Gruppentheorie mit Anwendungen in Chemie und Molekülphysik
|
|
|
- Karlheinz Berg
- vor 7 Jahren
- Abrufe
Transkript
1 Gruppentheorie mit Anwendungen in Chemie und Molekülphysik Philipp Gütlich Institut für Anorganische Chemie und Analytische Chemie Universität Mainz
2 Allgemeine Bemerkungen Gruppentheorie in Chemie und Molekülphysik a) Symmetrie von Molekülen (isoliert); b) Anwendung gruppentheoretischer Hilfsmittel bei quantenchemischen Rechnungen und Interpretation von UVund Schingungsspektren Symmetrie : Ein Molekül besitzt Symmetrie, wenn es mindestens zwei nichtunterscheidbare Orientierungen im Raum gibt. Beispiel: H 2 O-Molekül z z H' O H'' Drehung um 180 um z-achse H'' Nicht unterscheidbare äquivalente Orientierungen (nicht identische Orientierungen!) O H'
3 Drehung um 180 = Symmetrieoperation z-achse = Symmetrieelement Σalle möglichen Symmetrieoperationen eines betrachteten Moleküls Gruppe im mathematischen Sinne Warum Beschäftigung mit Symmetrielehre (Gruppentheorie) in der Chemie und Molekülphysik? Aussage über Anzahl der energetisch verschiedenen Molekülzustände; Verbotene und erlaubte Übergänge (z.b. elektrische Dipol (El)-Übergänge); Deutung von UV/vis-Spektren (Farbe); Deutung magnetischer Eigenschaften; Deutung von Schwingungsspektren; Chemische Bindung: Linearkombination von Atomorbitalen (LCAO) geeigneter Symmetrie zu Molekülorbitalen.
4 Mit Hilfe der Gruppentheorie kann beantwortet werden, ob Molekülzustände gleiche Energie haben oder nicht; eine quantitative Aussage über die relativen Energielagen ist aber nur mit Hilfe einer Rechnung (Störungsrechnung) möglich. Allein die Kenntnis der Symmetrie von Komplexionen genügt, um zahlreiche physikalische Eigenschaften dieser Verbindungen qualitativ verstehen zu können.
5 2. Definitionen und Theoreme 2.1 Eigenschaften einer Gruppe Eine Menge von Gruppenelementen (z.b. Symmetrieoperationen, nicht Symmetrieelementen!) bildet eine Gruppe, wenn folgende Bedingungen erfüllt sind: I. Das Produkt (einer Verknüpfung) ( Multiplikation ) zweier Elemente einer Gruppe muss ein Element der Gruppe sein: Im allgemeinen sind die Verknüpfungen nicht kommutativ AB BA Aber: Falls AB = BA Abelsche Gruppen II. Die Menge enthält das Einheitselement E, das die Beziehung erfüllt: EX = XE = X wobei X jedes Element der Gruppe sein kann.
6 III. Für alle Elemente der Menge gilt das assoziative Gesetz: A(BC) = (AB)C Allgemein: (AB)(CD)(EF) = A(BC)(DE)(FG) = = (AB)C(DE)(FG) IV. Zu jedem Element P der Menge existiert ein reziprokes Element Q, das ebenfalls ein Element der Gruppe ist. Falls PQ = E, dann ist Q = P -1 das zu P reziproke Element. Theorem: Das Reziproke eines Produkts von zwei oder mehr Elementen einer Gruppe ist gleich dem Produkt der reziproken Elemente in umgekehrter Reihenfolge: (ABC XY) -1 = Y -1 X -1 C -1 B -1 A -1 Beweis (für ternäres Produkt): ABC = D, D gehört zur Gruppe
7 Multiplikation von rechts mit C -1 B -1 A -1 : ABCC -1 B -1 A -1 = DC -1 B -1 A -1 E ABEB -1 A -1 = DC -1 B -1 A E = DC -1 B -1 A -1 D -1 Somit D -1 = (ABC) -1 = C -1 B -1 A -1 (q.e.d.) Ordnung (h) der Gruppe: = Anzahl der Elemente, die eine Gruppe bilden.
8 2.2 Beispiele für Gruppen; Multiplikationstafel a) Natürliche Zahlenreihe (positive und negative ganze Zahlen und Null): -3, -2, -1, 0, 1, 2, 3 Gruppeneigenschaften: Ordnung: h = Verknüpfung: z. B. für Addition Ergebnis ist immer Element der Gruppe Kommutativität: Ja Abelsche Gruppe, denn = Einheitselement: 0 ; 0 + n = n + 0 = n Assoziatives Gesetz: gültig, denn (3 + 4) + (-2) = 3 + [4 + (-2)] Reziprokes Element zu n: - n, denn (+n) + (-n) = 0 b) Gruppe der Ordnung h =1: enthält nur 1 Element: E
9 c) Gruppe der Ordnung h = 2: G 2 : E, A Multiplikationstafel linker Faktor (zweite Operation) G 2 E A E E A A A E rechter Faktor (erste Operation) (Binäre Operationen) z.b. EA = A AA = E (A = A -1 ) Theorem: Jede Zeile und jede Spalte enthält jedes Gruppenelement nur einmal. Identität zwischen Zeilen oder Spalten ist ausgeschlossen ( Rearrangement-Theorem )
10 d) Gruppe der Ordnung h = 3 G 3 : E, A, B Multiplikationstafel: G 3 E A B E E A B A B A B? Ausfüllen der Tafel soweit kein Problem! Zur Vervollständigung: Annahme : AA = E, somit auch AB = B G 3 E A B E E A B A A E B B B B E Wiederholung von B in Spalte 3 und Zeile 3 nicht möglich
11 Aber Annahme : AA = B führt automatisch zur richtigen Tafel G 3 E A B E E A B A A B E B B E A e) Zyklische Gruppen G 3 ist die einfachste nicht triviale zyklische Gruppe. Denn: AA = B (=A 2 ) AB = AAA = E (=A 3 ) Also: Alle Gruppenelemente (E, A, B) können durch Potenzen von A erzeugt werden. Zyklische Gruppe allgemein: X, X 2,, X h = E (Element E) h = Ordnung der Gruppe Für zyklische Gruppen gilt Kommunitativität (Abelsche Gruppen)
12 Beispiel: Zyklische Gruppe der Ordnung h = 4 X = A, X 2 = B, X 3 = C, X 4 (= AAAA) = E G (1) 4 E A B C E E A B C A A B C E B B C E A C C E A B AB = A(AA) = C BA = (AA)A = C (Abel!) BB = (AA)(AA) = A 4 = E CA = (AAA)A = A 4 = E CB = A 3 A 2 = EA = A
13 Zu G 4 (1) ist nur Element B sein eigenes Reziprokes: BB = E. Mit der Annahme, daß auch AA = E folgt CC = E und damit folgende zweite Tafel für eine Gruppe mit h = 4: G (2) 4 E A B C E E A B C A A E C B B B C E A C C B A E Ausfüllen der restlichen Plätze unter Beachtung des obigen Theorems ( Rearrangement-Theorem )
14 f) Symmetriegruppe für gleichseitiges Dreieck (z.b. BF 3 -Molekül) σ 1 1 Symmetrieelemente: 3 Spiegelebenen σ 1, σ 2, σ 3, 1 C 3 -Achse (= Schnittlinie der 3 Spiegelebenen) Diese Symmetrieelemente induzieren die Symmetrieoperationen (Deckoperationen): 3 2 ˆ ˆ ˆ 2 E, σ ˆ, σ ˆ, σ ˆ, C, C : Bilden die Gruppe C 3v Identitätsoperation Spiegelungen Drehungen um 120 bzw. 240 Die Symmetrie eines Gebildes ist durch die Gesamtheit seiner möglichen Symmetrieoperationen festgelegt.
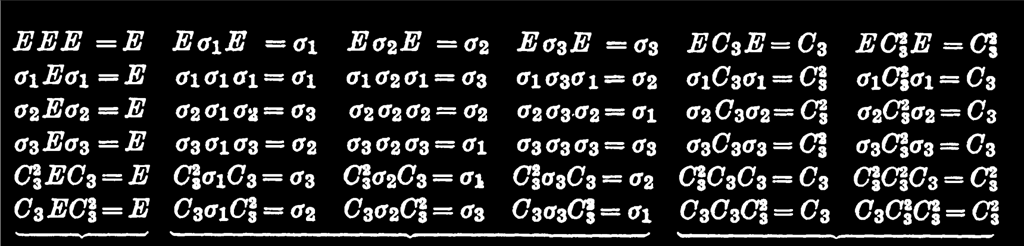
15 linker Faktor (2. Operation) Multiplikationstafel (Übungsaufgabe!) rechter Faktor (1. Operation) C 3v E σ 1 σ 2 σ 3 C 3 C 3 2 E E σ 1 σ 2 σ 3 C 3 C 3 2 σ 1 σ 1 E C 3 C 3 2 σ 2 σ 3 σ 2 σ 2 C 3 2 E C 3 σ 3 σ 1 σ 3 σ 3 C 3 C 2 3 E σ 1 σ 2 C 3 C 3 σ 3 σ 1 σ 2 C 2 3 E C 3 2 C 3 2 σ 2 σ 3 σ 1 E C 3
16 Beispiel: 1 ˆ ˆ ˆ ˆ 2 σ 2 E, σ 3 σ, σ, σ, C, C ˆ 3 ˆ 3 E, ˆ σ ˆ, σ ˆ, σ ˆ, C ˆ, Cˆ N σ 1 Ĉ nach rechts 3
17 1 1 E, ˆ σ ˆ, σ ˆ, σ ˆ, C ˆ, Cˆ E, ˆ σ ˆ, σ ˆ, σ ˆ, C ˆ, Cˆ Ĉ nach rechts 3 Also: ˆ ˆ 2 σˆ σ ˆ = C, σˆ σ ˆ = C nicht kommutativ Merke: Symmetrieelemente werden in Ausgangsorientierung festgelegt und bleiben liegen; nur die Eckpunkte des Dreiecks wandern unter den Symmetrieoperationen.
18 2.3 Untergruppen Eine Untergruppe (zur Hauptgruppe) liegt dann vor, wenn ein Teil der Elemente einer (Haupt)gruppe für sich genommen bereits alle Eigenschaften einer Gruppe (s. Abschn. 2.1) besitzt. Eine Gruppe kann mehrere Untergruppen besitzen, wobei die Ordnung g i der Untergruppe i ein Teiler der Ordnung h der (Haupt)gruppe ist. Beispiel: Gleichseitiges Dreieck (C 3v ) Die Gruppe C 3v besitzt folgende 4 Untergruppen: E, σ 1 ; E, σ 2 ; E, σ 3 ; E, C 3, C 3 2 mit den zugehörigen Multiplikationstafeln
19 Untergruppen der Symmetriegruppe C 3v E, σ 1 : E, σ 2 : E, σ 3 : E, C 3, C 32 : E σ 1 E σ 2 E σ 3 E С 3 С 3 2 E E σ 1 E E σ 2 E E σ 3 E E С 3 С 3 2 σ 1 σ 1 E σ 2 σ 2 E σ 3 σ 3 E С 3 С 3 С 32 E С 32 С 32 E С 3
 ist. Eine Gruppe besitz meist mehrere Klassen; ein Element kann nur einer Klasse angehören. E bildet für sich eine Klasse.")
20 2.4 Klassen Zwei Elemente Q und R einer Gruppe gehören zur gleichen Klasse, wenn sie die Beziehung erfüllen: P -1 QP = R Ähnlichkeits- Transformation wobei P ein Element der Gruppe und P -1 sein Inverses (Reziprokes) ist. Eine Gruppe besitz meist mehrere Klassen; ein Element kann nur einer Klasse angehören. E bildet für sich eine Klasse. Man sagt: R geht durch Ähnlichkeitstransformation aus Q hervor; R und Q sind einander konjugiert. Beispiel: Gruppe C 3v (gleichseitiges Dreieck)
21
22 z.b. σ 1 C 32 σ 1 = σ 1 σ 2 = C 3 σ 2 Also: Die Drehungen C 3 und C 32 sind einander konjugiert und bilden eine Klasse. Die Spiegelungen σ 1, σ 2, σ 3 sind einander konjugiert und bilden eine Klasse. E ist mit sich selbst konjugiert und bildet für sich eine Klasse. Somit: C 3v -Gruppe: 3 Klassen E; σ 1, σ 2, σ 3 ; C 3, C 3 2
23 3. Molekülsymmetrie und Symmetriegruppen 3.1 Symmetrieelemente und Symmetrieoperationen 4 Arten von Symmetrieelementen sind erforderlich zur Beschreibung der Molekülsymmetrie Symmetrieebenen (σ) Symmetriezentrum (i) Drehachsen (C n, n = Zähligkeit der Drehachse) Drehspiegelungsachsen (S n, n = Zähligkeit der Drehachse) Symmetrieoperationen Identische Operation, belässt Molekül in ursprünglicher Lage; Ê Ĉ n 2π Drehung um Winkel um Drehachse C n ; n Drehachse mit größtmöglicher Zähligkeit n = Hauptsymmetrieachse: C n max
24 Beispiel: C 3 = 3-zählige Drehachse, erzeugt die Operationen Ĉ3 : Drehung um 2 Ĉ Ĉ Ĉ Cˆ 3 3 Eˆ 2 n : Drehung um 120 Allgemein: Eine C n -Achse erzeugt n Operationen: n ˆ ˆ 2 ˆ n C,C,...,C =E n n n ˆ n+i ˆ i (C =C!) n n ˆσ: Spiegelung an einer Symmetrieebene 3 Fälle:
25 3 Fälle: σ h : Symmetrieebene C n max σ v : Symmetrieebene enthält C n max σ d : Symmetrieebene enthält C n max und halbiert den Winkel zwischen zwei C 2 -Achsen C n max Es gilt: n ˆσ = Ê für n gerade = für n ungerade ˆσ Ŝ n : Drehspiegelung 2π = Drehung um Winkel um eine Achse, anschließend n Spiegelung an Ebene S n (Reihenfolge der Ausführung unbedeutend)
26 Beispiel: Reguläres Tetraeder 4 3 Ĉ Ŝ ˆσ( S ) 4 3 ˆ ˆ Also: ˆσC S 4 4
27 Merke: Im regulären Tetraeder sind die drei C 2 -Achsen gleichzeitig S 4 -Achsen! C 2 = S 4 A C 2 = S 4 C 2 = S 4 S n -Achse mit n = gerade erzeugt n Operationen S ˆ, S ˆ,..., Sˆ 2 n n n n
28 P 1 ˆ n ˆ ˆ ˆ n n n S =C, σ, C,σ ˆ... n mal Mit n = gerade da ˆ n C =Eˆ n damit folgt Ebenso ist C 3 6 σ( S 6 ) P P' P" ˆ 3 S = iˆ 6 P' n ˆσ = E n n n ˆ ˆn S =Cˆ ˆ n S =Eˆ n n ˆm S =Cˆ 4 m n für m gerade Beispiel: n = 6 erzeugt den Satz Sˆ σc ˆ ˆ 6 6 ˆ ˆ ˆ ˆ S σ C C ˆ ˆ ˆ ˆ ˆ S σ C σc i Allg.: S ˆ = C ˆ = Cˆ S ˆ = σc ˆ ˆ ˆ6 ˆ 6 ˆ 6 6 S = C = E Eine S n -Achse mit n = gerade erfordert die Existenz einer C n/2 -Achse
29 S n -Achse mit n/ungerade erzeugt 2n Operationen Beispiel n = 5: Sˆ σc ˆ ˆ ( Cˆ σ) ˆ Sˆ σˆ Cˆ Cˆ Sˆ Sˆ ˆ5 ˆ 5 S σc ˆ σˆ 5 5 ˆ 6 6 ˆ ˆ S C C Sˆ Sˆ Sˆ σc ˆ ˆ Cˆ σc ˆ ˆ Cˆ σc ˆ ˆ ˆ10 ˆ 5 S C E ˆ11 ˆ ˆ ˆ S σc S d.h. beide existieren unabhängig voreinander (nicht der Fall bei n = gerade) Wiederholung der Sequenz
30 Inversion î : Punktspiegelung an Inversion-Zentrum i ˆi ˆi n m E ˆ n gerade ˆi m ungerade Kommutierende Symmetrieoperationen Folgende Paare von Symmetrieoperationen kommutieren immer: 1. Zwei Drehungen um dieselbe Achse 2. Spiegelungen an zwei Ebenen 3. Inversion und eine beliebige Spiegelung oder Drehung 4. Zwei Ĉ 2 -Drehungen um zwei C 2 -Achsen 5. Drehung und Spiegelung an Ebene zur Drehachse.
31 Zu 1: P Ĉ 4 P' P'' 2 Ĉ 4 Cˆ C ˆ = Cˆ C ˆ = Cˆ Zu 2: P σ 2 P''' σ 1 σ 1 P' P" σˆ σ ˆ = σˆ σˆ
32 Zu 3: P P'' σi ˆˆ= ˆiσ ˆ P''' P' Zu 4: P С 2 ' P' С 2 '' '' ' ' '' C C = C C = iˆ P''' P''
33 Zu 5: P A P' σc ˆˆ = Cˆ σ ˆ = ˆi n n P'' P E
34 3.2 Symmetriegruppen (Punktgruppen) Unterscheidung: Punktgruppe: Raumgruppe: Nomenklatur: Punktgruppe Raumgruppe Alle Symmetrieelemente eines Molekül schneiden sich in einem gemeinsamen Punkt, der durch keine Symmetrieoperationen verlagert wird. enthalten Symmetrieoperationen, die Translation bewirken. von A. M. Schönflies (C n, D n, C nh, )
35 3.2.1 Die Kugeldrehspiegelungsgruppe, R 3i = Symmetriegruppe einer Kugel, hat viele C n -Achsen (durch Mittelpunkt) viele S n -Achsen (durch Mittelpunkt) viele Spiegelebenen (durch Mittelpunkt) Inversionszentrum i Demnach: Ordnung h = Die in der LFT auftretenden Symmetriegruppen sind Untergruppen von R 3i
36 3.2.2 Reguläre Polyeder Es gibt insgesamt 5 reguläre Polyeder (= Platonische Körper) Tetraeder: 4 gleichseitige Dreiecke, 4 Ecken, 6 Kanten Würfel: 6 Quadrate, 8 Ecken, 12 Kanten Oktaeder: 8 gleichseitige Dreiecke, 6 Ecken, 12 Kanten Dodekaeder: 12 gleichseitige Fünfecke, 12 Ecken, 30 Kanten Ikosaeder: 20 gleichseitige Dreiecke, 12 Ecken, 30 Kanten

37
38 Aufbau: n gleichseitige Flächen müssen gemeinsamen Eckpunkt besitzen und nichtplanares (pyramidales) Gebilde aufbauen. Beispiele: 3 gleichs. Dreiecke mit gemeins. Eckpunkt Tetraeder 4 Oktaeder 5 Ikosaeder 3 Quadrate mit gemeinsam Eckpunkt Würfel 3 gleichseitige 5-Ecke mit gemeinsame Eckpunkt Dodekaeder Keine weiteren Möglichkeiten!
![3.2.3 Die wichtigsten Symmetriegruppen von Komplexionen a) [MA 6 ]-Komplex, reguläres Oktaeder Punktgruppe: O h A Symmetrieelemente: A A M A z y x A x = y = z AMA = 90 A 3(C 4 + σ) + 6](/docs-images/49/25093138/images/39-0.png "(C 2 + σ) + 4S 6 + i ( ) bedeutet: C 2 σ C 3 S 6 Mit Symbolen aus Kristallographie: 3( + SE) + 6( + SE) + 4 + Z Symmetrieoperationen: Ê; 8C ˆ ; 3C ˆ ; 6C' ˆ ; 6C ˆ : Reine Drehungen 3 2")
39 3.2.3 Die wichtigsten Symmetriegruppen von Komplexionen a) [MA 6 ]-Komplex, reguläres Oktaeder Punktgruppe: O h A Symmetrieelemente: A A M A z y x A x = y = z AMA = 90 A 3(C 4 + σ) + 6 (C 2 + σ) + 4S 6 + i ( ) bedeutet: C 2 σ C 3 S 6 Mit Symbolen aus Kristallographie: 3( + SE) + 6( + SE) Z Symmetrieoperationen: Ê; 8C ˆ ; 3C ˆ ; 6C' ˆ ; 6C ˆ : Reine Drehungen
40 Da ein Inversionszentrum vorhanden ist, kommen hinzu: ˆiE ˆ = ˆi; 8iC ˆˆ ; 3iC ˆˆ ; 6iC' ˆˆ ; 6iC ˆˆ : h = Beispiele: [Ti(H 2 O) 6 ] 3+ (Jahn-Teller-aktiv), [Cr(NH 3 ) 6 ] 3+, [CoF 6 ] 3, [Fe(CN) 6 ] 3 b) Komplexionen der Symmetriegruppe D 4h Dazu gehören 4 Fälle:
41 A A A M A A A A A M z A A y A A B M A A A A M A A A A x B [MA 6 ] Oktaeder gestreckt z.b. Jahn-Teller- Verzerrung von O h x = y z [MA 6 ] Oktaeder gestaucht [MA 4 B 2 ] trans z.b. [Co(NH 3 ) 4 Cl 2 ] + trans [MA 4 ] quadrat. planar z.b. [PdCl 4 ] 2+ [Ni(CN) 4 ] 2 AMA = 90
42 Symmetrieelemente für D 4h 1(C 4 + σ) + 2(C 2 + σ) + 2(C 2 ' + σ) + i Symmetrieoperationen Ê; 2C ˆ ; 1C ˆ ; 2C' ˆ ; 2C'' ˆ : Reine Drehungen um z-achse um x(y)-achse Winkelhalbierende zwischen x-, y-achse Da i vorhanden ist, kommen hinzu: ˆiE ˆ = ˆi; 2iC ˆˆ = 2S ˆ ; ˆiC ˆ = σ ˆ ; 2iC' ˆˆ = 2σ ˆ ; 2iC'' ˆˆ = 2σˆ h 2 v 2 d Ingesamt 16 Symmetrieoperationen h = 16 für D 4h -Gruppe
43 Merke: Übergang vom regulären Oktaeder (O h ) zum gestreckten (gestauchten) Oktaeder (D 4h ) = Symmetrieerniedrigung (Symmetrieoperationen gehen verloren!) c) Komplexionen der Symmetriegruppe C 4v Zwei Fälle mit KZ 6 1. [MA 6 ]-Komplex, ungleich gestrecktes bzw. gestauchtes Oktaeder A A A M A A A
44 2. [MA 5 B]-Komplex gegenüber D 4h weitere Symmetrieerniedrigung (weitere Symmetrieoperationen gehen verloren) Symmetrieelemente: 1C 4 + 2σ v + 2σ d A A A M B z A A x y Symmetrieoperationen: E; ˆ 2C ˆ (um z); C ˆ (z); 2σ ˆ (xz, yz); 2σ ˆ ( z, WH(x,y)) 4 2 v d ˆ ˆ 3 (C, C C ) h = 8
45 Die Gruppe C 4v ist Untergruppe von R 3i, O h und D 4h Beispiele: [Cr(NH 3 ) 5 Cl] 2+, [Cu(NH 3 ) 5 H 2 O] 2+, [Cu(CN) 5 NO] 2 d) Komplexionen der Symmetriegruppe C 2v Zwei Fälle 1. cis-[ma 4 B 2 ] z.b. cis-[co(nh 3 ) 4 Cl 2 ] + 2. trans-[ma 3 B 3 ] z.b. trans-[co(nh 3 ) 3 (H 2 O) 3 ] 3+ gegenüber C 4v weitere Symmetrie- B x Erniedrigung (gehen weitere Symmetrieoperationen verloren) A A A A A M A B M z B z B B x B y y
46 h = 4 Symmetrieelemente: 1C 2 + 1σ v + 1σ v ' Symmetrieoperationen: cis-[ma 4 B 2 ]: trans-[ma 3 B 3 ]: Ê; Ĉ (um Winkelhalb. zw. x- und y-achse C '' in D ) 2 2 4h σ ˆ (xy; σ ˆ in D ) v h 4h σ ˆ ' (σ z, C σ ˆ in D ) Ê; v 2 d 4h Ĉ (um: x-achse, C ' in D ) 2 2 4h σ ˆ (xy; σ ˆ in D ) v h 4h σ ˆ ' (xz; σ ˆ in D ) v v 4h
 Komplexionen (KZ 6) der Symmetriegruppe D 3 [M(AA) 3 ] z.b.")
47 Alle Operationen in C 2v (für beide Fälle) kommen auch in D 4h vor, somit: C 2v ist Untergruppe von D 4h, somit auch Untergruppe von O h und R 3i. e) Komplexionen (KZ 6) der Symmetriegruppe D 3 [M(AA) 3 ] z.b. [Cr(ox) 3 ] 3- [Cr(en) 3 ] 3+ C 2 A C 2 A A M A A A x C 2 C 3 y Symmetrieelemente: 1C 3 + 3C 2 (polare 2-zählige Drehachsen) Ê; 2C ˆ ; 3C ˆ h = 6 Symmetrieoperationen: 3 2
48 Die in D 3 enthaltenen Operationen kommen auch in O h vor. Somit: D 3 ist Untergruppe von O h, somit auch von R 3i. f) Komplexionen (KZ 6) der Symmetriegruppe C 3v cis-[ma 3 B 3 ] A C 3 B B M A A B Symmetrieelemente: 1C 3 (polar) + 3σ Symmetrieoperationen E; ˆ 2C ˆ ; 3σ ˆ h = 6 3 v
49 g) Reguläres Tetraeder, T d [MA 4 ]-Komplexe z.b. [CoCl 4 ] 2- [Cu(CN) 4 ] 2- [CuCl 4 ] 2- A C 2 z A M y, C 2 A Symmetrieelemente: 3S 4 + 6σ + 4C 3 Symmetrieoperationen: x, C 2 A Ê; 8C ˆ ; 3C ˆ (x,y,z); 6S ˆ = 6(σ C (x,y,z)); 6σ = 6iC ˆˆ ' h 4 d 2 h = 24 (Verbindungslinie zweier gegenüber liegender Würfelkantenmitten) T d ist Untergruppe von O h, und damit auch von R 3i. Unterschied zwischen O h und T d : T d hat kein Inversionszentrum.
 Übungsbeispiele: a) H 2 O C 2v b) NH 3 C 3v c) H 2 O 2 i) Nichtplanare Konfiguration (0 < θ < 90): C 2 ii) cis-planare Konfiguration (θ = 0): C 2v iii) trans-planare Konfiguration (θ =")
50 3.2.4 Schema zur Ermittlung der Symmetriegruppe (Punktgruppe) von Molekülen (J. Chem. Educ. 43, 19,1966) Übungsbeispiele: a) H 2 O C 2v b) NH 3 C 3v c) H 2 O 2 i) Nichtplanare Konfiguration (0 < θ < 90): C 2 ii) cis-planare Konfiguration (θ = 0): C 2v iii) trans-planare Konfiguration (θ = 90): C 2h d) Benzol D 6h e) PF 5 (trigonal-bipyramidal) D 3h f) Ferrocen i) staggered D 5d ii) eclipsed D 5h g) Regenschirm (8 Ecken) staggered eclipsed
51
52 4. Darstellungen von Gruppen 4.1 Matrixschreibweise für geometrische Transformationen Die 5 Typen von Symmetrieoperationen E; ˆ σ, ˆ ˆi, C ˆ, Sˆ n n x lassen sich in Matrixschreibweise ausdrücken. Beispiel: Punkt P(x,y,z) im kartensischen Koordinatensystem z P(x,y,z) y Identitätsoperation: Ê P(x,y,z) = P(x,y,z) x 0 y 1 z x y; z Ê = Einheitsmatrix = Transformationsmatrix Matrizen-Multiplikation!
53 Spiegelungen: : xy σˆ ; z y x z y x 1 σˆ χ xy σˆ = Transformationsmatrix : xz σˆ ; z y x z y x 1 σˆ χ xz σˆ : yz σˆ ; z y x z y x 1 σˆ χ yz σˆ D.h.: Vorzeichenwechsel für die Koordinate σ
54 Inversion: ; z y x z y x î Drehungen: z.b. um z-achse: z-koordinate bleibt unverändert d.h. (C β ) vom Typ Zur Auffindung der übrigen Matrixelemente in der xy-ebene:
55 y' y r ' b j x' r (x',y',z') (x,y,z) x x Mit Additionstheoremen x r cosj y r sinj x' r cos( j β) y' r sin( j β) cos ( j β) cosj cosβ sin j sinβ sin ( j β) sin j cosβ cosj sinβ
56 Erhält man: x' r cosj cosβ r sin j sinβ x y xcosβ y sinβ y' r sin j cosβ r cosj sinβ y x xsinβ y cosβ z' z bzw. in Matrixschreibweise für eine Drehung des Vektors um r den Winkel β um die z-achse:
57 cosβ -sinβ 0 x x' Ĉ r(x,y,z) sinβ cosβ 0 y y' r '( x', y ', z ') β z z' β Ĉ mit χ( Ĉ β ) 2cosβ 1 Transformationsmatrix für Drehung um den Winkel β um die z-achse (im Gegenzeigersinn) Da cosβ = cos( β) und sinβ = sin( β) gilt für entsprechende Drehung im Uhrzeitsinn: cosβ sinβ 0 (C ˆ ) -sinβ cosβ 0 -β 0 0 1
58 Drehspiegelung: um z-achse: S ˆ = σc ˆ ˆ n n Bewirkt Vorzeichenwechsel von z zusätzlich zu -Wirkung Ĉ n cosβ sinβ 0 (S ˆ ) -sinβ cosβ 0 n (Drehung im Uhrzeiger) Die binäre Operation S ˆ = σc ˆ ˆ n n in Matrixschreibweise: ˆ ˆ ˆσ(xy) (C ) = (S ) n n
59 1 0 0 cosβ sinβ 0 cosβ sinβ sin β cosβ 0 sin β cosβ
60 4.2 Definition der Darstellung einer Gruppe Beispiel I: Gruppe C 3v (gleichseitiges Dreieck) mit Vektorpaar ( r, r ) gemäß: 1 2 y = Basis a σ 2 σ 3 r, r c 1 2 σ 1 r, r ˆ 1 2 Aufgabe: die betragsgleichen Vektoren r und r sollen den 1 2 Symmetrieoperationen der Gruppe C 3v ˆ 2 ˆ ˆ ˆ ˆ ˆ unterworfen werden. (E; σ, σ, σ ; C, C ) x b
61 Wie lauten die Transformationsgleichungen und zugehörigen Transformationsmatrizen? Die neuen Vektoren, die unter der Wirkung einer Symmetrieoperationen ˆR aus ( r, r 1 2) hervorgehen, lassen sich als Linearkombinationen aus r und r 1 2schreiben: Transformationsgleichungen Rr ˆ r ' (R) ˆ r (R) ˆ r 1 1 1,1 1 1,2 2 Rr ˆ r ' (R) ˆ r (R) ˆ r 2 2 2,1 1 2, Index: Zeile 2. Index: Spalte Allgemein: 2 Rr ˆ r'= Γ(R) ˆ r ; i = 1,2 i i i,j j j = 1
62 (R) ˆ i,j : Zahlen, die von der jeweiligen Symmetrieoperation abhängen. In Matrixschema zusammengefasst: ˆR ˆ (R) = (R) ˆ (R) ˆ (R) ˆ 1,1 1,2 (R) ˆ 2,1 2,2 ˆR Wirkung von auf Vektor r 1 (1. Spalte) Vektor (2. Spalte) r 2 Damit lauten die Transformationsgleichungen in Matrixschreibweise: (R) ˆ (R) ˆ 1,1 1,2 r r ' 1 1 (R) ˆ (R) ˆ r r ' 2,1 2,2 2 2
63 Transformationsgleichungen und (C 3v ): -Matrizen für obiges Beispiel Êr = r ˆ (E) = Er ˆ = r ˆσ r = -r (σ ˆ ) = 1 ˆσ r = r Übung ˆσ r = r r (σ ˆ ) = ˆσ r = r r ˆσ r = r r (σ ˆ ) = ˆσ r = r r
64 (Drehung der Vektoren im Uhrzeigersinn!) Ĉ r = r r ˆ 2 2 (C ) = Cˆ r = r r Ĉ r = r r ˆ (C ) = 3 ˆ C r = r r
65 Beispiel II: Vektorpaar ( r', r ') im gleichseitigen Dreieck (C 3v ) 1 2 gemäß: y a σ 2 σ 3 r, r c 1 2 σ 1 30 r, r ˆ 1 2 Transformationsgleichung und '-Matrizen für die Symmetrieoperationen von C 3v auf ( r', r '): 1 2 x b
66 Êr' = r ' '(E) ˆ = Er ˆ = r ' Vektoren r', r ' 1 2 im Uhrzeiger drehen ˆσ r' = r ' r ' '(σ ˆ ) = 1 ˆσ r ' = r ' ˆσ r' = r ' ˆσ r ' = r ' r ' '(σ ˆ ) = ˆσ r' = r ' '(σ ˆ ) = 3 ˆσ r ' = r ' Ĉ r' = r ' r ' '(C ˆ ) = 3 Cˆ r ' = r ' Ĉ r' = Ĉ r ' = r ' 0 1 ˆ 2 '(C ) = 3 r ' r '
67 Die Vektorpaare ( r, r ) und ( r', r ') sind nicht unabhängig voneinander, da ( r, r ) sich durch ( r', r ') und umgekehrt ( r', r ') sich durch ( r, r ) ausdrücken lassen, durch die Transformationsgleichung: 1 2 i 2 r'= S r ; i = 1,2 j = 1 bzw. 2 i,j j 1 r'= S r'; i = 1,2 i i,j j j = 1 i,j 1 S und S sind Zahlen, in Matrixform: i,j 1 1 S S 1,1 1,2 S S 1 1,1 1,2 S = S = 1 1 S S 2,1 2,2 S S 2,1 2,2 1 S ist die Umkehrung der Transformation zu S i,j, aber nicht i,j notwendigerweise das Reziproke von S i,j.
68 Vergleich von ( r, r ) mit ( r', r '): r' = r r S = r ' = 0 r 1 r r = r ' r ' S = r = 0 r ' 1 r ' Es ist nun SS ˆ (E) Es gilt die wichtige Beziehung: '(R) ˆ = ˆ 1 S (R) S für alle ˆR ( Ähnlichkeitstransformation )
69 Beispiel: S S ˆ (C ˆ ) (C ) Zusammenfassung: Wir haben gefunden, dass den Symmetrieoperationenen ˆR einer Gruppe Transformationsmatrizen (R) ˆ zugeordnet werden können: R ˆ (R) ˆ Damit muss durch die Multiplikationstafel für die Trafo-Matrizen gleich derjenigen der Symmetrieoperationen ˆR sein. ˆ (R) Somit muss auch gelten: PQ ˆ ˆ = R ˆ (P) ˆ (Q) ˆ = (R) ˆ (Verknüpfung ist Nacheinanderausführen der Operationen) (Verknüpfung ist Matrizenmultiplikation)
70 Beispiel: σˆˆ σ C bei Drehung des Vektors im Uhrzeigersinn! (σ ˆ ) (σ ˆ ) ˆ 1 2 (C ) (q.e.d.)
71 Sätze über Darstellungen I) Eine Menge (quadratischer) Matrizen die sich den Elementen P, Q, R,... einer Gruppe so zuordnen lassen, dass jedem Produkt zweier Gruppenelemente das Produkt der zugeordneten Matrizen entspricht, PQ = R nennt man eine Darstellung P R = der Gruppe. P, R, Q,..., Q II) Eine Darstellung hat die Dimension n, wenn die zugehörigen Matrizen n Zeilen und n Spalten (= Dimension des Basissatzes) besitzen.
72 III) Die Dimension einer Darstellung von Transformationsmatrizen wird durch die Anzahl der zu transformierenden Basisvektoren bestimmt. IV) Alle (quadratischen) Matrizen einer Darstellung haben die gleiche Dimension (ansonsten wäre eine Matrixmultiplikation nicht möglich). V) Eindimensionale Darstellungen, deren Matrizen alle gleich 1 sind, heißen identische Darstellungen (oder totalsymmetrische Darstellungen). VI) Zwei Darstellungen und ' zwischen deren Matrizen (R) und '(R) eine Beziehung '(R) ˆ = ˆ 1 S (R) S für alle R Ähnlichkeitstransformation besteht, heißen äquivalente Darstellungen.
73 4.3 Charaktere Die Summe der Diagonalelemente einer Darstellungsmatrix ˆ (R) (R) (R) (R) (R) (R) (R) (R) (R) (R) 1,1 1,2 1, l 2,1 2,2 2, l l,1 l,2 l, l nennt man den Charakter χ( (R))=Γ(R) + Γ(R) + + Γ(R) 1,1 2,2 ll, Die Gesamtheit der zu einer Darstellung Γ gehörenden Charaktere χ( (R)), χ( (P)), heißt Charakterensystem dieser Darstellung.
74 Beispiel: Darstellung Γ und Γ' der Gruppe C 3v aus Abschnitt 4.2 Operation Für Basis ˆR Charakter (r, r ) : 1 2 χ( (R)) ˆ Für Basis(r', r ') : 1 2 Charakter χ( '(R)) ˆ Ê = = 2 Klasse 1 ˆσ = = 0 ˆσ 2 ½ ½ = = 0 Klasse 2 ˆσ 3 ½ ½ = = 0 Ĉ Ĉ ½ ½ = 1 ½ ½ = = = 1 Klasse 3 Äquivalente Darstellungen χ(r) gleich
75 Wir stellen fest: 1) Äquivalente Darstellungen haben gleiche Charakterensysteme Umgekehrt gilt: Haben zwei Darstellungen gleiche Charakterensysteme, so sind sie äquivalent (unterscheiden sich höchstens durch eine Ähnlichkeitstransformation). 2) Charaktere, die zu Elementen der gleichen Klasse gehören, sind gleich. Der Charakter ist eine Klassenfunktion.
76 4.4 Reduktion von Darstellungen Eine Darstellung ist reduzibel, wenn es eine Ähnlichkeitstransformation gibt, durch die alle Matrizen dieser Darstellung in folgende gleiche Form gebracht werden: (P) 0 1 (P) (P), 2 0 (P) 1 (Q) 0 1 (Q) (Q), 2 0 (Q) 1 quadratische Untermatrizen längs der Diagonalen Die Darstellung zerfällt dann in die Darstellungen 1, 2, 3,... mit niedrigeren Dimensionen... = wobei i: i (P), i (Q),
77 Eine Darstellung heißt irreduzibel, wenn keine Ähnlichkeitstransformation existiert, die die Darstellung zum Zerfallen in Darstellungen niedrigerer Dimensionen bringt. Eine Reduzible Darstellung kann stets nur durch genau eine Ähnlichkeitstransformation in ihre irreduziblen Bestandteile zerlegt werden: 1, 2, k.. = n n n 3 3 = Σn i i i n i gibt an, wie oft i in der reduziblen Darstellung enthalten ist.
78 4.5 Charakterentafel; Sätze über irreduzible Darstellungen Die Charaktere der irreduziblen Darstellungen einer Gruppe werden in einem quadratischen Schema = Charakterentafel zusammengefasst: z.b. für die Gruppe C 3v (NH 3, BF 3 ) Punktgruppensymbol Klassen C 3v E 2C 3 3 v Irreduzible Darstellungen (Mulliken) A z x 2 + y 2, z 2 A R z E (x, y) (R x, R y ) (x 2 - y 2, xy) (xz, yz) II I III IV Charaktere
79 Dazu folgende Regeln: Bezeichnungen nach Mulliken: A: eindimensionale irreduzible Darstellung mit c, d.h. ( Ĉ ) 1 n symmetrisch bezüglich Drehung um 2/n um C n (Hauptachse) B: eindimensionale irreduzible Darstellung mit c, d.h. antisymmetrisch bezüglich Drehung um 2/n E: zweidimensionale irreduzible Darstellung ( Ĉ ) n 1 T (F): dreidimensionale irreduzible Darstellung
80 Indizes 1,2: Unterscheidung von irreduziblen Darstellungen gleicher Dimension Index 1: symmetrisch bezüglich C C, bzw. bezüglich 2 n max C v nmax (falls C 2 fehlt) Index 2: antisymmetrisch bezüglich C, bzw. bezüglich Beistriche ', ": Unterscheidung bezüglich σ h : 2 C n max C v nmax ': falls irred symmetrisch bezüglich σ h : '': falls irred antisymmetrisch Indizes g, u: Unterscheidung bezüglich Inversion. Falls i vorhanden, î erscheint jede irred.zweimal, mit g: gerade, falls irred.symmetrisch bezüglich Inversionszentrum i u: ungerade, falls irred. antisymmetrisch bezüglich Inversionszentrum i
81 Feld III (Charakterentafel): enthält Koordinaten x, y, z (infinitesimale) Drehungen um diese Achsen R x, R y, R z Unter den Operationen von C 3v verhalten sich x, y, z; R x, R y, R z unterschiedlich. An Hand der Trafo-Matrizen: 2π 2π cos -sin ˆ v π 2π Ê: C : sin cos 0 σ : mit Basis y x sieht man:
82 1) z' = (R)z ˆ ist eine Funktion von z allein; enthält keine Anteile von x und y! D.h. z bildet für sich eine Basis zur Darstellung: z = A 1 (total symmetrisch unter allen ˆR ) 2) x und y mischen in allen Trafo-Gleichungen Rx ˆ = x' = Γ(R) ˆ x + Γ(R) ˆ 1,1 1,2 Ry ˆ = y' = Γ(R) ˆ x + Γ(R) ˆ y 2,1 2,2 (x,y) gehören zusammen und bilden Basis für eine (irred.) Darstellung für sich: y 3v x,y = E '' x,y transformieren unter C nach der irreduziblen Darstellung E " keine Anteile von z!
83 D.h. Die 3D Trafo-Matrizen sind unter C 3v blockdiagonalisiert, d.h. zerfallen in Untermatrizen E C σ 3 v 1 x,y 2π 2π sin cos 3 3 z 2π 2π 1 0 cos -sin (1) (1) (1)
84 Rotation R x, R y, R z : R z : ÊR = R z z Ĉ R = R 3 z z σ R = ( 1)R v z z Darstellung ist Rz = A 2 R x, R y : transformieren wie E (analog x, y)
 5 irreduzible Darstellungen (A 1, A 2, E, T 1, T 2 ) O h : 10 Klassen 10 irreduzible Darstellungen 2) Die Quadratsumme der Dimensionen l 1, l")
85 4.6 Sätze über irreduzible Darstellungen 1) Zu jeder Gruppe gibt es genau so viele (nicht äquivalente) irreduzible Darstellungen, wie die Gruppe Klassen hat. Beispiel: T d : 5 Klassen (E, 8C 3, 3C 2, 6S 4, 6σ d ) 5 irreduzible Darstellungen (A 1, A 2, E, T 1, T 2 ) O h : 10 Klassen 10 irreduzible Darstellungen 2) Die Quadratsumme der Dimensionen l 1, l 2,, l r der nicht äquivalenten irreduziblen Darstellungen 1, 2,, r einer Gruppe ist gleich der Ordnung h der Gruppe:

86 Beispiel: C 3v C 3v mit h = 6 und 3 irreduziblen Darstellungen: l 12 + l 22 + l 32 = 6, nur möglich mit = 6, d. h. 2 eindimensionale (A 1, A 2 ) und 1 zweidimensionale (E) irreduzible Darstellungen Die Gruppe O h mit h = 48 und 10 irreduzible Darstellungen: = 48 3) Die Summe der quadrierten Charaktere einer jeden irreduziblen Darstellung für alle Symmetrieoperationen ist gleich der Ordnung h der Gruppe. i
 = 0 A 1 E: 1 1 2 + 2 1 (-1) + 3 1")
87 Beispiel C 3v : A 1 : = 6 A 2 : (-1) 2 = 6 E: (-1) (0) 2 = 6 C 3v E 2C 3 3 v A A E ) Die Vektoren, deren Komponenten die Charaktere zweier verschiedener irreduzibler Darstellungen sind, sind orthogonal: Beispiel C 3v : i j A 1 A 2 : (-1) = 0 A 1 E: (-1) (0) = 0
88 4.7 Symmetrieeigenschaften von Atomorbitalen in Molekülen beliebiger Punktsymmetrie Benutzen Charakterentafel Felder III + IV Beispiel 1: Orbitale des P in PCl 3 (C 3v ) A 1 : s, p z, d z 2 Jedes AO für sich bildet eine (eindimensionale) Basis zur irreduziblen Darstellung A 1 (das s-orbital besitzt keine Winkelabhängigkeit, transformiert deshalb immer nach der totalsymmetrischen Darstellung A 1 ) A 2 : keine Atomorbitale besitzen A 2 -Symmetrie E: (p x, p y ), (d x 2-y2, d xy ), (d xz, d yz ). Jede dieser 3 zweidimensionalen Basen transformiert nach der irreduziblen Darstellung E.
89 Beispiel: Tetraedrische Moleküle Charakterentafel für T d -Symmetrie T d E 8C S 4 6σ d A x 2 + y 2 + z 2 A E (z 2, x 2 - y 2 ) T (R x, R y, R z ) T (x, y, z) (xy, xz, yz) a) CH 4 nur s- und p-orbitale am zentralen C-Atom A 1 : s Das s-orbital ist total symmetrisch und bildet eine eindimensionale Basis zur irreduziblen Darstellung A 1 T 2 : (p x, p y, p z ) Die drei p-orbitale des C-Atoms bilden eine dreidimensionale Basis zur irreduziblen Darstellung T 2
90 b) Tetraedrische ÜM-Komplexe s-, p- und d- Orbitale am Zentralion sind an σ- Molekülorbitalen beteiligt A 1 : s E: (d z 2, d x2 -y 2) T 2 : (p x, p y, p z ), (d xy, d xz, d yz ) gehen in σ-mo-diagramm für tetraedr. Moleküle/Komplexe ein Durch Symmetrieklassifizierung mit Anwendung der Reduktionsformel findet man, dass die Orbitale mit E- und T 2 - Symmetrie auch für π-bindungen zur Verfügung stehen.
?")
91 4.8 Reduktionsformel Häufig vorkommendes Problem: Gegeben ist eine (reduzible) Darstellung einer Gruppe. Frage: in welche irreduzible Darstellungen zerfällt diese (z.b. bei Symmetrieerniedrigung)? Ausreduzieren der reduziblen Darstellungen mit Hilfe der Reduktionsformel n i i r

92 Reduktionsformel n i i r n h i gibt an, wie oft die irreduzible Darstellung in der auszureduzierenden Darstellung Ordnung der Gruppe; r i enthalten ist; i Charakter der Symmetrieoperation irreduziblen Darstellung ; i in der r Charakter der Symmetrieoperation auszureduzierenden Darstellung ; r in der Summe über alle Symmetrieoperationen
93 4.9 Anwendungen der Reduktionsformel Molekülorbitale und MO-Diagramm für Tetraedrische Moleküle/Komplexe Nur σ-bindung (z.b. CH 4 ) z Insgesamt 4σ-Bindungen: B 3 B 4 A B 1 B 2 y Aufsuchen der reduziblen Darstellung, für die der Satz ( ) eine Basis bildet. Mit der Transformationstafel: x In Pfeilrichtung blickend rechts drehen! 2

94 Wir finden als (reduzible) Darstellung: 8C 3 3C 2 6S 4 6σ d tetraedr In welche irreduziblen Darstellungen zerfällt tetraedr unter T d Symmetrie? Wir benötigen dafür die Charakterentafel für T d : T d A 1 A 2 E T 1 T Mit der Reduktionsformel: n A1 = 1/24 ( ) = 24/24 = 1 n A2 = 1/24 ( (-1) (-1)) = 0 n E = 1/24 ( (-1) ) = 0 n T1 = 1/24 ( (-1) (-1)) = 0 n T2 = 1/24 ( (-1) (-1) ) = 24/24 = 1
 * oder (d xy, d xz, d yz ) oder beide Basen *")
95 . Also: = A 1 + T tetraedr 2 d.h. die 4 MO e für die 4 σ-bindungen müssen gebildet werden aus 1 Orbital von A 1 -Symmetrie: s 3 Orbitalen von T 2 -Symmetrie: (p x, p y, p z ) * oder (d xy, d xz, d yz ) oder beide Basen * Es hängt vom Zentralatom ab, ob p-orbitale oder d-orbitale im Tetraeder (oder beide Basen) beteiligt sind. z.b. p-orbitale in: CH 4, SiF 4, AlCl 4-, ZnCl 4 -
96 Aus diesen können nach Pauling (VB-Theorie) 4 Hybridfunktionen gebildet werden, z.b. z B 4 A B 1 y B 2 B 3 x

97 Symmetrieadaptierte Ligandengruppenorbitale (SALC = Symmetry-Adapted Linear Combinations) zur Erstellung des MO- Diagramms werden entweder per inspectionem oder mit Hilfe von Projektionsoperatoren gefunden. Per inspectionem: A 1 -SALC: muß ebenfall A 1 -Symmetrie haben, d.h. Daraus die MO e vom A 1 -Typ gemäß: B 4 z A B 1 y Bindend B 2 B 3 x Antibindend

98 T 2 -SALC: z B 4 Für MO mit p z : p x : A B 1 B 2 y p y : Für d-orbitale analoges Vorgehen. B 3 x Die SALC-Funktionen können auch mit Hilfe von Projektionsoperatoren gefunden werden (später).

99 MO-Diagramm für tetraedrische AB 4 -Moleküle (nur σ-bindung!) p ( ) s ( ) Ф 2, Ф 3, Ф 4 Ф 1 A-Atom B-Atome
100 Die 3 T 2 -σ-wechselwirkungen + z + + x y p z Ф 2 p x Ф 3 p y Ф 4
 erhält man mit den Symmetrieoperationen ˆR (T d ) folgende Darstellung: T d Ê 8Cˆ 3C 2 6S 4 6σ 3 d π 8-1 0 0 0 tetr.")
101 b) π-bindung p-orbitale der B i -Atome repräsentiert durch x i, y i σ i (= z i ) Orientierung der Vektorpaare x i, y i so, daß y i XY-Ebene Für die 8 Vektoren x i, y i (i = 1, 4) erhält man mit den Symmetrieoperationen ˆR (T d ) folgende Darstellung: T d Ê 8Cˆ 3C 2 6S 4 6σ 3 d π tetr.
102 Zur Erinnerung: Drehmatrix (Gegenzeiger!) (C ˆ ) = υ cosβ sinβ sinβ cosβ 2π 2π 1 3 cos sin (C ˆ ) = 3 = 2π 2π sin cos Ĉ 3 -Drehung um z i -Achse mischt die p xi, p yi -Orbitale an den B i -Atomen. χ(c ˆ ) 1 3 Ausreduzieren mit Reduktionsformel und χ-tafel für T d - Symmetrie liefert: π.. tetr. = E + T 1 + T 2
103 D.h. in Tetraheder transformieren die p x und p y -Orbitale der B- Atome wie E, T 1, und T 2. Die χ-tafel für T d zeigt, daß am A-Atom zur π-wechselwirkung zur Verfügung stehen: E: d z 2, d x2 -y 2 T 1 : keine T 2 : (p x, p y, p z ), (d xz, d yz, d xy ) SALC von T 1 -Symmetrie der B-Atome nichtbindende MO e Qualitative MO-Diagramme für AB 4 -Tetraeder:

104
105 n E = 1/24 ( (-1) (-1) (-1) (-1)) = 0 n T1 = 1/24 ( (-1) (-1) (-1) + 6 (-1) (-1)) = 1 n T2 = 1/24 ( (-1) (-1) + 6 (-1) (-1) (-1)) = 1 Ergebnis: = A 2 + T 1 + T 2
106 4.9.2 Ligandfeldtheorie: Aufspaltung von entarteten LF-Termen bei Symmetrieerniedrigung Beispiel: E g D (5) (2) T 2g (3) Anzahl und Symmetriebezeichnungen der Spaltterme? O h D 4h Freies Ion Komplexion Komplexion im LF im LF von von O h -Symmetrie D 4h -Symmetrie (z.b. tetragonal gestauchtes Oktaeder)
107 Verfahrensweise für T 2g (O h ) Symmetrieerniedrigung nach D 4h? 1. Schritt: Feststellen, welche Symmetrieelemente die Gruppen O h und D 4h gemeinsam haben und aus welchen Klassen von Symmetrieoperationen unter O h die Klassen von D 4h hervorgehen. Man findet (vgl. Abschn a) und b)):
108 Symmetrieoperationen für O h (h = 48) D 4h (h = 16) E E 3C 2 C 2 2C 2 6C 4 2C 4 6C 2 2C 2 i i 3iC 2 ic 2 = σ h 2iC 2 = 2σ v Merke: C 3 Operationen treten unter D 4h nicht mehr auf. Aus diesem Grund sind die 8 C 3 -Operationen und die 8 ic 3 -Operationen in der Liste unter O h (h = 48) nicht aufgeführt. 6iC 4 2iC 4 = 2S 4 6iC 2 2iC 2 = 2σ d
 für die Klassen von D 4h : E 2C 4 C 2 2C' 2 2C\" 2 i 2S 4 σ h 2σ' v 2σ d χ = 3-1 -1-1 1 3-1")
109 2. Schritt: Für diese Klassen von D 4h das Charakterensystem von T 2g (O h ) aus der Charakterentafel für O h aufschreiben: Da C 3 -Operationen unter D 4h nicht mehr existieren, lautet das Charakterensystem von T 2g (O h ) für die Klassen von D 4h : E 2C 4 C 2 2C' 2 2C" 2 i 2S 4 σ h 2σ' v 2σ d χ =
110 3. Schritt: Mit Hilfe der Reduktionsformel und unter Verwendung der Charakterentafel für D 4h prüfen, ob die Darstellung T 2g (O h ) bei Symmetrieerniedrigung nach D 4h reduzibel ist und, falls ja, welche irreduziblen Darstellungen der Gruppe D 4h in der Darstellung T 2g (O h ) enthalten sind.

111 E 2C 4 C 2 2C' 2 2C" 2 i 2S 4 σ h 2σ' v 2σ d χ =
112 E 2C 4 C 2 2C' 2 2C" 2 i 2S 4 σ h 2σ' v 2σ d χ =
113 Ergebnis: In der O h -Darstellung T 2g sind je einmal die irreduziblen Darstellungen B 2g und E g der Gruppe D 4h enthalten:. T 2g (O h ) = B 2g (D 4h ) + E g (D 4h ) Analog ist mit dem Term E g (O h ) zu verfahren. Man findet:. E g (O h ) A 1g (D 4h ) + B 1g (D 4h ) (s. Korrelationsschemata B.13)

114 . Analog ist mit dem Term E g (O h ) zu verfahren: E g (O h ) A 1g (D 4h ) + B 1g (D 4h ) Zusammenfassung der Resultate in sogenannte Korrelationsschemata Beispiel für die Anwendung dieses Schemas: Frage: Welche irreduzieblen Darstellungen von C 2v sind in der irreduziblen Darstellung T 2g (O h ) enthalten?
115 Antwort: T 2g (O h ) B 2g (D 4h ) B 1 (C 2v ) E g (D 4h ) A 2 (C 2v ) B 2 (C 2v ). D.h. T 2g (O h ) = B 2g (D 4h ) + E g (D 4h ).. = B 1 (C 2v ) + A 2 (C 2v ) + B 2 (C 2v )
 irreduziblen")
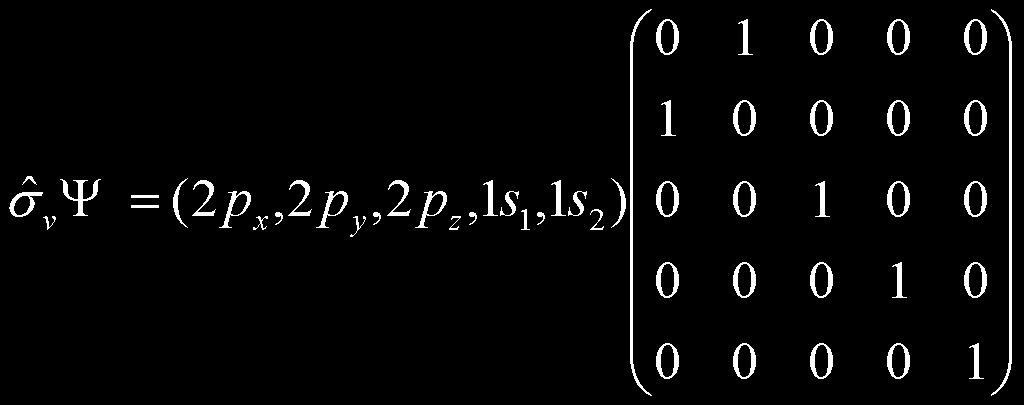
116 4.9.3 Molekülorbitaltheorie für H 2 O-Molekül; Projektionsoperator z Gruppe C 2v x H 2 H 1 σ v σ v ' y 1. Schritt: Basisfunktionen: O: (1s), (2s), 2p x, 2p y, 2p z H 1 : 1s 1 H 2 : 1s 2 2. Schritt: Transformationseigenschaften der Basisfunktionen unter den 4 Symmetrieoperationen der Gruppe C 2v : 1s und 2s sind invariant, gehören demnach zur (totalsymmetrischen) irreduziblen Darstellung A 1.

117 Die übrigen 5 Basisfunktionen bilden einen Minimalsatz, der 5- dimensionale Transformationsmatrizen, und damit eine 5- dimensionale Darstellung, für die in C 2v vorkommenden Symmetrieoperationen erzeugt. z.b.:
118
119 Die Transformationsmatrizen und das Charakterensystem der 5- dimensionalen Darstellung lassen sich mit Hilfe der Transformationstafel schnell auffinden: z Operation H 2 σ v ' Basis Orbital H 1 y p x p x -p x p y -p y x σ v p y p z s 1 s 2 p y p z s 1 s 2 -p y p z s 2 s 1 p x p z s 1 s 2 -p x p z s 2 s 1 χ( ) Charakterensystem = 5-dimensionale Darstellung
120 3. Schritt Ausreduzierung der 5-dimensionalen Darstellung Reduktionsformel mit Hilfe der i i χ( ) und der Charakterentafel für die Gruppe C 2v : C 2v A 1 A 2 B 1 B n A1 : ¼[ (-1) ] = 2 n A2 : ¼[ (-1) + 1 (-1) (-1) 1] = 0 n B1 : ¼[ (-1) (-1) (-1) 1] = 2 n B2 : ¼[ (-1) (-1) + 1 (-1) ] = 1
121 .. Also: 2A 1 + 2B 1 + B 2 Demnach sind die im 5-dimensionalen Minimalsatz enthaltenen Funktionen von den Symmetrietypen a 1, b 1 und b 2. Nur Atomfunktionen vom gleichen Symmetrietyp können zu Molekülorbitalen kombiniert werden.
 : Charakter der irreduziblen Darstellung zur")
122 4. Schritt Klassifizierung der Basisfunktionen nach ihren Symmetrieeigenschaften ( Symmetrieorbitale) unter Verwendung von Projektionsoperatoren. Definition des Charakterenprojektionsoperators f α α : Dimension der irreduziblen Darstellung h : Ordnung der Gruppe χ α α ( ) : Charakter der irreduziblen Darstellung zur Symmetrieoperation : Inverse Operation zur Symmetrieoperation
 (s. Transformationstafel): z.b. d.h.")
123 Damit lauten die hier vorkommenden Projektionsoperatoren: Projiziert Funktionen aus vom Typ a 1 b 1 b 2 Anwendung dieser Projektionsoperatoren auf alle im Basissatz vorkommenden Funktionen (Orbitale) (s. Transformationstafel): z.b. d.h. p x und p y sind keine Orbitale vom Typ a 1.
: vom Typ Ф 1 = 1s Ф 2 = 2s Ф 3 = N 3 (s 1 + s 2 ) Ф 4 = N 4 (s 1 - s 2 ) Ф 5 = 2p z Ф 6 = N 6 (2p x + 2p y ) Ф 7 = N 7 (2p x - 2p y ) a 1 a 1 a 1 b 1")
124 d.h. p z ist eine Funktion vom Typ a 1. d.h. auch ist eine Funktion vom Typ a 1. Analog findet man die Symmetrieorbitale (noch nicht normiert!): vom Typ Ф 1 = 1s Ф 2 = 2s Ф 3 = N 3 (s 1 + s 2 ) Ф 4 = N 4 (s 1 - s 2 ) Ф 5 = 2p z Ф 6 = N 6 (2p x + 2p y ) Ф 7 = N 7 (2p x - 2p y ) a 1 a 1 a 1 b 1 a 1 b 1 b 2
125 5. Schritt Linearkombination von Symmetrieorbitalen gleichen Typs zu Symmetrie-adaptierten Molekülorbitalen ( SALCAO Symmetry Adapted Linear Combination of Atomic Orbitals) a 1 : Ψ k a 1 = c 1k Ф 1 + c 2k Ф 2 + c 3k Ф 3 + c 5k Ф 5 k = 1, 2, 3, 4 b 1 : Ψ k b 1 = c 4k Ф 4 + c 6k Ф 6 k = 5, 6 b 2 : Ψ 7 b 2 = Ф 7
126 Ziel: Die Energieberechnung mit der ursprünglichen (7 7)- Säkulardeterminante (mit 7 Basisfunktionen) ist mit Symmetrieanalyse zurückgeführt auf die Berechnung je einer (4 4)-, (2 2)- und (1 1)-Determinanten. Ф 7 ist schon Eigenfunktion von H: Φ = (p p ) b -Typ x y 2 1 Φ H Φ = ( p H p + p H p ) = p H p x x y y x x + + y nichtbindend x
127 Für a 1 müssen 4 4 und für b Säkularprobleme gelöst werden bindende und antibindende MO e. a(s 1 + s 2 ) + bp z a 1 e(s 1 + s 2 ) + f 2s x + + z + y z x z + + 2s + a 1 y x y c(s 1 s 2 ) + d(p x + p y ) b 1
128 MO-Diagramm für H 2 O-Molekül a 1 * b 1 * a 1 * b 2 2p a 1 1s 1 1s 2 2s b 1 O a 1 H H
: Charakterentafel für C 2v C 2 v E C 2 σ v (xz ) σ v (yz ) Koord. + Drehungen Komp.")
129 4.9.4 Schwingungsspektroskopie: Strukturaufklärung Beispiel: Schwefeltetrafluorid SF 4. Drei mögliche Strukturen: C 2v C 3v T d Angewandt auf Tafel a): Charakterentafel für C 2v C 2 v E C 2 σ v (xz ) σ v (yz ) Koord. + Drehungen Komp. eines Tensors α A z α xx, α yy, α zz A R z α xy B x, R y α zx
130 Transformations-Verhalten von Drehungen (zur Charakterentafel) z z σ v σ v y y x σ v R z = -R z x σ v R z = -R z aber z. B. C 2 R y = -R y C 2 R z = R z
131 Zu den Komponenten α ij : α ij transformieren wie x i x j C 2 : x -x, y -y, z z x² x², y² y², z² z² σ v : x x, y -y, z z x² x², y² y², z² z² usw.
132 Fall a) C 2v -Symmetrie:
133 Transformationstafel: Operation (x i, y i, z i ) ˆR ˆR S (x S, y S, z S ) F 1 (x 1, y 1, z 1 ) F 2 (x 2, y 2, z 2 ) F 3 (x 3, y 3, z 3 ) F 4 (x 4, y 4, z 4 ) χ(r) Ê Ĉ 2 ˆσ (xz) v ' ˆσ (yz) v (x S, y S, z S ) (x 1, y 1, z 1 ) (x 2, y 2, z 2 ) (x 3, y 3, z 3 ) (x 4, y 4, z 4 ) 15 (-x S, -y S, z S ) (-x 4, -y 4, z 4 ) (-x 3, -y 3, z 3 ) (-x 2, -y 2, z 2 ) (-x 1, -y 1, z 1 ) -1 (x S, -y S, z S ) (x 4, -y 4, z 4 ) (x 2, -y 2, z 2 ) (x 3, -y 3, z 3 ) (x 1, -y 1, z 1 ) 3 (-x S, y S, z S ) (-x 1, y 1, z 1 ) (-x 3, y 3, z 3 ) (-x 2, y 2, z 2 ) (-x 4, y 4, z 4 ) 3 Reduzible Darstellung
 + 1 1 3 + 1 1 3] = 5 n A2 : ¼[1 1 15 +")
134 Reduktionsformel: Reduzible Darstellung: i * ˆR Ê Ĉ2 i ˆσ (xz) v ' ˆσ (yz) v χ(r) Charakterentafel für C 2v : C 2 v E C 2 σ v (xz ) σ v (yz ) Koord./Drehungen Tensorkomponenten α A z α xx, α yy, α zz A R z α xy B x, R y α zx B y, R x α yz n A1 : ¼[ (-1) ] = 5 n A2 : ¼[ (-1) + 1 (-1) (-1) 3] = 2 n B1 : ¼[ (-1) (-1) (-1) 3] = 4 n B2 : ¼[ (-1) (-1) + 1 (-1) ] = 4
135 Σn Г i = = 15 3N Freiheitsgraden eines 5-atomigen Moleküls Dimension des Basissatzes Davon entfallen je eine irreduzible Darstellung auf Translation in x-richtung: B 1 (s. Charakterentafel) y-richtung: B 2 z-richtung: A 1 Rotation um x-achse: B 2 y-achse: B 1 z-achse: A 2 Nach Subtraktion dieser 6 Γ i verbleiben die Schwingungen: 4A 1 = 4 Schwingungen, da A und B eindimensional 1A 2 = 1 2B 1 = 2 2B 2 = 2 Σ: 9 Schwingungen = 3N 6
136 Welche der 9 Normalschwingungen sind IR- bzw. Raman-aktiv? Bedingung für IR-Aktiviät: g ex ψ x ˆ ψ dτ 0 A (dir. Produkt) und/oder v v 1 g ex ψ y ˆ ψ dτ 0 // // v v v g ex ψ z ˆ ψ dτ 0 //. v g Da x, ˆ y, ˆ zˆ ungerade und ψ v immer gerade (A 1 ) sind, folgt: Eine Fundamentalschwingung ist IR-aktiv, wenn der angeregte Schwingungszustand die gleiche Symmetrie besitzt wie mindestens einer der Vektoren ˆ ˆ ˆ d.h. x, y, z ex ˆ ˆ ˆ irred. v irred. Γ (ψ ) = Γ (x, y, z) Danach (s. Charakterentafel): Schwingungen der Rassen A 1 ( ˆx!) B 1 ( ŷ!) B 2 (!) ẑ IR-aktiv A 2 IR-inaktiv (enthält nicht x, ˆ y, ˆ zˆ)
137 Erwartet werden: 4A 1 -Schwingungen 2B 1 - // 2B 2 - // Ingesamt 8 IR-aktive Schwingungen Bedingung für Raman-Aktivität: g ˆ ex ψ P ψ dτ 0 A (im direkt. Produkt) v v 1 mit P ˆ : xx, ˆ ˆ yy, ˆ ˆ zz, ˆˆ xy, ˆ ˆ xz, ˆ ˆ yz ˆ ˆ g Da ψ v gerade, folgt: ex Eine Fundamentalschwingung ist Raman-aktiv, wenn ψ v die gleiche Symmetrie besitzt wie mindestens eine Komponente des Polarisierbarkeitstensors.
138 Danach (s. Charakterentafel): Alle Rassen unter C 2v sind Raman-aktiv Zu erwarten: 4A 1 -Schwingungen, polarisiert! 1A 2-2B 1-2B 2 - Ingesamt 9 Raman-Linien zu Fundamentalschwingungen Analoge Behandlung von Fall b (C 3v ) und Fall c (T d ) (als Übung!) führt zu: IR-aktive 8 (4A 1, 2B 1, 2B 2 ) Raman-aktive 9 (4A 1, A 2, 2B 1, 2B 2 ) Polarisierte Normalschwingungen C 2v T d C 3v gefunden 4 (4A 1 ) 2 (2T 2 ) 6 (3A 1, 3E) 5 4 (A 1, E, 2T 2 ) 1 (A 1 ) 6 (3A 1, 3E) 3 (3A 1 ) 5 1
139 Ergebnis: T d scheidet aus, da mehr IR- und Raman-Linien gefunden als erlaubt. Aus Analyse der Bandenkonturen: C 2v (durch andere Methoden beitätigt) Merke: Oftmals werden weniger Fundamentalschwingungen beobachtet als von der Theorie her erwartet; Grund: kleines Übergangsmoment geringe Intensität
140 5. Gruppentheorie und Quantenmechanik. Wellenfunktionen als Basen für irreduzible Darstellungen 5.1 Beispiel p-orbitale des N in NH 3 Frage: Wie transformieren p x und p y unter den Symmetrieoperationen des NH 3 -Moleküls (C 3v ) und zu welcher irreduziblen Darstellung gehören sie? p = Cr sin cos x p = Cr sin sin C = y 2 C : E, ˆ 2C ˆ, 3σˆ 3v 3 v 1 3

141 Vorgehen: Zu finden sind die Transformationsmatrizen zu und die zugehörigen Charaktere. E, ˆ C ˆ und σˆ 3 v z r x φ y
142 E, ˆ C ˆ, σˆ Unter allen Operationen ( ) bleibt unverändert, somit: 3 v Bei Rotation um Und somit 2 3 sin sin 2 1 um z-achse: cos cos( ) cos cos sin sin cos( b ) cos cos b sin sin b 1 3 cos ( )sin
143 2 2 2 sin sin( ) sin cos cos sin sin cos Bei Spiegelung an (xz)-ebene: (σ v ) 2 1 und somit cos cos( ) cos sin sin 2 1 Mit diesen Transformationen erhält man für die Operationen:
144 E ˆ : Ep ˆ = E(C ˆ sin cos ) C sin cos x = Csin cos = p 1 1 x Ep ˆ = E(C ˆ sin sin ) C sin sin y = Csin cos = p 1 1 y C ˆ : Cˆ p = C ˆ (Csin cos ) = Csin cos 3 3 x = C(sin )( )(cos + 3 sin ) = = Csin cos 1 1 Csin 1 sin = p p x 2 2 y
145 C ˆ : Cˆ p = C ˆ (Csin sin ) = Csin sin 3 3 y = C(sin )( )(sin 3 cos ) = = 3C sin cos C sin sin = 3p p x 2 2 σ ˆ : σˆ p = σ ˆ (C sin cos ) C sin cos v v x v = Csin cos = p y 1 1 x σˆ p = σ ˆ (Csin sin ) Csin sin v y v 1 1 Csin sin p 1 1 y 2 2
146 In Matrixschreibweise erhält man für diese Operationen: 1 0 ˆ E(p, p ) (p, p ) (p, p ); χ(e) ˆ = 2 x y x y x y C ˆ (p, p ) (p, p ) χ(c ) = x y x y ˆ σ ˆ (p, p ) (p, p ) χ(σ ˆ ) = 0 v x y x y v 0 1 ˆ χ(r) Da der Charakter eine Klassenfunktion ist, genügt es, von jeder Klasse jeweils nur eine Operation zu untersuchen.
147 Wir stellen fest: (a) Die gefundenen Charaktere sind die der irreduziblen Darstellung E in der Gruppe C 3v : C 3v E 2C 3 3σ v A A E 2-1 0
148 (b) Die Orbitale p x und p y bilden als Paar (p x, p y ) eine Basis für die irreduzible Darstellung E. (d.h. die Funktionen p x und p y gehören zur irreduziblen Darstellung E) (c) Die Funktionen sin cosj p sin sinj p transformieren wie die Koordinaten x bzw. y. Deshalb die Bezeichnungen p x bzw. p y. x y
149 5.2 Kugelflächenfunktionen allgemein Kugelflächenfunktionen sind die Lösungen der winkelabhängigen Differentialgleichung des H-Atoms. Die Einelektronenzustandsfunktionen inklusive Ortsabhängigkeit lauten: Bei Vorliegen eines kugelsymmetrischen Potentials V(r) bilden die Funktionen einen 2l+1-fach entarteten Funktionensatz. Beispiel: d-funktionen: 5-fach bahnentartet f-funktionen: 7-fach
150 Aufgabe: Zu untersuchen ist das Transformationsverhalten dieser Funktionen unter der Wirkung der Symmetrieoperationen der Kugeldrehspiegelungsgruppe, also a) Drehungen (um beliebige Achse, die durch den Koordinatenursprung geht; b) Inversion (am Koordinatenursprung); c) Drehung + Inversion Aus den Transformationsmatrizen lassen sich deren Charaktere bestimmen. a) Drehung um Winkel φ um beliebige Achse, denn alle Drehungen um den Winkel φ gehörigen zur gleichen Klasse und haben gleiche Charaktere χ(c ˆ ). υ Wir wählen als Achse: z-achse ( constant) Für Drehung φ E = φ A + φ: φ A : zu Beginn der Drehung φ E : am Ende der Drehung
151 d.h. die Funktion geht unter der Wirkung der Drehung mit dem Winkel φ um die z-achse bis auf den Faktor e im lφ in sich über: Für eine Drehung der 2l+1-fach entarteten Basis erhält man die Drehmatrix

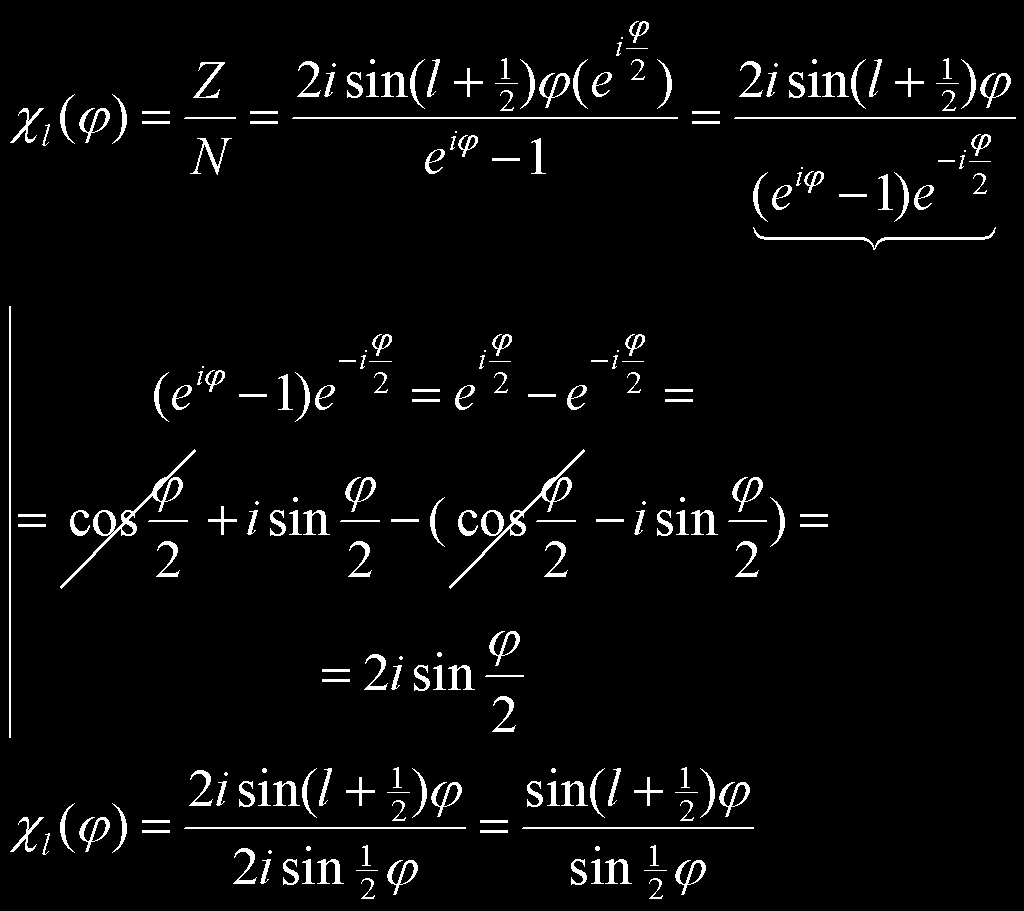
152 Nur die Koeffizienten verschieden. der Hauptdiagonalen sind von Null Für den Charakter χ l (φ) findet man:

153 Dies ist eine geometrische Reihe mit Anfangsglied a = e ilφ Mit der Summenformel: Quotient q = e iφ Anzahl der Glieder n = 2l + 1 findet man Ausrechnung
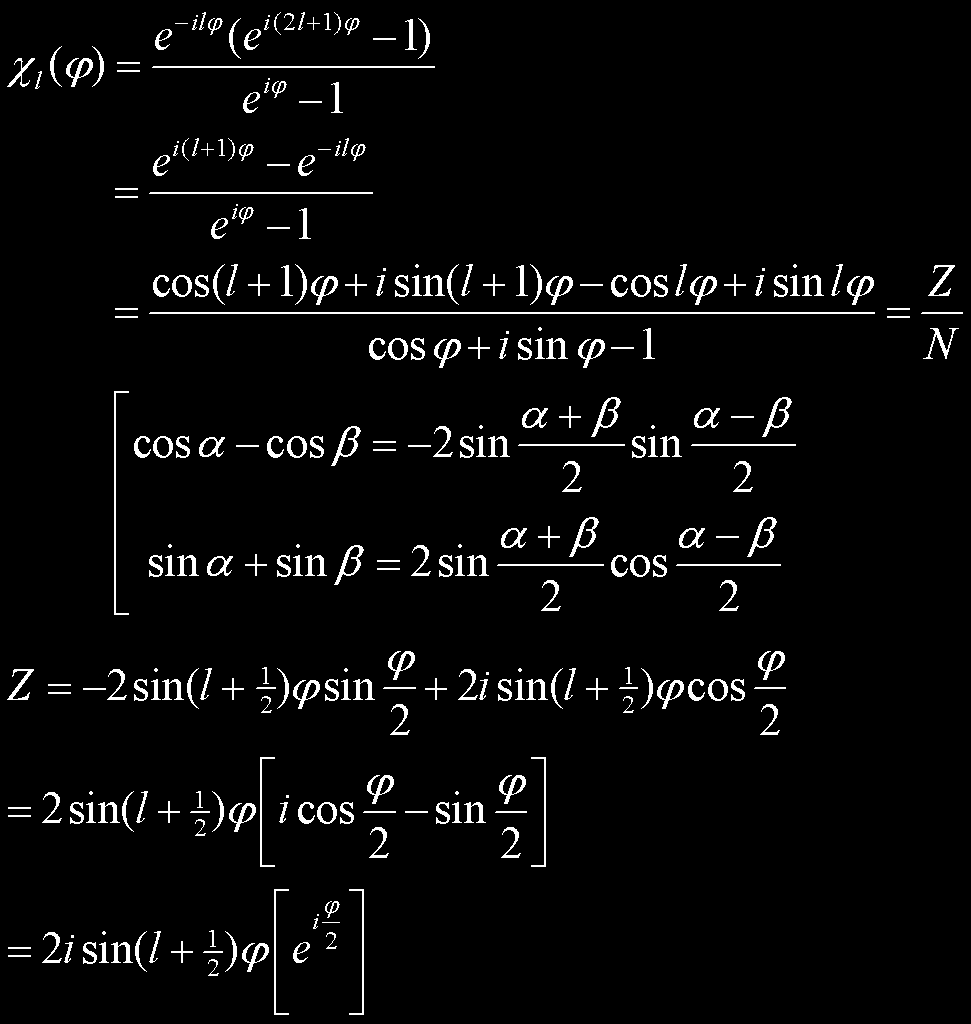
154
155
 ( Beispiel 1) l +1 s, d, g, ungerade Funktionen 1 p, f, h,")
156 Für spezielle Winkel φ ergibt sich damit: Für die Inversion der Kugelflächenfunktionen am Koordinatenursprung erhält man: d.h. bei Inversion geht eine Kugelflächenfunktion bis auf den Faktor ( 1) l in sich über. Demgemäß kennt man gerade Funktionen (Fktn. mit gerader Parität) ( Beispiel 1) l +1 s, d, g, ungerade Funktionen 1 p, f, h,
 χ 2 (i) = (2 2 + 1)( 1) 2 = +5 Darstellungsmatrix, die durch eine Basis Ψ n,l,nl (m l = +l,, l) induziert wird und")
157 Darstellungsmatrix für Inversion: Mit dem Charakter χ l (i) = (2l + 1)( 1) l z.b. für d-funktionen (l = 2) χ 2 (i) = ( )( 1) 2 = +5 Darstellungsmatrix, die durch eine Basis Ψ n,l,nl (m l = +l,, l) induziert wird und eine Drehung mit φ und anschließende Inversion beschreibt, ist:
158 Mit diesen Informationen kann man auffinden, welche Darstellung (Charakterensystem) eine Basis Ψ n,l,nl (m l = +l,, l) induziert, wenn man diese den Drehungen, der Inversion bzw. den aus Drehung und Inversion zusammengesetzten Symmetrieoperationen einer beliebigen Punktgruppe (die Untergruppe der Kugeldrehspiegelungsgruppe ist) unterwirft. Beispiel: Gruppe O h Es kommen u.a. vor:

159 Charaktere von Darstellungsmatrizen, die von Kugelflächenfunktionen Y l,m l bzw. von Atomfunktionen Ψ n,l,m induziert werden. l
160 Frage: Welche irreduziblen Bestandteile sind in den Darstellungen der O h -Gruppe für l = 0, 1, 2 enthalten? Mit Hilfe der Reduktionsformel und der Charakterentafel für O h findet man: Irreduzible Darstellungen Entartung der Basis l = 0 (s) A 1g 1 l = 1 (p) T 1u 3. l = 2 (d) E g + T 2g 5.. l = 3 (f) A 2u + T 1u + T 2u 7... l = 4 (g) A 1g + E g + T 1g + T 2g 9.. l = 5 (h) E u + 2T 1u + T 2u 11
161 z.b. l = 2 n A1g = 1/48[ (-1) (-1) (-1) (-1) ] = 0 n Eg = 1/48[ (-1) (-1) (-1) (-1) (-1) (-1) ] = 48/48 = 1 n T2g = 1/48[ (-1) (-1) + 6 (-1) (-1) (-1) (-1) + 6 (-1) (-1) ] = 48/48 = 1 Nach diesem Verfahren findet man folgendes Korrelationsschema:
162 Charakterentafel für O h -Symmetrie O h E 8C 3 3C 2 =(C 4 ) 2 6C 4 6C 2 i 6S 4 (6iC 4 ) 8S 6 (8iC 3 ) 3σ h (3iC 2 ) 6σ d (6iC 2 ) linear, rotations quadratic A 1g x 2 +y 2 +z 2 A 1u A 2g E g (2z 2 -x 2 -y 2, x 2 -y 2 ) T 1g (R x, R y, R z ) T 2g (xz, yz, xy) A 2u E u T 1u (x, y, z) T 2u

163 Korrelationsschema der von Basen Ψ n,l,m l, l = 0, 1, 2, 3, 4, 5, induzierten irreduziblen Darstellungen der Gruppen O h, T d, D 3, D 4h, C 4v, C 2v.
Klausur zur Vorlesung Symmetrie in Chemie und Spektroskopie
 Klausur zur Vorlesung Symmetrie in Chemie und Spektroskopie Zulässige Hilfsmittel: Charakterentafeln, Schema Hierarchie der Punktgruppen SS 6 Prof. Dr. B. Dick Aufgabe 1 (15P): Finden Sie die Punktgruppe
Klausur zur Vorlesung Symmetrie in Chemie und Spektroskopie Zulässige Hilfsmittel: Charakterentafeln, Schema Hierarchie der Punktgruppen SS 6 Prof. Dr. B. Dick Aufgabe 1 (15P): Finden Sie die Punktgruppe
= {e} U (1) U (2) U (3) = {e,a,b,c} 4 : e a b e e a b a a c e b b e c
 U (2) U (3) = {e,a,b,c} 4 : e a b e e a b a a c e b b e c") KONZEPT DER GRUPPE 6.7 Untergruppen U ist eine Gruppe mit derselben Gruppenoperation wie G und der Ordnung h U h G U ist dann eine Untergruppe von G, wenn alle u i G sind. Beispiel 9: Untergruppen von
KONZEPT DER GRUPPE 6.7 Untergruppen U ist eine Gruppe mit derselben Gruppenoperation wie G und der Ordnung h U h G U ist dann eine Untergruppe von G, wenn alle u i G sind. Beispiel 9: Untergruppen von
Gruppentheorie und Symmetrie in der Chemie
 Gruppentheorie und Symmetrie in der Chemie Martin Schütz Institut für theoretische Chemie, Universität Stuttgart Pfaffenwaldring 55, D-7569 Stuttgart Stuttgart, 8. Mai M. Schütz, Vorlesung Gruppentheorie
Gruppentheorie und Symmetrie in der Chemie Martin Schütz Institut für theoretische Chemie, Universität Stuttgart Pfaffenwaldring 55, D-7569 Stuttgart Stuttgart, 8. Mai M. Schütz, Vorlesung Gruppentheorie
O ist gegenüber C 2. invariant. Allgemein bezeichnet man mit C n. ist symmetrisch gegenüber, das JCl Ion gegenüber C 4
 107 KAPITEL J Symmetrien 1. Einleitung a) Warum Symmetriebetrachtungen? Je komplizierter die Probleme, desto mehr spielen Symmetriebetrachtungen eine Rolle. Die Symmetriebetrachtungen in der Molekülphysik
107 KAPITEL J Symmetrien 1. Einleitung a) Warum Symmetriebetrachtungen? Je komplizierter die Probleme, desto mehr spielen Symmetriebetrachtungen eine Rolle. Die Symmetriebetrachtungen in der Molekülphysik
2 Symmetrieoperationen und -elemente. 1.8 Klassen 2 SYMMETRIEOPERATIONEN UND -ELEMENTE 7
 SYMMETRIEOPERATIONEN UND -ELEMENTE 7.8 Klassen Zweck: Zusammenfassen zueinander ähnlicher (konjugierter) Elemente einer Gruppe. Durch Bestimmung aller Klassen ergibt sich eine eindeutige Zerlegung on G:
SYMMETRIEOPERATIONEN UND -ELEMENTE 7.8 Klassen Zweck: Zusammenfassen zueinander ähnlicher (konjugierter) Elemente einer Gruppe. Durch Bestimmung aller Klassen ergibt sich eine eindeutige Zerlegung on G:
ACF-Vorkurs: Symmetrie in der Anorganischen Chemie
 ACF-Vorkurs: Symmetrie in der Anorganischen Chemie Stichworte: - Symmetrielemente - Punktgruppen - Charaktertafeln - Anwendung in der MO-Theorie I.1 Zur qualitativen Beschreibung genügt es oft, die Form
ACF-Vorkurs: Symmetrie in der Anorganischen Chemie Stichworte: - Symmetrielemente - Punktgruppen - Charaktertafeln - Anwendung in der MO-Theorie I.1 Zur qualitativen Beschreibung genügt es oft, die Form
Absorptionsspektrum von PTCDA und DiMe-PTCDI
 3. Gruppentheorie Absorption coefficient *10 5 6 4 2 0 Absorptionsspektrum von PTCDA und DiMe-PTCDI PTCDA Wavelength / nm 800 700 600 500 400 HOMO-LUMO Übergang S 0 -S 1 transition S 0 -S 2 transition
3. Gruppentheorie Absorption coefficient *10 5 6 4 2 0 Absorptionsspektrum von PTCDA und DiMe-PTCDI PTCDA Wavelength / nm 800 700 600 500 400 HOMO-LUMO Übergang S 0 -S 1 transition S 0 -S 2 transition
Gruppentheorie und Symmetrie in der Chemie
 Gruppentheorie und Symmetrie in der Chemie Martin Schütz Institut für theoretische Chemie, Universität Stuttgart Pfaffenwaldring 55, D-70569 Stuttgart Stuttgart, 26. April 2002 Mathematische Definition
Gruppentheorie und Symmetrie in der Chemie Martin Schütz Institut für theoretische Chemie, Universität Stuttgart Pfaffenwaldring 55, D-70569 Stuttgart Stuttgart, 26. April 2002 Mathematische Definition
Musterlösungen Blatt Mathematischer Vorkurs. Sommersemester Dr. O. Zobay. Matrizen
 Musterlösungen Blatt 8 34007 Mathematischer Vorkurs Sommersemester 007 Dr O Zobay Matrizen Welche Matrixprodukte können mit den folgenden Matrizen gebildet werden? ( 4 5 A, B ( 0 9 7, C 8 0 5 4 Wir können
Musterlösungen Blatt 8 34007 Mathematischer Vorkurs Sommersemester 007 Dr O Zobay Matrizen Welche Matrixprodukte können mit den folgenden Matrizen gebildet werden? ( 4 5 A, B ( 0 9 7, C 8 0 5 4 Wir können
Gruppentheorie und Symmetrie in der Chemie
 Gruppentheorie und Symmetrie in der Chemie Martin Schütz Institut für theoretische Chemie, Universität Stuttgart Pfaffenwaldring 55, D-70569 Stuttgart Stuttgart, 3. Mai 00 Stabilizers von Atomen Ein Operator
Gruppentheorie und Symmetrie in der Chemie Martin Schütz Institut für theoretische Chemie, Universität Stuttgart Pfaffenwaldring 55, D-70569 Stuttgart Stuttgart, 3. Mai 00 Stabilizers von Atomen Ein Operator
Anorganische Chemie III
 Seminar zur Vorlesung Anorganische Chemie III Wintersemester 2015/16 Christoph Wölper Institut für Anorganische Chemie der Universität Duisburg-Essen Wiederholung Was bisher geschah # Darstellungen für
Seminar zur Vorlesung Anorganische Chemie III Wintersemester 2015/16 Christoph Wölper Institut für Anorganische Chemie der Universität Duisburg-Essen Wiederholung Was bisher geschah # Darstellungen für
Allgemeine Chemie Symmetrie von Molekülen
 Allgemeine Chemie Symmetrie von Molekülen AC_Molekuelsymmetrie.doc Seite 1 von 23 Fck / 12.10.05 Inhaltsverzeichnis 1 Einleitung...3 1.1 Anwendungsbereiche der Molekülsymmetrie...3 1.2 Sinn und Zweck der
Allgemeine Chemie Symmetrie von Molekülen AC_Molekuelsymmetrie.doc Seite 1 von 23 Fck / 12.10.05 Inhaltsverzeichnis 1 Einleitung...3 1.1 Anwendungsbereiche der Molekülsymmetrie...3 1.2 Sinn und Zweck der
Theoretische Chemie II. (Gruppentheorie)
") Theoretische Chemie II (Gruppentheorie) Modul BCh 4.4 Sommersemester 2016 i Vorwort Dieses Skript enthält die wesentlichen Inhalte, mathematischen Formeln und Abbildungen der Vorlesung Theoretische Chemie
Theoretische Chemie II (Gruppentheorie) Modul BCh 4.4 Sommersemester 2016 i Vorwort Dieses Skript enthält die wesentlichen Inhalte, mathematischen Formeln und Abbildungen der Vorlesung Theoretische Chemie
4 Matrixdarstellung von Symmetrieoperationen
 4 MATRIXDARSTELLUNG VON SYMMETRIEOPERATIONEN 4 Konsistenz der minimalen Symmetrieanalyse: fehlende Symmetrieelemente? Beispiel 3: Punktgruppe D h Im Schema (3.1) wird die Punktgruppe D h durch Auffinden
4 MATRIXDARSTELLUNG VON SYMMETRIEOPERATIONEN 4 Konsistenz der minimalen Symmetrieanalyse: fehlende Symmetrieelemente? Beispiel 3: Punktgruppe D h Im Schema (3.1) wird die Punktgruppe D h durch Auffinden
ANWENDUNG DER GRUPPENTHEORIE IN DER QUANTENMECHANIK
 M. I. PETRASCHEN E. D. TRIFONOW ANWENDUNG DER GRUPPENTHEORIE IN DER QUANTENMECHANIK In deutscher Sprache herausgegeben von Prof. Dr. rer. nat. habil. ARMIN UHLMANN Leipzig Mit 22 Abbildungen und 16 Tabellen
M. I. PETRASCHEN E. D. TRIFONOW ANWENDUNG DER GRUPPENTHEORIE IN DER QUANTENMECHANIK In deutscher Sprache herausgegeben von Prof. Dr. rer. nat. habil. ARMIN UHLMANN Leipzig Mit 22 Abbildungen und 16 Tabellen
Outline. 1 Vektoren im Raum. 2 Komponenten und Koordinaten. 3 Skalarprodukt. 4 Vektorprodukt. 5 Analytische Geometrie. 6 Lineare Räume, Gruppentheorie
 Outline 1 Vektoren im Raum 2 Komponenten und Koordinaten 3 Skalarprodukt 4 Vektorprodukt 5 Analytische Geometrie 6 Lineare Räume, Gruppentheorie Roman Wienands (Universität zu Köln) Mathematik II für Studierende
Outline 1 Vektoren im Raum 2 Komponenten und Koordinaten 3 Skalarprodukt 4 Vektorprodukt 5 Analytische Geometrie 6 Lineare Räume, Gruppentheorie Roman Wienands (Universität zu Köln) Mathematik II für Studierende
Seminar zum Praktikum Anorganische Chemie III III
 Seminar zum Praktikum Anorganische Chemie III III Metallorganische Chemie Dr. J. Wachter IR-Teil3 www.chemie.uni-regensburg.de/anorganische_chemie/scheer/lehre.html www.chemie.uniregensburg.de/anorganische_chemie/wachter/lehre.html
Seminar zum Praktikum Anorganische Chemie III III Metallorganische Chemie Dr. J. Wachter IR-Teil3 www.chemie.uni-regensburg.de/anorganische_chemie/scheer/lehre.html www.chemie.uniregensburg.de/anorganische_chemie/wachter/lehre.html
LCAO-Ansatz und Punktsymmetrie
 LCAO-Ansatz und Punktsymmetrie Quantenchemische Rechenmethoden: Grundlagen und Anwendungen M+K-Kurs, 3.2015 Nutzen von Symmetrie bei quantenchemischen Rechnungen (LCAO-Ansatz) Wiederholung Punktgruppen
LCAO-Ansatz und Punktsymmetrie Quantenchemische Rechenmethoden: Grundlagen und Anwendungen M+K-Kurs, 3.2015 Nutzen von Symmetrie bei quantenchemischen Rechnungen (LCAO-Ansatz) Wiederholung Punktgruppen
Kristallstruktur und Mikrostruktur Teil I Vorlesung 2
 Kristallstruktur und Mikrostruktur Teil I Vorlesung 2 1 Kristallstruktur und Teil I Scripte Mikrostruktur http://www.uni-stuttgart.de/mawi/aktuelles_lehrangebot/lehrangebot.html 2 Wiederholung Koordinatensysteme
Kristallstruktur und Mikrostruktur Teil I Vorlesung 2 1 Kristallstruktur und Teil I Scripte Mikrostruktur http://www.uni-stuttgart.de/mawi/aktuelles_lehrangebot/lehrangebot.html 2 Wiederholung Koordinatensysteme
3. Gruppentheorie für Fußgänger
 3. Gruppentheorie für Fußgänger Methan als Beispiel Methan als Beispiel Raumgruppen 230 Raumgruppen in 3d Symmetrie-Elemente Weitere wichtige Definitionen Untergruppe Konjugationsklasse Abelsche Gruppen:
3. Gruppentheorie für Fußgänger Methan als Beispiel Methan als Beispiel Raumgruppen 230 Raumgruppen in 3d Symmetrie-Elemente Weitere wichtige Definitionen Untergruppe Konjugationsklasse Abelsche Gruppen:
Einführung in den Symmetriebegriff und gruppentheoretische Grundlagen
 Einführung in den Symmetriebegriff und gruppentheoretische Grundlagen Stephanie Artmeier WS 0/ Inhaltsverzeichnis Einführung... Gruppen.... Beispiel gleichseitiges Dreieck... 3. Darstellung von Gruppen...
Einführung in den Symmetriebegriff und gruppentheoretische Grundlagen Stephanie Artmeier WS 0/ Inhaltsverzeichnis Einführung... Gruppen.... Beispiel gleichseitiges Dreieck... 3. Darstellung von Gruppen...
Kristallstruktur und Mikrostruktur Teil I Vorlesung 2
 Kristallstruktur und Mikrostruktur Teil I Vorlesung 2 1 Kristallstruktur und Teil I Scripte Mikrostruktur http://www.uni-stuttgart.de/mawi/aktuelles_lehrangebot/lehrangebot.html 2 Wiederholung Koordinatensysteme
Kristallstruktur und Mikrostruktur Teil I Vorlesung 2 1 Kristallstruktur und Teil I Scripte Mikrostruktur http://www.uni-stuttgart.de/mawi/aktuelles_lehrangebot/lehrangebot.html 2 Wiederholung Koordinatensysteme
BC 1.2 Mathematik WS 2016/17. BC 1.2 Mathematik Zusammenfassung Kapitel II: Vektoralgebra und lineare Algebra. b 2
 Zusammenfassung Kapitel II: Vektoralgebra und lineare Algebra 1 Vektoralgebra 1 Der dreidimensionale Vektorraum R 3 ist die Gesamtheit aller geordneten Tripel (x 1, x 2, x 3 ) reeller Zahlen Jedes geordnete
Zusammenfassung Kapitel II: Vektoralgebra und lineare Algebra 1 Vektoralgebra 1 Der dreidimensionale Vektorraum R 3 ist die Gesamtheit aller geordneten Tripel (x 1, x 2, x 3 ) reeller Zahlen Jedes geordnete
13. ABBILDUNGEN EUKLIDISCHEN VEKTORRÄUMEN
 13. ABBILDUNGEN in EUKLIDISCHEN VEKTORRÄUMEN 1 Orthogonale Abbildungen im R 2 und R 3. Eine orthogonale Abbildung ist eine lineare Abbildung, die Längen und Orthogonalität erhält. Die zugehörige Matrix
13. ABBILDUNGEN in EUKLIDISCHEN VEKTORRÄUMEN 1 Orthogonale Abbildungen im R 2 und R 3. Eine orthogonale Abbildung ist eine lineare Abbildung, die Längen und Orthogonalität erhält. Die zugehörige Matrix
Lösbarkeit linearer Gleichungssysteme
 Lösbarkeit linearer Gleichungssysteme Lineares Gleichungssystem: Ax b, A R m n, x R n, b R m L R m R n Lx Ax Bemerkung b 0 R m Das Gleichungssystem heißt homogen a A0 0 Das LGS ist stets lösbar b Wenn
Lösbarkeit linearer Gleichungssysteme Lineares Gleichungssystem: Ax b, A R m n, x R n, b R m L R m R n Lx Ax Bemerkung b 0 R m Das Gleichungssystem heißt homogen a A0 0 Das LGS ist stets lösbar b Wenn
Vektoren und Matrizen
 Universität Basel Wirtschaftswissenschaftliches Zentrum Vektoren und Matrizen Dr. Thomas Zehrt Inhalt: 1. Vektoren (a) Einführung (b) Linearkombinationen (c) Länge eines Vektors (d) Skalarprodukt (e) Geraden
Universität Basel Wirtschaftswissenschaftliches Zentrum Vektoren und Matrizen Dr. Thomas Zehrt Inhalt: 1. Vektoren (a) Einführung (b) Linearkombinationen (c) Länge eines Vektors (d) Skalarprodukt (e) Geraden
2. Exkurs: Spaziergang durch die Gruppentheorie!"#$
 2. Exkurs: Spaziergang durch die Gruppentheorie $ Gruppentheorie ein durchaus kompliziertes Teilgebiet der Mathematik!" Gegenstand: systematische Behandlung von Symmetrie!" Bei Verzicht auf mathematische
2. Exkurs: Spaziergang durch die Gruppentheorie $ Gruppentheorie ein durchaus kompliziertes Teilgebiet der Mathematik!" Gegenstand: systematische Behandlung von Symmetrie!" Bei Verzicht auf mathematische
Übungsblatt
 Übungsblatt 3 3.5.27 ) Die folgenden vier Matrizen bilden eine Darstellung der Gruppe C 4 : E =, A =, B =, C = Zeigen Sie einige Gruppeneigenschaften: a) Abgeschlossenheit: Berechnen Sie alle möglichen
Übungsblatt 3 3.5.27 ) Die folgenden vier Matrizen bilden eine Darstellung der Gruppe C 4 : E =, A =, B =, C = Zeigen Sie einige Gruppeneigenschaften: a) Abgeschlossenheit: Berechnen Sie alle möglichen
Symmetrien. Transformationen. Affine und euklidische Räume
 Symmetrien Transformationen Der Gruppenbegriff entwickelte sich aus dem Begriff der Transformationsgruppe. In dieser Form tauchen auch die meisten Gruppen in der Mathematik, Physik, Chemie, Kristallographie,
Symmetrien Transformationen Der Gruppenbegriff entwickelte sich aus dem Begriff der Transformationsgruppe. In dieser Form tauchen auch die meisten Gruppen in der Mathematik, Physik, Chemie, Kristallographie,
Ausarbeitung zum Vortrag Symmetrie in der Molekülphysik
 WWU Münster Institut für Theoretische Physik Seminar zur Theorie der Atome, Kerne und kondensierten Materie Ausarbeitung zum Vortrag Symmetrie in der Molekülphysik Marcel Hahn, m hahn07@uni-muenster.de
WWU Münster Institut für Theoretische Physik Seminar zur Theorie der Atome, Kerne und kondensierten Materie Ausarbeitung zum Vortrag Symmetrie in der Molekülphysik Marcel Hahn, m hahn07@uni-muenster.de
Gruppentheorie ERNST MORITZ ARNDT UNIVERSITÄT GREIFSWALD. Mathematisch-Naturwissenschaftliche Fakultät INSTITUT FÜR BIOCHEMIE
 ERNST MORITZ ARNDT UNIVERSITÄT GREIFSWALD Mathematisch-Naturwissenschaftliche Fakultät INSTITUT FÜR BIOCHEMIE Arbeitskreis Physikalische Chemie Prof. Dr. Walter Langel Gruppentheorie Molekülschwingungen
ERNST MORITZ ARNDT UNIVERSITÄT GREIFSWALD Mathematisch-Naturwissenschaftliche Fakultät INSTITUT FÜR BIOCHEMIE Arbeitskreis Physikalische Chemie Prof. Dr. Walter Langel Gruppentheorie Molekülschwingungen
g g 1 = g 1 g = e. (79)
") B Anhang B B.1 Kristallographische Symmetriegruppen B.1.1 Definition Eine Menge G = {g 1, g 2,...,g k,... } von Elementen g k nennt man eine Gruppe, wenn die Verknüpfung (Operator: ) der Elemente g k die
B Anhang B B.1 Kristallographische Symmetriegruppen B.1.1 Definition Eine Menge G = {g 1, g 2,...,g k,... } von Elementen g k nennt man eine Gruppe, wenn die Verknüpfung (Operator: ) der Elemente g k die
LCAO-Ansatz und Punktsymmetrie
 LCAO-Ansatz und Punktsymmetrie Quantenchemische Rechenmethoden: Grundlagen und Anwendungen M+K-Kurs, 3.2017 Nutzen von Symmetrie bei quantenchemischen Rechnungen (LCAO-Ansatz) Wiederholung Punktgruppen
LCAO-Ansatz und Punktsymmetrie Quantenchemische Rechenmethoden: Grundlagen und Anwendungen M+K-Kurs, 3.2017 Nutzen von Symmetrie bei quantenchemischen Rechnungen (LCAO-Ansatz) Wiederholung Punktgruppen
1 Konzept der Gruppe. 1.1 Allgemeine Nomenklatur. 1.2 Gruppenaxiome 1 KONZEPT DER GRUPPE 1
 1 KONZEPT DER GRUPPE 1 In dieser Vorlesung sollen spektroskopische Auswahlregeln, die auf der Symmetrie von Molekülen basieren, vorgestellt werden. Mit Hilfe dieser Regeln lassen sich optische und Schwingungs-Spektren
1 KONZEPT DER GRUPPE 1 In dieser Vorlesung sollen spektroskopische Auswahlregeln, die auf der Symmetrie von Molekülen basieren, vorgestellt werden. Mit Hilfe dieser Regeln lassen sich optische und Schwingungs-Spektren
Universität Stuttgart Physik und ihre Didaktik PD Dr. Holger Cartarius. Matrizen. a 1,1 a 1,2 a 1,n a 2,1 a 2,2 a 2,n A = a m,1 a m,2 a m,n
 Universität Stuttgart Physik und ihre Didaktik PD Dr Holger Cartarius Matrizen Matrizen: Ein rechteckiges Zahlenschema der Form a 1,1 a 1,2 a 1,n a 2,1 a 2,2 a 2,n A a m,1 a m,2 a m,n (a) nennt man eine
Universität Stuttgart Physik und ihre Didaktik PD Dr Holger Cartarius Matrizen Matrizen: Ein rechteckiges Zahlenschema der Form a 1,1 a 1,2 a 1,n a 2,1 a 2,2 a 2,n A a m,1 a m,2 a m,n (a) nennt man eine
PC II Kinetik und Struktur. Kapitel 5. Symmetrie
 PC II Kinetik und Struktur Kapitel 5 Symmetrie Symmetrie Wozu? Symmetrieoperationen, Punktgruppen, Charakterentafeln Symmetrie von Molekülen, Orbitalen, Schwingungen 1 Was ist Symmetrie? 2 Symmetrie -
PC II Kinetik und Struktur Kapitel 5 Symmetrie Symmetrie Wozu? Symmetrieoperationen, Punktgruppen, Charakterentafeln Symmetrie von Molekülen, Orbitalen, Schwingungen 1 Was ist Symmetrie? 2 Symmetrie -
PC II Kinetik und Struktur. Kapitel 5. Symmetrie
 PC II Kinetik und Struktur Kapitel 5 Symmetrie Symmetrie Wozu? Symmetrieoperationen, Punktgruppen, Charakterentafeln Symmetrie von Molekülen, Orbitalen, Schwingungen 1 Was ist Symmetrie? 2 Symmetrie -
PC II Kinetik und Struktur Kapitel 5 Symmetrie Symmetrie Wozu? Symmetrieoperationen, Punktgruppen, Charakterentafeln Symmetrie von Molekülen, Orbitalen, Schwingungen 1 Was ist Symmetrie? 2 Symmetrie -
9 Eigenwerte und Eigenvektoren
 92 9 Eigenwerte und Eigenvektoren Wir haben im vorhergehenden Kapitel gesehen, dass eine lineare Abbildung von R n nach R n durch verschiedene Darstellungsmatrizen beschrieben werden kann (je nach Wahl
92 9 Eigenwerte und Eigenvektoren Wir haben im vorhergehenden Kapitel gesehen, dass eine lineare Abbildung von R n nach R n durch verschiedene Darstellungsmatrizen beschrieben werden kann (je nach Wahl
9 Eigenwerte und Eigenvektoren
 92 9 Eigenwerte und Eigenvektoren Wir haben im vorhergehenden Kapitel gesehen, dass eine lineare Abbildung von R n nach R n durch verschiedene Darstellungsmatrizen beschrieben werden kann (je nach Wahl
92 9 Eigenwerte und Eigenvektoren Wir haben im vorhergehenden Kapitel gesehen, dass eine lineare Abbildung von R n nach R n durch verschiedene Darstellungsmatrizen beschrieben werden kann (je nach Wahl
Transformation Allgemeines Die Lage eines Punktes kann durch einen Ortsvektor (ausgehend vom Ursprung des Koordinatensystems
 Transformation - 1 1. Allgemeines 2. Zwei durch eine Translation verknüpfte gleichartige Basissysteme 3. Zwei durch eine Translation verknüpfte verschiedenartige Basissysteme (noch gleiche Orientierung)
Transformation - 1 1. Allgemeines 2. Zwei durch eine Translation verknüpfte gleichartige Basissysteme 3. Zwei durch eine Translation verknüpfte verschiedenartige Basissysteme (noch gleiche Orientierung)
Mathematik II Frühjahrssemester 2013
 Mathematik II Frühjahrssemester 213 Prof. Dr. Erich Walter Farkas Kapitel 7: Lineare Algebra Kapitel 7.5: Eigenwerte und Eigenvektoren einer quadratischen Matrix Prof. Dr. Erich Walter Farkas Mathematik
Mathematik II Frühjahrssemester 213 Prof. Dr. Erich Walter Farkas Kapitel 7: Lineare Algebra Kapitel 7.5: Eigenwerte und Eigenvektoren einer quadratischen Matrix Prof. Dr. Erich Walter Farkas Mathematik
2. Gruppen und Körper
 2. Gruppen und Körper (2.1) Def. Eine Gruppe ist eine Menge, genannt G, und eine Abbildung ( innere Verknüpfung ) von G G nach G, hier bezeichnet als so daß folgende Eigenschaften erfüllt sind: : G G G,
2. Gruppen und Körper (2.1) Def. Eine Gruppe ist eine Menge, genannt G, und eine Abbildung ( innere Verknüpfung ) von G G nach G, hier bezeichnet als so daß folgende Eigenschaften erfüllt sind: : G G G,
2. Linear Combination of Atomic Orbitals
 . Linear Combination of Atomi Orbitals Molekülorbitale werden mit ilfe des Variationsansatzes erhalten. Beispiel: -atomiges Molekül Atom, ϕ Atom, ϕ amilton-operator: Orthonormierung: ˆ ϕ El. Atom ϕ = =
. Linear Combination of Atomi Orbitals Molekülorbitale werden mit ilfe des Variationsansatzes erhalten. Beispiel: -atomiges Molekül Atom, ϕ Atom, ϕ amilton-operator: Orthonormierung: ˆ ϕ El. Atom ϕ = =
Verknüpfung zweier C 2 Drehachsen
 Phsikalische und Theoretische Methoden der Anorganischen Chemie, WS 2009/10 Verknüpfung zweier Drehachsen 2 C (360 /2) = C 360 /2 D (360 /2) Phsikalische und Theoretische Methoden der Anorganischen Chemie,
Phsikalische und Theoretische Methoden der Anorganischen Chemie, WS 2009/10 Verknüpfung zweier Drehachsen 2 C (360 /2) = C 360 /2 D (360 /2) Phsikalische und Theoretische Methoden der Anorganischen Chemie,
2. Aufgabe Vereinfachen Sie die folgenden Ausdrücke so, dass möglichst wenige Multiplikationen ausgeführt werden müssen!
 Studiengang: PT/LOT/PVHT Semester: WS 9/ lgebra Serie: 2 Thema: Matrizen, Determinanten. ufgabe Gegeben sind die Matrizen = µ 2 3 2 µ 3 2 4, B = 2 Berechnen Sie: a) 2 + 3B b) B 2 c) B T d) B T e) T B f)
Studiengang: PT/LOT/PVHT Semester: WS 9/ lgebra Serie: 2 Thema: Matrizen, Determinanten. ufgabe Gegeben sind die Matrizen = µ 2 3 2 µ 3 2 4, B = 2 Berechnen Sie: a) 2 + 3B b) B 2 c) B T d) B T e) T B f)
Schrödinger-Gleichung
 Schrödinger-Gleichung abgeleitet aus Teilchen-Welle-Dualismus (de Broglie) Ψ = Ε Ψ Der amiltonian enthält kinetische und potentielle Energie aller Teilchen wirkt auf die Wellenfunktion Ψ. Ψ 2 beschreibt
Schrödinger-Gleichung abgeleitet aus Teilchen-Welle-Dualismus (de Broglie) Ψ = Ε Ψ Der amiltonian enthält kinetische und potentielle Energie aller Teilchen wirkt auf die Wellenfunktion Ψ. Ψ 2 beschreibt
2.3.4 Drehungen in drei Dimensionen
 2.3.4 Drehungen in drei Dimensionen Wir verallgemeinern die bisherigen Betrachtungen nun auf den dreidimensionalen Fall. Für Drehungen des Koordinatensystems um die Koordinatenachsen ergibt sich 1 x 1
2.3.4 Drehungen in drei Dimensionen Wir verallgemeinern die bisherigen Betrachtungen nun auf den dreidimensionalen Fall. Für Drehungen des Koordinatensystems um die Koordinatenachsen ergibt sich 1 x 1
Kapitel 3. Vektorräume. Josef Leydold Mathematik für VW WS 2017/18 3 Vektorräume 1 / 41. : x i R, 1 i n x n
 Kapitel Vektorräume Josef Leydold Mathematik für VW WS 07/8 Vektorräume / 4 Reeller Vektorraum Die Menge aller Vektoren x mit n Komponenten bezeichnen wir mit x R n =. : x i R, i n x n und wird als n-dimensionaler
Kapitel Vektorräume Josef Leydold Mathematik für VW WS 07/8 Vektorräume / 4 Reeller Vektorraum Die Menge aller Vektoren x mit n Komponenten bezeichnen wir mit x R n =. : x i R, i n x n und wird als n-dimensionaler
Kapitel 3. Vektorräume. Josef Leydold Mathematik für VW WS 2017/18 3 Vektorräume 1 / 41
 Kapitel 3 Vektorräume Josef Leydold Mathematik für VW WS 2017/18 3 Vektorräume 1 / 41 Reeller Vektorraum Die Menge aller Vektoren x mit n Komponenten bezeichnen wir mit R n = x 1. x n : x i R, 1 i n und
Kapitel 3 Vektorräume Josef Leydold Mathematik für VW WS 2017/18 3 Vektorräume 1 / 41 Reeller Vektorraum Die Menge aller Vektoren x mit n Komponenten bezeichnen wir mit R n = x 1. x n : x i R, 1 i n und
K. Eppler, Inst. f. Num. Mathematik Übungsaufgaben. 11. Übung: Woche vom
 Übungsaufgaben 11. Übung: Woche vom 9. 1.-13. 1. 2017 (Numerik): Heft Ü 1: 12.28.a,b; 12.29.b,c (jeweils mit Fehlerabschätzung); 6.26; 6.27.a (auch mit Lagrange-Interpolationspolynom); 6.25; 6.28 (auch
Übungsaufgaben 11. Übung: Woche vom 9. 1.-13. 1. 2017 (Numerik): Heft Ü 1: 12.28.a,b; 12.29.b,c (jeweils mit Fehlerabschätzung); 6.26; 6.27.a (auch mit Lagrange-Interpolationspolynom); 6.25; 6.28 (auch
Matrizen und Determinanten, Aufgaben
 Matrizen und Determinanten, Aufgaben Inhaltsverzeichnis 1 Multiplikation von Matrizen 1 11 Lösungen 3 2 Determinanten 6 21 Lösungen 7 3 Inverse Matrix 8 31 Lösungen 9 4 Matrizengleichungen 11 41 Lösungen
Matrizen und Determinanten, Aufgaben Inhaltsverzeichnis 1 Multiplikation von Matrizen 1 11 Lösungen 3 2 Determinanten 6 21 Lösungen 7 3 Inverse Matrix 8 31 Lösungen 9 4 Matrizengleichungen 11 41 Lösungen
44 Orthogonale Matrizen
 44 Orthogonale Matrizen 44.1 Motivation Im euklidischen Raum IR n haben wir gesehen, dass Orthonormalbasen zu besonders einfachen und schönen Beschreibungen führen. Wir wollen das Konzept der Orthonormalität
44 Orthogonale Matrizen 44.1 Motivation Im euklidischen Raum IR n haben wir gesehen, dass Orthonormalbasen zu besonders einfachen und schönen Beschreibungen führen. Wir wollen das Konzept der Orthonormalität
9 WOODWARD-HOFFMANN-REGELN 92
 9 WOODWARD-HOFFMANN-REGELN 92 Die SMOs des Reaktanden und der Produkte (die nach Idealisierung nicht mehr unterschieden werden) müssen konstruiert und nach ihrer Knotenstruktur energetisch klassifiziert
9 WOODWARD-HOFFMANN-REGELN 92 Die SMOs des Reaktanden und der Produkte (die nach Idealisierung nicht mehr unterschieden werden) müssen konstruiert und nach ihrer Knotenstruktur energetisch klassifiziert
Symmetrieelemente C 3 C 2 C 3 O H H N H H H
 Symmetrieelemente Ein Symmetrielement liegt vor, wenn ein Objekt (hier: Molekül) durch eine Symmetrieoperation mit sich selbst zur Deckung gebracht werden kann. neue und alter Orientierung nicht unterscheidbar
Symmetrieelemente Ein Symmetrielement liegt vor, wenn ein Objekt (hier: Molekül) durch eine Symmetrieoperation mit sich selbst zur Deckung gebracht werden kann. neue und alter Orientierung nicht unterscheidbar
Symmetrie und Anwendungen
 PC II Kinetik und Struktur Kapitel 6 Symmetrie und Anwendungen Symmetrie von Schwingungen und Orbitalen, Klassifizierung von Molekülschwingungen Auswahlregeln: erlaubte verbotene Übergänge IR-, Raman-,
PC II Kinetik und Struktur Kapitel 6 Symmetrie und Anwendungen Symmetrie von Schwingungen und Orbitalen, Klassifizierung von Molekülschwingungen Auswahlregeln: erlaubte verbotene Übergänge IR-, Raman-,
35 Matrixschreibweise für lineare Abbildungen
 35 Matrixschreibweise für lineare Abbildungen 35 Motivation Wir haben gesehen, dass lineare Abbildungen sich durch ihre Wirkung auf die Basisvektoren ausdrücken lassen Mithilfe von Matrizen können wir
35 Matrixschreibweise für lineare Abbildungen 35 Motivation Wir haben gesehen, dass lineare Abbildungen sich durch ihre Wirkung auf die Basisvektoren ausdrücken lassen Mithilfe von Matrizen können wir
bzw. eine obere Dreiecksmatrix die Gestalt (U: upper)
") bzw. eine obere Dreiecksmatrix die Gestalt (U: upper) U = u 11 u 12 u 1n 1 u nn 0 u 22 u 2n 1 u 2n 0......... 0 0 u n 1n 1 u n 1n 0 0 0 u nn Eine nicht notwendig quadratische Matrix A = (a ij ) heißt obere
bzw. eine obere Dreiecksmatrix die Gestalt (U: upper) U = u 11 u 12 u 1n 1 u nn 0 u 22 u 2n 1 u 2n 0......... 0 0 u n 1n 1 u n 1n 0 0 0 u nn Eine nicht notwendig quadratische Matrix A = (a ij ) heißt obere
Crash-Kurs Komplexe Zahlen
 1 Definitionen: j, C, z Im Körper R der reellen Zahlen besitzt die lineare Gleichung ax + b = 0 (a, bεr; a 0) stets eine Lösung. Die quadratische Gleichung ax 2 + bx + c = 0 führt zu der Lösungsformel
1 Definitionen: j, C, z Im Körper R der reellen Zahlen besitzt die lineare Gleichung ax + b = 0 (a, bεr; a 0) stets eine Lösung. Die quadratische Gleichung ax 2 + bx + c = 0 führt zu der Lösungsformel
Die Gruppe der affinen Abbildungen A
 H. Burkhardt, Institut für Informatik, Universität Freiburg ME-I, Kap. 2b 1 Die Gruppe der affinen Abbildungen A Die Gruppe der affinen Abbildungen entsteht durch Wahl einer beliebigen regulären Matrix
H. Burkhardt, Institut für Informatik, Universität Freiburg ME-I, Kap. 2b 1 Die Gruppe der affinen Abbildungen A Die Gruppe der affinen Abbildungen entsteht durch Wahl einer beliebigen regulären Matrix
Darstellungstheorie I
 Darstellungstheorie I Vortrag im Rahmen des Proseminars: Gruppentheorie und Quantenmechanik von Prof. Dr. Jan Louis und Dr. Robert Richter Universität Hamburg Jan Oliver Rieger 8. November 2012 1 1 Grundlegende
Darstellungstheorie I Vortrag im Rahmen des Proseminars: Gruppentheorie und Quantenmechanik von Prof. Dr. Jan Louis und Dr. Robert Richter Universität Hamburg Jan Oliver Rieger 8. November 2012 1 1 Grundlegende
gegeben: G sei endliche Gruppe, jede Untergruppe von G sei ein Normalteiler zu zeigen: je zwei Elemente teilerfremder Ordnung kommutieren
 Stefan K. 4.Übungsblatt Algebra I Aufgabe 1 gegeben: G sei endliche Gruppe, jede Untergruppe von G sei ein Normalteiler von G zu zeigen: je zwei Elemente teilerfremder Ordnung kommutieren Beweis: Seien
Stefan K. 4.Übungsblatt Algebra I Aufgabe 1 gegeben: G sei endliche Gruppe, jede Untergruppe von G sei ein Normalteiler von G zu zeigen: je zwei Elemente teilerfremder Ordnung kommutieren Beweis: Seien
Gruppenaxiome. Gegeben sei eine Menge von Elementen IM = {A, B, C,...} Es gibt eine eindeutige Operation : A B = P. IM bildet eine Gruppe, wenn gilt:
 Gruppenaxiome Gegeben sei eine Menge von Elementen IM = {A, B, C,...} (A B C...) Es gibt eine eindeutige Operation : A B = P IM bildet eine Gruppe, wenn gilt: 1. Abgeschlossenheit: A, B IM (A B) IM 2.
Gruppenaxiome Gegeben sei eine Menge von Elementen IM = {A, B, C,...} (A B C...) Es gibt eine eindeutige Operation : A B = P IM bildet eine Gruppe, wenn gilt: 1. Abgeschlossenheit: A, B IM (A B) IM 2.
Definition 1.2. Eine kontinuierliche Gruppe mit einer endlichen Menge an Parametern heißt endliche kontinuierliche Gruppe. x cosξ sinξ y sinξ cosξ
 8 Gruppentheorie 1 Lie-Gruppen 1.1 Endliche kontinuierliche Gruppe Definition 1.1. Eine Menge G mit einer Verknüpfung m heißt Gruppe, falls folgende Axiome erfüllt sind: (i) Die Operation m, genannt Multiplikation,
8 Gruppentheorie 1 Lie-Gruppen 1.1 Endliche kontinuierliche Gruppe Definition 1.1. Eine Menge G mit einer Verknüpfung m heißt Gruppe, falls folgende Axiome erfüllt sind: (i) Die Operation m, genannt Multiplikation,
mit "Skalarprodukt" aus i-tem "Zeilenvektor" und j-tem "Spaltenvektor"
 Zusammenfassung Matrizen Transponierte: Addition: mit Skalare Multiplikation: Matrixmultiplikation: m x p m x n n x p mit ES "Skalarprodukt" aus i-tem "Zeilenvektor" und j-tem "Spaltenvektor" "Determinante"
Zusammenfassung Matrizen Transponierte: Addition: mit Skalare Multiplikation: Matrixmultiplikation: m x p m x n n x p mit ES "Skalarprodukt" aus i-tem "Zeilenvektor" und j-tem "Spaltenvektor" "Determinante"
20. und 21. Vorlesung Sommersemester
 2. und 21. Vorlesung Sommersemester 1 Der Spezialfall fester Drehachse Aus dem Trägheitstensor sollte der früher behandelte Spezialfall fester Drehachse wieder hervorgehen. Wenn man ω = ω n mit einem Einheitsvektor
2. und 21. Vorlesung Sommersemester 1 Der Spezialfall fester Drehachse Aus dem Trägheitstensor sollte der früher behandelte Spezialfall fester Drehachse wieder hervorgehen. Wenn man ω = ω n mit einem Einheitsvektor
Komplexe Zahlen und Allgemeines zu Gruppen
 Komplexe Zahlen und Allgemeines zu Gruppen Die komplexen Zahlen sind von der Form z = x + iy mit x, y R, wobei i = 1 als imaginäre Einheit bezeichnet wird. Wir nennen hierbei Re(z = x den Realteil von
Komplexe Zahlen und Allgemeines zu Gruppen Die komplexen Zahlen sind von der Form z = x + iy mit x, y R, wobei i = 1 als imaginäre Einheit bezeichnet wird. Wir nennen hierbei Re(z = x den Realteil von
4.1. Vektorräume und lineare Abbildungen
 4.1. Vektorräume und lineare Abbildungen Mengen von Abbildungen Für beliebige Mengen X und Y bezeichnet Y X die Menge aller Abbildungen von X nach Y (Reihenfolge beachten!) Die Bezeichnungsweise erklärt
4.1. Vektorräume und lineare Abbildungen Mengen von Abbildungen Für beliebige Mengen X und Y bezeichnet Y X die Menge aller Abbildungen von X nach Y (Reihenfolge beachten!) Die Bezeichnungsweise erklärt
Darstellungstheorie. Vortag von Heiko Fischer - Proseminar QM
 Darstellungstheorie Vortag von Heiko Fischer - Proseminar QM Wir haben uns in den vergangenen Vorträgen intensiv mit den Eigenschaften abstrakter Gruppen beschäftigt. Im physikalischen Kontext sind Gruppen
Darstellungstheorie Vortag von Heiko Fischer - Proseminar QM Wir haben uns in den vergangenen Vorträgen intensiv mit den Eigenschaften abstrakter Gruppen beschäftigt. Im physikalischen Kontext sind Gruppen
Lineare Algebra. 1 Lineare Abbildungen
 Lineare Algebra Die lineare Algebra ist ein Teilgebiet der Mathematik, welches u. A. zur Beschreibung geometrischer Abbildungen und diverser Prozesse und zum Lösen linearer Gleichungssysteme mit Hilfe
Lineare Algebra Die lineare Algebra ist ein Teilgebiet der Mathematik, welches u. A. zur Beschreibung geometrischer Abbildungen und diverser Prozesse und zum Lösen linearer Gleichungssysteme mit Hilfe
Mathematik I+II Frühlingsemester 2019 Kapitel 8: Lineare Algebra 8.5 Eigenwerte und Eigenvektoren
 Mathematik I+II Frühlingsemester 219 Kapitel 8: Lineare Algebra 8.5 Eigenwerte und Eigenvektoren Prof. Dr. Erich Walter Farkas http://www.math.ethz.ch/ farkas 1 / 46 8. Lineare Algebra: 5. Eigenwerte und
Mathematik I+II Frühlingsemester 219 Kapitel 8: Lineare Algebra 8.5 Eigenwerte und Eigenvektoren Prof. Dr. Erich Walter Farkas http://www.math.ethz.ch/ farkas 1 / 46 8. Lineare Algebra: 5. Eigenwerte und
Diagonalisierbarkeit symmetrischer Matrizen
 ¾ Diagonalisierbarkeit symmetrischer Matrizen a) Eigenwerte und Eigenvektoren Die Matrix einer linearen Abbildung ³: Î Î bezüglich einer Basis ( Ò ) ist genau dann eine Diagonalmatrix wenn jeder der Basisvektoren
¾ Diagonalisierbarkeit symmetrischer Matrizen a) Eigenwerte und Eigenvektoren Die Matrix einer linearen Abbildung ³: Î Î bezüglich einer Basis ( Ò ) ist genau dann eine Diagonalmatrix wenn jeder der Basisvektoren
1.3 Gruppen. Algebra I 9. April 2008 c Rudolf Scharlau,
 Algebra I 9. April 2008 c Rudolf Scharlau, 2002 2008 18 1.3 Gruppen Der Begriff der Gruppe ordnet sich in gewisser Weise dem allgemeineren Konzept der Verknüpfung (auf einer Menge) unter. So ist zum Beispiel
Algebra I 9. April 2008 c Rudolf Scharlau, 2002 2008 18 1.3 Gruppen Der Begriff der Gruppe ordnet sich in gewisser Weise dem allgemeineren Konzept der Verknüpfung (auf einer Menge) unter. So ist zum Beispiel
Mathematik II Frühlingsemester 2015 Kapitel 8: Lineare Algebra 8.5 Eigenwerte und Eigenvektoren
 Mathematik II Frühlingsemester 215 Kapitel 8: Lineare Algebra 8.5 Eigenwerte und Eigenvektoren www.math.ethz.ch/education/bachelor/lectures/fs215/other/mathematik2 biol Prof. Dr. Erich Walter Farkas http://www.math.ethz.ch/
Mathematik II Frühlingsemester 215 Kapitel 8: Lineare Algebra 8.5 Eigenwerte und Eigenvektoren www.math.ethz.ch/education/bachelor/lectures/fs215/other/mathematik2 biol Prof. Dr. Erich Walter Farkas http://www.math.ethz.ch/
Lineare Algebra 1. Roger Burkhardt
 Lineare Algebra 1 Roger Burkhardt roger.burkhardt@fhnw.ch Fachhochschule Nordwestschweiz Hochschule für Technik Institut für Geistes- und Naturwissenschaft HS 2010/11 2 Rechenoperationen und Gesetze Gleichheit
Lineare Algebra 1 Roger Burkhardt roger.burkhardt@fhnw.ch Fachhochschule Nordwestschweiz Hochschule für Technik Institut für Geistes- und Naturwissenschaft HS 2010/11 2 Rechenoperationen und Gesetze Gleichheit
Lineare Transformationen und Determinanten. 10-E Ma 1 Lubov Vassilevskaya
 Lineare Transformationen und Determinanten 10-E Ma 1 Lubov Vassilevskaya Lineare Transformation cc Definition: V und W sind zwei Vektorräume. Eine Funktion T nennt man eine lineare Transformation von V
Lineare Transformationen und Determinanten 10-E Ma 1 Lubov Vassilevskaya Lineare Transformation cc Definition: V und W sind zwei Vektorräume. Eine Funktion T nennt man eine lineare Transformation von V
6.3 Eigenwerte. γ ist Eigenwert von T [T] B B γi ist nicht invertierbar.
![6.3 Eigenwerte. γ ist Eigenwert von T [T] B B γi ist nicht invertierbar.](/thumbs/70/62033901.jpg "6.3 Eigenwerte. γ ist Eigenwert von T [T] B B γi ist nicht invertierbar.") Um zu zeigen, dass die irreduziblen Teiler eines reellen Polynoms höchstens den Grad 2 haben, fassen wir nun (x γ) und (x γ) zusammen und stellen fest, dass (x (a + b i))(x ((a b i)) = x 2 2a + (a 2 +
Um zu zeigen, dass die irreduziblen Teiler eines reellen Polynoms höchstens den Grad 2 haben, fassen wir nun (x γ) und (x γ) zusammen und stellen fest, dass (x (a + b i))(x ((a b i)) = x 2 2a + (a 2 +
Vektoren - Die Basis
 Vektoren - Die Basis Motivation (Als Vereinfachung - der Schreibarbeit - wählen wir meistens Vektoren in R 2.) Eigentlich ist ja Alles klar! Für einen Vektor a gilt a = ( a x a y )! Am Ende werden wir
Vektoren - Die Basis Motivation (Als Vereinfachung - der Schreibarbeit - wählen wir meistens Vektoren in R 2.) Eigentlich ist ja Alles klar! Für einen Vektor a gilt a = ( a x a y )! Am Ende werden wir
Mathematik LK 12 M1, 4. Kursarbeit Matrizen und Stochastik Lösung )
") Aufgabe 1: Berechne die Determinante und die Transponierte der folgenden Matrizen: 0 1 1.1 M =( 0 4 1 4 det M =0 4 1 4= 4 M T =( 5 3 3 1.2 1 1 3 A=( =( A T 3 0 1 5 1 3 3 1 0 3 3 1 4 4 det M = 5 1 1+3 3
Aufgabe 1: Berechne die Determinante und die Transponierte der folgenden Matrizen: 0 1 1.1 M =( 0 4 1 4 det M =0 4 1 4= 4 M T =( 5 3 3 1.2 1 1 3 A=( =( A T 3 0 1 5 1 3 3 1 0 3 3 1 4 4 det M = 5 1 1+3 3
Invariantentheorie. Bewegungen
 Prof. Dr. H. Brenner Osnabrück WS 2012/2013 Invariantentheorie Vorlesung 21 In den folgenden Vorlesungen werden wir die endlichen Untergruppen G SL 2 (C) und ihre Invariantenringe klassifizieren. Dieses
Prof. Dr. H. Brenner Osnabrück WS 2012/2013 Invariantentheorie Vorlesung 21 In den folgenden Vorlesungen werden wir die endlichen Untergruppen G SL 2 (C) und ihre Invariantenringe klassifizieren. Dieses
D-MATH Tommaso Goldhirsch. Serie 3
 Serie 3 Aufgabe 1 Sei G eine Gruppe und X eine Teilmenge von G. Die von X erzeugte Untergruppe von G ist die kleinste Untergruppe von G die X enthält. (Dass es eindeutig eine "kleinste" gibt wird in der
Serie 3 Aufgabe 1 Sei G eine Gruppe und X eine Teilmenge von G. Die von X erzeugte Untergruppe von G ist die kleinste Untergruppe von G die X enthält. (Dass es eindeutig eine "kleinste" gibt wird in der
TECHNISCHE UNIVERSITÄT MÜNCHEN FERIENKURS. Lineare Algebra FLORIAN NIEDERREITER & AILEEN WOLF
 TECHNISCHE UNIVERSITÄT MÜNCHEN FERIENKURS Lineare Algebra FLORIAN NIEDERREITER & AILEEN WOLF 07.03.2016-11.03.2016 Inhaltsverzeichnis Inhaltsverzeichnis 1 Darstellungsmatrizen 2 2 Diagonalisierbarkeit
TECHNISCHE UNIVERSITÄT MÜNCHEN FERIENKURS Lineare Algebra FLORIAN NIEDERREITER & AILEEN WOLF 07.03.2016-11.03.2016 Inhaltsverzeichnis Inhaltsverzeichnis 1 Darstellungsmatrizen 2 2 Diagonalisierbarkeit
3 Invertierbare Matrizen Die Inverse einer (2 2)-Matrix Eigenschaften invertierbarer Matrizen... 18
-Matrix Eigenschaften invertierbarer Matrizen... 18") Wirtschaftswissenschaftliches Zentrum Universität Basel Mathematik 2 Dr. Thomas Zehrt Vektoren und Matrizen Inhaltsverzeichnis Vektoren(Wiederholung bzw. Selbststudium 2. Linearkombinationen..............................
Wirtschaftswissenschaftliches Zentrum Universität Basel Mathematik 2 Dr. Thomas Zehrt Vektoren und Matrizen Inhaltsverzeichnis Vektoren(Wiederholung bzw. Selbststudium 2. Linearkombinationen..............................
Matrizen und Drehungen
 Matrizen und Drehungen 20. Noember 2003 Diese Ausführungen sind im wesentlichen dem Skript zur Vorlesung Einführung in die Theoretische Physik I und II on PD Dr. Horst Fichtner entnommen. Dieses entstand
Matrizen und Drehungen 20. Noember 2003 Diese Ausführungen sind im wesentlichen dem Skript zur Vorlesung Einführung in die Theoretische Physik I und II on PD Dr. Horst Fichtner entnommen. Dieses entstand
Hauptachsentransformation: Eigenwerte und Eigenvektoren
 Hauptachsentransformation: Eigenwerte und Eigenvektoren die bisherigen Betrachtungen beziehen sich im Wesentlichen auf die Standardbasis des R n Nun soll aufgezeigt werden, wie man sich von dieser Einschränkung
Hauptachsentransformation: Eigenwerte und Eigenvektoren die bisherigen Betrachtungen beziehen sich im Wesentlichen auf die Standardbasis des R n Nun soll aufgezeigt werden, wie man sich von dieser Einschränkung
Verschiedenes. Exponieren einer Matrix. Wir betrachten als Beispiel folgende Matrix: 0 1 A = 1 0
 Verschiedenes Exponieren einer Matrix Wir betrachten als Beispiel folgende Matrix: A = Man kann die Funktion f(a) einer Matrix A so berechnen, indem man auf die Reihendarstellung der Funktion f(x) zurückgeht.
Verschiedenes Exponieren einer Matrix Wir betrachten als Beispiel folgende Matrix: A = Man kann die Funktion f(a) einer Matrix A so berechnen, indem man auf die Reihendarstellung der Funktion f(x) zurückgeht.
Übungen zur Vorlesung Theoretische Chemie II Übungsblatt 1 SoSe 2015 Lösungen Ĥ Ψ = E Ψ (1) c b
 c b") Übungen zur Vorlesung Theoretische Chemie II Übungsblatt SoSe 205 Lösungen. H 2 + Molekülion a) Konstruieren Sie die Schrödingergleichung in Matrixdarstellung. Zunächst geht man von der stationären Schrödinger-Gleichung
Übungen zur Vorlesung Theoretische Chemie II Übungsblatt SoSe 205 Lösungen. H 2 + Molekülion a) Konstruieren Sie die Schrödingergleichung in Matrixdarstellung. Zunächst geht man von der stationären Schrödinger-Gleichung
Darstellungstheorie. Manfred Hörz
 Darstellungstheorie Manfred Hörz Die (lineare) Darstellungstheorie versucht schwer zu durchschauende Eigenschaften von gewissen Gruppen (oder Algebren) durch strukturerhaltende Abbildungen auf Matrizen,
Darstellungstheorie Manfred Hörz Die (lineare) Darstellungstheorie versucht schwer zu durchschauende Eigenschaften von gewissen Gruppen (oder Algebren) durch strukturerhaltende Abbildungen auf Matrizen,
C A R L V O N O S S I E T Z K Y. Transformationen. Johannes Diemke. Übung im Modul OpenGL mit Java Wintersemester 2010/2011
 C A R L V O N O S S I E T Z K Y Transformationen Johannes Diemke Übung im Modul OpenGL mit Java Wintersemester 2010/2011 Motivation Transformationen Sind Grundlage vieler Verfahren der Computergrafik Model-
C A R L V O N O S S I E T Z K Y Transformationen Johannes Diemke Übung im Modul OpenGL mit Java Wintersemester 2010/2011 Motivation Transformationen Sind Grundlage vieler Verfahren der Computergrafik Model-
2.9 Die komplexen Zahlen
 LinAlg II Version 1 3. April 2006 c Rudolf Scharlau 121 2.9 Die komplexen Zahlen Die komplexen Zahlen sind unverzichtbar für nahezu jede Art von höherer Mathematik. Systematisch gehören sie zum einen in
LinAlg II Version 1 3. April 2006 c Rudolf Scharlau 121 2.9 Die komplexen Zahlen Die komplexen Zahlen sind unverzichtbar für nahezu jede Art von höherer Mathematik. Systematisch gehören sie zum einen in
Kapitel 2: Mathematische Grundlagen
 [ Computeranimation ] Kapitel 2: Mathematische Grundlagen Prof. Dr. Stefan M. Grünvogel stefan.gruenvogel@fh-koeln.de Institut für Medien- und Phototechnik Fachhochschule Köln 2. Mathematische Grundlagen
[ Computeranimation ] Kapitel 2: Mathematische Grundlagen Prof. Dr. Stefan M. Grünvogel stefan.gruenvogel@fh-koeln.de Institut für Medien- und Phototechnik Fachhochschule Köln 2. Mathematische Grundlagen
Grundsätzliches Rechnen mit Matrizen Anwendungen. Matrizenrechnung. Fakultät Grundlagen. Juli 2015
 Matrizenrechnung Fakultät Grundlagen Juli 2015 Fakultät Grundlagen Matrizenrechnung Übersicht Grundsätzliches 1 Grundsätzliches Matrixbegriff Rechenregeln Spezielle Matrizen 2 Matrizenrechnung Determinanten
Matrizenrechnung Fakultät Grundlagen Juli 2015 Fakultät Grundlagen Matrizenrechnung Übersicht Grundsätzliches 1 Grundsätzliches Matrixbegriff Rechenregeln Spezielle Matrizen 2 Matrizenrechnung Determinanten
Da Atome viele ununterscheidbare Elektronen besitzen, sind ihre Zustände durch interelektronische Coulomb- und Austausch-Wechselwirkungen bestimmt.
 12 Moleküle Slide 267 Vorbemerkungen Da Atome viele ununterscheidbare Elektronen besitzen, sind ihre Zustände durch interelektronische Coulomb- und Austausch-Wechselwirkungen bestimmt. Je 2 Elektronen
12 Moleküle Slide 267 Vorbemerkungen Da Atome viele ununterscheidbare Elektronen besitzen, sind ihre Zustände durch interelektronische Coulomb- und Austausch-Wechselwirkungen bestimmt. Je 2 Elektronen
4 Lineare Abbildungen
 17. November 2008 34 4 Lineare Abbildungen 4.1 Lineare Abbildung: Eine Funktion f : R n R m heißt lineare Abbildung von R n nach R m, wenn für alle x 1, x 2 und alle α R gilt f(αx 1 ) = αf(x 1 ) f(x 1
17. November 2008 34 4 Lineare Abbildungen 4.1 Lineare Abbildung: Eine Funktion f : R n R m heißt lineare Abbildung von R n nach R m, wenn für alle x 1, x 2 und alle α R gilt f(αx 1 ) = αf(x 1 ) f(x 1
1.5 Kongruenz und Ähnlichkeit
 19 1.5 Kongruenz und Ähnlichkeit Definition Sei A n der affine Standardraum zum Vektorraum R n. Eine Abbildung F : A n A n heißt Isometrie, falls d(f (X), F (Y )) = d(x, Y ) für alle X, Y A n gilt. Es
19 1.5 Kongruenz und Ähnlichkeit Definition Sei A n der affine Standardraum zum Vektorraum R n. Eine Abbildung F : A n A n heißt Isometrie, falls d(f (X), F (Y )) = d(x, Y ) für alle X, Y A n gilt. Es
7. Wie lautet die Inverse der Verkettung zweier linearer Abbildungen? 9. Wie kann die Matrixdarstellung einer linearen Abbildung aufgestellt werden?
 Kapitel Lineare Abbildungen Verständnisfragen Sachfragen Was ist eine lineare Abbildung? Erläutern Sie den Zusammenhang zwischen Unterräumen, linearer Unabhängigkeit und linearen Abbildungen! 3 Was ist
Kapitel Lineare Abbildungen Verständnisfragen Sachfragen Was ist eine lineare Abbildung? Erläutern Sie den Zusammenhang zwischen Unterräumen, linearer Unabhängigkeit und linearen Abbildungen! 3 Was ist
KAPITEL 6. Algebra Gruppen
 KAPITEL 6 Algebra 6.. Gruppen Bekannt sind die Kongruenzklassen, bijektive Abbildungen, Permutationen. Wir hatten in diesen Fällen eine Verknüpfung auf einer Menge. (Addition bzw. Multiplikation bei den
KAPITEL 6 Algebra 6.. Gruppen Bekannt sind die Kongruenzklassen, bijektive Abbildungen, Permutationen. Wir hatten in diesen Fällen eine Verknüpfung auf einer Menge. (Addition bzw. Multiplikation bei den
Matrizen. Spezialfälle. Eine m nmatrix ist ein rechteckiges Zahlenschema mit. m Zeilen und n Spalten der Form. A = (a ij ) =
 =") Matrizen Eine m nmatrix ist ein rechteckiges Zahlenschema mit m Zeilen und n Spalten der Form a 11 a 12 a 1n A = a ij = a 21 a 22 a 2n a m1 a m2 a mn Dabei sind m und n natürliche und die Koezienten a
Matrizen Eine m nmatrix ist ein rechteckiges Zahlenschema mit m Zeilen und n Spalten der Form a 11 a 12 a 1n A = a ij = a 21 a 22 a 2n a m1 a m2 a mn Dabei sind m und n natürliche und die Koezienten a
Elemente der Gruppentheorie
 Elemente der Gruppentheorie Tobias Sudmann 06.11.2006 Rolle der Gruppentheorie in der Physik abstraktes mathematisches Modell Symmetriebegriff historisch: Harmonievorstellung bei Plato, Pythagoras, Kepler,...
Elemente der Gruppentheorie Tobias Sudmann 06.11.2006 Rolle der Gruppentheorie in der Physik abstraktes mathematisches Modell Symmetriebegriff historisch: Harmonievorstellung bei Plato, Pythagoras, Kepler,...