Entwicklung und experimentelle Erprobung von perzeptorisch geregelten Grundgeschicklichkeiten humanoider Roboter
|
|
|
- Alexander Feld
- vor 6 Jahren
- Abrufe
Transkript
1 Entwicklung und experimentelle Erprobung von perzeptorisch geregelten Grundgeschicklichkeiten humanoider Roboter G. Milighetti, T. Emter, C. Frey, H.-B. Kuntze Fraunhofer-Institut für Optronik, Systemtechnik und Bildauswertung (IOSB) Abteilung Mess-, Regelungs- und Diagnosesysteme (MRD) 0
2 Entwicklung und experimentelle Erprobung von perzeptorisch geregelten Grundgeschicklichkeiten humanoider Roboter Einleitung Versuchs- und Entwicklungsplattform Implementierung von Grundgeschicklichkeiten Zusammenfassung

3 Einleitung Aufgaben eines humanoiden Roboters: Direkte Interaktion mit dem Menschen Stark veränderliche Umgebung Bedarf nach menschenähnlichen Fähigkeiten Ihre Bewältigung erfordert Grundgeschicklichkeiten auf Basis von: künstlichen Sinnen (Sehen, Hören, Fühlen,...) zur Perzeption der komplexen Umgebung leistungsfähigen Methoden zur intelligenten multisensoriellen Fusion der erfassten Umweltinformationen anwendungsspezifischen Planungs- und Regelungsstrategien durch Zerlegung komplexer Aufgaben in Aktionsprimitive 3
 bei stehendem Unterkörper Einige Grundgeschicklichkeiten")
4 Einleitung Entwicklung der notwendigen Grundmethodik im Sonderforschungsbereich SFB 588 Humanoide Roboter Versuchs- und Entwicklungsplattform ermöglicht Untersuchung von Grundgeschicklichkeiten entkoppelt von anderen F&E-Arbeiten am Roboter Mehrzahl der Grundgeschicklichkeiten erfordert den Einsatz des Oberkörpers (Kopf, Arme, Hände) bei stehendem Unterkörper Einige Grundgeschicklichkeiten müssen auch während der Laufbewegung des Unterkörpers bewältigt werden (z. B. Tragen eines Tabletts) 4

5 Einleitung Implementierung komplexer Grundgeschicklichkeiten erfordert: Multisensorielles diskret-kontinuierlichen Überwachungs- und Regelungskonzept Eine modulare dynamische Aufgabenstruktur basierend auf Aktionsprimitiven und Petri-Netzen Einen echtzeitfähigen und transparenten Fuzzy- Entscheidungsfindungsalgorithmus 5

6 Versuchs- und Entwicklungsplattform 1. 2DoF-Sensorkopf 2. Linker 7DoF-Arm 3. Rechter 7DoF-Arm 4. 2-Finger-Greifer 5. 5-Finger-Hand 6. Mikrofon-Array 7. Stereokamera 8. Handkamera 9. Kraft-Momenten- Sensoren 10. Taktile Sensoren 11. Schlupfsensor 6

7 Versuchs- und Entwicklungsplattform Entwicklung eine Versuchsplattform zur Untersuchung umweltinteraktiver Regelungsalgorithmen beim Laufen: Handhabungen/Interaktion durch Teilkomponente des Oberkörpers (z. B. Kopf, Arm) Stewart-Plattform zur Simulation der Hüftbewegung Mobiler Roboter zur Nachbildung der Laufgeschwindigkeit 7


8 Versuchs- und Entwicklungsplattform x c y c z c Motion [mm] Bewegungsdaten aus dem Sportinstitut Time [s] 8



9 Sicht- und kraftgeregeltes Fügen Stereokamera Grobe Schätzung der Position der Bohrung mittels Stereokamera Erstellung des Kontakts Abtasten der Oberfläche mittels Kraft-Moment-Sensor zur genaueren Schätzung der Sollposition Positionsgeregeltes Fügen Kraft-Moment-Sensor 9
 Handkamera Greifen des")
10 Hören, Sehen und Greifen Audio-Array und Stereokamera Grobe Lokalisierung eines Geräuschquelle durch das 3D-Audio-Array Ausrichtung der Stereokamera und visuelle Bestimmung der Position des heruntergefallenen Objektes Sichtgeregelte Annährung unter Verwendung von bildgebenden Nah- und Weitbereichssensoren (Hand- und Stereokamera) Handkamera Greifen des Objektes 10

11 Schlupf- und kraftgeregeltes Greifen Kraftschlüssiges Heben und Tragen von unbekannten glatten und schweren Objekten F F,max = µ F N Kraft-Momenten- Sensoren Linker Arm F N Rechter Arm F G = mg Schlupfsensor 11

12 Schlupf- und kraftgeregeltes Greifen Schlupfsensor Grasp Carrying Placement Vorgegebener Kraftsollwert Adaptierter Kraftsollwert Force [N] Time [sec] 12



13 Schlupf- und kraftgeregeltes Greifen KM-Sensor Schlupfsensor Taktiles Array 13

14 Schlupf- und kraftgeregeltes Greifen 1. Kalibrierung und Reibungsschätzung 2. Stationärer Zustand 3. Störgröße 4. Absetzen 15
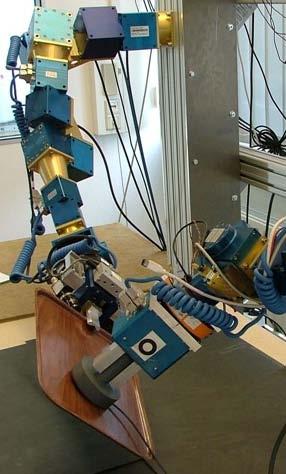
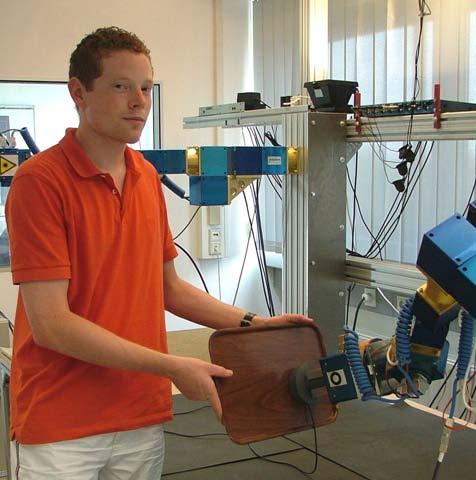
15 Schlupf- und kraftgeregeltes Wischen bewegter Oberflächen 16
16 Schlupf- und kraftgeregeltes Wischen bewegter Oberflächen Bearbeitung eines bewegten Objekts (5cm in x- und y-richtung) Kartesische Trajektorie 6 Trajektorienfehler (dynamischer + Messfehler) x [m] Error [mm] y [m] Zeit [s] Soll-Traj. Modif. Soll-Traj. Ist-Traj. X-Fehler Y-Fehler 17
 Unbekanntes Reibungsmodell Kalman-Filter zur Kompensation der Totzeit Störgrößenbeobachter zur Schätzung der Reibungskoeffizienten")
17 Balancieren instabiler Objekte Messung der Ballposition mittels Stereokamera (Totzeit!) Unbekanntes Reibungsmodell Kalman-Filter zur Kompensation der Totzeit Störgrößenbeobachter zur Schätzung der Reibungskoeffizienten Fuzzy-PD-Regler für ein optimales dynamisches Verhalten 18
18 Balancieren instabiler Objekte Billardkugel 60mm Holzkugel 30mm Ballposition Position [m] [m] Measured Estimated Desired Ballposition [m] Ball Position [m] measured desired Time [s] Zeit [s] Time [s] Zeit [s] 19

19 Balancieren instabiler Objekte 20
20 Zusammenfassung und Ausblick Implementierung unterschiedlicher Grundgeschicklichkeiten auf Basis eines multisensoriellen diskret-kontinuierlichen Überwachungs- und Regelungskonzepts Versuchs- und Entwicklungsplattform ermöglicht die Entkopplung der F&E- Arbeiten von anderen parallel laufenden Teilprojekte Die meisten Grundgeschicklichkeiten erfordern den Einsatz des Oberkörpers (Kopf, Arme, Hände) bei stehendem Unterkörper Einige Grundgeschicklichkeiten müssen auch während der Laufbewegung des Unterkörpers bewältigt werden (z. B. Tragen eines Tabletts) 21
Strukturvariable Regelung eines humanoiden Roboterarmes mit bildgebenden und Kraft-Momenten-Sensoren. Bodmar Diestel-Feddersen, Giulio Milighetti
 mit bildgebenden und Kraft-Momenten-Sensoren Bodmar Diestel-Feddersen, Giulio Milighetti Inhalt 1. Motivation und Aufgabenstellung 2. Multisensorielles Regelungskonzept zum Fallbeispiel Peg-In-Hole 3.
mit bildgebenden und Kraft-Momenten-Sensoren Bodmar Diestel-Feddersen, Giulio Milighetti Inhalt 1. Motivation und Aufgabenstellung 2. Multisensorielles Regelungskonzept zum Fallbeispiel Peg-In-Hole 3.
Diskret-kontinuierliche Regelung und modellbasierte Überwachung von humanoiden Robotern mit Petri-Netzen
 , H.-B. Kuntze - für IITB Karlsruhe, Germany Arne Lehmann, Ralf Mikut Forschungszentrum Karlsruhe (FZK) Germany Seite 1 Motivation Diskret-kontinuierliche Regelung Petri-Netze und Aktionsprimitive Experimentelle
, H.-B. Kuntze - für IITB Karlsruhe, Germany Arne Lehmann, Ralf Mikut Forschungszentrum Karlsruhe (FZK) Germany Seite 1 Motivation Diskret-kontinuierliche Regelung Petri-Netze und Aktionsprimitive Experimentelle
Roboterbasierte Inline-Qualitätsüberwachung mit bildgebenden Sensoren
 Roboterbasierte Inline-Qualitätsüberwachung mit bildgebenden Sensoren Chen-Ko Sung, Dr. Helge-Björn Kuntze, Giulio Milighetti Steuerung und Regelung von Robotern Roboterbasierte Inline-Qualitätsüberwachung
Roboterbasierte Inline-Qualitätsüberwachung mit bildgebenden Sensoren Chen-Ko Sung, Dr. Helge-Björn Kuntze, Giulio Milighetti Steuerung und Regelung von Robotern Roboterbasierte Inline-Qualitätsüberwachung
Entwicklung eines strukturvariablen Neuro-Fuzzy-basierten Regelungskonzeptes für humanoide Roboter
 Entwicklung eines strukturvariablen Neuro-Fuzzy-basierten Regelungskonzeptes für humanoide Roboter Giesen, K.; Frey, C.-W., ; Kuntze, H.-B. - IITB Karlsruhe, Germany Kuntze@iitb.fraunhofer.de page 1 Inhalt
Entwicklung eines strukturvariablen Neuro-Fuzzy-basierten Regelungskonzeptes für humanoide Roboter Giesen, K.; Frey, C.-W., ; Kuntze, H.-B. - IITB Karlsruhe, Germany Kuntze@iitb.fraunhofer.de page 1 Inhalt
Steuerungs- und Regelungskonzepte für eine fluidisch betriebene Roboterhand
 Steuerungs- und Regelungskonzepte für eine fluidisch betriebene Roboterhand Sebastian Beck, Arne Lehmann, Jan Martin, Thomas Lotz, Ralf Mikut Forschungszentrum Karlsruhe, Institut für Angewandte Informatik
Steuerungs- und Regelungskonzepte für eine fluidisch betriebene Roboterhand Sebastian Beck, Arne Lehmann, Jan Martin, Thomas Lotz, Ralf Mikut Forschungszentrum Karlsruhe, Institut für Angewandte Informatik
IDENTIFIKATION DYNAMISCHER ROBOTERPARAMETER
 IDENTIFIKATION DYNAMISCHER ROBOTERPARAMETER Arbeit für 1-2 Personen Modellierung und Ableitung der Identifikationsgleichung für serielle Robotersysteme Elimination linearer Abhängigkeiten Berechnung optimaler
IDENTIFIKATION DYNAMISCHER ROBOTERPARAMETER Arbeit für 1-2 Personen Modellierung und Ableitung der Identifikationsgleichung für serielle Robotersysteme Elimination linearer Abhängigkeiten Berechnung optimaler
Institut für Prozessrechentechnik, Automation und Robotik Bericht zum OpenLab am
 Bericht zum OpenLab am 02.02.2011 Mit dem Open Robot Lab hat das IPR erstmals in diesem Jahr seine Labore für interessierte Studentinnen und Studenten geöffnet. Unter dem Motto Forschung zum Anfassen und
Bericht zum OpenLab am 02.02.2011 Mit dem Open Robot Lab hat das IPR erstmals in diesem Jahr seine Labore für interessierte Studentinnen und Studenten geöffnet. Unter dem Motto Forschung zum Anfassen und
Roboterassistierte Reponierung von Oberschenkelfrakturen
 Roboterassistierte Reponierung von Oberschenkelfrakturen Ralf Westphal 1, Simon Winkelbach 1, Friedrich Wahl 1, Markus Oszwald 2, Thomas Gösling 2, Tobias Hüfner 2, Christian Krettek 2, 1 2 Inhalt Einleitung
Roboterassistierte Reponierung von Oberschenkelfrakturen Ralf Westphal 1, Simon Winkelbach 1, Friedrich Wahl 1, Markus Oszwald 2, Thomas Gösling 2, Tobias Hüfner 2, Christian Krettek 2, 1 2 Inhalt Einleitung
Integration eines pneumatischen Roboters in die Robotics API
 Integration eines pneumatischen Roboters in die Robotics API Ziel: Integration eines AirArms in die Robotics API und Umsetzung eines Demo-Anwendung Idee: Die MRK (Mensch Roboter Kooperation) bekommt zunehmend
Integration eines pneumatischen Roboters in die Robotics API Ziel: Integration eines AirArms in die Robotics API und Umsetzung eines Demo-Anwendung Idee: Die MRK (Mensch Roboter Kooperation) bekommt zunehmend
Flexible Robotersteuerung auf der Basis von Aktionsprimitiven
 Flexible Robotersteuerung auf der Basis von Aktionsprimitiven Dr. Technische Universität Braunschweig Gliederung Einführung Aktionsprimitive Steuerungs- und Regelungstechnische Umsetzung des Aktionsprimitivkonzepts
Flexible Robotersteuerung auf der Basis von Aktionsprimitiven Dr. Technische Universität Braunschweig Gliederung Einführung Aktionsprimitive Steuerungs- und Regelungstechnische Umsetzung des Aktionsprimitivkonzepts
Simulation als epistemologische Grundlage für intelligente Roboter
 1 Simulation als epistemologische Grundlage für intelligente Roboter Andreas Tolk The MITRE Corporation Umut Durak Deutsches Zentrum für Luft- und Raumfahrt e.v. (DLR) Public Release No. 17-0085 2017 The
1 Simulation als epistemologische Grundlage für intelligente Roboter Andreas Tolk The MITRE Corporation Umut Durak Deutsches Zentrum für Luft- und Raumfahrt e.v. (DLR) Public Release No. 17-0085 2017 The
Flexible diskret-kontinuierliche Überwachung und Regelung humanoider Roboter
 Methoden at 1/2013 Flexible diskret-kontinuierliche Überwachung und Regelung humanoider Roboter Flexible Discrete-Continuous Supervisory Control for Humanoid Robots Giulio Milighetti, KUKA Laboratories
Methoden at 1/2013 Flexible diskret-kontinuierliche Überwachung und Regelung humanoider Roboter Flexible Discrete-Continuous Supervisory Control for Humanoid Robots Giulio Milighetti, KUKA Laboratories
Grundlagen der Objektmodellierung
 Grundlagen der Objektmodellierung Daniel Göhring 30.10.2006 Gliederung Grundlagen der Wahrscheinlichkeitsrechnung Begriffe zur Umweltmodellierung Bayesfilter Zusammenfassung Grundlagen der Wahrscheinlichkeitsrechnung
Grundlagen der Objektmodellierung Daniel Göhring 30.10.2006 Gliederung Grundlagen der Wahrscheinlichkeitsrechnung Begriffe zur Umweltmodellierung Bayesfilter Zusammenfassung Grundlagen der Wahrscheinlichkeitsrechnung
Systemkonzept eines modularen HiL-Systems für modellbasierte Funktionsentwicklung fahrzeugmechatronischer Systeme
 Systemkonzept eines modularen HiL-Systems für modellbasierte Funktionsentwicklung fahrzeugmechatronischer Systeme Workshop der ASIM/GI-Fachgruppen, 09./10.03.2017, Ulm Prof. Dr.-Ing. X. Liu-Henke M.Eng.
Systemkonzept eines modularen HiL-Systems für modellbasierte Funktionsentwicklung fahrzeugmechatronischer Systeme Workshop der ASIM/GI-Fachgruppen, 09./10.03.2017, Ulm Prof. Dr.-Ing. X. Liu-Henke M.Eng.
Seminar Bildauswertung und -fusion. Themenbeschreibung
 Seminar Bildauswertung und -fusion Themenbeschreibung 1 Übersicht Zeichenerkennung mit "Smart Cameras" im industriellen Umfeld Betreuer: Dipl.-Ing. Martin Grafmüller Entropieberechnungen in Bayes schen
Seminar Bildauswertung und -fusion Themenbeschreibung 1 Übersicht Zeichenerkennung mit "Smart Cameras" im industriellen Umfeld Betreuer: Dipl.-Ing. Martin Grafmüller Entropieberechnungen in Bayes schen
Regelungs-und Steuerungstechnik
 Modul: Labor und Statistik OPTIMIERUNG M.SC.KRUBAJINI KRISHNAPILLAI; PROF.DR.ROBBY ANDERSSON Regelungs-und Steuerungstechnik Optimierung Regelungs-und Steuerungstechnik Inhaltsverzeichnis Einleitung Grundlagen
Modul: Labor und Statistik OPTIMIERUNG M.SC.KRUBAJINI KRISHNAPILLAI; PROF.DR.ROBBY ANDERSSON Regelungs-und Steuerungstechnik Optimierung Regelungs-und Steuerungstechnik Inhaltsverzeichnis Einleitung Grundlagen
Regelungs-und Steuerungstechnik
 Modul: Labor und Statistik OPTIMIERUNG M.SC.KRUBAJINI KRISHNAPILLAI; PROF.DR.ROBBY ANDERSSON Regelungs-und Steuerungstechnik Inhaltsverzeichnis Einleitung Grundlagen Beschreibung dynamischer Systeme Regelkreis
Modul: Labor und Statistik OPTIMIERUNG M.SC.KRUBAJINI KRISHNAPILLAI; PROF.DR.ROBBY ANDERSSON Regelungs-und Steuerungstechnik Inhaltsverzeichnis Einleitung Grundlagen Beschreibung dynamischer Systeme Regelkreis
Portabler Leichtbauroboter
 Portabler Leichtbauroboter Starke Argumente. Vielfältige Möglichkeiten. Gesamtgewicht nur 5,7 kg Einfache Installation Kraftvoll Wetterbeständig Kohlefaserstruktur Geringer Energieverbrauch Geräuscharm
Portabler Leichtbauroboter Starke Argumente. Vielfältige Möglichkeiten. Gesamtgewicht nur 5,7 kg Einfache Installation Kraftvoll Wetterbeständig Kohlefaserstruktur Geringer Energieverbrauch Geräuscharm
Humanoid Robot. Robotik A Thi Dieu Thu Ngo Mktnr: Humanoid Robot 1
 Humanoid Robot Robotik A Thi Dieu Thu Ngo Mktnr: 200522194 15.01.2008 Humanoid Robot 1 Agenda 1. Begriffe 2. Geschichte 3. Anwendungsbereiche 4. Forschung und Entwicklung 5. Kommerzielle Projekte: ASIMO
Humanoid Robot Robotik A Thi Dieu Thu Ngo Mktnr: 200522194 15.01.2008 Humanoid Robot 1 Agenda 1. Begriffe 2. Geschichte 3. Anwendungsbereiche 4. Forschung und Entwicklung 5. Kommerzielle Projekte: ASIMO
Untersuchungen zur flexiblen Steuerung von Service-Robotern
 Prof. Dr.-Ing. Matthias Seitz Institut für Automatisierungssysteme Fachbereich Elektrotechnik Untersuchungen zur flexiblen Steuerung von Service-Robotern 1. Anforderungen an Service-Roboter 2. Vorteile
Prof. Dr.-Ing. Matthias Seitz Institut für Automatisierungssysteme Fachbereich Elektrotechnik Untersuchungen zur flexiblen Steuerung von Service-Robotern 1. Anforderungen an Service-Roboter 2. Vorteile
Ein Beitrag zur Modellierung und Regelung nichtlinearer dynamischer Systeme mittels neuronaler Strukturen. Knut Voigtländer.
 Technische Universität Dresden Ein Beitrag zur Modellierung und Regelung nichtlinearer dynamischer Systeme mittels neuronaler Strukturen Knut Voigtländer von der Fakultät Elektrotechnik der Technischen
Technische Universität Dresden Ein Beitrag zur Modellierung und Regelung nichtlinearer dynamischer Systeme mittels neuronaler Strukturen Knut Voigtländer von der Fakultät Elektrotechnik der Technischen
Fortgeschrittenenpraktikum Inverses Pendel
 Fortgeschrittenenpraktikum Inverses Pendel Johannes Vogt, Stefan Richter Robotiklabor an der Universität Heidelberg Übersicht Team und Betreuer Aufgabenstellung Theoretische Modellierung des physikalischen
Fortgeschrittenenpraktikum Inverses Pendel Johannes Vogt, Stefan Richter Robotiklabor an der Universität Heidelberg Übersicht Team und Betreuer Aufgabenstellung Theoretische Modellierung des physikalischen
ERKENNUNG UND MANIPULATION VON OBJEKTEN IM EINZELHANDEL UND LOGISTIK
 ERKENNUNG UND MANIPULATION VON OBJEKTEN IM EINZELHANDEL UND LOGISTIK Joshua Hampp, Fraunhofer IPA, Stuttgart joshua.hampp@ipa.fraunhofer.de Einleitung Care-O-bot: Eine Produktvision eines mobilen Serviceroboters
ERKENNUNG UND MANIPULATION VON OBJEKTEN IM EINZELHANDEL UND LOGISTIK Joshua Hampp, Fraunhofer IPA, Stuttgart joshua.hampp@ipa.fraunhofer.de Einleitung Care-O-bot: Eine Produktvision eines mobilen Serviceroboters




Automatisierte und vernetzte Mobilität am Beispiel satelliten- und luftgestützter Karten
 Automatisierte und vernetzte Mobilität am Beispiel satelliten- und luftgestützter Karten Tagung Raumfahrt bewegt Bonn, 27.3.2017 Peter Reinartz Earth Observation Center DLR Fernerkundung für Verkehrsanwendungen
Automatisierte und vernetzte Mobilität am Beispiel satelliten- und luftgestützter Karten Tagung Raumfahrt bewegt Bonn, 27.3.2017 Peter Reinartz Earth Observation Center DLR Fernerkundung für Verkehrsanwendungen
RatSLAM. Torben Becker. 24. Mai HAW Hamburg
 HAW Hamburg 24. Mai 2012 Gliederung 1 Motivation 2 3 Aussicht 2 / 21 Motivation Warum SLAM? Navigation Umgebungskartografie Feststellung der Position innerhalb eines Geländes ohne Funksignale Keine vorherige
HAW Hamburg 24. Mai 2012 Gliederung 1 Motivation 2 3 Aussicht 2 / 21 Motivation Warum SLAM? Navigation Umgebungskartografie Feststellung der Position innerhalb eines Geländes ohne Funksignale Keine vorherige
AUTONOMES KREISELSTABILISIERTES FAHRRAD
 AUTONOMES KREISELSTABILISIERTES FAHRRAD Adaption der Hardware Leistungselektronik Anordnung der Kreisel Messung der Radwinkel für Geschwindigkeitsregelung Optischer Aufputz System Adde Modellbildung Fahrrad
AUTONOMES KREISELSTABILISIERTES FAHRRAD Adaption der Hardware Leistungselektronik Anordnung der Kreisel Messung der Radwinkel für Geschwindigkeitsregelung Optischer Aufputz System Adde Modellbildung Fahrrad
Höhenregelung eines schwebenden Magneten
 Technische Universität Berlin MRT M R T Prof. Dr.-Ing. R. King Fakultät III Institut für Prozess- und Anlagentechnik Fachgebiet Mess- und Regelungstechnik TU Berlin. Sekretariat. P2-1. Mess- und Regelungstechnik
Technische Universität Berlin MRT M R T Prof. Dr.-Ing. R. King Fakultät III Institut für Prozess- und Anlagentechnik Fachgebiet Mess- und Regelungstechnik TU Berlin. Sekretariat. P2-1. Mess- und Regelungstechnik
Hindernisumfahrung eines autonomen Roboters in einer unbekannten statischen Umgebung. Ronny Menzel
 Hindernisumfahrung eines autonomen Roboters in einer unbekannten statischen Umgebung. Ronny Menzel Inhalt Aufgabenstellung Begriffserklärung Hindernisumfahrungsstrategien Anforderungen an die Hindernisumfahrung
Hindernisumfahrung eines autonomen Roboters in einer unbekannten statischen Umgebung. Ronny Menzel Inhalt Aufgabenstellung Begriffserklärung Hindernisumfahrungsstrategien Anforderungen an die Hindernisumfahrung
Qualitätssicherung beim Spritzgießen Regelung von Prozessgrößen zur Steigerung der Qualitätskonstanz
 Qualitätssicherung beim Spritzgießen Regelung von Prozessgrößen zur Steigerung der Qualitätskonstanz Dipl.-Ing. Andreas Schreiber Institut für Kunststoffverarbeitung an der RWTH Aachen 24. April 2009 Gliederung
Qualitätssicherung beim Spritzgießen Regelung von Prozessgrößen zur Steigerung der Qualitätskonstanz Dipl.-Ing. Andreas Schreiber Institut für Kunststoffverarbeitung an der RWTH Aachen 24. April 2009 Gliederung
School of Engineering Institut für Mechatronische Systeme (IMS)
") School of Engineering Institut für Mechatronische Systeme (IMS) Zürcher Fachhochschule www.ims.zhaw.ch Forschung & Entwicklung Institut für Mechatronische Systeme (IMS) Mechatronik bringt die Disziplinen
School of Engineering Institut für Mechatronische Systeme (IMS) Zürcher Fachhochschule www.ims.zhaw.ch Forschung & Entwicklung Institut für Mechatronische Systeme (IMS) Mechatronik bringt die Disziplinen
Lokalisierungsverfahren für drahtlose Sensornetzwerke
 Lokalisierungsverfahren für drahtlose Sensornetzwerke Prof. Dr. Fachhochschule Forschungsschwerpunkt: Mobile Business Mobile Systems Lokalisierungsverfahren für drahtlose Sensornetzwerke Inhalt Drahtlose
Lokalisierungsverfahren für drahtlose Sensornetzwerke Prof. Dr. Fachhochschule Forschungsschwerpunkt: Mobile Business Mobile Systems Lokalisierungsverfahren für drahtlose Sensornetzwerke Inhalt Drahtlose
Prof. J. Zhang Universität Hamburg. AB Technische Aspekte Multimodaler Systeme. 6. Januar 2005
 zhang@informatik.uni-hamburg.de Universität Hamburg AB Technische Aspekte Multimodaler Systeme zhang@informatik.uni-hamburg.de Inhaltsverzeichnis 7. Roboterregelung..........................370 Klassifikation
zhang@informatik.uni-hamburg.de Universität Hamburg AB Technische Aspekte Multimodaler Systeme zhang@informatik.uni-hamburg.de Inhaltsverzeichnis 7. Roboterregelung..........................370 Klassifikation
Serientaugliche quadratisch optimale Regelung für
 TECHNISCHE UNIVERSITÄT MÜNCHEN Lehrstuhl für Regelungstechnik Serientaugliche quadratisch optimale Regelung für semiaktive Pkw-Fahrwerke Andreas F. Unger Vollständiger Abdruck der von der Fakultät für
TECHNISCHE UNIVERSITÄT MÜNCHEN Lehrstuhl für Regelungstechnik Serientaugliche quadratisch optimale Regelung für semiaktive Pkw-Fahrwerke Andreas F. Unger Vollständiger Abdruck der von der Fakultät für
Einsatzmöglichkeiten und Ergebnisse neuer, intelligenter Regelungsverfahren auf Kläranlagen
 6. IFWW Fach- Kolloquium Einsatzmöglichkeiten und Ergebnisse neuer, intelligenter Regelungsverfahren auf Kläranlagen Prof. Dr. Lothar Scheuer Aggerverband Gummersbach Prof. Dr. Michael Bongards Fachhochschule
6. IFWW Fach- Kolloquium Einsatzmöglichkeiten und Ergebnisse neuer, intelligenter Regelungsverfahren auf Kläranlagen Prof. Dr. Lothar Scheuer Aggerverband Gummersbach Prof. Dr. Michael Bongards Fachhochschule
Einführung in die Robotik. Jianwei Zhang
 - Jianwei Zhang zhang@informatik.uni-hamburg.de Fakultät für Mathematik, Informatik und Naturwissenschaften Technische Aspekte Multimodaler Systeme 7. Juni 2011 J. Zhang 272 Roboterregelung Gliederung
- Jianwei Zhang zhang@informatik.uni-hamburg.de Fakultät für Mathematik, Informatik und Naturwissenschaften Technische Aspekte Multimodaler Systeme 7. Juni 2011 J. Zhang 272 Roboterregelung Gliederung
Künstliche Intelligenz
 Künstliche Intelligenz RoboCup Soccer CGM Abschlusspräsentation - Team Blau - Christopher Gundlach Elmar Bernecker Florian Nagel Michael Vlatten Marc Schwede Inhalt Einleitung Umsetzung in Unity3D Implementierung
Künstliche Intelligenz RoboCup Soccer CGM Abschlusspräsentation - Team Blau - Christopher Gundlach Elmar Bernecker Florian Nagel Michael Vlatten Marc Schwede Inhalt Einleitung Umsetzung in Unity3D Implementierung
Gliederung. Gliederung (cont.) Klassifikation der Regelung von Roboterarmen
 Klassifikation der Regelung von Roboterarmen") - Roboterregelung Gliederung Jianwei Zhang zhang@informatik.uni-hamburg.de Fakultät für Mathematik, Informatik und Naturwissenschaften Technische Aspekte Multimodaler Systeme 19. Juni 2012 Allgemeine Informationen
- Roboterregelung Gliederung Jianwei Zhang zhang@informatik.uni-hamburg.de Fakultät für Mathematik, Informatik und Naturwissenschaften Technische Aspekte Multimodaler Systeme 19. Juni 2012 Allgemeine Informationen
(1) Problemstellung. (2) Kalman Filter
 Problemstellung. (2) Kalman Filter") Inhaltsverzeichnis (1) Problemstellung...2 (2) Kalman Filter...2 Funktionsweise... 2 Gleichungen im mehrdimensionalen Fall...3 Schätzung des Systemzustands...3 Vermuteter Schätzfehler... 3 Aktualisierung
Inhaltsverzeichnis (1) Problemstellung...2 (2) Kalman Filter...2 Funktionsweise... 2 Gleichungen im mehrdimensionalen Fall...3 Schätzung des Systemzustands...3 Vermuteter Schätzfehler... 3 Aktualisierung
Differenzierung von Robotern in Industrie und Service - Probleme der Robotik bei mobilen Systemen -
 Differenzierung von Robotern in Industrie und Service - Probleme der Robotik bei mobilen Systemen - Christoph Schmiedecke Studiendepartment Informatik Hochschule für Angewandte Wissenschaften Hamburg 16.
Differenzierung von Robotern in Industrie und Service - Probleme der Robotik bei mobilen Systemen - Christoph Schmiedecke Studiendepartment Informatik Hochschule für Angewandte Wissenschaften Hamburg 16.
Projektpraktikum: Bildauswertung und fusion Wintersemester 2013 / 2014
 Projektpraktikum: Bildauswertung und fusion Wintersemester 2013 / 2014 ies.anthropomatik.kit.edu Bildvergleich mittels Image Warping Themenbeschreibung: Zur Bildklassifikation oder Bildsuche können Image
Projektpraktikum: Bildauswertung und fusion Wintersemester 2013 / 2014 ies.anthropomatik.kit.edu Bildvergleich mittels Image Warping Themenbeschreibung: Zur Bildklassifikation oder Bildsuche können Image
Seminar im Grundstudium: Motion-Tracking in der Robotik
 Seminar im Grundstudium SS2007 Seminar im Grundstudium: Motion-Tracking in der Robotik Lehrstuhl für Hardware-Software-Co-Design Universität Erlangen-Nürnberg stefan.wildermann@informatik.uni-erlangen.de
Seminar im Grundstudium SS2007 Seminar im Grundstudium: Motion-Tracking in der Robotik Lehrstuhl für Hardware-Software-Co-Design Universität Erlangen-Nürnberg stefan.wildermann@informatik.uni-erlangen.de
von feinkörnigem Bauabfall zu funktionalen Baumaterialien und Bauteilen BVL-Tagung»Bau-Supply-Chain 4.0?«Jan-Philip Kopka M. Sc. Leimen, 30.
 von feinkörnigem Bauabfall zu funktionalen Baumaterialien und Bauteilen BVL-Tagung»Bau-Supply-Chain 4.0?«Jan-Philip Kopka M. Sc. Leimen, 30. Juni 2016 ein Fraunhofer-Verbundprojekt Das BauCycle-Konsortium
von feinkörnigem Bauabfall zu funktionalen Baumaterialien und Bauteilen BVL-Tagung»Bau-Supply-Chain 4.0?«Jan-Philip Kopka M. Sc. Leimen, 30. Juni 2016 ein Fraunhofer-Verbundprojekt Das BauCycle-Konsortium
H2 1862 mm. H1 1861 mm
 1747 mm 4157 mm H2 1862 mm H1 1861 mm L1 4418 mm L2 4818 mm H2 2280-2389 mm H1 1922-2020 mm L1 4972 mm L2 5339 mm H3 2670-2789 mm H2 2477-2550 mm L2 5531 mm L3 5981 mm L4 6704 mm H1 2176-2219 mm L1 5205
1747 mm 4157 mm H2 1862 mm H1 1861 mm L1 4418 mm L2 4818 mm H2 2280-2389 mm H1 1922-2020 mm L1 4972 mm L2 5339 mm H3 2670-2789 mm H2 2477-2550 mm L2 5531 mm L3 5981 mm L4 6704 mm H1 2176-2219 mm L1 5205
Beschleunigte Entwicklung und Prüfung von BMS durch Einsatz einer HIL-Umgebung
 Beschleunigte Entwicklung und Prüfung von BMS durch Einsatz einer HIL-Umgebung CAE-Forum Hannover Messe 2017 Dipl.-Wirtsch.-Ing. C. Kettenring Dipl.-Ing. M. Puchta Dr. rer. nat. M. Schwalm Hardware in
Beschleunigte Entwicklung und Prüfung von BMS durch Einsatz einer HIL-Umgebung CAE-Forum Hannover Messe 2017 Dipl.-Wirtsch.-Ing. C. Kettenring Dipl.-Ing. M. Puchta Dr. rer. nat. M. Schwalm Hardware in
Lokalisierung und Topologiekontrolle
 Lokalisierung und Topologiekontrolle Seminar: Kommunikation in drahtlosen Sensornetzwerken Martin Schmidt Einführung Lokalisierung: Für viele Informationen ist die Position wichtig Traditionelle Technik
Lokalisierung und Topologiekontrolle Seminar: Kommunikation in drahtlosen Sensornetzwerken Martin Schmidt Einführung Lokalisierung: Für viele Informationen ist die Position wichtig Traditionelle Technik
Rolland. Niels Schütte Hristo Gurdzhanov. 1 Vorstellung 2 Gliederung 3 Forschung 4 Rolland 1 5 Rolland 2. 6 Obstacle Map 7 Rolland 3 8 Projekte
 Rolland Niels Schütte Gliederung Forschung Rolland 1 Rolland 2 ObstacleMap Rolland 3 Projekte Probleme Finanzierung Forschung Navigation/Raumkognition Sichere Systeme Rolland 1 Kamera Jede Menge Sensoren
Rolland Niels Schütte Gliederung Forschung Rolland 1 Rolland 2 ObstacleMap Rolland 3 Projekte Probleme Finanzierung Forschung Navigation/Raumkognition Sichere Systeme Rolland 1 Kamera Jede Menge Sensoren
Mobile Robotik KMR QUANTEC
 Mobile Robotik KMR QUANTEC DE KMR QUANTEC Eine neue Dimension der Robotik mit bewährter KUKA Qualität Er arbeitet hochpräzise mit aktuellsten KR QUANTEC Konsolrobotern und der bewährten KUKA Steuerung
Mobile Robotik KMR QUANTEC DE KMR QUANTEC Eine neue Dimension der Robotik mit bewährter KUKA Qualität Er arbeitet hochpräzise mit aktuellsten KR QUANTEC Konsolrobotern und der bewährten KUKA Steuerung
Ein Datenmodell zur Beschreibung der Fähigkeiten heterogener Robotersysteme
 GI Fachgruppe Betriebssysteme - Frühjahrstreffen 2015 Ein Datenmodell zur Beschreibung der Fähigkeiten heterogener Robotersysteme Christine Barth Masterstudentin an der Professur Betriebssysteme Einsatzgebiete
GI Fachgruppe Betriebssysteme - Frühjahrstreffen 2015 Ein Datenmodell zur Beschreibung der Fähigkeiten heterogener Robotersysteme Christine Barth Masterstudentin an der Professur Betriebssysteme Einsatzgebiete
genehmigte Abhandlung vorgelegt von
 Steuerung und Regelung des Freikolbenlineargenerators - Entwicklungsmethode und Regelungskonzept neuartigen Energiewandlers für den Betrieb eines Von der Fakultät Konstruktions-, Produktions- und Fahrzeugtechnik
Steuerung und Regelung des Freikolbenlineargenerators - Entwicklungsmethode und Regelungskonzept neuartigen Energiewandlers für den Betrieb eines Von der Fakultät Konstruktions-, Produktions- und Fahrzeugtechnik
Prof. Dr. Tatjana Lange
 Prof. Dr. Tatjana Lange Lehrgebiet: Regelungstechnik Laborübung 1: Thema: Einführrung in die digitale Regelung Übungsziele Veranschaulichung der Abtastung von bandbegrenzten Signalen und der Reproduktion
Prof. Dr. Tatjana Lange Lehrgebiet: Regelungstechnik Laborübung 1: Thema: Einführrung in die digitale Regelung Übungsziele Veranschaulichung der Abtastung von bandbegrenzten Signalen und der Reproduktion
IuK-Projekt. Angebote für Arbeiten ab dem Wintersemester 2013/2014
 IuK-Projekt Angebote für Arbeiten ab dem Wintersemester 2013/2014 (Betreuung: Prof. Dr.-Ing. Felderhoff) 1 Audioverarbeitung Digitale Signal- und Bildverarbeitung Medizintechnik Bedienkonzepte Fachhochschule
IuK-Projekt Angebote für Arbeiten ab dem Wintersemester 2013/2014 (Betreuung: Prof. Dr.-Ing. Felderhoff) 1 Audioverarbeitung Digitale Signal- und Bildverarbeitung Medizintechnik Bedienkonzepte Fachhochschule
3D-Sensoren auf PMD-Basis zur Objekterkennung und -verfolgung
 3D-Sensoren auf PMD-Basis zur Objekterkennung und -verfolgung Dipl.-Phys. Hartmut Eigenbrod 10 Jahre Fraunhofer-Allianz Vision Erlangen, 26. Oktober 2007 1 Gliederung Laufzeitkameras und ihre Vor- und
3D-Sensoren auf PMD-Basis zur Objekterkennung und -verfolgung Dipl.-Phys. Hartmut Eigenbrod 10 Jahre Fraunhofer-Allianz Vision Erlangen, 26. Oktober 2007 1 Gliederung Laufzeitkameras und ihre Vor- und
Entwurf, Test und Analyse adaptiver Regelungsstrategien für einen nichtlinearen totzeitbehafteten technischen Prozess
 Fakultät Informatik Institut für angewandte Informatik- Professur Technische Informationssysteme Verteidigung der Diplomarbeit: Entwurf, Test und Analyse adaptiver Regelungsstrategien für einen nichtlinearen
Fakultät Informatik Institut für angewandte Informatik- Professur Technische Informationssysteme Verteidigung der Diplomarbeit: Entwurf, Test und Analyse adaptiver Regelungsstrategien für einen nichtlinearen
MoveIt Setup Assistent
 MoveIt Software für die Anwendungsentwicklung an Robotern Benutzerfreundliche Gestaltung der Interfaces Flexible Anpassung und Erweiterung duch Plugin Interfaces Über Parameterserver leicht Konfigurierbar
MoveIt Software für die Anwendungsentwicklung an Robotern Benutzerfreundliche Gestaltung der Interfaces Flexible Anpassung und Erweiterung duch Plugin Interfaces Über Parameterserver leicht Konfigurierbar
Infrarotdeflektometrie zur Untersuchung diffus spiegelnder Oberflächen
 Infrarotdeflektometrie zur Untersuchung diffus spiegelnder Oberflächen Michael Heizmann Stefan Werling Fraunhofer-Institut für Optronik, Systemtechnik und Bildauswertung IOSB Ettlingen Karlsruhe Ilmenau
Infrarotdeflektometrie zur Untersuchung diffus spiegelnder Oberflächen Michael Heizmann Stefan Werling Fraunhofer-Institut für Optronik, Systemtechnik und Bildauswertung IOSB Ettlingen Karlsruhe Ilmenau
Künstliche Intelligenz
 Künstliche Intelligenz Abschlusspräsentation Gruppe: Blau_KI1112 1 Team Blau_KI1112 Harjin Esmael Jochen Hansch Nils Hühn Felix Marx Nikolai Warkentin Alexander Wecker 2 Inhalt Aufgabenstellung Arbeitsumgebung
Künstliche Intelligenz Abschlusspräsentation Gruppe: Blau_KI1112 1 Team Blau_KI1112 Harjin Esmael Jochen Hansch Nils Hühn Felix Marx Nikolai Warkentin Alexander Wecker 2 Inhalt Aufgabenstellung Arbeitsumgebung
 2 3 4 5 6 7 8 9 10 12,999,976 km 9,136,765 km 1,276,765 km 499,892 km 245,066 km 112,907 km 36,765 km 24,159 km 7899 km 2408 km 76 km 12 14 16 1 12 7 3 1 6 2 5 4 3 11 9 10 8 18 20 21 22 23 24 25 26 28
2 3 4 5 6 7 8 9 10 12,999,976 km 9,136,765 km 1,276,765 km 499,892 km 245,066 km 112,907 km 36,765 km 24,159 km 7899 km 2408 km 76 km 12 14 16 1 12 7 3 1 6 2 5 4 3 11 9 10 8 18 20 21 22 23 24 25 26 28
Sturzvermeidung von zweibeinigen Robotern durch reflexartige Reaktionen
 Sturzvermeidung von zweibeinigen Robotern durch reflexartige Reaktionen Oliver Höhn Appelstr. 11, 30167 Hannover http://www.irt.uni-hannover.de Page: 2 Gliederung Motivation Falluntersuchungen Sensorik
Sturzvermeidung von zweibeinigen Robotern durch reflexartige Reaktionen Oliver Höhn Appelstr. 11, 30167 Hannover http://www.irt.uni-hannover.de Page: 2 Gliederung Motivation Falluntersuchungen Sensorik
Der diskrete Kalman Filter
 Der diskrete Kalman Filter Fachbereich: Informatik Betreuer: Marc Drassler Patrick Winkler 1168954 6. Dezember 2004 Technische Universität Darmstadt Simulation und Systemoptimierung Darmstadt Dribbling
Der diskrete Kalman Filter Fachbereich: Informatik Betreuer: Marc Drassler Patrick Winkler 1168954 6. Dezember 2004 Technische Universität Darmstadt Simulation und Systemoptimierung Darmstadt Dribbling
Mensch-Maschine-Interaktion via taktiler Sensorik
 Mensch-Maschine-Interaktion via taktier Sensorik Thomas.Woesch@mchp.siemens.de Motivation Zie: Mobier Manipuator as Assistent in Atagsumgebungen imensch und Maschine arbeiten im geichen Arbeitsraum ieventuee
Mensch-Maschine-Interaktion via taktier Sensorik Thomas.Woesch@mchp.siemens.de Motivation Zie: Mobier Manipuator as Assistent in Atagsumgebungen imensch und Maschine arbeiten im geichen Arbeitsraum ieventuee
Einstieg in die Regelungstechnik
 Hans-Werner Philippsen Einstieg in die Regelungstechnik Vorgehensmodell für den praktischen Reglerentwurf mit 263 Bildern und 17 Tabellen Fachbuchverlag Leipzig im Carl Hanser Verlag 1 Einführung 13 1.1
Hans-Werner Philippsen Einstieg in die Regelungstechnik Vorgehensmodell für den praktischen Reglerentwurf mit 263 Bildern und 17 Tabellen Fachbuchverlag Leipzig im Carl Hanser Verlag 1 Einführung 13 1.1
Vorlesung: Angewandte Sensorik
 zhang@informatik.uni-hamburg.de Universität Hamburg AB Technische Aspekte Multimodaler Systeme zhang@informatik.uni-hamburg.de Inhaltsverzeichnis Kraft-Moment-Sensoren (KMS)....................165 KMS-Kalibrierung..........................177
zhang@informatik.uni-hamburg.de Universität Hamburg AB Technische Aspekte Multimodaler Systeme zhang@informatik.uni-hamburg.de Inhaltsverzeichnis Kraft-Moment-Sensoren (KMS)....................165 KMS-Kalibrierung..........................177
Taktilsensorbasierte Steuerung von Roboterarmen zur Erstellung einer Haptischen Datenbank
 Taktilsensorbasierte Steuerung von Roboterarmen zur Erstellung einer Haptischen Datenbank Matthias Schöpfer 1 Gunther Heidemann 2 Helge Ritter 1 1 {mschoepf,helge}@techfak.uni-bielefeld.de Technische Fakultät
Taktilsensorbasierte Steuerung von Roboterarmen zur Erstellung einer Haptischen Datenbank Matthias Schöpfer 1 Gunther Heidemann 2 Helge Ritter 1 1 {mschoepf,helge}@techfak.uni-bielefeld.de Technische Fakultät
Teach-In für die 3D-Scan Akquise mit einem Roboter. Teach-In für die 3D-Scanakquise mit einem mobilen Roboter
 Teach-In für die 3D-Scan Akquise mit einem Roboter DoritStruckmeier, Borrmann Dorit Oldenburger 2017 Oliver Borrmann,3D-Tage Andreas Nüchter 1 Zielsetzung der Arbeit Ein mobiler Roboter fährt einen angelernten
Teach-In für die 3D-Scan Akquise mit einem Roboter DoritStruckmeier, Borrmann Dorit Oldenburger 2017 Oliver Borrmann,3D-Tage Andreas Nüchter 1 Zielsetzung der Arbeit Ein mobiler Roboter fährt einen angelernten
Messtechnik VO, Mi, 16:15-17:45, HS i9. Axel Pinz. Axel Pinz SS 2017 Messtechnik 2 1
 Messtechnik 2 438.013 2 VO, Mi, 16:15-17:45, HS i9 Axel Pinz 1 Curriculum Bachelor, Pflicht: Messtechnik 1 Messtechnik 2 vorwiegend elektrische Größen nichtelektrische Größen, Schwerpunkt: optische/bildgestützte
Messtechnik 2 438.013 2 VO, Mi, 16:15-17:45, HS i9 Axel Pinz 1 Curriculum Bachelor, Pflicht: Messtechnik 1 Messtechnik 2 vorwiegend elektrische Größen nichtelektrische Größen, Schwerpunkt: optische/bildgestützte
Projektgruppe DynOLog. Informatik 7 & 12 sowie IRPA und IML Frank Weichert. Pascal Libuschewski. Adrian Schyja. Andreas Kamagaew
 Projektgruppe DynOLog Dynamische Detektion von Objekten im Kontext von logistischen Anwendungsfällen Informatik 7 & 12 sowie IRPA und IML Frank Weichert Email: frank.weichert@tu-dortmund.de Pascal Libuschewski
Projektgruppe DynOLog Dynamische Detektion von Objekten im Kontext von logistischen Anwendungsfällen Informatik 7 & 12 sowie IRPA und IML Frank Weichert Email: frank.weichert@tu-dortmund.de Pascal Libuschewski
BauCycle: Zukunft des Bauschuttrecyclings hin zu hochwertigen Baumaterialien
 BauCycle: Zukunft des Bauschuttrecyclings hin zu hochwertigen Baumaterialien Jan-Philip Kopka M.Sc., Dipl.-Ing. Joseph W. Dörmann 10. Mai 2017 InnovationCenter»Baustoffrecycling II«der Recycling-Technik
BauCycle: Zukunft des Bauschuttrecyclings hin zu hochwertigen Baumaterialien Jan-Philip Kopka M.Sc., Dipl.-Ing. Joseph W. Dörmann 10. Mai 2017 InnovationCenter»Baustoffrecycling II«der Recycling-Technik
Greif- und Taskplanung für Humanoide Roboter mit mehrfingrigen Händen
 Greif- und Taskplanung für Humanoide Roboter mit mehrfingrigen Händen Christoph Borst, Franziska Zacharias Institut für Robotik und Mechatronik - DLR Oberpfaffenhofen Folie 1 Motivation: Autonomes Manipulieren
Greif- und Taskplanung für Humanoide Roboter mit mehrfingrigen Händen Christoph Borst, Franziska Zacharias Institut für Robotik und Mechatronik - DLR Oberpfaffenhofen Folie 1 Motivation: Autonomes Manipulieren
Lokalisierung. von Matthias Heine, Norbert Müller, Silvia Schreier, Oliver Zöllner
 Lokalisierung von Matthias Heine, Norbert Müller, Silvia Schreier, Oliver Zöllner Was ist Lokalisierung? Fähigkeit eines autonomen Roboters seine Position in Bezug auf ein festes (Koordinaten-)System zu
Lokalisierung von Matthias Heine, Norbert Müller, Silvia Schreier, Oliver Zöllner Was ist Lokalisierung? Fähigkeit eines autonomen Roboters seine Position in Bezug auf ein festes (Koordinaten-)System zu
Intelligente EKG-Analyse Dipl.-Ing. Gero von Wagner
 FZI Forschungszentrum Informatik an der Universität Karlsruhe MIT- Medizinische Informationstechnik Telemetrisches Diagnosenetz Intelligente EKG-Analyse Dipl.-Ing. Gero von Wagner FZI Forschungszentrum
FZI Forschungszentrum Informatik an der Universität Karlsruhe MIT- Medizinische Informationstechnik Telemetrisches Diagnosenetz Intelligente EKG-Analyse Dipl.-Ing. Gero von Wagner FZI Forschungszentrum
Regelung eines inversen Pendels
 Regelung eines inversen Pendels Dr.-Ing. Michael Buchholz 29.10.2010 Institut für Mess-, Regel- und Mikrotechnik NI Dozenten- und Ausbildertag 2010 Fürstenfeldbruck Seite 2 Anwendungsgebiete in der Forschung
Regelung eines inversen Pendels Dr.-Ing. Michael Buchholz 29.10.2010 Institut für Mess-, Regel- und Mikrotechnik NI Dozenten- und Ausbildertag 2010 Fürstenfeldbruck Seite 2 Anwendungsgebiete in der Forschung
MATLAB im Studium. Analyse niederfrequenter Magnetfeldsignale in eingebetteten Algorithmen. Claudia Beyß. Datum:
 MATLAB im Studium Analyse niederfrequenter Magnetfeldsignale in eingebetteten Algorithmen Datum: 16.10.2014 Claudia Beyß MATLAB in Höhere Regelungstechnik MATLAB in Sensortechnik & Datenverarbeitung MATLAB
MATLAB im Studium Analyse niederfrequenter Magnetfeldsignale in eingebetteten Algorithmen Datum: 16.10.2014 Claudia Beyß MATLAB in Höhere Regelungstechnik MATLAB in Sensortechnik & Datenverarbeitung MATLAB
2. Tagung Aktive Sicherheit durch Fahrerassistenz April 2006, TU-München, Garching
 2. Tagung Aktive Sicherheit durch Fahrerassistenz 4.-5. April 2006, TU-München, Garching Aktive Fahrerunterstützung durch Störgrößenkompensation mittels Steer by Wire im Nutzfahrzeug Active drivers support
2. Tagung Aktive Sicherheit durch Fahrerassistenz 4.-5. April 2006, TU-München, Garching Aktive Fahrerunterstützung durch Störgrößenkompensation mittels Steer by Wire im Nutzfahrzeug Active drivers support
SIMERO: Erzeugung von flüssigen und schnellen Roboterbewegungen
 SIMERO: Erzeugung von flüssigen und schnellen Roboterbewegungen AG Eingebettete Systeme und Robotik (RESY),, http://resy.informatik.uni-kl.de/ 1. Motivation 2. Stand der Forschung 3. Kontrollflusskonzepte
SIMERO: Erzeugung von flüssigen und schnellen Roboterbewegungen AG Eingebettete Systeme und Robotik (RESY),, http://resy.informatik.uni-kl.de/ 1. Motivation 2. Stand der Forschung 3. Kontrollflusskonzepte
PRODUKTIONSMESSTECHNIK UND QUALITÄTSMANAGEMENT - MESSUNG DER QUALITÄT - QUALITÄT DER MESSUNG. TU-Wien
 PRODUKTIONSMESSTECHNIK UND QUALITÄTSMANAGEMENT - MESSUNG DER QUALITÄT - QUALITÄT DER MESSUNG Prof. Dr. P. H. Osanna, Prof. Dr. N. M. Durakbasa, Dr. techn. L. Kräuter TU-Wien Mai 2007 Einführung Die Forschung
PRODUKTIONSMESSTECHNIK UND QUALITÄTSMANAGEMENT - MESSUNG DER QUALITÄT - QUALITÄT DER MESSUNG Prof. Dr. P. H. Osanna, Prof. Dr. N. M. Durakbasa, Dr. techn. L. Kräuter TU-Wien Mai 2007 Einführung Die Forschung
Das Bayerische Kompetenznetzwerk für Mechatronik
 2002 BKM Das Bayerische Vortrag auf der Fachtagung Mechatronik in Kronach Dr.-Ing. P. Ross Gliederung des Vortrages Definition von Mechatronik Wirtschaftliche Bedeutung der Mechatronik Das Bayerische Concurrent
2002 BKM Das Bayerische Vortrag auf der Fachtagung Mechatronik in Kronach Dr.-Ing. P. Ross Gliederung des Vortrages Definition von Mechatronik Wirtschaftliche Bedeutung der Mechatronik Das Bayerische Concurrent
Standardisierung der Planung und Regelung von hydraulischen TGA- Systemen. Jens Teichmann. wissenschaftlicher Mitarbeiter, RWTH Aachen University
 Fachverband Gebäude-Klima e. V. Standardisierung der Planung und Regelung von hydraulischen TGA- Systemen, wissenschaftlicher Mitarbeiter, RWTH Aachen University Berlin, 14./15. April 2016 Modularisierung
Fachverband Gebäude-Klima e. V. Standardisierung der Planung und Regelung von hydraulischen TGA- Systemen, wissenschaftlicher Mitarbeiter, RWTH Aachen University Berlin, 14./15. April 2016 Modularisierung
Kalmanfiter (1) Typische Situation für den Einsatz von Kalman-Filtern
 Typische Situation für den Einsatz von Kalman-Filtern") Kalmanfiter (1) Typische Situation für den Einsatz von Kalman-Filtern Vorlesung Robotik SS 016 Kalmanfiter () Kalman-Filter: optimaler rekursiver Datenverarbeitungsalgorithmus optimal hängt vom gewählten
Kalmanfiter (1) Typische Situation für den Einsatz von Kalman-Filtern Vorlesung Robotik SS 016 Kalmanfiter () Kalman-Filter: optimaler rekursiver Datenverarbeitungsalgorithmus optimal hängt vom gewählten
Verkehr Analyse. Inhalt. Was ist Verkehr Analyse? Geschichte der Verkehr Analyse. Iavor Jelev Jintao Ding
 Inhalt Verkehr Analyse Iavor Jelev Jintao Ding Was ist Verkehr Analyse? Wozu ist die Verkehr Analyse gut? Wie kann man Verkehr Analyse machen? Anwendungsbeispiele Algorithmen für Verkehr Analyse Geschichte
Inhalt Verkehr Analyse Iavor Jelev Jintao Ding Was ist Verkehr Analyse? Wozu ist die Verkehr Analyse gut? Wie kann man Verkehr Analyse machen? Anwendungsbeispiele Algorithmen für Verkehr Analyse Geschichte
Multiagentensimulation im Verkehr: Eignet sich die Multiagentensimulation zur Abbildung der Verhaltensstruktur im Verkehr?
 Multiagentensimulation im Verkehr: Eignet sich die Multiagentensimulation zur Abbildung der Verhaltensstruktur im Verkehr? Oliver Prinz Betreuer: Patrik Jochem Ausgewählte technische, rechtliche und ökonomische
Multiagentensimulation im Verkehr: Eignet sich die Multiagentensimulation zur Abbildung der Verhaltensstruktur im Verkehr? Oliver Prinz Betreuer: Patrik Jochem Ausgewählte technische, rechtliche und ökonomische
Modell-Programmierte Roboter Regelung. Univ.-Prof. Dr. Michael Hofbaur Institut für Automatisierungs- und Regelungstechnik, UMIT, Hall i.
 Modell-Programmierte Roboter Regelung Univ.-Prof. Dr. Michael Hofbaur Institut für Automatisierungs- und Regelungstechnik, UMIT, Hall i. Tirol Motivation: Automatisierung komplexer Systeme komplexe technische
Modell-Programmierte Roboter Regelung Univ.-Prof. Dr. Michael Hofbaur Institut für Automatisierungs- und Regelungstechnik, UMIT, Hall i. Tirol Motivation: Automatisierung komplexer Systeme komplexe technische
Annährungssensoren. Induktive Sensoren. Kapazitive Sensoren. Ultraschall-Sensoren. Optische Anährungssensoren
 Annährungssensoren Zum Feststellen der Existenz eines Objektes innerhalb eines bestimmten Abstands. In der Robotik werden sie für die Nah-Gebiets-Arbeit, Objekt-Greifen oder Kollisionsvermeidung verwendet.
Annährungssensoren Zum Feststellen der Existenz eines Objektes innerhalb eines bestimmten Abstands. In der Robotik werden sie für die Nah-Gebiets-Arbeit, Objekt-Greifen oder Kollisionsvermeidung verwendet.
Giulio Milighetti. Multisensorielle diskret-kontinuierliche Überwachung und Regelung humanoider Roboter
 Giulio Milighetti Multisensorielle diskret-kontinuierliche Überwachung und Regelung humanoider Roboter Karlsruher Schriften zur Anthropomatik Band 6 Herausgeber: Prof. Dr.-Ing. Jürgen Beyerer Lehrstuhl
Giulio Milighetti Multisensorielle diskret-kontinuierliche Überwachung und Regelung humanoider Roboter Karlsruher Schriften zur Anthropomatik Band 6 Herausgeber: Prof. Dr.-Ing. Jürgen Beyerer Lehrstuhl
Hardware-in-the-Loop-Lösungen für die Automation von HLK-Prozessen und die Raumautomation
 10. Nachwuchswissenschaftler Konferenz 16. April 2009, Merseburg Hardware-in-the-Loop-Lösungen für die Automation von HLK-Prozessen und die Raumautomation Alexander Adlhoch Hochschule Biberach Institut
10. Nachwuchswissenschaftler Konferenz 16. April 2009, Merseburg Hardware-in-the-Loop-Lösungen für die Automation von HLK-Prozessen und die Raumautomation Alexander Adlhoch Hochschule Biberach Institut
Wie die Bionik der Robotik hilft
 Wie die Bionik der Robotik hilft Dr. Reinhard Pittschellis Festo Didacic GmbH&Co. KG Denkendorf pitt@de.festo.com Festo Didactic Weltmarktführer für Lernsysteme Mechatronik Automatisierungstechnik Produktion
Wie die Bionik der Robotik hilft Dr. Reinhard Pittschellis Festo Didacic GmbH&Co. KG Denkendorf pitt@de.festo.com Festo Didactic Weltmarktführer für Lernsysteme Mechatronik Automatisierungstechnik Produktion
ONYX -MCE MEHRKANAL- GLASFASER-PYROMETER MIT AKTIVER EMISSIONSGRADKORREKTUR PRÄZISE TEMPERATURMESSUNG FÜR ANSPRUCHSVOLLE INDUSTRIEANWENDUNGEN
 ONYX -MCE MEHRKANAL- GLASFASER-PYROMETER MIT AKTIVER EMISSIONSGRADKORREKTUR PRÄZISE TEMPERATURMESSUNG FÜR ANSPRUCHSVOLLE INDUSTRIEANWENDUNGEN Genaue, reproduzierbare und zuverlässige Temperaturmessung
ONYX -MCE MEHRKANAL- GLASFASER-PYROMETER MIT AKTIVER EMISSIONSGRADKORREKTUR PRÄZISE TEMPERATURMESSUNG FÜR ANSPRUCHSVOLLE INDUSTRIEANWENDUNGEN Genaue, reproduzierbare und zuverlässige Temperaturmessung
Vergleichende Untersuchungen zum Einsatz
 ISSN 0178-0980 ISBN 3-9810255-6-3 ISBN 978-3-9810255-6-9 Schriftenreihe Siedlungswasserwirtschaft Bochum 60 Vergleichende Untersuchungen zum Einsatz von Mess-, Steuer- und Regeitechnik auf Kläranlagen
ISSN 0178-0980 ISBN 3-9810255-6-3 ISBN 978-3-9810255-6-9 Schriftenreihe Siedlungswasserwirtschaft Bochum 60 Vergleichende Untersuchungen zum Einsatz von Mess-, Steuer- und Regeitechnik auf Kläranlagen
Autonome Mobilität - Was wir von biologischen Systemen lernen können. Georg Färber Realzeit Computer - Systeme Technische Universität München
 Autonome Mobilität - Was wir von biologischen Systemen lernen können Georg Färber Realzeit Computer - Systeme Technische Universität München Autonome Mobilität Lernen von der Biologie Merkmals- Erkennung
Autonome Mobilität - Was wir von biologischen Systemen lernen können Georg Färber Realzeit Computer - Systeme Technische Universität München Autonome Mobilität Lernen von der Biologie Merkmals- Erkennung
Steuerungsarchitekturen für Stand-Alone-Robotersysteme
 tand-alone-systeme eminar Robotik W 04/05 Torsten Ehli nhalt 1. Allgemeine Anforderungen an 2. Klassische Zerlegung 3. Ansatz von Brooks: Ebenenentwicklung 4. Beschreibung der Ebenen 5. Weiterentwicklungen
tand-alone-systeme eminar Robotik W 04/05 Torsten Ehli nhalt 1. Allgemeine Anforderungen an 2. Klassische Zerlegung 3. Ansatz von Brooks: Ebenenentwicklung 4. Beschreibung der Ebenen 5. Weiterentwicklungen
Physikalisch-Technische Bundesanstalt
 Physikalisch-Technische Bundesanstalt Mechanik und Akustik PTB-MA-77 Braunschweig, Januar 2006 Oliver Mack Verhalten piezoelektrischer Kraftaufnehmer unter Wirkung mechanischer Einflussgrößen Von der Fakultät
Physikalisch-Technische Bundesanstalt Mechanik und Akustik PTB-MA-77 Braunschweig, Januar 2006 Oliver Mack Verhalten piezoelektrischer Kraftaufnehmer unter Wirkung mechanischer Einflussgrößen Von der Fakultät
FRAUNHOFER-INSTITUT FÜR. Antriebssysteme und Exoskelette
 FRAUNHOFER-INSTITUT FÜR Produktionstechnik und Automatisierung IPA Antriebssysteme und Exoskelette MOTIVATION ANGEBOT Mobilität ist eines der Grundbedürfnisse des Menschen und gerät durch den voranschreitenden
FRAUNHOFER-INSTITUT FÜR Produktionstechnik und Automatisierung IPA Antriebssysteme und Exoskelette MOTIVATION ANGEBOT Mobilität ist eines der Grundbedürfnisse des Menschen und gerät durch den voranschreitenden
FRAUNHOFER-INSTITUT FÜR PRODUKTIONSTECHNIK UND AUTOMATISIERUNG IPA ANTRIEBSSYSTEME UND EXOSKELETTE
 FRAUNHOFER-INSTITUT FÜR PRODUKTIONSTECHNIK UND AUTOMATISIERUNG IPA ANTRIEBSSYSTEME UND EXOSKELETTE MOTIVATION Mobilität ist eines der Grundbedürfnisse des Menschen und gerät durch den voranschreitenden
FRAUNHOFER-INSTITUT FÜR PRODUKTIONSTECHNIK UND AUTOMATISIERUNG IPA ANTRIEBSSYSTEME UND EXOSKELETTE MOTIVATION Mobilität ist eines der Grundbedürfnisse des Menschen und gerät durch den voranschreitenden
Industrieroboter. Methoden der Steuerung und Regelung. Bearbeitet von Wolfgang Weber
 Industrieroboter Methoden der Steuerung und Regelung Bearbeitet von Wolfgang Weber 1. Auflage 2002. Taschenbuch. 220 S. Paperback ISBN 978 3 446 21604 4 Format (B x L): 16 x 22,8 cm Gewicht: 403 g Weitere
Industrieroboter Methoden der Steuerung und Regelung Bearbeitet von Wolfgang Weber 1. Auflage 2002. Taschenbuch. 220 S. Paperback ISBN 978 3 446 21604 4 Format (B x L): 16 x 22,8 cm Gewicht: 403 g Weitere
Datenfusionsverfahren für die automatische Erfassung des Rollverkehrs auf Flughäfen. Christoph Meier. Institut für Flugführung Braunschweig
 Deutsches Zentrum für Luft- und Raumfahrt e.v. Forschungsbericht 98-32 Datenfusionsverfahren für die automatische Erfassung des Rollverkehrs auf Flughäfen Christoph Meier Institut für Flugführung Braunschweig
Deutsches Zentrum für Luft- und Raumfahrt e.v. Forschungsbericht 98-32 Datenfusionsverfahren für die automatische Erfassung des Rollverkehrs auf Flughäfen Christoph Meier Institut für Flugführung Braunschweig
Aufbau und Kalibrierung einer redundant angetriebenen Parallelkinematik
 Modellierung Aufbau und Kalibrierung einer redundant angetriebenen Parallelkinematik Ziel: Entwicklung eines Prototypen einer PKM mit redundanten Antrieben Bewegungsgleichungen in Minimalkoordinaten (Gelenkraum,
Modellierung Aufbau und Kalibrierung einer redundant angetriebenen Parallelkinematik Ziel: Entwicklung eines Prototypen einer PKM mit redundanten Antrieben Bewegungsgleichungen in Minimalkoordinaten (Gelenkraum,
Grundlagen der Sportpädagogik (WS 2004/05) Dietrich Kurz Universität Bielefeld Abteilung Sportwissenschaft
 Dietrich Kurz Universität Bielefeld Abteilung Sportwissenschaft") Grundlagen der Sportpädagogik (WS 2004/05) Grundlagen der Sportpädagogik (WS 2004/05) Lektion 8: Eindruck ( Wahrnehmungsfähigkeit verbessern, Bewegungserfahrungen erweitern ) Grundlagen der Sportpädagogik
Grundlagen der Sportpädagogik (WS 2004/05) Grundlagen der Sportpädagogik (WS 2004/05) Lektion 8: Eindruck ( Wahrnehmungsfähigkeit verbessern, Bewegungserfahrungen erweitern ) Grundlagen der Sportpädagogik