Optimierung. Optimierung. Vorlesung 2 Optimierung ohne Nebenbedingungen Gradientenverfahren Thomas Brox, Fabian Kuhn
|
|
|
- Joachim Walter
- vor 7 Jahren
- Abrufe
Transkript
1 Optimierung Vorlesung 2 Optimierung ohne Nebenbedingungen Gradientenverfahren 1

2 Minimierung ohne Nebenbedingung Ein Optimierungsproblem besteht aus einer zulässigen Menge und einer Zielfunktion Minimum Beispiel: Minimum: Minimierer: Die nächsten Vorlesungen: Kontinuierliche Variablen (beliebiger Dimensionalität) Keine Nebenbedingungen 2
 Keine")
3 Lokale und globale Minima Globales Minimum Lokales Minimum Für ein lokales Minimum muss gelten Dabei ist eine Normkugel mit einem hinreichend kleinen Radius : Für ein globales Minimum muss gelten 3

4 Im allgemeinen kann es mehrere globale Minima geben Eindeutiges globales Optimum Zusammenhängende Region globaler Optima Mehrere globale Optima Kann man feststellen, ob eine Optimierungsaufgabe gutmütig ist, also ein eindeutiges globales Minimum und keine weiteren lokalen Minima hat? 4

5 Konvexität, konvexe Mengen konvex konvex nicht konvex nicht konvex Eine Menge ist konvex, wenn für beliebige Punkte auch die Verbindungslinie in enthalten ist: 5

6 Konvexe Funktionen konvex nicht konvex nicht konvex Eine über einer konvexen Menge erklärte Funktion heißt konvex, falls Sie heißt streng konvex, falls Eine Funktion heisst (streng) konkav, falls (streng) konvex ist 6
 konkav, falls (streng) konvex")
7 Konvexität und globale Minima Eine streng konvexe Funktion besitzt ein eindeutiges globales Minimum und keine lokalen Minima. Eine konvexe Funktion kann mehrere globale Minima besitzen, jedoch keine zusätzlichen lokalen Minima. Eine nicht-konvexe Funktion, die keine lokalen Minima besitzt, wird als quasikonvex bezeichnet. streng konvex konvex quasikonvex nicht konvex 7

8 Minimierung ohne Nebenbedingungen Gegeben: Funktion : Ziel: Berechne min und arg min Beispiel: Eindimensionale (differenzierbare) Funktion : Notwendige Bedingung für lokales Minimum (oder Maximum): 0 Hinreichende Bedingung für lokales Minimum: 0 Funktion is konvex falls 0 für alle Funktion ist strikt konvex falls 0 für alle konvex: lokales Minimum ist globales Minimum strikt konvex: eindeutiges lokales Minimum 8

9 Mehrdimensionale Differenzierbare Funktionen Gegeben: Funktion : Gradient am Punkt : 9

10 Mehrdimensionale Differenzierbare Funktionen Notwendige Bedingung für lokales Minimum (Max.) an Punkt : Gradient 0 Hinreichende Bedingung für lokales Minimum: Hesse sche Matrix pos. definit postitiv definit: 0 für alle Konvexe Funktionen konvex: lokales Min. = globales Min., strikt konvex: eindeutiges lokales Min. konvex : pos. semidefinit für alle strikt konvex: positiv definit für alle 10

11 Differenzierbare Funktionen Nachfolgend gehen wir davon aus, dass die Funktion mindestens einmal differenzierbar ist: Gradient von : Notwendige Bedingung für ein Minimum von : Ist konvex, so ist dies auch eine hinreichende Bedingung. Und auch sonst ist es oft das primäre Ziel. Allgemein stellt die Bedingung ein nichtlineares Gleichungssystem dar, das numerisch gelöst werden muss. 11

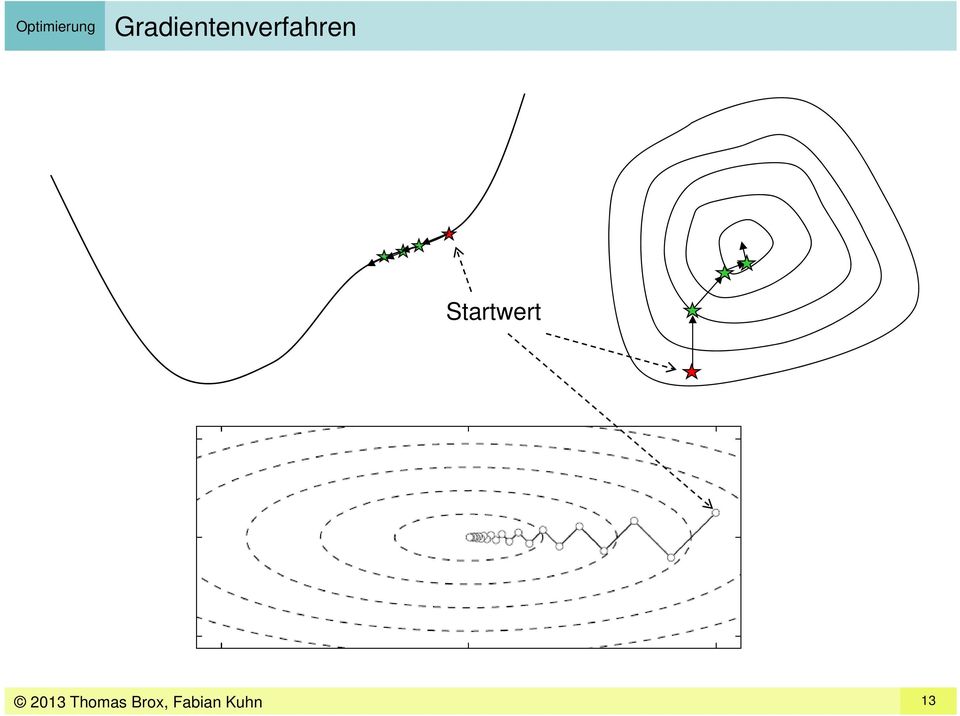
12 Gradientenverfahren Iterative Abstiegsverfahren: mit einem Startpunkt, einer Änderungsrichtung und einer Schrittweite Beim Gradientenverfahren entspricht die Änderungsrichtung dem negativen Gradienten der Zielfunktion an der aktuellen Stelle Ideal: Bestimme optimale Schrittweite, so dass, 0 Mehr zur Schrittweitenbestimmung später 12

13 Gradientenverfahren Startwert 13
14 Schrittweitenbestimmung Die Wahl der Schrittweite ist entscheidend für Konvergenz und Effizienz des Verfahrens Bei zu großen Schrittweiten kann die Lösung in einem Iterationsschritt schlechter werden (keine Konvergenz) Bei kleinen Schrittweiten benötigt das Verfahren viele Iterationen zur Lösung hoher Rechenaufwand Richtung bereits durch vorgegeben eindimensionales Optimierungsproblem über Line search In einigen Fällen ist eine feste Schrittweite, die Konvergenz garantiert, effizienter als die Bestimmung einer optimalen Schrittweite. 14

15 Line search eindimensionale Optimierung Optimierungsaufgabe mit einer eindimensionalen Funktion Falls differenzierbar ist, ergibt sich die notwendige Bedingung Normalerweise nichtlinear und dann nur mit großem Aufwand exakt lösbar Daher numerische Lösungsverfahren in einem geschlossenen Intervall unter Einhaltung von Qualitätsbedingungen Armijo-Bedingung:, 0,1 Stellt sicher, dass die Zielfunktion durch die Schrittweite hinreichend reduziert wird. Überlicherweise 10 15

16 Backtracking line search Ziel: Approximative Minimierung von, 0,1 1 Starte mit 1und reduziere, 0,1 solange bis wieder steigt und die Armijo-Bedingung erfüllt ist. Für quasi-konvexe Funktionen ist die Armijo Bedingung immer erfüllt sobald wieder steigt. 16

17 Rekursive Suche Ziel: Minimierung von, 0, Annahme: ist streng quasi-konvex (eindeutiges Minimum) 0 u v b Grundlegende Idee: Reduziere in jedem Schritt 1,,das Unsicherheitsintervall, 0,. Falls, Falls, 17

18 Rekursive Suche Einfache Variante: 1 3, 2 3 Suchbereich wird in jedem Schritt um Faktor verkleinert Pro Schritt müssen 2 neue Fkt.-werte (bei und ) berechnet werden Verbesserung: Können wir und so wählen, dass einer der Werte als neue Grenze weiterverwendet werden kann? 18

19 Golden Ratio Search Für Beweis: gilt. 19

20 Konvergenz Das Gradientenabstiegsverfahren mit einer Schrittweite, welche die Armijo-Bedingung erfüllt, konvergiert zu einem lokalen Minimum. Grund: Durch die Armijo-Bedingung, 0,1 ist sichergestellt, dass der Funktionswert in jeder Iteration sinkt, solange die notwendige Bedingung nicht erfüllt ist, also 0 Erinnerung: Wir gehen davon aus, dass einmal stetig differenzierbar ist. Notwendig für die Bestimmung des Gradienten und für Konvergenz zu einem lokalen Minimum. Nicht differenzierbares Beispiel Fixpunkt ist kein lokales Minimum 20

21 Zickzack-Verhalten des Gradientenabstiegverfahrens Auf dem Weg zum Minimum werden immer wieder dieselben Richtungen gewählt ineffizient Mit einer Reihe von orthogonalen Richtungen, wären wir wesentlich schneller beim Minimum. Im Falle einer quadratischen Zielfunktion sogar in Schritten Hierfür bräuchten wir aber die Eigenvektoren von auch ineffizient 21
22 Conjugate Gradient (CG) Verfahren Statt Orthogonalität im Euklidischen Raum, Orthogonalität mit der durch definierten Metrik: A-orthogonale Vektoren für zwei unterschiedliche quadratische Zielfunktionen Author: J. Shewchuk 22
23 CG Verfahren für quadratische Funktionen Wähle als erste Richtung den Gradienten an der Startposition : Wähle die optimale Schrittweite: Neue Lösung: analytische Lösung im Fall quadratischer Funktionen, da dann 0 eine lineare Gleichung ist Wähle neue, konjugierte Richtung mit zur Orthogonalisierung 23
24 CG Verfahren zum Lösen linearer Gleichungssysteme Der Minimierer von entspricht der Lösung des linearen Gleichungssystems Notwendige Bedingung für ein Minimum von : Das CG Verfahren wird daher meist zum Lösen linearer Gleichungssysteme eingesetzt. Die Effizienz hängt von der Konditionszahl von ab. Die Konditionszahl einer Matrix ist der größte Eigenwert geteilt durch den kleinsten. Bei exakter Zahlendarstellung garantiert das CG Verfahren in Schritten die exakte Lösung, bei kleiner Konditionszahl bereits wesentlich schneller. 24
25 Links: höhere Konditionszahl. CG Verfahren konvergiert nach 2 Schritten. Rechts: Konditionszahl = 1. CG Verfahren konvergiert in einem Schritt. Author: J. Shewchuk Das CG Verfahren wird daher oft mit einem Präkonditionierer kombiniert, der vorab die Konditionszahl der Matrix reduziert. mehr in der Vorlesung Bildverarbeitung 25
26 Verallgemeinerung für nicht-quadratische Funktionen Wähle als erste Richtung den Gradienten an der Startposition : Wähle die optimale Schrittweite mithilfe von Line Search (keine analytische Lösung verfügbar) Neue Lösung: Wähle neue, konjugierte Richtung mit zur Orthogonalisierung (Fletcher/Reeves) Andere Orthogonalisierungsverfahren möglich (z.b. Polak/Ribiére) 26
27 Zusammenfassung Für Minimierungsaufgaben auf konvexen Mengen und konvexen Funktionen lässt sich das Minimum garantieren. Gradientenabstieg ist ein einfaches Verfahren zur lokalen Minimierung allgemeiner differenzierbarer Funktionen. Die Schrittweitenwahl führt zu einem eindimensionalen Minimierungsproblem. Eine effizientere Variante ist das CG Verfahren. Insbesondere quadratische Funktionen lassen sich damit effizient minimieren. 27
Optimierung. Optimierung. Vorlesung 4 Newton und Quasi Newton Verfahren (Teil II) 2013 Thomas Brox, Fabian Kuhn
 2013 Thomas Brox, Fabian Kuhn") Optimierung Vorlesung 4 Newton und Quasi Newton Verfahren (Teil II) 1 Newton Verfahren Taylor Approximation 1. Ordnung von Newton Verfahren! 0 Setze 0und berechne Löse lineares Gleichungssystem für : 2
Optimierung Vorlesung 4 Newton und Quasi Newton Verfahren (Teil II) 1 Newton Verfahren Taylor Approximation 1. Ordnung von Newton Verfahren! 0 Setze 0und berechne Löse lineares Gleichungssystem für : 2
Das Gradientenverfahren
 Das Gradientenverfahren - Proseminar: Algorithmen der Nichtlinearen Optimierung - David Beisel December 10, 2012 David Beisel Das Gradientenverfahren December 10, 2012 1 / 28 Gliederung 0 Einführung 1
Das Gradientenverfahren - Proseminar: Algorithmen der Nichtlinearen Optimierung - David Beisel December 10, 2012 David Beisel Das Gradientenverfahren December 10, 2012 1 / 28 Gliederung 0 Einführung 1
Newton-Verfahren zur gleichungsbeschränkten Optimierung. 1 Gleichungsbeschränkte Optimierungsprobleme
 Newton-Verfahren zur gleichungsbeschränkten Optimierung Armin Farmani Anosheh (afarmani@mail.uni-mannheim.de) 3.Mai 2016 1 Gleichungsbeschränkte Optimierungsprobleme Einleitung In diesem Vortrag geht es
Newton-Verfahren zur gleichungsbeschränkten Optimierung Armin Farmani Anosheh (afarmani@mail.uni-mannheim.de) 3.Mai 2016 1 Gleichungsbeschränkte Optimierungsprobleme Einleitung In diesem Vortrag geht es
3 Optimierung mehrdimensionaler Funktionen f : R n R
 3 Optimierung mehrdimensionaler Funktionen f : R n R 31 Optimierung ohne Nebenbedingungen Optimierung heißt eigentlich: Wir suchen ein x R n so, dass f(x ) f(x) für alle x R n (dann heißt x globales Minimum)
3 Optimierung mehrdimensionaler Funktionen f : R n R 31 Optimierung ohne Nebenbedingungen Optimierung heißt eigentlich: Wir suchen ein x R n so, dass f(x ) f(x) für alle x R n (dann heißt x globales Minimum)
9 Optimierung mehrdimensionaler reeller Funktionen f : R n R
 9 Optimierung mehrdimensionaler reeller Funktionen f : R n R 91 Optimierung ohne Nebenbedingungen Ein Optimum zu suchen heißt, den größten oder den kleinsten Wert zu suchen Wir suchen also ein x R n, sodass
9 Optimierung mehrdimensionaler reeller Funktionen f : R n R 91 Optimierung ohne Nebenbedingungen Ein Optimum zu suchen heißt, den größten oder den kleinsten Wert zu suchen Wir suchen also ein x R n, sodass
Kontinuierliche Optimierung
 Kontinuierliche Optimierung Markus Herrich Wintersemester 2018/19 ii Inhaltsverzeichnis 2 Optimalitäts- und Regularitätsbedingungen 1 2.1 Einleitung und Wiederholung.................... 1 2.2 Optimalitätsbedingungen
Kontinuierliche Optimierung Markus Herrich Wintersemester 2018/19 ii Inhaltsverzeichnis 2 Optimalitäts- und Regularitätsbedingungen 1 2.1 Einleitung und Wiederholung.................... 1 2.2 Optimalitätsbedingungen
Optimierung für Nichtmathematiker
 Optimierung für Nichtmathematiker Prof. Dr. R. Herzog WS2/ / Inhaltsübersicht 3Einführung in die freie Optimierung 4Orakel und Modellfunktionen 5Optimalitätsbedingungen der freien Optimierung 6Das Newton-Verfahren
Optimierung für Nichtmathematiker Prof. Dr. R. Herzog WS2/ / Inhaltsübersicht 3Einführung in die freie Optimierung 4Orakel und Modellfunktionen 5Optimalitätsbedingungen der freien Optimierung 6Das Newton-Verfahren
Das Subgradientenverfahren
 Das Subgradientenverfahren Seminar Optimierung WS 05/06 Betreuer: Prof. F. Jarre von Jalo Liljo Das Subgradientenverfahren Das Ziel dieses Vortrags ist die Berechnung einer Lösung des unrestringierten
Das Subgradientenverfahren Seminar Optimierung WS 05/06 Betreuer: Prof. F. Jarre von Jalo Liljo Das Subgradientenverfahren Das Ziel dieses Vortrags ist die Berechnung einer Lösung des unrestringierten
Newton- und und Quasi-Newton-Methoden in der Optimierung. János Mayer
 Newton- und und Quasi-Newton-Methoden in der Optimierung János Mayer 1 GLIEDERUNG Newton-Methode für nichtlineare Gleichungen nichtlineare Gleichungssysteme freie Minimierung. Quasi-Newton-Methoden für
Newton- und und Quasi-Newton-Methoden in der Optimierung János Mayer 1 GLIEDERUNG Newton-Methode für nichtlineare Gleichungen nichtlineare Gleichungssysteme freie Minimierung. Quasi-Newton-Methoden für
Optimale Steuerung 1
 Optimale Steuerung 1 Kapitel 6: Nichtlineare Optimierung unbeschränkter Probleme Prof. Dr.-Ing. Pu Li Fachgebiet Simulation und Optimale Prozesse (SOP) Beispiel: Parameteranpassung für Phasengleichgewicht
Optimale Steuerung 1 Kapitel 6: Nichtlineare Optimierung unbeschränkter Probleme Prof. Dr.-Ing. Pu Li Fachgebiet Simulation und Optimale Prozesse (SOP) Beispiel: Parameteranpassung für Phasengleichgewicht
Studientag zur Algorithmischen Mathematik
 Studientag zur Algorithmischen Mathematik Numerische Verfahren der nicht-linearen Optimierung Winfried Hochstättler Diskrete Mathematik und Optimierung FernUniversität in Hagen 1. Juli 2012 Outline Line
Studientag zur Algorithmischen Mathematik Numerische Verfahren der nicht-linearen Optimierung Winfried Hochstättler Diskrete Mathematik und Optimierung FernUniversität in Hagen 1. Juli 2012 Outline Line
Mathematik 2 für Wirtschaftsinformatik
 für Wirtschaftsinformatik Sommersemester 2012 Hochschule Augsburg Hinreichende Bedingung für lokale Extrema Voraussetzungen Satz D R n konvex und offen Funktion f : D R zweimal stetig partiell differenzierbar
für Wirtschaftsinformatik Sommersemester 2012 Hochschule Augsburg Hinreichende Bedingung für lokale Extrema Voraussetzungen Satz D R n konvex und offen Funktion f : D R zweimal stetig partiell differenzierbar
Vorlesung Einführung in die Mathematische Optimierung (Wintersemester 2013/14)
") Vorlesung Einführung in die Mathematische Optimierung (Wintersemester 3/) Kapitel : Optimierung ohne Nebenbedingungen Volker Kaibel Otto-von-Guericke Universität Magdeburg (Version vom. Oktober 3) Gliederung
Vorlesung Einführung in die Mathematische Optimierung (Wintersemester 3/) Kapitel : Optimierung ohne Nebenbedingungen Volker Kaibel Otto-von-Guericke Universität Magdeburg (Version vom. Oktober 3) Gliederung
Vorlesung Einführung in die Mathematische Optimierung (Wintersemester 2013/14)
") Vorlesung Einführung in die Mathematische Optimierung (Wintersemester 3/4) Kapitel : Optimierung ohne Nebenbedingungen Volker Kaibel Otto-von-Guericke Universität Magdeburg (Version vom. Oktober 3) Gliederung
Vorlesung Einführung in die Mathematische Optimierung (Wintersemester 3/4) Kapitel : Optimierung ohne Nebenbedingungen Volker Kaibel Otto-von-Guericke Universität Magdeburg (Version vom. Oktober 3) Gliederung
5.3.5 Abstiegs & Gradientenverfahren
 5.3 Iterative Lösungsverfahren für lineare Gleichungssysteme 5.3.5 Abstiegs & Gradientenverfahren Die bisher kennengelernten Iterationsverfahren zur Approximation von linearen Gleichungssystemen haben
5.3 Iterative Lösungsverfahren für lineare Gleichungssysteme 5.3.5 Abstiegs & Gradientenverfahren Die bisher kennengelernten Iterationsverfahren zur Approximation von linearen Gleichungssystemen haben
(d) das zu Grunde liegende Problem gut konditioniert ist.
 das zu Grunde liegende Problem gut konditioniert ist.") Aufgabe 0: (6 Punkte) Bitte kreuzen Sie die richtige Lösung an. Es ist jeweils genau eine Antwort korrekt. Für jede richtige Antwort erhalten Sie einen Punkt, für jede falsche Antwort wird Ihnen ein Punkt
Aufgabe 0: (6 Punkte) Bitte kreuzen Sie die richtige Lösung an. Es ist jeweils genau eine Antwort korrekt. Für jede richtige Antwort erhalten Sie einen Punkt, für jede falsche Antwort wird Ihnen ein Punkt
Optimierung. Optimierung. Vorlesung 5 Optimierung mit Nebenbedingungen Thomas Brox, Fabian Kuhn
 Optimierung Vorlesung 5 Optimierung mit Nebenbedingungen 1 Minimierung mit Gleichheitsrestriktionen Gegeben: Funktion,,,, : Ziel:,,, Unrestringierter Fall: Notwendige Bedingung für lokales Minimum keine
Optimierung Vorlesung 5 Optimierung mit Nebenbedingungen 1 Minimierung mit Gleichheitsrestriktionen Gegeben: Funktion,,,, : Ziel:,,, Unrestringierter Fall: Notwendige Bedingung für lokales Minimum keine
Optimierung für Nichtmathematiker
 Optimierung für Nichtmathematiker Prof. Dr. R. Herzog WS/ / Inhaltsübersicht 3Einführung in die freie Optimierung 4Orakel und Modellfunktionen 5Optimalitätsbedingungen der freien Optimierung 6Das Newton-Verfahren
Optimierung für Nichtmathematiker Prof. Dr. R. Herzog WS/ / Inhaltsübersicht 3Einführung in die freie Optimierung 4Orakel und Modellfunktionen 5Optimalitätsbedingungen der freien Optimierung 6Das Newton-Verfahren
Das Trust-Region-Verfahren
 Das Trust-Region-Verfahren Nadine Erath 13. Mai 2013... ist eine Methode der Nichtlinearen Optimierung Ziel ist es, das Minimum der Funktion f : R n R zu bestimmen. 1 Prinzip 1. Ersetzen f(x) durch ein
Das Trust-Region-Verfahren Nadine Erath 13. Mai 2013... ist eine Methode der Nichtlinearen Optimierung Ziel ist es, das Minimum der Funktion f : R n R zu bestimmen. 1 Prinzip 1. Ersetzen f(x) durch ein
VF-2: 2. Es seien x = 1 3 und y = π Bei der Berechnung von sin(x) sin(y) in M(10, 12, 99, 99) tritt. Auslöschung auf.
 sin(y) in M(10, 12, 99, 99) tritt. Auslöschung auf.") IGPM RWTH Aachen Verständnisfragen-Teil NumaMB H11 (24 Punkte) Es gibt zu jeder der 12 Aufgaben vier Teilaufgaben. Diese sind mit wahr bzw. falsch zu kennzeichnen (hinschreiben). Es müssen mindestens zwei
IGPM RWTH Aachen Verständnisfragen-Teil NumaMB H11 (24 Punkte) Es gibt zu jeder der 12 Aufgaben vier Teilaufgaben. Diese sind mit wahr bzw. falsch zu kennzeichnen (hinschreiben). Es müssen mindestens zwei
Rückblick auf die letzte Vorlesung. Bemerkung
 Bemerkung 1) Die Bedingung grad f (x 0 ) = 0 T definiert gewöhnlich ein nichtlineares Gleichungssystem zur Berechnung von x = x 0, wobei n Gleichungen für n Unbekannte gegeben sind. 2) Die Punkte x 0 D
Bemerkung 1) Die Bedingung grad f (x 0 ) = 0 T definiert gewöhnlich ein nichtlineares Gleichungssystem zur Berechnung von x = x 0, wobei n Gleichungen für n Unbekannte gegeben sind. 2) Die Punkte x 0 D
Seminarvortrag: Trust-Region-Verfahren
 Seminarvortrag: Trust-Region-Verfahren Helena Klump Universität Paderborn Dezember 2012 Helena Klump 1 / 22 Trust-Region-Verfahren Problemstellung Sei die Funktion f : R n R gegeben. Betrachtet wird das
Seminarvortrag: Trust-Region-Verfahren Helena Klump Universität Paderborn Dezember 2012 Helena Klump 1 / 22 Trust-Region-Verfahren Problemstellung Sei die Funktion f : R n R gegeben. Betrachtet wird das
Rückblick auf die letzte Vorlesung
 Rückblick auf die letzte Vorlesung 1. Anwendungen des Satzes über implizite Funktionen 2. Stationäre Punkte implizit definierter Funktionen 3. Reguläre Punkte 4. Singuläre Punkte Ausblick auf die heutige
Rückblick auf die letzte Vorlesung 1. Anwendungen des Satzes über implizite Funktionen 2. Stationäre Punkte implizit definierter Funktionen 3. Reguläre Punkte 4. Singuläre Punkte Ausblick auf die heutige
Nichtlineare Gleichungen, mehrere Unbekannte
 Dritte Vorlesung, 6. März 2008, Inhalt Aufarbeiten von Themen der letzten Vorlesung, und Nichtlineare Gleichungen, mehrere Unbekannte Systeme nichtlinearer Gleichungen Vektor- und Matrixnormen Fixpunkt-Iteration,
Dritte Vorlesung, 6. März 2008, Inhalt Aufarbeiten von Themen der letzten Vorlesung, und Nichtlineare Gleichungen, mehrere Unbekannte Systeme nichtlinearer Gleichungen Vektor- und Matrixnormen Fixpunkt-Iteration,
18.4 Das Newton-Verfahren
 18.4 Das Newton-Verfahren Ziel: Wir suchen die Nullstellen einer Funktion f : D R n, D R n : f(x) = 0 Wir kennen bereits die Fixpunktiteration x k+1 := Φ(x k ) mit Startwert x 0 und Iterationsvorschrift
18.4 Das Newton-Verfahren Ziel: Wir suchen die Nullstellen einer Funktion f : D R n, D R n : f(x) = 0 Wir kennen bereits die Fixpunktiteration x k+1 := Φ(x k ) mit Startwert x 0 und Iterationsvorschrift
Inhaltsübersicht für heute:
 Inhaltsübersicht für heute: Freie Nichtlineare Optimierung Orakel, lineares/quadratisches Modell Optimalitätsbedingungen Das Newton-Verfahren Line-Search-Verfahren Inhaltsübersicht für heute: Freie Nichtlineare
Inhaltsübersicht für heute: Freie Nichtlineare Optimierung Orakel, lineares/quadratisches Modell Optimalitätsbedingungen Das Newton-Verfahren Line-Search-Verfahren Inhaltsübersicht für heute: Freie Nichtlineare
Optimieren unter Nebenbedingungen
 Optimieren unter Nebenbedingungen Hier sucht man die lokalen Extrema einer Funktion f(x 1,, x n ) unter der Nebenbedingung dass g(x 1,, x n ) = 0 gilt Die Funktion f heißt Zielfunktion Beispiel: Gesucht
Optimieren unter Nebenbedingungen Hier sucht man die lokalen Extrema einer Funktion f(x 1,, x n ) unter der Nebenbedingung dass g(x 1,, x n ) = 0 gilt Die Funktion f heißt Zielfunktion Beispiel: Gesucht
Operations Research. Konvexe Funktionen. konvexe Funktionen. konvexe Funktionen. Rainer Schrader. 4. Juni Gliederung
 Operations Research Rainer Schrader Konvexe Funktionen Zentrum für Angewandte Informatik Köln 4. Juni 2007 1 / 84 2 / 84 wir haben uns bereits mit linearen Optimierungsproblemen beschäftigt wir werden
Operations Research Rainer Schrader Konvexe Funktionen Zentrum für Angewandte Informatik Köln 4. Juni 2007 1 / 84 2 / 84 wir haben uns bereits mit linearen Optimierungsproblemen beschäftigt wir werden
TECHNISCHE UNIVERSITÄT MÜNCHEN Fakultät für Mathematik. Grundlagen der Nichtlinearen Optimierung. Klausur zur Vorlesung WS 2008/09
 ................ Note I II Name Vorname 1 Matrikelnummer Studiengang (Hauptfach) Fachrichtung (Nebenfach) 2 Obige Angaben sind richtig: Unterschrift der Kandidatin/des Kandidaten 3 TECHNISCHE UNIVERSITÄT
................ Note I II Name Vorname 1 Matrikelnummer Studiengang (Hauptfach) Fachrichtung (Nebenfach) 2 Obige Angaben sind richtig: Unterschrift der Kandidatin/des Kandidaten 3 TECHNISCHE UNIVERSITÄT
Name: Matr.-Nr.: 2. Aufgabe 1. Gegeben sei die Matrix
 Name: Matr.-Nr.: 2 Aufgabe 1. Gegeben sei die Matrix 1 1 1 A = 3 3 3 2 2 2 (a) Bestimmen Sie Rang(A), Kern(A) und Bild(A). Ist A invertierbar? Geben Sie zwei verschiedene rechte Seiten b 1, b 2 an, so
Name: Matr.-Nr.: 2 Aufgabe 1. Gegeben sei die Matrix 1 1 1 A = 3 3 3 2 2 2 (a) Bestimmen Sie Rang(A), Kern(A) und Bild(A). Ist A invertierbar? Geben Sie zwei verschiedene rechte Seiten b 1, b 2 an, so
12. Potentialflächen und Optimierung
 Dr. Jens Döbler Computeranwendung in der Chemie Informatik für Chemiker(innen) 12. Potentialflächen und Optimierung Jens Döbler 2004 "Computer in der Chemie", WS 2003-04, Humboldt-Universität VL12 Folie
Dr. Jens Döbler Computeranwendung in der Chemie Informatik für Chemiker(innen) 12. Potentialflächen und Optimierung Jens Döbler 2004 "Computer in der Chemie", WS 2003-04, Humboldt-Universität VL12 Folie
Konvexe Menge. Eine Menge D R n heißt konvex, wenn für zwei beliebige Punkte x, y D auch die Verbindungsstrecke dieser Punkte in D liegt, d.h.
 Konvexe Menge Eine Menge D R n heißt konvex, wenn für zwei beliebige Punkte x, y D auch die Verbindungsstrecke dieser Punkte in D liegt, dh Kapitel Extrema konvex: h x + h y D für alle h [0, ], und x,
Konvexe Menge Eine Menge D R n heißt konvex, wenn für zwei beliebige Punkte x, y D auch die Verbindungsstrecke dieser Punkte in D liegt, dh Kapitel Extrema konvex: h x + h y D für alle h [0, ], und x,
Übung 5, Analytische Optimierung
 Übung 5, 5.7.2011 Analytische Optimierung Aufgabe 5.1 Bei der Herstellung von Konserven werden für Boden und Deckel bzw. für den Konservenmantel verschiedene Materialien verwendet, die g 1 = bzw. g 2 =
Übung 5, 5.7.2011 Analytische Optimierung Aufgabe 5.1 Bei der Herstellung von Konserven werden für Boden und Deckel bzw. für den Konservenmantel verschiedene Materialien verwendet, die g 1 = bzw. g 2 =
KAPITEL 3. Konvexe Funktionen
 KAPITEL 3 Konvexe Funktionen Sei F R n ein Definitionsbereich und f : F R eine Funktion. Unter dem Epigraphen von f versteht man die Menge epif = {(x, z) R n+1 x F, z R, z f(x)}. Man nennt f konvex, wenn
KAPITEL 3 Konvexe Funktionen Sei F R n ein Definitionsbereich und f : F R eine Funktion. Unter dem Epigraphen von f versteht man die Menge epif = {(x, z) R n+1 x F, z R, z f(x)}. Man nennt f konvex, wenn
2 Extrema unter Nebenbedingungen
 $Id: lagrange.tex,v 1.6 2012/11/06 14:26:21 hk Exp hk $ 2 Extrema unter Nebenbedingungen 2.1 Restringierte Optimierungsaufgaben Nachdem wir jetzt die bereits bekannten Techniken zur Bestimmung der lokalen
$Id: lagrange.tex,v 1.6 2012/11/06 14:26:21 hk Exp hk $ 2 Extrema unter Nebenbedingungen 2.1 Restringierte Optimierungsaufgaben Nachdem wir jetzt die bereits bekannten Techniken zur Bestimmung der lokalen
Praktische Optimierung
 Praktische Optimierung Dozent: Günter Rudolph Vertretung: Nicola Beume Wintersemester 2007/08 Universität Dortmund Fachbereich Informatik Lehrstuhl für Algorithm Engineering (LS11) Fachgebiet Computational
Praktische Optimierung Dozent: Günter Rudolph Vertretung: Nicola Beume Wintersemester 2007/08 Universität Dortmund Fachbereich Informatik Lehrstuhl für Algorithm Engineering (LS11) Fachgebiet Computational
Studientag zur Algorithmischen Mathematik
 Studientag zur Algorithmischen Mathematik Aufgaben zur nicht-linearen Optimierung Teil II Winfried Hochstättler Diskrete Mathematik und Optimierung FernUniversität in Hagen 1. Juli 2012 Aufgabe 5 Bestimmen
Studientag zur Algorithmischen Mathematik Aufgaben zur nicht-linearen Optimierung Teil II Winfried Hochstättler Diskrete Mathematik und Optimierung FernUniversität in Hagen 1. Juli 2012 Aufgabe 5 Bestimmen
5.10. Mehrdimensionale Extrema und Sattelpunkte
 5.1. Mehrdimensionale Extrema und Sattelpunkte Zur Erinnerung: Eine Funktion f von einer Teilmenge A des R n nach R hat im Punkt a ein (strenges) globales Maximum, falls f( x ) f( a ) (bzw. f( x ) < f(
5.1. Mehrdimensionale Extrema und Sattelpunkte Zur Erinnerung: Eine Funktion f von einer Teilmenge A des R n nach R hat im Punkt a ein (strenges) globales Maximum, falls f( x ) f( a ) (bzw. f( x ) < f(
VIII Inhaltsverzeichnis 4 Innere - Punkte - Methoden für Lineare Programme Exkurs: Newton -Verfahren,Konvergenzraten Anwendung:
 Inhaltsverzeichnis 1 Einleitung... 1 1.1 Modellbildung,mathematische Formulierung............... 1 1.2 Nichtlineare Programme................................. 2 1.3 Einteilung von nichtlinearen Programmen...
Inhaltsverzeichnis 1 Einleitung... 1 1.1 Modellbildung,mathematische Formulierung............... 1 1.2 Nichtlineare Programme................................. 2 1.3 Einteilung von nichtlinearen Programmen...
Praktische Optimierung
 Grundlagen klassischer Optimiertechniken Praktische Optimierung Wintersemester 2008/09 Prof Dr Günter Rudolph Lehrstuhl für Algorithm Engineering Fakultät für Informatik TU Dortmund Themen der heutigen
Grundlagen klassischer Optimiertechniken Praktische Optimierung Wintersemester 2008/09 Prof Dr Günter Rudolph Lehrstuhl für Algorithm Engineering Fakultät für Informatik TU Dortmund Themen der heutigen
NICHTRESTRINGIERTE OPTIMIERUNG
 3 NICHTRESTRINGIERTE OPTIMIERUNG Die Aufgabe, mit der wir uns im Folgen beschäftigen werden, ist die Lösung von Minimierungsproblemen der Form minimiere f(x) in R n, (3.1) wobei f : R n R eine gegebene
3 NICHTRESTRINGIERTE OPTIMIERUNG Die Aufgabe, mit der wir uns im Folgen beschäftigen werden, ist die Lösung von Minimierungsproblemen der Form minimiere f(x) in R n, (3.1) wobei f : R n R eine gegebene
Aufgabenkomplex 5: Hauptachsentransformation, Lineare Optimierung, Differentialrechnung in mehreren Veränderlichen
 Aufgabenkomplex 5: Hauptachsentransformation, Lineare Optimierung, Differentialrechnung in mehreren Veränderlichen 1. Bestimmen Sie für die folgenden Funktionen zunächst die kritischen Stellen und entscheiden
Aufgabenkomplex 5: Hauptachsentransformation, Lineare Optimierung, Differentialrechnung in mehreren Veränderlichen 1. Bestimmen Sie für die folgenden Funktionen zunächst die kritischen Stellen und entscheiden
Wirtschaftsmathematik für International Management (BA) und Betriebswirtschaft (BA)
 und Betriebswirtschaft (BA)") Wirtschaftsmathematik für International Management (BA) und Betriebswirtschaft (BA) Wintersemester 2014/15 Hochschule Augsburg : Gliederung 1 Grundlegende 2 Grundlegende 3 Aussagenlogik 4 Lineare Algebra
Wirtschaftsmathematik für International Management (BA) und Betriebswirtschaft (BA) Wintersemester 2014/15 Hochschule Augsburg : Gliederung 1 Grundlegende 2 Grundlegende 3 Aussagenlogik 4 Lineare Algebra
Mathematische Werkzeuge R. Neubecker, WS 2016 / 2017
 Mustererkennung Mathematische Werkzeuge R. Neubecker, WS 2016 / 2017 Optimierung: Lagrange-Funktionen, Karush-Kuhn-Tucker-Bedingungen Optimierungsprobleme Optimierung Suche nach dem Maximum oder Minimum
Mustererkennung Mathematische Werkzeuge R. Neubecker, WS 2016 / 2017 Optimierung: Lagrange-Funktionen, Karush-Kuhn-Tucker-Bedingungen Optimierungsprobleme Optimierung Suche nach dem Maximum oder Minimum
5 Numerische Mathematik
 6 5 Numerische Mathematik Die Numerische Mathematik setzt sich aus mehreren Einzelmodulen zusammen Für alle Studierenden ist das Modul Numerische Mathematik I: Grundlagen verpflichtend In diesem Modul
6 5 Numerische Mathematik Die Numerische Mathematik setzt sich aus mehreren Einzelmodulen zusammen Für alle Studierenden ist das Modul Numerische Mathematik I: Grundlagen verpflichtend In diesem Modul
Extremwerte von Funktionen mehrerer reeller Variabler
 Extremwerte von Funktionen mehrerer reeller Variabler Bei der Bestimmung der Extrema von (differenzierbaren) Funktionen f : R n R ist es sinnvoll, zuerst jene Stellen zu bestimmen, an denen überhaupt ein
Extremwerte von Funktionen mehrerer reeller Variabler Bei der Bestimmung der Extrema von (differenzierbaren) Funktionen f : R n R ist es sinnvoll, zuerst jene Stellen zu bestimmen, an denen überhaupt ein
Es wird vor allem auf die wesentlichen Ideen der Verfahren eingegangen und weniger auf Details.
 Kapitel 5 Lösungsverfahren Dieses Kapitel gibt einen Überblick über Lösungsverfahren für nichtlineare Optimierungsprobleme. Es wird vor allem auf die wesentlichen Ideen der Verfahren eingegangen und weniger
Kapitel 5 Lösungsverfahren Dieses Kapitel gibt einen Überblick über Lösungsverfahren für nichtlineare Optimierungsprobleme. Es wird vor allem auf die wesentlichen Ideen der Verfahren eingegangen und weniger
Institut für Geometrie und Praktische Mathematik
 RWTH Aachen IGPM RWTH Aachen Institut für Geometrie und Praktische Mathematik Verständnisfragen-Teil (24 Punkte) Es gibt zu jeder der 12 Aufgaben vier Teilaufgaben. Diese sind mit wahr bzw. falsch zu kennzeichnen
RWTH Aachen IGPM RWTH Aachen Institut für Geometrie und Praktische Mathematik Verständnisfragen-Teil (24 Punkte) Es gibt zu jeder der 12 Aufgaben vier Teilaufgaben. Diese sind mit wahr bzw. falsch zu kennzeichnen
Nichtlineare Gleichungssysteme
 Kapitel 5 Nichtlineare Gleichungssysteme 51 Einführung Wir betrachten in diesem Kapitel Verfahren zur Lösung von nichtlinearen Gleichungssystemen Nichtlineares Gleichungssystem: Gesucht ist eine Lösung
Kapitel 5 Nichtlineare Gleichungssysteme 51 Einführung Wir betrachten in diesem Kapitel Verfahren zur Lösung von nichtlinearen Gleichungssystemen Nichtlineares Gleichungssystem: Gesucht ist eine Lösung
Extrema multivariater Funktionen
 Extrema multivariater Funktionen Ist f (x ) ein Minimum (Maximum) einer stetig differenzierbaren skalaren Funktion f auf einer Umgebung U von x, so gilt grad f (x ) = (0,..., 0) t. Extrema multivariater
Extrema multivariater Funktionen Ist f (x ) ein Minimum (Maximum) einer stetig differenzierbaren skalaren Funktion f auf einer Umgebung U von x, so gilt grad f (x ) = (0,..., 0) t. Extrema multivariater
38 Iterative Verfahren für lineare Gleichungssysteme
 38 Iterative Verfahren für lineare Gleichungssysteme 38.1 Motivation Viele praktische Probleme führen auf sehr große lineare Gleichungssysteme, bei denen die Systemmatrix dünn besetzt ist, d. h. nur wenige
38 Iterative Verfahren für lineare Gleichungssysteme 38.1 Motivation Viele praktische Probleme führen auf sehr große lineare Gleichungssysteme, bei denen die Systemmatrix dünn besetzt ist, d. h. nur wenige
Institut für Geometrie und Praktische Mathematik
 RWTH Aachen Verständnisfragen-Teil Institut für Geometrie und Praktische Mathematik (24 Punkte) Es gibt zu jeder der 12 Aufgaben vier Teilaufgaben. Diese sind mit wahr bzw. falsch zu kennzeichnen (hinschreiben).
RWTH Aachen Verständnisfragen-Teil Institut für Geometrie und Praktische Mathematik (24 Punkte) Es gibt zu jeder der 12 Aufgaben vier Teilaufgaben. Diese sind mit wahr bzw. falsch zu kennzeichnen (hinschreiben).
Innere-Punkt-Methoden
 Innere-Punkt-Methoden Johannes Stemick 26.01.2010 Johannes Stemick () Innere-Punkt-Methoden 26.01.2010 1 / 28 Übersicht 1 Lineare Optimierung 2 Innere-Punkt-Methoden Path-following methods Potential reduction
Innere-Punkt-Methoden Johannes Stemick 26.01.2010 Johannes Stemick () Innere-Punkt-Methoden 26.01.2010 1 / 28 Übersicht 1 Lineare Optimierung 2 Innere-Punkt-Methoden Path-following methods Potential reduction
Anwendungen der Differentialrechnung
 KAPITEL 3 Anwendungen der Differentialrechnung 3.1 Lokale Maxima und Minima Definition 16: Sei f : D R eine Funktion von n Veränderlichen. Ein Punkt x heißt lokale oder relative Maximalstelle bzw. Minimalstelle
KAPITEL 3 Anwendungen der Differentialrechnung 3.1 Lokale Maxima und Minima Definition 16: Sei f : D R eine Funktion von n Veränderlichen. Ein Punkt x heißt lokale oder relative Maximalstelle bzw. Minimalstelle
Kapitel 12. Lagrange-Funktion. Josef Leydold Mathematik für VW WS 2017/18 12 Lagrange-Funktion 1 / 28. f (x, y) g(x, y) = c. f (x, y) = x y 2
 g(x, y) = c. f (x, y) = x y 2") Kapitel 12 Lagrange-Funktion Josef Leydold Mathematik für VW WS 2017/18 12 Lagrange-Funktion 1 / 28 Optimierung unter Nebenbedingungen Aufgabe: Berechne die Extrema der Funktion unter der Nebenbedingung
Kapitel 12 Lagrange-Funktion Josef Leydold Mathematik für VW WS 2017/18 12 Lagrange-Funktion 1 / 28 Optimierung unter Nebenbedingungen Aufgabe: Berechne die Extrema der Funktion unter der Nebenbedingung
Statistik. Sommersemester Stefan Etschberger. für Betriebswirtschaft, Internationales Management, Wirtschaftsinformatik und Informatik
 Stefan Etschberger für Betriebswirtschaft, Internationales Management, Wirtschaftsinformatik und Informatik Sommersemester 2017 Gliederung 1 : Einführung 2 Differenzieren 2 3 Deskriptive 4 Wahrscheinlichkeitstheorie
Stefan Etschberger für Betriebswirtschaft, Internationales Management, Wirtschaftsinformatik und Informatik Sommersemester 2017 Gliederung 1 : Einführung 2 Differenzieren 2 3 Deskriptive 4 Wahrscheinlichkeitstheorie
Regression IV: Anpassung mit nichtlinearen Funktionen. Teil B: Nicht linearisierbare Modelle. -Fortsetzung-
 Regression IV: Anpassung mit nichtlinearen Funktionen Teil B: Nicht linearisierbare Modelle -Fortsetzung- T. Kießling: Auswertung von Messungen und Fehlerrechnung - Linienformanpassung 13.06.2018 Vorlesung
Regression IV: Anpassung mit nichtlinearen Funktionen Teil B: Nicht linearisierbare Modelle -Fortsetzung- T. Kießling: Auswertung von Messungen und Fehlerrechnung - Linienformanpassung 13.06.2018 Vorlesung
Teil 6. Differentialrechnung mehrerer Veränderlicher
 Teil 6 Differentialrechnung mehrerer Veränderlicher 95 96 6.1 Topologie von Mengen Umgebung ε-umgebung eines Punktes x R n : B ε (x) = {y : y x < ε} Umgebung U von x: Menge, die eine ε-umgebung von x enthält
Teil 6 Differentialrechnung mehrerer Veränderlicher 95 96 6.1 Topologie von Mengen Umgebung ε-umgebung eines Punktes x R n : B ε (x) = {y : y x < ε} Umgebung U von x: Menge, die eine ε-umgebung von x enthält
FK WMS: Wirtschaftsmathematik 2, Einheit 7/8
 FK WMS: Wirtschaftsmathematik 2, Einheit 7/8 Markus Sinnl 1 markus.sinnl@univie.ac.at http://homepage.univie.ac.at/markus.sinnl basierend auf Folien von Dr. Ivana Ljubic, Mag. Christian Spreitzer und Mag.
FK WMS: Wirtschaftsmathematik 2, Einheit 7/8 Markus Sinnl 1 markus.sinnl@univie.ac.at http://homepage.univie.ac.at/markus.sinnl basierend auf Folien von Dr. Ivana Ljubic, Mag. Christian Spreitzer und Mag.
Die Tangentialebene. {(x, y, z) z = f(x 0, y 0 )+ f x (x 0, y 0 )(x x 0 )+ f. y (x 0, y 0 )(y y 0 )}
 z = f(x 0, y 0 )+ f x (x 0, y 0 )(x x 0 )+ f. y (x 0, y 0 )(y y 0 )}") Die Tangentialebene Der Graph der linearen Approximation ist Tangentialebene an den Graph der Funktion. In Symbolen: Es sei D R 2. Es sei f : D R, (x, y) f(x, y) differenzierbar. Dann ist {(x, y, z) z
Die Tangentialebene Der Graph der linearen Approximation ist Tangentialebene an den Graph der Funktion. In Symbolen: Es sei D R 2. Es sei f : D R, (x, y) f(x, y) differenzierbar. Dann ist {(x, y, z) z
Der CG-Algorithmus (Zusammenfassung)
") Der CG-Algorithmus (Zusammenfassung) Michael Karow Juli 2008 1 Zweck, Herkunft, Terminologie des CG-Algorithmus Zweck: Numerische Berechnung der Lösung x des linearen Gleichungssystems Ax = b für eine
Der CG-Algorithmus (Zusammenfassung) Michael Karow Juli 2008 1 Zweck, Herkunft, Terminologie des CG-Algorithmus Zweck: Numerische Berechnung der Lösung x des linearen Gleichungssystems Ax = b für eine
Wirtschaftsmathematik 00054: Mathematik für Wirtschaftswissenschaftler II Kurseinheit 2: Lineare Algebra II
 Wirtschaftsmathematik 00054: Mathematik für Wirtschaftswissenschaftler II Kurseinheit : Lineare Algebra II Leseprobe Autor: Univ.-Prof. Dr. Wilhelm Rödder Dr. Peter Zörnig 74 4 Extrema bei Funktionen mehrerer
Wirtschaftsmathematik 00054: Mathematik für Wirtschaftswissenschaftler II Kurseinheit : Lineare Algebra II Leseprobe Autor: Univ.-Prof. Dr. Wilhelm Rödder Dr. Peter Zörnig 74 4 Extrema bei Funktionen mehrerer
Inexakte Newton Verfahren
 Kapitel 3 Inexakte Newton Verfahren 3.1 Idee inexakter Newton Verfahren Wir betrachten weiterhin das nichtlineare Gleichungssystem F (x) = mit einer zumindest stetig differenzierbaren Funktion F : R n
Kapitel 3 Inexakte Newton Verfahren 3.1 Idee inexakter Newton Verfahren Wir betrachten weiterhin das nichtlineare Gleichungssystem F (x) = mit einer zumindest stetig differenzierbaren Funktion F : R n
2. Geben Sie für das Jacobi-Verfahren eine scharfe a-priori Abschätzung für den Fehler. x (10) x p
 x p") Wiederholungsaufgaben Algorithmische Mathematik Sommersemester Prof. Dr. Beuchler Markus Burkow Übungsaufgaben Aufgabe. (Jacobi-Verfahren) Gegeben sei das lineare Gleichungssystem Ax b = für A =, b = 3.
Wiederholungsaufgaben Algorithmische Mathematik Sommersemester Prof. Dr. Beuchler Markus Burkow Übungsaufgaben Aufgabe. (Jacobi-Verfahren) Gegeben sei das lineare Gleichungssystem Ax b = für A =, b = 3.
AM3: Differenzial- und Integralrechnung im R n. 1 Begriffe. 2 Norm, Konvergenz und Stetigkeit. x 1. x 2. f : x n. aus Platzgründen schreibt man:
 AM3: Differenzial- und Integralrechnung im R n 1 Begriffe f : x 1 f 1 x 1, x 2,..., x n ) x 2... f 2 x 1, x 2,..., x n )... x n f m x 1, x 2,..., x n ) }{{}}{{} R n R m aus Platzgründen schreibt man: f
AM3: Differenzial- und Integralrechnung im R n 1 Begriffe f : x 1 f 1 x 1, x 2,..., x n ) x 2... f 2 x 1, x 2,..., x n )... x n f m x 1, x 2,..., x n ) }{{}}{{} R n R m aus Platzgründen schreibt man: f
Lagrange-Multiplikatoren
 Lagrange-Multiplikatoren Ist x eine lokale Extremstelle der skalaren Funktion f unter den Nebenbedingungen g i (x) = 0, dann existieren Lagrange-Multiplikatoren λ i, so dass grad f (x ) = λ i grad g i
Lagrange-Multiplikatoren Ist x eine lokale Extremstelle der skalaren Funktion f unter den Nebenbedingungen g i (x) = 0, dann existieren Lagrange-Multiplikatoren λ i, so dass grad f (x ) = λ i grad g i
Mathematik 1 für Wirtschaftsinformatik
 Mathematik 1 für Wirtschaftsinformatik Wintersemester 2012/13 Hochschule Augsburg : Gliederung 7 Folgen und Reihen 8 Finanzmathematik 9 Reelle Funktionen 10 Differenzieren 1 11 Differenzieren 2 12 Integration
Mathematik 1 für Wirtschaftsinformatik Wintersemester 2012/13 Hochschule Augsburg : Gliederung 7 Folgen und Reihen 8 Finanzmathematik 9 Reelle Funktionen 10 Differenzieren 1 11 Differenzieren 2 12 Integration
Wir untersuchen in diesem Abschnitt das (lokale) Newton Verfahren zur Lösung eines nichtlinearen Gleichungssystems
 Newton Verfahren zur Lösung eines nichtlinearen Gleichungssystems") Kapitel 2 Newton Verfahren 2.1 Das lokale Newton Verfahren Wir untersuchen in diesem Abschnitt das (lokale) Newton Verfahren zur Lösung eines nichtlinearen Gleichungssystems F (x) = 0 (2.1) mit einer zumindest
Kapitel 2 Newton Verfahren 2.1 Das lokale Newton Verfahren Wir untersuchen in diesem Abschnitt das (lokale) Newton Verfahren zur Lösung eines nichtlinearen Gleichungssystems F (x) = 0 (2.1) mit einer zumindest
Numerische Methoden und Algorithmen in der Physik
 Numerische Methoden und Algorithmen in der Physik Hartmut Stadie, Christian Autermann 11.12.2008 Numerische Methoden und Algorithmen in der Physik Hartmut Stadie 1/ 18 Einführung Einführung Verfahren für
Numerische Methoden und Algorithmen in der Physik Hartmut Stadie, Christian Autermann 11.12.2008 Numerische Methoden und Algorithmen in der Physik Hartmut Stadie 1/ 18 Einführung Einführung Verfahren für
Bildverarbeitung: Kontinuierliche Energieminimierung. D. Schlesinger BV: () Kontinuierliche Energieminimierung 1 / 9
 Kontinuierliche Energieminimierung 1 / 9") Bildverarbeitung: Kontinuierliche Energieminimierung D. Schlesinger BV: () Kontinuierliche Energieminimierung 1 / 9 Idee Statt zu sagen, wie die Lösung geändert werden muss (explizite Algorithmus, Diffusion),
Bildverarbeitung: Kontinuierliche Energieminimierung D. Schlesinger BV: () Kontinuierliche Energieminimierung 1 / 9 Idee Statt zu sagen, wie die Lösung geändert werden muss (explizite Algorithmus, Diffusion),
Kuhn-Tucker Bedingung
 Kapitel 13 Kuhn-Tucker Bedingung Josef Leydold Mathematik für VW WS 017/18 13 Kuhn-Tucker Bedingung 1 / Optimierung unter Nebenbedingungen Aufgabe: Berechne das Maximum der Funktion f (x, y) g(x, y) c,
Kapitel 13 Kuhn-Tucker Bedingung Josef Leydold Mathematik für VW WS 017/18 13 Kuhn-Tucker Bedingung 1 / Optimierung unter Nebenbedingungen Aufgabe: Berechne das Maximum der Funktion f (x, y) g(x, y) c,
Ausgleichsproblem. Definition (1.0.3)
") Ausgleichsproblem Definition (1.0.3) Gegeben sind n Wertepaare (x i, y i ), i = 1,..., n mit x i x j für i j. Gesucht ist eine stetige Funktion f, die die Wertepaare bestmöglich annähert, d.h. dass möglichst
Ausgleichsproblem Definition (1.0.3) Gegeben sind n Wertepaare (x i, y i ), i = 1,..., n mit x i x j für i j. Gesucht ist eine stetige Funktion f, die die Wertepaare bestmöglich annähert, d.h. dass möglichst
Lösungsvorschlag zur Nachklausur zur Analysis
 Prof Dr H Garcke, D Depner SS 09 NWF I - Mathematik 080009 Universität Regensburg Lösungsvorschlag zur Nachklausur zur Analysis Aufgabe Untersuchen Sie folgende Reihen auf Konvergenz und berechnen Sie
Prof Dr H Garcke, D Depner SS 09 NWF I - Mathematik 080009 Universität Regensburg Lösungsvorschlag zur Nachklausur zur Analysis Aufgabe Untersuchen Sie folgende Reihen auf Konvergenz und berechnen Sie
II. Nichtlineare Optimierung
 II. Nichtlineare Optimierung 1. Problemstellungen 2. Grundlagen 3. Probleme ohne Nebenbedingungen 4. Probleme mit Nebenbedingungen Theorie 5. Probleme mit Nebenbedingungen Verfahren H. Weber, FHW, OR SS06,
II. Nichtlineare Optimierung 1. Problemstellungen 2. Grundlagen 3. Probleme ohne Nebenbedingungen 4. Probleme mit Nebenbedingungen Theorie 5. Probleme mit Nebenbedingungen Verfahren H. Weber, FHW, OR SS06,
Numerische Optimierung
 Numerische Optimierung 6 In den ersten fünf Kapiteln dieses Skriptes haben wir Grundaufgaben der biomedizinischen Bildgebung eingeführt, im Sinne von Variationsmethoden modelliert und ihre Analyse in geeigneten
Numerische Optimierung 6 In den ersten fünf Kapiteln dieses Skriptes haben wir Grundaufgaben der biomedizinischen Bildgebung eingeführt, im Sinne von Variationsmethoden modelliert und ihre Analyse in geeigneten
Aufgabe 1. Berechnen Sie die absolute und die relative Kondition des Problems x f(x) für die Abbildung. x = x 2 e x 1.
 für die Abbildung. x = x 2 e x 1.") Name: Matrikel-Nr.: 1 Aufgabe 1. Berechnen Sie die absolute und die relative Kondition des Problems x f(x) für die Abbildung R 3 R 2, x 1 f : x 1 + e x2 2 sin(x3 ) x = x 2 e x 1 (1 + x 2 1 + x, 2x 3 )
Name: Matrikel-Nr.: 1 Aufgabe 1. Berechnen Sie die absolute und die relative Kondition des Problems x f(x) für die Abbildung R 3 R 2, x 1 f : x 1 + e x2 2 sin(x3 ) x = x 2 e x 1 (1 + x 2 1 + x, 2x 3 )
6.8 Newton Verfahren und Varianten
 6. Numerische Optimierung 6.8 Newton Verfahren und Varianten In den vorherigen Kapiteln haben wir grundlegende Gradienten-basierte Verfahren kennen gelernt, die man zur numerischen Optimierung von (unbeschränkten)
6. Numerische Optimierung 6.8 Newton Verfahren und Varianten In den vorherigen Kapiteln haben wir grundlegende Gradienten-basierte Verfahren kennen gelernt, die man zur numerischen Optimierung von (unbeschränkten)
2. Optimierungsprobleme 6
 6 2. Beispiele... 7... 8 2.3 Konvexe Mengen und Funktionen... 9 2.4 Konvexe Optimierungsprobleme... 0 2. Beispiele 7- Ein (NP-)Optimierungsproblem P 0 ist wie folgt definiert Jede Instanz I P 0 hat einen
6 2. Beispiele... 7... 8 2.3 Konvexe Mengen und Funktionen... 9 2.4 Konvexe Optimierungsprobleme... 0 2. Beispiele 7- Ein (NP-)Optimierungsproblem P 0 ist wie folgt definiert Jede Instanz I P 0 hat einen
Numerische Ableitung
 Numerische Ableitung Die Ableitung kann angenähert werden durch den Differentenquotient: f (x) f(x + h) f(x) h oder f(x + h) f(x h) 2h für h > 0, aber h 0. Beim numerischen Rechnen ist folgendes zu beachten:
Numerische Ableitung Die Ableitung kann angenähert werden durch den Differentenquotient: f (x) f(x + h) f(x) h oder f(x + h) f(x h) 2h für h > 0, aber h 0. Beim numerischen Rechnen ist folgendes zu beachten:
(a), für i = 1,..., n.
, für i = 1,..., n.") .4 Extremwerte Definition Sei M R n eine Teilmenge, f : M R stetig, a M ein Punkt. f hat in a auf M ein relatives (oder lokales) Maximum bzw. ein relatives (oder lokales) Minimum, wenn es eine offene Umgebung
.4 Extremwerte Definition Sei M R n eine Teilmenge, f : M R stetig, a M ein Punkt. f hat in a auf M ein relatives (oder lokales) Maximum bzw. ein relatives (oder lokales) Minimum, wenn es eine offene Umgebung
Newton-Verfahren für ein Skalarfunktion
 Newton-Verfahren für ein Skalarfunktion Für eine Näherungsberechnung von Nullstellen einer reellen Funktion f(x) : R R benutzt man das Newton-Verfahren: x (n+1) = x (n) f(x (n) )/f (x (n) ). Das Newton-Verfahren
Newton-Verfahren für ein Skalarfunktion Für eine Näherungsberechnung von Nullstellen einer reellen Funktion f(x) : R R benutzt man das Newton-Verfahren: x (n+1) = x (n) f(x (n) )/f (x (n) ). Das Newton-Verfahren
Klausur zu Grundlagen der Computermathematik
 Prof. Dr. Klaus Höllig 14. Oktober 2010 Klausur zu Grundlagen der Computermathematik en Aufgabe 1 Geben Sie (ohne Beweis an, welche der folgenden Aussagen richtig und welche falsch sind. a Die Folge A
Prof. Dr. Klaus Höllig 14. Oktober 2010 Klausur zu Grundlagen der Computermathematik en Aufgabe 1 Geben Sie (ohne Beweis an, welche der folgenden Aussagen richtig und welche falsch sind. a Die Folge A
Globale Newton Verfahren
 Betrachten: System von n nichtlinearen Gleichungen: F : D R n, F C 1 D Gesucht: x D, sodass F x =0. Vorher: Bedingungen für Startwert wie z.b. x x 0 2 / garantieren die Konvergenz des lokalen Newton-Verfahrens
Betrachten: System von n nichtlinearen Gleichungen: F : D R n, F C 1 D Gesucht: x D, sodass F x =0. Vorher: Bedingungen für Startwert wie z.b. x x 0 2 / garantieren die Konvergenz des lokalen Newton-Verfahrens
eps für alle x D. 4. Die Zahl 256 ist in M(2, 4, 6, 6) exakt darstellbar.
 exakt darstellbar.") IGPM RWTH Aachen Verständnisfragen-Teil NumaMB H13 (24 Punkte) Es gibt zu jeder der 12 Aufgaben vier Teilaufgaben. Diese sind mit wahr bzw. falsch zu kennzeichnen (hinschreiben). Es müssen mindestens zwei
IGPM RWTH Aachen Verständnisfragen-Teil NumaMB H13 (24 Punkte) Es gibt zu jeder der 12 Aufgaben vier Teilaufgaben. Diese sind mit wahr bzw. falsch zu kennzeichnen (hinschreiben). Es müssen mindestens zwei
Nichtlineare Gleichungen in einer und mehreren Unbekannten
 Gleichungen in einer und mehreren Unbekannten 2. Vorlesung 170004 Numerische Methoden I Clemens Brand 26. Februar 2009, Gliederung,, Gleichungen in einer Variablen Was ist... Wie geht... eine lineare (nichtlineare,
Gleichungen in einer und mehreren Unbekannten 2. Vorlesung 170004 Numerische Methoden I Clemens Brand 26. Februar 2009, Gliederung,, Gleichungen in einer Variablen Was ist... Wie geht... eine lineare (nichtlineare,
Höhere Mathematik II für die Fachrichtung Physik Lösungsvorschläge zum 8. Übungsblatt. ). 12x 3 Die Hessematrix von f ist gegeben durch H f (x, y) =
. 12x 3 Die Hessematrix von f ist gegeben durch H f (x, y) =") Karlsruher Institut für Technologie (KIT Institut für Analysis Priv-Doz Dr P C Kunstmann Dipl-Math D Roth SS 0 7060 Höhere Mathematik II für die Fachrichtung Physik Lösungsvorschläge zum 8 Übungsblatt
Karlsruher Institut für Technologie (KIT Institut für Analysis Priv-Doz Dr P C Kunstmann Dipl-Math D Roth SS 0 7060 Höhere Mathematik II für die Fachrichtung Physik Lösungsvorschläge zum 8 Übungsblatt
Numerische Verfahren zur Lösung unrestringierter Optimierungsaufgaben. Eine kurze Einführung in Quasi Newton Verfahren
 Ergänzungen zu dem Buch Numerische Verfahren zur Lösung unrestringierter Optimierungsaufgaben von Carl Geiger und Christian Kanzow (Springer Verlag, 1999) Eine kurze Einführung in Quasi Newton Verfahren
Ergänzungen zu dem Buch Numerische Verfahren zur Lösung unrestringierter Optimierungsaufgaben von Carl Geiger und Christian Kanzow (Springer Verlag, 1999) Eine kurze Einführung in Quasi Newton Verfahren
Musterlösung zu Blatt 1
 Musterlösung zu Blatt Analysis III für Lehramt Gymnasium Wintersemester 0/4 Überprüfe zunächst die notwendige Bedingung Dfx y z = 0 für die Existenz lokaler Extrema Mit x fx y z = 8x und y fx y z = + z
Musterlösung zu Blatt Analysis III für Lehramt Gymnasium Wintersemester 0/4 Überprüfe zunächst die notwendige Bedingung Dfx y z = 0 für die Existenz lokaler Extrema Mit x fx y z = 8x und y fx y z = + z
Musterlösung zu den Übungen zur Vorlesung Mathematik für Physiker II. x 2
 Musterlösung zu den Übungen zur Vorlesung Mathematik für Physiker II Wiederholungsblatt: Analysis Sommersemester 2011 W. Werner, F. Springer erstellt von: Max Brinkmann Aufgabe 1: Untersuchen Sie, ob die
Musterlösung zu den Übungen zur Vorlesung Mathematik für Physiker II Wiederholungsblatt: Analysis Sommersemester 2011 W. Werner, F. Springer erstellt von: Max Brinkmann Aufgabe 1: Untersuchen Sie, ob die
VF-3: Es seien A R n n beliebig aber regulär, b R n und gesucht sei die Lösung x R n von A x = b.
 NumaMB F14 Verständnisfragen-Teil (24 Punkte) Es gibt zu jeder der 12 Aufgaben vier Teilaufgaben. Diese sind mit wahr bzw. falsch zu kennzeichnen (hinschreiben). Bewertung: Vier Fragen richtig beantwortet
NumaMB F14 Verständnisfragen-Teil (24 Punkte) Es gibt zu jeder der 12 Aufgaben vier Teilaufgaben. Diese sind mit wahr bzw. falsch zu kennzeichnen (hinschreiben). Bewertung: Vier Fragen richtig beantwortet
Optimierung für Wirtschaftsinformatiker: Analytische Optimierung ohne Nebenbedingungen
 Optimierung für Wirtschaftsinformatiker: Analytische Optimierung ohne Nebenbedingungen Dr. Nico Düvelmeyer Freitag, 1. Juli 2011 1: 1 [1,1] Inhaltsübersicht für heute 1 Einführung und Wiederholung Beispiel
Optimierung für Wirtschaftsinformatiker: Analytische Optimierung ohne Nebenbedingungen Dr. Nico Düvelmeyer Freitag, 1. Juli 2011 1: 1 [1,1] Inhaltsübersicht für heute 1 Einführung und Wiederholung Beispiel
Problem lokaler Minima
 Optimierung Optimierung Häufige Aufgabe bei Parameterschätzung: Minimierung der negativen log-likelihood-funktion F(a) oder der Summe der quadratischen Abweichungen S(a) und Berechnung der Unsicherheit
Optimierung Optimierung Häufige Aufgabe bei Parameterschätzung: Minimierung der negativen log-likelihood-funktion F(a) oder der Summe der quadratischen Abweichungen S(a) und Berechnung der Unsicherheit
Wirtschaftsmathematik II
 WMS: Wirtschaftsmathematik 2 :: WS 2009/10 Wirtschaftsmathematik II Reinhard Ullrich http://homepage.univie.ac.at/reinhard.ullrich Basierend auf Folien von Dr. Ivana Ljubic October 11, 2009 1 Funktionen
WMS: Wirtschaftsmathematik 2 :: WS 2009/10 Wirtschaftsmathematik II Reinhard Ullrich http://homepage.univie.ac.at/reinhard.ullrich Basierend auf Folien von Dr. Ivana Ljubic October 11, 2009 1 Funktionen
Mathematik für Anwender II
 Prof. Dr. H. Brenner Osnabrück SS 2012 Mathematik für Anwender II Vorlesung 49 Zu einer reellwertigen Funktion Extrema auf einer offenen Menge G R n interessieren wir uns, wie schon bei einem eindimensionalen
Prof. Dr. H. Brenner Osnabrück SS 2012 Mathematik für Anwender II Vorlesung 49 Zu einer reellwertigen Funktion Extrema auf einer offenen Menge G R n interessieren wir uns, wie schon bei einem eindimensionalen
Inhaltsverzeichnis. Teil I Lineare Programmierung
 Inhaltsverzeichnis 1 Einleitung................................................ 1 1.1 Modellbildung, mathematische Formulierung............... 1 1.2 Nichtlineare Programme.................................
Inhaltsverzeichnis 1 Einleitung................................................ 1 1.1 Modellbildung, mathematische Formulierung............... 1 1.2 Nichtlineare Programme.................................
Lösungsvorschlag zur Modulprüfung Numerische Methoden Sommersemester 2016
 Institut für Analysis Prof Dr Michael Plum Lösungsvorschlag zur Modulprüfung Numerische Methoden Sommersemester 0 0090 Aufgabe Punkte: Betrachten Sie das lineare Gleichungssystem Ax = b mit A = 0 und b
Institut für Analysis Prof Dr Michael Plum Lösungsvorschlag zur Modulprüfung Numerische Methoden Sommersemester 0 0090 Aufgabe Punkte: Betrachten Sie das lineare Gleichungssystem Ax = b mit A = 0 und b
Name: Matr.-Nr.: 2. Aufgabe 1. Gegeben sei das folgende lineare Gleichungssystem: b a 2 3a 1
 Name: Matr.-Nr.: 2 Aufgabe 1. Gegeben sei das folgende lineare Gleichungssystem: 1 1 0 2 b 1 1 2 4 1 1 4 6 x = 1 1. 2 2 2a 2 3a 1 (a) Bringen Sie das lineare Gleichungssystem auf Treppenform. (b) Für welche
Name: Matr.-Nr.: 2 Aufgabe 1. Gegeben sei das folgende lineare Gleichungssystem: 1 1 0 2 b 1 1 2 4 1 1 4 6 x = 1 1. 2 2 2a 2 3a 1 (a) Bringen Sie das lineare Gleichungssystem auf Treppenform. (b) Für welche
18.2 Implizit definierte Funktionen
 18.2 Implizit definierte Funktionen Ziel: Untersuche Lösungsmengen von nichtlinearen Gleichungssystemen g(x) = 0 mit g : D R m, D R n, d.h. betrachte m Gleichungen für n Unbekannte mit m < n, d.h. wir
18.2 Implizit definierte Funktionen Ziel: Untersuche Lösungsmengen von nichtlinearen Gleichungssystemen g(x) = 0 mit g : D R m, D R n, d.h. betrachte m Gleichungen für n Unbekannte mit m < n, d.h. wir
Kalibrierung eines ökonomischen Szenariengenerators. Albert Meeser und Wiebke Burdag
 Kalibrierung eines ökonomischen Szenariengenerators Albert Meeser und Wiebke Burdag Übersicht Einführung Vasicek Modell Black Scholes mit Vasicek Optimierungsalgorithmen Implementierung Ergebnisse der
Kalibrierung eines ökonomischen Szenariengenerators Albert Meeser und Wiebke Burdag Übersicht Einführung Vasicek Modell Black Scholes mit Vasicek Optimierungsalgorithmen Implementierung Ergebnisse der
2 k k 1 k(k + 1) = 2n+1. n = 0 = k(k + 1) = 2n+1 n n. = 2 n+1 n + 2 (n + 1)(n + 2) + n. (n + 1)(n + 2)
 = 2n+1. n = 0 = k(k + 1) = 2n+1 n n. = 2 n+1 n + 2 (n + 1)(n + 2) + n. (n + 1)(n + 2)") Prof. Hesse Höhere Mathematik I und II Musterlösung 7. 0. 0, 80min Aufgabe (3 Punkte) Zeigen Sie mit vollständiger Induktion: Für alle n N gilt n k= k k k(k + ) = n+ n +. Induktionsanfang: k= Induktionsschluss
Prof. Hesse Höhere Mathematik I und II Musterlösung 7. 0. 0, 80min Aufgabe (3 Punkte) Zeigen Sie mit vollständiger Induktion: Für alle n N gilt n k= k k k(k + ) = n+ n +. Induktionsanfang: k= Induktionsschluss