Rastkräfte bei Lineardirektantrieben ein Vergleich geometrischer und elektronischer Kompensationsmöglichkeiten
|
|
|
- Frank Abel
- vor 5 Jahren
- Abrufe
Transkript
1 Institut für Konstruktion und Fertigung in der Feinwerktechnik Universität Stuttgart Rastkräfte bei Lineardirektantrieben ein Vergleich geometrischer und elektronischer Kompensationsmöglichkeiten Dipl.-Ing. P. Joerges Prof. Dr. W. Schinköthe Institut für Konstruktion und Fertigung in der Feinwerktechnik, IKFF Universität Stuttgart 19. März 2010
2 Übersicht 1. Motivation, Ziel 2. Entstehung von Rastkräften 3. Einflussmöglichkeiten auf Rastkräfte - Modifikationsmöglichkeiten bei der Geometrie - Kompensationsmöglichkeiten und Regelung 4. Vergleich zwischen Geometrie und Regelung 5. Zusammenfassung 2
3 Motivation: Ausbaufähige Übersicht und Bewertung der Modifikations- Möglichkeiten (mechanisch, elektrisch) für das Bewegungsverhalten bei dynamischen Positionierprozessen unter Berücksichtigung von Rastkräften bei Lineardirektantrieben (LDA) Ziel: Überprüfen und Ableiten von definierten Konstruktions- (mechanisch) und Regelungs-/Steuerparadigmen (elektronisch) für LDA mit eisenbehafteten Läufern, um rastkraftreduzierend und/oder kompensierend zu wirken 3
4 Rastkräfte: engl.: Cogging Force, amerik.: Detent Force magnetische Störkraft als Reluktanzkraft wirkt zwischen Eisen des Primärteils und Permanentmagneten des Sekundärteils abhängig von der relativen Position des Primärteils zu Permanentmagneten unabhängig vom Motorstrom in eisenlosen Läufern vernachlässigbar reduzierbar durch Geometrieoptimierung und regelungstechnische Verfahren periodisch wiederkehrend als Fourierreihe darstellbar Zahn Spulen Primärteil Rückschluss Magnete Sekundärteil 4

5 Effekte der Rastkräfte: Verschlechterung der Positioniergenauigkeit Verschlechterung der Bahnfolgegenauigkeit Halten des Motors ohne Bestromung Geschwindigkeitsschwankungen Schwingungen, Instabilitäten Starker Einfluss bei geringer Geschwindigkeit da Schubkraft geringer Nichtlinearitäten 5
6 Vorgehensweise: Rastkraft-Untersuchung (asymmetrische LDA) Auslegung der Geometrie mittels FEM-Simulation + Realisierung Auslegung der Regelung durch Simulation + Realisierung Flachspulläufer Zahnspulläufer allgemeine vermaschte Regelkreise z.b. PI- Regler modellbasierte Regelkreise z.b. Internal-Modell- Control (IMC) 6
 Rückschlusslänge Anzahl der Nuten, Nutproportionen (Länge, Höhe, Breite, Drehung,.")
7 Geometrische Modifikation: Mechanisch : Variation des Luftspaltes Luftspalthöhe Flussleitbleche im Luftspalt Magnete Magnetdrehung Magnetabstände Magnetlänge Magnetform Rückschluss Rückschlusstyp (Flachspulmotor, Zahnspulmotor) Rückschlusslänge Anzahl der Nuten, Nutproportionen (Länge, Höhe, Breite, Drehung,..) Zahnform, Endzahn (Zahnproportionen, Carterscher Faktor, ) 7

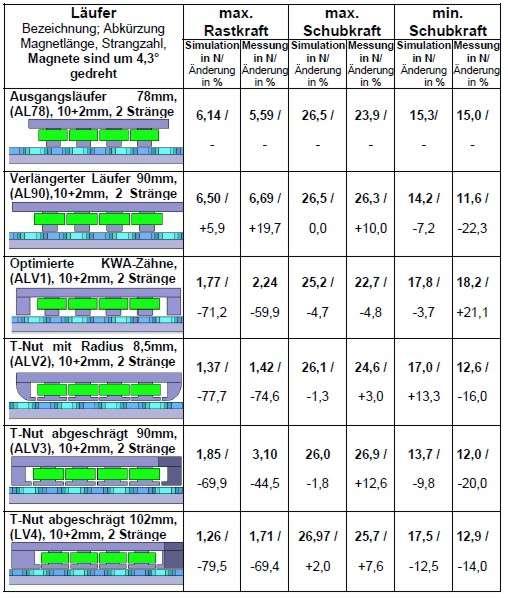
8 Kraft in N Kraft in N Motivation, Ziel Rastkräfte Geometrie Regelung Vergleich Zusammenfassung Beispiel Endzahnoptimierung: Ausgangsmodell Rastkraft T-Nut Motor mit Endzahnradius Rastkraft über Endzahnradius Weg in x mm 0 8 8,5 8,7 8,9 9,1 9,3 9,5 T-Nut mit Radius 8,5mm T-Nut mit Radius 8,7mm Radius in mm T-Nut mit Radius 8,9mm T-Nut mit Radius 9,3mm T-Nut mit Radius 9,1mm Ausgangsläufer max. Rastkraft Ausgangsläufer 8
9 Beispiel Endzahnoptimierung: 9
10 Kraft in N Kraft in N Motivation, Ziel Rastkräfte Geometrie Regelung Vergleich Zusammenfassung Ergebnisse der Geometrievariation beim Flachspulläufer: Rückschluss 127,5mm Rückschluss 139,5mm gerade geschrägt RS 127,5mm gerade FSL1, 25mm,3 Stränge RS 139,5mm geschrägt FSL2, 25mm, 3 Stränge Spule1 987A Spule2 987A Spule3 987A Spule1-987A Spule2-987A Spule3-987A Schubkraft Rastkraft Spule1 987A Spule2 987A Spule3 987A Spule1-987A Spule2-987A Spule3-987A Schubkraft Rastkraft Weg in mm Weg in mm Rastkraft: 12,3 N min. Schubkraft: 26,5N max. Schubkraft: 51,9N Rastkraft: 1,3 N min. Schubkraft: 37,4N max. Schubkraft: 42,3N 10
11 Ergebnisse der Geometrievariation beim Flachspulläufer: Rückschluss 127,5mm Rückschluss 139,5mm gerade geschrägt Bahnfolgegenauigkeit mit IMC-Regler Nicht optimal eingestellt, um Einfluss der Geometrie fest zu stellen! 11
12 Ergebnisse der Geometrievariation beim Flachspulläufer: Rückschluss 127,5mm Rückschluss 139,5mm gerade geschrägt Positioniergenauigkeit mit IMC-Regler Nicht optimal eingestellt, um Einfluss der Geometrie fest zu stellen! 12
13 Möglichkeiten der Kompensation: Elektronisch, Regelung: Kommutierung Sinuskommutierung, 3-strängiges System, 30 Watt pro Spule, getaktet bei 30 khz mit PWM. Reglermodelle/Regelkreisstrukturen PI Regler, als Standard-Regler Kaskadenreglung Kaskadenregelung mit Störgrößenaufschaltung Linear quadratische Regelung mit Beobachter (LQR) IMC-Regelung mit Störgrößenaufschaltung Regleroptimierung Analytisch Modellklassifizierung Experimentell Modellklassifizierung 13

14 Möglichkeiten der Kompensation: PI-Regler 14
 zu geschaltet.")

15 Modellbasierte Regelung: Internal Model Control (IMC) Der realen Regelstrecke G S (s) wird ein Streckenmodell Ĝ S (s) zu geschaltet. Die Differenz der Streckenausgänge wird dem Regler G IMC (s) zurück geführt. allgemeiner Regelkreis: Störgrößenaufschaltung Die Störgröße z wird erfasst und über eine entsprechende Übertragungsfunktion aufgeschaltet. 15
16 Modellbasierte Regelung: Internal Model Control (IMC) Der realen Regelstrecke G S (s) wird ein Streckenmodell Ĝ S (s) zu geschaltet. Die Differenz der Streckenausgänge IMC-Reglers mit Störgrößenaufschaltung wird dem Regler G IMC (s) zurück geführt. allgemeiner Regelkreis: Störgrößenaufschaltung Die Störgröße z wird erfasst und über eine entsprechende Übertragungsfunktion aufgeschaltet. 16
17 Zustandsregelungen: geschlossener Reglerentwurf für die gesamte Regelstrecke (lineare Regler) x x i 0 x c 1 d 3 0 lb x m m m Bl R i 0 L L L U 1 0 m 0 ein F Rast Regelstrecke: Störgröße: IMC-Regler: Störgrößen-Regler: 17
18 Ergebnisse für die Reglung: IMC-Regler ohne IMC-Regler mit Störgrößenaufschaltung Störgrößenaufschaltung Rückschluss 127,5mm, Rastkraft: 12,3 N Bahnfolgegenauigkeit 18
19 Ergebnisse für die Reglung: IMC-Regler ohne IMC-Regler mit Störgrößenaufschaltung Störgrößenaufschaltung Rückschluss 127,5mm, Rastkraft: 12,3 N Positioniergenauigkeit Positioniergenauigkeit 19

20 Ergebnisse für die Reglung: IMC-Regler mit Störgrößenaufschaltung 20
21 Vergleich der Positioniergenauigkeit: Rückschluss 127,5mm, gerade Geometrie: 30% Rückschluss 139,5mm, geschrägt IMC ohne Störgrößenaufschaltung IMC-Regelung 97% IMC mit Störgrößenaufschaltung 21
22 Zusammenfassung: Ergebnisse der Geometrievariation Zahl der zu variierenden Parameter lässt sich stark reduzieren, 25 7 Verringerung der Rastkraft auf Werte zwischen 1,5 N und 2,5 N bei optimierten Flachspul- und Zahnspulmotoren, Ausgangsbasis: 12,3N Erhöhung der Positioniergenauigkeit um 30% Der Vernetzungsgrad ist für Motorauslegung bei FEM mit entscheidend 22
23 Zusammenfassung: Ergebnisse der IMC-Kompensationsregelung Rastkräfte sind vollständig ausregelbar Verbesserung der Positioniergenauigkeit, von 200µm auf bis zu 7µm, 97% Verbesserung der Bahnfolgegenauigkeit, 48% Verringerung der Geschwindigkeitswelligkeit Reglerauslegung bis zu 50% schneller als FEM-Simulation 23
24 Vielen Dank für Ihre Aufmerksamkeit! 24
Veröffentlichungen am IKFF. Geometrisch optimierte Rastkräfte bei Lineardirektantrieben. Geometrical optimized cogging forces at linear direct drives
 Veröffentlichungen am IKFF Geometrisch optimierte Rastkräfte bei Lineardirektantrieben Geometrical optimized cogging forces at linear direct drives P. Joerges, W. Schinköthe (IKFF) Beitrag zur 8. ETG/GMM-Fachtagung
Veröffentlichungen am IKFF Geometrisch optimierte Rastkräfte bei Lineardirektantrieben Geometrical optimized cogging forces at linear direct drives P. Joerges, W. Schinköthe (IKFF) Beitrag zur 8. ETG/GMM-Fachtagung
Simulationsgestützte Auslegung von Lineardirektantrieben mit MAXWELL, SIMPLORER und ANSYS
 Simulationsgestützte Auslegung von Lineardirektantrieben mit MAXWELL, SIMPLORER und ANSYS Dipl.-Ing. Matthias Ulmer, Prof. Dr.-Ing. Wolfgang Schinköthe Universität Stuttgart, Institut für Konstruktion
Simulationsgestützte Auslegung von Lineardirektantrieben mit MAXWELL, SIMPLORER und ANSYS Dipl.-Ing. Matthias Ulmer, Prof. Dr.-Ing. Wolfgang Schinköthe Universität Stuttgart, Institut für Konstruktion
Simulationsgestützte tzte Auslegung von Lineardirektantrieben mit MAXWELL, SIMPLORER und ANSYS. Matthias Ulmer, Universität Stuttgart
 Simulationsgestützte tzte Auslegung von Lineardirektantrieben mit MAXWELL, SIMPLORER und ANSYS Matthias Ulmer, Universität Stuttgart Gliederung 1. Motivation und Zielsetzung 2. Elektrodynamische Lineardirektantriebe
Simulationsgestützte tzte Auslegung von Lineardirektantrieben mit MAXWELL, SIMPLORER und ANSYS Matthias Ulmer, Universität Stuttgart Gliederung 1. Motivation und Zielsetzung 2. Elektrodynamische Lineardirektantriebe
Auslegung und Ansteuerung von Mikrolinearmotoren
 Auslegung Ansteuerung von Mikrolinearmotoren K.Wiedmann, S.Demmig, R. Gehrking, B. Ponick, A. Mertens Hannover, 27.9.27 Gliederung Aufbau eines Mikrolinearmotors FEM-Modell des Mikrolinearmotors Charakterisierung
Auslegung Ansteuerung von Mikrolinearmotoren K.Wiedmann, S.Demmig, R. Gehrking, B. Ponick, A. Mertens Hannover, 27.9.27 Gliederung Aufbau eines Mikrolinearmotors FEM-Modell des Mikrolinearmotors Charakterisierung
Mehrgrößenregelung. Aufgabensammlung
 Fakultät für Elektrotechnik und Informationstechnik Professur Regelungstechnik und Systemdynamik Prof. Dr.-Ing. Stefan Streif Mehrgrößenregelung Aufgabensammlung Dr.-Ing. Arne-Jens Hempel M.Sc. Thomas
Fakultät für Elektrotechnik und Informationstechnik Professur Regelungstechnik und Systemdynamik Prof. Dr.-Ing. Stefan Streif Mehrgrößenregelung Aufgabensammlung Dr.-Ing. Arne-Jens Hempel M.Sc. Thomas
Crash-Kurs Regelungstechnik
 Dr.-Ing. Jörg Kahlert Crash-Kurs Regelungstechnik Eine praxisorientierte Einführung mit Begleit-Software VDE VERLAG GMBH Berlin Offenbach Inhaltsverzeichnis 1 Einführung 11 1.1 Aufgaben der Regelungstechnik
Dr.-Ing. Jörg Kahlert Crash-Kurs Regelungstechnik Eine praxisorientierte Einführung mit Begleit-Software VDE VERLAG GMBH Berlin Offenbach Inhaltsverzeichnis 1 Einführung 11 1.1 Aufgaben der Regelungstechnik
Entwicklung eines getriebelosen Transversalflussgenerators für Fluss-Strom-Anwendungen. S. Hieke, M. Stamann, T. Schallschmidt, R.
 Entwicklung eines getriebelosen Transversalflussgenerators für Fluss-Strom-Anwendungen S. Hieke, M. Stamann, T. Schallschmidt, R. Leidhold Lehrstuhl für Elektrische Antriebssysteme 27.09.16, Magdeburg
Entwicklung eines getriebelosen Transversalflussgenerators für Fluss-Strom-Anwendungen S. Hieke, M. Stamann, T. Schallschmidt, R. Leidhold Lehrstuhl für Elektrische Antriebssysteme 27.09.16, Magdeburg
Magnettechnik Auslegungen
 Magnettechnik Auslegungen Dimensionierung, Werkstoffe, Anwendungen Dr.-Ing. B. Gundelsweiler 25.06.10, 2014, Dr. Bernd Dr. Bernd Gundelsweiler Gundelsweiler Zweisträngiger Antrieb mit bewegtem heteropolaren
Magnettechnik Auslegungen Dimensionierung, Werkstoffe, Anwendungen Dr.-Ing. B. Gundelsweiler 25.06.10, 2014, Dr. Bernd Dr. Bernd Gundelsweiler Gundelsweiler Zweisträngiger Antrieb mit bewegtem heteropolaren
Mechatronik und elektrische Antriebe
 Prof. Dr. Ing. Joachim Böcker Mechatronik und elektrische Antriebe 03.09.2014 Name: Matrikelnummer: Vorname: Studiengang: Aufgabe: (Punkte) 1 (30) 2 (18) 3 (22) Gesamt (60) Note Bearbeitungszeit: 120 Minuten
Prof. Dr. Ing. Joachim Böcker Mechatronik und elektrische Antriebe 03.09.2014 Name: Matrikelnummer: Vorname: Studiengang: Aufgabe: (Punkte) 1 (30) 2 (18) 3 (22) Gesamt (60) Note Bearbeitungszeit: 120 Minuten
Praktische Regelungstechnik
 Dieter Schulz Praktische Regelungstechnik Ein Leitfaden für Einsteiger Hüthig Buch Verlag Heidelberg Inhaltsverzeichnis 1 Technische Systeme 1 1.1 Bildliche Darstellungen technischer Systeme 2 1.2 Signalarten
Dieter Schulz Praktische Regelungstechnik Ein Leitfaden für Einsteiger Hüthig Buch Verlag Heidelberg Inhaltsverzeichnis 1 Technische Systeme 1 1.1 Bildliche Darstellungen technischer Systeme 2 1.2 Signalarten
Modellierung eines dynamischen Motorprüfstands. Modellbildung Identifikation Simulink-Modell Optimale Regelung
 Modellierung eines dynamischen Motorprüfstands Modellbildung Identifikation Simulink-Modell Optimale Regelung Josef Blumenschein Patrick Schrangl Aufgaben Modellbildung und Identifikation " Verbrennungsmotor
Modellierung eines dynamischen Motorprüfstands Modellbildung Identifikation Simulink-Modell Optimale Regelung Josef Blumenschein Patrick Schrangl Aufgaben Modellbildung und Identifikation " Verbrennungsmotor
Einfluss von Spannungsoberschwingungen und Rastmomenten auf den Gleichlauf von Servoantrieben mit Permanentmagnet-Synchronmotoren
 Einfluss von Spannungsoberschwingungen und Rastmomenten auf den Gleichlauf von Servoantrieben mit Permanentmagnet-Synchronmotoren Influence of voltage harmonics and cogging torque on speed deviations of
Einfluss von Spannungsoberschwingungen und Rastmomenten auf den Gleichlauf von Servoantrieben mit Permanentmagnet-Synchronmotoren Influence of voltage harmonics and cogging torque on speed deviations of
Vorstellung des Großen Belegs: Entwurf eines modellbasierten Regelungssystems für einen totzeitbehafteten Prozess
 Fakultät Informatik Institut für angewandte Informatik- Professur Technische Informationssysteme Vorstellung des Großen Belegs: Entwurf eines modellbasierten Regelungssystems für einen totzeitbehafteten
Fakultät Informatik Institut für angewandte Informatik- Professur Technische Informationssysteme Vorstellung des Großen Belegs: Entwurf eines modellbasierten Regelungssystems für einen totzeitbehafteten
Motoren und Getriebe. Linearmotoren MCL - dynamisch und kompakt
 Linearmotoren MCL - dynamisch und kompakt 2 Bosch Rexroth AG Electric Drives and Controls Dokumentation Projektierungshilfe Linearmotor ohne Eisenkern Maximalkraft bis 3.320 N Maximalgeschwindigkeit bis
Linearmotoren MCL - dynamisch und kompakt 2 Bosch Rexroth AG Electric Drives and Controls Dokumentation Projektierungshilfe Linearmotor ohne Eisenkern Maximalkraft bis 3.320 N Maximalgeschwindigkeit bis
Regelungstechnik I. Heinz Unbehauen. Klassische Verfahren zur Analyse und Synthese linearer kontinuierlicher Regelsysteme
 Heinz Unbehauen Regelungstechnik I Klassische Verfahren zur Analyse und Synthese linearer kontinuierlicher Regelsysteme 7., überarbeitete und erweiterte Auflage Mit 192 Bildern und 28 TabeUen vieweg INHALT
Heinz Unbehauen Regelungstechnik I Klassische Verfahren zur Analyse und Synthese linearer kontinuierlicher Regelsysteme 7., überarbeitete und erweiterte Auflage Mit 192 Bildern und 28 TabeUen vieweg INHALT
Regelungstechnik I. Heinz JUnbehauen. Klassische Verfahren zur Analyse und Synthese linearer kontinuierlicher Regelsysteme. 3., durchgesehene Auflage
 Heinz JUnbehauen Regelungstechnik I Klassische Verfahren zur Analyse und Synthese linearer kontinuierlicher Regelsysteme 3., durchgesehene Auflage Mit 192 Bildern V] Friedr. Vieweg & Sohn Braunschweig/Wiesbaden
Heinz JUnbehauen Regelungstechnik I Klassische Verfahren zur Analyse und Synthese linearer kontinuierlicher Regelsysteme 3., durchgesehene Auflage Mit 192 Bildern V] Friedr. Vieweg & Sohn Braunschweig/Wiesbaden
Entwurf, Test und Analyse adaptiver Regelungsstrategien für einen nichtlinearen totzeitbehafteten technischen Prozess
 Fakultät Informatik Institut für angewandte Informatik- Professur Technische Informationssysteme Verteidigung der Diplomarbeit: Entwurf, Test und Analyse adaptiver Regelungsstrategien für einen nichtlinearen
Fakultät Informatik Institut für angewandte Informatik- Professur Technische Informationssysteme Verteidigung der Diplomarbeit: Entwurf, Test und Analyse adaptiver Regelungsstrategien für einen nichtlinearen
Institut für Leistungselektronik und Elektrische Antriebe. Regelungstechnik II. Übung 1
 Regelungstechnik II Übung 1 Übungen Regelungstechnik II Steffen Bintz M.Sc. Tel.: (0711) 685-67371 E-Mail: steffen.bintz@ilea.uni-stuttgart.de Die Unterlagen und Aufgaben zu dieser Präsentation finden
Regelungstechnik II Übung 1 Übungen Regelungstechnik II Steffen Bintz M.Sc. Tel.: (0711) 685-67371 E-Mail: steffen.bintz@ilea.uni-stuttgart.de Die Unterlagen und Aufgaben zu dieser Präsentation finden
Nichtlineares Verhalten in Regelstrecken
 Institut für Leistungselektronik und Elektrische Antriebe Prof. Dr.-Ing. J. Roth-Stielow Umdruck 4: Nichtlineares Verhalten in Regelstrecken 4.1 Einführung Bei allen bisherigen Untersuchungen durfte davon
Institut für Leistungselektronik und Elektrische Antriebe Prof. Dr.-Ing. J. Roth-Stielow Umdruck 4: Nichtlineares Verhalten in Regelstrecken 4.1 Einführung Bei allen bisherigen Untersuchungen durfte davon
Birgit Steffenhagen. Formelsammlung. Regelungstechnik. Mit 300 Bildern. Fachbuchverlag Leipzig im Carl Hanser Verlag
 Birgit Steffenhagen Formelsammlung Regelungstechnik Mit 300 Bildern Fachbuchverlag Leipzig im Carl Hanser Verlag Inhaltsverzeichnis 1 Grundbegriffe 11 1.1 Systeme und Signale 11 1.2 Steuerung und Regelung
Birgit Steffenhagen Formelsammlung Regelungstechnik Mit 300 Bildern Fachbuchverlag Leipzig im Carl Hanser Verlag Inhaltsverzeichnis 1 Grundbegriffe 11 1.1 Systeme und Signale 11 1.2 Steuerung und Regelung
Elektromagnetischer Mikrolinearmotor mit integrierter magnetischer Führung
 LNQE on the Road in der Elektrotechnik Inhalt Elektromagnetische Mikrolinearmotoren Simulationen FEM-Modell Ergebnisse Spezielle Designregeln Charakterisierung durch Messungen Integrierte magnetische Führung
LNQE on the Road in der Elektrotechnik Inhalt Elektromagnetische Mikrolinearmotoren Simulationen FEM-Modell Ergebnisse Spezielle Designregeln Charakterisierung durch Messungen Integrierte magnetische Führung
Mehrzieloptimierung von PMSM für Hybrid- und Elektrofahrzeuge Florian Bittner, FEMAG Anwendertreffen 2013
 Mehrzieloptimierung von PMSM für Hybrid- und Elektrofahrzeuge Agenda Motivation Kriging-gestützte multikriterielle Partikelschwarmoptimierung Kopplung mit FEMAG Optimierung einer 10-poligen PMSM Zusammenfassung
Mehrzieloptimierung von PMSM für Hybrid- und Elektrofahrzeuge Agenda Motivation Kriging-gestützte multikriterielle Partikelschwarmoptimierung Kopplung mit FEMAG Optimierung einer 10-poligen PMSM Zusammenfassung
Regelungstechnik für Ingenieure
 Serge Zacher Manfred Reuter Regelungstechnik für Ingenieure Analyse, Simulation und Entwurf von Regelkreisen 13., überarbeitete und erweiterte Auflage Mit 397 Abbildungen, 96 Beispielen und 32 Aufgaben
Serge Zacher Manfred Reuter Regelungstechnik für Ingenieure Analyse, Simulation und Entwurf von Regelkreisen 13., überarbeitete und erweiterte Auflage Mit 397 Abbildungen, 96 Beispielen und 32 Aufgaben
Regelungstechnik für Ingenieure
 Manfred Reuter Serge Zacher Regelungstechnik für Ingenieure Analyse, Simulation und Entwurf von Regelkreisen 12., korrigierte und erweiterte Auflage Mit 388 Abbildungen, 11 Beispielen und 34 Aufgaben STUDIUM
Manfred Reuter Serge Zacher Regelungstechnik für Ingenieure Analyse, Simulation und Entwurf von Regelkreisen 12., korrigierte und erweiterte Auflage Mit 388 Abbildungen, 11 Beispielen und 34 Aufgaben STUDIUM
Klausur im Fach: Regelungs- und Systemtechnik 1
 (in Druckschrift ausfüllen!) Univ.-Prof. Dr.-Ing. habil. Ch. Ament Name: Vorname: Matr.-Nr.: Sem.-Gr.: Anzahl der abgegebenen Blätter: 3 Klausur im Fach: Prüfungstermin: 26.03.2013 Prüfungszeit: 11:30
(in Druckschrift ausfüllen!) Univ.-Prof. Dr.-Ing. habil. Ch. Ament Name: Vorname: Matr.-Nr.: Sem.-Gr.: Anzahl der abgegebenen Blätter: 3 Klausur im Fach: Prüfungstermin: 26.03.2013 Prüfungszeit: 11:30
Regelungstechnik für Ingenieure
 Manfred Reuter Regelungstechnik für Ingenieure 9., überarbeitete und erweiterte Auflage Mit 291 Bildern, 43 Beispiele und 27 Aufgaben vieweg VII Inhaltsverzeichnis Formelzeichen XI 1 Einleitung 1 1.1 Das
Manfred Reuter Regelungstechnik für Ingenieure 9., überarbeitete und erweiterte Auflage Mit 291 Bildern, 43 Beispiele und 27 Aufgaben vieweg VII Inhaltsverzeichnis Formelzeichen XI 1 Einleitung 1 1.1 Das
Höhenregelung eines schwebenden Magneten
 Technische Universität Berlin MRT M R T Prof. Dr.-Ing. R. King Fakultät III Institut für Prozess- und Anlagentechnik Fachgebiet Mess- und Regelungstechnik TU Berlin. Sekretariat. P2-1. Mess- und Regelungstechnik
Technische Universität Berlin MRT M R T Prof. Dr.-Ing. R. King Fakultät III Institut für Prozess- und Anlagentechnik Fachgebiet Mess- und Regelungstechnik TU Berlin. Sekretariat. P2-1. Mess- und Regelungstechnik
Duale Regelungstechnik
 Prof. Dr.-lng. Serge Zacher Duale Regelungstechnik Methoden und Werkzeuge der lnformationstechnologie für die Regelungstechnik mit Prozessrechnern VDE VERLAG GMBH Inhalt 1 1.1 1.2 1.3 1.4 1.4.1 1.4.2 1.4.3
Prof. Dr.-lng. Serge Zacher Duale Regelungstechnik Methoden und Werkzeuge der lnformationstechnologie für die Regelungstechnik mit Prozessrechnern VDE VERLAG GMBH Inhalt 1 1.1 1.2 1.3 1.4 1.4.1 1.4.2 1.4.3
Regelungstechnik 1. Systemtheoretische Gmndlagen, Analyse und Entwurf einschleifiger Regelungen. Jan Lunze. 8., neu bearbeitete Auflage
 Jan Lunze Regelungstechnik 1 Systemtheoretische Gmndlagen, Analyse und Entwurf einschleifiger Regelungen 8., neu bearbeitete Auflage Mit 413 Abbildungen, 75 Beispielen, 165 Übungsaufgaben sowie einer Einführung
Jan Lunze Regelungstechnik 1 Systemtheoretische Gmndlagen, Analyse und Entwurf einschleifiger Regelungen 8., neu bearbeitete Auflage Mit 413 Abbildungen, 75 Beispielen, 165 Übungsaufgaben sowie einer Einführung
Einführung in die Regelungstechnik
 Einführung in die Regelungstechnik Alexander Schaefer 1 Inhalt Was ist Regelungstechnik? Modellbildung Steuerung Anwendungsbeispiel Regelung Reglertypen 2 Was ist Regelungstechnik? Ingenieurwissenschaft
Einführung in die Regelungstechnik Alexander Schaefer 1 Inhalt Was ist Regelungstechnik? Modellbildung Steuerung Anwendungsbeispiel Regelung Reglertypen 2 Was ist Regelungstechnik? Ingenieurwissenschaft
Linearmotoren Baureihe T
 Antriebstechnik für Profis Motoren Regler Steuerungen Linearmotoren Baureihe T Das Kraftpaket für große Massen mit Ironcore Linearmotoren Der Ironcore* Linearmotor der Baureihe T Der Ironcore* Linearmotor
Antriebstechnik für Profis Motoren Regler Steuerungen Linearmotoren Baureihe T Das Kraftpaket für große Massen mit Ironcore Linearmotoren Der Ironcore* Linearmotor der Baureihe T Der Ironcore* Linearmotor
Regelungstechnik für Ingenieure
 Manfred Reuter Regelungstechnik für Ingenieure 7., überarbeitete und erweiterte Auflage Mit 322 Bildern Friedr. Vieweg & Sohn Braunschweig/Wiesbaden Inhaltsverzeichnis Formelzeichen 1 Einführung 1 1.1
Manfred Reuter Regelungstechnik für Ingenieure 7., überarbeitete und erweiterte Auflage Mit 322 Bildern Friedr. Vieweg & Sohn Braunschweig/Wiesbaden Inhaltsverzeichnis Formelzeichen 1 Einführung 1 1.1
Regelungstechnik Aufgaben
 Serge Zacher Regelungstechnik Aufgaben Lineare, Zweipunkt- und digitale Regelung 2., überarbeitete und erweiterte Auflage Mit 126 Aufgaben und MATLAB-Simulationen ZACHE VII Inhalt 1. Formelsammlung 1 1.1
Serge Zacher Regelungstechnik Aufgaben Lineare, Zweipunkt- und digitale Regelung 2., überarbeitete und erweiterte Auflage Mit 126 Aufgaben und MATLAB-Simulationen ZACHE VII Inhalt 1. Formelsammlung 1 1.1
Veröffentlichungen am IKFF. Thermische Analyse der Antriebsspulen von Lineardirektantrieben mit MAXWELL und ANSYS
 Veröffentlichungen am IKFF Thermische Analyse der Antriebsspulen von Lineardirektantrieben mit MAXWELL und ANSYS M. Ulmer, W. Schinköthe (IKFF) Beitrag zur 27. CADFEM Users' Meeting 18. - 20. November
Veröffentlichungen am IKFF Thermische Analyse der Antriebsspulen von Lineardirektantrieben mit MAXWELL und ANSYS M. Ulmer, W. Schinköthe (IKFF) Beitrag zur 27. CADFEM Users' Meeting 18. - 20. November
Veröffentlichungen am IKFF. Optimierter Energieeinsatz durch induktive Erwärmung von Spritzgießwerkzeugen
 Veröffentlichungen am IKFF Optimierter Energieeinsatz durch induktive Erwärmung von Spritzgießwerkzeugen FEM unterstützte Auslegung von induktiven Werkzeugheizsystemen M. Zülch E. Burkard W. Schinköthe
Veröffentlichungen am IKFF Optimierter Energieeinsatz durch induktive Erwärmung von Spritzgießwerkzeugen FEM unterstützte Auslegung von induktiven Werkzeugheizsystemen M. Zülch E. Burkard W. Schinköthe
Einführung in die Mechatroniksimulation
 in die Mechatroniksimulation Prof. Dr. Ruprecht Altenburger ZHAW Institut für Mechatronische Systeme VPE Workshop, Rapperswil am 23.1.2014 1 / 19 1 Einleitung Mechatroniksimulation Modell starrer Körper
in die Mechatroniksimulation Prof. Dr. Ruprecht Altenburger ZHAW Institut für Mechatronische Systeme VPE Workshop, Rapperswil am 23.1.2014 1 / 19 1 Einleitung Mechatroniksimulation Modell starrer Körper
Inhaltsverzeichnis. Heinz Mann, Horst Schiffelgen, Rainer Froriep. Einführung in die Regelungstechnik
 Inhaltsverzeichnis Heinz Mann, Horst Schiffelgen, Rainer Froriep Einführung in die Regelungstechnik Analoge und digitale Regelung, Fuzzy-Regler, Regel-Realisierung, Software ISBN: 978-3-446-41765-6 Weitere
Inhaltsverzeichnis Heinz Mann, Horst Schiffelgen, Rainer Froriep Einführung in die Regelungstechnik Analoge und digitale Regelung, Fuzzy-Regler, Regel-Realisierung, Software ISBN: 978-3-446-41765-6 Weitere
maxon EC motor Bürstenlose DC Motoren: Eine Einführung
 maxon EC motor Bürstenlose DC Motoren: Eine Einführung Varianten: maxon EC Motorfamilien Gemeinsamkeiten Funktionsprinzip Wicklungsbeschaltung, Eisenverluste Elektronische Kommutierungssysteme Blockkommutierung
maxon EC motor Bürstenlose DC Motoren: Eine Einführung Varianten: maxon EC Motorfamilien Gemeinsamkeiten Funktionsprinzip Wicklungsbeschaltung, Eisenverluste Elektronische Kommutierungssysteme Blockkommutierung
Einführung in die Regelungstechnik
 Einführung in die Regelungstechnik WS-Vorlesung SRT Mechatronik 2007 TEIL REGELUNG Prof. Datum Termin Veranstaltung Doppelstunde Teil1 Doppelstunde Teil2 Folien 1 Sa 01.09.2007 8:30 11:45 V1 V Einführung
Einführung in die Regelungstechnik WS-Vorlesung SRT Mechatronik 2007 TEIL REGELUNG Prof. Datum Termin Veranstaltung Doppelstunde Teil1 Doppelstunde Teil2 Folien 1 Sa 01.09.2007 8:30 11:45 V1 V Einführung
Einführung in die Regelungstechnik
 Einführung in die Regelungstechnik Heinz Mann, Horst Schiffelgen, Rainer Froriep Analoge und digitale Regelung, Fuzzy-Regler, Regel- Realisierung, Software ISBN 3-446-40303-5 Inhaltsverzeichnis Weitere
Einführung in die Regelungstechnik Heinz Mann, Horst Schiffelgen, Rainer Froriep Analoge und digitale Regelung, Fuzzy-Regler, Regel- Realisierung, Software ISBN 3-446-40303-5 Inhaltsverzeichnis Weitere
PM-Maschinen, Konzepte, Simulation FEMAG
 PM-Maschinen, Konzepte, Simulation FEMAG Konzepte, Topologien Bewertungskriterien Vergleich der Wicklungs- und Magnetkonzepte Magnetwerkstoffe: NdFeB oder Ferrit Simulation mit FEMAG PM-Maschinen, Konzepte,
PM-Maschinen, Konzepte, Simulation FEMAG Konzepte, Topologien Bewertungskriterien Vergleich der Wicklungs- und Magnetkonzepte Magnetwerkstoffe: NdFeB oder Ferrit Simulation mit FEMAG PM-Maschinen, Konzepte,
Linearmotoren sicher positioniert
 Linearmotoren sicher positioniert Reduzierung der Kraftwelligkeit synchroner Linearmotoren CHRISTOF RÖHRIG Synchrone Linearmotoren kommen oftmals dann zum Einsatz, wenn Linearbewegungen mit hohen Geschwindigkeiten
Linearmotoren sicher positioniert Reduzierung der Kraftwelligkeit synchroner Linearmotoren CHRISTOF RÖHRIG Synchrone Linearmotoren kommen oftmals dann zum Einsatz, wenn Linearbewegungen mit hohen Geschwindigkeiten
Spulenanordnung nach Helmholtz, zur dynamischen Untersuchung von Magnetfeldsensoren bei veränderlicher Umgebungstemperatur
 Spulenanordnung nach Helmholtz, zur dynamischen Untersuchung von Magnetfeldsensoren bei veränderlicher Umgebungstemperatur Magnetics 4 Freaks Präsentation 20. Mai 2015 Autoren: Dipl.-Ing. (FH) Ralph Wystup
Spulenanordnung nach Helmholtz, zur dynamischen Untersuchung von Magnetfeldsensoren bei veränderlicher Umgebungstemperatur Magnetics 4 Freaks Präsentation 20. Mai 2015 Autoren: Dipl.-Ing. (FH) Ralph Wystup
SYNTHESE LINEARER REGELUNGEN
 Synthese Linearer Regelungen - Formelsammlung von 8 SYNTHESE LINEARER REGELUNGEN FORMELSAMMLUNG UND MERKZETTEL INHALT 2 Grundlagen... 2 2. Mathematische Grundlagen... 2 2.2 Bewegungsgleichungen... 2 2.3
Synthese Linearer Regelungen - Formelsammlung von 8 SYNTHESE LINEARER REGELUNGEN FORMELSAMMLUNG UND MERKZETTEL INHALT 2 Grundlagen... 2 2. Mathematische Grundlagen... 2 2.2 Bewegungsgleichungen... 2 2.3
Auslegung aktiv gedämpfter Systeme
 Dynamiksimulation in der Fahrzeugentwicklung Auslegung aktiv gedämpfter Systeme Reinhard Helfrich INTES GmbH, Stuttgart www.intes.de 1 INTES die PERMAS-Macher 2 PERMAS Vibroakustik: Dynamische Analyse
Dynamiksimulation in der Fahrzeugentwicklung Auslegung aktiv gedämpfter Systeme Reinhard Helfrich INTES GmbH, Stuttgart www.intes.de 1 INTES die PERMAS-Macher 2 PERMAS Vibroakustik: Dynamische Analyse
Auslegung einer Transversalfluss-Reluktanzmaschine
 Auslegung einer Transversalfluss-Reluktanzmaschine Dipl.-Ing. Roman Hirsch, Prof. Dr.-Ing. Bernd Orlik, Dr.-Ing. Marek Siatkowski Universität Bremen, Institut für elektrische Antriebe, Leistungselektronik
Auslegung einer Transversalfluss-Reluktanzmaschine Dipl.-Ing. Roman Hirsch, Prof. Dr.-Ing. Bernd Orlik, Dr.-Ing. Marek Siatkowski Universität Bremen, Institut für elektrische Antriebe, Leistungselektronik
Regelungstechnik : Vorlesung 10
 Regelungstechnik : Vorlesung 10 Umgang mit Beschränkungen der Aktoren Alle Aktoren haben gewisse Beschränkungen. Sie sind beispielsweise in ihrer Amplitude oder Dynamik beschränkt. Das Missachten von Stellgrößenbegrenzung
Regelungstechnik : Vorlesung 10 Umgang mit Beschränkungen der Aktoren Alle Aktoren haben gewisse Beschränkungen. Sie sind beispielsweise in ihrer Amplitude oder Dynamik beschränkt. Das Missachten von Stellgrößenbegrenzung
Regelungstechnik für Ingenieure
 Regelungstechnik für Ingenieure Analyse, Simulation und Entwurf von Regelkreisen Bearbeitet von Serge Zacher, Manfred Reuter 15., korrigierte Auflage 2017. Buch. XVIII, 515 S. Softcover ISBN 978 3 658
Regelungstechnik für Ingenieure Analyse, Simulation und Entwurf von Regelkreisen Bearbeitet von Serge Zacher, Manfred Reuter 15., korrigierte Auflage 2017. Buch. XVIII, 515 S. Softcover ISBN 978 3 658

Grundlagen der Regelungstechnik Theorie, elektronische Regelungen, digitale Regeleinrichtungen, Fuzzy-Regelung
 Karl-Heinz Reuther Grundlagen der Regelungstechnik Theorie, elektronische Regelungen, digitale Regeleinrichtungen, Fuzzy-Regelung Berichte aus der Steuerungs- und Regelungstechnik Karl-Heinz Reuther Grundlagen
Karl-Heinz Reuther Grundlagen der Regelungstechnik Theorie, elektronische Regelungen, digitale Regeleinrichtungen, Fuzzy-Regelung Berichte aus der Steuerungs- und Regelungstechnik Karl-Heinz Reuther Grundlagen
Entwurf elektrischer Maschinen mit numerischer Feldberechnung
 Entwurf elektrischer Maschinen mit numerischer Feldberechnung Erich Schmidt Institut für Elektrische Antriebe und Maschinen Technische Universität Wien Wien, Österreich Inhalt Einleitung Finite Elemente
Entwurf elektrischer Maschinen mit numerischer Feldberechnung Erich Schmidt Institut für Elektrische Antriebe und Maschinen Technische Universität Wien Wien, Österreich Inhalt Einleitung Finite Elemente
Modellbasierte prädiktive Regelung
 Modellbasierte prädiktive Regelung Eine Einführung für Ingenieure von Rainer Dittmar und Bernd-Markus Pfeiffer Oldenbourg Verlag München Wien 1 Einführung 1 1.1 Entwicklung der Prozessführung im gegenwärtigen
Modellbasierte prädiktive Regelung Eine Einführung für Ingenieure von Rainer Dittmar und Bernd-Markus Pfeiffer Oldenbourg Verlag München Wien 1 Einführung 1 1.1 Entwicklung der Prozessführung im gegenwärtigen
Methoden der Regelungstechnik
 FELJC Methoden_der_Regelungstechnik_3.odt 1 Methoden der Regelungstechnik 5) Störgrößenaufschaltung a) Allgemeines Die Störgrößenaufschaltung ist eine Kombination aus Steuerung und Regelung. Zur Erinnerung:
FELJC Methoden_der_Regelungstechnik_3.odt 1 Methoden der Regelungstechnik 5) Störgrößenaufschaltung a) Allgemeines Die Störgrößenaufschaltung ist eine Kombination aus Steuerung und Regelung. Zur Erinnerung:
Fachpraktikum Hochdynamische Antriebssysteme. Theoretische Grundlagen Gleichstrommaschine
 Fachpraktikum Hochdynamische ntriebssysteme Gleichstrommaschine Christof Zwyssig Franz Zürcher Philipp Karutz HS 2008 Gleichstrommaschine Die hier aufgeführten theoretischen Betrachtungen dienen dem Grundverständnis
Fachpraktikum Hochdynamische ntriebssysteme Gleichstrommaschine Christof Zwyssig Franz Zürcher Philipp Karutz HS 2008 Gleichstrommaschine Die hier aufgeführten theoretischen Betrachtungen dienen dem Grundverständnis
Regelungstechnik 1. Oldenbourg Verlag München Wien
 Regelungstechnik 1 Lineare und Nichtlineare Regelung, Rechnergestützter Reglerentwurf von Prof. Dr. Gerd Schulz 3., überarbeitete und erweiterte Auflage Oldenbourg Verlag München Wien Inhaltsverzeichnis
Regelungstechnik 1 Lineare und Nichtlineare Regelung, Rechnergestützter Reglerentwurf von Prof. Dr. Gerd Schulz 3., überarbeitete und erweiterte Auflage Oldenbourg Verlag München Wien Inhaltsverzeichnis
Optimierung von Regelkreisen. mit P-, PI und PID Reglern
 mit P-, PI und PID Reglern Sollwert + - Regler System Istwert Infos: Skript Regelungstechnisches Praktikum (Versuch 2) + Literatur Seite 1 Ziegler und Nichols Strecke: Annäherung durch Totzeit- und PT1-Glied
mit P-, PI und PID Reglern Sollwert + - Regler System Istwert Infos: Skript Regelungstechnisches Praktikum (Versuch 2) + Literatur Seite 1 Ziegler und Nichols Strecke: Annäherung durch Totzeit- und PT1-Glied
Einsatz von Simulationswerkzeugen beim Entwurf feinwerktechnischer Systeme. Beispiele aus der Forschung am IFTE
 Fakultät Elektrotechnik, Institut für Feinwerktechnik und Elektronik-Design Einsatz von Simulationswerkzeugen beim Entwurf feinwerktechnischer Systeme Beispiele aus der Forschung am IFTE Dr.-Ing. J. Gaßmann
Fakultät Elektrotechnik, Institut für Feinwerktechnik und Elektronik-Design Einsatz von Simulationswerkzeugen beim Entwurf feinwerktechnischer Systeme Beispiele aus der Forschung am IFTE Dr.-Ing. J. Gaßmann
Gebäudeautomation. Mess-, Steuer- und Regelungstechnik in der Gebäudeautomation
 Gebäudeautomation Kurstermin 27.04.2018 Kursort Stuttgart Mess-, Steuer- und Regelungstechnik in der Gebäudeautomation (Kurs-Nr.: 65 20 814) Das Seminar beschäftigt sich mit den Grundlagen der Regelungstechnik
Gebäudeautomation Kurstermin 27.04.2018 Kursort Stuttgart Mess-, Steuer- und Regelungstechnik in der Gebäudeautomation (Kurs-Nr.: 65 20 814) Das Seminar beschäftigt sich mit den Grundlagen der Regelungstechnik
LÜFTERSTEUERUNG TUNNEL ST. RUPRECHT
 LÜFTERSTEUERUNG TUNNEL ST. RUPRECHT Stefan Weiss Fachbereich Tunnelmanagement ASFINAG Service GmbH Mondsee, 09. November 2016 Inhalt Auslegung Tunnel St. Ruprecht Brandversuch Tunnel St. Ruprecht GV 2015
LÜFTERSTEUERUNG TUNNEL ST. RUPRECHT Stefan Weiss Fachbereich Tunnelmanagement ASFINAG Service GmbH Mondsee, 09. November 2016 Inhalt Auslegung Tunnel St. Ruprecht Brandversuch Tunnel St. Ruprecht GV 2015
Ableitung thermischer Randbedingungen für lineare Antriebseinheiten
 Ableitung thermischer Randbedingungen für lineare Antriebseinheiten Dipl.-Ing. Matthias Ulmer, Prof. Dr.-Ing. Wolfgang Schinköthe Universität Stuttgart, Institut für Konstruktion und Fertigung in der Feinwerktechnik
Ableitung thermischer Randbedingungen für lineare Antriebseinheiten Dipl.-Ing. Matthias Ulmer, Prof. Dr.-Ing. Wolfgang Schinköthe Universität Stuttgart, Institut für Konstruktion und Fertigung in der Feinwerktechnik
Verlustanalyse im elektrischen Antrieb von Brennstoffzellenfahrzeugen bei variierender Zwischenkreisspannung
 Verlustanalyse im elektrischen Antrieb von Brennstoffzellenfahrzeugen bei variierender Zwischenkreisspannung Dipl.-Ing. Anna-Lena Menn ASIM, Hochschule Ulm, 09.-10.03.2017 Motivation www.toyota.de Brennstoffzellenfahrzeuge
Verlustanalyse im elektrischen Antrieb von Brennstoffzellenfahrzeugen bei variierender Zwischenkreisspannung Dipl.-Ing. Anna-Lena Menn ASIM, Hochschule Ulm, 09.-10.03.2017 Motivation www.toyota.de Brennstoffzellenfahrzeuge
INSTITUT FÜR REGELUNGSTECHNIK
 Lösung Übung 3 Aufgabe: Kaskadenregelung a Berechnung der Teilübertragungsfunktion G 3 s: V4 G 3 s Y 3s Xs T 4 s + + V 5 V 3 T 5 s + T 3 s + V4 T 5 s + T 4 s + V 5 V 3 T 4 s +T 5 s + T 3 s + V 3 [V 4 T
Lösung Übung 3 Aufgabe: Kaskadenregelung a Berechnung der Teilübertragungsfunktion G 3 s: V4 G 3 s Y 3s Xs T 4 s + + V 5 V 3 T 5 s + T 3 s + V4 T 5 s + T 4 s + V 5 V 3 T 4 s +T 5 s + T 3 s + V 3 [V 4 T
A. Modellierung des Zwei-Massen-Systems (ZMS)
") Bewegungssteuerung durch geregelte elektrische Antriebe Übung 4 (WS7/8) Alle Abbildungen und Übungsunterlagen (Einführungsfolien, Übungsblätter, Musterlösungen, MATLAB-Übungen/Lösungen und Formelsammlung)
Bewegungssteuerung durch geregelte elektrische Antriebe Übung 4 (WS7/8) Alle Abbildungen und Übungsunterlagen (Einführungsfolien, Übungsblätter, Musterlösungen, MATLAB-Übungen/Lösungen und Formelsammlung)
Numerische Vorhersage der Schallemission von beispielhaften elektrischen Stellantrieben im Fahrzeug
 Simcenter Symposium zur Fahrzeugentwicklung, 17. /18. Oktober 2017, Ludwigsburg www.novicos.de Numerische Vorhersage der Schallemission von beispielhaften elektrischen Stellantrieben im Fahrzeug Prof.
Simcenter Symposium zur Fahrzeugentwicklung, 17. /18. Oktober 2017, Ludwigsburg www.novicos.de Numerische Vorhersage der Schallemission von beispielhaften elektrischen Stellantrieben im Fahrzeug Prof.
Echtzeitmodellierung und Simulation von Elektrofahrzeugen
 Echtzeitmodellierung und Simulation von Elektrofahrzeugen Aufbau eines Demonstrators mit NI VeriStand und SimulationX zur Abbildung eines elektrisch betriebenen Allrad-Buggy Torsten Blochwitz, Jens Schindler
Echtzeitmodellierung und Simulation von Elektrofahrzeugen Aufbau eines Demonstrators mit NI VeriStand und SimulationX zur Abbildung eines elektrisch betriebenen Allrad-Buggy Torsten Blochwitz, Jens Schindler
Aktive Struktur-Akustik-Regelung (ASAC) S. Algermissen, M. Misol, O. Unruh
 S. Algermissen, M. Misol, O. Unruh") Adaptronik Dr.-Ing. H. P. Monner Dr.-Ing. J. Riemenschneider 15.02.2011 von 09:00 Uhr 17:00 Uhr Golden Tulip Hamburg Abschlussworkshop CFK-Rumpf NG Aktive Struktur-Akustik-Regelung (ASAC) S. Algermissen,
Adaptronik Dr.-Ing. H. P. Monner Dr.-Ing. J. Riemenschneider 15.02.2011 von 09:00 Uhr 17:00 Uhr Golden Tulip Hamburg Abschlussworkshop CFK-Rumpf NG Aktive Struktur-Akustik-Regelung (ASAC) S. Algermissen,
Regelungstechnik. Prof. Dr. phil. nat. Herbert Schlitt. Physikalisch orientierte Darstellung fachübergreifender Prinzipien
 Prof. Dr. phil. nat. Herbert Schlitt Regelungstechnik Physikalisch orientierte Darstellung fachübergreifender Prinzipien Modellbildung Analoge und digitale Regelung Nichttechnische Regelung Zustandsregelung
Prof. Dr. phil. nat. Herbert Schlitt Regelungstechnik Physikalisch orientierte Darstellung fachübergreifender Prinzipien Modellbildung Analoge und digitale Regelung Nichttechnische Regelung Zustandsregelung
Regelung einer Luft-Temperatur-Regelstrecke
 Technische Universität Berlin Fakultät IV Elektrotechnik und Informatik Fachgebiet Regelungssysteme Leitung: Prof. Dr.-Ing. Jörg Raisch Praktikum Grundlagen der Regelungstechnik Regelung einer Luft-Temperatur-Regelstrecke
Technische Universität Berlin Fakultät IV Elektrotechnik und Informatik Fachgebiet Regelungssysteme Leitung: Prof. Dr.-Ing. Jörg Raisch Praktikum Grundlagen der Regelungstechnik Regelung einer Luft-Temperatur-Regelstrecke
Automatisierungstechnik 1
 Automatisierungstechnik Hinweise zum Laborversuch Motor-Generator. Modellierung U a R Last Gleichstrommotor Gleichstromgenerator R L R L M M G G I U a U em = U eg = U G R Last Abbildung : Motor-Generator
Automatisierungstechnik Hinweise zum Laborversuch Motor-Generator. Modellierung U a R Last Gleichstrommotor Gleichstromgenerator R L R L M M G G I U a U em = U eg = U G R Last Abbildung : Motor-Generator
ALxxxx Linear Servomotoren
 ALxxxx Linear Servomotoren u www.beckhoff.de/linearmotoren Primärteil: Spulenteil 386 Sekundärteil: Magnetplatte (vergossen) AL20xx Eisenbehaftet, Magnetbahnbreite 80 mm AL24xx Eisenbehaftet, Magnetbahnbreite
ALxxxx Linear Servomotoren u www.beckhoff.de/linearmotoren Primärteil: Spulenteil 386 Sekundärteil: Magnetplatte (vergossen) AL20xx Eisenbehaftet, Magnetbahnbreite 80 mm AL24xx Eisenbehaftet, Magnetbahnbreite
Grundlagen der Regelungstechnik
 Grundlagen der Regelungstechnik Dr.-Ing. Georg von Wichert Siemens AG, Corporate Technology, München Termine Nächste Termine: 28.., 4.2. Wiederholung vom letzten Mal Regelkreis Geschlossener Regelkreis
Grundlagen der Regelungstechnik Dr.-Ing. Georg von Wichert Siemens AG, Corporate Technology, München Termine Nächste Termine: 28.., 4.2. Wiederholung vom letzten Mal Regelkreis Geschlossener Regelkreis
Regelungstechnik. Prof. Dr. phil. nat. Herbert Schlitt. Physikalisch orientierte Darstellung fachübergreifender Prinzipien
 Prof. Dr. phil. nat. Herbert Schlitt Regelungstechnik Physikalisch orientierte Darstellung fachübergreifender Prinzipien Modellbildung Analoge und digitale Regelung Nichttechnische Regelungen Zustandsregelung
Prof. Dr. phil. nat. Herbert Schlitt Regelungstechnik Physikalisch orientierte Darstellung fachübergreifender Prinzipien Modellbildung Analoge und digitale Regelung Nichttechnische Regelungen Zustandsregelung
Institut für Elektrotechnik und Informationstechnik. Aufgabensammlung zur. Regelungstechnik B. Prof. Dr. techn. F. Gausch Dipl.-Ing. C.
 Institut für Elektrotechnik und Informationstechnik Aufgabensammlung zur Regelungstechnik B Prof. Dr. techn. F. Gausch Dipl.-Ing. C. Balewski 10.03.2011 Übungsaufgaben zur Regelungstechnik B Aufgabe 0
Institut für Elektrotechnik und Informationstechnik Aufgabensammlung zur Regelungstechnik B Prof. Dr. techn. F. Gausch Dipl.-Ing. C. Balewski 10.03.2011 Übungsaufgaben zur Regelungstechnik B Aufgabe 0
Einstieg in die Regelungstechnik
 Einstieg in die Regelungstechnik Hans-Werner Philippsen Vorgehensmodell für den praktischen Reglerentwurf ISBN 3-446-22377-0 Inhaltsverzeichnis Weitere Informationen oder Bestellungen unter http://www.hanser.de/3-446-22377-0
Einstieg in die Regelungstechnik Hans-Werner Philippsen Vorgehensmodell für den praktischen Reglerentwurf ISBN 3-446-22377-0 Inhaltsverzeichnis Weitere Informationen oder Bestellungen unter http://www.hanser.de/3-446-22377-0
Regelung eines inversen Pendels
 Regelung eines inversen Pendels Dr.-Ing. Michael Buchholz 29.10.2010 Institut für Mess-, Regel- und Mikrotechnik NI Dozenten- und Ausbildertag 2010 Fürstenfeldbruck Seite 2 Anwendungsgebiete in der Forschung
Regelung eines inversen Pendels Dr.-Ing. Michael Buchholz 29.10.2010 Institut für Mess-, Regel- und Mikrotechnik NI Dozenten- und Ausbildertag 2010 Fürstenfeldbruck Seite 2 Anwendungsgebiete in der Forschung
Herbert Bernstein. Regelungstechnik. Theorie und Praxis. mit WinFACT und Multisim. Elektor-Verlag, Aachen
 Herbert Bernstein Regelungstechnik Theorie und Praxis mit WinFACT und Multisim Elektor-Verlag, Aachen Inhaltsverzeichnis Vorwort 7 1 Einführung in die Regelungstechnik 9 11 Lösung Regelungsaufgaben von
Herbert Bernstein Regelungstechnik Theorie und Praxis mit WinFACT und Multisim Elektor-Verlag, Aachen Inhaltsverzeichnis Vorwort 7 1 Einführung in die Regelungstechnik 9 11 Lösung Regelungsaufgaben von
Advanced Motion Control Techniques. Dipl. Ing. Jan Braun maxon motor ag Switzerland
 Advanced Motion Control Techniques Dipl. Ing. Jan Braun maxon motor ag Switzerland Agenda Schematiascher Aufbau Positionsregelkreis Übersicht Motion Control Systeme PC based mit CANopen für DC und EC Motoren
Advanced Motion Control Techniques Dipl. Ing. Jan Braun maxon motor ag Switzerland Agenda Schematiascher Aufbau Positionsregelkreis Übersicht Motion Control Systeme PC based mit CANopen für DC und EC Motoren
Einstieg in die Regelungstechnik
 Hans-Werner Philippsen Einstieg in die Regelungstechnik Vorgehensmodell für den praktischen Reglerentwurf mit 263 Bildern und 17 Tabellen Fachbuchverlag Leipzig im Carl Hanser Verlag 1 Einführung 13 1.1
Hans-Werner Philippsen Einstieg in die Regelungstechnik Vorgehensmodell für den praktischen Reglerentwurf mit 263 Bildern und 17 Tabellen Fachbuchverlag Leipzig im Carl Hanser Verlag 1 Einführung 13 1.1
Einführung in die Regelungstechnik
 Heinz Mann t Horst Schiffeigen t Rainer Froriep Einführung in die Regelungstechnik Analoge und digitale Regelung, Fuzzy-Regler, Regler-Realisierung, Software 10., neu bearbeitete Auflage mit 379 Bildern
Heinz Mann t Horst Schiffeigen t Rainer Froriep Einführung in die Regelungstechnik Analoge und digitale Regelung, Fuzzy-Regler, Regler-Realisierung, Software 10., neu bearbeitete Auflage mit 379 Bildern
- Einfluss der Regelung auf das dynamische Verhalten -
 Statisches und dynamisches Verhalten eines fünfachsigen Bearbeitungszentrums - Einfluss der Regelung auf das dynamische Verhalten - Dr.-Ing. Rouven Meidlinger planlauf GmbH Einleitung, Aufgabenstellung
Statisches und dynamisches Verhalten eines fünfachsigen Bearbeitungszentrums - Einfluss der Regelung auf das dynamische Verhalten - Dr.-Ing. Rouven Meidlinger planlauf GmbH Einleitung, Aufgabenstellung
Maschinenelemente-Skript Block A
 TUD-MB ME I / Block A Die neue Maschinenelemente- Lehre Prof.Dr.-Ing.H.Birkhofer Prof. Dr.-Ing. R. Nordmann Maschinenelemente-Skript Block A Fertigungstechnik Automobiltechnik Feinwerktechnik Aktoren Energiespeicher
TUD-MB ME I / Block A Die neue Maschinenelemente- Lehre Prof.Dr.-Ing.H.Birkhofer Prof. Dr.-Ing. R. Nordmann Maschinenelemente-Skript Block A Fertigungstechnik Automobiltechnik Feinwerktechnik Aktoren Energiespeicher
Kai Michels Frank Klawonn Rudolf Kruse Andreas Nürnberger. Fuzzy-Regelung. Grundlagen, Entwurf, Analyse. Mit 174 Abbildungen und 9 Tabellen.
 Kai Michels Frank Klawonn Rudolf Kruse Andreas Nürnberger Fuzzy-Regelung Grundlagen, Entwurf, Analyse Mit 174 Abbildungen und 9 Tabellen Springer Inhaltsverzeichnis 1. Grundlagen der Fuzzy-Systeme 1 1.1
Kai Michels Frank Klawonn Rudolf Kruse Andreas Nürnberger Fuzzy-Regelung Grundlagen, Entwurf, Analyse Mit 174 Abbildungen und 9 Tabellen Springer Inhaltsverzeichnis 1. Grundlagen der Fuzzy-Systeme 1 1.1
Regelungstechnik 1. Systemtheoretische Grundlagen, Analyse und Entwurf einschleifiger Regelungen
 2008 AGI-Information Management Consultants May be used for personal purporses only or by libraries associated to dandelon.com network. Jan Lunze Regelungstechnik 1 Systemtheoretische Grundlagen, Analyse
2008 AGI-Information Management Consultants May be used for personal purporses only or by libraries associated to dandelon.com network. Jan Lunze Regelungstechnik 1 Systemtheoretische Grundlagen, Analyse
Simulation des Windenstarts Seitenbewegung und Bodenmodell. Andreas Gäb, Jan Nowack, Wolfgang Alles
 Simulation des Windenstarts Seitenbewegung und Bodenmodell Andreas Gäb, Jan Nowack, Wolfgang Alles Inhalt Beschreibung der Simulationsumgebung Erweiterungen Pilotenmodell für die Seitenbewegung Boden,
Simulation des Windenstarts Seitenbewegung und Bodenmodell Andreas Gäb, Jan Nowack, Wolfgang Alles Inhalt Beschreibung der Simulationsumgebung Erweiterungen Pilotenmodell für die Seitenbewegung Boden,
Mechatronik Grundlagen
 Prüfung WS 2009/2010 Mechatronik Grundlagen Prof. Dr.-Ing. K. Wöllhaf Anmerkungen: Aufgabenblätter auf Vollständigkeit überprüfen Nur Blätter mit lesbarem Namen werden korrigiert. Keine rote Farbe verwenden.
Prüfung WS 2009/2010 Mechatronik Grundlagen Prof. Dr.-Ing. K. Wöllhaf Anmerkungen: Aufgabenblätter auf Vollständigkeit überprüfen Nur Blätter mit lesbarem Namen werden korrigiert. Keine rote Farbe verwenden.
SIMULINK. Regelkreise
 SIMULINK Regelkreise Dipl.-Ing. U. Wohlfarth Inhalt Modellierung einer Regelstrecke in Simulink Analyse der Streckeneigenschaften in Matlab Berechnung von Reglerkoeffizienten in Matlab Auslegung eines
SIMULINK Regelkreise Dipl.-Ing. U. Wohlfarth Inhalt Modellierung einer Regelstrecke in Simulink Analyse der Streckeneigenschaften in Matlab Berechnung von Reglerkoeffizienten in Matlab Auslegung eines
Inhaltsverzeichnis. Birgit Steffenhagen. Kleine Formelsammlung Regelungstechnik ISBN: Weitere Informationen oder Bestellungen unter
 Inhaltsverzeichnis Birgit Steffenhagen Kleine Formelsammlung Regelungstechnik ISBN: 978-3-446-41467-9 Weitere Informationen oder Bestellungen unter http://www.hanser.de/978-3-446-41467-9 sowie im Buchhandel.
Inhaltsverzeichnis Birgit Steffenhagen Kleine Formelsammlung Regelungstechnik ISBN: 978-3-446-41467-9 Weitere Informationen oder Bestellungen unter http://www.hanser.de/978-3-446-41467-9 sowie im Buchhandel.
Lehr- und Forschungsprojekt Balancer
 Lehr- und Forschungsprojekt Balancer Prof. Dr.-Ing. Tobias Flämig-Vetter Email: tobias.flaemig@dhbw-stuttgart.de Tel: +49 711 1849 636 http://wwwlehre.dhbw-stuttgart.de/~flaemig/studienarbeiten/balancer/
Lehr- und Forschungsprojekt Balancer Prof. Dr.-Ing. Tobias Flämig-Vetter Email: tobias.flaemig@dhbw-stuttgart.de Tel: +49 711 1849 636 http://wwwlehre.dhbw-stuttgart.de/~flaemig/studienarbeiten/balancer/
Kolonnenregelung Praxisbeispiele und APC
 24. Lunch & Learn 21.02.2014 Kolonnenregelung Praxisbeispiele und APC siemens.com/answers Einleitung 2 Advanced Process Control (APC) 5 Tipps und Tricks 17 Seite 2 Prozessregelungsmethoden Seite 3 Manuelle
24. Lunch & Learn 21.02.2014 Kolonnenregelung Praxisbeispiele und APC siemens.com/answers Einleitung 2 Advanced Process Control (APC) 5 Tipps und Tricks 17 Seite 2 Prozessregelungsmethoden Seite 3 Manuelle
Physikalisch-Technische Bundesanstalt
 Physikalisch-Technische Bundesanstalt Mechanik und Akustik PTB-MA-77 Braunschweig, Januar 2006 Oliver Mack Verhalten piezoelektrischer Kraftaufnehmer unter Wirkung mechanischer Einflussgrößen Von der Fakultät
Physikalisch-Technische Bundesanstalt Mechanik und Akustik PTB-MA-77 Braunschweig, Januar 2006 Oliver Mack Verhalten piezoelektrischer Kraftaufnehmer unter Wirkung mechanischer Einflussgrößen Von der Fakultät
Grundriss der praktischen Regelungstechnik
 Erwin Samal Grundriss der praktischen Regelungstechnik bearbeitet von Dirk Fabian und Christian Spieker DE GRUYTER OLDENBOURG Inhaltsverzeichnis Vorwort V Teil I. Grundlagen der Regelungstechnik 1 1 Grundbegriffe
Erwin Samal Grundriss der praktischen Regelungstechnik bearbeitet von Dirk Fabian und Christian Spieker DE GRUYTER OLDENBOURG Inhaltsverzeichnis Vorwort V Teil I. Grundlagen der Regelungstechnik 1 1 Grundbegriffe
Bewegungssteuerung durch geregelte elektrische Antriebe Übung & Praktikum
 Bewegungssteuerung durch geregelte elektrische Antriebe Übung & Praktikum Thomas Huber Lehrstuhl für Elektrische Antriebssysteme und Leistungselektronik 1. Übung (09.11.2017) thomas.huber-haw-landshut@tum.de
Bewegungssteuerung durch geregelte elektrische Antriebe Übung & Praktikum Thomas Huber Lehrstuhl für Elektrische Antriebssysteme und Leistungselektronik 1. Übung (09.11.2017) thomas.huber-haw-landshut@tum.de
Analyse der Parameter beim CO 2 -Strahlen
 Analyse der Parameter beim CO 2 -Strahlen Anke Opitz Gliederung Ausgangssituation Zielsetzung Vorgehensweise Ergebnisse Zusammenfassung Ausblick Ausgangssituation Prozessparameter Ausgangssituation Pelletparameter
Analyse der Parameter beim CO 2 -Strahlen Anke Opitz Gliederung Ausgangssituation Zielsetzung Vorgehensweise Ergebnisse Zusammenfassung Ausblick Ausgangssituation Prozessparameter Ausgangssituation Pelletparameter
Kompensation nichtlinearer Systemeigenschaften eines
 Kompensation nichtlinearer Systemeigenschaften eines EPS-Prüfstandes unter LabVIEW Beitrag von ITK Engineering AG zum National Instruments VIP-Kongress 2011 in der Reihe Prüfstandsautomatisierung Referent:
Kompensation nichtlinearer Systemeigenschaften eines EPS-Prüfstandes unter LabVIEW Beitrag von ITK Engineering AG zum National Instruments VIP-Kongress 2011 in der Reihe Prüfstandsautomatisierung Referent: