische Analyse von Lutspalteldern 4. Spannungsinduktion in Drehstrommaschinen 5. Die Schleiringläuer-Asynchronmaschine
Elektrische Maschinen und Antriebe Vorlesungsinhalt 1. Einleitung 2. Drehelder in elektrischen Maschinen 3. Mathematische Analyse von Lutspalteldern 4. Spannungsinduktion in Drehstrommaschinen 5. Die Schleiringläuer-Asynchronmaschine
Grundlagen elektrischer Maschinen
 Cermar Müller, Bernd Ponick Grundlagen elektrischer Maschinen Neunte, völlig neu bearbeitete Auflage WILEY- VCH WILEY-VCH Verlag GmbH & Co. KGaA XIII Inhaltsverzeichnis Vorwort zur 9. Auflage Vorwort zur
Cermar Müller, Bernd Ponick Grundlagen elektrischer Maschinen Neunte, völlig neu bearbeitete Auflage WILEY- VCH WILEY-VCH Verlag GmbH & Co. KGaA XIII Inhaltsverzeichnis Vorwort zur 9. Auflage Vorwort zur
Zusammenfassung elektrische Maschinen Gleichstrommaschine
 Gleichstrommaschine i F F F F U = R I + Ui U F = RF IF Gleichstrommaschine Induzierte Spannung: Ursache: Änderung des magnetischen Flusses in der Leiterschleife Ui = c φf Erzeugung des magnetischen Flusses:
Gleichstrommaschine i F F F F U = R I + Ui U F = RF IF Gleichstrommaschine Induzierte Spannung: Ursache: Änderung des magnetischen Flusses in der Leiterschleife Ui = c φf Erzeugung des magnetischen Flusses:
6. Synchronmaschine. EM1, Kovalev/Novender/Kern (Fachbereich IEM)
") 1 Prinzipielle Wirkungsweise Außenpolgenerator: Erregung außen; fest Spannungsinduktion innen; rotiert Energieübertragung mittels Schleifringe 2 Prinzipielle Wirkungsweise Außenpolmaschine: Erregung hier
1 Prinzipielle Wirkungsweise Außenpolgenerator: Erregung außen; fest Spannungsinduktion innen; rotiert Energieübertragung mittels Schleifringe 2 Prinzipielle Wirkungsweise Außenpolmaschine: Erregung hier
Elektrische Maschinen und Antriebe
 Elektrische Maschinen und Antriebe 2008 AGI-Information Management Consultants May be used for personal purporses only or by libraries associated to dandelon.com network. Aufbau - Wirkungsweise - Prüfung
Elektrische Maschinen und Antriebe 2008 AGI-Information Management Consultants May be used for personal purporses only or by libraries associated to dandelon.com network. Aufbau - Wirkungsweise - Prüfung
Bild 2-1: Prinzipieller Aufbau eines Synchrongenerators
 Inhaltsverzeichnis 2. Synchrongeneratoren... 2 2.1 Spannungsbildung im Drehstromgenerator... 2 2.2 Aufbau von Synchrongeneratoren... 8 2.3 Betriebsverhalten von Synchrongeneratoren... 11 2.3.1 Leerlaufkennlinie...
Inhaltsverzeichnis 2. Synchrongeneratoren... 2 2.1 Spannungsbildung im Drehstromgenerator... 2 2.2 Aufbau von Synchrongeneratoren... 8 2.3 Betriebsverhalten von Synchrongeneratoren... 11 2.3.1 Leerlaufkennlinie...
Raumzeiger. Lehrstuhl für Elektrische Antriebssysteme und Leistungselektronik. Arcisstraße 21 D München
 Lehrstuhl für Elektrische Antriebssysteme und Leistungselektronik Technische Universität München Arcisstraße 21 D 80333 München Email: eat@ei.tum.de Internet: http://www.eat.ei.tum.de Prof. Dr.-Ing. Ralph
Lehrstuhl für Elektrische Antriebssysteme und Leistungselektronik Technische Universität München Arcisstraße 21 D 80333 München Email: eat@ei.tum.de Internet: http://www.eat.ei.tum.de Prof. Dr.-Ing. Ralph
Leistungselektronik und Antriebstechnik Laborberichte. Christian Burri Tobias Plüss Pascal Schwarz
 Leistungselektronik und Antriebstechnik Laborberichte Christian Burri Tobias Plüss Pascal Schwarz 26. April 2013 Inhaltsverzeichnis 1 Asynchronmaschine am Netz 3 1.1 Versuchsaufbau......................................
Leistungselektronik und Antriebstechnik Laborberichte Christian Burri Tobias Plüss Pascal Schwarz 26. April 2013 Inhaltsverzeichnis 1 Asynchronmaschine am Netz 3 1.1 Versuchsaufbau......................................
Klausur Elektrische Energiesysteme / Grundlagen der Elektrotechnik 3
 TU Berlin, Fak. IV, Institut für Energie-und Automatisierungstechnik Seite 1 von 16 Klausur Elektrische Energiesysteme / Grundlagen der Elektrotechnik 3 Die Klausur besteht aus 4 Aufgaben. Pro richtig
TU Berlin, Fak. IV, Institut für Energie-und Automatisierungstechnik Seite 1 von 16 Klausur Elektrische Energiesysteme / Grundlagen der Elektrotechnik 3 Die Klausur besteht aus 4 Aufgaben. Pro richtig
A. Kremser. Grundzüge elektrischer Maschinen und Antriebe
 A. Kremser Grundzüge elektrischer Maschinen und Antriebe Grundzüge elektrischer Maschinen und Antriebe Von Prof. Dr.-Ing. Andreas Kremser Georg -Simon-Ohm-Fachhochschule Nürnberg Mit 111 Bildern m B. G.
A. Kremser Grundzüge elektrischer Maschinen und Antriebe Grundzüge elektrischer Maschinen und Antriebe Von Prof. Dr.-Ing. Andreas Kremser Georg -Simon-Ohm-Fachhochschule Nürnberg Mit 111 Bildern m B. G.
Fachpraktikum Hochdynamische Antriebssysteme. Theoretische Grundlagen Gleichstrommaschine
 Fachpraktikum Hochdynamische ntriebssysteme Gleichstrommaschine Christof Zwyssig Franz Zürcher Philipp Karutz HS 2008 Gleichstrommaschine Die hier aufgeführten theoretischen Betrachtungen dienen dem Grundverständnis
Fachpraktikum Hochdynamische ntriebssysteme Gleichstrommaschine Christof Zwyssig Franz Zürcher Philipp Karutz HS 2008 Gleichstrommaschine Die hier aufgeführten theoretischen Betrachtungen dienen dem Grundverständnis
Elektrische Maschinen und Antriebe
 Viewegs Fachbücher der Technik Elektrische Maschinen und Antriebe Lehr- und Arbeitsbuch Bearbeitet von Klaus Fuest, Peter Döring 1. Auflage 2004. Taschenbuch. X, 223 S. Paperback ISBN 978 3 528 54076 0
Viewegs Fachbücher der Technik Elektrische Maschinen und Antriebe Lehr- und Arbeitsbuch Bearbeitet von Klaus Fuest, Peter Döring 1. Auflage 2004. Taschenbuch. X, 223 S. Paperback ISBN 978 3 528 54076 0
Uebungsserie 4.2 Der Transformator
 15 September 017 Elektrizitätslehre 3 Martin Weisenhorn Uebungsserie 4 Der Transformator Aufgabe 1 Netzwerktransformation Ein idealer Übertrager mit dem Spannungsübersetzungsverhältnis = U 1 U ist sekundärseitig
15 September 017 Elektrizitätslehre 3 Martin Weisenhorn Uebungsserie 4 Der Transformator Aufgabe 1 Netzwerktransformation Ein idealer Übertrager mit dem Spannungsübersetzungsverhältnis = U 1 U ist sekundärseitig
5.1 SM: Aufbau und Ausführungsformen Seite 1
 5.1 SM: Aufbau und Ausführungsformen Seite 1 Aufbau Die Synchronmaschine besitzt im Ständer (Stator, Anker) im Allgemeinen eine verteilte Drehstromwicklung, die mit der Wicklung im Stator der Asynchronmaschine
5.1 SM: Aufbau und Ausführungsformen Seite 1 Aufbau Die Synchronmaschine besitzt im Ständer (Stator, Anker) im Allgemeinen eine verteilte Drehstromwicklung, die mit der Wicklung im Stator der Asynchronmaschine
Probeklausur im Sommersemester 2007
 Technische Universität Berlin 1 Elektrische Energiesysteme Probeklausur im Sommersemester 2007 Technische Universität Berlin 2 Aufgabe 1 In einem Drehstromnetz werden der in Dreieck geschaltete Generator
Technische Universität Berlin 1 Elektrische Energiesysteme Probeklausur im Sommersemester 2007 Technische Universität Berlin 2 Aufgabe 1 In einem Drehstromnetz werden der in Dreieck geschaltete Generator
Feldorientierte Regelung
 Dieter Gerling Audi-Forum elektrische Kleinantriebe im Fahrzeug Ingolstadt, 05.05.2014 Inhalt Grundlagen Feldorientierte Regelung am Beispiel Asynchronmaschine Feldorientierte Regelung am Beispiel Permanentmagnet-Maschine
Dieter Gerling Audi-Forum elektrische Kleinantriebe im Fahrzeug Ingolstadt, 05.05.2014 Inhalt Grundlagen Feldorientierte Regelung am Beispiel Asynchronmaschine Feldorientierte Regelung am Beispiel Permanentmagnet-Maschine
Elektrische Maschinen
 Rolf Fischer Elektrische Maschinen 16., aktualisierte Auflage Mit 448 Bildern, 74 Beispielen, 61 Aufgaben und Lösungen HANSER Inhaltsverzeichnis 1 Allgemeine Grundlagen elektrischer Maschinen 11 1.1 Prinzipien
Rolf Fischer Elektrische Maschinen 16., aktualisierte Auflage Mit 448 Bildern, 74 Beispielen, 61 Aufgaben und Lösungen HANSER Inhaltsverzeichnis 1 Allgemeine Grundlagen elektrischer Maschinen 11 1.1 Prinzipien
Theoretische Grundlagen
 Theoretische Grundlagen m eistungsbereich oberhalb 0,75 kw ("integral horsepower") sind etwa 7% der gefertigten elektrischen Maschinen Gleichstrommaschinen. Haupteinsatzgebiete sind Hüttenund Walzwerke,
Theoretische Grundlagen m eistungsbereich oberhalb 0,75 kw ("integral horsepower") sind etwa 7% der gefertigten elektrischen Maschinen Gleichstrommaschinen. Haupteinsatzgebiete sind Hüttenund Walzwerke,
Klausur Elektrische Energiesysteme / Grundlagen der Elektrotechnik 3
 TU Berlin, Fak. IV, Institut für Energie-und Automatisierungstechnik Seite 1 von 11 Klausur Elektrische Energiesysteme / Grundlagen der Elektrotechnik 3 Die Klausur besteht aus 4 Aufgaben. Pro richtig
TU Berlin, Fak. IV, Institut für Energie-und Automatisierungstechnik Seite 1 von 11 Klausur Elektrische Energiesysteme / Grundlagen der Elektrotechnik 3 Die Klausur besteht aus 4 Aufgaben. Pro richtig
Vorwort. 1 Einleitung 1. 2 Einteilung und Aufbau von Aktoren Einteilung der Aktoren Aufbau von Aktoren 8
 Vorwort V 1 Einleitung 1 2 Einteilung und Aufbau von Aktoren 5 2.1 Einteilung der Aktoren 5 2.2 Aufbau von Aktoren 8 3 Arbeit, Energie, Leistung 15 3.1 Elektrische Arbeit und Energie 15 3.2 Mechanische
Vorwort V 1 Einleitung 1 2 Einteilung und Aufbau von Aktoren 5 2.1 Einteilung der Aktoren 5 2.2 Aufbau von Aktoren 8 3 Arbeit, Energie, Leistung 15 3.1 Elektrische Arbeit und Energie 15 3.2 Mechanische
Inhaltsverzeichnis. Rolf Fischer. Elektrische Maschinen ISBN: Weitere Informationen oder Bestellungen unter
 Inhaltsverzeichnis Rolf Fischer Elektrische Maschinen ISBN: 978-3-446-42554-5 Weitere Informationen oder Bestellungen unter http://www.hanser.de/978-3-446-42554-5 sowie im Buchhandel. Carl Hanser Verlag,
Inhaltsverzeichnis Rolf Fischer Elektrische Maschinen ISBN: 978-3-446-42554-5 Weitere Informationen oder Bestellungen unter http://www.hanser.de/978-3-446-42554-5 sowie im Buchhandel. Carl Hanser Verlag,
Elektrische und Aktoren
 Elektrische und Aktoren Eine Einfuhrung von Prof. Wolfgang Gerke Oldenbourg Verlag 1 Einleitung 1 2 Einteilung und Aufbau von Aktoren 5 2.1 Einteilung der Aktoren 5 2.2 Aufbau von Aktoren 8 3 Arbeit, Energie,
Elektrische und Aktoren Eine Einfuhrung von Prof. Wolfgang Gerke Oldenbourg Verlag 1 Einleitung 1 2 Einteilung und Aufbau von Aktoren 5 2.1 Einteilung der Aktoren 5 2.2 Aufbau von Aktoren 8 3 Arbeit, Energie,
Klausur Elektrische Energiesysteme / Grundlagen der Elektrotechnik 3
 TU Berlin, Fak. IV, Institut für Energie- und Automatisierungstechnik Seite 1 von 12 Klausur Elektrische Energiesysteme / Grundlagen der Elektrotechnik 3 Die Klausur besteht aus 4 Aufgaben. Pro richtig
TU Berlin, Fak. IV, Institut für Energie- und Automatisierungstechnik Seite 1 von 12 Klausur Elektrische Energiesysteme / Grundlagen der Elektrotechnik 3 Die Klausur besteht aus 4 Aufgaben. Pro richtig
Elektrische Maschinen
 Elektrische Maschinen von Rolf Fischer 2008 AGI-Information Management Consultants May be used for personal purporses only or by libraries associated to dandelon.com network. Mit 462 Bildern 10. überarbeitete
Elektrische Maschinen von Rolf Fischer 2008 AGI-Information Management Consultants May be used for personal purporses only or by libraries associated to dandelon.com network. Mit 462 Bildern 10. überarbeitete
Klausur Elektrische Energiesysteme / Grundlagen der Elektrotechnik 3
 TU Berlin, Fak. IV, Institut für Energie-und Automatisierungstechnik Seite 1 von 18 Klausur Elektrische Energiesysteme / Grundlagen der Elektrotechnik 3 Die Klausur besteht aus 4 Aufgaben. Pro richtig
TU Berlin, Fak. IV, Institut für Energie-und Automatisierungstechnik Seite 1 von 18 Klausur Elektrische Energiesysteme / Grundlagen der Elektrotechnik 3 Die Klausur besteht aus 4 Aufgaben. Pro richtig
Drehstrom-Asynchronmotor. Name Vorname Matr.-Nr. Teilnahmetestat. Name Vorname Matr.-Nr. Teilnahmetestat. Name Vorname Matr.-Nr.
 Beuth Hochschule für Technik Berlin Fachbereich VI - Informatik und edien Labor für Automatisierungstechnik, B54 SoSe 211 Elektrische Systeme Labor (ESÜ29) Studiengang Technische Informatik Drehstrom-Asynchronmotor
Beuth Hochschule für Technik Berlin Fachbereich VI - Informatik und edien Labor für Automatisierungstechnik, B54 SoSe 211 Elektrische Systeme Labor (ESÜ29) Studiengang Technische Informatik Drehstrom-Asynchronmotor
Spannungen, Ströme und Zeigerdiagramme
 5.5 SM: Stationärer Betrieb Seite 1 Spannungen, Ströme un Zeigeriagramme Unter er Bezeichnung stationärer Betrieb er Synchronmaschine wir er Betrieb mit synchroner Drehzahl am starren symmetrischem Netz
5.5 SM: Stationärer Betrieb Seite 1 Spannungen, Ströme un Zeigeriagramme Unter er Bezeichnung stationärer Betrieb er Synchronmaschine wir er Betrieb mit synchroner Drehzahl am starren symmetrischem Netz
Elektrotechnik 3. Drehstrom Industrielle Stromversorgung Elektrische Maschinen / Antriebe. Studium Plus // WI-ET. SS 2016 Prof. Dr.
 Elektrotechnik 3 Drehstrom Industrielle Stromversorgung Elektrische Maschinen / Antriebe Studium Plus // WI-ET SS 06 Prof. Dr. Sergej Kovalev Drehstromsystems Themen: Einführung Zeitverläufe Mathematische
Elektrotechnik 3 Drehstrom Industrielle Stromversorgung Elektrische Maschinen / Antriebe Studium Plus // WI-ET SS 06 Prof. Dr. Sergej Kovalev Drehstromsystems Themen: Einführung Zeitverläufe Mathematische
Informations- und Elektrotechnik Semester: Fachbereich 3 : Elektrische Maschinen Prof. Dr. Bernd Aschendorf Datum: Versuch Nr. 4 Thema: Fach: Dozent:
 Fachbereich 3 : Informations- und Elektrotechnik Semester: Fach: Dozent: Elektrische Maschinen Prof. Dr. Bernd Aschendorf Datum: Versuch Nr. 4 Thema: Einführung in Elektrische Maschinen - Drehfeldmaschine
Fachbereich 3 : Informations- und Elektrotechnik Semester: Fach: Dozent: Elektrische Maschinen Prof. Dr. Bernd Aschendorf Datum: Versuch Nr. 4 Thema: Einführung in Elektrische Maschinen - Drehfeldmaschine
Kälteanlagentechnik. Elektro- und Steuerungstechnik. Bearbeitet von Dietmar Schittenhelm
 Kälteanlagentechnik Elektro- und Steuerungstechnik Bearbeitet von Dietmar Schittenhelm 6., überarbeitete Auflage 2015. Buch. XIV, 320 S. Kartoniert ISBN 978 3 8007 3650 8 Format (B x L): 17 x 24 cm Gewicht:
Kälteanlagentechnik Elektro- und Steuerungstechnik Bearbeitet von Dietmar Schittenhelm 6., überarbeitete Auflage 2015. Buch. XIV, 320 S. Kartoniert ISBN 978 3 8007 3650 8 Format (B x L): 17 x 24 cm Gewicht:
Elektrotechnik Formelsammlung. Ersatzschaltbilder und Zeigerdiagramme des einphasigen Transformators. jx h. R Fe
 1) Vollständiges T-Ersatzschaltbild, Grundformeln jx σ R jx σ1 jx h Primärspannung Wicklungswiderstand primär Sekundärspannung R Wicklungswiderstand sekundär Quellenspannung X h Hauptinduktivität Eisenverlustwiderstand
1) Vollständiges T-Ersatzschaltbild, Grundformeln jx σ R jx σ1 jx h Primärspannung Wicklungswiderstand primär Sekundärspannung R Wicklungswiderstand sekundär Quellenspannung X h Hauptinduktivität Eisenverlustwiderstand
Berechnen einer Kommutatormaschine mit FEMAG
 Berechnen einer Kommutatormaschine mit FEMAG FEMAG biete verschiedene Möglichkeiten um eine Kommutatormaschine zu berechnen. Mit Commutatormotor Simulation (Script: run_models('com-motor_sim')) kann das
Berechnen einer Kommutatormaschine mit FEMAG FEMAG biete verschiedene Möglichkeiten um eine Kommutatormaschine zu berechnen. Mit Commutatormotor Simulation (Script: run_models('com-motor_sim')) kann das
Dreiphasenwechselstrom - Drehstrom
 Universität tuttgart Institut für eistungselektronik und Elektrische Antriebe Abt. Elektrische Energiewandlung Prof. Dr.-Ing. N. Parspour Dreiphasenwechselstrom - Drehstrom Als Dreiphasenwechselstrom oder
Universität tuttgart Institut für eistungselektronik und Elektrische Antriebe Abt. Elektrische Energiewandlung Prof. Dr.-Ing. N. Parspour Dreiphasenwechselstrom - Drehstrom Als Dreiphasenwechselstrom oder
Grundlagen der Elektrotechnik: Wechselstromwiderstand Xc Seite 1 R =
 Grundlagen der Elektrotechnik: Wechselstromwiderstand Xc Seite 1 Versuch zur Ermittlung der Formel für X C In der Erklärung des Ohmschen Gesetzes ergab sich die Formel: R = Durch die Versuche mit einem
Grundlagen der Elektrotechnik: Wechselstromwiderstand Xc Seite 1 Versuch zur Ermittlung der Formel für X C In der Erklärung des Ohmschen Gesetzes ergab sich die Formel: R = Durch die Versuche mit einem
INSTITUT FÜR ELEKTROTECHNIK DEPARTMENT OF ELECTRICAL ENGINEERING
 INSTITUT FÜ ELEKTOTECHNIK DEPATMENT OF ELECTICAL ENGINEEING MONTANUNIVESITÄT LEOBEN UNIVESITY OF LEOBEN, AUSTIA Franz-Josef-Straße 18 A-8700 Leoben Österreich, Austria Tel.:+43/(0)3842/402/310 Fax: +43/(0)3842/402/318
INSTITUT FÜ ELEKTOTECHNIK DEPATMENT OF ELECTICAL ENGINEEING MONTANUNIVESITÄT LEOBEN UNIVESITY OF LEOBEN, AUSTIA Franz-Josef-Straße 18 A-8700 Leoben Österreich, Austria Tel.:+43/(0)3842/402/310 Fax: +43/(0)3842/402/318
Diplomvorprüfung WS 2009/10 Grundlagen der Elektrotechnik Dauer: 90 Minuten
 Diplomvorprüfung Grundlagen der Elektrotechnik Seite 1 von 8 Hochschule München Fakultät 03 Zugelassene Hilfsmittel: Taschenrechner, zwei Blatt DIN A4 eigene Aufzeichnungen Diplomvorprüfung WS 2009/10
Diplomvorprüfung Grundlagen der Elektrotechnik Seite 1 von 8 Hochschule München Fakultät 03 Zugelassene Hilfsmittel: Taschenrechner, zwei Blatt DIN A4 eigene Aufzeichnungen Diplomvorprüfung WS 2009/10
Asynchronmaschine: Heylandkreis für
 Aufgabe 1: Asynchronmaschine: Heylandkreis für R 1 =0Ω Ausgangspunkt für die Konstruktion des Heylandkreises in Aufgabe 1.1 bildet der Nennstrom mit seiner Phasenlage. Abbildung 1: Nennstrom Da der Leistungsfaktor
Aufgabe 1: Asynchronmaschine: Heylandkreis für R 1 =0Ω Ausgangspunkt für die Konstruktion des Heylandkreises in Aufgabe 1.1 bildet der Nennstrom mit seiner Phasenlage. Abbildung 1: Nennstrom Da der Leistungsfaktor
Finite Elemente Analyse eines 500 MVA Wasserkraft-Synchrongenerators
 Finite Elemente Analyse eines MVA Wasserkraft-Synchrongenerators Christian Grabner, Erich Schmidt Institut für Elektrische Antriebe und Maschinen, Technische Universität Wien A 4 Wien, Gußhausstraße 2
Finite Elemente Analyse eines MVA Wasserkraft-Synchrongenerators Christian Grabner, Erich Schmidt Institut für Elektrische Antriebe und Maschinen, Technische Universität Wien A 4 Wien, Gußhausstraße 2
Klaus Fuest. Elektrische Maschinen und Antriebe
 Klaus Fuest Elektrische Maschinen und Antriebe Klaus Fuest Elektrische Maschinen und Antriebe Lehr- und Arbeitsbuch Mit 151 Bildern, zahlreichen durchgerechneten Beispielen und Übungen sowie Fragen und
Klaus Fuest Elektrische Maschinen und Antriebe Klaus Fuest Elektrische Maschinen und Antriebe Lehr- und Arbeitsbuch Mit 151 Bildern, zahlreichen durchgerechneten Beispielen und Übungen sowie Fragen und
Klausur Elektrische Energiesysteme
 TU Berlin, Fak. IV, Institut für Energie-und Automatisierungstechnik Seite 1 von 17 Klausur Elektrische Energiesysteme Die Klausur besteht aus 4 Aufgaben. Pro richtig beantworteter Teilaufgabe a), b),
TU Berlin, Fak. IV, Institut für Energie-und Automatisierungstechnik Seite 1 von 17 Klausur Elektrische Energiesysteme Die Klausur besteht aus 4 Aufgaben. Pro richtig beantworteter Teilaufgabe a), b),
4. Asynchronmaschine. Elektrische Energietechnik (S8803) Seite 4.1 Asynchronmaschine. 4.1 Allgemeines
 Seite 4.1 Asynchronmaschine. 4.1 Allgemeines") Elektrische Energietechnik (S8803) Seite 4.1 4. 4.1 Allgemeines Die ist die am häufigsten eingesetzte elektrische Maschine (80 % aller Maschinen über 1 kw), weil sie kostengünstig gefertigt werden kann
Elektrische Energietechnik (S8803) Seite 4.1 4. 4.1 Allgemeines Die ist die am häufigsten eingesetzte elektrische Maschine (80 % aller Maschinen über 1 kw), weil sie kostengünstig gefertigt werden kann
Fachpraktikum Hochdynamische Antriebssysteme. Theoretische Grundlagen
 Fachpraktikum Hochdynamische Antriebssysteme Christof Zwyssig Franz Zürcher Philipp Karutz HS 2008 Permanentmagneterregte Synchronmaschine Die hier aufgeführten theoretischen Betrachtungen dienen dem Grundverständnis
Fachpraktikum Hochdynamische Antriebssysteme Christof Zwyssig Franz Zürcher Philipp Karutz HS 2008 Permanentmagneterregte Synchronmaschine Die hier aufgeführten theoretischen Betrachtungen dienen dem Grundverständnis
Aufgaben zur Asynchronmaschine
 Blatt 1 Aufgaben zur Asynchronmaschine 1. Aufgabe Grundlagen Gegeben ist eine Asynchronmaschine (ASM) mit Kurzschlußläufer. Daten: U 1 = 566 V Statornennspannung F 1 = 60 Hz Statornennfrequenz = 2 Polpaarzahl
Blatt 1 Aufgaben zur Asynchronmaschine 1. Aufgabe Grundlagen Gegeben ist eine Asynchronmaschine (ASM) mit Kurzschlußläufer. Daten: U 1 = 566 V Statornennspannung F 1 = 60 Hz Statornennfrequenz = 2 Polpaarzahl
Umwelttechnik Walter Thurner Dipl. Ing. (FH)
") Umwelttechnik Walter Thurner Dipl. Ing. (FH) Dreyerstraße 9 D 80689 München Tel. 089/54643553 Fax 54643552 Technische Beschreibung: Elektrische Unipolarmaschine Die Entwicklung bezieht sich auf eine elektrische
Umwelttechnik Walter Thurner Dipl. Ing. (FH) Dreyerstraße 9 D 80689 München Tel. 089/54643553 Fax 54643552 Technische Beschreibung: Elektrische Unipolarmaschine Die Entwicklung bezieht sich auf eine elektrische
Grundlagen elektrischer Maschinen
 Germar Müller Grundlagen elektrischer Maschinen Weinheim New York Basel Cambridge Tokyo Inhaltsverzeichnis 0. Einleitung 1 0.1. Schreibweise der Formelzeichen 1 0.2. Vorzeichenvereinbarungen 2 0.3. Formulierung
Germar Müller Grundlagen elektrischer Maschinen Weinheim New York Basel Cambridge Tokyo Inhaltsverzeichnis 0. Einleitung 1 0.1. Schreibweise der Formelzeichen 1 0.2. Vorzeichenvereinbarungen 2 0.3. Formulierung
ENP4 Synchronmaschine 03/2010
 Hochschule für ngewandte issenschaften Hamburg Labor für elektrische ntriebe Studiengruppe: Eingegangen am: Protokollführer: Übungstag: eitere Teilnehmer: Professor: EP4 03/2010 1 Einleitung Drehstromsynchronmaschinen
Hochschule für ngewandte issenschaften Hamburg Labor für elektrische ntriebe Studiengruppe: Eingegangen am: Protokollführer: Übungstag: eitere Teilnehmer: Professor: EP4 03/2010 1 Einleitung Drehstromsynchronmaschinen
Schnittbild einer zweipoligen elektrisch erregten Gleichstrommaschine. Rotor der Gleichstrommaschine und eine Windung des Rotors
 Universität Stuttgart Institut für Leistungselektronik und Elektrische Antriebe Abt. Elektrische Energiewandlung Prof. Dr.-Ing. N. Parspour Inhalt 5 Elektrische Maschinen... 1 5.1 Gleichstrommaschinen...
Universität Stuttgart Institut für Leistungselektronik und Elektrische Antriebe Abt. Elektrische Energiewandlung Prof. Dr.-Ing. N. Parspour Inhalt 5 Elektrische Maschinen... 1 5.1 Gleichstrommaschinen...
Energietechnisches Praktikum I
 INSTITUT FÜR ELEKTRISCHE MASCHINEN RHEINISCH-WESTFÄLISCHE TECHNISCHE HOCHSCHULE AACHEN Energietechnisches Praktikum I ersuch 1: Synchronmaschine als Motor und Generator 1 Zweck des ersuchs 1 2 ersuchsvorbereitung
INSTITUT FÜR ELEKTRISCHE MASCHINEN RHEINISCH-WESTFÄLISCHE TECHNISCHE HOCHSCHULE AACHEN Energietechnisches Praktikum I ersuch 1: Synchronmaschine als Motor und Generator 1 Zweck des ersuchs 1 2 ersuchsvorbereitung
Fachpraktikum Elektrische Maschinen Versuch 1: Gleichstrommaschine
 Fachpraktikum Elektrische Maschinen Versuch 1: Gleichstrommaschine Theorie Inhaltsverzeichnis Inhaltsverzeichnis... 2 1 Grundprinzip... 3 1.1 Kanalisierung des Magnetfeldes durch Polschuhe... 4 1.2 Kommutator...
Fachpraktikum Elektrische Maschinen Versuch 1: Gleichstrommaschine Theorie Inhaltsverzeichnis Inhaltsverzeichnis... 2 1 Grundprinzip... 3 1.1 Kanalisierung des Magnetfeldes durch Polschuhe... 4 1.2 Kommutator...
6.4. Drehstrom-Synchronmaschine (DSM)
") PD Dr.-Ing. habil. W. Michalik 6.4. Drehstrom-ynchronmaschine (DM) 6.4.1. Geschichtliche Entwicklung der ynchronmaschine Mitte des vorigen Jh.: Einphasige M, als Einphasengeneratoren zur Versorgung von
PD Dr.-Ing. habil. W. Michalik 6.4. Drehstrom-ynchronmaschine (DM) 6.4.1. Geschichtliche Entwicklung der ynchronmaschine Mitte des vorigen Jh.: Einphasige M, als Einphasengeneratoren zur Versorgung von
Die Asynchronmaschine. Theorie Teil 2
 Die Asynchronmaschine Theorie Teil Inhaltsverzeichnis Inhaltsverzeichnis 1 Ortskurve des Ständerstromes...3 1.1 Ossanna-Kreis der Ströme...4 1. Ossanna-Kreis der Leistungen...5 1.3 Messtechnische Erfassung
Die Asynchronmaschine Theorie Teil Inhaltsverzeichnis Inhaltsverzeichnis 1 Ortskurve des Ständerstromes...3 1.1 Ossanna-Kreis der Ströme...4 1. Ossanna-Kreis der Leistungen...5 1.3 Messtechnische Erfassung
Friedrich-Alexander Universität Erlangen-Nürnberg Klausur in Grundlagen der Elektrotechnik für Maschinenbauer 19. September 2005
 Lehrstuhl für Elektromagnetische Felder Prof Dr-Ing T Dürbaum Friedrich-Alexander niversität Erlangen-Nürnberg Klausur in Grundlagen der Elektrotechnik für Maschinenbauer 9 September 2005 Bearbeitungszeit:
Lehrstuhl für Elektromagnetische Felder Prof Dr-Ing T Dürbaum Friedrich-Alexander niversität Erlangen-Nürnberg Klausur in Grundlagen der Elektrotechnik für Maschinenbauer 9 September 2005 Bearbeitungszeit:
Elektrische Maschinen und Antriebe
 Elektrische Maschinen und Antriebe Vorlesungsinhalt 1. Einleitung 2. Drehfelder in elektrischen Maschinen 3. Mathematische Analyse von Luftspaltfeldern 4. Spannungsinduktion in Drehstrommaschinen 5. Die
Elektrische Maschinen und Antriebe Vorlesungsinhalt 1. Einleitung 2. Drehfelder in elektrischen Maschinen 3. Mathematische Analyse von Luftspaltfeldern 4. Spannungsinduktion in Drehstrommaschinen 5. Die
3. Grundlagen des Drehstromsystems
 Themen: Einführung Zeitverläufe Mathematische Beschreibung Drehstromschaltkreise Anwendungen Symmetrische und unsymmetrische Belastung Einführung Drehstrom - Dreiphasenwechselstrom: Wechselstrom und Drehstrom
Themen: Einführung Zeitverläufe Mathematische Beschreibung Drehstromschaltkreise Anwendungen Symmetrische und unsymmetrische Belastung Einführung Drehstrom - Dreiphasenwechselstrom: Wechselstrom und Drehstrom
Elektrische Maschinen und Antriebe
 Elektrische Maschinen und Antriebe Vorlesungsinhalt 1. Einleitung 2. Drehelder in elektrischen Maschinen 3. Mathematische Analyse von Lutspalteldern 4. Spannungsinduktion in Drehstrommaschinen 5. Die Schleiringläuer-Asynchronmaschine
Elektrische Maschinen und Antriebe Vorlesungsinhalt 1. Einleitung 2. Drehelder in elektrischen Maschinen 3. Mathematische Analyse von Lutspalteldern 4. Spannungsinduktion in Drehstrommaschinen 5. Die Schleiringläuer-Asynchronmaschine
2 Grundlagen. 2.2 Gegenüberstellung Induktivität und Kapazität. 2.1 Gegenüberstellung der Grössen Translation > Rotation
 1 Inhaltsverzeichnis 1 Inhaltsverzeichnis... 1 2 Grundlagen... 3 2.1 Gegenüberstellung der Grössen Translation > Rotation... 3 2.2 Gegenüberstellung Induktivität und Kapazität... 4 2.3 Zentrifugalkraft...
1 Inhaltsverzeichnis 1 Inhaltsverzeichnis... 1 2 Grundlagen... 3 2.1 Gegenüberstellung der Grössen Translation > Rotation... 3 2.2 Gegenüberstellung Induktivität und Kapazität... 4 2.3 Zentrifugalkraft...
Induktion. Bewegte Leiter
 Induktion Bewegte Leiter durch die Kraft werden Ladungsträger bewegt auf bewegte Ladungsträger wirkt im Magnetfeld eine Kraft = Lorentzkraft Verschiebung der Ladungsträger ruft elektrisches Feld hervor
Induktion Bewegte Leiter durch die Kraft werden Ladungsträger bewegt auf bewegte Ladungsträger wirkt im Magnetfeld eine Kraft = Lorentzkraft Verschiebung der Ladungsträger ruft elektrisches Feld hervor
Übung Grundlagen der Elektrotechnik B
 Übung Grundlagen der Elektrotechnik B Aufgabe 1: Rotierende Leiterschleife Betrachtet wird die im folgenden Bild dargestellte, in einem homogenen Magnetfeld rotierende Leiterschleife. Es seien folgende
Übung Grundlagen der Elektrotechnik B Aufgabe 1: Rotierende Leiterschleife Betrachtet wird die im folgenden Bild dargestellte, in einem homogenen Magnetfeld rotierende Leiterschleife. Es seien folgende
Inhalt. Institut für Leistungselektronik und Elektrische Antriebe. Universität Stuttgart
 Universität Stuttgart Institut für Leistungselektronik und Elektrische Antriebe Abt. Elektrische Energiewandlung Prof. Dr.-Ing. N. Parspour Inhalt 5 Elektrische Maschinen... 25 5.2 Asynchronmaschinen...
Universität Stuttgart Institut für Leistungselektronik und Elektrische Antriebe Abt. Elektrische Energiewandlung Prof. Dr.-Ing. N. Parspour Inhalt 5 Elektrische Maschinen... 25 5.2 Asynchronmaschinen...
Bestimmende die fehlenden Angaben bei der Induktion! + +
 Bestimmende die fehlenden Angaben bei der Induktion! + + N S Bewegung Bewegung S N Polarität? + N keine Induktionsspannung Bewegungsrichtung? N Bewegung S S Bewegung Magnetpole? Polarität? Induktion durch
Bestimmende die fehlenden Angaben bei der Induktion! + + N S Bewegung Bewegung S N Polarität? + N keine Induktionsspannung Bewegungsrichtung? N Bewegung S S Bewegung Magnetpole? Polarität? Induktion durch
2. Wicklungen für Drehfelder in elektrischen Maschinen 27 Aufgabe A2.1: Felderregerkurve einer Drehstrom-Ganzlochwicklung
 VIII 1. Grundlagen elektromechanischer Energiewandler 1 Aufgabe AI. 1: Magnetischer Eisenkreis 1 Aufgabe AI.2: Ruhinduktion 4 Aufgabe AI.3: Bewegungsinduktion 5 Aufgabe AI.4: Bewegter stromdurchflossener
VIII 1. Grundlagen elektromechanischer Energiewandler 1 Aufgabe AI. 1: Magnetischer Eisenkreis 1 Aufgabe AI.2: Ruhinduktion 4 Aufgabe AI.3: Bewegungsinduktion 5 Aufgabe AI.4: Bewegter stromdurchflossener
Entwicklung eines rekonfigurierbaren Batteriemoduls
 Entwicklung eines rekonfigurierbaren Batteriemoduls Fakultät für Elektrotechnik und Informationstechnik Technische Universität München Christian Hanzl Januar 2016 Sperrvermerk Hier steh der Sperrvermerk.
Entwicklung eines rekonfigurierbaren Batteriemoduls Fakultät für Elektrotechnik und Informationstechnik Technische Universität München Christian Hanzl Januar 2016 Sperrvermerk Hier steh der Sperrvermerk.
Erzeugung eines Kreisdrehfeldes
 3.1 Aufbau von symmetrischen dreisträngigen Drehfeldwicklungen Seite 1 Erzeugung eines Kreisdrehfeldes Kreisdrehfeld: Ein mit konstanter Amlitude im Luftsalt räumlich umlaufendes magnetisches Feld. Damit
3.1 Aufbau von symmetrischen dreisträngigen Drehfeldwicklungen Seite 1 Erzeugung eines Kreisdrehfeldes Kreisdrehfeld: Ein mit konstanter Amlitude im Luftsalt räumlich umlaufendes magnetisches Feld. Damit
Einführung in Elektrische Maschinen - Synchronmaschine
 Fachbereich 3 : Informations- und Elektrotechnik Semester: Fach: Dozent: Elektrische Maschinen Prof. Dr. Bernd Aschendorf Datum: Versuch Nr. 5 Thema: Einführung in Elektrische Maschinen - Synchronmaschine
Fachbereich 3 : Informations- und Elektrotechnik Semester: Fach: Dozent: Elektrische Maschinen Prof. Dr. Bernd Aschendorf Datum: Versuch Nr. 5 Thema: Einführung in Elektrische Maschinen - Synchronmaschine
Klausur Elektrische Energiesysteme / Grundlagen der Elektrotechnik 3
 TU Berlin, Fak. IV, Institut für Energie-und Automatisierungstechnik Seite 1 von 11 Klausur Elektrische Energiesysteme / Grundlagen der Elektrotechnik 3 Die Klausur besteht aus 5 Aufgaben. Pro richtig
TU Berlin, Fak. IV, Institut für Energie-und Automatisierungstechnik Seite 1 von 11 Klausur Elektrische Energiesysteme / Grundlagen der Elektrotechnik 3 Die Klausur besteht aus 5 Aufgaben. Pro richtig
3.7 Gesetz von Biot-Savart und Ampèresches Gesetz [P]
![3.7 Gesetz von Biot-Savart und Ampèresches Gesetz [P]](/thumbs/56/38171884.jpg "3.7 Gesetz von Biot-Savart und Ampèresches Gesetz [P]") 3.7 Gesetz von Biot-Savart und Ampèresches Gesetz [P] B = µ 0 I 4 π ds (r r ) r r 3 a) Beschreiben Sie die im Gesetz von Biot-Savart vorkommenden Größen (rechts vom Integral). b) Zeigen Sie, dass das Biot-Savartsche
3.7 Gesetz von Biot-Savart und Ampèresches Gesetz [P] B = µ 0 I 4 π ds (r r ) r r 3 a) Beschreiben Sie die im Gesetz von Biot-Savart vorkommenden Größen (rechts vom Integral). b) Zeigen Sie, dass das Biot-Savartsche
TR Transformator. Blockpraktikum Herbst Moritz Stoll, Marcel Schmittfull (Gruppe 2b) 25. Oktober 2007
 25. Oktober 2007") TR Transformator Blockpraktikum Herbst 2007 (Gruppe 2b) 25 Oktober 2007 Inhaltsverzeichnis 1 Grundlagen 2 11 Unbelasteter Transformator 2 12 Belasteter Transformator 3 13 Leistungsanpassung 3 14 Verluste
TR Transformator Blockpraktikum Herbst 2007 (Gruppe 2b) 25 Oktober 2007 Inhaltsverzeichnis 1 Grundlagen 2 11 Unbelasteter Transformator 2 12 Belasteter Transformator 3 13 Leistungsanpassung 3 14 Verluste