Situations- und Gefahrenerkennung in Verkehrsszenen
|
|
|
- Lukas Hofer
- vor 6 Jahren
- Abrufe
Transkript



1 Situations- und Gefahrenerkennung in Verkehrsszenen Marek Junghans Kolloquium Verkehrsmanagement und Verkehrstelematik Dresden, 8. Mai 2013
2 Deutsches Zentrum für Luft- und Raumfahrt e.v. (DLR)

3 Das Deutsche Zentrum für Luft- und Raumfahrt e.v. in der Helmholtz-Gemeinschaft Forschungsbereiche Luftfahrt Raumfahrtforschung und -technologie Energie Verkehr Sicherheit Finanzierung und Fördervolumen 2009: Mio. Euro 2010: Mio. Euro 2011: 2012:

 Stade Hamburg Bremen Trauen Berlin")
4 Standorte und Personal Circa Mitarbeiterinnen und Mitarbeiter arbeiten in 32 Instituten und Einrichtungen in 16 Standorten. Büros in Brüssel, Paris und Washington. Forschungsetat: 796 Mio. ca. 51% Bund (BMWi, BMVg), Länder ca. 49% Drittmittel (Projektträger, eigene Erträge, Projektförderungen) Stade Hamburg Bremen Trauen Berlin Braunschweig Göttingen Jülich Köln Bonn Lampoldshausen Neustrelitz Stuttgart Augsburg Oberpfaffenhofen Weilheim



5 Institut für Verkehrssystemtechnik Sitz: Seit: 2001 Leitung: Braunschweig, Berlin Prof. Dr.-Ing. Karsten Lemmer Mitarbeiter: Momentan rund 135 Mitarbeiter aus verschiedenen wissenschaftlichen Bereichen Forschungsgebiete: Automotive Bahnsysteme Verkehrsmanagement Aufgabenspektrum: Grundlagenforschung Erstellen von Konzepten und Strategien Prototypische Entwicklungen Qualität: zertifiziert nach DIN EN ISO 9001 und VDA 6.2 sowie RailSiTe gemäß ISO 17025


6 Forschungsaktivitäten Automotive Bahnsysteme Verkehrsmanagement Methoden / Bewertung Fahrer verstehen Human Factors Engineering & Design Technik FAS Fahrzeuge Simulatoren Zukunftsfähiger Bahnbetrieb Life Cycle Management Sicherheit und Zulassung Rail Human Factors Test und Validierung Sensoren Daten - Algorithmen Verkehrsdatenerfassung Verkehrsdatenmanagement Simulation und Prognose Verkehrssteuerung und Verkehrsbeeinflussung Qualität im Verkehr
7 Folie 10 > Institutsevaluation 2012 > Autor Dokumentname > Automotive



 Automation Testfelder:")
8 Forschungsschwerpunkte im Bereich Automotive Human Factors Unfallanalysen / NDS Probandenstudien Schlüsselfaktoren für Fahrer/Systemverhalten Mess- und Analysemethoden Fahrermodellierung Konzepte und Technologien Basistechnologien für Assistenz / Automation Architekturen Kommunikation Ortung / Navigation Ergonomie / Design Funktionsentwicklung Simulatoren und Fahrzeuge Statische und dynamische Simulatoren Forschungsfahrzeuge passiv / aktiv (Hoch-) Automation Testfelder: Anwendungsplattform intelligente Mobilität (AIM)




9 Forschungsinfrastruktur Bereich Automotive HMI-Lab Virtual Reality Labor Dynamischer Fahrsimulator idee-lab - Interaktives Design und Ergonomie
10 Folie 15 > Institutsevaluation 2012 > Autor Dokumentname > Bahnsysteme






11 Forschungsschwerpunkte im Bereich Bahnsysteme Sensoren- Daten - Algorithmen Life Cycle Management Test und Validierung Safety Rail Human Factors Nachhaltige Lösung der aktuell anstehenden Fragestellungen Basis: aktuelle technologische Trends wissenschaftliche Methoden interdisziplinäres Vorgehen bahnbetriebliches Grundverständnis Bahnbetrieb





12 Forschungsinfrastruktur Bereich Bahnsysteme RailSiTe Rail Simulation and Testing RailDriVE Rail Driving Validation Environment
13 Folie 18 > Institutsevaluation 2012 > Autor Dokumentname > Verkehrsmanagement

14 Unsere Vision Vom Verkehrsmanagement zu einem effizienten, sicheren und umweltfreundlichen Mobilitätsmanagement
15 Folie 21 > Institutsevaluation 2012 > Autor Dokumentname > Verkehrsmanagement Wissenschaftliche Ausrichtung Vom Verkehrszum Mobilitätsmanagement Verkehrsdatenerfassung intermodal kooperativ in Megacities Verkehrs- Steuerung/ -beeinflussung Qualität im Verkehr Verkehrsdatenmanagement umweltorientiert elektrifiziert grenzenlos innovativ bei Katastrophen in Städten und Regionen Simulation und Prognose international sicher bei Großereignissen mit einem geschlossenen Wirkungskreis









16 Forschungsinfrastruktur Bereich Verkehrsmanagement Das Messfahrzeug UTRaCar Automatische Automatische Verkehrserfassung Automatische Front-/Heckkamera Verkehrserfassung Radar-Rundumsicht Stereo-Laser-System Sensoreinschub Massendatenspeicher Radar Stereo-Laser-Daten Arbeitsplatz







17 Forschungsinfrastruktur Bereich Verkehrsmanagement Das Messfahrzeug MoMoCar Arbeitsplatz Mobiles Labor DGPS Basisstation Schallpegelmessung Werkbank Werkbank Massendatenspeicher -DGPS DGPS Basisstation

- Mess-")






18 Urban Traffic Research Laboratory (UTRaLab)- Mess- und Versuchstrecke am Ernst-Ruska-Ufer Schilderbrücken für Messund Beobachtungstechnik Laserscanner Doppelinduktionsschleifen Digital- und Analogkameras zur Verkehrsbeobachtung und -messung GESO Temperatursensor





19 Traffic Tower Virtuelle Verkehrsmanagementzentrale Operation Center Verkehrssimulation Verkehrslage und Prognose Verkehrslage und Prognose



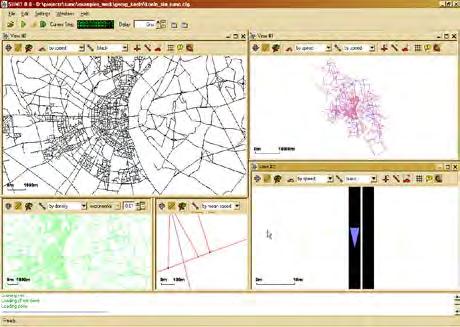
20 SUMO Simulation of Urban MObility Simulation Straßenverkehr Ausgelegt für mikroskopische Simulation großer Szenarien Verkehrslage und Prognose
21 Folie 28 > Institutsevaluation 2012 > Autor Dokumentname > AIM Anwendungsplattform intelligente Mobilität

22 Folie 29 > Institutsevaluation 2012 > Autor Dokumentname > AIM - Eine Stadt als Plattform für anwendungsorientierte Wissenschaft, Forschung und Entwicklung wesentliche Anteile im realen Umfeld einer Stadt und der umliegenden Region spezielle Teststrecken Ein leistungsfähiges Instrumentarium zur Simulation und Beeinflussung von Verkehr/Mobilität.




23 - Kooperationsmodell Etabliertes Zusammenspiel der Partner Stadt Braunschweig Kooperation Industrie Industrie Infrastruktur Fahrzeugtechnik Betrieb Forschungsinfrastruktur im öff. Straßenraum Forschung Universitäten Institute DLR Bürgerinnen / Bürger & Interessensverbände

 Beeinflussung des Verkehrsgeschehens durch kommunikative Vernetzung zwischen Infrastruktur und")
24 Folie 31 > Institutsevaluation 2012 > Autor Dokumentname > Forschungsschwerpunkte in AIM Sensorische Erfassung und Analyse des realen Verkehrsumfelds Konvergenz zwischen Simulation und Realität durch die virtuelle Abbildung makroskopischer Aspekte (Verkehrsfluss) mikroskopischer Aspekte (Fahrsimulationen) Beeinflussung des Verkehrsgeschehens durch kommunikative Vernetzung zwischen Infrastruktur und Verkehrsteilnehmern Einbettung in das städtische Verkehrsmanagement
25 Applikationsplatform Intelligente Mobilität Hauptforschungsbereiche Sicherheit Verringerung der Zahl der schweren und tödlichen Unfälle Erhöhung der Sicherheit der Nutzer von Verkehrsräumen Management von Verkehr bei Großereignissen oder Katastrophen Markteinführung Markteinführung und Migration Mobilitätsbewusstsein AIM Intermodale Mobilität Ressourcenschonung Optimierte Ressourcennutzung Schützen der Umwelt und gewinnen von Lebenszeit Zukünftige Mobilitätskonzepte Verkehrs- Verkehrsfluss A B VM VF
26 AIM Ausbauphase 2013 ITS Road Station in Betrieb Vorbereitung im Rahmen von Projekten

27 Intelligente Kreuzung in UR:BAN Transmission unit
28 Situations- und Gefahrenerkennung in Verkehrsszenen Marek Junghans Kolloquium Verkehrsmanagement und Verkehrstelematik Dresden, 8. Mai 2013
29 Inhalt

30 Inhalt

31 Motivation Beim Linksabbiegen an Ampeln werden jeden Tag 18 Menschen schwer verletzt, jeden zweiten Tag stirbt ein Mensch. Insgesamt starben Menschen, mehr als wurden schwerverletzt. Ziel: Unsere Menschen schützen und die Anzahl der tödlich Verunglückten und Schwerverletzten verringern

32 Motivation Finden der Ursachen für Unfälle (und Beinaheunfälle)



33 Motivation Nutzen Warnung und Assistenz von Verkehrsteilnehmern Identifizierung und Behebung straßenbaulicher und verkehrstechnischer Mängel
34 Inhalt

35 Methoden und Ergebnisse Zusammenfassung Störungen Kameras (u.a.) Verkehrsprozess Objektsegmentierung Zustandsdetektion Tracking & Prognose Fahrzeuge, Radfahrer, Fußgänger, etc. Position, Geschwindigkeit, Beschleunigung Trajektorien


36 Methoden und Ergebnisse Zusammenfassung Unfälle Trajektorienklassifikation & Interaktion Normale, atypische Situationen Verkehrskenngrößen Korrelationsanalyse Potentiell gefährliche Situationen

37 Methoden und Ergebnisse Objekt-Segmentierung - Separation des Hintergrundes vom Vordergrund



38 Methoden und Ergebnisse Objekt Tracking & Prognose - Bewegungsdetektion durch Hintergrundschätzer, Optischen Fluss, Lucas-Kanade - Tracking mit Erweitertem KF, Partikelfilter,

39 Methoden und Ergebnisse Data samples - Verkehrskenngrößen - Häufigkeiten der Fahrzeughalte - Durchschnittliche Geschwindigkeiten - Fahrzeugzählungen
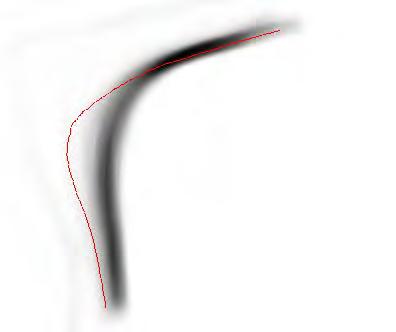


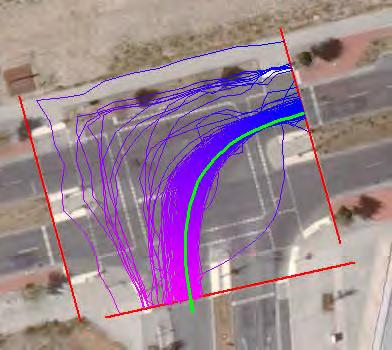
40 Methoden und Ergebnisse Trajektorienklassifikation Vergleich mit Referenztrajektorien - Probability Density Map für Objektposition - Abstand zum perfect track - Startvektor und Kurvigkeit r 1 L, L > 0

41 Methoden und Ergebnisse Trajectorienklassifikation

42 Methoden und Ergebnisse Trajektorieninteraktion Prädiktion und Unteraktion - Kollisionswahrscheinlichkeit für prädizierte Positionen

43 Methoden und Ergebnisse Trajektorieninteraktion
 Kreuzung Rudower Chaussee- Wegedornstraße Durchschnittliche TTC")
44 Methoden und Ergebnisse Ableitung von sicherheitsrelevanten Kenngrößen (Berlin) Kreuzung Rudower Chaussee- Wegedornstraße Durchschnittliche TTC [s]
45 Methoden und Ergebnisse Ableitung von sicherheitsrelevanten Kenngrößen (Hefei, China) Kreuzung Trajektorienzählung
46 Methoden und Ergebnisse Orte mit Häufungen der Beschleunigung zwischen -6 and -3 m/s² y x
 TTC<3: wake up and be prepared Kreuzung")
47 TTC<1: you are almost dead TTC<2: do something immediately Methoden und Ergebnisse Ableitung von sicherheitsrelevanten Kenngrößen (Hefei, China) TTC<3: wake up and be prepared Kreuzung Durchschnittliche TTC [s]
 Kreuzung Durchschnittliche PET")
48 Methoden und Ergebnisse Ableitung von sicherheitsrelevanten Kenngrößen (Hefei, China) Kreuzung Durchschnittliche PET [s]

49 Methoden und Ergebnisse R. Souleyrette and J. Hochstein: Development of a Conflict Analysis Methodology Using SSAM. Center for Transportation Research and Education, Institute for Transportation, Iowa State University. Final Report, August 2012 Ableitung von sicherheitsrelevanten Kenngrößen (Hefei, China) P (TTC) P (PET) - Die TTC- und PET-Häufigkeiten zeigen sehr große Gefahr an - Die schwarze Kurve zeigt, wie es sein müsste (Souleyrette et al. 2012) - Warum?
50 Methoden und Ergebnisse Ableitung von sicherheitsrelevanten Kenngrößen (Hefei, China) - Unterschiedliches Fahrverhalten im Vergleich zu Deutschland - Hauptgrund: fehlerhafte Objektseparation und auftretende Objektkonvergenzen bei der Segmentierung - Favorisierte Lösungsansätze - Fixierung des Hintergrundschätzers nach der Objektdetektion und Wegwerfen fehlerhafter Trajektorien - Berücksichtigung von Bewegungsfronten zwischen unterschiedlichen Objekten durch Berechnung des Optischen Flusses - Modellbasierte Ansätze










51 Methoden und Ergebnisse Ableitung von sicherheitsrelevanten Kenngrößen Objektseparation Objektseparation und -konvergenz
52 Inhalt
53 Korrelationsanalyse Ziele und Verfahren Ziele - Finden und Entwicklung von (probabilistischen) Übergangsmodellen, die den Verkehrssicherheit in Abhängigkeit von Verkehrsdaten und kritischen Situationen quantifizieren - Finden des funktionalen Zusammenhangs zwischen Unfällen und Unfallschwere auf der Grundlage von Unfalldaten (z.b. Kalibrierung) - Nachweiserbringung der (bedingten) Korrelation zwischen Unfällen und Beinaheunfällen Vorgeschlagene Verfahren - Phänomenologische Analyse auf Grundlage von Fahrzeugefolge und entgegenkommenden Fahrzeugen in bezug zu Unfällen - Statistische Methoden - Bayessche Netze (BN)
54 Korrelationsanalyse Phänomenologische Analysen Fahrzeugfolgemodelle - Betrachte zwei Fahrzeuge, Führungsfahrzeug an Position g mit Geschwindigkeit V und das Folgefahrzeug an Position 0 mit v. - Berechnung von TTC- und DRAC-Werten: - TTC = g/(v v) - DRAC = 0.5(V v) 2 /g V TTC<1: you are almost dead TTC<2: do something immediately TTC<3: wake up and be prepared v x g x=0
55 Korrelationsanalyse Statistische Methoden Physikalische Wahrscheinlichkeiten eines Ereignisses X mit der Realisierung x - Zählen wie oft x aufgetreten ist, d.h. c-mal, geteilt durch die Anzahl C der Häufigkeit aller Realisierungen c P x = lim C C - Im Falle von zeitvarianten Ereignissen (was sehr wahrscheinlich ist in der Realität) nehmen wir Quasistationarität an, d.h. die Gleichung wird zu c(t) P x lim C(t) C C(t)
56 Korrelationsanalyse Statistische Methoden Messung der Gefährlichkeit eines Verkehrsraumes durch - Zählung der Anzahl der Unfälle und Berücksichtigung deren Schwere - Ableitung der Häufigkeitsverteilungen von sicherheitsrelevanten Kenngrößen (z.b. TTC, PET, DRAC), um Gefahr eines bestimmten Ortes zu quantifizieren (Komplette Straße, Kreuzung, Kreuzungsarm, etc.) - P(TTC) = f 1 (x, y, t, v, a, Q, V, D, ) - P(DRAC) = f 2 (x, y, t, v, a, Q, V, D, ) - P(PET) = f 3 (x, y, t, v, a, Q, V, D, )
57 Korrelationsanalyse Statistische Methoden Dichteplot von TTT ttc [s] Counts speed v [m/s]
58 Korrelationsanalyse Statistische Methoden Dichteplot von DRAC drac [m/s/s] speed v [m/s] Counts
59 Korrelationsanalyse Statistische Methoden P(DRAC) prob 1e-05 1e-03 1e m/s 30 m/s 40 m/s 50 m/s slope = drac [m/s/s]
60 Korrelationsanalyse Statistische Methoden prob P(TTC) 1e-05 1e-03 1e m/s 30 m/s 45 m/s ttc [s]
61 Korrelationsanalyse Bayessche Netze (BN) BN sind ein graphischer Formalismus zur Verarbeitung von unsicherem Wissen auf Basis von kausalen Zusammenhängen mit Hilfe von Wahrscheinlichkeiten. BN sind gerichtete azyklische Graphen, bestehend aus Knoten und gerichteten Kanten, für deren Verbundwahrscheinlichkeit die (strukturelle) Markov-Eigenschaft gilt. Knoten repräsentieren die Zufallsvariablen und enthalten Informationen über die Wahrscheinlichkeit des Eintretens eines Ereignisses. Gerichtete Kanten repräsentieren kausale Abhängigkeiten zwischen den Knoten. BN stellen eine Verallgemeinerung und Erweiterung des Satzes von Bayes dar. Innerer Knoten Elternknoten = Ursache Kindknoten = Wirkung
62 Korrelationsanalyse Bayessche Netze (BN) Knoten: U={U 1,,U n } = Eltern(X) Y={Y 1,,Y m } = Kinder(X) Realisierungen: X = {x 1,,x N } Markov-Eigenschaft: Y X,U = Y X P(y x,u) = P(y x) Wahrscheinlichkeitstabellen: P(u) P(x u) P(y x) Verbundwahrscheinlichkeit: P(u,x,y) = P(u) P(x u) P(y x)
63 Korrelationsanalyse Bayessche Netze (BN) Inferenz beschreibt den Vorgang, anhand von kausalen und/oder diagnostischen sicheren und/oder unsicheren Evidenzen (Beobachtungen) quantifizierte Schlüsse zum Eintreten von Ereignissen zu ziehen P(x u,y): Rückschlusswahrscheinlichkeit (Bel) P(x u): kausale Unterstützung (π) π λ P(y x): diagnostische Unterstützung (λ) P(y u): Normierungswert (α) Bel(x) = α π(x) λ(x)
64 Korrelationsanalyse Entwicklung eines ersten BNs - Modellentwicklung auf Grundlage von Daten und Verteilungen von - Zeit, Datum, Ort - Verkehrsdaten (Flüsse, Geschwindigkeiten, Abstände, Zeitlücken, ) - Unfalldaten (Typ, Schwere, Sachschaden, ) - Kritische Situationen und Beinaheunfälle - Kinematische und fahrdynamische Kenngrößen (Position, Geschwindigkeit, Beschleunigung, Drehung und -rate, ) - Infrastrukturdaten (Straße, Straßentyp, Spuren, Breite, Zustand, ) - Umweltdaten (Wetter, Beleuchtung, ) - Fahrzeugdaten (Typ, Zustand, ) - Fahrerdaten (Geschlecht, Alter, Zustand, ) - Verkehrssteuerungskenngrößen (Signalisierung, Signalzeiten, ) - Schätzung der funktionalen Zusammenhänge für - Beinaheunfälle und Unfälle - Unfallrate und Unfallschwere Gregoriades, A. and Mouskos, A. C: Black spots identification through a Bayesian Networks quantification of accident risk index. In Transport Research Part C, Volume 28, March 2013, Pages 28 43
65 Korrelationsanalyse Korrelation zwischen Unfällen und Unfallschwere Verkehrszustand Zeit Datum Wetter Straßenkategorie Konflikt Situation Straßenzustand Unfall Art P kk Unfall Schwere P uu uu

66 Korrelationsanalyse Korrelation zwischen Unfällen und Unfallschwere Quelle: EUSKa-Daten der A2, Auffinden von Übergangswahrscheinlichkeiten für die Korrelation von Unfallart und -schwere - Und andere funktionale Zusammenhänge
67 Korrelationsanalyse Korrelation zwischen Unfällen und Unfallschwere P(Unfall_Schwere Unfall_Art) kein_schaden niedriger_schaden mittlerer_schaden schwerer_schaden Kollision durch Beschleunigen Kollision mit Fahrzeug voraus Kollision mit parallelem Fz. Kollision mit entgegenk. Fz. Kollision durch Kreuzen Kollision mit Fußgänger Kollision mit Hindernis Rechts von Straße abkommen Links von Straße abkommen Anderer Unfall
 Autobahnkreuze, -auffahrten Zeitvariante")
68 Korrelationsanalyse Unfälle und ihre lokale und zeitliche Korrelation ( ) Autobahnkreuze, -auffahrten Zeitvariante Einflüsse
69 Korrelationsanalyse Unfälle und ihre lokale und zeitliche Korrelation ( ) Gründe für km 275: - Schlechte Straßenbedingungen und Gefälle/Steigung von 4,0% führte zu Unfällen, insb. bei nassen Straßen - Autobahnteilstück wurde 2008 saniert, sodass die Anzahl der Unfälle sank - Konsequenzen für die statistische Analyse: - Zeitliche Zusammenhänge bereits in wenigen Beispielen sichtbar - Berücksichtigung von kinematischen und fahrdynamischen Kenngrößen
70 Korrelationsanalyse Korrelation zwischen Unfällen und Unfallschwere ESP Aktivität Lenkwinkel und -rate Geschwindigkeit TTC, PET, DRAC Bereits besprochen P uu kk =?? Unfall Art P kk =?? Konflikt Situation Beschleunigung Bremsbeschleunigung P uu kk, uu =?? Unfall Schwere
71 Korrelationsanalyse Lernen von BN als Grundlage einer Verkehrsrisikokarte Umwelt Kinematische und fahrdynamische Kenngrößen P h = Andere Einflüsse P uu kk P kk h i, = h i P uu uu, kk
72 Korrelationsanalyse Lernen von BN als Grundlage einer Verkehrsrisikokarte E H = P cc Initialisierung E H t = P cc t Update (auf Basis von Daten und Zeit) P cc t = ct t C = 1 C c 1,, c n T Zählen der Ereignisse durch Dirichlet-Modell P aa cc, t P aa aa, cc, t Update (auf Basis von Daten, Zeit und updated a-priori-wahrscheinlichkeit)
73 Korrelationsanalyse Auffinden von Übergangsmodellen für die Verkehrsrisikokarte - Liegen die probabilistischen Modelle vor, dann können wir - Gesamtgefährlichkeit, d.h. zeitinvariant, einer Kreuzung, einer Straße oder eines beliebiges Punktes auf einer Straße schätzen - Zeitvariante Gefährlichkeit in Abhängigkeit von umweltbezogenen, verkehrlichen, kinematischen, fahrdynamischen Parametern u.v.a.m. schätzen - Nächste Schritte: - Kenngrößen in kausalen Zusammenhang bringen - Phänomenologischen Ansatz anwenden, um kritische DRACund TTC-Werte (und andere Parameter) zu bekommen - Berechnung der zeitabhängigen (ereignisabhängigen) bedingten Wahrscheinlichkeiten
74 Inhalt
75 Zusammenfassung & Ausblick Schlussfolgerung - Gegenwärtige Methoden zur Messung und Bewertung von Verkehrssicherheit müssen erweitert werden - Sinnvolle Möglichkeiten zur Berechnung von Verkehrskonfliktdaten ergeben sich durch moderne Technologien und Verfahren (z.b. TTC, PET, DRAC, DST, b, v, etc.) - Spatiotemporale Sensorik (e.g. Video, Laser, Radar) - Unfalldaten und Daten von Beinaheunfällen Ausblick - Auffinden von zeit(in)varianten Übergangsmodellen und Nachweis der (bedingten) Korrelation zwischen Unfällen und Beinaheunfällen - Anwendung von BN und statistischen Methoden - Lösen der gegenwärtigen Problem unseres BV-Systems (Verdeckungen, Objektkonvergenzen und separierungen)
76 Zusammenfassung & Ausblick Chancen - Verbesserung der Verkehrssicherheitsforschung und -arbeit - Verbesserung der Verkehrssicherheit, so dass die Anzahl der durch Mängel in der Infrastruktur, Verkehrsbeeinflussung, umweltbedingten Faktoren tödlich Verunglückten und Schwerverletzten u.a. weiter deutlich sinkt - Identifikation und Implementierung von Maßnahmen zur Verbesserung der Verkehrssicherheit in unseren Verkehrsräumen - Neuartige angewandte und getestete Methoden Limits - Wir wissen nicht, ob der Ansatz funktioniert, ab er erscheint sinnvoll und vielversprechend - Wir werden nicht die Situation mit null Toten und null Schwerverletzten, da Unfälle immer noch stochastisch auftreten können

77
Anwendungsplattform Intelligente Mobilität
 Anwendungsplattform Intelligente Mobilität Dipl.-Ing. Markus Pelz Institut für Verkehrssystemtechnik 2. Februar 2011 > Folie 1 Institut für Verkehrssystemtechnik Sitz: Braunschweig, Berlin Seit: 2001 Leitung:
Anwendungsplattform Intelligente Mobilität Dipl.-Ing. Markus Pelz Institut für Verkehrssystemtechnik 2. Februar 2011 > Folie 1 Institut für Verkehrssystemtechnik Sitz: Braunschweig, Berlin Seit: 2001 Leitung:
Anwendungsplattform intelligente Mobilität Was ist AIM? Wie wirkt AIM? Wie wächst AIM?
 Anwendungsplattform intelligente Mobilität Was ist AIM? Wie wirkt AIM? Wie wächst AIM? Institut für Verkehrssystemtechnik PD Dr. Frank Köster 3. Mai 2010 > Folie 1 Was ist? Anwendungsplattform Intelligente
Anwendungsplattform intelligente Mobilität Was ist AIM? Wie wirkt AIM? Wie wächst AIM? Institut für Verkehrssystemtechnik PD Dr. Frank Köster 3. Mai 2010 > Folie 1 Was ist? Anwendungsplattform Intelligente
Sicherheitsforschung im Spannungsfeld globaler Herausforderungen
 Sicherheitsforschung im Spannungsfeld globaler Herausforderungen Festrede beim Neujahrsempfang des VBGU Berlin, 19. Januar 2016 Peter Poete Programmkoordination Sicherheitsforschung Deutsches Zentrum für
Sicherheitsforschung im Spannungsfeld globaler Herausforderungen Festrede beim Neujahrsempfang des VBGU Berlin, 19. Januar 2016 Peter Poete Programmkoordination Sicherheitsforschung Deutsches Zentrum für
Ganzheitliches Flughafenmanagement Stand der Forschung in Deutschland
 Deutsches Zentrum für Luft- und Raumfahrt e.v. Ganzheitliches Flughafenmanagement Stand der Forschung in Deutschland Prof. Dr.-Ing. Johann-Dietrich Wörner Vorstandsvorsitzender DLR Luftfahrt Raumfahrt
Deutsches Zentrum für Luft- und Raumfahrt e.v. Ganzheitliches Flughafenmanagement Stand der Forschung in Deutschland Prof. Dr.-Ing. Johann-Dietrich Wörner Vorstandsvorsitzender DLR Luftfahrt Raumfahrt
Ist Innovation Zufall? 17. März 2015 Dr. Ute Gerhards Jochen Krampe DLR Technologiemarketing
 Ist Innovation Zufall? 17. März 2015 Dr. Ute Gerhards Jochen Krampe DLR Technologiemarketing DLR - Deutsches Zentrum für Luft- und Raumfahrt Forschungseinrichtung Raumfahrtmanagement Projektträger mit
Ist Innovation Zufall? 17. März 2015 Dr. Ute Gerhards Jochen Krampe DLR Technologiemarketing DLR - Deutsches Zentrum für Luft- und Raumfahrt Forschungseinrichtung Raumfahrtmanagement Projektträger mit
Forschung des DLR zum Verkehrsmanagement
 Forschung des DLR zum Verkehrsmanagement Elmar Brockfeld DLR-Institut für Verkehrssystemtechnik, Berlin Tag der Verkehrswirtschaft, IHK Berlin, 24.05.2011 Das Deutsche Zentrum für Luft- und Raumfahrt e.v.
Forschung des DLR zum Verkehrsmanagement Elmar Brockfeld DLR-Institut für Verkehrssystemtechnik, Berlin Tag der Verkehrswirtschaft, IHK Berlin, 24.05.2011 Das Deutsche Zentrum für Luft- und Raumfahrt e.v.
Anwendungsplattform Intelligente Mobilität (AIM)
") Anwendungsplattform Intelligente Mobilität (AIM) Eine ganze Stadt wird zum Verkehrs-Labor www.europa-fuer-niedersachsen.de Das Projekt AIM wurde vom Europäischen Fonds für regionale Entwicklung mit 5,25
Anwendungsplattform Intelligente Mobilität (AIM) Eine ganze Stadt wird zum Verkehrs-Labor www.europa-fuer-niedersachsen.de Das Projekt AIM wurde vom Europäischen Fonds für regionale Entwicklung mit 5,25
Das Deutsche Zentrum für Luft- und Raumfahrt
 Das Deutsche Zentrum für Luft- und Raumfahrt DLR.de Folie 2 Das DLR Deutsches Zentrum für Luft- und Raumfahrt Bild: Nonwarit/Fotolia Forschungszentrum Raumfahrt-Agentur Projektträger DLR.de Folie 3 Standorte
Das Deutsche Zentrum für Luft- und Raumfahrt DLR.de Folie 2 Das DLR Deutsches Zentrum für Luft- und Raumfahrt Bild: Nonwarit/Fotolia Forschungszentrum Raumfahrt-Agentur Projektträger DLR.de Folie 3 Standorte
Automatische Kalibrierung eines Kamerasystems zur Verkehrsdatenerfassung auf Basis von Navigationssensorik Sebastian Schulz, DLR-TS-ANL
 DLR.de Folie 1 03.03.2015, ASW 2016, Wildau Automatische Kalibrierung eines Kamerasystems zur Verkehrsdatenerfassung auf Basis von Navigationssensorik Sebastian Schulz, DLR-TS-ANL DLR.de Folie 2 Agenda
DLR.de Folie 1 03.03.2015, ASW 2016, Wildau Automatische Kalibrierung eines Kamerasystems zur Verkehrsdatenerfassung auf Basis von Navigationssensorik Sebastian Schulz, DLR-TS-ANL DLR.de Folie 2 Agenda
FAMOS Galileo for Future AutoMOtive Systems
 FAMOS Galileo for Future AutoMOtive Systems Dr. Lutz Junge Wolfsburg, 08.09.2009 Der Straßenverkehr wächst! Situation und Entwicklung in Deutschland und Europa Hauptprobleme: Unfalltote 2007 EU-27 42.485
FAMOS Galileo for Future AutoMOtive Systems Dr. Lutz Junge Wolfsburg, 08.09.2009 Der Straßenverkehr wächst! Situation und Entwicklung in Deutschland und Europa Hauptprobleme: Unfalltote 2007 EU-27 42.485
Folie 1 > AIM als Beitrag zur Erhöhung der Verkehrssicherheit > Prof. Dr.-Ing. Karsten Lemmer >
 www.dlr.de Folie 1 Die Anwendungsplattform Intelligente Mobilität (AIM) als Beitrag zur Erhöhung der Verkehrssicherheit Prof. Dr.-Ing. Karsten Lemmer Deutsches Zentrum für Luft- und Raumfahrt e.v. Institut
www.dlr.de Folie 1 Die Anwendungsplattform Intelligente Mobilität (AIM) als Beitrag zur Erhöhung der Verkehrssicherheit Prof. Dr.-Ing. Karsten Lemmer Deutsches Zentrum für Luft- und Raumfahrt e.v. Institut
GSV-Forum City Mobility das Rad ist schon erfunden
 Experience integrated mobility. GSV-Forum City Mobility das Rad ist schon erfunden Städtische Verkehrsinformation und neue Technologien siemens.com/answers Jede Sekunde zwei neue Stadtbewohner! Der Anbruch
Experience integrated mobility. GSV-Forum City Mobility das Rad ist schon erfunden Städtische Verkehrsinformation und neue Technologien siemens.com/answers Jede Sekunde zwei neue Stadtbewohner! Der Anbruch
Algorithmische Probleme der Verkehrssimulation
 Algorithmische Probleme der Verkehrssimulation Michael Behrisch, Daniel Krajzewicz Verkehrssimulation und Optimierung > 26. Oktober 2009 > Folie 1 Organisatorisches Verkehrssimulation und Optimierung >
Algorithmische Probleme der Verkehrssimulation Michael Behrisch, Daniel Krajzewicz Verkehrssimulation und Optimierung > 26. Oktober 2009 > Folie 1 Organisatorisches Verkehrssimulation und Optimierung >
Bayes-Netze (1) Lehrstuhl für Künstliche Intelligenz Institut für Informatik Friedrich-Alexander-Universität Erlangen-Nürnberg
 Lehrstuhl für Künstliche Intelligenz Institut für Informatik Friedrich-Alexander-Universität Erlangen-Nürnberg") Bayes-Netze (1) Lehrstuhl für Künstliche Intelligenz Institut für Informatik Friedrich-Alexander-Universität Erlangen-Nürnberg (Lehrstuhl KI) Bayes-Netze (1) 1 / 22 Gliederung 1 Unsicheres Wissen 2 Schließen
Bayes-Netze (1) Lehrstuhl für Künstliche Intelligenz Institut für Informatik Friedrich-Alexander-Universität Erlangen-Nürnberg (Lehrstuhl KI) Bayes-Netze (1) 1 / 22 Gliederung 1 Unsicheres Wissen 2 Schließen
Aktiver Fußgängerschutz:
 Bundesanstalt für Straßenwesen Aktiver Fußgängerschutz: Notbremsassistenzsysteme zur Verhinderung von Fußgängerunfällen Andre Seeck Leiter der Abteilung Fahrzeugtechnik Patrick Seiniger Jost Gail Referat,
Bundesanstalt für Straßenwesen Aktiver Fußgängerschutz: Notbremsassistenzsysteme zur Verhinderung von Fußgängerunfällen Andre Seeck Leiter der Abteilung Fahrzeugtechnik Patrick Seiniger Jost Gail Referat,
Faserverbundstoffe in der Luftfahrt
 Faserverbundstoffe in der Luftfahrt Dipl.-Ing. Florian Raddatz Deutsches Zentrum für Luft- und Raumfahrt Institut für Faserverbundleichtbau und Adaptronik Sportallee 54 22335 Hamburg E-Mail: Florian.Raddatz@dlr.de
Faserverbundstoffe in der Luftfahrt Dipl.-Ing. Florian Raddatz Deutsches Zentrum für Luft- und Raumfahrt Institut für Faserverbundleichtbau und Adaptronik Sportallee 54 22335 Hamburg E-Mail: Florian.Raddatz@dlr.de
Die Anwendungsplattform für Intelligente Mobilität (AIM) als Baustein eines Smart-City-Konzepts. Prof. Dr. Frank Köster
 als Baustein eines Smart-City-Konzepts. Prof. Dr. Frank Köster") Die Anwendungsplattform für Intelligente Mobilität (AIM) als Baustein eines Smart-City-Konzepts Prof. Dr. Frank Köster DLR Schwerpunkte / Personal / Standorte Forschungsschwerpunkte liegen in den Bereichen
Die Anwendungsplattform für Intelligente Mobilität (AIM) als Baustein eines Smart-City-Konzepts Prof. Dr. Frank Köster DLR Schwerpunkte / Personal / Standorte Forschungsschwerpunkte liegen in den Bereichen
Hintergrund- Information
 Hintergrund- Information München, 11. November 2014 Siemens-Referenzen: Car2X erobert die Straße Die Vision: Dank kooperativer Systeme kommunizieren Fahrzeuge untereinander, mit den Verkehrsleitstellen
Hintergrund- Information München, 11. November 2014 Siemens-Referenzen: Car2X erobert die Straße Die Vision: Dank kooperativer Systeme kommunizieren Fahrzeuge untereinander, mit den Verkehrsleitstellen
Inspiration zur Innovation Strategische Innovationspartnerschaft mit dem DLR
 Inspiration zur Innovation Strategische Innovationspartnerschaft mit dem DLR Mönchengladbach, 26.06.2012 DLR-Technologiemarketing Dr. Ute Gerhards, Harald Grobusch Das DLR Deutsches Zentrum für Luft- und
Inspiration zur Innovation Strategische Innovationspartnerschaft mit dem DLR Mönchengladbach, 26.06.2012 DLR-Technologiemarketing Dr. Ute Gerhards, Harald Grobusch Das DLR Deutsches Zentrum für Luft- und
Autonomes Fahren Technologien und Chancen
 Shaping the future Autonomes Fahren Technologien und Chancen Roland Siegwart, ETH Zurich www.asl.ethz.ch www.wysszurich.ch ETH, Januar 31, 2017 Roland Siegwart 31.01.2017 1 Mobilität der Puls unserer Gesellschaft
Shaping the future Autonomes Fahren Technologien und Chancen Roland Siegwart, ETH Zurich www.asl.ethz.ch www.wysszurich.ch ETH, Januar 31, 2017 Roland Siegwart 31.01.2017 1 Mobilität der Puls unserer Gesellschaft
Intelligente Transportsysteme
 Intelligente Transportsysteme Universität Ulm Fakultät für Informatik Proseminar Künstliche Intelligenz SS 2004 Michael Arnold Typen intelligenter Transportsysteme Fahrer-Assistenz-Systeme Mensch hat Kontrolle
Intelligente Transportsysteme Universität Ulm Fakultät für Informatik Proseminar Künstliche Intelligenz SS 2004 Michael Arnold Typen intelligenter Transportsysteme Fahrer-Assistenz-Systeme Mensch hat Kontrolle
überschreiten. Arbeiten beim DLR.
 Horizonte überschreiten. Arbeiten beim DLR. DLR auf einen Blick 29 Institute 13 Standorte 4 Forschungsbereiche Luftfahrt Raumfahrt Energie Verkehr Hamburg Bremen- Neustrelitz Trauen Braunschweig Berlin-
Horizonte überschreiten. Arbeiten beim DLR. DLR auf einen Blick 29 Institute 13 Standorte 4 Forschungsbereiche Luftfahrt Raumfahrt Energie Verkehr Hamburg Bremen- Neustrelitz Trauen Braunschweig Berlin-
Verkehrsingenieurwesen Studienrichtung Verkehrstelematik Studienrichtung Verkehrstelematik
 Fakultät Verkehrswissenschaften Friedrich List Institut für Verkehrstelematik Studiengang Fakultät Verkehrsingenieurwesen Verkehrsingenieurwesen Studienrichtung Verkehrstelematik Studienrichtung Verkehrstelematik
Fakultät Verkehrswissenschaften Friedrich List Institut für Verkehrstelematik Studiengang Fakultät Verkehrsingenieurwesen Verkehrsingenieurwesen Studienrichtung Verkehrstelematik Studienrichtung Verkehrstelematik
AUF DEM WEG ZUM STÄNDIG VERNETZTEN FAHRZEUGESK , ADAMS Abschlusspräsentation Josef Jiru, Fraunhofer ESK
 AUF DEM WEG ZUM STÄNDIG VERNETZTEN FAHRZEUGESK 3.2.2014, ADAMS Abschlusspräsentation Josef Jiru, Fraunhofer ESK Agenda Überblick Fraunhofer ESK Konnektivität im Fahrzeug ADAMS: Hybride Anbindung über Roadside
AUF DEM WEG ZUM STÄNDIG VERNETZTEN FAHRZEUGESK 3.2.2014, ADAMS Abschlusspräsentation Josef Jiru, Fraunhofer ESK Agenda Überblick Fraunhofer ESK Konnektivität im Fahrzeug ADAMS: Hybride Anbindung über Roadside
Business & Media Breakfast des Digital Hub Frankfurt Rheinmain e.v. Zukunft der Verkehrskommunikation das Forschungsprojekt sim TD
 Business & Media Breakfast des Digital Hub Frankfurt Rheinmain e.v. Zukunft der Verkehrskommunikation das Forschungsprojekt sim TD Dipl.-Geogr. Dorothee Allekotte Straßenverkehrsamt Frankfurt am Main 20.02.2014
Business & Media Breakfast des Digital Hub Frankfurt Rheinmain e.v. Zukunft der Verkehrskommunikation das Forschungsprojekt sim TD Dipl.-Geogr. Dorothee Allekotte Straßenverkehrsamt Frankfurt am Main 20.02.2014
Möglichkeiten der Verbesserung des Verkehrsmanagements durch C2X-Kommunikation
 www.dlr.de Folie 1 Möglichkeiten der Verbesserung des Verkehrsmanagements durch C2X-Kommunikation Daniel Krajzewicz Henning Mosebach Marek Junghans www.dlr.de Folie 2 Gliederung - Institut für Verkehrssystemtechnik
www.dlr.de Folie 1 Möglichkeiten der Verbesserung des Verkehrsmanagements durch C2X-Kommunikation Daniel Krajzewicz Henning Mosebach Marek Junghans www.dlr.de Folie 2 Gliederung - Institut für Verkehrssystemtechnik
Seminar: Verkehrssimulation und Optimierung. Michael Behrisch, Rüdiger Ebendt, Daniel Krajzewicz, Yun-Pang Wang
 Seminar: Verkehrssimulation und Optimierung Michael Behrisch, Rüdiger Ebendt, Daniel Krajzewicz, Yun-Pang Wang Verkehrssimulation und Optimierung >. Oktober 008 > Folie 1 Organisatorisches Verkehrssimulation
Seminar: Verkehrssimulation und Optimierung Michael Behrisch, Rüdiger Ebendt, Daniel Krajzewicz, Yun-Pang Wang Verkehrssimulation und Optimierung >. Oktober 008 > Folie 1 Organisatorisches Verkehrssimulation
Modellierung des operativen und taktischen Verhaltens von Radfahrern an signalgesteuerten Knotenpunkten
 Simulation und Verhaltensmodellierung (SIM) Modellierung des operativen und taktischen Verhaltens von Radfahrern an signalgesteuerten Knotenpunkten Heather Twaddle M.Sc. Technische Universität München
Simulation und Verhaltensmodellierung (SIM) Modellierung des operativen und taktischen Verhaltens von Radfahrern an signalgesteuerten Knotenpunkten Heather Twaddle M.Sc. Technische Universität München
Wenn Autos sprechen könnten Beiträge der Telematik für mehr Sicherheit im Straßenverkehr
 Wenn Autos sprechen könnten Beiträge der Telematik für mehr Sicherheit im Straßenverkehr DVR Presseseminar Verkehrsraum Zukunft Rodgau, 8. November 2012 Wenn Autos sprechen könnten dann wäre das interessant,
Wenn Autos sprechen könnten Beiträge der Telematik für mehr Sicherheit im Straßenverkehr DVR Presseseminar Verkehrsraum Zukunft Rodgau, 8. November 2012 Wenn Autos sprechen könnten dann wäre das interessant,
Erweiterung eines Verfahrens zur automatisierten Parameteridentifikation eines Fahrzeugmodells
 Erweiterung eines Verfahrens zur automatisierten Parameteridentifikation eines Fahrzeugmodells Sebastian Wildfeuer Parameteridentifikation > 23. September 2008 > Folie 1 Themenübersicht Ausgangssituation,
Erweiterung eines Verfahrens zur automatisierten Parameteridentifikation eines Fahrzeugmodells Sebastian Wildfeuer Parameteridentifikation > 23. September 2008 > Folie 1 Themenübersicht Ausgangssituation,
> Spannungsfeld hochautomatisiertes Fahren zwischen Euphorie und Ablehnung > Prof. Dr.-Ing. Karsten Lemmer >
 DLR.de Folie 1 Spannungsfeld hochautomatisiertes Fahren zwischen Euphorie und Ablehnung Prof. Dr.-Ing. Karsten Lemmer Deutsches Zentrum für Luft- und Raumfahrt e.v. Institut für Verkehrssystemtechnik DLR.de
DLR.de Folie 1 Spannungsfeld hochautomatisiertes Fahren zwischen Euphorie und Ablehnung Prof. Dr.-Ing. Karsten Lemmer Deutsches Zentrum für Luft- und Raumfahrt e.v. Institut für Verkehrssystemtechnik DLR.de
Improving the Accuracy of GPS
 Improving the Accuracy of GPS Stephan Kopf, Thomas King, Wolfgang Effelsberg Lehrstuhl für Praktische Informatik IV Universität Mannheim Gliederung Motivation ierungsfehler von GPS Steigerung der Genauigkeit
Improving the Accuracy of GPS Stephan Kopf, Thomas King, Wolfgang Effelsberg Lehrstuhl für Praktische Informatik IV Universität Mannheim Gliederung Motivation ierungsfehler von GPS Steigerung der Genauigkeit
Verkehrsinformationsmanagement am hochrangigen Netz am Beispiel ASFINAG
 Verkehrsinformationsmanagement am hochrangigen Netz am Beispiel ASFINAG DI(FH) Martin Müllner ASFINAG Maut Service GmbH AGIT 2015 Salzburg, 09.07.2015 ASFINAG Kurzüberblick Verkehrsinformation aus Sicht
Verkehrsinformationsmanagement am hochrangigen Netz am Beispiel ASFINAG DI(FH) Martin Müllner ASFINAG Maut Service GmbH AGIT 2015 Salzburg, 09.07.2015 ASFINAG Kurzüberblick Verkehrsinformation aus Sicht
Grundlagen der Objektmodellierung
 Grundlagen der Objektmodellierung Daniel Göhring 30.10.2006 Gliederung Grundlagen der Wahrscheinlichkeitsrechnung Begriffe zur Umweltmodellierung Bayesfilter Zusammenfassung Grundlagen der Wahrscheinlichkeitsrechnung
Grundlagen der Objektmodellierung Daniel Göhring 30.10.2006 Gliederung Grundlagen der Wahrscheinlichkeitsrechnung Begriffe zur Umweltmodellierung Bayesfilter Zusammenfassung Grundlagen der Wahrscheinlichkeitsrechnung
Elektrotechnik und Informationstechnik
 Elektrotechnik und Informationstechnik Institut für Automatisierungstechnik, Professur Prozessleittechnik Bayes'sche Netze VL PLT2 Professur für Prozessleittechnik Prof. Leon Urbas, Dipl. Ing. Johannes
Elektrotechnik und Informationstechnik Institut für Automatisierungstechnik, Professur Prozessleittechnik Bayes'sche Netze VL PLT2 Professur für Prozessleittechnik Prof. Leon Urbas, Dipl. Ing. Johannes
Ein Structure and Motion Ansatz zur Umfeldrekonstruktion in komplexen Fahrzeugumgebungen
 Sicherheit durch Fahrerassistenz 2010 Ein Structure and Motion Ansatz zur Umfeldrekonstruktion in komplexen Fahrzeugumgebungen Wojciech Derendarz, Thorsten Graf Volkswagen AG Friedrich M. Wahl TU Braunschweig,
Sicherheit durch Fahrerassistenz 2010 Ein Structure and Motion Ansatz zur Umfeldrekonstruktion in komplexen Fahrzeugumgebungen Wojciech Derendarz, Thorsten Graf Volkswagen AG Friedrich M. Wahl TU Braunschweig,
Bayes sche und probabilistische Netze
 Bayes sche und probabilistische Netze Gliederung Wahrscheinlichkeiten Bedingte Unabhängigkeit, Deduktion und Induktion Satz von Bayes Bayes sche Netze D-Separierung Probabilistische Inferenz Beispielanwendung
Bayes sche und probabilistische Netze Gliederung Wahrscheinlichkeiten Bedingte Unabhängigkeit, Deduktion und Induktion Satz von Bayes Bayes sche Netze D-Separierung Probabilistische Inferenz Beispielanwendung
Autonomes Fahren und Fahrerassistenz. Prof. Dr.-Ing. Karsten Lemmer Deutsches Zentrum für Luft- und Raumfahrt e.v. Institut für Verkehrssystemtechnik
 www.dlr.de Folie 1 Autonomes Fahren und Fahrerassistenz Prof. Dr.-Ing. Karsten Lemmer Deutsches Zentrum für Luft- und Raumfahrt e.v. Institut für Verkehrssystemtechnik www.dlr.de Folie 2 Mobilität ist
www.dlr.de Folie 1 Autonomes Fahren und Fahrerassistenz Prof. Dr.-Ing. Karsten Lemmer Deutsches Zentrum für Luft- und Raumfahrt e.v. Institut für Verkehrssystemtechnik www.dlr.de Folie 2 Mobilität ist
BikeWave Durch Crowdsourcing die Grüne Welle entdecken und mit ihr radeln.
 BikeWave Durch Crowdsourcing die Grüne Welle entdecken und mit ihr radeln. Robert Schönauer, 29.Mai 2015 @Radgipfel 2015, Klagenfurt. Projektpartner: Finanziert durch: 2 Hintergrund Signalprogramme der
BikeWave Durch Crowdsourcing die Grüne Welle entdecken und mit ihr radeln. Robert Schönauer, 29.Mai 2015 @Radgipfel 2015, Klagenfurt. Projektpartner: Finanziert durch: 2 Hintergrund Signalprogramme der
Energiewende - Zwischen Konzept und Umsetzung. am 3./4. Juni 2013 Wissenschaftszentrum Bonn
 www.dlr.de Folie 1 > Prof. Ulrich Wagner > 3. Juni 2013 Energiewende - Zwischen Konzept und Umsetzung am 3./4. Juni 2013 Wissenschaftszentrum Bonn Prof. Dr.-Ing. Ulrich Wagner DLR Vorstand für Energie
www.dlr.de Folie 1 > Prof. Ulrich Wagner > 3. Juni 2013 Energiewende - Zwischen Konzept und Umsetzung am 3./4. Juni 2013 Wissenschaftszentrum Bonn Prof. Dr.-Ing. Ulrich Wagner DLR Vorstand für Energie
Verkehrsmikrosimulationen mit Echtzeitdaten Herausforderungen und Chancen
 Institut Verkehrstelematik, Professur für Verkehrsleitsysteme und -prozessautomatisierung Verkehrsmikrosimulationen mit Echtzeitdaten Herausforderungen und Chancen Dipl.-Ing. Mario Krumnow Technische Universität
Institut Verkehrstelematik, Professur für Verkehrsleitsysteme und -prozessautomatisierung Verkehrsmikrosimulationen mit Echtzeitdaten Herausforderungen und Chancen Dipl.-Ing. Mario Krumnow Technische Universität
Beiträge der DLR-Sicherheitsforschung zum Katastrophen- und Bevölkerungsschutz
 Beiträge der DLR-Sicherheitsforschung zum Katastrophen- und Bevölkerungsschutz www.dlr.de/sicherheit BMBF Innovationsforum Zivile Sicherheit, Cafe Moskau, Berlin, 17-19-.04.2012 Das Deutsche Zentrum für
Beiträge der DLR-Sicherheitsforschung zum Katastrophen- und Bevölkerungsschutz www.dlr.de/sicherheit BMBF Innovationsforum Zivile Sicherheit, Cafe Moskau, Berlin, 17-19-.04.2012 Das Deutsche Zentrum für
Bayes sche Netze: Konstruktion, Inferenz, Lernen und Kausalität. Volker Tresp
 Bayes sche Netze: Konstruktion, Inferenz, Lernen und Kausalität Volker Tresp 1 Einführung Bisher haben wir uns fast ausschließich mit überwachtem Lernen beschäftigt: Ziel war es, eine (oder mehr als eine)
Bayes sche Netze: Konstruktion, Inferenz, Lernen und Kausalität Volker Tresp 1 Einführung Bisher haben wir uns fast ausschließich mit überwachtem Lernen beschäftigt: Ziel war es, eine (oder mehr als eine)
Innovationsplattform Schutz von Verkehrsinfrastrukturen. Arbeitsgruppe Straßenverkehr. Innovationsplattform: Schutz von Verkehrsinfrastrukturen
 Innovationsplattform Schutz von Verkehrsinfrastrukturen Arbeitsgruppe Straßenverkehr Bonn, den 16.11.2009 Leitung: Bundesanstalt für Straßenwesen 1 Sitzung der der AG Straßenverkehr 18.05.2009: 3. Sitzung
Innovationsplattform Schutz von Verkehrsinfrastrukturen Arbeitsgruppe Straßenverkehr Bonn, den 16.11.2009 Leitung: Bundesanstalt für Straßenwesen 1 Sitzung der der AG Straßenverkehr 18.05.2009: 3. Sitzung
Verkehrslageberechnung mit Floating Car Data und GIP Karl Rehrl, Salzburg Research Präsentation beim GIP Day 2014, 4.7.
 Verkehrslageberechnung mit Floating Car Data und GIP Karl Rehrl, Salzburg Research Präsentation beim GIP Day 2014, 4.7.2014 Überblick 2 1. Motivation 2. Prinzip der Verkehrslageberechnung mit FCD 3. Erkennung
Verkehrslageberechnung mit Floating Car Data und GIP Karl Rehrl, Salzburg Research Präsentation beim GIP Day 2014, 4.7.2014 Überblick 2 1. Motivation 2. Prinzip der Verkehrslageberechnung mit FCD 3. Erkennung
Fahrerassistenzsysteme: Überblick und aktuelle Trends
 Fahrerassistenzsysteme: Überblick und aktuelle Trends Papadakis Ioannis Betreuer: Heiko Schepperle Ausgewählte technische, rechtliche und ökonomische Aspekte des Entwurfs von Fahrerassistenzsystemen Interdisziplinäres
Fahrerassistenzsysteme: Überblick und aktuelle Trends Papadakis Ioannis Betreuer: Heiko Schepperle Ausgewählte technische, rechtliche und ökonomische Aspekte des Entwurfs von Fahrerassistenzsystemen Interdisziplinäres
Kinematische Bestandsdatenerfassung mit Laserscannern
 Kinematische Bestandsdatenerfassung mit Laserscannern 3D MAPPING Das Mobile Straßen Erfassungs- System (MoSES) Aufnahme des Straßen- oder Schienenkorridors mit ca. 40 m Breite Erfassung des Raumes mit
Kinematische Bestandsdatenerfassung mit Laserscannern 3D MAPPING Das Mobile Straßen Erfassungs- System (MoSES) Aufnahme des Straßen- oder Schienenkorridors mit ca. 40 m Breite Erfassung des Raumes mit
Eigene Grünphase für Linksabbieger
 Eigene Grünphase für Linksabbieger Jörg Ortlepp Leiter Verkehrsinfrastruktur Presseforum der Schaden- und Unfallversicherer Berlin, 28.04.2010 2 Unfallgeschehen an Kreuzungen und Einmündungen Deutschland,
Eigene Grünphase für Linksabbieger Jörg Ortlepp Leiter Verkehrsinfrastruktur Presseforum der Schaden- und Unfallversicherer Berlin, 28.04.2010 2 Unfallgeschehen an Kreuzungen und Einmündungen Deutschland,
Aktive und vorausschauende Sicherheitslösungen für ungeschützte Verkehrsteilnehmer
 Aktive und vorausschauende Sicherheitslösungen für ungeschützte Verkehrsteilnehmer GALILEO - Mehrwert für Verkehr und Mobilität? 1. 10. 2008, Technologiezentrum Salzkammergut G. Triebnig, EOX IT Services
Aktive und vorausschauende Sicherheitslösungen für ungeschützte Verkehrsteilnehmer GALILEO - Mehrwert für Verkehr und Mobilität? 1. 10. 2008, Technologiezentrum Salzkammergut G. Triebnig, EOX IT Services
Satellitennavigation Effizienzsteigerung bei gleicher Sicherheit im Schienenverkehr
 Satellitennavigation Effizienzsteigerung bei gleicher Sicherheit im Schienenverkehr Dr.-Ing. Klaus P. Jaschke (Siemens AG, TS RA) und Dr.-Ing. Michael Meyer zu Hörste (DLR FS) Sat-Nav > Köln > 31. Mai
Satellitennavigation Effizienzsteigerung bei gleicher Sicherheit im Schienenverkehr Dr.-Ing. Klaus P. Jaschke (Siemens AG, TS RA) und Dr.-Ing. Michael Meyer zu Hörste (DLR FS) Sat-Nav > Köln > 31. Mai
Lösungen für nachhaltige Mobilität erforschen und weitergeben!
 Lösungen für nachhaltige Mobilität erforschen und weitergeben! Univ.-Prof. Dipl.-Ing. Dr. techn. Markus Mailer Universität Innsbruck Institut für Infrastruktur Leiter Arbeitsbereich Intelligente Verkehrssysteme
Lösungen für nachhaltige Mobilität erforschen und weitergeben! Univ.-Prof. Dipl.-Ing. Dr. techn. Markus Mailer Universität Innsbruck Institut für Infrastruktur Leiter Arbeitsbereich Intelligente Verkehrssysteme
Intelligente Energieversorgung in Gebäuden
 Intelligente Energieversorgung in Gebäuden durch individuelle Energiemanagementsysteme Thomas Hofmann 27.092016 1 Copyright ESI Copyright Group, 2016. ESI Group, All rights 2016. reserved. All rights reserved.
Intelligente Energieversorgung in Gebäuden durch individuelle Energiemanagementsysteme Thomas Hofmann 27.092016 1 Copyright ESI Copyright Group, 2016. ESI Group, All rights 2016. reserved. All rights reserved.
Integrated result data management in the development process of vehicle systems based on the ASAM ODS standard
 Integrated result data management in the development process of vehicle systems based on the ASAM ODS standard Dipl.-Ing. (FH) Stefan Geneder, Technische Hochschule Ingolstadt Dr. Felix Pfister, AVL List,
Integrated result data management in the development process of vehicle systems based on the ASAM ODS standard Dipl.-Ing. (FH) Stefan Geneder, Technische Hochschule Ingolstadt Dr. Felix Pfister, AVL List,
Bayessche Netze. Kevin Klamt und Rona Erdem Künstliche Intelligenz II SoSe 2012 Dozent: Claes Neuefeind
 Bayessche Netze Kevin Klamt und Rona Erdem Künstliche Intelligenz II SoSe 2012 Dozent: Claes Neuefeind Einleitung Sicheres vs. Unsicheres Wissen Kausale Netzwerke Abhängigkeit Verbindungsarten Exkurs:
Bayessche Netze Kevin Klamt und Rona Erdem Künstliche Intelligenz II SoSe 2012 Dozent: Claes Neuefeind Einleitung Sicheres vs. Unsicheres Wissen Kausale Netzwerke Abhängigkeit Verbindungsarten Exkurs:
Stücke des Puzzles hochautomatisiertes Fahren: H-Metapher und H-Mode Zwischenbericht 2006
 Stücke des Puzzles hochautomatisiertes Fahren: H-Metapher und H-Mode Zwischenbericht 2006 Dr.-Ing. Frank O. Flemisch, Dipl.-Ing. Johann Kelsch, Dipl.-Psych. Anna Schieben, Dipl.-Inform. Julian Schindler
Stücke des Puzzles hochautomatisiertes Fahren: H-Metapher und H-Mode Zwischenbericht 2006 Dr.-Ing. Frank O. Flemisch, Dipl.-Ing. Johann Kelsch, Dipl.-Psych. Anna Schieben, Dipl.-Inform. Julian Schindler
Simulationsmodelle im Verkehr
 Simulationsmodelle im Verkehr Michael Reimann Betreuer: Heiko Schepperle Ausgewählte technische, rechtliche und ökonomische Aspekte des Entwurfs von Fahrerassistenzsystemen Interdisziplinäres Seminar im
Simulationsmodelle im Verkehr Michael Reimann Betreuer: Heiko Schepperle Ausgewählte technische, rechtliche und ökonomische Aspekte des Entwurfs von Fahrerassistenzsystemen Interdisziplinäres Seminar im
Ausbildung. Ausbildung. Stuttgart
 Ausbildung Ausbildung Stuttgart Ausbildung im DLR Stuttgart Sie suchen eine interessante und abwechslungsreiche Ausbildung? Sie begeistern sich für aktuelle Forschungs- und Entwicklungsthemen aus Luft-
Ausbildung Ausbildung Stuttgart Ausbildung im DLR Stuttgart Sie suchen eine interessante und abwechslungsreiche Ausbildung? Sie begeistern sich für aktuelle Forschungs- und Entwicklungsthemen aus Luft-
Einfluss von Geschwindigkeit und Verkehrsstärke auf das Unfallgeschehen in Stadtstraßen
 Einfluss von Geschwindigkeit und Verkehrsstärke auf das Unfallgeschehen in Stadtstraßen Konzept Technische Universität Dresden Professur Straßenverkehrstechnik mit Fachbereich Theorie der Verkehrsplanung
Einfluss von Geschwindigkeit und Verkehrsstärke auf das Unfallgeschehen in Stadtstraßen Konzept Technische Universität Dresden Professur Straßenverkehrstechnik mit Fachbereich Theorie der Verkehrsplanung
School of Engineering Institut für Angewandte Mathematik und Physik (IAMP)
") School of Engineering Institut für Angewandte Mathematik und Physik (IAMP) Zürcher Fachhochschule www.iamp.zhaw.ch Forschung & Entwicklung P1 P1-A S1 S2 P2 P1-B P2-A O1 O2 O3 2oo3 P2-B Institut für Angewandte
School of Engineering Institut für Angewandte Mathematik und Physik (IAMP) Zürcher Fachhochschule www.iamp.zhaw.ch Forschung & Entwicklung P1 P1-A S1 S2 P2 P1-B P2-A O1 O2 O3 2oo3 P2-B Institut für Angewandte
Verlustzeitbasierte LSA-Steuerung
 Verlustzeitbasierte LSA-Steuerung Robert Oertel* und Peter Wagner Deutsches Zentrum für Luft- und Raumfahrt e.v. Institut für Verkehrssystemtechnik 6. VIMOS-Tagung, Dresden 15.12.2010 Institut für Verkehrssystemtechnik
Verlustzeitbasierte LSA-Steuerung Robert Oertel* und Peter Wagner Deutsches Zentrum für Luft- und Raumfahrt e.v. Institut für Verkehrssystemtechnik 6. VIMOS-Tagung, Dresden 15.12.2010 Institut für Verkehrssystemtechnik
Electric Propulsion-Testanlage in Göttingen. Messungen am RIT
 Electric Propulsion-Testanlage in Göttingen Messungen am RIT Andreas Neumann DLR Göttingen Mühlleithen, 5.-8. März 2013 Folie 1 Inhalt Einleitung DLR, Raumfahrtantriebe und elektrische Triebwerke Die neue
Electric Propulsion-Testanlage in Göttingen Messungen am RIT Andreas Neumann DLR Göttingen Mühlleithen, 5.-8. März 2013 Folie 1 Inhalt Einleitung DLR, Raumfahrtantriebe und elektrische Triebwerke Die neue
Seegangsmonitor. hochauflösende Wellenvorhersagen und -analysen für die deutschen Küsten
 Seegangsmonitor hochauflösende Wellenvorhersagen und -analysen für die deutschen Küsten Jens Kieser, Thomas Bruns Deutscher Wetterdienst (DWD) Anja Lindenthal, Frank Janssen, Thorger Brüning Bundesamt
Seegangsmonitor hochauflösende Wellenvorhersagen und -analysen für die deutschen Küsten Jens Kieser, Thomas Bruns Deutscher Wetterdienst (DWD) Anja Lindenthal, Frank Janssen, Thorger Brüning Bundesamt
> Seminar, Erlangen > Achim Basermann 20120605-1 DSC Erlangen Basermann.pptx > 05.06.2012
 www.dlr.de Folie 1 Parallele, iterative Löser mit Schur-Komplement- Vorkonditionierung für dünnbesetzte lineare Gleichungssysteme aus der Strömungstechnik Dr.-Ing. Achim Basermann, Melven Zöllner* * www.dlr.de
www.dlr.de Folie 1 Parallele, iterative Löser mit Schur-Komplement- Vorkonditionierung für dünnbesetzte lineare Gleichungssysteme aus der Strömungstechnik Dr.-Ing. Achim Basermann, Melven Zöllner* * www.dlr.de
Das E-Auto und intelligente Mobilitätskonzepte für übermorgen
 Das E-Auto und intelligente Mobilitätskonzepte für übermorgen Sicht der Forschung aus dem Bereich Künstliche Intelligenz und Robotik 31.10.2013, Baunatal Jens Mey DFKI Bremen & Universität Bremen Robotics
Das E-Auto und intelligente Mobilitätskonzepte für übermorgen Sicht der Forschung aus dem Bereich Künstliche Intelligenz und Robotik 31.10.2013, Baunatal Jens Mey DFKI Bremen & Universität Bremen Robotics
1. Augsburger Produktionstechnik - Kolloquium
 1. Augsburger Produktionstechnik - Kolloquium Automation in der Produktion von Composite-Strukturen im Flugzeugbau. Augsburg, 18. Mai 2011 Zentrum für Leichtbau-Produktionstechnologie im Deutschen Zentrum
1. Augsburger Produktionstechnik - Kolloquium Automation in der Produktion von Composite-Strukturen im Flugzeugbau. Augsburg, 18. Mai 2011 Zentrum für Leichtbau-Produktionstechnologie im Deutschen Zentrum
Abbiegeassistenz für Lkw Unfallsituation, Grundlagen und Anforderungen
 Abbiegeassistenz für Lkw Unfallsituation, Grundlagen und Anforderungen Dr. Patrick Seiniger Referat Aktive Fahrzeugsicherheit und Fahrerassistenz Bundesanstalt für Straßenwesen (BASt) Bundesanstalt für
Abbiegeassistenz für Lkw Unfallsituation, Grundlagen und Anforderungen Dr. Patrick Seiniger Referat Aktive Fahrzeugsicherheit und Fahrerassistenz Bundesanstalt für Straßenwesen (BASt) Bundesanstalt für
Simulation of Urban MObility - SUMO Eine freie Verkehrssimulation
 Simulation of Urban MObility - SUMO Eine freie Verkehrssimulation Michael Behrisch, Daniel Krajzewicz Institut für Verkehrssystemtechnik Folie 1 > Simulation of Urban MObility > Daniel Krajzewicz Verkehrssimulation
Simulation of Urban MObility - SUMO Eine freie Verkehrssimulation Michael Behrisch, Daniel Krajzewicz Institut für Verkehrssystemtechnik Folie 1 > Simulation of Urban MObility > Daniel Krajzewicz Verkehrssimulation
Gliederung Unfallanalyse Szenarien Technologien Ausblick. car2ped
 car2ped Überlegungen zur Verbesserung des Fußgängerschutzes durch Nutzung der Car-to-X-Technologie Prof. Dr.-Ing. Lars Wolf Institut für Betriebssysteme und Rechnerverbund Technische Universität Braunschweig
car2ped Überlegungen zur Verbesserung des Fußgängerschutzes durch Nutzung der Car-to-X-Technologie Prof. Dr.-Ing. Lars Wolf Institut für Betriebssysteme und Rechnerverbund Technische Universität Braunschweig
Technik statt Mensch?
 Technik statt Mensch? Geschwindigkeitsbeeinflussung durch Fahrerassistenzsysteme Überblick Sicher rasen geht das? Schnelle Unfälle was ist der Fehler? ISA immer intelligentere Technik Technik und Mensch
Technik statt Mensch? Geschwindigkeitsbeeinflussung durch Fahrerassistenzsysteme Überblick Sicher rasen geht das? Schnelle Unfälle was ist der Fehler? ISA immer intelligentere Technik Technik und Mensch
Vorstellung des BMWi-Fachprogramms Neue Fahrzeug- und Systemtechnologien Berlin, 4. Juli 2016
 Vorstellung des BMWi-Fachprogramms Neue Fahrzeug- und Systemtechnologien Berlin, 4. Juli 2016 Projektträger TÜV Rheinland TÜV Rheinland Consulting GmbH, Forschungsmanagement TÜV Rheinland Consulting GmbH
Vorstellung des BMWi-Fachprogramms Neue Fahrzeug- und Systemtechnologien Berlin, 4. Juli 2016 Projektträger TÜV Rheinland TÜV Rheinland Consulting GmbH, Forschungsmanagement TÜV Rheinland Consulting GmbH
Aktiver Fußgängerschutz:
 Aktiver Fußgängerschutz: Notbremsassistenzsysteme zur Verhinderung von Fußgängerunfällen Andre Seeck Leiter der Abteilung Fahrzeugtechnik Patrick Seiniger Jost Gail Referat Aktive Fahrzeugsicherheit, Emissionen,
Aktiver Fußgängerschutz: Notbremsassistenzsysteme zur Verhinderung von Fußgängerunfällen Andre Seeck Leiter der Abteilung Fahrzeugtechnik Patrick Seiniger Jost Gail Referat Aktive Fahrzeugsicherheit, Emissionen,
Ingenieur in der Forschung
 Beruf: Ingenieur in der Forschung Wie wird man Ingenieur? Was macht ein Ingenieur? DLR Deutsches Zentrum für Luft- und Raumfahrt e.v. in Stuttgart Institut für Fahrzeugkonzepte Andreas Brinner Pfaffenwaldring
Beruf: Ingenieur in der Forschung Wie wird man Ingenieur? Was macht ein Ingenieur? DLR Deutsches Zentrum für Luft- und Raumfahrt e.v. in Stuttgart Institut für Fahrzeugkonzepte Andreas Brinner Pfaffenwaldring
Intelligente Mobilität in Berlin-Brandenburg Christian Heinrich, Berlin Partner für Wirtschaft und Technologie GmbH, 13.
 Intelligente Mobilität in Berlin-Brandenburg Christian Heinrich, Berlin Partner für Wirtschaft und Technologie GmbH, 13. November 2015 Gefördert aus Mitteln der Länder Berlin und Brandenburg und der Investitionsbank
Intelligente Mobilität in Berlin-Brandenburg Christian Heinrich, Berlin Partner für Wirtschaft und Technologie GmbH, 13. November 2015 Gefördert aus Mitteln der Länder Berlin und Brandenburg und der Investitionsbank
Sicherheit im Straßenverkehr Unfalllage 2010
 Sicherheit im Straßenverkehr Unfalllage 2010 Mastertitelformat bearbeiten Master-Untertitelformat bearbeiten 1 Verkehrssicherheit 2010 Verkehrsunfall-Bilanz 2010: Unfälle gesamt: 64.375 [+ 812] davon 11,2
Sicherheit im Straßenverkehr Unfalllage 2010 Mastertitelformat bearbeiten Master-Untertitelformat bearbeiten 1 Verkehrssicherheit 2010 Verkehrsunfall-Bilanz 2010: Unfälle gesamt: 64.375 [+ 812] davon 11,2
Verkehrssimulation als Instrument zur Unfallvorhersage. Jens Lauterbach M.Eng.
 Verkehrssimulation als Instrument zur Unfallvorhersage Jens Lauterbach M.Eng. Ziel: Entwicklung von Ansätzen zur Unfallprognose Quelle: Eigene Darstellung Seite 2 Konfliktanalyse - Konflikt: Kritische
Verkehrssimulation als Instrument zur Unfallvorhersage Jens Lauterbach M.Eng. Ziel: Entwicklung von Ansätzen zur Unfallprognose Quelle: Eigene Darstellung Seite 2 Konfliktanalyse - Konflikt: Kritische
Modellierung des Verkehrs als Flüssigkeit. Proseminar Algorithmen der Verkehrssimulation WS 05/06 Atanas Gegov
 Modellierung des Verkehrs als Flüssigkeit Proseminar Algorithmen der Verkehrssimulation WS 05/06 Atanas Gegov Gliederung: 1. Gründe für das Interesse an Verkehr und dessen Probleme 2. Verschiedene Verkehrsmodelle
Modellierung des Verkehrs als Flüssigkeit Proseminar Algorithmen der Verkehrssimulation WS 05/06 Atanas Gegov Gliederung: 1. Gründe für das Interesse an Verkehr und dessen Probleme 2. Verschiedene Verkehrsmodelle
movebw Mobilitätsinformation und Verkehrssteuerung Baden-Württemberg
 movebw Mobilitätsinformation und Verkehrssteuerung Baden-Württemberg Stetig fließender Verkehr in den Metropolregionen Baden- Württembergs ist in unterschiedlichster Weise ein wichtiger Faktor für Bürger,
movebw Mobilitätsinformation und Verkehrssteuerung Baden-Württemberg Stetig fließender Verkehr in den Metropolregionen Baden- Württembergs ist in unterschiedlichster Weise ein wichtiger Faktor für Bürger,
Überblick. Einführung in die automatische Mustererkennung Grundlagen der Wahrscheinlichkeitsrechnung
 Grundlagen Überblick Einführung in die automatische Mustererkennung Grundlagen der Wahrscheinlichkeitsrechnung Klassifikation bei bekannter Wahrscheinlichkeitsverteilung Entscheidungstheorie Bayes- Entscheidungsfunktionen
Grundlagen Überblick Einführung in die automatische Mustererkennung Grundlagen der Wahrscheinlichkeitsrechnung Klassifikation bei bekannter Wahrscheinlichkeitsverteilung Entscheidungstheorie Bayes- Entscheidungsfunktionen
Fördermöglichkeiten verschiedener Kooperationsformen
 Peter Ulrich (EVTZ-Kompetenzzentrum) Fördermöglichkeiten verschiedener Kooperationsformen Frankfurt (Oder), 2.12.2014 Fördermöglichkeiten verschiedener Kooperationsformen 1. Einleitung 2. Strategien grenzüberschreitenden
Peter Ulrich (EVTZ-Kompetenzzentrum) Fördermöglichkeiten verschiedener Kooperationsformen Frankfurt (Oder), 2.12.2014 Fördermöglichkeiten verschiedener Kooperationsformen 1. Einleitung 2. Strategien grenzüberschreitenden
Analyse großer heterogener Daten in der Luft- und Raumfahrtforschung Andreas Schreiber
 DLR.de Folie 1 > Big-Data-Konferenz #2, Startplatz > A. Schreiber Analyse großer heterogener Daten in der Luft- und Raumfahrtforschung > 08.12.2015 Analyse großer heterogener Daten in der Luft- und Raumfahrtforschung
DLR.de Folie 1 > Big-Data-Konferenz #2, Startplatz > A. Schreiber Analyse großer heterogener Daten in der Luft- und Raumfahrtforschung > 08.12.2015 Analyse großer heterogener Daten in der Luft- und Raumfahrtforschung
Automatisierungstechnik. - Quo vadis?
 Universität Stuttgart Institut für Automatisierungs- und Softwaretechnik Prof. Dr.-Ing. Dr. h. c. P. Göhner Automatisierungstechnik - Quo vadis? Prof. Dr.-Ing. Dr. h. c. Peter Göhner anlässlich des Fest-Kolloquiums
Universität Stuttgart Institut für Automatisierungs- und Softwaretechnik Prof. Dr.-Ing. Dr. h. c. P. Göhner Automatisierungstechnik - Quo vadis? Prof. Dr.-Ing. Dr. h. c. Peter Göhner anlässlich des Fest-Kolloquiums
Client gesteuerte Übertragung zur Minimierung der Wechselwirkung zwischen H2H und M2M Verkehr in LTE
 ComNets Workshop 2013 Client gesteuerte Übertragung zur Minimierung der Wechselwirkung zwischen H2H und M2M Verkehr in LTE 15.11.2013 Inhalt Kommunikation für die dynamische Verkehrsprognose Lösungsansatz:
ComNets Workshop 2013 Client gesteuerte Übertragung zur Minimierung der Wechselwirkung zwischen H2H und M2M Verkehr in LTE 15.11.2013 Inhalt Kommunikation für die dynamische Verkehrsprognose Lösungsansatz:
Radikaler Umbruch in der Fahrzeug- und Systemabsicherung. Steffen Kuhn
 Radikaler Umbruch in der Fahrzeug- und Systemabsicherung Steffen Kuhn 21.04.2016 Autonomes Fahren ist das erklärte Ziel von Automobilherstellern, Zulieferern und Dienstleistern In Zukunft muss nicht nur
Radikaler Umbruch in der Fahrzeug- und Systemabsicherung Steffen Kuhn 21.04.2016 Autonomes Fahren ist das erklärte Ziel von Automobilherstellern, Zulieferern und Dienstleistern In Zukunft muss nicht nur
Ein Qualitätskonzept zur. Bereitstellung betriebsleittechnisch
 Ein Qualitätskonzept zur Bereitstellung betriebsleittechnisch sicherer Information Thomas Wiltschko Automatisierung für Schienenverkehrssysteme Dresden, 30. Juni 2006 Sicherheitsrelevante Systeme Beispiel:
Ein Qualitätskonzept zur Bereitstellung betriebsleittechnisch sicherer Information Thomas Wiltschko Automatisierung für Schienenverkehrssysteme Dresden, 30. Juni 2006 Sicherheitsrelevante Systeme Beispiel:
Angewandte Signalverarbeitung
 Institut für Elektrische Meßtechnik und Meßsignalv erarbeitung Angewandte Signalverarbeitung Empfohlene Vorkenntnisse SV HW SW BV NT Signalverarbeitung (LVs: Signalverarbeitung, Digitale Messsysteme) Hardware-Entwicklung
Institut für Elektrische Meßtechnik und Meßsignalv erarbeitung Angewandte Signalverarbeitung Empfohlene Vorkenntnisse SV HW SW BV NT Signalverarbeitung (LVs: Signalverarbeitung, Digitale Messsysteme) Hardware-Entwicklung
AIM als Baustein eines Smart-City Konzepts
 AIM als Baustein eines Smart-City Konzepts Prof. Dr. Frank Köster September 2014 Ziele des DLR im Bereich Verkehr grün z.b. umweltoptimiertes Verkehrsmanagement, effizientere und alternative Antriebe smart
AIM als Baustein eines Smart-City Konzepts Prof. Dr. Frank Köster September 2014 Ziele des DLR im Bereich Verkehr grün z.b. umweltoptimiertes Verkehrsmanagement, effizientere und alternative Antriebe smart
MOBILITÄT NEU DENKEN
 VON DER KOEXISTENZ ZUR KOOPERATION ANDREAS HERRMANN Operationelles Programm EFRE Sachsen-Anhalt 2007 2013 Projektnummer: EFRE16.1.06.14.00034 WICHTIGE ANSATZPUNKTE zu viele schwere und tödliche Verkehrsunfälle,
VON DER KOEXISTENZ ZUR KOOPERATION ANDREAS HERRMANN Operationelles Programm EFRE Sachsen-Anhalt 2007 2013 Projektnummer: EFRE16.1.06.14.00034 WICHTIGE ANSATZPUNKTE zu viele schwere und tödliche Verkehrsunfälle,
Testfeld Niedersachsen Umsetzungsplanung eines Testfeldes für automatisiertes und vernetztes Fahren in Niedersachsen
 Testfeld Niedersachsen Umsetzungsplanung eines Testfeldes für automatisiertes und vernetztes Fahren in Niedersachsen Prof. Dr. Frank Köster Automatisiertes Fahren & kooperative Fahrzeuge Fortschrittliche
Testfeld Niedersachsen Umsetzungsplanung eines Testfeldes für automatisiertes und vernetztes Fahren in Niedersachsen Prof. Dr. Frank Köster Automatisiertes Fahren & kooperative Fahrzeuge Fortschrittliche
Open Source in der Luft- und Raumfahrt-Forschung FrOSCon 2010
 Open Source in der Luft- und Raumfahrt-Forschung FrOSCon 2010 Andreas Schreiber Deutsches Zentrum für Luft- und Raumfahrt e.v., Köln/Braunschweig/Berlin http://www.dlr.de/sc
Open Source in der Luft- und Raumfahrt-Forschung FrOSCon 2010 Andreas Schreiber Deutsches Zentrum für Luft- und Raumfahrt e.v., Köln/Braunschweig/Berlin http://www.dlr.de/sc
MODELLING AND CONTROLLING THE STEERING FORCE FEEDBACK USING SIMULINK AND xpc TARGET
 MODELLING AND CONTROLLING THE STEERING FORCE FEEDBACK USING SIMULINK AND xpc TARGET Dipl.-Ing. M. Brünger-Koch, 05/06/09 Model-Based Design Conference 2005 1 Agenda 1. Introduction Company and institute
MODELLING AND CONTROLLING THE STEERING FORCE FEEDBACK USING SIMULINK AND xpc TARGET Dipl.-Ing. M. Brünger-Koch, 05/06/09 Model-Based Design Conference 2005 1 Agenda 1. Introduction Company and institute
Das Frühwarnsystem für die. Das Frühwarnsystem für die Ausliefer-Produkt-Audits (APA) (APA)
 (APA)") Das Frühwarnsystem für die Das Frühwarnsystem für die Ausliefer-Produkt-Audits (APA) (APA) Das Frühwarnsystem für die Ausliefer-Produkt-Audits (APA) Gliederung: Auswertung der APA-Daten Datengrundlage
Das Frühwarnsystem für die Das Frühwarnsystem für die Ausliefer-Produkt-Audits (APA) (APA) Das Frühwarnsystem für die Ausliefer-Produkt-Audits (APA) Gliederung: Auswertung der APA-Daten Datengrundlage
Der Einfluss der Security auf die Safety bei satellitenbasierten Ortungssystemen
 Der Einfluss der Security auf die Safety bei satellitenbasierten Ortungssystemen Dr. Michael Meyer zu Hörste, DLR Institut für Verkehrssystemtechnik Workshop Safety in Transport 2011 Inhalt 1. Arbeitsweise
Der Einfluss der Security auf die Safety bei satellitenbasierten Ortungssystemen Dr. Michael Meyer zu Hörste, DLR Institut für Verkehrssystemtechnik Workshop Safety in Transport 2011 Inhalt 1. Arbeitsweise
Verkehrsregelungszentrale Berlin Verkehrsmanagement für die Mobilität in der Stadt
 Verkehrslenkung Berlin Verkehrsregelungszentrale Berlin Verkehrsmanagement für die Mobilität in der Stadt Die Verkehrsregelungszentrale Berlin Täglich verbringen Sie durchschnittlich 70 Minuten im Verkehr
Verkehrslenkung Berlin Verkehrsregelungszentrale Berlin Verkehrsmanagement für die Mobilität in der Stadt Die Verkehrsregelungszentrale Berlin Täglich verbringen Sie durchschnittlich 70 Minuten im Verkehr
Das Hinderniserkennungssystem Radar um die Kurve
 Das Hinderniserkennungssystem Radar um die Kurve 1. Wozu? 2. Notwendigkeit bei kleinen SchienenTaxis oder anderen intelligenten Schienenfahrzeugen 3. Wie funktioniert es? 4. Einsatz bei Nebenbahnen zur
Das Hinderniserkennungssystem Radar um die Kurve 1. Wozu? 2. Notwendigkeit bei kleinen SchienenTaxis oder anderen intelligenten Schienenfahrzeugen 3. Wie funktioniert es? 4. Einsatz bei Nebenbahnen zur
mm-lab s CAVE Collision Awareness System mm-lab GmbH Andreas.Streit@mmlab.de Andreas Streit Geschäftsführer Stammheimer Straße 10 70806 Kornwestheim
 mm-lab s CAVE Collision Awareness System HFT, 21.04.2016 Andreas Streit Geschäftsführer mm-lab GmbH Andreas.Streit@mmlab.de Stammheimer Straße 10 70806 Kornwestheim Ende-zu-Ende Telematiklösungen Verbesserung
mm-lab s CAVE Collision Awareness System HFT, 21.04.2016 Andreas Streit Geschäftsführer mm-lab GmbH Andreas.Streit@mmlab.de Stammheimer Straße 10 70806 Kornwestheim Ende-zu-Ende Telematiklösungen Verbesserung
ES-Projektseminar (SS 2012)
") ES-Projektseminar (SS 2012) Endvortrag Team Justice League of America Dominik Matthias [Team ] Pascal Stephen Vorname Name; ES Real-Time Systems Lab Prof. Dr. rer. nat. Andy Schürr Dept. of Electrical
ES-Projektseminar (SS 2012) Endvortrag Team Justice League of America Dominik Matthias [Team ] Pascal Stephen Vorname Name; ES Real-Time Systems Lab Prof. Dr. rer. nat. Andy Schürr Dept. of Electrical
Satellitennavigation im Verkehr 22. Mai 2007
 Satellitennavigation im Verkehr Günther Kasties Geschäftsführender Gesellschafter OECON GmbH Autor: Dipl. Ing. Günther Kasties Copyright: OECON GmbH 1 Kompetenzen OECON Gruppe OECON Gruppe (www.oecon-line.de)
Satellitennavigation im Verkehr Günther Kasties Geschäftsführender Gesellschafter OECON GmbH Autor: Dipl. Ing. Günther Kasties Copyright: OECON GmbH 1 Kompetenzen OECON Gruppe OECON Gruppe (www.oecon-line.de)
Künstliche Intelligenz Unsicherheit. Stephan Schwiebert WS 2009/2010 Sprachliche Informationsverarbeitung Institut für Linguistik Universität zu Köln
 Künstliche Intelligenz Unsicherheit Stephan Schwiebert WS 2009/2010 Sprachliche Informationsverarbeitung Institut für Linguistik Universität zu Köln Rückblick Agent in der Wumpuswelt konnte Entscheidungen
Künstliche Intelligenz Unsicherheit Stephan Schwiebert WS 2009/2010 Sprachliche Informationsverarbeitung Institut für Linguistik Universität zu Köln Rückblick Agent in der Wumpuswelt konnte Entscheidungen
Simulative Untersuchungen abstrakter und realer Verkehrsmanagementansätze zur Emissionsreduktion , Kolloquium Luftqualität an Straßen
 Simulative Untersuchungen abstrakter und realer Verkehrsmanagementansätze zur Emissionsreduktion 20.03.2013, Kolloquium Luftqualität an Straßen Daniel Krajzewicz, Yun-Pang Flötteröd Deutsches Zentrum für
Simulative Untersuchungen abstrakter und realer Verkehrsmanagementansätze zur Emissionsreduktion 20.03.2013, Kolloquium Luftqualität an Straßen Daniel Krajzewicz, Yun-Pang Flötteröd Deutsches Zentrum für