Der Jacobs-Roboter, eine wissenschaftlich erfolgreiche Lösung vor dem Markteintritt
|
|
|
- Meike Beltz
- vor 6 Jahren
- Abrufe
Transkript


1 Der Jacobs-Roboter, eine wissenschaftlich erfolgreiche Lösung vor dem Markteintritt Andreas Birk Jacobs University Bremen



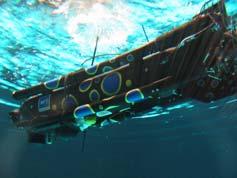





2 Forschungsschwerpunkt: Autonomous Systems Arbeiten von der Mechatronik bis zur Machinellen Intelligenz Anwendungsfelder Schutz und Rettung in weit geringerem Maße - Space (Planetenerkundung) - Unterwasser 2
3 Die Gruppe Gruppenmitglieder - 1x Postdoc, 7x Doktoranden, 9x Studenten (z.zt. wachsend) seit 2001 im Bereich Schutz- und Rettungsrobotik tätig - eine der ersten Forschungsgruppen in Europa starke internationale Vernetzung - National Institute of Standards and Technologies (NIST) - International Rescue System Institute, Japan erfolgreiche Teilnahmen an Tests- & Evaluierungen - amtierender Vizeweltmeister RoboCup Gewinner mehrerer RoboCup Regionalwettbewerbe, u.a. German Open Sieger European Land Robotics Trials (ELROB) im Combined Scenario Sieger ICRA Robotics Challenge 2008 im Planetary Exploration Scenario 3

4 Warum Autonome Intelligente Systeme? Beispiele für Added-Value durch Autonomie Bedienerunterstützung, z.b. Wegpunktnavigation auf automatisch erstellten Karten Überbrückung von Funkverlust mehrere Roboter bei nur einem Bediener Einsatz jenseits von ferngesteuerten Kameras - automatische Modellierung und Vermessung der Umgebung - Lokalisierung von Personen - Integration und Visualisierung von verschiedensten Datenströmen in einem Leitstand 4




5 Bestehende kommerzielle Systemklassen Mobile Kamera eye on the ground lokale Erfassung hohe Reichweite KEuro Schlangen hochmobile Systeme für enge Räume KEuro Flugroboter eye in the sky Überblickserfassung ½ -1 h Betriebszeit KEuro Mobiler Manipulator Manipulation oft notwendig Kameras als Standardsensoren Fertigung in kleinen Stückzahlen KEuro Hauptmarkt z.zt. Dual-Use: z.b. IRobot Packbot, >900 Systeme, gut 100 Millionen US$ Umsatz 5


6 Warum eine Eigenentwicklung? große Lücke im Markt bei mobilen Robotern: entweder Möglichkeiten für onboard Intelligenz hohe Rechenleistung offene Schnittstellen ausreichende Zuladung oder hohe Einsatztauglichkeit gute Mobilität lange Laufzeit Wetterfestigkeit Einsatztauglichkeit irobot Packbot??? zunehmend Bedarf für beide Aspekte im akademischen wie auch im professionellen Bereich ActivMedia Amigobot Möglichkeiten für Onboard Intelligenz 6
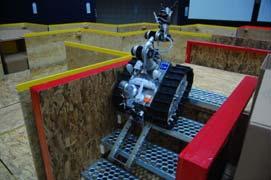
7 Der Aufbau des Rugbots (Rugged Robot) komplette Eigenentwicklung Locomotion Unit - Raupenfahrwerk - eigenständiges Modul - Batterien, 3h Betriebszeit Cognition Unit - kompletter PC - "Cognition" Software Communication Unit - RF-Ethernet - oder Glasfasersystem 7





8 Besonderes Designelement: der Rugbot Flipper Flipper: Zusatzraupen die ihre Position relativ zum Hauptkörper ändern können sind weitverbreitet Standard: Antrieb im Gelenk erfordert hohe Kräfte, sehr anfällig gegen Schock hier: Lineartrieb + passiver Link standard design rugbot flipper 8
9 Schritte zur Kommerzialisierung Überarbeitetes Systemkonzept - Kostenminimierung bei den Komponenten - Komponentenwahl für höhere Wartungfreiheit und Lebensdauer - Gewichtseinsparungen - vereinfachter Aufbau (kostengünstigere Montage) Ausloten von Geschäftsmodellen - Produktion und Endmontage - Vertrieb und Support 9






10 Die Onboard Intelligenz Wahrnehmung, z.b. - Human Detection, basierend auf Form - 3D Terrain Classification - 3D Objekt Erkennung Autonomes Agieren, z.b. - Hindernisvermeidung - Wegeplanung - Human-in-the-loop Integration, z.b. durch Setzen von Zielpunkten in Karten Weltmodellieren, z.b. - Erstellen von 2D Karten & - 3D Umgebungsmodellen in Echtzeit Planen, z.b. - Human-Machine-Interfaces für Mission Planning - koodinierte Exploration - Multi Robot Teams 10

 - von einer")





11 Maschinelles Erkennen von Menschen Eingabedaten - Bilder (2D) - von einer Thermokamera Repräsentation - Code für 3D Körpermodelle - in OpenGL Ergebnisse - Lernen von 3D Modellen - die den 2D Input reproduzieren Vorteile - Verdeckte Personen können erkannt werden - 3D Tiefeninformationen aus 2D Bildern 11

12 Erstellen & Nutzen von 3D Modellen in Echtzeit Datenaufbereitung & Fusion verschiedener 3D Sensoren - 3D Laserscanner - time-of-flight Kamera - Stereo Kamera Integration in 3D Modelle - 6D Lokalisierung - Flächenextraktion, Polygonalisierung Extraktion von 2D Karten - Ebenenmodelle mit Verlinkungen 12

13 Autonome Mobilität Beispiele C-ELROB 2007, Urban Scenario - Situationsaufklärung, nur ein Bediener - Jacobs: 2 Roboter kooperieren - eigenständiges Fahren zu dynamisch vorgegebenen Zielpunkten - sowie autonome Exploration - in kooperativ erstellen Karten ICRA Robot Challenge autonome planetare Erkundung - Verlassen eines Landers - 3D Terrainklassifizierung in Echtzeit - Erstellen von Karten und Wegplänen - Erreichen einer Science-Station - und Rückkehr mit Daten zum Lander 13
 in einem nicht-urbanen Gelände; Airrobot muss Stellen finden Landrobot muss sie erreichen - Kooperation Jacobs / Airrobot - Gewinner des")
14 Kooperation Land- / Flugroboter Flug/Landroboterdaten integrieren - Video, Telemetrie - in einem Bedienerinterface - Landroboter kann Flugroboter generierte Zielpunkte anfahren European Land Robot Trials Scenario Finden von Gefahrenstellen (Feuerherde) in einem nicht-urbanen Gelände; Airrobot muss Stellen finden Landrobot muss sie erreichen - Kooperation Jacobs / Airrobot - Gewinner des Combined Trials 14



15 Multi-Robot Kartenlernen neuer Algorithmus zum Erstellen von Karten durch Roboterteams - Karten werden individuell generiert - und über Ähnlichkeitsmaß zusammengefügt geeignet zum Einsatz auf Flugrobotern - Zusammenfügen von Bildkarten - Portables Mini Google Earth 4 Robotern, Fort AP Hill, USA 6 Roboter, R1 Gebäude, Jacobs Uni Quadcopter, >4000 Bilder, keine Lokalisierung 15

16 Evaluation, Training & Szenarienentwicklung Kooperation mit dem US National Institute of Standards and Technologies (NIST) Jacobs Test Arenas - eines von 6 Testgelände weltweit - standardisierte Testelemente (in den USA für Kaufentscheidungen verwendet) 16

")



17 Evaluation, Training & Szenarienentwicklung Urban Search and Rescue Simulator (USARsim) ebenfalls Kooperation mit NIST High Fidelity Robot Simulator - für Validierung und Training - kommerzielle Systeme werden zunehmend darin modelliert 17
18 weitere Informationen (und Videos) 18
LabVIEW Erfahrungen aus der
 Fraunhofer VolksBot mit CompactRIO und LabVIEW Erfahrungen aus der Lehrveranstaltungsreihe Teamrobotik Ansgar Bredenfeld, Fraunhofer IAIS Manuela Kanneberg, Timo Lindhorst, Edgar Nett, Otto-von-Guericke-Universität
Fraunhofer VolksBot mit CompactRIO und LabVIEW Erfahrungen aus der Lehrveranstaltungsreihe Teamrobotik Ansgar Bredenfeld, Fraunhofer IAIS Manuela Kanneberg, Timo Lindhorst, Edgar Nett, Otto-von-Guericke-Universität
Subsysteme: Software für Satellitensysteme
 Subsysteme: Software für Satellitensysteme B. Brünjes DLR Raumfahrtindustrietage, Bremen, 12./13. Juni 2008 Schwerpunkte der Softwareentwicklung bei OHB On-board Software für Satelliten Bodenkontroll-Software
Subsysteme: Software für Satellitensysteme B. Brünjes DLR Raumfahrtindustrietage, Bremen, 12./13. Juni 2008 Schwerpunkte der Softwareentwicklung bei OHB On-board Software für Satelliten Bodenkontroll-Software
Das E-Auto und intelligente Mobilitätskonzepte für übermorgen
 Das E-Auto und intelligente Mobilitätskonzepte für übermorgen Sicht der Forschung aus dem Bereich Künstliche Intelligenz und Robotik 31.10.2013, Baunatal Jens Mey DFKI Bremen & Universität Bremen Robotics
Das E-Auto und intelligente Mobilitätskonzepte für übermorgen Sicht der Forschung aus dem Bereich Künstliche Intelligenz und Robotik 31.10.2013, Baunatal Jens Mey DFKI Bremen & Universität Bremen Robotics
Autonome Systeme. Mehr zivile Sicherheit oder Verunsicherung?
 1 Autonome Systeme Mehr zivile Sicherheit oder Verunsicherung? Stefan Thamke, Klaus-Dieter Kuhnert Institute for Real-time (EZLS), University of Siegen Prof. Dr. K.-D. Kuhnert Institute for University
1 Autonome Systeme Mehr zivile Sicherheit oder Verunsicherung? Stefan Thamke, Klaus-Dieter Kuhnert Institute for Real-time (EZLS), University of Siegen Prof. Dr. K.-D. Kuhnert Institute for University
Entwicklung einer vereinfachten UAV-Kontrollstation für die Anwendung in einem Hubschraubercockpit. Dr.-Ing. G. Strickert
 Entwicklung einer vereinfachten UAV-Kontrollstation für die Anwendung in einem Hubschraubercockpit Dr.-Ing. G. Strickert Motivation Bedarf der Heeresflieger (Erkundung, Aufklärung, Unterstützung, Transport
Entwicklung einer vereinfachten UAV-Kontrollstation für die Anwendung in einem Hubschraubercockpit Dr.-Ing. G. Strickert Motivation Bedarf der Heeresflieger (Erkundung, Aufklärung, Unterstützung, Transport
Service-Robotik Herausforderungen und Trends. Prof. Dr. Frank Kirchner Universität Bremen, DFKI Robotik Labor Bremen Robert-Hooke-Str.
 Service-Robotik Herausforderungen und Trends Prof. Dr. Frank Kirchner Universität Bremen, DFKI Robotik Labor Bremen Robert-Hooke-Str. 5 28359 Bremen , Bremen Grundlagen zur Anwendung bringen Direkte Einbindung
Service-Robotik Herausforderungen und Trends Prof. Dr. Frank Kirchner Universität Bremen, DFKI Robotik Labor Bremen Robert-Hooke-Str. 5 28359 Bremen , Bremen Grundlagen zur Anwendung bringen Direkte Einbindung
Autonomous Systems Lab Zürich
 Philipp Krüsi 03.11.2011 Steuerung von UGVs Manuelle Fernsteuerung a) Fahrzeug in Sichtweite: Fahren auf Sicht b) Fahrzeug ausser Sicht: Steuerung mit Hilfe von Kamera-Bildern od. anderen Sensoren Autonome
Philipp Krüsi 03.11.2011 Steuerung von UGVs Manuelle Fernsteuerung a) Fahrzeug in Sichtweite: Fahren auf Sicht b) Fahrzeug ausser Sicht: Steuerung mit Hilfe von Kamera-Bildern od. anderen Sensoren Autonome
Rolland. Niels Schütte Hristo Gurdzhanov. 1 Vorstellung 2 Gliederung 3 Forschung 4 Rolland 1 5 Rolland 2. 6 Obstacle Map 7 Rolland 3 8 Projekte
 Rolland Niels Schütte Gliederung Forschung Rolland 1 Rolland 2 ObstacleMap Rolland 3 Projekte Probleme Finanzierung Forschung Navigation/Raumkognition Sichere Systeme Rolland 1 Kamera Jede Menge Sensoren
Rolland Niels Schütte Gliederung Forschung Rolland 1 Rolland 2 ObstacleMap Rolland 3 Projekte Probleme Finanzierung Forschung Navigation/Raumkognition Sichere Systeme Rolland 1 Kamera Jede Menge Sensoren
HSW Systemhaus Sicherheitstechnik
 HSW Systemhaus Sicherheitstechnik ein Produkt von Hanseatische Schutz- und Wachdienst GmbH DroneTracker 2.0 Sicherheit für Ihr Unternehmen und Ihren Luftraum Sichern Sie Ihren Luftraum! Wieso Dedrone?
HSW Systemhaus Sicherheitstechnik ein Produkt von Hanseatische Schutz- und Wachdienst GmbH DroneTracker 2.0 Sicherheit für Ihr Unternehmen und Ihren Luftraum Sichern Sie Ihren Luftraum! Wieso Dedrone?
3D Dentalscanner. AIT Austrian Institute of Technology Safety & Security Department. Manfred Gruber. Head of Business Unit
 3D Dentalscanner AIT Austrian Institute of Technology Safety & Security Department Manfred Gruber Head of Business Unit Safe and Autonomous Systems AIT Austrian Institute of Technology Größte außeruniversitäre
3D Dentalscanner AIT Austrian Institute of Technology Safety & Security Department Manfred Gruber Head of Business Unit Safe and Autonomous Systems AIT Austrian Institute of Technology Größte außeruniversitäre
Breitbandige Aufzeichnung und Wiedergabe. Manuel Bogedain, Noffz Computertechnik GmbH
 Breitbandige Aufzeichnung und Wiedergabe von RF Signalen für die GNSS Analyse Manuel Bogedain, Noffz Computertechnik GmbH Themenüberblick Einführung und Kurzvorstellung Herausforderungen an das Testen
Breitbandige Aufzeichnung und Wiedergabe von RF Signalen für die GNSS Analyse Manuel Bogedain, Noffz Computertechnik GmbH Themenüberblick Einführung und Kurzvorstellung Herausforderungen an das Testen
Quadrocopters and it s Applications: Overview of State of the Art Techniques
 : Overview of State of the Art Techniques Visual Tracking for Robotic Applications Sebastian Brunner Lehrstuhl für Echtzeitsysteme und Robotik Technische Universität München Email: brunnese@in.tum.de Date:
: Overview of State of the Art Techniques Visual Tracking for Robotic Applications Sebastian Brunner Lehrstuhl für Echtzeitsysteme und Robotik Technische Universität München Email: brunnese@in.tum.de Date:
Integration eines pneumatischen Roboters in die Robotics API
 Integration eines pneumatischen Roboters in die Robotics API Ziel: Integration eines AirArms in die Robotics API und Umsetzung eines Demo-Anwendung Idee: Die MRK (Mensch Roboter Kooperation) bekommt zunehmend
Integration eines pneumatischen Roboters in die Robotics API Ziel: Integration eines AirArms in die Robotics API und Umsetzung eines Demo-Anwendung Idee: Die MRK (Mensch Roboter Kooperation) bekommt zunehmend
VIRTUAL REALITY HYPE! Virtual Reality ist Super-Cool! Virtual Reality is Super-Cool! Virtual Bungee Jumping
 VIRTUAL REALITY Lebenseinstellung des Vortragenden Institut für Maschinelles Sehen und Darstellen Technische Universität Graz ist Super-Cool! Terminator 4 - der Film aus dem Cyberspace! [SKIP] Mit dem
VIRTUAL REALITY Lebenseinstellung des Vortragenden Institut für Maschinelles Sehen und Darstellen Technische Universität Graz ist Super-Cool! Terminator 4 - der Film aus dem Cyberspace! [SKIP] Mit dem
Roberta Workshops. Robotik in Forschung und Lehre. Roberta Workshops. 3 Schwerpunkte Robotik in Schulen
 Roberta Workshops Robotik in Forschung und Lehre Prof. Dr. Martina Lehser Fakultät für Ingenieurwissenschaften Fachrichtung Informatik 18.06.2009 ZeMA Roberta RegioZentrum Saarland Hochschule für Technik
Roberta Workshops Robotik in Forschung und Lehre Prof. Dr. Martina Lehser Fakultät für Ingenieurwissenschaften Fachrichtung Informatik 18.06.2009 ZeMA Roberta RegioZentrum Saarland Hochschule für Technik
RatSLAM. Torben Becker. 24. Mai HAW Hamburg
 HAW Hamburg 24. Mai 2012 Gliederung 1 Motivation 2 3 Aussicht 2 / 21 Motivation Warum SLAM? Navigation Umgebungskartografie Feststellung der Position innerhalb eines Geländes ohne Funksignale Keine vorherige
HAW Hamburg 24. Mai 2012 Gliederung 1 Motivation 2 3 Aussicht 2 / 21 Motivation Warum SLAM? Navigation Umgebungskartografie Feststellung der Position innerhalb eines Geländes ohne Funksignale Keine vorherige
Radikaler Umbruch in der Fahrzeug- und Systemabsicherung. Steffen Kuhn
 Radikaler Umbruch in der Fahrzeug- und Systemabsicherung Steffen Kuhn 21.04.2016 Autonomes Fahren ist das erklärte Ziel von Automobilherstellern, Zulieferern und Dienstleistern In Zukunft muss nicht nur
Radikaler Umbruch in der Fahrzeug- und Systemabsicherung Steffen Kuhn 21.04.2016 Autonomes Fahren ist das erklärte Ziel von Automobilherstellern, Zulieferern und Dienstleistern In Zukunft muss nicht nur
Testkonzept eines UAV Missionsplaners
 Testkonzept eines UAV Missionsplaners Christoph Torens, Florian Adolf German Aerospace Center (DLR) Institute of Flight Systems, Dept. Unmanned Aircraft DGLR Workshop 2013 Durchgängige Entwicklung von
Testkonzept eines UAV Missionsplaners Christoph Torens, Florian Adolf German Aerospace Center (DLR) Institute of Flight Systems, Dept. Unmanned Aircraft DGLR Workshop 2013 Durchgängige Entwicklung von
Verteilte Systeme / Kooperierende Roboter
 Verteilte Systeme / Kooperierende Roboter Proseminar Anwendungen und Methoden der Modernen Robotik SoSe 2005 Uni Hamburg Claudius Herder, Justus Winter 4herder@informatik.uni-hamburg.de, 4winter@informatik.uni-hamburg.de
Verteilte Systeme / Kooperierende Roboter Proseminar Anwendungen und Methoden der Modernen Robotik SoSe 2005 Uni Hamburg Claudius Herder, Justus Winter 4herder@informatik.uni-hamburg.de, 4winter@informatik.uni-hamburg.de
Selbstadaptation Kognitiver Service-Roboter. Bernd Krieg-Brückner Universität Bremen
 Selbstadaptation Kognitiver Service-Roboter Bernd Krieg-Brückner Universität Bremen Service-Roboter Logistik für autonomen Transport und Lagerhaltung Assistenzsysteme und Hilfen intelligente Rollstühle,
Selbstadaptation Kognitiver Service-Roboter Bernd Krieg-Brückner Universität Bremen Service-Roboter Logistik für autonomen Transport und Lagerhaltung Assistenzsysteme und Hilfen intelligente Rollstühle,
Workshops. Arbeitsgruppen in unserem Institut. Softwaretechnik und Systemsoftware. Netzbasierte Informationssysteme. IT-Sicherheit
 s Arbeitsgruppen in unserem Institut Softwaretechnik und Systemsoftware Netzbasierte Informationssysteme IT-Sicherheit Programmiersprachen und Rechnerarchitektur Datenbanken und Informationssysteme Technische
s Arbeitsgruppen in unserem Institut Softwaretechnik und Systemsoftware Netzbasierte Informationssysteme IT-Sicherheit Programmiersprachen und Rechnerarchitektur Datenbanken und Informationssysteme Technische
Was ist falsch an diesem Bild
 Crossmedia Crossmedia Crossmedia Crossmedia Was ist falsch an diesem Bild Was ist falsch an diesem Bild Warum funktioniert das Geschäftsmodell nicht mehr? heute Worum geht es also? Alte Welt vs. neue
Crossmedia Crossmedia Crossmedia Crossmedia Was ist falsch an diesem Bild Was ist falsch an diesem Bild Warum funktioniert das Geschäftsmodell nicht mehr? heute Worum geht es also? Alte Welt vs. neue
Modellbasierte Softwareentwicklung eines Kamera basierten Scheinwerfer-Adaptions-Algorithmus. Gerd Mauthe
 Modellbasierte Softwareentwicklung eines Kamera basierten Scheinwerfer-Adaptions-Algorithmus Gerd Mauthe München 10.05.2016 MATLAB Expo 2016 Inhalte Vorstellung Thema Algorithmus Konzepte Implementierung
Modellbasierte Softwareentwicklung eines Kamera basierten Scheinwerfer-Adaptions-Algorithmus Gerd Mauthe München 10.05.2016 MATLAB Expo 2016 Inhalte Vorstellung Thema Algorithmus Konzepte Implementierung
Generierung von Testfällen für eine Robotersteuerung
 Generierung von Testfällen für eine Robotersteuerung Ziel: Automatische Generierung, Ausführung und Prüfung von Testfällen Modellbasiertes Testen: (Mathematisches) Modell einer Roboteraktivität (z.b. Gleichungen)
Generierung von Testfällen für eine Robotersteuerung Ziel: Automatische Generierung, Ausführung und Prüfung von Testfällen Modellbasiertes Testen: (Mathematisches) Modell einer Roboteraktivität (z.b. Gleichungen)
Telematik trifft Geomatik
 B der Welt in 3D Die Vermessung Telematik trifft Geomatik Bild: Riegl Prof. Dr. Andreas Nüchter Was ist Telematik? Die Telematik integriert interdisziplinär Methoden der Telekommunikation, der Automatisierungs-technik
B der Welt in 3D Die Vermessung Telematik trifft Geomatik Bild: Riegl Prof. Dr. Andreas Nüchter Was ist Telematik? Die Telematik integriert interdisziplinär Methoden der Telekommunikation, der Automatisierungs-technik
Der Mensch als Vorbild für intelligente Assistenz -Transfer von Fertigkeiten -
 Der Mensch als Vorbild für intelligente Assistenz -Transfer von Fertigkeiten - Umwelt(-modell) zb. Strassenverkehr + Auto Oldenburg - Stadt der Wissenschaft Perspektivenwechsel 02.11.2009 Operator(-modell)
Der Mensch als Vorbild für intelligente Assistenz -Transfer von Fertigkeiten - Umwelt(-modell) zb. Strassenverkehr + Auto Oldenburg - Stadt der Wissenschaft Perspektivenwechsel 02.11.2009 Operator(-modell)
Mobile Robotik in der Produktion 4.0
 Automatisierungstage 2014 Mobile Robotik in der Produktion 4.0 Agenda Festo facts Anforderungen an die Mobile Robotik Lösungen für die Forschung und Bildung Aktuelle Forschungs- und Entwicklungsprojekte
Automatisierungstage 2014 Mobile Robotik in der Produktion 4.0 Agenda Festo facts Anforderungen an die Mobile Robotik Lösungen für die Forschung und Bildung Aktuelle Forschungs- und Entwicklungsprojekte
Navigation anhand natürlicher Landmarken mit Hilfe der Scale Invariant Feature Transform. Thorsten Jost INF-M2 AW1 Sommersemester
 Navigation anhand natürlicher Landmarken mit Hilfe der Scale Invariant Feature Transform Thorsten Jost INF-M2 AW1 Sommersemester 2008 Agenda Motivation Feature Detection Beispiele Posenbestimmung in Räumen
Navigation anhand natürlicher Landmarken mit Hilfe der Scale Invariant Feature Transform Thorsten Jost INF-M2 AW1 Sommersemester 2008 Agenda Motivation Feature Detection Beispiele Posenbestimmung in Räumen
Informationen zum RoboCup 2009 für Schulen
 Partner RoboCup 2009 Die Schulführungen werden unterstützt von Informationen zum RoboCup 2009 für Schulen Sponsored by Organizer Was ist RoboCup? Inhalt Was ist RoboCup Seite 3 RoboCup Ligen Seite 4 RoboCup
Partner RoboCup 2009 Die Schulführungen werden unterstützt von Informationen zum RoboCup 2009 für Schulen Sponsored by Organizer Was ist RoboCup? Inhalt Was ist RoboCup Seite 3 RoboCup Ligen Seite 4 RoboCup
Biologisch motivierter SLAM Algorithmus
 HAW Hamburg 01. Dezember 2011 Gliederung 1 Einführung 2 RatSLAM 3 Aussicht für Master 2 / 23 Einführung Was ist SLAM SLAM bedeutet: Simultaneous Localization and Mapping Erstellung einer Karte durch mobilen
HAW Hamburg 01. Dezember 2011 Gliederung 1 Einführung 2 RatSLAM 3 Aussicht für Master 2 / 23 Einführung Was ist SLAM SLAM bedeutet: Simultaneous Localization and Mapping Erstellung einer Karte durch mobilen
Materialflusssystemen
 Seite 1 / 21 Topographieerfassung und Berechnung von Bewegungsbahnen für Instandhaltungseinheiten auf Materialflusssystemen Dipl.-Ing. Matthias Bücker Dipl.-Ing. Tobias Brutscheck Teilprojektleiter: Prof.
Seite 1 / 21 Topographieerfassung und Berechnung von Bewegungsbahnen für Instandhaltungseinheiten auf Materialflusssystemen Dipl.-Ing. Matthias Bücker Dipl.-Ing. Tobias Brutscheck Teilprojektleiter: Prof.
Videoüberwachung und integrierte Sicherheitslösungen für Einzelhändler
 Videoüberwachung und integrierte Sicherheitslösungen für Einzelhändler Rundum sicher Lösungen für den Einzelhandel, die den Unterschied machen Ein modernes Videoüberwachungssystem liefert detaillierte
Videoüberwachung und integrierte Sicherheitslösungen für Einzelhändler Rundum sicher Lösungen für den Einzelhandel, die den Unterschied machen Ein modernes Videoüberwachungssystem liefert detaillierte
Blindennavigation. als Anwendung für Location-based Services. Andreas Hub
 Blindennavigation als Anwendung für Location-based Services Andreas Hub Motivation? Wo bin ich? Was ist vor mir? Wo ist die Tür? Wo ist der Eingang? Kommen Gefahren? Was ist im Weg? Probleme Orientierung
Blindennavigation als Anwendung für Location-based Services Andreas Hub Motivation? Wo bin ich? Was ist vor mir? Wo ist die Tür? Wo ist der Eingang? Kommen Gefahren? Was ist im Weg? Probleme Orientierung
Ettlingen _ 2008 WWW.VISION-COMPONENTS.COM // Ettlingen // 2008
 Ettlingen _ 2008 Wer ist VC VC ist innovativer Hersteller intelligenter Kameras für die industrielle Bildverarbeitung. Erfinder der ersten industriellen Smart Kamera (VC11) 1996. Geschäftsführer Michael
Ettlingen _ 2008 Wer ist VC VC ist innovativer Hersteller intelligenter Kameras für die industrielle Bildverarbeitung. Erfinder der ersten industriellen Smart Kamera (VC11) 1996. Geschäftsführer Michael
2. Niedersächsische Jahresfachtagung Industrie 4.0
 2. Niedersächsische Jahresfachtagung Industrie 4.0 Fachforum: Intelligente Prüftechnik für Produktion und Instandhaltung Volker Pape Vorstand Viscom AG Unternehmensprofil Inhalt: Viscom im Überblick Vernetzte
2. Niedersächsische Jahresfachtagung Industrie 4.0 Fachforum: Intelligente Prüftechnik für Produktion und Instandhaltung Volker Pape Vorstand Viscom AG Unternehmensprofil Inhalt: Viscom im Überblick Vernetzte
Studieneingangsphase für internationale Studierende online mit Open DC
 Karoline v. Köckritz Center für Digitale Systeme (CeDiS), Freie Universität Berlin Studieneingangsphase für internationale Studierende online mit Open DC ida-seminar, 30.09.2013 Karoline v. Köckritz CeDiS,
Karoline v. Köckritz Center für Digitale Systeme (CeDiS), Freie Universität Berlin Studieneingangsphase für internationale Studierende online mit Open DC ida-seminar, 30.09.2013 Karoline v. Köckritz CeDiS,
Steuerungstechnik für mobile Arbeitsmaschinen
 Steuerungstechnik für mobile Arbeitsmaschinen HYDAC Stammhaus Deutschland HYDAC Italien HYDAC Niederlande HYDAC Frankreich HYDAC Korea HYDAC China HYDAC USA Ihr kompetenter Partner für mobile Arbeitsmaschinen
Steuerungstechnik für mobile Arbeitsmaschinen HYDAC Stammhaus Deutschland HYDAC Italien HYDAC Niederlande HYDAC Frankreich HYDAC Korea HYDAC China HYDAC USA Ihr kompetenter Partner für mobile Arbeitsmaschinen
Webbasierter mobiler Kommunikationsroboter Ego Secundus
 3. Fachwissenschaftliches Kolloquium für Angewandte Automatisierungstechnik in Lehre und Entwicklung Webbasierter mobiler Kommunikationsroboter Ego Secundus Leistungen des Düsseldorfer Telelabors Projekt
3. Fachwissenschaftliches Kolloquium für Angewandte Automatisierungstechnik in Lehre und Entwicklung Webbasierter mobiler Kommunikationsroboter Ego Secundus Leistungen des Düsseldorfer Telelabors Projekt
Autonome Fahrzeuge. Eine Pro-Seminar Arbeit von. Patrick Bertsch. 1 Abstract
 Eine Pro-Seminar Arbeit von 2006 1 Abstract Die folgende Arbeit soll einen kurzen Einblick in das Gebiet der Künstlichen Intelligenz, im Bezug auf autonome Fahrzeuge, geben. Im folgenden sollen der Aufbau
Eine Pro-Seminar Arbeit von 2006 1 Abstract Die folgende Arbeit soll einen kurzen Einblick in das Gebiet der Künstlichen Intelligenz, im Bezug auf autonome Fahrzeuge, geben. Im folgenden sollen der Aufbau
Autos der Zukunft. Dr. Dominik Herrmann Universität Hamburg. Folien zum Download:
 Autos der Zukunft Dr. Dominik Herrmann Universität Hamburg Folien zum Download: http://dhgo.to/autosderzukunft Themen des Vortrags Einblick in die Technik Safety (unbeabsichtigte Ereignisse) Security (beabsichtigte
Autos der Zukunft Dr. Dominik Herrmann Universität Hamburg Folien zum Download: http://dhgo.to/autosderzukunft Themen des Vortrags Einblick in die Technik Safety (unbeabsichtigte Ereignisse) Security (beabsichtigte
Letzte Meile & Drohnen
 Letzte Meile & Drohnen Perspektiven und Anwendung des Modells der ApoAir/MRI "Arzneimittelversand 2015" Vortrag zu Technologien, Anwendungsfeldern & Perspektiven BVDVA e.v., 11.-12.06.2015 Agenda Letzte
Letzte Meile & Drohnen Perspektiven und Anwendung des Modells der ApoAir/MRI "Arzneimittelversand 2015" Vortrag zu Technologien, Anwendungsfeldern & Perspektiven BVDVA e.v., 11.-12.06.2015 Agenda Letzte
USB3 Vision Wohin geht die Reise?
 USB3 Vision Wohin geht die Reise? Rupert Stelz Gruppenleiter Bilderfassung STEMMER IMAGING GmbH Technologieforum Bildverarbeitung, 3. & 4. November 2015 ÜBERBLICK Die Technologie USB Eine schnelle Verbindung
USB3 Vision Wohin geht die Reise? Rupert Stelz Gruppenleiter Bilderfassung STEMMER IMAGING GmbH Technologieforum Bildverarbeitung, 3. & 4. November 2015 ÜBERBLICK Die Technologie USB Eine schnelle Verbindung
KASPRO Field I/O modules: Remote analog I/O module with linear inputs, 0-10 VDC/4-20mA(Dip selectable) RS485, Modbus RTU, 24 VDC PWR
 RS485, Modbus RTU, 24 VDC PWR") EZ-Preis Gewicht KASPRO Field I/O modules KAS-KA-FIOA-0800- L-B KASPRO Field I/O modules: Remote analog I/O module with linear inputs, 0-10 VDC/4-20mA(Dip selectable) RS485, Modbus RTU, 24 VDC PWR 199.0
EZ-Preis Gewicht KASPRO Field I/O modules KAS-KA-FIOA-0800- L-B KASPRO Field I/O modules: Remote analog I/O module with linear inputs, 0-10 VDC/4-20mA(Dip selectable) RS485, Modbus RTU, 24 VDC PWR 199.0
Autonomes Fahren Technologien und Chancen
 Shaping the future Autonomes Fahren Technologien und Chancen Roland Siegwart, ETH Zurich www.asl.ethz.ch www.wysszurich.ch ETH, Januar 31, 2017 Roland Siegwart 31.01.2017 1 Mobilität der Puls unserer Gesellschaft
Shaping the future Autonomes Fahren Technologien und Chancen Roland Siegwart, ETH Zurich www.asl.ethz.ch www.wysszurich.ch ETH, Januar 31, 2017 Roland Siegwart 31.01.2017 1 Mobilität der Puls unserer Gesellschaft
Vernetzte Industrie Vernetzte Systeme: Position, Strategie und Lösungen PLM Future 2016 Kaiserslautern Matthias Schmich Siemens Industry Software
 Vernetzte Industrie Vernetzte Systeme: Position, Strategie und Lösungen PLM Future 2016 Kaiserslautern Matthias Schmich Siemens Industry Software Siemens AG 2016 Was wird die Zukunft bringen? Wandel in
Vernetzte Industrie Vernetzte Systeme: Position, Strategie und Lösungen PLM Future 2016 Kaiserslautern Matthias Schmich Siemens Industry Software Siemens AG 2016 Was wird die Zukunft bringen? Wandel in
Xcalibur-2 Alpha. Time. Christian Rempis University of Applied Sciences Bonn-Rhein-Sieg 17. Januar 2006 1
 Time Christian Rempis University of Applied Sciences Bonn-Rhein-Sieg 17. Januar 2006 1 Control and Command Environment for a Robotic Experimenter R&D 1 Examination Presentation by Christian Rempis Christian
Time Christian Rempis University of Applied Sciences Bonn-Rhein-Sieg 17. Januar 2006 1 Control and Command Environment for a Robotic Experimenter R&D 1 Examination Presentation by Christian Rempis Christian
FRAUNHOFER-INSTITUT FÜR EINGEBETTETE SYSTEME UND KOMMUNIKATIONSTECHNIK ESK
 FRAUNHOFER-INSTITUT FÜR EINGEBETTETE SYSTEME UND KOMMUNIKATIONSTECHNIK ESK ESK Dr.-Ing. Mike Heidrich BICCnet Open Labs, München, 17. September 2014 Forschen für die Praxis Die Fraunhofer-Gesellschaft
FRAUNHOFER-INSTITUT FÜR EINGEBETTETE SYSTEME UND KOMMUNIKATIONSTECHNIK ESK ESK Dr.-Ing. Mike Heidrich BICCnet Open Labs, München, 17. September 2014 Forschen für die Praxis Die Fraunhofer-Gesellschaft
Willkommen. in der Welt der Hütten- und Walzwerks-Technologie. Moderne Automatisierungstopologien mit Echtzeit Ethernet am Beispiel EtherCAT
 Willkommen in der Welt der Hütten- und Walzwerks-Technologie Moderne Automatisierungstopologien mit Echtzeit Ethernet am Beispiel EtherCAT Rückblick: 20 Jahre Feldbus Bis 1989: -Zentrale Automatisierungssysteme
Willkommen in der Welt der Hütten- und Walzwerks-Technologie Moderne Automatisierungstopologien mit Echtzeit Ethernet am Beispiel EtherCAT Rückblick: 20 Jahre Feldbus Bis 1989: -Zentrale Automatisierungssysteme
Anwendungsplattform intelligente Mobilität Was ist AIM? Wie wirkt AIM? Wie wächst AIM?
 Anwendungsplattform intelligente Mobilität Was ist AIM? Wie wirkt AIM? Wie wächst AIM? Institut für Verkehrssystemtechnik PD Dr. Frank Köster 3. Mai 2010 > Folie 1 Was ist? Anwendungsplattform Intelligente
Anwendungsplattform intelligente Mobilität Was ist AIM? Wie wirkt AIM? Wie wächst AIM? Institut für Verkehrssystemtechnik PD Dr. Frank Köster 3. Mai 2010 > Folie 1 Was ist? Anwendungsplattform Intelligente
Projektplan(ung) zu CYOUTOO
 zu CYOUTOO") Seite 1 von 8 Projektplan(ung) zu CYOUTOO Inhalt Allgemeines 2 Die Meilensteine 3 Geplante Meilensteine des Projekts 3 Projektziel 1 4 Zielerläuterung 4 Meilensteine zu Projektziel 1. 4 Ergebnis 4 Projektziel
Seite 1 von 8 Projektplan(ung) zu CYOUTOO Inhalt Allgemeines 2 Die Meilensteine 3 Geplante Meilensteine des Projekts 3 Projektziel 1 4 Zielerläuterung 4 Meilensteine zu Projektziel 1. 4 Ergebnis 4 Projektziel
Serious Games Spielen, Lernen, Simulation
 Serious Games Spielen, Lernen, Simulation Forschungslandschaft und Anwendung Anno 1701 Holger Diener Entertainment Technologien Fraunhofer-Institut für Graphische Datenverarbeitung Institutsteil Rostock
Serious Games Spielen, Lernen, Simulation Forschungslandschaft und Anwendung Anno 1701 Holger Diener Entertainment Technologien Fraunhofer-Institut für Graphische Datenverarbeitung Institutsteil Rostock
Seminar im Grundstudium: Motion-Tracking in der Robotik
 Seminar im Grundstudium SS2007 Seminar im Grundstudium: Motion-Tracking in der Robotik Lehrstuhl für Hardware-Software-Co-Design Universität Erlangen-Nürnberg stefan.wildermann@informatik.uni-erlangen.de
Seminar im Grundstudium SS2007 Seminar im Grundstudium: Motion-Tracking in der Robotik Lehrstuhl für Hardware-Software-Co-Design Universität Erlangen-Nürnberg stefan.wildermann@informatik.uni-erlangen.de
Bildverarbeitung in der Qualitätskontrolle. Sebastian Zambal LEADING INNOVATIONS
 Bildverarbeitung in der Qualitätskontrolle Sebastian Zambal LEADING INNOVATIONS Überblick Profactor Grundlagen Bildverarbeitung HW, SW, Methoden Inspektion Gussteilen Inspektion CFK, GFK Projekte EMVA-Studie:
Bildverarbeitung in der Qualitätskontrolle Sebastian Zambal LEADING INNOVATIONS Überblick Profactor Grundlagen Bildverarbeitung HW, SW, Methoden Inspektion Gussteilen Inspektion CFK, GFK Projekte EMVA-Studie:
Einsatz einer Echtzeit-Publish/Subscribe-Kommunikation für die Teleoperation mobiler Roboter
 Einsatz einer Echtzeit-Publish/Subscribe-Kommunikation für die Teleoperation mobiler Roboter, André Herms und Michael Schulze lindhors@st.ovgu.de, {aherms,mschulze}@ovgu.de Fakultät für Informatik Institut
Einsatz einer Echtzeit-Publish/Subscribe-Kommunikation für die Teleoperation mobiler Roboter, André Herms und Michael Schulze lindhors@st.ovgu.de, {aherms,mschulze}@ovgu.de Fakultät für Informatik Institut
Intelligente Transportsysteme
 Intelligente Transportsysteme Universität Ulm Fakultät für Informatik Proseminar Künstliche Intelligenz SS 2004 Michael Arnold Typen intelligenter Transportsysteme Fahrer-Assistenz-Systeme Mensch hat Kontrolle
Intelligente Transportsysteme Universität Ulm Fakultät für Informatik Proseminar Künstliche Intelligenz SS 2004 Michael Arnold Typen intelligenter Transportsysteme Fahrer-Assistenz-Systeme Mensch hat Kontrolle
AP-P1063. Schnellstartanleitung
 AP-P1063 Schnellstartanleitung Inhalt 1. Lieferumfang 2. Installation der Micro SD Karte und SIM Karte 3. Inbetriebnahme der Kamera 4. Wiedergabe über Smartphones 5. Wiedergabe über PC 6. Überprüfung der
AP-P1063 Schnellstartanleitung Inhalt 1. Lieferumfang 2. Installation der Micro SD Karte und SIM Karte 3. Inbetriebnahme der Kamera 4. Wiedergabe über Smartphones 5. Wiedergabe über PC 6. Überprüfung der
Digitale Transformation am Beispiel vernetztes Auto Technische Möglichkeiten
 Digitale Transformation am Beispiel vernetztes Auto Technische Möglichkeiten Volker Gruhn Digitale Transformation Disruption Map: Sprengkraft der digitalen Transformation Quelle: Deloitte Digital/Heads!
Digitale Transformation am Beispiel vernetztes Auto Technische Möglichkeiten Volker Gruhn Digitale Transformation Disruption Map: Sprengkraft der digitalen Transformation Quelle: Deloitte Digital/Heads!
Alexander Kirchbeck Claas Selbstfahrende Erntemaschinen GmbH
 Alexander Kirchbeck Claas Selbstfahrende Erntemaschinen GmbH Alexander Kirchbeck absolvierte von 2003 bis 2006 ein duales Studium in Kooperation mit der Firma Claas zum Diplom Wirtschaftsingenieur (BA).
Alexander Kirchbeck Claas Selbstfahrende Erntemaschinen GmbH Alexander Kirchbeck absolvierte von 2003 bis 2006 ein duales Studium in Kooperation mit der Firma Claas zum Diplom Wirtschaftsingenieur (BA).
Agenda: StatusCheck Präsentation System Demonstration Software Funktions- Überblick
 Condition monitoring Agenda: StatusCheck Präsentation System Demonstration Software Funktions- Überblick 2 Alle Lager fallen aus.. Der trick ist zu wissen wann??? 3 Warum condition monitoring? Maximierung
Condition monitoring Agenda: StatusCheck Präsentation System Demonstration Software Funktions- Überblick 2 Alle Lager fallen aus.. Der trick ist zu wissen wann??? 3 Warum condition monitoring? Maximierung
DARPA Grand Challenge Autonome intelligente Roboter ~Seminar~
 DARPA Grand Challenge Autonome intelligente Roboter ~Seminar~ 21.06.2007 Oualid Hamdi *Inhaltsverzeichnis 1.Einleitung 2.Die Grand Challenge 2.a.Die Route 2.b.Regeln 3.Die Hardware 4.Die Software 5.Zusammenfassung
DARPA Grand Challenge Autonome intelligente Roboter ~Seminar~ 21.06.2007 Oualid Hamdi *Inhaltsverzeichnis 1.Einleitung 2.Die Grand Challenge 2.a.Die Route 2.b.Regeln 3.Die Hardware 4.Die Software 5.Zusammenfassung
Untersuchungen zur flexiblen Steuerung von Service-Robotern
 Prof. Dr.-Ing. Matthias Seitz Institut für Automatisierungssysteme Fachbereich Elektrotechnik Untersuchungen zur flexiblen Steuerung von Service-Robotern 1. Anforderungen an Service-Roboter 2. Vorteile
Prof. Dr.-Ing. Matthias Seitz Institut für Automatisierungssysteme Fachbereich Elektrotechnik Untersuchungen zur flexiblen Steuerung von Service-Robotern 1. Anforderungen an Service-Roboter 2. Vorteile
Kinematische Bestandsdatenerfassung mit Laserscannern
 Kinematische Bestandsdatenerfassung mit Laserscannern 3D MAPPING Das Mobile Straßen Erfassungs- System (MoSES) Aufnahme des Straßen- oder Schienenkorridors mit ca. 40 m Breite Erfassung des Raumes mit
Kinematische Bestandsdatenerfassung mit Laserscannern 3D MAPPING Das Mobile Straßen Erfassungs- System (MoSES) Aufnahme des Straßen- oder Schienenkorridors mit ca. 40 m Breite Erfassung des Raumes mit
Intelligente Produktions- und Logistiknetzwerke
 Intelligente Produktions- und Logistiknetzwerke Die ganzheitliche Optimierung von Produktions- und Liefernetzwerken 1 Was bedeutet intelligent in diesem Zusammenhang? Google liefert zum Stichwort Intelligenz
Intelligente Produktions- und Logistiknetzwerke Die ganzheitliche Optimierung von Produktions- und Liefernetzwerken 1 Was bedeutet intelligent in diesem Zusammenhang? Google liefert zum Stichwort Intelligenz
MyoMetrics - Laborkonzept. Ein integrierter Ansatz zur biomechanischen Analyse menschlicher Bewegungen
 MyoMetrics - Laborkonzept Ein integrierter Ansatz zur biomechanischen Analyse menschlicher Bewegungen Software Module Das myometrics Laborkonzept besteht aus der Basis Software "MR3" mit 4 wählbaren Basis-Modulen,
MyoMetrics - Laborkonzept Ein integrierter Ansatz zur biomechanischen Analyse menschlicher Bewegungen Software Module Das myometrics Laborkonzept besteht aus der Basis Software "MR3" mit 4 wählbaren Basis-Modulen,
Moodle-Kurs - Einführung
 Moodle-Kurs - Einführung In Moodle-Kursen stellen Sie Online-Lerninhalte zur Verfügung. Kursformate THEMEN-Format: Der Kurs kann in 1 bis 52 nummerierte Abschnitte eingeteilt werden, die jeweils mit Arbeitsunterlagen
Moodle-Kurs - Einführung In Moodle-Kursen stellen Sie Online-Lerninhalte zur Verfügung. Kursformate THEMEN-Format: Der Kurs kann in 1 bis 52 nummerierte Abschnitte eingeteilt werden, die jeweils mit Arbeitsunterlagen
Tracking Technologien für Augmented Reality
 Tracking Technologien für Augmented Reality 1 Inhalt Motivation Tracking Methoden Optisch MarkerlessTracking (kleine Wiederholung) Aktiv und Passive Marker Modellbasiertes Markerless Tracking Sensoren
Tracking Technologien für Augmented Reality 1 Inhalt Motivation Tracking Methoden Optisch MarkerlessTracking (kleine Wiederholung) Aktiv und Passive Marker Modellbasiertes Markerless Tracking Sensoren
Multirotor UAVs Anwendungen zur Geodatengewinnung
 Anwendungen zur Geodatengewinnung Inhalt Überblick AscTec Geschichte, Produkte, Technik AscTec Falcon Möglichkeiten und Anwendungen Bisherige Projekte zur Geodatengewinnung Ausblick Folie 2 Ascending Technologies
Anwendungen zur Geodatengewinnung Inhalt Überblick AscTec Geschichte, Produkte, Technik AscTec Falcon Möglichkeiten und Anwendungen Bisherige Projekte zur Geodatengewinnung Ausblick Folie 2 Ascending Technologies
Schwierigkeitsbestimmung von C-Test-Lücken. Lisa Beinborn Assozierte Doktorandin UKP-DIPF UKP Lab, TU Darmstadt 09 July 2013
 Schwierigkeitsbestimmung von C-Test-Lücken Lisa Beinborn Assozierte Doktorandin UKP-DIPF UKP Lab, TU Darmstadt 09 July 2013 Virtualisierung vereinfacht individuelle Förderung Anpassung von Lernmaterialien
Schwierigkeitsbestimmung von C-Test-Lücken Lisa Beinborn Assozierte Doktorandin UKP-DIPF UKP Lab, TU Darmstadt 09 July 2013 Virtualisierung vereinfacht individuelle Förderung Anpassung von Lernmaterialien
Robotik und Automation weltweit auf Erfolgskurs
 Bildquelle: Erhardt + Abt Robotik und Automation weltweit auf Erfolgskurs Patrick Schwarzkopf, Geschäftsführer Robotik + Automation Themen im Überblick Intro: Robotik, IAS und IBV Umsatzrekord 2015 und
Bildquelle: Erhardt + Abt Robotik und Automation weltweit auf Erfolgskurs Patrick Schwarzkopf, Geschäftsführer Robotik + Automation Themen im Überblick Intro: Robotik, IAS und IBV Umsatzrekord 2015 und
Probleme der Navigation von Rehabilitationsroboter: Intelligenter Rollstuhl
 16.04.2013 Advanced Seminar "Computer Engineering" WS2012/2013 Probleme der Navigation von Rehabilitationsroboter: Intelligenter Rollstuhl Sandrine Michele Chouansu Lehrstuhl für Automation; Universität
16.04.2013 Advanced Seminar "Computer Engineering" WS2012/2013 Probleme der Navigation von Rehabilitationsroboter: Intelligenter Rollstuhl Sandrine Michele Chouansu Lehrstuhl für Automation; Universität
INTELLIGENTE ARBEITSSYSTEME ROBOTIK- UND LOGISTIKANWENDUNGEN
 INTELLIGENTE ARBEITSSYSTEME ROBOTIK- UND LOGISTIKANWENDUNGEN Das taktile Internet 1. Fraunhofer als Technologiepartner für Intelligente Arbeitssysteme 2. Situationsanalyse und prognose im Logistikraum
INTELLIGENTE ARBEITSSYSTEME ROBOTIK- UND LOGISTIKANWENDUNGEN Das taktile Internet 1. Fraunhofer als Technologiepartner für Intelligente Arbeitssysteme 2. Situationsanalyse und prognose im Logistikraum
Anwendungen des Matlab-Webservers als Simulationstool für virtuelle Laborumgebungen
 Anwendungen des Matlab-Webservers als Simulationstool für virtuelle Laborumgebungen Michael E. Auer / Andreas Pester Carinthia Tech Institute, University of Applied Sciences Richard-Wagner-Strasse 19,
Anwendungen des Matlab-Webservers als Simulationstool für virtuelle Laborumgebungen Michael E. Auer / Andreas Pester Carinthia Tech Institute, University of Applied Sciences Richard-Wagner-Strasse 19,
TOUCHLESS BIOMETRIC SYSTEMS SWITZERLAND
 TOUCHLESS BIOMETRIC SYSTEMS SWITZERLAND TOUCHLESS FINGERPRINTING 3D TERMINAL Dreidimensionales und berührungsfreies Terminal für höchste Sicherheit und Multifunktionalität am Zutrittspunkt. 3D-Touchless-Technologie
TOUCHLESS BIOMETRIC SYSTEMS SWITZERLAND TOUCHLESS FINGERPRINTING 3D TERMINAL Dreidimensionales und berührungsfreies Terminal für höchste Sicherheit und Multifunktionalität am Zutrittspunkt. 3D-Touchless-Technologie
TOUCHLESS BIOMETRIC SYSTEMS SWITZERLAND
 TOUCHLESS BIOMETRIC SYSTEMS SWITZERLAND TOUCHLESS FINGERPRINTING 3D ENROLL Dreidimensionaler und berührungsfreier Sensor für die Erstregistrierung und die Erstellung von Templates. 3D TERMINAL Dreidimensionales
TOUCHLESS BIOMETRIC SYSTEMS SWITZERLAND TOUCHLESS FINGERPRINTING 3D ENROLL Dreidimensionaler und berührungsfreier Sensor für die Erstregistrierung und die Erstellung von Templates. 3D TERMINAL Dreidimensionales
Visualisierung und 3D Computergraphik auf mobilen Geräten
 Visualisierung und 3D Computergraphik auf mobilen Geräten Daniel Weiskopf Institut für Visualisierung und Interaktive Systeme Übersicht Hintergrund Nexus-Umfeld 3D Graphik auf mobilen Geräten Visualisierungsverfahren
Visualisierung und 3D Computergraphik auf mobilen Geräten Daniel Weiskopf Institut für Visualisierung und Interaktive Systeme Übersicht Hintergrund Nexus-Umfeld 3D Graphik auf mobilen Geräten Visualisierungsverfahren
Industrie 4.0 und cyberphysische Systeme: Kurzlebiger Trend oder Arbeitswelt von morgen?
 Industrie 4.0 und cyberphysische Systeme: Kurzlebiger Trend oder Arbeitswelt von morgen? Fachtagung Sicherheit und Gesundheitsschutz in der Warenlogistik 2015, BGHW, 14. September 2015, Dresden Institut
Industrie 4.0 und cyberphysische Systeme: Kurzlebiger Trend oder Arbeitswelt von morgen? Fachtagung Sicherheit und Gesundheitsschutz in der Warenlogistik 2015, BGHW, 14. September 2015, Dresden Institut
Matrox Imaging White Paper
 Kurzbeschreibung Smartkameras finden in der Welt der industriellen Bildverarbeitung und automatisierten optischen Prüfsysteme viel Beachtung. Sie werden oft als die beste, manchmal sogar als die einzige
Kurzbeschreibung Smartkameras finden in der Welt der industriellen Bildverarbeitung und automatisierten optischen Prüfsysteme viel Beachtung. Sie werden oft als die beste, manchmal sogar als die einzige
Analytisches CRM in der Automobilindustrie
 Analytisches CRM in der Automobilindustrie Dr. Frank Säuberlich Practice Manager European Customer Solutions Urban Science International GmbH Automobilhersteller müssen neue Wege gehen Anforderungen in
Analytisches CRM in der Automobilindustrie Dr. Frank Säuberlich Practice Manager European Customer Solutions Urban Science International GmbH Automobilhersteller müssen neue Wege gehen Anforderungen in
HighTecBot: Ein Roboter-Baukastensystem zur Unterstützung der Informatik-Lehre an Hochschulen. Prof. Dr. Martina Lehser Embedded Robotics Lab
 HighTecBot: Ein Roboter-Baukastensystem zur Unterstützung der Informatik-Lehre an Hochschulen Prof. Dr. Martina Lehser Embedded Robotics Lab Hochschule für f r Technik und Wirtschaft des Saarlandes Technik:
HighTecBot: Ein Roboter-Baukastensystem zur Unterstützung der Informatik-Lehre an Hochschulen Prof. Dr. Martina Lehser Embedded Robotics Lab Hochschule für f r Technik und Wirtschaft des Saarlandes Technik:
Robotics. Flex Finishing Force Control Kraftsteuerung für Roboterbearbeitungsprozesse
 Robotics Flex Finishing Force Control Kraftsteuerung für Roboterbearbeitungsprozesse Force Control (FC) Der traditionelle Weg einen Roboter zu programmieren war, den Pfad, die Verfahrgeschwindigkeit sowie
Robotics Flex Finishing Force Control Kraftsteuerung für Roboterbearbeitungsprozesse Force Control (FC) Der traditionelle Weg einen Roboter zu programmieren war, den Pfad, die Verfahrgeschwindigkeit sowie
SCAN&GO DIE NEUE VERMESSUNGSTECHNOLOGIE. www.scan-go.eu www.shop.laserscanning-europe.com V.02.2014
 SCAN&GO DIE NEUE VERMESSUNGSTECHNOLOGIE V.02.2014 www.scan-go.eu www.shop.laserscanning-europe.com SCAN&GO SYSTEM (PATENTRECHTLICH GESCHÜTZT) DIE NEUE VERMESSUNGSTECHNOLOGIE Scan&Go ist eine neue Methode
SCAN&GO DIE NEUE VERMESSUNGSTECHNOLOGIE V.02.2014 www.scan-go.eu www.shop.laserscanning-europe.com SCAN&GO SYSTEM (PATENTRECHTLICH GESCHÜTZT) DIE NEUE VERMESSUNGSTECHNOLOGIE Scan&Go ist eine neue Methode
AUTONOMES FAHREN TRENDS UND HERAUSFORDERUNGEN IN DER IKT FORSCHUNG
 AUTONOMES FAHREN TRENDS UND HERAUSFORDERUNGEN IN DER IKT FORSCHUNG Prof. Dr. Ing. J. Marius Zöllner FZI Forschungszentrum Informatik am Karlsruher Institut für Technologie FZI FORSCHUNGSZENTRUM INFORMATIK
AUTONOMES FAHREN TRENDS UND HERAUSFORDERUNGEN IN DER IKT FORSCHUNG Prof. Dr. Ing. J. Marius Zöllner FZI Forschungszentrum Informatik am Karlsruher Institut für Technologie FZI FORSCHUNGSZENTRUM INFORMATIK
Virtuelle Inbetriebnahme von Maschinen und Fabriken
 Proseminar Technische Informationssysteme Virtuelle Inbetriebnahme von Maschinen und Fabriken Dresden, den 14.01.2010 Virtuelle Inbetriebnahme von Maschinen und Fabriken 1. serklärung 2. Vorteile und Grenzen
Proseminar Technische Informationssysteme Virtuelle Inbetriebnahme von Maschinen und Fabriken Dresden, den 14.01.2010 Virtuelle Inbetriebnahme von Maschinen und Fabriken 1. serklärung 2. Vorteile und Grenzen
Die Vernetzung menschlicher Gehirne
 Flims, 04.09.2012 Einsatz neuer Medien: Die Vernetzung menschlicher Gehirne Pascal Kaufmann CEO Starmind International AG Verbindung von Gehirn und Maschine visueller Input motorischer Output Forschungsprojekt
Flims, 04.09.2012 Einsatz neuer Medien: Die Vernetzung menschlicher Gehirne Pascal Kaufmann CEO Starmind International AG Verbindung von Gehirn und Maschine visueller Input motorischer Output Forschungsprojekt
KAGIS Fachtagung D-Stadtmodell Klagenfurt
 KAGIS Fachtagung 2008 3D-Stadtmodell Klagenfurt Einsatzzwecke in der Kommunalverwaltung DI Koren Günter Klagenfurt, 4. Juni 2008 Anwendung Wer braucht das 3D Stadtmodell? Stadtplaner und Projektentwickler
KAGIS Fachtagung 2008 3D-Stadtmodell Klagenfurt Einsatzzwecke in der Kommunalverwaltung DI Koren Günter Klagenfurt, 4. Juni 2008 Anwendung Wer braucht das 3D Stadtmodell? Stadtplaner und Projektentwickler
Elektronische Datenerfassung im Feld. Magali Munsch, Ewald Kappes, EAME Data Management Syngenta Crop Protection
 Elektronische Datenerfassung im Feld Magali Munsch, Ewald Kappes, EAME Data Management Syngenta Crop Protection Die drei Geschäftsfelder von Syngenta Crop Protection Seeds Lawn & Garden Spezifische Herbizide
Elektronische Datenerfassung im Feld Magali Munsch, Ewald Kappes, EAME Data Management Syngenta Crop Protection Die drei Geschäftsfelder von Syngenta Crop Protection Seeds Lawn & Garden Spezifische Herbizide
Thema 2: Systemarchitekturen von Sensor-Aktor-Systemen von mobilem Robotern
 Überblick und Systemarchitektur allgemein Thema 1: Aktuelle Trends im Robocup Die Robocup-Initiative hat zum Ziel, Benchmark aktueller Entwicklungen auf dem Gebiet der Künstlichen Intelligenz und der Robotik
Überblick und Systemarchitektur allgemein Thema 1: Aktuelle Trends im Robocup Die Robocup-Initiative hat zum Ziel, Benchmark aktueller Entwicklungen auf dem Gebiet der Künstlichen Intelligenz und der Robotik
Geodaten in Computerspielen. Von Teut Weidemann Vorstand CDV AG
 Geodaten in Computerspielen Von Teut Weidemann Vorstand CDV AG Kurze Vorstellung Wer bin ich Seit über 20 Jahren in der Computerbranche Mehr als 50 veröffentlichte Spiele Alles gemacht was zu machen ist:
Geodaten in Computerspielen Von Teut Weidemann Vorstand CDV AG Kurze Vorstellung Wer bin ich Seit über 20 Jahren in der Computerbranche Mehr als 50 veröffentlichte Spiele Alles gemacht was zu machen ist:
Studieneingangsphase für internationale Studierende online Coaching mit Open DC
 Karoline v. Köckritz Center für Digitale Systeme (CeDiS), Freie Universität Berlin Studieneingangsphase für internationale Studierende online Coaching mit Open DC ida-seminar, 08.05.2015 Karoline v. Köckritz
Karoline v. Köckritz Center für Digitale Systeme (CeDiS), Freie Universität Berlin Studieneingangsphase für internationale Studierende online Coaching mit Open DC ida-seminar, 08.05.2015 Karoline v. Köckritz
Prozessbeobachtung und visuelle Kontrollsysteme. lumiglas. Paketlösung für die Biogas-Erzeugung
 Prozessbeobachtung und visuelle Kontrollsysteme Paketlösung für die Biogas-Erzeugung Fernüberwachung mit Ex-Kameras und allen Komponenten für Hersteller und Betreiber von Biogas-Anlagen Prozessbeobachtung
Prozessbeobachtung und visuelle Kontrollsysteme Paketlösung für die Biogas-Erzeugung Fernüberwachung mit Ex-Kameras und allen Komponenten für Hersteller und Betreiber von Biogas-Anlagen Prozessbeobachtung
Industrie 4.0 und Smart Data
 Industrie 4.0 und Smart Data Herausforderungen für die IT-Infrastruktur bei der Auswertung großer heterogener Datenmengen Richard Göbel Inhalt Industrie 4.0 - Was ist das? Was ist neu? Herausforderungen
Industrie 4.0 und Smart Data Herausforderungen für die IT-Infrastruktur bei der Auswertung großer heterogener Datenmengen Richard Göbel Inhalt Industrie 4.0 - Was ist das? Was ist neu? Herausforderungen
ClickShare. Das One-Click-Wonder
 ClickShare Das One-Click-Wonder Drei Schritte zu effizienteren Meetings ClickShare ist die Antwort von Barco auf eines der dringlichsten Probleme in Besprechungsräumen, das weltweit Millionen von Besprechungsteilnehmern
ClickShare Das One-Click-Wonder Drei Schritte zu effizienteren Meetings ClickShare ist die Antwort von Barco auf eines der dringlichsten Probleme in Besprechungsräumen, das weltweit Millionen von Besprechungsteilnehmern
Exploring subsurface GIS data with Handheld Outdoor Augmented Reality
 Exploring subsurface GIS data with Handheld Outdoor Augmented Reality Gerhard Schall Institut für Maschinelles Sehen und Darstellen Technische Universität Graz 1 Agenda Outdoor Augmented Reality Evolution
Exploring subsurface GIS data with Handheld Outdoor Augmented Reality Gerhard Schall Institut für Maschinelles Sehen und Darstellen Technische Universität Graz 1 Agenda Outdoor Augmented Reality Evolution
GIS DAY GEOPORTAL die innovative GIS-Lösung für Gemeinden. Geodateninfrastrukturen für Schweizer Gemeinden
 GIS DAY 2012 GEOPORTAL die innovative GIS-Lösung für Gemeinden Übersicht Begrüssung, Einleitung Oliver Brem Überblick GIS Produkte Rolf Eugster Praxisbeispiel Andreas Brühwiler Betrachter, Anwender Dominik
GIS DAY 2012 GEOPORTAL die innovative GIS-Lösung für Gemeinden Übersicht Begrüssung, Einleitung Oliver Brem Überblick GIS Produkte Rolf Eugster Praxisbeispiel Andreas Brühwiler Betrachter, Anwender Dominik
Kognitives Onboard Capability-Management im Flugversuch
 Kognitives Onboard Capability-Management im Flugversuch Sebastian Clauß, Florian Böhm, Stefan Brüggenwirth, Prof. Dr.-Ing. Axel Schulte Institut für Flugsysteme LRT 13 Universität der Bundeswehr München
Kognitives Onboard Capability-Management im Flugversuch Sebastian Clauß, Florian Böhm, Stefan Brüggenwirth, Prof. Dr.-Ing. Axel Schulte Institut für Flugsysteme LRT 13 Universität der Bundeswehr München
Was sind Sensoren? Sensoren sind (elektronische) Bauteile zur qualitativen oder quantitativen Messungbestimmter Größen und Eigenschaften.
 Bauteile zur qualitativen oder quantitativen Messungbestimmter Größen und Eigenschaften.") Sensoren Was sind Sensoren? Sensoren sind (elektronische) Bauteile zur qualitativen oder quantitativen Messungbestimmter Größen und Eigenschaften. Was messen Sensoren? Wärmestrahlung Temperatur Feuchtigkeit
Sensoren Was sind Sensoren? Sensoren sind (elektronische) Bauteile zur qualitativen oder quantitativen Messungbestimmter Größen und Eigenschaften. Was messen Sensoren? Wärmestrahlung Temperatur Feuchtigkeit
Smart Grid Components. FAST Stromauge. Der smarte Clip-On Meter Reader für alle Sparten
 Smart Grid Components FAST Stromauge Der smarte Clip-On Meter Reader für alle Sparten FAST Stromauge Clip-On Meter Reader zum smarten Fernauslesen mechanischer Zähler FAST Stromauge - nicht größer als
Smart Grid Components FAST Stromauge Der smarte Clip-On Meter Reader für alle Sparten FAST Stromauge Clip-On Meter Reader zum smarten Fernauslesen mechanischer Zähler FAST Stromauge - nicht größer als
Projektarbeit. Messplatzautomatisierung 7. Semester. Autonomes Fahrzeug
 Projektarbeit Messplatzautomatisierung 7. Semester Autonomes Fahrzeug Das Projekt wurde im Zeitraum des 7. Semesters und im Rahmen der Vorlesung Messplatzautomatisierung durchgeführt. Das Projektteam setzte
Projektarbeit Messplatzautomatisierung 7. Semester Autonomes Fahrzeug Das Projekt wurde im Zeitraum des 7. Semesters und im Rahmen der Vorlesung Messplatzautomatisierung durchgeführt. Das Projektteam setzte
Einmalige Robotershow Robots on Tour
 Einmalige Robotershow Robots on Tour Zum 25-Jahre-Jubiläum und Weltkongress Robots on Tour des Labors für Künstliche Intelligenz der Universität Zürich (AI Lab) kommen am 9. März 2013 Interessierte, Robotikfans
Einmalige Robotershow Robots on Tour Zum 25-Jahre-Jubiläum und Weltkongress Robots on Tour des Labors für Künstliche Intelligenz der Universität Zürich (AI Lab) kommen am 9. März 2013 Interessierte, Robotikfans