Algorithmen für Routenplanung 12. Sitzung, Sommersemester 2011 Reinhard Bauer, Thomas Pajor 6. Juni 2011
|
|
|
- Britta Baumhauer
- vor 6 Jahren
- Abrufe
Transkript

1 Algorithmen für Routenplanung 12. Sitzung, Sommersemester 2011 Reinhard Bauer, Thomas Pajor 6. Juni 2011 INSTITUT FÜR THEORETISCHE INFORMATIK ALGORITHMIK I PROF. DR. DOROTHEA WAGNER KIT Universität des Landes Baden-Württemberg und nationales Großforschungszentrum in der Helmholtz-Gemeinschaft
2 Kombinationen
3 Fünf Bausteine Landmarken Bidirektionale Suche s t Kontraktion Arc-Flags access node Table- Lookups s t distances between access node transit nodes
4 Landmarken [Goldberg, Harrelson 05] Vorberechnung: wähle eine Hand voll ( 16) Knoten als Landmarken berechne Abstände von und zu allen Landmarken Anfrage: benutze Landmarken und Dreiecksungleichung um eine untere Schranke für den Abstand zum Ziel zu bestimmen verändert Reihenfolge der besuchten Knoten bevorzugt Knoten zwischen Start- und Zielknoten bekannt als ALT: A, Landmarken, Triangle Inequality
5 Landmarken Vorteile: + Anpassung einfach + einfache und schnelle Vorberechnung + sehr robust gegenüber der Eingabe + zusätzliche Staus können berücksichtigt werden Nachteile: geringe Beschleunigung ( nur Faktor von ca. 100) dies auch nur mit bidirektionaler Suche erreichbar Vorberechnung benötigt viel Speicher (2 Distanzen pro Knoten und Landmarke)
6 Bidirektionale Suche s t starte zweite Suche von t relaxiere rückwärts nur eingehende Kanten stoppe die Suche, wenn beide Suchräume sich treffen
7 Kontraktion [Sanders,Schultes 05] Beobachtung: Knoten mit niedrigem Grad sind unwichtig Knoten-Reduktion: entferne diese Knoten iterativ füge neue Kanten (Abkürzungen) hinzu, um die Abstände zwischen verbleibenden Knoten zu erhalten Kanten-Reduktion: behalte nur relevante Shortcuts lokale Suche während oder nach Knoten-reduktion
8 Kontraktion [Sanders,Schultes 05] Beobachtung: Knoten mit niedrigem Grad sind unwichtig Knoten-Reduktion: entferne diese Knoten iterativ füge neue Kanten (Abkürzungen) hinzu, um die Abstände zwischen verbleibenden Knoten zu erhalten Kanten-Reduktion: behalte nur relevante Shortcuts lokale Suche während oder nach Knoten-reduktion
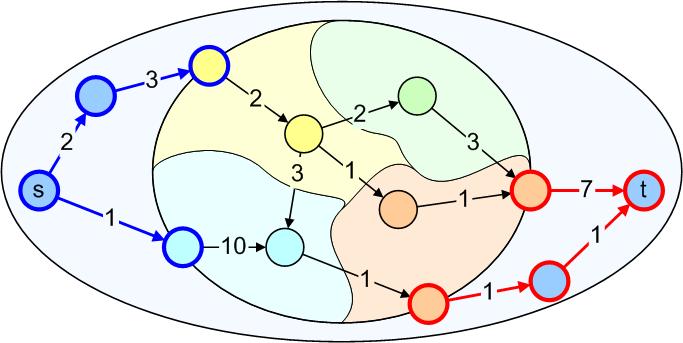
9 Arc-Flags [Lauther04],[Möhring et al. 05,06] Idee: partitioniere den Graph in k Zellen hänge ein Label mit k Bits an jede Kante zeigt ob e wichtig für die Zielzelle ist modifizierter Dijkstra überspringt unwichtige Kanten Diskussion: + einfacher Suchalgorithmus + schnell lange Vorberechnungszeit keine Vorteile in Zielzelle
10 Table-Lookups Idee: speichere Distanztabellen nur für wichtige Teile des Graphen Suchen laufen nur bis zur Tabelle harmoniert gut mir hierarchischen Techniken access node s t distances between transit nodes access node
11 Core-ALT Landmarken Bidirektionale Suche Kontraktion Arc-Flags Table- Lookups s a a t
12 Core-ALT Motivation: ALT ist robust gegenüber der Eingabe aber hoher Speicherverbrauch Hauptidee: beschränke ALT nur im Kern
13 Core-ALT (Landmarken, bidirektionale Suche, Kontraktion) Idee begrenze Beschleunigungstechnik auf kleinen Subgraphen (Kern) s t Vorberechnung kontrahiere Graphen zu einem Kern Landmarken nur im Kern Anfrage Initialphase: normaler Dijkstra benutze Landmarken nur im Kern
14 Core-ALT (Landmarken, bidirektionale Suche, Kontraktion) Idee begrenze Beschleunigungstechnik auf kleinen Subgraphen (Kern) s t Vorberechnung kontrahiere Graphen zu einem Kern Landmarken nur im Kern Anfrage Initialphase: normaler Dijkstra benutze Landmarken nur im Kern
15 Core-ALT (Landmarken, bidirektionale Suche, Kontraktion) Idee begrenze Beschleunigungstechnik auf kleinen Subgraphen (Kern) s t Vorberechnung kontrahiere Graphen zu einem Kern Landmarken nur im Kern Anfrage Initialphase: normaler Dijkstra benutze Landmarken nur im Kern
16 Proxy Knoten Problem: ALT braucht Potential von jedem Knoten zu t und s s und/oder t könnten außerhalb des Kerns liegen somit keine Abstandswerte von den Landmarken zu s und t Lösung: bestimme Proxy-Knoten t für t (s analog), t im Kern neue Ungleichungen: d(u, t) d(u, l 2 ) d(t, l 2 ) d(t, t ) d(u, t) d(l 1, t ) d(l 1, u) d(t, t )
17 Proxy Knoten Problem: ALT braucht Potential von jedem Knoten zu t und s s und/oder t könnten außerhalb des Kerns liegen somit keine Abstandswerte von den Landmarken zu s und t Lösung: bestimme Proxy-Knoten t für t (s analog), t im Kern neue Ungleichungen: d(u, t) d(u, l 2 ) d(t, l 2 ) d(t, t ) d(u, t) d(l 1, t ) d(l 1, u) d(t, t ) l 1 l 2 u t t
18 Einfluss Kontraktion PREPRO. QUERY core E time space #settled #entry time input c h nodes incr. [min] [B/n] nodes nodes [ms] % 0.00% % 10.23% % 14.24% Europe % 11.41% % 9.16% % 7.80% % 6.94% % 0.00% % 11.40% % 12.68% USA % 10.53% % 8.00% % 6.39% % 4.50%
19 Einfluss Anzahl Landmarken no cont. (c=0.0, h=0) low cont. (c=1.0, h=20) PREPRO. QUERY PREPRO. QUERY time space #settled time time space #settled time L [min] [B/n] nodes [ms] [min] [B/n] nodes [ms] med: c=2.5, h=50 high: c=5.0, h=100 PREPRO. QUERY PREPRO. QUERY time space #settled time time space #settled time L [min] [B/n] nodes [ms] [min] [B/n] nodes [ms]
20 Lokale Anfragen Dijkstra Rank Query Time [ms] ALT (16 landmarks) CALT low contraction (64 landmarks) CALT medium contraction (64 landmarks)
21 SHARC Landmarken Bidirektionale Suche Kontraktion Arc-Flags Table- Lookups a a a
22 SHARC Motivation: unidirektional Vorberechnungszeiten von Arc-Flags reduzieren Ideen: Multi-Level Arc-Flags Integration von Kontraktion Verfeinern von Flaggen
23 Integration von Kontraktion Idee: sub-optimale flaggen für entfernte Kanten in die Komponente, nur own-cell Flagge sonst volle Flaggen Vorberechnung nur auf kontrahierten Graph sub-optimale Flaggen nur am Anfang und Ende der Query Überspringen von Kanten automatisch durch Arc-Flags Query
24 Integration von Kontraktion Idee: sub-optimale flaggen für entfernte Kanten in die Komponente, nur own-cell Flagge sonst volle Flaggen Vorberechnung nur auf kontrahierten Graph sub-optimale Flaggen nur am Anfang und Ende der Query Überspringen von Kanten automatisch durch Arc-Flags Query
25 Integration von Kontraktion Idee: sub-optimale flaggen für entfernte Kanten in die Komponente, nur own-cell Flagge sonst volle Flaggen Vorberechnung nur auf kontrahierten Graph sub-optimale Flaggen nur am Anfang und Ende der Query Überspringen von Kanten automatisch durch Arc-Flags Query
26 SHARC (Kontraktion, Arc-Flags) Vorberechnung: Multi-Level-Partition iterativer Prozess: kontrahiere Subgraphen berechne Flaggen Anfragen: unidirektional hierarchisch (Kontraktion) zielgerichtet (Arc-Flags)
27 SHARC (Kontraktion, Arc-Flags) Vorberechnung: Multi-Level-Partition iterativer Prozess: kontrahiere Subgraphen berechne Flaggen Anfragen: unidirektional hierarchisch (Kontraktion) zielgerichtet (Arc-Flags)
28 SHARC (Kontraktion, Arc-Flags) Vorberechnung: Multi-Level-Partition iterativer Prozess: kontrahiere Subgraphen berechne Flaggen Anfragen: unidirektional hierarchisch (Kontraktion) zielgerichtet (Arc-Flags)
29 SHARC (Kontraktion, Arc-Flags) Vorberechnung: Multi-Level-Partition iterativer Prozess: kontrahiere Subgraphen berechne Flaggen Anfragen: unidirektional hierarchisch (Kontraktion) zielgerichtet (Arc-Flags)
30 SHARC (Kontraktion, Arc-Flags) Vorberechnung: Multi-Level-Partition iterativer Prozess: kontrahiere Subgraphen berechne Flaggen Anfragen: unidirektional hierarchisch (Kontraktion) zielgerichtet (Arc-Flags)
31 SHARC (Kontraktion, Arc-Flags) Vorberechnung: Multi-Level-Partition iterativer Prozess: kontrahiere Subgraphen berechne Flaggen Anfragen: unidirektional hierarchisch (Kontraktion) zielgerichtet (Arc-Flags)
32 SHARC (Kontraktion, Arc-Flags) Vorberechnung: Multi-Level-Partition iterativer Prozess: kontrahiere Subgraphen berechne Flaggen Anfragen: unidirektional hierarchisch (Kontraktion) zielgerichtet (Arc-Flags)
33 SHARC (Kontraktion, Arc-Flags) Vorberechnung: Multi-Level-Partition iterativer Prozess: kontrahiere Subgraphen berechne Flaggen Anfragen: unidirektional hierarchisch (Kontraktion) zielgerichtet (Arc-Flags)
34 SHARC (Kontraktion, Arc-Flags) Vorberechnung: Multi-Level-Partition iterativer Prozess: kontrahiere Subgraphen berechne Flaggen Anfragen: unidirektional hierarchisch (Kontraktion) zielgerichtet (Arc-Flags)
35 SHARC (Kontraktion, Arc-Flags) Vorberechnung: Multi-Level-Partition iterativer Prozess: kontrahiere Subgraphen berechne Flaggen Anfragen: unidirektional hierarchisch (Kontraktion) zielgerichtet (Arc-Flags)
36 Verfeinerung Beobachtung: Flaggen schlechter als nötig geht es besser? Idee: 0011 verfeinere Flaggen propagiere Flaggen von wichtigen zu unwichtigen Kanten mittels lokaler Suche sehr gute Flaggen
37 Verfeinerung Beobachtung: Flaggen schlechter als nötig geht es besser? Idee: 0011 verfeinere Flaggen propagiere Flaggen von wichtigen zu unwichtigen Kanten mittels lokaler Suche sehr gute Flaggen
38 Partielle Flaggen Partielle Flaggenberechnung: Flaggen auf unteren Leveln unwichtig nur wenige werden am Ende relaxiert setze einfach alle Flaggen auf 1 offensichtlich korrekt Partielle Verfeinerung: Berechne exakte Flaggen nur auf hohen Leveln dadurch zu Beginn einer Anfrage schlechte Flaggen Verfeinerung für niedrigere Level wichtiger als Flaggenberechnung
39 Kompression Beobachtung: Shortcut entspricht einem Pfad manche Shortcuts erscheinen unwichtig Idee: entferne (manche) Shortcuts nach Vorberechnung vererbe Flaggen an erste Kante des Pfades Extremfall: entferne alle Shortcuts
40 Kompression Beobachtung: Shortcut entspricht einem Pfad manche Shortcuts erscheinen unwichtig Idee: entferne (manche) Shortcuts nach Vorberechnung vererbe Flaggen an erste Kante des Pfades Extremfall: entferne alle Shortcuts
41 PARTITION PREPRO QUERY #cells per level #nodes time space #settled #rel. time l 0 l 1 l 2 l 3 l 4 l 5 l 6 l 7 #total cells per cell [h:m] [B/n] nodes edges [µs] : : : : : : : : : : : : : : : : : : : : : : : : :
42 Einfluss Kontraktion Beobachtung: PREPRO QUERY time space #settled #relaxed time c [h:m] [B/n] nodes edges [µs] 1.0 1: : : : : Einfluss der Kontraktion begrenzt
43 Einfluss Flaggenberechnung ARC-FLAGS PREPRO QUERY core refinement time space #settled #relaxed time levels levels [h:m] [B/n] nodes edges [µs] - - 0: : : : : : : : : : : : : : : : : Beobachtung: partielle Berechnung reicht aus Verfeinerung wichtiger als Berechnung Ungenauigkeit am Ende der Anfrage eher verzeihbar als am Anfang (Suchraum fächert sich auf)
44 stripped SHARC SHARC stripped SHARC PREPRO QUERY PREPRO QUERY time space #settled time time space #settled time c [h:m] [B/n] nodes [ms] [h:m] [B/n] nodes [ms] : : : : : : Beobachtung: volles Entfernen nur bei niedriger Kontraktion
45 Zufallsanfragen Europe USA PREPRO QUERY PREPRO QUERY time space #settled time.0 time space #settled time.0 [h:m] [B/n] nodes [µs].0 [h:m] [B/n] nodes [µs].0 generous SHARC 1: : economical SHARC 0: : stripped SHARC 7: : bidirectional SHARC 2: :
46 Lokale Anfragen Dijkstra Rank Query Time [ms] generous SHARC economical SHARC bidirectional SHARC
47 CHASE Landmarken Bidirektionale Suche Kontraktion Arc-Flags Table- Lookups s a a t
48 CHASE Motivation: CHs sind ungerichtet weitere Beschleunigung von CH durch zielgerichtetes Verfahren Hauptideen: Flaggen auf Suchgraphen berechnen nur auf oberen Teil der Hierarchie
49 Erster Ansatz Vorberechnung: CH-Vorberechnung partitioniere Suchgraphen berechne Flaggen für Suchgraphen Anfragen: normale CH-query mit Flaggen pruning Problem: mehr Randknoten durch Shortcuts sehr lange Vorberechnungszeit
50 Partielle Flaggen Vorberechnung: extrahiere Graphen H mit k wichtigsten Knoten führe Vorberechnung für H aus 2-Phasen Anfragen: 1 normale CH-query 2 CH + Flaggen query
51 Beispiel
52 Beispiel
53 Beispiel
54 Beispiel
55 Beispiel
56 Beispiel
57 Beispiel
58 Beispiel
59 Beispiel
60 Beispiel
61 Beispiel
62 CHASE: CH+Arc-flagS size of Arc-Flags 0% 0.5% 1% 2% 5% 10% 20% Prepro. [h:m] 0:25 0:32 0:41 1:02 1:39 4:04 8:56 [B/n] Query # settled time [µs] Beobachtungen: zusätzliche 7 Minuten Vorberechnung zusätzlicher speedup von 4.1 (economical variant) eine Stunde speedup von 10.4 mehr al 5% lohnen sich nicht
63 Vergleich Preprocessing Query [h:m] [B/n] #settled [µs] Contraction Hierarchies 0: bidirectional Arc-Flags 17: Transit-Node Routing 1: N/A 3.4 bidirectional SHARC 3: REAL-(64,16) 2: eco. CHASE 0: gen. CHASE 1: Beobachtung: CHASE fast so schnell wie TNR aber weniger Vorberechnungsaufwand
64 Lokale Anfragen Dijkstra Rank Query Time [µs] pure CH eco CHASE gen CHASE
65 Lokale Anfragen Dijkstra Rank Query Time [µs] contraction hierarchies ch + edge flags transit node routing
66 TNR+AF Landmarken Bidirektionale Suche Kontraktion Arc-Flags Table- Lookups a s t a access node s t distances between access node transit nodes
67 TNR + Arc-Flags Beobachtung: Idee: Table-Lookups in Distanztabelle dauern lange partitioniere Graphen induziert von Transit-Knoten berechne welche Transit-Knoten für welche Regionen wichtig sind 0001 region x 4321 fs,u(x) 0011 fs = s t 1010 ft = Anfragen: evaluiere nur Tabelleneinträge mit gesetzter Flagge
68 Ergebnisse Preprocessing Query [h:m] [B/n] #settled [µs] bidirectional Arc-Flags 17: Transit-Node Routing 1: N/A 3.4 gen. CHASE 1: Goal-Directed TNR 3: N/A 1.9 Beobachtung: milder speedup gegenüber puren TNR aber: > 3 Mio. mal schneller als Dijkstra
69 Zusammenfassung Kombinationen Basismodule: bidirektionale Suche landmarken reach arc-flags Kontraktion Table-Lookups beste Kombinationen: hierarchisch + zielgerichtet CH + Arc-Flags sehr effizient TNR + Arc-Flags schnellstes Verfahren: < 2 µs Anfragezeit
70 Ende Literatur (SHARC und Kombinationen): Reinhard Bauer and Daniel Delling: SHARC: Fast and Robust Unidirectional Routing In: ACM Journal of Experimental Algorithmics, 14:2.4, Reinhard Bauer, Daniel Delling, Peter Sanders, Dennis Schieferdecker, Dominik Schultes, and Dorothea Wagner: Combining Hierarchical and Goal-Directed Speed-Up Techniques for Dijkstra s Algorithm In: ACM Journal of Experimental Algorithmics, 15:2.3, 2010.
Algorithmen für Routenplanung Vorlesung 10
 Algorithmen für Routenplanung Vorlesung 10 Daniel Delling 1/ 42 Letztes Mal: Zeitabhängige Netzwerke (Basics) Szenario: Historische Daten für Verkehrssituation verfügbar Verkehrssituation vorhersagbar
Algorithmen für Routenplanung Vorlesung 10 Daniel Delling 1/ 42 Letztes Mal: Zeitabhängige Netzwerke (Basics) Szenario: Historische Daten für Verkehrssituation verfügbar Verkehrssituation vorhersagbar
Algorithmen für Routenplanung 2. Vorlesung, Sommersemester 2014 Andreas Gemsa 20. April 2014
 Algorithmen für Routenplanung 2. Vorlesung, Sommersemester 2014 Andreas Gemsa 20. April 2014 INSTITUT FÜR THEORETISCHE INFORMATIK ALGORITHMIK PROF. DR. DOROTHEA WAGNER KIT Universität des Landes Baden-Württemberg
Algorithmen für Routenplanung 2. Vorlesung, Sommersemester 2014 Andreas Gemsa 20. April 2014 INSTITUT FÜR THEORETISCHE INFORMATIK ALGORITHMIK PROF. DR. DOROTHEA WAGNER KIT Universität des Landes Baden-Württemberg
Algorithmen für Routenplanung 15. Vorlesung, Sommersemester 2012 Daniel Delling 20. Juni 2012
 Algorithmen für Routenplanung 15. Vorlesung, Sommersemester 2012 Daniel Delling 20. Juni 2012 MICROSOFT RESEARCH SILICON VALLEY KIT Universität des Landes Baden-Württemberg und nationales Großforschungszentrum
Algorithmen für Routenplanung 15. Vorlesung, Sommersemester 2012 Daniel Delling 20. Juni 2012 MICROSOFT RESEARCH SILICON VALLEY KIT Universität des Landes Baden-Württemberg und nationales Großforschungszentrum
Schnelle und genaue Routenplanung
 Sanders/Schultes: Routenplanung 1 Schnelle und genaue Routenplanung Peter Sanders Dominik Schultes Institut für Theoretische Informatik Algorithmik II Universität Karlsruhe Uni für Einsteiger, 22. November
Sanders/Schultes: Routenplanung 1 Schnelle und genaue Routenplanung Peter Sanders Dominik Schultes Institut für Theoretische Informatik Algorithmik II Universität Karlsruhe Uni für Einsteiger, 22. November
Fortgeschrittene Routenplanung. Transportnetzen. Advanced Route Planning in Transportation Networks
 Fortgeschrittene Routenplanung in Transportnetzen Advanced Route Planning in Transportation Networks Dissertationsvortrag von Dipl.-Inform. Robert Geisberger 1 KIT Robert Universität Geisberger: des Landes
Fortgeschrittene Routenplanung in Transportnetzen Advanced Route Planning in Transportation Networks Dissertationsvortrag von Dipl.-Inform. Robert Geisberger 1 KIT Robert Universität Geisberger: des Landes
Algorithmen für Routenplanung
 Algorithmen für Routenplanung Letzte Sitzung, Sommersemester 2010 Thomas Pajor 09. Juli 2010 I NSTITUT FÜR T HEORETISCHE I NFORMATIK A LGORITHMIK I P ROF. D R. D OROTHEA WAGNER KIT University of the State
Algorithmen für Routenplanung Letzte Sitzung, Sommersemester 2010 Thomas Pajor 09. Juli 2010 I NSTITUT FÜR T HEORETISCHE I NFORMATIK A LGORITHMIK I P ROF. D R. D OROTHEA WAGNER KIT University of the State
Genauer Hochleistungs-Routenplaner
 Sanders/Schultes: Routenplanung 1 Genauer Hochleistungs-Routenplaner Prof. Dr. Peter Sanders Dominik Schultes Institut für Theoretische Informatik Algorithmik II Universität Karlsruhe (TH) Heidelberger
Sanders/Schultes: Routenplanung 1 Genauer Hochleistungs-Routenplaner Prof. Dr. Peter Sanders Dominik Schultes Institut für Theoretische Informatik Algorithmik II Universität Karlsruhe (TH) Heidelberger
Algorithmen für Routenplanung 12. Sitzung, Sommersemester 2013 Julian Dibbelt 17. Juni 2013
 Algorithmen für Routenplanung 12. Sitzung, Sommersemester 2013 Julian Dibbelt 17. Juni 2013 INSTITUT FÜR THEORETISCHE INFORMATIK ALGORITHMIK PROF. DR. DOROTHEA WAGNER KIT Universität des Landes Baden-Württemberg
Algorithmen für Routenplanung 12. Sitzung, Sommersemester 2013 Julian Dibbelt 17. Juni 2013 INSTITUT FÜR THEORETISCHE INFORMATIK ALGORITHMIK PROF. DR. DOROTHEA WAGNER KIT Universität des Landes Baden-Württemberg
Algorithmen für Routenplanung 11. Vorlesung, Sommersemester 2012 Daniel Delling 6. Juni 2012
 Algorithmen für Routenplanung 11. Vorlesung, Sommersemester 2012 Daniel Delling 6. Juni 2012 MICROSOFT RESEARCH SILICON VALLEY KIT Universität des Landes Baden-Württemberg und nationales Großforschungszentrum
Algorithmen für Routenplanung 11. Vorlesung, Sommersemester 2012 Daniel Delling 6. Juni 2012 MICROSOFT RESEARCH SILICON VALLEY KIT Universität des Landes Baden-Württemberg und nationales Großforschungszentrum
Algorithmen für Routenplanung
 Algorithmen für Routenplanung 16. Sitzung, Sommersemester 2011 Thomas Pajor 4. Juli 2011 INSTITUT FÜR THEORETISCHE INFORMATIK ALGORITHMIK I PROF. DR. DOROTHEA WAGNER KIT Universität des Landes Baden-Württemberg
Algorithmen für Routenplanung 16. Sitzung, Sommersemester 2011 Thomas Pajor 4. Juli 2011 INSTITUT FÜR THEORETISCHE INFORMATIK ALGORITHMIK I PROF. DR. DOROTHEA WAGNER KIT Universität des Landes Baden-Württemberg
Praktikum Routenplanung Themenvorstellung & Gruppeneinteilung, Wintersemester 2015/2016 Moritz Baum, Ben Strasser, Tobias Zündorf 19.
 Praktikum Routenplanung Themenvorstellung & Gruppeneinteilung, Wintersemester 2015/2016 Moritz Baum, Ben Strasser, Tobias Zündorf 19. Oktober 2015 INSTITUT FÜR THEORETISCHE INFORMATIK ALGORITHMIK PROF.
Praktikum Routenplanung Themenvorstellung & Gruppeneinteilung, Wintersemester 2015/2016 Moritz Baum, Ben Strasser, Tobias Zündorf 19. Oktober 2015 INSTITUT FÜR THEORETISCHE INFORMATIK ALGORITHMIK PROF.
Algorithmen für Routenplanung 10. Vorlesung, Sommersemester 2016 Ben Strasser 25. Mai 2016
 Algorithmen für Routenplanung 10. Vorlesung, Sommersemester 2016 Ben Strasser 25. Mai 2016 INSTITUT FÜR THEORETISCHE INFORMATIK ALGORITHMIK PROF. DR. DOROTHEA WAGNER KIT Universität des Landes Baden-Württemberg
Algorithmen für Routenplanung 10. Vorlesung, Sommersemester 2016 Ben Strasser 25. Mai 2016 INSTITUT FÜR THEORETISCHE INFORMATIK ALGORITHMIK PROF. DR. DOROTHEA WAGNER KIT Universität des Landes Baden-Württemberg
Christian Schulz und Johannes Singler
 Christian Schulz und Johannes Singler, Prof. Sanders 1 KIT Christian Universität des Schulz Landes Baden-Württemberg und Johannes undsingler: nationales 3. Übung Forschungszentrum Algorithmen in der Helmholtz-Gemeinschaft
Christian Schulz und Johannes Singler, Prof. Sanders 1 KIT Christian Universität des Schulz Landes Baden-Württemberg und Johannes undsingler: nationales 3. Übung Forschungszentrum Algorithmen in der Helmholtz-Gemeinschaft
Algorithmen II Vorlesung am
 Algorithmen II Vorlesung am 0..0 Minimale Schnitte in Graphen INSTITUT FÜR THEORETISCHE INFORMATIK PROF. DR. DOROTHEA WAGNER KIT Universität des Landes Baden-Württemberg und Algorithmen nationales Forschungszentrum
Algorithmen II Vorlesung am 0..0 Minimale Schnitte in Graphen INSTITUT FÜR THEORETISCHE INFORMATIK PROF. DR. DOROTHEA WAGNER KIT Universität des Landes Baden-Württemberg und Algorithmen nationales Forschungszentrum
2. Übungsblatt zu Algorithmen II im WS 2016/2017
 Karlsruher Institut für Technologie Institut für Theoretische Informatik Prof. Dr. Peter Sanders Dr. Christian Schulz, Dr. Simon Gog Michael Axtmann. Übungsblatt zu Algorithmen II im WS 016/017 Aufgabe
Karlsruher Institut für Technologie Institut für Theoretische Informatik Prof. Dr. Peter Sanders Dr. Christian Schulz, Dr. Simon Gog Michael Axtmann. Übungsblatt zu Algorithmen II im WS 016/017 Aufgabe
Algorithmische Methoden zur Netzwerkanalyse
 Algorithmische Methoden zur Netzwerkanalyse Juniorprof. Dr. Henning Meyerhenke Institut für Theoretische Informatik 1 KIT Henning Universität desmeyerhenke, Landes Baden-Württemberg Institutund für Theoretische
Algorithmische Methoden zur Netzwerkanalyse Juniorprof. Dr. Henning Meyerhenke Institut für Theoretische Informatik 1 KIT Henning Universität desmeyerhenke, Landes Baden-Württemberg Institutund für Theoretische
Quantifizierung der Ineffizienz von Equilibria
 Quantifizierung der Ineffizienz von Equilibria Marcus Juli 2010 INSTITUT FÜR THEORETISCHE INFORMATIK KARLSRUHER INSTITUT FÜR TECHNOLOGIE (KIT) KIT Universität des Landes Baden-Württemberg und nationales
Quantifizierung der Ineffizienz von Equilibria Marcus Juli 2010 INSTITUT FÜR THEORETISCHE INFORMATIK KARLSRUHER INSTITUT FÜR TECHNOLOGIE (KIT) KIT Universität des Landes Baden-Württemberg und nationales
Praktikum Routenplanung Vorbesprechung, Wintersemester 2012/2013 Moritz Baum, Julian Dibbelt, Thomas Pajor, Ben Strasser 17.
 Praktikum Routenplanung Vorbesprechung, Wintersemester 01/013 Moritz Baum, Julian Dibbelt, Thomas Pajor, Ben Strasser 17. Oktober 01 INSTITUT FÜR THEORETISCHE INFORMATIK ALGORITHMIK I PROF. DR. DOROTHEA
Praktikum Routenplanung Vorbesprechung, Wintersemester 01/013 Moritz Baum, Julian Dibbelt, Thomas Pajor, Ben Strasser 17. Oktober 01 INSTITUT FÜR THEORETISCHE INFORMATIK ALGORITHMIK I PROF. DR. DOROTHEA
Semi-Skylines und Skyline Snippets
 Skyline von Manhattan, NY, USA Semi-Skylines und Skyline Snippets Markus Endres Universität Augsburg 10. Februar 2011 Skyline Queries Finde preiswerte Hotels in Strandnähe! Distance to the beach [km] 2.0
Skyline von Manhattan, NY, USA Semi-Skylines und Skyline Snippets Markus Endres Universität Augsburg 10. Februar 2011 Skyline Queries Finde preiswerte Hotels in Strandnähe! Distance to the beach [km] 2.0
Highway Hierarchies. Kristian Dannowski, Matthias Hoeschel
 Highway Hierarchies Kristian Dannowski, Matthias Hoeschel Gliederung Einleitung / Bidirektional Dijkstra Intuition / Naive Strategie Konstruktion der Highway Hierarchie Suche in der Highway Hierarchie
Highway Hierarchies Kristian Dannowski, Matthias Hoeschel Gliederung Einleitung / Bidirektional Dijkstra Intuition / Naive Strategie Konstruktion der Highway Hierarchie Suche in der Highway Hierarchie
Lokalisierung von inneren und äußeren Grenzen in Sensornetzwerken
 Lokalisierung von inneren und äußeren Grenzen in Sensornetzwerken Seminararbeit: Algorithmen für Sensornetzwerke Thomas Gramer 1 Thomas Gramer: KIT Universität des Landes Baden-Württemberg und nationales
Lokalisierung von inneren und äußeren Grenzen in Sensornetzwerken Seminararbeit: Algorithmen für Sensornetzwerke Thomas Gramer 1 Thomas Gramer: KIT Universität des Landes Baden-Württemberg und nationales
9. Übung Algorithmen I
 INSTITUT FÜR THEORETISCHE INFORMATIK 1 KIT Universität des Landes Baden-Württemberg und nationales Forschungszentrum in der Helmholtz-Gemeinschaft Institut für Theoretische www.kit.edu Informatik Musterlösung
INSTITUT FÜR THEORETISCHE INFORMATIK 1 KIT Universität des Landes Baden-Württemberg und nationales Forschungszentrum in der Helmholtz-Gemeinschaft Institut für Theoretische www.kit.edu Informatik Musterlösung
Routing Algorithmen. Begriffe, Definitionen
 Begriffe, Definitionen Routing (aus der Informatik) Wegewahl oder Verkehrslenkung bezeichnet in der Telekommunikation das Festlegen von Wegen für Nachrichtenströme bei der Nachrichtenübermittlung über
Begriffe, Definitionen Routing (aus der Informatik) Wegewahl oder Verkehrslenkung bezeichnet in der Telekommunikation das Festlegen von Wegen für Nachrichtenströme bei der Nachrichtenübermittlung über
Algorithmen für Routenplanung
 Algorithmen für Routenplanung 15. Vorlesung, Sommersemester 016 Moritz Baum 15. Juni 016 INSTITUT FÜR THEORETISCHE INFORMATIK ALGORITHMIK PROF. DR. DOROTHEA WAGNER KIT Universität des Landes Baden-Württemberg
Algorithmen für Routenplanung 15. Vorlesung, Sommersemester 016 Moritz Baum 15. Juni 016 INSTITUT FÜR THEORETISCHE INFORMATIK ALGORITHMIK PROF. DR. DOROTHEA WAGNER KIT Universität des Landes Baden-Württemberg
Algorithmische Methoden zur Netzwerkanalyse Vorlesung 7, 30.11.2011 Henning Meyerhenke
 Algorithmische Methoden zur Netzwerkanalyse Vorlesung 7, 30.11.2011 Henning Meyerhenke 1 KIT Henning Universität desmeyerhenke: Landes Baden-Württemberg und nationales Algorithmische Forschungszentrum
Algorithmische Methoden zur Netzwerkanalyse Vorlesung 7, 30.11.2011 Henning Meyerhenke 1 KIT Henning Universität desmeyerhenke: Landes Baden-Württemberg und nationales Algorithmische Forschungszentrum
Dijkstra: Laufzeit. Insgesamt: T Dijkstra = O m T decreasekey (n)+n (T deletemin (n)+t insert (n))
+n (T deletemin (n)+t insert (n))") Dijkstra: Laufzeit Function Dijkstra(s : NodeId) : NodeArray NodeArray d = {,..., }; parent[s]:= s; d[s] := 0; Q.insert(s) // O(n) while Q 6= /0 do u := Q.deleteMin // apple n foreach edge e =(u,v) 2 E
Dijkstra: Laufzeit Function Dijkstra(s : NodeId) : NodeArray NodeArray d = {,..., }; parent[s]:= s; d[s] := 0; Q.insert(s) // O(n) while Q 6= /0 do u := Q.deleteMin // apple n foreach edge e =(u,v) 2 E
9. Heuristische Suche
 9. Heuristische Suche Prof. Dr. Rudolf Kruse University of Magdeburg Faculty of Computer Science Magdeburg, Germany rudolf.kruse@cs.uni-magdeburg.de S Heuristische Suche Idee: Wir nutzen eine (heuristische)
9. Heuristische Suche Prof. Dr. Rudolf Kruse University of Magdeburg Faculty of Computer Science Magdeburg, Germany rudolf.kruse@cs.uni-magdeburg.de S Heuristische Suche Idee: Wir nutzen eine (heuristische)
Dynamische Programmierung. Problemlösungsstrategie der Informatik
 als Problemlösungsstrategie der Informatik und ihre Anwedung in der Diskreten Mathematik und Graphentheorie Fabian Cordt Enisa Metovic Wissenschaftliche Arbeiten und Präsentationen, WS 2010/2011 Gliederung
als Problemlösungsstrategie der Informatik und ihre Anwedung in der Diskreten Mathematik und Graphentheorie Fabian Cordt Enisa Metovic Wissenschaftliche Arbeiten und Präsentationen, WS 2010/2011 Gliederung
Kombinatorische Optimierung
 Juniorprof. Dr. Henning Meyerhenke 1 Henning Meyerhenke: KIT Universität des Landes Baden-Württemberg und nationales Forschungszentrum in der Helmholtz-Gemeinschaft www.kit.edu Vorlesung 4 Programm des
Juniorprof. Dr. Henning Meyerhenke 1 Henning Meyerhenke: KIT Universität des Landes Baden-Württemberg und nationales Forschungszentrum in der Helmholtz-Gemeinschaft www.kit.edu Vorlesung 4 Programm des
Topologieerkennung von Sensornetzwerken
 looz@ira.uka.de Institut für Theoretische Informatik - Algorithmik I 26. Januar 2010 Übersicht Motivation Definitionen Überlegungen Algorithmus Resultate Motivation Definitionen Überlegungen Algorithmus
looz@ira.uka.de Institut für Theoretische Informatik - Algorithmik I 26. Januar 2010 Übersicht Motivation Definitionen Überlegungen Algorithmus Resultate Motivation Definitionen Überlegungen Algorithmus
Das Steinerbaumproblem
 Das Steinerbaumproblem Natalie Richert Fakultät für Elektrotechnik, Informatik und Mathematik, Universität Paderborn 4. Februar 008 / 3 Überblick Problembeschreibung Vorstellung von zwei Approimationsalgorithmen
Das Steinerbaumproblem Natalie Richert Fakultät für Elektrotechnik, Informatik und Mathematik, Universität Paderborn 4. Februar 008 / 3 Überblick Problembeschreibung Vorstellung von zwei Approimationsalgorithmen
Übungsblatt 6. Vorlesung Theoretische Grundlagen der Informatik im WS 16/17
 Institut für Theoretische Informatik Lehrstuhl Prof. Dr. D. Wagner Übungsblatt 6 Vorlesung Theoretische Grundlagen der Informatik im WS 16/17 Ausgabe 22. Dezember 2016 Abgabe 17. Januar 2017, 11:00 Uhr
Institut für Theoretische Informatik Lehrstuhl Prof. Dr. D. Wagner Übungsblatt 6 Vorlesung Theoretische Grundlagen der Informatik im WS 16/17 Ausgabe 22. Dezember 2016 Abgabe 17. Januar 2017, 11:00 Uhr
Algorithmen für Routenplanung 14. Vorlesung, Sommersemester 2012 Daniel Delling 18. Juni 2012
 Algorithmen für Routenplanung 14. Vorlesung, Sommersemester 2012 Daniel Delling 18. Juni 2012 MICROSOFT RESEARCH SILICON VALLEY KIT Universität des Landes Baden-Württemberg und nationales Großforschungszentrum
Algorithmen für Routenplanung 14. Vorlesung, Sommersemester 2012 Daniel Delling 18. Juni 2012 MICROSOFT RESEARCH SILICON VALLEY KIT Universität des Landes Baden-Württemberg und nationales Großforschungszentrum
3. Musterlösung. Problem 1: Boruvka MST
 Universität Karlsruhe Algorithmentechnik Fakultät für Informatik WS 06/07 ITI Wagner. Musterlösung Problem : Boruvka MST pt (a) Beweis durch Widerspruch. Sei T MST von G, e die lokal minimale Kante eines
Universität Karlsruhe Algorithmentechnik Fakultät für Informatik WS 06/07 ITI Wagner. Musterlösung Problem : Boruvka MST pt (a) Beweis durch Widerspruch. Sei T MST von G, e die lokal minimale Kante eines
Datenstrukturen & Algorithmen
 Datenstrukturen & Algorithmen Matthias Zwicker Universität Bern Frühling 2010 Übersicht Binäre Suchbäume Einführung und Begriffe Binäre Suchbäume 2 Binäre Suchbäume Datenstruktur für dynamische Mengen
Datenstrukturen & Algorithmen Matthias Zwicker Universität Bern Frühling 2010 Übersicht Binäre Suchbäume Einführung und Begriffe Binäre Suchbäume 2 Binäre Suchbäume Datenstruktur für dynamische Mengen
Vorlesung Algorithmische Geometrie. Streckenschnitte. Martin Nöllenburg 19.04.2011
 Vorlesung Algorithmische Geometrie LEHRSTUHL FÜR ALGORITHMIK I INSTITUT FÜR THEORETISCHE INFORMATIK FAKULTÄT FÜR INFORMATIK Martin Nöllenburg 19.04.2011 Überlagern von Kartenebenen Beispiel: Gegeben zwei
Vorlesung Algorithmische Geometrie LEHRSTUHL FÜR ALGORITHMIK I INSTITUT FÜR THEORETISCHE INFORMATIK FAKULTÄT FÜR INFORMATIK Martin Nöllenburg 19.04.2011 Überlagern von Kartenebenen Beispiel: Gegeben zwei
Graphen. Leonhard Euler ( )
") Graphen Leonhard Euler (1707-1783) 2 Graph Ein Graph besteht aus Knoten (nodes, vertices) die durch Kanten (edges) miteinander verbunden sind. 3 Nachbarschaftsbeziehungen Zwei Knoten heissen adjazent (adjacent),
Graphen Leonhard Euler (1707-1783) 2 Graph Ein Graph besteht aus Knoten (nodes, vertices) die durch Kanten (edges) miteinander verbunden sind. 3 Nachbarschaftsbeziehungen Zwei Knoten heissen adjazent (adjacent),
Grundlagen der Künstlichen Intelligenz
 Grundlagen der Künstlichen Intelligenz 6. Klassische Suche: Datenstrukturen für Suchalgorithmen Malte Helmert Universität Basel 7. März 2014 Klassische Suche: Überblick Kapitelüberblick klassische Suche:
Grundlagen der Künstlichen Intelligenz 6. Klassische Suche: Datenstrukturen für Suchalgorithmen Malte Helmert Universität Basel 7. März 2014 Klassische Suche: Überblick Kapitelüberblick klassische Suche:
Algorithmen II Vorlesung am
 Algorithmen II Vorlesung am 24.01.2013 Online Algorithmen INSTITUT FÜR THEORETISCHE INFORMATIK PROF. DR. DOROTHEA WAGNER KIT Universität des Landes Baden-Württemberg und Algorithmen nationales Forschungszentrum
Algorithmen II Vorlesung am 24.01.2013 Online Algorithmen INSTITUT FÜR THEORETISCHE INFORMATIK PROF. DR. DOROTHEA WAGNER KIT Universität des Landes Baden-Württemberg und Algorithmen nationales Forschungszentrum
Übungsblatt 2 - Lösung
 Institut für Theoretische Informatik Lehrstuhl Prof. Dr. D. Wagner Übungsblatt 2 - Lösung Vorlesung Algorithmentechnik im WS 08/09 Ausgabe 04. November 2008 Abgabe 8. November, 5:0 Uhr (im Kasten vor Zimmer
Institut für Theoretische Informatik Lehrstuhl Prof. Dr. D. Wagner Übungsblatt 2 - Lösung Vorlesung Algorithmentechnik im WS 08/09 Ausgabe 04. November 2008 Abgabe 8. November, 5:0 Uhr (im Kasten vor Zimmer
Toleranzbasierte Algorithmen für das Travelling Salesman Problem. Gerold Jäger
 Toleranzbasierte Algorithmen für das Travelling Salesman Problem Gerold Jäger (Zusammenarbeit mit Jop Sibeyn, Boris Goldengorin) Institut für Informatik Martin-Luther-Universität Halle-Wittenberg gerold.jaeger@informatik.uni-halle.de
Toleranzbasierte Algorithmen für das Travelling Salesman Problem Gerold Jäger (Zusammenarbeit mit Jop Sibeyn, Boris Goldengorin) Institut für Informatik Martin-Luther-Universität Halle-Wittenberg gerold.jaeger@informatik.uni-halle.de
Algorithmen und Datenstrukturen in der Bioinformatik Viertes Übungsblatt WS 05/06 Musterlösung
 Konstantin Clemens Johanna Ploog Freie Universität Berlin Institut für Mathematik II Arbeitsgruppe für Mathematik in den Lebenswissenschaften Algorithmen und Datenstrukturen in der Bioinformatik Viertes
Konstantin Clemens Johanna Ploog Freie Universität Berlin Institut für Mathematik II Arbeitsgruppe für Mathematik in den Lebenswissenschaften Algorithmen und Datenstrukturen in der Bioinformatik Viertes
Undirected Single-Source Shortest Paths with Positive Integer Weights in Linear Time
 Universität Konstanz Mathematisch-naturwissenschaftliche Sektion Fachbereich Mathematik und Statistik Wintersemester 2001/02 Mikkel Thorup: Undirected Single-Source Shortest Paths with Positive Integer
Universität Konstanz Mathematisch-naturwissenschaftliche Sektion Fachbereich Mathematik und Statistik Wintersemester 2001/02 Mikkel Thorup: Undirected Single-Source Shortest Paths with Positive Integer
Über die Berechnung der Optimalwertfunktion in zeitabhängigen Netzwerken
 Über die Berechnung der Optimalwertfunktion in zeitabhängigen Netzwerken Sebastian Kluge Elgersburg, 3.3.2010 Kürzeste Wege in Netzwerken H 288 km 426 km B K 194 km F 609 km 225 km N 439 km 204 km S 166
Über die Berechnung der Optimalwertfunktion in zeitabhängigen Netzwerken Sebastian Kluge Elgersburg, 3.3.2010 Kürzeste Wege in Netzwerken H 288 km 426 km B K 194 km F 609 km 225 km N 439 km 204 km S 166
Grundlagen: Algorithmen und Datenstrukturen
 Grundlagen: Algorithmen und Datenstrukturen Prof. Dr. Hanjo Täubig Lehrstuhl für Effiziente Algorithmen (Prof. Dr. Ernst W. Mayr) Institut für Informatik Technische Universität München Sommersemester 00
Grundlagen: Algorithmen und Datenstrukturen Prof. Dr. Hanjo Täubig Lehrstuhl für Effiziente Algorithmen (Prof. Dr. Ernst W. Mayr) Institut für Informatik Technische Universität München Sommersemester 00
Wie findet das Navi den Weg?
 0.05.0 Verwandte Fragestellungen Problemstellungen aus der Praxis Prof. Dr. Paul Rawiel Gliederung des Vortrags Speicherung von Kartendaten zur Navigation Kriterien für die Navigation Finden des kürzesten
0.05.0 Verwandte Fragestellungen Problemstellungen aus der Praxis Prof. Dr. Paul Rawiel Gliederung des Vortrags Speicherung von Kartendaten zur Navigation Kriterien für die Navigation Finden des kürzesten
Algorithmen und Datenstrukturen 2
 Algorithmen und Datenstrukturen 2 Sommersemester 2007 4. Vorlesung Peter F. Stadler Universität Leipzig Institut für Informatik studla@bioinf.uni-leipzig.de Traversierung Durchlaufen eines Graphen, bei
Algorithmen und Datenstrukturen 2 Sommersemester 2007 4. Vorlesung Peter F. Stadler Universität Leipzig Institut für Informatik studla@bioinf.uni-leipzig.de Traversierung Durchlaufen eines Graphen, bei
Optimization techniques for large-scale traceroute measurements
 Abschlussvortrag Master s Thesis Optimization techniques for large-scale traceroute measurements Benjamin Hof Lehrstuhl für Netzarchitekturen und Netzdienste Institut für Informatik Technische Universität
Abschlussvortrag Master s Thesis Optimization techniques for large-scale traceroute measurements Benjamin Hof Lehrstuhl für Netzarchitekturen und Netzdienste Institut für Informatik Technische Universität
Babeș-Bolyai Universität Cluj Napoca Fakultät für Mathematik und Informatik Grundlagen der Programmierung MLG5005. Paradigmen im Algorithmenentwurf
 Babeș-Bolyai Universität Cluj Napoca Fakultät für Mathematik und Informatik Grundlagen der Programmierung MLG5005 Paradigmen im Algorithmenentwurf Problemlösen Problem definieren Algorithmus entwerfen
Babeș-Bolyai Universität Cluj Napoca Fakultät für Mathematik und Informatik Grundlagen der Programmierung MLG5005 Paradigmen im Algorithmenentwurf Problemlösen Problem definieren Algorithmus entwerfen
9. Übung Algorithmen I
 Timo Bingmann, Christian Schulz INSTITUT FÜR THEORETISCHE INFORMATIK, PROF. SANDERS 1 KIT Timo Universität Bingmann, des LandesChristian Baden-Württemberg Schulz und nationales Forschungszentrum in der
Timo Bingmann, Christian Schulz INSTITUT FÜR THEORETISCHE INFORMATIK, PROF. SANDERS 1 KIT Timo Universität Bingmann, des LandesChristian Baden-Württemberg Schulz und nationales Forschungszentrum in der
4 Greedy-Algorithmen (gierige Algorithmen)
") Greedy-Algorithmen (gierige Algorithmen) Greedy-Algorithmen werden oft für die exakte oder approximative Lösung von Optimierungsproblemen verwendet. Typischerweise konstruiert ein Greedy-Algorithmus eine
Greedy-Algorithmen (gierige Algorithmen) Greedy-Algorithmen werden oft für die exakte oder approximative Lösung von Optimierungsproblemen verwendet. Typischerweise konstruiert ein Greedy-Algorithmus eine
MASTER THESIS. Ontology-Based Route Queries with Time Windows. Tobias Faaß. 17. Juni 2015
 MASTER THESIS Ontology-Based Route Queries with Time Windows 17. Juni 2015 Tobias Faaß Albert-Ludwigs-Universität Freiburg im Breisgau Technische Fakultät Institut für Informatik GLIEDERUNG 1. Einführung
MASTER THESIS Ontology-Based Route Queries with Time Windows 17. Juni 2015 Tobias Faaß Albert-Ludwigs-Universität Freiburg im Breisgau Technische Fakultät Institut für Informatik GLIEDERUNG 1. Einführung
Modelle der Parallelverarbeitung 7. Baumförmige Zellularautomaten
 Modelle der Parallelverarbeitung Modelle der Parallelverarbeitung 7. Baumförmige Zellularautomaten Thomas Worsch Fakultät für Informatik Karlsruher Institut für Technologie Sommersemester 2016 1 / 29 Überblick
Modelle der Parallelverarbeitung Modelle der Parallelverarbeitung 7. Baumförmige Zellularautomaten Thomas Worsch Fakultät für Informatik Karlsruher Institut für Technologie Sommersemester 2016 1 / 29 Überblick
Very simple methods for all pairs network flow analysis
 Very simple methods for all pairs network flow analysis Tobias Ludes 02.07.07 Inhalt Einführung Algorithmen Modifikation der Gomory-Hu Methode Einführung Nach Gomory-Hu nur n-1 Netzwerk-Fluss- Berechnungen
Very simple methods for all pairs network flow analysis Tobias Ludes 02.07.07 Inhalt Einführung Algorithmen Modifikation der Gomory-Hu Methode Einführung Nach Gomory-Hu nur n-1 Netzwerk-Fluss- Berechnungen
\ E) eines Graphen G = (V, E) besitzt die gleiche Knotenmenge V und hat als Kantenmenge alle Kanten des vollständigen Graphen ohne die Kantenmenge E.
 eines Graphen G = (V, E) besitzt die gleiche Knotenmenge V und hat als Kantenmenge alle Kanten des vollständigen Graphen ohne die Kantenmenge E.") Das Komplement Ḡ = (V, ( V ) \ E) eines Graphen G = (V, E) besitzt die gleiche Knotenmenge V und hat als Kantenmenge alle Kanten des vollständigen Graphen ohne die Kantenmenge E. Ein Graph H = (V, E )
Das Komplement Ḡ = (V, ( V ) \ E) eines Graphen G = (V, E) besitzt die gleiche Knotenmenge V und hat als Kantenmenge alle Kanten des vollständigen Graphen ohne die Kantenmenge E. Ein Graph H = (V, E )
Bluetooth Low Energy gleichzeitige Verbindungen zu mehreren Knoten
 Bluetooth Low Energy gleichzeitige Verbindungen zu mehreren Knoten Andreas Müller, Mirco Gysin, Andreas Rüst Zürcher Hochschule für Angewandte Wissenschaften Institut für Embedded Systems Winterthur Kontakt:
Bluetooth Low Energy gleichzeitige Verbindungen zu mehreren Knoten Andreas Müller, Mirco Gysin, Andreas Rüst Zürcher Hochschule für Angewandte Wissenschaften Institut für Embedded Systems Winterthur Kontakt:
Rechnernetze Übung 10. Frank Weinhold Professur VSR Fakultät für Informatik TU Chemnitz Juni 2011
 Rechnernetze Übung 10 rank Weinhold Professur VSR akultät für Informatik TU hemnitz Juni 2011 Das Weiterleiten (Routing) erfüllt die wichtige ufgabe, einzelne Teilstrecken des Kommunikationsnetzes so zu
Rechnernetze Übung 10 rank Weinhold Professur VSR akultät für Informatik TU hemnitz Juni 2011 Das Weiterleiten (Routing) erfüllt die wichtige ufgabe, einzelne Teilstrecken des Kommunikationsnetzes so zu
Datenstrukturen. einfach verkettete Liste
 einfach verkettete Liste speichert Daten in einer linearen Liste, in der jedes Element auf das nächste Element zeigt Jeder Knoten der Liste enthält beliebige Daten und einen Zeiger auf den nächsten Knoten
einfach verkettete Liste speichert Daten in einer linearen Liste, in der jedes Element auf das nächste Element zeigt Jeder Knoten der Liste enthält beliebige Daten und einen Zeiger auf den nächsten Knoten
Algo&Komp. - Wichtige Begriffe Mattia Bergomi Woche 6 7
 1 Kürzeste Pfade Woche 6 7 Hier arbeiten wir mit gewichteten Graphen, d.h. Graphen, deren Kanten mit einer Zahl gewichtet werden. Wir bezeichnen die Gewichtsfunktion mit l : E R. Wir wollen einen kürzesten
1 Kürzeste Pfade Woche 6 7 Hier arbeiten wir mit gewichteten Graphen, d.h. Graphen, deren Kanten mit einer Zahl gewichtet werden. Wir bezeichnen die Gewichtsfunktion mit l : E R. Wir wollen einen kürzesten
Konvexe Hülle. Konvexe Hülle. Mathematik. Konvexe Hülle: Definition. Mathematik. Konvexe Hülle: Eigenschaften. AK der Algorithmik 5, SS 2005 Hu Bin
 Konvexe Hülle Konvexe Hülle AK der Algorithmik 5, SS 2005 Hu Bin Anwendung: Computergraphik Boundary Kalkulationen Geometrische Optimierungsaufgaben Konvexe Hülle: Definition Mathematik Konvex: Linie zwischen
Konvexe Hülle Konvexe Hülle AK der Algorithmik 5, SS 2005 Hu Bin Anwendung: Computergraphik Boundary Kalkulationen Geometrische Optimierungsaufgaben Konvexe Hülle: Definition Mathematik Konvex: Linie zwischen
5. Musterlösung. Problem 1: Vitale Kanten * ω(f) > ω(f ). (a) Untersuchen Sie, ob es in jedem Netzwerk vitale Kanten gibt.
 > ω(f ). (a) Untersuchen Sie, ob es in jedem Netzwerk vitale Kanten gibt.") Universität Karlsruhe Algorithmentechnik Fakultät für Informatik WS 05/06 ITI Wagner 5. Musterlösung Problem : Vitale Kanten * In einem Netzwerk (D = (V, E); s, t; c) mit Maximalfluß f heißen Kanten e
Universität Karlsruhe Algorithmentechnik Fakultät für Informatik WS 05/06 ITI Wagner 5. Musterlösung Problem : Vitale Kanten * In einem Netzwerk (D = (V, E); s, t; c) mit Maximalfluß f heißen Kanten e
Scheduling und Lineare ProgrammierungNach J. K. Lenstra, D. B. Shmoys und É.
 Scheduling und Lineare ProgrammierungNach J. K. Lenstra, D. B. Shmoys und É. Tardos Janick Martinez Esturo jmartine@techfak.uni-bielefeld.de xx.08.2007 Sommerakademie Görlitz Arbeitsgruppe 5 Gliederung
Scheduling und Lineare ProgrammierungNach J. K. Lenstra, D. B. Shmoys und É. Tardos Janick Martinez Esturo jmartine@techfak.uni-bielefeld.de xx.08.2007 Sommerakademie Görlitz Arbeitsgruppe 5 Gliederung
Einleitung. Komplexe Anfragen. Suche ist teuer. VA-File Verfeinerungen. A0-Algo. GeVAS. Schluß. Folie 2. Einleitung. Suche ist teuer.
 Anwendung Input: Query-Bild, Ergebnis: Menge ähnlicher Bilder. Kapitel 8: Ähnlichkeitsanfragen und ihre effiziente Evaluierung Wie zu finden? Corbis, NASA: EOS Bilddatenbank Folie Folie 2 Ähnlichkeitssuche
Anwendung Input: Query-Bild, Ergebnis: Menge ähnlicher Bilder. Kapitel 8: Ähnlichkeitsanfragen und ihre effiziente Evaluierung Wie zu finden? Corbis, NASA: EOS Bilddatenbank Folie Folie 2 Ähnlichkeitssuche
TECHNISCHE UNIVERSITÄT MÜNCHEN FAKULTÄT FÜR INFORMATIK
 TECHNISCHE UNIVERSITÄT MÜNCHEN FAKULTÄT FÜR INFORMATIK Lehrstuhl für Sprachen und Beschreibungsstrukturen SS 2009 Grundlagen: Algorithmen und Datenstrukturen Übungsblatt 11 Prof. Dr. Helmut Seidl, S. Pott,
TECHNISCHE UNIVERSITÄT MÜNCHEN FAKULTÄT FÜR INFORMATIK Lehrstuhl für Sprachen und Beschreibungsstrukturen SS 2009 Grundlagen: Algorithmen und Datenstrukturen Übungsblatt 11 Prof. Dr. Helmut Seidl, S. Pott,
Literatur. Dominating Set (DS) Dominating Sets in Sensornetzen. Problem Minimum Dominating Set (MDS)
 Dominating Sets in Sensornetzen. Problem Minimum Dominating Set (MDS)") Dominating Set 59 Literatur Dominating Set Grundlagen 60 Dominating Set (DS) M. V. Marathe, H. Breu, H.B. Hunt III, S. S. Ravi, and D. J. Rosenkrantz: Simple Heuristics for Unit Disk Graphs. Networks 25,
Dominating Set 59 Literatur Dominating Set Grundlagen 60 Dominating Set (DS) M. V. Marathe, H. Breu, H.B. Hunt III, S. S. Ravi, and D. J. Rosenkrantz: Simple Heuristics for Unit Disk Graphs. Networks 25,
Wiederholung zu Flüssen
 Universität Konstanz Methoden der Netzwerkanalyse Fachbereich Informatik & Informationswissenschaft SS 2008 Prof. Dr. Ulrik Brandes / Melanie Badent Wiederholung zu Flüssen Wir untersuchen Flüsse in Netzwerken:
Universität Konstanz Methoden der Netzwerkanalyse Fachbereich Informatik & Informationswissenschaft SS 2008 Prof. Dr. Ulrik Brandes / Melanie Badent Wiederholung zu Flüssen Wir untersuchen Flüsse in Netzwerken:
Kapitel 3: Untere Schranken für algorithmische Probleme Gliederung
 Gliederung 1. Grundlagen 2. Analyse der Laufzeit von Algorithmen 3. Untere Schranken für algorithmische Probleme 4. Sortier- und Selektionsverfahren 5. Paradigmen des Algorithmenentwurfs 6. Ausgewählte
Gliederung 1. Grundlagen 2. Analyse der Laufzeit von Algorithmen 3. Untere Schranken für algorithmische Probleme 4. Sortier- und Selektionsverfahren 5. Paradigmen des Algorithmenentwurfs 6. Ausgewählte
Grundlagen der Informatik Kapitel 20. Harald Krottmaier Sven Havemann
 Grundlagen der Informatik Kapitel 20 Harald Krottmaier Sven Havemann Agenda Klassen von Problemen Einige Probleme... Approximationsalgorithmen WS2007 2 Klassen P NP NP-vollständig WS2007 3 Klasse P praktisch
Grundlagen der Informatik Kapitel 20 Harald Krottmaier Sven Havemann Agenda Klassen von Problemen Einige Probleme... Approximationsalgorithmen WS2007 2 Klassen P NP NP-vollständig WS2007 3 Klasse P praktisch
Diskrete Mathematik für Informatiker
 Universität Siegen Lehrstuhl Theoretische Informatik Carl Philipp Reh Daniel König Diskrete Mathematik für Informatiker WS 016/017 Übung 7 1. Gegeben sei folgender Graph und das Matching M = {{h, f}, {c,
Universität Siegen Lehrstuhl Theoretische Informatik Carl Philipp Reh Daniel König Diskrete Mathematik für Informatiker WS 016/017 Übung 7 1. Gegeben sei folgender Graph und das Matching M = {{h, f}, {c,
Effiziente Algorithmen und Datenstrukturen I. Kapitel 9: Minimale Spannbäume
 Effiziente Algorithmen und Datenstrukturen I Kapitel 9: Minimale Spannbäume Christian Scheideler WS 008 19.0.009 Kapitel 9 1 Minimaler Spannbaum Zentrale Frage: Welche Kanten muss ich nehmen, um mit minimalen
Effiziente Algorithmen und Datenstrukturen I Kapitel 9: Minimale Spannbäume Christian Scheideler WS 008 19.0.009 Kapitel 9 1 Minimaler Spannbaum Zentrale Frage: Welche Kanten muss ich nehmen, um mit minimalen
Dynamisches Routing in der Logistik
 Informatik, Angewandte Informatik, Technische Informationssysteme Dynamisches Routing in der Logistik Tobias Dimmel Dresden, 24.05.2012 Agenda 1. Begriffe 2. Traveling Salesman Problem 3. Ameisenalgorithmus
Informatik, Angewandte Informatik, Technische Informationssysteme Dynamisches Routing in der Logistik Tobias Dimmel Dresden, 24.05.2012 Agenda 1. Begriffe 2. Traveling Salesman Problem 3. Ameisenalgorithmus
Überblick. TSP Vergleich der Lösungen. Das Travelling Salesman Problem. Nearest-Neighbor Heuristik für TSP
 Kap..1 Heuristiken Kap.. Approximative Algorithmen und Gütegarantien Professor Dr. Lehrstuhl für Algorithm Engineering, LS11 Fakultät für Informatik, TU Dortmund 3. VO DAP SS 008 14. Juli 009 Überblick
Kap..1 Heuristiken Kap.. Approximative Algorithmen und Gütegarantien Professor Dr. Lehrstuhl für Algorithm Engineering, LS11 Fakultät für Informatik, TU Dortmund 3. VO DAP SS 008 14. Juli 009 Überblick
Kap. 7.1 Heuristiken Kap. 7.2 Approximative Algorithmen und Gütegarantien
 Kap. 7.1 Heuristiken Kap. 7.2 Approximative Algorithmen und Gütegarantien Professor Dr. Lehrstuhl für Algorithm Engineering, LS11 Fakultät für Informatik, TU Dortmund 23. VO DAP2 SS 2008 14. Juli 2009
Kap. 7.1 Heuristiken Kap. 7.2 Approximative Algorithmen und Gütegarantien Professor Dr. Lehrstuhl für Algorithm Engineering, LS11 Fakultät für Informatik, TU Dortmund 23. VO DAP2 SS 2008 14. Juli 2009
Quadtrees und Meshing
 Vorlesung Algorithmische Geometrie INSTITUT FÜR THEORETISCHE INFORMATIK FAKULTÄT FÜR INFORMATIK Martin Nöllenburg 24.06.2014 Motivation: Meshing von Platinenlayouts Zur Simulation der Hitzeentwicklung
Vorlesung Algorithmische Geometrie INSTITUT FÜR THEORETISCHE INFORMATIK FAKULTÄT FÜR INFORMATIK Martin Nöllenburg 24.06.2014 Motivation: Meshing von Platinenlayouts Zur Simulation der Hitzeentwicklung
Kürzeste Wege in Graphen. Maurice Duvigneau Otto-von-Guericke Universität Fakultät für Informatik
 Kürzeste Wege in Graphen Maurice Duvigneau Otto-von-Guericke Universität Fakultät für Informatik Gliederung Einleitung Definitionen Algorithmus von Dijkstra Bellmann-Ford Algorithmus Floyd-Warshall Algorithmus
Kürzeste Wege in Graphen Maurice Duvigneau Otto-von-Guericke Universität Fakultät für Informatik Gliederung Einleitung Definitionen Algorithmus von Dijkstra Bellmann-Ford Algorithmus Floyd-Warshall Algorithmus
3 Klassifikation wichtiger Optimierungsprobleme
 3 Klassifikation wichtiger Optimierungsprobleme 3.1 Das MIN- -TSP Wir kehren nochmal zurück zum Handlungsreisendenproblem für Inputs (w {i,j} ) 1 i
3 Klassifikation wichtiger Optimierungsprobleme 3.1 Das MIN- -TSP Wir kehren nochmal zurück zum Handlungsreisendenproblem für Inputs (w {i,j} ) 1 i
Proofs from THE BOOK (SS 2011)
") G. Veit Batz, Dennis Schieferdecker {batz,schieferdecker}@kit.edu http://algo2.iti.kit.edu/proofs_from_the_book_ss11.php - 0 KIT Batz, Universität Schieferdecker: des Landes Baden-Württemberg und nationales
G. Veit Batz, Dennis Schieferdecker {batz,schieferdecker}@kit.edu http://algo2.iti.kit.edu/proofs_from_the_book_ss11.php - 0 KIT Batz, Universität Schieferdecker: des Landes Baden-Württemberg und nationales
Technische Universität Wien Institut für Computergraphik und Algorithmen Arbeitsbereich für Algorithmen und Datenstrukturen
 Technische Universität Wien Institut für Computergraphik und Algorithmen Arbeitsbereich für Algorithmen und Datenstrukturen 186.172 Algorithmen und Datenstrukturen 1 VL 4.0 Übungsblatt 4 für die Übung
Technische Universität Wien Institut für Computergraphik und Algorithmen Arbeitsbereich für Algorithmen und Datenstrukturen 186.172 Algorithmen und Datenstrukturen 1 VL 4.0 Übungsblatt 4 für die Übung
2. Woche Eindeutige Entschlüsselbarleit, Sätze von Kraft und McMillan, Huffmancodierung
 2 Woche Eindeutige Entschlüsselbarleit, Sätze von Kraft und McMillan, Huffmancodierung 2 Woche: Eindeutige Entschlüsselbarleit, Sätze von Kraft und McMillan, Huffmancodierung 24/ 44 Zwei Beispiele a 0
2 Woche Eindeutige Entschlüsselbarleit, Sätze von Kraft und McMillan, Huffmancodierung 2 Woche: Eindeutige Entschlüsselbarleit, Sätze von Kraft und McMillan, Huffmancodierung 24/ 44 Zwei Beispiele a 0
Quicksort ist ein Divide-and-Conquer-Verfahren.
 . Quicksort Wie bei vielen anderen Sortierverfahren (Bubblesort, Mergesort, usw.) ist auch bei Quicksort die Aufgabe, die Elemente eines Array a[..n] zu sortieren. Quicksort ist ein Divide-and-Conquer-Verfahren.
. Quicksort Wie bei vielen anderen Sortierverfahren (Bubblesort, Mergesort, usw.) ist auch bei Quicksort die Aufgabe, die Elemente eines Array a[..n] zu sortieren. Quicksort ist ein Divide-and-Conquer-Verfahren.
Teil III. Komplexitätstheorie
 Teil III Komplexitätstheorie 125 / 160 Übersicht Die Klassen P und NP Die Klasse P Die Klassen NP NP-Vollständigkeit NP-Vollständige Probleme Weitere NP-vollständige Probleme 127 / 160 Die Klasse P Ein
Teil III Komplexitätstheorie 125 / 160 Übersicht Die Klassen P und NP Die Klasse P Die Klassen NP NP-Vollständigkeit NP-Vollständige Probleme Weitere NP-vollständige Probleme 127 / 160 Die Klasse P Ein
Kombinatorische Optimierung
 Juniorprof. Dr. Henning Meyerhenke 1 Henning Meyerhenke: KIT Universität des Landes Baden-Württemberg und nationales Forschungszentrum in der Helmholtz-Gemeinschaft www.kit.edu Vorlesungen 5 und 6 Programm
Juniorprof. Dr. Henning Meyerhenke 1 Henning Meyerhenke: KIT Universität des Landes Baden-Württemberg und nationales Forschungszentrum in der Helmholtz-Gemeinschaft www.kit.edu Vorlesungen 5 und 6 Programm
Kapitel 12: Schnelles Bestimmen der Frequent Itemsets
 Einleitung In welchen Situationen ist Apriori teuer, und warum? Kapitel 12: Schnelles Bestimmen der Frequent Itemsets Data Warehousing und Mining 1 Data Warehousing und Mining 2 Schnelles Identifizieren
Einleitung In welchen Situationen ist Apriori teuer, und warum? Kapitel 12: Schnelles Bestimmen der Frequent Itemsets Data Warehousing und Mining 1 Data Warehousing und Mining 2 Schnelles Identifizieren
5.2 Das All-Pairs-Shortest-Paths-Problem (APSP-Problem) Kürzeste Wege zwischen allen Knoten. Eingabe: Gerichteter Graph G =(V, E, c)
 Kürzeste Wege zwischen allen Knoten. Eingabe: Gerichteter Graph G =(V, E, c)") 5.2 Das All-Pairs-Shortest-Paths-Problem (APSP-Problem) Kürzeste Wege zwischen allen Knoten. Eingabe: Gerichteter Graph G =(V, E, c) mit V = {1,...,n} und E {(v, w) 1 apple v, w apple n, v 6= w}. c : E!
5.2 Das All-Pairs-Shortest-Paths-Problem (APSP-Problem) Kürzeste Wege zwischen allen Knoten. Eingabe: Gerichteter Graph G =(V, E, c) mit V = {1,...,n} und E {(v, w) 1 apple v, w apple n, v 6= w}. c : E!
Datenstrukturen & Algorithmen
 Datenstrukturen & Algorithmen Matthias Zwicker Universität Bern Frühling 2010 Übersicht Dynamische Programmierung Einführung Ablaufkoordination von Montagebändern Längste gemeinsame Teilsequenz Optimale
Datenstrukturen & Algorithmen Matthias Zwicker Universität Bern Frühling 2010 Übersicht Dynamische Programmierung Einführung Ablaufkoordination von Montagebändern Längste gemeinsame Teilsequenz Optimale
Geradenarrangements und Dualität von Punkten und Geraden
 Vorlesung Algorithmische Geometrie von Punkten und Geraden INSTITUT FÜR THEORETISCHE INFORMATIK FAKULTÄT FÜR INFORMATIK Martin Nöllenburg 12.06.2012 Dualitätsabbildung Bisher haben wir Dualität für planare
Vorlesung Algorithmische Geometrie von Punkten und Geraden INSTITUT FÜR THEORETISCHE INFORMATIK FAKULTÄT FÜR INFORMATIK Martin Nöllenburg 12.06.2012 Dualitätsabbildung Bisher haben wir Dualität für planare
Vorlesung 4 BETWEENNESS CENTRALITY
 Vorlesung 4 BETWEENNESS CENTRALITY 101 Aufgabe! Szenario: Sie arbeiten bei einem sozialen Online-Netzwerk. Aus der Netzwerk-Struktur Ihrer Benutzer sollen Sie wichtige Eigenschaften extrahieren. [http://www.fahrschule-vatterodt.de/
Vorlesung 4 BETWEENNESS CENTRALITY 101 Aufgabe! Szenario: Sie arbeiten bei einem sozialen Online-Netzwerk. Aus der Netzwerk-Struktur Ihrer Benutzer sollen Sie wichtige Eigenschaften extrahieren. [http://www.fahrschule-vatterodt.de/
Vorlesung Informatik 2 Algorithmen und Datenstrukturen
 Vorlesung Informatik 2 Algorithmen und Datenstrukturen (16 Dynamische Tabellen) Prof. Dr. Susanne Albers Dynamische Tabellen Problem: Verwaltung einer Tabelle unter den Operationen Einfügen und Entfernen,
Vorlesung Informatik 2 Algorithmen und Datenstrukturen (16 Dynamische Tabellen) Prof. Dr. Susanne Albers Dynamische Tabellen Problem: Verwaltung einer Tabelle unter den Operationen Einfügen und Entfernen,
Praktikum Planare Graphen
 1 Praktikum Planare Graphen Michael Baur, Martin Holzer, Steffen Mecke 10. November 2006 Einleitung Gliederung 2 Grundlagenwissen zu planaren Graphen Themenvorstellung Gruppeneinteilung Planare Graphen
1 Praktikum Planare Graphen Michael Baur, Martin Holzer, Steffen Mecke 10. November 2006 Einleitung Gliederung 2 Grundlagenwissen zu planaren Graphen Themenvorstellung Gruppeneinteilung Planare Graphen
Uberblick 1. Kurzeste Wege 2. Sichtbarkeitsgraphen 3. Berechnung des Sichtbarkeitsgraphen 4. Kurzeste Wege fur polygonale Roboter 1
 Vorlesung Geometrische Algorithmen Sichtbarkeitsgraphen und kurzeste Wege Sven Schuierer Uberblick 1. Kurzeste Wege 2. Sichtbarkeitsgraphen 3. Berechnung des Sichtbarkeitsgraphen 4. Kurzeste Wege fur polygonale
Vorlesung Geometrische Algorithmen Sichtbarkeitsgraphen und kurzeste Wege Sven Schuierer Uberblick 1. Kurzeste Wege 2. Sichtbarkeitsgraphen 3. Berechnung des Sichtbarkeitsgraphen 4. Kurzeste Wege fur polygonale
Branch-and-Bound. Wir betrachten allgemein Probleme, deren Suchraum durch Bäume dargestellt werden kann. Innerhalb des Suchraums suchen wir
 Effiziente Algorithmen Lösen NP-vollständiger Probleme 289 Branch-and-Bound Wir betrachten allgemein Probleme, deren Suchraum durch Bäume dargestellt werden kann. Innerhalb des Suchraums suchen wir 1.
Effiziente Algorithmen Lösen NP-vollständiger Probleme 289 Branch-and-Bound Wir betrachten allgemein Probleme, deren Suchraum durch Bäume dargestellt werden kann. Innerhalb des Suchraums suchen wir 1.
Einführung in Heuristische Suche
 Einführung in Heuristische Suche Beispiele 2 Überblick Intelligente Suche Rundenbasierte Spiele 3 Grundlagen Es muss ein Rätsel / Puzzle / Problem gelöst werden Wie kann ein Computer diese Aufgabe lösen?
Einführung in Heuristische Suche Beispiele 2 Überblick Intelligente Suche Rundenbasierte Spiele 3 Grundlagen Es muss ein Rätsel / Puzzle / Problem gelöst werden Wie kann ein Computer diese Aufgabe lösen?
Rolf Wanka Sommersemester Vorlesung
 Peer-to to-peer-netzwerke Rolf Wanka Sommersemester 2007 10. Vorlesung 28.06.2007 rwanka@cs.fau.de basiert auf einer Vorlesung von Christian Schindelhauer an der Uni Freiburg Inhalte Kurze Geschichte der
Peer-to to-peer-netzwerke Rolf Wanka Sommersemester 2007 10. Vorlesung 28.06.2007 rwanka@cs.fau.de basiert auf einer Vorlesung von Christian Schindelhauer an der Uni Freiburg Inhalte Kurze Geschichte der
Stefan Schmid TU Berlin & T-Labs, Berlin, Germany. Reduktionen in der Berechenbarkeitstheorie
 Stefan Schmid TU Berlin & T-Labs, Berlin, Germany Reduktionen in der Berechenbarkeitstheorie Problem: Wie komme ich von hier zum Hamburger Hbf? 2 Beispiel P1 Wie komme ich von hier zum Hamburger Hbf? kann
Stefan Schmid TU Berlin & T-Labs, Berlin, Germany Reduktionen in der Berechenbarkeitstheorie Problem: Wie komme ich von hier zum Hamburger Hbf? 2 Beispiel P1 Wie komme ich von hier zum Hamburger Hbf? kann
Kapitel 2: Analyse der Laufzeit von Algorithmen Gliederung
 Gliederung 1. Motivation / Einordnung / Grundlagen 2. Analyse der Laufzeit von Algorithmen 3. Untere Schranken für algorithmische Probleme 4. Sortier- und Selektionsverfahren 5. Paradigmen des Algorithmenentwurfs
Gliederung 1. Motivation / Einordnung / Grundlagen 2. Analyse der Laufzeit von Algorithmen 3. Untere Schranken für algorithmische Probleme 4. Sortier- und Selektionsverfahren 5. Paradigmen des Algorithmenentwurfs
Kapitel MK:IV. IV. Modellieren mit Constraints
 Kapitel MK:IV IV. Modellieren mit Constraints Einführung und frühe Systeme Konsistenz I Binarization Generate-and-Test Backtracking-basierte Verfahren Konsistenz II Konsistenzanalyse Weitere Analyseverfahren
Kapitel MK:IV IV. Modellieren mit Constraints Einführung und frühe Systeme Konsistenz I Binarization Generate-and-Test Backtracking-basierte Verfahren Konsistenz II Konsistenzanalyse Weitere Analyseverfahren
Informatik II, SS 2014
 Informatik II SS 2014 (Algorithmen & Datenstrukturen) Vorlesung 11 (4.6.2014) Binäre Suchbäume II Algorithmen und Komplexität Binäre Suchbäume Binäre Suchbäume müssen nicht immer so schön symmetrisch sein
Informatik II SS 2014 (Algorithmen & Datenstrukturen) Vorlesung 11 (4.6.2014) Binäre Suchbäume II Algorithmen und Komplexität Binäre Suchbäume Binäre Suchbäume müssen nicht immer so schön symmetrisch sein
Datenbankanwendung. Prof. Dr.-Ing. Sebastian Michel TU Kaiserslautern. Wintersemester 2014/15. smichel@cs.uni-kl.de
 Datenbankanwendung Wintersemester 2014/15 Prof. Dr.-Ing. Sebastian Michel TU Kaiserslautern smichel@cs.uni-kl.de Wiederholung: Anfragegraph Anfragen dieses Typs können als Graph dargestellt werden: Der
Datenbankanwendung Wintersemester 2014/15 Prof. Dr.-Ing. Sebastian Michel TU Kaiserslautern smichel@cs.uni-kl.de Wiederholung: Anfragegraph Anfragen dieses Typs können als Graph dargestellt werden: Der
Klausur Algorithmen und Datenstrukturen II 29. Juli 2013
 Technische Universität Braunschweig Sommersemester 2013 Institut für Betriebssysteme und Rechnerverbund Abteilung Algorithmik Prof. Dr. Sándor P. Fekete Stephan Friedrichs Klausur Algorithmen und Datenstrukturen
Technische Universität Braunschweig Sommersemester 2013 Institut für Betriebssysteme und Rechnerverbund Abteilung Algorithmik Prof. Dr. Sándor P. Fekete Stephan Friedrichs Klausur Algorithmen und Datenstrukturen
Lösungen zur 1. Klausur. Einführung in Berechenbarkeit, formale Sprachen und Komplexitätstheorie
 Hochschuldozent Dr. Christian Schindelhauer Paderborn, den 21. 2. 2006 Lösungen zur 1. Klausur in Einführung in Berechenbarkeit, formale Sprachen und Komplexitätstheorie Name :................................
Hochschuldozent Dr. Christian Schindelhauer Paderborn, den 21. 2. 2006 Lösungen zur 1. Klausur in Einführung in Berechenbarkeit, formale Sprachen und Komplexitätstheorie Name :................................