Simulation und Optimierung in dynamischen Systemen Dr.-Ing. Christian Reinl,
|
|
|
- Cornelia Fiedler
- vor 5 Jahren
- Abrufe
Transkript

1 Simulation und Optimierung in dynamischen Systemen Dr.-Ing. Christian Reinl, Simulation, Systems Optimization, and Robotics









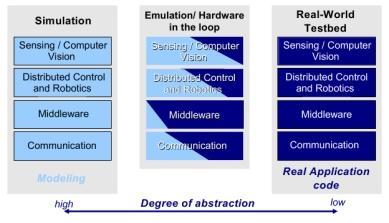



2 Überblick Simulation / Evaluation in MME Mobilität in WSN Optimierung beim Polieren von Linsen Koordination Organisation Lehre: Computational Engineering /Optimierung Diskret-kontinuierliche Modellierung und Optimierung kooperativer Mehrfahrzeugsysteme Modellbasierte Kompensation der Abdrängung Modellierung und Optimierung dynamischer Systeme TU Darmstadt FB Informatik FG Simulation, Systemoptimierung & Robotik 1
3 Fräsen mit Industrierobotern: Dynamikmodellierung, Parameteridentifikation und optimale Roboterbahnplanung zur Kompensation der Abdrängung Prof. Dr.-Ing. E. Abele Dipl.-Ing. J. Bauer Prof. Dr. O. von Stryk Dr.-Ing. M. Friedmann Dr.-Ing. C. Reinl Simulation, Systems Optimization, and Robotics Gefördert im Rahmen des Schwerpunktprogramm SPP1180: Prognose und Beeinflussung der Wechselwirkungen von Strukturen und Prozessen TU Darmstadt FB Informatik FG Simulation, Systemoptimierung & Robotik 2

4 Fräsen mit Industrierobotern: Motivation und Herausforderung 1. Statische Abdrängung auf Grund begrenzter Steifigkeiten 2. Niederfrequente Schwingungen auf Grund angeregter Eigenfrequenzen des Systems 3. Hochfrequente Schwingungen auf Grund höherer Eigenfrequenzen (z.b. von Spindel, Werkzeug) Werkstücktisch Werkstück Statische Abdrängung Niederfrequente Schwingung Werkstück IR y x Statische Abdrängung statischer Versatz 1mm Sollbahn IR y x Reale Bahn y x Soll-Bahn Sollbahn Ist-Bahn y x Soll-Bahn Ist-Bahn Soll-Bahn y Ist-Bahn x z Querschnitt x Ziel: Kompensierende Bahnvorgabe TU Darmstadt FB Informatik FG Simulation, Systemoptimierung & Robotik 3

 G ( q ) J F K ( q ) D ( q ) i i i i i i i ' c F x xyz, tool")
, tool j e 1 j 1 F K e rta, j, e z TU Darmstadt FB Informatik FG")
5 Wechselwirkung: Roboterstruktur und Fräsprozess Roboterstruktur Wechselwirkung Abdrängung Δx,y,z Fräsprozess Fräskraft F Process MKS-Modell der Roboterdynamik Fräskraftmodell Modellkopplung F y F z M ( q ) q C ( q, q ) G ( q ) J F K ( q ) D ( q ) i i i i i i i ' c F x xyz, tool Offline-Kompensation Fräskraft F F K h (, z)z rta, j, e c j xyz N e N Z T ( ), tool j e 1 j 1 F K e rta, j, e z TU Darmstadt FB Informatik FG Simulation, Systemoptimierung & Robotik 4
6 Modellierung Roboter: Kinematik, Transformationsmatrizen Starrkörper mit Drehgelenk: linkdh, i Rot ( z; qi ) Trans (0, 0, di ) Trans(0, 0, ai ) Rot ( x; i ) q i aktuelle Gelenkstellung; d i, z i a i DH-Parameter Genaue Positionierung entlang der z- Achse durch Verschiebung um p i : link w rep, i T rans (0, 0, p i ) R ot ( z; i ) T rans (0, 0, d i p i ) T rans (0, 0, d ) T rans (0, 0, a ) R ot ( x; ). i i i Kinematik-Modellerweiterung: virtuelle Drehachsen link Trans(0, 0, p ) Rot ( z; ) Rot ( x; ) ext, i i i x, i Rot ( y; ) Trans(0, 0, d p ) Rot ( x; ) y, i i i i Trans(0, 0, d ) Trans(0, 0, a ) i i q x,i q y,i : Elastizitäts-Rotationen TU Darmstadt FB Informatik FG Simulation, Systemoptimierung & Robotik 5
7 Modellierung Roboterdynamik: Implementierung modularer Aufbau aus Elementen Basis, Schubgelenk, Drehgelenk, Vergabelung, Starrkörper, Ende Objektorientierte Implementierung in C++ Anbindung automatischer Differentiation: ADOL-C [Walther] Schnittstelle zu Matlab Beliebige Roboter mit Baumstruktur anwendbar Bewegungsgleichungen werden rekursiv zur Laufzeit erzeugt: _ Strukturbeschreibung lässt sich als Eingabedaten vorhalten Flexible Platzierung von Elastizitäten MKS-Beschreibung unabhängig von der Implementierung erlaubt die Berechnung von Ableitungsinformationen _ Sensitivitätsanalyse nach beliebigen System- und Strukturparametern _ Eröffnet Möglichkeiten der effizienten, automatisierten Parameteridentifikation _ Voraussetzung für Optimalsteuerungsmethoden TU Darmstadt FB Informatik FG Simulation, Systemoptimierung & Robotik 8

 F c xyz, tool + Fräskraftmodell")
 F, tool j e 1")

8 Simulation: Vorhersage der Bahnabweichung MKS-Roboter-Modell F y F x F z M q q C q q G q J ' ( ) (, ) ( ) F c xyz, tool + Fräskraftmodell Fräskraft F F K h (, z)z K z rta, j, e c j xyz N e N Z T ( ) F, tool j e 1 j 1 e rta, j, e TU Darmstadt FB Informatik FG Simulation, Systemoptimierung & Robotik 14



9 Kompensation der Bahnabweichung: (1) Idealisierte Referenzlösung Simulationslauf mit idealisiert steifem Robotermodell für eine Idealbahn: _Ideale Gelenkwinkeltrajektorien _Nach Filterung: Idealer zeitlicher Verlauf der Fräskräfte Simulation idealer Roboter Idealer Kraftverlauf Fräsbahn Werkstück TU Darmstadt FB Informatik FG Simulation, Systemoptimierung & Robotik 15
, q ( t), q ( t), F ( t) Auswahl Kompensationspunkte Inversdynamik (RNE) Momente an Kompensationspunkten Löse: K ( q q ) D ( q q ) comp ideal comp ideal q für ideal ideal comp q")
10 Kompensation der Bahnabweichung: (2) Bestimmung kompensierender Trajektorien Idealkraft und Gelenkstellung aus erstem Simulationslauf Glättung Numerisches Differenzieren q comp q ideal ideale Trajektorien ( t), q ( t), q ( t), F ( t) Auswahl Kompensationspunkte Inversdynamik (RNE) Momente an Kompensationspunkten Löse: K ( q q ) D ( q q ) comp ideal comp ideal q für ideal ideal comp q ideal _Lineares Gl.-System kompensierende Gelenkwinkel ext Direkte, effiziente Berechnung: 1 Simulationslauf + lineares Gleichungssystem an einzelnen Punkten lösen Dient als Startlösung für optimierungsbasierte Verfahren Kompensation statischer Anteile durch Annahme q ideal q ideal 0 TU Darmstadt FB Informatik FG Simulation, Systemoptimierung & Robotik 16

11 Kompensation der Bahnabweichung: (3) Experimentelle Validierung Fräsversuch: 1. Zunächst Bahn mit niedriger Vorschubgeschwindigkeit fräsen _Abdrängung vernachlässigbar 2. Kompensationsstrategie angewandt für Fräsen mit gewünschter Vorschubgeschwindigkeit Verbesserung der Abdrängung von 0.72 mm zu 0.15 mm ohne Kompensation mit Kompensation TU Darmstadt FB Informatik FG Simulation, Systemoptimierung & Robotik 17
12 Sergiy Gogolenko Aktuelle Herausforderung: (1) Automatisierte Parameteridentifikation Roboterdynamiksimulation stellt effiziente Berechnungen der Vorwärtsdynamikberechnung (CRBA, ABA [Featherstone]), Inversdynamikberechnung (RNE) und deren Ableitungen (ADOL-C [Walther]) nach allen Zustandsgrößen und Parametern bereit. Sensitivitätsanalyse im Arbeitsraum Optimierungsbasierte Parameteridentifikation mit Mehrfachschießverfahren weitere Anwendung: design of experiments mit geeigneter Sensordaten: automatisierte Modellkalibrierung TU Darmstadt FB Informatik FG Simulation, Systemoptimierung & Robotik 18
13 Aktuelle Herausforderung: (2) Kompensation durch Optimalsteuerung Roboterdynamiksimulation stellt effiziente Berechnungen der Vorwärtsdynamikberechnung (CRBA, ABA [Featherstone]), Inversdynamikberechnung (RNE) und deren Ableitungen (ADOL-C [Walther]) nach allen Zustandsgrößen, Parametern und Steuerungen bereit. Optimalsteuerungsmethoden anwendbar Einbeziehen von Beschränkungen Frage: Schnittstelle zur Übergabe optimaler Trajektorien an den Roboter? _ Erneutes diskret-kontinuierliches Optimierungsproblem lösen t f m in ( q ( t ) q ( t )) ( q ( t ) q ( t )) dt t ideal ist ideal ist unter den Nebenbedingungen M q q C q q G q J ' ( ) (, ) ( ) F c xyz, tool (( q s ) ), if ( q ) s D ( q ) K (( q s ) ), if ( q ) s 0, else i i i i i i i i i i i i i i i i i r ( q, q, q, ) 0 q( t ) q ; q( t ) q 0 0 q( t ) q ; q( t ) q 0 0 f f f f TU Darmstadt FB Informatik FG Simulation, Systemoptimierung & Robotik 19
14 Zusammenfassung und Ausblick Effiziente Implementierung eines Robotermodells Realisierung einer Dexel-basierten Abtragssimulation mit integrierter Kraftberechnung Kopplung der Modelle Effiziente Kompensationsmethode auf Basis einer idealen Referenzlösung Konzepte anwendbar auf beliebige Roboter mit Baumstruktur Aktuelle Herausforderungen: Optimierte, numerisch effiziente Prarameteridentifikation Kompensation der Abdrängung mit Optimalsteuerungsmethoden Vielen Dank für Ihre Aufmerksamkeit! TU Darmstadt FB Informatik FG Simulation, Systemoptimierung & Robotik 20
Einsatz von Robotern in der spanenden Fertigung
 Allgemeine Bermerkungen zu Stil der Artikel in TU forschen : Schreibstil entspricht einer Erklärung für den interessierten Laien kaum Details; vielmehr stehen Motivation und Visionen im Zentrum Einsatz
Allgemeine Bermerkungen zu Stil der Artikel in TU forschen : Schreibstil entspricht einer Erklärung für den interessierten Laien kaum Details; vielmehr stehen Motivation und Visionen im Zentrum Einsatz
PARADOM. Parallele Algorithmische Differentiation in OpenModelica für energietechnische Simulationen und Optimierungen.
 Zentrum für Informationsdienste und Hochleistungsrechnen TU Dresden PARADOM Parallele Algorithmische Differentiation in OpenModelica für energietechnische Simulationen und Optimierungen Martin Flehmig
Zentrum für Informationsdienste und Hochleistungsrechnen TU Dresden PARADOM Parallele Algorithmische Differentiation in OpenModelica für energietechnische Simulationen und Optimierungen Martin Flehmig
Modellgestützte Online-Programmierverfahren für Industrieroboter
 Modellgestützte Online-Programmierverfahren für Industrieroboter 40. Sitzung des FA 4.13 Steuerung und Regelung von Robotern Universität Karlsruhe(TH) Institut für Prozessrechentechnik,Automation und Robotik
Modellgestützte Online-Programmierverfahren für Industrieroboter 40. Sitzung des FA 4.13 Steuerung und Regelung von Robotern Universität Karlsruhe(TH) Institut für Prozessrechentechnik,Automation und Robotik
Vorwärtskinematik und inverse Kinematik. Andreas Schmidtke
 Vorwärtskinematik und inverse Kinematik Andreas Schmidtke Übersicht 1. Vorwärtskinematik 2. Standardframes 3. Inverse Kinematik 4. Bemerkungen zur Numerik Übersicht 1. Vorwärtskinematik 1. Modellierung
Vorwärtskinematik und inverse Kinematik Andreas Schmidtke Übersicht 1. Vorwärtskinematik 2. Standardframes 3. Inverse Kinematik 4. Bemerkungen zur Numerik Übersicht 1. Vorwärtskinematik 1. Modellierung
Einsatz von Robotern in
 44 forschen Einsat von Robotern in der spanenden Fertigung Zur fräsenden Bearbeitung von kompleen Bauteilen mit Genauigkeitsanforderungen von weniger als,1 mm werden in der industriellen Prais fünfachsige
44 forschen Einsat von Robotern in der spanenden Fertigung Zur fräsenden Bearbeitung von kompleen Bauteilen mit Genauigkeitsanforderungen von weniger als,1 mm werden in der industriellen Prais fünfachsige
Berlin Online Bahnkorrektur eines Industrieroboters basierend auf Laser-Messdaten
 Berlin 21.03.2014 Online Bahnkorrektur eines Industrieroboters basierend auf Laser-Messdaten Dipl. Ing. Kaveh Haddadian Gliederung 1. Vorstellung des Instituts 2. Motivation 3. Problemstellung / Lösungsidee
Berlin 21.03.2014 Online Bahnkorrektur eines Industrieroboters basierend auf Laser-Messdaten Dipl. Ing. Kaveh Haddadian Gliederung 1. Vorstellung des Instituts 2. Motivation 3. Problemstellung / Lösungsidee
Simulation des Fräsens mit Industrierobotern: Trajektorienplanung und experimentelle Parameteridentifikation
 Simulation des Fräsens mit Industrierobotern: Trajektorienplanung und experimentelle Parameteridentifikation Simulation of milling with industrial robots: trajectory planning and experimental parameter
Simulation des Fräsens mit Industrierobotern: Trajektorienplanung und experimentelle Parameteridentifikation Simulation of milling with industrial robots: trajectory planning and experimental parameter
Integration eines pneumatischen Roboters in die Robotics API
 Integration eines pneumatischen Roboters in die Robotics API Ziel: Integration eines AirArms in die Robotics API und Umsetzung eines Demo-Anwendung Idee: Die MRK (Mensch Roboter Kooperation) bekommt zunehmend
Integration eines pneumatischen Roboters in die Robotics API Ziel: Integration eines AirArms in die Robotics API und Umsetzung eines Demo-Anwendung Idee: Die MRK (Mensch Roboter Kooperation) bekommt zunehmend
CE-Bachelor Studiengang
 CE-Bachelor Studiengang Vertiefungsrichtung Informatik M.Sc. Stefan Kurowski 21.02.2012 Vertiefungsrichtung Informatik 1 Studienplan CE (Bachelor) Semester 5-6 5 Fachrichtungen Semester 1-4 Gemeinsame
CE-Bachelor Studiengang Vertiefungsrichtung Informatik M.Sc. Stefan Kurowski 21.02.2012 Vertiefungsrichtung Informatik 1 Studienplan CE (Bachelor) Semester 5-6 5 Fachrichtungen Semester 1-4 Gemeinsame
Entwicklung einer allgemeinen dynamischen inversen Kinematik
 Entwicklung einer allgemeinen dynamischen inversen Kinematik Christoph Schmiedecke Studiendepartment Informatik Hochschule für Angewandte Wissenschaften Hamburg 06. Januar 2010 Inhaltsverzeichnis 1 Motivation
Entwicklung einer allgemeinen dynamischen inversen Kinematik Christoph Schmiedecke Studiendepartment Informatik Hochschule für Angewandte Wissenschaften Hamburg 06. Januar 2010 Inhaltsverzeichnis 1 Motivation
Wechselwirkungen von Fräsprozess und Maschinenstruktur am Beispiel des Industrieroboters *
 preprint of an article which appeared in wt-online 9-2008; pp. 733-737 SPRINGER-VDI-VERLAG Industrieroboter, Fräsen Wechselwirkungen von Fräsprozess und Maschinenstruktur am Beispiel des Industrieroboters
preprint of an article which appeared in wt-online 9-2008; pp. 733-737 SPRINGER-VDI-VERLAG Industrieroboter, Fräsen Wechselwirkungen von Fräsprozess und Maschinenstruktur am Beispiel des Industrieroboters
Humanoide Roboter. Shuji Kajita. Theorie und Technik des Künstlichen Menschen AKA. Herausgeber
 Humanoide Roboter Theorie und Technik des Künstlichen Menschen Herausgeber Shuji Kajita AKA Inhaltsverzeichnis Vorwort Thomas Christaller ix Shuji Kajita Kapitel 1. Überblick Humanoide Roboter 1 Kapitel
Humanoide Roboter Theorie und Technik des Künstlichen Menschen Herausgeber Shuji Kajita AKA Inhaltsverzeichnis Vorwort Thomas Christaller ix Shuji Kajita Kapitel 1. Überblick Humanoide Roboter 1 Kapitel
Finite Elemente Berechnungen verklebter Strukturen
 Finite Elemente Berechnungen verklebter Strukturen Dr. Pierre Jousset, Sika Technology AG 24.4.213 1 Sika Technology AG Agenda Motivation und Ziele Die strukturellen Epoxy Klebstoffe SikaPower Finite Element
Finite Elemente Berechnungen verklebter Strukturen Dr. Pierre Jousset, Sika Technology AG 24.4.213 1 Sika Technology AG Agenda Motivation und Ziele Die strukturellen Epoxy Klebstoffe SikaPower Finite Element
Mehrkörper-Simulation Theorie und Praxis
 Mehrkörper-Simulation Theorie und Praxis Josef Althaus NTB Buchs 4. Swiss VPE Symposium, 24. April 2013, Hochschule für Technik Rapperswil 1 Inhalt Was ist ein Mehrkörpersystem (MKS)? Grundlagen des Modellaufbaus
Mehrkörper-Simulation Theorie und Praxis Josef Althaus NTB Buchs 4. Swiss VPE Symposium, 24. April 2013, Hochschule für Technik Rapperswil 1 Inhalt Was ist ein Mehrkörpersystem (MKS)? Grundlagen des Modellaufbaus
Inhaltsverzeichnis. Georg Stark. Robotik mit MATLAB ISBN: Weitere Informationen oder Bestellungen unter
 Inhaltsverzeichnis Georg Stark Robotik mit MATLAB ISBN: 978-3-446-41962-9 Weitere Informationen oder Bestellungen unter http://www.hanser.de/978-3-446-41962-9 sowie im Buchhandel. Carl Hanser Verlag, München
Inhaltsverzeichnis Georg Stark Robotik mit MATLAB ISBN: 978-3-446-41962-9 Weitere Informationen oder Bestellungen unter http://www.hanser.de/978-3-446-41962-9 sowie im Buchhandel. Carl Hanser Verlag, München
10 Inhaltsverzeichnis
 Georg Stark Robotik mit MATLAB Mit 101 Bildern, 33 Tabellen, 40 Beispielen, 55 Aufgaben und 37 Listings Fachbuchverlag Leipzig im Carl Hanser Verlag Inhaltsverzeichnis 1 Einführung in die Robotik 13 1.1
Georg Stark Robotik mit MATLAB Mit 101 Bildern, 33 Tabellen, 40 Beispielen, 55 Aufgaben und 37 Listings Fachbuchverlag Leipzig im Carl Hanser Verlag Inhaltsverzeichnis 1 Einführung in die Robotik 13 1.1
Optimale Steuerung. Karoline Pelka, Christian Schmidt, Christoph Große Kracht. 13. Dezember 2012
 13. Dezember 212 1 Einleitung 2 3 4 5 6 Bang-Bang-Steuerung Berücksichtigung der Steuerung Minimierung des Steueraufwandes 7 Einleitung Ende des 17. Jahrhunderts Variationsrechnung (Brachistochrone) Einleitung
13. Dezember 212 1 Einleitung 2 3 4 5 6 Bang-Bang-Steuerung Berücksichtigung der Steuerung Minimierung des Steueraufwandes 7 Einleitung Ende des 17. Jahrhunderts Variationsrechnung (Brachistochrone) Einleitung
Ziel: Beschreibung der unterschiedlichen Gelenktypen und deren Einfluss auf die Bewegung der Körper
 Kinematik Gelenkkinematik Ziel: Beschreibung der unterschiedlichen Gelenktypen und deren Einfluss auf die Bewegung der Körper Definition: Ein (kinematisches) Gelenk ist eine Verbindung zwischen zwei Segmenten,
Kinematik Gelenkkinematik Ziel: Beschreibung der unterschiedlichen Gelenktypen und deren Einfluss auf die Bewegung der Körper Definition: Ein (kinematisches) Gelenk ist eine Verbindung zwischen zwei Segmenten,
Der diskrete Kalman Filter
 Der diskrete Kalman Filter Fachbereich: Informatik Betreuer: Marc Drassler Patrick Winkler 1168954 6. Dezember 2004 Technische Universität Darmstadt Simulation und Systemoptimierung Darmstadt Dribbling
Der diskrete Kalman Filter Fachbereich: Informatik Betreuer: Marc Drassler Patrick Winkler 1168954 6. Dezember 2004 Technische Universität Darmstadt Simulation und Systemoptimierung Darmstadt Dribbling
Projektpraktikum: Bildauswertung und fusion Wintersemester 2012 / 2013
 Projektpraktikum: Bildauswertung und fusion Wintersemester 2012 / 2013 ies.anthropomatik.kit.edu Kalibrierung - subpixelgenaue Fokusmessung Zusammenfassung: Zur automatisierten Kalibrierung eines neuartigen
Projektpraktikum: Bildauswertung und fusion Wintersemester 2012 / 2013 ies.anthropomatik.kit.edu Kalibrierung - subpixelgenaue Fokusmessung Zusammenfassung: Zur automatisierten Kalibrierung eines neuartigen
Lineare Abbildungen. De nition Seien V, W Vektorräume. Eine Abbildung f : V! W heißt linear, wenn gilt
 Lineare Abbildungen Lineare Abbildungen De nition Seien V, W Vektorräume. Eine Abbildung f : V! W heißt linear, wenn gilt (L. ) f ist homogen; d.h. f( ~v) = f(~v) für alle 2 R, ~v 2 V, (L. ) f ist additiv;
Lineare Abbildungen Lineare Abbildungen De nition Seien V, W Vektorräume. Eine Abbildung f : V! W heißt linear, wenn gilt (L. ) f ist homogen; d.h. f( ~v) = f(~v) für alle 2 R, ~v 2 V, (L. ) f ist additiv;
Arbeitsbereich Werkzeugmaschinen und Automatisierungstechnik. Automatisierungstechnik
 1 Arbeitsbereich Werkzeugmaschinen und Automatisierungstechnik Werkzeugmaschinen - Konfiguration von Fertiganlagen - Optimierung des thermischen und dynamischen Verhaltens - Spanntechnik allgemeiner Maschinenbau
1 Arbeitsbereich Werkzeugmaschinen und Automatisierungstechnik Werkzeugmaschinen - Konfiguration von Fertiganlagen - Optimierung des thermischen und dynamischen Verhaltens - Spanntechnik allgemeiner Maschinenbau
Jonas Schulz Christopher Zemann Markus Gölles
 Effizienzsteigerung und Optimierung des Zusammenspiels von Scheitholzkessel, Pufferspeicher und Solaranlage durch die Verwendung mathematischer Modelle Jonas Schulz Christopher Zemann Markus Gölles Ausgangssituation
Effizienzsteigerung und Optimierung des Zusammenspiels von Scheitholzkessel, Pufferspeicher und Solaranlage durch die Verwendung mathematischer Modelle Jonas Schulz Christopher Zemann Markus Gölles Ausgangssituation
AW 1 - Vortrag. Simulationsmodell für visuell geführte Roboter. von Bernd Pohlmann. Betreuender: Prof. Dr. Andreas Meisel
 AW 1 - Vortrag Simulationsmodell für visuell geführte Roboter von Betreuender: Prof. Dr. Andreas Meisel Inhalt 1. Motivation 2. Ziel 3. Einführung Robotik 4. Kinematik 5. Denavit-Hartenberg 6. Kameramodell
AW 1 - Vortrag Simulationsmodell für visuell geführte Roboter von Betreuender: Prof. Dr. Andreas Meisel Inhalt 1. Motivation 2. Ziel 3. Einführung Robotik 4. Kinematik 5. Denavit-Hartenberg 6. Kameramodell
Interpolation positionsabhängiger Nachgiebigkeitsfrequenzgänge von Werkzeugmaschinen Harald Altstädter, Gebrüder HELLER Maschinenfabrik GmbH
 Interpolation positionsabhängiger Nachgiebigkeitsfrequenzgänge von Werkzeugmaschinen Harald Altstädter, Gebrüder HELLER Maschinenfabrik GmbH Übersicht Stand der Technik: HELLER Gesamtmaschinensimulation
Interpolation positionsabhängiger Nachgiebigkeitsfrequenzgänge von Werkzeugmaschinen Harald Altstädter, Gebrüder HELLER Maschinenfabrik GmbH Übersicht Stand der Technik: HELLER Gesamtmaschinensimulation
AUTONOMES KREISELSTABILISIERTES FAHRRAD
 AUTONOMES KREISELSTABILISIERTES FAHRRAD Ziel: Positionsregelung eines stabilisierten Fahrrades Modellbildung Gesamtfahrrad Analyse Eigenstabilität (Gyroeffekt, Nachlaufeffekt) Hardwareadaption Lenkmotor
AUTONOMES KREISELSTABILISIERTES FAHRRAD Ziel: Positionsregelung eines stabilisierten Fahrrades Modellbildung Gesamtfahrrad Analyse Eigenstabilität (Gyroeffekt, Nachlaufeffekt) Hardwareadaption Lenkmotor
Prüfung SS Robotik
 Prüfung SS 2002 Robotik Anmerkungen: Aufgabenblätter auf Vollständigkeit überprüfen Nur Blätter mit Namen und Matr.Nr. werden korrigiert. Keine rote Farbe verwenden. Zu jeder Lösung Aufgabennummer angeben.
Prüfung SS 2002 Robotik Anmerkungen: Aufgabenblätter auf Vollständigkeit überprüfen Nur Blätter mit Namen und Matr.Nr. werden korrigiert. Keine rote Farbe verwenden. Zu jeder Lösung Aufgabennummer angeben.
1-, 2-, 3D-Modelle: Überblick, Vergleich und Anwendung
 Fakultät Informatik > Angewandte Informatik > Technische Informationssysteme Studentischer Vortrag 1-, 2-, 3D-Modelle: Überblick, Vergleich und Anwendung Mai, Tuan Linh Dresden, 17.Jan.2011 Inhalt 1. Motivation
Fakultät Informatik > Angewandte Informatik > Technische Informationssysteme Studentischer Vortrag 1-, 2-, 3D-Modelle: Überblick, Vergleich und Anwendung Mai, Tuan Linh Dresden, 17.Jan.2011 Inhalt 1. Motivation
Gliederung. Gliederung (cont.) Gliederung (cont.)
 Gliederung (cont.)") - Gliederung Jianwei Zhang zhang@informatik.uni-hamburg.de Fakultät für Mathematik, Informatik und Naturwissenschaften Technische Aspekte Multimodaler Systeme 11. Mai 2010 Allgemeine Informationen Einführung
- Gliederung Jianwei Zhang zhang@informatik.uni-hamburg.de Fakultät für Mathematik, Informatik und Naturwissenschaften Technische Aspekte Multimodaler Systeme 11. Mai 2010 Allgemeine Informationen Einführung
Masterstudium Maschinenbau. Vertiefungsrichtung Mechatronik. Verantwortlich: Lehrstuhl für Mechatronik Prof. Dr.-Ing.
 Masterstudium Maschinenbau Vertiefungsrichtung Mechatronik Stand WS 2015/2016 Verantwortlich: Lehrstuhl für Mechatronik Prof. Dr.-Ing. Harald Aschemann http://www.com.uni-rostock.de/ Prof. Dr.-Ing. H.
Masterstudium Maschinenbau Vertiefungsrichtung Mechatronik Stand WS 2015/2016 Verantwortlich: Lehrstuhl für Mechatronik Prof. Dr.-Ing. Harald Aschemann http://www.com.uni-rostock.de/ Prof. Dr.-Ing. H.
1 Einleitung Historie und Anwendungsgebiete Elemente der Mehrkörperdynamik... 2 Literatur... 2
 Inhaltsverzeichnis 1 Einleitung... 1 1.1 Historie und Anwendungsgebiete...... 1 1.2 Elemente der Mehrkörperdynamik..... 2 Literatur...... 2 2 Dynamik des starren Körpers... 3 2.1 Lagebeschreibung......
Inhaltsverzeichnis 1 Einleitung... 1 1.1 Historie und Anwendungsgebiete...... 1 1.2 Elemente der Mehrkörperdynamik..... 2 Literatur...... 2 2 Dynamik des starren Körpers... 3 2.1 Lagebeschreibung......
Bachelorarbeit: Programmable Matter
 Bachelorarbeit: Programmable Matter ProgrammableMatter bzw. programmierbare Strukturen können nach ihrem Aufbau ihre Gestalt noch beliebig verändern. Der entwickelte modulare Roboter ARDS ist, durch seine
Bachelorarbeit: Programmable Matter ProgrammableMatter bzw. programmierbare Strukturen können nach ihrem Aufbau ihre Gestalt noch beliebig verändern. Der entwickelte modulare Roboter ARDS ist, durch seine
Steuerungs- und Regelungskonzepte für eine fluidisch betriebene Roboterhand
 Steuerungs- und Regelungskonzepte für eine fluidisch betriebene Roboterhand Sebastian Beck, Arne Lehmann, Jan Martin, Thomas Lotz, Ralf Mikut Forschungszentrum Karlsruhe, Institut für Angewandte Informatik
Steuerungs- und Regelungskonzepte für eine fluidisch betriebene Roboterhand Sebastian Beck, Arne Lehmann, Jan Martin, Thomas Lotz, Ralf Mikut Forschungszentrum Karlsruhe, Institut für Angewandte Informatik
Freiformbiegen mit rollierendem Biegekopf, Simulation des strukturmechanischen
 15. Deutsches LS-DYNA Forum, Bamberg, 2018 strukturmechanischen Prozesses Markus Gitterle 1, Christian Fritzsche 2, Peter Schüle 3 1 Hochschule für angewandte Wissenschaften München 2 Technische Universität
15. Deutsches LS-DYNA Forum, Bamberg, 2018 strukturmechanischen Prozesses Markus Gitterle 1, Christian Fritzsche 2, Peter Schüle 3 1 Hochschule für angewandte Wissenschaften München 2 Technische Universität
Neues in NX 12 für die Fertigung
 Neues in NX 12 für die Fertigung Die Neuerungen in Kürze Realize innovation. Werkzeug- und Formenbau mit NX CAM Hochwertige Formen 60% schneller Page 2 Werkzeug- und Formenbau Adaptives Fräsen Neue High-Speed
Neues in NX 12 für die Fertigung Die Neuerungen in Kürze Realize innovation. Werkzeug- und Formenbau mit NX CAM Hochwertige Formen 60% schneller Page 2 Werkzeug- und Formenbau Adaptives Fräsen Neue High-Speed
Verfahren der Bewegungsplanung zur Energieminimierung bei Maschinen und Robotern
 Verfahren der Bewegungsplanung zur Energieminimierung bei Maschinen und Robotern Motivation Produktion in der Automobilindustrie: ca. 49% der elektrischen Energie wird von Industrierobotern benötigt davon
Verfahren der Bewegungsplanung zur Energieminimierung bei Maschinen und Robotern Motivation Produktion in der Automobilindustrie: ca. 49% der elektrischen Energie wird von Industrierobotern benötigt davon
ENTWICKLUNG EINES BIOSINSPIRIERTEN GELENKARMROBOTERS MITHILFE DER KOPPLUNG VON MEHRKÖRPERSIMULATION UND TOPOLOGIEOPTIMIERUNG
 ENTWICKLUNG EINES BIOSINSPIRIERTEN GELENKARMROBOTERS MITHILFE DER KOPPLUNG VON MEHRKÖRPERSIMULATION UND TOPOLOGIEOPTIMIERUNG 35. CADFEM ANSYS SIMULATION CONFERENCE, KOBLENZ, 16.11.2017 Dipl.-Ing. Marcel
ENTWICKLUNG EINES BIOSINSPIRIERTEN GELENKARMROBOTERS MITHILFE DER KOPPLUNG VON MEHRKÖRPERSIMULATION UND TOPOLOGIEOPTIMIERUNG 35. CADFEM ANSYS SIMULATION CONFERENCE, KOBLENZ, 16.11.2017 Dipl.-Ing. Marcel
Einsatz von Simulationswerkzeugen beim Entwurf feinwerktechnischer Systeme. Beispiele aus der Forschung am IFTE
 Fakultät Elektrotechnik, Institut für Feinwerktechnik und Elektronik-Design Einsatz von Simulationswerkzeugen beim Entwurf feinwerktechnischer Systeme Beispiele aus der Forschung am IFTE Dr.-Ing. J. Gaßmann
Fakultät Elektrotechnik, Institut für Feinwerktechnik und Elektronik-Design Einsatz von Simulationswerkzeugen beim Entwurf feinwerktechnischer Systeme Beispiele aus der Forschung am IFTE Dr.-Ing. J. Gaßmann
Effiziente Methoden zur parametrischen Gestaltoptimierung von Strömungskanälen. Mohammad Rustaee ISKO engineers
 Effiziente Methoden zur parametrischen Gestaltoptimierung von Strömungskanälen Mohammad Rustaee ISKO engineers ISKO engineers Kernkompetenzen Software Leistungsfähige CAE-Softwarelösungen für jeden Bedarf
Effiziente Methoden zur parametrischen Gestaltoptimierung von Strömungskanälen Mohammad Rustaee ISKO engineers ISKO engineers Kernkompetenzen Software Leistungsfähige CAE-Softwarelösungen für jeden Bedarf
Inverse Kinematik am Robotersimulationsprogramm
 Inverse Kinematik am Robotersimulationsprogramm EASY-ROB Problemstellung Kinematiken in EASY-ROB Vorwärtstransformation Inverse Transformation Numerisches Lösungsverfahren zur inversen Transformation Kombination
Inverse Kinematik am Robotersimulationsprogramm EASY-ROB Problemstellung Kinematiken in EASY-ROB Vorwärtstransformation Inverse Transformation Numerisches Lösungsverfahren zur inversen Transformation Kombination
Mathematische Modellierung der Kostenund Wirkungszusammenhänge eines regionalen Energieverbundes
 Mathematische Modellierung der Kostenund Wirkungszusammenhänge eines regionalen Energieverbundes Bestimmung des ökonomischen Nutzens von Energiespeichern Michael Hassler eines regionalen Energieverbundes
Mathematische Modellierung der Kostenund Wirkungszusammenhänge eines regionalen Energieverbundes Bestimmung des ökonomischen Nutzens von Energiespeichern Michael Hassler eines regionalen Energieverbundes
AUTONOMES KREISELSTABILISIERTES FAHRRAD
 AUTONOMES KREISELSTABILISIERTES FAHRRAD Adaption der Hardware Leistungselektronik Anordnung der Kreisel Messung der Radwinkel für Geschwindigkeitsregelung Optischer Aufputz System Adde Modellbildung Fahrrad
AUTONOMES KREISELSTABILISIERTES FAHRRAD Adaption der Hardware Leistungselektronik Anordnung der Kreisel Messung der Radwinkel für Geschwindigkeitsregelung Optischer Aufputz System Adde Modellbildung Fahrrad
Bessere Therapieplanung durch komplexe kinetische Analysen nach Schlaganfall? Mario Siebler MediClin Fachklinik Rhein/Ruhr
 Bessere Therapieplanung durch komplexe kinetische Analysen nach Schlaganfall? Mario Siebler MediClin Fachklinik Rhein/Ruhr Dominik Raab Universität Duisburg-Essen 2. NRW-Forum Rehabilitationsensomotorischer
Bessere Therapieplanung durch komplexe kinetische Analysen nach Schlaganfall? Mario Siebler MediClin Fachklinik Rhein/Ruhr Dominik Raab Universität Duisburg-Essen 2. NRW-Forum Rehabilitationsensomotorischer
Steuerung serieller Manipulatoren
 Klaus Janschek Steuerung serieller Manipulatoren Sommersemester 2014 K. Janschek - SS 2014 Inhalt, Literatur & Ablauf 0 INHALT RS01 EINFÜHRUNG INDUSTRIEROBOTIK 1.1 Robotersysteme Begriffsbestimmung 1.2
Klaus Janschek Steuerung serieller Manipulatoren Sommersemester 2014 K. Janschek - SS 2014 Inhalt, Literatur & Ablauf 0 INHALT RS01 EINFÜHRUNG INDUSTRIEROBOTIK 1.1 Robotersysteme Begriffsbestimmung 1.2
Robotik. Prüfung. Prüfer Note
 Prüfung Robotik Anmerkungen: Nur Blätter mit Namen und Matr.Nr. werden korrigiert. Keine rote Farbe verwenden. Zu jeder Lösung Aufgabennummer angeben. Aufgabe max. Punkte 1 a) 3 b) 2 c) 6 d) 3 e) 3 2 a)
Prüfung Robotik Anmerkungen: Nur Blätter mit Namen und Matr.Nr. werden korrigiert. Keine rote Farbe verwenden. Zu jeder Lösung Aufgabennummer angeben. Aufgabe max. Punkte 1 a) 3 b) 2 c) 6 d) 3 e) 3 2 a)
Hylight Innovative Hybrid-Leichtbautechnologie für die Automobilindustrie
 Hylight Innovative Hybrid-Leichtbautechnologie für die Automobilindustrie Hochschule trifft Mittelstand 13. Juli 2011 IKV, Campus Melaten, Aachen Dipl.-Ing. Klaus Küsters Gliederung Anwendung von Hybridbauteilen
Hylight Innovative Hybrid-Leichtbautechnologie für die Automobilindustrie Hochschule trifft Mittelstand 13. Juli 2011 IKV, Campus Melaten, Aachen Dipl.-Ing. Klaus Küsters Gliederung Anwendung von Hybridbauteilen
Modell zur Einflussanalyse Ein Modell zur Einflussanalyse von Methodenänderungen in Entwicklungsprozessen
 Modell zur Einflussanalyse Ein Modell zur Einflussanalyse von Methodenänderungen in Entwicklungsprozessen Roland Koppe, Stefan Häusler, Axel Hahn 2 Übersicht Einleitung und Motivation Ansatz und Methodik
Modell zur Einflussanalyse Ein Modell zur Einflussanalyse von Methodenänderungen in Entwicklungsprozessen Roland Koppe, Stefan Häusler, Axel Hahn 2 Übersicht Einleitung und Motivation Ansatz und Methodik
Projekttage Wissenschaft Schülerinnen und Schüler besuchen die TU Darmstadt
 Projekttage Wissenschaft Schülerinnen und Schüler besuchen die TU Darmstadt Kooperationsprojekt zwischen dem Schulamt Bergstraße/Odenwaldkreis und der Graduiertenschule CE Technische Universität Darmstadt
Projekttage Wissenschaft Schülerinnen und Schüler besuchen die TU Darmstadt Kooperationsprojekt zwischen dem Schulamt Bergstraße/Odenwaldkreis und der Graduiertenschule CE Technische Universität Darmstadt
Statisches und dynamisches Verhalten eines fünfachsigen Bearbeitungszentrums. - Berechnung der 4. Entwurfs - Dr.-Ing. Rouven Meidlinger.
 Statisches und dynamisches Verhalten eines fünfachsigen Bearbeitungszentrums - Berechnung der 4. Entwurfs - Dr.-Ing. Rouven Meidlinger planlauf GmbH Gliederung Einleitung und Aufgabenstellung Statisches
Statisches und dynamisches Verhalten eines fünfachsigen Bearbeitungszentrums - Berechnung der 4. Entwurfs - Dr.-Ing. Rouven Meidlinger planlauf GmbH Gliederung Einleitung und Aufgabenstellung Statisches
Rastkräfte bei Lineardirektantrieben ein Vergleich geometrischer und elektronischer Kompensationsmöglichkeiten
 Institut für Konstruktion und Fertigung in der Feinwerktechnik Universität Stuttgart Rastkräfte bei Lineardirektantrieben ein Vergleich geometrischer und elektronischer Kompensationsmöglichkeiten Dipl.-Ing.
Institut für Konstruktion und Fertigung in der Feinwerktechnik Universität Stuttgart Rastkräfte bei Lineardirektantrieben ein Vergleich geometrischer und elektronischer Kompensationsmöglichkeiten Dipl.-Ing.
Statisches und dynamisches Verhalten des 5-Achsen-Roboters JN Eignung für das Fräsen von Stahl -
 Statisches und dynamisches Verhalten des 5-Achsen-Roboters JN2014 - Eignung für das Fräsen von Stahl - Dr.-Ing. Rouven Meidlinger planlauf GmbH Gliederung Einleitung und Aufgabenstellung Statisches Verhalten
Statisches und dynamisches Verhalten des 5-Achsen-Roboters JN2014 - Eignung für das Fräsen von Stahl - Dr.-Ing. Rouven Meidlinger planlauf GmbH Gliederung Einleitung und Aufgabenstellung Statisches Verhalten
Energiemanagementsystem Wasserversorgung
 EWave Energiemanagementsystem Wasserversorgung Prof. Dr. Alexander Martin Lehrstuhl für Wirtschaftsmathematik, FAU Erlangen-Nürnberg ERWAS Statuskonferenz, Philharmonie Essen, 2. Februar 2016 Partner:
EWave Energiemanagementsystem Wasserversorgung Prof. Dr. Alexander Martin Lehrstuhl für Wirtschaftsmathematik, FAU Erlangen-Nürnberg ERWAS Statuskonferenz, Philharmonie Essen, 2. Februar 2016 Partner:
Inhaltsverzeichnis 1 Einleitung 1 2 Elastische Mehrkörpersysteme Modellierung Kinematik elastischer Mehrkör
 Studienarbeit STUD 185 Transiente Spannungssimulationen mit modalen Spannungsmatrizen von Michael Peić Betreuer: Prof. Dr. Ing. W. Schiehlen Dipl. Ing. H. Claus Universität Stuttgart Institut B für Mechanik
Studienarbeit STUD 185 Transiente Spannungssimulationen mit modalen Spannungsmatrizen von Michael Peić Betreuer: Prof. Dr. Ing. W. Schiehlen Dipl. Ing. H. Claus Universität Stuttgart Institut B für Mechanik
Dipl.-Ing. Christoph Erath 10. November FVM-BEM Kopplung. Was gewinnen wir, wenn wir zwei numerische Methoden miteinander koppeln?
 Dipl.-Ing. Christoph Erath 10. November 2007 FVM-BEM Kopplung Was gewinnen wir, wenn wir zwei numerische Methoden miteinander koppeln? Seite 2 FVM-BEM Kopplung 10. November 2007 Dipl.-Ing. Christoph Erath
Dipl.-Ing. Christoph Erath 10. November 2007 FVM-BEM Kopplung Was gewinnen wir, wenn wir zwei numerische Methoden miteinander koppeln? Seite 2 FVM-BEM Kopplung 10. November 2007 Dipl.-Ing. Christoph Erath
DISSERTATION. Nichtlineare Analyse und Klassifikation von instationären Biosignalen mit Anwendung in der Kognitionsforschung
 Technische Universität Ilmenau DISSERTATION Nichtlineare Analyse und Klassifikation von instationären Biosignalen mit Anwendung in der Kognitionsforschung zur Erlangung des akademischen Grades Doktor-Ingenieur
Technische Universität Ilmenau DISSERTATION Nichtlineare Analyse und Klassifikation von instationären Biosignalen mit Anwendung in der Kognitionsforschung zur Erlangung des akademischen Grades Doktor-Ingenieur
SolidLine-Launch-Day , Rodgau. Thema: virtuelle Produktentwicklung am Beispiel der KIESER AG, Zürich. daskernteam GbR, Modautal Start
 SolidLine-Launch-Day 08.10.2009, Rodgau Vortrag: Fit für Fitness Thema: virtuelle Produktentwicklung am Beispiel der KIESER AG, Zürich Autor: daskernteam GbR, Modautal Start Fit für Fitness virtuelle Produktentwicklung
SolidLine-Launch-Day 08.10.2009, Rodgau Vortrag: Fit für Fitness Thema: virtuelle Produktentwicklung am Beispiel der KIESER AG, Zürich Autor: daskernteam GbR, Modautal Start Fit für Fitness virtuelle Produktentwicklung
Anwendungsbeispiel 2 Optimierung eines Drehprozesses. Anja Fischer TU Dortmund
 Anwendungsbeispiel 2 Optimierung eines Drehprozesses Anja Fischer TU Dortmund in Zusammenarbeit mit S. Goller, U. Götze et al. Problemstellung Modellierung Drehprozess Mehrschrittmodell Ergebnis Optimierung
Anwendungsbeispiel 2 Optimierung eines Drehprozesses Anja Fischer TU Dortmund in Zusammenarbeit mit S. Goller, U. Götze et al. Problemstellung Modellierung Drehprozess Mehrschrittmodell Ergebnis Optimierung
Modellbasierte Softwareentwicklung eines Kamera basierten Scheinwerfer-Adaptions-Algorithmus. Gerd Mauthe
 Modellbasierte Softwareentwicklung eines Kamera basierten Scheinwerfer-Adaptions-Algorithmus Gerd Mauthe München 10.05.2016 MATLAB Expo 2016 Inhalte Vorstellung Thema Algorithmus Konzepte Implementierung
Modellbasierte Softwareentwicklung eines Kamera basierten Scheinwerfer-Adaptions-Algorithmus Gerd Mauthe München 10.05.2016 MATLAB Expo 2016 Inhalte Vorstellung Thema Algorithmus Konzepte Implementierung
Modellprädiktive Regelung nichtlinearer sampled-data Systeme
 Modellprädiktive Regelung nichtlinearer sampled-data Systeme L. Grüne 1 D. Nešić 2 J. Pannek 1 1 Mathematisches Institut Universität Bayreuth 2 EEE Department University of Melbourne 13. Februar 2006 Workshop
Modellprädiktive Regelung nichtlinearer sampled-data Systeme L. Grüne 1 D. Nešić 2 J. Pannek 1 1 Mathematisches Institut Universität Bayreuth 2 EEE Department University of Melbourne 13. Februar 2006 Workshop
Kooperationsvertrag GSI / TU Darmstadt Regelungstheoretische Analysen von HF-Regelungen für Synchrotrons
 Regelungstheoretische Analysen von HF-Regelungen für Synchrotrons Analyse von HF-Regelungen zur Dämpfung longitudinaler kohärenter Moden, Spezifikationen für Kavitätenregelkreise für das SIS18-Upgrade
Regelungstheoretische Analysen von HF-Regelungen für Synchrotrons Analyse von HF-Regelungen zur Dämpfung longitudinaler kohärenter Moden, Spezifikationen für Kavitätenregelkreise für das SIS18-Upgrade
Einführung in CAE-Systeme
 Einführung in CAE-Systeme Dipl.-Ing. Mark Müller 1 Inhalt 1. Motivation für CAE-Werkzeuge 2. Modellierung technischer Prozesse 3. Übersicht über CAE-Simulationssysteme Kommerzielle Programme Freeware 4.
Einführung in CAE-Systeme Dipl.-Ing. Mark Müller 1 Inhalt 1. Motivation für CAE-Werkzeuge 2. Modellierung technischer Prozesse 3. Übersicht über CAE-Simulationssysteme Kommerzielle Programme Freeware 4.
Erweiterung eines Verfahrens zur automatisierten Parameteridentifikation eines Fahrzeugmodells
 Erweiterung eines Verfahrens zur automatisierten Parameteridentifikation eines Fahrzeugmodells Sebastian Wildfeuer Parameteridentifikation > 23. September 2008 > Folie 1 Themenübersicht Ausgangssituation,
Erweiterung eines Verfahrens zur automatisierten Parameteridentifikation eines Fahrzeugmodells Sebastian Wildfeuer Parameteridentifikation > 23. September 2008 > Folie 1 Themenübersicht Ausgangssituation,
Mehrzielige Bahnoptimierung mit MOPS DGLR Workshop Umweltfreundliches Fliegen
 Multi-Objective Trajectory Optimization Methods within DLR-RM Mehrzielige Bahnoptimierung mit MOPS DGLR Workshop Umweltfreundliches Fliegen Reiko Müller DLR-RM Folie 1 Optimierungsmethoden im Institut
Multi-Objective Trajectory Optimization Methods within DLR-RM Mehrzielige Bahnoptimierung mit MOPS DGLR Workshop Umweltfreundliches Fliegen Reiko Müller DLR-RM Folie 1 Optimierungsmethoden im Institut
SFB 438. Modellierung und Simulation von Mikropumpen. Miriam Mehl. Institut für Informatik V, TU München. München, 18. März 2003
 Modellierung und Simulation von Mikropumpen Miriam Mehl Institut für Informatik V, TU München Ziel: Effiziente und schonende Trennung von Teilchen unterhalb der Mikrometerskala wichtig für Nanotechnologie
Modellierung und Simulation von Mikropumpen Miriam Mehl Institut für Informatik V, TU München Ziel: Effiziente und schonende Trennung von Teilchen unterhalb der Mikrometerskala wichtig für Nanotechnologie
LASERUNTERSTÜTZTES FRÄSEN MÜNCHEN, LEARNSHOPS METALL MÜNCHEN 2013 ROBERT WIEDENMANN
 LASERUNTERSTÜTZTES FRÄSEN MÜNCHEN, 06.03.2013 LEARNSHOPS METALL MÜNCHEN 2013 ROBERT WIEDENMANN Gliederung des Vortrags 1. Vorstellung des iwb 2. Situation in der spanenden Bearbeitung 3. Prozessmodell
LASERUNTERSTÜTZTES FRÄSEN MÜNCHEN, 06.03.2013 LEARNSHOPS METALL MÜNCHEN 2013 ROBERT WIEDENMANN Gliederung des Vortrags 1. Vorstellung des iwb 2. Situation in der spanenden Bearbeitung 3. Prozessmodell
Einführung in die Robotik. Jianwei Zhang
 - Jianwei Zhang zhang@informatik.uni-hamburg.de Fakultät für Mathematik, Informatik und Naturwissenschaften Technische Aspekte Multimodaler Systeme 19. April 2011 J. Zhang 63 Gliederung Allgemeine Informationen
- Jianwei Zhang zhang@informatik.uni-hamburg.de Fakultät für Mathematik, Informatik und Naturwissenschaften Technische Aspekte Multimodaler Systeme 19. April 2011 J. Zhang 63 Gliederung Allgemeine Informationen
1 Einleitung Historie Elemente der Mehrkörperdynamik Anwendungsgebiete... 3 Literatur... 4
 Inhaltsverzeichnis 1 Einleitung... 1 1.1 Historie... 1 1.2 Elemente der Mehrkörperdynamik... 2 1.3 Anwendungsgebiete... 3 Literatur... 4 2 Dynamik des starren Körpers... 5 2.1 Lagebeschreibung... 6 2.1.1
Inhaltsverzeichnis 1 Einleitung... 1 1.1 Historie... 1 1.2 Elemente der Mehrkörperdynamik... 2 1.3 Anwendungsgebiete... 3 Literatur... 4 2 Dynamik des starren Körpers... 5 2.1 Lagebeschreibung... 6 2.1.1
SCHERDEL SpringDesigner
 SCHERDEL SpringDesigner Moderne GUIs und strukturmechanische Simulation technischer Federn Johannes Blödt INHALT DIE SCHERDEL GRUPPE MOTIVATION: TECHNISCHE FEDER UND GEOMETRIEBASIERTER MODELLANSATZ GRAPHICAL
SCHERDEL SpringDesigner Moderne GUIs und strukturmechanische Simulation technischer Federn Johannes Blödt INHALT DIE SCHERDEL GRUPPE MOTIVATION: TECHNISCHE FEDER UND GEOMETRIEBASIERTER MODELLANSATZ GRAPHICAL
Bestandsaufnahme und Arbeit an einer Alpha-Version des Saros- Plugins für die IntelliJ-Plattform
 Tobias Bouschen Institut für Informatik der Freien Universität Berlin, Arbeitsgruppe Software Engineering Bestandsaufnahme und Arbeit an einer Alpha-Version des Saros- Plugins für die IntelliJ-Plattform
Tobias Bouschen Institut für Informatik der Freien Universität Berlin, Arbeitsgruppe Software Engineering Bestandsaufnahme und Arbeit an einer Alpha-Version des Saros- Plugins für die IntelliJ-Plattform
Inverse Kinematik. Daniela Steidl TU München Zusammenfassung
 Inverse Kinematik Daniela Steidl TU München 10. 07. 2011 Zusammenfassung Sowohl in Computer Graphik als auch in der Robotik werden häufig Simulationen von Mehrkörpersystemen benötigt. Dazu gibt man die
Inverse Kinematik Daniela Steidl TU München 10. 07. 2011 Zusammenfassung Sowohl in Computer Graphik als auch in der Robotik werden häufig Simulationen von Mehrkörpersystemen benötigt. Dazu gibt man die
- Gegenüberstellung der Entwürfe 1 bis 4 -
 Statisches und dynamisches Verhalten eines fünfachsigen Bearbeitungszentrums - Gegenüberstellung der Entwürfe 1 bis 4 - Dr.-Ing. Rouven Meidlinger planlauf GmbH Gliederung Einleitung und Aufgabenstellung
Statisches und dynamisches Verhalten eines fünfachsigen Bearbeitungszentrums - Gegenüberstellung der Entwürfe 1 bis 4 - Dr.-Ing. Rouven Meidlinger planlauf GmbH Gliederung Einleitung und Aufgabenstellung
Modulares Koordinatentransformations- und Bahninterpolationsmodell für f r redundante Roboterkinematiken
 Im Namen Allahs des Gnädigen des Barmherzigen Modulares Koordinatentransformations- und Bahninterpolationsmodell für f r redundante Roboterkinematiken Projektleiter : Referant: Prof. Dr. Ing. habil P.
Im Namen Allahs des Gnädigen des Barmherzigen Modulares Koordinatentransformations- und Bahninterpolationsmodell für f r redundante Roboterkinematiken Projektleiter : Referant: Prof. Dr. Ing. habil P.
EINLEITUNG MAGNETSCHWEBETECHNIK
 EINLEITUNG Magnetschwebebahnen sind Transportmittel der Zukunft. Hohe Beschleunigungen und Geschwindigkeiten bedeuten eine Verbesserung der Mobilität im Transportwesen. Die Probleme dieser noch jungen
EINLEITUNG Magnetschwebebahnen sind Transportmittel der Zukunft. Hohe Beschleunigungen und Geschwindigkeiten bedeuten eine Verbesserung der Mobilität im Transportwesen. Die Probleme dieser noch jungen
STORYBOARDING ZUR ABLEITUNG VON KONTEXTBASIERTEN INTERACTION-CASES FÜR UBIQUITÄRE SYSTEME
 Fakultät Informatik Institut für Software- und Multimediatechnik Juniorprofessur Software Engineering Ubiquitärer STORYBOARDING ZUR ABLEITUNG VON KONTEXTBASIERTEN INTERACTION-CASES FÜR UBIQUITÄRE SYSTEME
Fakultät Informatik Institut für Software- und Multimediatechnik Juniorprofessur Software Engineering Ubiquitärer STORYBOARDING ZUR ABLEITUNG VON KONTEXTBASIERTEN INTERACTION-CASES FÜR UBIQUITÄRE SYSTEME
Themen für Bachelorprojekte und Bachelorarbeiten Lehrstuhl Prof. Dr. Pohl, Software Systems Engineering
 Themen für Bachelorprojekte und Bachelorarbeiten Lehrstuhl Prof. Dr. Pohl, Software Systems Engineering 11.07.2018 Vergleich von Metriken zur Bewertung der Genauigkeit binärer Prozessprognosen anhand eines
Themen für Bachelorprojekte und Bachelorarbeiten Lehrstuhl Prof. Dr. Pohl, Software Systems Engineering 11.07.2018 Vergleich von Metriken zur Bewertung der Genauigkeit binärer Prozessprognosen anhand eines
der klügere Roboter gibt nach BioRob Leichtbauroboter Für die sichere Mensch-Roboter-Kooperation
 der klügere Roboter gibt nach BioRob Leichtbauroboter Für die sichere Mensch-Roboter-Kooperation DIE EVOLUTION DER ROBOTIK BioRob reicht die Hand. Ein Roboter darf kein menschliches Wesen verletzen [...]
der klügere Roboter gibt nach BioRob Leichtbauroboter Für die sichere Mensch-Roboter-Kooperation DIE EVOLUTION DER ROBOTIK BioRob reicht die Hand. Ein Roboter darf kein menschliches Wesen verletzen [...]
Vom virtuellen Prototyp zum digitalen Zwilling
 Vom virtuellen Prototyp zum digitalen Zwilling Dr. Markus Schörgenhumer Area Mechanics and Control markus.schoergenhumer@lcm.at Seite 1 Inhaltsüberblick Einführung Modellbasierte Entwicklung und virtuelle
Vom virtuellen Prototyp zum digitalen Zwilling Dr. Markus Schörgenhumer Area Mechanics and Control markus.schoergenhumer@lcm.at Seite 1 Inhaltsüberblick Einführung Modellbasierte Entwicklung und virtuelle
Vorsprung in Sekunden
 Potenziale virtueller Werkzeugmaschinen zur Konstruktion, Analyse und Optimierung von Fertigungsanlagen und -prozessen Dr.-Ing. Claus Eppler Forschung und Entwicklung 13. Berliner Runde / 01.03. - 02.03.18
Potenziale virtueller Werkzeugmaschinen zur Konstruktion, Analyse und Optimierung von Fertigungsanlagen und -prozessen Dr.-Ing. Claus Eppler Forschung und Entwicklung 13. Berliner Runde / 01.03. - 02.03.18
LEWA Pulsationsstudien. Zur Analyse von Rohrleitungssystemen.
 LEWA Pulsationsstudien Zur Analyse von Rohrleitungssystemen. LEWA Pulsationsstudien Einleitung LEWA Pulsationsstudien Einleitung 01 Speziell bei oszillierenden Verdrängerpumpen muss die Wechselwirkung
LEWA Pulsationsstudien Zur Analyse von Rohrleitungssystemen. LEWA Pulsationsstudien Einleitung LEWA Pulsationsstudien Einleitung 01 Speziell bei oszillierenden Verdrängerpumpen muss die Wechselwirkung
Physikalisch-Technische Bundesanstalt
 Physikalisch-Technische Bundesanstalt Mechanik und Akustik PTB-MA-77 Braunschweig, Januar 2006 Oliver Mack Verhalten piezoelektrischer Kraftaufnehmer unter Wirkung mechanischer Einflussgrößen Von der Fakultät
Physikalisch-Technische Bundesanstalt Mechanik und Akustik PTB-MA-77 Braunschweig, Januar 2006 Oliver Mack Verhalten piezoelektrischer Kraftaufnehmer unter Wirkung mechanischer Einflussgrößen Von der Fakultät
1.4! Einführung. Systemmodellierung. Methoden und Werkzeuge
 Einführung. Vorbemerkungen und Überblick. Die elektronischen e des Fahrzeugs. Prozesse in der Fahrzeugentwicklung im Überblick,.4 Grundlagen. Steuerungs- und regelungstechnische e (Prof. Schumacher). Diskrete
Einführung. Vorbemerkungen und Überblick. Die elektronischen e des Fahrzeugs. Prozesse in der Fahrzeugentwicklung im Überblick,.4 Grundlagen. Steuerungs- und regelungstechnische e (Prof. Schumacher). Diskrete
Simulation von Flüssigkeitsbrücken zwischen Nanopartikeln
 Simulation von Flüssigkeitsbrücken zwischen Nanopartikeln Michael Dörmann, Hans-Joachim Schmid Lehrstuhl für Partikelverfahrenstechnik Universität Paderborn 03.04.2014 Agenda Motivation Methode Ergebnisse
Simulation von Flüssigkeitsbrücken zwischen Nanopartikeln Michael Dörmann, Hans-Joachim Schmid Lehrstuhl für Partikelverfahrenstechnik Universität Paderborn 03.04.2014 Agenda Motivation Methode Ergebnisse
Ableitung thermischer Randbedingungen für lineare Antriebseinheiten
 Ableitung thermischer Randbedingungen für lineare Antriebseinheiten Dipl.-Ing. Matthias Ulmer, Prof. Dr.-Ing. Wolfgang Schinköthe Universität Stuttgart, Institut für Konstruktion und Fertigung in der Feinwerktechnik
Ableitung thermischer Randbedingungen für lineare Antriebseinheiten Dipl.-Ing. Matthias Ulmer, Prof. Dr.-Ing. Wolfgang Schinköthe Universität Stuttgart, Institut für Konstruktion und Fertigung in der Feinwerktechnik
ES-Projektseminar SS2011
 ES-Projektseminar SS2011 Team Predator Daniel Steinmetzer Daniel Demmler David Meier Jan Andresen ES Real-Time Systems Lab Prof. Dr. rer. nat. Andy Schürr Dept. of Electrical Engineering and Information
ES-Projektseminar SS2011 Team Predator Daniel Steinmetzer Daniel Demmler David Meier Jan Andresen ES Real-Time Systems Lab Prof. Dr. rer. nat. Andy Schürr Dept. of Electrical Engineering and Information
Optimierung des dynamischen Verhaltens netzstützender Anlagen am Beispiel der Virtuellen Synchronmaschine
 1 / 12 Optimierung des dynamischen Verhaltens netzstützender Anlagen am Beispiel der Virtuellen Synchronmaschine EnInnov 2014, Session E2 Timo Dewenter 1, Benjamin Werther 2, Alexander K. Hartmann 1 und
1 / 12 Optimierung des dynamischen Verhaltens netzstützender Anlagen am Beispiel der Virtuellen Synchronmaschine EnInnov 2014, Session E2 Timo Dewenter 1, Benjamin Werther 2, Alexander K. Hartmann 1 und
Berechnung kinematischer Getriebeabmessungen zur Kalibrierung von Führungsgetrieben durch Messung
 SAXSIM 03 Mathcad Workshop Berechnung kinematischer Getriebeabmessungen zur Kalibrierung von Führungsgetrieben durch Messung (praktische Anwendung von Newton-Verfahren und Singulärwertzerlegung) Referent:
SAXSIM 03 Mathcad Workshop Berechnung kinematischer Getriebeabmessungen zur Kalibrierung von Führungsgetrieben durch Messung (praktische Anwendung von Newton-Verfahren und Singulärwertzerlegung) Referent:
Sensitivitäts- und Robustheitsanalyse beim Clinchen dicker Stahlbleche
 Sensitivitäts- und Robustheitsanalyse beim Clinchen dicker Stahlbleche Von der Fakultät für Maschinenbau der Technischen Universität Chemnitz genehmigte Dissertation zur Erlangung des akademischen Grades
Sensitivitäts- und Robustheitsanalyse beim Clinchen dicker Stahlbleche Von der Fakultät für Maschinenbau der Technischen Universität Chemnitz genehmigte Dissertation zur Erlangung des akademischen Grades
CE-Bachelor Studiengang
 CE-Bachelor Studiengang Vertiefungsrichtung Informatik Prof. Dr. Felix Wolf 3/7/17 Vertiefungsrichtung Informatik 1 Studienplan CE (Bachelor) Semester 5-6 5 Fachrichtungen Semester 1-4 Gemeinsame Grundlagenfächer
CE-Bachelor Studiengang Vertiefungsrichtung Informatik Prof. Dr. Felix Wolf 3/7/17 Vertiefungsrichtung Informatik 1 Studienplan CE (Bachelor) Semester 5-6 5 Fachrichtungen Semester 1-4 Gemeinsame Grundlagenfächer
Regelung eines inversen Pendels
 Regelung eines inversen Pendels Dr.-Ing. Michael Buchholz 29.10.2010 Institut für Mess-, Regel- und Mikrotechnik NI Dozenten- und Ausbildertag 2010 Fürstenfeldbruck Seite 2 Anwendungsgebiete in der Forschung
Regelung eines inversen Pendels Dr.-Ing. Michael Buchholz 29.10.2010 Institut für Mess-, Regel- und Mikrotechnik NI Dozenten- und Ausbildertag 2010 Fürstenfeldbruck Seite 2 Anwendungsgebiete in der Forschung
Digitaler Zwilling eines Tripod-Roboters in der Verpackungstechnik
 Digitaler Zwilling eines Tripod-Roboters in der Verpackungstechnik -MATLAB EXPO 2018- Benedikt Böttcher 2 KRONES Group Agenda KRONES Übersicht über den Tripod-Roboter Ziele und Herausforderungen bei der
Digitaler Zwilling eines Tripod-Roboters in der Verpackungstechnik -MATLAB EXPO 2018- Benedikt Böttcher 2 KRONES Group Agenda KRONES Übersicht über den Tripod-Roboter Ziele und Herausforderungen bei der
ANBINDUNG KUNDENSEITIGER-TOOLCHAIN ZUR PARAMETRIERUNG VON MECHATRONISCHEN GESAMTSYSTEM-MODELLEN
 ANBINDUNG KUNDENSEITIGER-TOOLCHAIN ZUR PARAMETRIERUNG VON MECHATRONISCHEN GESAMTSYSTEM-MODELLEN Fraunhofer-Einrichtung Entwurfstechnik Mechatronik IEM Dr.-Ing Christian Henke, Dipl.-Ing. Thorsten Gehrmann
ANBINDUNG KUNDENSEITIGER-TOOLCHAIN ZUR PARAMETRIERUNG VON MECHATRONISCHEN GESAMTSYSTEM-MODELLEN Fraunhofer-Einrichtung Entwurfstechnik Mechatronik IEM Dr.-Ing Christian Henke, Dipl.-Ing. Thorsten Gehrmann
Modellbasierte Software- Entwicklung eingebetteter Systeme
 Modellbasierte Software- Entwicklung eingebetteter Systeme Prof. Dr. Holger Schlingloff Institut für Informatik der Humboldt Universität und Fraunhofer Institut für offene Kommunikationssysteme FOKUS Folie
Modellbasierte Software- Entwicklung eingebetteter Systeme Prof. Dr. Holger Schlingloff Institut für Informatik der Humboldt Universität und Fraunhofer Institut für offene Kommunikationssysteme FOKUS Folie
Statisches und dynamisches Verhalten eines Bohrwerks
 Statisches und dynamisches Verhalten eines Bohrwerks - Berechnung der 2. Entwurfs - Dr.-Ing. Rouven Meidlinger planlauf GmbH Gliederung Einleitung und Aufgabenstellung Statisches Verhalten Dynamisches
Statisches und dynamisches Verhalten eines Bohrwerks - Berechnung der 2. Entwurfs - Dr.-Ing. Rouven Meidlinger planlauf GmbH Gliederung Einleitung und Aufgabenstellung Statisches Verhalten Dynamisches
Simpack-Echtzeitmodelle für eine Mehrprozessor-HIL Anwendung Uwe Heitz ZF Friedrichshafen AG. ZF Friedrichshafen AG, 2006
 Simpack-Echtzeitmodelle für eine Mehrprozessor-HIL Anwendung Uwe Heitz ZF Friedrichshafen AG ZF Friedrichshafen AG, 2006 Softwaretest bei ZF Friedrichshafen Testmethode HiL Prototyp Verbundtest SiL Hardware-in-the-Loop
Simpack-Echtzeitmodelle für eine Mehrprozessor-HIL Anwendung Uwe Heitz ZF Friedrichshafen AG ZF Friedrichshafen AG, 2006 Softwaretest bei ZF Friedrichshafen Testmethode HiL Prototyp Verbundtest SiL Hardware-in-the-Loop
Produktionsbasiertes Energiemanagement in der Lebensmittelindustrie
 Produktionsbasiertes Energiemanagement in der Lebensmittelindustrie Ansätze und Ergebnisse aus einem Forschungsprojekt, aufbereitet für die Lehrstuhl für Lebensmittelverpackungstechnik, Lehrstuhl für mathematische
Produktionsbasiertes Energiemanagement in der Lebensmittelindustrie Ansätze und Ergebnisse aus einem Forschungsprojekt, aufbereitet für die Lehrstuhl für Lebensmittelverpackungstechnik, Lehrstuhl für mathematische
Kostenoptimierter 700 bar H 2 -Tank
 Hessische Forschungskompetenzen im Bereich Wasserstoff- und Brennstoffzellentechnologie Kostenoptimierter 700 bar H 2 -Tank Wiesbaden, den 23.08.2012 Dipl.-Ing. N. Meyer Professor Dr.-Ing. H. Schürmann
Hessische Forschungskompetenzen im Bereich Wasserstoff- und Brennstoffzellentechnologie Kostenoptimierter 700 bar H 2 -Tank Wiesbaden, den 23.08.2012 Dipl.-Ing. N. Meyer Professor Dr.-Ing. H. Schürmann