Optimale Steuerung. Karoline Pelka, Christian Schmidt, Christoph Große Kracht. 13. Dezember 2012
|
|
|
- Rosa Voss
- vor 5 Jahren
- Abrufe
Transkript
1 13. Dezember 212
2 1 Einleitung Bang-Bang-Steuerung Berücksichtigung der Steuerung Minimierung des Steueraufwandes 7
3 Einleitung Ende des 17. Jahrhunderts Variationsrechnung (Brachistochrone)
4 Einleitung Ende des 17. Jahrhunderts Variationsrechnung (Brachistochrone) Ab ca. 195 Motivation entstammte Anfangs hauptsächlich der Luft- und Raumfahrt sowie dem Militär Verallgemeinerung der Variationsprobleme, indem zwischen Steuerungs- und Zustandsvariablen unterschieden wird
5 Einleitung Ende des 17. Jahrhunderts Variationsrechnung (Brachistochrone) Ab ca. 195 Motivation entstammte Anfangs hauptsächlich der Luft- und Raumfahrt sowie dem Militär Verallgemeinerung der Variationsprobleme, indem zwischen Steuerungs- und Zustandsvariablen unterschieden wird Heute Anwendung in diversen Bereichen Hochpräzisionssteuerung technischer Prozesse Optimierung von Unternehmensprozessen Produktionsprozesse in der Industrie
6 Einleitung Ende des 17. Jahrhunderts Variationsrechnung (Brachistochrone) Ab ca. 195 Motivation entstammte Anfangs hauptsächlich der Luft- und Raumfahrt sowie dem Militär Verallgemeinerung der Variationsprobleme, indem zwischen Steuerungs- und Zustandsvariablen unterschieden wird Heute Anwendung in diversen Bereichen Hochpräzisionssteuerung technischer Prozesse Optimierung von Unternehmensprozessen Produktionsprozesse in der Industrie...
7 Minimiere J = ϕ(x(t ), x(t f )) + tf t f (t, x(t), u(t))dt
8 Minimiere J = ϕ(x(t ), x(t f )) + tf t f (t, x(t), u(t))dt unter den Differentialgleichungsnebenbedingungen ẋ(t) = f (t, x(t), u(t)), t t t f,
9 Minimiere J = ϕ(x(t ), x(t f )) + tf t f (t, x(t), u(t))dt unter den Differentialgleichungsnebenbedingungen ẋ(t) = f (t, x(t), u(t)), t t t f, den Steuer- und Zustandsbeschränkungen u(t) [u a, u b ] t t t f, x(t) [x a, x b ] t t t f,
10 Minimiere J = ϕ(x(t ), x(t f )) + tf t f (t, x(t), u(t))dt unter den Differentialgleichungsnebenbedingungen ẋ(t) = f (t, x(t), u(t)), t t t f, den Steuer- und Zustandsbeschränkungen u(t) [u a, u b ] t t t f, x(t) [x a, x b ] t t t f, den Randbedingungen x(t ) = x, x(t f ) = x e
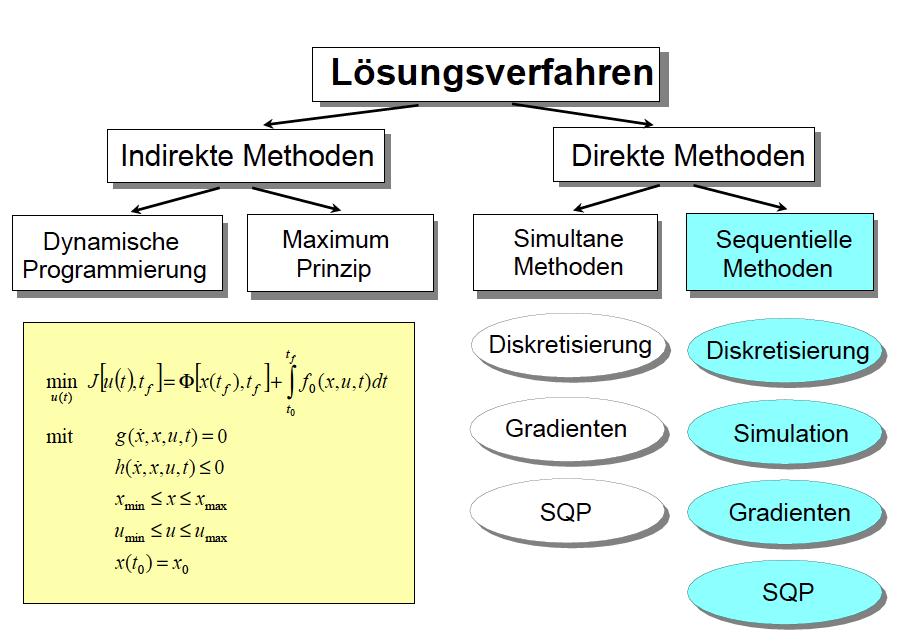
11 Allgemeine
12 Direktes Verfahren Diskrete Optimalsteuerungsprobleme Dynamik eines Prozesses in diskreter Form
13 Direktes Verfahren Diskrete Optimalsteuerungsprobleme Dynamik eines Prozesses in diskreter Form Beeinflussung nur an endlich vielen Stellen
14 Direktes Verfahren Diskrete Optimalsteuerungsprobleme Dynamik eines Prozesses in diskreter Form Beeinflussung nur an endlich vielen Stellen
15 Direktes Verfahren Diskrete Optimalsteuerungsprobleme Dynamik eines Prozesses in diskreter Form Beeinflussung nur an endlich vielen Stellen Gitter
16 Direktes Verfahren Diskrete Optimalsteuerungsprobleme Dynamik eines Prozesses in diskreter Form Beeinflussung nur an endlich vielen Stellen Gitter Zustandsgitterfunktion
17 Direktes Verfahren Diskrete Optimalsteuerungsprobleme Dynamik eines Prozesses in diskreter Form Beeinflussung nur an endlich vielen Stellen Gitter Zustandsgitterfunktion Steuergitterfunktion
18 Diskrete Optimalsteuerungsprobleme
19 Diskrete Optimalsteuerungsprobleme
20 Diskrete Optimalsteuerung am Beispiel des s
21 Es bezeichne t Zeit t [, t f ] x(t) Position des Wagens zum Zeitpunkt t v(t) Geschwindigkeit des Wagens zum Zeitpunkt t u(t) Beschleunigung des Wagens zum Zeitpunkt t, Steuerung Dynamik des Systems ist gegeben durch ẋ(t) = v(t) v(t) = u(t) mit x, x e, v, v e R gewünschte Anfangs- und Endbedingungen: x() = x, v() = v, x(t f ) = x e v(t f ) = v e
22 Ziel: Der Wagen soll an der vorgegebenen Endposition x e mit der Geschwindigkeit v e ankommen. Unterschiedliche Forderungen an das System Abhängig von diesen Forderungen unterschiedliches Zielfunktional J(u)
23 Mathematische Formulierung der
24 Mathematische Formulierung der min J(u) u(t)
25 Mathematische Formulierung der unter den Nebenbedingungen min J(u) u(t) x() = x, x(t f ) = x e v() = v, v(t f ) = v e
26 Mathematische Formulierung der unter den Nebenbedingungen min J(u) u(t) x() = x, x(t f ) = x e v() = v, v(t f ) = v e und den Steuerbeschränkung U b, d.h. U b u(t) U b
27 Mathematische Formulierung der unter den Nebenbedingungen min J(u) u(t) x() = x, x(t f ) = x e v() = v, v(t f ) = v e und den Steuerbeschränkung U b, d.h. U b u(t) U b Je nach Forderungen an das System werden sich x(t), v(t) und u(t) unterschiedlich verhalten.
28 In Matlab verwendete Funktionen Trapez-Regel zur Zeitintegration
29 In Matlab verwendete Funktionen Trapez-Regel zur Zeitintegration Euler-Verfahren zum Lösen von Anfangswertproblemen
30 In Matlab verwendete Funktionen Trapez-Regel zur Zeitintegration Euler-Verfahren zum Lösen von Anfangswertproblemen Runge-Kutta Stufe 4 als Alternative zum Euler-Verfahren
31 In Matlab verwendete Funktionen Trapez-Regel zur Zeitintegration Euler-Verfahren zum Lösen von Anfangswertproblemen Runge-Kutta Stufe 4 als Alternative zum Euler-Verfahren fmincon aus der Optimization-Toolbox zur Minimierung von J(u) unter Berücksichtigung von Beschränkungen an u.
32 Bang-Bang-Steuerung Berücksichtigung der Steuerung Minimierung des Steueraufwandes Ausschließliche Berücksichtigung der Position und Geschwindigkeit J = t f (x(t) x e ) 2 + (v(t) v e ) 2 dt (1) J wird minimal, wenn das Ziel möglichst schnell erreicht wird. Es ergibt sich die Bang-Bang-Steuerung.
33 Steuerung Steuerung zum Zeitpunkt Position Position zum Zeitpunkt Zeit[s] Geschwindigkeit Geschwindigkeit zum Zeitpunkt Zeit[s] Zeit[s] x e x = 7, t f = 5, 1 u 1 Bang-Bang-Steuerung: Steuerung bis zum Ziel stets an ihren Grenzen
34 Steuerung Steuerung zum Zeitpunkt Position Position zum Zeitpunkt Zeit[s] 3 Geschwindigkeit zum Zeitpunkt Zeit[s] Geschwindigkeit Zeit[s] x e x = 7, t f = 1, 1 u 1 Bang-Bang-Steuerung: Steuerung bis zum Ziel stets an ihren Grenzen
35 2 Steuerung zum Zeitpunkt 8 Position zum Zeitpunkt 1 6 Steuerung 1 2 Position 4 2 Geschwindigkeit Zeit[s] Geschwindigkeit zum Zeitpunkt Zeit[s] Zeit[s] x e x = 7, t f = 1, 2 u 2 Steuerung bis zum Ziel stets an ihren Grenzen Ziel wird schnell, aber mit großem Steuerungsaufwand erreicht
36 Bang-Bang-Steuerung Berücksichtigung der Steuerung Minimierung des Steueraufwandes Zusätzlich kann der Steuerungsaufwand berücksichtigt werden: J = t f (x(t) x e ) 2 + (v(t) v e ) 2 + λu 2 (t)dt (2) Im Auto-Beispiel bedeutet das: Vollgas führt zu hohem Spritverbrauch. Wie hoch die Kosten tatsächlich sind und wie viel Geld für Zeitersparnis gezahlt werden soll, lässt sich durch λ einstellen.
37 5 4 Steuerung zum Zeitpunkt 1 Position zum Zeitpunkt Steuerung Position Zeit[s] Geschwindigkeit Geschwindigkeit zum Zeitpunkt Zeit[s] Zeit[s] x e x = 1, t f = 1 1 u 1, λ =, 1 Starke Steuerung wird weitgehend vermieden.
38 2 Steuerung zum Zeitpunkt 15 Position zum Zeitpunkt 15 1 Steuerung 1 5 Position Zeit[s] Geschwindigkeit 1 5 Geschwindigkeit zum Zeitpunkt Zeit[s] Zeit[s] x e x = 1, t f = 1 1 u 1, λ =, 1 Starke Steuerung wird weitgehend vermieden. Mit erhöhtem Steueraufwand wird das Ziel schneller erreicht.
39 Bang-Bang-Steuerung Berücksichtigung der Steuerung Minimierung des Steueraufwandes Nur die Endposition und -geschwindigkeit wird Berücksichtigt: t f J = (x(t f ) x e ) 2 + (v(t f ) v e ) 2 + λ Die benötigte Zeit geht nicht mehr ein. u 2 (t)dt (3)
40 Steuerung Steuerung zum Zeitpunkt Zeit[s] Geschwindigkeit Geschwindigkeit zum Zeitpunkt Position Position zum Zeitpunkt Zeit[s] x e x = 5, t f = 5 2 u 2 Minimierung der Steuerung: Zeit wird voll ausgeschöpft Zeit[s]
41 Steuerung Steuerung zum Zeitpunkt Zeit[s] Geschwindigkeit Geschwindigkeit zum Zeitpunkt Zeit[s] Position Position zum Zeitpunkt Zeit[s] x e x = 5, t f = 5 2 u 2 Minimierung der Steuerung: Zeit wird voll ausgeschöpft Steuerung wird minimal
42 .4 Steuerung zum Zeitpunkt 5 Position zum Zeitpunkt Steuerung.2.2 Position Zeit[s] Geschwindigkeit Geschwindigkeit zum Zeitpunkt Zeit[s] Zeit[s] x e x = 5, t f = 1 2 u 2 Minimierung der Steuerung: Zeit wird voll ausgeschöpft Steuerung wird minimal
43 Endbedingungen Bewegungsgleichung 2. Ordnung lässt nur zwei Randbedingungen zu: Anfangsposition und -geschwindigkeit
44 Endbedingungen Bewegungsgleichung 2. Ordnung lässt nur zwei Randbedingungen zu: Anfangsposition und -geschwindigkeit Endbedingungen bisher mit im Zielfunktional
45 Endbedingungen Bewegungsgleichung 2. Ordnung lässt nur zwei Randbedingungen zu: Anfangsposition und -geschwindigkeit Endbedingungen bisher mit im Zielfunktional Problem: Von diesen Bedingungen kann die optimale Steuerung bei ungünstiger Gewichtung zugunsten der anderen Summanden abweichen.
46 Endbedingungen Bewegungsgleichung 2. Ordnung lässt nur zwei Randbedingungen zu: Anfangsposition und -geschwindigkeit Endbedingungen bisher mit im Zielfunktional Problem: Von diesen Bedingungen kann die optimale Steuerung bei ungünstiger Gewichtung zugunsten der anderen Summanden abweichen. Lösung: Übergabe der Endbedingung als feste Bedingung an fmnincon.
47 Indirekter Zugang Bisher: Diskretisierung von Anfang an
48 Indirekter Zugang Bisher: Diskretisierung von Anfang an Alternative Indirekter Zugang: Suche nach Bedingungen an die optimale Steuerung
49 Indirekter Zugang Bisher: Diskretisierung von Anfang an Alternative Indirekter Zugang: Suche nach Bedingungen an die optimale Steuerung Analytische Herleitung eines Gleichungssystems, das anschließend numerisch gelöst wird
50 Indirekter Zugang Bisher: Diskretisierung von Anfang an Alternative Indirekter Zugang: Suche nach Bedingungen an die optimale Steuerung Analytische Herleitung eines Gleichungssystems, das anschließend numerisch gelöst wird Stichworte: Hamilton-Funktion, adjungierter Zustand
Optimale Steuerung chemischer Batch-Reaktoren Praktikum Nichtlineare Modellierung in den Naturwissenschaften im WS 2012/13
 MÜNSTER Optimale Steuerung chemischer Batch-Reaktoren Praktikum Nichtlineare Modellierung in den Naturwissenschaften im WS 2012/13 Karoline Pelka Christian Schmidt Christoph Große Kracht 5. Februar 2013
MÜNSTER Optimale Steuerung chemischer Batch-Reaktoren Praktikum Nichtlineare Modellierung in den Naturwissenschaften im WS 2012/13 Karoline Pelka Christian Schmidt Christoph Große Kracht 5. Februar 2013
Hinreichende Bedingungen für Optimalsteuerungsprobleme mit nichtglatten Zuständen
 Hinreichende Bedingungen für Optimalsteuerungsprobleme mit nichtglatten Zuständen Ricki Rosendahl Schwerpunkt Optimierung und Approximation Department Mathematik - Universität Hamburg Hamburg, 10. April
Hinreichende Bedingungen für Optimalsteuerungsprobleme mit nichtglatten Zuständen Ricki Rosendahl Schwerpunkt Optimierung und Approximation Department Mathematik - Universität Hamburg Hamburg, 10. April
Optimale Steuerung eines linearen Servomotors
 mit Coulomb-Reibung und Zustandsbeschränkungen Bahne Christiansen, Helmut Maurer Oliver Zirn Universität Münster Institut für Numerische Mathematik University of Applied Sciences Giessen Kleinwalsertal,
mit Coulomb-Reibung und Zustandsbeschränkungen Bahne Christiansen, Helmut Maurer Oliver Zirn Universität Münster Institut für Numerische Mathematik University of Applied Sciences Giessen Kleinwalsertal,
14. Das Minimumprinzip
 H.J. Oberle Variationsrechnung u. Optimale Steuerung SoSe 2008 14. Das Minimumprinzip In diesem Abschnitt behandeln wir die Idee der dynamischen Programmierung, die auf Bellmann 31 (1957) zurückgeht und
H.J. Oberle Variationsrechnung u. Optimale Steuerung SoSe 2008 14. Das Minimumprinzip In diesem Abschnitt behandeln wir die Idee der dynamischen Programmierung, die auf Bellmann 31 (1957) zurückgeht und
Differentialgleichungen
 Differentialgleichungen Viele physikalische Probleme können mathematisch als gewöhnliche Differentialgleichungen formuliert werden nur eine unabhängige Variable (meist t), z.b. Bewegungsgleichungen: gleichmäßig
Differentialgleichungen Viele physikalische Probleme können mathematisch als gewöhnliche Differentialgleichungen formuliert werden nur eine unabhängige Variable (meist t), z.b. Bewegungsgleichungen: gleichmäßig
Berechnung von An- und Abflugrouten zur Lärmminimierung
 Berechnung lärmminimaler Flugrouten 1 Berechnung von An- und Abflugrouten zur Lärmminimierung M. Richter, M. Rieck, M. Bittner, J. Lenz, F. Holzapfel Technische Universität München 2. Juli 2013 Berechnung
Berechnung lärmminimaler Flugrouten 1 Berechnung von An- und Abflugrouten zur Lärmminimierung M. Richter, M. Rieck, M. Bittner, J. Lenz, F. Holzapfel Technische Universität München 2. Juli 2013 Berechnung
Optimale Steuerung Studieren geht über Probieren
 Studieren geht über Probieren Antrittsvorlesung 23. Oktober 2008 Danksagungen Hans Josef Pesch Fredi Tröltzsch Karl Kunisch Martin Bernauer Frank Schmidt Gerd Wachsmuth Wegweiser Einmal von A nach B bitte!
Studieren geht über Probieren Antrittsvorlesung 23. Oktober 2008 Danksagungen Hans Josef Pesch Fredi Tröltzsch Karl Kunisch Martin Bernauer Frank Schmidt Gerd Wachsmuth Wegweiser Einmal von A nach B bitte!
Parareal. Ein paralleler Lösungsalgorithmus für gewöhnliche Differentialgleichungen. Johannes Reinhardt. Parareal 1 Johannes Reinhardt
 Ein paralleler Lösungsalgorithmus für gewöhnliche Differentialgleichungen Johannes Reinhardt 1 Johannes Reinhardt Übersicht Grundlagen Gewöhnliche Differentialgleichungen Numerische Methoden Der Algorithmus
Ein paralleler Lösungsalgorithmus für gewöhnliche Differentialgleichungen Johannes Reinhardt 1 Johannes Reinhardt Übersicht Grundlagen Gewöhnliche Differentialgleichungen Numerische Methoden Der Algorithmus
Inhaltsverzeichnis. 1 Einleitung 1 Struktur und Einsatz von Optimierungsmethoden 2 Einsatz der Optimierung in der Steuerungs- und Regelungstechnik 6
 1 Einleitung 1 Struktur und Einsatz von Optimierungsmethoden 2 Einsatz der Optimierung in der Steuerungs- und Regelungstechnik 6 Teil I Statische Optimierung 2 Allgemeine Problemstellung der statischen
1 Einleitung 1 Struktur und Einsatz von Optimierungsmethoden 2 Einsatz der Optimierung in der Steuerungs- und Regelungstechnik 6 Teil I Statische Optimierung 2 Allgemeine Problemstellung der statischen
Newton-Verfahren zur optimalen Steuerung nichtlinearer elliptischer Randwertaufgaben
 Newton-Verfahren zur optimalen Steuerung nichtlinearer elliptischer Randwertaufgaben Patrick Knapp Berichtseminar zur Bachelorarbeit Universität Konstanz 14.12.2010 Einleitung Aufgabenstellung min J(y,
Newton-Verfahren zur optimalen Steuerung nichtlinearer elliptischer Randwertaufgaben Patrick Knapp Berichtseminar zur Bachelorarbeit Universität Konstanz 14.12.2010 Einleitung Aufgabenstellung min J(y,
Dynamische Programmierung
 Universität Bayreuth 29.06.08 1 2 3 4 5 Bezeichnungen und Formulierung Beispiel Lagerhaltungsproblem Beispiel Rucksackproblem Diskretes Dynamisches Optimierungsproblem Bezeichnungen und Formulierung Beispiel
Universität Bayreuth 29.06.08 1 2 3 4 5 Bezeichnungen und Formulierung Beispiel Lagerhaltungsproblem Beispiel Rucksackproblem Diskretes Dynamisches Optimierungsproblem Bezeichnungen und Formulierung Beispiel
Übungsaufgabe Numerische Lösung DGL
 Kallenrode, www.sotere.uos.de Übungsaufgabe Numerische Lösung DGL 1. Bestimmen Sie die Lösung der DGL ẋ = (t 2) 2 + t x mit x(0) = 1 im Bereich von t = 0 bis t = 5 mit Hilfe des Euler schen Streckenzugverfahrens,
Kallenrode, www.sotere.uos.de Übungsaufgabe Numerische Lösung DGL 1. Bestimmen Sie die Lösung der DGL ẋ = (t 2) 2 + t x mit x(0) = 1 im Bereich von t = 0 bis t = 5 mit Hilfe des Euler schen Streckenzugverfahrens,
Einige Erweiterungen der Variationsrechnung*
 Kapitel 5 Einige Erweiterungen der Variationsrechnung* 5.1 Einleitung In vielen Anwendungen treten Variationsprobleme auf, die in der einen oder anderen Weise vom der bislang behandelten Grundstruktur
Kapitel 5 Einige Erweiterungen der Variationsrechnung* 5.1 Einleitung In vielen Anwendungen treten Variationsprobleme auf, die in der einen oder anderen Weise vom der bislang behandelten Grundstruktur
1. Anfangswertprobleme 1. Ordnung
 1. Anfangswertprobleme 1. Ordnung 1.1 Grundlagen 1.2 Euler-Vorwärts-Verfahren 1.3 Runge-Kutta-Verfahren 1.4 Stabilität 1.5 Euler-Rückwärts-Verfahren 1.6 Differentialgleichungssysteme Prof. Dr. Wandinger
1. Anfangswertprobleme 1. Ordnung 1.1 Grundlagen 1.2 Euler-Vorwärts-Verfahren 1.3 Runge-Kutta-Verfahren 1.4 Stabilität 1.5 Euler-Rückwärts-Verfahren 1.6 Differentialgleichungssysteme Prof. Dr. Wandinger
Optimierung. Statische, dynamische, stochastische Verfahren für die Anwendung. Bearbeitet von Markos Papageorgiou, Marion Leibold, Martin Buss
 Optimierung Statische, dynamische, stochastische Verfahren für die Anwendung Bearbeitet von Markos Papageorgiou, Marion Leibold, Martin Buss erweitert, überarbeitet 2012. Taschenbuch. XVIII, 519 S. Paperback
Optimierung Statische, dynamische, stochastische Verfahren für die Anwendung Bearbeitet von Markos Papageorgiou, Marion Leibold, Martin Buss erweitert, überarbeitet 2012. Taschenbuch. XVIII, 519 S. Paperback
Optimale Steuerung partieller Differentialgleichungen Optimal Control of Partial Differential Equations
 Prof. Dr. H. J. Pesch Lehrstuhl für Ingenieurmathematik Universität Bayreuth Optimale teuerung partieller Differentialgleichungen Optimal Control of Partial Differential quations (Teil 1: W 2011/12) 13.
Prof. Dr. H. J. Pesch Lehrstuhl für Ingenieurmathematik Universität Bayreuth Optimale teuerung partieller Differentialgleichungen Optimal Control of Partial Differential quations (Teil 1: W 2011/12) 13.
Numerische Methoden 7. Übungsblatt
 Karlsruher Institut für Technologie (KIT) SS 01 Institut für Analysis Prof Dr Michael Plum Dipl-Mathtechn Rainer Mandel Numerische Methoden 7 Übungsblatt Aufgabe 17: Quadratur II Die Menge aller Polynome
Karlsruher Institut für Technologie (KIT) SS 01 Institut für Analysis Prof Dr Michael Plum Dipl-Mathtechn Rainer Mandel Numerische Methoden 7 Übungsblatt Aufgabe 17: Quadratur II Die Menge aller Polynome
Modellprädiktive Regelung nichtlinearer sampled-data Systeme
 Modellprädiktive Regelung nichtlinearer sampled-data Systeme L. Grüne 1 D. Nešić 2 J. Pannek 1 1 Mathematisches Institut Universität Bayreuth 2 EEE Department University of Melbourne 13. Februar 2006 Workshop
Modellprädiktive Regelung nichtlinearer sampled-data Systeme L. Grüne 1 D. Nešić 2 J. Pannek 1 1 Mathematisches Institut Universität Bayreuth 2 EEE Department University of Melbourne 13. Februar 2006 Workshop
1. Anfangswertprobleme 1. Ordnung
 1. Anfangswertprobleme 1. Ordnung 1.1 Grundlagen 1.2 Euler-Vorwärts-Verfahren 1.3 Runge-Kutta-Verfahren 1.4 Stabilität 1.5 Euler-Rückwärts-Verfahren 1.6 Differenzialgleichungssysteme 5.1-1 1.1 Grundlagen
1. Anfangswertprobleme 1. Ordnung 1.1 Grundlagen 1.2 Euler-Vorwärts-Verfahren 1.3 Runge-Kutta-Verfahren 1.4 Stabilität 1.5 Euler-Rückwärts-Verfahren 1.6 Differenzialgleichungssysteme 5.1-1 1.1 Grundlagen
Numerische Verfahren
 Numerische Verfahren Numerische Methoden von gewöhnlichen Differentialgleichungen (AWP) Prof. Dr.-Ing. K. Warendorf, Prof. Dr.-Ing. P. Wolfsteiner Hochschule für Angewandte Wissenschaften München (FH)
Numerische Verfahren Numerische Methoden von gewöhnlichen Differentialgleichungen (AWP) Prof. Dr.-Ing. K. Warendorf, Prof. Dr.-Ing. P. Wolfsteiner Hochschule für Angewandte Wissenschaften München (FH)
Parameterschätzung an einem Anfangswertproblem aus der Physiologie
 Parameterschätzung an einem Anfangswertproblem aus der Physiologie Erkki Silde und Horatio Cuesdeanu 13. Juli 2010 Erkki Silde und Horatio Cuesdeanu () Parameterschätzung 13. Juli 2010 1 / 7 Gegeben sei
Parameterschätzung an einem Anfangswertproblem aus der Physiologie Erkki Silde und Horatio Cuesdeanu 13. Juli 2010 Erkki Silde und Horatio Cuesdeanu () Parameterschätzung 13. Juli 2010 1 / 7 Gegeben sei
2. Anfangswertprobleme 2. Ordnung
 2. Anfangswertprobleme 2. Ordnung 2.1 Grundlagen 2.2 Mathematisches Pendel 2.3 Selbstzentrierung Prof. Dr. Wandinger 7. Numerische Methoden Dynamik 2 7.2-1 2.1 Grundlagen Für ein Anfangswertproblem 2.
2. Anfangswertprobleme 2. Ordnung 2.1 Grundlagen 2.2 Mathematisches Pendel 2.3 Selbstzentrierung Prof. Dr. Wandinger 7. Numerische Methoden Dynamik 2 7.2-1 2.1 Grundlagen Für ein Anfangswertproblem 2.
Zeitoptimale und singuläre Steuerungen in einem mechatronischen System mit Coulomb-Reibung
 Zeitoptimale und singuläre Steuerungen in einem mechatronischen System mit Coulomb-Reibung Diplomarbeit Andreas Ott 27. Juni 27 Diplomarbeitsbetreuer: Prof. Dr. Helmut Maurer Institut für Numerische und
Zeitoptimale und singuläre Steuerungen in einem mechatronischen System mit Coulomb-Reibung Diplomarbeit Andreas Ott 27. Juni 27 Diplomarbeitsbetreuer: Prof. Dr. Helmut Maurer Institut für Numerische und
Differenzialgleichungen
 Differenzialgleichungen Fakultät Grundlagen April 2011 Fakultät Grundlagen Differenzialgleichungen Übersicht Grundsätzliches 1 Grundsätzliches Problemstellung Richtungsfeld Beispiel 2 Eulerverfahren Heunverfahren
Differenzialgleichungen Fakultät Grundlagen April 2011 Fakultät Grundlagen Differenzialgleichungen Übersicht Grundsätzliches 1 Grundsätzliches Problemstellung Richtungsfeld Beispiel 2 Eulerverfahren Heunverfahren
Numerische Behandlung linearer und semilinearer partieller differentiell-algebraischer Systeme mit Runge-Kutta-Methoden.
 Numerische Behandlung linearer und semilinearer partieller differentiell-algebraischer Systeme mit Runge-Kutta-Methoden Dissertation zur Erlangung des akademischen Grades doctor rerum naturalium (Dr. rer.
Numerische Behandlung linearer und semilinearer partieller differentiell-algebraischer Systeme mit Runge-Kutta-Methoden Dissertation zur Erlangung des akademischen Grades doctor rerum naturalium (Dr. rer.
SYSTEMANALYSE 2 Kapitel 10: Einführung in die dynamische Optimierung gekoppelter Systeme
 Universität Koblenz-Landau Fachbereich 7: Natur-und Umweltwissenschaften Institut für Umweltwissenschaften Dr. Horst Niemes(Lehrbeauftragter) SYSTEMANALYSE 2 Kapitel 10: Einführung in die dynamische Optimierung
Universität Koblenz-Landau Fachbereich 7: Natur-und Umweltwissenschaften Institut für Umweltwissenschaften Dr. Horst Niemes(Lehrbeauftragter) SYSTEMANALYSE 2 Kapitel 10: Einführung in die dynamische Optimierung
Burgersgleichung in 1D und 2D
 Burgersgleichung in 1D und 2D Johannes Lülff Universität Münster 5.12.2008 Inhaltsverzeichnis 1 Einführung 2 Numerik 3 Phänomenologie 4 Analytische Ergebnisse 5 Zusammenfassung Herkunft der Burgersgleichung
Burgersgleichung in 1D und 2D Johannes Lülff Universität Münster 5.12.2008 Inhaltsverzeichnis 1 Einführung 2 Numerik 3 Phänomenologie 4 Analytische Ergebnisse 5 Zusammenfassung Herkunft der Burgersgleichung
Motivation. Differentialgleichungen der Kontinuumsmechanik. Inhalt. Modulbeschreibung
 Motivation Differentialgleichungen der Kontinuumsmechanik Kurt Frischmuth Institut für Mathematik der Universität Rostock Die Vorlesung wird auf Wunsch der Fakultät für Maschinenbau angeboten. Sie soll
Motivation Differentialgleichungen der Kontinuumsmechanik Kurt Frischmuth Institut für Mathematik der Universität Rostock Die Vorlesung wird auf Wunsch der Fakultät für Maschinenbau angeboten. Sie soll
Übersicht. Prof. Dr. Frank Beckenbach VWL I (Mikroökonomik) Teil I: Grundlagen
 Teil I: Grundlagen") Übersicht Handlungsschema Modelle des mikroökonomischen Handelns Vertiefung (I): Welche Modellvarianten gibt es in der Mikroökonomik? Mathematische Modelle in der Mikroökonomik Vertiefung (II): Simulationsmodelle
Übersicht Handlungsschema Modelle des mikroökonomischen Handelns Vertiefung (I): Welche Modellvarianten gibt es in der Mikroökonomik? Mathematische Modelle in der Mikroökonomik Vertiefung (II): Simulationsmodelle
Diskretisierungskonzepte für Optimalsteuerungsprobleme mit partiellen Differentialgleichungen
 Diskretisierungskonzepte für Optimalsteuerungsprobleme mit partiellen Differentialgleichungen Tobias Seitz 18. Juli 2012 1 Das Modellproblem Wir betrachten das bekannte Modellproblem für die optimale Steuerung
Diskretisierungskonzepte für Optimalsteuerungsprobleme mit partiellen Differentialgleichungen Tobias Seitz 18. Juli 2012 1 Das Modellproblem Wir betrachten das bekannte Modellproblem für die optimale Steuerung
EINLEITUNG MAGNETSCHWEBETECHNIK
 EINLEITUNG Magnetschwebebahnen sind Transportmittel der Zukunft. Hohe Beschleunigungen und Geschwindigkeiten bedeuten eine Verbesserung der Mobilität im Transportwesen. Die Probleme dieser noch jungen
EINLEITUNG Magnetschwebebahnen sind Transportmittel der Zukunft. Hohe Beschleunigungen und Geschwindigkeiten bedeuten eine Verbesserung der Mobilität im Transportwesen. Die Probleme dieser noch jungen
d x 2 = 1 y ' x 2 d x 2
 2. Variationsrechnung 2.1. Variation ohne Nebenbedingungen Eine Funktion y = y(x) ordnet jedem x-wert eine Zahl (den y-wert) zu. In der Variationsrechnung betrachtet man Funktionale, die jeder Funktion
2. Variationsrechnung 2.1. Variation ohne Nebenbedingungen Eine Funktion y = y(x) ordnet jedem x-wert eine Zahl (den y-wert) zu. In der Variationsrechnung betrachtet man Funktionale, die jeder Funktion
Einführung in die Volkswirtschaftslehre
 Einführung in die Volkswirtschaftslehre Übung 1: Mathematische Analyseinstrumente Dipl.-Volksw. J.-E.Wesselhöft/ Dipl.-Volksw. J.Freese Bachelor Modul Volkswirtschaftliche Analyse (WS-14-V-03) HT 2009
Einführung in die Volkswirtschaftslehre Übung 1: Mathematische Analyseinstrumente Dipl.-Volksw. J.-E.Wesselhöft/ Dipl.-Volksw. J.Freese Bachelor Modul Volkswirtschaftliche Analyse (WS-14-V-03) HT 2009
Ansätze zur Lösung von NMPC Problemen
 Ansätze zur Lösung von NMPC Problemen Jürgen Pannek 12. Juni 2006 Seminar Modellprädiktive Regelung Gliederung 1 Problemstellung Lösungsansätze 2 Direkte Verfahren Diskretisierung Konvergenzanalyse 3 Nichtlineare
Ansätze zur Lösung von NMPC Problemen Jürgen Pannek 12. Juni 2006 Seminar Modellprädiktive Regelung Gliederung 1 Problemstellung Lösungsansätze 2 Direkte Verfahren Diskretisierung Konvergenzanalyse 3 Nichtlineare
Computersimulationen in der Astronomie
 Computersimulationen in der Astronomie Fabian Heimann Universität Göttingen, Fabian.Heimann@stud.uni-goettingen.de Astronomisches Sommerlager 2013 Inhaltsverzeichnis 1 Differentialgleichungen 3 1.1 Beispiele.....................................
Computersimulationen in der Astronomie Fabian Heimann Universität Göttingen, Fabian.Heimann@stud.uni-goettingen.de Astronomisches Sommerlager 2013 Inhaltsverzeichnis 1 Differentialgleichungen 3 1.1 Beispiele.....................................
Lagrange-Formalismus
 KAPITEL II Lagrange-Formalismus Die im letzten Kapitel dargelegte Formulierung der Mechanik nach Newton ist zwar sehr intuitiv: man zählt alle auf das zu studierende System wirkenden Kräfte auf, schreibt
KAPITEL II Lagrange-Formalismus Die im letzten Kapitel dargelegte Formulierung der Mechanik nach Newton ist zwar sehr intuitiv: man zählt alle auf das zu studierende System wirkenden Kräfte auf, schreibt
Optimierungsmethoden in der Bildverarbeitung
 Optimierungsmethoden in der Bildverarbeitung Bildentrauschung und Kantenerkennung mit L p - und Gradientenbeschränkung bei Graustufenbildern Westfälische Wilhelms-Universität Münster Institut für Numerische
Optimierungsmethoden in der Bildverarbeitung Bildentrauschung und Kantenerkennung mit L p - und Gradientenbeschränkung bei Graustufenbildern Westfälische Wilhelms-Universität Münster Institut für Numerische
Beispiel: Rollender Reifen mit
 Beispiel: Rollender Reifen mit Kinetische Energie: Trägheitsmoment Potenzielle Energie: Zwangsbedingung: konstant nicht-gleitendes Rollen, holonome ZB Erweiterte Lagrange-Fkt.: t-abhängig: Interpretation:
Beispiel: Rollender Reifen mit Kinetische Energie: Trägheitsmoment Potenzielle Energie: Zwangsbedingung: konstant nicht-gleitendes Rollen, holonome ZB Erweiterte Lagrange-Fkt.: t-abhängig: Interpretation:
1 Einleitung. f (x) =min! bei x G ={x : g i (x) 0 i I}, (1.1) wobei I. I ={i : i = 1,, m}
 =min! bei x G ={x : g i (x) 0 i I}, (1.1) wobei I. I ={i : i = 1,, m}") 1 1 Einleitung 1.1 Das lineare und das nichtlineare Optimierungsproblem Im vorliegenden Buch werden Optimierungsaufgaben betrachtet, die dadurch charakterisiert sind, dass eine lineare oder nichtlineare
1 1 Einleitung 1.1 Das lineare und das nichtlineare Optimierungsproblem Im vorliegenden Buch werden Optimierungsaufgaben betrachtet, die dadurch charakterisiert sind, dass eine lineare oder nichtlineare
Numerik I. Gewöhnliche Differentialgleichungen. Prof.Dr.G.Wittum. Teil I:
 Numerik I Prof.Dr.G.Wittum Teil I: Gewönlice Differentialgleicungen Sommersemester 2005 INHALTSVERZEICHNIS 1 Inaltsverzeicnis 1 Numerik gewönlicer Differentialgleicungen 2 1.1 Einleitung....................................
Numerik I Prof.Dr.G.Wittum Teil I: Gewönlice Differentialgleicungen Sommersemester 2005 INHALTSVERZEICHNIS 1 Inaltsverzeicnis 1 Numerik gewönlicer Differentialgleicungen 2 1.1 Einleitung....................................
Übungen zur Theoretischen Physik 2 Lösungen zu Blatt 13
 Prof. C. Greiner, Dr. H. van Hees Sommersemester 014 Übungen zur Theoretischen Physik Lösungen zu Blatt 13 Aufgabe 51: Massenpunkt auf Kugel (a) Als generalisierte Koordinaten bieten sich Standard-Kugelkoordinaten
Prof. C. Greiner, Dr. H. van Hees Sommersemester 014 Übungen zur Theoretischen Physik Lösungen zu Blatt 13 Aufgabe 51: Massenpunkt auf Kugel (a) Als generalisierte Koordinaten bieten sich Standard-Kugelkoordinaten
Lösungen zum Übungsblatt 1
 Fakultät für Luft- und Raumfahrttechnik Institut für Mathematik und Rechneranwendung Variationsrechnung ME), Prof Dr J Gwinner Übung: K Dvorsky 3 pril Lösungen zum Übungsblatt Das rachistochronenproblem
Fakultät für Luft- und Raumfahrttechnik Institut für Mathematik und Rechneranwendung Variationsrechnung ME), Prof Dr J Gwinner Übung: K Dvorsky 3 pril Lösungen zum Übungsblatt Das rachistochronenproblem
h n = (t t 0 )/n Bevor wir diesen Satz beweisen, geben wir noch einen Hilfssatz an, der eine wichtige Abschätzung liefert.
/n Bevor wir diesen Satz beweisen, geben wir noch einen Hilfssatz an, der eine wichtige Abschätzung liefert.") Kapitel 4 Berechnung von Lösungen 41 Die Euler sche Polygonzugmethode Die Grundlage dieser Methode ist die einfache Beobachtung, dass f(u, t) in der Nähe eines Punktes als nahezu konstant angesehen werden
Kapitel 4 Berechnung von Lösungen 41 Die Euler sche Polygonzugmethode Die Grundlage dieser Methode ist die einfache Beobachtung, dass f(u, t) in der Nähe eines Punktes als nahezu konstant angesehen werden
2. Anfangswertprobleme 2. Ordnung
 Zu einem Anfangswertproblem 2. Ordnung gehören folgende Daten: Eine Differenzialgleichung 2. Ordnung: ẍ t f [ x t, ẋ t,t ] Die Anfangsbedingungen: x 0 x 0, ẋ 0 ẋ 0 Das zu untersuchende Zeitintervall: t
Zu einem Anfangswertproblem 2. Ordnung gehören folgende Daten: Eine Differenzialgleichung 2. Ordnung: ẍ t f [ x t, ẋ t,t ] Die Anfangsbedingungen: x 0 x 0, ẋ 0 ẋ 0 Das zu untersuchende Zeitintervall: t
Konvexe Optimierung I Sommersemester Kapitel 0
 Sommersemester 2013 Kapitel 0 Jun.-Prof. Dr. Thorsten Raasch Johannes Gutenberg-Universität Mainz Institut für Mathematik 15. April 2013 Konvexe Optimierung Was ist das? Was bedeutet Optimierung? Was bedeutet
Sommersemester 2013 Kapitel 0 Jun.-Prof. Dr. Thorsten Raasch Johannes Gutenberg-Universität Mainz Institut für Mathematik 15. April 2013 Konvexe Optimierung Was ist das? Was bedeutet Optimierung? Was bedeutet
Einführung und Motivation
 KAPITEL 1 Einführung und Motivation Inhalt 1 Beispiele 6 1.1 Beispiele mit linearen PDEs 6 1. Beispiele mit semilinearen PDEs 9 1.3 Aufgabenstellung und Ziele der Vorlesung 11 Grundkonzepte im endlich-dimensionalen
KAPITEL 1 Einführung und Motivation Inhalt 1 Beispiele 6 1.1 Beispiele mit linearen PDEs 6 1. Beispiele mit semilinearen PDEs 9 1.3 Aufgabenstellung und Ziele der Vorlesung 11 Grundkonzepte im endlich-dimensionalen
D-MATH Numerische Methoden FS 2018 Dr. Vasile Gradinaru Kjetil Olsen Lye. Serie 6
 D-MATH Numerische Methoden FS 08 Dr. Vasile Gradinaru Kjetil Olsen Lye Serie 6 Abgabedatum: Di. 08.0 / Mi. 09.0, in den Übungsgruppen, oder im HG J 68. Koordinatoren: Kjetil Olsen Lye, HG G 6. kjetil.lye@sam.math.ethz.ch
D-MATH Numerische Methoden FS 08 Dr. Vasile Gradinaru Kjetil Olsen Lye Serie 6 Abgabedatum: Di. 08.0 / Mi. 09.0, in den Übungsgruppen, oder im HG J 68. Koordinatoren: Kjetil Olsen Lye, HG G 6. kjetil.lye@sam.math.ethz.ch
1/15. Das n-körper Problem. Numerische Mathematik 1 WS 2011/12
 1/15 Das n-körper Problem Numerische Mathematik 1 WS 2011/12 Ziel 2/15 Beschreibung der Bewegung von n N Punktmassen im luftleeren Raum (hier R 2 ), wobei jede Masse auf jede andere Masse eine gewisse
1/15 Das n-körper Problem Numerische Mathematik 1 WS 2011/12 Ziel 2/15 Beschreibung der Bewegung von n N Punktmassen im luftleeren Raum (hier R 2 ), wobei jede Masse auf jede andere Masse eine gewisse
(Lineare) stochastische Optimierung
 stochastische Optimierung") (Lineare) stochastische Optimierung Bsp: Aus zwei Sorten Rohöl wird Benzin und Heizöl erzeugt. Die Produktivität sowie der Mindestbedarf (pro Woche) und die Kosten sind in folgender Tabelle angegeben:
(Lineare) stochastische Optimierung Bsp: Aus zwei Sorten Rohöl wird Benzin und Heizöl erzeugt. Die Produktivität sowie der Mindestbedarf (pro Woche) und die Kosten sind in folgender Tabelle angegeben:
Newton- und und Quasi-Newton-Methoden in der Optimierung. János Mayer
 Newton- und und Quasi-Newton-Methoden in der Optimierung János Mayer 1 GLIEDERUNG Newton-Methode für nichtlineare Gleichungen nichtlineare Gleichungssysteme freie Minimierung. Quasi-Newton-Methoden für
Newton- und und Quasi-Newton-Methoden in der Optimierung János Mayer 1 GLIEDERUNG Newton-Methode für nichtlineare Gleichungen nichtlineare Gleichungssysteme freie Minimierung. Quasi-Newton-Methoden für
1/21. Der Wurf mit Wind. Numerische Mathematik 1 WS 2011/12
 1/21 Der Wurf mit Wind Numerische Mathematik 1 WS 2011/12 Problemstellung Die Funktion q : R R 2 beschreibe mit q(t) die Position eines Projektils zum Zeitpunkt t R. 100 Zielzeitpunkt = 12.937; Fehler
1/21 Der Wurf mit Wind Numerische Mathematik 1 WS 2011/12 Problemstellung Die Funktion q : R R 2 beschreibe mit q(t) die Position eines Projektils zum Zeitpunkt t R. 100 Zielzeitpunkt = 12.937; Fehler
Grundlagen der Optimierung. Übung 6
 Technische Universität Chemnitz Chemnitz, 2. November 24 Prof. Dr. R. Herzog, J. Blechschmidt, A. Schäfer Abgabe am 28. November 24 Grundlagen der Optimierung Übung 6 Aufgabe 2: Verschiedene Verfahren
Technische Universität Chemnitz Chemnitz, 2. November 24 Prof. Dr. R. Herzog, J. Blechschmidt, A. Schäfer Abgabe am 28. November 24 Grundlagen der Optimierung Übung 6 Aufgabe 2: Verschiedene Verfahren
Klassische Theoretische Physik: Mechanik
 Klassische Theoretische Physik: Mechanik Patrick Simon Argelander-Institut für Astronomie Auf dem Hügel 71 psimon@astro.uni-bonn.de 21. November 2013 1 Hamiltonsches Prinzip Die Euler-Lagrange-Gleichungen
Klassische Theoretische Physik: Mechanik Patrick Simon Argelander-Institut für Astronomie Auf dem Hügel 71 psimon@astro.uni-bonn.de 21. November 2013 1 Hamiltonsches Prinzip Die Euler-Lagrange-Gleichungen
KLAUSUR zur Numerik I mit Lösungen. Aufgabe 1: (10 Punkte) [ wahr falsch ] 1. Die maximale Ordnung einer s-stufigen Quadraturformel ist s 2.
![KLAUSUR zur Numerik I mit Lösungen. Aufgabe 1: (10 Punkte) [ wahr falsch ] 1. Die maximale Ordnung einer s-stufigen Quadraturformel ist s 2.](/thumbs/71/65292107.jpg "KLAUSUR zur Numerik I mit Lösungen. Aufgabe 1: (10 Punkte) [ wahr falsch ] 1. Die maximale Ordnung einer s-stufigen Quadraturformel ist s 2.") MATHEMATISCHES INSTITUT PROF. DR. ACHIM SCHÄDLE 9.8.7 KLAUSUR zur Numerik I mit Lösungen Aufgabe : ( Punkte) [ wahr falsch ]. Die maximale Ordnung einer s-stufigen Quadraturformel ist s. [ ]. Der Clenshaw
MATHEMATISCHES INSTITUT PROF. DR. ACHIM SCHÄDLE 9.8.7 KLAUSUR zur Numerik I mit Lösungen Aufgabe : ( Punkte) [ wahr falsch ]. Die maximale Ordnung einer s-stufigen Quadraturformel ist s. [ ]. Der Clenshaw
Differentialgleichungen
 Differentialgleichungen Ronald Balestra CH - 8046 Zürich www.ronaldbalestra.ch Name: Vorname: 5. März 2014 Inhaltsverzeichnis 1 Einleitung 1 2 Anwendungen der Differentialgleichungen 2 2.1 Radioaktiver
Differentialgleichungen Ronald Balestra CH - 8046 Zürich www.ronaldbalestra.ch Name: Vorname: 5. März 2014 Inhaltsverzeichnis 1 Einleitung 1 2 Anwendungen der Differentialgleichungen 2 2.1 Radioaktiver
6. Allgemeine Variationen
 H.J. Oberle Variationsrechnung u. Optimale Steuerung SoSe 2008 6. Allgemeine Variationen Neben den bisher behandelten Aufgaben treten allgemeinere Variationsprobleme auf, bei denen Vergleichskurven mit
H.J. Oberle Variationsrechnung u. Optimale Steuerung SoSe 2008 6. Allgemeine Variationen Neben den bisher behandelten Aufgaben treten allgemeinere Variationsprobleme auf, bei denen Vergleichskurven mit
Inhaltsverzeichnis. Vorlesung und Übung Optimierung (WS 2016/2017) Steinböck, Kugi, Institut für Automatisierungs- und Regelungstechnik, TU Wien
 Steinböck, Kugi, Institut für Automatisierungs- und Regelungstechnik, TU Wien") Inhaltsverzeichnis 4 Dynamische Optimierung 94 4.1 Grundlagen der Variationsrechnung...................... 94 4.1.1 Problemformulierung.......................... 94 4.1.2 Optimalitätsbedingungen.......................
Inhaltsverzeichnis 4 Dynamische Optimierung 94 4.1 Grundlagen der Variationsrechnung...................... 94 4.1.1 Problemformulierung.......................... 94 4.1.2 Optimalitätsbedingungen.......................
- 1 - zum Extremum macht, wenn y(x) eine bestimmte, genau charakterisierte Funktionenklasse ( n
 eine bestimmte, genau charakterisierte Funktionenklasse ( n") - 1 - Variationsrechnung Die Variationsrechnung spielt in der Physik eine entscheidende Rolle. So kann man die Grundgleichungen der Newtonschen Mechanik aus einem Lagrangeschen Variationsprinzip herleiten.
- 1 - Variationsrechnung Die Variationsrechnung spielt in der Physik eine entscheidende Rolle. So kann man die Grundgleichungen der Newtonschen Mechanik aus einem Lagrangeschen Variationsprinzip herleiten.
*** 2.2. Variation mit Nebenbedingung (Ergänzung: wird nicht geprüft)
") *** 2.2. Variation mit Nebenbedingung (Ergänzung: wird nicht geprüft) In manchen Problemen sind nicht alle möglichen Funktionen als Lösung erlaubt, sondern nur Funktionen, die zusätzliche Bedingungen erfüllen.
*** 2.2. Variation mit Nebenbedingung (Ergänzung: wird nicht geprüft) In manchen Problemen sind nicht alle möglichen Funktionen als Lösung erlaubt, sondern nur Funktionen, die zusätzliche Bedingungen erfüllen.
Variation mit Nebenbedingungen
 Variation mit Nebenbedingungen Lagrange-Multiplikatoren Welcher Punkt minimiert unter der Nebenbedingung (NB) absolutes Minimum Ohne NB wäre Antwort: 2 Gl. für 2 Unbekannte Aber: NB verknüpft x,y unabhängige
Variation mit Nebenbedingungen Lagrange-Multiplikatoren Welcher Punkt minimiert unter der Nebenbedingung (NB) absolutes Minimum Ohne NB wäre Antwort: 2 Gl. für 2 Unbekannte Aber: NB verknüpft x,y unabhängige
2.3 Klassische Variationsprobleme
 58 Kapitel. Variationsrechnung.3 Klassische Variationsprobleme Wir werden nun zwei klassische Variationsprobleme behandeln, die bei der Entwicklung der bisher vorgestellten Methoden eine wichtige Rolle
58 Kapitel. Variationsrechnung.3 Klassische Variationsprobleme Wir werden nun zwei klassische Variationsprobleme behandeln, die bei der Entwicklung der bisher vorgestellten Methoden eine wichtige Rolle
Hohere Mathematik. fur Ingenieure, Physiker und Mathematiker von Dr. Dr. h.c. Norbert Herrmann Leibniz Universitat Hannover 2., uberarbeitete Auflage
 Hohere Mathematik fur Ingenieure, Physiker und Mathematiker von Dr. Dr. h.c. Norbert Herrmann Leibniz Universitat Hannover 2., uberarbeitete Auflage Oldenbourg Verlag MunchenWien Inhaltsverzeichnis Einleitung
Hohere Mathematik fur Ingenieure, Physiker und Mathematiker von Dr. Dr. h.c. Norbert Herrmann Leibniz Universitat Hannover 2., uberarbeitete Auflage Oldenbourg Verlag MunchenWien Inhaltsverzeichnis Einleitung
TEIL 1 (ohne Rechner)
") Name: Seite: 1 Fachhochschule Nordwestschweiz (FHNW) Hochschule für Technik Lösungen MSP Modellieren dynamischer Systeme Dozent: R. Burkhardt Büro: 4.613 Klasse: Systemtechnik Semester: Datum: FS 008 Hilfsmittel:
Name: Seite: 1 Fachhochschule Nordwestschweiz (FHNW) Hochschule für Technik Lösungen MSP Modellieren dynamischer Systeme Dozent: R. Burkhardt Büro: 4.613 Klasse: Systemtechnik Semester: Datum: FS 008 Hilfsmittel:
Theoretische Physik 2 (Theoretische Mechanik)
") Theoretische Physik 2 (Theoretische Mechanik Prof. Dr. Th. Feldmann 12. November 2013 Kurzzusammenfassung Vorlesung 8 vom 12.11.2013 2.4 Das Hamiltonsche Prinzip ( Prinzip der kleinsten Wirkung Wir zeigen,
Theoretische Physik 2 (Theoretische Mechanik Prof. Dr. Th. Feldmann 12. November 2013 Kurzzusammenfassung Vorlesung 8 vom 12.11.2013 2.4 Das Hamiltonsche Prinzip ( Prinzip der kleinsten Wirkung Wir zeigen,
Ferienkurs Theoretische Mechanik. Lagrangeformalismus
 Ferienkurs Theoretische Mechanik Lagrangeformalismus Sebastian Wild Mittwoch, 14.09.2011 Inhaltsverzeichnis 1 Zwangskräfte und Lagrangegleichungen 1. Art 2 1.1 Motivation, Definition von Zwangsbedingungen..........
Ferienkurs Theoretische Mechanik Lagrangeformalismus Sebastian Wild Mittwoch, 14.09.2011 Inhaltsverzeichnis 1 Zwangskräfte und Lagrangegleichungen 1. Art 2 1.1 Motivation, Definition von Zwangsbedingungen..........
Spezialisierte adaptive Algorithmen für die Modellprädiktive Regelung von PDEs
 Spezialisierte adaptive Algorithmen für die Modellprädiktive Regelung von PDEs Lehrstuhl für Angewandte Mathematik Mathematisches Institut Universität Bayreuth 28.02.2018 12. Elgersburg Workshop (26.02.
Spezialisierte adaptive Algorithmen für die Modellprädiktive Regelung von PDEs Lehrstuhl für Angewandte Mathematik Mathematisches Institut Universität Bayreuth 28.02.2018 12. Elgersburg Workshop (26.02.
Simulationstechnik V
 Simulationstechnik V Vorlesung/Praktikum an der RWTH Aachen Numerische Simulation von Strömungsvorgängen B. Binninger Institut für Technische Verbrennung Templergraben 64 2. Teil 2-1 1) Welche Garantie
Simulationstechnik V Vorlesung/Praktikum an der RWTH Aachen Numerische Simulation von Strömungsvorgängen B. Binninger Institut für Technische Verbrennung Templergraben 64 2. Teil 2-1 1) Welche Garantie
Bildsegmentierung mit Snakes und aktiven Konturen
 Bildsegmentierung mit Snakes und aktiven Konturen 5. Dezember 2005 Vortrag zum Seminar Bildsegmentierung und Computer Vision Übersicht 1 2 Definition der Snake Innere Energie S(c) 3 Statisches Optimierungsproblem
Bildsegmentierung mit Snakes und aktiven Konturen 5. Dezember 2005 Vortrag zum Seminar Bildsegmentierung und Computer Vision Übersicht 1 2 Definition der Snake Innere Energie S(c) 3 Statisches Optimierungsproblem
Studienschwerpunkt Numerische Mathematik
 Studienschwerpunkt Numerische Mathematik Ralf Hiptmair Seminar for Applied Mathematics, ETH Zürich Wahlfachvorstellung SS 25 R.Hiptmair (SAM, ETH Zürich) Numerische Mathematik SS 25 / 3 Vorlesungsangebot
Studienschwerpunkt Numerische Mathematik Ralf Hiptmair Seminar for Applied Mathematics, ETH Zürich Wahlfachvorstellung SS 25 R.Hiptmair (SAM, ETH Zürich) Numerische Mathematik SS 25 / 3 Vorlesungsangebot
Numerische Lösung von Differentialgleichungen
 Numerische Lösung von Differentialgleichungen Matheseminar 2017 Daniel Jodlbauer 9. Juni 2017 Überblick Motivation Voraussetzungen / Wiederholung Differentialgleichungen Lösungsverfahren Differentialgleichungen?
Numerische Lösung von Differentialgleichungen Matheseminar 2017 Daniel Jodlbauer 9. Juni 2017 Überblick Motivation Voraussetzungen / Wiederholung Differentialgleichungen Lösungsverfahren Differentialgleichungen?
Simulationstechnik V
 Simulationstechnik V Vorlesung/Praktikum an der RWTH Aachen Numerische Simulation von Strömungsvorgängen B. Binninger Institut für Technische Verbrennung Templergraben 64 2. Teil 2-1 1) Welche Garantie
Simulationstechnik V Vorlesung/Praktikum an der RWTH Aachen Numerische Simulation von Strömungsvorgängen B. Binninger Institut für Technische Verbrennung Templergraben 64 2. Teil 2-1 1) Welche Garantie
Diskretisierungskonzepte für Optimalsteuerungsprobleme mit partiellen Differentialgleichungen
 Diskretisierungskonzepte für Optimalsteuerungsprobleme mit partiellen Differentialgleichungen Tobias Seitz 18. Juli 2012 Das Modellproblem Das Modellproblem min J(y,u) =: 1 2 y (y,u) Y U z 2 L 2 (Ω) +
Diskretisierungskonzepte für Optimalsteuerungsprobleme mit partiellen Differentialgleichungen Tobias Seitz 18. Juli 2012 Das Modellproblem Das Modellproblem min J(y,u) =: 1 2 y (y,u) Y U z 2 L 2 (Ω) +
Simulationstechnik V
 Simulationstechnik V Vorlesung/Praktikum an der RWTH Aachen Numerische Simulation von Strömungsvorgängen B. Binninger Institut für Technische Verbrennung Templergraben 64 2. Teil 2-1 1) Welche Garantie
Simulationstechnik V Vorlesung/Praktikum an der RWTH Aachen Numerische Simulation von Strömungsvorgängen B. Binninger Institut für Technische Verbrennung Templergraben 64 2. Teil 2-1 1) Welche Garantie
Vorlesung Variationsrechnung und optimale Steuerung. 6. Foliensatz, Version vom Michael Karow
 Vorlesung Variationsrechnung und optimale Steuerung 6. Foliensatz, Version vom 9.7.214 Michael Karow Thema der nächsten Vorlesungen: Zeitoptimale -Steuerung für lineare zeitinvariante DGL bei beschränkter
Vorlesung Variationsrechnung und optimale Steuerung 6. Foliensatz, Version vom 9.7.214 Michael Karow Thema der nächsten Vorlesungen: Zeitoptimale -Steuerung für lineare zeitinvariante DGL bei beschränkter
Optimaler Transport. Marzena Franek. Skiseminar Februar Institut für Numerische und Angewandte Mathematik
 Institut für Numerische und Angewandte Mathematik Skiseminar Februar 2009 1 Das Problem von Monge 1 Das Problem von Monge 2 1 Das Problem von Monge 2 3 1 Das Problem von Monge 2 3 4 1 Das Problem von Monge
Institut für Numerische und Angewandte Mathematik Skiseminar Februar 2009 1 Das Problem von Monge 1 Das Problem von Monge 2 1 Das Problem von Monge 2 3 1 Das Problem von Monge 2 3 4 1 Das Problem von Monge
Hochschule Düsseldorf University of Applied Sciences. 22. Oktober 2015 HSD. Physik. Bewegung in einer Dimension
 Physik Bewegung in einer Dimension Überblick für heute 2. Semester Mathe wird das richtig gemacht! Differenzieren (Ableitung) Integration Strecke Geschwindigkeit Beschleunigung Integrieren und differenzieren
Physik Bewegung in einer Dimension Überblick für heute 2. Semester Mathe wird das richtig gemacht! Differenzieren (Ableitung) Integration Strecke Geschwindigkeit Beschleunigung Integrieren und differenzieren
Eichtransformationen. i) Satz: HP impliziert Kovarianz der Lagrange-Gl. 2. Art unter Koord.-Transf.
 Satz: HP impliziert Kovarianz der Lagrange-Gl. 2. Art unter Koord.-Transf.") Eichtransformationen i) Satz: HP impliziert Kovarianz der Lagrange-Gl. 2. Art unter Koord.-Transf. Beweis: Wirkung S ist unabhängig von Parametrisierung für gegebene physikalische Bahnkurve; folglich haben
Eichtransformationen i) Satz: HP impliziert Kovarianz der Lagrange-Gl. 2. Art unter Koord.-Transf. Beweis: Wirkung S ist unabhängig von Parametrisierung für gegebene physikalische Bahnkurve; folglich haben
- Numerik in der Physik - Simulationen, DGL und Co. Max Menzel
 - Numerik in der Physik - Simulationen, DGL und Co. Max Menzel 4.1.2011 1 Übersicht Differenzialgleichungen? Was ist das? Wo gibt es das? Lösen von Differenzialgleichungen Analytisch Numerisch Anwendungen
- Numerik in der Physik - Simulationen, DGL und Co. Max Menzel 4.1.2011 1 Übersicht Differenzialgleichungen? Was ist das? Wo gibt es das? Lösen von Differenzialgleichungen Analytisch Numerisch Anwendungen
In den letzten zwei Jahrzehnten. Referenzbahnen für Roboter. A K A D E M I E F o r s c h u n g
 m a t h e m a t i k Referenzbahnen für Roboter A u s g e f e i l t e m a t h e m a t i s c h e V e r f a h r e n e r m ö g l i c h e n d i e h o c h g e n a u e B e r e c h n u n g o p t i m a l e r B
m a t h e m a t i k Referenzbahnen für Roboter A u s g e f e i l t e m a t h e m a t i s c h e V e r f a h r e n e r m ö g l i c h e n d i e h o c h g e n a u e B e r e c h n u n g o p t i m a l e r B
Dynamische Optimierung
 Dynamische Optimierung Mike Hüftle 28. Juli 2006 Inhaltsverzeichnis 1 Einleitung 2 1.1.................................... 2 2 Dynamisches Optimierungmodell 3 2.1 Grundmodell der dynamischen Optimierung............
Dynamische Optimierung Mike Hüftle 28. Juli 2006 Inhaltsverzeichnis 1 Einleitung 2 1.1.................................... 2 2 Dynamisches Optimierungmodell 3 2.1 Grundmodell der dynamischen Optimierung............
Dynamik und Regelung Mechanischer Systeme
 Dynamik und Regelung Mechanischer Systeme Von Priv.-Doz. Dr.-Ing. habil. Hartmut Bremer Technische Universität München Mit 101 Bildern B. G.Teubner Stuttgart 1988 Inhalt s Verzeichnis Vorbemerkung: Der
Dynamik und Regelung Mechanischer Systeme Von Priv.-Doz. Dr.-Ing. habil. Hartmut Bremer Technische Universität München Mit 101 Bildern B. G.Teubner Stuttgart 1988 Inhalt s Verzeichnis Vorbemerkung: Der
Anwendungsbeispiel 2 Optimierung eines Drehprozesses. Anja Fischer TU Dortmund
 Anwendungsbeispiel 2 Optimierung eines Drehprozesses Anja Fischer TU Dortmund in Zusammenarbeit mit S. Goller, U. Götze et al. Problemstellung Modellierung Drehprozess Mehrschrittmodell Ergebnis Optimierung
Anwendungsbeispiel 2 Optimierung eines Drehprozesses Anja Fischer TU Dortmund in Zusammenarbeit mit S. Goller, U. Götze et al. Problemstellung Modellierung Drehprozess Mehrschrittmodell Ergebnis Optimierung
Simulation und Optimierung in dynamischen Systemen Dr.-Ing. Christian Reinl,
 Simulation und Optimierung in dynamischen Systemen Dr.-Ing. Christian Reinl, 04.02.2011 Simulation, Systems Optimization, and Robotics Überblick Simulation / Evaluation in MME Mobilität in WSN Optimierung
Simulation und Optimierung in dynamischen Systemen Dr.-Ing. Christian Reinl, 04.02.2011 Simulation, Systems Optimization, and Robotics Überblick Simulation / Evaluation in MME Mobilität in WSN Optimierung
Lösung 01 Klassische Theoretische Physik I WS 15/16
 Karlsruher Institut für Technologie Institut für theoretische Festkörperphysik www.tfp.kit.edu Lösung Klassische Theoretische Physik I WS 5/6 Prof. Dr. G. Schön Punkte Sebastian Zanker, Daniel Mendler
Karlsruher Institut für Technologie Institut für theoretische Festkörperphysik www.tfp.kit.edu Lösung Klassische Theoretische Physik I WS 5/6 Prof. Dr. G. Schön Punkte Sebastian Zanker, Daniel Mendler
VORLESUNGEN ÜBER VARIATIONSRECHNUNG VON ORD. PROFESSOR DER MATHEMATIK AN DER UNIVERSITÄT CHICAGO
 ^ '.. '.. ' ' VORLESUNGEN ÜBER VARIATIONSRECHNUNG VON DR.OSKAR BOLZA ORD. PROFESSOR DER MATHEMATIK AN DER UNIVERSITÄT CHICAGO UMGEARBEITETE UND STARK VERMEHRTE DEUTSCHE AUSGABE DER "LECTURES ON THE CALCULUS
^ '.. '.. ' ' VORLESUNGEN ÜBER VARIATIONSRECHNUNG VON DR.OSKAR BOLZA ORD. PROFESSOR DER MATHEMATIK AN DER UNIVERSITÄT CHICAGO UMGEARBEITETE UND STARK VERMEHRTE DEUTSCHE AUSGABE DER "LECTURES ON THE CALCULUS
Computational Biology: Bioelektromagnetismus und Biomechanik
 Computational Biology: Bioelektromagnetismus und Biomechanik Biomechanik III Gliederung Wiederholung: Biomechanik II Spannungsanalyse Materialgleichungen Bewegungsgleichungen Biomechanik III Statische
Computational Biology: Bioelektromagnetismus und Biomechanik Biomechanik III Gliederung Wiederholung: Biomechanik II Spannungsanalyse Materialgleichungen Bewegungsgleichungen Biomechanik III Statische
Lösungsvorschlag zur Modulprüfung Numerische Methoden - Wintersemester 2016/17
 Institut für Analysis Prof Dr Michael Plum Lösungsvorschlag zur Modulprüfung Numerische Methoden - Wintersemester 6/7 837 Aufgabe Punkte): Gegeben sei das lineare Gleichungssystem Ax = b mit A = 6 3 und
Institut für Analysis Prof Dr Michael Plum Lösungsvorschlag zur Modulprüfung Numerische Methoden - Wintersemester 6/7 837 Aufgabe Punkte): Gegeben sei das lineare Gleichungssystem Ax = b mit A = 6 3 und
Über Optimierungsprobleme bei partiellen Dierentialgleichungen mit Zustandsbeschränkungen
 Über Optimierungsprobleme bei partiellen Dierentialgleichungen mit Zustandsbeschränkungen Arnd Rösch Universität Duisburg-Essen Fachbereich Mathematik Zell im Zillertal, 8. März 2009 Inhalt 1 Lagrangesche
Über Optimierungsprobleme bei partiellen Dierentialgleichungen mit Zustandsbeschränkungen Arnd Rösch Universität Duisburg-Essen Fachbereich Mathematik Zell im Zillertal, 8. März 2009 Inhalt 1 Lagrangesche
Übung zur Vorlesung Numerische Simulationsmethoden in der Geophysik
 Wenke Wilhelms, Julia Weißflog Institut für Geophysik und Geoinformatik Übung zur Vorlesung Numerische Simulationsmethoden in der Geophysik 04. Dezember 2013 Die Diffusionsgleichung 1D-Wärmeleitungsgleichung...
Wenke Wilhelms, Julia Weißflog Institut für Geophysik und Geoinformatik Übung zur Vorlesung Numerische Simulationsmethoden in der Geophysik 04. Dezember 2013 Die Diffusionsgleichung 1D-Wärmeleitungsgleichung...
Waermeleitungsgleichung
 Waermeleitungsgleichung October 26, 2018 1 Ausführliche Diskussion des Wärmeleitungsgleichungs-Beispiels der Vorlesung Wir betrachten die folgende Aufgabe: Ein Stab der Länge π (auf dem Zahlenstrahl von
Waermeleitungsgleichung October 26, 2018 1 Ausführliche Diskussion des Wärmeleitungsgleichungs-Beispiels der Vorlesung Wir betrachten die folgende Aufgabe: Ein Stab der Länge π (auf dem Zahlenstrahl von
400 Schwingungen. 410 Pendel 420 Untersuchung von oszillierenden Systemen
 4 Schwingungen 41 Pendel 4 Untersuchung von oszillierenden Systemen um was geht es? Schwingungen = Oszillationen Beschreibung von schwingenden Systemen Methoden zur Analyse, Modellierung und Simulation
4 Schwingungen 41 Pendel 4 Untersuchung von oszillierenden Systemen um was geht es? Schwingungen = Oszillationen Beschreibung von schwingenden Systemen Methoden zur Analyse, Modellierung und Simulation
Nebenfach Mathematik im Informatik-Studium. Martin Gugat FAU: Friedrich-Alexander-Universität Erlangen-Nürnberg 25.
 Nebenfach Mathematik im Informatik-Studium Martin Gugat martin.gugat@fau.de FAU: Friedrich-Alexander-Universität Erlangen-Nürnberg 25. Oktober 2017 Motivation Die rigorose Analyse von Algorithmen erfordert
Nebenfach Mathematik im Informatik-Studium Martin Gugat martin.gugat@fau.de FAU: Friedrich-Alexander-Universität Erlangen-Nürnberg 25. Oktober 2017 Motivation Die rigorose Analyse von Algorithmen erfordert
Regelung eines inversen Pendels
 Regelung eines inversen Pendels Dr.-Ing. Michael Buchholz 29.10.2010 Institut für Mess-, Regel- und Mikrotechnik NI Dozenten- und Ausbildertag 2010 Fürstenfeldbruck Seite 2 Anwendungsgebiete in der Forschung
Regelung eines inversen Pendels Dr.-Ing. Michael Buchholz 29.10.2010 Institut für Mess-, Regel- und Mikrotechnik NI Dozenten- und Ausbildertag 2010 Fürstenfeldbruck Seite 2 Anwendungsgebiete in der Forschung
Uberblick Kapitel 1. Kapitel 2.
 Überblick Das Buch gliedert sich in acht Kapitel, ein Softwareverzeichnis, ein Literaturverzeichnis und einen Index. Die ersten drei Kapitel legen die Grundlagen der Modellierung, der Analysis und der
Überblick Das Buch gliedert sich in acht Kapitel, ein Softwareverzeichnis, ein Literaturverzeichnis und einen Index. Die ersten drei Kapitel legen die Grundlagen der Modellierung, der Analysis und der
Computerphysik. Übungsblatt 6
 Institut für Theoretische Physik der Universität zu Köln Computerphysik Übungsblatt 6 SS 2013 Prof. Dr. Simon Trebst Michael Becker, Peter Bröcker Website: http://www.thp.uni-koeln.de/trebst/lectures/2013-compphys.html
Institut für Theoretische Physik der Universität zu Köln Computerphysik Übungsblatt 6 SS 2013 Prof. Dr. Simon Trebst Michael Becker, Peter Bröcker Website: http://www.thp.uni-koeln.de/trebst/lectures/2013-compphys.html
Optimale Regelung mechatronischer Systeme, Übungen SS 2017 Hausaufgabe
 Optimale Regelung mechatronischer Systeme, Übungen SS 17 Hausaufgabe Letztmöglicher Abgabetermin: 1.9.17, per e-mail (als zip-datei) an anton.hofer@tugraz.at 1. Vorgegeben sei das lineare zeitinvariante
Optimale Regelung mechatronischer Systeme, Übungen SS 17 Hausaufgabe Letztmöglicher Abgabetermin: 1.9.17, per e-mail (als zip-datei) an anton.hofer@tugraz.at 1. Vorgegeben sei das lineare zeitinvariante
4 Dynamische Optimierung
 4 Dynamische Optimierung 4. Grundlagen der Variationsrechnung 4.. Problemformulierung Im Gegensatz zu den bisher betrachteten statischen Optimierungsproblemen, bei denen die Optimierungsvariablen x in
4 Dynamische Optimierung 4. Grundlagen der Variationsrechnung 4.. Problemformulierung Im Gegensatz zu den bisher betrachteten statischen Optimierungsproblemen, bei denen die Optimierungsvariablen x in
Nebenfach Mathematik im Informatik-Studium. Martin Gugat FAU: Friedrich-Alexander-Universität Erlangen-Nürnberg 26.
 Nebenfach Mathematik im Informatik-Studium Martin Gugat martin.gugat@fau.de FAU: Friedrich-Alexander-Universität Erlangen-Nürnberg 26. Oktober 2016 Motivation Die rigorose Analyse von Algorithmen erfordert
Nebenfach Mathematik im Informatik-Studium Martin Gugat martin.gugat@fau.de FAU: Friedrich-Alexander-Universität Erlangen-Nürnberg 26. Oktober 2016 Motivation Die rigorose Analyse von Algorithmen erfordert
14 Numerik hyperbolischer Differentialgleichungen
 Numerik II 256 14 Numerik hyperbolischer Differentialgleichungen Während parabolische PDG Diffusionsvorgänge modellieren stellen hyperbolische PDG Modelle für Wellenphänomene dar. Wichtigste Anwendungsgebiete
Numerik II 256 14 Numerik hyperbolischer Differentialgleichungen Während parabolische PDG Diffusionsvorgänge modellieren stellen hyperbolische PDG Modelle für Wellenphänomene dar. Wichtigste Anwendungsgebiete