Linear Systems and Least Squares
|
|
|
- Elke Sachs
- vor 6 Jahren
- Abrufe
Transkript
1 Linear Systems and Least Squares Vortragender: Gelin Jiofack Nguedong Betreuer: Prof. Dr. Joachim Weickert Proseminar: Matrixmethoden in Datenanalyse und Mustererkennung Wintersemester 2015/ November
2 Übersicht Gaußsches Eliminationsverfahren Kondition Bandmatrix Methode der kleinsten Quadrate Literaturverzeichnis 18. November
3 Übersicht Gaußsches Eliminationsverfahren Kondition Bandmatrix Methode der kleinsten Quadrate Literaturverzeichnis 18. November


4 Gaußsches Eliminationsverfahren Algorithmus aus den mathematischen Teilgebieten der linearen Algebra und der Numerik. Carl Friedrich Gauß 18. November
5 Gaußsches Eliminationsverfahren Beispiel Pivotierung LR-Zerlegung Cholesky-Zerlegung 18. November
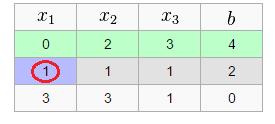
6 Beispiel Lineares Gleichungssystem Ax=b mit drei Gleichungen: Algorithmus zur Berechnung der Variablen x i : 1. Vorwärtselimination, 2. Rückwärtseinsetzen (Rücksubstitution). 18. November
7 Beispiel Zur besseren Übersichtlichkeit, erweiterte Koeffizientenmatrix Hinweis: Kontrolle durch Zeilensumme 18. November
8 Gaußsches Eliminationsverfahren Beispiel Pivotierung LR-Zerlegung Cholesky-Zerlegung 18. November


9 Pivotierung Im Allgemeinen nicht ohne Zeilenvertauschungen durchführbar. Beispiel: Ersetze 1 durch 0 Wie löse ich das??? 18. November



10 Pivotierung Ich weiß!!! 18. November
11 Gaußsches Eliminationsverfahren Beispiel Pivotierung LR-Zerlegung Cholesky-Zerlegung 18. November
12 LR-Zerlegung Lineares Gleichungssystem Ax=b mit LR-Zerlegung: 1. Zerlege A = L. R mit dem Gauß-Algorithmus 2. Löse Ax = LRx = b in zwei Schritten: Löse Ly = b durch Vorwärtssubstitution Löse Rx = y durch Rückwärtssubstitution Aufwand: Beispiel: das heißt 18. November
13 Gaußsches Eliminationsverfahren Beispiel Pivotierung LR-Zerlegung Cholesky-Zerlegung 18. November
 Positiv definite Matrix L untere Dreiecksmatrix mit Diagonalelemente = 1 D Diagonalmatrix mit positiven Einträgen 18.")
14 Cholesky-Zerlegung Zerlegung einer symmetrischen positiv definiten Matrix in ein Produkt aus einer unteren Dreiecksmatrix und deren Transponierter. (LR-Zerlegung ohne Pivotierung) Positiv definite Matrix L untere Dreiecksmatrix mit Diagonalelemente = 1 D Diagonalmatrix mit positiven Einträgen 18. November
15 Cholesky-Zerlegung Mit und Neue Formulierung der Cholesky-Zerlegung: Gleichungssystem Ax=b effizient durch Vorwärts- und Rückwärtseinsetzen lösbar: Durch Vorwärtseinsetzen Lösung des LGS Durch anschließendes Rückwärtseinsetzen Lösung des LGS 18. November
16 Cholesky-Zerlegung Berechnung Formeln Aufwand: 18. November
17 Cholesky-Zerlegung Beispiel: mit Durch Gleichsetzen der Matrixelemente folgt: Schließlich und 18. November
18 Übersicht Gaußsches Eliminationsverfahren Kondition Bandmatrix Methode der kleinsten Quadrate Literaturverzeichnis 18. November
19 Kondition Abhängigkeit der Lösung eines Problems von der Störung der Eingangsdaten. Abschätzung der Kondition von Matrizen durch die größtmögliche Verzerrung der Einheitskugel Vektoren ungleich 0 und auf die Null abgebildet, dann κ=. Für reguläre Matrizen unter Verwendung der natürlichen Matrixnorm: 18. November
20 Kondition Interpretation: Konditionszahl κ deutlich größer als 1 => Sonst, gut konditioniertes Problem Konditionszahl unendlich => schlecht gestelltes Problem schlecht konditioniertes Problem 18. November
21 Übersicht Gaußsches Eliminationsverfahren Kondition Bandmatrix Methode der kleinsten Quadrate Literaturverzeichnis 18. November
22 Bandmatrix Matrix mit bestimmter Anzahl Nebendiagonalen Elemente ungleich null neben der Hauptdiagonalen A Bandmatrix der Bandbreite w = p + q + 1, wenn für a ij gilt: 18. November
23 Bandmatrix Tridiagonalmatrix quadratische Matrix mit Hauptdiagonalen und zwei Nebendiagonalen Einträgen unglich null. (mit p = q = 1) 18. November
24 Übersicht Gaußsches Eliminationsverfahren Kondition Bandmatrix Methode der kleinsten Quadrate Literaturverzeichnis 18. November
25 Methode der kleinsten Quadrate Zu einer Datenpunktwolke eine Kurve möglichst nahe an den Datenpunkten. In der Stochastik als Schätzmethode in der Regressionsanalyse. Beispiel: 18. November
26 Übersicht Gaußsches Eliminationsverfahren Kondition Bandmatrix Methode der kleinsten Quadrate Literaturverzeichnis 18. November

27 Literaturverzeichnis Lars Elden: Matrix Methods in Data Mining and Pattern Recognition. SIAM, Philadelpia, Wikipedia Mathepedia November
28 Vielen Dank fur die Aufmerksamkeit 18. November
Lineare Gleichungssysteme und die Methode der kleinsten Quadrate
 Ludwig-Maximilians-Universität München Department für Computerlinguistik WS 2010/11 Hauptseminar Matrixmethoden in Textmining Dozent: Prof. Dr. Klaus Schulz Referentin: Sarah Söhlemann Lineare Gleichungssysteme
Ludwig-Maximilians-Universität München Department für Computerlinguistik WS 2010/11 Hauptseminar Matrixmethoden in Textmining Dozent: Prof. Dr. Klaus Schulz Referentin: Sarah Söhlemann Lineare Gleichungssysteme
Erweiterungen der LR-Zerlegung
 Prof. Thomas Richter 6. Juli 2017 Institut für Analysis und Numerik Otto-von-Guericke-Universität Magdeburg thomas.richter@ovgu.de Material zur Vorlesung Algorithmische Mathematik II am 06.07.2017 Erweiterungen
Prof. Thomas Richter 6. Juli 2017 Institut für Analysis und Numerik Otto-von-Guericke-Universität Magdeburg thomas.richter@ovgu.de Material zur Vorlesung Algorithmische Mathematik II am 06.07.2017 Erweiterungen
4. Großübung. Lösung linearer Gleichungssysteme
 4. Großübung Lösung linearer Gleichungssysteme Gesucht x, x, x 3, x 4 R, sodass gilt. mit A R 4 4, x R 4, b R 4 x x + 3x 3 + x 4 = 5 6x 3x 7x x 4 = 5 4x + 4x + 5x 3 5x 4 = 3 8x + x + x 3 + x 4 = 8 3 x
4. Großübung Lösung linearer Gleichungssysteme Gesucht x, x, x 3, x 4 R, sodass gilt. mit A R 4 4, x R 4, b R 4 x x + 3x 3 + x 4 = 5 6x 3x 7x x 4 = 5 4x + 4x + 5x 3 5x 4 = 3 8x + x + x 3 + x 4 = 8 3 x
Kondition linearer Gleichungssysteme Vorlesung vom
 Kondition linearer Gleichungssysteme Vorlesung vom 8.1.16 Konvergenz in normierten Räumen Definition: x (ν) x x x (ν) 0, für ν Satz: Die Konvergenz in R n und R n,n ist äquivalent zur komponentenweise
Kondition linearer Gleichungssysteme Vorlesung vom 8.1.16 Konvergenz in normierten Räumen Definition: x (ν) x x x (ν) 0, für ν Satz: Die Konvergenz in R n und R n,n ist äquivalent zur komponentenweise
Methode der kleinsten Quadrate
 Versus QR Matrizen mit vollem Rang 27. Mai 2011 Versus QR Inhaltsverzeichnis 1 2 3 Beispiel 4 Beispiel 5 6 Versus QR Kondition Vergleich Beispiel Versus QR Zu finden: Gerade, die den Punkten (0, 6), (1,
Versus QR Matrizen mit vollem Rang 27. Mai 2011 Versus QR Inhaltsverzeichnis 1 2 3 Beispiel 4 Beispiel 5 6 Versus QR Kondition Vergleich Beispiel Versus QR Zu finden: Gerade, die den Punkten (0, 6), (1,
Kapitel 2: Lineare Gleichungssysteme. 2.1 Motivation: Bildverarbeitung Sei B = (B(n, m)) ein N M stochastisches Feld mit ZVen
) ein N M stochastisches Feld mit ZVen") Kapitel 2: Lineare Gleichungssysteme 2.1 Motivation: Bildverarbeitung Sei B = (B(n, m)) ein N M stochastisches Feld mit ZVen B(n, m) : Ω {0,...,255}, n = 1,...,N, m = 1,...,M. dig. Camera Realisierung
Kapitel 2: Lineare Gleichungssysteme 2.1 Motivation: Bildverarbeitung Sei B = (B(n, m)) ein N M stochastisches Feld mit ZVen B(n, m) : Ω {0,...,255}, n = 1,...,N, m = 1,...,M. dig. Camera Realisierung
Cramersche Regel. Satz Es sei A R n n eine quadratische Matrix mit det(a) 0. Für ein LGS Ax = b sei. A j := (a 1,...,a j 1,b,a j+1,...
 0. Für ein LGS Ax = b sei. A j := (a 1,...,a j 1,b,a j+1,...") Cramersche Regel Satz 2.4. Es sei A R n n eine quadratische Matrix mit det(a) 0. Für ein LGS Ax = b sei A j := (a,...,a j,b,a j+,...,a n ) also die Matrix, die entsteht, wenn in A die j-spalte durch den
Cramersche Regel Satz 2.4. Es sei A R n n eine quadratische Matrix mit det(a) 0. Für ein LGS Ax = b sei A j := (a,...,a j,b,a j+,...,a n ) also die Matrix, die entsteht, wenn in A die j-spalte durch den
Numerik I. Universität zu Köln SS 2009 Mathematisches Institut Prof. Dr. C. Tischendorf Dr. M. Selva,
 Universität zu Köln SS 009 Mathematisches Institut Prof. Dr. C. Tischendorf Dr. M. Selva, mselva@math.uni-koeln.de Numerik I Musterlösung 1. praktische Aufgabe, Bandmatrizen Bei der Diskretisierung von
Universität zu Köln SS 009 Mathematisches Institut Prof. Dr. C. Tischendorf Dr. M. Selva, mselva@math.uni-koeln.de Numerik I Musterlösung 1. praktische Aufgabe, Bandmatrizen Bei der Diskretisierung von
Matrixzerlegungen. 6. Vorlesung Numerische Methoden I. Clemens Brand. 2. April Nachträge und Wiederholung. Links-Rechts- Zerlegung
 Matrixzerlegungen. 6. Vorlesung 170004 Numerische Methoden I Clemens Brand QR- QR- 2. April 2009 Gliederung Elimination faktorisiert A = L R QR- QR- QR- QR- Eine Zusammenfassung der Folien 6 14 der letzten
Matrixzerlegungen. 6. Vorlesung 170004 Numerische Methoden I Clemens Brand QR- QR- 2. April 2009 Gliederung Elimination faktorisiert A = L R QR- QR- QR- QR- Eine Zusammenfassung der Folien 6 14 der letzten
bekannt: Eliminationsverfahren von Gauß Verfahren führt zu einer Zerlegung der Koeffizientenmatrix: A = LR A = LR
 LR-Zerlegung bekannt: Eliminationsverfahren von Gauß Verfahren führt zu einer Zerlegung der Koeffizientenmatrix: A = LR Definition 2.17 Unter einer LR-Zerlegung einer Matrix A R n n verstehen wir eine
LR-Zerlegung bekannt: Eliminationsverfahren von Gauß Verfahren führt zu einer Zerlegung der Koeffizientenmatrix: A = LR Definition 2.17 Unter einer LR-Zerlegung einer Matrix A R n n verstehen wir eine
Numerik für Informatiker und Bioinformatiker. Daniel Weiß
 Numerik für Informatiker und Bioinformatiker Daniel Weiß SS 202 Folgende Literatur bildet die Grundlage dieser Vorlesung: P Deuflhard, A Hohmann, Numerische Mathematik, Eine algorithmisch orientierte Einführung,
Numerik für Informatiker und Bioinformatiker Daniel Weiß SS 202 Folgende Literatur bildet die Grundlage dieser Vorlesung: P Deuflhard, A Hohmann, Numerische Mathematik, Eine algorithmisch orientierte Einführung,
Gliederung. Links-Rechts-Zerlegung Elimination faktorisiert A = L R. Determinante Inverse. Kleinste Quadrate. Lösung durch. Links-Rechts- Zerlegung
 Matrixzerlegungen. 7. Vorlesung 170004 Numerische Methoden I Clemens Brand 29. April 2010 Gliederung Elimination faktorisiert A = L R Die A = L R Faktorisieren: Zerlege A in ein Produkt (einfacherer) Angenommen,
Matrixzerlegungen. 7. Vorlesung 170004 Numerische Methoden I Clemens Brand 29. April 2010 Gliederung Elimination faktorisiert A = L R Die A = L R Faktorisieren: Zerlege A in ein Produkt (einfacherer) Angenommen,
Numerische Lineare Algebra Spezielle Systeme
 Numerische Lineare Algebra Spezielle Systeme Friedrich Solowjow 2. Mai 2012, Bonn 1 / 34 1 Einleitung Übersicht Definitionen 2 3 Datenzugriff Speichertechniken 2 / 34 Übersicht Definitionen Gliederung
Numerische Lineare Algebra Spezielle Systeme Friedrich Solowjow 2. Mai 2012, Bonn 1 / 34 1 Einleitung Übersicht Definitionen 2 3 Datenzugriff Speichertechniken 2 / 34 Übersicht Definitionen Gliederung
Rechenaufwand der LR- und LDL T - Zerlegung
 6. Großübung Rechenaufwand der LR- und LDL T - Zerlegung Rückwärtseinsetzen Der Algorithmus kann der Folie 3.0 entnommen werden. Dieser kann in die folgenden Rechenoperationen aufgesplittet werden: Für
6. Großübung Rechenaufwand der LR- und LDL T - Zerlegung Rückwärtseinsetzen Der Algorithmus kann der Folie 3.0 entnommen werden. Dieser kann in die folgenden Rechenoperationen aufgesplittet werden: Für
MAV-NUM Applied Numerics Frühlingssemester Serie 4. (a) Berechnen Sie per Hand die LR-Zerlegung der Matrix
 Berechnen Sie per Hand die LR-Zerlegung der Matrix") MAV-NUM Applied Numerics Frühlingssemester 08 Dr. Evelyne Knapp ZHAW Winterthur Serie 4 Aufgabe (LR Zerlegung Theorie): (a) Berechnen Sie per Hand die LR-Zerlegung der Matrix 3 0 0 0 (b) Lösen Sie mit
MAV-NUM Applied Numerics Frühlingssemester 08 Dr. Evelyne Knapp ZHAW Winterthur Serie 4 Aufgabe (LR Zerlegung Theorie): (a) Berechnen Sie per Hand die LR-Zerlegung der Matrix 3 0 0 0 (b) Lösen Sie mit
Lineare Gleichungssysteme: direkte Verfahren
 Sechste Vorlesung, 24. April 2008, Inhalt Lineare Gleichungssysteme: direkte Verfahren Dreiecksmatrizen Gauß-Elimination LR-Zerlegung Anwendungen: Determinante, Inverse 1 Lösungsverfahren für lineare Gleichungssysteme
Sechste Vorlesung, 24. April 2008, Inhalt Lineare Gleichungssysteme: direkte Verfahren Dreiecksmatrizen Gauß-Elimination LR-Zerlegung Anwendungen: Determinante, Inverse 1 Lösungsverfahren für lineare Gleichungssysteme
Lineare Algebra. 5. Übungsstunde. Steven Battilana. battilana.uk/teaching
 Lineare Algebra. Übungsstunde Steven Battilana stevenb@student.ethz.ch battilana.uk/teaching October 2, 207 Erinnerung Definition. Ein Skalarprodukt ist eine Abbildung, : E n E n E, v, w v, w = n k= v
Lineare Algebra. Übungsstunde Steven Battilana stevenb@student.ethz.ch battilana.uk/teaching October 2, 207 Erinnerung Definition. Ein Skalarprodukt ist eine Abbildung, : E n E n E, v, w v, w = n k= v
Lineare Gleichungssysteme, LR-Zerlegung
 Prof Thomas Richter 2 Juni 27 Institut für Analysis und Numerik Otto-von-Guericke-Universität Magdeburg thomasrichter@ovgude Material zur Vorlesung Algorithmische Mathematik II am 22627 Lineare Gleichungssysteme,
Prof Thomas Richter 2 Juni 27 Institut für Analysis und Numerik Otto-von-Guericke-Universität Magdeburg thomasrichter@ovgude Material zur Vorlesung Algorithmische Mathematik II am 22627 Lineare Gleichungssysteme,
A2.3 Lineare Gleichungssysteme
 A2.3 Lineare Gleichungssysteme Schnittpunkte von Graphen Bereits weiter oben wurden die Schnittpunkte von Funktionsgraphen mit den Koordinatenachsen besprochen. Wenn sich zwei Geraden schneiden, dann müssen
A2.3 Lineare Gleichungssysteme Schnittpunkte von Graphen Bereits weiter oben wurden die Schnittpunkte von Funktionsgraphen mit den Koordinatenachsen besprochen. Wenn sich zwei Geraden schneiden, dann müssen
Kurztest zur Numerik I WiR AG, Dep. Mathematik, NT-Fakultät, Universität Siegen
 Kurztest zur Numerik I WiR AG, Dep. Mathematik, NT-Fakultät, Universität Siegen Wintersemester 2012/201 Zwischentest Teil 1: 1. Was bedeuten die Bezeichnungen O(h) und o(h)? (Definition) (siehe Skript!)
Kurztest zur Numerik I WiR AG, Dep. Mathematik, NT-Fakultät, Universität Siegen Wintersemester 2012/201 Zwischentest Teil 1: 1. Was bedeuten die Bezeichnungen O(h) und o(h)? (Definition) (siehe Skript!)
Numerisches Programmieren, Übungen
 Technische Universität München SoSe 8 Institut für Informatik Prof. Dr. Thomas Huckle Michael Rippl Fabio Gratl Numerisches Programmieren, Übungen Musterlösung 3. Übungsblatt: Gaußelimination mit Pivotsuche,
Technische Universität München SoSe 8 Institut für Informatik Prof. Dr. Thomas Huckle Michael Rippl Fabio Gratl Numerisches Programmieren, Übungen Musterlösung 3. Übungsblatt: Gaußelimination mit Pivotsuche,
Lineares Gleichungssystem
 Lineares Gleichungssystem Ein System von m linearen Gleichungen in n Unbekannten besteht aus einer Menge von algebraischen Relationen der Form n a ij x j = b i, i =,...,m, j= wobei a ij R, i m, j n, die
Lineares Gleichungssystem Ein System von m linearen Gleichungen in n Unbekannten besteht aus einer Menge von algebraischen Relationen der Form n a ij x j = b i, i =,...,m, j= wobei a ij R, i m, j n, die
Numerische Lineare Algebra
 Numerische Lineare Algebra Vorlesung 5 Prof. Dr. Klaus Höllig Institut für Mathematischen Methoden in den Ingenieurwissenschaften, Numerik und Geometrische Modellierung SS 21 Prof. Dr. Klaus Höllig (IMNG)
Numerische Lineare Algebra Vorlesung 5 Prof. Dr. Klaus Höllig Institut für Mathematischen Methoden in den Ingenieurwissenschaften, Numerik und Geometrische Modellierung SS 21 Prof. Dr. Klaus Höllig (IMNG)
Kapitel 2: Lineare Gleichungssysteme. 2.1 Motivation: Bildverarbeitung Sei B = (B(n, m)) ein N M stochastisches Feld mit ZVen
) ein N M stochastisches Feld mit ZVen") Kapitel 2: Lineare Gleichungssysteme 21 Motivation: Bildverarbeitung Sei B = (B(n, m)) ein N M stochastisches Feld mit ZVen B(n, m) : Ω {0,,255}, n = 1,,N, m = 1,,M dig Camera Realisierung von B η ist
Kapitel 2: Lineare Gleichungssysteme 21 Motivation: Bildverarbeitung Sei B = (B(n, m)) ein N M stochastisches Feld mit ZVen B(n, m) : Ω {0,,255}, n = 1,,N, m = 1,,M dig Camera Realisierung von B η ist
2 Direkte Lösungsverfahren für lineare Gleichungen
 (2.1) Sei x = (x n ) n=1,...,n R N, A = (a m,n ) m=1,...,m, n=1,...,n R M,N. a) Sei 1 m n N. Dann ist x[m : n] = (x k ) k=m,...,n R 1+n m Teilvektor von x. b) Seien 1 m 1 m 2 M, 1 n 1 n 2 N. Dann ist A[m
(2.1) Sei x = (x n ) n=1,...,n R N, A = (a m,n ) m=1,...,m, n=1,...,n R M,N. a) Sei 1 m n N. Dann ist x[m : n] = (x k ) k=m,...,n R 1+n m Teilvektor von x. b) Seien 1 m 1 m 2 M, 1 n 1 n 2 N. Dann ist A[m
Cramersche Regel. Satz 2.26
 ramersche Regel Satz 6 Es sei A R n n eine quadratische Matrix mit det(a) 6= Für das LGS Ax = b sei A j := (a,,a j, b, a j+,,a n ), also die Matrix, die entsteht, wenn in A die j-te Spalte durch den Vektor
ramersche Regel Satz 6 Es sei A R n n eine quadratische Matrix mit det(a) 6= Für das LGS Ax = b sei A j := (a,,a j, b, a j+,,a n ), also die Matrix, die entsteht, wenn in A die j-te Spalte durch den Vektor
Der Gaußsche Algorithmus und Varianten Vorlesung vom
 Der Gaußsche Algorithmus und Varianten Vorlesung vom 19.1.18 Gaußsche Elimination und Rückwärtssubstitution: Motivation am Beispiel, Verallgemeinerung und Algorithmus. Achtung: Durchführbarkeit nur bei
Der Gaußsche Algorithmus und Varianten Vorlesung vom 19.1.18 Gaußsche Elimination und Rückwärtssubstitution: Motivation am Beispiel, Verallgemeinerung und Algorithmus. Achtung: Durchführbarkeit nur bei
Lineare Algebra und Numerische Mathematik für D-BAUG
 R. Käppeli L. Herrmann W. Wu Herbstsemester 2016 Lineare Algebra und Numerische Mathematik für D-BAUG ETH Zürich D-MATH Beispiellösung für Serie 6 Aufgabe 6.1 Berechnen Sie die Determinanten der beiden
R. Käppeli L. Herrmann W. Wu Herbstsemester 2016 Lineare Algebra und Numerische Mathematik für D-BAUG ETH Zürich D-MATH Beispiellösung für Serie 6 Aufgabe 6.1 Berechnen Sie die Determinanten der beiden
Klausur Numerische Mathematik (für Elektrotechniker), Samstag, 19. August 2017
, Samstag, 19. August 2017") Verständnisfragen-Teil (5 Punkte) Jeder der 5 Verständnisfragenblöcke besteht aus 5 Verständnisfragen. Werden alle 5 Fragen in einem Verständnisfragenblock richtig beantwortet, so gibt es für diesen Block
Verständnisfragen-Teil (5 Punkte) Jeder der 5 Verständnisfragenblöcke besteht aus 5 Verständnisfragen. Werden alle 5 Fragen in einem Verständnisfragenblock richtig beantwortet, so gibt es für diesen Block
2. Lineare Gleichungssysteme: direkte und iterative Lösungsverfahren
 2. Lineare Gleichungssysteme: direkte und iterative Lösungsverfahren Problem (P2): Löse Ax = b, A R n und b R. 2.1 Satz: Die folgenden Aussagen sind äquivalent: (i) Ax = b ist für jedes b eindeutig lösbar;
2. Lineare Gleichungssysteme: direkte und iterative Lösungsverfahren Problem (P2): Löse Ax = b, A R n und b R. 2.1 Satz: Die folgenden Aussagen sind äquivalent: (i) Ax = b ist für jedes b eindeutig lösbar;
Remarks on Floating Points
 Remarks on Floating Points Prof. Dr. Jian-Jia Chen Department of Computer Science, Chair 2 TU Dortmund University, Germany October 3, 208 (based on the slides from Sedgewick and Wayne from University of
Remarks on Floating Points Prof. Dr. Jian-Jia Chen Department of Computer Science, Chair 2 TU Dortmund University, Germany October 3, 208 (based on the slides from Sedgewick and Wayne from University of
Direkte Verfahren für Lineare Gleichungssysteme
 Kapitel 1 Direkte Verfahren für Lineare Gleichungssysteme 11 Einführung (mündlich) 12 Das Gaußsche Eliminationsverfahren Es sei A IK n n eine invertierbare Matrix und b IK n ein gegebener Vektor Gesucht
Kapitel 1 Direkte Verfahren für Lineare Gleichungssysteme 11 Einführung (mündlich) 12 Das Gaußsche Eliminationsverfahren Es sei A IK n n eine invertierbare Matrix und b IK n ein gegebener Vektor Gesucht
Numerisches Programmieren, Übungen
 Technische Universität München WiSe 7 / 8 Institut für Informatik Univ.-Prof. Dr. Hans-Joachim Bungartz Michael Obersteiner Philipp Samfass Numerisches Programmieren, Übungen Musterlösung 8. Übungsblatt:
Technische Universität München WiSe 7 / 8 Institut für Informatik Univ.-Prof. Dr. Hans-Joachim Bungartz Michael Obersteiner Philipp Samfass Numerisches Programmieren, Übungen Musterlösung 8. Übungsblatt:
3 Direkte Verfahren zur Lösung linearer Gleichungssysteme
 Numerik I 97 3 Direkte Verfahren zur Lösung linearer Gleichungssysteme The simplest model in applied mathematics is a system of linear equations. It is also by far the most important... (Gilbert Strang,
Numerik I 97 3 Direkte Verfahren zur Lösung linearer Gleichungssysteme The simplest model in applied mathematics is a system of linear equations. It is also by far the most important... (Gilbert Strang,
Drehungen und Spiegelungen in R 2
 Drehungen und Spiegelungen in R 2 Ist A eine orthogonale 2 2-Matrix, so ist A von der Form ( ) cos α sin α A = Drehung um den Winkel α sin α cos α oder ( ) cos α sin α A = Spiegelung an Achse mit Steigung
Drehungen und Spiegelungen in R 2 Ist A eine orthogonale 2 2-Matrix, so ist A von der Form ( ) cos α sin α A = Drehung um den Winkel α sin α cos α oder ( ) cos α sin α A = Spiegelung an Achse mit Steigung
D-INFK Lineare Algebra HS 2017 Özlem Imamoglu Olga Sorkine-Hornung. Serie 11
 D-INFK Lineare Algebra HS 2017 Özlem Imamoglu Olga Sorkine-Hornung Serie 11 1. Wir betrachten das überbestimmte Gleichungssystem Ax = y mit 1 1 1 1 A := 1 1 0 1 0 1, y := 2 3 0 0 1 4 Berechnen Sie die
D-INFK Lineare Algebra HS 2017 Özlem Imamoglu Olga Sorkine-Hornung Serie 11 1. Wir betrachten das überbestimmte Gleichungssystem Ax = y mit 1 1 1 1 A := 1 1 0 1 0 1, y := 2 3 0 0 1 4 Berechnen Sie die
(d) das zu Grunde liegende Problem gut konditioniert ist.
 das zu Grunde liegende Problem gut konditioniert ist.") Aufgabe 0: (6 Punkte) Bitte kreuzen Sie die richtige Lösung an. Es ist jeweils genau eine Antwort korrekt. Für jede richtige Antwort erhalten Sie einen Punkt, für jede falsche Antwort wird Ihnen ein Punkt
Aufgabe 0: (6 Punkte) Bitte kreuzen Sie die richtige Lösung an. Es ist jeweils genau eine Antwort korrekt. Für jede richtige Antwort erhalten Sie einen Punkt, für jede falsche Antwort wird Ihnen ein Punkt
Practical Numerical Training UKNum
 Practical Numerical Training UKNum Lineare Gleichungssysteme Dr. H. Klahr & Dr. C. Mordasini Max Planck Institute für Astronomie, Heidelberg Programm: 1) Einführung 2) Gauss Elimination 3) Gauss mit Pivotisierung
Practical Numerical Training UKNum Lineare Gleichungssysteme Dr. H. Klahr & Dr. C. Mordasini Max Planck Institute für Astronomie, Heidelberg Programm: 1) Einführung 2) Gauss Elimination 3) Gauss mit Pivotisierung
Lineare Ausgleichsprobleme. Jetzt: Lösung überbestimmter linearer GS, d.h. mehr Gleichungen als Unbekannte
 Lineare Ausgleichsprobleme Bisher: Lösung linearer GS Ax = b, A R n,n, A regulär, b R n Jetzt: Lösung überbestimmter linearer GS, d.h. mehr Gleichungen als Unbekannte Ax = b mit A R m,n, b R m, m n, rg(a)
Lineare Ausgleichsprobleme Bisher: Lösung linearer GS Ax = b, A R n,n, A regulär, b R n Jetzt: Lösung überbestimmter linearer GS, d.h. mehr Gleichungen als Unbekannte Ax = b mit A R m,n, b R m, m n, rg(a)
1 Euklidische Approximation
 1 Euklidische Approximation Sei V ein reeller euklidischer Vektorraum. Das Skalarprodukt in V wird mit, V und die Norm mit V bezeichnet. V N V sei ein Teilraum der Dimension N < mit Basis {φ n } n=1,...,n.
1 Euklidische Approximation Sei V ein reeller euklidischer Vektorraum. Das Skalarprodukt in V wird mit, V und die Norm mit V bezeichnet. V N V sei ein Teilraum der Dimension N < mit Basis {φ n } n=1,...,n.
Lineare Gleichungssysteme und Matrizen
 Kapitel 11 Lineare Gleichungssysteme und Matrizen Ein lineares Gleichungssystem (lgs) mit m linearen Gleichungen in den n Unbekannten x 1, x 2,..., x n hat die Gestalt: Mit a 11 x 1 + a 12 x 2 + a 13 x
Kapitel 11 Lineare Gleichungssysteme und Matrizen Ein lineares Gleichungssystem (lgs) mit m linearen Gleichungen in den n Unbekannten x 1, x 2,..., x n hat die Gestalt: Mit a 11 x 1 + a 12 x 2 + a 13 x
Drehungen und Spiegelungen in R 2
 Drehungen und Spiegelungen in R 2 Ist A eine orthogonale 2 2-Matrix, so ist A von der Form ( ) cos α sin α A = Drehung um den Winkel α sin α cos α oder ( ) cos α sin α A = Spiegelung an Achse mit Steigung
Drehungen und Spiegelungen in R 2 Ist A eine orthogonale 2 2-Matrix, so ist A von der Form ( ) cos α sin α A = Drehung um den Winkel α sin α cos α oder ( ) cos α sin α A = Spiegelung an Achse mit Steigung
Numerisches Programmieren, Übungen
 Technische Universität München SoSe 3 Institut für Informatik Prof. Dr. Thomas Huckle Dipl.-Inf. Christoph Riesinger Dipl.-Math. Jürgen Bräckle Numerisches Programmieren, Übungen Musterlösung 3. Übungsblatt:
Technische Universität München SoSe 3 Institut für Informatik Prof. Dr. Thomas Huckle Dipl.-Inf. Christoph Riesinger Dipl.-Math. Jürgen Bräckle Numerisches Programmieren, Übungen Musterlösung 3. Übungsblatt:
Orthogonale Matrix. Definition 4.19
 Orthogonale Matrix Ausgleichsprobleme sind häufig schlecht konditioniert. Matrix des Normalengleichungssystems kann nahezu singulär sein. Spezielle Matrixzerlegung für höhere numerische Stabilität: QR-Zerlegung
Orthogonale Matrix Ausgleichsprobleme sind häufig schlecht konditioniert. Matrix des Normalengleichungssystems kann nahezu singulär sein. Spezielle Matrixzerlegung für höhere numerische Stabilität: QR-Zerlegung
Lineare Algebra. 10. Übungsstunde. Steven Battilana.
 Lineare Algebra. Übungsstunde Steven Battilana stevenb@student.ethz.ch November 3, 26 Erinnerung Gram-Schmidt Verfahren Sei V ein euklidischer/unitärer Vektorraum mit dim(v ) n < Gegeben: W span{v,...,
Lineare Algebra. Übungsstunde Steven Battilana stevenb@student.ethz.ch November 3, 26 Erinnerung Gram-Schmidt Verfahren Sei V ein euklidischer/unitärer Vektorraum mit dim(v ) n < Gegeben: W span{v,...,
4.2.3 LR-Zerlegung für diagonaldominante Matrizen
 4.2 Lösungsmethoden für lineare Gleichungssysteme 4.2.3 LR-Zerlegung für diagonaldominante Matrizen Satz 4.28 besagt, dass die LR-Zerlegung für beliebige reguläre Matrizen mit Pivotierung möglich ist.
4.2 Lösungsmethoden für lineare Gleichungssysteme 4.2.3 LR-Zerlegung für diagonaldominante Matrizen Satz 4.28 besagt, dass die LR-Zerlegung für beliebige reguläre Matrizen mit Pivotierung möglich ist.
Wirtschaftsmathematik Plus für International Management (BA) und Betriebswirtschaft (BA)
 und Betriebswirtschaft (BA)") Wirtschaftsmathematik Plus für International Management (BA) und Betriebswirtschaft (BA) Wintersemester 2012/13 Hochschule Augsburg Lineare : Einführung Beispiele linearer a) b) c) 2x 1 3x 2 = 1 x 1 +
Wirtschaftsmathematik Plus für International Management (BA) und Betriebswirtschaft (BA) Wintersemester 2012/13 Hochschule Augsburg Lineare : Einführung Beispiele linearer a) b) c) 2x 1 3x 2 = 1 x 1 +
Basiswissen Matrizen
 Basiswissen Matrizen Mathematik GK 32 Definition (Die Matrix) Eine Matrix A mit m Zeilen und n Spalten heißt m x n Matrix: a a 2 a 4 A a 2 a 22 a 24 a 4 a 42 a 44 Definition 2 (Die Addition von Matrizen)
Basiswissen Matrizen Mathematik GK 32 Definition (Die Matrix) Eine Matrix A mit m Zeilen und n Spalten heißt m x n Matrix: a a 2 a 4 A a 2 a 22 a 24 a 4 a 42 a 44 Definition 2 (Die Addition von Matrizen)
Institut für Geometrie und Praktische Mathematik
 RWTH Aachen Institut für Geometrie und Praktische Mathematik Multiple-Choice-Test NumaMB F08 (30 Punkte) Bei jeder MC-Aufgabe ist mindestens eine Aussage korrekt. Wird dennoch bei einer MC-Aufgabe keine
RWTH Aachen Institut für Geometrie und Praktische Mathematik Multiple-Choice-Test NumaMB F08 (30 Punkte) Bei jeder MC-Aufgabe ist mindestens eine Aussage korrekt. Wird dennoch bei einer MC-Aufgabe keine
Spezielle Matrixformen
 Definition B57 (Transposition) Eine einfache aber wichtige Operation auf Matrizen ist die Transposition, die aus einer (m n) Matrix A eine (n m) Matrix B = A T macht Hierbei gilt β i j = α j i, so daß
Definition B57 (Transposition) Eine einfache aber wichtige Operation auf Matrizen ist die Transposition, die aus einer (m n) Matrix A eine (n m) Matrix B = A T macht Hierbei gilt β i j = α j i, so daß
2 Lineare Gleichungssysteme
 Höhere Ableitungen Interpolationsbedingungen d k Φ dx k (x j) = y (k) j, ( j =,,..., n; k =,,..., c j ) bestimmen das Hermite Interpolationspolynom Φ Π r mit r + = n ( + c j ). j= 2 Lineare Gleichungssysteme
Höhere Ableitungen Interpolationsbedingungen d k Φ dx k (x j) = y (k) j, ( j =,,..., n; k =,,..., c j ) bestimmen das Hermite Interpolationspolynom Φ Π r mit r + = n ( + c j ). j= 2 Lineare Gleichungssysteme
Lösungsvorschlag zur Modulprüfung Numerische Methoden - Wintersemester 2016/17
 Institut für Analysis Prof Dr Michael Plum Lösungsvorschlag zur Modulprüfung Numerische Methoden - Wintersemester 6/7 837 Aufgabe Punkte): Gegeben sei das lineare Gleichungssystem Ax = b mit A = 6 3 und
Institut für Analysis Prof Dr Michael Plum Lösungsvorschlag zur Modulprüfung Numerische Methoden - Wintersemester 6/7 837 Aufgabe Punkte): Gegeben sei das lineare Gleichungssystem Ax = b mit A = 6 3 und
Lineare Algebra und Numerische Mathematik D-BAUG. Winter 2013 Prof. H.-R. Künsch. , a R. det(a) = 0 a = 1.
 = 0 a = 1.") b Musterlösung Lineare Algebra und Numerische Mathematik D-BAUG. Multiple Choice) Gegeben sei die folgende Matrix Winter 3 Prof. H.-R. Künsch A = a a) deta) = genau dann wenn gilt x a =. a =. ), a R. x
b Musterlösung Lineare Algebra und Numerische Mathematik D-BAUG. Multiple Choice) Gegeben sei die folgende Matrix Winter 3 Prof. H.-R. Künsch A = a a) deta) = genau dann wenn gilt x a =. a =. ), a R. x
Kapitel 2. Matrixalgebra. Josef Leydold Mathematik für VW WS 2017/18 2 Matrixalgebra 1 / 49
 Kapitel 2 Matrixalgebra Josef Leydold Mathematik für VW WS 2017/18 2 Matrixalgebra 1 / 49 Ein sehr einfaches Leontief-Modell Eine Stadt betreibt die Unternehmen ÖFFENTLICHER VERKEHR, ELEKTRIZITÄT und GAS.
Kapitel 2 Matrixalgebra Josef Leydold Mathematik für VW WS 2017/18 2 Matrixalgebra 1 / 49 Ein sehr einfaches Leontief-Modell Eine Stadt betreibt die Unternehmen ÖFFENTLICHER VERKEHR, ELEKTRIZITÄT und GAS.
Kapitel 2. Matrixalgebra. Josef Leydold Mathematik für VW WS 2017/18 2 Matrixalgebra 1 / 49
 Kapitel 2 Matrixalgebra Josef Leydold Mathematik für VW WS 207/8 2 Matrixalgebra / 49 Ein sehr einfaches Leontief-Modell Eine Stadt betreibt die Unternehmen ÖFFENTLICHER VERKEHR, ELEKTRIZITÄT und GAS.
Kapitel 2 Matrixalgebra Josef Leydold Mathematik für VW WS 207/8 2 Matrixalgebra / 49 Ein sehr einfaches Leontief-Modell Eine Stadt betreibt die Unternehmen ÖFFENTLICHER VERKEHR, ELEKTRIZITÄT und GAS.
Matrixalgebra. Kapitel 2. Ein sehr einfaches Leontief-Modell. Matrix. Ein sehr einfaches Leontief-Modell. Vektor. Spezielle Matrizen I
 Ein sehr einfaches Leontief-Modell Eine Stadt betreibt die Unternehmen ÖFFENTLICHER VERKEHR, ELEKTRIZITÄT und GAS Kapitel 2 Matrixalgebra Technologiematrix und wöchentliche Nachfrage (in Werteinheiten):
Ein sehr einfaches Leontief-Modell Eine Stadt betreibt die Unternehmen ÖFFENTLICHER VERKEHR, ELEKTRIZITÄT und GAS Kapitel 2 Matrixalgebra Technologiematrix und wöchentliche Nachfrage (in Werteinheiten):
MODULPRÜFUNG Numerische Methoden (Elektrotechnik, Meteorologie, Geodäsie und Geoinformatik)
") Karlsruher Institut für Technologie KIT) Institut für Analysis Dr. S. Wugalter Herbst 7.9.7 MODULPRÜFUNG Numerische Methoden Elektrotechnik, Meteorologie, Geodäsie und Geoinformatik) Aufgabe 4 Punkte)
Karlsruher Institut für Technologie KIT) Institut für Analysis Dr. S. Wugalter Herbst 7.9.7 MODULPRÜFUNG Numerische Methoden Elektrotechnik, Meteorologie, Geodäsie und Geoinformatik) Aufgabe 4 Punkte)
5 Lineare Gleichungssysteme und Determinanten
 5 Lineare Gleichungssysteme und Determinanten 51 Lineare Gleichungssysteme Definition 51 Bei einem linearen Gleichungssystem (LGS) sind n Unbekannte x 1, x 2,, x n so zu bestimmen, dass ein System von
5 Lineare Gleichungssysteme und Determinanten 51 Lineare Gleichungssysteme Definition 51 Bei einem linearen Gleichungssystem (LGS) sind n Unbekannte x 1, x 2,, x n so zu bestimmen, dass ein System von
2 Lineare Gleichungssysteme
 2 Lineare Gleichungssysteme Wir betrachten das lineare Gleichungssystem Ax = b mit der n n-koeffizientenmatrix A und der rechten Seite b R n. Wir leiten zuerst eine Variante des Gauss-Algorithmus (LR-Zerlegung)
2 Lineare Gleichungssysteme Wir betrachten das lineare Gleichungssystem Ax = b mit der n n-koeffizientenmatrix A und der rechten Seite b R n. Wir leiten zuerst eine Variante des Gauss-Algorithmus (LR-Zerlegung)
3 Lineare Gleichungssysteme
 Lineare Gleichungssysteme Wir wissen bereits, dass ein lineares Gleichungssystem genau dann eindeutig lösbar ist, wenn die zugehörige Matrix regulär ist. In diesem Kapitel lernen wir unterschiedliche Verfahren
Lineare Gleichungssysteme Wir wissen bereits, dass ein lineares Gleichungssystem genau dann eindeutig lösbar ist, wenn die zugehörige Matrix regulär ist. In diesem Kapitel lernen wir unterschiedliche Verfahren
7. Übungs-/Wiederholungsblatt zu Einführung in die Numerik (SS 2012)
") Technische Universität München Zentrum Mathematik, M1 Prof. Dr. Boris Vexler Dr. Ira Neitzel Dipl.-Math. Alana Kirchner 7. Übungs-/Wiederholungsblatt zu Einführung in die Numerik (SS 2012) Diese Auswahl
Technische Universität München Zentrum Mathematik, M1 Prof. Dr. Boris Vexler Dr. Ira Neitzel Dipl.-Math. Alana Kirchner 7. Übungs-/Wiederholungsblatt zu Einführung in die Numerik (SS 2012) Diese Auswahl
Lineare Gleichungssysteme. 1-E Ma 1 Lubov Vassilevskaya
 Lineare Gleichungssysteme 1-E Ma 1 Lubov Vassilevskaya Systeme linearer Funktionen und Gleichungen y = a 1 a 2... a n lineare Funktion Funktion ersten Grades,,..., unabhängige Variablen y abhängige Variable
Lineare Gleichungssysteme 1-E Ma 1 Lubov Vassilevskaya Systeme linearer Funktionen und Gleichungen y = a 1 a 2... a n lineare Funktion Funktion ersten Grades,,..., unabhängige Variablen y abhängige Variable
Der Gaußsche Algorithmus und Varianten Vorlesung vom
 Der Gaußsche Algorithmus und Varianten Vorlesung vom 17114 Gaußsche Elimination und Rückwärtssubstitution: Motivation am Beispiel, Verallgemeinerung und Algorithmus Achtung: Durchführbarkeit nur bei nichtverschwindenden
Der Gaußsche Algorithmus und Varianten Vorlesung vom 17114 Gaußsche Elimination und Rückwärtssubstitution: Motivation am Beispiel, Verallgemeinerung und Algorithmus Achtung: Durchführbarkeit nur bei nichtverschwindenden
Beginn der Vorlesung zur Numerik I (Wintersemester 2010/2011)
") M. Sc. Frank Gimbel Beginn der Vorlesung zur Numerik I (Wintersemester 2010/2011) 1 Motivation Ziel ist es, ein gegebenes lineares Gleichungssystem der Form Ax = b (1) mit x, b R n und A R n n zu lösen.
M. Sc. Frank Gimbel Beginn der Vorlesung zur Numerik I (Wintersemester 2010/2011) 1 Motivation Ziel ist es, ein gegebenes lineares Gleichungssystem der Form Ax = b (1) mit x, b R n und A R n n zu lösen.
Lineare Gleichungssysteme
 Lineare Gleichungssysteme Beispiel: Feder Masse System festes Ende Feder k 1 Masse m 1 k 2 m 2 k 3 m 3 k 4 festes Ende u 0 = 0 Federkraft y 1 Verschiebung u 1 y 2 u 2 y 3 u 3 y 4 u 4 = 0 Grundlagen der
Lineare Gleichungssysteme Beispiel: Feder Masse System festes Ende Feder k 1 Masse m 1 k 2 m 2 k 3 m 3 k 4 festes Ende u 0 = 0 Federkraft y 1 Verschiebung u 1 y 2 u 2 y 3 u 3 y 4 u 4 = 0 Grundlagen der
 Lösung der Diplom-Vorprüfung Höhere Mathematik III/IV 6.8.005 1 Aufgabe N1 Gegeben seien A = 5-10 -5-10 8-10 -5-10 13 R 3 3 und b = a) Überprüfen Sie, ob die Matrix A positiv definit ist. b) Bestimmen
Lösung der Diplom-Vorprüfung Höhere Mathematik III/IV 6.8.005 1 Aufgabe N1 Gegeben seien A = 5-10 -5-10 8-10 -5-10 13 R 3 3 und b = a) Überprüfen Sie, ob die Matrix A positiv definit ist. b) Bestimmen
EINFÜHRUNG IN DIE NUMERIK - ÜBUNGSBLATT 3 Sommersemester 2010
 Prof. Dr. O. Junge, P. Koltai, K. Tichmann Zentrum Mathematik - M3 Technische Universität München EINFÜHRUNG IN DIE NUMERIK - ÜBUNGSBLATT 3 Sommersemester 2 Tutorübungen T6 (Schur-Komplement) (a) Es sei
Prof. Dr. O. Junge, P. Koltai, K. Tichmann Zentrum Mathematik - M3 Technische Universität München EINFÜHRUNG IN DIE NUMERIK - ÜBUNGSBLATT 3 Sommersemester 2 Tutorübungen T6 (Schur-Komplement) (a) Es sei
Lösung Semesterendprüfung
 MNUM Mathematik: Numerische Methoden Herbstsemester 17 Dr Christoph Kirsch ZHAW Winterthur Aufgabe 1 : Lösung Semesterendprüfung Wir schreiben zuerst die Gleichungen f(x i ; a, a 1, a y i, i 1,,, 1, als
MNUM Mathematik: Numerische Methoden Herbstsemester 17 Dr Christoph Kirsch ZHAW Winterthur Aufgabe 1 : Lösung Semesterendprüfung Wir schreiben zuerst die Gleichungen f(x i ; a, a 1, a y i, i 1,,, 1, als
Basistext Determinanten
 Basistext Determinanten Definition In der Linearen Algebra ist die Determinante eine Funktion die einer quadratischen Matrix eine Zahl zuordnet. Die Funktion wird mit det abgekürzt. Die runden Matrixklammern
Basistext Determinanten Definition In der Linearen Algebra ist die Determinante eine Funktion die einer quadratischen Matrix eine Zahl zuordnet. Die Funktion wird mit det abgekürzt. Die runden Matrixklammern
Diplom VP Numerik 28. August 2006
 Diplom VP Numerik 8. August 6 Multiple-Choice-Test Punkte) Bei jeder MC-Aufgabe ist mindestens eine Aussage korrekt. Wird dennoch bei einer MC-Aufgabe keine einzige Aussage angekreuzt, gilt diese Aufgabe
Diplom VP Numerik 8. August 6 Multiple-Choice-Test Punkte) Bei jeder MC-Aufgabe ist mindestens eine Aussage korrekt. Wird dennoch bei einer MC-Aufgabe keine einzige Aussage angekreuzt, gilt diese Aufgabe
Matrizenoperationen mit FORTRAN
 Kapitel 2 Matrizenoperationen mit FORTRAN 21 Grundlagen Bei vielen Anwendungen müssen große zusammenhängende Datenmengen gespeichert und verarbeitet werden Deshalb ist es sinnvoll, diese Daten nicht als
Kapitel 2 Matrizenoperationen mit FORTRAN 21 Grundlagen Bei vielen Anwendungen müssen große zusammenhängende Datenmengen gespeichert und verarbeitet werden Deshalb ist es sinnvoll, diese Daten nicht als
Multiplikationen und Divisionen Hauptarbeit des Algorithmus liegt somit in der Berechnung der LR-Zerlegung. (n 1)n(2n 1) 6. = n3 3 n2.
n(2n 1) 6. = n3 3 n2.") KAPITEL LINEARE GLEICHUNGSSYSTEME 7 Rechenaufwand der LR-Zerlegung: A A : n Divisionen, n 2 Multiplikationen und Additionen A L, R: Also insgesamt n j= j2 + j = n3 3 n 3 Multiplikationen und Divisionen
KAPITEL LINEARE GLEICHUNGSSYSTEME 7 Rechenaufwand der LR-Zerlegung: A A : n Divisionen, n 2 Multiplikationen und Additionen A L, R: Also insgesamt n j= j2 + j = n3 3 n 3 Multiplikationen und Divisionen
Matrizen und Determinanten
 Matrizen und Determinanten 1 Matrizen und Determinanten 1 Einführung in den Matrizenbegriff Zur Beschreibung und Lösung vieler physikalischer Probleme ist die Vektorrechnung vonnöten Durch Verwendung von
Matrizen und Determinanten 1 Matrizen und Determinanten 1 Einführung in den Matrizenbegriff Zur Beschreibung und Lösung vieler physikalischer Probleme ist die Vektorrechnung vonnöten Durch Verwendung von
Algorithmen und Datenstrukturen (für ET/IT)
") Algorithmen und Datenstrukturen (für ET/IT) Sommersemester 2015 Dr. Tobias Lasser Computer Aided Medical Procedures Technische Universität München Programm heute 7 Fortgeschrittene Datenstrukturen 8 Such-Algorithmen
Algorithmen und Datenstrukturen (für ET/IT) Sommersemester 2015 Dr. Tobias Lasser Computer Aided Medical Procedures Technische Universität München Programm heute 7 Fortgeschrittene Datenstrukturen 8 Such-Algorithmen
Kapitel 2: Lineare Gleichungssysteme
 Vorlesung Höhere Mathematik: Numerik (für Ingenieure) Kapitel 2: Lineare Gleichungssysteme Jun.-Prof. Dr. Stephan Trenn AG Technomathematik, TU Kaiserslautern Sommersemester 205 HM: Numerik (SS 205), Kapitel
Vorlesung Höhere Mathematik: Numerik (für Ingenieure) Kapitel 2: Lineare Gleichungssysteme Jun.-Prof. Dr. Stephan Trenn AG Technomathematik, TU Kaiserslautern Sommersemester 205 HM: Numerik (SS 205), Kapitel
Der Gaußsche Algorithmus und Varianten Vorlesung vom
 Der Gaußsche Algorithmus und Varianten Vorlesung vom 15.1.16 Gaußsche Elimination und Rückwärtssubstitution: Motivation am Beispiel, Verallgemeinerung und Algorithmus. Achtung: Durchführbarkeit nur bei
Der Gaußsche Algorithmus und Varianten Vorlesung vom 15.1.16 Gaußsche Elimination und Rückwärtssubstitution: Motivation am Beispiel, Verallgemeinerung und Algorithmus. Achtung: Durchführbarkeit nur bei
Inhaltsverzeichnis. 1. Matrizen ZUSAMMENFASSUNG - LINEARE ALGEBRA 1 MATRIZEN
 ZUSAMMENFASSUNG - LINEARE ALGEBRA 1 MATRIZEN Inhaltsverzeichnis 1 Matrizen 1 Matrizen 1 11 Spezielle Matrizen 1 1 Rechnen mit Matrizen 1 13 Symmetrische und Hermitesche Matrizen 14 Inverse einer Matrix
ZUSAMMENFASSUNG - LINEARE ALGEBRA 1 MATRIZEN Inhaltsverzeichnis 1 Matrizen 1 Matrizen 1 11 Spezielle Matrizen 1 1 Rechnen mit Matrizen 1 13 Symmetrische und Hermitesche Matrizen 14 Inverse einer Matrix
PS Numerische Mathematik für LAK WS 08/09, LV-Nr.: , HS Übungsblatt (bis )
") . Übungsblatt (bis 5.0.2008). Aufgabe. Skizzieren Sie die Einheitskugeln K (0,) im R 2 für die Normen, 2 und. 2. Aufgabe. Beweisen Sie x x 2 n x für alle x R n. 3. Aufgabe. Bestimmen Sie die relative Konditionszahl
. Übungsblatt (bis 5.0.2008). Aufgabe. Skizzieren Sie die Einheitskugeln K (0,) im R 2 für die Normen, 2 und. 2. Aufgabe. Beweisen Sie x x 2 n x für alle x R n. 3. Aufgabe. Bestimmen Sie die relative Konditionszahl
D-INFK Lineare Algebra HS 2018 Özlem Imamoglu Olga Sorkine-Hornung. Musterlösung 5
 D-INFK Lineare Algebra HS 2018 Özlem Imamoglu Olga Sorkine-Hornung Musterlösung 5 1. a) 1 0 0 1 3 5 LR = 0 1 0 2 6 7 0 0 1 3 10 10 1 0 0 1 3 5 = 2 1 0 0 0 3 3 0 1 0 1 5 1 0 0 1 3 5 1 0 0 = 3 1 0 0 1 5,
D-INFK Lineare Algebra HS 2018 Özlem Imamoglu Olga Sorkine-Hornung Musterlösung 5 1. a) 1 0 0 1 3 5 LR = 0 1 0 2 6 7 0 0 1 3 10 10 1 0 0 1 3 5 = 2 1 0 0 0 3 3 0 1 0 1 5 1 0 0 1 3 5 1 0 0 = 3 1 0 0 1 5,
6 Numerische Verfahren zur Lösung linearer Gleichungssysteme
 Numerische Mathematik für ingenieurwissenschaftliche Studiengänge 208 6 Numerische Verfahren zur Lösung linearer Gleichungssysteme The simplest model in applied mathematics is a system of linear equations.
Numerische Mathematik für ingenieurwissenschaftliche Studiengänge 208 6 Numerische Verfahren zur Lösung linearer Gleichungssysteme The simplest model in applied mathematics is a system of linear equations.
1.4 Stabilität der Gauß-Elimination
 KAPIEL 1. LINEARE GLEICHUNGSSYSEME 18 1.4 Stabilität der Gauß-Elimination Bezeichne x die exakte Lösung von Ax = b bzw. ˆx die mit einem (zunächst beliebigen Algorithmus berechnete Näherungslösung (inklusive
KAPIEL 1. LINEARE GLEICHUNGSSYSEME 18 1.4 Stabilität der Gauß-Elimination Bezeichne x die exakte Lösung von Ax = b bzw. ˆx die mit einem (zunächst beliebigen Algorithmus berechnete Näherungslösung (inklusive
Musterlösung 11. D-INFK Lineare Algebra HS 2017 Özlem Imamoglu Olga Sorkine-Hornung
 D-INFK Lineare Algebra HS 27 Özlem Imamoglu Olga Sorkine-Hornung Musterlösung. Wir bezeichnen die Spalten von A als A (a a 2 a 3 ) und die Spalten des Resultats der QR-Zerlegung mit Q (q q 2 q 3 ), R (r
D-INFK Lineare Algebra HS 27 Özlem Imamoglu Olga Sorkine-Hornung Musterlösung. Wir bezeichnen die Spalten von A als A (a a 2 a 3 ) und die Spalten des Resultats der QR-Zerlegung mit Q (q q 2 q 3 ), R (r
Gaußsche Ausgleichsrechnung
 Kapitel 6 Gaußsche Ausgleichsrechnung 6. Gaußsche Methode der kleinsten Fehlerquadrate Die Gaußsche Methode der kleinsten Fehlerquadrate wurde 89 von C.F. Gauß in dem Aufsatz Theorie der Bewegung der Himmelkörper
Kapitel 6 Gaußsche Ausgleichsrechnung 6. Gaußsche Methode der kleinsten Fehlerquadrate Die Gaußsche Methode der kleinsten Fehlerquadrate wurde 89 von C.F. Gauß in dem Aufsatz Theorie der Bewegung der Himmelkörper
Institut für Geometrie und Praktische Mathematik
 RWTH Aachen Verständnisfragen-Teil Institut für Geometrie und Praktische Mathematik 4 Punkte Es gibt zu jeder der Aufgaben vier Teilaufgaben. Diese sind mit bzw. zu kennzeichnen hinschreiben. Es müssen
RWTH Aachen Verständnisfragen-Teil Institut für Geometrie und Praktische Mathematik 4 Punkte Es gibt zu jeder der Aufgaben vier Teilaufgaben. Diese sind mit bzw. zu kennzeichnen hinschreiben. Es müssen
3 Lineare Gleichungen
 Aufgabe 3. Man löse die lineare Gleichung a 2 x b 2 a a(b ax) b + b2 a = a, a b nach der Unbekannten x auf und diskutiere die möglichen Fälle. a 2 x b 2 a a(b ax) b + b2 a = a a b a 2 bx b 3 a 2 b + a
Aufgabe 3. Man löse die lineare Gleichung a 2 x b 2 a a(b ax) b + b2 a = a, a b nach der Unbekannten x auf und diskutiere die möglichen Fälle. a 2 x b 2 a a(b ax) b + b2 a = a a b a 2 bx b 3 a 2 b + a
Algorithmen und Datenstrukturen (für ET/IT)
") Algorithmen und Datenstrukturen (für ET/IT) Sommersemester 2017 Dr. Stefanie Demirci Computer Aided Medical Procedures Technische Universität München Programm heute 7 Fortgeschrittene Datenstrukturen 8
Algorithmen und Datenstrukturen (für ET/IT) Sommersemester 2017 Dr. Stefanie Demirci Computer Aided Medical Procedures Technische Universität München Programm heute 7 Fortgeschrittene Datenstrukturen 8
TU Ilmenau Institut für Mathematik FG Numerische Mathematik und Informationsverarbeitung PD Dr. W. Neundorf Datei: UEBG2.TEX
 TU Ilmenau Institut für Mathematik FG Numerische Mathematik und Informationsverarbeitung PD Dr. W. Neundorf Datei: UEBG2.TEX Übungsaufgaben zum Lehrgebiet Numerische Mathematik - Serie 2 Beweise Sie folgende
TU Ilmenau Institut für Mathematik FG Numerische Mathematik und Informationsverarbeitung PD Dr. W. Neundorf Datei: UEBG2.TEX Übungsaufgaben zum Lehrgebiet Numerische Mathematik - Serie 2 Beweise Sie folgende
Ferienkurs Mathematik für Physiker I Skript Teil 3 ( )
") Ferienkurs Mathematik für Physiker I WS 2016/17 Ferienkurs Mathematik für Physiker I Skript Teil 3 (29032017) 1 Lineare Gleichungssysteme Oft hat man es in der Physik mit unbekannten Größen zu tun, für
Ferienkurs Mathematik für Physiker I WS 2016/17 Ferienkurs Mathematik für Physiker I Skript Teil 3 (29032017) 1 Lineare Gleichungssysteme Oft hat man es in der Physik mit unbekannten Größen zu tun, für
Diplom VP Numerik 27. August 2007
 Diplom VP Numerik 27. August 2007 Multiple-Choice-Test 30 Punkte Bei jeder MC-Aufgabe ist mindestens eine Aussage korrekt. Wird dennoch bei einer MC-Aufgabe keine einzige Aussage angekreuzt, gilt diese
Diplom VP Numerik 27. August 2007 Multiple-Choice-Test 30 Punkte Bei jeder MC-Aufgabe ist mindestens eine Aussage korrekt. Wird dennoch bei einer MC-Aufgabe keine einzige Aussage angekreuzt, gilt diese
4.6 Berechnung von Eigenwerten
 4.6 Berechnung von Eigenwerten Neben der Festlegung auf den betragsgrößten Eigenwert hat die Potenzmethode den Nachteil sehr langsamer Konvergenz, falls die Eigenwerte nicht hinreichend separiert sind.
4.6 Berechnung von Eigenwerten Neben der Festlegung auf den betragsgrößten Eigenwert hat die Potenzmethode den Nachteil sehr langsamer Konvergenz, falls die Eigenwerte nicht hinreichend separiert sind.
Lineare Gleichungssystem
 Lineare Gleichungssystem 8. Juli 07 Inhaltsverzeichnis Einleitung Der Gauß-Algorithmus 4 3 Lösbarkeit von Gleichungssystemen 6 Einleitung Wir haben uns bisher hauptsächlich mit dem Finden von Nullstellen
Lineare Gleichungssystem 8. Juli 07 Inhaltsverzeichnis Einleitung Der Gauß-Algorithmus 4 3 Lösbarkeit von Gleichungssystemen 6 Einleitung Wir haben uns bisher hauptsächlich mit dem Finden von Nullstellen
Kapitel 2. Lösung linearer Gleichungssysteme I. Inhalt: 2.1 Fehlerabschätzungen 2.2 Direkte Lösungsverfahren 2.3 Spezielle Gleichungssysteme
 Kapitel 2. Lösung linearer Gleichungssysteme I Inhalt: 2.1 Fehlerabschätzungen 2.2 Direkte Lösungsverfahren 2.3 Spezielle Gleichungssysteme Numerische Mathematik I 34 Prolog: Wiederholung aus der Linearen
Kapitel 2. Lösung linearer Gleichungssysteme I Inhalt: 2.1 Fehlerabschätzungen 2.2 Direkte Lösungsverfahren 2.3 Spezielle Gleichungssysteme Numerische Mathematik I 34 Prolog: Wiederholung aus der Linearen
Matrizen: Grundbegriffe. 1-E Ma 1 Lubov Vassilevskaya
 Matrizen: Grundbegriffe -E Ma Lubov Vassilevskaya Lineares Gleichungssystem Abb. : Der Schnittpunkt P der beiden Geraden ist die graphische Lösung des linearen Gleichungssystem g : y = x, g 2 : y = 3 x,
Matrizen: Grundbegriffe -E Ma Lubov Vassilevskaya Lineares Gleichungssystem Abb. : Der Schnittpunkt P der beiden Geraden ist die graphische Lösung des linearen Gleichungssystem g : y = x, g 2 : y = 3 x,
Kapitel 3. Lineare Ausgleichsrechnung. Problem: Löse A x = b, A R m n, b R m, wobei. Rang(A) < Rang([A;b])
![Kapitel 3. Lineare Ausgleichsrechnung. Problem: Löse A x = b, A R m n, b R m, wobei. Rang(A) < Rang([A;b])](/thumbs/79/79294993.jpg "Kapitel 3. Lineare Ausgleichsrechnung. Problem: Löse A x = b, A R m n, b R m, wobei. Rang(A) < Rang([A;b])") Kapitel 3. Lineare Ausgleichsrechnung Problem: Löse A x = b, A R m n, b R m, wobei Rang(A) < Rang([A;b]) zugelassen ist, d.h. Ax = b ist nur im weitesten Sinne lösbar. 3.1 Lineares Ausgleichsproblem: Zu
Kapitel 3. Lineare Ausgleichsrechnung Problem: Löse A x = b, A R m n, b R m, wobei Rang(A) < Rang([A;b]) zugelassen ist, d.h. Ax = b ist nur im weitesten Sinne lösbar. 3.1 Lineares Ausgleichsproblem: Zu
K. Eppler, Inst. f. Num. Mathematik Übungsaufgaben. 12. Übung: Woche vom (Lin.Alg.
 Übungsaufgaben 12. Übung: Woche vom 16. 1.-20. 1. 2017 (Lin.Alg. I): Heft Ü 3: 2.1.11; 2.1.8; 2.1.17; 2.2.1; 2.2.3; 1.1.1; 1.1.4; Hinweis 1: 3. Test (Integration, analyt. Geom.) ist seit 9.1. freigeschalten
Übungsaufgaben 12. Übung: Woche vom 16. 1.-20. 1. 2017 (Lin.Alg. I): Heft Ü 3: 2.1.11; 2.1.8; 2.1.17; 2.2.1; 2.2.3; 1.1.1; 1.1.4; Hinweis 1: 3. Test (Integration, analyt. Geom.) ist seit 9.1. freigeschalten
Lineare Gleichungssysteme
 Lineare Gleichungssysteme 6. Vorlesung 170004 Numerische Methoden I Clemens Brand 25. März 2010 Nachträge Gliederung Nachträge it Nachträge Wichtige Begriffe Eine Zusammenfassung der Folien 8 16 der letzten
Lineare Gleichungssysteme 6. Vorlesung 170004 Numerische Methoden I Clemens Brand 25. März 2010 Nachträge Gliederung Nachträge it Nachträge Wichtige Begriffe Eine Zusammenfassung der Folien 8 16 der letzten
2 Lineare Gleichungssysteme
 Vorlesungsskript HM-Numerik (SS 4): Kapitel Version: 9 Mai 4 Lineare Gleichungssysteme Gegeben: A R n n mit det(a) b R n Gesucht: x R n mit Ax = b Zeilenäquilibrierung Möchten zunächst die Kondition des
Vorlesungsskript HM-Numerik (SS 4): Kapitel Version: 9 Mai 4 Lineare Gleichungssysteme Gegeben: A R n n mit det(a) b R n Gesucht: x R n mit Ax = b Zeilenäquilibrierung Möchten zunächst die Kondition des
Matrizen und Determinanten, Aufgaben
 Matrizen und Determinanten, Aufgaben Inhaltsverzeichnis 1 Multiplikation von Matrizen 1 11 Lösungen 3 2 Determinanten 6 21 Lösungen 7 3 Inverse Matrix 8 31 Lösungen 9 4 Matrizengleichungen 11 41 Lösungen
Matrizen und Determinanten, Aufgaben Inhaltsverzeichnis 1 Multiplikation von Matrizen 1 11 Lösungen 3 2 Determinanten 6 21 Lösungen 7 3 Inverse Matrix 8 31 Lösungen 9 4 Matrizengleichungen 11 41 Lösungen
6 Lineare Gleichungssysteme
 6 LINEARE GLEICHUNGSSYSTEME 3 6 Lineare Gleichungssysteme Unter einem linearen Gleichungssystem verstehen wir ein System von Gleichungen α ξ + + α n ξ n = β α m ξ + + α mn ξ n = β m mit Koeffizienten α
6 LINEARE GLEICHUNGSSYSTEME 3 6 Lineare Gleichungssysteme Unter einem linearen Gleichungssystem verstehen wir ein System von Gleichungen α ξ + + α n ξ n = β α m ξ + + α mn ξ n = β m mit Koeffizienten α
4 Lineare Ausgleichsrechnung
 Numerik I 15 4 Lineare Ausgleichsrechnung Die folgende Tabelle zeigt die Bevölkerungsentwicklung in den U.S.A. 19 191 192 193 194 75.995 91.972 15.711 123.23 131.669 195 196 197 198 199 15.697 179.323
Numerik I 15 4 Lineare Ausgleichsrechnung Die folgende Tabelle zeigt die Bevölkerungsentwicklung in den U.S.A. 19 191 192 193 194 75.995 91.972 15.711 123.23 131.669 195 196 197 198 199 15.697 179.323